und Drehstromantriebe
Werbung

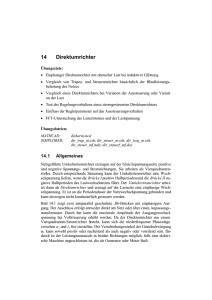
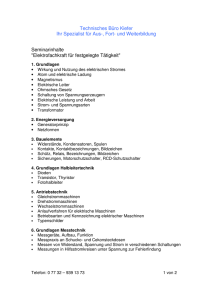
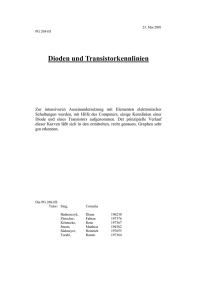
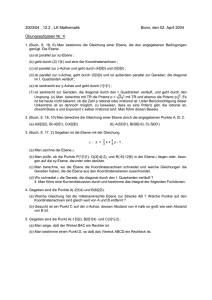
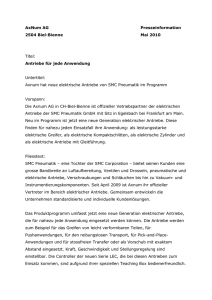
Multifunktionales Powermodul für Gleich-, Wechsel- und Drehstromantriebe Foto: Anja Heidsiek Professor Dr. Klaus Hofer Bei der Automatisierung von Prozessen und Produkten besteht ein großer Bedarf nach drehzahlvariablen Elektroantrieben, welche mit einem Minimum an Leistungselektronik und Sensorik dennoch die mechanischen Anforderungen an der Antriebswelle optimal befriedigen. Unter solch strengen Low-Cost Anforderungen muss und kann in vielen Standardanwendungen der Einsatz von teuren Frequenz- Umrichtern zugunsten von preiswerten Netz- Stromrichtern umgangen werden. Diese einfachen und vielseitigen Powermodule auf Thyristorbasis lassen sich darüber hinaus bequem in den Klemmkasten oder den Anschlussstecker einer elektrischen Maschine integrieren. Wie der folgende Beitrag zeigt, reicht bereits eine kommutierungslose TRIAC- Brückenschaltung für die Realisierung einer multifunktionalen Stromrichterhardware aus, welche über die Ansteuersoftware als Wechselstromsteller (W1), Drehstromsteller (W3), Reversiersparschaltung (W4), Direktumrichter (B2DU) oder Umkehrstromrichter (B2USR) arbeiten und sowohl Gleichstrommaschinen als auch Wechsel- und Drehstrommaschinen mit variabler Spannung und Frequenz speisen kann. Mit solchen digitalen Powermodulen lassen sich elektrische Maschinen in einem oder mehreren Quadranten der Drehzahl- Drehmoment- Ebene betreiben. In Verbindung mit modellgestützten Regelverfahren können darüber hinaus teure Sensorbausteine durch preiswerte Beobachteralgorithmen ersetzt werden. Man spricht in diesen Fällen von sensorlosen Antriebsregelungen [1-4], welche bei guter Dynamik und einem mittleren Drehzahlstellbereich überall in der industriellen und gewerblichen Automatisierungstechnik sowie in Gebäudenetzen, Elektrofahrzeugen und Haushaltsgeräten vorteilhaft einsetzbar sind. 1. Aufbau des multifunktionalen Powermoduls Die drei Umwandlungsmerkmale von Stromrichterschaltungen, nämlich Gleichrichten, Wechselrichten und Umrichten, lassen sich am einfachsten mit einer Brückenanordnung der Leistungshalbleiter realisieren. Beschränkt man sich auf kommutierungslose und lückende Stromrichteranwendungen, so können bereits mit einer einzigen B2-Triacschaltung alle genannten Umwandlungsmerkmale abgedeckt werden. Wie Bild 1 zeigt, kann mit diesem multifunktionalen Powermodul das Drehzahlverhalten von Gleichstrommaschinen, Universalmotoren, Kondensatormotoren und Drehstrommaschinen gezielt beeinflusst werden. Dies führt auf Low-Cost Antriebslösungen beim PumDrehstrommotor pen, Lüften, Transportieren, Rühren, Wickeln, Automatisieren, Positionieren etc. Multifunktions-Powermodul T1 T3 L1 Universalmotor M,Ω Je nach Ansteuerung der Leistungshalbleiter (TRIAC) kann das Multifunktions- Powermodul das Umwandlungsmerkmal des Wechselstromstellers mit Verstellung des Spannungseffektivwertes durch Phasenanschnitt gemäß Bild 2a oder durch Schwingungspaketsteuerung (Bild 2b) sowohl für einphasige als auch für dreiphasige Motoren erfüllen. Durch Variation des Zündmusters arbeitet das Powermodul gemäß Bild 2c als einphasiger Direktumrichter, der den Effektivwert der Ausgangsspannung kontinuierlich und deren Frequenz in Stufen verstellen kann. L2 L3 (N) Einphasenmotor T4 T2 Gleichstrommotor Microcontroller Bild 1: Multifunktions- Powermodul für elektrische Antriebe Bus Ua Ua 50Hz T1, T2 T1, T2 T1, T2 α T1, T2 25Hz T1, T2 ωt T3, T4 T1, T2 T3, T4 a a) Phasenanschnittsteuerung c) Spannungs-Frequenzsteuerung Ud 0Hz Ua T1, T2 Te ωt T b) Schwingungspaketsteuerung T3, T4 T1, T2 d) Gleichrichtersteuerung T3 L1 M L2 3~ L3 T3,T4 T4 2. Reversierung und Sanftanlauf für Drehstrommaschinen Mittels einer Phasenanschnittsteuerung in allen drei Phasen können Drehstrommotoren sanft am Drehstromnetz hochgefahren werden. Dieser so genannte Sanftanlauf oder Softstart lässt sich sowohl vorwärts als auch rückwärts durchführen, wenn die Möglichkeit des elektronischen Phasentauschs vorgesehen wird. Durch Vertauschen zweier Phasen (L1, L3) und direktem Anschluss der dritten Phase (L2) an die Klemmen der Maschine, kommt man gemäß Bild 3 zur vierpoligen Wechselwegn schaltung (W4). Diese Reversiersparschaltung ist in der Lage, einen Drehstrommotor in eiT1,T2 nem begrenzten Bereich des ersten und drit2 1 ten Quadranten der Drehzahl-DrehmomentM 3 4 Ebene zu betreiben [1]. ωt Bild 2: Umwandlungsmerkmale des Multifunktions- Powermoduls T1 T3, T4 Wird das Powermodul gemäß Bild 2d angesteuert, so gibt es an seinem Ausgang eine pulsierende Gleichspannung ab, deren arithmetischer Mittelwert sowohl positiv als auch negativ wird und damit eine Gleichstrommaschine in allen vier Quadranten der M,n- Ebene speisen kann. ωt All diese unterschiedlichen Umwandlungsmerkmale und Einsatzmöglichkeiten des Powermoduls sind softwaremäßig in der Mikrocontroller-Steuerung vorgesehen und können durch entsprechende Anwahl jederzeit abgerufen werden. T2 Bild 3: Vierpolige Reversiersparschaltung (W4) mit Triacs Wegen der Besonderheit von vier Leistungshalbleitern in Brückenanordnung, lässt sich diese Reversiersparschaltung auch noch für die Realisierung weiterer Stromrichterantriebe vorteilhaft nutzen. 3. Direktumrichter für Kondensatormotoren Werden elektrische Antriebe im Dauerbetrieb oder unter aggressiven Umgebungsbedingungen eingesetzt, scheiden Antriebsvarianten mit den kommutatorbehafteten Gleichstrommaschinen und Universalmotoren von vorneherein aus. In raueren Anwendungen, wie zum Beispiel beim Antrieb von Pumpen, Lüftern und Dunstabzugshauben, kommt deshalb nur der robuste und wartungsarme Asynchronmotor zum Einsatz. Im Leistungsbereich bis etwa ein Kilowatt verwendet man meist einie einphasige Asynchronmaschine, auch Kondensatormotor genannt. Um ein Drehfeld in der einphasigen Asynchronmaschine (ASM) aufzubauen, ist gemäß Bild 4 eine Hilfswicklung Ia n (WH) vorhanden, die über einen HochvoltT1 T3 Kondensator mit einem um 90° elektrisch Ua wA Pumpe/ CH phasenverschobenen Wechselstrom gegenLüfter L1 2 1 über der Arbeitswicklung (WA) gespeist UL ASM wird. Eine Verstellung der Drehzahl ist 3 4 N 1~ wH bei dieser Konstellation in engen Grenzen T4 T2 über den Effektivwert (Ua) möglich; darüber hinaus müssen die Frequenz und der Spannungseffektivwert verändert werden. Um Bild 4: Einphasiger Direktumrichter für drehzahlvariable Asynchronantriebe im Low-Cost Bereich den Einsatz eines teuren Frequenzumrichters zu vermeiden, lassen sich mit einem so genannten Direktumrichter bei Pumpen und Lüftern [3] befriedigende Ergebnisse erzielen. M Der einphasige Direktumrichter erzeugt die Ausgangswechselspannung (Ua) direkt aus den 50 Hz-Netzschwingungen, weshalb die Ausgangsfrequenz (f ) nur in Stufen von 50 Hz, 25 Hz, 16,67 Hz, 12,5 Hz, 10 Hz etc. verstellt werden kann. Dabei wird die Stromrichterschaltung sowohl im Wechselwegbetrieb als auch im Gleichrichtbetrieb ausgesteuert, damit sich die entsprechenden Frequenzstufen in Bild 2c generieren lassen. Die Drehzahlwerte (n ~ f ) dazwischen müssen durch eine Spannungssteuerung abgedeckt werden. Bei der Spannungsbildung sollte beachtet werden, dass die Asynchronmaschine nicht nur ihre Drehzahl sondern auch ihre Reaktanzen (X = 2πf ) proportional mit der Frequenz verändert. Um Überströme bei kleineren Frequenzen sicher zu vermeiden, muss der Effektivwert der Ausgangsspannung (Ua ~ f ) mit abnehmender Frequenz ebenfalls durch Phasenanschnitt verkleinert werden. Diese verschiedenen Nutzungsmöglichkeiten eröffnen sowohl dem Drehstromsteller als auch dem Wechselstromsteller ein breites Anwendungsspektrum, da sie ein einfaches und robustes Stellglied für Low-Cost Applikationen darstellen. Werden jedoch bereits geringe bis mittlere dynamische Anforderungen an Anlagen und Antriebe gestellt, muss auf netzgeführte und selbstgeführte Stromrichtervarianten übergegangen werden. Auch die für viele Fahr- und Positionierantriebe [2, 3] wichtige Energierückspeisung durch generatorisches Bremsen der Maschine ist mit Wechsel- und Drehstromstellern prinzipiell nicht möglich. 4. Reversierschaltung für Universalmotoren Um die Drehrichtung eines Universalmotors umzukehren, müssen entweder die Anschlüsse der Erregerwicklung oder die der Ankerwicklung vertauscht werden. Aus Kostengründen wird in vielen Haushaltsgeräten, wie Bohrmaschinen und Waschmaschinen, die DrehrichtungsumT1 kehr des Universalmotors mit einem meL1 chanischen Schalter von Hand oder mir N einem Relais vorgenommen. Bei häufigem Umschalten der Drehrichtungen bieT4 tet sich allerdings die verschleißfreie Variante mit einem Stromrichterstellglied an. n T3 Feld Anker X T2 Bild 5: Reversierschaltung für drehzahlvariable Universalmotoren Die erforderliche, leistungselektronische Schaltung ist in Bild 5 dargestellt. Dabei lässt sich über T1 und T2 durch Phasenanschnitt die Drehzahl der Maschine in engen Grenzen über die variable Spannung verstellen. Werden hingegen T3 und T4 von der Phasenanschnittsteuerung gezündet, ändert sich die Stromrichtung im Anker der Maschine, während sie im Feldkreis unverändert bleibt, sodass der Universalmotor seine Drehrichtung wechselt. 2 1 3 4 M Da die Wechselwegschaltung nach Bild 5 kommutierungslos arbeitet, ist ein generatorisches Bremsen weder von Seiten des Stromrichters noch von Seiten des Universalmotors möglich. Dieser eingeschränkte Reversierantrieb kann ebenfalls nur motorisch im ersten und dritten Quadranten der Drehzahl-Drehmoment-Ebene arbeiten. 5. Umkehrstromrichter für Gleichstrommaschinen Vollgesteuerte, netzgeführte Stromrichterschaltungen können das Vorzeichen der Ausgangsspannung verändern und damit im ersten und zweiten Quadranten der Strom- Spannungsebene arbeiten. Sind auch der dritte und vierte Quadrant erforderlich, muss ein weiterer, voll gesteuerter Stromrichter antiparallel dazugeschaltet werden. Diese Anordnung nennt man Umkehrstromrichter, bzw. auch Doppel-Stromrichter, da sie das Vorzeichen des Ausgangsgleichstroms umkehren kann. Da nieder pulsige B2-Stromrichter in Verbindung mit den kleinen Glättungsinduktivitäten im Ankerkreis der Gleichstrommaschine meist auf lückende Ankerströme bis zum Nennpunkt führen [1], kann der Umkehrstromrichter anstelle von acht Thyristoren gemäß Bild 6 auch mit vier Triacs realisiert werden. Dieser kostengünstige Aufbau arbeitet auf der Netzseite kommutierungslos und auf der Wellenseite in allen vier Quadranten. L T1 n T3 L1 Ψ N T4 2 1 3 4 T2 M Mit Hilfe moderner Regelstrategien lassen sich außerdem die teuren Sensoren für die Drehzahl und den Ankerstrom durch preiswerte Beobachtersoftware , so genannte Zustandsbeobachter und Binäre Beobachter [4], ersetzen. Man spricht in diesen Fällen von sensorlosen Vierquadrant- Gleichstromantrieben, welche ein absolutes Minimum an Hardware bei einem Maximum an Dynamik darstellen. Bild 6: Einphasiger Umkehrstromrichter für Vierquadrant- Gleichstromantriebe 6. Zusammenfassung Mit der vorgestellten TRIAC- Brückenschaltung liegt eine multifunktionale Stromrichterhardware vor, welche über ihre Ansteuersoftware sowohl als Wechsel- und Drehstromsteller oder Reversiersparschaltung als auch als Umkehrstromrichter bzw. Direktumrichter arbeiten kann. Mit diesem innovativen Powermodul lässt sich das Drehzahlverhalten von Gleichstrommaschinen, Universalmotoren, Kondensatormotoren und Drehstrommaschinen gezielt beeinflussen. Solche Low-Cost Antriebslösungen können besonders vorteilhaft beim Pumpen, Lüften, Transportieren, Rühren, Wickeln, Automatisieren und Positionieren eingesetzt werden. 7. Bücher des Autors zum Thema [1] Power-Management/ Leistungselektronik, Antriebe, Bussysteme Offenbach: VDE-Verlag, 2009. ISBN 978-3-8007-2965-4 [2] Elektrotraktion/ Elektrische Antriebe in Fahrzeugen. Offenbach: VDE-Verlag, 2006. ISBN 3-8007-2860-5 [3] Elektrische Antriebstechnik in Zahlen / 56 Berechnungsbeispiele und 190 Projektierungshinweise Offenbach: VDE-Verlag, 1999. ISBN 3-8007-2419-7 [4] Regelung Elektrischer Antriebe/ Innovation durch Intelligenz Offenbach: VDE-Verlag, 1998. ISBN 3-8007-2234-8 8. Zum Autor Professor Dr. Ing. habil. Klaus Hofer, Jahrgang 1949, studierte an der Universität Karlsruhe Elektrotechnik, promovierte an der Universität Siegen und habilitierte sich an der Universität Bielefeld. Dazwischen arbeitete er einige Jahre als Entwicklungsingenieur für elektrische Antriebstechnik in einem Weltkonzern, ehe er einem Ruf nach Bielefeld folgte. Der Autor von neun Fachbüchern und über 60 Fachaufsätzen ist Senior- Member im IEEE (USA) sowie Erfinder der Binären Beobachter, Linearautos und Elektroeinräder. Seine Forschungsergebnisse trägt er regelmäßig auf nationalen und internationalen Tagungen und Konferenzen vor und macht sie in Presse, Funk und Fernsehen einer breiten Öffentlichkeit bekannt und verständlich. Darüber hinaus hat Dr. Hofer eine kognitive Bibel beim C. Goethe Verlag verfasst und dreizehn Kinder aus aller Herren Länder adoptiert. Professor Dr. Klaus Hofer Fachhochschule Bielefeld, Fachbereich Ingenieurwissenschaften und Mathematik Post Box 101113 · 33611 Bielefeld · Tel.: +49 (0) 521 106 72 80 · Fax: +49 (0) 521 106 71 50 E-Mail: [email protected] · www.fh-bielefeld.de/fb2