HllIPS - Philips
Werbung

~HllIPS
RESEARCH
hilips Res. Repts. SuppJ.
Inled In !ho Nclbcrlanlls
LABORATORIES
1974 No. 6
•
.1
,
0-
I
,.
@ N.V. Philips' Gloeilampenfabrieken, Eindhoven, Netherlands, 1974.
Articles or illustrations reproduced, in whole or in part, must be
accompanied by full acknowledgement of the source:
PHILlPS RESEARCH REPORTS SUPPLEMENTS
SCHNELLE
AMPLITUDENREGULUNG
HARMONISCHER OSZILLATOREN*)
BY
D. MEYER-EB RECHT
. *) Thesis, Technische Universität Braunschweig, May 1974.
Promotors: Prof. Dr.-Ing. H. H. Emschermann and Prof. Dr.-Ing. H. Schönfelder.
Philips Res. Repts SuppI. 1974, No. 6 (available in German only).
Abstract
In high-precision harmonic oscillators control loops stabilize the amplitude of oscillation, Analysis of oscillators with conventional amplitude
control results in a fundamental relationship between amplitude response
time and nonlinearity of oscillation. Design rules for optimized conventional controllers are developed. A considerable improvement of the
amplitude response is achieved by use of sampling techniques in the
amplitude controlloop. The response time is reduced from 100 ... 1000
to only It periods of oscillation without any effect on linearity of
oscillation. Super-fast amplitude control has been realized in a highprecision resistance-controlled harmonic oscillator, which converts the
resistance changes ofstrain gauges into frequencies for accurate dynamicforce and weight-measuring application.
INHALT
Seite
EINLEITUNG.
AUFGABENSTELLUNG
1
1. GRUNDLAGEN DER AMPLITUDENREGELUNG
1.1. Der lineare Oszillator, Beschreibungsmodell
1.2. Amplitudenstabilisierung
. . . . . . . • . .
1.2.1. Nichtlineare Amplitudenstabilisierung . .
1.2.2. Amplitudenstabilisierung durch Regelung
1.3. Analyse des linearen Oszillators mit konventioneller Amplitudenregelung. . . . . • . • . . . . . . . . . . . . . . . ..
1.3.1. Einfluf der Regelung auf Linearität und Frequenzkonstanz
1.3.2. Die Regelstrecke "Oszillator"
. . . . . . . .
1.4. Dimensionierung des Regiers . . . . . . . . . . . .
1.4.1. Optimaler Regler für höchste Frequenzstabilität
1.4.1.1. Strecke mit quadratischem Gleichrichter
1.4.1.2. Strecke mit Zweiweggleichrichter
1.4.1.3. Linearisierung der Strecke . . . . . .
1.4.2. Optimaler Regler für höchste Spektralreinheit
.
1.4.2.1. Strecke mit quadratischem Gleichrichter
1.4.2.2. Strecke mit Zweiweggleichrichter
1.4.2.3. Linearisierte Strecke . . . . . . . . .
1.5. Dynamisches Verhalten geregelter Oszillatoren mit schwach nichtlinearer Kennlinie .
1.6. Ergebnis der Analyse . . . . . . • . . . . . . . . . . ..
5
5
9
9
10
31
32
2. SCHNELLE AMPLITUDENREGELUNG
MIT ABTASTVERFAHREN .. '. . . • . . . . . . . . . . . . . . . .
2.1. Amplitudenmessung mit Abtast/Halte-Schaltung . . .
2.2. Regier für Oszillatoren mit Abtast-Amplitudenmessung
2.2.1. Zeitoptimaler Abtastregler . . . . . . .
2.2.1.1. Reglerstrategie . . . . . . . . . . .
2.2.1.2. Fehler aufgrund von Näherungen . . .
2.2.1.3. Aufbau und Dimensionierung des Abtastreglers
2.2.1.4. Ergebnisse der Simulation .. . . . . . . .
2.2.2. Optimaler stetiger Regier . . . . . . . . . . . .•
2.3. Ergebnis der Synthese von Regiem mit Abtastschaltungen .
34
34
35
35
35
40
42
45
47
51
11
12
15
19
19
22
23
25
27
28
28
29
3. REALISIERUNG
EINES OSZILLATORSYSTEMS
MIT ABTASTREGELUNG
. . • . . . . . • • . . . . . . . . . . • . ..
3.1. Anwendung harmonischer
Oszillatoren als MeBgröBenconverter
3.2. Converterkonzept.
. . . . . . . . .
3.3. SteUglieder für Verstärkung und Phase
3.4. Realisierung des OsziUators
. . . . .
3.5. Amplitudenregelung
. . . . . . . .
3.5.1. Berechnung der Reglerdimensionierung
3.5.2. Realisierung des Regiers
3.6. MeBergebnisse am Oszillator .
3.7. Kompensator
. . . . . . .
3.8. Sonstige Elektronik . . . . .
3.9. MeBergebnisse am Converter.
Technische Daten des Converters
Formelzeichen
.
LITERATUR
Die in Kapitel 3 (ausgenommen
Abschnitt 3.3)
ergebnisse wurden mit Mitteln des Bundesministers
logie (Vorhaben DV 5.315) gefördert. Der Minister
logie übernimmt keine Gewähr für die Richtigkeit,
ständigkeit der Angaben sowie für die Beachtung
54
54
55
59
63
65
65
67
69
72
75
76
80
81
84
beschriebenen Forschungsfür Forschung und Technofür Forschung und Technodie Genauigkeit und VoUprivater Rechte Dritter.
-1EINLEITUNG,
AUFGABENSTELLUNG
Die klassischen Anwendungsgebiete elektrischer Oszillatoren sind Nachrichtentechnik und elektrische MeBtechnik. In der Nachrichtentechnik dominiert die Forderung nach stabiler Frequenz, in der MeBtechnik ist oft die
Spektralreinheit der Oszillatorschwingung noch wichtiger. Von den beiden
grundsätzlichen Oszillatorprinzipien - den harmonischen oder linearen Oszillatoren und den Relaxations- oder essentiell nichtlinearen Oszillatoren - sind
mit harmonischen Oszillatoren die Forderungen nach Frequenzstabilität und
Spektralreinheit leichter zu realisieren. Gründe dafür sind, daB sich bei einem
harmonischen Oszillator im Gegensatz zu Relaxationsoszillatoren Gegenkopplungen über alle aktiven Bauelemente einführen lassen und damit der EinfluB
von deren inkonstanten Parametern und nichtlinearem Verhalten weitgehend
eliminieren läBt. Bei Vermeidung von Nichtlinearitäten wird die Frequenz
amplitudenunabhängig, so daf eine Speisespannungsschwankung keinen Frequenzfehler verursacht.
Ein linearer harmonischer Oszillator, der die Schwingbedingung erfüllt, befindet sich in einem indifferenten Gleichgewicht, d.h. er besitzt keine definierte
Schwingamplitude. SolI die Amplitude nicht über eine nichtlineare Kennlinie
stabilisiert werden, dann wird eine Amplitudenregelung notwendig.
Amplitudenregelungen sind unproblematisch, solange Einstellzeiten toleriert
werden können, die einige GröBenordnungen über der Periodenzeit der Oszillatorschwingung liegen. Dieses ist gewöhnlich der Fall bei Hochfrequenzoszillatoren und mit Einschränkungen bei manuell verstimmbaren Niederfrequenzoszillatoren, also bei Oszillatoren für die in Nachrichtentechnik und MeBtechnik
interessierenden Frequenzbereiche. In der Velgangenheit war daher kein AnlaB
gegeben, dem Problem der Amplitudenregelung auf den Grund zu gehen mit
dem Ziel, zu kürzeren Einstellzeiten zu kommen.
In neuerer Zeit wird diese Aufgabe jedoch aus verschiedenen, vor allem meûtechnischen Gründen aktuell:
- Der in der elektrischen Meûtechnik inteiessierende Frequenzbereich hat sich
auch zu tiefen Frequenzen hin erweitert (10 Hz bis herab zu einigen MHz),
so daB auch bei manuell einstellbaren Oszillatoren die Periodenzeit schon in
die GröBenordnung der noch tolerablen Einstellzeit kommt. Eine Ablösung
der in diesem Frequenzgebiet heute üblichen Funktionsgeneratoren ist
wegen deren geringer Spektralieinheit wünschenswert.
- Die Automatisierung in der MeBtechnik verlangt, daB sich Oszillatoren,
gesteuert durch Rechner oder Programmgeber, wesentlich schneller als bei
manuellem Betrieb einstellen lassen. Von besonderem Interesse ist die
Steuerung der Frequenz durch nur einen Schaltungsparameter zur Vereinfachung des Stellgliedes. Dabei spielt die Amplitudenregelung eine ausschlaggebende Rolle für die Funktion des Oszillators.
-2-
Neben die klassischen Anwendungen von Oszillatoren als Generatoren in
Nachrichtentechnik
und MeBtechnik tritt in zunehmendem MaBe eine neue
meBtechnische Anwendung:
Oszillatoren als MefJgröfJenconverter in frequenzanalogen ProzeB-MeBsystemen, d.h., MeBsysteme, in denen die Frequenz wegen ihrer besonderen Übertragungssicherheit
die informationstragende GröBe darstellt 1.24.30). Bei hohen Anforderungen
an die Genauigkeit der Konversi~n der zu messen den GröBe in eine Frequenz dominiert der harmonischeOszillator
2.3). Eine schnelle Verstellbarkeit
der Frequenz ist hier notwendig, damit die Ausgangsfrequenz des Oszillators einer
Veränderung der MeBgröBe mit geringer Verzögerung folgen kann.
Entsprechend ihrer vielfältigen Anwendungen sind harmonisch oszillierende
Systeme eingehend theoretisch untersucht worden, Z.B. von Andronov, Vitt
und Khaikin 4). Das Verhalten von Oszillatoren, bei denen die Amplitude
durch eine nichtlineare Kennlinie stabilisiert wird, wurde zuerst von Van der
Pol ") analysiert. Eine Reihevon Lösungen für amplitudengeregelte
Oszillatoren wurde vorgeschlagen, z.B. die klassischen sogenannten brückenstabilisierten
Oszillatoren von Meacham 6) und Bauer 7). Jedoch wurde bisher keine allgemeine Theorie der amplitudengeregelten
harmonischen Oszillatoren aufgestellt.
Das Problem der Amplitudenregelung
ist bisher theoretisch nur für spezielle
Fälle, vorwiegend aber empirisch gelöst worden. Nach Oliver 8), Freshour 9)
und Bergmann 10) kann eine gute Regeldynamik nur durch Kombination
von
Amplitudenregelung
und Stabilisierung durch Nichtlinearität
erzielt werden.
Stabilitätskriterien
für den geregelten Oszillator stellt Edson 11) auf. Ergänzend
dazu gibt Ternan 12) die Übertragungsfunktion
des Oszillators als Regelstrecke, die sogenannte "envelope transfer function" mit I/po an. Bergmann
führt zu demselben Zweck den Begriff "modulatorische
Ringverstärkung"
ein.
In allen Fällen handelt es sich urn Kleinsignalbetrachtungen.
Tatsächlich stellt
der Oszillator eine essentielle Nichtlinearität
im Regelkreis dar. Linearisierende
Näherungen sind in der Praxis nicht ausreichend, weil gerade die Antwort auf
groBe Störungen - Einschaltvorgänge, Umschaltvorgänge - entscheidend ist.
Ziel der vorliegenden Arbeit ist es,
- das konventionelle Amplitudenregelsystem
zu analysieren und die Grenze
der erreichbaren Regeldynamik hinsichtlich der Ausregelzeit von Amplitudenstörungen
zu finden,
- ein neuartiges Regelsystem mit wesentlich verbesserter Regeldynamik
bei
gleichzeitig groBer Spektralreinheit
anzugeben und zu untersuchen und
- harmonische Oszillatoren mit einem solchen Regelsystem zu realisieren.
Entsprechend gliedert sich die Arbeit in drei Abschnitte.
Im ersten Abschnitt wird zunächst ein allgemeines Modell des harmonischen
Oszillators vereinbart. An ihm wird die Notwendigkeit einer Amplitudenregelung erläutert. In einem Amplitudenregelsystem
stellt der Oszillator die Regelstrecke dar. Eingangssignal der Strecke ist ein Stellsignal zur Steuerung der
-3Kreisverstärkung des Oszillators, Ausgangssignal ist die Amplitude der erzeugten Schwingung. Für letzteres kann die Hüllkurvenfunktion - die u.a. auch
Bergmann anwendet - nur dann ohne weiteres akzeptiert werden, wenn die
Vorgänge im Regelkreis langsam gegenüber denen im eigentlichen Oszillator
verlaufen. Die Konsequenzen einer Nichteinhaltung dieser Bedingung - schnelIe Regelung! - werden quantitativ angegeben. Die Analyse der Regelstrecke
"Oszillator" ergibt, daB das dynamische Verhalten der Hintereinanderschaltung
eines integral wirkenden Zeitgliedes und eines exponentiell wirkenden nichtlinearen Gliedes entspricht. Diese Erkenntnis erlaubt die Dimensionierung von
optimalen Reglern. Sie weist überdies einen Weg, das störende nichtlineare
Verhalten zu eliminieren und so das dynamische Verhalten des geregelten
Oszillators zu verbessern: die Einfügung eines nichtlinearen Gliedes mit logarithmischer Kennlinie in den Regier 13).
Die bekannten speziellen Lösungen von Amplitudenregelungen können verallgemeinert werden. Es kann eine geringe, jedoch nicht essentielle Verbesserung
der Regeldynamik erzielt werden. Die Begründung dafür: übliche Gleichrichterschaltungen zur Bestimmung der Amplitude aus der Oszillatorschwingung
erfordern ein Filter zur Unterdrückung der Wechselkomponenten. Durch diese
Filter erhält der Regier TiefpaBverhalten. Zusammen mit der integral wirkenden
Regelstrecke stellt der Regelkreis ein System mindestens zweiter Ordnung dar,
das besonders dann zur Instabilität neigt, wenn die Regelkreisverstärkung zur
Sicherung einer hohen Amplitudenkonstanz hoch ist. Es kann gezeigt werden,
daB bei der Dimensionierung des.Regiers ein KompromiB zwischen guter Regeldynamik und Spektralreinheit der Oszillatorschwingung erforderlich ist: Eine
kleine Reglerzeitkonstante führt zu mangelhafter Unterdrückung von Wechselkomponenten im Stellsignal, deren Frequenz und Phase durch die Oszillatorschwingung bestimmt ist. Diese Wechselkomponenten haben ein nichtlineares
Verhalten des Oszillators zur Folge. Unter Berücksichtigung dieser Tatsache
werden Dimensionierungsvorschriften für Regier angegeben, die hinsichtlich
Frequenzstabilität oder Spektralreinheit optirniert sind.
Die nachteilige Wirkung der Gleichrichterschaltung in konventionellen
Amplitudenregelungen wird durch die Einführung einer Abtastschaltung zur
Erzeugung eines amplitudenproportionalen Signals beseitigt 14.15). :ber wesentliche Vorteil gegenüber konventionellen Regelschaltungen ist, daB das Abtastglied im eingeschwungenen Zus tand des Oszillators schon ohne jede Filterung
eine reine amplitudenproportionale Gleichspannung liefert. Durch den Verzicht
auf den Tiefpaûcharakter des Regiers kann die Regeldynamik urn GröBenordnungen verbessert werden, ohne daB die Spektralreinheit leidet.
Im zweiten Abschnitt wird zunächst die Wirkungsweise von Abtastelementen
zur Amplitudenmessung im Regelkreis er1äutert. Ein Abtastregler, der zu optimalem Regelverhalten führt, wird er1äutert und die Dimensionierungsvorschrift
wird angegeben. Die Strategie eines Abtastreglers kann derart auf das Verhalten
-4der Strecke abgestimmt werden, daB der Einschwingvorgang der Amplitude auf
It Schwingungsperioden (im ungünstigsten Fall) reduziert wird. Aus dem Abtastregier werden Aufbau und Dimensionierung eines einfachen stetigen Regiers
abgeleitet, der bei wesentlich geringerem Aufwand in seiner Wirkung dem Abtastregler nahekommt. Beide Reglerarten werden auf dem Analogrechner simuliert und ihr Verhalten wird diskutiert.
Im dritten Abschnitt wird die Realisierung einer Regelung nach diesem Prinzip beschrieben. Anwendung findet diese Regelung bei einem harmonischen
Oszillator, der als Präzisionsconverter für die Umsetzung kleinerWiderstandsbrücken,verstimmungen in frequenzanaloge Signale dient. Beschrieben wird das
Converterprinzip, das auf dem schon in der Praxis bewährten FALCONPrinzip 3) aufbaut. Im Gegensatz zu der hohen Präzision der Umformung war
bei diesem Converterprinzip das träge dynamische Verhalten, das auf der
konventionellen Amplitudenregelung beruht, ein entscheidender Mangel. Besonders berücksichtigt werden die in schnellen Oszillatorregelkieisen kritischen
Komponenten, die Stellglieder für Amplitude und Frequenz, sowie die sich aus
der Realisierung dieser Komponenten ergebenden Konsequenzen auf das
Oszillatorkonzept.
-51. GRUNDLAGEN
DER AMPLITUDENREGELUNG
1.1. Der Iineare Oszillator, Beschreibungsmodell
Die kennzeichnenden GröBen des Ausgangssignales eines linearen Oszillators
sind Frequenz und Amplitude. Je nach Anwendungszweck
kann die Höhe der
Frequenz oder die GröBe der Amplitude wichtiger sein. Injedem Fall istjedoch
die zeitliche Ableitung der Amplitude interessant:
Sie soll Null sein, die
Schwingung soll stationär sein. Die Frage, welche EinfluBgröBen Frequenz und
Amplitude bestimmen, soll an einem Oszillatormodell
beantwortet werden.
Allgemein läBt sich ein Oszillator in zwei Funktionseinheiten
aufteilen:
(1) frequenzbestimmendes
Gebilde,
(2) Energiewandier .
Das frequenzbestimmende
Gebilde gehorcht einer Differentialgleichung
2. Ordnung (im Idealfall; im Realfall auch höherer Ordnung), deren periodische
Lösung die Schwingfrequenz bestimmt. Der Energiewandier hat die Aufgabe,
aus einem Reservoir angebotene Energie so aufzubereiten, daB damit die im
schwingfähigen
Gebilde verbrauchte Energie kompensiert wird, Energieverbrauch und Energiezufuhr bestimmen die Amplitude.
Elektronische Oszillatoren können beschrieben werden, indem diese beiden
Funktionseinheiten
jeweils als Zweipol- oder als Vierpolnetzwerke
aufgefaBt
werden. Hier wird eine Vieipolbeschreibung
gewählt: Die Funktionseinheit
.frequenzbestimmendes
Gebilde" wird dargestellt durch ein Vierpolnetzwerk
aus passiven Elementen, die Funktionseinheit
"Energiewandier"
durch einen
idealen Spannungsverstärker
(ideal = Verstärkungsfaktor
konstant und frequenzunabhängig,
keine Steuerenergie, Ausgangsspannungsquelle
ohne Innenwiderstand). Die beiden Funktionseinheiten
bilden zu einem Kreis zusammengeschaltet den Oszillator (Bild 1) 16). Die Vierpoldarstellung
hat den Vorteil,
daB sich neben LC-Oszillatoren auch RC- und RL-Oszillatoren
einfach darstellen lassen.
Übliche frequenzbestimmende
Netzwerke besitzen in Operatorenschreibweise
,,"'
die Übertragungsfunktion
17)
.
,~
p/-r
U2
FN = - = ------U1
p2
p ait
+
+
(1)
Wo 2
Darin sind -r eine Zeitkonstante, a ein Übertragungsfaktor,
sowie p der Differentialoperator.
Für den idealen Verstärker gilt
Wo
die Kreisfrequenz
U4
(2)
Fv=-=v.
U3
Die Zusammenschaltung
fordert
von Netzwerk
und Verstärker
entsprechend
Bild 1
-6frequenzbeatimmendea
Gebilda (Netzwerk)
u,
Energiewandler
(Verstärker)
Bild I. AIIgemeines Oszillatormodell.
(3)
und damit
1
--v=O.
(4)
FN
sei die Ausgangsspannung des Oszillators und werde zur Vereinfachung im
Folgenden ohne Index geführt (u2 = u). Die bekannte Differentialgleichung
des Oszillators
U2
+ 2 D ti +
û
w02 U
=0
(5)
mit
a-v
D=--.
21'
(6)
Deren allgemeine Lösung ist
u
=
Uo e-Dt sin (wt
+ cp).
(7)
Darin ist D (G!. (6)) die Dämpfung einer harmonischen Schwingung mit der
Kreisfrequenz
(8)
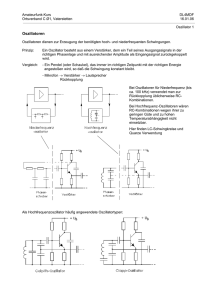
Einige Beispiele von Oszillatorschaltungen demonstrieren die allgemeine Anwendbarkeit dieses Oszillatormodells und zeigen, welche Netzwerkelemente die
Koeffizienten Wo und D (bzw. a und 1') der Differentialgleichung bestimmen.
-7-
al
bl
L
I
cl
...J
l-
r---------,
~--~~
~~~
v u,
L
_
Bild 2. Überfübrung
einer LC-Oszillatorschaltung
in die Modellschaltung von Bild 1 Cc).
Ca) über die Transistorersatzschaltung
Cb)
Bild 2 zeigt einen LC-Oszillator, der in zwei Schritten über die Transistorersatzschaltung unter Eliminierung ~lwesentlicher Elemente (Basiskombination, Transformator) in die Modelldarstellung transformiert wird. Hier wird
(9)
R2
a
= 1 + --,
Rl
..= R c.
2
Stellvertretend für die Klasse der RC- und RL-Oszillatoren zeigt Bild 3 einen
RC-Oszillator nach Wien in der Modelldarstellung:
-8r----------ï
I
I
I
'I
I
R.
I
11
C.ll
R)
I ___________
l-
:;:
Cl
I
I
I
I
I,
<J
Bild 3. Modell eines RC-Oszillators nach Wien.
Woz =
s, Cl n, c,
R2
,
(10)
Cl
a=l+-+s, C2
Die Modelldarstellung kann auch auf Zweipoloszillatoren angewandt werden
(Bild 4a). Wird der negative Widerstand durch einen rückgekoppelten Verstärker dargestellt - eine übliche Realisierungsmöglichkeit (Bild 4b) - dann
kann analog Bild 2 in die Modelldarstellung transformiert werden.
a)
b)
negativer
Widerstand
C>
Bild 4. Transformation des "Zweipoloszillators" in die Modelldarstellung nach Bild 1.
-91.2. Amplitudenstabilisierung
Die Lösung Gl. (7) der Differentialgleichung des linearen Oszillators Gl. (5)
läBt den EinfluB des Verstärkers auf die Amplitude erkennen: Eine stationäre
Schwingung ist nur möglich, wenn v = a ist, wenn also der Verstärkungsfaktor
gerade die Dämpfung des frequenzbestimmenden Netzwerkes bei der Schwingfrequenz aufhebt. Jede - auch vorübergehende - Abweichung von v = a hat
einen integralen Effekt auf die Oszillatoramplitude. In der Praxis ist es nicht
möglich, Verstärkungsfaktor und Netzwerkdämpfung so konstant zu halten,
daB der Oszillator über einen - bezogen auf die Schwingperiode - groBen
Zeitraum mit unveränderter Amplitude schwingt. Deshalb ist eine Einrichtung
notwendig, die v oder a abhängig von der Schwingamplitude macht, die z.B.
einem Abklingen der Amplitude durch VergröBerung des Verstärkungsfaktors
entgegenwirkt. Dieses ist allgemein als eine negative Rückkopplung (Gegenkopplung) auf den Verstärkungsfaktor zu bezeichnen.
1.2.1. Nichtlineare
Amplitudenstabilisierung
Die älteste Art, eine solche "Rückkopplung" einzuführen, hat zuerst Van
der Pol 5) analysiert. Sie besteht darin, daB der Oszillatorverstärker (oder ein
mit ihm in Kette geschalteter Vierpol) eine degressive Nichtlinearität nach
Bild 5 gewollt besitzt. Die mittlere Verstärkung ist dann abhängig von der
Amplitude. Sie verringert sich mit wachsender Schwingamplitude. Das führt
unmittelbar zu dem gewünschten Effekt der Amplitudenstabilisierung. Jedoch
variiert die differentielle Verstäikung mit dem Augenblickswert der Oszillatorspannung. Dieses führt zu Verzerrungen der Sinusform, die einerseits ein
Spektrum von Oberwellen elzeugen, andererseits zu einer Abhängigkeit der
Frequenz von der Amplitude führen 18). In der MeBtechnik sind Oszillatoren
mit Amplitudenstabilisierung durch Nichtlinearität daher nur bei reduzierten
Ansprüchen hinsichtlich der Präzision brauchbar.
--U3
Kleinsignalverstärkung
Gropsignalverstärkung
(û3~uO)
für û =uO
3
Bild 5. Nichtlineare Verstärkerkennlinie
des Van-der-PoI-OszilIators.
-101.2.2. Amplitudenstabilisierung
durch Regelung
Eine Amplitudenstabilisierung,
die die piinzipiell mögliche hohe Genauigkeit
des linearen Oszillators nicht beeinträchtigt, muû gewährleisten, daû sich - zumindestens im eingeschwungenen Zustand - die diffeientielle Verstärkung des
Oszillatorkreises
nicht in Abhängigkeit vom Augenblickswert
der Oszillatorspannung verändert.
Dieses kann mit einer Amplitudenregelung
- zumindest näherungsweise realisiert werden. Der Regelkreis besteht aus einem Melsglied zur Gewinnung
eines amplitudenabhängigen
Signales, einer Sollwert-Istwert-Vergleichsschaltung, einem Reglel und schlieûlich dem Oszillatorkreis als Regelstrecke (Bild 6).
Das Ausgangssignal des Regiers stellt den Verstärkungsfaktor
des Oszillatorverstärkers (oder das Übertragungsmaû
eines mit diesem in Kette geschalteten
Vierpols).
Die zuerst bekannt gewordenen amplitudengeregelten
Oszillatoren arbeiteten
mit einem sehr einfachen Regelkreis : Ein Heiû- oder Kaltleiter im ohmsehen
Gegenkopplungszweig
des Oszillatorverstärkers
vereinigt in sich alle für die
Regelung notwendigen Funktionen 6). Diese Schaltung wird wegen ihrer Einfachheit auch heute noch angewandt. Da man für die Wahl der Reglerparameter jedoch wenig Freiheitsgrade hat, wendet man bei höheren Ansprüchen
Schaltungen an, bei denen die einzelnen Funktionen voneinander getrennt realisiert sind.
Um die prinzipiellen Eigenschaften von amplitudengeregelten
Oszillatoren
und die Schwierigkeiten und Grenzen bei der Realisierung zu analysieren, wird
zunächst eine regelungstechnische Beschreibung des Amplitudenregelkreises
eingeführt.
Us
Begelstrecke
'Oszillator"
~---------------,frequenzbestimmendes
Netzwerk
Amplituden-'
me~glied
+
Oszillator-
verstärker
Regler
Steuereingang
für den
Verstärkungsfaktor
I
-~-------~-------Bild. 6 Amplitudenregelkreis.
,
-111.3. Analyse des linearen Oszillators mit konventioneller
Amplitudenregelung
Ein amplitudengeregelter Oszillator stellt ein System aus zwei vermaschten
Rückkopplungskreisen dar. Der äuBere Kreis (die Amplitudenregelschaltung)
hat die Aufgabe, den inneren Kreis (der Oszillator) in einem indifferenten
Gleichgewicht zu halten. Hier solI der Oszillator als Regelstrecke des Amplitudenregelkreises aufgefaBt werden. Für den Amplitudenregelkreis stellt der
Oszillator ein Gebilde dar mit einem Eingang zur Verstärkungssteuerung
v = I (UR) und einem Ausgang UG = g(û), an dem die Oszillatoramplitude
erscheint. Für den Entwurf des Regiers ist die Übertragungsfunktion FR = UG/U R
dieses Gebildes wesentlich.
Im Gegensatz zur DGL (5) des ungeregelten Oszillators ist die Differentialgleichung des geregelten Oszillatois nicht mehr eine Differentialgleichung
2. Ordnung mit konstanten Koeffizienten, da veine Funktion von u und t ist:
Ü
+
a-v(u, t)
Ü
't'
+
2
W0
U
= O.
(11)
v(U, t) wird durch den Regier und durch das AmpiitudenmeBglied bestimmt.
Eine geschlossene Lösung dieser Differentiaigieichung ist nur für spezielIeFälle
mögIich. Sie ist in jedem Fall sehr aufwendig und überdies unübersichtlich.
Daher solI hier ein anderer Weg beschritten werden.
KonventionelI dienen zur Amplittidenmessung Mittelwertgleichrichter.
Mittelwei tgleichrichter produzieren ein AusgangssignaI, daB sich - bei einer
Wechselspannung mit konstanter Amplitude als Eingangssignal - aus einer
amplitudenabhängigen Gleichspannungskomponente und Harmonischen der
Eingangswechselspannung zusammensetzt. Der Regier übernimmt deshaib zwei
Funktionen:
(a) Filterung: Unterdrückung dieser Wechselspannungskomponenten,
(b) Regelung: Bildung eines Stellsignals UR aus der Abweichung del Gleichspannungskomponente vom Sollwei t, das zu einer für ein stabiles Arbeiten
des Regelkreises geeigneten Einstellung der StellgröBe v führt.
Das Stellsignal UR setzt sich deshaib aus schnell veränderlichen Anteilen von
geringer Amplitude - Reste der Wechselspannungskomponenten, also Harmonische von u - und einem überwiegenden Iangsam veränderlichen Anteil
- der entsprechend (b) verarbeiteten Hüllkurvenfunktion
zusammen.
Die Filte.eigenschaft des Regiers (TiefpaBverhalten) beeinfluBt die Dynamik
des Regelkreises wesentlich, so daB Änderungen der Amplitude dû/dt im Vergleich zur Oszillatorschwingung u sehr langsam sind. Damit ist gewährleistet
daB der Oszillator immer zumindest näherungsweise harmonisch schwingt.
Zur Lösung der DGL (11) des geregelten Oszillators liegt es daher nahe, die
Einfiüsse der schnell veränderlichen und der langsam veränderlichen Komponenten im Stellsignal auf die Differentialgleichung getrennt zu untersuchen.
û
-
-12Angestrebt wird eine Lösung, die einer Aussage über die Schwingungsform der
Oszillatorspannung
sowie eine zweite Lösung, die eine Aussage über den Hüllkurvenverlauf (= Amplitudenverlauf)
gibt.
Ziel dies er Analyse ist, das Amplitudenverhalten
des Systems Oszillator/
Regier zu beschreiben (zweite Lösung). Da die Filtereigenschaften
des Regiers
jedoch einen wesentlichen Einfluû darauf haben, muB zunächst ermittelt werden, welche Filtercharakteristik
zu fordern ist, d.h., bis zu welchem Grade
Wechselkomponenten
aus dem Stellsignal herausgefiltert werden müssen und
welche Wirkungen (Frequenzversatz,
Klirrfaktor)
Reste von Wechselkomponenten haben (ers te Lösung).
1.3.1. Einfluj3 der Regelung au! Linearität und Frequenzkonstanz
Die Gleichrichterschaltung
stellt ein nichtlineares Glied dar. Dessen Kennlinie kann allgemein durch eine Potenzreihe beschrieben werden:
(12)
mit UG als Gleichrichterausgangsspannung.
Als Gleichrichterschaltung
werden
Zweiweggleichrichter
bevorzugt, da in ihrem Ausgangssignal die Grundwelle
des Eingangssignals nicht mehr enthalten ist. Eine Zweiweggleichrichterschaltung wird näherungsweise durch eine quadratische Kennlinie beschrieben :
(13)
Mit der Übertragungsfunktion
gangsspannung
FR(p) des Regiers wird daraus
die Regleraus-
(14)
Darin ist Us die Spannung am Sollwerteingang des Regiers, die die Sollamplitude Uo bestimmt. Der Verstärkungsfaktor
des Oszillatorverstärkers
ist dann
- vorausgesetzt,
der Mechanismus
zur Steuerung der Verstärkung
arbeitet
zumindest bereichsweise linear (15)
Im eingeschwungenen Zustand des Regelkreises wird die StellgröBe v aus einer
Konstanten und einer Wechselkomponente
bestehen:
v
=
Vo
+ v_Ct).
Die Wechselkomponente
kann entsprechend
Regiers zu u phasenverschoben
sein. Sie kann
zerlegt werden.
(16)
der Übertragungsfunktion
des
in Real- und Blindkomponente
-13 Realkomponente:
(17)
kr*
= k,
U
=
ks kG,
sin (wot);
û
Blindkomponente:
V~b
=
kb*
û2
-
sin (2wot)
2
kb*
=
=
J (t û
2 Wo kb*
2 -
u2) dt;
0~
kb ks kG,
worin k, bzw. kb die Abschwächung ist, die ein Signal mit der doppelten Oszillatorfrequenz im Regler erfährt. Das Einsetzen von GIn (16) und (17) in die
DGL (11),
1
Ü
+ -'t' [(a -
o-
V
t k,* û2)
+ k,* u
2
] Ü
+ Wo
2
U= 0
(19)
führt zur Van der Pol'schen Differentialgleichung 18), also zu einer scheinbaren
Verstärkernichtlinearität! Das kann anschaulich so erklärt werden (siehe Skizze
in Bild 7a): Der Verstärkungsfaktor wird mit der doppelten Oszillatorfrequenz
modulieit. Jeweils in den Extrema der Schwingung erreicht die Verstärkung ein
Minimum, in den Nulldurchgängen ein Maximum. Das entspricht einer degressiven symmetrischen nichtlinearen Kennlinie. Die Folgen sind - wie die Lösung
der Van der Pol'schen Differentialgleichung 18.19) zeigt - Klirrfaktor und
Frequenzversatz der Oszillatorschwingung.
Das Einsetzen von GIn (16) und (18) in die DGL (11) ergibt
1
Ü
+-
7:
[a - vo - Wo kb* û2 t
+ 2 Wo k * J u
b
2
dt]
Ü
+ wo2
U = O.
(20)
Der Aufbau dieser nichtlinearen Differentialgleichung weist darauf hin, daB die
Oszillatorschwingung auch hier Oberwellen enthält und in der Frequenz versetzt wird. Die Modulation des Verstärkungsfaktors mit der urn n/2 phasengedrehten Oszillatoroberwelle führt jedoch auBer zu einer scheinbaren Nichtlinearität der Verstärkerkennlinie zu einer scheinbar komplexen Verstärkung,
wie die Skizze in Bild 7b veranschaulicht. Im Gegensatz zu Gl. (19) ist daher
der Frequenzversatz hier kein Effekt zweiter Ordnung, sondern offenbar ein
Effekt erster Ordnung! Eine Lösung dieser Differentialgleichung wurde nicht
erarbeitet, da zusätzliche Erkenntnisse, die den mathematischen Aufwand rechtfertigen würden, nicht erwartet werden.
Hieraus ergeben sich die Anforderungen an die Filtereigenschaften des
Regiers : Der Regier muB TiefpaBcharakter für die Harmonischen der Oszillatorschwingung besitzen. Die TiefpaBgrenzfrequenz muB im Verhältnis zur Oszil-
-14latorfrequenz urn so niedriger liegen, je besser die Frequenzkonstanz und die
Spektralreinheit der Schwingung sein solI. Wird irn wesentlichen Wert auf Frequenzkonstanz gelegt, dann rnuB vermieden werden, daB Blindkornponenten
der Harmonischen gebild et werden, Gl. (18).Aus der Frequenzabhängigkeit der
Amplitude dieser Blindkomponenten resultiert eine nichtlineare Abweichung in
der Steuerkennlinie von z.B. widerstandgesteuerten Oszillatoren. Das stört besonders bei Converterschaltungen (wie z.B. 2.3)). Tiefpaûcharakter zweiter
Ordnung, d.h. Phasendrehung urn oe und damit keine Blindkomponente, soUte
vermieden werden, da dadurch der Verstärker eine scheinbar progressive nichtlineare Kennlinie erhält (Bild 7c), also einer Stabilisierung entgegenwirkt.
AuBerdem wird die Stabilisierung des Regelkreises rnit zunehmender Ordnung
des Filters schwieriger.
al
b)
cl
Bild 7. EinfiuJ3einer Wechselkomponente von 2wo in der Stellgröûe v auf die Oszillatorausgangsspannung 114 und scheinbare Verstärkerkennlinie bei verschiedenen Reglerfrequenzgängen.
I
I
15 -
1.3.2. Die Regelstrecke "Oszillator"
Eingangsgrö13e der Regelstrecke "Oszillator" ist das Stellsignal v = ks UR,
die Schwingungsamplitude
Die Lösung der Differentialgleichung des ungeregeIten Oszillators Gl. (7) gibt an, wie sich die Oszillatorschwingung in Abhängigkeit von del' Verstärkung verhält. Sie kann jedoch
nicht ohne weiteres der Übertragungsfunktion
= I (v) zugrunde gelegt werden, da sie als Lösung der Differentialgleichung des Oszillators nur dann ohne
Einschränkung gilt, wenn die Koeffizienten der Oszillator-Differentialgleichung
- und damit auch v! - konstant sind.
Für die regelungstechnische Analyse liefert die Sprungantwort ausreichende
Information über das Verhalten eines Systems. Zu untersuchen ist also, wie der
Oszillator auf einen Sprung von v reagiert.
Für die Betrachtung des Amplitudenverhaltens ist der Augenblickswert der
Oszillatorspannung uninteressant. Wichtig ist deren HülIkurve, die sich aus
Ol. (7) ergibt:
û(t) = Uo e-Dt•
(21)
Ausgangsgröûe
û.
û
Die Antwort der Amplitude auf einen Sprung in v bzw. D aus dieser Gleichung
herzuleiten, ist sicher zulässig für kleine v-Sprünge bzw. langsame v-Änderungen. Die exakte Rechnung solI zeigen, wo die Orenzen dieser Betrachtungsweise
liegen:
o
t
___
t
u ,û
t
,,
Bild 8. Sprungfunktion
in D, Reaktion der Amplitude.
-16 Betrachtet sei der in Bild 8 skizzierte allgemeine Fall, daB bei der Schwingung
u
=
Uo e-Dt sin (tot
+ cp)
(22)
zu einem beliebigen Zeitpunkt tI D geändert wird durch eine sprungartige
Änderung von v. Die Schwingung gehorcht nach tI wieder derselben Gleichung
mit veränderten Parametern Uo, D und tp:
(23)
Nur wenn die Hüllkurve dieser Schwingung stetig ist, d.h. wenn
(24)
ist, kann die Hüllkurvenfunktion Gl. (21) der weitelen Berechnung zugrunde
gelegt werden. Tatsächlicli ist, wie sich durch Gleichsetzen von Funktion und
Ableitung der GIn (22) und (23) bei t = tI eigibt,
Uo*
=
ût1
sin ~
------------
sin {arccot [cot(~)
+ LlD/wl}
(25)
mit
LID
ca
D* -D
---=---Llv
W
1
21'w
und
Die Unstetigkeit der Hüllkurve ist eine Funktion der GröBe des Sprunges Llv
und der Phasenlage ~, zu der er eintritt. Bild 9a zeigt als typische Lösung von
Gl. (25) den Hüllkurvensprung als Funktion von ~ für sehr groBe Llv:
(1/21'w) Llv = ± 1. Nur bei der Phasenlage ~ = n n, n = 0, 1, 2 ... ist die
Hüllkurve stetig. Bild 9b zeigt die Extrema der Funktion in Abhängigkeit von
ILlvl. Die zwischen den beiden Kurven aufgespannte Ordinate gibt die im ungünstigsten Fall auftretenden Hüllkurvensprünge an. Die Lösung zeigt, daB für
1(1/21'w)Llvl < 0·1 die Hüllkurvenunstetigkeit so klein wird, daB sie auf die
Regeldynamik keinen wesentlichen EinfluB mehr hat. Wegen der nach Abschnitt 1.3.1 erforderlichen Filtereigenschaft des Regiers können bei konventionell amplitudengeregelten Oszillatoren v-Änderungen genügend langsam,
d.h. v-Sprünge genügend klein vorausgesetzt werden, so daB für die Analyse
der Regelstrecke "Oszillator" die Hüllkurvenfunktion zugrunde gelegt werden
kann.
Ausgangssituation für die Berechnung der Sprungantwort sei die stationäre
Schwingung mit D = 0, also v = Vo = a. Auf den v-Sprung +Llv zur Zeit
-17-
Wlr-----~~----~------_T------,
u'
o!;t
0·5
a}
0
0
1·01t
O·SIt
I·SIt
2'0
..
-
e:) ~U:) t
~
mQ)!.' ~
min
1·5
1·0
0-5
b}
0
0-01
1_1_ Avl_
0·1
1
2~1II
Bild 9. Lösungen der oi, (25).
(a)
U, •
-aD
=/(</»'-2
'1
(b)
(Uo·)
lÎ'1
t
=
mu..
1
.co
(Uo·)
lÎt1
Llv
mln'
=
±
1;
=/(1_12.co Llvl)·
0 reagiert dann die Amplitude gemäJ3Gl. (21) und Gl. (6)
Û
=
tr; exp
(2~ t).
Llv
(26)
also mit einer Änderung gegenüber dem ungestörten Fall
(27)
Die Reihenentwicklung der Exponentialfunktion
Llû
=
1
Uo ( -Llv
2.
t
18-
1 1
)
+ --(LlV)2 t2 + ...
2 (2.)2
(28)
ergibt in erster Näherung eine Rampenfunktion: die Sprungantwort eines Integrators. Sie ist identisch mit der Tangente an die Hüllkurve im Zeitpunkt der
Störung eines stationär schwingenden Oszillators durch eine v-Störung. Die
Steigung der Tangente ist in Betrag und Vorzeichen abhängig von dieser vStörung.
Auf einem anderen Weg hat auch Ternan 12) diese Tatsache gefunden. Für
eine Analyse des Regelkreises und besonders für die Synthese des optimalen
Regiers reicht jedoch eine Ersatzbetrachtung, bei der die stark nichtlineare
Eigenschaft der Strecke nicht berücksichtigt wird, noch nicht aus. Im folgenden
wird eine Ersatzschaltung angegeben, bei der die nichtlineare Zeitfunktion der
Strecke in eine lineare Zeitfunktion und eine nichtlineare statische Kennlinie
zerlegt wird.
--.I'
~
I I ·1
v
Integrator
L.....___...J
,
~û
.-
Vbertragungsg11ed m1t
exponent1eller Kenn11nie
Y = kII-ra-v(t)]dt
Bild 10. Ersatzbeschreibung
für den Oszillator bezüglich Amplitudenverhalten.
Llv t ist die Antwort eines Integrators auf die Sprungfunktion Llv. Da Llv t
in Gl. (27) das Argument einer e-Funktion darstellt, liegt es nahe, Gl. (27) als
Sprungantwort 'der Kettenschaltung aus einem Integrator I und einem Übertragungsglied mit exponentieller Kennlinie E zu interpretieren (Bild 10). Der
Integrator gehorcht dabei dem Gesetz
Y
= kr J -[a -
vet)] dt.
(29)
Dabei ist Yeine ZwischengröBe, die im Oszillator nicht auftritt, k, die Integrationskonstante. Für den zugrunde gelegten Fall - Ausgangssituation stationäre Schwingung (a - v = 0), v-Sprung Llv zur Zeit t = 0 - wird
Y = Yo
+ LlY
=
Yo
+ kr J Llv dt = Yo + kr Llv t.
(30)
Die nachgeschaltete Exponentialfunktion wird beschrieben durch
(31)
-19 mit dem Kennlinienfaktor
kE• Für Llû
= f(Llv, t)
+ Llû = kE
exp (Yo
ergibt
sich aus GIn (30)
und (31):
û
=
Uo
Uo = ûlt=o
Llû
=
=
+ k1 Llv
kE exp (Yo),
t),
(32)
ûlt=o [exp (kl Llv t) -1].
Durch Koeffizientenvergleich
mit Gl. (27) wird kI = 1/27: gefunden.
Diese Ersatzschaltung
gibt das Amplitudenverhalten
des Oszillators in den
regelungstechnisch wichtigen Eigenschaften - integrales Verhalten und amplitudenproportionale
Verstärkung - richtig wieder. Sie darf jedoch, wie oben
beschrieben, ohne Einschränkung nur bei kleinen Llv-Sprüngen bzw. langsamen
v-Änderungen angewandt werden.
1.4. Dimensionierung
des Regiers
Bei der Dimensionierung
des Regiers müssen die folgenden Bedingungen
berücksichtigt werden:
(a) Der Regier soIl im unteren Frequenzbereich
integral wirken, damit die
Abweichungen der 1st-Amplitude von der SolI-Amplitude klein werden.
(b) Der Regier muB im ruittleren Frequenzbereich propor tional arbeiten, da nur
dann der Regelkreis mit der integral wirkenden Strecke stabil sein kann.
(c) Der Regier muB im oberen Frequenzbereich
(co ~ 2coo) abschwächend
arbeiten, damit scheinbare Verstärkernichtlinearitäten
und/oder -phasendrehungen klein gehalten werden.
Aus der Literatur bekannte Regelsysteme arbeiten meistens ruit einem Regler,
der eine TiefpaBfunktion besitzt. Bild 11 zeigt ein solches Regelsystem mit dem
im vorangehenden Abschnitt gefundenen Oszillatorverhalten
in regelungstechnischer Darstellungsform
(z.B. 20)). Es ist ersichtlich, daB die Phasenreserve
(Phase bei der Frequenz, bei der die Regelkreisverstärkung
= 1 wird) notwendigerweise kleiner als n/2 ist. Wenn die Regelabweichung
klein sein soll und
die Harmonischen gut unterdrückt werden sollen, führt das zu dem bekannten
oszillierenden Übergangsverhalten.
Die n/2-Phasendrehung
der Gleichrichteroberwellen (speziell 2coo) verursacht die beschriebenen amplitudenabhängigen
Frequenzfehler.
1.4.1. Optimaler Regier für höchste Frequenzstabilitiit
In Abschnitt 1.3.1 wurde abgeleitet, daB geringster Frequenzversatz zu erwarten ist, wenn Oberwellen der Oszillatorschwingung im Regier nicht in der Phase
verschoben werden. Dazu muB der Regier für hohe Frequenzen proportional
wirken. Die drei ob en angeführten Bedingungen für den Reglerfrequenzgang
werden durch einen P 1- Regier erfülIt. Für die P- Verstärkung liefert die Lösung
der Van der Pol'schen Differentialgleichung
die Dimensionierungsvorschrift,
-20-
Oazillator
-i 1----------Ig~
Regler
4>
re
\.
I
Ua
-'2
Ig(l)
t
z:: ..... __
"
... ..... _---
aufgetrennte
Schleife
- - - - .........J: 1~Phasenreserve
tt1
Bild 11. Frequenz- und Phasenverläufe
bei einem Regier mit Tiefpal3charakteristik.
für die Integrationskonstante
bzw. für die Eckfrequenz regelungstechnische
Stabilitätskriterien.
Nach der von Landvogt 19) angegebenen Lösung der verallgemeinerten Van
der Pol'schen Differentialgleichung ist der Frequenzversatz
Llcoo
1
--R::J--B
COo
16
2
(33)
und die Amplitude der 3. Harmonischen, die hauptsächlich den Oberwellengehalt bestimmt,
K3
=
û(3coo)
û(coo)
l=:::i-!s.
(34)
sist das MaB für die Nichtlinearität. Mit
û2
s=---
4
gilt diese Lösung für Gl. (19).
kr*
"COo
(35)
-
21 "'-
Bild 12 zeigt die Frequenzgänge von Regler, Strecke und geschlossenem
Kreis. Die P-Verstärkung des Regiers ist
(36)
per definitionem in Gl. (17). Die Eckfrequenz os, des PI-Reglers soll so gelegt
werden, daB die Kreisverstärkung dort gerade 0 dB erreicht. Bei einer integral
wirkenden Strecke ist dann die Phasenreserve 45°, so daB ein hinreichend gedämpfter periodischer Einschwingvorgang zu erwarten ist 20). Wenn kr* die
Integiationskonstante der Strecke (= Oszillator und Gleichrichter entsprechend
Bild 6) ist, wird
(37)
Vorausgesetzt wird, daB das Stellglied linear und trägheitslos wirkt *). Dann
ist ks eine Konstante. kr* und kG sind abhängig von der Wahl des Gleichrichters.
Ig ~
z.s:
Ig!!&
_~R
,
J_n::~_--..
~----~'~,~~---
Oszillator
19w
Regler
aufgetrennte
Schle1fe
$~-------------It
__
~ ...
------
"'tPhasenreserve 450
Bild 12. Frequenz- und Phasenver1äufe bei einem Oszillator mit PI-Regler.
*) Realisierungsmöglichkeiten
werden in Abschnitt 3.3 angegeben.
-221.4.1.1. Strecke
mit quadratischem
Gleichrichter
Für den in Abschnitt 1.3.1 der theoretischen Betrachtung zugrunde gelegten
quadratischen Gleichrichter mit der Kennlinie nach Gl. (13) ist kG eine Konstante. kI* ist aus folgender Gleichung definiert:
.
L1üè;(P)
1
=
k/ L1v(p) - .
(38)
P
Da in diesem Fall keine MaBnahmen vorgesehen sind, die das nichtlineare
Verhalten der Strecke gemäû Gl. (32) kornpensieren, wird zunächst eine Kleinsignalbetrachtung in der Nähe des Sollwertes angesetzt, d.h.,
Uo. Nach
Gl. (28) ist dann
û
1
L1û(t) ~
û
-
L1v(t) t.
~
(39)
2.
Nach Gl. (13) ist
(40)
Daraus wird
1
1
L1üG(p) ~ kG - û2 L1v(p) -.
2.
P
Ein Koeffizientenvergleich mit Gl. (38) ergibt mit
zeitkonstante
(41)
û
=
Uo die Integratieris-
(42)
Die Dimensionierungsvorschriften für den Regier sind mit Gin (35) und (36)
respektive (37) und (42)
Vp
== k, = --
1
ks kG
OJr
=
2wo
Ezul
V2.
4
.wo --
U02
Ezub
(43)
(44)
Bei einem durchstimmbaren Oszillator sollte Wr nach dem niedrigsten Wo
dimensioniert werden, da mit wachsendem Wo die Stabilitätsreserve zunimmt.
Bild 13 zeigt die Antworten der Oszillatoramplitude auf v-Sprünge
L1v = ± 0·05 (nach Bild 9b noch gut zulässig) bei einer Reglerdimensionierung
für lL1wo zudwol < 10-5, d.h. Ezul ~ 10-2. Auffällig ist die starke Abhängigkeit des Einschwingvorganges von der Amplitude sowie vom Vorzeichen des
v-Sprunges. Die Ursache liegt natürlich im nichtlinearen Verhalten der Strecke.
Sie führt zu einer Amplitudenabhängigkeit der Kreisverstärkung und der Sta-
-
23-
2
t
~o
Wo
2i
t_
Bild 13. Sprungantworten
PI-Regler, 6 = 10-2•
der Oszillatoramplitude.
Strecke mit quadratischem
Gleichrichter,
bilitätsreserve. k, muB nach Gl. (36) für die maximale Sollamplitude dimensioniert werden, so daB die P-Verstärkung für kleine Amplituden nicht mehr
optimal ist. Besonders leidet darunter das Anschwingverhalten (sehr kleine
Amplitude I). Im Gegensatz zu üblichen TiefpaBreglern nimmt jedoch die Stabilitätsreserve mit wachsender Amplitude zu, so daB der Regelkreis bei groBem
Überschwingen der Amplitude nicht wie dort Gefahr läuft, instabil zu werden.
1.4.1.2. Strecke
mit Zweiweggleichrichter
In der Praxis wird man anstelle des für die Theorie besser handhabbaren
quadratischen Gleichrichters den einfacher realisierbaren Zweiweggleichrichter
anwenden:
(45)
Für den EinfluB der Regelung auf die Linearität des Oszillators entsprechend
Abschnitt 1.3.1 ist im wesentlichen die 2. Harmonische verantwortlich. Die
Fourier-Analyse ergibt
(46)
-24Urn hinsichtlich des Oberwellengehaltes im Stellsignal vergleichbar zu sein, muf
k,* aus Gl. (17) hier lauten
8 1
kr* =krkSkG*--.
(47)
3n Û
Mit Gl. (35) und
û
= Uo
resultiert daraus die P-Verstärkung.
(48)
Da nach der Fourier-Analyse
(49)
ist, wird analog zu Abschnitt 1.4.1.1
1 1
k[* = --kG*
(50)
Û,
Tn
so daû
(51)
2
,200
~t_
21t
Bild 14. Sprungantworten
Regler, e = 10-2•
der Oszillatoramplitude.
Strecke rnit Zweiweggleichrichter,
PI-
-25
-
Bild 14 zeigt Sprungantworten bei derselben Dimensionierung, wie sie Bild 13
zugrunde lag (s
10-2). Wie der Vergleich der Reglereckfrequenzen erwarten
lieû, reagiert der Regier bei Sollamplitude etwas langsamer. Andererseits wird
die Abhängigkeit von der Amplitude auch etwas geringer (in v perscheint
I/Uo anstel1e I/Uo2).
R:j
1.4.1.3. Linearisierung
der Strecke
Das nichtlineare Verhalten der Strecke kann eliminiert werden und damit
die Amplitudenabhängigkeit der Regeldynamik vollständig beseitigt werden,
indem die Exponentialfunktion (Block E in Bild 10) durch eine Logarithmusfunktion kompensiert wird 13). Die Ersatzschaltung aus Bild 10 betrifft nur das
Hüllkurvenverhalten. Deshalb muf die Hüllkurve logarithmiert werden. Derselbe Effekt läût sichjedoch erreichen, wenn die (oberwellenhaltige) Ausgangsspannung des z.B. quadratischen Gleichrichters logarithmiert wird (Bild 15):
1st die Eingangsspannung eines Logarithmiergliedes mit Gl. (13)
UG = kG u2 = kG
û2 sin2 (cot),
(52)
dann ist dessen Ausgangsspannung
UL = kL1
log,
(kL2 UG) = 2kL1
(log, Û
+ log, Isin cotl + t log, kL2 kG)'
(53)
Die Fourier-Analyse liefert den Mittelwert
ÜL
= 2kL1 (log,
Û
=
Iog, 2
+ t log, kL2
(54)
kG),
der bis auf eine Konstante mit dem Logarithmus der Hüllkurve übereinstimmt.
Tiefpaêfilter vor der Logarithmierung zur Gewinnung der Hüllkurve würden
dagegen amplitudenabhängige Zeitkonstanten in den Regelkreis bringen.
Gleichung (53) zeigt, daû der quadratische Gleichrichter ohne weiteres durch
einen Zweiweggleichrichter ersetzt werden kann. Dabei entfällt lediglich der
im folgenden kL1 jeweils zugeordnete Vorfaktor 2.
aus Gl. (26) in Gl. (54) eingesetzt ergibt
û
_
UL
L1 (
2k
= -_
In b
ÜL
-1 Llv t + In Uo 21"
0·693
+ tIn
)
kL2 kG ,
= k * Llv t + const,
j
Sollwert
Gleichrichter
Regler
u
Bild 15. Linearisierung der Strecke durch Logarithrnusfunktion.
(55)
-26d.h. lineares integrales
Verhalten
mit der Integrationskonstanten
1 2kLl
k]* =---.
2. In b
Die Fourier-Analyse
(56)
ergibt für die 2. Harmonische
2kLl
UL(2wo) =-In b
A
unabhängig
wird damit
von der Amplitude
(57)
der Oszillatorschwingung!
2kLl
k*=kks---.
r
r
Gegenüber
Gl. (17)
2
(58)
In b û2
I
Darnit wird auch die scheinbare Nichtlinearität
der Veistärkerkennlinie
entsprechend GIn (19) und (20) von der Amplitude unabhängig!
Die Dimensionierungsvorschriften
für den Regier sind nach GIn (35) und
(58) resp. (37) und (56):
Vp
== k,
os, = Wo
2
In b
=
ks 2kLl
8zul
2.wo
(59)
8zuh
(60)
l/2.
I
I
I
I
t
û
Ua
I
Äv=+O·05
I
I
I
100
200
~t_
Bild 16. Sprungantworten
der Oszillatoramplitude.
Linearisierte Strecke, PI-RegIer,
6
=
10-2•
- 27Bild 16 zeigt Sprungantworten bei der den Bildern 13 und 14 zugrunde liegenden Dimensionierung (s
10-2). Die Regeldynamik ist vollkommen unabhängig von der Amplitude, was besonders dem Anschwingvorgang zugute
kommt. Allerdings ist die Dynamik bei der Sollamplitude schlechter als ohne
Linearisierung. Ursache dafür ist, daB der Oberwellengehalt bezogen auf die
P-Verstärkung bei der Sollamplitude bei Vorschaltung einer Logarithmusfunktion gröBer wird. Bei positiver- Störung ist ein sehr hohes Überschwingen zu
beobachten, da sich das System linear nur hinsichtlich des Logarithmus der
Amplitude verhält.
Rj
1.4.2. Optima/er Reg/er fûr höchste Spektra/reinheit
Dieses Dimensionierungskriterium erfordert möglichst weitgehende Abschwächung der Oberwellen im Stellsignal. Phasendrehungen der Oberwellen
sind zulässig, wenn nicht gleichzeitig auch die Frequenzstabilität extrem sein
muB. Hier bietet sich einPI-T1-Regler an (Bild 17).Harmonische der Oszillatorfrequenz im Stellsignal werden urn -n12 in der Phase gedreht, so daB der
Berechnung des Oberwellengehaltes in der Oszillatorschwingung selbst Gl. (20)
zugrunde gelegt werden muB. Da Lösungen dieser Differentialgleichung nicht
vorliegen, wird die Abschätzung herangezogen, daû der Oberwellengehalt dem
des Van-der-Pol-Oszillators entspricht (Gl. (35)).
u~
Ig ü(j
RegIer
-~r--_.,' ......
---~
~~-------_-_-_-_-------
Igw
aufgetrennte
Schle1fe
-Tt
.".'-,-
........
_
Phasenreserve
Bild 17. Frequenz- und Phasenverläufe
bei einem PI-TI-Regler.
-28 Bei einem PI-TI-Regier ist die Phasenreserve des geschlossenen Regelkreises
a!fi gröûten, wenn die Kreisverstärkung 0 dB erreicht bei dem geometrischen
Mittel Wr der beiden Eckfrequenzen des Reglers, Dieser Fall wird "symmetrisches Optimum" genannt 21). Die Konstante 'exkennzeichnet die Frequenzverhältnisse derart, daf die Eckfrequenzen des Regiers wr/ex und exCOr werden.
Im Gegensatz zum PI-Regier nimmt die StabiIitätsreserve hier sowohl bei
Erhöhung als auch bei Verminderung der Oszillatorfrequenz ab. Bei nicht oder
wenig veränderlicher Frequenz reicht ex= 2·4 für ein gutes Einschwingverhalten aus (Phasenreserve = 45°) 20). Bei einem durchstimmbaren Oszillator
muf exentsprechend gröûer sein. Einschwingvorgänge bei Abweichung vom
symmetrischen Optimum gibt Leonhardt 21) an.
1.4.2.1. Strecke
mit quadratischem
Gleichrichter
P sei die P-Verstärkung des Reglers. Dann ist die Abschwächung der 2. Harmonischen im Regier
(61)
Für das symmetrische Optimum ist
=
oi;
Pk*
(62)
kso
I
Mit kb* nach Gl. (18) und der Substitution nach Gl. (35) (worin kr* = kb*
zu setzen ist) sowie kr* entsprechend Abschnitt 1.4.1.1 (Gl. (42)) werden die
Dimensionierungsvorschriften für P und wr:
(e I)1/2
1
4
P=---c
coo--2
e
co,
ZU
-
u;
ks kG
zul
= 2010 ( ---;;
(63)
,
ex
)1/2
(64)
•
Bild 18 zeigt Amplitudenantworten auf v-Sprünge Llv = ± 0·05 für die Dimensionierung K3 zul = 10-4 (e = 8 . 10-4) und ex= 2·4.
1.4.2.2. Strecke
mit Zweiweggleichrichter
Mit kb* = kr* nach Gl. (47) und kI* nach Gl. (50) (entsprechend Abschnitt
1.4.1.2) werden die Dimensionierungsvorschriften für P und wr:
1
{3=---*
10
-CWo-
ks kG
to, = Wo (
Uo
)1/2
ezul
3 ---;;
.
(
I)1/2
eZU
3ex
,
(65)
(66)
- 29-
t
~o
Bild 18. Sprungantworten der Oszillatoramplitude.
PI-T1-Regler, e = 8.10-4•
Sprungantworten
(s = 8 . 10-\ ex
Strecke mit quadratischem
zeigt Bild 19. Die Dimensionierung
= 2·4).
1.4.2.3. Linearisierte
Gleichrichter,
entspricht Bild 18
Strecke
Mit kb* = kr* nach Gl. (58) und k[* nach Gl. (56) (entsprechend Abschnitt
1.4.1.3) werden die Dimensionierungsvorschriften für f3 und Wr:
f3 =
ln b 2'rwo (2
ks 2kL1
ezul
os, = Wo ( 2 --;:
)1/2
.
e:ul)1/2,
(67)
IA.
(68)
Sprungantworten zeigt Bild 20. Die Dimensionierung entspricht Bild 18
(e = 8 . 10-\ ex = 2·4).
Bild 21 zeigt die Abhängigkeit der Sprungantwort von der Frequenz
(e = 8 . 10-\ ex = 2'4). Es stellen sich Einschwingvorgänge entsprechend 21)
ein. Bei Oszillatoren, deren Frequenz über einen gröBeren Bereich variiert .
werden soll (z.B. im Verhältnis 1 : 10, wie in dem in Bild 21 dargestellten
-
30-
2
50
100
150
~I2ft
Bild 19. Sprungantworten der Oszillatoramplitude. Strecke mit Zweiweggleichrichter, PI-TlRegIer, B = 8.10-4•
2
f
~o
50
150
100
~I-
Bild 20. Sprungantworten
B = 8.10-4•
der Oszillatoramplitude.
Linearisierte
Strecke, PI-Tl-Regler,
-314
t+a3 -
Frequenz au! das Drei!ache
erhöht
Frequenz au! 1/3 reduziert
50
100
150
Bild 21. Abhängigkeit der Sprungantwort von der Oszillatorfrequenz bei PI-T1-Regler
(linearisierte Strecke). Llv = +0'05. e = 8. 10-4 für coo. a = 2·4.
Fall), muB
für ein befriedigendes Einschwingverhalten vergröBert werden.
Bei der Dimensionierung des Regiers muB natürlich die niedrigste Oszillatorfrequenz eingesetzt werden, damit auch bei dieser die Klirrfaktortoleranz eingehalten wird. (Dieses ist bei dem in Bild 21 dargestellten Fall nicht berücksichtigt worden.)
(X
1.5. Dynamisches V.erhalten
geregelter Oszillatoren mit schwach nichtlinearer
.~
Kennlinie
"
Verschiedentlich'wurde angegeben, daB eine geringe degressive Nichtlinearität der Oszillatorverstärkerkennlinie das dynamische Verhalten eines geregelten
Oszillators wesentlich verbessert, daB sogar nur auf diese Weise ein befriedigendes Einschwingverhalten zu erzielen sei (Oliver 8), Freshour 9), Bergmann 10)).
Aus der vorliegenden Analyse des Oszillators als Regelstrecke läBt sich dieses
erklären: Eine degressive Kennliniennichtlinearität führt zu einem regelungstechnisch leichter beherrschbaren TiefpaBverhalten der Strecke anstelle des
integralen Verhaltens linearer Oszillatoren. Das soIl am Beispiel des Van-derPol-Oszillators überschlägig abgeleitet werden.
-32Der Van-der-Pol-Oszillator
hat eine Verstärkerkennlinie
-114 = Vo + e
U3
der Form
(4) U
1- --;: U32
(69)
O
+
wie in Bild 5 dargestellt. Vo
eist die Kleinsignalverstärkung
für Û3 « Uo,
Vo die GroBsignalverstärkung
für û3 = Uo (die GroBsignalverstärkung
ist die
Sekante durch die Kennlinienpunkte
± t û3). Bei Vo = a (siehe Gl. (1» stellt
sich û3 = Uo als Gleichgewichtsamplitude
ein. Bei einer sprunghaften Änderung von Vo urn Llv reagiert die Amplitude û3 zunächst integral gemäû Gl. (28).
Jedoch verändert sich mit Û3 die Groûsignalverstärkung,
die für die be- oder
entdämpfende Wirkung der nichtlinearen Kennlinie maBgebend ist, urn
LlÛ3
Llvo ~ -2e -- .
(70)
Uo
Mit der aus Gl. (28) gedeuteten
integralen
LlÛ3(P) ~ -u;
( Llv(P)-
20'
Abhängigkeit
-2e LlÛ3(P) ) -1
o;
(71)
P
wird
Uo Llv
LlÛ3(P)
1
~2-;- 1 + ('t/e)p
(72)
Dieses Ergebnis stimmt formal überein mit Freshours Analyse und berücksichtigt wie diese nicht das nichtlineare Streckenverhalten
des Oszillators.
1.6. Ergebnis der Analyse
Die Anwendung von Gleichrichterschaltungen
zur Bildung eines amplitudenproportionalen Signals in konventioneller Arnplitudenregelungen
erzwingt einen
KompromiB zwischen Frequenzstabilität
bzw. Spektralreinheit
und Regeldynamik, der quantitativ dargestellt werden konnte. Diese Analyse erbrachte
genaue Dimensionierungsvorschriften
für optimierte Regler. Geringe Verbesserungen gegenüber dem Stand der Technik sind möglich durch Anwendung
nichtlinearer Elemente im Regier und durch Optimierung der ReglerkenngröBen. Die Ergebnisse der Reglersynthese zeigen, daB die Einführung einer
definierten Nichtlinearität
der Verstärkerkennlinie
nicht erforderlich ist, urn
ähnliche und bessere Ergebnisse wie Oliver 8), Freshour 9) oder Bergmann 10)
zu erzielen.
Eine wesentliche Verbesserung kann erst erzielt werden, wenn ein amplitudenproportionales
Signal ohne Überlagerung von Harmonischen
der Oszillatorschwingung erzeugt werden kann. Verschiedene Möglichkeiten wurden in der
Literatur angegeben, die jedoch nur sehr begrenzte Anwendbarkeit haben, da
sie an ganz spezielIe Oszillatorschaltungen
gebunden sind:
-
33-
Porter 22) beschreibt einen Oszillator, der aus zwei Integratoren und einem
Inverterverstärker
besteht. Dieser Oszillatortyp kanu frequenzunabhängig
zwei
urn n/2 in der Phase versetzte Spannungen (sin und cos) gleicher Amplitude
erzeugen. Nach
(û sin cot)2
+ (û cos cot)2
= û2
(73)
kann die amplitudenabhängige
Spannung ohne überlagerte Harmonische der
Oszillatorschwingung
erzeugt werden, wenn beide Ausgangsspannungen
quadriert und dann addiert werden. Der Grad der Befreiung von überlagerten
Harmonischen hängt von der Qualität der Quadrierschaltungen
ab. Die aufwendigen Quadrierschaltungen
umgeht Van Bokhoven 34) ebenfalls bei einem
Sinus-Cosinus-Oszillator
mit einer Achtphasengleichrichterschaltung,
bei der
nur Harmonische sehr hoher Ordnung mit sehr geringer Amplitude auftreten.
Diese Schaltungen haben alle den Nachteil, daB sie nur bei echten Sinus-Cosinus-Oszillatoren angewandt werden können, also Z.B. bei dem erwähnten Doppelintegrator-Oszillator
oder bei Oszillatoren aus zwei RC-AllpaBbrücken
und nur
unter der Bedingung, daB jeweils beide der zwei notwendigen Zeitkonstanten
parallel verstimmt werden. Besonders für die Anwendung von Oszillatoren als
MeBwertconverter ist diese Einschränkung nicht zulässig. Ein neues Verfahren,
bei dem das für die Regelung notwendige Amplituden-Istwertsignal
bei weitgehender Unterdrückung
der Harmonischen
mit Hilfe einer Abtastschaltung
gebildet wird, ist dagegen universell anwendbar bei allen Arten von Oszillatoren. Theorie und Realisierung werden im folgenden beschrieben.
-
34-
2. SCHNELLE AMPLITUDENREGELUNG
2.1. Amplitudenmessung
:MIT ABTASTVERFAHREN
mit AbtastjHalte-Schaltung
Die in Abschnitt 1 analysierten Schwierigkeiten bei der Realisierung von
Amplitudenregelungen entstehen, weil ein Amplitudenregier als Eingangssignal
die Schwingamplitude ständig benötigt, diese jedoch nur zu bestimmten Zeitpunkten als direkt meûbare elektrische Gröûe im Oszillator auftritt. Gewöhnlich wird vorausgesetzt, daf der arithmetische Mittelwert der Schwingung genügend genau der Amplitude proportional ist, was zur Anwendung von Mittelwertgleichrichtern mit Filterung führte (Abschnitt 1.3). Einmal pro Schwingungsperiode stellt jedoch der Augenblickswert der Oszillatorspannung die
Amplitude exakt dar: mit der Definition der Amplitude nach Gl. (21) ist nach
Gl. (7) zu dem Zeitpunkt der Maxima des Sinus
ui <PA -
U0
e-
Dt
-,
UA
(74)
CPA = rot + cp
= (2n
+ .t) n;
n
= 0, 1,2 ...
Bei Betragsbildung der Oszillatorspannung tritt diese Übereinstimmung sogar
zweimal pro Schwingungsperiode auf:
CPA= (n
+ t) n;
(75)
n
=
0, 1, 2 ....
Wird u jeweils zum Zeitpunkt des Maximums abgetastet und der Abtastwert
jeweils bis zum nächsten Abtastzeitpunkt gespeichert ("gehalten "), dann entsteht im Fall der stationären Schwingung ohne jede Filterung eine Gleichspannung, die gleich der Schwingungsamplitude ist *). Bei dynamischen Veränderungen der Amplitude entsteht eine Treppenspannung. Da jedoch die stationäre Schwingung der erstrebte Arbeitszustand des Oszillators ist, braucht
ein Amplitudenregier, dem die so gewonnene Spannung als Istgröûe zugeführt
wird, nicht mehr die in Abschnitt 1.3 (a) bzw. Abschnitt 1.4 (c) geforderten
Filtereigenschaften zu besitzen. Damit ist die Reglerdimensionierung nicht mehr
ein KompromiB zwischen guter Regeldynamik und geringem Klirrfaktor bzw.
hoher Frequenzstabilität!
Günstig für die Realisierung der erforderlichen Schaltung - einer sogenannten Abtast/Halte-Schaltung - ist, daû die abzutastende Funktion zu den
Abtastzeitpunkten eine horizontale Tangente besitzt. In der Umgebung des
Abtastzeitpunktes ändert sich die abzutastende Spannung nur wenig. Damit
reduzieren sich die Anforderungen an die Geschwindigkeit des Abtastvor.) Bei D ~ 0 tangiert die Hüllkurve die Schwingung allerdings nicht mehr exakt im Extremum (s. Abschnitt 2.2.1.2).
-
35-
ganges und an die Genauigkeit der Bestimmung des Abtastzeitpunktes. Letzterer
wird z.B. durch Bestimmung der N ulldurchgänge der differenzierten Oszillatorspannung gefunden.
2.2. RegIer für Oszillatoren
mit Abtast-Amplitudenmessung
Im Gegensatz zu den konventionell zur Amplitudenmessung benutzten zeitinvarianten Mittelwertgleichrichtern entsprechend Abschnitt 1 besitzen AbtastjHalte-Schaltungen infolge der Speichereigenschaft des Haltegliedes zeitvariante Eigenschaften. Gegenüber der in Abschnitt 1.3.2 gefundenen Beschreibung der Strecke nach Bild 6 ist eine Erweiterung um die Zeitfunktion
der Abtast/Halte-Schaltung notwendig. Sind die Zeitkonstanten des Systems
groB gegenüber dem Abtastintervall, dann kann nach 17) (Abschnitt 7.2.2)
oder 23) die Übertragungsfunktion des Abtast/Halte-Gliedes durch eine Totzeitfunktion mit dem halben Abtastintervall als Totzeit gut angenähert werden.
Bei einer integralen Strecke - die Linearisierung nach Abschnitt 1.4.1.3 wird
zunächst vorausgesetzt - kann auch bei Hinzufügen eines Totzeitgliedes mit
einem PI-Regler ausreichende Stabilität des geschlossenen Kreises erzielt werden. Eine Analogrechner-Simulation des Systems "integrale Strecke-Abtastj
Halte-Element-PI-Regler" zeigt, daB eine Reglerdimensionierung, die unter
Ersatz des AbtastjHalte-Elementes durch eine Totzeitfunktion berechnet wird,
zwar zu stabilem, nicht aber zu optimalem Verhalten führt.
Die Berechnung der optimalen Einstellung eines P 1- Regiers ist trotzdem ohne
groBen mathematischen Aufwand möglich. Der optimale stetige Regler läBt
sich, wie gezeigt werden wird, mit einigen Vereinfachungen aus einem zeitoptimalen Abtastregler ableiten.
2.2.1. Zeitoptimaler Abtastregler
Die Frage nach einer zeitoptimalen Regelung ist immer dann sinnvoll, wenn
mindestens eine GröBe im Regelkreis einer Beschränkung unterliegt. Das ist
normalerweise die StellgröBe. In diesem Fall jedoch ist der InformationsfluB
bezüglich der Rege1gröBe beschränkt: Infolge des Abtastprozesses wird die
Information über die RegelgröBe nur zu festgelegten Zeitpunkten erneuert. Hier
stellt sich daher die Aufgabe, aus den Abtastwerten der gestörten RegelgröBe,
dasjenige Stellsignal nach GröBe und Zeitdauer zu bestimmen, das die RegelgröBe in der kürzest möglichen Zeit - sinnvollerweise ein Abtastintervall auf den Sollwert zurückführt. Die Strategie, nach der ein Abtastamplitudenregler eines harmonischen Oszillators diejenige StellgröBe erzeugt, die zum
kürzesten Einschwingvorgang führt, wird im folgenden hergeleitet. Daraus wird
anschlieBend ein Abtastregler entwickelt.
2.2.1.1. Reglerstrategie
Vorausgesetzt wird, daB nach Gl. (75) jeweils während der beiden Extrem-
-
36-
werte der Sinusfunktion ein Abtastwert (sample) entnommen wird.
Eine Störung kann an der Wirkung erkannt werden, die sie in dem Zeitraurn
von ihrem ersten Auftreten bis zum nächsten Abtastzeitpunkt
ausübt. Die
unterschiedlichen Arten von Störungen können durch sprungartige Störungen
Llv des Verstärkungsfaktors
v des Oszillatorverstärkers
beschrieben werden:
impuisartige Störungen von v durch ein Paar zeitlich verschobener Llv-Sprünge
verschiedenen V orzeichens, sprungartige
Störungen der Oszillatorspannung
durch impuisartige v-Störungen. Von groBem Interesse sind Störungen, die
durch Verstellung eines der frequenzbestimmenden
Elemente hervorgerufen
werden. Im allgemeinen wird dabei die Kreisverstärkung des Oszillators sowohl
in der Phase (= gewünschter Effekt, Frequenzverstellung)
als auch im Betrag
(= Störung) verstellt. Die Betragsverstellung
kann isoliert von der Phasenverstellung betrachtet werden, wenn dabei die Veränderung der Regelstreckenparameter berücksichtigt wird. Die folgende Betrachtung beschränkt sich daher
auf v-Sprünge.
Eine sprungartige Störung Llv zu einem Zeitpunkt ts zwischen zwei Abtastzeitpunkten to und' t1 (to ~ ts < t1) ist für t ~ t1 in ihrer Wirkung identisch
mit der Wirkung zweier sprungartiger
Störungen Llvo und LlVl zu to und tI
(Bild 22). Denn für t ~ t1 ist nach Gl. (26)
Û =
im Fall zweier Störungen
Û =
Uo exp
ti; exp
(2~
Llv (t - ts) ).
(76)
entsprechend
(2~
[Llvo (tl - to)
+ (Llvo + Llv1)
TA sei das Abtastintervall (z.B. TA = t1 - to
der Störung gegenüber dem Abtastzeitpunkt
GIn (76) und (77) identisch, wenn
Llv
=
Llvo
=
Llvo
= nfwo)
(LIt
=
(t - t1)]).
(77)
und LIt die Verzögerung
ts - to). Dann werden
+ Llvi>
(1- ~~)
Llv,
(78)
.LIt
Llv1 = -Llv.
TA
Da die Amplitude ohnehin nur zu den Zeitpunkten to, ti> ... , tn gemessen
werden kann, kann eine StörungLlv zu einem beliebigen Zeitpunkt ohneweiteres
in zwei sich linear überlagernde Störungen zu dem ihr vorangegangenen
und
dem ihr folgenden Abtastzeitpunkt
nach GIn (78) zerlegt werden. Für die Synthese eines Abtastreglers bedeutet die Möglichkeit, alle Störungen auf Störungen zu den Abtastzeitpunkten
zurückzuführen, eine wesentliche Vereinfachung.
- 37/
/
_I
"-
q
""-,
•
t.v
t
,!
to
t,
I,
_I
i
d
~t.v,
t.v.
+
t
I
I.
I
"
Bild 22. Wirkungsweise einer Arnplitudenabtastschaltung;
tion Llv.
_I
Zerlegung einer Störsprungfunk-
Die Strategie eines Abtastreglers solI hergeleitet werden aus dem Fall "Störung des stationär schwingenden Oszillators durch eine sprungartige Störung
Llvo des Verstärkungsfaktors v zum Abtastzeitpunkt to". Wenn vorher die
Schwingung die Sollamplitude Uo besaB, also der Abtastwert UA bei t = to
-
(79)
war, dann ist nach Ablauf eines weiteren Abtastintervalls der Abtastwert bei
t = t1 nach Gl. (26)
UA1 =
u; exp (:.
TA
Llvo)-
(80)
Daraus IäBt sich die Störung ihrer GröBe nach ermitteln:
2.
Llvo
=-
(In UA1 -In
Uo).
(81)
TA
Auf der Kenntnis von GröBe (Llvo) und Zeitpunkt (to) der sprungartigen Störung fuBt die Strategie, nach der der Abtastregler die Störung in einer möglichst kurzen Zeit ausregelt:
-,38 -
die Störung muê. durch eine entgegengesetzt
gleich groBe StellgröBenänderung LluR = -Llvo/ks
kompensiert
werden ("permanente"
Regleraktion),
- die Schwingungsamplitude,
die inzwischen den Wert UA! angenommen hat,
muB durch eine geeignete StellgröBenfunktion auf den Sollwert Uo zurückgebracht werden ("vorübergçhende"
Regleraktion).
Die permanente Regleraktion besteht darin, daB die Differenz der Logarithmen
des Abtastwertes UA und des Amplitudensollwertes
Uo nach Gl. (81) entsprechend bewertet in einen akkumulierenden
Speicher eingespeichert wird und
somit permanent am Reglerausgang zur Verfügung steht. Das genannte Differenzsignal wird ebenfalls zur Bildung der vorübergehenden
Regleraktion herangezogen: Nach Gl. (80) ist
ti; =
UA!
exp
(2~
TA
(-Llvo))-
(82)
D.h., eine Ste11gröBenänderung von Llvo ist für die Zeitdauer TA' also über ein
Abtastinterva11 notwendig, urn die Schwingungsamplitude
von UA! auf den So11wert zurückzubringen.
Das nach Gl. (81) gewonnene Differenzsignal muB also
für die Dauer des jeweils nachfolgenden Abtastintervalls
(t! bis (2) festgehalten
und der gespeicherten permanenten
Regleraktion
überlagert werden. Diese
Strategie führt dazu, daB die Störung zwei Abtastperioden
nach ihrem ersten
Auftreten ausgeregelt ist.
LJ_(u
ol
û
""u' ,
.
...I....______L/f1 _.___
I,
t,
I,
t,
tJ
-I
-I
Stellgröpeniindenmg AURoks
-I
t,
I,
I,
-I
Bild 23. Strategie des Abtastreglers: Störung Llv zum Abtastzeitpunkt
to.
- 39In Bild 23 sind die Vorgänge, die eine sprungartige Störung zum Abtastzeitpunkt in einem nach dieser Strategie geregelten Oszillator auslöst, dargestellt.
Die Summe aus Störung und StellgröBenänderung zeigt, daB der zeitliche Vorsprung TA der Störung Llvo infolge der verzögerten Messung durch einen entgegengesetzten Impuls von derselben Fläche -Llvo TA kompensiert wird.
Bild 24 zeigt das Verhalten eines nach der beschriebenen Strategie geregelten
Oszillators bei einer zu einem beliebigen Zeitpunkt ts (to < ts < tI) beginnenden Störung Llv. Zu tI wird eine Regelabweichung gemessen, die auf der
Wirkung der Stör-Sprungfunktion Llv in dem Zeitintervall tI - ts, also nur
in einem Teil des Abtastzeitintervalls TA, zurückzuführen ist. Der Regier interpretiert diese Regelabweichung jedoch als verursacht durch eine scheinbare
Stör-Sprungfunktion Llvo zum Zeitpunkt to. Verfährt der Regier nach der beschriebenen Strategie, dann reicht die permanente Regleraktion nicht aus, urn
die Störung zu kompensieren, da die tatsächliche Störung LIv gröBer als die
interpretierte Störung Llvo ist. Zu t2 wird daher wiederum eine Regelabweichung
gemessen, die interpretiert wird als ob sie durch eine neue Störung Llv1 zum
Zeitpunkt tI verursacht sei. D'ie daraufhin eingeleitete Regleraktion überlagert
sich der nach tI eingeleiteten. Nach GIn (78) addieren sich Llvo und LlVI zu Llv,
so daB nach t3 der Sollwert wieder erreicht ist.
Û
,UA
t
u,
-I
I>v
-I
Bild 24. Funktion des Abtastreglers bei Störung zu einem beliebigen Zeitpunkt ts (to
< ts < tI)'
-40-
Cl
fly
_I
Bild 25. Funktion des Abtastreglers bei Störung der Amplitude.
Die Reaktion auf ei ne sprungartige Störung Llû in der Amplitude selbst, die
z.B. auch durch eine impulsartige Störung vone verursacht sein kann, zeigt
Bild 25. Die zu tI gemessene Regelabweichung
wird wieder interpretiert als
Folge eines v-Sprunges LI Vo zu to:
Llvo
21"
= -In
Uo
TA
+ Llû
ti;
(83
nach Gl. (80). Da tatsächlich aber keine Verstärkungsänderung
vorliegt, muBte
die permanente
Regleraktion
-Llvo unterbleiben. Nach der beschriebenen
Reglerstrategie findet zunächst eine Überkompensation
der Amplitudenstörung
statt. Diese wird zu t2 als neuerliche Stör-Sprungfunktion
-Llvo zum Zeitpunkt tI interpretiert, so daB der Sollwert zu t3 wiederhergestellt ist. Der Regler
reagiert also wie auf einen u-Störimpuls von der Dauer eines Abtastintervalls.
Mit einem Abtastregler, der nach der beschriebenen Strategie arbeitet, werden Störungen beliebiger Art zu beliebigen Zeitpunkten in maximal drei Abtastintervallen, also It Schwingperioden, ausgeregelt. Bei Oszillator-Abtastreglern,
bei denen die Abtastzeitpunkte
starr vorgegeben sind, ist dies es die theoretisch
kürzeste Ausregelzeit, da mindestens zwei Abtastwerte notwendig sind, urn
GröBe und Zeitpunkt der Störung zu bestimmen.
2.2.1.2. Fehler
aufgrund
von Näherungen
Bei der Reglersynthese wurde mit der Hüllkurvenfunktion
nach Gl. (21) bzw.
(26) gearbeitet. Die eingeschränkte Gültigkeit dieser Hüllkurvenfunktion
als
·--~--
-
"-~..---,----
-41Beschreibung für das Zeitverhalten der Amplitude der Schwingung bei nicht
konstantem v wurde inAbschnitt 1.3.2 untersucht. Danach gilt die Zerlegung
eines Störsprunges Llv gemäB GIn (78) nicht rnehr exakt für groBe Llv. Für den
Regler ist jedoch lediglich wichtig, ob er aus den gemessenen Amplitudenabweichungen die scheinbaren Störsprünge Llvo und LlVl richtig ermittelt, sowie,
ob die Regleraktionen die Schwingung im gewünschten MaBe beeinflussen.
Sowohl die scheinbaren Störsprünge als auch die Veränderungen der StellgröBe
ereignen sich jeweils zu den Abtastzeitpunkten, also zu Schwingungsphasen
CPA = (n t) n. Die Unstetigkeit der Hüllkurve bei diesen Schwingungsphasen, d.h. der Fehler, der bei der vereinfachten Betrachtung auftritt, wurde
aus Gl. (25) berechnet und in Bild 26 als Funktion von Llv aufgetragen. Danach ergeben sich erst für Werte !(1/2.w) Llv! > 0·1 merkliche Fehler. Sie
führen dazu, daB die Störung nach maximal drei Abtastintervallen nicht schon
wie im Idealfall ganz ausgeregelt ist. Erst bei (1/2.w) Llv ~ 0·5 erreicht dieser
Fehler und damit die nach drei Abtastintervallen noch übrigbleibende Regelabweichung die GröBenordnung 10%. Solange der Fehler unter 100% bleibt,
tritt keine Instabilität auf. Das ist für !(1/2.w) Llv! ~ 1 sicher der Fall.
Die Strategie des Abtastreglers kann so vervollkommnet werden, daB der
EinfluB von Gl. (25) berücksichtigt wird, daB also anstelle der vereinfachten
Hüllkurvenfunktion die Schwingungsgleichung selbst zugrunde gelegt wird.
Dies erscheintjedoch nicht ratsam, da mit der Komplexität der mathematischen
Beziehungen der Aufwand im Regler ganz erheblich wächst.
Ein anderer Fehler kann aus der Art resultieren, wie der Abtastzeitpunkt
ermitteIt wird. Es liegt nahe, diesen aus den Extrema der Oszillatorspannung u
zu bestimmen. Mit geringem Aufwand kann u differenziert und jeweils ein
Triggerimpuls bei jedem Nulldurchgang von duldt gebildet werden. Jedoch
stimmen die Extrema der Oszillatorschwingung mit den Extrema der Sinus-
+
2·0
1-5
u'
•
Û
It
t
1·0
0·5
0
0'01
0·1
rO
1_ b.vl_
1
2'tw
Bild 26. Lösungen der Gl. (25) für '" = 1tf2.
.
-42funktion, d.h. mit der vorausgesetzten Abtastphase <PA im nichtstationären
Schwingungszustand (Llv
=F 0) zeitlich nicht mehr genau überein. Mit unach
Gl. (7) ist
du
-
dt
=
Uo w e-Dt cos [(wt
+ q;) + Llq;]
(84)
~ - ~ .
(85)
mit D gemäB Gl. (6) und
LIq; = arctan ( - :)
Der Abtastzeitpunkt wird also urn è3t = átpko verschoben. Die relative Verschiebung des Abtastzeitpunktes beträgt damit
è3t
D 1
a-v
-~---=----=--Llv.
w
TA
2.-w
:It
1
:It
2.-w n
(86)
Sie führt zu einer Fehlmessung der Amplitude.
Wird der Abtastzeitpunkt aus den Nulldurchgängen der integrierten Oszillatorspannung u abgeleitet (Integrieren ist technisch weniger problematisch als
Differenzieren), dann kehrt LIq; lediglich sein Vorzeichen urn:
{Jf
TA
1
~ ---Llv.
(87)
2.-w:lt
Dazu kommt ein Fehler des Abtastintervalls aufgrund von Gl. (8). Die Halbperiode der Schwingung T/2 = n/w weicht vom gewünschten Abtastintervall
TA = nfwo ab urn
1
6t
[1-
(D/WO)2]1/2 -1 ~
1 ( D)2
2 -;;;-
1 ( Llv)2
20'(Qo .
=2
(88)
Die Fehler in der Dauer des Abtastintervalls führen zu Fehlinterpretationen
der Störung sowie zu fehlerhaften Regleraktionen. Als Folge davon bleibt auch
nach drei Abtastperioden noch eine geringe Regelabweichung. Prinzipiell
könnte auch dieser Fehler mit entsprechendem Aufwand im Regier behoben
werden. Die Simulation eines Oszillators mit Abtastregler wird jedoch zeigen,
daB das normalerweise nicht mehr notwendig ist.
2.2.1.3. Aufbau
und Dimensionierung
des Abtastreglers
Bild 27 zeigt das Blockdiagramm des Abtastreglers mit den ihm vorgeschalteten Elementen zur Gewinnung seines Eingangssignals. Eine Abtast/HalteSchaltung tastet den über eine Absolutwertschaltung (z.B. Zweiweggleichrichter) gebildeten Absolutwert der Oszillatorspannung lul während der Maxima ab und speichert den jeweiligen Maximalwert über die folgende Schwingungshalbperiode ( = Abtastperiode). Das Abtaststeuersignalkurze Impulse,
-43 -
Abtastregler
~DPUtLid.n..
Ablast/nalteoSthaltLing
r----------------l
LogoFLInkIIon
I
lu 1
vOrÜbergehende!' +
"Regleraktion
JLJlJL
TlIlr
Xomplementäres Abtaststeuersignal
Bild 27. Abtastregler.
die den Abtastschalter schlieûen - wird z.B. aus den Nulldurchgängen der
differenzierten oder integrierten Oszillatorschwingung hergeleitet (s. dazu Abschnitt 2.2.1.2). Das Abtastsignal UA wird logarithmiert (Logarithmusfunktion
gemäf Gl. (53) definiert), damit die Funktion Gl. (81) realisiert werden kann.
Diese Funktion ist identisch mit einem Sollwert-Istwert-Vergleich. Die Spannung Us am Sollwerteingang mull dem Logarithmus der Sollamplitude Uo
proportional sein:
Dann ist die Regelabweichung u; der Störung L1v proportional:
u,
kLl
= ---(In
Inb
UA
TA kLl
-In Uo) = ----L1v.
2.. Inb
(90)
Die Regelabweichung liefert - entsprechend bewertet - direkt die "vorübergehende" Regleraktion. Dazu addiert werden mull die "permanente" Regleraktion. Diese wird gebildet durch Aufsummieren (Akkumulieren) der in den
aufeinanderfolgenden Abtastperioden auftretenden U.- Werte. Der dazu erforderliche "analoge Akkumulator" besteht aus zwei Abtast/Halte-Schaltungen, die
zu einer Schleife zusammengeschaltet sind. Eine Summierschaltung addiert den
augenblicklichen us-Wert zu dem akkumulierten Wert aus der vorangegangenen
Abtastperiode. Unmittelbar nach AbschluB des Amplituden-Abtastvorganges
wird dieser Summenwert in eine Halteschaltung übernommen. Dazu wird der
dieser Halteschaltung zugeordnete Abtastschalter durch das komplementäre
Abtaststeuersignal gesteuert ("komplementäre Abtast/Halte-Schaltung"). Die-
-44ser Schalter ist also gerade dann geschlossen, wenn der Amplituden-Abtastschalter geöffnet ist, wenn sich also gegebenenfalls u. verändert. In diesem Zeitintervall wird der jetzt festgehaltene Summenwert in die zweite Halteschaltung
eingespeichert, deren Abtastschalter
synchron mit dem Amplituden-Abtastschalter arbeitet. Dieser alte Summenwert steht dann in der folgenden Abtastperiode für die neuerliche Addition gespeichert zur Verfügung.
Das Ausgangssignal der komplementären
Abtast/Halte-Schaltung
stellt die
"permanente"
Regleraktion dar. Der Bewertungsfaktor
ist identisch mit dem
der "vorübergehenden"
Regleraktion, der sich aus Gl. (90) ergibt. Dieser Bewertungsfaktor
sowie die Stellgliedkonstante
ks nach Gl. (15) werden durch
den Reglerparameter
v p (= Verstärkungsfaktor
des Reglers) in der StellgröBe UR berücksichtigt:
=
Vp
2
lnb
(91)
-7:Wo---.
ks kLl
n
Darin ist mit TA = nfwo vorausgesetzt,
abgetastet wird.
daB zweimal pro Schwingungsperiode
2
UA lUg
iu i/U,
-I
"ï'J
t
t:.v
-0,25
1,1----
-0,
~
I
r-
25
0.
-I
_
-I
Bild 28. Abtastregler.
10 = 0 (LIt = 0).
Einschwingvorgang
nach Störung Llv
=
0·25 zum Abtastzeitpunkt
--'- 452.2.1.4. Ergebnisse
der Simulation
Oszillator und Abtastregler nach Bild 27 wurden auf dem Analogrechner
simuliert. Die Ergebnisse dieser Simulation sind in den Bildern 28 bis 31 wiedergegeben:
Einschwingvorgang nach einer Störung Llv = +0·25 zum Abtastzeitpunkt
to = 0 (LIt = 0), Absolutwert der Oszillatorschwingung, Abtastsignal und
Stellgröûe (Bild 28);
eine Vergröûerung der Störung auf Llv = 0·5 läût die in Abschnitt 2.2.1.2 diskutierten FeWer erscheinen (Bild 29);
Vergleich der Einschwingvorgänge nach Störungen Llv = 0·25 mit LIt = 0
und LIt = 0·5 TA sowie Einschwingvorgang nach Störung der Amplitude
LlUA/UO = 0·3 (Bild 30);
Einschwingvorgänge nach Störungen Llv = ± 0·25, ± 0·5 zu LIt = 0,
0·25 TA' 0·5 TA' 0·75 TA (Bild 31).
AY
.~O·25
_t
Av a~O-5
-t
Bild 31. Abtastregler. Einschwingvorgänge
0·25 TA' 0·5 TA und 0·75 TA.
nach Störungen Llv =
± 0·25, ±
0·5 mit LIt
=
0,
-46 -
_I
....
,~
ir==='-W
-05
-io
Bild 29. Abtastregler.
= 0).
Einschwingvorgang
_I
nach Störung Llv = 0·5 zum Abtastzeitpunkt
(LIt
2
,___;:_ b
I
1
I
e
L
I
_I
'Mf
"'J
_[j_
~---'---------_--I
Q
(a) Einschwingvorgang
(b) Einschwingvorgang
(c) Einschwingvorgang
Bild 30. Abtastregler.
nach Störung Llv = 0·25 mit LIt = o.
nach Störung Llv = 0·25 mit LIt = 0·5 TA..
nach Störung der Amplitude LluA./Uo = -0·3.
-47 2.2.2. Optimaler stetiger RegIer
I
Mit einem Abtastregler wie beschrieben läBt sich die bestmögliche Dynamik
des Regelkreises erzielen, jedoch bei verhältnismäBig hohem Aufwand für den
Regler, wie Bild 27 zeigt. Es stellt sich die Frage, ob mit einfacheren Schaltungen
die Funktion des Abtastreglers zumindest näherungsweise
realisiert werden
kann.
Das Stellsignal ist aus zwei Anteilen zusammengesetzt:
einem vorübergehend
wirksamen und einem permanent wirkenden. Der erste Anteil ist mit dem proportionalen Verhalten eines stetigen Reglers identisch, seine Realisierung ist
also in jedem Fall trivial. Der zweite Anteil ist vergleichbar mit dem integralen
Verhalten eines stetigen Reglers. Es soll geprüft werden, ob der zu seiner Realisierung erforderliche "analoge Akkumulator"
durch einen einfachen Integrator
ersetzt werden kann.
In dem in Bild 23 skizzierten Sonderfall einer Störung Llv zum Abtastzeitpunkt to existiert bei angenommener idealer Funktion des Regiers eine Regelabweichung U. '" -L1v gemäB Gl. (90) in dem Zeitintervall tI bis ts- Ein Integrator, der den notwendigen permanenten Anteil des Ste11signals erzeugen soll,
muB mit u. als Eingangssignal in einer Abtastperiode TA auf UR = L1v/ks hochintegrieren (Bild 32). Zu diesem Integralanteil kann ein aus U. hergeleiteter
Proportionalanteil
von der GröBe 1·5 L1v/ks addiert werden. Das resultierende
Stellsignal hat dann im Intervall tI bis t2 zwar nicht die angestrebte Rechteckform, jedoch ist es mit dieser flächengleich. Da die Strecke integrales Verhalten
besitzt, ist die Wirkung identisch. Dieses gilt allerdings nur näherungsweise, da
das Verhalten der Strecke unter der Annahme kleiner Störungen bzw.langsamer
Veränderungen der Verstärkung analysiert wurde (Abschnitt 1.1.3.2). (Weiterhin
gilt die Fehlerbetrachtung
für den Abtastregler (Abschnitt 2.2.1.2) ebenso für
diesen Regler.) Für die Reglerdimensionierung
soll zunächst von dieser Näherung ausgegangen werden. Per Simulation am Analogrechner
soll dann die
Qualität dieser sehr stark vereinfachten Reglersynthese festgestellt werden,
Bild 33 zeigt im Blockdiagramm den PI-Regler mit den ihm vorgeschalteten
Elementen zur Gewinnung der Regelabweichung U•• Zur Berechnung der Proportionalverstärkung
des Regiers kann direkt auf Abschnitt 2.2.1.3, Gl. (91),
zurückgegriffen werden. Lediglich muB berücksichtigt werden, daB, wie oben
erläutert, der Proportionalanteil
im Stellsignal das l'5-fache desjenigen beim
Abtastregler betragen muB:
3
Vp
:re
lnb
o---·
= -7:W
(92)
ks kLl
Die Eckfrequenz os, des PI-Reglers ergibt sich aus der Vorschrift, daB der
Integralanteil nach Ablauf einer Abtastperiode TA = :re/wo (zwei Abtastungen
-48 pro Schwingungsperiode)
t des
Proportionalanteils
erreicht haben soU:
w,~~w,m,]
(93)
Für die Sollwerteinstellung gilt Gl. (89).
---I
\.....,.....,.,.,.,..,.,." U.
I,
Iz
LJ
_I
-l1v
---I
t
-1'Sl1v
---t
t
___I
Bild 32. Approximierung
der Funktion des Abtastreglers nach Bild 23 durch einen PI-Regler.
PI-Regler
r-------------.,
Alplllud.nAblasIIH.ll •• Schailung
log-FunkUDn
I
I
I
I
[u 1
I
I
u, I
I
I
I
I
IL
Bild 33. PI-Regler mit Abtastmessung
_J
der Amplitude.
-49 I
Spätestens aus der Dimensionierungsvorschrift für w" Gl. (93), wird deutlich, daI3 ein wesentlicher Unterschied zwischen diesem PI-Regler und dem
Abtastregler besteht. Die Funktion des Abtastreglers ist unabhängig von der
Oszillatorfrequenz Wo: Der Abtastregler arbeitet bei der angegebenen Dimensionierung optimal bei allen Frequenzen. Der stetigePI-Regler dagegen arbeitet
optimal nur bei der Frequenz, die der Dimensionierung der Reglereckfrequenz to;
nach Gl. (93) zugrunde gelegt ist, nämlich Wo mln. Bei Wo > Wo mln reicht die
kürzere Abtastperiode nicht mehr aus, um den benötigten Integralanteil aufzuintegrieren. Die Störung kann daher nach der im Optimalfall benötigten
Ausregelzeit von maximal drei Abtastperioden nach Auftreten der Störung
noch nicht vollständig ausgeregelt werden. Das führt dazu, daI3 die Regelabweichung asymptotisch mit exponentieller Hüllkurve abklingt. Bei
Wo
mln/3
< Wo < Wo mln
dagegen wird in der nun längeren Abtastperiode ein zu groI3er Integralanteil
aufintegriert. Das führt zu einem Überschwingen der Amplitude. Der Einschwingvorgang ist gedämpft periodisch mit der Periode 3TA- Im Grenzfall
Wo = Wo mln/3 wird durch die Störung eine ungedämpfte Schwingung der
Amplitude angeregt, wie durch eine Iterationsrechnung berechnet werden kann.
Bei Wo < Wo mln/3 schlieûlich wird durch eine Störung eine aufklingende
Regelschwingung angeregt. Wo = Wo mln/3 ist die Grenze des stabilen Regelverhaltens ! Befriedigendes Regelverhalten ist nur für Wo ;;;:: Wo mln gewährleistet.
Die Simulation eines in der beschriebenen Weise geregelten harmonischen
Oszillators am Analogrechner ergab die in den Bildern 34 bis 37 dargestellten
Einschwingvorgänge. Die Bedingungen sind jeweils identisch mit denen bei der
Simulation des Abtastreglers (Abschnitt 2.2.1.4, Bilder 28 bis 31). Dabei ist
Wo = Wo mln. Ergebnis: im Optimalfall Wo = Wo mln ist die Qualität des stetigen PI-Reglers nur unwesentlich schlechter als die des wesentlich aufwendigeren Abtastreglers.
Bild 38 zeigt den EinfiuI3einer Variation von Wo auf den Einschwingvorgang.
In Bild 39 ist die Ausregelzeit auf 10% in Abhängigkeit von Wo aufgetragen.
Deutlich wird hier, daI3 der Betriebsfall Wo < Wo mln nach Möglichkeit vermieden werden sollte. Im Betriebsbereich Wo > Wo mln wird zwar das Einschwingverhalten - bezogen auf das bei jeweils optimiertem Regier erreichbare, d.h. bezogen auf 2nlwo (Kurve a) - mit zunehmendem Wo immer ungünstiger. Absolut betrachtet jedoch - bezogen z.B. auf 2nlwo mln (Kurve b) sind die Ausregelzeiten etwa konstant. D.h., unabhängig von der Oszillatorfrequenz Wo sind Störungen in etwa drei Halbperioden der niedrigsten Betriebsfrequenz Wo mln auf 10% ausgeregelt. Für die Anwendung harmonischer Oszillatoren als MeI3gröI3enconverter kann ein solches, vo~ Momentanwert der
MeI3gröI3eunabhängiges dynamisches Verhalten sogar vorteilhafter sein als die
- absolut betrachtet - variable Dynamik bei Verwendung des Abtastreglers.
- 50-
__ I
'I"l
-0-25
__ I
-0-50
-0-251-----
_I
Bild 34. PI-Regler mit Abtastmessung. Einschwingvorgang nach Störung Llv
Abtastzeitpunkt to = 0 (LIt = 0).
=
0·25 zum
u,/U.
lu I/u.
t
--I
-I
Bild 35. PI-Regler mit Abtastmessung. Einschwingvorgang nach Störung Llv
Abtastzeitpunkt (LIt = 0).
=
0·5 zum
- 51Die Stabilitätsgrenze wurde bei wo/wo mln ~ 0·37 gemessen. Die Abweichung
vom theoretischen Wert 0·33 läBt sich auf die in Abschnitt 2.2.1.2 diskutierten
Fehler zurückführen.
2.3. Ergebois der Synthese voo Reglern mit AbtastschaItuogeo
Durch Anwendung von Abtastschaltungen zur Bildung des amplituden-proportionalen Istwertsignales entfällt gegenüber konventionell geregelten Oszillatoren die Notwendigkeit, durch einen geeigneten Reglerfrequenzgang Harmonische der Oszillatorschwingung zu unterdrücken. Die Reglerdimensionierung ist nicht mehr ein KompromiB zwischen Regeldynamik und Frequenzkonstanz bzw. Spektralreinheit. Der Regier kann optimal auf das Streckenverhalten abgestimmt werden, ohne daB dadurch Frequenzkonstanz oder Spektralreinheit im eingeschwungenen Zus tand leiden. Das theoretische Optimum an
Regeldynamik wird mit einem Abtastregler erreicht. Störungen beliebiger Art
werden unabhängig von der Oszillatorfrequenz im ungünstigsten Fall in nur
drei Halbperioden der Oszillatorschwingung bis auf eine geringe Restregelabweichung ausgeregelt. Aus diesem relativ aufwendigen Regier wurde ein stark
vereinfachter stetiger Regler, ein PI-Regler, abgeleitet. Mit diesem kann bei der
der Reglerdimensionierung zugrunde gelegten minimalen Betriebsfrequenz des
Oszillators das Verhalten des Abtastreglers gut angenähert werden. Im gesamten
2
,a
c
f-""___'
b
r
t
L
1
_I
'I"
.o-s~~
-o-s
I"'J;;J=l----------I
b
a
Bild 36. PI-Regler mit Abtastmessung. ~
nach Störung Llv = 0·25 mit LIt = O.
nach Störung Llv = 0'25 mit LIt = 0·5 TA.'
(c) Einschwingvorgang nach Störung der Amplitude LluA./Uo = -0,3.
(a) Einschwingvorgang
(b) Einschwingvorgang
- 522
flv.'.!:Q·2S
-I
-I
Bild 37. PI-Regler mit Abtastmessung. Einschwingvorgänge
und ± 0·5 mit LIt = 0, 0·25 TA' 0·5 TA und 0·75 TA.
±
0.25
=±
0·25
nach Störungen Llv =
2
3Womln
Womln
i-Womln
-t
Bild 38. PI-Regler mit Abtastmessung.'rEinschwingvorägnge
(LIt = 0) bei verschiedenen Oszillatorfrequenzen.
nach Störung Llv
- 53~o
t
-
21t
"'Omln
I,-·_
I
21t
5
3
2
1 .
2
4
8elriebs
- Frequenzbereich
des Oszillalors
-'_
inslabil
periodisch.
V.rhalten
aperiodisches
Verhalten
Oplimalbedingung
Bild 39. Ausregelzeit der Regelabweichung auf 10 % bei variabIer Frequenz bezogen auf
2'/'(,/000 mln (b).
Frequenzbereich des Oszillators werden Ausregelzeiten von etwa drei Halbperioden der minimalen Betriebsfrequenz erreicht.
Das Einsatzgebiet des aufwendigen aber optimalen Abtastreglers werden
MeBgeneratoren sein, bei denen die Frequenz sehr schnell umgeschaltet werden
so11 oder die sehr niedrige Frequenzen erzeugen sollen. Der stetige Regier ist
wegen seines geringerenAufwandes und wegen seiner von der Oszillatorfrequenz
annähernd unabhängigen Regeldynamik vorteilhaft für Meûgröûenconverter.
-
54-
3. REALISIERUNG EINES OSZILLATORSYSTEMS
ABTASTREGELUNG
MIT
Extrem schnelle Amplitudenregelungen harmonischer Oszillatoren sind - wie
schon einleitend ausgeführt - für verschiedene Anwendungsgebiete interessant:
für Tiefstfrequenz-Sinusgeneratoren, bei denen die Einschwingzeiten üblicher
Amplitudenregelungen nicht mehr akzeptabel sind, für programmgesteuerte
Niederfrequenz-Sinusgeneratoren, bei denen Spektralreinheit trotz schneller
Frequenzumschaltung erforderlich ist, und für MeBgröBenconverter, die schnell
veränderliche amplitudenanaloge elektrische MeBsignale in frequenzanaloge
Signale umformen sollen. Da die zuletzt genannten Converter entscheidende
Komponenten neuartiger ProzeBinstrumentierungssysteme sind und als solche
AnlaB zu der dieser Arbeit zugrundeliegenden Untersuchung gaben, wird die
nachfolgend behandelte Realisierung einer Amplituden-Abtastregelung sich auf
diesen Anwendungsfall konzentrieren. Die dort erarbeiteten Techniken können
jedoch zum Teil auch bei MeBgeneratoren angewandt werden.
3.1. Anwendung harmonischer
Oszillatoren
als Me8grö8enconverter
Eine wesentliche Anwendung der elektrischen MeBtechnik ist die MeBwert- .
erfassung und -verarbeitung in industriellen Prozessen. In konventionell analog
arbeitenden Systemen treten bei wachsenden räumlichen Ausdehnungen der
Anlage und gleichzeitig wachsenden Ansprüchen an die Meêgenauigkeit und
-zuverlässigkeit Übertragungsprobleme und - bei Einbeziehung von Digitalrechnern - Anpassungsprobleme auf. Einen Weg, diese Probleme zu umgehen,
weist die Frequenzanalogie-Technik 1.24.30). Frequenzanaloge Signale können
mit geringem Aufwand sehr störsicher übertragen werden und mit einfachen
Zählschaltungen digitalisiert werden. Die entscheidende Komponente frequenzanaloger Systeme ist der MeBgröBenconverter, der - möglichst "vor Ort" die analoge, meist nichtelektrische MeBgröBe, in ein frequenzanaloges Signal
umformt. Solche Converter sind grundsätzlich steuerbare Oszillatoren - steuerbar unmittelbar durch die MeBgröBe oder durch eine über einen konventionellen MeBaufnehmer erzeugte analoge elektrische Zwischengröûe. Bei der Auswahl des geeigneten Oszillatorprinzips ist - trotz Fortschritten bei Relaxationsoszillatoren 25) - der harmonische Oszillator favorisiert, wenn es um die
Erreichung höchster MeBgenauigkeit bei rauhen Umweltbedingungen geht.
Hohe, garantierte Meûgenauigkeit ist u.a. notwendig bei Meûgeräten, die der
behördlichen Eichpflicht unterliegen, so z.B. bei industriellen Wägeanlagen. Mit
dem auf einem harmonischen Oszillator basierenden Converter FALCON *)2.3)
der für die Zusammenschaltung mit DehnungsmeBstreifen(DMS)-Kraftme13zeIlen konzipiert wurde, konnte die erforderliche MeBgenauigkeit erreicht wer.) FALCON
=
Frequency Analog Loadcell CONverter.
- 55den. Die in konventioneller Art ausgeführte, fürdas Converterprinzip sehrwichtige Amplitudenregelung des Oszillators führte zu einer verhältnismäBig geringen MeBdynamik. Bei Ausgangsfrequenzen um 1 kHz lag - wie nach
Kapitel 1 zu erwarten - die Grenzfrequenz des Umformungsprozesses bei
1 Hz. Für eine Reihe von Anwendungsfällen ist dieses träge Verhalten sehr
nachteilig. Vor allem, wenn das MeBverfahren Teil einer geschlossenen Regelschleife ist, können seine zeitvarianten Eigenschaften zusätzliche Stabilitätsprobleme bringen, so z.B. bei Dosier-Wägeprozessen. In anderen Fällen ist der
zeitliche Verlauf schnell veränderlicher MeBgröBen interessant. In Zusammenhang mit dem FALCON-Verfahren ist das sog. "dynamische Wägen" wichtig:
Die zu wägende Masse - z.B. ein Eisenbahnwaggon - ist in Bewegung und
befindet sich nur so kurz auf der MeBplattform, daB die unvermeidbaren Einschwingvorgänge des Feder-Masse-Systems noch nicht abgeklungen sind. Aus
der Analyse der Übergangsfunktion solI dann auf den stationären Zustand geschlossen werden. Aus Anwendungen dieser Art ergab sich der Wunsch nach
einem "schnellen" FALCON.
3.2. Converterkonzept
Beim FALCON-Prinzip wurde die Umformung der sehr kleinen DMSBrückenverstimmung (maximal lû=") in eine groBe Frequenzvariation in zwei
Schritten durchgeführt. Zunächst wird ein harmonischer RC-Oszillator durch
nur einen elektrischen Parameter - hier ein ohmseher Leitwert - linear in der
Frequenz verstimmt. Dieser Parameter bestimmt aber gleichzeitig einen Kompensationsstrom (oder eine Kompensationsspannung), der die durch die MeBgröBe verursachte Brückenverstimmung kompensiert. Über einen Kompensationsregler wird der die Oszillatorfrequenz und die Kompensationsgröûe
steuernde Parameter entsprechend eingestellt. Bei erfolgter Kompensation ist
Frequenz- und Brückenverstimmung streng miteinander verkoppelt.
Dieses Prinzip hat zwei wesentliche Vorteile: Die MeBelemente (DMS- Widerstände) sind nicht direkt Teil des frequenzbestimmenden Oszillatornetzwerkes,
wie es z.B. von Hinkelmann und Ihme 26) vorgeschlagen wird. Blindkomponenten (Streukapazitäten, Kabelkapazitäten usw.), die leicht Brückenverstimmungen in der GröBenordnung des Meûeffektes hervorrufen können, haben daher
keinen unmittelbaren Einfluf auf die Frequenz. Andererseits wird die Verkopplung von Frequenz und Brückenverstimmung - also die Umformungskennlinie - nahezu ausschlieBlich von einigen wenigen passiven Bauelementen bestimmt, so daB die Einflüsse aktiver Bauelemente mit ihren nichtkonstanten
Parametern weitgehend eliminiert sind. Das wird durch drei MaBnahmen erreicht: extrem starke Gegenkopplung über alle Verstärker, Anordnung der
steuerbaren Elemente (Stellglieder für Frequenz und Amplitude) innerhalb von
Regelkreisen, Vermeidung von kleinen Gleichspannungssignalen durch Wechselspannungsspeisung der MeBbrücke.
- 56Das Grundprinzip des Converters solI dieser Vorteile wegen beibehalten werden. Die Anwendung der in Kapitel2 entwiekelten Amplitudenregelungsprinzipien auf das FALCON-Prinzip hatjedoch eine Reihe von Konsequenzen auf die
Konzeption und auf die Schaltungstechnik des Converters. Insbesondere betrifft
das die Funktionsweise des Oszillators selbst, die Rücksicht nehmen muB auf
die technischen Möglichkeiten zur Realisierung von trägheitslosen und linearen
StelIgliedern für Kreisverstärkung und Phase, d.h. für Amplitude und Frequenz.
Dem Abschnitt 3.3.1 solI hier insofern vorgegriffen werden, als sich bei der
Suche nach geeigneten Stellgliedern elektronische Multiplizierverfahren am geeignetsten erwiesen haben. Mit diesen konnten steuerbare Abschwächer (steuerbare Potentiometer) und einseitig mit dem Bezugspotential verbundene steuerbare Widerstände mit den erforderlichen Eigenschaften realisiert werden.
Der in Bild 40 skizzierte Oszillator eignet sich für die Anwendung derartiger
StelIglieder. Er besteht (Bild 40a) aus einem Allpaf 1. Ordnung mit nachgeschaltetem Differenzverstärker, einem Potentiometer und einem Integrator.
Während die Phasendrehung des Integrators frequenzunabhängig -n/2 beträgt,
variiert die Phasendrehung des AlIpasses frequenzabhängig zwischen 0 und +n.
All pan
Verstärker
Potentiometer Integrator
al
bl
cl
Bild 40. Allpaûoszillatorschaltung.
- 57PhasenmäBig ist die Schwingbedingung
erfü11t bei der Frequenz, bei der die
AllpaBphasendrehung
+n/2 ist. Das ist nur der Fall bei Wo = I/7:A' worin 'OA
die Zeitkonstante des AllpaBgliedes ist. Im Gegensatz zum Phasenverhalten
ist
der Allpaû-Übertragungsfaktor
frequenzunabhängig
t, die Verstärkung des
Integrators jedoch frequenzabhängig
("" I/wo). Der Ubertragungsfaktor
m des
Potentiometers,
mit dem die Schwingbedingung hinsichtlich der Kreisverstärkung eingestellt werden muB, muB im stationären Schwingungsfall deshalb
proportional zu Wo sein.
Mit der Übertragungsfunktion
der einzelnen Elemente des Oszillatorkreises
läBt sich dieser Sachverhalt formelmäBig finden:
(94)
AllpaB:
Verstärker
und Potentiometer:
Fv =
VA
m =
(95)
V,
1
F[=-.
Integrator:
(96)
p7:[
Allpaf und Integrator können als frequenzbestimmendes
chend Abschnitt 1.1, Gl. (1) aufgefaBt werden:
Der Koeffizientenvergleich
Netzwerk
entspre-
mit Gl. (1) ergibt
(98)
1
7: = 2'O[
1
+ l/cv
z
z
= 'O[ bei
cv = wo,
(99)
'OA
(100)
Im stationären
Schwingungsfall
muB a
=
V
sein und damit
(101)
Aus der Prinzipschaltung
Bild 40b wurde die für die Realisierung günstige
Schaltung Bild 40c entwickelt, bei der ein in der Realisierung aufwendiger
- 58Differenzverstärker mit konstanter Verstärkung
Schaltung ist
VA
umgangen wird. In dieser
1:A= RA CA'
1:1 = RI Cl'
VA = -2,
(102)
unter der Bedingung R; = R2• (Die Phasenumkehrung von VA wird durch einen
Umkehrverstärker, der dem Potentiometer folgt, rückgängig gemacht.) Die
variablen Parameter sind RA und m.
Zwei Möglichkeiten bietet diese Schaltung, die Frequenz linear durch nur
einen der variablen Parameter zu steuern:
(1) Unmittelbare Steuerung der Frequenz durch RA- Mit GIn (98) und (102) ist
Wo
10=-=---'
2n
1
1
(103)
2n CA RA
In diesem Fall muB eine Amplitudenregelung durch Verstellung von m die
Bedingung für stationäre Schwingung Gl. (101) herstellen.
(2) Mittelbare Steuerung der Frequenz durch m. Die Amplitudenregelung stellt
in diesem Fall über RA den stationären Schwingungsfall her. Mit den GIn
(101), (102) und (98) ist bei stationärer Schwingung
m
1:1
=- =
1:1 Wo
= 2n1:Ifo.
(104)
'rA
Das heiBt, die Amplitudenregelung stellt diejenige Frequenz ein, bei der die
Integratorverstärkung die Potentiometerabschwächung gerade aufhebt *).
Dazu muB fo proportional zu m verändert werden.
Diese zweite Möglichkeit wird für die Umformung der Brückenverstimmung
in eine Frequenz genutzt (Bild 41) 35). Der Oszillator aus Bild 40c stellt zwei
Spannungen zur Verfügung (uo und -m uo), deren Verhältnis nach Gl. (104)
der Oszillatorfrequenz proportional ist. Uo soll die Oszillatorausgangsspannung
sein, deren Amplitude durch den Amplitudenregier konstant gehalten wird. Mit
Uo wird auch die MeBbrücke gespeist. Deren Ausgangsspannung
LlR
Llu= uo-
(105)
R
wird verstärkt (VB)' Bei entsprechender Einstellung von m kann Llu VB durch
Uo kompensiert werden. Dazu wird die Summe dieser beiden Spannungen
einem integral wirkenden Regier zugeführt, der m stellt: Mit
-m
LIu VB
-
m
Uo
=0
(106)
*) Obwohl der Regier die Frequenz stellt, handelt es sich nicht urn einen "Frequenzregler",
denn er stellt die Frequenz, urn die Amplitude konstant zu halten.
- 59-
f .. tlR
I R
I
I
KompensationsRegier
J
uRK
Bild 41. LlR/f-Converter mit Allpaû-Oszillator,
wird
LlR
(107)
m=-vB,
R
d.h., mit Gl. (104)
VB
fa = 2nR[C[
LlR
R
(108)
Bei erfolgter Brückenkompensation wird Proportionalität zwischen Oszillatorfrequenz und Brückenverstimmung unabhängig von der Steuerkennlinie des
Potentiometers m erzwungen.
3.3. StelIglieder für Verstärkung und Phase
Die Realisierung dieses Converterkonzeptes wird, wie oben bemerkt, wesentlich beeinfluBt durch die Beschaffenheit der Stellglieder für die steuerbaren
Parameter RA und m. Daher wird im folgenden zuerst über die Stellglieder berichtet.
Aufgabenstellung:
Stellglieder im Sinne der Aufgabenstellung sind ohm'sche Widerstände, deren
Widerstandswert durch ein elektrisches Signal gesteuert werden kann, oder
Spannungsteiler, deren Abschwächung durch ein elektrisches Signal gesteuert
werden kann. Sie sollen den folgenden Anforderungen genügen:
- 60-
Die Signalkennlinie (StromjSpannungs-Kennlinie) muB linear sein. Eine
Nichtlinearität würde u.a. die Harmonizität der Oszillatorschwingung stören und Einflüsse auf die Frequenz haben. Nach Abschnitt 1.4.1 sollte
e < 10-2 sein.
- Die Signalübertragungsfunktion muB frequenzunabhängig sein. Frequenzabhängigkeiten, d.h. Phasendrehungen, stören die lineare Umformungskennlinie nach GIn (103) bzw. (104) und (108). Das Verhältnis der Oszillatorfrequenz zur Grenzfrequenz des Stellgliedes (Zeitkonstante von RA oder
Bandbreite von m) muB etwa dem zulässigen Linearitätsfehler entsprechen,
d.h. Jg F:::i 10 MHz.
- Die Steuerung muB mit geringer Verzögerung arbeiten. Damit die mit Abtastreglern erreichbaren kurzen Ausregelzeiten realisiert werden können,
muB die Steuerzeitkonstante klein gegen die Abtastperiode sein (-Cs« 1 ms).
- Die Steuerkennlinie sollte näherungsweise linear und reproduzierbar sein.
Anderenfalls wird zwar die Umformungskennlinie des Converters nicht
nachteilig beeinfluBt, wohl aber das Regelungsverhalten.
Von den zahlreichen möglichen und zum groBen Teil untersuchten Verfahren
zur Realisierung der gewünschten Stellglieder scheiden die meisten aus, weil sie
eine oder mehrere dieser Bedingungen nicht erfüllen.
Elektromechanisch betriebene Potentiometer:
Träge und verschleiBbehaftet.
Fremdgeheizte NTC- und PTC-Widerstände:
Träge (-Cs ~ 1 s) und nichtlineare Steuerkennlinie, eventuell auch nichtlineare Signalkennlinie durch Sperrschichteffekte.
Optoelektronische Komponenten (PhotowiderstandjLumineszenzdiode):
Träges Verhalten des Photowiderstandes (-Cs F:::i 10 bisIûû ms abhängig von
der Vorgeschichte), stark nichtlineare und schlecht reproduzierbare Steuerkennlinie sowohl der Lumineszenzdiode als auch des Photowiderstandes. Komponenten dieser Art wurden erfolgreich im alten FALCON-System eingesetzt. Die
dort angewandte konventionelle Amplitudenregelung wurde dadurch nur graduell verschlechtert; in bezug auf ihre Stabilität war sie jedoch kritisch.
Magnetoelektronische Komponenten (FeldplattejElektromagnet):
Schwierig zu realisieren ist die notwendige groBeFeldstärke (groBesVolumen)
und eine schnelle Veränderung des Feldes (hohe Steuerströme).
Getastete Widerstände 27):
Sehr aufwendige Steuerschaltungen, da bei der erforderlichen Oszillatorgenauigkeit Schaltzeiten im ns-Bereich erreicht werden müssen.
- 61Feldeffekttransistoren 28):
Nichtlineare Signalkennlinie bei Signalspannungen
Steuerkennlinie.
> 100 mV. Nichtlineare
Multiplizierspaltungen:
Auch Multiplizierschaltungen sind StelIglieder im Sinne der Aufgabenstellung. Sie können als steuerbare Potentiometer aufgefa13twerden. In einer Rückkopplungsschaltung betrieben, können mit Multiplizieren in bekannter Weise
auch steuerbare Widerstände gebildet werden. In Bild 42a ist ein Multiplizierer
mit der Charakteristik
_
US!
m----
*)
(109)
US! max
über einen Widerstand R rückgekoppelt. Der in den Eingang hineinflieûende
Strom ie wird darm bestimmt durch die über R liegende Spannung:
1
ie
=R
t»,-
1
Ua)
= - Ue (I R
(110)
m),
R
t
u.
I
al
US!
bI
US!
Bild 42. Realisierung steuerbarer Widerstände mit Multiplizierern.
Spannungsausgang; (b) Multiplizierer mit Stromausgang.
*) Der Multiplizierer
(a) Multiplizierer
mit
wird hier als gesteuertes Potentiometer aufgefaf3t. Die normalerweise
gleichberechtigten Eingangsspannungen (oft mit Ux und u)I bezeichnet) spielen hier die
unterschiedlichen Rollen "Signalspannung lie" und "Steuerspannung liSt".
-
62-
so daB zwischen den Eingangsklemmen ein Leitwert
1
ie
1,
-=-=-(l-m)
R*
u;
(111)
R
erscheint. Noch einfacher zu realisieren ist dieses mit Multiplizierschaltungen,
deren Ausgang Stromquellencharakter hat:
ia =-Ue-;
m
Ust
m=---.
Rm
(112)
USt max
In der Beschaltung nach Bild 42b ist ie
=
-ia, so daB
m
1
-=-=-.
(113)
R*
Normalerweise liegt R* einseitig an dem Bezugspotential der Schaltung.
Die herkömmlichen Multiplizierverfahren sind allerdings für diese Aufgabe
auch nicht geeignet. Sie haben entweder eine zu niedrige Grenzfrequenz (timedivision-multiplier) oder eine zu geringe Kennlinienlinearität (Parabelmultiplizierer). Injedem Fall sind sie sehr aufwendig. Vor wenigen Jahren wurde jedoch
von Gilbert 29) ein neues Multiplizierverfahren publiziert, die "Stromverteilungssteuerung" (engl.: current gain cell). Bei diesem Verfahren wird über
die logarithmische UBE/ic-Kennlinie des Sperrschichttransistors logarithmiert
und delogarithmiert und so die Multiplikation auf eine Addition zurückgeführt.
Begünstigt durch die sehr progressive Entwicklung der Halbleitertechnologie,
speziell der Technologie der integrierten Schaltungen, wurde dieses Prinzip in
den letzten Jahren zur technischen Reife entwickelt.
Handelsübliche Multiplizierer erreichen zwar heute noch nicht die hier geforderten Spezifikationen hinsichtlich Bandbreite oder Linearität. Mit einer von
Kuijk 32) entwiekelten integrierten Schaltung wurde jedoch ein Multiplizierer
aufgebaut, der den Anforderungen genügt. Die integrierte Schaltung arbeitet
nach einer neuartigen Modifikation des Gilbert'schen Prinzips. Sie enthält alle
die Transistoren, die hinsichtlich der Gleichheit ihrer Parameter kritisch sind.
Die zum Betrieb dieser Schaltung notwendigen Schaltelemente, insbesondere die
strombestimmenden Widerstände, wurden inDickfilmtechnik realisiert (Bild 43).
Diese Hybrid-Schaltung hat einen Stromquellenausgang mit der Charakteristik
ia = ue-
m
Rm
m=- 1 ( 1
2
1n; =
UR) .
+8V '
(114)
16·5kn.
Im Gegensatz zu den üblichen Vier-Quadrant-Multiplizierern dieser Art handelt es sich urn einen Zwei-Quadrant-Multiplizierer: Der Multiplikand m kann
sein Vorzeichen nicht wechseln. Das Ist für die vorliegende Anwendung nicht
-- 63-
US!
+~~------~-+~
u•
. Bild 43. Multiplizierer-Hybridschaltung
mit integrierter Schaltung (IC) nach Kuijk 32).
nachteilig. Die Dickfilm-Hybrid-Schaltung erreicht bezüglich des Signalpfades
eine Grenzfrequenz von etwa 10 MHz und einen Klirrfaktor von unter 0·2 %
in einem Ausgangssignalbereich von mindestens 1 : 1000. Die weit weniger
kritische Steuercharakteristik weist eine Nichtlinearität in der Gröûenordnung
1 % und eine Grenzfrequenz imMHz-Bereich auf. Damit sind dieAnforderungen
an die SteUglieder erfüllt.
3.4. Realisiemng des Oszillators
Mit den beschriebenen Multiplizierern wurde der in Bild 44 dargestellte Oszillator konzipiert. Aufgrund der Erfahrungen mit dem Vorgänger dieses Converters (FALCON) wurde die Frequenzvariation auf 1 kHz beschränkt. Die
untere Frequenzgrenze soUte mit Rücksicht auf die Regeldynarilik nicht zu
niedrig sein, so daû der Frequenzbereich auf Jo = O' 5 ... 1·5 kHz festgelegt
wurde.
Die Dimensionierung ergibt sich aus der Charakteristik der Multiplizierer
(Gl. (114)). Die Multiplizierer sollen nur in einem Teilbereich IURI ~ t IURlmax
ihrer Steuerkennlinie ausgefahren werden, damit für Überschwingen der Regelung genügend groûe Reservebereiche bleiben. Aus Gl. (104) wird bei einem
Multiplizierer MI mit Stromquellenausgang vor dem Integrator
-
Is=
Mit Cl
64-
m
1
m
=---2n RI Cl
2n Cl Rill
(115)
= 5 nF wird nach Gl. (114) die Steuerkennlinie des Oszillators
fo =
1 (1 + ;R;)
kHz
(116)
Derselbe Steuerspannungshub solI für den Multiplizierer MA geIten, der den
AIIpaBwiderstand RA entsprechend Bild 42b ersetzt. Mit GIn (89) und (113) ist
fo
und bei
CA = Cl =
=
1
2n Ca
1
= ---RA
2n
m
(117)
CA Rill
5 nF
fo =
10
3
S-1
(1 + ;R~)
(118)
Vorausgesetzt, die Steuerkennlinien der beiden Muitiplizierer MA und MI sind
exakt gleich, dann ist im stationären Schwingungszustand URA = URK• Das
eröffnet die sehr vorteilhafte MögIichkeit einer StörgröBenaufschaltung (feed
forward) im Amplitudenregelkreis: Der Kompensationsregier steuert gleichzei tig mit MI auch MA an, so daB der Amplitudenregier im Idealfall nur noch
die Amplitudenstörungen auszuregeln hat. Die Störungen in der Kreisverstärkung dagegen sind umso stärker reduziert, je besser die Steuerkennlinien der
Multiplizierer übereinstimmen. Die Verbesserung des dynamischen Verhaltens
des Gesamtsystems durch diese MaBnahme wird später diskutiert. Zur Stör-
Cr
-ua'"
Bild 44. Oszillator.
gröBenaufschaitung
wird
URK
65-
über
den Differenzsteuereingang
des Multipli-
zierers MA von URK subtrahiert.
Bei einem Stromquellenausgang
des dem Integrator vorgeschalteten Multiplizierers ist ein Integrationswiderstand
für die Funktion des Oszillators an sich
nicht notwendig. Jedoch wird für die Brückenkornpensation
die frequenzproportionale Spannung -m Uo benötigt. Zur Erzeugung dieser Kompensationsspannung dient der Widerstand Rn an dem die Spannung
UK
=
RI
RI
ia
=- -
m Uo
Rn!
=
-21'&10
RI Cl Uo
(119)
abfällt (nach GIn (112) und (115)).
Am Ausgang des Integrators kann eine rnit Uo betragsgleiche Spannung Uo*
abgegriffen werden, die gegenüber Ua frequenzunabhängig
eine Phasendrehung
von 1'&/2 besitzt.
Die Phasendrehung der Verstärker im Oszillator muB im Bereich der Oszillationsfrequenz vernach1ässigbar sein. Entsprechend wurden breitbandige Operationsverstärker
gewäh1t. Einzelheiten
der Frequenzgangkompensation
und
Spannungsversorgung
wurden aus Gründen der Übersichtlichkeit bei dieser und
bei allen folgenden Schaltungsdarstellungen
fortgelassen. Die maBgeblich die
Umformungskennlinie
des Converters bestirnmenden Komponenten sind durch
gröBere Strichstärke
gekennzeichnet.
3.5. Amplitudenregelung
Die Realisierung des Amplitudenregiers soll sich auf den "optimalen stetigen
Regier mit Abtastschaltung zur Arnplitudenmessung"
beschränken. Wie schon
erwähnt, ist bei MeBgröBenconvertern die von der Oszillatorfrequenz näherungsweise unabhängige Regeldynamik gerade vorteilhaft, so daB der Mehraufwand
für eine konsequente Abtastregelung nicht notwendig ist.
3.5.1. Berechnung der Reglerdimensionierung
Die Dimensionierungsregeln
für einen Regier mit Abtastschaltung
sind in
Abschnitt 2.2.2 angegeben. Es handelt sich urn einen PI-Regier mit der Proportionalverstärkung
gemäB Gl. (92):
3
In b
Vp = -'rWo---
1'&
und der Eckfrequenz
ks kLl
gemäB Gl. (93)
OOr
2
=31'&
Womln·
.
-
66-
Darin sind
gemäB Gl. (99),
gemäB Gl. (98).
Der Stellkoeffizient ksist nicht unmittelbar zu bestimmen, da die Oszillatorkreisverstärkung
v mittelbar durch Veränderung der AllpaBzeitkonstante
'iA
verstellt wird. Nach GIn (95) und (101) ist
2'i]
v=vAm=-.
(120)
'iA
Mit Gl. (113) wird
1
1
-=---=--
m
2'i1
v=-=2'iI-'iA
m
(121)
Damit wird
und mit den Multipliziererkennwerten
(122)
CARm
nach Gl. (114)
1 ~(1 + UR).
v = 2'iI_l_
CA 16·5 kO 2
8V
Da für die Regeldynamik lediglich die Steilheit des Stellmechanismus
deutung ist, kann aus Gl. (15) abgeleitet werden
(123)
von Be-
dv
ks=-,
(124)
dUR
so daB aus Gl. (123) ksdurch Differenzieren
gefunden wird:
'i]
ks=------CAx 16·5 kOx8V
(125)
Damit wird
Vp
3
= -wo CAx16·5
::re
kOx8V
In b
--.
kLl
(126)
Die Implementierung
der Logarithmusfunktion
führt zu (In b)/kLl = 31 V-1.
Für den vorgegebenen Frequenzbereich
Wo = 2::re. 500 ... 2::re. 1500 S-1 war
CA = 5 nF gewählt worden. Die Unabhängigkeit
der optimalen Proportionalverstärkung
v p von Wo in üblichen OsziIIatoren gegeben durch eine
reziproke Beziehung zwischen Wo und 'i - ist bei der hier vorliegenden spezieIIen Art der Frequenz- und KreisverstärkungssteIIung
nicht gegeben. Es
wird deshalb zunächst,
urn die Stabilität
der Regelung zu garantieren,
Wo mln
= 2n. 500
S-l
67-
eingesetzt. Mit diesen Werten ergeben sich
Vp
=
61·5
und
os, = 0.67.103
S-l
(r, =
1·5 rns).
3.5.2. Realisierung des Regiers
In Bild 45 ist die Schaltung des Amplitudenregiers skizziert. Die Amplitudenmessung wird - wie weiter unten begründet wird - an uo * vorgenornrnen.
Der Abtastimpuls kann dann aus den Nulldurchgängen von uo abgeleitet werden. Denn, wie erwähnt, sind Uo nd uo* betragsgleich, aber um nl2 gegeneinander verschoben. Aus Uo und uo* werden rnittels zweier Komperatorverstärker, die in den Nulldurchgängen der Sinusspannungen umschalten, zwei
Impulsspannungen A und B gebilde! (Bild 46). Werden die beiden um t Oszillatorperiode phasenverschobenen Signale über eine Äquivalenz-Funktion (Exklusiv-Oder-Funktion) miteinander verknüpft, dann entsteht ein Signal mit der
doppelten Oszillatorfrequenz, dessen negative Flanken den Abtastzeitpunkt
angeben. (Dieses Signal dient gleichzeitig als Ausgangssignal des Converters, da
die Verdopplung der Frequenz für die Auswertung nützIich ist.) Der Abtastimpuls wird mit einer monostabilen Kippstufe gebildet, deren Ausgangspegel
über eine Pegelumsetzer-Schaltung auf den für die Ansteuerung eines FeldeffektTransistors notwendigen Hub gebracht wird. Die Dauer des Abtastimpulses
muf TI ~ 9·3 I-Lssein, damit sich auch bei Jo max die abgetastete Spannung
während des Abtastens um nicht mehr als 0·1 % ändert. Urn Ungenauigkeiten
des Abtastzeitpunktes zu berücksichtigen, wurde TI = 5 I-Lsgewählt.
,-----------------------------,
"t,
i
. "'-c:-:H~-,
I
I
I
I
i
_______________
Signalausgang
2
'0
Abtastpuls
Bild 45. AmplitudenregIer.
i
i,
J
-68-
l_
(AaB)
Abtastimpu!sf]
n
Bild 46. Erzeugung der Abtastimpulse.
Eine präzise arbeitende Zweiweggleichrichterschaltung führt die Betragsbildung von ua * durch. Die Abtast/Halte-Schaltung besteht aus einem Treiberverstärker, einem Feldeffekt-Transistor-Schalter, einem Speicherkondensator
und einem Pufferverstärker mit sehr hochohmigem Eingang. Kapazität des
Speicherkondensators, Stromergiebigkeit des Treiberverstärkers, DurchlaB- und
Sperrwiderstand des Schalters sowie Eingangsstrom des Pufferverstärkers sind
so aufeinander abgestimmt, daB die Schaltung Sprüngen der Oszillatoramplitude von der GröBe der Sollamplitude folgen kann und daB bei stationärer
Amplitude die Entladung auch bei Jo mln geringer als 0·1 % bleibt. Die anschlieBend erforderliche Logarithmierung wird mit einem Operationsverstärker
realisiert, der bekannterweise über einen Transistor rückgekoppelt ist. Es folgt
ein PI-Regler. Die Sollwertspannung Us - für eine Sollamplitude von
Ua = 3 2 V gemäB Gl. (89) zu bilden - wird ebenfalls über ein Logarithmierglied gebildet. Da es sich um eine statische GröBe handelt, reicht ein
Spannungsteiler aus Festwiderstand und Halbleiterdiode aus. Der Spannungs-
V
- 69abfall über der Diode wird dem Referenzeingang des Reglers, der ebenfalls nur
eine statische Funktion hat, zugeführt. Vorteilhaft an dieser Schaltung ist die
gegenseitige Kompensation der prinzipiell starken Temperaturabhängigkeit der
beiden Logarithmierglieder, wenn die beiden logarithmierenden Halbleitere1emente identische thermische Eigenschaften besitzen (integrierter Doppeltransistor). Der in Bild 45 eingerahmte Teil der Schaltung zeigt den gegenüber
einer konventionellen Regelung für eine Abtastregelung notwendigen Mehraufwand.
3.6. Me8ergebnisse am Oszillator
Der AllpaBoszillator mit Amplitudenregelung ist für sich schon ein MeBgröBenconverter. Als MeBaufnehmer kommen meBwertabhängige Spannungsteiler oder Widerstände in Betracht. Siewürden an die Stelle des Multiplizierers
MI treten. Dabei müBte einem potentiometrisch wirkenden MeBaufnehmer ein
Inverterverstärker nachgeschaltet werden. Ein WiderstandsmeBaufnehmer
- wie z.B, ein Platin-Widerstandsthermometer - würde zweckmäBigerweise
im Rückkopplungszweig eines invertierenden Operationsverstärkers angeordnet
sein. Da dessen Verstärkungsfaktor dann proportional dem Widerstandswert
ist, wird auch die Oszillatorfrequenz eine lineare Funktion des Widerstandes.
Eine Messung der Umformungskennlinie eines Converters in dieser Konfiguration zeigt einen maximalen Linearitätsfehler von -3 . 10-5 (Bild 47). Die
Abhängigkeit der Oszillatorfrequenz von der Sollamplitude zeigt Bild 48. Bei
einer Amplitude von 4·5 Vs führt ein Amplitudenfehler von
1 % zu einem
Frequenzfehler von -2 . 10- 5 •
+
-IÏ-Ol%
Bild 47. Linearitätsfehler des Oszillators nach Bild 43, MI ersetzt durch Inverterverstärker
mit variabier Verstärkung.
-70-
Bild 48. Abhängigkeit der Frequenz von der Sollamplitude.
Bild 49 demonstriert das dynamische Verhalten des Oszillators mit Abtastregelung, jedoch ohne StörgröBenaufschaltung. Denn diese ist in der beschriebenen Converterkonfiguration nicht möglich. Der die Frequenz steuernde
Widerstand wurde sprungartig urn 50 % vergröBert und wieder zurückgeschaltet. Die Dynamik der Amplitudenregelung erreicht annähernd die theoretisch
und durch Simulation vorausgesagten Werte: Der Einschwingvorgang der
Amplitude ist nach etwa drei Perioden der niedrigsten Oszillatorfrequenz (6 ms)
abgeklungen. DaB das theoretische Optimum nicht erreicht wird, erklärt sich
vor allem daraus, daB hier nicht, wie im Normalfall, nur die Kreisverstärkung
gestellt wird, sondern gleichzeitig auch die Schwingfrequenz. Dadurch verändert
sich das Zeitverhalten der Regelstrecke während des Ausregelvorganges. Unkritisches Verhalten des Regelkreises ergibt sich erst bei sub optimaler Einstellung des Reglers.
Für den Einsatz als Converter ist das dynamische Verhalten der Momentanfrequenz wichtiger als das Amplitudenverhalten. Mit einem Momentanfrequenzmesser, der die Dauer einer Halbperiode miBt und daraus die Frequenz ermittelt, wurde der Einschwingvorgang der Frequenz gemessen und ebenfalls in
-71 -
m
Störgröne
fa
Frequenz
+0.15---.
~0'1 - ---
t
r:::::::
Amplitude
I
I
..... 4mso--
Bild 49. Sprungantwort
von Amplitude und Frequenz bei Steuerung des Oszillators durch
m gemäf3 Bild 40.
Bild 49 dargestellt. Erwartungsgemäf
hat die Frequenz noch eher - nach zwei
Perioden der niedrigsten Oszillatorfrequenz
(4 ms) - und fast ohne Überschwingen den stationären Zustand erreicht. Denn die Be- und Entdämpfungen
des Oszillators, die zum Ausregeln der Störung notwendig sind, haben nach
Gl. (8) nur einen Effekt der 2. Ordnung auf die Oszillatorfrequenz.
Voraussetzung ist natürlich, daf die Oszillatorschwingung
weder die Verstärker in den
Sättigungsbereich
aussteuert noch abreiût,
Wesentlich bes ser wird die Dynamik der Oszillatorregelung, wenn eine Störgröfïenaufschaltung
durchgeführt werden kann. In der Zusammenschaltung
mit
dem Kompensatorteil
wird das, wie schon beschrieben, möglich. Bild 50 de-
Störgröne
Frequenz
I
I
1
1
__, 4 ms ,__
~
Bild 50. Sprungantwort von Amplitude und Frequenz bei Steuerung des Oszillators aus Bild 44
durch URK (mit StörgröJ3enaufschaltung).
-72monstriert die Dynamik der Oszillatorregelung, wenn auf den Steuereingang
des Multiplizierers MI eine sprungförmige SteuergröBe gegeben wird, die die
Oszillatorfrequenz über ihren vollen vorgesehenen Bereich verstimmt (0·5-1,5
kHz). Diese SteuergröBe wird dabei gleichzeitig als StörgröBe der Amplitudenregelung aufgeschaltet. Die Amplitude zeigt jetzt trotz der grolsen Störung nur
noch geringe Schwankungen, die Frequenz ist in einer Periode der niedrigstèn
Frequenz (2 ms) nahezu eingeschwungen.
3.7. Kompensator
Der Kompensator besteht aus Vorverstärker mit Möglichkeit zur Addition
der Kompensationsspannung, Demodulator und Regier (Bild 51). Als Vorverstärker wird ein neuartiger integrierter instrumentation amplifier verwandt 31).
Es handelt sich um einen Verstärker mit zwei Paaren von Differenzeingängen.
Das Verhältnis, in dem die Differenzspannungen an den beiden Eingangspaaren
zur Ausgangsspannung beitragen, w'ird über zwei externe Widerstände RS1 und
RS2 sehr präzise festgelegt. An den empfindlicheren Differenzeingang wird die
Ausgangsspannung Llu der DMS-Brücke angelegt. Über den unempfindlichen
Differenzeingang wird der Verstärker rückgekoppelt (RZ1' RZ2)' An den positiven Eingang wird die variable Kompensationsspannung UK angelegt. Eine
feste Kompensationsspannung am negativen Eingang sorgt für eine konstante
Vorverstimmung, so daB der Oszillator im Nullpunkt der MeBgröBe mit
fo mln = 0·5 kHz schwingt.
Über den Vorverstärkungsfaktor VB = Rs2/ RS1 wird die Empfindlichkeit
(span-factor) des Converters eingestellt. Für eine DMS-Brücken-Empfindlichkeit von 1 mV/V für den vollen MeBbereich wird Vu = 10 gewählt. Über
die Dimensionierung des Summierwiderstandes RZ1 für den konstanten Kompensationsspannungsanteil kann eine Vorverstimmung der DMS-Brücke, z.B.
aufgrund einer Tarabelastung kompensiert werden.
Rs.2 ...10k
-------_j
2uo
Bild 51. Kompensator.
Abtastpuls
-73Dem summierenden Vorverstärker folgt ein Nullverstärker mit dem yerstärkungsfaktor 1000. Da die Information über eine Verstimmung der DMSBrücke in trägerfrequenter Form vorliegt (Trägerfrequenz = Jo), kann ein
HochpaBglied zur Unterdrückung von Gleichspannungsdriften des Vorverstärkers und des Nullverstärkers eingeschaltet werden. Aus demselben Grund
muB aber auch das Nullverstärkerausgangssignal erst demoduliert werden, bevor es dem Regier angeboten werden kann. Zur Demodulation wird das Signal
mit dem Träger Uo multipliziert. Ein Multiplizierer als Demodulator hat gegenüber dem in Kompensatoren oft angewandten Schaltdemodulator einen wichtigen Vorteil. Im Nullverstärkerausgangssignal sind auBer der Nutzkomponente
sin (wot) (herrührend von der Brückenverstimmung) eine Blindkomponente
cos (wot) (verursacht durch eine kapazitive Unsymmetrie der DMS-Brücke
oder der Zuleitung), Harmonische der Oszillatorfrequenz sin (n wot),
cos (n wot) (vor allem ungerade Harmonische verursacht durch die restlichen
Nichtlinearitäten des Multiplizierers MI) sowie Rauschen des Nullverstärkers
enthalten. Multiplikation mit dem Träger sin (wot) ist hier gleichbedeutend
mit Korrelation: Nur das Nutzsignalliefert eine Gleichspannungskomponente.
Damit Phasenverschiebungen infolge der relativ geringen Bandbreite des Vorverstärkers (ca. 50 kHz) und des HochpaBgliedes keinen Fehlabgleich verursachen, erfährt der dem Multiplizierer zugeführte Träger Uo über ein BandpaBfilter eine entsprechende Phasenverschiebung. Ein Fehlabgleich käme zustande, wenn eine Blindkomponente in Llu gegenüber dem demodulierenden
Trager eine weitere Phasendrehung erführe und so eine Realkomponente produziert, die eine tatsächlich nicht vorhandene DMS-Brückenverstimmung vortäuscht.
Das demodulierte Signal ist Eingangssignal des Reglers. Damit die Brückenverstimmung vollständig kompensiert wird - d.h., die Regelabweichung Null
wird - wird üblicherweise ein Integralregler eingesetzt. Im Kompensationsfall
ist daher das Nutzsignal sin (wot) Null, jedoch liefert der Nullverstärker, wie
schon erwähnt, Störsignale, die entstprechende Wechselspannungen am Ausgang
des Demodulators verursachen. Diese Signale muB der Regier unterdrücken.
Denn Harmonische der Oszillatorfrequenz im Steuersignal des Multiplizierers
MI bewirken wegen ihrer starren Phasenbeziehung zur Oszillatorschwingung
scheinbare Nichtlinearitäten der Multipliziererkennlinie. Vergleichbar mit der
Oszillatorregelung muB deshalb auch hier der Regier gleichzeitig als Filter wirken, und es tritt der Widerspruch zwischen schneller Regelung und guter Filterwirkung auf. Es liegt nahe, dieses Problem analog der Oszillatorregelung mit
einem Abtastfilter zu lösen.
Der Regier bzw. das Filter besteht aus einem Integralglied und einer Abtast/Halte-Schaltung. Zur Ermittlung der Filtereigenschaften wird zweckmäûigerweise der Multiplizierer mit in das Filter einbezogen. Das Nullverstärkersignal sei
-74Un = U; sin (wt
+ cp).
(127)
Dann liefert der Multiplizierer
Urn= UnUo = U; Uo sin (wt
+ cp) sin (wot).
(128)
Am Ausgang des Integrators ergibt sich
1
U, =-
Jurndt=
1
1
= U; Uo 7: w2 _ W
7:,
,
2
[wo sin (wt
+ cp) cos (wot)
- w cos (wt
+ cp) sin (wot)].
(129)
0
Wird U, zweimal pro Periode jeweils im Nulldurchgang der Trägerschwingung
(sin (wot) = 0) abgetastet, dann trägt nur der erste Teil des Klammerausdrucks in Gl. (129) zum Abtastsignal bei:
u,*
=
1
1
U; Uo --
Wo7:, W2/W02
sin (wt
-
1
+ cp) cos (wot).
(130)
Ergebnis:
- sin (wot) = 0 ist die bevorzugte Phasenlage für die Abtastung, da hochfrequente Störungen (w:» wo) mit l/w2 unterdrückt werden. (Die Filtercharakteristik entspricht dem Betrage nach derjenigen eines TiefpaBfilters
zweiter Ordnung mit einem Pol bei wo.) Eine weitgehende Unterdrückung
hochfrequenter Störspektren ist besonders wichtig, weil diese als Folge des
Abtastprozesses in den Nutzsignalbereich w < Wo umgesetzt werden.
- Im Eingangssignal des Abtast/Halte-Gliedes sind Spektralkomponenten
Wo ± wenthalten. Bei einer Abtastperiode TA = nfwo (Abtastfrequenz
2wo) ergibt sich ein Spektrum n 2 Wo ± (Llwo ± co), also (2 n
1) Wo ± co,
Die Filtercharakteristik eines Haltekreises O. Ordnung besitzt Nullstellen
bei den Vielfachen der Abtastfrequenz n 2 wo. Alle ungeradzahligen Harmonischen der Trägerfrequenz (2 n - 1) Wo werden deshalb eliminiert. Das
ist besonders wichtig für die Blindkomponente der Trägerfrequenz, für deren
Amplitude aus praktischen Gründen erhebliche Schwankungen toleriert
werden müssen. Bei geradzahligen Harmonischen (inclusive Gleichspannungskomponenten) tritt vor allem eine Spektralkomponente Wo im Abtastsignal auf: Die Abtastspannung springt zwischen zwei Werten hin und her.
Geradzahlige Harmonische treten jedoch nur mit sehr geringer Amplitude
auf, so daB keine zusätzlichen MaBnahmen erforderlich sind.
Die Abtast/Halte-Schaltung des Kompensationsreglers ist im Aufbau identisch
mit derjenigen des Amplitudenreglers. Da der Amplitudenregier - wie in Abschnitt 3.5.2 angegeben - die gegenüber Uo urn n/2 in der Phase gedrehte
Spannung Uo* abtastet, können beide Abtastglieder durch denselben Abtast-
+
-75 impuls gesteuert werden. Wie in Bild 45 ist auch in Bild 51 der für die Abtastregelung zusätzlich erforderliche Schaltungsteil eingerahmt.
3.8. Sonstige Elektronik
Der oder die DMS-Me13aufnehmer - bei elektromechanischen Wägeanlagen
sind normalerweise vier, sechs oder sogar acht Me13aufnehmerelektrisch parallel
geschaltet - sollen mit der Oszillatorausgangsspannung Uo gesp eist werden. Zur
Vermeidung einer Belastung des Oszillatorverstärkers durch den sich bei einer
Brückenparallelschaltung ergebenden sehr kleinen Lastwiderstand (z.B. 30 n
bei acht 240 n-Brücken) wird ein Leistungsverstärker zwischengeschaltet
(Bild 52). Zwei Verstärker, die jeweils aus einem Operationsverstärker und
einem Stromverstärker (booster) bestehen, erzeugen die Ausgangsspannungen +2uo und -2uo. Die DMS-Brücken werden darm mit der maximal erlaubten Speisespannung von 4uo ~ 12 Verr symmetrisch gesp eist. Diese Ma13nahme bedingt eine Korrektur der Umformungsgleichung Gl. (l08)
(131)
Die symmetrische Speisung reduziert die Anforderungen bezüglich Gleichtaktunterdrückung des Kompensationsverstärkers auf ein sicher zu realisierendes
Ma13.
Die Betriebsspannungen des Converters (± 15 V= und +5 V=) werden mit
integrierten Spannungsreglern stabilisiert (Bild 53). Aus einer Versorgungsspannung (40 V Wechselspannung oder Gleichspannung beliebiger Polarität),
die entweder vom Auswertegerät bezogen wird oder "vor Ort" zur Verfügung
steht, wird die symmetrische Primärspannung von ± 20 V für die Spannungsregler erzeugt.
Bild 52. MeJ3aufnehmerspeisung.
-76-
Bild 53. Stromversorgung.
3.9. Me8ergebnisse
am Converter
Bild 54 zeigt den Linearitätsfehler des voIIständigen Converters. Die Unregelmäûigkeit der Kurve ist aus der mangeinden Reproduzierbarkeit
der Me13aufnehmer-Ersatzschaltung
zu erklären (Gröûenordnung
10-5). Die Abweichungen von der besten Geraden durch den Nullpunkt ist etwa
3 . 10-5 sowohl
bei einer Empfindlichkeit von L1Rrnnx/R = 10-3 (voller Meûbereich der MeBaufnehmer) als auch bei einer erhöhten Empfindlichkeit
von L1Rrnnx/R =
= 0·5 . 10-3• Eine erhöhte Empfindlichkeit
des Converters ist erforderlich,
wenn aufgrund von groBen Taralasten nicht der volle Meûbereich der MeBaufnehmer ausgenutzt werden kann.
Bei Temperaturversuchen
an einzelnen Labormodellen wurde eine Empfind4
lichkeitsdrift von ± 4. 10- und eine Nullpunktsdrift
von ± 3 . 10-4 in einem
±
r-------_-_'_-_---_---_--
·I
r-----------J ·
+0·01%
·
___.J!
_-
.t:>----d"
--Ol
•
I
-0'01%
·L
------l
·IL.
Bild 54. Linearitätsfehler
Empfindlichkeit óRmax/~ = 10-3 _
Empfindlichkeit A~ax/R
= 0'5.10 3
halber vom Eichgesetz telerierter Fehler
für Wägeenlagen mit einer AUflösung ven
5000 Teilen
.
_
des Converters (bezogen auf Mef3bereichsendwert).
-77 -
t
o
Temperaturdri£t
10
20
----0-----0---30
---
40
50
e
oe
-0,1%
Bild 55. Temperaturdrift
des Converters.
Temperaturbereich von 0 bis ±40 °C gemessen (Bild 55). Setzt man an den
kritischen Stellen des Converters re, Rh RI, R2' RSI' RS2' RZI' RZ2 sowie
Widerstände der Leistungsverstärker)
einen temperaturkompensierten Glimmerkondensator (± 2 ppm;oC) und hochstabile Metalldrahtwiderstände
(± 2 ppm;oC absolut, ± 0·5 ppmr'C relativ) ein, dann bleibt der Fehler auch
im ungünstigsten Fall, wie eine worst case-Rechnung zeigt, in einem Temperaturbereich von ± 20°C innerhalb des halben vom Eichgesetz für Wägeanlagen mit einer Auflösung von 5000 Skalenteilen 33) tolerierten Fehlers (in
Bild 54 angedeutet) *). Die sehr geringe Abhängigkeit der Frequenz von der
Sollamplitude (Bild 48) kombiniert mit der Stabilisierung der Betriebsspannungen führt dazu, daB ein EinfluB der primären Betriebsspannung auf die Frequenz nicht meBbar ist.
Dieses Ergebnis stellt eine deutliche Verbesserung gegenüber dem Stand der
Technik dar. Ungleich bemerkenswerter ist jedoch die Verbesserung in bezug
auf das dynamische Verhalten des Converters. Bild 56 zeigt die Antwort der
Oszillatoramplitude und - wichtiger - die Antwort der Oszillatorfrequenz
auf Sprünge der EingangsgröBe vom MeBbereich Nullpunkt auf den MeBbereichsendwert und zurück. Die Einschwingzeit beträgt in jedem Fall etwa 6 ms,
d.h., drei Perioden der niedrigsten Oszillatorfrequenz! Die Verlängerung der
Ausregelzeit des vollständigen Converters gegenüber dem Oszillator allein
(Bilder 49 und 50) wird durch den Kompensationsregelkreis verursacht. Bei
grofsen Störungen wird der Nullverstärker in seinen Sättigungsbereich ausge*) In der Bild 55 zugrunde liegenden Messung wurden Komponenten mit gröûeren Toleranzen
eingesetzt.
-78 steuert und begrenzt die Änderungsgeschwindigkeit
von URK• Das führt zu dem
rampenartigen
Übergangsverhalten
der Oszillatorfrequenz.
Eine zusätzliche
Totzeit ist bedingt durch den Abtastproze.B des Kompensationsreglers.
Im praktischen Fall wird das dynamische Verhalten durch die Trägheit des mechanischen Me.Bsystems (Feder-Masse-System
aus Mel3aufnehmer und zu wägender
Masse plus Masse der Wägeplattform) bestimmt. Sprungartige Eingangsgröl3en
sind deshalb ausgeschlossen.
Die Eigenfrequenzen
der mechanischen
Mel3systeme sind üblicherweise unter 100 Hz, so dal3 die Regelung allen Me.Bgrö.Benänderungen folgen kann, ohne daf der Nullverstärker begrenzt.
Die technischen Daten des beschriebenen Converters sind in Tabelle I zusammengestellt. Bild 57 zeigt ein Labormodell des Converters. Die Kombination von ho her Mel3dynamik und hoher Me.Bgenauigkeit sowie der vorteilhaften
frequenzanalogen
Signalverarbeitung
bei relativ geringem Aufwand ermöglicht
erstmals eine wirtschaftliche Realisierung von Schnellwägeanlagen
für dynamische Wägeprozesse, die den engen Me.Bfehlertoleranzen der Eichgesetze genügen.
St orqrcûe
10
Frequenz
f
1'5 kHz--
1 kHz
0·5 kHz--
I
I
--; 4 ms t--
Bild 56. Sprungantwort
von Amplitude und Frquenz des durch L1R/R gesteuerten Converters.
-
79-
Bild 57. Labormodell des Converters mit den Baugruppen Oszillator mit Amplitudenregier
(unten links), Abtastschaltungen mit Ansteuerung (oben links), Kompensator (unten rechts),
Leistungsverstärker und Stromversorgung (oben rechts).
-
80-
Tabelle I
Technische Dalen des Con vertes
Eingangsgröûe
Verstimmung
LJR/R einer
speziell DMS-Aufnehmer
Ausgangsgrö13e
Frequenzfo
Umformungsgesetz
fo
+ 0·5 )
kHz
LJRmax/R = 0,2
1.10-3
LJR/LJRmax = 0
1; fo = 0·5 ... 1·5 kHz
LJR/LJRmax = -0·2 ... 1'2; fo = 0·3... 1·7 kHz
Meûbereich
Funktionsbereich
Statische Eigenschaften
Linearitätsfehler
Temperaturfehler
Empfindlichkeit
Nullpunkt
Betriebsspannungseinfiu13
Alterungseinflu13
Dynamische Eigenschaften
Sprungantwort der
Frequenz
Sprungantwort
Amplitude
iJR/R
=(
iJRmax/R
Widerstandsbrücke;
± 0·003%
± 0·04% }
±0.03%
-0 ... 40 C
0
(nicht me13bar)
< 0·01%/Jahr (berechnet nach
Präzisionskomponentenhersteller)
6 ms
4ms
Sprung 0 --+ iJRmax
Sprung LJRmax --+ 0
8 ms
4ms
Sprung 0 --+ LJRmnx
Sprung LJRmax --+ 0
bezogen auf
Me13bereichsendwert
Angaben
der
der
•
-
81-
Formelzeichen
Konstante der Oszillatorgleichung
Basis des Logarithmus
Kapazitäten im Oszillatornetzwerk
Kapazitäten im AllpaB-Oszillator
Dämpfung der harmonischen Schwingung
Übertragungsfunktion
des Oszillator-Netzwerks
Übertragungsfunktion
des Regiers
Übertragungsfunktion
des Oszillator- Verstärkers
Oszillatorfrequenz
laufender Index
Ausgangsstrom des Multiplizierers
Eingangsstrom des steuerbaren Widerstandes
Klirrfaktor durch 3. Harmonische
Konstante des Regiers
Konstante der Oszillator- Ersatzschaltung
a
b
C, Cl> C2
CA' Cl
D
FN
FR
Fv
Jo
ia
ie
K3
kb' kb*
kE
kG
kG*
kI
kI*
kLl, kL2
k., k/
ks
L
m
}
}
n
p
R
R*
s., R2
RA, RI
Rill
RSl> RS2 }
RZl> RZ2
L1R
Konstante
des Gleichrichters
Konstante
der Oszillator-Ersatzschaltung
Konstante der Logarithmusfunktion
Konstante des Regiers
Konstante des Stellgliedes
Induktivität im Oszillator-Netzwerk
Übertragungsfaktor
des Multiplizierers
laufender Index
Differentialoperator
Widerstand, allgemein
scheinbarer Widerstand
Widerstände im Oszillator
Widerstände im AllpaB-Oszillator
Kennwiderstand
des Multiplizierers
Widerstände
im Kompensatorverstärker
Widerstandsvariation
des MeBaufnehmers
Seite
Gl.
5
25
7,8
58
6
(1)
(53)
(102)
(6)
5
12
(1)
5
58
(2)
(103)
62
(112)
61
20
13
18
12
23
18
22
25
13
12
7
61
(110)
(34)
(18)
(31)
(12), (13)
(45)
(29)
(38)
(53)
(17)
(15)
62
7,58
58
62
72
72
58
(111)
(109)
(l02)
(112)
(105)
-
82Seite
Abtastzeitinterval
Länge des Abtastimpuises
Zeitvariabie
Abtastzeitpunkte
Zeitpunkt der Störung
Fehier des Abtastintervals
Anfangswert der Oszillatorspannung
{ Sollwert der Oszillatoramplitude
Oszillatorspannungen
Netzwerkspannungen
Abtastwerte
Ausgangsspannung
des Muitiplizierers
Eingangsspannung
des Muitiplizierers
Ausgangsspannung
des Gleichrichters
U, UO, UO*
UI> U2 •••
UA'
UAO'"
Ua
Ue
Ua
}
Ui
Spannungen
ti",
Un>
Un
UR
URA,
o,
US!
U.
Û
Ü
Llu
v
Vp
}
}
URK
Spannungen
36
67
36
36
42
6
des
(77)
(76)
(86)
(7)
6, 58,65
im Kompensator
Ausgangsspannung
des
Gl.
5
37
61
61
12
74
74
(1), (2)
(109)
(109)
(12), (13)
(129)
(130)
Logarithmierglie-
im Kompensator
Ausgangsspannungen
der Regier
{ = Eingangsspannungen
der Stellglieder
Sollwertspannung
für Amplitudenregier
Steuerspannung
des Multiplizierers
Regelabweichung
Spitzenwerte von Wechselspannungen
arithmetische
Mittelwerte
von Wechselspannungen
Ausgangsspannung
der
Meûaufnehmerbrücke
Verstärkungsfaktor
des Oszillator-Verstärkers
Verstärkungsfaktor
des Oszillator- Verstärkers (konstanter Anteil)'
Verstärkungsfaktor
des Oszillator- Verstärkers (Allpaû-Oszillator)
Verstärkungsfaktor
des
KompensatorVerstärkers
Proportionalverstärkung
des Regiers
25
74
74
12
43
(53)
(128)
(127)
(l4)
43
(89)
(109)
(90)
58
(l05)
5
(2)
12
(16)
58
(102)
58
21
(36)
61
-
83Seite
v_
)
V_b
V_r
~V
~vo,
Störungen von v
}
sprungförmige
}
GröJ3e in der Oszillatorersatzschaltung
~V1'"
Y
Yo,~y
lX,fJ
e
CP1
CPA
cp
~cp
" "I
"A,
"r
0),0)0
O)r
oszillierende Anteile von v
KenngröBen des PI-T1-Reglers
Koeffizient für Nichtlinearität
Phasenwinkel
Phasenwinkel des Abtastzeitpunktes
Phasenwinkel
Phasenfehler
Oszillatorzeitkonstante
Zeitkonstanten des AllpaB-Oszillators
Reglerzeitkonstante
Kreisfrequenz des Oszillators
Übergangsfrequenz
des Regiers
12
13
13
17
36
18
18
28
20
16
34
6
42
5
58
67
6
21
Gl.
(16)
(18)
(17)
(26)
(78)
(29)
(30)
(61)
(35)
(25)
(74)
(7)
(85)
(1)
(102)
(8)
(37)
- 84LITERATUR
.1) D. Gossel,
2)
3)
4)
5)
6)
7)
8)
9)
10)
11)
12)
13)
14)
15)
16)
17)
18)
19)
20)
21)
22)
23)
24)
25)
26)
27)
28)
29)
30)
31)
32)
MeJ3systeme und Regelungen mit Frequenzsignalen, Messen-Steuern-Regeln
14, 22-28, 1971.
D. Meyer, A process for converting quantities to be measured into frequencies, Philips
techno Rev. 29, 189-196, 1968.
D. Meyer, Präzisions-L1R-L1j-Umformer für frequenzanaloges Messen mit DMS, VDIBerichte Nr. 137, 41-44, 1970.
A. A. Andronov,
A. A. Vitt und S. E. Khaikin,
Theory of oscillators, Pergamon
Press, Oxford, usw., 1966.
N. van der Pol, A theory of the amplitude of free and forced triode vibrations, Radio
Rev. 1, 701-710 und 754-762, 1920.
L. A. Meacham, The bridge stabilized oszillator, Proc. IRE Oct. 1938.
B. Bauer, Design Notes on the resistance-capacity oscillator circuit, Hewlett-Packard-J.
1, 3, November 1949; 1, 4, Dezember 1949.
B. M. Oliver, The effect of (.I.-circuitnon-linearity on the amplitude of RC oscillators,
Hewlett-Packard-J. 11, 8-10, 1-8, 1960.
S. G. Freshour,
Precision amplitude control, Electro Technology, 40-49, June 1966.
K. Bergmann, Beiträge zur Stabilitätstheorie und Dynamik präzise amplitudengeregelter
Oszillatorsysteme, Diss. RW TH Aachen, 1968.
W. A. Edson, Intermittent behaviour of oscillators, Bell Syst. techno J. 24, 1-22, 1945.
J. G. Ternan, Envelope stability of low frequency transistor oscillators, Proc. lEE 110,
830-844, 1963.
Schaltungsanordnung zur Erzeugung einer harmonischen Schwingung. Deutsches Patentamt, Offenlegungsschrift DOS 103 138.
D. Meyer-Ebrecht,
Fast amplitude control of a harmonic oscillator, Proc. IEEE 60,
736, 1972.
Schaltungsanordnung
zur Erzeugung einer harmonischen Schwingung mit schnellem
Einschwingverhalten, Deutsches Patentamt, Offenlegungsschrift DOS 2001 451.
O. Zinke und H. Br un s w ig, Lehrbuch der Hochfrequenztechnik,
Springer Verlag,
Berlin, New York, Heidelberg, 1965, Seite 410ff.
P. N aslin, Dynamik linearer und nichtlinearer Systeme, Oldenbourg Verlag, München,
1968.
B. van der Pol, The nonlinear theory of electric oscillations, Proc. IRE 22, 1051-1086,
1934.
G. F. Landvogt,
Eine Verallgemeinerung des van der Pol'schen Oszillatormodells,
NTZ 7, 390-394, 1969.
W. Leonhard,
Einführung in die Regelungstechnik, Vieweg & Sohn, Braunschweig,
1969.
W. Leonhard,
Regelkreise mit symmetrischer Übertragungsfunktion,
Regelungstechnik
13, 1,4-12, 1965.
S. N. Porter, Signal generator with rapid automatic amplitude stabilisation, US-Patent
3.419.815 vom 31.12.1968.
C. F. Moore, C. L. Smith und P. W. Murrill, Simplifying digital control dynamics for
controller tuning and hardware lag effects, Instr. Practice, 45-59, Januar 1969.
G. Landvogt
und D. Meyer-Ebrecht,
Frequency-analogy - a powerful tool for
process instrumentation, Proc. 5th IFAC World Congress, Paris 1972.
D. Meyer-Ebrecht,
Entwurfsprinzipien
für
Präzisions-Relaxationsoszillatoren,
4. Mikroelektronik-KongreJ3 München 1970, R. Oldenbourg Verlag, München.
H. Hinkelmann
und H. M. Ihme, Ein elektrisches Tiefseethermometer mit kurzer
Einstellzeit, Z. angew. Physik 15, H5, 429-435, 1963.
Y. Sun und I. T. Frisch, Resistance multiplication in integrated circuits by means of
switching, IEEE Trans. CT-1S, 184-192, 1968.
P. Seyfried
und W. Lange, Eine einfache Analog-Multiplizierstufe
mit FeldetfektTransistoren, MeJ3technik 7/8, 187-192, 1969.
B. Gilbert, A precise four-quadrant-multiplier
with subnanosecond response, IEEE J.
SSC, 356-373, 1968.
D. Gossel, Frequenzanalogie - ein Konzept für die MeJ3- und Regeltechnik mit digitaler Signalverarbeitung, ETZ-A 93, 577-581, 1972.
H. Krabbe,
Monolithic data amplifier, Analog Dialogue 6, 3-5, 1972 (published by
Analog Devices Inc., Norwood, Mass., USA).
K. E. Kuijk, Multiplikatorschaltung,
wird verötfentlicht in Neues aus der Technik.
- 8533)
34)
35)
Eichordnung in der Fassung vom 14.4.1965, Abschnitt IX Waagen und Wägemaschinen.
Mit dem Stand der 15. Verordnung zur Änderung der Eichordnung vom 26.6.1970,
§ 541-560.
W. M. G. van Bokhoven,
private Mitteilung.
Schaltungsanordnung
zur Umformung einer Brückenverstimmung in eine Frequenzänderung, Deutsches Patentamt, Offenlegungsschrift DOS 2214 114.