Lösung
Werbung

Studienjahr FS 2015
ETH Zürich
D-MATH/D-PHYS
Prof. K. Kirch
Klausur, 11. August 2015, Physik II
Musterlösung
1 Multiple Choice (8 Punkte)
(1.2) = c)
Leiter insgesamt neutral; Feld wird mit Abstand schwächer, deswegen bewegen sich
weniger Ladungsträger.
(1.3) = d)
Nach langer Zeit ist die Kapazität voll aufgeladen, deswegen fliesst kein Strom mehr
durch diesen Ast (d.h. Q̇ = IC = 0). Nach langer Zeit ist der Strom konstant,
deswegen gibt es keinen Potentialabfall (= LI˙ = 0) über die Spule. Deswegen fliesst
über den mittleren Ast mehr Strom als über den dritten.
(1.4) = b)
E Feld zeigt vom grossen zum kleinen Potential. Je dichter die Äquiotentiallinien
sind, desto stärker ist das E-Feld.
(1.5) = a)
(1.6) = d)
Die Lenz’sche Regel sagt, dass V proportional I˙ ist. D.h. wenn I = const, muss V = 0
sein, wenn I linear zunimmt (abnimmt), muss V = const > 0 (< 0) sein.
(1.7) = d)
Potential ist eine Integration über das E-Feld, und E-Feld im Dielektrikum ist kleiner
wegen Polarisationsladung.
(1.8) = d)
Die Lorentzkraft ist F = qv × B = q|v||B| sin θ. Für θ = 0 oder 180 Grad F = 0, für
θ = 90 Grad F maximal.
(1.9) = a)
divB = 0 (keine magnetischen Quellen). Siehe Micro-Teaching.
2 Schiff und Satellit (9 Punkte)
a) (2 Punkte) Die Amplitude der harmonischen stehenden Wasserwelle ist gegeben
durch
ξ(x, t) = A0 cos(kx) cos(ωt),
(1)
wobei die Wellenzahl
k=
1
2π
λWasser
(2)
und die Kreisfrequenz
vWasser
(3)
λWasser
sind. Da der Schiff sich an einem Wellenbauch befindet, ist seine Position als Funktion
der Zeit:
ξBauch (t) = A0 cos(ωt).
(4)
ω = 2πν = 2π
b) (1.5 Punkte) Der Sender bewegt sich harmonisch in vertikaler Richtung, d.h. hin
und zurück relativ zum Satellit. Somit haben wir hier mit dem Doppler Effekt mit
ruhendem Beobachter und sich bewegender Quelle zu tun: die empfangene Frequenz
ist verschoben je nachdem ob der Schiff vom Satellit sich entfernt oder sich zu ihm
annähert. Die maximale Frequenz wird erreicht für die Radiowelle, die vom Schiff
ausgestrahlt wurde als er bei ξBauch = 0 war und sich nach oben bewegte.
c) (3 Punkte) Zuerst berechnen wir die vertikale Geschwindigkeit des Schiffes:
vSchiff = ξ˙Bauch (t) = −ωA0 sin(ωt).
(5)
max = ωA , als der Schiff durch
Die maximale Geschwindigkeit ist deswegen vSchiff
0
ξBauch = 0 geht. Im Referenzsystem des Schiffes ist die Frequenz der Radiowelle
gegeben durch νradio = c/λradio , wobei c die Lichtgeschwindigkeit ist. Nach dem
Dopplereffekt finden wir dass die vom Satellit maximale beobachtete Frequenz ist
max
=
νSatellit
νradio
1−
max
vSchiff
c
c/λradio
c/λradio
=
.
ωA0
Wasser A0
1− c
1 − 2πv
λWasser c
=
(6)
d) (2.5 Punkte) Die mittlere Energieflussdichte (Intensität) beim Satellit ist
I=
P
.
4πz02
(7)
Für eine elektromagnetische Welle ist die mittlere Energieflussdichte mit dem Poyntingvektor
~= 1E
~ ×B
~
S
(8)
µ0
verknüpft (siehe Serie 11, Aufgabe 3b)):
~ =
I = h|S|i
1 E02
,
2 cµ0
wobei E0 die Amplitude des elektrischen Feldes ist. Auflösung nach E0 gibt:
s
P cµ0
E0 =
.
2πz02
(9)
(10)
3 Kosmische Strahlung (8.5 Punkte)
a) (4 Punkte) Seien p0p , p0γ und p0∆ die Viererimpulse von Proton, Photon und ∆Teilchen im Bezugssystem Σ0 :
p0p = (Ep0 /c, p~ 0p ),
(11)
p0γ
p0∆
(12)
=
(Eγ0 /c, p~ 0γ ),
= (m∆ c, ~0),
2
(13)
mit Ep0 und p~ 0p die Energie und der Dreierimpuls des Protons, Eγ0 und p~ 0γ die Energie
und der Dreierimpuls des Photons und c die Lichtgeschwindigkeit. Im Bezugssystem
Σ0 ist das ∆-Teilchen in Ruhe, d.h. dieses System ist das Schwerpunktsystem des
Prozesses. Die Energie- und Impulserhaltung liefert
p0p + p0γ = p0∆
(14)
p0γ = p0∆ − p0p .
(15)
und folglich
Wir können das Vierer-Betragsquadrat davon bilden,
(p0γ )2 = (p0∆ − p0p )2 ,
(16)
(p0γ )2 = (p0∆ )2 + (p0p )2 − 2(p0∆ · p0p ),
(17)
das heisst
wobei das Skalarprodukt links als Vierer-Skalarprodukt (p1 · p2 ) = (E1 /c)(E2 /c) −
p~1 · p~2 gemeint ist. Aus der Relation (p0i )2 = (Ei0 /c)2 − |~
p 0i |2 = m2i c2 , für alle Teilchen
(i = p, γ, ∆), und mit den obigen Viererimpulsen finden wir
Ep0
2 2
2 2
0 = m∆ c + mp c − 2 m∆ c ·
−0 .
(18)
c
Die Auflösung nach Ep0 liefert das gewünschte Ergebnis:
Ep0
m2p
m∆ +
m∆
1
1
=
m2∆ c2 + m2p c2 =
2m∆
2
!
c2 .
(19)
b) (2 Punkte) Die Energieerhaltung im Bezugssystem Σ0 lautet
Ep0 + Eγ0 = m∆ c2 .
(20)
Die Auflösung nach Eγ0 liefert
Eγ0 = m∆ c2 − Ep0
1
2
= m∆ c2 −
1
=
2
(21)
m∆ +
m2p
m∆ −
m∆
m2p
m∆
!
c2
(22)
!
c2 .
(23)
c) (2.5 Punkte) Die Geschwindigkeit v des ∆-Teilchens im Bezugssystem Σ ist die
Geschwindigkeit des Bezugssystems Σ0 relativ zum Bezugssystem Σ. Wir können
diese Geschwindigkeit aus dem (longitudinalen) relativistischen Dopplereffekt des
Lichts ermitteln, indem wir beachten dass Energie und Frequenz eines Photons durch
E = hν verknüpft sind. Dabei müssen wir noch berücksichtigen dass das Photon in
Σ0 rückwärts läuft:
s
Eγ0
1+β
hν 0
ν0
=
=
=
,
(24)
Eγ
hν
ν
1−β
mit ν (bzw. ν 0 ) die Frequenz im Bezugssystem Σ (bzw. Σ0 ) und β = v/c. Umgeformt,
(1 − β)
Eγ0
Eγ
3
2
=1+β
(25)
und nach β aufgelöst:
β=
Eγ0
Eγ
2
Eγ0
Eγ
2
=1− −1
(26)
+1
Eγ0
2
2
Eγ
.
(27)
+1
Setzen wir noch das Ergebnis aus Teilaufgabe b) für Eγ0 ein, bekommen wir
2c
v =c−
m2
m∆ − m p
∆
1
2
.
!2
c2
Eγ
(28)
+1
4 Zwei parallele Leiter (9.5 Punkte)
a) (2.5 Punkte) Wir betrachten zuerst einen einzelnen Leiter, der die lineare Ladungsdichte λ = Q/` > 0 trägt. Wir suchen das elektrische Feld ausserhalb des Leiters im
Gebiet um den Leitermittelpunkt, d.h. weit entfernt von den Leiterenden. Aus Symmetriegründen und aus r0 `, in diesem Gebiet zeigt das elektrische Feld radial
von der Leiteroberfläche weg und hängt nur vom Abstand vom Leiter ab. Mit dem
Gauss’schen Gesetz, an einem konzentrischen Zylinder mit Radius r > r0 und Länge
L ` angewandt,
Z
Qinnen
λL !
~ = E · 2πrL,
~ · ds
=
=
E
(29)
ε0
ε0
∂Z
können wir das gesuchte elektrische Feld ausserhalb des Leiters berechnen:
E1Leiter (r) =
Q
λ
=
.
2πε0 r
2πε0 Lr
(30)
Wir betrachten nun die zwei parallele Leiter. Wegen r0 a beeinflüssen sich die
Ladungen auf den beiden Leitern nur sehr wenig. Wir können deshalb das gesamte
elektrische Feld als Superposition der Felder von zwei einzelnen Leitern schreiben.
Auf der x-Achse sind diese elektrische Felder in x-Richtung und aus der Superposition
bekommen wir:
+Q
−Q
Q
1
1
E(x) =
+
=
+
,
(31)
2πε0 Lx 2πε0 L(x − a)
2πε0 L x a − x
wobei E > 0 einem in positiver x-Richtung zeigenden Feld entspricht.
4
b) (2.5 Punkte) Die Spannung zwischen den Leitern ist
Z a−r0
Z a−r0 Q
1
1
E(x)dx =
V =
dx
(32)
+
2πε0 L r0
x a−x
r0
a−r0
Q =
ln(x) − ln(a − x) (33)
2πε0 L
r0
Q =
ln(a − r0 ) − ln(r0 ) − ln(a − a + r0 ) + ln(a − r0 )
2πε0 L
(34)
Q
a − r0
=
(35)
ln
πε0 L
r0
Q
a
≈
,
(36)
ln
πε0 L
r0
wobei wir in Gleichung (36) r0 a verwendet haben. Die Kapazität des Systems ist
folglich
Q
πε0 L
πε L
= 0 .
C=
= Q·
(37)
V
Q ln a
ln a
r0
r0
c) (1 Punkt)Die im Leitersystem gespeicherte Energie ist gegeben durch
1 Q2
1 Q2
a
1
2
=
ln
.
U = CV =
2
2 C
2 πε0 L
r0
(38)
d) (2 Punkte) Die elektrostatische Energie in Gleichung (38), als Funktion von a betrachtet, beschreibt die Arbeit dW die angewendet werden muss um die Position des
zweiten Leiters um einen infinitesimalen Betrag da zu ändern:
dW = dU = U (a + da) − U (a).
(39)
Andererseits ist diese Arbeit mit der angewendeten Kraft Fext verknüpft:
dW = Fext · da.
(40)
Während dieses Prozesses ist Fext stets gleich und entgegengesetzt zur elektrischen
Anziehungskraft Fel . Es folgt:
dU
da d 1 Q2
a
=−
ln
da 2 πε0 L
r0
1 Q2 1
=−
,
2 πε0 L a
Fel = −Fext = −
(41)
(42)
(43)
wobei das “−” Zeichen einfach betont, dass die elektrische Kraft anziehend ist.
e) (1.5 Punkte) Die Kraft zwischen den Leitern ist anziehend mit Betrag
Fel = | − Q · E1Leiter (a)| = Q ·
Q
Q2
=
,
2πε0 La
2πε0 La
d.h. genau dasselbe Ergebnis wie in Teilaufgabe d).
5
(44)
5 Spielt die Form keine Rolle? (8 Punkte)
a) (4 Punkte) Sei F eine geschlossene Fläche, die die positiv geladene Elektrode vollständig umschliesst. Der Strom I aus dieser Elektrode kann als Fluss der Stromdichte
~j durch die Fläche F geschrieben werden:
Z
~
~j · ds.
I=
(45)
F
~ kriegen wir
Mit dem (mikroskopischen) Ohm’schen Gesetz, ~j = σ E,
Z
Z
~ =σ
~
~ · ds.
~j · ds
I=
E
F
(46)
F
Rechts erkennen wir nun den Fluss vom elektrischen Feld durch die Fläche F und
mit Hilfe des Gauss’schen Gesetzes,
Z
~ = Q,
~ · ds
(47)
E
ε0
F
können wir schreiben
Z
I=
~ =σ
~j · ds
F
Z
F
~ = σQ ,
~ · ds
E
ε0
(48)
wobei Q die Ladung auf der Elektrode ist. Diese Ladung ist durch Q = CV mit der
Potentialdifferenz V zwischen den Elektroden verknüpft und so:
Z
Z
~
~ = σQ = σCV .
~ · ds
~
j · ds = σ
E
(49)
I=
ε0
ε0
F
F
Der Widerstand zwischen den Elektroden ist folglich
R=
V
ε0
=
,
I
σC
(50)
wie zu beweisen war.
b) (1 Punkt)Der Widerstand in Gleichung (50) hängt doch von der Form und von der
Geometrie des Systems ab, die ganze Information darüber ist aber in der Kapazität
C kodiert. Die Kapazität hängt tatsächlich von der Geometrie und vom Material ab.
c) (3 Punkte) Sei Q(t) die Ladung zur Zeit t auf der positiv geladenen Elektrode. Sie
ist durch
dQ
I=−
(51)
dt
mit dem Strom zwischen den Elektroden verknüpft. Andererseits, wir wissen aus
Teilaufgabe a), Gleichung (48), dass I = σQ/ε0 . Es folgt die Differentialgleichung für
die Ladung Q:
dQ
σ
= − Q.
(52)
dt
ε0
Die Lösung davon ist
Q(t) = Ae−t/τ ,
(53)
mit einer Konstante A und mit
ε0
.
(54)
σ
Wir haben gefunden dass die Elektroden sich mit der Zeit exponentiell entladen. Die
Konstante A ist durch die Anfangsbedingung Q(t = 0) = Q0 bestimmt. Folglich
A = Q0 und das Endresultat lautet
τ=
Q(t) = Q0 e−t/τ .
6
(55)
6 Elektromagnetischer Generator (9 Punkte)
a) (2.5 Punkte) Der magnetische Fluss durch eine Schleife ist gegeben durch
Φ = BF cos ωt,
(56)
wobei (o.B.d.A.) angenommen wurde dass zur Zeit t = 0 die Fläche der Spule senkrecht zum Magnetfeld steht. Die gesamte induzierte Spannung in den N Windungen
ist dann
dΦ
d
Vind = −N
= −N BF cos ωt = N BF ω sin ωt.
(57)
dt
dt
Es ist eine Wechselspannung, mit Kreisfrequenz ω und Maximalwert N BF ω.
b) (2.5 Punkte) Der Strom durch das Gerät mit Widerstand R ist
I=
N BF ω
Vind
=
sin ωt.
R
R
(58)
Die momentane dissipierte Leistung ist folglich:
P = IV =
N 2B 2F 2ω2
sin2 ωt.
R
(59)
Die zeitliche Mittelung über eine Periode T = 2π/ω liefert:
Z
1 T
P (t)dt
T 0
Z
N 2B 2F 2ω2 1 T
=
sin2 ωtdt
R
T 0
{z
}
|
hP i =
(60)
(61)
1/2
=
N 2B 2F 2ω2
2R
.
(62)
c) (2 Punkte) Das magnetische Moment µ
~ steht senkrecht zur Ebene der Spule und
sein Betrag ist
N 2 BF 2 ω
|~
µ| = N IF =
sin ωt.
(63)
R
Das Drehmoment ist gegeben durch
~
~τ = µ
~ × B,
(64)
d.h., nach der rechten-Hand-Regel, ist es stets parallel zur Drehachse und sein Betrag
ist
N 2B2F 2ω
~ = |~
|~τ | = |~
µ × B|
µ|B sin ωt =
sin2 ωt,
(65)
R
wobei wir wieder angenommen haben dass zur Zeit t = 0 die Fläche der Spule
senkrecht zum Magnetfeld steht.
d) (2 Punkte) Das obige Drehmoment muss von der Turbine mit einem gleich grossen
und entgegengesetzten Drehmoment kompensiert werden, um die Winkelgeschwindigkeit konstant zu erhalten. Die mechanische Arbeit, die geleistet werden muss um
die Spule um den infinitesimalen Winkel dϕ zu drehen, ist
dW = |~τ |dϕ.
7
(66)
Daraus folgt die mechanische Leistung
Pmech =
dW
dϕ
N 2B 2F 2ω2
= |~τ |
= |~τ |ω =
sin2 ωt.
dt
dt
R
(67)
Das ist genau die dissipierte Leistung aus Teilaufgabe b), wie es aufgrund der Energierhaltung sein muss: die mechanische Leistung der Turbine ist gleich zur elektrischen Leistung aus dem Generator, die dann im Widerstand dissipiert wird.
7 Gegenseitige Induktivität (8.5 Punkte)
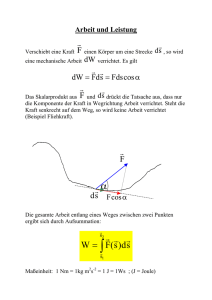
a) (2 Punkte) Die Figur zeigt die gewählte positive Richtungen für die Ströme I1
und I2 . Da die zwei Spulen einen entgegengesetzten Wickelsinn haben, bewirken die
Selbstinduktion und die gegenseitige Induktion denselben Effekt in den Schaltkreisen,
d.h. die entsprechende Terme in den Kirchhoff’schen Maschenregeln haben dasselbe
Vorzeichen:
dI1
dI2
− L12
= 0,
dt
dt
Q2
dI2
dI1
+ L2
+ L12
= 0,
C
dt
dt
V − RI1 − L1
(68)
(69)
mit Q2 die Ladung auf dem Kondensator, die durch I2 = +Q̇2 mit dem Strom I2
verknüpft ist.
b) (5 Punkte) Die zeitliche Ableitung der Maschenregeln liefert:
V̇ − RI˙1 − L1 I¨1 − L12 I¨2 = 0,
(70)
I2
+ L2 I¨2 + L12 I¨1 = 0.
(71)
C
Mit der komplexen
Darstellung V (t) = Re V0 eiωt und mit dem Ansatz Ii (t) =
Re Ii,0 eiωt (für i = 1, 2) finden wir
iωV0 − iωRI1,0 + ω 2 L1 I1,0 + ω 2 L12 I2,0 = 0,
I2,0
− ω 2 L2 I2,0 − ω 2 L12 I1,0 = 0.
C
8
(72)
(73)
Gleichung (73) liefert
I2,0 =
ω 2 L12
I1,0 .
− ω 2 L2
1
C
(74)
In Gleichung (72) eingesetzt,
ω 4 L212
I1,0 = 0,
1
2
C − ω L2
iωV0 − iωRI1,0 + ω 2 L1 I1,0 +
(75)
kriegen wir
I1,0 =
iV0
iR − ωL1 −
(76)
ω 3 L212
1
−ω 2 L2
C
V0
=
R + i ωL1 +
ω 3 L212
1
−ω 2 L2
C
(77)
V0 e−iϕ
=r
2 ,
ω 3 L212
2
R + ωL1 + 1 −ω2 L
(78)
2
C
mit der Phasenverschiebung
ωL1 +
ϕ = arctan
ω 3 L212
1
−ω 2 L2
C
R
.
(79)
Der vom Generator gelieferte Strom ist somit
V0
I1 (t) = Re I1,0 eiωt = r
R2 + ωL1 +
ω 3 L212
1
−ω 2 L2
C
2 cos(ωt − ϕ).
(80)
Berücksichtigen wir noch dass L1 = L2 = L12 ≡ L, so finden wir
V0
I1 (t) = r
R2 + ωL +
ω 3 L2
1
−ω 2 L
C
2 cos(ωt − ϕ)
V0
=s
R2 +
=r
R2 +
1
ωL[ C
−ω 2 L]+ω 3 L2
1
−ω 2 L
C
V0
ωL
1−ω 2 LC
2 cos(ωt − ϕ)
2 cos(ωt − ϕ),
(81)
(82)
(83)
mit der Phasenverschiebung
ϕ = arctan
ωL/R
1 − ω 2 LC
.
(84)
c) (1.5 Punkte) Die momentane Leistung ist gegeben durch
P (t) = I1 (t)V (t) =
9
V02
cos(ωt − ϕ) cos(ωt),
Z
(85)
wobei wir die Impedanz
s
R2
Z=
+
ωL
1 − ω 2 LC
2
(86)
definiert haben.
8 Rotierende Zylindermantel (10.5 Punkte)
a) (2 Punkte) Wir verwenden Zylinderkoordinaten (r, ϕ, z), mit der z-Achse entlang
der Zylinderachse. Der Zylindermantel trägt die Gesamtladung Q = 2πa` · σ. Diese
Ladung rotiert mit Frequenz ν = ω/2π um die Zylinderachse, d.h. der rotierende
Zylindermantel ist äquivalent zu einer Zylinderspule mit Gesamtstrom
“N I ” = Q · ν = a`σω.
(87)
Folglich zeigt das Magnetfeld innerhalb des Zylindermantels in z-Richtung und sein
Betrag hängt nicht von r ab:
B = µ0
NI
= µ0 aσω = µ0 aσkt.
`
(88)
b) (2.5 Punkte) Mit der Maxwell Gleichung
Z
I
d
~
~
~ · ds
~
B
E · d` = −
dt K
∂K
(89)
an einem Kreis von Radius r < a in einer Ebene senkrecht zur z-Achse und konzentrisch mit dem Zylindermantel angewandt, können wir das elektrische Feld bestimmen: es zeigt in (negativer) ϕ-Richtung und sein Betrag hängt nur vom Abstand r
aus der Zylinderachse:
~
|E(r)|2πr
=
d ~
|B(t)|πr2 = µ0 aσkπr2 .
dt
(90)
Folglich:
µ0 aσkr
~
E(r)
=−
êϕ .
2
(91)
c) (3 Punkte) Die gesamte elektrische Energie innerhalb des Zylindersmantels ist das
Volumenintegral
Z
Z ` Z 2π
Z a
1 ~ 2 1
µ0 aσkr 2
UE =
dV ε0 |E| = ε0
dz
dϕ
rdr
(92)
2
2
2
Z
0
0
0
Z
µ0 aσk 2 a 3
1
= ε0 · ` · 2π ·
r dr
(93)
2
2
0
| {z }
a4 /4
πε0 µ20 a6 `σ 2 k 2
,
(94)
16
wobei wir die Integration in Zylinderkoordinaten durchgeführt haben. Die gesamte
magnetische Energie ist, analog,
Z
Z ` Z 2π
Z a
1 ~ 2
1
UB =
dV
|B| =
dz
dϕ
rdr(µ0 aσkt)2
(95)
2µ
2µ
0
0 0
Z
0
0
πµ0 a4 `σ 2 k 2 t2
=
.
(96)
2
=
10
d) (3 Punkte) Das Ampère’sche Gesetz in Differentialform verknüpft das Magnetfeld
mit der Stromdichte:
~ ×B
~ = µ0~j,
∇
(97)
~ = Vr êr +Vϕ êϕ +Vz êz in Zylinderkoordinaten
wobei die Rotation eines Vektorfeldes V
ist
∂Vϕ
1 ∂Vz
∂Vr
1 ∂
∂Vz
∂Vr
~
~
∇×V =
êr +
êϕ +
êz .
(98)
−
−
(rVϕ ) −
r ∂ϕ
∂z
∂z
∂r
r ∂r
∂ϕ
Die Stromdichte innerhalb des Zylinders ist in ϕ-Richtung und gegeben durch
~j = (ρ · v)êϕ = (ρωr)êϕ ,
(99)
wobei v = ωr die Zylindergeschwindigkeit in einem Abstand r von der Achse ist.
Aus Symmetriegründen ist das Magnetfeld in z-Richtung und hängt nur von r ab.
Das Ampére’sche Gesetz in den Gleichungen (97) und (98) hat somit nur eine ϕKomponente und vereinfacht sich zu
−
∂Bz
= µ0 ρωr.
∂r
(100)
Integration liefert
1
(101)
Bz (r) = − µ0 ρωr2 + K,
2
mit einer Konstante K. Ausserhalb des Zylinders verschwindet das Magnetfeld, wie im
Falle einer Zylinderspule. Das Magnetfeld ist bei r = a stetig, weil auf dem Zylindermantel keinen Oberflächenstrom fliesst, d.h. Bz (a) = 0. Mit dieser Randbedingung
können wir die Konstante K bestimmen:
1
!
Bz (a) = − µ0 ρωa2 + K = 0
2
⇒
1
K = µ0 ρωa2 .
2
(102)
Das Magnetfeld im Inneren des Zylinders ist somit:
1
Bz (r) = µ0 ρω(a2 − r2 ).
2
11
(103)