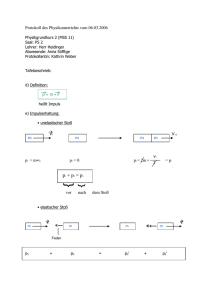
2.7. Stoßprozesse
Werbung

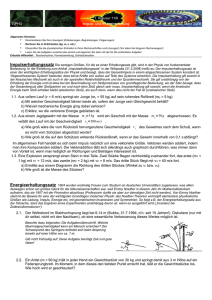
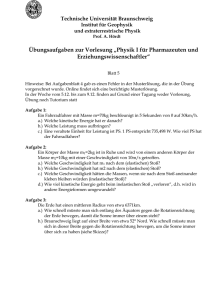
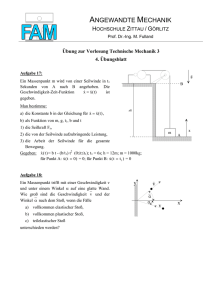
52 2. chanik nungen gehorchen einem fundamentalen Geetz der Erhaltung der Energie: In einem abge chlo enen y tem bleibt der Energieinhalt kon tant. Energie kann weder ernichtet werden no h au nich en tehen' ie kann sich in verschied ne Formen umwandeln oder zwi hen verchiedenen Teilen de y tem au getau cht werden. Zur Es gibt kein Perpetuum mobile er. ter Art; d. h. es ist unmöglich, eine a chine zu bauen die dauernd Arbeit verrichtet, ohne daß ihr von außen ein entsprechender Energiebetrag zugeführt wird . Ab clm. 3.3.2). Der EnergieerhaJtungs atz i t nicht bewei bar' er faßt die jahrhundertelangen Erfahrungen mit Energieumwandlung experimenten zusammen. In einer allgemeinen Form beinhaltet er außer den mechani chen Energieformen der kineti chen und der potentiellen Energie auch thermische Energien chemi che Energien, elektrische und magnetiche Feldenergien. Bleiben in Systemen die nichtmechanischen Energien der Körper konstant ist also in idealisierten mechanischen Systemen die Reibungsarbeit vernachlässigbar, dann gilt für die kineti che Energie und die potentielle Energie des Systems materieller Punkte der Energieerhaltungssatz der Mechanik Ekjn + Epot = konstant. (2-80) gäng und ni htela ti he rformun n wirken daß d r nergi zustand om g "hIt n eg abhängt. In di er i m g abhängig Kräft ind di ipati e Kräft . I bung Ü 2.6-J: Eine tahlkugel (Ma m fällt frei u der Höhe h auf eine tahlplatte und pringt danach auf eine Höhe 11 1 = 0 9 h zurüc . a) Wie groß i t ihre Ge chwindigkeit Va unmittelbar or dem Aufprall? b) Wie groß i t die Geschwindigkeit unmittelbar nach dem Aufprall? c) Wie groß ist die Impul änderung 6p der tahlkuge1 nach Betrag und Richtung? d) Welcher Anteil der ur prünglichen kineLi ehen Energie wurde in nicht-mechanische Energieformen umgesetzt? Ü 2.6-2: Eine Feder (Federkonstante C = 200 Im) wird um ) = 15 em zusammengedruckt. Dann wird eine Kugel (Ma e m = 80 g) auf ie gelegt. Wie hoch pringt die Kugel, wenn die Feder plötzlich entspannt wird? Ü 2.6-3: Eine Schraubenfeder ist durch eine Kraft 1;. = 50 gespann. Wirkt zu ätzlich eine Kraft M = 30 an der Feder wird diese um l1f = 20 cm verlängert. a) Wie groß i t die für diese Verläng TUng erforderliche Arbeit? b) Wie groß ist die Gesamtenergie der gespannten Feder? Ü 2.6-4: Bei großen Deformationen wird das Kraftgesetz einer realen Feder nicht-linear. Für eine Pufferfeder gilt c(x) = k 1 + k 2 x 2 mit k, = 103 Im und k 2 = 10 7 1m3 . Wie weit wird diese Feder zusammengedrückt, wenn ein Körper, der die kinetische Energie Elr.in = 0,3 m hat, in x-Richtung aufprallt? In diesem Fall hängen die mechanischen Energien zu zwei Zeitpunkten t und t ' folgendermaßen zu· ammen: "21 ml (2 VI - 12) + "2I m2 (2 V2 - VI +f CI (sr +m. g(h l S;2) - + t C2(S~ hl)+ m2g v212) + ... - S2 2 ) +... 2.7. Stoßprozesse 2.7.1. Übersicht und Grundbegriffe (2-81) (h 2 - h2)+ ... = O. Im mechani chen EnergieerhaJtungssatz ist die potentielle Energie des y tem durch die Lagekoordinaten s oder h eindeutig bestimmt; ie hängt nicht vorn Weg und den Wechselwirkungen auf die em Weg ab. Die elastische Kraft und die Gewichtskraft, die die potentielle Energie bestimmen werden als konservative Kräfte bezeichnet. Im Gegensatz dazu gilt GI. 2-81) nicht mehr wenn Reibung vor- Bei einem Stoßprozeß berühren sich zwei (?der auch mehrere) Körper kurzzeitig unter Anderung ihres jeweiligen Bewegungszustands, wie Bild 2-36 verdeutlicht. Kennzeichnend ist die Einmaligkeit und die im Vergleich zur gesamten Beobachtung dauer kurze Kontaktzeit der beteiligten Körper. In dieser Wechselwirkungszeit treten verhältnismäßig große Kräfte auf. Die Bewegung wenig tens eines der beteiligten Körper ändert sich abrupt. Stoß-Beispiele ind Billard- Tenni - oder Fußballstöße und Auto-Unfall versuch e. Bild 2.7. Stoßprozesse V1 v2 ::. V2 ' äj -'L 0> :t; , c .~ J:: vl o :ß - t - - - - - - - - - + - - - , ! - - - - - - - - - - t ,ZeHt ~ , I vorher I . 1 . . 1• I , 53 2-37 zeigt ein Beispiel hierfür. Stoßprozesse treten auch bei atomaren Vorgängen auf. Bei Zusammenstößen zwischen Atomen und Molekülen treten an die Stelle der elastischen Kräfte der Mechanik elektrostatische Wechsei wirkungskräfte. Eine KJassifikation der Stöße zwischen makroskopischen Körpern läßt sich nach den geometrischen Verhältnissen und den Änderungen der kinetischen Energie der Stoßpartner treffen. Bild 2-38 zeigt eine Übersicht. nachher ,Stoß-, zeit Bild 2-36. Zeil/icher Verlauf des Stoßes zweier elastischer Körper. 2.7.2. Gerader, zentraler, elastischer Stoß Für ein Zeitintervall kurz vor und kurz nach dem Stoß sind die Änderungen der potentiellen Energien der Stoßpartner und die Reibungsverluste vemachlässigbar gegenüber den kinetischen Energien; für den Stoßzeitraum ist das System abgeschlossen und ohne Einwirkung äußerer Kräfte. Zwischen den Geschwindigkeiten der Stoßpartner vor dem Stoß VI sowie V2 und nach dem Stoß VI sowie V] besteht nach dem Impulserhaltungssatz gemäß GI. (2-54) der Zusammenhang a) (2-82) I Die Vektoren können algebraisch addiert werden, weil der gerade zentrale Stoß eindimensional ist, wie Bild 2-39 verdeutlicht. Die zweite Bestimmungsgleichung ist der Energieerhaltung atz nach GI. (2-81): , 2 1 2 I /2 2 m , VI +2 m2v 2=2 m l VI b) I ,2 +2" m 2 v2 . (2-83) Durch Umformung von GI. (2-83) ergibt sich m! (v! + v'!) (v! - v~) = m 2 (v~ + V2)(V~ - v2 ) und mit GI. (2-82) 1",- !.'2 = - (vi- 2). (2-84) c) Bild 2-37. Crash-Test-ZeitverlauJ Aujfahrgeschwindigkeit 50 km/h, Zeitspanne seit dem Aufprall a) 234 ms, b) 1886 ms, c) Endzustand. Werkphoto: Daimler-Benz AG Vom Körper 2 au ge ehen, bewegt ich der Körper 1 nach dem toß mit drelben Relativgeschwindigkeit weg, mit der er vor dem Stoß auf den Körper 2 zugelaufen ist. 54 2. Mechanik Berührungsebene !!. / Im Berührpunkt P der beiden Stoßpartner läßt sich eine BefOhrungsebene (Tangentialebene) und senkrecht darauf die Stoßnorma/e konstruieren. 2,tIII Ohne äußere Kräfte gilt für die 'mpulsänderungen (Kraftstöße) der beiden Stoßpartner: ~ = I~1 dt = -AI>;. I = '12 df Entsprechend gilt für die Komponenten: ~.tan = -ÖP2,tan und APt ,norm = -AP2.norm \ Stoßnonnale = ÄS'2,tan =0 , tritt auf, wenn im Berührpunkt keine Reibungskraft wirksam wird glatter Stoß !!.A,tan rauherStoß Ap,,1an = -~tan zentraler stoß Die Wirkungslinie der Kraftstöße Ap geht durch die beiden SChwerpunkte S, und ~. Die Stoßpartner werden durch den Stoßvorgang nicht in Rotation versetzt. Homogene, glatte Kugeln stoßen stets zentral exzentrischer (nicht zentraler) Stoß Die Wirkungslinie der Kraftstöße Ap geht nicht durch die beiden Schwerpunkte S1 und S2: mindestens einer der Stoßpartner wird durch den Stoßvorgang in Rotation versetzt gerader Stoß Die Geschwindigkeiten V1 und V2 derbeiden Schwerpunkte S1 und 52 bewegen sich parallel zur 5toßnonnalen. Bei stoßenden Kugeln laufen die Sch.werpunkte 51 und S2 vor und nach dem Stoß auf derselben Geraden schiefer Stoß Die Geschwindigkeit wenigstens eines der beiden Schwerpunkte S1 und S2 besitzt eine Komponente in tangentialer Richtung: V1,tan ,v2,lan ;c 0 . elastischer Stoß Es tritt kein Ver1ust an kinetischer Energie auf * 0 , im BerOhrpunkt wirkt eine Reibungskraft unelastisd1erStoß Ein Teil der kinetischen Energie wird in andere Energieformen umgewandelt Bild 2-38. Klassifikation der Stoßprozesse. Betrachtet werden nur Stöße, bei denen die Stoßpartner vor dem Stoß reine Translationsbewegungen ausfiihren. vor dem Stoß O o V1 • ~ nach dem Stoß vi Bild 2-39. _ V2 0------- Gerader, zentraler Stoß. Setzt man GI. (2-84) in GI. (2-82) ein, so führt dies auf die BestimmungsgJeichungen für die Geschwindigkeiten nach dem Stoß: (mI - m2) I + 2 ml 2 () I = --=-----=----...;:;;..----=----=--=- (2-85) ml+m2 '_ 2m,v, +(m2-mdv2 m,+m2 V2 - • (2-86) Sind die Massen der Stoßpartner gleich, so tauschen die beiden Körper Geschwindigkeit Impuls und kinetische Energie aus; war vor dem Stoß der gestoßene Körper in Ruhe, so ist nach dem Stoß der stoßende Körper in Ruhe. Stößt ein schwerer Körper einen leichten, dann bewegen sich beide nach dem Stoß in der gleichen Richtung weiter. 1st dagegen die Masse de gestoßenen Körpers größer als die des stoßenden, so wird der stoßende Körper reflektiert, und nach dem Stoß laufen die Körper entgegengesetzt auseinander. Ko1ljdieren Körper extrem unterschiedlicher Massen - prallt beispielswei e ein Ball auf eine Wand -, dann wird beim elastischen Stoß der stoßende Körper vollständig reflektiert. Er behält seine kinetische Energie; der Impul und die Geschwindigkeit sind nach dem Stoß entgegengesetzt zur Einfallsrichtung gerichtet. Beispiel 2.7-1: Ein eutron mit der Masse ml = m stößt zentral auf einen ruhenden Atomkern mit der Masse . 2.7. Stoßproze e m2 = m. Die KolIi ion i t näherungsweise ela- ti eh. Welcher Anteil f der kineti ehen Energie des 55 i t al 0 Wasser (R 20) oder schwere Wa er (D20) ehr viel effektiver als etwa eine Bleiabschirmung. eutron wird auf den Atomkern übertragen? Lö ung: Die Energie des stoßenden E kin. 2.7.3. Gerader, zentraler, unelastischer Stoß eutrons ist 'm 2 vor=2" l VI' Beim Stoß wird die Energie M übertragen: Al:" _ I (2 ./2) uc,-2"mJ V I - t l ' Der Anteil ist f= = f der übertragenen kinetischen Energie Mi E kin• vor = 1 - j2 ~ = 1- (mi - m 2)2 ml + m2 4N 4ml m2 (m I + m2)2 (J + N)l . Der Anteil f der Energieübertragung bei einem geraden zentralen elastischen Stoß eines ruhenden Stoßpartners ist in Abhängigkeit vom Massenverhältni ml: m2 in Bild 2-40 aufgetragen. Der Energieübertrag ist um 0 höher, je geringer der Massenunter chied zwischen den Stoßpartnern ist Zum Abbrem en schneller Neutronen in Kernreaktoren 10° V 5 2 .... :!10-1 <'i I / Geht beim Stoßvorgang kinetische Energie beispielsweise durch Reibungs- oder inelastische Verformungsarbeit verloren, dann muß der allgemeine Energiesatz nach GI. (2-75) zur Berechnung der Geschwindigkeiten nach dem Stoß herangezogen und der Energieverlust ~WberücksichÜgt werden: / I' ....... f\ V Vi = 1\ \, ~, 5 lJ VI = V2 gemäß Bild 2-41 bewegen. Der Impulserhaltungssatz dieses unelastiscben Stoßes lautet 1\ I Zusätzlich zum Impulserhaltungssatz nach GI. (2-82) ist eine weitere Be timmungsgJeichung notwendig um die Ge chwindigkeiten l'1 und 1.:2 nach dem Stoß und den Energieerlust W berechnen zu können (Bei piel 2.5-2). Besonders interessant ist der unelastische Stoß, bei dem die heiden Körper miteinander verkoppelt werden und sich nach dem Stoß mit der gemeinsamen Geschwindigkeit 2 ml(;l+m22=(m,+m2)v" vor dem Stoß m1 nach dem Stoß 10-2 10-2 v' 5 10-1 5 100 5 101 5 102 Massenverhältnis m1 m2 Bild 2-40. Gerader, zentraler Stoß: Anteilf der Energieübertragung in Abhängigkeit vom Massenverhäl/nis der Stoßpartner. m 1 +m2 Bild 2-41. Gerader, zentraler, unela ti eher Stoß mit Kopplung (vollplastischer Stoß). 56 2.Mechanik darau folgt mlvl+m2 V2 V' = - - - - ' - - - - ml +m2 I (2-88) Die für den elastischen Stoß gefundene GI. (2-84) für die Geschwindigkeitsdifferenzen vor und nach dem Stoß gdt für den unelastischen Stoß nicht mehr. Vielmehr gilt für den Stoß mit Kopplung, der auch als vollkommen plastischer Stoß bezeichnet wird v; - v;= O. Es liegt nahe, den teilplastischen Stoß zu definieren, bei dem folgender Zusanunenhang gilt (2-89) I h 9 m 2 »m1 , v2 =O Bild 2-42. Stoßzahl. Zu Beispiel 2.7-2: Bestimmung der Die Aufprallgeschwindigkeit der kleinen Kugel i t V1 = Y2gh = gt J ach GI. (2-89) prallt die Kugel ab mit der Geschwindigkeit dabei sind V2 und v; jeweils null. Die Zeitspanne bis zu einem erneuten Aufprall i t E wird als Stoßzahl bezeichnet und kann folgende Werte annehmen: ~t = 21 v~ I = 2 EV1 = 2 EI. elastischer Stoß vollkommen plastischer Stoß o< E < 1 teilweise plastischer Stoß Damit wird die Stoßzahl tlt E =2-= 0,95. Die StoßzaW kann experimentell bestimmt werden. Beispielsweise beträgt sie für Körper aus gehärtetem Stahl E = 0,95; für Blei gilt E=O. Der Verlust an kinetischer Energie ergibt sich zu Beispiel 2.7-2: Die Stoßzahl läßt sich aus Fallversuchen bestimmen. Dabei läßt man eine kleine Kugel aus der Fallhöhe h auf einen schweren (m 2 ~ m l ) ruhenden Körper fallen (Bild 2-42). Wie groß ist die Stoßzahl E, wenn die Fallhöhe h = 70 cm beträgt und die Zeitspanne zwischen dem ersten und dem zweiten Aufprall ~t = 0,72 s? Lösung: ach dem freien Fall kommt es zum ersten Aufprall nach der Zeit tl f2h = ,/-g=0,378 . g g 1 11 2.7.4. Schiefe, zentrale Stöße 2.7.4.1. Elastische Stöße Bild 2-43 skizziert die Lage der Stoßpartner für den Augenblick, in dem ie sich berühren. Die Verbindungslinie der beiden Massenmittelpunkte in diesem Augenblick ist die Stoßgerade; in Bild 2-43 ist es die y-Achse. Ohne Reibung kann in die x-Richtung senkrecht zur Stoßgeraden keine Kraft übertragen werden. Die Komponenten der Impulse in xRichtung sind vor und nach dem Stoß gleich: m, Vlx = ml vl x , m2 v 2x=m2 v 2x. (2-91) (2-92) Der Impulserhaltungssatz nach GI. (2-54) in Richtung der Stoßgeraden ergibt eine weitere skalare Bestimmungsgleichung: (2-93) 2.7. Stoßproze e 57 Sind die Massen der beiden Stoß partner gleich, und i t der gestoßene Körper in Ruhe, dann folgt aus G1. (2-94) y ~ (2-95) x Die Ge chwindigkeit richtungen der toßpartner stehen in diesem Fan nach dem Stoß senkrecht aufeinander. Erfolgt andererseits der schiefe zentrale, elastische Stoß gegen eine Wand (m2 pm,), dann folgt aus Tabelle 2-5 "'" Bild 2-43. Schiefer, zentraler, elastischer Stoß. Beim elastischen Stoß entsteht kein Energieverlust· der Energieerhaltungssatz nach GI. (2-81) lautet also t ml ( fx + Vry) + t m2 ( ix + viy) = Tabelle 2-5. Schiefer, zentraler, elastischer Stoß. Geschwindigkeiten vordem nach dem Stoß Stoß Vlx Vly v( x = Ul x Uly = (mI - m2) Vly + 2m2 V2y m l +m2 Körper 2 V2x V2x = V2x Massem2 U2y V2y= 2 ml Dly + (m2 m,+m2 Die Winkel PI = tan (Vly!Vlx) und PI = = tan (VI ylvi x) sind gleich groß. Dies ist das Reflexionsgesetz für den schiefen elastischen Stoß eine Körpers an einer Wand: (2-94) Gl. (2-91) bis (2-94) sind vier Bestimmungsgleichungen für die unbekannten Komponenten VI x, )y V2x und vh der Stoßpartner nach dem Stoß. Die Lösungen de Gleichungssysterns sind in Tabelle 2-5 dargestellt. Masse m\ I (2-97) t ml (vIi + vl~) + +m2 (v2i + V2~)' Körper 1 (2-96) "" ml) V2y Der Au fallwinkel i t al winkel. 0 gleich dem Einfall- 2.7.4.2. Inelastische töße Wenn der toßvorgang nicht mehr ela ti ch erfolgt dann gilt der EnergieerhaJtung atz der Mechanik nicht mehr. Zwar liefert der Impulserhaltungssatz für die beiden karte ischen Koordinaten zwei skalare Gleichungen aber es ind zu ätzlich noch zwei geometriche Bedingungen für den Stoßvorgang notwendig. Die e können beobachtete Ablenkwinkel oder gemessene Geschwindigkeitsbeträge sein. Hat man die Ge chwindigkeiten nach dem Stoßvorgang bestimmt, so kann man durch Vergleich der kinetischen Energien vor und nach dem Stoß den Energieanteil ermitteln, der in nichtmechani che Energieformen umgesetzt wurde. Ein grundlegende Beispiel für einen inelati chen Stoß i t der Franck-Hert::- Ver uch (Abschn. . 1). Ga atome nehmen beim toß mit Elektronen nur di krete Energien auf und geben ie kurze Zeit später al Lichtquant ab. 58 2. Mechanik. 2.8. Drehbewegungen Zur Übung Ü 2. 7-J: 1m Weltraum, wo äußere Kräfte vernachlässigt werden dürfen oll von einer Trägerrakete (Ma e m, Geschwindigkeit v) eine Raumkapsel (Ma e ml2) abgesprengt werden. Das nicht mehr gebrauchte Bruchstück (Masse m12) soll dabei zur Ruhe kommen. Welcher Energiebetrag ist dem System zuzuführen? Ü 2.7-2: Ein Eisenbahnwaggon (Masse m)=24000kg) rollt mit einer Geschwindigkeit I = 3 mls auf geraden, ebenen Schienen. Er stößt mit einem zweiten Waggon (Masse m2 = 20 000 leg), der sich mit der Geschwindigkeit V2 = 1,8 mls in derselben Richtung bewegt, zusammen. a) ehmen Sie an, die Waggons kuppeln beim Stoß zusammen. Welches ist die gemeinsame Endgeschwindigkeit Vi? Welcher Betrag an Energie wurde in Wärme umgesetzt? b) Nehmen Sie an, der Zusammenstoß sei vollständig elastisch und die Waggons trennen sich dann wieder. Welches sind dann die Endgeschwindigkeiten v~ und der beiden Waggons? c) Was ändert sich an den Antworten zu den Teilfragen a) und b), wenn sich die heiden Waggons anfangs aufeinander zu bewegen? 2.8. . Drehmoment Um einen materiellen Punkt oder einen Körper in Rotation um eine vorgegebene Dr hach~e zu ver etzen, muß ein Drehmoment ausgeübt werden. Da Drehmoment hängt gemäß Bild 2-44 ab von Betrag und Richtung der Kraft F und dem Abstand r de Angriffspunkts der Kraft von der Drehach e. Die Richtung de Drehmoment leht enkrecht auf der von rund F aufgespannten Ebene. Das Drehmoment ist definiert als Vektorprodukt aus dem Radiusvektor r und der äußeren Kraft F: M=rxF. (2-98) I z v; Ü 2.7-3: Ein Geschoß (Masse ml = 20 g) fliegt horizontal mit der Geschwindigkeit I = 200 m/s. Es trifft auf einen als Pendel an einem langen Draht aufgehängten HolzkJotz (Masse m = 1,0 kg) und durchschlägt ihn. Nachdem die Kugel aus dem Klotz ausgetreten ist, hat das Pendel eine Gechwindigkeit von vp = 2,0 m/s. a) Wie groß i t die Geschwindigkeit I des Geschosses nach Durchschlagen des Pendelklotzes? (Dabei darf die Bewegung des Pendels in der Wechselwirkungszeit mit dem Geschoß vernachlässigt werden.) b) Ist der Zusammenstoß vollständig unelastisch? Welcher Anteil der kinetischen Energie wird in nichtmechanische Energien umgesetzt? Ü 2. 7-4: Ein Körper (Masse ml = 50 g) hat eine Geschwindigkeit VI = 10 m/s. Er trifft auf ein ruhendes Objekt (m2 = 100 g). Nach dem Zusammenstoß ist die Geschwindigkeit des ersten Körpers auf VI = 6 mls vermindert· er fliegt in eine Richtung, die um 45 0 gegen seine ursprüngliche Flugrichtung abweicht. a) Wie groß ist die Geschwindigkeit V2 - nach Betrag und Richtung - des zweiten Körpers nach dem Stoß? b) Wieviel Energie wird beim Stoß in nichtmechanische Energieformen umgesetzt? y M=rxF x Bild 2-44. Zur Definition des Drehmoments M Ein Drehmoment hat seinen größten Wert, wenn der Radiusvektor r und die Kraft F senkrecht aufeinander stehen. Die Maßeinheit des Drehmoments ist I m. Dies ist formal die gleiche Einheit, die auch Arbeit und Energie haben; im Gegensatz zu diesen skalaren Größen ist das Drehmoment jedoch eine Vektorgröße. Für die Berechnung von Gleichgewichten, besonders bei starren Körpern (Abschn. 2.9), spielt das Drehmoment eine zentrale Rolle. 2.8.2. ewtoßsches Aktionsgesetz der Drehbewegung 2.8.2.1. Drehimpuls eines materiellen Punktes Der momentane Ort eines materiellen Punkte der Masse m, der sich unter dem Einfluß