T3p Elektrodynamik - Fakultät für Physik
Werbung

LMU Fakultät für Physik
T3p Elektrodynamik
Dr. Michael Haack
zuletzt erstellt am 12. Juli 2016
Inhaltsverzeichnis
1. Einführung
1.1. Grundgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2. Gradient, Divergenz, Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2. Elektrostatik
2.1. Coulombgesetz . . . . . . . . . . . . . . . .
2.2. Elektrisches Feld . . . . . . . . . . . . . . .
2.3. Feldgleichungen . . . . . . . . . . . . . . . .
2.4. Beispiel: Die homogen geladene Kugel . . .
2.5. Elektrostatische Energie . . . . . . . . . . .
2.6. Randwertprobleme . . . . . . . . . . . . . .
2.6.1. Methode der Bildladung . . . . . . .
2.6.2. Influenzladung . . . . . . . . . . . .
2.6.3. Kondensator . . . . . . . . . . . . .
2.6.4. Separation der Variablen . . . . . .
2.7. Beispiel: Leitende Kugel im homogenen Feld
2.8. Multipolentwicklung . . . . . . . . . . . . .
1
1
2
.
.
.
.
.
.
.
.
.
.
.
.
7
7
8
9
12
15
17
20
21
22
24
28
30
3. Magnetostatik
3.1. Vektorpotential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Multipolentwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
40
42
4. Maxwellgleichungen
4.1. Induktivität . . . . . . . . . . . . . .
4.2. Energiebilanz . . . . . . . . . . . . .
4.3. Ebene Wellen . . . . . . . . . . . . .
4.4. Randbedingungen an Metallwänden
4.5. Elektromagnetische Potentiale . . . .
4.6. Lösung der Wellengleichung . . . . .
4.7. Felder einer bewegten Punktladung .
45
47
48
51
58
59
60
63
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5. Spezielle Relativiätstheorie
67
6. Elektrodynamik in Materie
6.1. Elektrische Felder in Dielektrika (Nichtleiter) . . . . . . . . . . . . . . . . . . . . . . . . .
6.2. Magnetfelder in magnetisierter Materie . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3. Maxwellgleichungen für makroskopische Felder in Materie . . . . . . . . . . . . . . . . . .
79
79
80
81
A. Appendix: Herleitung des magnetischen Dipolmoments
83
KAPITEL 1.
Einführung
In diesem Kapitel wird eine Einführung in die Elektrodynamik gegeben. Dieses Skript verwendet SIEinheiten. Relevante Sekundärliteratur: Fliessbach, Elektrodynamik und Griffiths, Elektrodynamik.
1.1. Grundgleichungen
Die elektromagnetische Wechselwirkung (WW) ist eine von vier bekannten, fundamentalen Wechselwirkungen:
• Gravitation [NEWTON, EINSTEIN]
• Elektromagnetismus [OERSTED, AMPÈRE, FARADAY, MAXWELL]
• schwache Wechselwirkung [GLASHOW, SALAM, WEINBERG, radioaktiver Zerfall]
• starke Wechselwirkung [GROSS, POLITZER, WILCZEK, Kernkraft]
Die Elektrodynamik befasst sich mit elektrischen und magnetischen Feldern, namentlich
(i) ihre Erzeugung durch Ladungen und Ströme
(ii) ihre Rückwirkung auf Materie
(iii) ihre Ausbreitung (elektromagnetische Wellen, Licht)
Die Grundgleichungen der Elektrodynamik sind:
(i) & (iii): MAXWELL-Gleichungen
⃗ ·E
⃗ = ϱ
∇
ϵ0
⃗
⃗ ×E
⃗ = − ∂B
∇
∂t
⃗
⃗
∇·B =0
⃗
⃗ ×B
⃗ = µ0⃗j + µ0 ϵ0 ∂ E
∇
∂t
mit
ϱ
2
ϵ0 = 8.85 · 10−12 NCm2
⃗j
µ0 = 4π · 10−7 AN2
(1.1.1)
(1.1.2)
(1.1.3)
(1.1.4)
Ladungsdichte
“Dielektrizitätskonstante des Vakuums”
Stromdichte
“Permeabilität des Vakuums”.
(ii): COULOMB und LORENTZ-Kraft:
Bemerkungen:
⃗ + q⃗v × B
⃗
F⃗ = q E
(1.1.5)
1
Vorlesungsskript T3p Elektrodynamik
KAPITEL 1. EINFÜHRUNG
⃗ = E(⃗
⃗ r, ⃗t), B
⃗ = B(⃗
⃗ r, ⃗t) und Quellen ϱ = ϱ(⃗r, t), ⃗j = ⃗j(⃗r, t) von Raum und
(1) Im Allgemeinen hängen E
Zeit ab.
⃗ B,
⃗ ϱ, ⃗j zeitunabhängig ⇒ E
⃗ und B
⃗ entkoppeln:
Spezialfall: E,
⃗ ·E
⃗ = ϱ
∇
ϵ0
,
⃗ ×E
⃗ =0
∇
(Elektrostatik)
(1.1.6)
(M agnetostatik)
(1.1.7)
und
⃗ ·B
⃗ = ϱ
∇
ϵ0
,
⃗ ×B
⃗ = µ0⃗j
∇
(2) Der Elektromagnetismus ist das erste Beispiel einer vereinheitlichten Theorie, da sie elektrische und
magnetische Phänomene in einer Theorie vereint.
1.2. Gradient, Divergenz, Rotation
(i) Der Gradient eines skalaren Feldes ϕ(⃗r) ist ein Vektorfeld.
mit
⃗ r) · d⃗r = ϕ(⃗r + d⃗r) = ϕ(⃗r)
∇ϕ(⃗
·
d⃗r
Skalarprodukt
infinitesimales Wegelement
Anschaulich:
(1.2.1)
(|d⃗r| → 0)
⃗
∇ϕ:
• senkrecht auf Flächen ϕ(⃗r) = const.
• zeigt in Richtung des stärksten Anstiegs
• Betrag proportional zum Anstieg
⃗ ist ein Skalarfeld
(ii) Divergenz eines Vektorfeldes A
1
∆V →0 ∆V
⃗ · A(⃗
⃗ r) = lim
∇
mit
∆V
∆S
d⃗a
Anschaulich: (∆V kugelförmig)
2
!
⃗
d⃗a · A
∆S
Volumenelement bei ⃗r
Oberfläche von ∆V
Oberflächenelement (zeigt nach außen)
(1.2.2)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 1. EINFÜHRUNG
⃗ · A:
⃗ Maß für Quellstärke
⇒∇
⃗ ist Vektorfeld. Die Komponente entlang eines (beliebigen) Einheits(iii) Rotation eines Vektorfeldes A
vektor ⃗n lautet:
!
1
⃗
⃗
⃗
d⃗l · A
(1.2.3)
⃗n · (∇ × A)(⃗r) = lim
∆a→0 ∆a
∆C
mit
∆⃗a
∆a
∆C
d⃗l
Flächenelement bei ⃗r, ∆⃗a||⃗n
= |∆⃗a|
Rand der Fläche
Wegelement entlang ∆C(Rechte-Hand-Regel)
Anschaulich: (kreisförmige Fläche; ⃗n zeige aus Seitenebene des Skriptes heraus)
⃗ × A|:
⃗ Maß für Wirbelstärke
⇒ |∇
Alle Definitionen sind koordinatenunabhängig.
Kartesische Koordinaten
(i)
(ii)
⎛
⎞
∂x ϕ
⃗ = ⎝ ∂y ϕ ⎠
∇ϕ
∂z ϕ
⃗ ·A
⃗ = ∂Ax + ∂Ay + ∂Az
∇
∂x
∂y
∂z
(1.2.4)
(1.2.5)
3
Vorlesungsskript T3p Elektrodynamik
KAPITEL 1. EINFÜHRUNG
(iii)
⃗ × A)
⃗ x =
(∇
i
3
&
j,k=1
∂Ak
ϵijk
,
∂xj
⎛ ⎞ ⎛ ⎞
x1
x
mit ⎝x2 ⎠ ∼
= ⎝y ⎠
x3
x
(1.2.6)
ϵ ist das LEVI-CIVITA-Symbol, das zyklische und antizyklische Permutationen von ijk unterscheidet:
⎧
⎨ +1 für zyklische Permutationen von ijk
0
falls i = j oder j = k oder k = i
ϵijk =
⎩
−1 für antizyklische Permutationen von ijk
Andere Koordinatensysteme:
(i) Kugelkoordinaten: (r, θ, ϕ) mit θ: Polarwinkel und ϕ: Azimutwinkel, r ∈ [0, ∞[, θ ∈ [0, π], ϕ ∈ [0, 2π[
e⃗r , e⃗θ , e⃗ϕ Einheitsvektoren (orthonormiertes Dreibein)
x=
y=
z=
⎛
⎞
sin θ cos ϕ
e⃗r = ⎝ sin θ sin ϕ ⎠ ,
cos θ
r sin θ cos ϕ
r sin θ sin ϕ
r cos θ
⎛
⎞
cos θ cos ϕ
e⃗θ = ⎝ cos θ sin ϕ ⎠ ,
− sin θ
α
⃗ = αr e⃗r + αθ e⃗θ + αϕ e⃗ϕ
(1.2.7)
⎞
− sin ϕ
e⃗ϕ = ⎝ cos ϕ ⎠
0
⎛
(1.2.8)
(1.2.9)
Quelle: https://de.wikipedia.org/wiki/Kugelkoordinaten
infinitesimaler Verschiebungsvektor:
d⃗l = dre⃗r + rdθe⃗θ + r sin θdϕe⃗ϕ
(1.2.10)
d3 r = r2 sin θdrdθdϕ
(1.2.11)
infinitesimales Volumenelement:
4
Vorlesungsskript T3p Elektrodynamik
KAPITEL 1. EINFÜHRUNG
(ii) Zylinderkoordinaten (s, ϕ, z) mit ϕ: Azimutwinkel, s ∈ [0, ∞[, ϕ ∈ [0, 2π[, z ∈] − ∞, ∞[
e⃗s , e⃗θ , e⃗z Einheitsvektoren (orthonormiertes Dreibein)
x = s cos ϕ, y = s sin ϕ, z = z
⎞
⎛
⎞
⎛ ⎞
cos ϕ
− sin ϕ
0
e⃗s = ⎝ sin ϕ ⎠ , e⃗ϕ = ⎝ cos ϕ ⎠ , e⃗z = ⎝ 0 ⎠
0
0
1
⎛
(1.2.12)
(1.2.13)
infinitesimaler Verschiebungsvektor:
d⃗l = dse⃗s + sdϕe⃗ϕ + dz e⃗z
(1.2.14)
d3 r = sdsdϕdz
(1.2.15)
infinitesimales Volumenelement:
Integralsätze
Aus Definitionen von Gradient, Divergenz und Rotation folgt durch Integration:
*
⃗ = Φ(r⃗e ) − Φ(r⃗a )
d⃗l · ∇Φ
mit r⃗a , r⃗e : Anfangs- und Endpunkt der Linie
1.
C
2. Satz von Gauß:
*
⃗ ·A
⃗=
d3 r ∇
3. Satz von Stokes:
⃗
d⃗aA
wobei V ein geschlossenes Volumen mit Oberfläche S ist.
S
V
*
!
⃗ × A)
⃗ =
d⃗a · (∇
S
!
⃗
d⃗l · A
wobei S eine Fläche mit Rand C ist.
C
Ein weiterer wichtiger Differentialoperator ist der Laplace-Operator :
in kartesischen Koordinaten
⃗ · (∇Φ)
⃗
∆Φ(⃗r) = ∇
∆Φ =
3
&
∂2
Φ
∂x2i
i=1
Wirkung auf Vektoren in kartesischen Koordinaten:
⎛
⎞
∆Ax
⃗ = ⎝ ∆Ay ⎠
∆A
∆Az
(1.2.16)
(1.2.17)
(1.2.18)
5
Vorlesungsskript T3p Elektrodynamik
KAPITEL 1. EINFÜHRUNG
Allgemein:
Wichtige Relationen:
⃗=∇
⃗ · (∇
⃗ · A)
⃗ −∇
⃗ × (∇
⃗ × A)
⃗
∆A
(i)
∆
⎡
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
kart. Koordinaten:
1
= −4πδ (3) (⃗r)
|⃗r|
(1.2.19)
(s. Übung)
(1.2.20)
δ (3) (⃗r) = δ(x)δ(y)δ(z)
*∞
dxf (x)δ(x) = f (0),
δ(x) =
−∞
*
d3 rf (⃗r)δ (3) (⃗r − ⃗a) = f (⃗a)
R3
.
0,
∞,
x ̸= 0
x=0
⎤
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
(1.2.21)
⃗ (⃗r) sei ein Vektorfeld mit |V
⃗ | →r→∞ 0 und |∇
⃗ · V | und |∇
⃗ ×V
⃗ | gehen für
(ii) Helmholtz-Theorem: V
1
r → ∞ schneller gegen null als r2 . Dann gilt:
⃗ (⃗r) = ∇
⃗ ×A
⃗ − ∇Φ
⃗
V
mit
⃗ r)
A(⃗
=
1
4π
*
d3 r ′
R3
Φ(⃗r)
=
1
4π
*
⃗′ × V
⃗ (r⃗′ )
∇
|⃗r − r⃗′ |
⃗′ · V
⃗ (r⃗′ )
3 ′∇
d r
R3
(1.2.22)
(1.2.23)
|⃗r − r⃗′ |
⃗ (⃗r) eindeutig durch die Quellen ∇
⃗ ·V
⃗ und Wirbel ∇
⃗ ×V
⃗ festgelegt (Beweis: siehe Anhang B
D.h. V
⃗ ):
im Griffiths). Außerdem (unabhängig von asymptotischem Verhalten von V
⃗ ×V
⃗
∇
⃗
=0 ⇔V
⃗
= −∇Φ
⃗ ·V
⃗
∇
⃗
=0 ⇔V
⃗ ×A
⃗
=∇
(1.2.24)
(“⇐”: siehe Übung)
⃗ nicht schnell genug abfällt, ist V
⃗ nicht eindeutig durch seine Divergenz und
Bemerkung: Falls V
Rotation bestimmt. In dem Fall braucht man zusätzlich Symmetrien.
6
KAPITEL 2.
Elektrostatik
Grundfrage der Elektrodynamik:
Gegeben: (Quell-) Ladungen q1 , . . . , qN mit im Allgemeinen zeitabhängigen Positionen und Geschwindigkeiten. Gesucht: Kraft auf Probeladung Q.
Vereinfacht durch Superpositionsprinzip.
Aber: Antwort im Allgemeinen sehr kompliziert (hängt von Geschwindigkeit und Beschleunigung der qi
zu früheren Zeitpunkten ab, vgl. Formel (10.67) in Griffiths). Daher zunächst: statische Quell-Ladungen.
2.1. Coulombgesetz
Zunächst: Coulombkraft zwischen zwei statischen, punktförmigen Ladungen q⃗1 , q⃗2 .
F⃗1 =
r⃗1 − r⃗2
1
q1 q 2
= −F⃗2 ,
4πϵ0
|r⃗1 − r⃗2 |
(2.1.1)
wobei F1 , F2 die Kräfte auf q1 und q2 sind.
Bemerkungen:
(i) Zentralkraft (entlang Verbindungslinie)
(ii) genügt Gegenwirkungsprinzip (3. Newton’sches Axiom): F⃗1 = −F⃗2
(iii) proportional zum Produkt der Ladungen (wichtig für Superpositionsprinzip)
(iv) invers proportional zum Quadrat des Abstands, r12
⇒ gleiches Verhalten wie Gravitationskraft.
Vgl. Kräfte zwischen Elektron und Proton, Abstand 0.53 Å (Bohr’scher Radius, d.h. Radius des
Wasserstoffatoms im niedrigsten Energieniveau, 1 Å = 10−10 m)
2
8 · 10−8 N
Coulomb
|F⃗e−p | =
(2.1.2)
−47
4 · 10 N
Gravitation
Superpositionsprinzip: Verallgemeinerung zu Punktladungen {q1 , ..., qN } bei {r⃗1 , ..., r⃗N }
F⃗i =
N
&
j̸=i
1
r⃗i − r⃗j
q i qj
,
4πϵ0
|r⃗1 − r⃗2 |3
(2.1.3)
wobei F⃗i die Kraft auf die Ladung q⃗i ist.
7
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
2.2. Elektrisches Feld
N statische Quellladungen qi , i = 1, . . . N bei r⃗i , i = 1, . . . N . Kraft auf die Probeladung Q bei ⃗r (die nicht
notwendigerweise statisch ist):
F⃗ (⃗r) =
Dies definiert das elektrische Feld
N
1 &
⃗r − r⃗i
⃗ r).
Qqi
≡ QE(⃗
4πϵ0 i=1
|⃗r − r⃗i |
F⃗ (⃗r)
.
Q
Damit lässt sich das elektrische Feld von N Punktladungen angeben:
⃗ r)
E(⃗
⃗ r) =
E(⃗
Z.B. positive Punktladungen bei r⃗1 = ⃗0
=
N
⃗r − r⃗i
1 &
.
qi
4πϵ0 i=1 |⃗r − r⃗i |3
1 q
e⃗r .
4πϵ0 r2
⃗ r) =
E(⃗
(2.2.1)
(2.2.2)
(2.2.3)
(2.2.4)
Bemerkungen:
(i) Dichte der Feldlinien ist ein Maß für die Feldstärke
(ii) Feldlinien beginnen auf positiven Ladungen und enden auf negativen Ladungen (bzw. im Unendlichen)
(iii) Feld ist physikalisch, hat Energie und Impuls (siehe später)
Kontinuierliche Ladungsverteilung:
⃗ r) =
E(⃗
1
4πϵ0
*
dq(r⃗′ )
⃗r − r⃗′
|⃗r − r⃗′ |3
(i) linienförmige Ladungsverteilung dq = λdl′ entlang L:
*
λ(r⃗′ )
⃗ r) = 1
dl′
E(⃗
(⃗r − r⃗′ )
4πϵ0
|⃗r − r⃗′ |3
(2.2.5)
(2.2.6)
L
(ii) Flächenladungsdichte dq = σda :
′
1
4πϵ0
*
da′ σ(r⃗′ )
(2.2.7)
S
⃗r − ⃗r′
|⃗r − ⃗r′ |3
1
4πϵ0
*
⃗r − r⃗′
d3 r′ ϱ(r⃗′ )
|⃗r − r⃗′ |3
(2.2.8)
⃗ r) =
E(⃗
(iii) Volumenladungsdichte dq = ϱd3 r′ :
⃗ r) =
E(⃗
Beachte für Punktladungen:
ϱ(⃗r) =
&
j
8
V
qj δ (3) (⃗r − ⃗rj )
(2.2.9)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
2.3. Feldgleichungen
Die Feldgleichungen sind Differentialgleichungen, die elektrisches Feld bestimmen. Sie sind relevant, da
3
⃗′
⃗ = 1
manchmal nicht die gesamte Ladungsverteilung bekannt ist (d.h. man kann nicht E
dq(r⃗′ ) |⃗r⃗r−−r⃗r′ |3
4πϵ0
⃗ senkrecht zu leitenden
benutzen), sondern stattdessen auch Randbedingungen gegeben sind (Bsp: E
⃗ ·E
⃗ und ∇
⃗ × E,
⃗ da E(⃗
⃗ r) durch Divergenz
Oberflächen, siehe später). Die Feldgleichungen bestimmen ∇
und Rotation eindeutig festgelegt ist, siehe Helmholtz-Theorem.
⃗ r) =
E(⃗
Zunächst:
1
4πϵ0
*
⃗r − r⃗′
d3 r′ ϱ(r⃗′ )
|⃗r − r⃗′ |3
V
(2.3.1)
⃗r − r⃗′
1
⃗
= −∇
|⃗r − r⃗′ |3
|⃗r − r⃗′ |
⃗ 1 = − 12 e⃗r ].
[für r⃗′ = 0: ∇
r
r
D.h.
⃗ r)
E(⃗
=
1
4πϵ0
⃗
= −∇
*
6V
4
⃗
d3 r′ ϱ(r⃗′ ) − ∇
1
4πϵ0
⃗ r)
= −∇Φ(⃗
Φ(⃗r) =
1
4πϵ0
*
*
V
1
|⃗r − r⃗′ |
1 7
d3 r′ ϱ(r⃗′ )
|⃗r − r⃗′ |
d3 r ′
V
(2.3.2)
5
ϱ(r⃗′ )
+ konst.
|⃗r − r⃗′ |
(2.3.3)
(2.3.4)
skalares oder elektrostatisches Potential.
Bemerkungen:
⃗ r), kann beliebig gewählt werden.
(i) Konstante irrelevant für E(⃗
(ii) Potential für N Punktladungen ϱ(⃗r) =
N
&
i=1
qi δ (3) (⃗r − r⃗i )
⇒ Φ(⃗r) =
N
1 & qi
4πϵ0 i=1 |⃗r − r⃗i |
(2.3.5)
Beispiel:
q1 = q = −q2 , q > 0
⎛ ⎞
⎛ ⎞
−1
1
r⃗1 = ⎝ 0 ⎠ , r⃗2 = ⎝0⎠
0
0
⎛ ⎞
x
5
q 4
1
1
8
−8
⇒ Φ(⎝y ⎠) =
4πϵ0
(x + 1)2 + y 2 + z 2
(x − 1)2 + y 2 + z 2
z
(2.3.6)
(2.3.7)
(2.3.8)
9
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
(iii)
Φ(⃗r) − Φ(r⃗0 ) = −
*⃗r
⃗ r⃗′ )
d⃗l′ · E(
(2.3.9)
r⃗0
unabhängig vom Weg (vgl. Übung 4, Blatt 2).
(iv) Kraft auf Probeladung Q:
⃗ = −∇(QΦ)
⃗
F⃗ = QE
(2.3.10)
⇒ Kraft konservativ mit Potential QΦ
⃗ an Stelle ⃗r.
⇒ Φ(⃗r) ist potentielle Energie pro Ladung im Feld E
Zurück zu den Feldgleichungen:
⃗ ·E
⃗ =?
∇
⃗ · E(⃗
⃗ r) = −∆Φ(⃗r)
∇
(siehe Aufgabe 2, Blatt 1)
Insgesamt:
1
= − 4πϵ
0
*
(2.3.11)
*
d3 r′ ϱ(r⃗′ )∆
V
1
|⃗r − r⃗′ |
d3 r′ ϱ(r⃗′ )δ (3) (⃗r − r⃗′ )
=
1
ϵ0
=
V
1
r).
ϵ0 ϱ(⃗
(2.3.12)
⃗ ×E
⃗ =?
∇
(2.3.13)
⃗ ×E
⃗ = −∇
⃗ × (∇Φ)
⃗
∇
=0
(2.3.14)
⃗ · E(⃗
⃗ r) =
∇
1
r)
ϵ0 ϱ(⃗
⃗ × E(⃗
⃗ r) =
∇
0
(2.3.15)
wobei es sich bei der oberen um die inhomogene und bei der unteren um die homogene Feldgleichung der
Elektrostatik handelt.
10
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
Alternativ:
∆Φ(⃗r) =
− ϵ10 ϱ(⃗r)
⃗ r) =
E(⃗
⃗ r)
−∇Φ(⃗
(2.3.16)
wobei es sich bei der oberen Gleichung um eine Poisson-Gleichung handelt (für ϱ = 0: Laplace-Gleichung).
Integrale Form:
1) Würfel: Volumen V mit Rand ∂V , QV : Gesamtladung in V
Fluss des elektrischen Feldes aus V :
*
⃗
d⃗a · E
*
⃗ ·E
⃗
d3 r ∇
=
1
ϵ0
*
=
V
QV
ϵ0
=
V
∂V
d3 rϱ
(2.3.17)
Gauß’sches Gesetz
2) Oval: Fläche S mit Rand ∂S
d⃗a zeigt aus der Seitenebene des Skriptes heraus
!
*
⃗ × E)
⃗
⃗ = d⃗a · (∇
d⃗l · E
∂S
S
(2.3.18)
=0
⇒ keine geschlossenen Feldlinien des elektrischen Feldes in der Elektrostatik.
11
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
2.4. Beispiel: Die homogen geladene Kugel
Ladungsdichte:
ϱ(⃗r) = ϱ(r) =
.
ϱ0 = const
0
(r ≤ R)
(r > R)
(2.4.1)
⃗ r). Drei Möglichkeiten:
Zu bestimmen: E(⃗
*
⃗ = QV
(i) Gauß’sches Gesetz:
d⃗a · E
ϵ0
∂V
(ii) Poissongleichung: ∆Φ = − ϵϱ0
*
1
1
(iii) Φ(⃗r) = 4πϵ0
d3 r′ ϱ(r⃗′ )
|⃗r − r⃗′ |
Zu (i): Wegen Kugelsymmetrie am einfachsten in Kugelkoordinaten.
Kugelsymmetrie ⇒ Φ(⃗r) = Φ(r)
⃗ r)
⇒ E(⃗
⃗
= −∇Φ
= −∂r Φe⃗r
≡ E(r)e⃗r
(2.4.2)
d⃗a = r2 sin θ dθ dϕ e⃗r
(2.4.3)
Gauß’sches Gesetz mit V Kugel vom Radius r.
linke Seite (im Gauß’schen Gesetz ):
*
⃗
d⃗a · E
=
*2π
dϕ
0
0
∂V
2
!π
0
rechte Seite:
1
ϵ0
*
V
*π
dθ sin θr2 E(r) e⃗r · e⃗r
9 :; <
= r E(r)4π
9:;<
(2.4.4)
sin θdθ= − cos θ|π
0 =2
3 ′
d r
9:;<
′
ϱ(r )
=
1
ϵ0
r ′2 sin θdr ′ dθdϕ
*r
dr′ 4π(r′ )2 ϱ(r′ )
0
=
12
=1
2
(2.4.5)
1
4π 3
ϵ 0 ϱ0 3 r ,
r<R
1
4π 3
ϵ 0 ϱ0 3 R ,
r≥R
Vorlesungsskript T3p Elektrodynamik
Gesamtladung der Kugel: Q =
KAPITEL 2. ELEKTROSTATIK
4π
3
3 ϱ0 R
2
⇒ 4πr E(r) =
⇒ E(r) =
Potential Φ aus Φ′ (r) = −E(r).
⇒ Φ(r) =
Bestimmen von C1 und C2 :
⎧
⎨
⎩
1
r3
ϵ0 Q R 3 ,
r<R
1
ϵ0 Q,
r≥R
⎧
⎨
1
4πϵ0 ⎩
Q
R3 r,
r<R
Q
r2 ,
r≥R
⎧
Q 2
1
⎨ − 4πϵ
3 r + C1 ,
0 2R
1 Q
4πϵ0 r
⎩
+ C2 ,
(2.4.6)
(2.4.7)
r<R
(2.4.8)
r≥R
1) Üblicherweise setzt man Φ(r) →r→∞ 0 ⇒ C2 = 0
2) Wenn Φ bei r = R einen Sprung hätte, wäre E = −φ′ bei r = R nicht stetig (hätte einen Deltafunk1 Q
tionsbeitrag). Aber E ist stetig bei r = R: E = 4πϵ
2
0 R
!
⇒ lim+ Φ = lim− Φ
(2.4.9)
1 Q
4πϵ0 R
(2.4.10)
r→R
r→R
rechtsseitiger Limes:
lim Φ(r) =
r→R+
linksseitiger Limes:
lim Φ(r) = −
r→R−
⇒ C1
⇒ Φ(r)
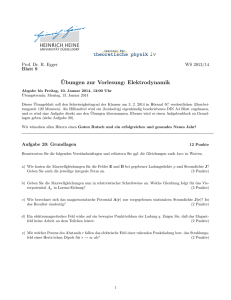
Graphisch:
=
1 3Q
4πϵ0 2R
=
⎧
⎨
⎩
1 Q
+ C1
4πϵ0 2R
Q 2
1
4πϵ0 (− 2R3 r
+
3Q
2R ),
1 Q
4πϵ0 r ,
(2.4.11)
r≤R
(2.4.12)
r≥R
⃗ und Φ wie bei Punktladung Q bei ⃗r = 0.
Für r > R sind E
13
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
Zu (ii), d.h. Poissongleichung:
∆Φ(r) = −
In Kugelkoordinaten:
∆Φ(r) =
1
ϱ(r)
ϵ0
(2.4.13)
1 d 2 d
1
(r
Φ) = − ϱ(r)
2
r dr
dr
ϵ0
(2.4.14)
gewöhnliche Differentialgleichung.
r>R:
(r2 Φ′ )′
= 0 ⇒ Φ = − Cr1 + C2
r<R:
(r2 Φ′ )′
= − ϵ10 ϱ0 r2
⇒ r 2 Φ′
= − ϵ10 13 ϱ0 r3 + C3
⇒ Φ′
= − ϵ10 13 ϱ0 r +
⇒ Φ
= − ϵ10 16 ϱ0 r2 −
(2.4.15)
C3
r2
C3
r
+ C4
Bestimmen der Integrationskonstanten:
1) willkürliche Wahl Φ(r) →r→∞ = 0 ⇒ C2 = 0
2) Term − Cr3 entspricht wegen
∆
=
C3
r
>
= −4πC3 δ (3) (⃗r)
(2.4.16)
einer Punktladung bei ⃗r = 0. Da keine Punktladung vorhanden ist, fordern wir C3 = 0.
3) Stetigkeit von Φ und Φ′ legen C1 und C4 fest:
∆Φ(r) = −
1
ϱ(r)
ϵ0
(2.4.17)
hat Sprung bei r = R ⇒ (r2 Φ′ )′ hat Sprung bei r = R ⇒ r2 Φ′ hat Knick bei r = R.
Analogon:
⇒ Φ′ und Φ sind stetig bei r = R.
Mit
4π 3
R ϱ0 = Q,
3
ergibt sich
lim Φ(r) = −
r→R+
14
ϱ0 =
3Q
4πR3
C1 !
1 Q
= lim− Φ(r) = C4 −
R
4πϵ0 2R
r→R
(2.4.18)
(2.4.19)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
und
C1 !
1 Q
= lim− Φ′ (r) = −
R2
4πϵ0 R2
r→R
lim Φ′ (r) =
r→R+
⇒ C1 = −
Insgesamt:
wie oben unter (i).
1
Q
4πϵ0
sowie
C4 =
⎧
Q 2
1 ⎨ − 2R3 r +
Φ(r) =
4πϵ0 ⎩ Q ,
r
3Q
2R ,
1 3Q
4πϵ0 2R
r≤R
(2.4.20)
(2.4.21)
(2.4.22)
r≥R
2.5. Elektrostatische Energie
⃗ von r⃗1 nach r⃗2 zu bewegen?
Arbeit um Ladung Q im elektrischen Feld E
⃗ auf Q: F⃗ = Q · E.
⃗
Kraft von E
Aufzubringende Kraft gegen F⃗ : −F⃗
⇒W
=−
*r⃗2
d⃗l · F⃗ = −Q
r⃗1
*r⃗2
r⃗1
= Q [Φ(r⃗2 ) − Φ(r⃗1 )]
⃗
d⃗l · 9:;<
E
⃗
−∇Φ
(2.5.1)
⇒ Arbeit, um Q von weit weg (r⃗1 → ∞) nach ⃗r zu bringen (Φ(r → ∞) = 0):
W = QΦ(⃗r)
(2.5.2)
Elektrostatische Energie einer Punktladungsverteilung: Arbeit, um Ladungen {qi |i = 1, . . . , N } sukzessive
vom Unendlichen nach r⃗i zu bringen.
Arbeit, um q1 nach r⃗1 zu bringen:
W1 = 0
(2.5.3)
Arbeit, um q2 nach r⃗2 zu bringen:
W2 = q2 ·
1
1
q1
4πϵ0 |r⃗1 − r⃗2 |
(2.5.4)
Arbeit, um qi im Feld der qj , j = 1, . . . , i − 1 nach r⃗i zu bringen:
Wi = qi
i−1
1 &
qj
4πϵ0 j=1 |⃗
ri − r⃗j |
(2.5.5)
15
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
Gesamtarbeit:
N
&
=
W
i=1
N
&
=
Wi
qi
i=1
i−1
1 &
qj
4πϵ0 j=1 |⃗
ri − r⃗j |
9:;<
j < i ⇒ jedes
Ladungspaar wird
nur einmal gezählt
1
2
=
9:;<
N
&
1
4πϵ0
qi
i=1
jedes Paar
wird zweimal gezählt,
1
daher Faktor 2 notwendig
1
2
=
N
&
N
&
j = 1,
j ̸= i
(2.5.6)
qj
|⃗
ri − r⃗j |
q i Φi
i=1
mit
Φi =
N
&
1
4πϵ0
qj
|⃗
ri − r⃗j |
j = 1,
j ̸= i
(2.5.7)
Lokalisierte, kontinuierliche Ladungsverteilung:
*
1
W = 2 d3 rΦ(⃗r)ϱ(⃗r)
V
= − 12
*
V
= − ϵ20
9:;<
d3 rϵ0 Φ(⃗r)∆Φ(⃗r)
*
⃗ · (Φ(⃗r)∇Φ(⃗
⃗ r)) +
d3 r ∇
⃗ · (f A)
⃗ = V
∇
⃗ )·A
⃗ + f (∇
⃗ · A)
⃗
(∇f
= − ϵ20
9:;<
Gauß
ϵ0
2
*
⃗ r) · ∇Φ(⃗
⃗ r)
d3 r∇Φ(⃗
(2.5.8)
V
!
ϵ0
⃗
d⃗a · (Φ∇Φ)
+
2
*
⃗ 2
d3 r|E|
V
∂V
Jetzt wähle V = Kugel vom Radius R.
!
⃗
d⃗a · (Φ∇Φ)
→ 0
(2.5.9)
R→∞
∂V
⎡
1
4πϵ0
=
⎢ Φ(⃗r)
⎢
⎢
⎣
⃗ r)
⇒ Φ(⃗r)∇Φ(⃗
∼
*
ϱ(r⃗′ )
d r
|⃗r − r⃗′ |
3 ′
1
R3 ,
⇒ W =
∼
9:;<
|⃗
r |=R→∞
außerdem d⃗a ∼ R2
ϵ0
2
*
⎤
1
1
=
⎥
|⃗r|
R ⎥
⎥
⎦
⃗ 2
d3 r|E|
(2.5.10)
(2.5.11)
R3
Bemerkung: Gleichung 2.5.11 gilt nicht für Punktladungen, denn Ausgangspunkt
1
W =
2
16
*
1
d rΦ(⃗r)ϱ(⃗r) =
8πϵ0
3
*
3
d r
*
d3 r ′
ϱ(r⃗′ )
ϱ(⃗r)
|⃗r − r⃗′ |
(2.5.12)
Vorlesungsskript T3p Elektrodynamik
ergibt für ϱ(⃗r) =
N
&
i=1
KAPITEL 2. ELEKTROSTATIK
qi δ (3) (⃗r − r⃗′ )
W =
inklusive divergenter Selbstenergie i = j.
N
1 & q i qj
8πϵ0 i,j=1 |⃗
ri − r⃗j |
(2.5.13)
2.6. Randwertprobleme
Problemstellung:
⃗ r)).
Gesucht: Φ(⃗r) (und E(⃗
Schwierigkeit: Ladung in V induziert (zunächst unbekannte) Oberflächenladung auf Metall.
*
ϱ(r⃗′ )
1
d3 r ′
Φ(⃗r) =
4πϵ0
|⃗r − r⃗′ |
(2.6.1)
kann nicht benutzt werden.
⃗ auf Metalloberfläche.
Lösung: Löse ∆Φ = − ϵϱ0 in V und nutze Randbedingungen für Φ bzw. E
Zunächst:
⃗ = 0 im Inneren des Leiters (in Elektrostatik). Andernfalls: Beschleunigung der Leitungselektronen
(i) E
⃗ · E)
⃗
(ii) ϱ = 0 im Inneren des Leiters (ϱ = ϵ0 · ∇
⇒ alle Nettoladung des Leiters auf seiner Oberfläche
⃗ in V :
Jetzt Randbedingungen an E
(a) Zur Tangentialkomponente des elektrischen Feldes:
17
b,
fTI i\
ti\'"
Cr+
Ladung im
Inneren von V
tr Fr-r
s-'__r_[
1
σ(⃗r)
ϵ0
für ⃗r ∈ R
idll
;rt\D I
i
i-L---
i.'
€:
=)
" .J --\!-*-
⃗n · E⃗2 (⃗r) =
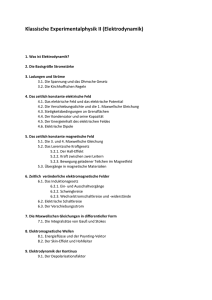
1) Tangentialkomponente des elektrischen Feldes verschwindet an metallischen Rändern
2) Normalkomponente ist am Rand gleich
1
ϵ0
mal Oberflächenladungsdichte
Im Allgemeinen hat ein Leiter mehrere Randkomponenten Ri .
18
(2.6.4)
W*rS
*3
Pt
gsFtn
q
i-+1
r'
Beitrag von Mantelfläche vernachlässigbar im Limes d → 0;
f so klein, dass
⃗2 approx.
E
konstant ist
Im Limes d → 0 tragen nur Oberflächenladungen zu q bei.
Oberflächenladungsdichte σ(⃗r) = fq (f klein)
Zusammenfassend:
.
v
-*--Er
I
c4fu
-61 -L
-i-:-1f
__r:l:
_ _ L+_ih,
I tE,\
-;''.
---
Jr
)1,
*x
95,
|
⃗n: Einheitsoberflächennormale aus dem Metall heraus, f : Flächeninhalt des Deckels bzw. Bodens
!
1
⃗·E
⃗
lim
dA
≈
f⃗n · (E⃗2 − E⃗1 ) = f⃗n · E⃗2 =
q
(2.6.3)
9:;<
d→0
ϵ0 9:;<
⇒
{t J {r
-nrr, fll
'3
'r'1
iL
t
,)t I
,i
il
-.€A
=?
't'f
I
II
_l_i_L_L
,
I
I
_
l(
LrL_l_llr_
{-
R,
-
_
(b) Zur Normalkomponente des elektrischen Feldes:
ft,T'
+, tSi v-, 1
Φ(⃗r) = const für ⃗r ∈ R
ti
⇒
⇒
w
L
I
4
\_r
fit"
c
{
clx /\aL
f e
t'.
ti-\
(2.6.2)
D.h. das elektrostatische Potential ist konstant entlang jeder Randkomponente R des Metalls.
∂V
ftu
h
ll
' \--
nl
L⃗t · E⃗2 (r) = 0
⃗t · E⃗2 (⃗r) = 0 für ⃗r ∈ R
ti-*
,-fiF= ;i
/e-
- :t-1€-tsl
_ t_d..__t_
-t
d
Fi"
:,lIAt
,6lhr {' g F
Terme proportional zu d verlässigbar für d → 0;
⃗2
L so klein, dass E
näherungsweise
konstant
lnU
∂S
-
=
⃗
d⃗l · E
f
L,r
L⃗t(E⃗2 − E⃗1 )
!
;<9:
=
^
il
r-
=0
rt"L
⃗ ×E
⃗)
d⃗a · (∇
9 :; <
S
=
9:;<
,\
\,
^-
Stokes
*
=
-rs{5
0
Vorlesungsskript T3p Elektrodynamik
I
⃗t: tangentialer Einheitsvektor
"lrn,
"tt
..
b,-\ Fi
(A -r
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
⇒ Randwertproblem:
∆Φ(⃗r)
Φ(⃗r)
= − ϵ10 ϱ(⃗r)
.
Φi
=
0
in V
auf Ri (wobei Φi = konst)
für r → ∞, falls V unbegrenzt
(2.6.5)
Man kann zeigen:
Lösung
(i) existiert
(ii) ist eindeutig (siehe Übung)
Lösung für Φ
⇒
⃗ = −∇Φ
⃗
E
⇒
⃗
Oberflächenladungsdichte σ(⃗r) = ϵ0⃗n · E,
Weiterer Eindeutigkeitssatz (siehe 3.1.6 im Griffiths):
(2.6.6)
⃗r ∈ R
⃗ ist in V eindeutig bestimmt, wenn Gesamtladungen Qi auf jedem Leiter gegeben sind.
E
⇒ (Influenz)-Ladungsverteilung auf jedem Leiter eindeutig durch Qi bestimmt.
19
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
Anwendung (Bsp. 2.9 aus Griffiths):
Feld außerhalb der Metallkugel:
⃗ r) =
E(⃗
⃗r
1
q
4πϵ0 r3
(2.6.7)
(wie Punktladung bei ⃗r = 0, unabhängig von Form des Hohlraumes und von Position von q!)
Influenzladungen −q auf Hohlraumoberfläche egalisiert Feld von Punktladung q außerhalb des Hohlraumes, Ladung +q auf Kugeloberfläche gleichmäßig verteilt.
2.6.1. Methode der Bildladung
Problemstellung: Punktladung vor geerdeter Metallplatte
Gesucht: Φ(⃗r) und σ (induzierte Oberflächenladungsdichte)
20
Vorlesungsskript T3p Elektrodynamik
Zunächst:
KAPITEL 2. ELEKTROSTATIK
für x ≥ 0
Φ(x = 0) = 0,
Φ(⃗r) ≡ 0
löst ∆Φ = 0,
Φ(r → ∞) → 0
Φ(x < 0) = ?
(2.6.8)
(2.6.9)
Suche Lösung von
⎧
∆Φ
⎪
⎪
⎨
Φ(x = 0, y, z)
⎪
⎪
⎩
Φ→0
= − ϵ10 q δ (3) (⃗r + ae⃗x )
im Gebiet x < 0
(2.6.10)
=0
für x2 + y 2 + z 2 >> a2
Trick: Betrachte zunächst vollkommen anderes Problem: Zwei Ladungen und keine Metallplatte.
bei ⃗r = −ae⃗x
q
bei ⃗r = ae⃗x
−q
Potential
Φ(⃗r) =
q
4πϵ0
erfüllt
∆Φ = −
=
(2.6.11)
(Bildladung)
1
1
−
|⃗r + ae⃗x | |⃗r − ae⃗x |
>
(2.6.12)
⎤
⎡
1
q ⎣δ (3) (⃗r + ae⃗x ) −δ (3) (⃗r − ae⃗x )⎦
9
:;
<
ϵ0
(2.6.13)
=0 im Gebiet x<0
Offenbar erfüllt Φ das Randwertproblem (2.6.10). Nach dem ersten Eindeutigkeitssatz (Φ eindeutig durch
Randwerte bestimmt) ist Φ daher für x < 0 die gesuchte Lösung des ursprünglichen Problems.
Methode der Bildladung: Bestimme Bildladungen außerhalb von V so, dass sie zusammen mit Ladungen
in V ein Potential ergeben, das die Randbedingungen erfüllt.
2.6.2. Influenzladung
x>0:
⃗ r)
E(⃗
= 0
x<0:
⃗ r)
E(⃗
⃗
= −∇Φ
=
q
4πϵ0
Oberflächenladung:
1
ϵ0 σ(x
= 0)
⇒ σ(y, z)
4
⃗
r +ae⃗x
|⃗
r +ae⃗x |3
−
⃗
r −ae⃗x
|⃗
r −ae⃗x |3
5
(2.6.14)
⃗ = 0) = −Ex (x = 0)
= −e⃗x E(x
= −ϵ0 Ex (x = 0, y, z)
=
−qa
(2.6.15)
3
2π(a2 +y 2 +z 2 ) 2
9 :; <
≡s2
21
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
Gesamtladung:
=
qinfl
*2π
dϕ
ds s σ(s) = 2π
0
0
= −aq
*∞
*∞
ds s σ(s)
0
*∞
ds
9
−√
0
s
3
2
(a2 + s2 )
:; "
<
1
(2.6.16)
= −q
"∞
"
a2 +s2 "0
Kraft auf Punktladung (ausgeübt von Influenzladungen):
F⃗
⇒ F⃗
⃗ ′ (⃗r = −ae⃗x ),
= qE
=
⃗ ′ : Feld der Influenzladungen, was gleich dem Feld der Bildladung ist
E
2
q
1
4πϵ0 (2a)2 e⃗x
(2.6.17)
2.6.3. Kondensator
Zwei Leiter mit Ladungen Q und −Q, d.h.
*(2)
⃗ heißt Spannung.
Potentialdifferenz U = Φ1 − Φ2 = d⃗l · E
(1)
Beobachtung: Sei Φ0 (⃗r) eindeutige Lösung von
∆Φ(⃗r) = 0,
Φ|R1 = Φ1 ,
Φ|R2 = Φ2 ,
Φ(r → ∞) → 0
(2.6.18)
Dann ist αΦ0 (⃗r) (eindeutige) Lösung von
∆Φ(⃗r) = 0,
Φ|R2 = αΦ2 ,
Φ(r → ∞) → 0
(2.6.19)
*
⃗
σ = ϵ0⃗nE,
Q = daσ und U = Φ1 − Φ2 bekommen Faktor
Φ|R1 = αΦ1 ,
⃗ = −∇Φ,
⃗
mit α ∈ R beliebig. D.h. auch E
R1
α.
Q
U:
⇒Q∼U
Kapazität
Proportionalitätsfaktor C ≡
C ist geometrische Größe, hängt von Größe, Form und Abstand der Leiter ab.
Einheit:
C (Coulomb)
F (Farad) =
V (Volt)
Beispiel:
22
(2.6.20)
(2.6.21)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
(i) Plattenkondensator
Annahme: d <<
√
A ⇒ Randeffekt vernachlässigbar
⇒ σ|R1 =
Q
= −σ|R2
A
siehe Aufgabe 2 b), Blatt 3: Elektrisches Feld einer Platte (bei x = 0):
2 1
(rechts von der Platte)
2ϵ0 σ e⃗x
⃗
E(⃗r) =
− 2ϵ10 σ e⃗x
(links von der Platte)
(2.6.22)
(2.6.23)
D.h. (für Q > 0):
Das Feld außerhalb der Platten verschwindet und zwischen den Platten ist es
⃗ = 1 Q e⃗x
E
ϵ0 A
⇒
*(2)
⃗ = Q d
U = d⃗l · E
Aϵ0
(2.6.24)
(1)
somit
C=
Q
Aϵ0
=
U
d
(2.6.25)
(ii) Kugelkondensator Ladung +Q auf innerer Kugel, Ladung −Q auf äußerer Kugel
23
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
⃗
E
⇒
9:;<
1 Q
4πϵ0 r 2 e⃗r
=
zwischen den Kugeln
Gauß’sches
Gesetz
äußere
Kugel
⇒
=
U
*
⃗
d⃗l · E
*b
=
a
innere
Kugel
=
1
4πϵ0 Q
*b
dr
r2
=
a
⇒
=
C
Q
U
dre⃗r ·
=
Q
4πϵ0
=
1 Q
e⃗r
4πϵ0 r2
1 1
−
a b
>
(2.6.26)
>
ab
4πϵ0 b−a
=
Potentielle Energie eines geladenen Kondensators:
*
W = 21 d3 rΦ(r)ϱ(r)
V
1
2
=
9:;<
*
Φ(⃗r) σ(⃗r)
9:;<
da
Ladungen metallische
konstant entlang
nur auf
Ränder
metallischer Ränder
Oberflächen
⎡
(2.6.27)
⎤
⎢
⎥
*
*
⎢
⎥
⎢
⎥
daσ(⃗r) +Φ2
daσ(⃗r)⎥
= 21 ⎢Φ1
⎢
⎥
⎣ 1. Rand
⎦
2. Rand
9
9
:;
<
:;
<
=Q
=−Q
= 21 Q(Φ1 − Φ2 ) = 12 QU = 12 CU 2 =
2
1Q
2 C
2.6.4. Separation der Variablen
Bisher: ∆Φ = ϱ, Φ konstant auf jeder Randkomponente.
Jetzt: ∆Φ = 0 in V , Φ = Φ0 (⃗r) auf ∂V (Φ0 variiert entlang des Randes, der daher kein Leiter sein kann).
Prinzipielle Idee:
(i) Löse ∆Φ = 0 durch Produktansatz, Φ(⃗r) = f (x)g(y)h(z) oder Φ(⃗r) = R(r)Θ(ϑ)φ(ϕ) ⇒ Menge von
Produktlösungen Φn . Nicht allgemeinste Lösung.
Aber: ∆Φ = 0 ist linear, d.h. Φ1 , Φ2 , Φ3 , . . . sind Lösungen ⇒ Φ ≡ α1 Φ1 + α2 Φ2 + . . . ist Lösung
(mit αi ∈ R), denn ∆Φ = α1 ∆Φ1 +α2 ∆Φ2 + . . . = 0.
9 :; <
9 :; <
=0
=0
(ii) Benutze, dass allgemeinste
Lösung als Linearkombination der Produktlösungen geschrieben werden
&
kann, d.h. Φ =
αn Φn und bestimme αn aus Randbedingung Φ = Φ0 (⃗r) auf ∂V .
n
Kartesische Koordinaten: siehe Übung
Hier: Kugelkoordinaten.
∆Φ
=
1 ∂
r 2 ∂r
@
A
r2 ∂Φ
∂r +
≡ ∆r Φ +
9:;<
radialer
Anteil
24
1
r2
1
r2
6
∆ϑ,ϕ Φ
9 :; <
Winkelanteil
1
∂
sin ϑ ∂ϑ
@
A
sin ϑ ∂Φ
∂ϑ +
1 ∂2Φ
sin2 ϑ ∂ϕ2
7
(2.6.28)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
vergleiche Quantenmechanik: L̂2 = −!2 ∆ϑ,ϕ
Produktansatz: Φ(r, ϑ, ϕ) = R(r)Y (ϑ, ϕ)
R
∆Φ = Y ∆r R + 2 ∆ϑ,ϕ Y = 0
r
r2 ∆r R ∆ϑ,ϕ Y
+
=0
R < 9 :;
Y <
9 :;
⇒
9:;<
überall
wo Φ ̸= 0
B
B r2
B·
B RY
hängt nur hängt nur
von r ab von ϑ, ϕ ab
r 2 ∆r R
R
⇒
= konst
9 :; < = −
(2.6.29)
(2.6.30)
∆ϑ,ϕ Y
Y
≡ℓ(ℓ+1)
D.h.
r2 ∆r R = ℓ(ℓ + 1)R
(2.6.31)
∆ϑ,ϕ Y (ϑ, ϕ) = −ℓ(ℓ + 1)Y (ϑ, ϕ)
9 :; <
(2.6.32)
und
≡∆ϑ + sin12 ϑ ∆ϕ
Lösung von (2.6.31):
R(r) = Arℓ +
B
rℓ+1
(2.6.33)
Lösung von (2.6.32) durch Produktansatz:
(2.6.34)
Y (ϑ, ϕ) = Θ(ϑ)φ(ϕ)
⇒
⇒
9:;<
überall,
wo Y ̸= 0
⇒
D.h.
B
B sin2 ϑ
B·
B Θφ
Θ
∆ϕ φ = −ℓ(ℓ + 1)Θφ
φ∆ϑ Θ +
sin2 ϑ
sin2 ϑ
1
∆ϑ Θ + ℓ(ℓ + 1) sin2 ϑ = − ∆ϕ φ
Θ
φ
9
:;
< 9 :; <
hängt nur von ϑ ab
(2.6.35)
(2.6.36)
hängt nur
von ϕ ab
1
sin2 ϑ
− ∆ϕ φ = konst
∆ϑ Θ + ℓ(ℓ + 1) sin2 ϑ
=
9 :; <
φ
Θ
2
(2.6.37)
≡m
∆ϑ Θ =
∆ϕ φ = −m2 φ
(2.6.38)
C
(2.6.39)
D
m2
−
ℓ(ℓ
+
1)
Θ
sin2 ϑ
Insgesamt: 3 gewöhnliche Differentialgleichungen!
(2.6.39) hat nichttriviale und nichtsinguläre Lösungen für ϑ ∈ [0, π] nur für ℓ ∈ N0 und m = −ℓ, −ℓ +
1, . . . , ℓ − 1, ℓ, und zwar
Θ = C Pℓm (cos ϑ)
(2.6.40)
mit
Pℓm (x) =
m
(−1)m
(1 − x2 ) 2
ℓ
2 ℓ!
=
d
dx
>ℓ+m
(x2 − 1)ℓ
(2.6.41)
“zugeordnete Legendrefunktionen”
25
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
Beispiel:
1
x√
−√ 1 − x2
1
2
2 1−x
(2.6.42)
φ = D eimϕ + E e−imϕ
(2.6.43)
P00
P10
P11
P1,−1
=
=
=
=
Bemerkung: (2.6.39) ist Differentialgleichung 2. Ordnung ⇒ 2 unabhängige Lösungen für jedes ℓ!? Andere
Lösungen singulär bei ϑ = 0 oder π, z.B. Θ(ϑ) = ln(tan ϑ2 ) löst (2.6.39) für ℓ = 0 (check!)
∂2
2
Jetzt: Lösung von (2.6.38), d.h. ∆ϕ φ = ∂ϕ
2 φ = −m φ:
Zusammen: Satz von Produktlösungen für
(2.6.44)
∆ϑ,ϕ Y = −ℓ(ℓ + 1)Y
ist gegeben durch:
2
Yℓm (ϑ, ϕ) =
E
2ℓ + 1 (ℓ − m)!
Pℓm (cos ϑ) eimϕ
4π (ℓ + m)!
|
ℓ ∈ N0 , m = −ℓ, . . . , ℓ
F
(2.6.45)
“Kugelflächenfunktionen”
G
Beachte: Pℓm e−imϕ ∼ Pℓ,−m e
H
−imϕ
Bemerkung: Yℓ,m=0 (ϑ) haben keine ϕ-Abhängigkeit (d.h. Zylindersymmetrie). Pℓ,m=0 ≡ Pℓ heißen LegendrePolynome.
P0 (x)
=
1
P1 (x)
=
x
P2 (x)
=
P3 (x)
=
1
2
2 (3x
1
3
2 (5x
− 1)
(2.6.46)
− 3x)
Eigenschaften der Legendrefunktionen und Kugelflächenfunktionen:
(i) Orthogonalität:
*+1
dx Pℓm (x)Pℓ′ m (x) =
−1
*2π
(ℓ + m)!
2
δℓℓ′
2ℓ + 1 (ℓ − m)!
′
(2.6.47)
dϕ ei(m−m )ϕ = 2πδmm′
(2.6.48)
*+1 ; =x
<9 :
dϕ d(cos ϑ)(Yℓ′ m′ )∗ Yℓm = δℓℓ′ δmm′
(2.6.49)
0
*2π
0
−1
9!
π
0
:;
<
dθ sin ϑ
(ii) Vollständigkeit: Jede quadratintegrable Funktion f von ϑ ∈ [0, π] und ϕ ∈ [0, 2π[ lässt sich als
Linearkombination darstellen:
f (ϑ, ϕ) =
∞ &
ℓ
&
fℓm Yℓm (ϑ, ϕ)
(2.6.50)
ℓ=0 m=−ℓ
mit
fℓm =
*2π
0
26
*+1
dϕ d(cos ϑ) f (ϑ, ϕ) (Yℓm (ϑ, ϕ))∗
−1
(2.6.51)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
Insgesamt: Satz von Produktlösungen von ∆Φ = 0:
.
I
1
ℓ
r Yℓm ,
| l ∈ N0 , m = −ℓ, −ℓ + 1, . . . , ℓ
rℓ+m Yℓm
(2.6.52)
Allgemeinste Lösung von ∆Φ = 0 ist Linearkombination
Φ(r, ϑ, ϕ) =
=
∞ &
ℓ
&
Bℓm
rℓ+1
Aℓm rℓ +
ℓ=0 m=−ℓ
>
Yℓm (ϑ, ϕ)
(2.6.53)
Dies sieht man wie folgt. Vollständigkeit der Yℓm
⇒ Φ(r, ϑ, ϕ) =
ℓ
∞ &
&
aℓm (r) Yℓm (ϑ, ϕ)
(2.6.54)
ℓ=0 m=−ℓ
für beliebige, quadratintegrable Funktion Φ.
⇒
∆Φ
9:;<
∞ &
ℓ
6
&
=
ℓ=0 m=−ℓ
∆r + r12 ∆ϑ,ϕ
⇒
9:;<
Orthogonalität
der Yℓm
7
aℓm
!
ℓ(ℓ
+
1)
Yℓm = 0
r2
∆r aℓm −
∀ℓ,m : r2 ∆r aℓm = ℓ(ℓ + 1) aℓm
Bℓm
rℓ+1
Wenn Φ zylindersymmetrisch ist, d.h. Φ = Φ(r, ϑ) (ϕ-unabhängig), dann
⇒ ∀ℓ,m : aℓm = Aℓm rℓ +
Φ(r, ϑ) =
∞ =
&
Bℓ
rℓ+1
Aℓ r ℓ +
ℓ=0
>
Pℓ (cos ϑ)
(2.6.55)
(2.6.56)
(2.6.57)
(2.6.58)
Schließlich Aℓm , Bℓm (bzw. Aℓ , Bℓ ) aus Randbedingungen, z.B.
Φ(r, ϑ) = Φ0 (ϑ),
r≤R
⇒
9:;<
∞
&
Φ(r, ϑ) =
r=R
Aℓ rℓ Pℓ (cos ϑ)
ℓ=0
Regularität
bei r = 0
⇒
Φ0 (ϑ) = Φ(R, ϑ) =
⇒
∀
∞
&
Aℓ Rℓ Pℓ (cos ϑ)
(2.6.60)
ℓ=0
ℓ′ ∈N
0
:A =
ℓ′
2ℓ′ +1
2Rℓ′
*π
r≥R
dϑ sin ϑ Φ0 (ϑ) Pℓ′ (cos ϑ)
0
sowie
analog.
(2.6.59)
⇒
9:;<
Regularität
bei r → ∞
Φ(r, ϑ) =
∞
&
Bℓ
Pℓ (cos ϑ)
rℓ+1
(2.6.61)
ℓ=0
27
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
2.7. Beispiel: Leitende Kugel im homogenen Feld
homogenes
äußeres
elektrisches
Feld
Randwertproblem:
in V
∆Φ = 0
(2.7.1)
(außerhalb der Kugel und zwischen den Platten)
(2.7.2)
Φ(R, ϑ) = Φ0
(keine ϕ-Abhängigkeit wegen azimutaler Symmetrie)
E⃗0 = E0 e⃗z ⇒ Φ(r, ϑ) 9:;<
→ −E0 z + const = −E0 r cos ϑ + Φ1
(2.7.3)
r >> R
aber zwischen
den Platten
Azimutale Symmetrie:
∞
&
⇒ Φ(r, ϑ) =
(Aℓ rℓ + Bℓ r−ℓ−1 )Pℓ (cos ϑ)
(2.7.4)
ℓ=0
Koeffizienten durch (2.7.2) und (2.7.3) festgelegt.
(2.7.2) ⇒
∞ =
&
Aℓ Rℓ +
ℓ=0
Bℓ
Rℓ+1
Orthogonalität der Legendre-Polynome:
>
!
Pℓ (cos ϑ) = Φ0 9:;<
= Φ0 P0 (cos ϑ)
⇒ B0 = R(Φ0 − A0 )
n = 0 : A0 + BR0 = Φ0
n
n ̸= 0 : An Rn + RBn+1
= 0 ⇒ Bn = −An R2n+1
(2.7.3) ⇒
⇒
∞ =
&
ℓ=0
n=0:
n=1:
n>1:
28
Aℓ rℓ +
Bℓ
rℓ+1
>
Pℓ (cos ϑ) 9:;<
→ −E0 rP1 (cos ϑ) + Φ1 P0 (cos ϑ)
(2.7.6)
(2.7.7)
r→∞
P1 (cos ϑ) = cos ϑ
B0
→ A0
r r→∞
A1 r + Br21 → A1 r
r→∞
n
An rn + rB
→ An rn
n+1
r→∞
A0 +
(2.7.5)
P0 ≡1
!
= Φ1
!
⇒ A0 = Φ1
= −E0 r
⇒ A1 = −E0
=0
⇒ A2 = A3 = . . . = 0
!
(2.7.8)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
Mit (2.7.6):
= R(Φ0 − Φ1 )
= E0 R 3
=0
B0
B1
B2 = B3 = . . .
(2.7.9)
Also:
Φ(r, ϑ)
=
Φ1
9:;<
+
unerhebliche
Konstante
R
(Φ0 − Φ1 )
9
:; r<
−E0 r cos ϑ
9 :; <
von außen
angelegtes
Feld
Potential der
Gesamtladung
der Kugel
+
R3
E0 2 cos ϑ
9 r :;
<
(r ≥ R)
(2.7.10)
Potential der
Influenzladung
Oberflächenladung σ auf Kugel:
σ = − ϵ0
Gesamtladung:
*2π
0
B
Φ0 − Φ1
∂Φ BB
= ϵ0
+ 3ϵ0 E0 cos ϑ
∂r Br=R
R
*+1
dϕ d(cos ϑ)R2 σ = 4πϵ0 R(Φ0 − Φ1 )
(2.7.11)
(2.7.12)
−1
(kein Beitrag der Influenzladungen, da deren Summe 0 ist)
Beitrag der Influenzladung zum Potential (r ≥ R):
Φσ = E 0
R3
p⃗ · ⃗r
cos ϑ = 3
2
r
r
(reines Dipolfeld)
(2.7.13)
mit Dipolmoment
p⃗ = E0 R3 e⃗z
(⃗r · e⃗z = r cos ϑ)
Bemerkung: Beitrag der Influenzladung zur Feldstärke
=
>
p⃗ · ⃗r
⃗
⃗
Eσ = − ∇
r3
⇒ E⃗σ = E⃗dip =
3⃗
r (⃗
p·⃗
r )−⃗
pr 2
,
r5
(r ≥ R)
9 :; <
(2.7.14)
(2.7.15)
sonst Beitrag
∼ δ (3) (⃗
r)
|E⃗dip | = O( r13 )
(2.7.16)
⃗ | = O( 12 ))
(im Gegensatz zu Monopol |Emon
r
29
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
2.8. Multipolentwicklung
Situation: statische lokalisierte Ladungsverteilung.
Gesucht: Approximation von Φ(⃗r) für große Abstände, d.h. Entwicklung von Φ(⃗r) in 1r .
Wissen:
*
ϱ(r⃗′ )
1
d3 r ′
Φ(⃗r) =
4πϵ0
|⃗r − r⃗′ |
(2.8.1)
Beispiele:
(i) Punktladung am Ursprung
Φ(⃗r) =
1 q
4πϵ0 r
(2.8.2)
exakt, keine Approximation nötig.
Allgemeine Ladungsverteilung sieht von weit weg wie Punktladung aus, d.h. (setze |⃗r − r⃗′ | ≈ r in
(2.8.1))
1 Q
Φ(⃗r) ≈
(r → ∞)
(2.8.3)
4πϵ0 r
Q: Gesamtladung
Was, wenn Q = 0?
(ii) 2 Punktladungen (Dipol)
Φ(⃗r) =
Kosinussatz:
|⃗r − r⃗± |2
1
q
q
(
−
)
4πϵ0 |⃗r − r⃗+ | |⃗r − r⃗− |
= r2 +
9:;<
@ d A2
2
Kosinussatz &
cos(π − ϑ) = − cos ϑ
2
= r (1 ∓
d
r
∓ rd cos ϑ
= >2
1 d
)
cos ϑ +
4 r
9 :; <
vernachlässigbar
für d
r << 1
30
(2.8.4)
(2.8.5)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
⇒
1
|⃗
r −r⃗± |
1
≈ 1r (1 ∓ dr cos ϑ)− 2
d
≈ 1r (1 ± 2r
cos ϑ)
9:;<
(1 + a)λ
≈ 1 + λa
für |a| << 1
D.h.
Φ(⃗r)
≈
Potential eines Dipols ≈
1
r2
=
1 qd cos ϑ
4πϵ0
r2
=
1
4πϵ0
*
1
= 4πϵ
9:;<
0
Aufg. 2
Blatt 6
⇒ Φ(⃗r)
=
4
5
1
1
−
|⃗r − r⃗+ | |⃗r − r⃗− |
:;
<
9
≈ rd2 cos ϑ
(2.8.7)
fällt schneller ab als im Fall Q ̸= 0.
Im Allgemeinen:
Φ(⃗r)
1
4πϵ0 q
(2.8.6)
ϱ(r⃗′ )
d3 r ′
|⃗r − r⃗′ |
*
∞ = >ℓ
1 & r′
Pℓ (cos ϑ′ )
d3 r′ ϱ(r⃗′ )
r
r
(2.8.8)
ℓ=0
*
∞
&
1
d3 r′ ϱ(r⃗′ )(r′ )ℓ Pℓ (cos ϑ′ )
rℓ+1
1
4πϵ0
ℓ=0
=
1
4πϵ0
6 *
p⃗ =
1
r
*
*
7
d3 r′ ϱ(r⃗′ ) + r12
d3 r′ ϱ(r⃗′ )r′ cos ϑ′ + . . .
:;
<
:;
<
9
9!
Q
d3 r′ ϱ(r⃗′ )r⃗′
(2.8.9)
d3 r ′ ϱ(r⃗′ )e⃗r · r⃗′
!
= e⃗r · d3 r ′ ϱ(r⃗′ )r⃗′
≡ e⃗r · p
⃗
Dipolmoment
(2.8.10)
31
KAPITEL 2. ELEKTROSTATIK
Vorlesungsskript T3p Elektrodynamik
= >
1 Q
1
1 1
⇒ Φ(⃗r) =
+
e⃗r · p⃗ + O
4πϵ0 r
4πϵ0 r2
r3
9 :; < 9
:;
< 9 :; <
Monopolbeitrag
Bemerkungen:
(i) N Punktladungen (qi bei r⃗i ) ⇒ p⃗ =
N
&
Dipolbeitrag
(2.8.11)
Quadrupolbeitrag etc.
qi r⃗i
i=1
(ii) Multipolmomente hängen i.A. von Wahl des Ursprungs und Orientierung des Koordinatensystems
ab.
Aber: Das niedrigste nicht verschwindende Multipolmoment ist unabhängig von Wahl des Ursprungs
Beispiele:
(a) Punktladung bei r⃗0 : Q unabhängig von Ursprung, aber p⃗ = q r⃗0 hängt von Wahl des Ursprungs
ab
(b) 2 Punktladungen q bei r⃗1 , −q bei r⃗2 . Q = q − q = 0, p⃗ = q(r⃗1 − r⃗2 ) invariant unter Verschiebung
des Ursprungs
(iii) Dipol in einem äußeren elektrischen Feld
⃗ = p⃗ × E
⃗ ext ), das p⃗ entlang von E
⃗ ext ausrichtet, um potentielle Energie Vpot =
⇒ Drehmoment (M
⃗ ext zu minimieren.
−⃗
p·E
(iv) Elektrisches Feld eines (Punkt-)Dipols
⃗ dip (⃗r) =
E
32
1 1
[3(⃗
p · e⃗r )e⃗r − p⃗]
4πϵ0 r3
(2.8.12)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 2. ELEKTROSTATIK
Im Gegensatz dazu hat das Feld eines physikalischen Dipols auch Beiträge höherer Mutilpolmomente (s.
Aufgabe 1, Blatt 7) und unterscheidet sich vom Feld eines Punktdipols stark in der Nähe der Ladungen.
33
KAPITEL 3.
Magnetostatik
Bisher: statische Quellladungen
Jetzt: Bewegte Quellladungen, aber konstanter Strom (bzw. konstante Stromdichte) ⇒ Magnetostatik
Neue Effekte, z.B.
⃗ z.B.
Grund: Bewegte Ladungen erzeugen Magnetfeld B,
Zusammen mit Lorentzkraft auf Ladung Q mit Geschwindigkeit ⃗v :
⃗
F⃗magn = Q(⃗v × B)
(3.0.1)
(Beachte: negative Ladungen, z.B. Elektronen, bewegen sich entgegengesetzt zur Stromrichtung)
Ströme werden in Ampère gemessen.
Coulomb
;<9:
C
(3.0.2)
1A = 1
s
9:;<
Sekunde
35
KAPITEL 3. MAGNETOSTATIK
Vorlesungsskript T3p Elektrodynamik
Beispiele:
(i) Linienladungsdichte der bewegten Ladungsträger λ in einem Draht
pro Zeitintervall ∆t fließt Ladung λv∆t an Punkt P vorbei ⇒ I⃗ = λ⃗v .
Kraft auf infinitesimales Drahtelement:
⃗ = λdℓ⃗v × B
⃗ = dℓI⃗ × B
⃗
F⃗magn = dq⃗v × B
⃗
= Id⃗ℓ × B
9:;<
(3.0.3)
d⃗
ℓ in Richtung von I⃗
(ii) Volumenstromdichte
⃗
⃗j ≡ dI
da⊥
⃗
⇒ Strom durch beliebige (kleine) Fläche d⃗a : j · d⃗a
(3.0.4)
Es gilt:
⃗j(⃗r, t) = ϱ(⃗r, t)⃗v (⃗r, t)
(3.0.5)
ϱ: Volumenladungsdichte der mobilen Ladungsträger
⃗v : mittlere Geschwindigkeit
Ladung, die in dt durch da⊥ geht:
dq = ϱdV = ϱda⊥ vdt
⇒ ⃗j =
dI⃗
da⊥
=
⃗
v
( dq
dt ) v
da⊥
Damit: Kraft auf stromdurchflossenes Volumen V :
*
*
⃗
⃗ = d3 r(⃗j × B)
dq ⃗v × B
F⃗magn =
9:;<
V
36
d3 rϱ
V
(3.0.6)
= ϱ⃗v
(3.0.7)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 3. MAGNETOSTATIK
Bemerkungen:
(i) Magnetische Kräfte verrichten keine Arbeit!
Wmagn
= F⃗magn · d⃗l
⃗ ) · ⃗v dt = 0
= Q(⃗v × B
9 :; <
(s. auch Bsp. 5.3 in Griffiths)
(3.0.8)
senkrecht auf ⃗
v
(ii) Ladung, die pro Zeiteinheit ein Volumen V verlässt:
!
*
⃗ · ⃗j
d⃗a · ⃗j =
d3 r ∇
(3.0.9)
Gauß
V
∂V
Ladungserhaltung:
⇒
*
⃗ · ⃗j
d r∇
3
=
d
− dt
V
=−
*
*
d3 rϱ
V
d3 r
V
=
∂ϱ
∂t
>
(3.0.10)
Da V beliebig ist, folgt
⃗ · ⃗j = − ∂ϱ
∇
∂t
(in Magnetostatik:
∂ϱ
∂t
Kontinuitätsgleichung
(3.0.11)
= 0)
(iii) Typischerweise (für v << c):
|F⃗magn | << |F⃗elektr |
(3.0.12)
⇒ F⃗elekr = 0
(3.0.13)
Aber: stromdurchflossene Leiter elektrisch neutral
und daher F⃗magn Haupteffekt.
Experimentell findet man für stationäre Ströme:
⃗ r ) = µ0 I
B(⃗
4π
bzw. (Idℓ′ → ⃗jd3 r′ )
⃗ r ) = µ0
B(⃗
4π
*
V
*
Draht
dℓ⃗′ × (⃗r − r⃗′ )
|⃗r − r⃗′ |3
⃗r − r⃗′
d3 r′⃗j(r⃗′ ) ×
|⃗r − r⃗′ |3
(3.0.14)
(3.0.15)
37
KAPITEL 3. MAGNETOSTATIK
Vorlesungsskript T3p Elektrodynamik
⎛
⃗ r) =
⎝vergleiche E(⃗
1
4πϵ0
⎞
′
⃗
⃗r − r ⎠
d3 r′ ϱ(r⃗′ )
|⃗r − r⃗′ |3
*
V
Gesetz von Biot-Savart
Bemerkung: Bewegte Punktladung bei r⃗0 (t) hat
⃗j = ϱ⃗v = qδ (3) (⃗r − r⃗0 (t))⃗v (t)
(3.0.16)
⃗ kann nicht durch Biot-Savart berechnet werden.
d.h. ⃗j ist nicht stationär ⇒ resultierendes B
Beispiel: Magnetfeld eines geraden (unendlichen Drahtes)
dℓ⃗′
r⃗′
⃗r
⃗ r)
⇒ B(⃗
=
µ0 I
4π
= dz ′ e⃗z
= z ′ e⃗z
= se⃗s + z e⃗z
*∞
−∞
0I
= µ4π
9:;<
e⃗z ×e⃗z =0
dz ′ e⃗z ×
*∞
dz ′
*∞
0I
= µ4π
e⃗ϕ
9:;<
′
z̃=z −z
−∞
(∗) :
*∞
−∞
38
dx
1
3
(a2 + x2 ) 2
3
(s2 + (z ′ − z)2 ) 2 )
9
:;
<
s
(s2
dz̃
⃗
= B(s)
B∞
B
2
1
x
B
= 2.
= 2√
B
2
2
a
a
a + x −∞
se⃗s + z e⃗z − z ′ e⃗z
e⃗s ⊥e⃗z
−∞
(∗) µ0 I e⃗ϕ
= 2π s
(3.0.17)
⃗z × e⃗s
3 e
+ (z ′ − z)2 ) 2 9 :; <
e⃗ϕ unabhängig
von z ′
s
3
(s2 + z̃ 2 ) 2
(3.0.18)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 3. MAGNETOSTATIK
Beispiel: Kraft zwischen zwei stromdurchflossenen Drähten
⃗ 2.
Kraft auf d⃗ℓ1 : F⃗1 = I1 d⃗ℓ1 × B
Beachte: andere Wegelemente dℓ⃗′ 1 erzeugen nach Biot-Savart kein Feld bei d⃗ℓ1 , da dℓ⃗′ 1 parallel ist zum
Verbindungsvektor zwischen d⃗ℓ1 und dℓ⃗′ 1 .
Zylinderkoordinaten
mit 2. Leiter entlang der z-Achse
F⃗1
= I1 d⃗ℓ1 ×
9:;<
dℓ1 e⃗z (2)
; <9 :
(2)
e
µ0 I2 ⃗ϕ
2π
d
(3.0.19)
I1 I2
= − µ02πd
e⃗s (2) dℓ1
9:;<
e⃗z ×e⃗ϕ =−e⃗s
Also:
• Kraft entlang Verbindungslinie
• I⃗1 , I⃗2 gleichsinnig ⇒ Anziehung; gegensinnig ⇒ Abstoßung
39
KAPITEL 3. MAGNETOSTATIK
Vorlesungsskript T3p Elektrodynamik
3.1. Vektorpotential
⃗ r)
B(⃗
=
µ0
4π
*
d3 r′⃗j(r⃗′ ) ×
V
⃗r − r⃗′
|⃗r − r⃗′ |3
9 :; <
⃗
−∇
*
µ0 ⃗
= 4π
∇×
9:;<
⃗ × (f V
⃗)
∇
V
⃗ ×V
⃗)−V
⃗ × (∇f
⃗ )
= f (∇
⃗j(r⃗′ )
|⃗r − r⃗′ |
(3.1.1)
⃗ × A(⃗
⃗ r)
≡∇
mit
⃗ r ) = µ0
A(⃗
4π
*
d3 r ′
⃗j(r⃗′ )
⃗ r)
+ ∇λ(⃗
|⃗r − r⃗′ |
(3.1.2)
*
dℓ⃗′
⃗ r)
+ ∇λ(⃗
|⃗r − r⃗′ |
(3.1.3)
V
bzw.
⃗ r ) = µ0 I
A(⃗
4π
J
d3
1
|⃗
r −r⃗′ |
vergleiche Φ(⃗r) =
1
4πϵ0
*
3 ′
Draht
K
ϱ(r⃗′ )
+ konst.
|⃗r − r⃗′ |
⃗ r) nicht eindeutig, da ∇
⃗ × (∇λ)
⃗ = 0 (Aufg. 2(a), Blatt 1).
A(⃗
Wähle z.B. λ = 0
*
⃗j(r⃗′ )
⃗ = µ0
⃗ ·A
⃗=0
⇒A
d3 r
⇒
∇
9:;<
4π
|⃗r − r⃗′ |
s. Aufg. 1,
Blatt 8
d r
Coulombeichung
(3.1.4)
Bemerkungen:
(i)
*
⃗ (⃗r) = ?
d3 r V
(3.1.5)
= Vx e⃗x + Vy e⃗y + Vz e⃗z
= Vr e⃗r + Vϑ e⃗ϑ + Vϕ e⃗ϕ
(3.1.6)
Aber: e⃗r , e⃗ϑ , e⃗ϕ sind ⃗r-abhängig ⇒ z.B.
*
4*
5
d3 rVr e⃗r ̸=
d3 rVr e⃗r
(3.1.7)
⃗
V
Hingegen:
⎛ *
⎞
3
d
rV
x ⎟
⎜ *
*
⎜
⎟
⎟
⃗ (⃗r) = ⎜
d3 r V
d3 rVy ⎟
⎜
⎜ *
⎟
⎝
⎠
3
d rVz
(3.1.8)
(ii) (3.1.4) gilt nur für lokalisierte Stromdichte, da Integral sonst divergiert.
Berechnung der Feldgleichungen:
(i)
⃗ ·B
⃗ =∇
⃗ · (∇
⃗ × A)
⃗ =0
∇
40
(3.1.9)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 3. MAGNETOSTATIK
(ii)
⃗ ×B
⃗
∇
⃗ × (∇
⃗ × A)
⃗ = ∇(
⃗ ∇
⃗ · A)
⃗ − ∆A
⃗
=∇
⃗ = − µ0
= −∆A
4π
9:;<
Coulombeichung
*
d3 r′⃗j(r⃗′ ) ∆
⃗ ·B
⃗
∇
⃗ ×B
⃗
∇
homogene
=0
= µ0⃗j
(3.1.10)
−4πδ (3) (⃗
r −r⃗′ )
= µ0⃗j(⃗r)
⇒
1
|⃗r − r⃗′ |
9 :; <
inhomogene
(3.1.11)
Feldgleichung der Magnetostatik
oder
⃗ = −µ0⃗j
∆A
⃗
B
⃗ ·A
⃗ = 0)
(mit ∇
⃗ ×A
⃗
=∇
(3.1.12)
⃗ ist analog zu Φ, aber (a) immer noch Vektor und (b) keine einfache Interpretation als
Bemerkung: A
potentielle Energie. Aber:
*
1
⃗ 2 d3 r
B
Wmagn 9:;<
=
2µ0
später
R3
1
2
=
9:;<
Magnetostatik
(Analogon zu Welektr =
Integrale Form:
1
2
*
d3 rϱΦ)
*
(3.1.13)
⃗
d r⃗j · A
3
R3
R3
(i)
*
∂V
⃗ =
d⃗a · B
9:;<
*
Gauß V
⃗ ·B
⃗ =0
d3 r ∇
(3.1.14)
Magnetfeld besitzt keine Ladungen!
Bemerkung: Für beliebige Fläche S:
*
⃗
Φm ≡ d⃗a · B
magnetischer Fluss durch S
(3.1.15)
⃗ × B)
⃗ = µ0 IS
d⃗a · (∇
9:;<
9 :; <
(3.1.16)
S
(ii)
!
∂S
⃗ =
d⃗ℓ · B
*
S
µ0⃗j
gesamter Strom
durch S
41
KAPITEL 3. MAGNETOSTATIK
Vorlesungsskript T3p Elektrodynamik
Ampère’sches Gesetz
3.2. Multipolentwicklung
⃗ r)
A(⃗
=
µ0
4π
*
µ0
= 4π
9:;<
Aufg. 2
Blatt 6
=
µ0 1
4π [ r
⃗j(r⃗′ )
|⃗r − r⃗′ |
*
∞
&
1
d3 r′ (r′ )ℓ Pℓ (cos 9:;<
ϑ′ )⃗j(r⃗′ )
rℓ+1
d3 r ′
ℓ=0
Winkel zwischen
⃗
r und r⃗′
*
d3 r′⃗j(r⃗′ ) + r12
:;
<
9
*
d3 r′ r′ cos ϑ′⃗j(r⃗′ ) + O
= 0, da lokalisierte Stromverteilung
⇒ in jeder Richtung gleich viele
positive und negative Beiträge
=
µ0 1
4π [ r 2
*
d3 r′ ( ⃗er ·r⃗′⃗j(r⃗′ )) + O
9:;<
⃗
r
r
@
1
r3
A
@
1
r3
A
]
(3.2.1)
]
= (siehe Appendix A)
=
@ A
µ0 m
⃗ × ⃗r
+O r13
3
4π
r
9 :; <
Dipolbeitrag
mit
m
⃗ =
1
2
*
d3 r′ r⃗′ × ⃗j(r⃗′ )
(3.2.2)
magnetisches Dipolmoment
Beispiel: Dipolmoment einer vom Strom I durchflossenen Drahtschleife (Radius R)
d3 r′⃗j(r⃗′ ) → Idℓ⃗′
42
(benutze ⃗j = Iδ(s − R)δ(z)e⃗ϕ )
(3.2.3)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 3. MAGNETOSTATIK
*
1
m
⃗ = I
2
r⃗′ × dℓ⃗′
(3.2.4)
Draht
dℓ⃗′ = R dϕ′ e⃗ϕ
r⃗′ = 9:;<
s′ e⃗s + 9:;<
z ′ e⃗z
=0
R
⇒
r⃗′
′
× dℓ = R2 e⃗s × e⃗ϕ dϕ′
9 :; <
(3.2.5)
e⃗z
⇒m
⃗ =
1
2
2 IR e⃗z
*2π
dϕ′ = πIR2 e⃗z
0
9 :; <
2π
Magnetfeld für r >> R:
⃗ × ⃗r
⃗ = µ0 m
A
4π r3
ohne Beweis:
⃗ − mr
⃗ 2
⃗ dip = ∇
⃗ ×A
⃗ = µ0 3⃗r(⃗r · m)
B
4π
r5
(3.2.6)
reines Dipolfeld
(3.2.7)
⃗ dip (elektrischer Punktdipol)
Vergleiche E
⃗ dip :
reines magnetisches Dipolfeld B
physikalischer magnetischer Dipol:
43
KAPITEL 3. MAGNETOSTATIK
Vorlesungsskript T3p Elektrodynamik
⃗ dip für kleine r.
Unterschied zu B
Bemerkung:
(i) Wie im Fall des elektrischen Dipols richtet sich auch ein magnetischer Dipol im äußeren Feld aus
⃗ ext
Vpot = −m
⃗ ·B
(3.2.8)
vergleiche Kompassnadel im (Dipol-) Feld der Erde.
(ii) Frage: Magnetische Kraft auf eine Testladung q mit Geschwindigkeit ⃗v :
⃗
F⃗magn = q⃗v × B
Aber: ⃗v hängt von Bezugssystem ab!?
z.B. Betrachte
aus Bezugssystem, in dem Testladung q − in Ruhe ist.
Wie erklärt sich nun die Anziehung von q − durch den Draht?
44
(3.2.9)
KAPITEL 4.
Maxwellgleichungen
⃗ B,
⃗ ⃗j, ϱ zeitunabhängig.
Bisher: E,
Allgemein:
Maxwellgleichungen
⎧
⃗ · E(⃗
⃗ r, t)
∇
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⃗ × E(⃗
⃗ r, t)
∇
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
und Lorentzkraft (auf Ladung q):
F⃗L = q
⃗ · B(⃗
⃗ r, t)
∇
⃗ × B(⃗
⃗ r, t)
∇
=
1
r, t)
ϵ0 ϱ(⃗
=−
9
⃗ r, t)
∂ B(⃗
∂t <
:;
Induktionsterm
=0
(4.0.1)
⃗ r, t)
∂ E(⃗
= µ0⃗j(⃗r, t) + µ0 ϵ0
:;∂t <
9
Verschiebungsstrom
⃗ r0 , t)]
⃗ ⃗r0 , t) + ⃗v (t) × B(⃗
[E(
9:;<
(4.0.2)
Position
der Ladung
Bemerkung:
(i) Induktionsterm (Faraday, 1831)
Induzierte Spannung
U=
*
∂S
⃗ =
d⃗ℓ · E
*
S
⃗ ×E
⃗ =−
d⃗a · ∇
*
S
d⃗a ·
⃗
∂B
∂t
S konstant
;<9:
=
−
d
dt
*
⃗ = −Φ̇m
d⃗a · B
(4.0.3)
S
Relativitätsprinzip: selbe Spannung (U = −Φ̇m ) wenn Drahtschleife auf Magneten zubewegt wird.
45
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
Beachte: Magnet bewegt erzeugt Strom (wegen Induktionsterm); Drahtschleife bewegt erzeugt ebenfalls Strom (diesmal wegen Lorentzkraft, da sich die beweglichen Ladungen im Draht im Magnetfeld
bewegen).
Lenz’sche Regel: Induzierte Spannung
→ Strom
→ Magnetfeld, dessen Fluss der Flussänderung entgegenwirkt
Analogie (für ϱ = 0): vergleiche
⃗
⃗ ×E
⃗ = − ∂B ,
∇
∂t
mit Magnetostatik:
⇒
!
⃗ ×B
⃗ = µ0⃗j,
∇
⃗ = − dΦ
d⃗ℓ · E
dt
⃗ ·E
⃗ =0
∇
⃗ ·B
⃗ =0
∇
Faraday’sches Gesetz
(4.0.4)
(4.0.5)
(4.0.6)
(Analogon zu Ampère’schem Gesetz )
⃗˙ auf rechter Seite in (4.0.4) ist meistens nicht zeitunabhängig im Gegensatz zu ⃗j
Beachte aber: −B
⃗ und damit Φ̇ häufig näherungsweise durch Methoden der
in Magnetostatik. Trotzdem kann man B
Magnetostatik berechnen, wenn
⃗ nicht zu stark sind
(i) zeitliche Fluktuationen von B
(ii) Entfernung von Strom nicht zu groß ist
⇒ Quasistatisches Regime
Faraday: Vereinheitlichung von Elektrizität und Magnetismus
(ii) Verschiebungsstrom (Maxwell, 1861)
(a) wichtig, um (lokale) Ladungserhaltung zu garantieren, d.h.
∂ϱ ⃗ ⃗
+∇·j =0
(Kontinuitätsgleichung)
∂t
*
*
d
⇒
d3 rϱ(⃗r, t) = − d⃗a · ⃗j(⃗r, t)
dt
V
∂V
9
:;
< 9
:;
<
Änderung der
Ladung in V
Vor Maxwell:
Denn:
aber:
⃗ ×B
⃗ = µ0⃗j
∇
(4.0.7)
(4.0.8)
Strom durch
Oberfläche ∂V
inkonsistent!
⃗ ·∇
⃗ ×B
⃗ =0
∇
(4.0.9)
(4.0.10)
i.A.
∂ϱ
!
⃗ · (µ0⃗j) =
∇
9:;< −µ0 ∂t ̸= 0
(4.0.11)
Kontinuitätsgleichung
Mit Verschiebungsstrom:
⃗ · ⃗j
µ0 ∇
⇔ Kontinuitätsgleichung
⃗ · ∂E
⃗
= −ϵ0 µ0 ∇
∂t
∂ ⃗
⃗
= −ϵ0 µ0 ∂t ∇
·E
9 :;
<
= −µ0 ∂ϱ
∂t
1
ϵ0
ϱ
(b) weitere Inkonsistenz im Ampère-Gesetz (ohne Verschiebungsstrom)
46
(4.0.12)
Vorlesungsskript T3p Elektrodynamik
!
KAPITEL 4. MAXWELLGLEICHUNGEN
Stokes
⃗
d⃗ℓ · B
C
Okay für S1 , aber IS2 = 0.
Lösung:
!
C
;<9:
=
⃗
d⃗ℓ · B
µ0 IS
=
9:;<
nach Ampère’schem Gesetz
µ0 IS + µ0 ϵ 0
AmpèreMaxwellGesetz
*
d⃗a ·
⃗
∂E
∂t
(4.0.13)
(4.0.14)
S
mit
E
=
1
ϵ0 A Q
⇒ Ė
=
1
ϵ0 A I
(vgl. 2.6.3, A : Fläche der Kondensatorplatten)
(4.0.15)
(c) Experimentell: Kurzschließen eines Plattenkondensators
(d) Verschiebungsstrom essentiell für Existenz elektromagnetischer Wellen (siehe später).
Maxwell: Vereinheitlichung von Elektrizität, Magnetismus und Optik
(Elektromagnetische Wellen: Hertz 1888)
4.1. Induktivität
Erinnerung aus Magnetostatik:
47
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
⃗ 1 ∼ I 1 ⇒ Φ2 =
B
9:;<
9:;<
*
Biot-Savart Fluss von B
⃗1
durch Schleife2
D.h.
⃗ 1 ∼ I1
d⃗a2 · B
Φ2 = M21 I1
9:;<
(4.1.1)
(4.1.2)
(Gegen-)
Induktivität
Φ2
=
*
⃗1 =
d⃗a2 · B
*
⃗ ×A
⃗1 =
d⃗a2 · ∇
! !
!
⃗1
d⃗ℓ2 · A
C2
d⃗ℓ1
=
d⃗ℓ2 ·
|⃗r − r⃗′ |
C2 C1
! ! ⃗
dℓ1 · d⃗ℓ2
µ0
⇒ M21 = 4π
= M12 ≡ M
|⃗r − r⃗′ |
µ 0 I1
4π
(4.1.3)
C2 C1
Bemerkung:
(i) M hängt nur von Geometrie (Form und Lage) der Schleifen ab
(ii) Φ2 für Strom I durch Schleife 1 ist gleich Φ1 für Strom I durch Schleife 2 (unabhängig von Form
und Lage der Schleifen)
Bei langsamer Änderung von I1 :
U2 = −
dI1
dΦ2
= −M
dt
dt
(4.1.4)
1
Ebenso Φ1 = LI1 , U1 = −L dI
dt , L: Selbstinduktivität.
Lenz’sche Regel ⇒ Selbstinduktivität gibt Widerstand gegen Stromänderung (analog zur Masse in Mechanik), d.h. man muss Arbeit aufwenden, um Strom in Gang zu setzen. Energie ist dann im Magnetfeld
gespeichert (siehe später).
4.2. Energiebilanz
Energiedichte in elektrischen und magnetischen Feldern (Elektrostatik W =
ϵ0
2
*
⃗ 2 ).
d3 r E
⃗ r, t), B(⃗
⃗ r, t) bewegen (die
Betrachte Ladungs- und Stromverteilung ϱ(⃗r, t), ⃗j(⃗r, t), die sich in Feldern E(⃗
die von ϱ und ⃗j erzeugten Felder einschließen).
Lorentzkraft verrichtet Arbeit an den Ladungen, z.B. an Ladung q = ϱd3 r.
48
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
F⃗ · d⃗ℓ =
=
=
ϱ⃗
v =⃗j
=
⃗ + ⃗v × B)
⃗ · ⃗v dt
q(E
⃗
q E · ⃗v dt
⃗ · ⃗v dt d3 r
ϱE
⃗ · ⃗j dt d3 r
E
(4.2.1)
Damit ändert sich die (kinetische und potentielle) Energie Emat , die in geladener Materie im Volumen V
steckt, pro Zeit gemäß:
(Annahme: keine Materie fließt aus V heraus)
*
dEmat
⃗
(4.2.2)
= d3 r ⃗j · E
dt
V
⃗
⃗j · E
⃗ × B)
⃗ ·E
⃗ − ϵ0 ∂ E⃗ · E
⃗
= µ10 (∇
∂t
9:;<
AmpèreMaxwell
⃗ · (E
⃗ × B)
⃗ +
= − µ10 ∇
9:;<
1 ⃗
µ0 B
⃗ · (E
⃗ × B)
⃗
∇
⃗ · (∇
⃗ × E)
⃗
=B
⃗ · (∇
⃗ × B)
⃗
−E
Definiere:
⃗ · (E
⃗ × B)
⃗ −
= − µ10 ∇
uem =
Damit:
⃗ × E)
⃗ − ϵ0 ∂ E⃗ 2
· (∇
9 :; < 2 ∂t
⃗˙
= −B
Faraday
1 ∂
⃗2
2 ∂t (ϵ0 E
+
(4.2.3)
1 ⃗2
µ0 B )
1
⃗2 + 1 B
⃗ 2)
(ϵ0 E
2
µ0
(4.2.4)
⃗ × B)
⃗
⃗ = 1 (E
S
µ0
(4.2.5)
*
∂
⃗ ·S
⃗
=− d r
uem (⃗r, t) − d3 r ∇
∂t
V *
! V
d
mat
⃗
d3 r uem = − d⃗a · S
+ dt
⇒ dEdt
(4.2.6)
dEmat
dt
*
3
V
∂V
Vergleich mit lokaler Ladungserhaltung
dQ
=−
dt
!
d⃗a · ⃗j
(4.2.7)
∂V
zeigt:
uem : Energiedichte der elektrischen und magnetischen Felder
⃗ Energiestromdichte der elektrischen und magnetischen Felder, Poynting-Vektor
S:
Aus (4.2.6):
!
d
⃗
⇒ (Emat + Eem ) = − d⃗a · S
dt
(4.2.8)
∂V
beschreibt lokale Energieerhaltung (unter der Annahme, dass keine Materie aus V herausfließt).
Bemerkung: In einer relativistisch invarianten Theorie wie dem Elektromagnetismus (später mehr) gilt
immer: Energiestromdichte = c2 Impulsdichte
⃗ und B
⃗ haben Impulsdichte
⇒E
⃗
S
⃗ × B)
⃗
⃗gem = 2 9:;<
=
ϵ0 (E
(4.2.9)
c 2
1
c = µ ϵ
0 0
siehe später
Wichtig für Impulserhaltung in der Elektrodynamik:
49
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
D.h. die magnetische Kraft auf q2 ist nicht entgegengesetzt zu der auf q1
⇒ 3. Newtonsches Axiom gilt nicht in Elektrodynamik
⇒ Gesamtimpuls von q1 und q2 nicht erhalten! Impulserhaltung gilt nur für den Gesamtimpuls von q1 , q2
und elektrischen und magnetischen Feldern.
⃗
Beispiele für S:
(i) Aufladen eines Kondensators
Energie dringt ringsum vom Rand her ein
(ii) Stromdurchflossener Draht: siehe Übung
(iii) Statischer Stabmagnet neben statischer Punktladung ⇒ kreisförmig zirkulierender Energiestrom
50
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
Situation scheint statisch. Das Magnetfeld des Stabmagneten beruht jedoch auf mikroskopischer
Ebene auf bewegten elektrischen Ladungen.
4.3. Ebene Wellen
Im Vakuum (ϱ = 0 = ⃗j):
⃗ ·E
⃗
∇
⃗ ·B
⃗
∇
= 0,
= 0,
⇒
Übung
⃗˙
= −B
⃗ ×E
⃗
∇
⃗ ×B
⃗
∇
⃗˙
= µ0 ϵ 0 E
⃗ − µ0 ϵ 0 ∂ E
∆E
∂t2
2
⃗
=0
2
⃗
=0
⃗ − µ0 ϵ 0 ∂ B
∆B
∂t2
(4.3.1)
(4.3.2)
⃗ B
⃗ erfüllt die dreidimensionale Wellengleichung
D.h. jede kartesische Komponente von E,
1 ∂2f
=0
v 2 ∂t2
(4.3.3)
m
1
= 3 · 108
=c
ϵ 0 µ0
s
(4.3.4)
∆f −
mit
v=√
⇒ Licht ist eine elektromagnetische Welle.
Eindimensionales Analogon:
∂2f
1 ∂2f
−
=0
∂x2
v 2 ∂t2
(4.3.5)
f (x, t) = g(x − vt) + h(x + vt)
(4.3.6)
hat allgemeine Lösung
mit beliebigen zweifach differenzierbaren Funktionen g und h.
Dann (t = 0):
51
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
t = t0 > 0 (Annahme: v > 0)
D.h. g(x − vt) beschreibt Welle, die nach rechts läuft; h(x + vt) beschreibt Welle, die nach links läuft.
Sketch eines Beweises: Sei x− = x − vt, x+ = x + vt. Dann
0=
1 ∂2f
∂2f
∂2f
−
=
·
·
·
=
4
∂x2
v 2 ∂x2
∂x− ∂x+
(4.3.7)
Nachtrag: Allgemeine Flussregel
Elektromotorische Kraft (EMK):
ε
= Tangentialkraft pro Einheitsladung im Draht, integriert über Länge d. Stromkreises
*
d⃗ℓ · f⃗
=
(4.3.8)
Stromkreis
⃗ + ⃗v × B
⃗
mit f : Kraft pro Einheitsladung f⃗ = E
Faraday’sches Flussgesetz
ε=−
Beispiel:
52
dΦm
,
dt
Φm : magnetischer Fluss durch Stromkreis
(4.3.9)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
(1) Magnetfeldänderung
⃗˙
= −B
*
⃗ ×E
⃗
∇
⇒ε
=
Schleife
⃗
d⃗ℓ · E
(4.3.10)
Die resultierende EMK kann als induzierte Spannung an den Schnittstellen gemessen werden, wenn
man die Drahtschleife an einer Stelle aufschneidet
(2) Schleife bewegt oder deformiert
⃗ ×E
⃗
∇
⇒ε
=0*
=
Schleife
9
⃗+
d⃗ℓ · E
:;
=0
⃗ ×E
⃗ =0
∇
*
Schleife
⃗
d⃗ℓ · (⃗v × B)
(4.3.11)
<
Führt wieder zu induzierter Spannung an Schnittstellen
(3) (vergleiche Aufgabe 2 der 4. Zentralübung)
53
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
*
=
ε
=
Stromkreis
*
Stab
⃗
d⃗ℓ · (⃗v × B)
⃗
d⃗ℓ · (⃗v × B)
= −wvB
Φ̇m = B w L̇ = B w v
−ε entspricht Spannung am Widerstand
U =IR
Ohm’sches Gesetz
(4.3.12)
(4.3.13)
(4.3.14)
Ohm’sches Gesetz folgt aus
⃗j = σ f⃗
9:;<
Leitfähigkeit
⃗ oder f⃗ = E
⃗ + ⃗v × B,
⃗ ϱ ≡ 1 : spezifischer Widerstand)
(f⃗ = E
σ
(4.3.15)
(4.3.16)
U = φ1 − φ2
⃗ homogen, E = U
E
L
σA
I = |⃗j| · A = σ E A =
U
L
9:;<
(4.3.17)
P = UI ,
(4.3.19)
(4.3.18)
1
≡R
[Nebenbemerkung: Die Leistung des Widerstands (d.h. die Energie, die pro Zeit im Widerstand in
Wärme umgewandelt wird) ist gegeben durch:
da U die pro Ladungseinheit verrichtete Arbeit ist und I die Ladung pro Zeiteinheit.]
54
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
Im Leiter:
|⃗j|
≈0
σ
⃗ und entlang Stab gilt
D.h. entlang horizontaler Drähte φ = konst (da sonst f⃗ = E)
|f⃗| =
⃗ + ⃗v × B
⃗ ≈0
f⃗ = E
*
*
⃗ =−
⃗ = −ε
⇒U =
d⃗ℓ · E
d⃗ℓ · (⃗v × B)
Stab
(4.3.20)
(4.3.21)
(4.3.22)
Stab
Nachtrag Ende.
Bemerkungen (Fortführung eindimensionale Wellen):
(i) Besonders wichtig: sinusartige Wellen
nach rechts:
f (x, t) = A cos(k(x − vt) + δ)
(4.3.23)
mit
A: Amplitude,
δ ∈ [0, 2π[: Phasenkonstante (Verzögerung des Maximums bei t = 0),
k: Wellenzahl (→ λ = 2π
k : Wellenlänge),
2π
λ
T = kv = v : Periode,
ν = T1 : Frequenz → ω = 2πν = kv: Kreisfrequenz, ⇒ f = A cos(kx − ωt + δ)
nach links
f (x, t) = A cos(kx + ωt − δ) = A cos(−kx − ωt + δ)
d.h. wie rechts laufend mit k → −k und dann λ =
2π
|k| , ω
(4.3.24)
= |k|v.
(ii) Komplexe Notation:
komplexe Wellenfunktion:
eiθ = cos θ + i sin θ
6
7
f (x, t) = Re A ei(kx−ωt+δ)
f˜(x, t) = Ã ei(kx−ωt) ,
à = A eiδ
⇒ f (x, t) = Re[f˜(x, t)]
(4.3.25)
(4.3.26)
(4.3.27)
(4.3.28)
Vorteil: Exponentialfunktion einfacher als sin und cos
55
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
(iii) Allgemeine Lösung ist Linearkombination
*∞
f˜(x, t) =
Ã(k) ei(kx−ωt) dk
(4.3.29)
−∞
mit ω = |k|v.
Zurück zu 3 Dimensionen:
Allgemeine Lösung
f (⃗r, t) = Re
*
⃗
d3 k Ã(⃗k) ei(k·⃗r−ωt)
(4.3.30)
mit ω = v|⃗k|
⇒ In Folge: Beschränkung auf ebene, monochromatische Wellen
⃗˜ r, t) = E
⃗˜0 ei(⃗k·⃗r−ωt) ,
E(⃗
⃗˜ = B
⃗˜0 ei(⃗k·⃗r−ωt)
B
(4.3.31)
Eben:
monochromatisch: nur eine Frequenz ω
⃗k: Wellenvektor
Beachte: Vakuum-Maxwellgleichung ⇒ Wellengleichung, aber nicht umgekehrt, d.h. die Maxwellgleichungen geben Extrabedingungen
Eigenschaften elektromagnetischer Wellen im Vakuum
⃗˜ = E
⃗˜0 ei(⃗k·⃗r−ωt) ,
E
mit
ω = |⃗k| c
⃗˜ = B
⃗˜0 ei(⃗k·⃗r−ωt)
B
(4.3.32)
(4.3.33)
Dispersionsrelation
(i)
⃗ ·E
⃗
0=∇
⎡
⎢
⎢
⎢
⎢
⎢
⎣
56
⃗˜0
⇒ ⃗k · E
0
⇒
9:;<
⃗ reell
⃗ · Re E
⃗˜ ∇
⃗ · E)
⃗˜
=∇
= Re(∇
6
7
⃗˜0 ei(⃗k·⃗r−ωt)
= Re i⃗k · E
(4.3.34)
=0
= Re[i(a + ib) eiα(⃗r,t) ]
= Re[(ia − b)(cos α + i sin α)]
= −b cos α − a sin α
a=0=b
cos α und sin α
linear unabhängig
⎤
⎥
⎥
⎥
⎥
⎥
⎦
(4.3.35)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
Damit:
reell
⃗˜ ⃗k =
⃗˜
= ⃗k · Re E
Re(⃗k · E)
⃗k · E
⃗
⃗˜ ei(⃗k·⃗r−ωt) ] = 0
= Re[⃗k · E
9 :; <0
(4.3.36)
=0
Ebenso:
⃗k · B
⃗ =0
D.h.:
(4.3.37)
Elektromagnetische Wellen im Vakuum transversal (→ 2 Polarisationsrichtungen)
(ii)
0
⃗ ·E
⃗ +B
⃗˙
=∇
⃗ × Re E
⃗˜ +
=∇
∂
∂t
⃗ ×E
⃗˜ +
= Re[∇
˜
∂ ⃗
∂t B]
⃗˜
Re B
(4.3.38)
⃗˜ − ω B)]
⃗˜
= Re[i(⃗k × E
⃗˜0 − ω B
⃗˜0 ) ei(⃗k·⃗r−ωt) ]
= Re[i(⃗k × E
⃗˜ und B
⃗˜ dasselbe ⃗k und ω aufweisen müssen, da diese
[Nebenbemerkung: Hieran sieht man, dass E
Maxwellgleichung sonst nicht für alle ⃗r und t erfüllt sein könnte.]
⃗
⃗˜0 − ω B
⃗˜0 = 0 ⇔ B
⃗˜0 = k k × E
⃗˜0
⇒ ⃗k × E
ω
k
9:;<
(4.3.39)
1
c
Damit:
⃗
B
⃗˜ = Re(B
⃗˜0 ei(⃗k·⃗r−ωt) )
= Re B
⃗
⃗˜0 ei(⃗k·⃗r−ωt) ]
= Re[ 1c kk × E
k
1 ⃗
c k
=
denn
D.h.
reell ⃗
= 1c kk
1⃗
k
ck
(4.3.40)
⃗˜0 ei(⃗k·⃗r−ωt) )
× Re(E
⃗
×E
⃗ r, t)|
⃗ r, t)| = 1 |E(⃗
⇒ |B(⃗
c
(4.3.41)
|⃗a × ⃗b| = |⃗a||⃗b| sin(!(a, b))
(4.3.42)
⃗ und B
⃗ senkrecht aufeinander, in Phase mit Amplituden
E
⃗ =
|B|
1 ⃗
|E|
c
(4.3.43)
57
KAPITEL 4. MAXWELLGLEICHUNGEN
z.B.
Vorlesungsskript T3p Elektrodynamik
⎞
E0
⃗˜0 = ⎝ 0 ⎠ ,
E
0
⎛
⎛
⃗˜0 = ⎝
B
0
E0
c
0
⎞
⎠
(4.3.44)
Bemerkung:
(i) Zirkular polarisierte Wellen durch Wahl
Phase (Ẽ0 )x = Phase (Ẽ0 )y + π2
(ii)
⃗
S
∼
⃗ ×B
⃗
E
∼
⃗ × (⃗k × E)
⃗
E
9
:;
<
(4.3.45)
⃗
⃗ 2 −E
⃗ E⃗· ⃗
kE
k
# $% &
=0
⇒ Energiefluss in Richtung
⃗
k
k
(iii) Wellen in Hohlräumen müssen nicht transversal sein, siehe 9.5.1 in Griffiths und Übung
(iv) Wellen in Materie können andere Eigenschaften haben.
4.4. Randbedingungen an Metallwänden
Anwendung: Wellen in metallischen Hohlräumen oder Wellenleitern.
Annahme: Felder variieren langsam genug, dass sich die Ladungen im Leiter schnell genug einstellen
⃗ = 0 zu garantieren.
können, um im Inneren des Leiters E
d
58
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
⃗t: Einheitstangentialvektor, d⃗a aus Seitenebene heraus
*
*
⃗ × E)
⃗
⃗
d⃗a · (∇
= d⃗ℓ · E
S
∂S
⃗ Vakuum · ⃗t L
→ E
9:;<
∂
= − ∂t
*
d → 0 und
L so klein,
⃗ Vakuum
dass, E
näherungsweise
konstant ist
(4.4.1)
⃗ →0
d⃗a · B
S
9 :; <
d→0
≤Bmax L d → 0
# $% &
Maximum von
⃗ entlang S
|B|
⃗ · ⃗t = 0
E
am Rand
(4.4.2)
⃗
⃗ ×E
⃗ = −B
⃗˙
Ein periodisches Magnetfeld senkrecht zur Wand induziert tangentiales E-Feld
via ∇
⃗ · ⃗t = 0
im Widerspruch zu E
⃗ · ⃗n = 0
⇒ B
am Rand
(für ein periodisches Magnetfeld)
(4.4.3)
4.5. Elektromagnetische Potentiale
Erinnerung:
⃗ ×E
⃗ =0⇒E
⃗ = −∇Φ
⃗
(i) Elektrostatik: ∇
⃗ ·B
⃗ =0⇒B
⃗ =∇
⃗ ×A
⃗
(ii) Magnetostatik: ∇
Allgemein:
⃗ ·B
⃗ =0⇒ B
⃗ =∇
⃗ ×A
⃗
∇
⃗ ×E
⃗+
∇
⃗
∂B
∂t
⃗ × (E
⃗+
=0 ⇔∇
⃗+
⇒E
⃗
∂A
∂t
(4.5.1)
⃗
∂A
∂t )
=0
⃗
= −∇Φ
(4.5.2)
⃗
⃗ = −∇Φ
⃗ − ∂A
E
∂t
⃗
Feldgleichungen für Φ, A:
59
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
(i)
⃗ ·E
⃗ = ϱ ⇒ −∆Φ − ∂ (∇
⃗ · A)
⃗ = ϱ
∇
ϵ0
∂t
ϵ0
(4.5.3)
(ii)
⃗
∂E
⃗ × B
⃗
⃗
∇
9:;< −µ0 ϵ0 ∂t = µ0 j
⃗ A
⃗
∇×
4
⃗ + ∇(
⃗ ∇
⃗ · A)
⃗ + µ0 ϵ 0 ∇
⃗ ∂Φ +
⇒ −∆A
∂t
⃗
∂2A
∂t2
5
(4.5.4)
= µ0⃗j
⃗
∂Φ
⃗ − µ0 ϵ 0 ∂ 2 A
⃗
⃗ ⃗
⃗
⇒ ∆A
∂t2 − ∇(µ0 ϵ0 ∂t + ∇ · A) = −µ0 j
⃗ nicht eindeutig
Eichfreiheit: Φ, A
⃗ ′ (⃗r, t) = A(⃗
⃗ r, t) + ∇λ(⃗
⃗ r, t)
A
Φ′ (⃗r, t) = Φ(⃗r, t) −
∂λ(⃗
r ,t)
∂t
⃗ ×A
⃗′ = ∇
⃗ ×A
⃗+∇
⃗ × ∇λ
⃗ =∇
⃗ ×A
⃗=B
⃗
⇒∇
9 :; <
und
⃗ ′−
−∇Φ
(4.5.5)
=0
⃗′
∂A
∂t
⃗ +∇
⃗ ∂λ −
= −∇Φ
∂t
⃗
∂A
∂t
−
⃗
∂(∇λ)
∂t
⃗ −
= −∇Φ
⃗
∂A
∂t
⃗
=E
Wähle Lorenzeichung:
⃗ ·A
⃗ + µ0 ϵ0 ∂Φ = 0
∇
∂t
(4.5.6)
Damit:
2
"Φ
≡ ∆Φ − µ0 ϵ0 ∂∂tΦ
2
= − ϵϱ0
⃗
"A
⃗
⃗ − µ0 ϵ 0 ∂ 2 A
≡ ∆A
∂t2
= −µ0⃗j
(4.5.7)
": D’Alembert-Operator, 4-dim Analogon zum Laplace-Operator
Bemerkungen:
(i) vier entkoppelte Differentialgleichungen für Φ, Ax , Ay , Az
(ii) Inhomogene Wellengleichung ∆ψ −
1
v 2 ψ̈
= σ mit v 2 =
[Zusammen mit
⃗ =∇
⃗ ×A
B
⃗ = −∇Φ
⃗ −
E
1
µ 0 ϵ0
≡ c2
⃗
∂A
∂t
(4.5.8)
⃗ ·A
⃗ + µ0 ϵ0 ∂Φ = 0 äquivalent zu Maxwell-Gleichungen. ]
und Lorenzeichung ∇
∂t
4.6. Lösung der Wellengleichung
Erinnerung: Statik
*
ϱ(r⃗′ )
1
d3 r ′
4πϵ0
|⃗r − r⃗′ |
*
⃗j(r⃗′ )
⃗ r ) = µ0
d3 r ′
A(⃗
4π
|⃗r − r⃗′ |
Φ(⃗r) =
Aber: Information überträgt sich mit Geschwindigkeit c.
60
(4.6.1)
(4.6.2)
Vorlesungsskript T3p Elektrodynamik
⇒ Erwartung:
KAPITEL 4. MAXWELLGLEICHUNGEN
*
ϱ(r⃗′ , tr )
1
d3 r ′
4πϵ0
|⃗r − r⃗′ |
*
⃗j(r⃗′ , tr )
⃗ ret (⃗r, t) = µ0
d3 r ′
A
4π
|⃗r − r⃗′ |
(4.6.3)
Φret (⃗r, t) =
(4.6.4)
Retardierte Potentiale
Beachte: Nichttriviale Erwartung, z.B.
⃗ r, t) ̸=
E(⃗
1
4πϵ0
*
d3 r′ ϱ(r⃗′ , tr )
⃗r − r⃗′
|⃗r − r⃗′ |3
(4.6.5)
⃗ ret erfüllen inhomogene Wellengleichung und Lorenzeichung.
Check: Φret , A
Hier nur "Φret = − ϵ10 ϱ(⃗r, t).
Beweis: Wichtig: Φret hängt von ⃗r direkt und über tr ab!
J
K
*
7
6 ∇ϱ
⃗
1
1
⃗ ret =
⃗
∇Φ
d3 r ′
+ ϱ∇
4πϵ0
|⃗r − r⃗′ |
|⃗r − r⃗′ |
:;
<
9
=−
(1)
⃗
r −r⃗′
|⃗
r −r⃗′ |3
⃗ r = − 1 ϱ̇ ∇|⃗
⃗ = ϱ̇ ∇t
⃗ r − r⃗′ |
∇ϱ
9:;<
c 9 :; <
∂
∂
∂tr
⃗ ret
⇒ ∇Φ
= ∂t
1
=
4πϵ0
(4.6.6)
(4.6.7)
⃗
r −r⃗′
|⃗
r −r⃗′ |
*
d3 r ′
N
ϱ̇ ⃗r − r⃗′
⃗r − r⃗′
−
−ϱ
c |⃗r − r⃗′ |2
|⃗r − r⃗′ |3
O
(4.6.8)
61
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
⃗ · (f⃗
∇
v)
⃗ ·⃗
⃗
=f ∇
v +⃗
v · ∇f
⃗ · (∇Φ
⃗ ret )
∇
1
4πϵ0
*
d3 r ′
N
1
−
c
;<9:
=
J
⃗r − r⃗′
⃗ ϱ̇) + ϱ̇ ∇
⃗ ·
· (∇
|⃗r − r⃗′ |2
J
⃗r − r⃗′
|⃗r − r⃗′ |2
KK
−
J
KO
⃗′
⃗r − r⃗′ ⃗
⃗
r
−
r
⃗ ·
(∇ ϱ) + ϱ ∇
|⃗r − r⃗′ |3
|⃗r − r⃗′ |3
(4.6.9)
(2)
⃗′
⃗ ϱ̇ = − 1 ϱ̈ ⃗r − r
∇
c |⃗r − r⃗′ |
(4.6.10)
(3)
⃗′
1
⃗ · ⃗r − r =
∇
′
2
|⃗r − r⃗ |
|⃗r − r⃗′ |2
(4)
⃗ ·
∇
(1) - (4)
⇒
∆Φret
1
=
4πϵ0
*
J
⃗r − r⃗′
|⃗r − r⃗′ |2
3 ′
d r
N
(für r⃗′ = 0, s. Aufg. 1 (b), Blatt 1)
K
= −∆
1
|⃗r − r⃗′ |
(4.6.11)
= 4πδ (3) (⃗r − r⃗′ )
(4.6.12)
O
1
ϱ̈
1
1
(3)
′
⃗
− 4πϱδ (⃗r − r ) = 2 ∂t2 Φret − ϱ
2
′
⃗
c |⃗r − r |
c
ϵ0
(4.6.13)
⃗ ret :
Mit Φret und A
⃗ ret = 1
⃗ r, t) = −∇Φ
⃗ ret − ∂ A
E(⃗
∂t
4πϵ0
(wobei
1
c2
*
3 ′
d r
N
˙ ⃗′
⃗j(
ϱ̇(r⃗′ , tr ) ⃗r − r⃗′
r , tr )
⃗r − r⃗′
ϱ(r⃗′ , tr )
+
−
′
3
′
2
2
⃗
⃗
c
|⃗r − r |
|⃗r − r |
c |⃗r − r⃗′ |
O
(4.6.14)
= µ0 ϵ0 ) und (ohne Beweis, s. Kapitel 10.2.2 in Griffiths)
⃗ r, t) = ∇
⃗ ×A
⃗ ret = µ0
B(⃗
4π
*
3 ′
d r
N
O
˙ ⃗′
⃗j(
⃗j(r⃗′ , tr )
r , tr )
+
× (⃗r − r⃗′ )
|⃗r − r⃗′ |3
c |⃗r − r⃗′ |2
(4.6.15)
Zeitabhängige Verallgemeinerungen des Coulomb- und Biot-Savart-Gesetzes.
Bemerkungen:
˙
⃗ und ⃗j˙ in B
⃗ fallen in großer Entfernung ab wie
(i) Die Terme proportional zu ϱ̇ und ⃗j in E
1
im
statischen
Fall
⇒
Strahlungsterme
r2
1
r
anstatt
(ii) Auch
⃗′
*
ϱ(r⃗′ , ta )
1
d3 r ′
4πϵ0
|⃗r − r⃗′ |
*
⃗j(r⃗′ , ta )
µ0
=
d3 r ′
4π
|⃗r − r⃗′ |
Φav =
(4.6.16)
⃗ av
A
(4.6.17)
mit ta = t + |⃗r−cr | (avancierte Zeit) sind Lösungen der inhomogenen Wellengleichungen, aber
verletzen Kausalität ⇒ unphysikalisch
62
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
4.7. Felder einer bewegten Punktladung
Zunächst Potentiale einer Punktladung q, die sich entlang einer Trajektorie ω
⃗ (t) bewegt.
Retardierte Zeit über |⃗r − ω
⃗ (tr )| = c(t − tr ).
*
*
1
1
ϱ(r⃗′ , tr )
1
Φret (⃗r, t) =
d3 r ′
d3 r′ ϱ(r⃗′ , tr )
=
4πϵ0
4πϵ0 |⃗r − ω
⃗ (tr )|
|⃗r − r⃗′ |
:;
<
9
(4.7.1)
̸=q!
Zur Berechnung des Integrals betrachten wir Punktladung als ausgedehnt und nehmen Limes Ausdehnung
→ 0 am Ende. Der Einfachheit halber nehmen wir zunächst die Form eines kleinen Würfels an, der sich
auf ⃗r zubewegt:
Integrationsgebiet
63
KAPITEL 4. MAXWELLGLEICHUNGEN
Vorlesungsskript T3p Elektrodynamik
Berechne nun Integral durch Summation
*
d3 r′ ϱ(r⃗′ , tr ) ≈
N
&
(4.7.2)
ϱi ∆Vi
i=1
mit ϱi : Ladungsdichte in ∆Vi zur Zeit ti = t − rci und ri : Abstand von ⃗r zum i-ten Volumenelement
(zur retardierten Zeit ti ). Wähle ∆Vi als kleine Quader mit Seitenlängen a und Dicke d (um wirklich das
Integral (4.7.2) zu erhalten, muss man schliesslich den Limes d → 0 durchführen)
Annahme: ϱ homogen
Dann:
N
&
ϱi ∆Vi
i=1
mit
b
⇒b
=
N
&
i=1
ϱ d a2 = N ϱ d a2
= ϱ a3
= q ab
(4.7.3)
Nd
a
= a + v ∆t
@ = a + v (tN − tA1 )
= a + v t − rcN − (t − rc1 )
=a+v
= 1−a v
Damit
Φret (⃗r, t) =
r1 −rN d→0
=
c
a + vc b
c
1
1
q
4πϵ0 |⃗r − ω
⃗ (tr )| [1 − v(tr ) ]
c
64
(4.7.4)
(4.7.5)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 4. MAXWELLGLEICHUNGEN
Beachte:
(i) a fällt aus Endergebnis heraus! Bleibt im Limes a → 0 gültig.
(ii) Ergebnis unabhängig von Würfelform.
(iii) Bei beliebiger Geschwindigkeit
Φret (⃗r, t) =
6
q
1
4πϵ0 |⃗r − ω
⃗ (tr )| 1 −
1
⃗
v (tr )
c
·
⃗
r −⃗
ω (tr )
|⃗
r −⃗
ω (tr )|
7
(4.7.6)
⃗ (⃗j = ϱ⃗v und ϱ-Integral wie oben)
(iv) Analog ist für A
6
1
⃗ ret (⃗r, t) = µ0 q
A
4π |⃗r − ω
⃗ (tr )| [1 −
⃗v (tr )
⃗
v (tr )
c
·
⃗
r −⃗
ω (tr )
|⃗
r −⃗
ω (tr )|
7
(4.7.7)
Liénard-Wiechert-Potentiale
(v) Zusatzfaktor hat nichts mit Lorentz-Kontraktion zu tun, a ist Länge des bewegten Würfels, die
Ruhelänge spielt keine Rolle in der Herleitung
⃗ = −∇Φ
⃗ ret − A
⃗ ret und B
⃗ =∇
⃗ ×A
⃗ ret erhält man (10.3.2 im Griffiths):
Durch Einsetzen in E
⃗ r, t) =
E(⃗
G 2
H
q
|⃗r − ω
⃗|
(c − v 2 )⃗u + (⃗r − ω
⃗ ) × (⃗u × ⃗a)
3
4πϵ0 ((⃗r − ω
⃗ ) · ⃗u)
(4.7.8)
⃗
⃗ r, t)
⃗ r, t) = 1 ⃗r − ω
B(⃗
× E(⃗
c |⃗r − ω
⃗|
(4.7.9)
⃗ +QV
⃗ ×B
⃗
F⃗ = Q E
(4.7.10)
−⃗
ω
wobei ω
⃗ , ⃗v = ω
⃗˙ , ⃗a = ⃗v˙ , ⃗u = c |⃗⃗rr−⃗
v alle zum retardierten Zeitpunkt tr genommen werden müssen.
ω| − ⃗
⃗:
Kraft auf andere Punktladung Q mit Geschwindigkeit V
Bemerkung:
(i) Der beschleunigungsabhängige Term fällt wie
1
|⃗
r −⃗
ω|
ab ⇒ Strahlungsfeld.
⃗ ⊥E
⃗
(ii) B
65
KAPITEL 5.
Spezielle Relativiätstheorie
Erinnerung: Galilei-Transformation
x′ = x − vt, y ′ = y, z ′ = z, t′ = t
(5.0.1)
D.h. es gibt absolute Zeit und Geschwindigkeiten addieren sich einfach, z.B. Lichtgeschwindigkeit in IS ′
(für Lichtstrahl, der sich in die selbe Richtung bewegt wie IS ′ ): c′ = c − v
Aber: Michelson-Morley-Experiment: Lichtgeschwindigkeit ist unabhängig vom Bezugssystem.
Dies hat Einstein 1905 zum Postulat über die Universalität der Lichtgeschwindigkeit erhoben und führt
auf die Lorentztransformationen als korrekte Transformationen zwischen IS und IS ′ .
Zunächst:
(i) Transformation muss linear sein, da geradlinige gleichförmige Bewegung in IS in eine ebensolche
Bewegung in IS ′ transformiert werden muss.
(ii) Abwesenheit von Transversaleffekten
(iii) Wähle Ursprung der Koordinatensysteme so, dass sie zum Zeitpunkt t = t′ = 0 zusammenfallen.
67
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
Dann:
x′
y′
z′
t′
= a11 x + a12 t
=y
=z
= a21 x : a22 t
(5.0.2)
Hier geht noch die vereinfachende Annahme ein, dass x′ und t′ nicht von y und z abhängen.
Der Koordinatenursprung von IS ′ (x′ = 0) bewegt sich in IS mit Geschwindigkeit v.
⇒ 0 = a11 x(t) + a12 t = a11 vt + a12 t
⇒ a12 = −a11 v
(5.0.3)
⇒ x′ = a11 (x − vt)
(5.0.4)
⇒ x = a11 (x′ + vt′ )
(5.0.5)
Beide Bezugssysteme sind gleichberechtigt (IS bewegt sich relativ zu IS ′ mit −v).
Gleichung (5.0.4) gilt auch für Galilei-Transformation.
Jetzt: Betrachte Lichtstrahl, der zum Zeitpunkt t = t′ = 0 im gemeinsamen Ursprung in x− bzw.
x′ −Richtung ausgesandt wird.
Die Lichtgeschwindigkeit ist unabhängig vom Bezugssystem ⇒ Für Wellenfront in x−Richtung gilt:
x
=c
t
Einsetzen in (5.0.4) und (5.0.5):
multipliziere (5.0.7)
mit (5.0.8) und
teile durch xx′
Damit:
' 1
2
1− vc2
(5.0.8)
1
a11 = P
1−
pos. Wurzel, da GalileiTransformation als Grenzfall
für v → 0 herauskommen sollen
= v1 ( ax11 − x′ ) = v1 (
=
(5.0.7)
9⇐⇒
:; <
≈
9:;<
v<<c
t − v2 x
t′ = P c
2
1 − vc2
Herleitung:
t′
v2
)
c2
x − vt
x′ = P
2
1 − vc2
Außerdem folgt aus (5.0.5)
(5.0.6)
v
x′ = a11 x(1 − )
c
v
x = a11 x′ (1 + )
c
1 = a211 (1 −
⇒
9:;<
x′
=c
t′
und
v2
c2
(5.0.9)
x − vt
(5.0.10)
t
(5.0.11)
≈
9:;<
v<<c
P
1−
(t + xv (1 −
v2
c2
v2
c2 x
−
− 1)) =
'x−vt
2
1− vc2
' 1
2
1− vc2
)
(t −
v
c2 x)
(5.0.12)
Durch Vertauschen der Rollen von IS und IS ′ erhält man:
x′ + vt′
x= P
,
2
1 − vc2
68
t′ + v2 x′
t= P c
2
1 − vc2
(5.0.13)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
Konsequenzen der Lorentztransformation
(i) v < c
(ii) Zeitdilatation
t′ = 0
t′ = ∆t′
Umrechnen der Ereignisse (t′ = 0, x′ = 0) und (t′ = ∆t′ , x′ = 0) in Koordinaten in IS:
(t′ = 0, x′ = 0): t = 0 und x = 0
(t′ = ∆t′ , x′ = 0):
∆t′
t= P
, x = vt
2
1 − vc2
⇒ ∆t = P
∆t′
1−
v2
c2
“Bewegte Uhren
gehen langsamer”
(5.0.14)
(5.0.15)
∆t′ : Eigenzeit der Uhr, d.h. Zeit, die im Ruhsystem der Uhr vergeht
Anschaulich: Lichtuhr, die in IS ′ ruht.
Aus Sicht von IS ′ :
Aus Sicht von IS:
69
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
(iii) Längenkontraktion (auch Lorentz-Kontraktion genannt)
L′ : Eigenlänge des Stabes, d.h. Länge im Ruhsystem des Stabes
In IS: linkes Stabende
x=v·t
rechtes Stabende
x − vt
⇔ x = vt + L′
L =P
2
1 − vc2
′
Q
1−
(5.0.16)
v2
c2
L = (rechtes Stabende zur Zeit t) − (linkes Stabende zur Zeit t)
Q
v2
“Bewegte Maßstäbe sind in
′
⇒ L=L
1− 2
Bewegungsrichtung
verkürzt”
c
(5.0.17)
(5.0.18)
(5.0.19)
(iv) Geschwindigkeitsaddition
P
2
′
1 − vc2
dx
dx
−
v
dt
′
u = ′ = P
v
2
dt
1 − vc2 dt − c2 dx
⇒ u′ =
u−v
1 − vc2u
u = c ⇒ u′ =
c−v
=c
1 − vc
⇒ Unabhängigkeit der Lichtgeschwindigkeit vom Bezugssystem
70
(5.0.20)
(5.0.21)
(5.0.22)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
(v) Relativität der Gleichzeitigkeit: Ereignisse, die in IS ′ gleichzeitig, z.B. zur Zeit t′ = 0, stattfinden,
finden in IS zu verschiedenen Zeiten t = cv2 x statt.
Grafische Darstellung
Beachte Analogie zur räumlichen Drehung.
Zwillingsparadoxon:
Zeit zwischen A und B: Für Alice: T; für Bob: ?
Zeitdilatation:
Eigenzeitintervall
auf Bob’s Uhr
Zeitintervall aus
Alice’ Sicht
;<9:
dt
=
;<9:
dτ
P
2
1 − vc2
(5.0.23)
Beachte: dτ ist Zeitintervall in Bob’s momentanem Ruhsystem. Dieses ändert sich entlang Bob’s Trajektorie.
P
2
⇒ dτ = dt 1 − vc2
*T Q
(5.0.24)
ẋ(t)2
<T
⇒ τ
= dt 1 − 2
c
0
Bemerkung: Die Situation ist nicht symmetrisch zwischen Alice und Bob. Alice ist immer in ein und
demselben Inertialsystem in Ruhe während sich das Inertialsystem, in dem sich Bob momentan in Ruhe
befindet und somit die zugehörige Zeitkoordinate im Laufe der Reise ändert.
Folgerung: Zwischen zwei Ereignissen A und B, die so zueinander liegen, dass es für einen Körper möglich
ist, in A zu starten und in B anzukommen, ohne sich je mit c oder schneller bewegen zu müssen, ist die
freie (d.h. gleichförmige) Bewegung genau jene, für die die Eigenzeit am größten ist.
Beweis: Betrachte Situation vom Ruhsystem des Körpers aus ⇒ wie Zwillingsparadoxon.
71
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
Erinnerung: Wirkungsintegral ist für Lösungen der Newton’schen Bewegungsgleichungen extremal.
E
*t1
⃗x˙ (t)2
⇒ dt 1 − 2
(5.0.25)
c
t0
Kandidat für Wirkung einer kräftefreien Bewegung.
Aber:
E
⃗x˙ 2
⃗x˙ 2
1− 2 ≈1−
c
2c2
9:;<
⎛J
⃗x˙ 2
+O ⎝ 2
c
K2 ⎞
bis auf Vorzeichen
und Vorfaktor nichtrelativistische kinetische Energie
Daher:
L(⃗x˙ ) = −mc2
⇒ pj =
Energie über:
⇒ p⃗ = P
∂L
∂ ẋj
P
1−
=
m⃗v
E=
(5.0.26)
⃗
x˙ 2
c2
m ẋj
'
˙2
x
1− ⃗
c2
(5.0.27)
relativistischer
Impuls
v2
c2
1−
⎠
= ⃗x˙ · p⃗ − L
H
9:;<
(5.0.28)
Hamiltonfunktion
⇒E
= ··· =
≈ 9:;<
mc2
2
'mc
2
1− vc2
4 ˙ 65
m ˙ 2 3 m|⃗x˙ |4
⃗x + 8 c2 + O |⃗xc4|
92:; <
+
(5.0.29)
Ruheenergie nichtrelativistische
kinetische Energie
Bezeichnung:
T ≡ E − mc2
ist relativistische kinetische Energie
mrel = P
m
1−
relativistische
Masse
v2
c2
(5.0.30)
(5.0.31)
(im Gegensatz zur Ruhemasse m)
Damit:
E = mrel c2
p⃗ = mrel⃗v ,
(5.0.32)
Man verifiziert leicht durch Einsetzen:
E 2 = p⃗2 c2 + m2 c4
relativistische EnergieImpuls-Beziehung
(5.0.33)
Kopplung an elektromagnetische Felder
(vgl. Aufg. 2, Blatt 22)
L(⃗x, ⃗x˙ , t) = −mc2
˙
P
1−
⃗
x˙ 2
c2
⃗ x, t)
− qΦ(⃗x, t) + q⃗x˙ · A(⃗
x
d ' m⃗
⃗ x, t) + ⃗x˙ × B(⃗
⃗ x, t))
= q(E(⃗
⇒ dt
˙2
9:;<
x
1− ⃗
2
EulerLagrangeGleichung
72
c
(5.0.34)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
Vierervektoren
Größen, die beim Übergang zwischen Intertialsystemen genauso transformieren wie (c t, x, y, z), d.h aµ ≡
(at , ax , ay , az ) Vierervektor
a −v a
⇒ a′t = 't c v2x
1− c2
ax − vc at
'
2
1− vc2
(5.0.35)
a′x
=
a′y
= ay , a′z = az
Dann:
−(a′t )2 + (a′x )2 + (a′y )2 + (a′z )2
=
−(at − vc ax )2 +(ax − vc at )2
=
−a2t +2 vc at ax − vc2 a2x +a2x −2 vc ax at + vc2 a2t
2
1− vc2
+ a2y + a2z
2
=
2
2
1− vc2
2
2
−(1− vc2 )a2t +(1− vc2 )a2x
2
1− vc2
+ a2y + a2z
(5.0.36)
+ a2y + a2z
= −a2t + a2x + a2y + a2z
Allgemeiner gilt: Lorentztransformationen lassen “Skalarprodukte” invariant, also
−a′t b′t + a′x b′x + a′y b′y + a′z b′z
= −at bt + ax bx + ay by + az bz
d.h.
− at bt + ⃗a · ⃗b
ist invariant.
Beachte Analogie zu räumlichen Drehungen, die Skalarprodukte ⃗a · ⃗b invariant lassen.
Beispiele für Vierervektoren:
>
=
E
pµ =
, px , py , pz
Viererimpuls
c
>
=
∂
∂ ∂ ∂
,
,
,
Vierergradient
∇µ = −
c ∂t ∂x ∂y ∂z
(5.0.37)
(5.0.38)
(5.0.39)
(5.0.40)
(vergleiche 17.4 bzw. 25.3 in Feynman-Vorlesungen Band 2)
Zurück zur Frage am Ende von Kapitel 3. IS:
in IS:
da Draht elektrisch neutral
(5.0.41)
⃗
F⃗ = q v⃗0 × B
(5.0.42)
µ0 I|q|v0
1 I|q|v0
=
⇒ F = |F⃗ | =
2π r
2πϵ0 c2 r
(5.0.43)
ϱ+ = ϱ−
73
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
I = |ϱ− |vA
⇒
9:;<
F =
Annahme:
v0 = v
1 |qϱ− |A v 2
2πϵ0
r
c2
(5.0.44)
In IS ′ : q in Ruhe ⇒ Kraft auf q muss elektrisch sein!
Zunächst: Die Ladung eines einzelnen Teilchens (z.B. eines Elektrons) ist unabhängig von dessen Geschwindigkeit (anders als Masse). Sonst würde sich ein Block Materie beim Erhitzen aufladen (da Elektronen leichter als Protonen sind, d.h. Elektronen sind nach Erwärmen schneller).
Aber: Ladungsdichten sind wegen Lorentz-Kontraktion vom Bezugssystem abhängig.
!
Q = ϱ0 L0 A0 = ϱ L A0 = ϱ L0
⇒ϱ=
' ϱ0
2
1− vc2
P
1−
v2
c2
A0
(5.0.45)
D.h. Ladungsdichte ändert sich in derselben Weise wie Masse.
Anwendung auf unsere Fragestellung:
positive Ladungen in IS in Ruhe
ϱ+
⇒ ϱ′+ = P
2
1 − vc2
negative Ladungen in IS ′ in Ruhe:
Anschaulich:
ϱ′
ϱ− = P −
1−
(5.0.46)
(5.0.47)
v2
c2
IS :
ϱ+ :
ϱ− :
× × × × × ×
· · · · · ·
IS ′ :
ϱ′+ :
ϱ′− :
×××××××××××
·
·
·
·
⇒ Gesamtladungsdichte in IS ′ :
ϱ′
= ϱ′+ + ϱ′− =
v2
'
ϱ+
2
1− vc2
+ ϱ−
= ϱ+ ' c 2 v 2
9:;<
1− 2
ϱ− =−ϱ+
P
1−
v2
c2
(5.0.48)
c
D.h. das bewegte Drahstück ist positiv geladen und erzeugt ein elektrisches Feld (vgl. Aufgabe 2(a), Blatt
3):
2
ϱ+ A vc2
ϱ′ A
P
E =
=
2πϵ0 r
2πϵ0 r 1 −
′
74
v2
c2
(5.0.49)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
⇒ Kraft auf q in IS ′ :
2
v
|q| ϱ+ A
2
P c
F =
2πϵ0 r
1−
′
D.h.
F
F′ = P
1−
(5.0.50)
v2
c2
(5.0.51)
v2
c2
Aber: Für die Impulsänderung der Ladung q gilt:
IS :
IS ′ :
∆py
∆p′y
!
∆py = ∆p′y
= F ∆t
= F ′ ∆t′
(5.0.52)
(da pµ Vierervektor)
⇒ F ∆t = F ′ ∆t′
∆t
=
⇒ F ′ = F ∆t
′
9:;<
∆t =
′
( ∆t
2
1− v2
c
(5.0.53)
' F
2
1− vc2
(5.0.54)
da Teilchen zu
Beginn in IS ′ ruht
D.h.: Elektrische und magnetische Kräfte sind Teile eines physikalischen Phänomens, der elektromagnetischen Wechselwirkung. Die Aufteilung dieser Wechselwirkung in elektrische und magnetische Anteile
hängt vom Bezugssystem ab.
Falls ϱ0 Ladungsdichte im Ruhsystem ist, dann gilt im System, in dem die Ladung Geschwindigkeit v
hat:
ϱ0
⃗j = ϱ⃗v = P ϱ0⃗v
ϱ= P
,
(5.0.55)
2
2
1 − vc2
1 − vc2
Vergleich mit
⎞
⎛
mc
E
m⃗
v
⎠
,P
pµ = ( , p⃗) = ⎝ P
2
2
c
1− v
1− v
c2
zeigt, dass
jµ ≡ (ϱc, ⃗j)
Vierervektor ist, die Viererstromdichte.
Maxwellgleichungen:
∆Φ −
1 ∂2Φ
c2 ∂t2
=
= − ϵϱ0
⃗
"A
= −µ0⃗j
Definiere
Aµ =
" Aµ
9:;<
⃗ ·∇
⃗
−∇t ∇t + ∇
Skalar, d.h.
invariant
unter Lorentztransformation
(5.0.57)
"Φ
zusammen
(5.0.58) ⇒
(5.0.56)
c2
=
⃗ ·A
⃗+
mit ∇
Φ ⃗
,A
c
= −µ0 jµ
9:;<
>
Vierervektor
1 ∂Φ
c2 ∂t
=0
⎫
⎪
⎪
⎪
⎬
(5.0.58)
⎪
⎪
⎪
⎭
(5.0.59)
⃗ ·A
⃗=0
mit − ∇t At + ∇
(5.0.60)
D.h. Aµ ist ebenfalls Vierervektor und Maxwellgleichungen sind forminvariant unter Lorentztransformationen.
75
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
⃗ B
⃗ fest. Resultat (s. z.B. 26.3 in Feynman):
Transformation von Aµ legt Transformation von E,
⃗ ′∥ = E
⃗ ∥,
E
⃗ ′⊥ =
E
⃗ ′∥ = B
⃗∥
B
⃗ v ×B)
⃗ ⊥
(E+⃗
'
,
v2
1− c2
⃗
⃗ ′⊥ =
B
v ×E
⃗ ⃗
)⊥
(B−
' c2
v2
1− c2
(5.0.61)
z.B. elektrisches Feld einer Punktladung:
Verstärkung transversal zu ⃗v ; Abschwächung parallel zu ⃗v . Genauer (s. Bsp. 10.4 in Griffiths):
2
⃗ r, t) =
E(⃗
1 − vc2
q
⃗r − ⃗v t
3
2
2
v
4πϵ0 (1 − c2 sin θ ) 2 |⃗r − ⃗v t|3
9:;<
(5.0.62)
Winkel zwischen
⃗
r−⃗
v t und ⃗
v
⃗ zeigt in Richtung von der aktuellen Position des Teilchens zum Beobachtungspunkt ⃗r.
Bemerkung: E
Dies ist speziell für gleichförmige (d.h. unbeschleunigte) Bewegung.
θ=0
⇒
E=
q
v2
1
(1 − 2 )
4πϵ0
c |⃗r − w|
⃗2
9
:;
<
1
⃗′ |2
|r⃗′ −w
76
(5.0.63)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 5. SPEZIELLE RELATIVIÄTSTHEORIE
|⃗r − w|
⃗ =
|r⃗′
−
⃗′|
w
Q
1−
v2
c2
77
KAPITEL 6.
Elektrodynamik in Materie
6.1. Elektrische Felder in Dielektrika (Nichtleiter)
Quelle für elektrisches Feld: elektrische Dipolmomente
(a) Verschiebung von Ladungen im äußeren Feld:
(b) Ausrichtung vorhandener Dipole (z.B. Wasser)
P⃗ ≡ Dipolmoment pro Volumen, Polarisation
⇒
9:;<
Φ(⃗r)
=
1
4πϵ0
einzelner
Punktdipol
Φ(⃗
r) =
1
4πϵ0
p
⃗0
*
V
(⃗r − r⃗′ )
d3 r′ P⃗ (r⃗′ ) ·
|⃗r − r⃗′ |3
9 ) :; <*
⃗′
∇
⃗
r −r⃗′
|⃗
r −r⃗′ |3
=
9:;<
partielle
Integration
1
− 4πϵ
0
*
V
d3 r ′
1
|⃗
r −r⃗′ |
⃗ ′ · P⃗ (r⃗′ )
∇
1
+
4πϵ0
|⃗r − r⃗′ |
(6.1.1)
*
∂V
da⃗′ ·
P⃗ (r⃗′ )
|⃗r − r⃗′ |
⃗ · P⃗ und einer Flächenladungsdichte σpol = P⃗ · ⃗n
Potential einer Volumen-Ladungsdichte ϱpol ≡ −∇
mit ⃗n: nach außen gerichteter Normalenvektor von ∂V .
Anschaulich:
79
KAPITEL 6. ELEKTRODYNAMIK IN MATERIE
Ladung in V:
*
d3 rϱpol = QV = −
V
Vorlesungsskript T3p Elektrodynamik
*
*
d⃗a · P⃗ = −
Einwände:
(6.1.2)
V
∂V
V beliebig ⇒
⃗ · P⃗
d3 r ∇
⃗ · P⃗
ϱpol = −∇
(i) Dipolnäherung nur gut weit weg von Ladungen
(ii) Mikroskopisches elektrisches Feld extrem inhomogen
⃗ bei ⃗r: Mittelung
Lösung: Φ ist das makroskopische (gemittelte) Potential. Makroskopisches Feld E
über Kugel KR von Radius R. R muß groß genug sein, daß uninteressante mikroskopische Fluktuationen weg gemittelt werden, aber klein genug, dass keine großräumige Struktur des Feldes verwischt
wird. Typischerweise wählt man R so, daß KR einige 1000 Atome enthält.
Beweis: siehe Griffiths Kapitel 4.2.3
Zeitabhängige Polarisation
⇒ ⃗jpol =
∂ P⃗
∂t
Konsistent mit Kontinuitätsgleichung für ϱpol :
∂
⃗ · ⃗jpol = 0
ϱpol +∇
∂t 9:;<
(6.1.3)
⃗ P
⃗
−∇·
6.2. Magnetfelder in magnetisierter Materie
⃗ = magnetisches Dipolmoment pro Volumen, Magnetisierung
M
z.B. durch Ausrichtung von Elementarmagneten im äußeren Magnetfeld (Paramagnetismus).
⃗ r)
A(⃗
=
µ0
4π
*
⃗ (r⃗′ ) ×
d3 r ′ M
V
⃗r − r⃗′
|⃗r − r⃗′ |3
9 :; <
⃗′
∇
=
9:;<
partielle
Integration
µ0
4π
*
V
9
d3 r ′
1
|⃗
r −r⃗′ |
⃗′ × M
⃗ (r⃗′ )
∇
|⃗r − r⃗′ |
:;
<
Vektorpotential einer
Volumenstromdichte
⃗ ×M
⃗
⃗jmag = ∇
+
µ0
4π
*
⃗ (r⃗′ ) × da⃗′
M
|⃗r − r⃗′ |
∂V
9
:;
<
Vektorpotential einer
Flächenstromdichte
⃗
⃗ ×⃗
kmag = M
n
⃗ r) beschreibt gemitteltes makroskopisches Magnetfeld
Analog zu 6.1: A(⃗
80
(6.2.1)
Vorlesungsskript T3p Elektrodynamik
KAPITEL 6. ELEKTRODYNAMIK IN MATERIE
6.3. Maxwellgleichungen für makroskopische Felder in Materie
Im Inneren der Materie gilt:
⃗ ·B
⃗ =0
∇
⃗ ×E
⃗+
∇
⃗ ·E
⃗ =
∇
1
ϵ0 ϱ
⃗ ×B
⃗−
∇
Definiere
Damit:
⃗
∂B
∂t
=0
=
1
frei +ϱpol )
ϵ0 (ϱ
9:;<
=
ϱfrei
ϵ0
”freie Ladungen
(z.B. Leitungselektronen,
Ionen)
µ0 ϵ0 ∂E
=
µ0⃗j = µ0 (⃗jfrei
∂t
1 ⃗
ϵ0 ∇
−
· P⃗
(6.3.1)
⃗
⃗ ×M
⃗
+ ⃗jpol + ⃗jmag ) = µ0⃗jfrei + µ0 ∂∂tP + µ0 ∇
⃗ = ϵ0 E
⃗ + P⃗
D
Dielektrische Verschiebung
⃗ =
H
H-Feld
1 ⃗
µ0 B
⃗
−M
⃗ ·B
⃗
∇
⃗ ×E
⃗+
∇
⃗
∂B
∂t
⃗ ·D
⃗
∇
⃗ ×H
⃗ −
∇
⃗
∂D
∂t
=
0
=
0
=
ϱfrei
(6.3.2)
(6.3.3)
= ⃗jfrei
Beachte:
(i) In Statik
⃗ ·D
⃗ = ϱfrei
∇
⃗ ×E
⃗ =0
∇
Aber:
⃗ ̸= 1
D
4π
denn
ebenso für
denn
aber
*
d3 r′ ϱfrei
⃗r − r⃗′
|⃗r − r⃗′ |3
i.A.
(6.3.4)
(6.3.5)
⃗ ×D
⃗ =∇
⃗ × P⃗ ̸= 0
∇
(6.3.6)
⃗ ×H
⃗ = ⃗jfrei
∇
(6.3.7)
⃗ ·H
⃗ = −∇
⃗ ·M
⃗ ̸= 0
∇
(6.3.8)
*
⃗ = Qfrei
d⃗a · D
Gauß
(6.3.9)
∂V
gilt.
81
KAPITEL 6. ELEKTRODYNAMIK IN MATERIE
Vorlesungsskript T3p Elektrodynamik
⃗ , falls E
⃗ = 0 = B.
⃗
(ii) Häufig P⃗ = 0 = M
⃗ B:
⃗
Für kleine E,
⎫
⃗ ⎬
P⃗ = ϵ0 χe E
4
⃗ = χm H
⃗ ⎭
M
(6.3.10)
Lineare Antwort
⃗ = µ0 ( H
⃗ +M
⃗ ) = µ0 (1 + χm )H
⃗
⇒B
5
⃗ und B
⃗ zeitlich
χe , χm : elektrische und magnetische Suszeptibilität (i.A. frequenzabhängig, wenn E
periodisch)
Damit:
⃗ = ϵE
⃗
D
⃗ = µH
⃗
B
und
mit ϵ = ϵ0 (1 + χe )
Dielektrizität
mit µ = µ0 (1 + χm )
Permeabilität
⃗ ·E
⃗
∇
=
ϱfrei
ϵ
⃗ ×E
⃗
∇
=
⃗ ·B
⃗
∇
− ∂∂tB
=
0
⃗ ×B
⃗
∇
=
⃗
µ⃗jfrei + ϵµ ∂∂tE
(6.3.11)
(6.3.12)
⃗
(6.3.13)
(iii) Randbedingungen analog zu metallischen Rändern, z.B.
⃗n
⃗t
D1⊥ − D2⊥
=
σfrei ,
E1 − E2
=
0,
∥
∥
⃗ · ⃗n und E ∥ = E
⃗ · ⃗t.
wobei D⊥ = D
(iv) Elektrostatische Energie in Materie
W =
1
2
*
⃗ ·E
⃗
d3 r D
R3
(enthält Beitrag von Polarisationsladungen und Energie, die zur Polarisation nötig ist).
82
(6.3.14)
ANHANG A.
Appendix: Herleitung des magnetischen
Dipolmoments
83