lineare systeme phasen-ebenen fixpunkt-analyse
Werbung

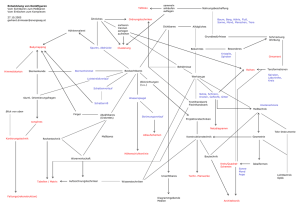
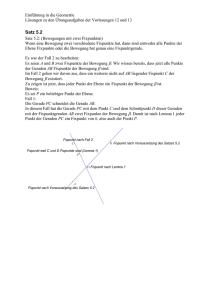
LINEARE SYSTEME PHASEN-EBENEN FIXPUNKT-ANALYSE Proseminar: Theoretische Physik Kerstin Beer – 21.05.2014 – Sommersemester 2014 1 MOTIVATION • Lineares System ist ein Spezialfall • nicht-lineare Systeme sind schwer zu lösen • Techniken der Linearisierung • Fixpunkte qualitativ betrachten und veranschaulichen • Ablesen von Eigenschaften des Systems allein durch MatrixEigenschaften 2 GLIEDERUNG 1. Lineare Systeme 2. Phasen-Ebenen 3. Fixpunkt-Analyse 4. Linearisierung 5. Schlussfolgerungen 3 LINEARE SYSTEME BEISPIEL 1: GLEICHUNGSSYSTEM Population von Hasen Population von Schafen Gekoppeltes Gleichungssystem: 3 Tierarten teilen sich Lebensraum und Nahrung 2 5 2 DEFINITION: LINEARES SYSTEM Zweidimensionales Lineares System ungekoppelte Systeme: 0, Matrix-Schreibweise 0 A 6 DEFINITION: EIGENWERT/-VEKTOR Eigenwertgleichung Eigenvektor Eigenwert λ Charakteristische Gleichung λ 0 λ Bestimmung des Eigenvektors: λ 0 λ 7 BEISPIEL 2: EIGENVEKTOREN 1 4 λ 1 2 2, λ für λ 1 2: 4 für λ 3: 4 4 3 Eigenvektoren: 1 4 1 1 0 1 1 1 4 0 8 LÖSUNG DES LINEAREN SYSTEMS c 1 1 1 4 2 3 mit Anfangsbedingungen 4 9 Lineare Systeme sind sehr einfach zu lösen! BEISPIEL 3: HARMONISCHER OSZILLATOR 0 x k ω m 10 PHASEN-EBENEN DEFINITION: PHASEN-EBENEN zeigen alle Lösungsmöglichkeiten eines Gleichungssystems v 2 z.B. Lösung von ω 0 0 mit 1, 2, 3 und ω 1 0 -3 -2 -1 -1 0.5 12 -2 1 2 3 x BEISPIEL 3: HARMONISCHER OSZILLATOR v v v 0.6 0.4 0.2 0.6 0.4 0.2 - 1.0 - 0.5- 0.2 - 0.4 - 0.6 0.5 x 1.0 - 1.0 - 0.5- 0.2 - 0.4 - 0.6 0.6 0.4 0.2 0.5 x 1.0 - 1.0 - 0.5- 0.2 - 0.4 - 0.6 m m m 13 0.5 x 1.0 PHASENEBENE QUALITATIV ZEICHNEN ω Für größere x werden 0 Vektoren ω länger Für größere v werden Vektoren länger 0 14 GEDÄMPFTER OSZILLATOR v 0.6 0.4 0.2 - 0.5 - 0.2 - 0.4 - 0.6 15 0.5 x 1.0 THEOREM: EXISTENZ UND EINDEUTIGKEIT Anfangsproblem ∂ und , , ∂ 1, … , , 0 sind stetig Lösung für Trajektorie 16 existiert und ist eindeutig FOLGERUNGEN AUS THEOREM Trajektorien überschneiden sich nie Trajektorie bleibt in abgeschlossener Bahn gefangen 17 FIXPUNKT-ANALYSE FIXPUNKTE Fixpunkt 0 Stabiler Fixpunkt Instabiler Fixpunkt 19 BEISPIEL 4: FIXPUNKT-ANALYSE Lineares System 0 0 1 Lösung 20 Plot von 2bis 2 21 Knoten Stern 1 22 1 Linie aus Fixpunkten (nicht-isolierte Fixpunkte) Sattelpunkt 23 ÜBERTRAGUNG: ALLG. LINEARES SYSTEM 0 Δ 0 1 1 1 1 1 0 0 0 2 Δ 2 1 2 0 1 1 0 1 Δ 0 Δ 24 Δ 1 Δ Δund linearer Systeme t 4 instabile Knoten instabile Spiralen 1 -2 -4 λ λ Δ 0 → Eigenwerte: real, versch. 2 Vorzeichen → Sattelpunkte nicht isolierte Fixpunkte 4Δ τ 2 3 4 stabile Spiralen stabile Knoten τ τ τ 2 τ 2 4Δ 4Δ Sterne 5 D Δ 0 → Eigenwerte: entweder real, gleiche Vorzeichen → Knoten oder komplex konj. → Spiralen und geschl. Bahnen LINEARISIERUNG LINEARISIERUNG , mit Fixpunkt , ∗ , Substitution ∗ , ∗ ∗ , ∗ , ∗ dh. f g ∗ , ∗ , ∗ ∗ 0 0 ∗ Taylor‐Entwicklung Jakobi-Matrix , , ∗ , , , , 27 ∗, ∗ BEISPIEL 5: LINEARISIERUNG mit Fixpunkt ∗ , ∗ Jacobi-Matrix ausgewertet am Fixpunkt A 0,0 0 1 1 , 0 um das nichtlineare Problem zu lösen: Polarkoordinaten Θ 1 28 0 WIRKUNG: KLEINE NICHT-LINEARE TERME Spiralen und Sterne können verändert werden, Fixpunkte verändern sich nicht 29 BEISPIEL 1: SCHAFE UND HASEN schwerlösbares, nicht-lineares Gleichungssystem: 3 2 2 Fixpunkte finden: 0, 0,0 ; 0,2 ; 3,0 ; 1,1 Linearisierung, lokal lineares System betrachten: 0 = 30 3 2 2 2 2 2 Jakobi-Matrix an Fixpunkten auswerten FIXPUNKT-ANALYSE 3 0 0 2 →instabiler Knoten 1 0 0,2 : 2 2 →stabiler Knoten 0,0 : 3 0 →stabiler Knoten 1 1,1 : 1 →Sattelpunkt 3,0 : 31 6 1 2 1 Schafe Hasen 32 SCHLUSSFOLGERUNGEN • Lineare Systeme einfach zu lösen • Linearisierung, Vorsicht mit Spiralen! • Bei nicht-linearen Systemen Jacobi-Matrix an Fixpunkten auswerten • Spur/Determinante linearer oder linearisierter System zur Fixpunkt-Analyse nutzen • Phasenebene hilft die Bewegung zu veranschaulichen 33 DANKE FÜR DIE AUFMERKSAMKEIT QUELLEN • Nonlinear Dynamics and Chaos, Ch. 5 – 6, Steven H. Strogatz (1994) • Nonlinear oscillations, dynamical systems and bifurcation of vector fields, J. Guckenheimer and P. Holmes (2002) 35