1.5 Kongruenz und ¨Ahnlichkeit
Werbung

19
1.5
Kongruenz und Ähnlichkeit
Definition
Sei An der affine Standardraum zum Vektorraum Rn . Eine Abbildung F : An →
An heißt Isometrie, falls d(F (X), F (Y )) = d(X, Y ) für alle X, Y ∈ An gilt.
Es ist offensichtlich, dass alle Isometrien injektiv sind: Ist F (P ) = F (Q), so ist
d(P, Q) = d(F (P ), F (Q)) = 0, also P = Q.
−→
−→
Ist O der Nullpunkt, v = OP und w = OQ, so ist d(P, Q) = kw − vk.
Jeder Abbildung F : An → An entspricht eine Abbildung Fe : Rn → Rn (und
−→
umgekehrt) mit F (X) = O + Fe(OX), also F (X) − O = Fe(X − O). Ist F eine
−→
−→
Isometrie, so ist auch Fe eine Isometrie, denn für v = OX und w = OY gilt:
−→
−→
kFe(w) − Fe(v)k = kOF (Y ) − OF (X)k = d(F (X), F (Y ))
= d(X, Y ) = kw − vk.
Es reicht also, Isometrien im Rn zu untersuchen.
1.5.1 Beispiele
1.5.1.1. Die identische Abbildung idRn : Rn → Rn ist eine Isometrie.
1.5.1.2. Sind F1 , F2 zwei Isometrien, so ist auch F2 ◦ F1 eine Isometrie.
1.5.1.3. Ist v ∈ Rn , so ist die Translation T : x 7→ x + v eine Isometrie. Es ist
nämlich
kT (y) − T (x)k = k(y + v) − (x + v)k = kx − yk.
Ende der Beispiele
Ist F : Rn → Rn eine beliebige Isometrie und v = F (0), so ist auch Fe(x) :=
F (x) − v eine Isometrie. Also setzt sich jede Isometrie aus einer Translation und
einer speziellen Isometrie zusammen, die 0 auf 0 abbildet.
Satz: F : Rn → Rn ist genau dann eine Isometrie, wenn es eine orthogonale
Matrix A und einen Vektor v gibt, so dass für alle x ∈ Rn gilt:
F (x) = x · A> + v.
Beweis:
1) Sei F eine Isometrie. Man kann voraussetzen, dass F (0) = 0 ist. Weil
x•y =
1
1
kxk2 + kyk2 − kx − yk2 = d(0, x)2 + d(0, y)2 − d(x, y)2
2
2
20
1 Grundlagen der Schulgeometrie
ist, ist das Skalarprodukt invariant unter F .
Ist {e1 , . . . , en } die Basis der Einheitsvektoren im Rn , so ist {F (e1 ), . . . , F (en )}
eine Orthonormalbasis des Rn , denn es ist
kF (ei )k2 = F (ei ) • F (ei ) = ei • ei = 1 und F (ei ) • F (ej ) = ei • ej = 0 für i 6= j.
Pn
Es gibt reelle Zahlen aji , so dass F (ei ) =
j=1 aji ej ist, für i = 1, . . . , n. Sei
A := (aij ) die aus diesen Zahlen gebildete Matrix. Dann gilt:
n
X
δik = F (ei ) • F (ek ) =
aji ej
n
X
•
j=1
=
=
X
j,l
n
X
aji alk δjl =
n
X
alk el
l=1
aji ajk
j=1
(A> )ij · (A)jk =
A> · A
ik
,
j=1
also A> · A = En (= Einheitsmatrix). Damit ist A eine orthogonale Matrix.1
Nun sei fA : Rn → Rn die durch fA (x) := x · A> definierte lineare Abbildung zur
Matrix A. Es soll gezeigt werden, dass F = fA ist, dass also F insbesondere linear
ist.
Ist x ∈ Rn , so ist
x = (x1 , . . . , xn ) =
n
X
xi ei mit xi = x • ei ,
i=1
und auf der anderen Seite gibt es auch eine Darstellung
F (x) =
n
X
x∗i F (ei ) mit irgendwelchen Koeffizienten x∗i .
i=1
Weil die ei und die F (ei ) jeweils Orthogonalbasen bilden, folgt jetzt aber:
x∗i
= F (x) F (ei ) = x ei = xi , also F
•
•
n
X
xi e i =
i=1
n
X
xi F (ei ).
i=1
Hieraus würde schon direkt folgen, dass F linear ist, wir schauen aber noch die
Matrizen-Darstellung an. Es ist
F (x) =
n
X
i=1
1
xi F (ei ) =
n
X
i=1
xi
n
X
j=1
aji ej =
n X
n
X
j=1
aji xi ej
i=1
Am Ende des Kapitels finden Sie einen kurzen Anhang über Matrizen und den Zusammenhang
mit linearen Abbildungen.
1.5
Kongruenz und Ähnlichkeit
und andererseits fA (x) =
Pn
21
j=1 cj ej
mit
>
cj = fA (x) • ej = (x · A )j =
n
X
>
xi (A )ij =
i=1
n
X
xi aji .
i=1
Damit ist F = fA .
2) Die Umkehrung folgt sehr einfach. Es ist x • y = x · y> und deshalb
(x · A> ) • (y · A> ) = x · A> · A · y> = x · En · y> = x • y.
Also lässt fA das Skalarprodukt (und damit auch die Abstände) invariant.
1.5.2 Beispiele
1.5.2.1. Sei n = 2. Ist α ∈ R, so ist die Matrix
cos α − sin α
Dα :=
sin α
cos α
orthogonal. Also ist jede Drehung (um den Nullpunkt) Rα (x) := x · Dα> eine Isometrie des R2 .
1.5.2.2. Ist n = 2, so ist die Spiegelung
S(x1 , x2 ) := (x1 , −x2 ) = (x1 , x2 ) ·
1
0
0
−1
>
(an der x-Achse) eine Isometrie.
Ende der Beispiele
Definition
Zwei Teilmengen M1 , M2 ⊂ R2 heißen kongruent, falls es eine Isometrie F :
R2 → R2 mit F (M1 ) = M2 gibt.
Eine Abbildung g : R2 → R2 heißt zentrische Streckung, falls es einen Punkt
m und eine Zahl k > 0 gibt, so dass gilt:
g(x) = m + k(x − m)
(und damit insbesondere g(m) = m).
Eine Abbildung H : R2 → R2 heißt Ähnlichkeitsabbildung, falls sie sich aus
Isometrien und zentrischen Streckungen zusammensetzt. Zwei Teilmengen des R2
heißen ähnlich, falls sie durch eine Ähnlichkeitsabbildung ineinander überführt
werden.
22
1 Grundlagen der Schulgeometrie
Satz: Seien x 6= y zwei Punkte im Rn , sowie F : Rn → Rn eine Isometrie.
Dann bildet F die Gerade durch x und y auf die Gerade durch F (x) und F (y)
ab. Liegt z zwischen x und y, so liegt auch F (z) zwischen F (x) und F (y).
Beweis: Die Verbindungsgerade durch x und y ist die Menge L = {z = x + t(y −
x) : t ∈ R}. Ist F (u) = u · A> + v, so ist
F (z) = x · A> + t(y · A> − x · A> ) + v = F (x) + t(F (y) − F (x)).
Daraus folgt die Behauptung.
Zwei Dreiecke ABC und A0 B 0 C 0 heißen kongruent, wenn man ihre Ecken so mit
A, B, C bzw. A0 , B 0 , C 0 bezeichnen kann, dass es eine Isometrie F : R2 → R2 gibt,
die A auf A0 , B auf B 0 und C auf C 0 abbildet. Offensichtlich werden dann auch
die entsprechenden Seiten aufeinander abgebildet, und weil F Abstände invariant
lässt, ist a = a0 , b = b0 und c = c0 . Mit Hilfe der Cosinussätze folgt außerdem, dass
auch die entsprechenden Winkel gleich sind. Umgekehrt sind zwei Dreiecke schon
dann kongruent, wenn eine der folgenden Aussagen wahr ist:
1. SSS: Alle drei Seiten sind gleich.
2. SWS: Zwei Seiten und der von ihnen eingeschlossene Winkel sind gleich.
3. SSW: Zwei Seiten und der der längeren Seite gegenüberliegende Winkel sind
gleich.
4. WSW: Eine Seite und die beiden anliegenden Winkel sind gleich.
Beweis: 1) Es soll gezeigt werden: Ist a = a0 , b = b0 und c = c0 , so gibt es eine
Isometrie, die A auf A0 , B auf B 0 und C auf C 0 abbildet.
Durch Translationen kann man zunächst erreichen, dass A = A0 = (0, 0) ist, und
durch Drehungen um den Nullpunkt kann man erreichen, dass B = B 0 = (c, 0) ist.
O.B.d.A. liege nun C in der oberen Halbebene (von C 0 kann man das dann noch
nicht sagen). Weil auch die sich entsprechenden Winkel gleich sind, sind entweder
beide Dreiecke spitzwinklig oder beide stumpfwinklig. Es sei hier der spitzwinklige
Fall angenommen, der andere wird analog behandelt.
Sei h die Höhe von C auf c, p und q die Hypotenusen-Abschnitte mit p + q = c.
Dann ist C = (p, h), und das Dreieck ABC sieht folgendermaßen aus:
C = (p, h)
b
A
a
h
p
q
B
1.5
Kongruenz und Ähnlichkeit
23
Nun kann man p und h berechnen. Es ist nämlich h2 = b2 − p2 und a2 = q 2 + h2 =
(c − p)2 + h2 = c2 + p2 − 2pc + h2 = c2 + b2 − 2pc, also
p=
1 2
(c + b2 − a2 )
2c
und
p
h = ± b2 − p 2 .
Weil es sich um positive Längen handelt, muss bei h das Plus-Zeichen gewählt
werden.
Die gleiche Rechnung ergibt sich beim Dreieck A0 B 0 C 0 . Entweder ist C = C 0 , oder
die beiden Punkte liegen spiegelbildlich zur x-Achse. Wenn sich aber C und C 0 auf
verschiedenen Seiten der x-Achse befinden, dann wendet man die Spiegelung an
der x-Achse an, die C auf C 0 abbildet und A und B fest lässt.
2) Sind etwa a, b und der eingeschlossene Winkel γ gegeben, so liefert der Cosinussatz mit der Formel
p
c = a2 + b2 − 2ab cos γ
die fehlende dritte Seite c. Der Rest folgt mit (1).
3) Gegeben seien die Seiten c und a, sowie der Winkel α. Dann stellt der Cosinussatz
a2 = b2 + c2 − 2bc cos α eine quadratische Gleichung für die unbekannte Seite b dar:
b2 + (−2c cos α) · b + (c2 − a2 ) = 0.
Die Lösungsformel für die quadratische Formel liefert
b=
p
p
1
2c cos α ± 4c2 cos2 α − 4(c2 − a2 ) = c cos α ± a2 − c2 sin2 α .
2
Nach Voraussetzung ist a > c (weil α der größeren Seite gegenüberliegen soll).
Dann ist erst recht a > c sin α und daher a2 − c2 sin2 α > 0. Die Gleichung hat
also zwei Lösungen.
Allerdings sind nur positive Lösungen brauchbar. Die Lösung
p
2
b = c cos α − a − c2 sin2 α wird nur dann ≥ 0, wenn c2 cos2 α ≥ a2 − c2 sin2 α ist.
Dafür müsste aber c ≥ a sein, und das war gerade ausgeschlossen. Das zeigt, dass
es eine eindeutig bestimmte Lösung gibt. Und aus den Seiten a, b und c gewinnt
man wieder alle anderen Größen des Dreiecks.
4) Gegeben seien die Winkel α und β, sowie die dazwischen liegende Seite c. Da
α + β + γ = π ist, erhält man aus α und β den Winkel γ. Nun kommt man am
besten mit dem Sinussatz“ weiter, denn der besagt:
”
sin β
sin γ
sin α
=
=
.
b
c
a
Sind also die Winkel und die eine Seite c bekannt, so kann man daraus a und b
berechnen, und dann wieder (1) anwenden.
Nun bleibt noch der Beweis des Sinussatzes nachzutragen.
Zeichnet man im Dreieck die Höhen ha von A auf a und hb von B auf b ein, so gilt:
24
1 Grundlagen der Schulgeometrie
b sin γ = ha = c sin β
und
a sin γ = hb = c sin α.
γ
b
γ
a
ha
hb
β
α
c
c
Daraus folgt offensichtlich der Sinussatz.
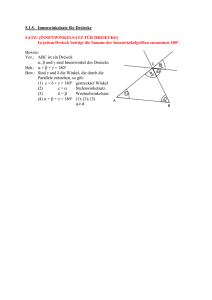
Die Strahlensätze: Wenn zwei sich in einem Punkt P schneidende Geraden g
und h von zwei parallelen Geraden p und q in Punkten A, A0 bzw. B, B 0 getroffen
werden, dann gilt:
1. d(P, A) : d(A, B) = d(P, A0 ) : d(A0 , B 0 ),
2. d(P, A) : d(P, B) = d(P, A0 ) : d(P, B 0 ),
3. d(A, A0 ) : d(B, B 0 ) = d(P, A) : d(P, B).
Beweis:
q
h
B
p
0
w0 − w
A0
v0 − v
v0
P =O
v
g
A
B
−→
Wir schreiben die Geraden vektoriell. Dabei sei P = O der Nullpunkt, v = OA,
−→
−→
−→
w = OB, v0 = OA0 und w0 = OB 0 . Dann gilt:
g = {x = tv : t ∈ R}
und
h = {x = tv0 : t ∈ R}.
Es gibt Zahlen t1 , t2 ∈ R, so dass w = t1 v und w0 = t2 v0 ist. Dann ist w0 − w =
t2 v0 − t1 v, und es gibt einen Faktor s mit w0 − w = s(v0 − v) (weil p und q
parallel sind). Weil sich g und h schneiden, sind v und v0 linear unabhängig. Aus
der Gleichung t2 v0 − t1 v = w0 − w = sv0 − sv (also (t2 − s)v0 − (t1 − s)v = 0) folgt
dann, dass t2 − s = t1 − s = 0 ist, also t1 = t2 = s. Damit ist
d(O, B) : d(O, A) = t1 : 1 = t2 : 1 = d(O, B 0 ) : d(O, A0 ) = s : 1 = d(B 0 , B) : d(A0 , A)
und
d(O, A) : d(A, B) = 1 : (t1 − 1) = 1 : (t2 − 1) = d(O, A0 ) : d(A0 , B 0 ).
1.5
Kongruenz und Ähnlichkeit
25
Damit ist alles gezeigt.
Satz: Zwei Dreiecke ABC und A0 B 0 C 0 sind genau dann ähnlich, wenn eine der
beiden Bedingungen erfüllt ist:
1. α = α0 , β = β 0 und γ = γ 0 .
2. a : b = a0 : b0 , a : c = a0 : c0 und b : c = b0 : c0 .
a) Sind die sich entsprechenden Winkel gleich, so kann man eine Isome-
Beweis:
*
*
*
trie finden, die A0 auf A, den Strahl A0 B 0 auf den Strahl AB und den Strahl A0 C 0
*
auf den Strahl AC abbildet. Weil β 0 = β ist, wird dabei die Gerade B 0 C 0 auf eine
Parallele zu BC abgebildet. Wenn nun c = c0 k ist, dann ist nach dem Strahlensatz
auch b = b0 k und a = a0 k. Damit ist a/b = a0 /b0 , a/c = a0 /c0 und b/c = b0 /c0 , und
außerdem gehen die Dreiecke (bis auf die zuvor angewandte Isometrie) durch eine
zentrische Streckung auseinander hervor. Also sind sie ähnlich.
b) Die zweite Bedingung bedeutet, dass es ein k ∈ R gibt, so dass a/a0 = b/b0 =
c/c0 = k ist, also a = a0 k, b = b0 k und c = c0 k. Aus dem Cosinussatz folgt dann,
dass die entsprechenden Winkel gleich sind. Zum Beispiel ist
1
1 2
(b + c2 − a2 ) =
(b0 k)2 + (c0 k)2 − (a0 k)2
cos α =
0
0
2bc
2(b k)(c k)
1
0 2
0 2
0 2
(b
)
+
(c
)
−
(a
)
= cos α0 .
=
2b0 c0
Auf jedem Fall sind auch diesmal die Dreiecke ähnlich.
c) Wenn die Dreiecke durch eine zentrische Streckung auseinander hervorgehen,
dann gibt es ein k, so dass a = a0 k, b = b0 k und c = c0 k ist. Daraus folgt die
Bedingung (2) und – wie in (b) gezeigt – auch Bedingung (1). Da sich eine Ähnlichkeitsabbildung aus Isometrien und zentrischen Streckungen zusammensetzt, folgt:
Sind ABC und A0 B 0 C 0 ähnlich, so sind (a) und (b) erfüllt.
Anhang:
Ist A = (aij ) =
a11
a21
..
.
a12 · · ·
a22 · · ·
..
.
a1m
a2m
..
.
eine Matrix mit n Zeilen und m Spalten,
an1 a12 · · · anm
so ist A = (aji ) die an der Diagonalen gespiegelte Matrix.
>
Manchmal schreibt man auch (A)ij statt aij . Das Produkt einer (n, m)-Matrix A
mit einer (m, r)-Matrix B ist die (n, r)-Matrix A · B mit
(A · B)ik :=
m
X
j=1
(A)ij · (B)jk , für i = 1, . . . , n und k = 1, . . . , r.
26
1 Grundlagen der Schulgeometrie
Es ist (A · B)> = B > · A> .
Ist x = (x1 , . . . , xn ) ein Zeilenvektor, so ist x> der gleiche Vektor, aber als Spalte
geschrieben.
Schreibt man die Vektoren des Rn als Spalten, so gibt es zu jeder linearen Abbildung F : Rm → Rn eine (n,m)-Matrix A = (aij ), so dass F (x> ) = A · x>
ist:
x
a
·
·
·
a
x
a
x
+
·
·
·
+
a
x
1
11
1
1m
m
1
11
1m
..
..
..
F ... = ...
· . =
.
.
.
xm
an1 · · · anm
xm
an1 x1 + · · · + anm xm
Das Bild des i-ten Einheitsvektors (ei )> = (0, . . . , 0, 1, 0, . . . , 0)> ist die i-te Spalte
von A.
Schreibt man die Vektoren als Zeilen, so ist F (x) = F (x> )> = (A · x> )> = x · A> .
Das euklidische Skalarprodukt kann man auch mit Hilfe des Matrizenprodukts
beschreiben, es ist x • y = x · y> = x1 y1 + · · · + xn yn . Gilt F (x) • F (y) = x • y für
alle x, y (wobei F eine lineare Abbildung mit F (x) = x · A> ist), so ist
>
δij = ei • ej = F (ei ) • F (ej ) = (ei · A> ) · (ej · A> )> = ei · (A> · A) · e>
j = (A · A)ij ,
also A> ·A = En die Einheitsmatrix. Man nennt A dann orthogonal, insbesondere
ist det(A) = ±1.