ET3-Zusammenfassung - Flo
Werbung

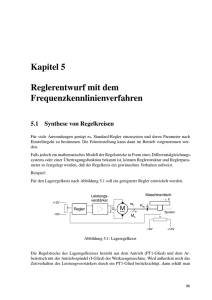
ET2 Zusammenfassung 17. Dezember 2009 ET3-Zusammenfassung Inhaltsverzeichnis 1 Kapitel 1( VL1) 2 2 Kapitel 1( VL2) 2 3 Kapitel 2( VL3) 3 4 Kapitel 2( VL4) 3 5 Kapitel 3( VL6) 3 6 Kapitel 3( VL7) 3 7 Kapitel 3( VL8) 3 8 Kapitel 4( VL9) 4 9 Kapitel 4( VL10) 4 10 Kapitel 4( VL11) 4 11 Kapitel 4( VL15) 4 12 Kapitel 4( VL16) 5 13 Kapitel 1a( VL17) 5 14 Kapitel 5( VL18) 5 15 Kapitel 5( VL19) 5 16 Kapitel 5( VL21) 6 17 Kapitel 5( VL22) 6 18 Kapitel 5( VL23) 6 19 Kapitel 5( VL24) 7 20 Kapitel 5( VL25) 7 21 Kapitel 5( VL26) 7 22 Kapitel 5( VL26) 8 1 ET2 Zusammenfassung 17. Dezember 2009 1 Kapitel 1( VL1) 1. Das dynamische Verhalten eines Systems wird im Zeitbereich durch Differentialgleichungen und im Laplace-Berreich für linerare Systeme durch Übertragungsfunktion beschrieben 2. Die charakteristische Gleichung einer linearen Differentialgleichung entspticht der Nennerpolynom der Übertragungsfunktion 3. Bei der Faktorisierung der Übertragungsfunktion ergeben sich folgende Faktoren: eine Konstante, die einem Verstärkungsfaktor (kann dimensionsbehaftet sein) entspricht, Pole oder Nullstellen im Ursprung = 0, reele Pole und Nullstellen sowie komplexe Polund Nullstellenpaare) 4. Der Frequenzgang repräsentiert die imaginäre Achse der komplexen s-Bereichses un beschreibt nur den eingeschwungen Zustand eines linearen dynamischen Systmes während die Übertragungsfunktion den gesamten s-Bereich abdeckt und auch den Eingeschwingvorgang mit berücksichtigt 5. Vom Frequnzgang zur Übertragungsfunktion gelangt man, in dem man mit jω durch s erstezt. Entsprechend erhält man den Frequenzgang aus der Übertragungsfunktion durch die Ersetzung von s durch jω 2 Kapitel 1( VL2) 1. Ein Vierpol hat zwei Tore und damit vier Anschlüsse 2. Die Vierpolbeschreibung ist nur gültig, wenn an jedem Tor des Vierpols der in einer klemme hineinfließende Strom an der anderen Klemme wieder herausfließt 3. Es können bei gewissen Vierpolen nicht alle Koeffizienten der verscheidenen Matrizen bestimmt werden 4. Es aktiver linearer Vierpol kann durch ein T-Ersatzschaltbild mit drei Impendanzen und einer stromgesteuerten Spannungsquelle beschreiben werden 5. Ein aktiver linearer Vierpol kann durch ein Π-Erstazschaltbild mit drei Admittanzen und einer spannungsgesteuerten Stromquelle beschrieben werden 6. Umrechnen der Vierpolgleichungen über die Tabelle 7. Um die 4 unabhängigen Vierpolgleichungen zu erhalten, ist im Allgemeinen eine Schaltung mit einer gesteuerten Quelle notwendig 8. T-Ersatzschaltbild eines Vierpols, die Zusammenhänge der Koeffizienten ergibt sich aus der Anwendung der Maschenregel 9. Π-Ersatzschaltbild eines Vierpoles, die Zusammenhänge der Koeffizienten ergeben sich hierbei aus den Knotengleichungen 10. Das umwandeln der Koeffizeinten geschieht mit Hilfe der Tabelle der Vierpolkoeffizienten und Determinanten (Kettenbezugspfeilsystem) 2 ET2 Zusammenfassung 17. Dezember 2009 3 Kapitel 2( VL3) 1. Bei der Kettenschaltung erhält man die MAtrix für das Gesamtsystem durch die multiplikation der einzelnen Vierpolmatrizen 4 Kapitel 2( VL4) 1. Bei der Reihen-, Parallel-, Reihenparallel- und Parallelreihenschaltung erhält man die Matrix für das Gesamtsystem durch die Addition der einzelnen Vierpolmatrizen. 2. Die Addition von zwei Vierpolmatrizen ist in der Regel nur zulässig wenn ein Vierpol bindungsfrei ist, d.h. es keine elektrisch leitende Verbindung zwischen Eingang und Ausgang gibt. Die Bindungsfreiheit kann durch die Verwendung eines idealen Übertragers mit dem Übersetzungsverhältnis ü=1 erreicht werden. 3. Bei der Reihen- und Parallelschaltung ist die Addition auch für kurschlussgebundene Vierpole (die Ein- und Ausgangsseite ist durch einen Kurzschluss miteinander verbunden) zulässig, wenn die kurzschlussgebundenen Anschlüsse zusammengeschaltet werden. 5 Kapitel 3( VL6) 1. Die Benennungsspannung für das Drehstromsystem ist die Außenleiterspannung. 2. DIe Phasenverschiebung zwischen den drei Außenleiter- bz. drei Sternspannungen beträgt jeweils −120◦ . √ 3. Der Effektivwert der Außenleiterspannung ist 3 mal so groß wie der Effektivwert der Sternspannung. 6 Kapitel 3( VL7) 1. Im Drehstromsystem ist die Augenblicksleistung konstant. 2. Bei symmetrischen Verbrauchern ist der Außenleiterstrom in Dreieckschaltung drei mal so groß wie in der Sternschaltung. √ 3. Bei symmetrischen Verbrauchern ist die gesamte Scheinleistung S = 3 · U · I . 4. Durch eine Blindleistungskompensation wird der Strom und damit die Spannungsabfälle und Stromwärmeverluste auf den Zuleitungen reduziert. 7 Kapitel 3( VL8) 1. Die Wirk- bzw. Blindleistungen werden einfach addiert. 3 ET2 Zusammenfassung 17. Dezember 2009 2. Bei unsymmetrischer Belastung (Sternschaltung) im Dreileiternetz oder im Vierleiternetz tritt bei einem nicht an den Neutralleiter angeschlossenen Sternpunkt eine Sternpunktverlagerungsspannung auf. 8 Kapitel 4( VL9) 1. Das dynamische Verhalten von Systemen kann im Zeitbereich durch Differentialgleichungen und im Laplace-Bereich (bei linearen Systemen) durch die Übertragungsfunktion beschrieben werden. 2. Die Kirchhoffschen Gesetze und die Strom-Spannungsbeziehungen an den Bauelementen sind für die Ermittlung der Differentialgleichung und der Übertragungsfunktion ausreichend. 3. Aus der Übertragungsfunktion erhält man die Differentialgleichung durch kreuzweise Ausmultiplikation mit der laplacetranfsormierten Ausgangs- bzw. Eingangsgröße und anschließender Rücktransformation in den Zeitbereich. 4. Bei den angestrebten Schreibweisen stehen vor den Ableitungen im Zeitbereich und den Potenzen der Laplace-Variablen s im Bildbereich Zeitkonstanten. 5. 9 Kapitel 4( VL10) 1. Die Konstanten der homogenen Lösung ergeben sich im Zeitbereich durch die Spannungen an den Kondensatoren sowie den Strömen durch die Induktivitäten zum Schaltzeitpunkt. Im Laplace-Bereich werden die Anfangsbedingungen durch zusätzliche Quellen in der Schaltung mit berücksichtigt. 10 Kapitel 4( VL11) 1. Um den zeitlichen Verlauf des Ausgangssignals zu erhalten, wird das Nennerpolynom der Bildfunktion zunächst faktorisiert. Anschließend wird eine Patialbruchzerlegung durchgeführt und die einzelnen Terme in den Zeitbereich zurücktransformiert. Dabei ist zu beachten, dass die Lösung nur für Zeiten ab dem Schaltzeitpunkt gültig ist. 2. Die partikuläre Lösung der Differentialgelichung beschreibt den eingeschwungenen Zustand des Systems. 11 Kapitel 4( VL15) 1. Beim Schalten von Wechselströmen kann die partikuläre Lösung der Differentialgleichung am besten im Frequenzbereich ermittelt werden. Mit Hilfe des Frequenzgangs lässt sich sofort der zeitliche Verlauf angeben. 4 ET2 Zusammenfassung 17. Dezember 2009 12 Kapitel 4( VL16) 1. Der maximale Strom beim Einschalten eines RL-Kreises tritt beim Spannungsnulldurchgang auf. 13 Kapitel 1a( VL17) 1. Die Dynamik eines Systems ist im Wesentlichen durch das Nennerpolynom der Übertragungsfunktion gegeben. 2. Das Bode-Diagramm beschreibt als grafische Darstellung des Frequenzgangs, der eine Untermenge der Übertragungsfunktion ist, ebenfalls das dynamische Verhalten eines Systems. 3. Das Bode-Diagramm erlaubt die Beurteilung des Stabilität von dynamischen Systemen und Regelkreisen. 4. Die asymptotische Darstellung des Amplitudenganges ist in vielen Fällen ausreichend. Im Zweifelsfalle ist an den Knickfrequenzen entsprechend zu korrigieren. 5. Um den Frequenzgang eines Systems messen zu können, muss das System stabil sein, d.h. die Pole des Frequenzganges bzw. der Übertragungsfunktion müssen links der imaginären Achse liegen. 14 Kapitel 5( VL18) 1. Die Grenzwertsätze der laplace-Transformation sind sehr hilfreich um Aussagen Über den Anfangs- bzw. Endwert eines Einschwingvorganges machen zu können. Vorraussetzung für die Anwendung ist jedoch, dass ein Grenzwert existiert. 2. Mit Hilfe der Maxwellschen Gleichungen können alle elektromagnetischen Vorgänge vollständig beschrieben werden. Die analytische Anwendung der 7 Gleichungen ist jedoch für zahlreiche Aufgabenstellungen nicht so einfach. Deshalb muss man häufig auch auf numerische Verfahren zurück greifen. 3. Sind bestimmte Voraussetzungen hinsichtlich Frequenz und Abständen bzw. Anstiegszeiten und Lauftzeiten erfüllt, so können die Maxwellschen Gleichungen vereinfacht werden. Dies hat auch zur Folge, dass bei den elektromagnetischen Feldern im Nahfeldbereich das elektrische und das magnetische Feld getrennt voneinander betrachtet werden können. 15 Kapitel 5( VL19) 1. Bei reinen Quellenfeldern (elektrisches Feld wird nur durch Ladungen erzeugt und nicht durch sich ändernde Magnetfelder) ist die Spannungsberechnung wegunabhängig. 2. Während die elektrische Feldstärke an Grenzschichten springt, ist der Potentialverlauf stetig 5 ET2 Zusammenfassung 17. Dezember 2009 3. Die Elektrische Feldstärke ist wichtig für die Auslegung von Isolationssystemen. 4. Die relative permittivitätszahl (relative Dielektizitätskonstante) ist abhängig von den Polaristationsmechanismen und damit frequenzabhängig. 5. Die Verknüpfung der dielektrische Flussdichte mit der elektrischen Feldstärke über die Permittivität (Dielektrizitätszahl) ist nur für isotrope (richtungsunabhängige) Materialien zulässig. Ansonsten ist zusätzlich die elektrische polarisation für die Beschreibung zu berücksichtigen. 6. Das Ersatzelement zur Beschreibung des elektrischen Feldes ist die Kapazität, die nur von der Geometrie und der Permittivität abhängt. 16 Kapitel 5( VL21) 1. Bei metallischen Körpern verschieben sich die Ladungen aufgrund der Influenz im elektrischen Feld. 17 Kapitel 5( VL22) 1. Bei quasistatischen Magnetfeldern ist die Rückwirkung des elektrischen Feldes vernachlässigbar. 2. Beim Übergang an den Grenzschichten sind die Normalkomponenten der Flussdichten und die Tangentialkomponenten der Feldstärken stetig 3. Die magnetische Feldstärke ist wichtig für die Kraftwirkung auf stromdurchflossene Leiter und für die Spannungsinduktion in benachbarten Stromkreisen. 4. Die relative Permeabilitätszahl bei ferromagnetischen Materialien ist in der Regel nichtlinear sowie frequenzabhängig. 5. Die Verknüpfung der magnetischen Flussdichten mit der magnetischen Feldstärke über die Permeabilität ist nur für isotrope (richtungsunabhängige) Materialien zulässig. Ansonsten ist zusätzlich die magnetische Polarisation für die Beschreibung zu berücksichtigen. 6. Das Ersatzelement zur Beschreibung des magnetischen Feldes ist die Indutkivität, die nur von der Geometrie und der Permeabilität abhängt. 7. Die Gegeninduktivität ist eine wichtige Größe bei der Berechnung von induzierten Spannungen. 18 Kapitel 5( VL23) 1. Mit steigender Frequenz setzt beim elektrischen Strömungsfeld eine Verdrängung der Stromdichte (Skineffekt) zur Leiteroberfläche hinein. 6 ET2 Zusammenfassung 17. Dezember 2009 2. Die äquivalente Leitschichtdicke (oder auch Eindringtiefe) beschreibt die Stromverdängung und gibt an, welche Schichtdicke mit konstanter Stromdichte den gleichen Gesamtstrom ergeben würde 3. Eine gute Beschreibung einer elektrisch kurzen Leitung ist durch die Verwendung einen Π-Ersatzschaltbild mit einem Widerstand und einer Induktivität in Längsrichtung und hälftig aufgeteilten Kapazitäten und Leitwerten in Querrichtung möglich. 4. Eine elektrisch lange Leitung lässt sich druch eine Kettenleiterersatzschaltbild der elektrisch kurzen Leitung näherungsweise beschreiben, wobei dann Leitungsbeläge verwendet werden. Eine bessere Beschreibung ist mit Hilfe der Leitungsgleichungen (Telegrafengleichungen) möglich. 5. Der Indutkivitätsbelag ist nur leicht frequenzabhängig, da der Beitrag der inneren Selbstinduktivität (nimmt der Frequenz ab aufgrund der Stromverdrängung) in der Regel klein ist. Der Kapazitätsbelag ändert zwar seinen Wert in Abhängigkeit von den frequenzabhängigen Polarisationsmechanismen, er kann aber in vielen Fällen als näherungsweise konstant betrachtet werden. Der Leitwertbelag ist für niedrige Frequenzen oft kleine und somit vernachlässigbar. Mit der Erhöhung der Frequenz steigt er zunächst linear und später überproportional an. Der Widerstandsbelag ist bis zu einer bestimmten Frequenz fast konstant und steigt danach aufgrund Stromverdängung näherungsweise mit der Wurzel aus der Frequenz an. 19 Kapitel 5( VL24) 1. Der Wellenwiderstand und die Fortpflanzungskonstante sind zwei wichtige Kenngrößen einer elektrisch langen Leitung. 2. Die Reflexion und Brechung elektromagnetischer Wellen sind bei elektrisch langen Leitungen von großer Bedeutung. 3. Um Mehrfachreflexionen zu vermeiden, sollte die Leitung am Anfang oder Ende mit dem Wellenwiderstand abgeschlossen sein. 20 Kapitel 5( VL25) 1. Bei der impulsförmigen Anregung einer elektrisch langen Leitung ist zunächst der Wellenwiderstand wirksam 21 Kapitel 5( VL26) 1. Beim Zusammenschluss von zwei Leitungen mit unterschiedlichem Wellenwiderstand sieht die Welle an der Übergangsstelle nur den Wellenwiderstand der anderen Leitung und nicht was an diese Leitung angeschlossen ist. 7 ET2 Zusammenfassung 17. Dezember 2009 2. Bei Leitungsverzweigungen ergibt sich die bei der Berechnung zu berücksichtigende Impedanz aus der Parallelschaltung aller an die betrachtete Leitung angeschlossenen Leitungen. 22 Kapitel 5( VL26) 1. Eine einfache Berechnung von Wanderwellenvorgängen auf verzerrungsfreien Leitungen, an die nur noch ohmsche Widerstände angeschlossen sind, it mit Hilfe des BewleyVerfahrens möglich. 8