¨Ubung 5.1: Aufgaben zu Kapitel 5, zeitkontinuierliche LTI
Werbung

ZHAW, School of Engineering, SG AV
ETEK2, Übung 5.1
Übung 5.1: Aufgaben zu Kapitel 5, zeitkontinuierliche
LTI-Systeme
© M. Schlup, 19. Februar 2015
Aufgabe 1
Hochpass mit RC-Glied
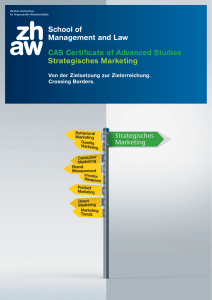
Gegeben sei das RC-Glied gemäss der Abbildung 1. Die Schaltung werde durch die Eingangs- oder
Abbildung 1: RC-Glied
Störfunktion u1 (t) = U1 (t) angeregt. Die Antwort eines LTI-Systems auf die heaviside’sche Funktion
(t) wird Schrittantwort genannt. Der Kondensator sei anfänglich ungeladen.
a) Bestimmen Sie qualitativ den Verlauf der Spannung uR (t) für die folgenden Fälle:
(1) Anfangsbedingung: Welchen Wert nimmt uR (0) an?
Hinweis: Die Spannung über (ideale) Kondensatoren kann keine Sprünge machen, d. h. sie
verläuft kontinuierlich.
(2) Endwert: Welchen Wert nimmt uR (∞) an?
(3) Anfangssteilheit: Mit welcher Steilheit dudtR verläuft uR (t) unmittelbar nach dem Sprung der
Eingangsspannung?
Hinweis: Die Eingangsspannung u1 (t) bleibt für t ≥ 0 konstant.
(4) Der Verlauf von uR (t) für die Anfangsbedingung u2 (0) = 0 lautet:
t
uR (t) = uR (0)e− τ (t)
Bestimmen Sie die Parameter uR (0) und τ der Sprungantwort durch Vergleich mit den vorangehenden Ergebnissen.
b) Leiten Sie die Differentialgleichung mit uR (t) als unbekannte Ausgangsfunktion y(t) und u1 (t) als
Eingangs- oder Störfunktion x(t) her. Die Differentialgleichung sollte in der folgenden normierten
Form angegeben werden:
duR
τ
+ uR = · · ·
dt
Erfüllt die Sprungantwort diese Differentialgleichung und die Anfangsbedingung?
c) Transformieren Sie die Differentialgleichung mit der Fourier-Transformation und bilden Sie die
Frequenzgangfunktion des Verhältnisses H( f ) = UUR1 (( ff )) .
d) Bestimmen Sie das Bodediagramm (Amplitudengeng und Phasengang) der Frequenzgangfunktion
H( f ).
1
ZHAW, School of Engineering, SG AV
ETEK2, Übung 5.1
e) Bestimmen Sie die Stossantwort h(t) durch bilden der zeitlichen Ableitung der Schrittantwort.
Zeigen Sie das die Frequenzgangfunktion H( f ) der Fourier-Transformation der Stossantwort entspricht.
Hinweis: Kettenregel und Linearitätseigenschaft der Fourier-Transformation (Tabelle) benutzen.
f) Das RC-Glied wird mit dem harmonischen Signal u1 (t) = Û1 cos(2π f t + ϕ1 ) angeregt. Bestimmen
Sie die Amplitude und die Phase des stationären Signals uR (t) = ÛR cos(2π f t + ϕR ) für die Werte
1
und ϕ1 = 0.
Û1 = 2 V, f = fg = 2πRC
Aufgabe 2
Parallelschwingkreis
Gegeben seien je ein R-, L- und C-Element, welche parallel geschaltet sind. Betrachtet werden die gemeinsame Spannung u(t) der Elemente und die gesamte Stromstärke i(t) durch die Anordnung.
a) Leiten Sie die Differentialgleichung mit u(t) als unbekannte Ausgangsfunktion y(t) und i(t) als
Eingangs- oder Störfunktion x(t) her. Die Differentialgleichung sollte in der folgenden normierten
Form angegeben werden:
1 d2 u
1 du
+ u = ···
+
2
2
ωr Q dt
ωr dt
Bestimmen Sie die Parameter ωr und Q in Funktion der Grössen R, L und C durch Koeffizientenvergleich der normierten Form mit der Differentialgleichung.
b) Transformieren Sie die Differentialgleichung mit der Fourier-Transformation und bilden Sie die
f)
Frequenzgangfunktion des Verhältnisses Z( f ) = U(
I( f ) . Damit dieses Verhältnis einheitsfrei wird,
kann es mit R wie folgt normiert werden1 : H( f ) =
Z( f )
R
=
1 U( f )
R I( f )
c) Bestimmen Sie das Bodediagramm (Amplitudengeng und Phasengang) der Frequenzgangfunktion
H( f ).
1
Diese Normierung ist willkürlich aber zweckmässig. Man könnte ebenso gut mit 1 Ω normieren.
2
ZHAW, School of Engineering, SG AV
A
ETEK2, Übung 5.1
Bestimmung des Frequenzgangs eines LTI-Systems mit Matlab
Die Bestimmung des Frequenzgangs (Amplituden- und Phasengang) eines kontinuierlichen LTI-Systems
soll an Hand eines Beispiels mit der Eingangsfunktion x(t) und der Ausgangsfunktion y(t) illustriert werden. Die Differentialgleichung dieses LTI-Systems 2. Ordnung soll z. B. wie folgt lauten:
a0 y + a1 ẏ + a2 ÿ = b1 ẋ
Bei harmonischer Anregung und im eingeschwungenen Zustand kann das System durch die komplexe
Frequenzgangfunktion dargestellt werden. Diese kann direkt aus der Differentialgleichung ermittelt werden: Die Ableitung nach der Zeit entspricht dabei einer Multiplikation mit iω im Zeitbereich.
F(iω) =
Y(iω)
b1 iω
=
X(iω) a0 + a1 iω + a2 (iω)2
Die normierte Darstellung dieses Systems mit den Parametern Verstärkungsfaktor k, Polkreisfrequenz ω0
und Gütefaktor Q lautet:
i ωω0 Q1
F(iω) = k
2
1 + i ωω0 Q1 + i ωω0
Der Zusammenhang zwischen den Parametern dieser Darstellungen kann durch Koeffizientenvergleich
ermittelt werden.
3
ZHAW, School of Engineering, SG AV
ETEK2, Übung 5.1
Listing 1: Matlab-Code zur Simulation eines kontinuierlichen LTI-Systems
% ETEK2, Uebung 5.1
%
% © 2008, M. Schlup
clc, clear all
% Definition der Systemparameter
f0=1e3; % Polfrequenz in Hz
w0=2*pi*f0; % Polkreisfrequenz in sˆ-1
Q=10; % Guetefaktor
% Berechnung der Polynomkoeffizienten
k=1;
b0=0;
b1=k*w0/Q;
a0=w0ˆ2;
a1=w0/Q;
a2=1; % Nenner-Koeffizient mit der hoechsten Potenz in iw sollte auf 1 normiert sein
% 1. Variante: Bodediagramm (Benutzung der spezifischen Matlab-Funktionen)
num=[b1 b0]/a2; % Zaehlerpol., Koeffizienten in abnehmender Reihenfolge der Potenzen
den=[a2 a1 a0]/a2; % Nennerpolynom
sys=tf(num,den); % Systemdefinition mit Frequenzgangfunktion (tf: Transferfunktion)
figure(1)
bode(sys)
% 2. Variante: Bodediagramm (ausprogrammiert)
% Wahl des Frequenzbereichs (logarithmische Abstaende)
f=logspace(log10(0.1*f0),log10(10*f0),1024);
w=2*pi*f;
iw=i*w;
% Frequenzgangfunktion (direkt ausprogrammiert mit Hornerschema)
F=(b1*iw + b0)./((a2*iw + a1).*iw + a0);
Fa=abs(F); % Amplitude (Betrag)
Fp=angle(F)*180/pi; % Phase (Argument) in Grad
% Bodediagramm (logarithmische Massstaebe)
figure(2)
subplot(2,1,1)
loglog(f,Fa)
title('Frequenzgang')
ylabel('Amplitudengang')
grid
subplot(2,1,2)
semilogx(f,Fp)
xlabel('\rightarrow
Frequenz in Hz')
ylabel('\rightarrow
Phasenengang in Grad')
grid
% 3. Variante: Mit der GUI-Funktion "ltiview" koennen verschiedene Analysen von
% LTI-Systemen durchgefuehrt werden: Frequenzgang, Nyquistdiagramm, Schritt% und Stossantwort, usw.. Aufruf mit:
ltiview
4