Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren
Werbung

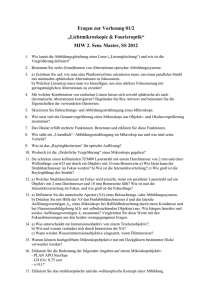
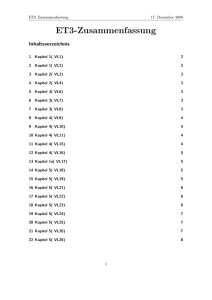
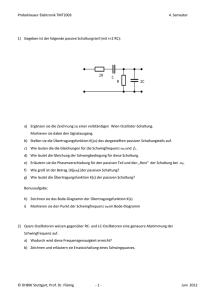
Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5.1 Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard-Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen. Die Feineinstellung kann dann im Betrieb vorgenommen werden. Falls jedoch ein mathematisches Modell der Regelstrecke in Form eines Differentialgleichungssystems oder einer Übertragungsfunktion bekannt ist, können Reglerstruktur und Reglerparameter so festgelegt werden, daß der Regelkreis ein gewünschtes Verhalten aufweist. Beispiel: Für den Lageregelkreis nach Abbildung 5.1 soll ein geeigneter Regler entwickelt werden. +10V Regler -10V Maschinentisch x Leistungsverstärker UA M L KR, JL Spindel MA -10V +10V Abbildung 5.1: Lageregelkreis Die Regelstrecke des Lageregelkreises besteht aus dem Antrieb (PT1-Glied) und dem Arbeitstisch mit der Antriebsspindel (I-Glied) der Werkzeugmaschine. Wird außerdem noch das Zeitverhalten des Leistungsverstärkers durch ein PT1-Glied berücksichtigt, dann erhält man 96 97 5.2 Anforderungen an den Frequenzgang des Regelkreises folgende Übertragungsfunktion dritter Ordnung: G s k2 k3 k1 1 T1 s 1 T2 s s (5.1) Für den Reglerentwurf muß zunächst genauer angegeben werden, was unter einem „guten” Regelkreisverhalten zu verstehen ist. Da das mathematische Modell als Übertragungssfunktion gegeben ist und die Frequenzlinien für den Entwurf benutzt werden sollen, müssen dafür Bedingungen im Frequenzbereich formuliert werden. 5.2 Anforderungen an den Frequenzgang des Regelkreises Generell gilt: ein Regelkreis soll der Führungsgröße unabhängig von äußeren Störungen und von Parameterschwankungen möglichst genau folgen - also ein gutes Führungsverhalten aufweisen. Bei linearen Regelkreisen kann der EinÀuß von Störungen unabhängig vom EinÀuß der Führungsgröße untersucht werden. Die Gesamtwirkung ergibt sich dann durch Überlagerung der beiden Einzelwirkungen. Durch Verschieben von Systemblöcken ist es bei einschlei¿gen Regelkreisen stets möglich, den Regelkreis in die Standard-Regelkreis-Struktur umzuformen (vgl. Abbildung 5.2). D (s ) W ( s) Y ( s) E( s) + - + GR ( s ) GP ( s) Regler Strecke X ( s) + Abbildung 5.2: Standard-Regelkreis-Struktur Die Störung (disturbance) D s soll additiv am Ausgang der Regelstrecke angreifen. Bei einem anderen Angriffspunkt - z. B. dann, wenn die Störung additiv am Eingang der Regelstrecke angreift, kann man die Summationsstelle an den Streckenausgang verschieben, muß aber dann die Störung vor der Addition durch den entsprechenden Systemblock (also z. B. die Regelstrecke) schicken. Maßgebend für das Führungsverhalten ist die Führungsübertragungsfunktion T s X s W s (5.2) 5.2 Anforderungen an den Frequenzgang des Regelkreises 98 Da die Regelgröße x t möglichst gut mit der Ausgangsgröße *t (und daher auch X s möglichst gut mit W s ) übereinstimmen soll, wäre die Führungsübertragungsfunktion T s 1 (5.3) ideal. Eine solche Übertragungsfunktion kann im allgemeinen nicht realisiert werden, da dann das Stellglied in einigen Fällen eine unendlich große Leistung abgeben müßte. Man beschränkt sich daher auf die Forderung, daß T j in einem möglichst großen Frequenzbereich näherungsweise 1 wird. Dazu muß die Kreisübertragungsfunktion L s G R s G p s (5.4) durch geeignete Wahl von G R s angepaßt werden. Die Führungsübertragungsfunktion kann in Abhängigkeit von der Kreisübertragungsfunktion aus Abbildung 5.2 bestimmt werden. Mit X s L s E s (5.5) E s W s X s (5.6) und folgt für die Führungsübertragungsfunktion T s L s 1 L s (5.7) Dabei wurde D s 0 angenommen. Die Regeldifferenz E s beschreibt die Abweichung vom idealen Verlauf E s W s T s W s (5.8) setzt mann T s ein, so erhält man E s 1 W s 1 L s (5.9) Beschränkt man sich wieder auf Forderungen an E j , dann muß im entsprechenden Frequenzbereich L j w 1 (5.10) gelten, damit die Regeldifferenz für sinusförmige Führungsgrößen sehr klein wird. Den EinÀuß von Störungen kann man durch die Störübertragungsfunktion charakterisieren. Für die Ausgangsgröße gilt nach Abbildung 5.2 : X s L s E s D s (5.11) 5.3 Anforderungen an das Zeitverhalten von Regelkreisen 99 Da hier nur das Störverhalten betrachtet werden soll, kann W s 0 angesetzt werden. Dann gilt E s X s (5.12) Damit folgt X s 1 D s 1 L s (5.13) bzw. für die Störübertragungsfunktion TD s X s D s 1 1 L s (5.14) Damit sinusförmige Störungen keine Auswirkungen auf die Regelgröße haben, muß im entsprechenden Frequenzbereich TD j r 0 (5.15) L j w 1 (5.16) bzw. gelten.Um für Führungsgrößen und Störungen, die aus sinusförmigen Zeitfunktionen zusammengesetzt sind, eine möglichst kleine Regeldifferenz zu garantieren, muß für die auftretenden Frequenzen in beiden Fällen die gleiche Forderung erfüllt sein. 5.3 Anforderungen an das Zeitverhalten von Regelkreisen Das in Abschnitt 5.2 besprochene ideale Verhalten von Regelkreisen würde bedeuten, daß sich bei einer sprungförmigen Anderung der Führungsgröße die Regelgröße ebenfalls sprungförmig ändert. Diese Anforderung ist auch im Zeitbereich unrealistisch. Zur Beurteilung des Systemverhaltens werden daher Kenngrößen für die Sprungantwort des Regelkreises festgelegt. Man verlangt, daß der Regelkreis schnell reagiert, gut gedämpft und stationär genau ist. Kenngrößen, durch die diese Forderungen erfaßt werden sind: die Anregelzeit (rise time) tan die Ausregelzeit (settling time) taus die Überschwingweite (overshoot) M p die bleibende Regeldifferenz (system error) e * 100 5.3 Anforderungen an das Zeitverhalten von Regelkreisen 1.4 Mp 1.2 e∞ 1 h(t) 0.8 0.6 0.4 0.2 0 0 tr taus 4 2 6 8 10 time (sec.) Abbildung 5.3: Einschwingverhalten der Sprungantwort Die De¿nition der Größen ist in Abbildung 5.3 angegeben. Als Toleranzband für die Festlegung der Ausregelzeit wird meist ein Bereich von 1% bis 5% vorgegeben. Das in Abbildung 5.3 dargestellte Einschwingverhalten ist typisch für Systeme zweiter Ordnung mit einer Übertragungsfunktion von der Form T s 2 0 s 2 2 D 0 s 20 (5.17) Die Überschwingweite kann aus der Sprungantwort berechnet werden. h t p 1 e Mp T D 1 D 2 h t p 1 (5.18) (5.19) Der Zusammenhang zwischen der Überschwingweite M p und dem Dämpfungsgrad D ist in Abbildung 5.4 dargestellt. Für die Bereiche 0n D n 0 6 (5.20) 101 5.3 Anforderungen an das Zeitverhalten von Regelkreisen 1 0.9 0.8 0.7 ← Näherung für M p (D) M p 0.6 0.5 0.4 0.3 0.2 0.1 0 0 0.1 0.2 0.3 0.4 0.5 D 0.6 0.7 0.8 0.9 1 Abbildung 5.4: Zusammenhang zwischen M p und D kann der oben angegebene Zusammenhang durch die Beziehung Mp 1 D 06 (5.21) approximiert werden. Da die Dämpfung D ein Parameter der Kreisübertragungsfunktion ist, können aber die Vorgaben (Spezi¿kationen) im Zeitbereich in Anforderungen an den Frequenzgang des offenen Kreises umgerechnet werden. Die Kreisübertragungsfunktion erhält man aus der Führungsübertragungsfunktion durch Umformen der oben hergeleiteten Gleichung: L s T s 1 T s (5.22) Damit folgt für die Kreisübertragungsfunktion eines Systems zweiter Ordnung: L s 2 0 s s 2 D 0 (5.23) Für diese Übertragungsfunktion kann nun leicht die Phasenreserve in Abhängigkeit vom Dämpfungsgrad über die Arcustangensfunktion bestimmt werden. Der Zusammenhang ist in Abbildung 5.5 dargestellt. 102 5.3 Anforderungen an das Zeitverhalten von Regelkreisen 80 70 60 50 ← Näherung für φ (D) φ r r 40 30 20 10 0 0 0.1 0.2 0.3 0.4 0.5 D 0.6 0.7 0.8 0.9 1 Abbildung 5.5: Zusammenhang Phasenreserve-Dämpfungsgrad Auch hier läßt sich eine Näherung angeben. Für 0 n r r r n D 100 i 60 gilt näherungsweise (5.24) Zu einer vorgegebenen Überschwingweite kann somit ein Dämpfungsgrad bestimmt werden. Damit liegt die notwendige Phasenreserve fest. Damit kann auf einfache Weise angegeben werden, wie groß die Phasenreserve mindestens sein muß, damit die Sprungantwort eine vorgegebene Überschwingweite nicht überschreitet. Die Anstiegszeit der Sprunganwort der Regelgröße ist von der Bandbreite b des geschlossenen Regelkreises abhängig. Für ein System zweiter Ordnung kann näherungsweise - z. B. durch Simulationsuntersuchungen - ein Zusammenhang zwischen der Bandbreite und der Anstiegszeit bestimmt werden. b tan r 2 3 (5.25) Dabei ist b die Kreisfrequenz, bei der der Betrag der Übertragungsfunktion um 3 dB abgefallen ist: T j b d B 3d B (5.26) Aus der Bandbreite kann wiederum auf die Durchtrittsfrequenz c des Amplitudengangs der Kreisübertragungsfunktion geschlossen werden. Die Durchtrittsfrequenz ist durch L j c d B 0 (5.27) 103 5.4 Kompensationsglieder de¿niert. Für Systeme zweiter Ordnung gilt näherungsweise b r 16 c (5.28) Damit kann bei vorgegebener Anstiegszeit die dazu notwendige Durchtrittsfrequenz von L j berechnet werden. Die Ausregelzeit ist außer von der Bandbreite auch noch von der Phasenreserve abhängig. Wenn diese beiden Größen festgelegt sind, dann liegt bei einem System zweiter Ordnung auch die Ausregelzeit fest. Für eine Toleranzbandbreite von 2% gilt näherungsweise D 0 taus r 4 6 (5.29) wobei 0 die Kennkreisfrequenz und D der Dämpfungsgrad der Übertragungsfunktion des geschlossenen Kreises ist. Für die bleibende Regelabweichung ist die Verstärkung der Kreisübertragungsfunktion L s bei niedrigen Frequenzen maßgebend. Falls L s einen Pol bei s 0 besitzt (also ein Integrierer im Kreis vorhanden ist), können Sollwertverstellungen exakt ausgeregelt werden. Bei rampenförmiger Führungsgröße bleibt ein “Geschwindigkeitsfehler” e * 1 V (5.30) Falls die Kreisübertragungsfunktion keinen Integrierer enthält, bleibt bereits bei sprungförmiger Veränderung der Führungsgröße (also einer Sollwertverstellung) eine bleibende Regelabweichung von e * 1 1V (5.31) V ist dabei der jeweilige Verstärkungsfaktor der Übertragungsfunktion. Um vorgegebene Spezi¿kationen erfüllen zu können, müssen also die Frequenzkennlinien der Kreisübertragungsfunktion passend korrigiert werden. Wesentlich ist dabei der Verstärkungsfaktor bei niedrigen Frequenzen, die Durchtrittsfrequenz und die Phasenreserve. Es sind also Korrekturglieder erforderlich, die es gestatten, die Frequenzkennlinien des offenen Kreises zu verformen. Reglertypen, die dies erlauben, sind Kompensationsglieder zur Phasenanhebung (“Lead-Glieder”) und zur Betragsabsenkung (“Lag-Glieder”). 5.4 Kompensationsglieder a) Lag-Glieder Ziel ist es, bei tiefen Frequenzen eine hohe Verstärkung zu erzielen, ohne dadurch die Durchtrittsfrequenz zu verändern. 104 5.4 Kompensationsglieder Ein Übertragungsglied, das für diesen Zweck genutzt wird, besitzt die Übertragungsfunktion G s K G s sma sa (5.32) 1 ms a K m 1 as (5.33) Die Frequenzkennlinien dazu sind in Abbildung 5.6 angegeben. Ein Grenzfall des Lag-Gliedes ist der PI-Regler. Er geht aus dem Lag-Glied hervor: für a 0 wobei gleichzeitig m a T1n festgehalten wird, geht die Übertragungsfunktion des LagGliedes in die Übertragungsfunktion des PI-Reglers über: 1 t G s K 1 u (5.34) Tn s Als Preis für die Betragsabsenkung muß eine Phasenrückdrehung bei der Durchtrittsfrequenz in Kauf genommen werden. Diese Phasenrückdrehung ist um so geringer, je kleiner a gewählt wird. Allerdings reagiert dieses Korrekturglied dann auch entsprechend langsam (die Ausregelzeit vergrößert sich). b) Lead-Glied Wenn bei der Übertragungsfunktion des Lag-Gliedes Zähler und Nenner vertauscht werden, dann bewirkt ein solches Übertragungsglied anstelle einer Phasenrückdrehung eine Phasenanhebung und gestattet damit die Vergrößerung der Phasenreserve. Das Maximum der Phasenanhebung muß dazu bei der Durchtrittsfrequenz gewählt werden. Die Übertragungsfunktion eines solchen Lead-Gliedes lautet: sa sma K 1 as m 1 ms a G s K G s (5.35) (5.36) Die Phasenrückdrehung ist für verschiedene m-Werte in Abbildung 5.6 dargestellt. Für m * und K m K ) (5.37) geht das Lead-Glied in einen PD-Regler mit der Übertragungsfunktion G s K über. ) 1T ) s (5.38) 105 5.5 Reglerentwurf 60 50 m=12 φ 40 30 20 m=2 10 0 0.1 1 10 100 log( ω /ω ) 1 Abbildung 5.6: Phasengang von Lead-Gliedern, m 1 2 12 5.5 Reglerentwurf Geht man davon aus, dass die Anforderungen an den Regelkreis durch die Anstiegszeit die Überschwingweite die bleibende Regelabweichung vorgegeben sind, dann müssen folgende Entwurfsschritte durchgeführt werden: Aus der Anstiegszeit folgt die Bandbreite b . Über die Faustformel für die Durchtrittsfrequenz folgt daraus c . Im zweiten Schritt wird durch einen Verstärkungsfaktor bei tiefen Frequenzen die bleibende Regelabweichung festgelegt. Dies führt im allgemeinen dazu, dass die Betragskennlinie die Null-dB-Linie bei einer zu hohen Frequenz schneidet, so dass der Betrag bei der Durchtrittsfrequenz abgesenkt werden muss. Dies kann durch Einfügen eines Lag-Gliedes erreicht werden. Der Faktor, um den der Betrag abgesenkt werden muss, legt den Abstand der Eckfrequenzen des Lag-Gliedes fest. 5.5 Reglerentwurf 106 Aus der Überschwingweite kann mit den Diagrammen nach Abbildung 5.4 und Abbildung 5.5 die Phasenreserve bestimmt werden. Meist muss dazu die Phasenkennlinie im Bereich der Durchtrittsfrequenz angehoben werden. Die Phasenreserve kann dann durch ein Lead-Glied realisiert werden. Da der Entwurf auf der Grundlage von Nährungsbeziehungen erfolgt, muss das Ergebnis in einem abschließenden Schritt durch Simulation überprüft und ggf. durch Feineinstellung der Parameter verbessert werden.