a` b - Uni Stuttgart
Werbung

Kristallstruktur und Mikrostruktur
Teil I
Vorlesung 3
1
Wiederholung
Punktsymmetrie - Erkennung
Eine Punktsymmetrie-Gruppe {G} mit Ordnung N hat
N Punktsymmetrieoperationen Gi, i = 1,2 ,…N.
Ein Objekt mit Punktsymmetriegruppe G bedeutet,
das Objekt nach jeder Operation Gi invariant bleibt!!!
2
Wiederholung
Punktsymmetrie - Erkennung
3-zählige
Drehachse
Rotation auf 60 Grad
2 Br
Inversion
Br
1
BBr3 (BCl3)
B
Br 3
1
2
m
m‘
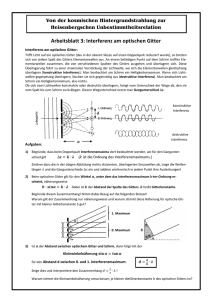
# Flaches Molekül:
m in der Molekülebene
3
# 3 B-Br Bindungen mit gleichen Längen gedreht auf 120 Grad:
eine 3-zählige Drehachse
# 3 2-zählige Drehachsen parallel zu den B-Br Bindungen
3 Spiegelebene m‘ parallel zu den B-Br Bindungen und senkrecht zur Molekülebene
Eine 6-zählige Drehinversionsachse senkrecht auf der Molekülebene
2-zählige
Drehachse
6m2
3
6m2
4
Punktsymmetrie - Erkennung
C
C
m
C
C3: Inversionszentrum in der Mitte + eine
unendliche Drehachse parallel zu C-C-C
+ Spiegelebene senkrecht auf C-C-C
PG: ∞/m
5
42m
6
Punktsymmetrie - Erkennung
A
Bi-pyramide
Pyramide
4/m m m
4mm
B
7
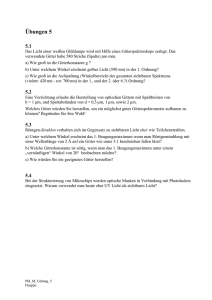
Kristallstruktur
Das Gitter
Die Basis
(1D, 2D- oder 3D-Annordnung von
mathematischen Punkten)
● ● ● ●
● ● ● ●
● ● ● ●
(Atome, Moleküle in der
Elementarzelle)
?
Vorlesung 2
Punktsymmetrieoperationen
Vorlesung 1
Kristall
8
Teil I: Zotov
1
2
Koordinatensysteme, Das Raumgitter, Das reziproke Gitter, Der Metrik-Tensor
Abstrakte Gruppen, Symmetrieelemente und Symmetrieoperationen,
Punktsymmetrie und Punktsymmetriegruppen
3
Translationssymmetrie, Transformationen des Gitters, Kombinationen von Translationen
und Punksymmetrieoperationen
4
1-, 2- und 3D Raumgruppen
5
Beispiele von Raumgruppen, Einfache Kristallstrukturen
5
Makroskopische physikalische Eigenschaften der Kristallen
9
Translationssymmetrie
t ma nb pc
(1)
Alle Translationsvektoren
1. Absgeschlossenheit: t1 + t2 ist auch ein Translation.
t1 + t2 = (m1a+n1b+p1c) + (m2a+n2b+p2c) = (m1+m2)a + (n1+n2)b + (p1+p2)c
10
Translationssymmetrie
2. Assoziativität: t1 + (t2 + t3) = (t1 + t2 ) + t3
m1a + n1b + p1c + [(m2+m3)a + (n2+n3)b + (p2+p3)c] =
[(m1+m2)a + (n1+n2)b + (p1+p2)c] + m3a + n3b + p3c
3. Neutrales Element ist die null Translation: t + 0 = t
4. Invertierbarkeit t + ( -t ) = 0
Alle Translationen eines Gitters formieren eine Gruppe!
11
Translationsgruppe
Eigenschaften der Translationsgruppe:
# Ordnung ∞
# Die Translationsgruppe ist kommutative: t1 + t2 = t2 + t1
# Die Eigenschaften der Translationsgruppe sind unabhängig von der Basiswahl
12
unterschiedliche Möglichkeiten zur Basiswahl des
Translationsgitters (2D)
b
a
a
b
T
0,0
0,0
0,0
b
a
T (2,2);
→ T (0,2)
13
Affine Transformation
(Translationsmatrix)
a‘ = 2a + b
b‘ = 2b
( a‘ b‘) = (a b) 2 0
1 1
(a‘ b‘ c‘) = (a b c) P
b
b‘
p
(2a)
0
a‘ a
0‘
(2b)
Linearteil der Transformation: Matrix P
Vektor der Verschiebung des Ursprungs: p (p1/p2/p3)
Affine Transformation: {P,p}
International Tables of Crystallography, Vo. A, Section 5.1.3, pp. 78-85
14
Affine Transformationen
15
Affine Transformationen des Gitters
Inversmatrix Q = P-1; QP = 1
(3);
1 =
1 0 0
0 1 0
0 0 1
Inversverschiebung: q = -Qp (4)
r = xa + yb + zc = (a b c) x
y
z
(4b)
(a‘ b‘ c‘) = (a b c) P
r = x‘a‘ + y‘b‘ + z‘c‘ = (a‘ b‘ c‘) x‘ = (a b c ) P x‘
y‘
y‘
z‘
z‘
x
y
z
=
x‘
P y‘ + p
z‘
(2)
(4c)
(5)
16
Affine Transformationen des Gitters
Metrik-tensor des Realraums:
a.a a.b a.c
g = a.b b.b b.c = (a b c)T .(a b c)
a.c b.c c.c
(1x3) (3x1)
(a‘ b‘ c‘) = (a b c) P
(2)
g‘ = (a‘ b‘ c‘)T .(a‘ b‘ c‘) =
= (( abc)P)T .(a b c)P
(MN)T = NT MT
= PT (abc)T .(abc) P = PT g P
g‘ = PT g P
(6)
17
Affine Transformationen des Gitters
a*
a
b* = g-1 b
c*
c
Basisvektoren des reziproken Gitters
(a* b* c*)T = g-1 (a b c)T
(7)
(a‘ b‘ c‘) = (a b c) P
(2)
(a*‘ b*‘ c*‘)T = g‘-1 (a‘ b‘ c‘)T
=
(PT
g
P)-1 ((a
b
c)P)T
g‘ = PT g P
(6)
= P-1 g-1 (PT)-1 PT (a b c )T
= P-1 g-1 1 (a b c )T = P-1 g-1 (a b c )T =
= P-1 (a* b* c*)T
(a*‘ b*‘ c*‘) T = Q (a* b* c*) T
(8)
18
Affine Transformationen des Gitters
Metrik-Tensor des reziproken Raums:
a*.a* a*.b* a*.c*
g* = a*.b* b*.b* b*.c* = (a*b* c*)T .(a* b* c*)
a*.c* b*.c* c*.c*
(a*‘ b*‘ c*‘) T = Q (a* b* c*) T
(8)
g*‘ = (a*‘ b*‘ c*‘)T .(a*‘ b*‘ c*‘) =
= Q(a* b* c*)T .(Q (a* b* c*)T)T =
= Q (a* b* c*)T .(a* b* c*) QT = Q g* QT
g*‘ = Q g* QT
(9)
19
Affine Transformationen des Gitters
Millersche Indezes
G = ha* + kb* + lc* = (h k l) a*
b*
c*
G = (h k l )(a* b* c*)T
(a*‘ b*‘ c*‘) T = Q (a* b* c*) T
(8)
(10a)
G = (h‘ k‘ l‘) (a*‘ b*‘ c*‘) T =
= (h‘ k‘ l‘) Q (a* b* c*)T
(10b)
(10c)
(h k l) = (h‘ k‘ l‘)Q ; (h‘ k‘ l‘) = (h k l)P
(10d)
20
Beispiel
a‘ = 2a + b
b‘ = 2b
(11)
b
Blaue Basisvektoren orthogonal
Grüne Basisvektoren nicht-orthogonal
2 0
2
1
0
1
b‘
p
a
0
a‘
PT =
P =
1 1
½
QP = 1
-½
0‘
0
Q =
x‘
-1
p =
0 1
1/2
+
-½ 1 2
-1/2
½
q=
-1
½
=
1
y‘
Gl. (5)
[1,2]
[1,2] → [1,1]
-½
x‘
x
y‘ = Q y + q
z‘
z
21
Beispiel
(11)
[1,2]
Gitterparameter: a, b, g = 90o
b
b‘
a2
0
0
b2
p
g=
a
a‘
0‘
2 1
a2
0
4a2 + b2
2 0
g‘ = PT g P =
Gl. 6
0
b2
=
0
1 0
b2 1
1
(symmetrisch)
b2
b2
Gitterparameter: a‘ = (g11‘) ½ = (4a2 + b2 ) ½ ;
b‘= (g22‘) ½ = b,
g‘ = arccos(b/ (4a2 + b2 ) ½ )
22
Beispiel
b*‘
Das reziproke Basis
V = ab
a* = 2p/a
b* = 2p/b
g* = 90o
4p2/a2
[1,2]
b
b‘
a
p
a‘
0
0
0‘
g* =
0
(11)
a*‘
4p2/b2
1/2
0
4p2/a2
p2/a2
0 1/2 -1/2
g*‘ = Q g* QT =
=
-1/2
1 0
4p2/b2
0
1
-p2/a2
-p2/a2
4p2/b2 + p2/a2
Gl.(9)
a*‘ = p/a
b*‘ = p(1/a2 + 4/b2) ½
Gl(10c)
(hk) = (11) → (3‘ 1‘)
23
Sind die Translationssymmetrie, Drehachsen
und Drehinversionsachsen ausreichend für die
Beschreibung der Symmetrie von Kristallstrukturen?
24
Kombination aus Translations- und
Punktsymmetrieoperationen
1. neue Symmetrieelemente
3. neue Arten von Gittern
2. die Kristallsysteme
25
1. Neue Symmetrieelemente
1.1 Gleitspiegelebenen
1.2 Shraubenachsen
Diese Symmetrieelemente formieren selbst keine Punktgruppen,
weil kein Punkt fest bleibt!!!
26
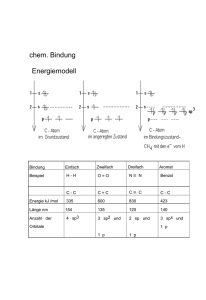
1.1 Gleitspiegelebenen
1
O
Hg
3
O
a
Hg
Hg
O
Hg
Hg
Hg
g
Verschiebung um v = a/2
gefolgt von Spiegelung
O
2
O
Achtung: v ist kein Translationsvektor und
eine Spiegelebene gibt es auch nicht!
zweimal Gleitspiegelung
g*g=a
27
Gleitspiegelebene a
Schriftsymbol a
Länge des Verschiebungsvektors a/2
Richtung der Verschiebung:
││ a
Gleitspiegelebene parallel
(010); (001), (011)
Graphisches Symbol:
-------
b
c
b
c
a ││ (010)
a
a ││ (001)
a
28
Gleitspiegelebene b
Schriftsymbol b
Länge des Verschiebungsvektors
b/2
Richtung der Verschiebung
││ b
Gleitspiegelebene parallel
(100); (001), (101)
Graphisches Symbol:
--------
c
b
c
a
a
b ││ (001)
b ││ (100)
b
a
b
b
29
Gleitspiegelebene c
Schriftsymbol c
Länge des Verschiebungsvektors
c/2
Richtung der Verschiebung
││ c
Gleitspiegelebene parallel
(100); (010), (110)
Graphisches Symbol:
………………..
c
c
(110)
b
a
30
Gleitspiegelebenen n
Schriftsymbol n
Länge des Verschiebungsvektors
Richtung der Verschiebung
(a+b)/2; (b+c)/2; (c+a)/2
││ (a+b); (b+c); (c+a)
Gleitspiegelebene parallel
(001) (100) (010)
Graphisches Symbol:
―∙― ∙ ― ∙ ― ∙
c
n
(001)
b
a
a+b
31
Gleitspiegelebenen d
Schriftsymbol d
Länge des Verschiebungsvektors
Richtung der Verschiebung
(a+b)/4; (b+c)/4; (c+a)/4
││ (a+b); (b+c); (c+a)
Gleitspiegelebene parallel
(001) (100) (010)
d
(001)
b
a
a+b
32
Gleitspiegelebenen
Symbol
Gleitkomponente v
a, b, c
a/2, b/2, c/2
n
eine von
(a+b)/2, (b+c)/2, (a+c)/2
d
eine von
(a+b)/4, (b+c)/4, (a+c)/4
33
1.2 Schraubenachsen mn
Drehkomponente
360°/m
kristallographische Schraubenachsen m = 2,3,4 und 6!!!!
Verschiebungskomponente
v = (n/m)t entlang Achse t
n = 1,2, … (m-1)
Translationsinvarianz entlang t:
mv = t
v ist kein Translationsvektor!!!
34
Zweizählige Schraubenachse
Drehwinkel:
180o
Translation:
½t
Schriftsymbol:
21
Graphisches Symbol:
2
t
1
(21 )2= t; (Drehachse: (2)2 = 1)
0
35
Dreizählige Schraubenachsen
Drehwinkel:
120o
Translationen:
1/3 t
Schriftsymbole:
31
oder
2/3 t
oder
Drehachse: 33 = 1
32
Graphische Symbole:
2‘
3
3
1
-t
2
t
t
1
(32 )3 = t
(31 )3 = t
2
0
0
36
Vierzählige Schraubenachsen
Drehwinkel:
90o
Translationen:
1/4 t
2/4 t
3/4 t
Schriftsymbole:
41
42
43
Graphische Symbole:
43
42
41
(41 )4 = t
(43 )4 = t
4
(42 )4 = t
3
t
2
1
v
v
v
0
Drehachse:
44
=1
37
Sechzählige Schraubenachsen
Drehwinkel:
60o
Translationen:
1/6 t
2/6 t
3/6 t
4/6 t
Schriftsymbole:
61
62
63
64
5/6 t
65
Graphische Symbole:
(61 )6 = t
(62 )6 = t
(63 )6 = t
Drehachse: 66 = 1
38
Sechzählige Schraubenachsen
Darstellung
39
42, 62, 64 enthalten 2
41, 43, 61, 65 enthalten 21
63 enthält 3
61, 64 enthalten 31
31, 41, 61 und 62 sind rechte Schraubenachsen
32, 43, 64 und 65 sind umgekehrt – linke Schraubenachsen
40
Sammlung von Symbolen von Symmetrieelementen;
senkrecht
senkrecht
Inplan
e
In-plane
In-plane
41
2. Kristallsysteme
AUSWIRKUNG VON PUNKTSYMMETRIEOPERATIONEN
AUF KRISTALLGITTER
2IIb
z. B. Spiegelebene und zweizählige Drehachse
b
b
a
-b
a
-c
-a
c
mb
c
Winkel(a,b)=Winkel(-a,b)
Winkel(-c,b)=Winkel(c,b)
,g = 90°
monoklines Gitter!
42
Kristallsysteme
AUSWIRKUNG VON PUNKTSYMMETRIE OPERATIONEN
AUF KRISTALLGITTER
mc
b
-c
= 90o
a
mb
ß = 90o
g = 90o
c
rhombisches Gitter
ma
43
Kristallsysteme
AUSWIRKUNG VON PUNKTSYMMETRIEOPERATIONEN
AUF KRISTALLGITTER
4 ll c
Länge von a = Länge von b
-a
2 || b
2 || a
= ß = g = 90o
a= b
2 || a: Winkel(b,c)=Winkel(-b,c)
2 || b: Winkel(a,c)=Winkel(-a,c)
42 Rotaion: Winkel(a,b)=Winkel(-a,b)
Tetragonalsystem
44
Kristallsysteme
AUSWIRKUNG VON PUNKTSYMMETRIEOPERATIONEN
AUF KRISTALLGITTER
Länge von a = Länge von b
a= b
4 ll c
Länge von a = Länge von c
4 || b
a= c
4 || a
= ß = g = 90o
Länge von b = Länge von c
b= c
Kubisches Kristallsystem
45
Kristallsysteme
System
kubisches
hexagonales
trigonales
tetragonales
rhombisches
monoklines
triklines
46
Kubisches Kristallsystem
g=
a2
0
0
0
a2
0
0
0
a2
Pyrite FeS2
Höchste Punktsymmetrie: m 3 m
47
Tetragonales Kristallsystem
g=
a2
0
0
0
a2
0
0
0
c2
Rutile
Höchste Punktsymmetrie: 4/m 2/m 2/m
48
Hexagonales Kristallsystem
g=
a2
-½a2
0
-½a2
a2
0
0
0
c2
Beryl
Höchste Punktsymmetrie: 6/m 2/m 2/m
49
Trigonales Kristallsystem
g=
a2
d
d
d
a2
d
d
d
a2
d = a2cos()
a1=a2=a3 = a
= ß = g = 90o
Calcite
Höchste Punktsymmetrie: 3 2/m
50
Rhombisches Kristallsystem
g=
a2
0
0
0
b2
0
0
0
c2
Topaz
Höchste Punktsymmetrie: 2/m 2/m 2/m
51
Monoklines Kristallsystem
g=
a2
0
accos(ß)
0
b2
0
accos(ß)
0
c2
ß
azurite
a=b=c
= g = 90o
Höchste Punktsymmetrie: 2/m
52
Triklines Kristallsystem
Turquoise
Höchste Punktsymmetrie: 1
53
3. Neue Gitter
Primitive und nicht-primitive Gitter
t = ua + vb + wc
(1)
v = a/2
a ││ (010)
b
1
●
●
●
●
2
3 a●
t ua vb wc t 0
●
●
●
●
●
●
(11) ; to ist Zentrierungsvektor
54
PRIMITIVE UND NICHT-PRIMITIVE GITTER
Primitives: t0 = 0
Innnenzentriertes(I): t0 = 0 und a/2+b/2+c/2; (body centered cubic – bcc)
einseitig Flächenzentriertes: (A,B,C): t0 = 0 und b/2+c/2, oder a/2+b/2, oder a/2+c/2
allseitig Flächenzentriertes (F): t0 = 0 und a/2+b/2, b/2+c/2 und a/2+c/2
(face centered cubic – fcc)
Rhomboedrisch-zentriertes (R): t0 = 0, 2/3a + 1/3b+1/3c und 1/3a+2/3b+2/3c
Wie viele Bravaisgitter gibt es?
55
Trigonal
(rhomboedrisch)
hexagonal
56
Kubisch-Flächenzentriertes Gitter
z
c‘ a‘
y
b‘
x
Primitive Zelle - rhomboedrische
P =
½
0
½
1
1
-1
-1
1
1
primitive Translationsvektoren:
a‘ = a/2+c/2, b‘ = a/2+b/2, c‘ = b/2+c/2
V‘ = ¼ V
Q =
½
½
0
0
½
½
1
-1
1
57
Kubisch-Innenzentriertes Gitter
c‘
b‘
primitive Zelle rhomboedrische
a‘
primitive Translationsvektoren:
a‘ = a/2+b/2-c/2, b‘= -a/2+b/2+c/2, c‘= a/2-b/2+c/2
V‘ = ½ V
P =
½
½
-½
-½
½
½
½
1
-½
Q
=
0
o28’
109
½
1
1
1
0
0
1
1
58
Klassifizierung der Punktgruppen hinsichtlich ihrer Auswirkungen auf
Translationsgruppen;
Kristallklassen, Kristallsysteme und Kristallfamilien
kubisch
hexagonal
tetragonal
trigonal
orthorhombisch
triklin
monoklin
59