Musterlösung Serie 11 - D-MATH
Werbung

Prof. D. Salamon
Analysis II
MATH, PHYS, CHAB
FS 2015
Musterlösung Serie 11
1. (a) Betrachte die Substitution
φ : A1 → [0, 1]2 ,
φ(x, y) := (ax + by, cx + dy).
und schreibe(u, v)= φ(x, y). Da φ gerade der Multiplikation mit der nicht singulären
a b
Matrix A =
entspricht, ist φ ein Diffeomorphismus und es gilt
c d
a b = |ad − bc|
|det(dφ(x, y))| = det
c d sowie
det(dφ−1 (u, v)) = |ad − bc|−1
Der Transformationssatz liefert nun
Z
Z
1 dxdy =
vol2 (A1 ) =
|ad − bc|−1 dudv = |ad − bc|−1 .
[0,1]2
A1
(b) Betrachte den Diffeomorphismus
φ : A2 → [a, b] × [c, d],
φ(x, y) = (ye−x , yex ).
und schreibe (u, v) = φ(x, y). Man checkt leicht, dass φ in der Tat eine bijektive Abbildung ist und es gilt
−ye−x e−x = 2y.
|det(dφ(x, y))| = det
yex
ex Folglich ist dφ in jedem Punkt des Definitionsbereichs invertierbar und somit ein Diffeomorphismus. Die Ableitung der Umkehrabbildung ist gegeben durch
|det(dφ(u, v))| =
1
1
= √
2y
2 uv
Mit dem Transformationssatz folgt schliesslich
Z
Z
√
√ √
√
1
√ dudv = 2( b − a)( d − c).
vol2 (A2 ) =
1 dxdy =
2
uv
A2
[a,b]×[c,d]
(c) Wir betrachten analog zu Teil (a) die Substitution
φ : A3 → [0, 1] × [0, 4],
(u, v) := φ(x, y) := (x + y, 2x − 3y).
Dann gilt
1
|det(dφ(x, y))| = det
2
1 =5
−3 sowie für die Umkehrabbildung
det(dφ−1 (u, v)) = 1 .
5
Mit dem Transformationssatz folgt nun
√
Z
Z
Z
√
u
4 1√
8
x + y dxdy =
dudv =
u du =
.
5
5
15
A3
[0,1]×[0,4]
0
1
2. Definiere die Menge
Dn := {(y1 , . . . , yn ) ∈ Rn | 0 ≤ y1 ≤ y2 ≤ · · · ≤ yn ≤ 1}
und betrachte den (linearen) Diffeomorphismus
x1
y1
x2
y2
φ : ∆n → Dn ,
y = . := φ . :=
.
.
.
.
.
x1 + · · · + xn
xn
yn
x1
x1 + x2
..
.
Die Ableitung von φ ist gegeben durch die Dreiecksmatrix
1 0 ··· 0
1 1 · · · 0
dφ(x) = . . .
. . ...
.. ..
1 1 ··· 1
Insbesondere gilt | det(dφ(x))| = 1 sowie | det(dφ−1 (y))| = 1.
(a) Mit der Substitution von oben und dem Transformationssatz erhalten wir
Z
Z
n
voln (∆ ) :=
1 dx1 · · · dxn =
1 dy1 · · · dyn
Z
∆n
1 Z yn
yn−1
Z
Dn
y2
Z
···
=
0
0
0
dy1 · · · dyn
0
Um das letzte iterierte Integral zu berechnen verifiziert man leicht mit vollständiger
Induktion über k = 2, . . . , n die Formel
Z yk Z yn−1
Z y2
1
···
dy1 · · · dyk−1 =
y k−1
(k
−
1)! k
0
0
0
und erhält schliesslich mit k = n
n
Z
1
1
1
y n−1 dyn =
(n − 1)! n
n!
voln (∆ ) =
0
(b) Mit der Substitution von oben und dem Transformationssatz erhalten wir
Z
Z
x1 +···+xn
e
dx1 · · · dxn =
eyn dy1 · · · dyn
∆n
Dn
1
Z
eyn
=
0
yn
Z
=
0
y2
···
0
1
Z
Z
dy1 · · · dyn−1 dyn
0
y n−1
dyn
eyn n
(n − 1)!
Wir kürzen den Wert des letzte Integrals mit In ab. Dann gilt offenbar
Z 1
I1 :=
et dt = e − 1
0
und mit partieller Integration folgt die Rekursion
Z 1
Z 1 n−1
tn−1
e
t
e
In =
et
dt =
−
dt =
− In−1
(n − 1)!
(n − 1)!
(n − 1)!
0
0 (n − 2)!
Damit erhalten wir schliesslich
Z
ex1 +···+xn dx1 · · · dxn = In =
∆n
n−2
X
(−1)
k=1
k−1
e
(n − k)!
!
+ (−1)n
wobei wir I2 = e − (e − 1) = 1 noch verwendet haben um den Ausdruck zu vereinfachen.
2
3. Wir bezeichnen mit D ⊂ Rn das Simplex mit den Eckpunkten a0 , . . . , an und betrachten die
Substitution
n
X
φ : ∆n → D,
x = φ(t) =
tk (ak − a0 ).
k=1
Beachte, dass in dieser Formel t = (t1 , . . . , tn ) gilt und somit tk ∈ R Skalare sind, während
die a0 , a1 , . . . , an ∈ Rn Punkte im Rn sind. Die Ableitung von φ an der Stelle t ist gegeben
durch
dφ(t) = (a1 − a0 , a2 − a0 , . . . , an − a0 ).
Das heisst, die i-te Spalte der Jacobi Matrix ist durch den Vektor ai − a0 gegeben. Man sieht
leicht mit den Methoden der linearen Algebra, dass das Simplex D genau dann entartet ist,
d.h. D liegt in einer (n − 1)-dimensionalen affinen Ebene, falls die Matrix dφ(t) singulär ist.
In diesem Fall ist die Gleichung
1
|det(a1 − a0 , a2 − a0 , . . . , an − a0 )|
n!
trivialerweise erfüllt. Andernfalls ist φ ein Diffeomorphismus und der Transformationssatz
liefert
Z
Z
voln (D) =
1 dx1 . . . dxn =
| det(dφ(t))| dt1 · · · dtn
∆n
ZD
|det(a1 − a0 , a2 − a0 , . . . , an − a0 )| dt1 · · · dtn
=
voln (D) = 0 =
∆n
1
|det(a1 − a0 , a2 − a0 , . . . , an − a0 )| .
=
n!
Im letzten Schritt haben wir die Formel voln (∆n ) =
1
n!
verwendet.
4. Wir betrachten die Jacobi-Transformation. Für s, t ∈ R mit 0 ≤ s < t betrachte die Menge
∆2[s,t] := {(x, y) ∈ [0, ∞)2 | s ≤ x + y ≤ t} ⊂ R2+ .
Dann ist die Jacobi-Transformation durch den Diffeomorphismus
x
u
u(1 − v)
J : [s, t] × [0, 1] → ∆2[s,t] ,
:= J
:=
y
v
uv
gegeben. Zusätzlich gilt
(1 − v) −u = u.
|det(dJ(u, v))| = det
v
u (a) Mit der Notation von oben gilt ∆2 = ∆2[0,1] . Die Jacobi-Transformation liefert nun
zusammen mit dem Transformationssatz
Z
Z
Z 1
1
1
1
dxdy
=
u
dudv
=
u1−a du =
.
a
a
2−a
∆2 (x + y)
[0,1]×[0,1] u
0
Das letzte Integral existert genau dann, wenn 1 − a > −1 gilt. Das liefert die Bedingung
a < 2 aus der Aufgabenstellung.
(b) Mit der Notation von oben gilt R2+ \∆2 = ∆2[1,∞] . Streng genommen, ist das Integral über
diesen Bereich definiert als der Grenzwert der Integrale über die kompakten Teilmengen
∆2[1,t] mit t → ∞ und wir werden das im Folgenden etwas pedantisch berücksichtigen.
Die Jacobi-Transformation liefert dann zusammen mit dem Transformationssatz
Z
Z
Z
1
1
1
dxdy = lim
dxdy = lim
u dudv
a
a
a
t→∞
t→∞
2
(x
+
y)
(x
+
y)
u
R+ \∆2
∆[1,t]
[1,t]×[0,1]
Z t
Z ∞
1
1−a
= lim
u
du =
u1−a du =
t→∞ 1
a
−
2
1
Das letzte Integral existiert genau dann, wenn 1 − a < −1 gilt, und das liefert die
Bedingung a > 2.
3
5. (a) Wir benutzen zunächst die Transformation
1
1
1
(x, y, z) := T (ξ, η, ζ) := aξ α , bη β , cζ γ
T : ∆3 → ∆α,β,γ
a,b,c ,
mit
a 1 −1
α
αξ
0
|det(dT (ξ, η, ζ))| = det
0
0
1
−1
b β
βη
0
abc 1 −1 β1 −1 γ1 −1
ξα η
ζ
.
=
αβγ
1
c γ −1 ζ
0
0
γ
Der Transformationssatz liefert dann
Z
xp−1 y q−1 z r−1 dxdydz
∆α,β,γ
a,b,c
Z
=
∆3
abc
αβγ
=
p
α,
Wir kürzen p̃ =
p−1 1
aξ α
Z
1
bη β
q−1 q
p
1
cζ γ
1−r abc 1
1
1
ξ α −1 η β −1 ζ γ −1 dξdηdζ
αβγ
r
ξ α −1 η β −1 ζ γ −1 dξdηdζ.
∆3
q
β
q̃ =
Z
und r̃ =
r
γ
ab. Dann müssen wir die Identität
ξ p̃−1 η q̃−1 ζ r̃−1 dξdηdζ =
∆3
Γ(p̃)Γ(q̃)Γ(r̃)
Γ(p̃ + q̃ + r̃ + 1)
(1)
zeigen. Dafür benutzen wir die Jacobi-Transformation. Für 0 ≤ s < t benutzen wir
analog zu Aufgabe 4 die Notation
∆3[s,t] := {(ξ, η, ζ) ∈ [0, ∞)3 | s ≤ ξ + η + ζ ≤ t} ⊂ R3+ .
Dann ist die Jacobi-Transformation gegeben durch
u(1 − v)(1 − w)
u
ξ
η := J3 v := uv(1 − w)
J3 : [s, t] × [0, 1] × [0, 1] → ∆3[s,t] ,
uw
w
ζ
mit
(1 − v)(1 − w) −u(1 − w) −u(1 − v) u(1 − w)
−uv
| det(J3 (u, v, w))| = det v(1 − w)
w
0
u
(1 − w) (1 − v) 2
det (1 − v) −u (1 − w)2
u
+
u
= w det
v
u −(1 − w)
v
= w(1 − w)u2 + u2 (1 − w)2 = u2 (1 − w).
Dabei haben wir die Determinante der 3×3 Matrix entlang der unteren Zeile entwickelt.
Mit [s, t] = [0, 1] können wir die linke Seite von (1) nun transformieren und erhalten
Z
ξ p̃−1 η q̃−1 ζ r̃−1 dξdηdζ
∆3
Z
p̃−1
q̃−1
=
[(u(1 − v)(1 − w)]
[uv(1 − w)]
(uw)r̃−1 u2 (1 − w) dudvdw
[0,1]3
1
Z
=
Z
up̃+q̃+r̃−1 du
0
0
=
1
p̃ + q̃ + r̃
Z
0
1
Z
1
Z
1
(1 − v)p̃−1 v q̃−1 (1 − w)p̃+q̃−1 wr̃−1 dvdw
0
1
(1 − v)p̃−1 v q̃−1 (1 − w)p̃+q̃−1 wr̃−1 dvdw
0
4
Das letzte Integral können wir mit folgenen Trick ausrechnen: Wir benutzen dabei die
Jacobi-Transformation mit [s, t] = [0, ∞].
Z ∞
Z ∞
Z ∞
p̃−1 −ξ
q̃−1 −η
r̃−1 −ζ
ξ
η
ξ
Γ(p̃)Γ(q̃)Γ(r̃) =
e dξ
e dη
e dζ
0
0
Z 0
=
ξ p̃−1 η q̃−1 ζ r̃−1 e−ξ−η−ζ dξdηdζ
R3+
Z
∞
Z
1
Z
1
p̃−1
q̃−1
[(u(1 − v)(1 − w)]
[uv(1 − w)]
(uw)r̃−1 e−u u2 (1 − w) dudvdw
0
0
0
Z ∞
Z 1Z 1
p̃+q̃+r̃−1 −u
(1 − v)p̃−1 v q̃−1 (1 − w)p̃+q̃−1 wr̃−1 dvdw
u
=
e du
=
0
0
Z
1
0
1
Z
(1 − v)p̃−1 v q̃−1 (1 − w)p̃+q̃−1 wr̃−1 dvdw
= Γ(p̃ + q̃ + r̃)
0
0
Damit folgt
Z
0
1
Z
1
(1 − v)p̃−1 v q̃−1 (1 − w)p̃+q̃−1 wr̃−1 dvdw =
0
Γ(p̃)Γ(q̃)Γ(r̃)
.
Γ(p̃ + q̃ + r̃)
Wir erhalten schliesslich
Z
ξ p̃−1 η q̃−1 ζ r̃−1 dξdηdζ =
Z 1Z 1
1
(1 − v)p̃−1 v q̃−1 (1 − w)p̃+q̃−1 wr̃−1 dvdw
p̃ + q̃ + r̃ 0 0
Γ(p̃)Γ(q̃)Γ(r̃)
1
·
=
p̃ + q̃ + r̃ Γ(p̃ + q̃ + r̃)
Γ(p̃)Γ(q̃)Γ(r̃)
.
=
Γ(p̃ + q̃ + r̃ + 1)
∆3
Im letzen Schritt haben wir die Beziehung xΓ(x) = Γ(x + 1) benutzt. Das liefert (1)
und beweist die verallgemeinerte Dirichlet-Formel.
√
(b) Wir zeigen zunächst, dass Γ( 12 ) = π gilt. Mit der Substitution t = x2 erhalten wir
Z ∞
Z ∞
2
1
− 21 −t
Γ
=
t e dt =
e−x dx.
2
0
0
Indem wir in Polarkoordinaten substituieren erhalten wir
2 Z ∞
Z ∞
Z
2
2
2
2
1
=
Γ
e−x dx
e−y dy =
e−x −y dxdy
2
2
0
0
R
Z ∞ Z 2π
Z ∞
2
2
=
e−r r drdφ = π
2rer dr = π.
0
0
Damit folgt die Formel Γ( 21 ) =
0
√
π.
i. Mit der Formel aus Teil (a) mit p = q = r = 1 erhalten wir für das Volumen
Z
vol3 (K) =
1 dxdydz =
K
abc
abc Γ( 21 )3
=
·
π.
8
6
Γ( 25 )
Im letzten Schritt haben wir noch die Rekursion Γ( 52 ) = 32 Γ( 32 ) = 34 Γ( 21 ) verwendet.
ii. Mit der Formel aus Teil (a) mit p = 2 und q = r = 1 und den Funktionswerte
Γ(1) = 1, Γ(3) = 2! = 2 erhalten wir
2
a2 bc Γ 12
a2 bc
x dxdydz =
·
=
π.
8
Γ(3)
16
K
Z
5
Die anderen Integrale bestimmt man analog und erhält für den Schwerpunkt
Z
a
x
a
1
abc
6
3
y dxdydz =
S=
·
π b = b
vol3 (K) K
abcπ 16
8
c
z
c
iii. Sei p = (x, y, z). Die Komponente von p parallel zu g ist gegeben durch hp, viv.
Folglich ist der Abstand von p zu der Geraden g gegeben durch die Länge des
Vektors p − hp, viv und wir erhalten
d2g (x, y, z) = ||p − hp, viv||2 = ||p||2 − 2hp, hp, vivi + |hp, vi|2 ||v||2 = ||p||2 − |hp, vi|2
= x2 + y 2 + z 2 − (xv1 + yv2 + zv3 )2
= (1 − v12 )x2 + (1 − v22 )y 2 + (1 − v3 )2 z 2 − 2v1 v2 xy − 2v1 v3 xz − 2v2 v3 yz
Jeden Summanden können wir leicht mit der Formel aus Teil (a) berechnen. Es gilt
zum Beispiel
Z
a3 bc
a3 bc Γ( 32 )Γ( 12 )2
=
·
π
x2 dxdydz =
8
30
Γ( 72 )
K
3
wenn man die Rekursion Γ( 72 ) = 52 Γ( 52 ) = 15
4 Γ( 2 ) berücksichtig. Ebenso berechnet
man
Z
a2 b2 c
a2 b2 c Γ( 12 )
· 7 =
π.
xy dxdydz =
8
15
Γ( 2 )
K
Insgesammt erhält man schliesslich
Θg (K) =
abcπ
(1 − v12 )a2 + (1 − v22 )b2 + (1 − v32 )c2
30
2abc
−
(v1 v2 ab + v1 v3 ac + v2 v3 bc)
15
6. Wie wiederholen knapp einige grundlegende Dinge aus der Geometrie der komplexen Zahlenebene. Die Abbildungen φ : H → H der Form
φ(z) =
az + bz
,
cz + d
a, b, c, d ∈ R,
ad − bc = 1
heissen Möbiustransformationen und sind Diffeomorphismen der oberen Halbebene. Jede
Möbiustransformation kann als Verkettung von affinen Abbildungen sowie der Inversionsabbildung I(z) := −z −1 geschrieben werden. Die Abbildung φ verändert sich nicht, wenn
wir bei allen Koeffizienten a, b, c, d die Vorzeichen ändern und wir können c ≤ 0 annehmen.
Dann ist die Zerlegung von φ gegeben durch φ = φ2 ◦ I ◦ φ1 mit
a
ad
−1
φ1 (z) = −cz − d,
I(z) = −z ,
φ2 (z) = b −
z+ .
c
c
Wir haben in Analysis I, Serie 4, Aufgabe 4 das Verhalten von Geraden und Kreisen unter
der Inversionsabbildung diskutiert. Insbesondere bildet die Inversionsabbildung hyperbolische Geraden auf hyperbolische Geraden ab. Die gleiche Aussage ist für affine Abbildungen
offensichtlich und somit bilden auch Möbiustransformationen hyperbolische Geraden auf
hyperbolische Geraden ab. Des weiteren kann man leicht verifizieren, dass für je zwei hyperbolische Geraden mindestens eine Möbiustransformation existiert, welche die eine in die
andere überführt.
Da φ eine komplex differenzierbare Abbildung ist, entspricht ist die Ableitung dφ(z) der
Multiplikation mit einer komplexen Zahl. Geometrisch ist dφ(z) dann eine Drehstreckung
und erhält Winkel. Es folgt also ganz allgemein aus der Theorie der komplex differenzierbaren
Funktionen, dass Möbiustransformationen Winkel erhalten.
6
Ziel dieser Aufgabe ist es für ein hyperbolisches Dreieck ∆ mit Innenwinkeln α, β, γ die
Formel
µh (∆) = π − α − β − γ
zu zeigen. Sei nun φ eine Möbiustransformation. Aus unserer Diskussion von oben folgt, dass
die Bildmenge φ(∆) wieder ein hyperbolisches Dreieck ist und die gleichen Innenwinkel wie ∆
besitzt. Somit ist die rechte Seite dieser Gleichung invariant unter Möbiustransformationen.
Wir zeigen in Teil (a), dass die linke Seite für beliebige Jordan-messbare Mengen ebenfalls
invariant ist unter Möbiustransformationen.
(a) Es genügt zu zeigen, dass affine Abbildungen und die Inversionsabbildung den Flächeninhalt invariant lassen. Sei zunächst
φ : H → H,
φ(z) = az + b,
mit a, b ∈ R und a > 0
eine affine Abbildung von H. In reellen Koordinaten ist φ der Diffeomorphismus
φ : R × (0, ∞) → R × (0, ∞),
φ(x, y) = (ax + b, ay).
und es gilt
a
| det(dφ(x, y))| = det
0
0 = a2 .
a Mit der Notation (u, v) = φ(x, y) liefert der Transformationssatz
Z
Z
Z
1
1
1
2
dudv
=
a
dxdy
=
dxdy = µh (A)
µh (φ(A)) =
2
2
2
v
(ay)
y
A
A
φ(A)
Die Inversionsabbildung I(z) = −z −1 = − |z|z̄ 2 ist in reellen Koordinaten gegeben durch
I : R × (0, ∞) → R × (0, ∞),
I(x, y) =
−x
y
, 2
2
2
x + y x + y2
.
Es gilt
2 2
−x −y +2x2
(x2 +y2 )2
| det(dI(x, y)) = det
−2xy
(x2 +y 2 )2
=
1
(x2 − y 2 )2 + 4x2 y 2
= 2
2 )4
2
2
2
(x
+
y
x +y −2y
(x2 +y 2 )2
2xy
(x2 +y 2 )2
1
(x2 + y 2 )2
Mit der Notation (u, v) := I(x, y) liefert der Transformationssatz
Z
µh (I(A)) =
I(A)
1
dudv =
v2
Z A
y
x2 + y 2
−2
1
dxdy =
(x2 + y 2 )2
Z
A
1
dxdy = µh (A)
y2
(b) Da die Innenwinkel und der Flächeninhalt eines hyperbolischen Dreiecks nach Teil (a)
beide invariant unter Möbiustransformationen sind, können wir annehmen, dass eine
Seite des Dreiecks eine senkrechte Gerade ist.
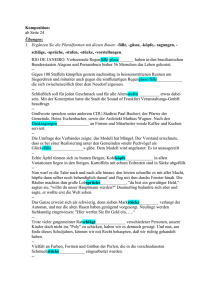
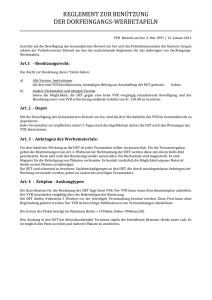
Wir können also die Situation aus Abbildung 1 annehmen. Wir bezeichnen mit ∆(ABC)
das Dreieck mit den Ecken A, B, C und mit ∆(EB∞) das entartete Dreieck mit einer
Ecke im Unendlichen und den beiden anderen Ecken E und B. Mit dieser Notation gilt
∆(EB∞) ∪ ∆(ABC) ∪ ∆(F A∞) = ∆(EC∞) ∪ ∆(F C∞)
und die Vereinigungen sind disjunkt bis auf die Seiten der Dreiecke. Wir bezeichnen
der Einfachheit halber mit |∆| den hyperbolischen Flächeninhalt des Dreiecks |∆|, dann
folgt:
|∆(ABC)| = |∆(EC∞)| + |∆(F C∞)| − |∆(EB∞)| − |∆(F A∞)|
7
A
C
α
γ
θ
β
B
F
E
Abbildung 1: Allgemeines hyperbolisches Dreieck
Auf der rechten Seite sind alle Dreiecke entartet mit einer Ecke im Unendlichen und
einer Ecke auf der reellen Achse. In diesen Dreiecken sind die Innenwinkel bei der Ecke
auf der reellen Achse und im Unendlichen jeweils 0. Die verbleibenden Innenwinkel
in den Dreiecken ∆(EB∞) und ∆(F A∞) sind gegeben durch π − β und π − α. Den
verbleibenden Winkel in dem Dreieck ∆(F C∞) können wir nicht direkt angeben und
definieren ihn als θ. Dann ist der verbleibende Winkel in dem Dreieck ∆(EC∞) durch
γ +(π −θ) gegeben. Wenn wir nun die Flächenformel für entwartete Dreiecke annehmen
erhalten wir:
|∆(ABC)| = |∆(EC∞)| + |∆(F C∞)| − |∆(EB∞)| − |∆(F A∞)|
= θ − γ + π − θ − β − α = π − (α + β + γ)
Das liefert die allgemeine Flächenformel.
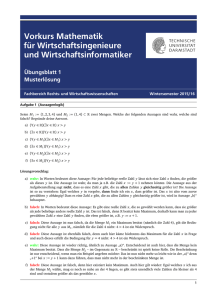
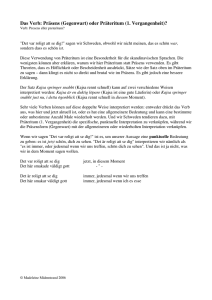
Es verbleibt die Flächenformel für entartete Dreiecke zu zeigen. Wir betrachten dabei
die Situation in der Abbildung 2 unten. Da der Radius senkrecht auf dem Kreisbogen
steht, kann man sich leicht überlegen, dass er mit der reellen Achsen ebenfalls den
Winkel β einschliesst. Also gilt b = r + r cos(β). Mit Fubini erhalten wir dann
Z
1
µh (∆) =
dxdx
2
∆ y
Z r+r cos(β) Z ∞
1
=
dydx
√2
2
y
2
0
r −(r−x)
Z r+r cos(β)
1
p
=
dx
2 − (r − x)2
r
0
Z r+r cos(β)
1
1
q
=
· dx
r−x
2
0
1−( r ) r
Mit der Substitution u = r−x
r erhalten wir:
Z 1
1
√
µh (∆) =
du = arcsin(1) − arcsin(− cos(β))
1 − u2
− cos(β)
π
π
= + arcsin sin
−β
=π−β
2
2
8
∆
β
r
0
β
r
b
Abbildung 2: Allgemeines hyperbolisches Dreieck
Das beweist die Flächenformel für entartete Dreiecke.
9