Anwendungen von OPVs
Werbung

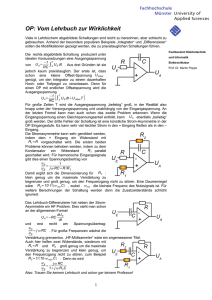
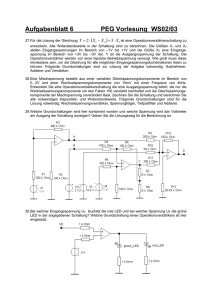
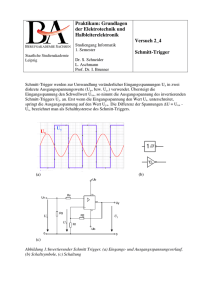
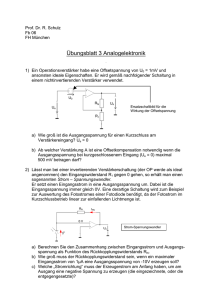
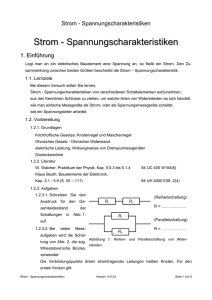
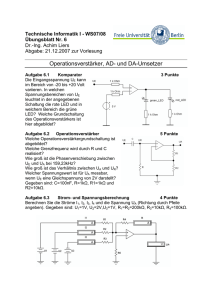
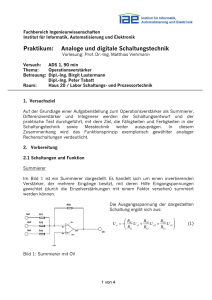
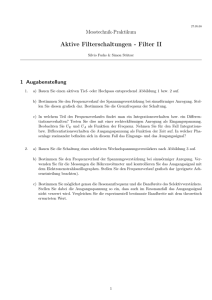
TECHNISCHE UNIVERSITÄT ILMENAU Fakultät für Elektrotechnik und Informationstechnik Fachgebiet Elektronische Schaltungen und Systeme Anwendungen von OPVs Versuch 7 im Informationselektronischen Praktikum Studiengang Elektrotechnik und Informationstechnik 2. Studienschwerpunkt: Mikro-, Nanoelektronik und Elektrotechnologie (BA) Betreuer: Dr.-Ing. Steffen Arlt Raum H3511, Tel. 691165 Praktikumsraum: H3521B Verwendete Formelzeichen αn, αp - Widerstandsverhältnisse v - Verstärkung allgemein v0 - Gleichspannungsverstärkung VGL - Gleichtaktverstärkung VD - Differenzverstärkung G - Gleichtaktunterdrückung IS - Sättigungsstrom der Diode ICS - Kollektorsättigungsstrom des Transistors UBE - Basis-Emitterspannung des Transistors Ua - Ausgangsspannung Ue - Eingangsspannung Rg - Gyratorwiderstand Q - Güte fg - -3dB Grenzfrequenz fgu - untere -3dB Grenzfrequenz fgo - obere -3dB Grenzfrequenz fr - Resonanzfrequenz B - 3dB Bandbreite XC, XL - Scheinwiderstände von Kondensator und Spule ω Kreisfrequenz ω = 2πf - Inhaltsverzeichnis 1. Versuchsziel ........................................................................................................ 1 2. Theoretische Grundlagen .................................................................................. 1 2.1 Der Differenzverstärker ............................................................................ 1 2.2 Der Logarithmierer ................................................................................... 3 2.3 Der Präzisionsgleichrichter ...................................................................... 5 2.4 Der Gyrator ............................................................................................... 7 2.5 Der aktive Tiefpass ................................................................................... 8 3. Praktikumsvorbereitungen ............................................................................. 11 3.1 Der Differenzverstärker .......................................................................... 11 3.2 Der Logarithmierer ................................................................................. 12 3.3 Der Präzisionsgleichrichter .................................................................... 13 3.4 Der Gyrator ............................................................................................. 14 3.5 Der aktive Tiefpass ................................................................................. 15 4. Praktikumsaufgaben ........................................................................................ 16 4.1 Der Differenzverstärker .......................................................................... 16 4.2 Der Logarithmierer ................................................................................. 16 4.3 Der Präzisionsgleichrichter .................................................................... 17 4.4 Der Gyrator ............................................................................................. 18 4.5 Der aktive Tiefpass ................................................................................. 19 1. Versuchsziel Im vorliegenden Versuch wird der OPV in einigen praktischen Anwendungen untersucht werden. Theoretische Grundlagen, praktische Messungen und simulierte Ergebnisse sollen eine Einheit bilden. Bei den realisierten Schaltungen handelt es sich um Differenzverstärker, logarithmischen Verstärker, Präzisionsgleichrichter, Gyrator und aktiven Tiefpass. 2. Theoretische Grundlagen 2.1. Der Differenzverstärker Der Differenzverstärker zählt zu den Grundschaltungen der Operationsverstärkertechnik. Er zeichnet sich dadurch aus, dass er die Differenz zwischen zwei an den Eingängen anliegenden Spannungen bildet. Abb. 1: Schaltungsstruktur eines Differenzverstärkers Im Gegensatz zu einem normalen Verstärker, der alle an seinem Eingang anliegenden Signale gleichartig verstärkt, hat der Differenzverstärker gleichzeitig zwei völlig unterschiedliche Aufgaben zu lösen. Er muss das Nutzsignal mit möglichst hoher Differenzverstärkung verstärken, darf aber die vorwiegend als Gleichtaktsignale auftretenden Störsignale möglichst gar nicht verstärken. Die in der Ersatzschaltung angenommene Gleichtaktquelle ist dabei nicht in Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 1 konzentrierter Form als Bauelement vorhanden, sondern wird durch äußere Einflüsse, wie Temperaturschwankungen, Änderungen der Versorgungsspannung, Einstreuungen auf die Zuleitungen sowie andere Umwelteinflüsse hervorgerufen. Ein ideal symmetrisch aufgebauter Differenzverstärker muss bei erzwungener Gleichtaktaussteuerung eine Ausgangsspannung Ua=0V abgeben. In diesem Fall ist die Gleichtaktverstärkung VGL=0. /1/, /2/ Zur Erklärung der Funktionsweise kann man die Eingänge des Differenzverstärkers einmal getrennt betrachten. Der Differenzverstärker lässt sich aus zwei Grundschaltungen des OPV zusammensetzen. Im ersten Fall wird U e2 = 0 gesetzt, es entsteht die gewöhnliche invertierende Grundschaltung mit der Verstärkung −α n . Die Ausgangsspannung ergibt sich zu: U an = −α n ⋅ U e1 (1) Im zweiten Fall wird U e1 = 0 gesetzt und die Schaltung arbeitet als Elektrometerverstärker mit vorgeschaltetem Spannungsteiler. Für die Ausgangsspannung gilt in diesem Fall: U ap = αp 1+ αp (1 + α ) ⋅ U n e2 (2) Aus der Kombination dieser beiden Teilschaltungen ergibt sich der in Abb. 1 dargestellte Differenzverstärker mit folgender Beziehung für die Ausgangsspannung: U a = α(U e 2 − U e1 ), wenn α = α n = α p (3) Sind α n ≠ α p , dann bildet die Schaltung nicht exakt die Differenz der Eingangsspannungen und es gilt die Beziehung (4) : Ua = 1 + αn α U − α nU e1 1 + α p p e2 (4) Die neben der Differenzverstärkung wichtigste Eigenschaft des OPV, die Gleichtaktverstärkung VGL beziehungsweise die daraus abgeleitete Gleichtaktunterdrückung G, lässt sich am leichtesten durch eine künstliche Gleichtaktaussteuerung ermitteln. Praktisch wird meist die Gleichtaktunterdrückung angegeben. Eine Gleichtaktaussteuerung erreicht man, indem beide Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 2 Eingänge der Verstärkerschaltung miteinander verbunden und mit gleicher Eingangsspannung ausgesteuert werden. Theoretisch müsste jetzt die Ausgangsspannung α = α n = α p nach (3) und U a = α p − αn 1+ αp Ua = 0 für ⋅ U e für α ≠ α n ≠ α p nach (4) sein. Praktisch sind diese Werte aufgrund des Gleichtaktaussteuerverhaltens des OPV und der Widerstandstoleranzen nicht erreichbar. Die Gleichtaktunterdrückung, auch CMRR (common mode rejection ratio) genannt, berechnet sich nach : G= ( ( ) ) V D 1 (1 + α n ) ⋅ α p + 1 + α p ⋅ α n = VGl 2 (1 + α n ) ⋅ α p − 1 + α p ⋅ α n (5) Für α=αn=αp ergibt sich der theoretische Wert von G=∞. 2.2. Der Logarithmierer Eine weitere interessante Schaltung der analogen Rechentechnik ist der Logarithmierer. Er besitzt die Eigenschaft, eine logarithmische Übertragungskennlinie zwischen Ein- und Ausgangsspannung zu realisieren ( Abbildung 2 ). 2 ,5 Ue 2 1 ,5 1 0 ,5 Ua 9 8 7 6 5 4 3 2 1 0 0 -0 ,5 -1 -1 ,5 -2 -2 ,5 Abb. 2: typische Übertragungskennlinie eines Logarithmierers Bei der Übertragungskennlinie handelt es sich um eine Funktion des natürlichen Logarithmus, da für die Erzeugung dieser Funktion ein mit einer Diode bzw. Transistor rückgekoppelter OPV verwendet wird. Die Dioden bzw. Transistoren besitzen eine Exponentialfunktion als Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 3 Kennlinie. Für die in Abb. 3 und 4 dargestellten Prinzipschaltungen gelten demnach die folgenden Beziehungen: Abb. 3: Logarithmierer mit Diode U a = −mU T ⋅ ln Ue für U e > 0 I S R1 mit: I A = I S e U AK mU T Abb. 4: Logarithmierer mit Transistor (6) U a = −U T ln Ue für U e > 0 I CS R1 mit: I C = I CS e (7) U BE U T Abbildung 3 und 4 zeigen zwei mögliche Realisierungen für den Logarithmierer. Da die Schaltung in Abb. 4 einige Vorteile bietet, stellt sie die für die Praxis günstigere Lösung dar. Der Wegfall des Korrekturfaktors m aus Schaltung 3 ist der wesentliche Vorteil, da dieser Faktor unbestimmt ist, und zwischen 1 und 2 liegt. Weiterhin tritt bei der Schaltung mit Transistor keine Verfälschung der Kennlinie durch den Kollektor-Basis-Sperrstrom auf, da UCB=0 ist. Die Stromverstärkung geht ebenfalls nicht in das Ergebnis ein, da der Basisstrom nach Masse abfließt. Nachteilig ist jedoch die relativ hohe Schwingneigung, die dadurch verursacht wird, daß der Transistor die Schleifenverstärkung um seine Spannungsverstärkung erhöht. Um diese Schwingneigung zu vermindern, ist der Widerstand RE in die Schaltung eingefügt worden. Eine weitere Verbesserung bringt der Kondensator C mit sich ( Frequenzgangkorrektur ). Literaturhinweise finden Sie in /3/. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 4 2.3. Der Präzisionsgleichrichter In der elektronischen Messtechnik sind häufig Wechselgrößen zu messen. Da Messgeräte ( vor allem digitale ) aber meist nur Gleichgrößen direkt messen können, muss eine Möglichkeit gefunden werden, die Wechselgrößen in dazu äquivalente Gleichgrößen umzuwandeln. Leider besitzen die in Gleichrichtern eingesetzten Dioden immer eine Flussspannung (vom Strom nahezu unabhängiger Spannungsabfall), die dazu führt, dass der angezeigte Wert um genau diesen Wert vom wahren Messwert abweicht. Bei Spannungen, die kleiner als die Flussspannung (≈0,7V für Siliziumdioden) sind, zeigt das anzeigende Messgerät gar nichts mehr an. Um diesen Fehler zu umgehen, werden aktive Gleichrichter eingesetzt. Eine mögliche Realisierung ist der Präzisionsgleichrichter. Es handelt sich dabei um einen, mit OPV realisierten, Vollweggleichrichter. Seine Ausgangsspannung ergibt sich zu : ⎧ Ue Ua = ⎨ ⎩ −U e für U e ≥ 0⎫ ⎬ ⇒Ua = Ue für U e ≤ 0⎭ (8) Der Vorteil gegenüber der Realisierung mit Dioden besteht darin, dass in weiten Grenzen mit beliebig kleinen Spannungen gearbeitet werden kann. Einen Nachteil besitzt jedoch auch diese Schaltung: es wird nicht der Effektivwert ermittelt, sondern der Betrag der Eingangsspannung. Für rein sinusförmige Signale wird dann das anzeigende Messgerät, welches auch noch die Glättung der pulsierenden Gleichspannung übernehmen muss, auf den Effektivwert geeicht, da diese Signalform in der Praxis am häufigsten auftritt. Es ist zwar auch ein Abgleich auf andere Signalformen möglich, jedoch ist immer nur eine Form einstellbar. Für jede andere wird ein falscher Wert angezeigt. Mit sehr hohem Aufwand können jedoch auch echte Effektivwertgleichrichter hergestellt werden, die dann für jede beliebige Signalform den Effektivwert anzeigen. /4/ Die Funktionsweise des Präzisionsgleichrichters zeigen die Abb. 5 und 6. Der Verstärker OPV1 mit seiner Beschaltung arbeitet als invertierender Einweggleichrichter. Bei positiven Eingangsspannungen besitzt er eine Spannungsverstärkung v' = −1 (wegen gesperrter Diode D2)., bei negativen Eingangsspannungen wird die Schaltung zu einem invertierenden Verstärker mit der „Verstärkung“ v' = 0 . Am Punkt U1 ergeben sich Spannungen nach Gleichung (9) (Darstellung Abb. 6 - 3. von oben). Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 5 ⎧ −U e U1 = ⎨ ⎩ 0 für U e ≥ 0 für U e ≤ 0 (9) U aOPV 2 = −(U e + 2U1 ) (10) Abb. 5: Prinzipschaltung des Präzisionsgleichrichters Da es sich bei einem Präzisionsgleichrichter aber um eine Vollweggleichrichter handelt, wird noch eine weitere Schaltung benötigt. Diese Aufgabe übernimmt OPV2 mit seiner Beschaltung. Er stellt einen invertierenden Summationsverstärker dar und bildet den Ausdruck U aOPV 2 = −(U e + 2U1 ) . In Verbindung mit Gleichung (9) ergibt für die Ausgangsspannung des Präzisionsgleichrichters die Gleichung (8) und schematisch der Verlauf aus Abb. 6 oben. Abb. 6: Signale des Präzisionsgleichrichters von Abbildung 5 Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 6 2.4 Der Gyrator Der Gyrator ist eine Transformationsschaltung, die eine Impedanz in ihre dazu duale umwandeln kann. Die Umwandlung einer Kapazität in eine Induktivität wird zum Beispiel in der Mikroelektronik genutzt. Kapazitäten lassen sich bis zu bestimmten Größen ( einige pF bis wenige nF ) integrieren. Bei Induktivitäten ist dies sehr viel schwerer. Deshalb können an dieser Stelle Gyratoren vorteilhaft eingesetzt werden. Die erreichbare Güte der Induktivität liegt ebenfalls deutlich höher, als bei vergleichbaren integrierten Induktivitäten. Der hier vorgestellte Gyrator besteht aus einer Kombination von zwei INIC’s ( Negativ Impedance Converter) /5/. Diese haben die Eigenschaft, einen negativen Eingangswiderstand zu erzeugen. Ein INIC lässt sich prinzipiell nur mit aktiven Bauelementen realisieren und ein OPV ist dafür sehr gut geeignet. Abb. 7: Schaltzeichen und Blockschaltbild eines Gyrators Um den Gyrator als induktiv wirkendes Bauelement nutzen zu können, wird an die Klemmen, an denen U2 abgegriffen wird, ein Kondensator mit der Kapazität C angeschlossen. Der Eingang wirkt dann wie eine Spule mit der Induktivität: L = Rg2 C (11) Aus Gleichung (11) ist ein weiterer Vorteil erkennbar. Die Kapazität wird um den Faktor Rg2 vergrößert. Damit ergibt sich für Rg=1KΩ und C=0,1μF eine scheinbare Induktivität von L=100mH am Eingang und für Rg=10KΩ und C=0,1μF ein L=10H. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 7 Schaltet man zu dieser Induktivität einen weiteren Kondensator parallel, erhält man einen LCParallelschwingkreis von sehr hoher Güte. Anwendungsbeispiele und Dimensionierungshinweise zeigt /5/. Die Güte dieses Parallelschwingkreises ist ein geeignetes Maß für die Bestimmung der Abweichung des realen vom idealen Gyrators. Sie wird als Gyratorgüte bezeichnet. Die Verluste können durch zwei Verlustwiderstände ausgedrückt werden, die jeweils parallel zum Ein- und Ausgang des Gyrators liegen. Die Gyratorgüte lässt sich dann nach (12) bestimmen: Q= Rv 2 Rg (12) Messtechnisch kann die Güte des Schwingkreises über die Resonanzfrequenz und die Bandbreite des Schwingkreises bestimmt werden. Dazu ist eine Frequenzganguntersuchung der Schaltungsanordnung notwendig. Mit den nachfolgenden Gleichungen ist die Bestimmung der Güte und somit der Verlustwiderstände möglich: Bandbreite : B = f go − f gu (13) Güte : Q= fr B (14) Rv = Q ⋅ 2 Rg (15) Verlustwiderstand: 2.5 Der aktive Tiefpass Der integrierte Operationsverstärker lässt sich sehr vorteilhaft als aktives Element zum Aufbau von aktiven RC-Schaltungen verwenden. Das mit passiven RC-Netzwerken zusammengeschaltete aktive Element gestattet es, auch ohne die Anwendung von Induktivitäten Übertragungsfunktionen mit beliebiger Pol-Nullstellen-Verteilung zu realisieren. Der Verzicht auf Induktivitäten bringt in erster Linie bei niedrigen Frequenzen Vorteile mit sich. Der Operationsverstärker wird dabei als spannungsgesteuerte Spannungsquelle oder als NIC (Negativ Impedance Converter) zur Realisierung von aktiven RC-Filtern verwendet. Der als gesteuerte Spannungsquelle betriebene Operationsverstärker kann dabei mit einfacher oder mehrfacher Rückkopplung betrieben werden. /6/ Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 8 Bei der hier behandelten Schaltung handelt es sich aus Gründen der Einfachheit und Überschaubarkeit um einen aktiven Tiefpass 1. Ordnung. Um den invertierenden OPV mit einem definierten Tiefpassverhalten betreiben zu können, wird der Rückkoppelwiderstand durch einen frequenzabhängigen Widerstand ersetzt. In Gleichung (16) ist die Verstärkungsgleichung des invertierenden OPV angegeben. V =− Rr Re (16) (mit Rr-Rückkoppelwiderstand und Re- Widerstand am Eingang) Um nach höheren Frequenzen einen Verstärkungsabfall zu erreichen, muss entweder Rr kleiner oder Re größer werden. Ein variabler Re wäre bei der Anpassung an die Eingangsbeschaltung schlecht, deshalb sollte nur Rr geändert werden. Als frequenzabhängige Bauelemente können Spulen oder Kondensatoren verwendet werden. Das Frequenzverhalten dieser beiden zeigen Gleichung (17) und (18): XC = 1 ωC (17) X L = ωL (18) Da ein Widerstand benötigt wird, der mit zunehmender Frequenz seinen Wert verringert, kommt für diese Anwendung nur der Kondensator in Betracht. Soll die Schaltung als Integrator arbeiten, muss ebenfalls ein Kondensator eingesetzt werden, da er die ihm zugeführte Energie wesentlich leichter speichern kann als eine Spule. Ein wesentlicher Vorteil des aktiven gegenüber dem passiven Tiefpass ist die Unabhängigkeit von Ein- und Ausgangswiderstand der Schaltung von der Frequenz. Für die Integratoranwendung spielt noch ein weiterer Vorteil eine wichtig Rolle - die relative Langzeitkonstanz der Ausgangsspannung, wenn der Integrator in einer Sample&Hold - Schaltung eingesetzt wird. Diese findet in der Messtechnik bei Analog-Digital-Wandlern als Eingangsstufe Verwendung. Sie dient dazu, die Eingangsspannung abzutasten und den Abtastwert eine gewisse Zeit konstant am Ausgang zur Verfügung zu stellen. Der Integrator bildet dabei die Halteschaltung. Einen wesentlichen Unterschied zwischen Integrator und aktivem Tiefpass gibt es jedoch der in Abb. 8 gestrichelt eingezeichnete Widerstand R. Beim aktiven Tiefpass wird er benötigt, um die Verstärkung bei geringen Frequenzen, bei denen der Scheinwiderstand des Kondensators Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 9 Abb. 8: Schaltbild des aktiven Tiefpass bzw. Integrators gegen unendlich geht, zu begrenzen, beim Integrator darf er jedoch keinesfalls vorhanden sein. Die Grenzfrequenz des aktiven Tiefpass ist relativ leicht zu bestimmen. Das Verhältnis R R e bestimmt dabei die Grundverstärkung bei Frequenzen unterhalb der Grenzfrequenz und die Grenzfrequenz selbst wird mittels Gleichung (19) bestimmt: fg = Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 1 2πRC (19) Seite : 10 3. Praktikumsvorbereitungen 3.1 Der Differenzverstärker R1 R2 100K 100K 470K 100K 1M 1M einstellbare Widerstandswerte 1. Abb. 9: Schaltung des Differenzverstärkers Simulieren Sie die Schaltung in Abb. 9 mit VDD = −VCC = 15V in PSPICE. Hinweis: In PSPICE gibt es leider keine Möglichkeit Parametervariationen, wie sie für die Widerstandspaare R1 und R2 notwendig wären, durchzuführen. Daher müssen Sie bei den Simulationen jeweils 3 verschiedene Läufe durchführen und dazu im Beschreibungsfile die Werte verändern. 2. Bestimmen Sie für die 3 Widerstandspaarungen jeweils das Gleichspannungsverhalten für Ue1-variabel, wenn Ue2=0V, =0.1V, =0.5V, =1V und =2V und für Ue2-variabel, wenn Ue1=0V, =0.1V, =0.5V, =1V und =2V ist. Simulieren Sie die Eingangsspannung jeweils im Bereich von 0V bis 2V und ermitteln Sie die Differenzverstärkung 3. Berechnen Sie mit Gleichung (5) die theoretische Gleichtaktunterdrückung für die 3 Widerstandspaarungen. 4. Verbinden Sie die Eingänge Ue1 und Ue2 miteinander und simulieren Sie das Gleichspannungsverhalten wiederum für die drei Widerstandspaarungen. Ermitteln Sie die Gleichtaktverstärkung und die Gleichtaktunterdrückung. Verwenden Sie dazu die Differenzverstärkungen von Teilaufgabe 2. Vergleichen Sie die simulierten Werte mit den theoretisch berechneten. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 11 3.2 Der Logarithmierer Abb. 10: Schaltbild des Logarithmierers 1. Bestimmen Sie mittels PSPICE die Gleichspannungsübertragungskennlinie bei R1=1KΩ und R1=10KΩ. Verwenden Sie das Transistormodel Q2N2222. Kontrollfrage: Wie würde sich die Schaltung bei Austeuerung mit einem Sinussignal verhal- ten? Wie wird das Ausgangssignal beeinflusst? Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 12 3.3 Der Präzisionsgleichrichter Abb. 11: Schaltbild des Präzisionsgleichrichters 1. Simulieren Sie die in Abbildung 11 dargestellte Schaltung mit PSPICE. Die Betriebsspannung beträgt ±15V. Verwenden Sie als Eingangsspannung eine Sinusquelle. 2. Führen Sie jeweils bei den Eingangsspannungen Ue=100mV und Ue=1V eine Transientenanalyse für die Frequenzen f=10Hz, 1KHz, 50KHz sowie 1MHz durch. Hinweis: Für die Transientenanalyse sollten Sie folgende Anweisung verwenden: .TRAN <print step> <final time> <no-print> <step ceiling> mit printstep = 3. 1 4 2 1 , final time = , no print = und step ceiling = . 1000 ⋅ f f f 100 ⋅ f Betrachten Sie das Verhalten der Schaltung an den Punkten U1 und Ua in Bezug auf die Eingangsspannung. 4. Führen Sie für die 2 Eingangsspannungen Ue=100mV und Ue=1V jeweils eine Wechselspannungsanalyse mit logarithmischer Darstellung der Frequenzachse durch und bestimmen Sie die Grenzfrequenzen für jede Eingangsspannung. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 13 3.4 Der Gyrator Abb. 12: Schaltbild des Gyrators 1. Simulieren Sie die Schaltung nach Abb. 12 mit PSPICE. Der Gyrator soll die Induktivität des mit Ci aufgebauten Parallelschwingkreises darstellen. Um die Simulation durchführen zu können, muss der Widerstand Ri eingefügt werden. 2. Führen Sie für die in der folgenden Tabelle angegebenen Bauelementewerte eine Frequenzgangsimulation durch. Mittels der Gleichungen in Abschnitt 2.4 lassen sich die zu erwartenden Induktivitätswerte berechnen. Führen Sie diese Berechnungen durch, und simulieren Sie parallel zu der Gyratorschaltung einen idealen Schwingkreis mit den gleichen Bauelementewerten für Ri, Ci und CL. Der Wert von Ri beträgt bei allen Berechnungen 2,7KΩ 3. Simulation CL Ci R1-R7 1 47nF 2,2µF 1KΩ 2 47nF 2,2µF 10KΩ 3 1nF 2,2µF 1KΩ 4 1nF 2,2µF 10KΩ Bestimmen Sie aus den Simulationen die Resonanzfrequenz fr, die untere sowie obere Grenzfrequenz fgu bzw. fgo und die Güte des Schwingkreises. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 14 3.5 Der aktive Tiefpass 1. Leiten Sie die Gleichung (19) aus Abschnitt 2.5 her. Gehen Sie dabei vom invertierenden OPV aus. Abb. 13: Schaltbild des aktiven Tiefpass 2. 3. Berechnen Sie für Re=10KΩ die Werte für R und C unter folgenden Bedingungen: a) fg=1.6KHz, vo=10 und b) fg=16KHz, vo=1. Simulieren Sie das Frequenzverhalten für die in 2. berechneten Werte, bei Ue=100mV. Bestimmen Sie die Grenzfrequenz und die Gleichspannungsverstärkung vo. Vergleichen Sie diese mit den Vorgaben aus 2. 4. Simulieren Sie einen einfachen passiven RC-Tiefpass mit R=10KΩ und den Werten für C aus 2. und vergleichen Sie das Frequenz- und Phasenverhalten von aktiven und passiven Tiefpass. Kontrollfrage: Aus welchem Grunde kann die Schaltung in Abb. 13 nicht als Integrator ver- wendet werden? Welche Nachteile besitzen Induktivitäten? Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 15 4. Praktikumsaufgaben 4.1 Der Differenzverstärker 1. Verbinden Sie den Eingang Ue2 mit dem Gleichspannungsausgang U2. An den Eingang Ue1 schließen Sie den Gleichsspannungsausgang U1 an. Schließen Sie an die beiden Eingänge und den Ausgang des Differenzverstärkers jeweils ein Digitalvoltmeter an. Stellen Sie beide Spannungsregler auf Linksanschlag. Durch langsames Rechtsdrehen können Sie die Eingangsspannung erhöhen. Ermitteln Sie nun für die 3 Widerstandspaare und die Spannungsvorgaben aus Abschnitt 3.1 Aufgabe 2. das Gleichspannungsverhalten der Schaltung. 2. Entfernen Sie die Verbindung von U2 und Ue2, verbinden Sie Ue1 mit Ue2 und verwenden U1 als Eingangsspannung. Nehmen Sie jetzt die Gleichtaktunterdrückung, ebenfalls für die 3 Widerstandspaarungen, auf. 3. Diskutieren Sie die Unterschiede der Simulationsergebnisse und der gemessenen Kurven. 4.2 Der Logarithmierer 1. Schalten Sie an Eingang und Ausgang je ein Digitalvoltmeter an ( Messbereich von 20V-DC ). Verbinden Sie den Eingang Ue mit dem Gleichspannungsausgang U1. Nehmen Sie die Ausgangsspannung in Abhängigkeit von der Eingangsspannung auf. Beginnen Sie mit Re=1KΩ und führen Sie die Messung nochmals mit Re=10KΩ durch. 2. Vergleichen Sie die Messergebnisse mit den Simulationsergebnissen. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 16 4.3 Der Präzisionsgleichrichter Verhaltensbeurteilung 1. Beschalten Sie den Präzisionsgleichrichter entsprechend Abb. 14. Anstelle des Digitalvoltmeters am Ausgang Ua verwenden Sie den YB-Eingang des Oszillographen. An den Ausgang U1 schalten Sie den YA-Eingang des Oszillographen. Für den Frequenzgenerator verwenden Sie einen NF-Generator. Schalten Sie den Oszillographen in die Betriebsart „ALT“. Abb. 14: Beschaltung des Präzisionsgleichrichters 2. Stellen Sie den Zeitmaßstab am Oszillographen auf 2ms/T und die Eingangsempfindlichkeit auf jeweils 0,1V/T. Die Taste „CAL“ muss gedrückt sein. 3. Stellen Sie die Ausgangsspannung des NF-Generators bei f=1KHz auf etwa 100mV. 4. Sehen Sie sich im Frequenzbereich von 1Hz bis 1MHz die Signalformen an den beiden Ausgängen des Präzisionsgleichrichter an, beurteilen Sie diese und vergleichen Sie sie mit den Ergebnissen der Simulation aus Abschnitt 3.3. Korrigieren Sie jeweils die Zeitbasiseinstellung am Oszillographen so, dass Sie die Signalform gut erkennen können. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 17 Hinweis: Bei niedrigen Frequenzen kann es sinnvoll sein, den Oszillographen in die Betriebsart „CHOP“ zu schalten. Sie können damit ein wesentlich ruhigeres Bild erreichen. Frequenzganguntersuchung 1. Verwenden Sie am Ausgang Ua anstelle des Oszillographen ein Digitalvoltmeter (Messbereich 200mV DC). Schalten Sie den Oszillographen in die Betriebsart „YA“. Stellen Sie am NF-Generator f=1KHz ein und regeln Sie dessen Ausgangsspannung so, daß das Digitalvoltmeter relativ genau 100mV anzeigt. 2. Beginnen Sie nun bei etwa f=5Hz mit der Aufnahme der Frequenzgangkennlinie. Beobachten Sie auch weiterhin den Oszillographen, um Schlussfolgerungen aus der Signalform auf die Ausgangsspannung ziehen zu können. Hinweis: Die Ausgangsspannung wird von dem Digitalvoltmeter nicht besonders stabil angezeigt. Nehmen Sie einen günstigen Mittelwert auf. Kontrollfrage: Wieso wird die Ausgangsspannung vom Digitalvoltmeter bei niedrigen Fre- quenzen nicht mehr stabil angezeigt? 3. Wiederholen Sie die Schritte 1. und 2. für Ue=1V. 4.4 Der Gyrator Abb. 15: Schaltbild des Gyrators 1. Schließen Sie an den Eingang Ue den NF-Generator an. Verwenden Sie am Ausgang das NF-Millivoltmeter. Schalten Sie den Gyratorwiderstand Rg auf 1KΩ. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 18 2. Wählen Sie am NF-Millivoltmeter den Messbereich 100mV. Stellen Sie am NFGenerator etwa 100mV als Ausgangsspannung ein. Suchen Sie jetzt die Resonanzfrequenz des „Schwingkreises“, indem Sie die Frequenz durchstimmen und den maximalen Ausschlag des Millivoltmeters suchen. Eventuell müssen Sie die Eingangsspannung etwas korrigieren. Bei der Resonanzfrequenz korrigieren Sie die Eingangsspannung nun soweit, dass der Millivoltmeter genau 100mV anzeigt. 3. Nehmen Sie nun den Frequenzgang der Ausgangsspannung auf. Bestimmen Sie die untere sowie obere Grenzfrequenz, die Resonanzfrequenz und berechnen Sie die Güte des Gyrators. 4. Wiederholen Sie die Schritte 2 und 3 für Rg=10KΩ. 5. Vergleichen Sie die Messungen mit den Simulationsergebnissen. Kontrollfrage: Wieso ergibt sich bei Rg=10KΩ eine schlechtere Güte, als bei Rg=1KΩ ? Welche Schlussfolgerung der Gütebeurteilung ergibt sich daraus? 4.5 Der aktive Tiefpass 1. Schließen Sie den NF-Generator an den Eingang Ue an. Wählen Sie eine Ausgangsspannung von Ua=100mV. 2. Messen Sie den Frequenzgang beider Schalterstellungen des Versuchsaufbaus. Welche Schalterstellung entspricht dabei welchen aus Abschnitt 3.5 Aufgabe 2 simulierten Werten. Erklären Sie mögliche Unterschiede. Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 19 Literaturverzeichnis: /1/ U. Tietze, Ch. Schenk: Halbleiter-Schaltungstechnik. Berlin, Heidelberg, New York: Springer 1989, 9. Auflage, S. 316ff /2/ Funke, Liebscher: Grundschaltungen der Elektronik, Berlin, VEB Verlag Technik 1970, 9. Auflage, S. 83ff, S. 93 /3/ U. Tietze, Ch. Schenk: Halbleiter-Schaltungstechnik. Berlin, Heidelberg, New York: Springer 1989, 9. Auflage, S. 332ff /4/ U. Tietze, Ch. Schenk: Halbleiter-Schaltungstechnik. Berlin, Heidelberg, New York: Springer 1989, 9. Auflage, S. 866ff /5/ U. Tietze, Ch. Schenk: Halbleiter-Schaltungstechnik. Berlin, Heidelberg, New York: Springer 1989, 9. Auflage, S. 380ff /6/ M. Herpy: Analoge integrierte Schaltungen, Budapest, München: Franzis Verlag 1976, S. 405ff Anwendungen von OPVs Betreuer: Dr.-Ing. Steffen Arlt, Tel. 1165 Seite : 20