Repetitorium lineare Algebra
Werbung

Repetitorium lineare Algebra
Stephan Lukits
18. Juli 2006
Zusammenfassung
Dies ist eine Zusammenfassung der Vorlesung zur linearen Algebra, die von Herrn Prof. Petterson et al verfasst wurde. Alle
hier enthaltenen Fehler gehen natürlich allein zu meinen Lasten.
Inhaltlich wird nach einigen Vorbereitugen zunächst auf die algebraischen Strukturen des Körpers, Vektorraums und Untervektorraumes eingegangen, dann wird der Matrizenkalkül entwickelt und
gezeigt, dass sich lineare Abbildungen mit Matrizen identifizieren
lassen. Nachdem die theoretischen Grundlagen gelegt sind, werden
zwei Anwendungen diskutiert, das lösen linearer Gleichungssysteme und das Eigenwertproblem.
Inhaltsverzeichnis
0 Präliminarien
0.1 Mengen . . . . . . . . . . . . . . . . . . . . .
0.2 Abbildungen . . . . . . . . . . . . . . . . . .
0.3 Zahlen . . . . . . . . . . . . . . . . . . . . . .
0.3.1 Natürliche Zahlen . . . . . . . . . . .
0.3.1.1 Definition durch Rekursion .
0.3.1.2 Vollständige Induktion . . .
0.3.2 Komplexe Zahlen . . . . . . . . . . . .
0.3.2.1 Geometrische Betrachtungen
0.4 Der Körperbegriff . . . . . . . . . . . . . . . .
0.4.1 Rechnen im Körper . . . . . . . . . .
0.4.1.1 Summenzeichen . . . . . . .
0.4.1.2 Produktzeichen . . . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
6
9
9
10
11
13
14
16
18
20
22
INHALTSVERZEICHNIS
INHALTSVERZEICHNIS
1 Vektorraumtheorie
1.1 Rechnen im Vektorraum . . . . . .
1.2 Untervektorraum . . . . . . . . . .
1.3 Erzeugendensystem . . . . . . . . .
1.4 Lineare Unabhängigkeit und Basis
1.5 Dimension eines Vektorraumes . .
1.6 Lineare Abbildungen . . . . . . . .
1.6.1 Kern und Bild . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Matrizen
2.1 Vektorraum der Matrizen . . . . . . . . . . . . . .
2.2 Rang einer Matrix . . . . . . . . . . . . . . . . . .
2.3 Elementare Matrizenumformungen . . . . . . . . .
2.4 Matrizenmultiplikation . . . . . . . . . . . . . . . .
2.4.1 General Linear Group . . . . . . . . . . . .
2.4.2 Inversbildung durch Matrizenumformungen
2.5 (2 × 2)-Matrizen . . . . . . . . . . . . . . . . . . .
2.6 lineare Abbildungen . . . . . . . . . . . . . . . . .
2.6.1 Linearformen, dualer Raum . . . . . . . . .
2.7 Determinante . . . . . . . . . . . . . . . . . . . . .
3 Lineare Gleichungssysteme
3.1 Lösungsmenge eines LGS . . . . . . . .
3.2 Lineare Abbildungen . . . . . . . . . . .
3.3 Lösbarkeitkriterien . . . . . . . . . . . .
3.3.1 Rangkriterium . . . . . . . . . .
3.3.2 Matrixkriterien . . . . . . . . . .
3.4 Lösen eines LGS . . . . . . . . . . . . .
3.4.1 Gaußsches Eliminationsverfahren
3.4.2 Gaußscher Algorithmus . . . . .
3.4.3 Cramersche Regel . . . . . . . .
4 Eigenwertproblem
4.1 Polynome . . . . . . . . . . . . . .
4.1.1 Nullstellen und Teilbarkeit
4.2 Eigenwerte . . . . . . . . . . . . .
4.3 Diagonalisierbarkeit . . . . . . . .
Index
Repetitorium
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
24
27
32
32
38
41
43
.
.
.
.
.
.
.
.
.
.
46
48
49
50
54
55
57
59
59
66
68
.
.
.
.
.
.
.
.
.
76
78
79
79
79
80
81
81
82
83
.
.
.
.
84
84
88
90
93
97
2
lineare Algebra
0 Präliminarien
0 Präliminarien
Diese Zusammenfassung entstand während der Vorbereitung zu einer
mündlichen Vordiplomprüfung in linearer Algebra. Um eine Art mathematisches Sprachtraining zu praktizieren wurden Sätze häufig ausführlich „wortsprachlich” formuliert anstatt formal und kurz.
Für den Textsatz wurden die concrete Schriften und für den Formelsatz die Eulerschrift verwendet, die auch in dem Buch Conrete Mathematics [Knu04] Verwendung finden. Wegen ihres hohen Grauwertes
sind sie gut am Bildschirm lesbar; für einen brauchbaren Ausdruck benötigt man wenigstens eine Auflösung von 600 dpi.
Über die Mitteilung von Fehlern, die in diesem Exzerpt enthalten
sind, würde ich mich freuen.
0.1 Mengen
Unter einer ,Menge‘ verstehen wir jede Zusammenfassung M von bestimmten wohlunterschieden Objekten m
unserer Anschauung oder unseres Denkens (welche ,Elemente’ von M genannt werden) zu einem Ganzen.
D1
D2
Soll Georg Cantor laut [Dei04] in seiner letzten mengentheoretischen
Arbeit 1895 zur Charakterisierung des Mengenbegriffs geschrieben haben. Diese naive Beschreibung genügt für diesen Text. Mengen definiert
man entweder durch die Aufzählung ihrer Objekte wie z.B. {A, B, C}
oder durch die Angabe einer Konstruktionsvorschrift wie z.B. {x | x ist
ein Schuh}.
Eine Zusammenfassung von geordneten Objekten1 heißt (geordnetes)
n-Tupel und wird formal mit (a1 , . . . , an ) bezeichnet. Ein n-Tupel mit
zwei Komponenten heißt Paar, mit drei Tripel, mit vier Quadrupel,
mit fünf Quintupel usw. Statt Komponente werden auch die Bezeichnungen Koordinate oder Dimension verwendet – siehe auch [Lex00,
S. 307].
2
Die Buchstaben N, Z, Q, R, C bezeichnen im Weiteren die Mengen der
natürlichen, ganzen, rationalen, reellen und komplexen Zahlen. Für diesen Abschnitt bezeichnen die Buchstaben A, B, C, D beliebige Mengen
und I eine Indexmenge.
An wichtigen Beziehungen zwischen Mengen wird die Identität (A =
B), die Teilmengen- oder auch Untermengenrelation (A ⊂ B) und
die Obermengenrelation (A ⊃ B) festgelegt.
Zwei Mengen A und B sind gleich, wenn alle Elemente von A auch
1
Es gibt also ein erstes Objekt, ein zweites, ein drittes und so weiter.
Repetitorium
3
lineare Algebra
0 Präliminarien
Mengen
Elemente von B sind und umgekehrt. Dieser Umstand wird auch als
Extensionalitätsprinzip bezeichnet.
2
D3
D4
S 1.1
S 1.2
D 5.1
D 5.2
D 5.3
D 5.4
D 5.5
S 2.1
S 2.2
S 2.3
Währen zwei n-Tupel a, b genau dann gleich sind, wenn die erste Komponente von a gleich der ersten Komponente von b ist usw, wenn also
für alle i ∈ {1, . . . , n} gilt ai = bi .
2
Enthält eine Menge A alle Elemente einer anderen Menge B, dann heißt
A Obermenge von B und B Teilmenge von A. Man spricht von einer echten Teilmenge B, wenn B wenigstens ein Element von A nicht
enthält.
2
Hieraus ergeben sich die folgenden naheliegenden Schlüsse.
A und B sind gleich genau dann, wenn A eine Teilmenge von B ist und
B eine Teilmenge von A ist.
Alle drei Relationen sind transitiv, also ArB, BrC ⇒ ArC, wobei r eine
der gerade genannten Relationen ist.
2
An Mengenoperationen wird der Durchschnitt (A∩B), die Vereinigung
(A ∪ B), die Differenz (A\B) und das kartesische Produkt (A × B)
zweier Mengen benötigt.
Die Schnittmenge zweier Mengen ist die Menge aller Objekte, die Elemente beider Mengen sind.
Die Vereinigung zweier Mengen ist die Menge aller Objekt, die Elemente einer der beiden Mengen sind.
Die Differenz zweier Mengen A und B ist die Menge aller Objekte aus
A, die nicht Element von B sind.
Ist B eine Teilmenge von A, dann heißt die Differenz von A und B das
Komplement von B (bezüglich A). Man schreibt Bc oder auch B 0 .
Das kartesische Produkt zweier Mengen A, B ist schließlich die Menge
aller Paare deren erste Komponente aus A und deren zweite Komponente aus B ist. Synonyme zum kartesischen Produkt sind direktes
Produkt, Kreuzprodukt, Mengenprodukt und Produktmenge – siehe
2
auch [Lex00, S. 307].
Grundlegende Folgerungen, die sich aus dem Zusammenspiel der gerade
eingeführten Mengenoperationen und -relationen ergeben, sind:
Die Schnittmenge zweier Mengen ist sowohl Teilmenge einer jeden dieser beiden Mengen, als auch Teilmenge der Vereinigung dieser beiden
Mengen.
Bezüglich der Vereinigung bzw. dem Durchschnitt zweier Mengen sind
die beiden Mengen umstellbar, es gilt also das Kommutativgesetz.
Es ist egal in welcher Reihenfolge man schneidet bzw. vereinigt, es gilt
Repetitorium
4
lineare Algebra
0 Präliminarien
Mengen
also das Assoziativgesetz bezüglich der Vereinigung bzw. des Durchschnitts, so dass hierbei auf Klammerung verzichtet werden kann.
S 2.4
S 2.5
S 2.6
S 2.7
S 2.8
D6
S 3.1
S 3.2
S 3.3
Auch ist es egal, ob zwei Mengen A und B zuerst geschnitten und dann
mit einer dritten Menge C vereinigt werden, oder ob zuerst A mit C
und B mit C geschnitten werden um dann die beiden Schnittmengen
zu vereinigen. Diese Aussage gilt auch, wenn man den Schnittemengenoperator durch den Vereinigungsoperator ersetzt und umgekehrt. Es
gilt also das Distributivgestz bezüglich dieser beiden Operationen.
Unter der doppelten Differenzregel versteht man die Tatsache, dass
der Schnitt zweier Mengen A und B identisch ist mit der Differenz von
A und der Differenz von A und B. (A ∩ B = A\(A\B))
Die de Morganschen Gesetze schließlich besagen, dass die Differenz
von einer Menge A und dem Schnitt zweier Mengen B und C identisch
ist mit der Vereinigung der Differenzen von A und B sowie von A und
C. Dieses Gesetz gilt auch wenn man Schnitt- und Vereinigungsoperator
vertauscht.
Ist A eine Teilmenge von C und B eine Teilmenge von D, dann ist auch
das kartesische Produkt von A und B eine Teilmenge des kartesischen
Produkts von C und D.
Der Durchschnitt zweier kartesischer Produkte A × B und C × D ist
identisch mit dem kartesischen Produkt der beiden Durchschnitte A∩C
und B ∩ D.
2
Möchte man auf beliebig vielen Mengen Aa , Ab , Ac , . . . operieren, die
Teilmengen eines festen Universums sind, ist es nützlich eine Indexmengen I zu Definieren, deren Elemente die Mengen indizieren, über
die man operieren möchte. Man schreibt dann
S
T
i∈I Ai bzw.
i∈I Ai .
(Ai )i∈I bezeichnet man als eine Familie von Mengen und gilt I = N,
spricht man auch von einer Mengenfolge.
2
Wichtig in diesem Zusammenhang ist, dass sich die de Morganschen
Gesetze und die Distributivgesetze verallgemeinern lassen
T
S
S
T
und
B\( i∈I Ai ) = i∈I (B\Ai ),
B\( i∈I Ai ) = i∈I (B\Ai )
T
T
S
S
und
B ∪ i∈I Ai = i∈I (B ∪ Ai ),
B ∩ i∈I Ai = i∈I (B ∩ Ai )
außerdem kann als Verallgemeinerung von S 2.1 festgehalten werden,
dass der Durchschnitt einer Familie sowohl Teilmenge der Vereinigung
der Familie als auch Teilmenge einer beliebigen Menge der Familie ist.
2
Repetitorium
5
lineare Algebra
0 Präliminarien
Abbildungen
0.2 Abbildungen
D7
Um Strukturen von Mengen zu beschreiben ist die Begriffsbildung der
Abbildung bzw. Funktion nützlich.
Um eine Abbildung f festlegen zu können benötigt man zwei Mengen D
und W, die Definitionsmenge und Wertemenge genannt werden, und
man benötigt eine Zuordnungsvorschrift, die jedem Element aus der
Definitionsmenge in eindeutiger Weise ein Element der Wertemenge
zuordnet. Dieses zugeordnete Element der Wertemenge heißt (Funktions)Wert von f an der Stelle bzw. in x mit x ∈ D. Manchmal spricht
man auch von dem Bild von x unter f und bezeichnet den Wert mit
f(x). Dabei nennt man x ein Urbild 2 von y = f(x) unter f.
2
D8
Zwei Abbildungen f, g heißen genau dann gleich, wenn die jeweilige
Definitions- Df , Dg und Wertemengen Wf , Wg identisch sind und für
alle x ∈ Df die Bilder von x unter f und g ebenfalls identisch sind. 2
Die Begriffe Funktion und Abbildung werden im weiteren Verlauf synonym verwendet.
D9
Wichtige Beispiele sind die
konstante Funktionen:
f : A → B, x 7→ f(x) := c ∈ B
Identität:
idA : A → A, x 7→ idA (x) := x
kanonische Injektion oder natürliche Einbettung:
A ∈ B, inA,B : A → B, x 7→ inA,B (x) := x
i-te Projektion:
f : A1 × · · · × An → Ai , x 7→ f(x1 , . . . , xn ) := xi
2
D 10
Eine Abbildung f : A × A → A nennt man auch eine zweistellige Operation auf A.
2
D 11.1
Ist f : A → B eine Abbildung, dann heißt die Menge aller Bilder unter f
Bild von A unter f. Man schreibt f(A) oder Bild f und für Teilmengen
U von A schreibt man f(U).
D 11.2
Für B oder eine Teilmenge B 0 von B heißt die Menge aller Elemente
der Definitionsmenge, die auf B bzw. B 0 abgebildet werden, das Urbild
von B bzw. B 0 unter f.
2
Elementare benennens- und untersuchenswerte Eigenschaften einer Abbildung sind die Injektivität, Surjektivität und Bijektivität. Eine AbEin Element der Wertemenge kann kein, genau eins oder mehrere Urbilder aus
der Definitionsmenge haben.
2
Repetitorium
6
lineare Algebra
0 Präliminarien
D 12.1
D 12.2
D 12.3
D 13
D 14
S 4.1
S 4.2
S 4.3
S 4.4
S 4.5
Abbildungen
bildung f : A → B heißt
injektiv falls jedes Element der Wertemenge höchstens ein Urbild unter
f besitzt.
surjektiv falls jedes Element der Wertemenge einem Urbild unter f
zugeordnet wird.
bijektiv falls jedes Element der Wertemenge genau ein Urbild unter f
2
besitzt.3
Ist eine Abbildung von A in B bijektiv, dann spricht man von einer
Abbildung von A auf B. Durch einschränken der Wertemenge einer
Abbildung f auf ihr Bild, lässt sich eine surjektive Abbildung definieren, die im wesentlichen die gleichen Eigenschaften wie f hat (aber nicht
gleich f ist s. D 8). Auch in dem man die Definitionsmenge entsprechend
einschränkt, lässt sich oft eine Abbildung definieren, die noch alle wesentlichen Merkmale der ursprünglichen Abbildung hat, ergänzt um die
Injektivität. Hierzu definiert man die Beschränkung einer Abbildung.
Eine Abbildung f : A → B heißt Beschränkung auf à ⊂ A, falls jedem
Element aus à das selbe Element wie dem entsprechenden Element aus
A zugeordnet wird. Man schreibt f|Ã : Ã → B, (f|Ã )(x) := f(x).
2
Um das hintereinander Ausführen von geeigneten Funktionen formalisieren zu können, definiert man den Begriff der Komposition bzw.
Verkettung.
Die Abbildung g ◦ f heißt Komposition, wobei sie die Definitionsmenge
der Abbildung f und die Wertemenge der Abbildung g hat. Die Zuordnungsvorschrift setzt sich zusammen aus dem hintereinander Ausführen
der Zuordnungsvorschriften von f auf x und von g auf f(x), woraus sich
für die Existenz von g ◦ f ergibt, dass die Bildmenge von f Teilmenge
der Definitionsmenge von g sein muss.
2
Mit dem bis hier hin entwickelten Begriffsapparat zu Abbildungen, können die folgenden Aussagen abgeleitet werden.
Die Komposition dreier Abbildungen f, g, h ist assoziativ, d.h. es gilt
(h ◦ g) ◦ f = h ◦ (g ◦ f)
Alle Abbildungen f : A → B sind bezüglich der Komposition unitär,
d.h. idA ◦ f = f = f ◦ idB .
Weiter gilt für beliebige Abbildungen f : A → B, g : B → C
Ist sowohl f als auch g injektiv, so ist auch g ◦ f injektiv.
Ist sowohl f als auch g surjektiv, so ist auch g ◦ f injektiv.
Ist sowohl f als auch g bijektiv, so ist auch g ◦ f bijektiv.
3
also genau dann, wenn f injektiv und surjektiv ist
Repetitorium
7
lineare Algebra
0 Präliminarien
Abbildungen
S 4.6
Ergibt die Komposition von f : M → N nach g : N → M die Identität
von N, dann ist f injektiv und g surjektiv.
S 4.7
Ergibt die Komposition von f nach g die Identität von N und umgekehrt
die Komposition von g nach f die Identität von M, dann sind beide
Abbildungen bijektiv.
S 4.8
Ist f : A → B bijektiv, so existiert genau eine Abbildung g : B → A mit
den Eigenschaften, dass die Komposition von g, f identisch ist mit der
Identität von A, während die Komposition von f und g identisch ist
mit der Identität von B.
2
D 15
S 5.1
S 5.2
S 5.3
Da die in S 4.8 genannte Abbildung g öfter Gegenstand von Untersuchungen ist, lohnt es eine eigene Bezeichnung für sie einzuführen.
Ist f : A → B eine bijektive Abbildung, dann heißt die eindeutig bestimmte Abbildung f−1 , deren Wertemenge die Definitionsmenge von
f, deren Definitionsmenge die Wertemenge von f ist, und die jedem Element y ihrer Definitionsmenge das eindeutig bestimmte Urbild x unter
f zuordnet, Umkehrabbildung von f.
2
Mit dem Begriff der Umkehrabbildung lassen sich noch weitere elementare Folgerungen ableiten.
Für jede Menge A ist idA bijektiv und identisch mit ihrer Umkehrabbildung.
Ist die Abbildung f bijektiv, dann ist auch die Umkehrabbildung von
f bijektiv und die Umkehrabbildung der Umkehrabbildung ist wieder f
selbst.
Sind die Abbildungen g und f bijektiv, dann ist auch die Komposition
von g und f bijektiv und die Umkehrabbildung der Komposition von g
und f gleich der Komposition der jeweiligen Umkehrabbildungen von g
2
und f. Wobei g und f entsprechend D 14 vorliegen müssen.
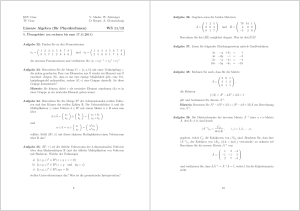
Es sei an dieser Stelle noch angemerkt, dass das Kommutativgesetz
bezüglich der Komposition zweier wohldefinierter Komposita im Allgemeinen nicht gilt. Es kann mitunter der Übersichtlichkeit dienen, Komposita in einem Diagramm darzustellen.
f
Derartige Diagramme heißen kommutaX
Y
tiv, falls die Komposition aller Abbildungen, die auf dem Weg von einer Menj
ψ
ϕ
g
ge X zu einer Menge Y liegen, identisch
V
U
ist mit allen anderen Kompositionen aller
h
Abbildungen anderer Wege zwischen den
Kommutativ Diagramm
Mengen X und Y. Das nebenstehende Diagramm entspricht der Assoziativitätsaussage von S 4.1 für Funktionen
Repetitorium
8
lineare Algebra
0 Präliminarien
D 16
Zahlen
f : X → Y, g : Y → U und h : U → V. (s. [Ama98, S. 19], [Jän03, S. 12])
Schließlich lässt sich der Begriff der Permutation auf den Abbildungsbegriff zurückführen.
Eine bijektive Abbildung von M auf sich selbst heißt Permutation von
M. Die Menge aller Permutationen einer Menge M wird formal mit
S(M) bezeichnet.
2
0.3 Zahlen
Eine gute Möglichkeit die Begriffe Menge und Abbildung anzuwenden
ist die Konstruktion der, für den mathematischen Alltag benötigten,
Zahlen.
0.3.1 Natürliche Zahlen
D 17
Es beginnt mit den natürlichen Zahlen, deren Charakterisierung dem
intuitiven Zählen nachempfunden ist und durch die Peanoaxiome4 formalisiert werden.
Eine Menge N heißt Menge der natürlichen Zahlen, wenn sie durch die
folgenden Axiome beschrieben wird. Sei f : N → N\{erstes Element}
die Abbildung, die einer natürlichen Zahl ihren Nachfolger zuordnet.
P 17.1 Es gibt ein ausgezeichnetes erstes Element in N.
P 17.2 Ist n aus N, dann ist auch f(n) – also ihr Nachfolger – aus N.
P 17.3 Ist n aus N, dann ist f(n) nicht das erste Element. Das erste
Element ist also die einzige Zahl die keiner Zahl nachfolgt.
P 17.4 f ist injektiv. Jede natürliche Zahl hat also ihren individuellen
Nachfolger.
P 17.5 Ist A eine Teilmenge von N, das erste Element liegt in A und
für jedes a ∈ A ist gauch f(a) ∈ A, dann gilt A = N.5 Dieses
Axiom stellt sicher, dass alle Zahlen durch Zählen erreicht werden
können (f ist surjektiv).
2
D 18.1
D 18.2
Für gewöhnlich definiert man 1 := erstes Element gemäss P 17.1,
2 := f(1), 3 := f(2), . . .
und n + 1 := f(n)
2
Ohne weiteren Beweis sei festgehalten, dass die Menge der natürlichen
Zahlen existiert und es sinnvoll ist im Zusammenhang mit den Natürlichen Zahlen einen bestimmten Artikel zu verwenden, also von der
4
5
Die Peanoaxiome gehen auf R. Dedekind und G. Peano zurück
Induktionsaxiomschema
Repetitorium
9
lineare Algebra
0 Präliminarien
Zahlen
Menge der natürlichen Zahlen zu sprechen, wenngleich sie nicht im üblichen Sinne eindeutig ist.
D 19
Die Menge der natürlichen Zahlen von 1 bis n sei im Weiteren mit Nn
bezeichnet.
2
Aus dem fünften Peanoaxiom motiviert man ein wichtiges Beweis- und
Definitionsverfahren.
0.3.1.1 Definition durch Rekursion
Das Definitionsverfahren nennt man rekursiv und man definiert durch
Angabe einer Rekursionsvorschrift. Dieses Verfahren kommt zum Einsatz wenn beliebig viele Objekte definiert werden sollen, von denen ein
jedes durch eine natürliche Zahl eindeutig bestimmt werden kann. Man
definiert zunächst einen Rekursionsanfang (RA), indem das erste Objekt ausdrücklich angegeben wird. Dann nimmt man im Rekursionsschritt (RS) an, dass ein n-tes Objekt schon definiert ist und definiert
das (n + 1)-te Objekt. Der Trick hierbei ist, dass durch die explizite
Angabe des ersten Objektes, ein konkretes Objekt vorliegt, welches als
n-tes Objekt benutzt werden kann. Damit erhält man dann durch Anwendung des Rekursionsschritts das zweite konkrete Objekt, auf das
sich wieder der Rekursionsschritt anwenden lässt und so weiter. Das
fünfte Peanoaxiom garantiert nun, dass jedes Objekt erreicht wird, das
durch die Rekursionsvorschrift definiert ist.
Beispielsweise könnte man das Ergebnis sb des Hinzuzählens einer natürlichen Zahl b zu einer natürlichen Zahl a definieren wollen.
D 20
Dann definiert man über b den Rekursionsanfang mit:
s1 := a + 1 := f(a),
und unter der Annahme sb = a + b sei bereits definiert, legt man den
Rekursionsschritt fest:
sb+1 := a + f(b) := f(a + b).
2
5 + 3 lässt sich dann wie folgt berechnen:
5+3
= 5 + f(2)
(D 18.1)
= f(5 + 2)
(D 20 Rekursionsschritt)
= f(5 + f(1))
(D 18.1)
= f(f(5 + 1))
(D 20 Rekursionsschritt)
(D 20 Rekursionsanfang oder D 18.2)
= f(f(f(5)))
= f(f(6))
(D 18.1)
= f(7)
(D 18.1)
= 8
(D 18.1)
Repetitorium
10
lineare Algebra
0 Präliminarien
D 21
Zahlen
Nun könnte man noch definieren, dass sb = a + b Summe von a und
b heißt.
2
Da sb auf die Nachfolgerfunktion zurückgeführt wird und jede natürliche Zahl einen Nachfolger hat P 17.2 ist die Existenz von sb gesichert. Da jede natürliche Zahl genau einen Nachfolger hat P 17.4 ist sb
eindeutig. Damit könnte man jetzt noch die wohldefiniere zweistellige
Operation (s. D 10)
D 22
+ : N × N → N, (a, b) 7−→ a + b
festlegen und ihr den Namen Addition geben.
2
0.3.1.2 Vollständige Induktion
Das aus dem fünften Peanoaxiom resultierende Beweisverfahren wird
vollständige Induktion über eine Variable n aus N genannt und liefert eine Aussage über beliebig viele natürliche Zahlen mit endlichen
Mitteln. Hierbei zeigt man im sogenannten Induktionsanfang, dass eine Aussage für eine bestimmte natürliche Zahl z.B. der 1 gilt.
Dann setzt man in der Induktionsannahme voraus, dass die Aussage
für ein beliebiges Element n aus N gilt.
Um dann im Induktionsschritt zu zeigen, dass die Aussage für n+1
gilt (unter der Voraussetzung, dass die Induktionsannahme gültig ist).
Da n beliebig ist und nur während des Induktionsschrittes fixiert wird,
kann man statt n die Zahl aus dem Induktionsanfang einsetzen für die,
die Gültigkeit der Aussage explizit bewiesen wurde. Dann gilt aber wegen des Induktionsschrittes die Aussage auch für den Nachfolger des
Induktionsanfangs. Gilt die Aussage für den Nachfolger des Induktionsanfangs, dann gilt sie wegen des Induktionsschrittes auch für den
Nachfolger des Nachfolgers des Induktionsanfangs und so weiter und so
fort. Und mit P 17.5 ist sichergestellt, dass die Aussage für alle natürlichen Zahlen ab dem Induktionsanfang gültig ist.
Man kann beispielsweise das Assoziativgesetz
a + (b + c) = (a + b) + c für alle a, b, c ∈ N
für die oben definierten Addition mittels vollständiger Induktion über
c beweisen.
Der Induktionsanfang sei 1 es muss also gezeigt werden, dass
(IA)
a + (b + 1) = (a + b) + 1
gilt.
a + (b + 1)
= a + f(b)
(D 20 Rekursionsanfang)
= f(a + b)
(D 20 Rekursionsschritt)
(D 20 Rekursionsanfang)
= (a + b) + 1
Repetitorium
11
lineare Algebra
0 Präliminarien
Zahlen
Also ist (IA) wahr. Sei nun
(IV)
a + (b + c) = (a + b) + c
für ein beliebig gewähltes c als gültig vorausgesetzt.
Im Induktionsschritt versucht man zu zeigen, dass die Aussage auch für
c + 1 gültig ist, also
(IS)
a + (b + (c + 1)) = (a + b) + (c + 1).
a + (b + (c + 1))
= a + (b + f(c))
(D 20 Rekursionsanfang)
= a + f((b + c))
(D 20 Rekursionsschritt)
= f(a + (b + c))
(D 20 Rekursionsschritt)
= f((a + b) + c)
(wegen (IV))
= (a + b) + f(c)
(D 20 Rekursionsschritt)
(D 20 Rekursionsanfang)
= (a + b) + (c + 1)
Also ist (IS) bewiesen unter der Voraussetzung, dass (IV) gültig ist.
Wegen (IA) gilt die zu beweisende Aussage für c = 1, mit [IS] gilt sie
dann aber auch für c = 2 und wegen P 17.5 gilt sie für alle c ∈ N.
Mittels der Menge N kann man den Begriff der endlichen bzw. unendlichen Menge M für die Bedürfnisse dieses Exzerpts präzisieren.
D 23.1
Ist M die leere Menge oder existiert ein n aus den natürlichen Zahlen
und lassen sich die Elemente von M mit den natürlichen Zahlen von 1
bis n abzählen, also M = {m1 , . . . , mn }, dann ist M endlich.
D 23.2
Ist M eine endliche Menge, dann heißt das n ∈ N im Sinne von D 23.1
die Kardinalzahl oder auch die Kardinalität von M. Man schreibt
formal n =: |M| und setzt |∅| := 0.
Eine Menge heißt unendlich, wenn sie nicht endlich ist.
2
Mit dieser Begriffsbildung und der Addition der natürlichen Zahlen
lässt sich nun zeigen, dass
D 23.3
S 6.1
S 6.2
sowohl die Vereinigung als auch der Durchschnitt zweier endlichen Mengen A, B endlich ist.
Es gilt der Zusammenhang |A ∪ B| = |A| + |B| − |A ∩ B|
2
D 24
Die Menge aller Permutationen (D 16) der Zahlen von 1 bis n wird
formal mit Sn := S(Nn ) bezeichnet.
2
S7
Sn ist endlich und enthält n · (n − 1) · · · · · 2 · 1 Permutationen.
2
Der Beweis |Sn | = n · (n − 1) · · · · · 2 · 1 kann per vollständiger Induktion
über n geführt werden. Man kann auch einen eher informellen Beweis
führen, der durchsichtiger ist als der Induktionsbeweis. Nimmt man an,
dass n-Stellen zur Verfügung stehen etwa (−1 , −2 , −3 , . . . , −n ) um die
n-Elemente von Nn zu verteilen, dann hat man offensichtlich für die
Repetitorium
12
lineare Algebra
0 Präliminarien
D 25
Zahlen
erste Zahl n Möglichkeiten sie auf eine der Stellen zu verteilen. Für die
zweite Zahl bleiben für jede der n Möglichkeiten der ersten Zahl n − 1
Möglichkeiten auf eine der verbleibenden Stellen verteilt zu werden, so
dass es insgesamt n · (n − 1) Möglichkeiten zur Verteilung der ersten
beiden Zahlen gibt. Für die dritte Zahl gibt es dann (n−2) Verteilungsmöglichkeiten je n · (n − 1) Möglichkeiten der ersten beiden Zahlen, also
insgesamt n · (n − 1) · (n − 2) Möglichkeiten die ersten drei Zahlen auf n
Stellen zu verteilen. Dies lässt sich bis zur n-ten Zahl fortsetzen wobei
für jede weitere Zahl immer eine Stelle weniger je Anzahl der vorangegangenen Möglichkeiten zur Verfügung steht. Insgesamt gibt es also
die Behaupteten n · (n − 1) · · · · · 2 · 1 Möglichkeiten die Zahlen 1 bis n
anzuordnen. Dieser Beweis lässt sich im Übrigen auf eine Menge aus n
beliebigen Objekten verallgemeinern. Abkürzend definiert man:
Das Produkt der Faktoren von 1 bis n heißt Fakultät von n und wird
formal mit n! := 1 · · · · · n bezeichnet.
2
0.3.2 Komplexe Zahlen
Motivieren lässt sich die Einführung der komplexen Zahlen durch den
Wunsch auch Gleichungen wie z.B. x2 + 1 = 0 lösen zu können, die
wegen x2 + 1 = x2 + 12 > 0 in R keine Lösung haben kann. Man kann
durch die Erweiterung der reellen Zahlen auch der gerade genannten
Gleichung eine Lösung zuordnen.
D 26
Man definiert auf der Menge aller Paare, deren Komponenten aus den
reellen Zahlen sind, eine Addition
(a, b) ⊕ (a 0 , b 0 ) := (a + a 0 , b + b 0 ) =: (a, b) + (a 0 , b 0 )
und eine Multiplikation
(a, b) (a 0 , b 0 ) := (aa 0 − bb 0 , ab 0 + ba 0 ) =: (a, b)(a 0, b 0 )
und nennen diese Menge C bzw. Menge der komplexen Zahlen.
2
Da (a, 0)(a , 0) = (aa , 0) und (a, 0) + (a , 0) = (a + a , 0) gilt, kann
man (a, 0) und (a 0 , 0) mit den reellen Zahlen a und a 0 identifizieren
und mit R = {(a, 0) | a ∈ R} ⊂ C die komplexen Zahlen als Erweiterung
der reellen betrachten.
0
D 27
S 8.1
S 8.2
0
0
0
Man definiert für gewöhnlich i := (0, 1) ∈ C und nennt diese komplexe
Zahl imaginäre Einheit.
2
Damit kann der Satz formuliert werden, dass
zu jeder komplexen Zahl z zwei eindeutig bestimmte reelle Zahlen a, b
existieren mit der Eigenschaft z = a + bi = (a, 0) + (b, 0)(0, 1) = (a, b).
Benutzt man diese eindeutige Darstellung kann weiter gezeigt werden
z + z 0 = (a + bi) + (a 0 + b 0 i) = (a + a 0 ) + (b + b 0 )i
Repetitorium
13
lineare Algebra
0 Präliminarien
Zahlen
zz 0 = (a + bi)(a 0 + b 0 i) = (aa 0 + bb 0 ) + (ab 0 + ba 0 )i.
2
D 28
Dadurch ist das Rechnen mit komplexen Zahlen in gewohnte Bahnen
gelenkt, und folgende Definition motiviert:
Stellt man eine komplexe Zahl in der Form z = a + bi mit a, b ∈ R dar,
dann heißt a der Realteil von z und man definiert a =: Re z. Weiter
heißt b der Imaginärteil von z und man definiert b =: Im z. Man sagt
z ist reell falls der Imaginärteil von z Null ist. Schließlich heißt z rein
imaginär falls der Realteil von z Null ist.
2
|b|
0.3.2.1 Geometrische Betrachtungen
Im
Da C mit der Menge R2 übereinstimmt können
z
die komplexen Zahlen als Punkte in der Zeiche|
nebene gedeutet werden. Man spricht dabei von i
|z
der komplexen Ebene oder auch von der Gaußϕ |a|
schen Zahlenebene [Lex00, S. 325]. Wobei man
Re
1
die Abszisse als reelle Achse bezeichnet und die
komplexe Ebene
Ordinate als imaginäre Achse. Unter Zuhilfenahme des Satzes des Pythagoras lässt sich das Quadrat der Hypotenuse z2 eines rechtwinkligen Dreiecks als die Summe der quadrierten
Katheten a2 , b2 darstellen.
D 29
Hiervon motiviert kann man definieren, dass
für eine komplexe Zahl z die Wurzel aus der Summe des quadrierten
Imaginärteils und des quadrierten Realteils der Betrag von z heißt, also
√
|z| = a2 + b2 mit z = a + bi ∈ C.
2
In dem oben angegebenen Dreieck 0za kann vermöge elementarer Trigonometrie der Kosinus und der Sinus von ϕ mit dem Real– und Imaginärteil von z in Verbindung gebracht werden. Denn es gilt
cos ϕ =
sin ϕ =
D 30
Ankathete
Hypotenuse
=
Gegenkathete
Hypotenuse
a
|z|
=
⇒ a = |z| cos ϕ,
b
|z|
⇒ b = |z| sin ϕ.
Damit lässt sich die Darstellung in Polarkoordinaten einer komplexen
Zahl z definieren
z = |z|(cos ϕ + i sin ϕ)
2
Repetitorium
14
lineare Algebra
0 Präliminarien
Zahlen
Spiegelt man eine komplexe Zahl
z = a + bi ∈ C
an der reellen Achse, dann heißt die
gespiegelte Zahl
z̄ = a − bi
die konjugiert komplexe Zahl von z.
Die Summe zweier komplexer Zahlen
z, z 0 lässt sich geometrisch ermitteln
indem man über den beiden Strecken
0z, 0z 0 ein Parallelogramm errichtet
und in diesem von der 0 ausgehend die
Diagonale bildet.
i
Im
z
Re
1
z̄
konjugiert komplex
Im
z + z0
i
0
z
z0
Re
1
komplexe addition
S 9.1
S 9.2
0
ϕ
+
ϕ
Stellt man das Produkt zweier komplexer
Im
Zahlen in der Polarform dar
0
0
0
0
zz 0
zz = |z||z |(cos ϕ + i sin ϕ)(cosϕ + i sin ϕ )
dann folgt mit den Additionstheoremen des
Sinus und Kosinus
z
i
zz 0 = |z||z 0 | (cos(ϕ + ϕ 0 ) + i sin(ϕ + ϕ 0 ))
z0
Das Produkt kommt also zustande indem
ϕ0
ϕ
man die beiden Winkel ϕ und ϕ 0 aufsum0
Re
1
miert und das Produkt der Beträge von z
komplexe Multiplikation
und z 0 bildet.
Zum Abschluss dieses Abschnitts noch ein paar Folgerungen zum Rechnen mit komplexen Zahlen.
Das Quadrat der komplexen Einheit ist −1.
Das konjugiert Komplexe einer konjugiert komplexen Zahl ist die komplexe Zahl selbst.
S 9.3
Das konjugiert Komplexe einer Summe zweier komplexer Zahlen ist
gleich der Summe des jeweiligen konjugiert Komplexen dieser beiden
komplexen Zahlen.
S 9.4
Das konjugiert Komplexe eines Produkts zweier komplexer Zahlen ist
gleich dem Produkt des jeweiligen konjugiert Komplexen dieser beiden
komplexen Zahlen.
S 9.5
Ist eine komplexe Zahl nicht Null, dann ist auch das konjugiert Komplexe dieser Zahl nicht Null, und das konjugiert Komplexe des Kehrwerts
dieser komplexen Zahl ist gleich dem Kehrwert des konjugiert Komplexen dieser Zahl.
S 9.6
Das Produkt einer komplexen Zahl und ihrem konjugiert Komplexen
Repetitorium
15
lineare Algebra
0 Präliminarien
Der Körperbegriff
ist identisch mit dem quadrierten Betrag dieser komplexen Zahl und
somit eine reelle Zahl6 .
S 9.7
S 9.8
S 9.9
S 9.10
Eine komplexe Zahl ist gleich ihrem konjugiert Komplexen genau dann,
wenn der Imaginärteil Null ist.
Der Betrag einer komplexen Zahl ist stets nicht negativ und Null genau
dann, wenn die komplexe Zahl selbst Null ist.
Der Betrag eines Produktes zweier komplexer Zahlen ist identisch mit
dem Produkt der jeweiligen Beträge dieser komplexer Zahlen.
Der Betrag einer komplexen Zahl ist gleich dem Betrag des konjugiert
Komplexen dieser Zahl.
2
0.4 Der Körperbegriff
Der Körperbegriff definiert eine Struktur, die das aus der Schule gewohnte Rechnen mit rationalen und reellen Zahlen formalisiert und
verallgemeinert. Dies hat den Vorteil, dass das „Rechnen” systematischer (logischer) Untersuchungen zugänglich wird, und dass sich das
wesentliche des Rechnens auch auf andere Mengen als die rationalen
und reellen Zahlen übertragen lässt. So kann man beispielsweise mit
geeigneten Definitionen für die Addition und Multiplikation auf der
Menge {0, 1} rechnen wie auf der Menge der rationalen Zahlen.
D 31
Ein Körper K ist ein Tripel (K, +, ·) bestehend aus einer Menge K, einer
zweistelligen Operation + auf K (s. D 10) und einer zweistelligen Operation · auf K. Die Operation + heißt Addition und · Multiplikation.
K 31.1 Von der Menge K wird gefordert, dass sie wenigstens zwei Elemente enthält.
K 31.2 Bezüglich beider Operationen gilt sowohl das Kommutativgesetz als auch das Assoziativgesetz.
K 31.3 Bezüglich der Multiplikation kann ein Distributivgesetz formuliert werden, es ist also egal ob zuerst die Summe zweier Elemente
a, b aus K gebildet wird, die dann mit einem weiteren Element c
aus K multipliziert wird; oder ob zuerst die beiden Produkte von
c und a sowie von c und b gebildet werden, die dann aufsummiert
werden.
K 31.4 Es existiert bezüglich beider Operationen ein neutrales Element,
so dass alle Paare aus K × K, bestehend aus einem beliebigen
Element k und dem jeweiligen neutralen Element, auf k abgebildet
werden.
Damit kann ein komplexer Nenner eines Bruchs durch erweitern mit dem konjugiert Komplexen des Nenners stets reell gemacht werden.
6
Repetitorium
16
lineare Algebra
0 Präliminarien
Der Körperbegriff
K 31.5 Es existiert bezüglich beider Operationen ein inverses Element,
so dass alle Paare aus K × K, bestehend aus einem beliebigen Element k und dem jeweiligen inversen Element, auf das jeweilige
neutrale Element abgebildet werden. Hierbei muss allerdings das
neutrale Element der Addition von der multiplikativen Inversion ausgeschlossen werden. Da die Existenz eines multiplikativen
inversen zum neutralen Element der Addition es ermöglichte, widersprüchliche Sätze aus dem Körperbegriff abzuleiten.
S 10
S 11
2
Indem man annimmt es gäbe je zwei Elemente in K mit den Eigenschaften des neutralen Elements der Addition bzw. Multiplikation7 und des
additiven bzw. multiplikativen Inversen8 lässt sich zeigen, dass
das neutrale Element der Addition bzw. Multiplikation sowie das jeweilige additive bzw. multiplikative Inverse eindeutig bestimmt sind. 2
Unter Zuhilfenahme des Axioms K 31.1 kann man ableiten, dass
das neutrale Element der Addition und das neutrale Element der Multiplikation zwei verschiedene Elemente aus K sind.
2
Um die Verbindung zum gewohnten Rechnen herzustellen, ist es sinnvoll noch einige Benennungen vorzunehmen.
D 32.1
Das eindeutig bestimmte neutrale Element der Addition heißt Null und
wird formal mit 0 bezeichnet.
D 32.2
Das eindeutig bestimmte neutrale Element der Multiplikation heißt
Eins und wird formal mit 1 bezeichnet.
Das für ein Element k aus K eindeutig bestimmte additive Inverse heißt
das Negative von k und wird formal mit −k bezeichnet.
Das für eine Element k aus K eindeutig bestimmte multiplikative Inverse
2
heißt das Reziproke von k und wird formal mit k1 bezeichnet.
D 32.3
D 32.4
D 33
Körper lassen sich definieren auf der Menge der rationalen, reellen, komplexen Zahlen sowie auf den Mengen Fp := {0, . . . , p − 1} wobei p eine
Primzahl ist. Die Addition bzw. Multiplikation wird auf Fp als Rest der
Division des Ergebnisses der jeweiligen Operation auf den natürlichen
Zahlen und der Primzahl p definiert.
In diesem Zusammenhang führt man den Begriff der Charakteristik
eines Körper ein. Existiert eine natürliche Zahl n, so dass das n-Fachen
des neutralen Elements der Multiplikation das neutrale Element der
Addition ergibt, dann hat der Körper die Charakteristik n anderenfalls
0.
2
7
8
für alle k ∈ K
für ein k ∈ K
Repetitorium
17
lineare Algebra
0 Präliminarien
D 34
Der Körperbegriff
Im Anschluss an diese Begriffsbildung kann man zeigen, dass n stets
eine Primzahl ist, indem man die Annahme zum Widerspruch führt, es
gäbe ein Produkt dessen Faktoren größer als Eins sind, das n ergibt
und die gerade genannten Eigenschaft hat [Jän03, S. 37 f.].
Der Begriff des Körpers lässt sich noch deutlich kompakter definieren
indem der Begriff der Gruppe eingeführt wird.
Eine Gruppe ist ein Paar (G, ?), dass aus einer Menge G und einer
Operation ? : G × G → G besteht, die den folgenden Axiomen genügen:
G 34.1 Bezüglich ? gilt das Assoziativgesetz.
G 34.2 Es gibt ein Element g̃ mit dem alle Elemente aus G auf sich
selbst abgebildet werden (g ? g̃ = g).
G 34.3 Es gibt zu jedem Element g aus G ein Element ḡ aus G so dass
g und ḡ auf g̃ abgebildet werden (g ? ḡ = g̃)
g̃ wird analog zur Körperdefinition neutrales Element genannt und ḡ
als Inverses von g bezeichnet.
2
D 35
Sei G = (G, ?) ein Gruppe. G heißt kommutative oder auch abelsche
Gruppe genau dann, wenn ? kommutativ ist.
2
Nun könnte man einen Körper als Tripel (K, +, ·) definieren, das bezüglich der Paare (K, +) und (K\{0}, ·) abelsche Gruppe bildet mit einer
Menge K, die wenigstens zwei Elemente enthält, und dessen Operation
+ und · distributiv sind.
0.4.1 Rechnen im Körper
S 12
S 13.1
S 13.2
Im folgenden sei K = (K, +, ·) ein Körper und a, b, c, d, a1, . . . , an sind
Elemente aus diesem. Außerdem sind n und m Elemente der natürlichen Zahlen.
Da es zu weit führen würde die Begriffe Beklammerung und Reihenfolge formal zu präzisieren, seien hier die Verallgemeinerung des
Assoziativ- und Distributivgesetzes genannt, ohne die Beweismöglichkeit mit eingeführten Begriffen.
Das Assoziativ und Distributivgesetz der Addition bzw. Multiplikation
gilt für endlich viele Elemente aus K.
2
Mit K 31.4, 31.3 folgt, dass das Produkt aus einem beliebig und dem
neutralen Element der Addition stets das neutrale Element der Addition
ergibt.
Aus K 31.5, 31.2 lässt sich die Kürzungsregel ableiten. D.h. sind die
beiden Produkte von a und c sowie von b und c identisch, und ist
c nicht das neutrale Element der Addition, dann sind auch a und b
identisch.
Repetitorium
18
lineare Algebra
0 Präliminarien
Der Körperbegriff
S 13.3
Das K nullteilerfrei ist kann man vermöge S 13.1, 13.2 zeigen. D.h.
unter der Annahme, dass das Produkt von a und b das neutrale Element
der Addition ist folgt, dass a oder b mit dem neutralen Element der
Addition identisch ist.
2
D 36
Definiert man nun noch die Differenz von a und b mit a−b := a+(−b);
wobei a der Minuend und b der Subtrahend heißt.
2
Dann lassen sich die gewohnten Vorzeichenregeln der Addition und Multiplikation ableiten.
S 14.1
Mit K 31.5, 31.2 lässt sich ableiten, dass das Negative vom Negativen
von a, a selbst ist.
S 14.2
Das Negative der Summe von a und b ist mit der Differenz vom negativen von a und b identisch, wie sich unter Zuhilfenahme von D 36,
K 31.5, S 12 zeigen lässt.
Per Definitionem D 36 gilt, dass die Differenz aus dem neutralen Element der Addition und einem Element aus K das Negative dieses Elements ist.
Das Produkt aus a und −b ist identisch mit dem Produkt aus −a und
b sowie mit dem Negativen des Produktes von a und b, wovon man
sich mit K 31.5, 31.3 und S 13.1 überzeugen kann.
Mit dem gerade formulierten Satz S 14.4 und S 14.1 gilt, dass das Produkt von zwei negativen Elementen gleich dem Produkt von diesem
beiden Elementen ist.
2
Um die Regeln des Bruchrechnens abzuleiten muss zunächst festgelegt
werden was ein Bruch ist.
S 14.3
S 14.4
S 14.5
D 37
Die Begriffe Produkt und Reziproke lassen sich weiterentwickeln zum
Quotienten von a und b, der als ab definiert ist durch das Produkt von
a und dem Reziproken von b. Elemente von K der Form ab heißen auch
Brüche in K. a heißt Zähler und b Nenner .
2
Nenner sind im Folgenden stets vom neutralen Element der Addition
verschieden.
S 15.1
Mit der gerade durchgeführten Definition und der Kürzungsregel folgt,
dass der Quotient von a und b genau dann mit dem Quotienten von c
und d identisch ist, wenn das Produkt von a und b mit dem von b und
c identisch ist.
S 15.2
Ein Bruch ist erweiterbar, denn der Quotient von a und dem neutralen
Element der Multiplikation ist a selbst, und der Quotient von a und a
ist das neutrale Element der Multiplikation.
S 15.3
Mit den Vorzeichenregeln ergibt sich, dass das Negative eines QuotienRepetitorium
19
lineare Algebra
0 Präliminarien
S 15.4
S 15.5
S 15.6
Der Körperbegriff
ten von a und b identisch ist mit dem Quotienten von negativem a und
b bzw. mit dem Quotienten von a und negativem b.
Das Produkt der Quotienten von a und b sowie von c und d ist gleich
dem Quotienten der Produkte von a und c sowie von b und d. Dies
lässt sich mit D 37, S 12 ableiten.
Die Summe zweier Quotienten von a und b sowie von c und d ist
identisch mit dem Quotienten von der Summe der Produkte von a und
d sowie von b und c und dem Produkt von b und d, was sich durch
geeignete Erweiterungen, das Distributivgesetz und der Definition des
Quotienten zeigen lässt.
Mit S 15.1, 15.2, 12 kann man zeigen, dass der Quotient zweier Quotienten von a und b sowie von c und d identisch ist mit dem Quotienten
der beiden Produkte von a und d sowie von b und c.
2
Um Additionen und Multiplikationen mit beliebig vielen Summanden
bzw. Faktoren in kompakter Weise aufschreiben zu können, führt man
das Summen und Produktzeichen ein.
0.4.1.1 Summenzeichen
D 38
D 39
P
Für die Summe a1 +· · ·+an wird die Bezeichnung9 n
i=1 ai eingeführt.
Wobei i Summationsindex oder auch Summationsbuchstabe heißt.
Die 1 und das n heißen untere bzw. oberer Summationsgrenzen. 2
Neben dieser intuitiven Definition des Summenzeichens gibt es noch
eine alternative rekursive Definition (s. 0.3.1.1) des Summenzeichens,
die vor allem für Induktionsbeweise nützlich sind, die Eigenschaften
von Summen belegen.
P0
Pk+1
Pk
+ ak+1 für alle k 6 n − 1
2
a
:=
0,
a
:=
a
i
i
i
i=1
i=1
i=1
Im Umgang mit Summen stellte sich die Verallgemeinerung von
P0
Pn
i=1 ai := 0 zu
i=m ai := 0 für alle n < m
als eine nützliche Konvention heraus.
Eine weitere Technik, die gelegentlich hilfreich in Beweisen eingesetzt
werden kann, ist die sogenannte Indexverschiebung
Pn
Pn+m
i=1 ai =
i=m+1 ai−m für alle m ∈ Z.
Und unter Ausnutzung des allgemeinen Kommutativgesetzes S 12 kann
man eine Summe auch von „Hinten nach Vorne” abarbeiten
Pn
Pn
a
=
i
i=1
i=1 a(n+1)−i
Es lassen sich einige naheliegende Rechenregeln für Summen ableiten,
deren Beweise in der Regel Induktionsbeweise über die obere Summationsgrenze sind. Der Induktionsanfang ist Null, so dass der Rekursions9
lies: Summe von i gleich eins bis n über ai
Repetitorium
20
lineare Algebra
0 Präliminarien
S 16.1
S 16.2
S 16.3
S 16.4
Der Körperbegriff
anfang der rekursiven Definition des Summenzeichens D 39 angewendet
P
werden kann. Im Induktionsschritt wird dann die Summe n+1
i=1 ai auf
Pn
die Summe i=1 ai + an+1 zurückgeführt, so dass die Induktionsvoraussetzung in die Argumentation eingehen kann.
Seien nun n, m ∈ N0 , a, a1 , . . . , an , . . . , an+m , b1 , . . . , bn ∈ K.
Eine Summe lässt sich in mehrere Summen zerlegen10
Pn+m
Pn
Pn+m
i=1 ai =
i=1 ai +
i=n+1 ai .
Eine Summe über eine Addition lässt sich zerlegen in Summen über die
jeweiligen Summanden der Addition
Pn
Pn
Pn
i=1 (ai + bi ) =
i=1 ai +
i=1 bi .
Ebenso kann man die Summe über eine Differenz in eine Summe über
den Minuend und eine über den Subtrahend zerlegen.
Pn
Pn
Pn
i=1 (ai − bi ) =
i=1 ai −
i=1 bi .
Es gilt das allgemeine Distributivgesetz
Pn
Pn
a i=1 ai = i=1 aai .
2
Gelegentlich stößt man auf Summen deren Summanden alle übereinstimmen. Für diese Summen führt man in der Regel einen eigenen Begriff ein.
D 40
Für ein n aus den ganzen Zahlen und ein a aus einem Körper definiert man das n-Fache von a und schreibt na gemäß der folgenden
Fallunterscheidung
Fall n > 0:
Pn
D 39
· · + a}
0a := 0, (n + 1)a := na + a −−−→ na = i=1 a = a
| + ·{z
n−Summanden
Fall n < 0:
na := (−n)(−a) =
S 17.1
S 17.2
S 17.3
P−n
i=1 (−a)
= −a
· · + −a}
| + ·{z
n−Summanden
2
Es lassen sich die nachstehenden Rechenregeln über Vielfache für alle
m, n aus den ganzen Zahlen ableiten.
Das n-Fache von 0 ist 0, das 1-Fache von a ist a und das −1-Fache von
a ist das negative von a.
Das (n + m)-Fache von a ist die Summe des n-Fachen von a und mFachen von a.
Das (nm)-Fache von a ist das n-Fache vom m-Fachen von a.
Natürlich können zwei geeignet indizierte Summen mit geeigneten Summanden
auch zusammengezogen werden.
10
Repetitorium
21
lineare Algebra
0 Präliminarien
Der Körperbegriff
S 17.4
Das n-Fache der Summe von a und b ist die Summe vom n-Fachen von
a und dem n-Fachen von b.
S 17.5
Das n-Fache des Produktes von a und b ist sowohl das Produkt des
n-Fachen von a und b als auch das Produkt von a und dem n-Fachen
von b.
2
0.4.1.2 Produktzeichen
D 41
Für das eindeutig bestimmte und von seiner Klammerung unabhängige
Produkt a1 · · · ·· an ∈ K führt man das Produktzeichen ein, indem man
setzt11
Qn
i=1 ai := a1 · · · · · an
2
D 42
Auch hier lässt sich eine nützliche rekursive Definition (s. 0.3.1.1) angeben
Q0
Qk+1
Qk
i=1 ai := 1,
i=1 ai :=
i=1 ai · ak+1 für alle k 6 n − 1,
Q0
2
und in Verallgemeinerung von i=1 ai := 1
Qn
i=m ai := 1 für alle n < m
festlegen.
Selbstverständlich lässt sich auch hier eine Identität zur Indexverschiebung formulieren
Qn
Qn+m
a
=
i
i=1
i=m+1 ai−m für alle n ∈ Z
und das Produkt von „Hinten nach Vorne” abarbeiten
Qn
Qn
i=1 ai =
i=1 an+1−i .
S 18.1
S 18.2
Mit einer analogen Vorgehensweise wie bei den Summen können die
Rechenregeln über Produkte bewiesen werden. Auch hier ist wieder
m, n ∈ N und a1 , . . . , an , . . . , am+n , b1 , . . . , bn ∈ K vorausgesetzt.
Ein Produkt lässt sich in mehrere Produkte zerlegen
Qn+m
Qn+m
Qn
i=1 ai =
i=n+1 ai .
i=1 ai
Ein Produkt über eine Multiplikation lässt sich zerlegen in Produkte
über die jeweiligen Faktoren des Produkts.
Qn
Qn
Qn
i=1 bi .
i=1 ai
i=1 (ai bi ) =
2
Analog zum n-Fachen eines Elements aus K, dem n-maligen aufsummierens dieses Elements, kürzt man das n-malige Multiplizieren eines
Elements aus K ab, indem man
Repetitorium
22
lineare Algebra
1 Vektorraumtheorie
D 43
die n-te Potenz von a als an rekursiv definiert durch
Qn
D 42
· · · a}
a0 := 1, an+1 := an · a −−−→ an = i=1 a = a
| · ·{z
n−Faktoren
für n ∈ N . Ist n ∈ Z und a 6= 0, dann definiert man die n-te Potenz
für n < 0 mit
0
an :=
1 −n
.
a
a heißt Basis und n der Exponent der Potenz an .
S 19.1
S 19.2
S 19.3
S 19.4
2
Ist n, m ∈ Z und sind a, b ∈ K ungleich Null für den Fall, dass n, m
kleiner als Null sind, dann gelten die folgenden Rechenregeln für Potenzen
Die n-te Potenz des neutralen Elements der Multiplikation ergibt das
neutrale Element der Multiplikation.
Die (n + m)-te Potenz von a ist identisch mit dem Produkt der n-ten
Potenz von a und der m-ten Potenz von a.
Die n-te Potenz der m-ten Potenz von a ist (nm)-te Potenz von a.
Die n-te Potenz des Produktes von a und b ist gleich dem Produkt der
n-ten Potenz von a und der n-ten Potenz von b.
2
1 Grundlagen der Vektorraumtheorie
Die im nachfolgenden entwickelten Begriffe und herausgearbeiteten Eigenschaft der Vektorraumtheorie erfahren erst in einem späteren Abschnitt, der lineare Gleichungssysteme und deren Lösbarkeit diskutiert,
ihre Motivation.
Auch der Vektorraum ist eine Struktur die altbekanntes abstrahiert.
Vektoren kommen erstmals in Newtons Philosophiae Naturalis Principia Mathematica im Jahre 1687 vor und werden als gerichtete Strecke
definiert. Da es neben den aus der Physik bekannten Vektoren noch eine
ganze reihe anderer (mathematischer) Objekte gibt, die einen Umgang
wie mit physikalischen Vektoren erlauben, führt man verallgemeinernd
den Begriff des Vektorraums ein, wobei die Elemente der Menge, auf
der eine Vektorraumstruktur definiert wird, Vektoren heißen.
Nach [Koe03] treten erstmals 1827 in August Ferdinand Möbius‘ „barycentrischen Calcul” mathematische Objekte in Erscheinung, die ein
Rechnen ähnlich wie mit Vektoren zulassen. Im Jahre 1844 erscheint
eine erste Fassung der Grassmannschen Ausdehnungslehre von Hermann Günther Grassmann, in der Begriffe entwickelt werden, die man
aus einem modernen Blickwinkel mit den Begriffen wie Vektorraum,
Skalarprodukt usw. in Verbindung bringen kann.
11
Lies: Produkt von i gleich 1 bis n über ai
Repetitorium
23
lineare Algebra
1 Vektorraumtheorie
D 44
Rechnen im Vektorraum
Sei K ein Körper. Ein Vektorraum V über K12 ist ein Tripel (V, +, ·)
bestehend aus der Menge V, der zweistelligen Operation + auf V und
der Operation · : K × V → V von K auf V. Die Operation + heißt
(Vektor)Addition und die Operation ·, in der K auf V operiert, heißt
Skalarmultiplikation.
V 44.1 Die Addition ist assoziativ und kommutativ.
V 44.2 Bezüglich der Addition existiert ein neutrales und ein inverses
Element.
V 44.3 Es besteht ein linkes Distributivgesetz, das besagt, dass das
Skalarprodukt aus der Summe zweier Skalare a, b und einem Vektor v identisch ist mit der Summe der beiden Skalarprodukte av
und bv.
Außerdem besteht noch ein rechtes Distributivgesetz, das besagt, dass das Skalarprodukt von einem Skalar a und der Summe
zweier Vektoren u und v identisch ist mit der Summe der beiden
Skalarprodukte au und av.
V 44.4 Die skalare Multiplikation ist assoziativ, d.h das Skalarprodukt
von dem Produkt zweier Skalare a, b und dem Vektor u ist identisch mit dem Skalarprodukt von dem Skalar a und dem Skalarprodukt bu.
V 44.5 Das Skalarprodukt des neutralen Elements der Multiplikation
des Körpers und einem Vektor ergibt den Vektor.
2
S 20
Da an die vektorielle Addition die gleichen Anforderungen gestellt werden wie an die Addition im Körper lässt sich hier analog die Eindeutigkeit des neutralen Elements und des jeweiligen inversen Elements der
Addition zeigen.
2
D 45.1
Was wiederum Anlass gibt zur Definition der Null13 als Bezeichnung
für das neutrale Element der Addition deren formale Darstellung auch 0
ist. Wobei zu beachten ist, dass die Null eines Vektorraums ein anderes
Objekt als die Null eines Körpers ist.
Auch heißt das additive Inverse eines Vektors v das Negative von v und
wird mit −v symbolisiert. Abkürzend definiert man wieder v − w :=
v + (−w) mit v, w ∈ V, die Differenz von v und w und bezeichnet v
als Minuend und w als Subtrahend.
2
D 45.2
12
13
man spricht auch von einem K-Vektorraum
Man spricht auch vom Nullelement oder dem Nullvektor
Repetitorium
24
lineare Algebra
1 Vektorraumtheorie
Rechnen im Vektorraum
1.1 Rechnen im Vektorraum
S 21
Wie bereits bemerkt ist die Addition eines Vektorraumes identisch mit
der eines Körpers. Es gelten also alle Aussagen über die Körperaddition
auch für die Vektoraddition. Also gilt das allgemeine Assoziativ- und
Kommutativgesetz für endlich viele Vektoren.
2
D 46
Auch lässt sich das n-Fache von v in V wieder rekursiv definieren mit
mv := 0 und (m + 1)v := mv + v und somit
Pn
mv = i=1 v = v| + ·{z
· · + v} .
n−Summanden
2
S 22.1
S 22.2
S 22.3
S 22.4
Die elementaren Rechenregeln über Summen lassen sich ebenso adaptieren wobei nun v1 , . . . , vn , . . . , vn+m aus V sind und a, a1, . . . , an ∈ K.
Summen über Vektoren lassen sich zerlegen
Pn+m
Pn
Pn+m
i=1 vi =
i=1 vi +
i=n+1 vi .
Eine Summe über eine Addition lässt sich in eine Addition von Summen
über die Summanden zerlegen
Pn
Pn
Pn
i=1 (vi + wi ) =
i=1 vi +
i=1 wi .
Eine Summe über eine Differenz lässt sich in eine Differenz der Summe
über den Minuend und der Summe über den Subtrahend zerlegen
Pn
Pn
Pn
i=1 (vi − wi ) =
i=1 vi −
i=1 wi .
Schließlich gilt auch ein allgemeines Distributivgesetz
P
Pn
Pn
Pn
a n
i=1 vi =
i=1 avi ,
i=1 ai v =
i=1 ai v.
2
In Anlehnung der Nullteilerfreiheit eines Körpers lässt sich die folgende
Aussage über Vektorräume formulieren.
S 23
S 24.1
S 24.2
Ein Skalarprodukt ist identisch mit dem Nullvektor genau dann, wenn
der Skalar oder der Vektor Null ist.
2
Analog zum Körper lassen sich die folgenden Rechenregeln für Vorzeichen und Vielfache ableiten.
Das Skalarprodukt des neutralen Elements der Addition eines Körpers
und eines beliebigen Vektors, ist das neutrale Element der Addition des
Vektorraums.
Das Negative des Negativen eines Vektors ist der Vektor selbst.
S 24.4
Das Negative einer Vektoraddition von v und w ist die Differenz von
−v und w.
Die Differenz von 0V und v ist das Negative von v.
S 24.5
Das n-Fache des Nullvektors ist der Nullvektor.
S 24.3
Repetitorium
25
lineare Algebra
1 Vektorraumtheorie
S 24.6
S 24.7
S 24.8
S 24.9
Rechnen im Vektorraum
Das −1-Fache eines Vektors ist das Negative dieses Vektors.
Das (n + m)-Fache eines Vektors ist gleich der Summe vom n und
m-Fachen dieses Vektors.
Das (nm)-Fache eines Vektors ist identisch mit dem n-Fachen des mFachen dieses Vektors.
Das m-Fache der Summe zweier Vektoren ist gleich der Summe des
jeweiligen m-Fachen dieser beiden Vektoren.
S 24.10
Das Skalarprodukt von dem m-Fachen eines Skalars und eines Vektors
ist identisch mit dem Skalarprodukt von dem Skalar und dem m-Fachen
des Vektors.
S 24.11
Das Skalarprodukt von a und dem Negativen eines Vektors v ist sowohl
gleich dem Skalarprodukt von negativem a und v als auch gleich dem
Negativen des Skalarprodukts von a und v.
Das Skalarprodukt von negativem Skalars und negativem Vektor ist
identisch mit dem Skalarprodukt von diesem Skalar und diesem Vektor.
Die Skalarprodukte zweier Vektoren mit dem gleichen Skalar sind identisch genau dann, wenn der Skalar Null ist oder wenn die beiden Vektoren identisch sind.
2
Einer der wichtigsten Vektorräume ist der n-dimensionale Spalten(!
a1
Vektor-)raum über K, dessen Namen sich von den Elemen.
ten der Menge ableitet, auf der er definiert ist. Die Vektoren v = ..
an
sind n-Tupel die als Spalte geschrieben werden, wobei die
a1 , . . . , an beliebige Elemente aus K sind. Analog zur Gleichheit von
n-Tupeln bezeichnet man zwei Spaltenvektoren als gleich, wenn sie in
jeder Komponente übereinstimmen.
S 24.12
S 24.13
D 47.1
Die Menge aller n-Tupel über K heißt Kn und wird formal definiert
!
a1
durch Kn := { ... | ai ∈ K für 1 6 i 6 n}
an
D 47.2
Weiter kann man eine als Addition bezeichnete Operation auf Kn komponentenweise definieren.
a1
..
.
an
!
b1
+
..
.
bn
!
a1 +b1
=
..
.
an +bn
!
D 47.3
Und schließlich lässt sich noch eine Operation von K auf Kn definieren
!
!
a1
aa1
die naheliegenderweise skalare Multiplikation ge.
..
.
nannt und ebenfalls komponentenweise ausgeführt a .. =
aan
an
wird.
2
S 25
Mit den Körpereigenschaften lässt sich zeigen, dass die Menge Kn mit
den gerade definierten Operationen, dem nebenstehenden Nullelement
Repetitorium
26
lineare Algebra
1 Vektorraumtheorie
Untervektorraum
und negativem Element eines beliebiges Element aus Kn , ein Vektor- 0Kn :=
raum über K ist.
01
..
.
0n
!
a1
, −
..
.
an
!
−a1
:=
..
.
−an
!
2
D 48
Der in S 25 konstruierte Vektorraum heißt der n-dimensionale Spalten(Vektor-)raum über K und wird mit Kn bezeichnet. Die Elemente der
zugrundeliegenden Menge Kn heißen n-dimensionale Spaltenvektoren
über K. Der Nullvektor wird auch (n-dimensionale) Nullspalte (über
K) genannt.
2
Offensichtlich sind die Teilmengen der reellen Zahlen(gerade), auf denen
sich ein Körper definieren lässt, ein Spezialfall der Menge Kn . Identifiziert man K1 mit K sind diese Körper auch (eindimensionale) Vektorräume. Da sich die Menge des Körper der komplexen Zahlen mit
der Menge der reellen Paare identifizieren lässt und diese Menge wiederrum ein Spezialfall der Menge Kn ist, bilden auch die Komplexen
Zahlen einen (zweidimensionalen) Vektorraum. Die Eigenschaft der Dimension eines Vektorraums wird im weiteren Verlauf noch präzisiert
und definiert.
Im weiteren dieses Abschnitts symbolisiert K einen Körper mit der
Menge K und V ein beliebiger Vektorraum über K auf der Menge V.
1.2 Untervektorraum
Möchte man mit einer nichtleeren Teilmenge U von V wie mit einem
Vektorraum arbeiten, muss diese abgeschlossen sein bezüglich der von
V induzierten Strukturen der Addition und Skalarmultiplikation.
D 49
U = (U, +, ·) mit U ⊂ V heißt Unter(vektor)raum 14 von V, wenn gilt
U 49.1 U ist nicht die leere Menge.
U 49.2 Für je zwei Vektoren aus U, ist auch die Summe dieser Vektoren
aus U.
U 49.3 Für einen Skalar aus K und einen Vektor aus U, ist auch deren
Skalarprodukt aus U.
2
S 26
Eine hierzu gleichwertige Formulierung ist:
Auf einer nichtleere Teilmenge U von V lässt sich genau dann ein Untervektorraum von V definieren, wenn für je zwei Vektoren aus U und
je zwei Skalare aus K auch die Summe der jeweiligen Skalarprodukte
aus U ist.
2
14
auch Teil(vektor)raum von V
Repetitorium
27
lineare Algebra
1 Vektorraumtheorie
Untervektorraum
S 27.1
Mit S 24.1, 24.6 folgt unmittelbar, dass auch der Nullvektor und zu jedem Vektor aus U auch sein Negatives in U liegt.
S 27.2
Mit der induzierten Addition und Multiplikation von V ist U ein Vektorraum dessen Nullvektor mit dem aus V übereinstimmt, und für jeden Vektor aus U ist das gebildete Negative mit dem in V gebildeten
Negativem identisch. Man sagt auch U trägt die induzierte Vektorraumstruktur.
2
D 50
Offensichtlich lassen sich auf den Teilmengen U = {0} und U = V
von V Unterräume definieren. Diese Unterräume heißen die trivialen
Unterräume von V , außerdem nennt man {0} den Nullraum von V 2
Im weiteren sei U ein Untervektorraum auf der Menge U. Jeder Untervektorraum von V wird künftig ohne weiteres als Vektorraum über K
aufgefasst.
Da in der Vektorraumtheorie Summen über Skalarprodukte eine wichtige Rolle spielen, ist es sinnvoll ihnen einen eigenen Namen zu geben.
Die (endliche) Summe von Skalarprodukten mit beliebigen Skalaren
Pn
i=1 ai vi mit n ∈ N, a1 , . . . , an ∈ K, v1 , . . . , vn ∈ V
D 51.1
heißt Linearkombination der verwendeten Vektoren und die verwendeten Skalare heißen Koeffizienten der Linearkombination.
D 51.2
D 51.3
S 28
Sind alle Koeffizienten einer Linearkombination Null, dann heißt die
Linearkombination trivial.
Ein Vektor heißt Linearkombination einer Menge von Vektoren, wenn
es eine Linearkombination dieser Vektoren gibt, die sich mit dem Vektor
identifizieren lässt. In diesem Falle sagt man auch v ist als Linearkombination der v1 , . . . , vn darstellbar.
2
Nun lässt sich eine Verallgemeinerung von S 26 formulieren.
Für beliebige Vektoren aus U, ist auch jede Linearkombination dieser
Vektoren aus U. (Beweis durch vollständige Induktion über die Anzahl
der Vektoren.)
2
Außerdem können mit Hilfe des Begriffs der Linearkombination Untervektorräume von V konstruiert werden. Bevor dieses mächtige Konstruktionswerkzeug eingeführt und untersucht wird, soll das Verhalten von Untervektorräumen bezüglich der Mengenoperationen Durchschnitt und Vereinigung und Differenz betrachtet werden.
Schneidet man die Mengen zweier Untervektorräume U, U 0 eines Vektorraumes, dann ist mit S 27.1 der Nullvektor aus dem Durchschnitt,
also ist dieser nicht leer. Per Definition des Durchschnitts D 5.1 sind
zwei Vektoren aus dem Durchschnitt insbesondere sowohl aus U als
auch aus U 0 und damit liegt auch die Summe dieser Vektoren sowohl
Repetitorium
28
lineare Algebra
1 Vektorraumtheorie
Untervektorraum
in U als auch in U 0 und damit auch im Durchschnitt. Analoges gilt für
das Skalarprodukt eines beliebigen Skalar mit einem Vektor aus dem
Durchschnitt.
Mit S 27.1 sieht man sofort, dass der Nullvektor nicht in U\U 0 liegt.
Ist U eine Teilmenge von U 0 oder U 0 eine Teilmenge von U, ist die
Vereinigung von U und U 0 entweder U oder U 0 , also ein Untervektorraum.
Ist weder U eine Teilmenge von U 0 noch U 0 eine von U, dann existiert
die Vektoren u ∈ U\U 0 und u 0 ∈ U 0 \U, und damit U∪U 0 ein Unterraum
ist muss gelten u + u 0 ∈ U ∪ U 0 . Wenn aber (u + u 0 ) aus U ist dann
müsste auch (u + u 0 ) − u = u 0 aus U sein und Analog müsste für
(u + u 0 ) ∈ U 0 auch (u + u 0 ) − u 0 = u aus U 0 sein. Beides widerspricht
aber der Voraussetzung u ∈ U\U 0 , u 0 ∈ U 0 \U und damit kann die
Summe von u und u 0 nicht in der Vereinigung von U und U 0 liegen.
Zusammengefasst gilt:
S 29.1
Auf der Schnittmenge der Mengen zweier Unterräume eines Vektorraumes lässt sich also ein Untervektorraum definieren15 .
S 29.2
Auf der Vereinigung der Mengen zweier Unterräume eines Vektorraums
lässt sich genau dann ein Unterraum definieren, wenn eine der Beiden
Teilmenge der anderen ist (⇒ sonst nicht).
Auf der Differenz der Mengen zweier Unterräume eines Vektorraums
lässt sich in keinem Falle ein Unterraum definieren.
2
Als Ersatz für die Vereinigung zweier Untervektorräume definiert man
die Menge
S 29.3
D 52
S 30
U + U 0 := {(u + u 0 ) ∈ V | u ∈ U, u 0 ∈ U 0 }
genannt die Summe von U und U 0
2
Da 0 ∈ U ∪ U 0 ist U + U 0 nicht leer und wegen
a1 (u1 + u10 ) + a2 (u2 + u20 ) = (a1 u1 + a2 u2 ) + (a1 u10 + a2 u20 ) ∈ U + U 0
folgt, dass sich ein Unterraum auf U + U 0 definieren lässt16 .
2
Ist jedes Element von U + U 0 eindeutig darstellbar, dann gilt (*) für
alle u aus U und u 0 aus U 0 dass u + u 0 = 0 die Identität u = u 0 = 0
Impliziert. Setzt man nun (*) und u ∈ U∩U 0 voraus, dann gilt u+u 0 = 0
mit u ∈ U, u 0 := −u ∈ U 0 und (*) ergibt u = u 0 = 0, also U ∩ U 0 ⊂ {0}.
Mit S 27.1 folgt dann dass U ∩ U 0 der Nullraum ist. Geht man nun von
der letzten Folgerung aus und möchte eine Vektor v aus U + U 0 auf zwei
Weisen u + u 0 , w + w 0 mit u, w ∈ U und u 0 , w 0 ∈ U 0 darstellen, dann
Analog kann man dies auch für den Schnitt einer Familie von Unterraummengen
zeigen
16
Dies lässt sich für Unterräumen U1 , . . . , Un mit n ∈ N verallgemeinern
15
Repetitorium
29
lineare Algebra
1 Vektorraumtheorie
S 31
D 53
Untervektorraum
folgt u−w = u 0 −w 0 und damit dass beide Seiten aus dem Durchschnitt
von U und U 0 sind. Was wiederum u−w = 0 = u 0 −w 0 , also u = w, u 0 =
w 0 impliziert. Damit ist jedes Element von U+U 0 eindeutig darstellbar.
In einem Satz zusammengefasst lautet dieser Ringschluss dann, dass für
die Untervektorräume U, U 0 eines Vektorraums V die folgenden Aussagen äquivalent sind.
(i)
⇐⇒ Jedes Element der Summe von U und U 0 ist eindeutig durch u+u 0
mit u ∈ U und u 0 ∈ U 0 darstellbar.
(ii)
⇐⇒ Ist die Summe von u ∈ U und u 0 ∈ U 0 Null, dann ist sowohl u
als auch u 0 Null.
(iii)
⇐⇒ Der Durchschnitt von U und U 0 ist der Nullraum.
2
Die Summe zweier Untervektorräume die eine (also alle) der Bedingungen aus S 31 erfüllen heißt direkte Summe17 und man schreibt
U ⊕ U 0 := U + U 0 .
S 32
U 0 heißt der zu U komplementäre Unterraum
2
Mit der nachfolgenden Begriffsentwicklung der linearen Hülle lässt sich
dann zeigen, dass U+U 0 der kleinste Untervektorraum ist, dessen Menge
U ∪ U 0 enthält.
Wie bereits angedeutet wird nun dargestellt wie mit Hilfe des Begriffs
der Linearkombination Untervektorräume von V konstruiert werden.
Es lässt sich nämlich zeigen, dass sich auf der Menge aller Linearkombinationen
P n
Lin(M) :=
i=1 ai vi | n ∈ N, ai ∈ K, vi ∈ M, i ∈ {1 6 i 6 n}
einer nichtleeren Teilmenge M von V stets einen Untervektorraum
von V definieren lässt der M enthält. Wegen der trivialen Linearkombination enthält Lin(M) wenigstens den Nullvektor, ist also nicht leer.
Unter Ausnutzung von S 22.2, des linken Distributivgesetzes V 44.3 und
der definitionsgemäßen Abgeschlossenheit der Addition eines Körpers
lässt sich die additive Abgeschlossenheit von Lin(M) zeigen. Schließlich
ist auch eine Skalarmultiplikation mit einer Linearkombination wieder
aus Lin(M). Ist der Skalar 0 ist das Skalarprodukt 0, also die triviale Linearkombination. Ist der Skalar nicht Null führt die Existenz des
Reziproken eines Skalars, die Kürzungsregel, V 44.5, der Umstand, dass
sich ein Faktor in eine Summe ziehen lässt und die definitionsgemäße Abgeschlossenheit der Körpermultiplikation zum Nachweis, dass die
Skalarmultiplikation mit einer Linearkombination wieder eine Linearkombination ist.
2
17
Diese Begriffsbildung lässt sich auf Unterräume U1 , . . . , Un mit n ∈ N ausdehnen
Repetitorium
30
lineare Algebra
1 Vektorraumtheorie
D 54
Untervektorraum
Legt man nun noch fest, dass die Linearkombination der Vektoren
der leeren Menge der Nullraum ist, also Lin(∅) := {0}, dann sind für
Lin(M) mit M ⊂ V die folgenden Bezeichnungen üblich.
Für eine Teilmenenge M von V heißt Lin(M) der von M erzeugte
Untervektorraum oder der von M aufgespannte Teilvektorraum von
V, manchmal auch die lineare Hülle von M in V.
Ist M = {v1 , . . . , vn } (n ∈ N0 ) dann definiert man
Lin(v1 , . . . , vn ) := Lin({v1 , . . . , vn })
und nennt diese den von den v1 , . . . , vn erzeugten Unterraum oder
den von den v1 , . . . , vn aufgespannten Teilraum von V
2
S 33
S 34.1
S 34.2
S 34.3
S 34.4
S 34.5
S 28 lehrt, dass jede Linearkombination von Vektoren die aus eine Unterraum sind in selbem liegen. Außerdem kann man zeigen, dass die
Vektoren, die einen Teilvektorraum erzeugen auch der Menge desselben angehören indem man für den i-ten Vektor der erzeugenden den
Koeffizienten der Linearkombination a1 v1 + · · · + an vn auf 1 setzt und
für die Übrigen auf 0.
Zusammenfassend kann man, die Transitivität der Teilmengenrelation
ausnutzend, für eine Teilmenge M und einen Untervektorraum U von V
bzw. V festhalten, dass M eine Teilmenge von U ist genau dann, wenn
2
die lineare Hülle von M auch Teilmenge von U ist18 .
Es lassen sich einige Rechenregeln zur linearen Hülle formulieren.
M, M 0 sind im Weiteren Teilmengen von V
Die lineare Hülle der leeren Menge lässt sich mit der linearen Hülle des
Nullvektors identifizieren.
Für eine beliebigen Vektor v aus V gilt Lin(v) = Kv := {av | a ∈ K}
Ist v aus M, dann ist v auch aus der lineare Hülle von M.
M ist Teilmenge der linearen Hülle von M.
Ist M Teilmenge von M 0 , ist auch die lineare Hülle von M Teilmenge
der linearen Hülle von M 0 .
S 34.6
M ist Untervektorraum von V gdw, M identisch ist mit der linearen
Hülle von M.
S 34.7
Die lineare Hülle der linearen Hülle von M ist identisch mit der linearen
Hülle von M.
Ist M eine Teilmenge der linearen Hülle von M 0 , dann ist die lineare
Hülle von M Teilmenge der linearen Hülle von M 0 .
2
0
Nun kann noch zur Summe von U und U nachgetragen werden, dass
ein beliebigen Vektor u aus U wegen u = u + 0 auch aus U + U 0 ist und
S 34.8
18
Den Fall M = ∅ nicht vergessen!
Repetitorium
31
lineare Algebra
1 Vektorraumtheorie
S 35
Erzeugendensystem
analoges gilt für einen Vektor aus U 0 , also gilt U ∪ U 0 ⊂ Lin(U ∪ U 0 ) ⊂
U + U 0 , da U + U 0 ein Unterraum ist. Umgekehrt entsteht jeder Vektor
v aus U + U 0 aus einer Linearkombination 1u + 1u 0 deren Vektoren aus
U ∪ U 0 sind, also sind die Vektoren aus U + U 0 aus der linearen Hülle
von U ∪ U 0 und somit gilt
für zwei Untervektorräume U, U 0 eines Vektorraums, dass
U + U 0 = Lin(U ∪ U 0 ).
2
1.3 Erzeugendensystem
D 55.1
D 55.2
D 55.3
D 56
S 36
Für eine Teilmenge von V, deren lineare Hülle den trivialen Unterraum
V erzeugt, führt man einen eigenen Namen ein.
Sei E eine Teilmenge von V. Ist die lineare Hülle von E identisch mit V,
dann heißt E Erzeugendensystem von V.
V heißt endlich erzeugt, falls ein endliches Erzeugensystem19 für V
existiert.
Man sagt V wird von den v1 , . . . , vn erzeugt, oder die v1 , . . . , vn erzeugen V , wenn {v1 , . . . , vn } ein Erzeugendensystem ist. Man sagt in
diesem Falle, V wird von n Vektoren erzeugt.
2
Um vom Erzeugendensystem die Brücke zum Begriff der Basis schlagen
zu können, ist es dienlich den Begriff des i-ten Einheitsvektors von Kn
zu definieren.
Der Spaltenvektor ei dessen i-te Komponente Eins ist und dessen übrigen Komponenten Null sind heißt der i-te Einheitsvektor von Kn ,
wobei 1 6 i 6 n.
2
n
Ein beliebiger Vektor aus K mit den Komponenten a1 , . . . , an lässt sich
dann als Summe der n Skalarprodukte darstellen, deren i-tes Skalar die
i-te Komponente ist und deren i-ter Vektor der i-te Einheitsvektor ist.
Man kann also festhalten, dass die Menge der Einheitsvektoren {e1 , . . . , en } ein Erzeugendensystem von
Kn ist und somit Kn ein endlich erzeugter Vektorraum ist.
a1
..
.
an
!
=
n
P
ai e i
i=1
2
S 37
Da die Elemente von U + U 0 durch die Linearkombinationen 1u + 1u 0
entstehen mit u aus U und u 0 aus U 0 , ist die Vereinigung von je einem
Erzeugendensystem des U und U 0 ein Erzeugendensystem des U + U 0 .2
19
siehe auch D 23.1
Repetitorium
32
lineare Algebra
1 Vektorraumtheorie
Lineare Unabhängigkeit und Basis
1.4 Lineare Unabhängigkeit und Basis
Der weitere Verlauf ist Motiviert von der Frage ob auch jeder Untervektorraum eines endlich erzeugten Vektorraums endlich erzeugt ist.
Wie später noch gezeigt wird, ist der Lösungsraum eines homogenen
linearen Gleichungssystem ein Untervektorraum des Kn .
Neben dem Erzeugendensystem ist für die obige Fragestellung und
für die lineare Algebra überhaupt die Eigenschaft der linearen Unabhängigkeit mehrerer Vektoren von zentraler Bedeutung.
D 57
Endliche viele (nicht notwendig verschiedene) Vektoren heißen genau
dann linear unabhängig, wenn nur die triviale Linearkombination den
Nullvektor ergibt D 51.2. Linear abhängig heißen sie genau dann, wenn
sie nicht linear unabhängig sind.
2
S 38.1
Wegen des allgemeinen Kommutativgesetzes S 21 ist nicht die Reihenfolge der Skalarprodukte für die lineare Abhängigkeit bzw. Unabhängigkeit entscheidend.
Da man eine Summe in zwei Summen zerlegen kann S 16.1 ergibt sich
sofort, dass die Vektoren v1 , . . . , vn linear abhängig sind, wenn es die
Vektoren v1 , . . . , vm mit 1 6 m 6 n sind.
Ist einer der untersuchten Vektoren der Nullvektor, dann sind sie offensichtlich linear abhängig, da sich vor den Nullvektor ein beliebiger
Skalar schreiben lässt. Sind zwei der Vektoren identisch ergibt die Differenz aus ihnen Null, also sind die Vektoren auch dann linear abhängig.
Ein einzelner Vektor ist genau dann linear unabhängig, wenn er vom
Nullvektor verschieden ist.
S 38.2
S 38.3
S 38.4
S 38.5
Zwei Vektoren sind linear abhängig, wenn einer der Vektoren der Nullvektor ist, oder wenn der eine Vektor ein skalares Vielfaches des anderen
Vektors ist.
2
Sind Vektoren v1 , . . . , vn linear abhängig, dann existiert ein ai , 1 6
i 6 n, das nicht Null ist und somit ist
a1 v1 +· · ·+an vn = 0 ⇔
a1
v +· · ·+ aai−1
vi−1 + aai+1
vi+1 +· · ·+ aani vn
ai 1
i
i
= vi
ein wohldefinierter Ausdruck und vi ist Element der linearen Hülle der
übrigen Vektoren.
Geht man nun davon aus, dass vi Element der linearen Hülle der übrigen
Vektoren ist, dann gilt per Definition S 32
Pi−1
Pn
Pi−1
Pn
vi = j=1 aj vj + j=i+1 aj vj ⇔ 0 = j=1 aj vj + j=i+1 aj vj + (−1)vi
also gibt es mit ai = −1 eine nichttriviale Linearkombination der Vektoren v1 , . . . , vn , die den Nullvektor ergibt. Es gilt also für ein n ∈ N
und v1 , . . . , vn ∈ V
Repetitorium
33
lineare Algebra
1 Vektorraumtheorie
S 39
Lineare Unabhängigkeit und Basis
v1 , . . . , vn sind genau dann linear abhängig, wenn einer der Vektoren
Element der linearen Hülle der Übrigen ist.
2
Vorausgesetzt die Vektoren v1 , . . . , vn ∈ V sind linear unabhängig
während die Vektoren v1 , . . . , vn , v linear Abhängig sind, dann lässt
sich die Äquivalenz folgern
Pn
P n ai
i=1 ai vi + av = 0 ⇐⇒
i=1 a vi = v ∈ Lin(v1 , . . . , vn ),
S 40
a muss ungleich Null sein da sonst aufgrund der linearen Unabhängigkeit von v1 , . . . , vn die Koeffizient a1 , . . . , an Null sein müssten, was
aber der linearen Abhängigkeit von v1 , . . . , vn , v wiederspräche. Damit
existiert das multiplikative Inverse a1 von a außerdem tun die Kürzungsregel und das allgemeine rechte Distributivgesetz ihr übriges. Geht man
Pn
Pn
davon aus, dass es zwei Linearkombinationen i=1 ai vi , i=1 bi vi gibt,
die v ergeben, wird man finden, dass die jeweiligen Koeffizienten identisch sind, also ai = bi .
Man kann also festhalten, dass sich v eindeutig als Linearkombination
von v1 , . . . , vn darstellen lässt, wenn v1 , . . . , vn linear unabhängig und
v1 , . . . , vn , v linear abhängig ist, womit v ∈ Lin(v1 , . . . , vn ) gilt.
2
Bevor der Begriff der Basis eingeführt werden kann, muss die lineare
Unabhängigkeit verallgemeinert werden.
D 58.1
M ⊂ V heißt linear unabhängig, falls entweder M die leere Menge
ist oder je endlich viele paarweise verschiedene Vektoren aus M linear
unabhängig sind.
D 58.2
M heißt linear abhängig, wenn M nicht linear unabhängig ist.
B ⊂ V heißt eine Basis von V genau dann, wenn B linear unabhängig
2
und ein Erzeugendensystem D 55.1 von V ist.
Demnach ist definitionsgemäß die leere Menge eine Basis des Nullraums.
Ein weiteres Beispiel sind die Mengen B := a mit a ∈ K\{0}; eine jede
von ihnen ist eine Basis des K1 Vektorraums über K.
Ist die Teilmenge B von V eine Basis, dann ist jeder Vektor v aus V eine Linearkombination der Vektoren aus B, da B ein Erzeugendensystem
ist, und damit sind wegen S 39 die Vektoren b1 , . . . , bn ∈ B und v linear
abhängig, also lässt sich mit S 40 v eindeutig als Linearkombination der
Vektoren aus B darstellen.
Setzt man nun aber voraus, dass sich ein beliebiger Vektor v aus V
eindeutig als Linearkombination der Vektoren aus B darstellen lässt,
dann ist B offensichtlich ein erzeugenden System. Da es nur eine Möglichkeit gibt, also die Triviale, den Nullvektor als Linearkombination der
Vektoren aus B darzustellen sind die Vektoren aus B linear unabhängig und in Verbindung mit der Eigenschaft Erzeugendensystem zu sein,
D 58.3
Repetitorium
34
lineare Algebra
1 Vektorraumtheorie
S 41
D 59
(∗)
S 42
S 43
Lineare Unabhängigkeit und Basis
also eine Basis von V. Dies führt zu dem nachstehenden Basiskriterium.
Die Vektoren v1 , . . . , vn ∈ V sind verschieden und bilden zu einer Menge
B zusammengefasst eine Basis von V genau dann, wenn jeder Vektor
aus V als eindeutige Linearkombination der Vektoren aus B darstellbar
ist.
2
!
n
a
1
Da sich jeder Vektor aus K eindeutig aus einer Lin
.. = P a e
j j
.
nearkombination der Einheitsvektoren e1 , . . . , en darj=1
an
stellen lässt, sind die Einheitsvektoren e1 , . . . , en eine
Basis des Kn .
Die Basis {e1 , . . . , en } des Kn heißt Standardbasis, Einheitsbasis oder
auch kanonische Basis des Kn
2
Sei E ein Erzeugendensystem von V, und B eine linear unabhängige
Teilmenge von E, deren Obermengen stets linear abhängig sind. Dann
folgt mit S 34.5, dass die lineare Hülle von B Teilmenge der lineare Hülle
von E ist. Mit S 34.3 sind alle Vektoren aus E die zugleich in B sind
auch aus Lin(B). Für jeden der übrigen Vektoren aus E gilt zusammen
mit den Vektoren aus B linear Abhängigkeit, also folgt mit S 40, dass
auch diese aus der linearen Hülle von B sind. Da also E Teilmenge der
linearen Hülle von B ist gilt wegen S 34.8, dass Lin(E) Teilmengen von
Lin(B) ist, und somit folgt V = Lin(E) = Lin(B). Damit ist B auch ein
Erzeugendensystem von V und ob seiner linearen Unabhängigkeit eine
Basis von V.
Mit den unter (∗) gemachten Voraussetzungen ist B eine Basis des Vektorraums V.
2
Ein zentraler Satz der linearen Algebra ist der Austauschsatz. Sein Inhalt ist, dass Vektoren eines Erzeugendensystems E eines Vektorraums
V ausgetauscht werden können durch Vektoren einer linear unabhängigen Teilmenge M von V, ohne dass E seine Eigenschaft verliert Erzeugendensystem zu sein.
Sei E ein Erzeugendensystem von V und M eine linear unabhängige
Teilmenge von V. Dann existiert eine Teilmenge E 0 von E mit den Eigenschaften
(i) E 0 vereinigt mit M ist ein Erzeugendensystem von V.
(ii) E 0 und M sind disjunkt.
(iii) Die Kardinalität von E ohne E 0 ist identisch mit der von M.
(iv) Die Kardinalität von M vereinigt E 0 ist identisch mit der von E.
2
Repetitorium
35
lineare Algebra
1 Vektorraumtheorie
Lineare Unabhängigkeit und Basis
Da in S 43 E = (E\E 0 ) ∪ E 020 gilt und wegen (i) M ∪ E 0 ein Erzeugendensystem ist, können die Vektoren aus E\E 0 in E durch die aus M
ersetzt werden ohne dass E die Eigenschaft Erzeugendensystem zu sein
verliert.
Wenn M und E 0 disjunkt sind dann entspricht die Kardinalität ihre Vereinigung der Summe ihrer jeweiligen Kardinalitäten. Kann die
Kardinalität von M durch die von E\E 0 ersetzt werden folgt, dass die
Kardinalität der Vereinigung von M und E 0 identisch ist mit der von
E, (iv) ergibt sich also aus (ii) und (iii).
(ii)
(iii)
|M ∪ E 0 | = |M| + |E 0 | = |E\E 0 | + |E| = |E|
(∗)
(3)
Also bleiben noch die Eigenschaften (i), (ii) und (iii) zu zeigen. Für
den Fall M ⊂ E kann man E 0 = E\M setzen und sieht, dass E 0 die
geforderten Eigenschaften hat. Anschaulich wird hier gezeigt, dass M
durch M austauschbar ist falls M ⊂ E gilt.
Der allgemeine Fall kann mit vollständige Induktion über die Kardinalität von M gezeigt werden.
Geht man im Induktionsanfang von n = 0, also M = ∅ ∈ E kommt
(∗) zum Zuge.
Den Induktionsschritt vollzieht man praktischerweise von n − 1 nach
n wobei n > 0 gilt.
Für die Induktionsvoraussetzung gilt damit, dass es zu einer beliebigen
linear unabhängigen Menge21 der Kardinalität n−1 eine Menge mit den
Eigenschaften (i)–(iii) gibt.
Weiterhin gilt M 6⊂ E, da der gegenteilige Fall schon in (∗) abgehandelt wurde. Damit folgt aber, dass es in einem linear unabhängigen
M der Kardinalität n wenigstens ein Element m gibt, dass nicht in
E ist und aufgrund der Induktionsvoraussetzung gibt es zu der Menge
M1 := M\{m} – die offensichtlich die Kardinalität n − 1 hat – eine
Menge E10 mit den Eigenschaften von (i) bis (iii). Da M als linear unabhängig vorausgesetzt war, ist m nicht durch eine Linearkombination
der Vektoren aus M1 darstellbar, da M1 ∪ E10 ein Erzeugendensystem
ist, ist m als Linearkombination der Vektoren aus M1 ∪ E10 darstellbar
m = a1 m1 + · · · + an−1 mn−1 + b1 v1 + · · · + bk vk mit ai , bi ∈ K, mi ∈ M1 , vi ∈ E10 ,
also muss einer der Linearkoeffizienten der Vektoren aus E10 von Null
verschieden sein. Setzt man nun E 0 auf E10 ohne den Vektor vi dessen Linearkoeffizient von Null verschieden ist, dann erhält man das
gewünschte E 0 zu M.
(E\E 0 ) ∪ E 0 ⇒ (x ∈ E ∧ x 6∈ E 0 ) ∨ x ∈ E 0 ⇒ (x ∈ E ∨ x ∈ E 0 ) ∧ (x 6∈ E 0 ∨ x ∈ E 0 ) ⇒
E 0 ⊂E
x ∈ E ∨ x ∈ E 0 =⇒ x ∈ E
21
die während des Induktionsschrittes zu fixieren ist
20
Repetitorium
36
lineare Algebra
1 Vektorraumtheorie
Lineare Unabhängigkeit und Basis
Denn M ∪ E 0 ist eine Teilmenge von Lin(M1 ∪ E10 ), da M1 ∪ E10 ein
Erzeugendensystem ist. Weiter folgt aus (3) und der Existenz von vi
vi =
a1
vi m 1
+···+
an−1
vi
+
−1
vi m
+
b1
vi v 1
+···+
bi−1
vi vi−1
+
bi+1
vi vi+1
+··· +
bk
vi v k
und damit, dass M1 ∪ E10 Teilmenge von Lin(M ∪ E 0 ) und Lin(M ∪ E 0 )
somit auch ein Erzeugendensystem von V ist. (ii) lässt sich über einen
Widerspruchsbeweis zeigen, der Voraussetzt M und E 0 wären nicht disjunkt. (iii) kann man unter Ausnutzung von |M1 | = |E\E10 | aus der
Induktionsvoraussetzung, |E10 | = |E 0 | + 1 aus der Definition von E 0 und
E 0 ⊂ E10 ⊂ E nachrechnen
|M| = n − 1 + 1 = |M1 | + 1 = |E\E10 | + 1 = |E\E 0 |.
S 44
Eine unmittelbare Folgerung des Austauschsatzes ist, dass eine linear
unabhängiger Menge M eines endlich erzeugten Vektorraums wieder
endlich ist und M höchstens so viele Elemente enthält, wie ein beliebiges
Erzeugendensystem von V.
2
Nach diesen Vorbereitungen lassen sich einige Folgerungen über eine
Basis eines endlich erzeugten Vektorraumes V aufschreiben.
S 45.1
S 45.2
S 45.3
S 45.4
S 45.5
S 45.6
Da eine Basis B linear unabhängig ist und ein endliches Erzeugendensystem E für V existiert, ist mit S 44 jede Basis von V endlich.
Per Definition D 58.3 ist eine Basis linear unabhängig und ein Erzeugendensystem22 . Dann gilt mit S 44 für zwei Basen B, B 0 von V sowohl
|B| 6 |B 0 | als auch |B 0 | 6 |B| und damit folgt |B| = |B 0 |. Zwei Basen von
V enthalten also stets gleichviele Elemente.
Ist M eine linear unabhängige Teilmenge von E und E ein endliches
Erzeugendensystem von V, wobei E die Kardinalität k habe. Dann ist
die Kardinalität einer jeden linear unabhängigen Menge höchstens k
und es kann die Existenz einer linear unabhängigen Menge B gefordert
werden mit M ⊂ B ⊂ E und der größt möglichen Anzahl von Elementen,
so dass jede echte Obermenge von B in E linear abhängig ist. Dann ist
B mit S 42 eine Basis von V. Unter den gemachten Voraussetzungen
existiert also eine Basis B von V mit M ⊂ B ⊂ E.
Setzt man in S 45.3 E := V folgt unmittelbar, dass sich jede linear
unabhängige Teilmenge von V zu einer Basis ergänzen lässt.
Mit M := ∅ in S 45.3 gilt offensichtlich, dass es zu jedem Erzeugendensystem von V eine Basis B von V gibt mit B ⊂ E.
Und last but not least ist mit M := ∅, E := V in S 45.3 die Existenz
wenigstens einer Basis von V gesichert.
2
22
In diesem Falle sogar ein endliches!
Repetitorium
37
lineare Algebra
1 Vektorraumtheorie
Dimension eines Vektorraumes
1.5 Dimension eines Vektorraumes
D 60
Nach den Vorbereitungen in diesem Abschnitt kann der für die gesamte
Mathematik bedeutende Begriff der Dimension eingeführt werden.
Sei V endlich erzeugt. Dann sichert S 45.6 die Existenz einer Basis B,
die wegen S 45.1 endlich ist und deren Kardinalität n dank S 45.2 von
der Wahl der Basis unabhängig ist. n heißt dann Dimension von V
dim V := dimK V := |B| bzw. dim V := dimK V := ∞,
D 61
S 46
falls |B| = ∞ also V nicht endlich erzeugt ist, außerdem setzt man noch
dim{0} = 0.
2
Ein Vektorraum heißt endlich-dimensional oder er hat endliche Dimension, falls er endlich erzeugt ist. Anderenfalls heißt er unendlichdimensional oder hat unendliche Dimension.
2
Damit folgt für einen endlich erzeugten Vektorraum V und eine beliebige Teilmenge B von V die Äquivalenz der folgenden Aussagen.
(i)
⇐⇒ B ist eine Basis von V.
(ii)
⇐⇒ B ist maximal linear unabhängig, also alle echte Obermengen
von B sind linear abhängig.
(iii)
⇐⇒ B ist ein minimales Erzeugendensystem von V, also jede echte
Teilmenge von B ist kein Erzeugendensystem von V.
2
Berücksichtigt man die Definition der Dimension und die Existenz der
Standardbasis des Kn D 59 dann gilt:
S 47
Die Dimension des n-dimensionalen Spaltenraums über K ist n.
2
n
womit nun auch der Name des K gerechtfertigt ist. Außerdem kann
ein weiteres nützliches Basiskriterium formuliert werden.
S 48
Sei V endlich-dimensional, n := dim V und B ⊂ V. Dann bedingen zwei
der folgenden Aussagen die dritte
(i) B ist linear unabhängig.
(ii) B ist eine Erzeugendensystem von V
(iii) B besteht aus n Elementen.
und insgesamt implizieren sie, dass B eine Basis ist.
S 49
2
In Anlehnung an den Austauschsatz S 43 kann unter dem Eindruck von
S 48 der Steinitzscher Austauschsatz formuliert werden.
Ist B eine Basis eines endlich-dimensionalen Vektorraums V und M eine
linear unabhängige Teilmenge von V. Dann existiert eine Teilmenge B 0
von V, so dass M ∪ B 0 eine Basis von V ist und M ∩ B 0 = ∅ gilt.
2
Ist V endlich-dimensional und die Dimension kleiner oder gleich d (aus
N0 ). Dann hat eine Basis von V wegen D 60 höchstens d Elemente. Da
Repetitorium
38
lineare Algebra
1 Vektorraumtheorie
Dimension eines Vektorraumes
eine Basis per Definition ein Erzeugendensystem ist, hat wegen Satz
S 45.3 jede linear unabhängige Menge höchstens d Elemente und somit
ist jede Menge mit der Kardinalität d + 1 linear abhängig.
Ist andererseit jede Teilmenge eines Vektorraums mit d + 1 Elementen
linear abhängig, dann kann man der Menge aller natürlichen Zahlen n
für die gilt, dass je n + 1 Vektoren aus V linear abhängig sind, ihr Minimum m entnehmen23 . Ist m Null ist jeder Vektor aus V linear abhängig
womit V nur noch der Nullraum sein kann mit der Dimension 0. Ist m
größer als Null, dann ist m − 1 zwar aus N0 aber kein Element der
Menge der m entnommen Wurde. Damit gibt es m Vektoren v1 , . . . , vm
aus V, die linear unabhängig sind und da jede echte Obermenge n + 1
Elemente enthält, die voraussetzungsgemäß linear abhängig sind; also
ist nach S 42 mit E = V die Menge {v1 , . . . , vm } eine endliche Basis von
V und V damit endlich-dimensional mit der Dimension m.
S 50
Also ist ein Vektorraum genau dann endlich-dimensional mit
dim V 6 d ∈ N0 ,
wenn je d + 1 Vektoren aus V linear abhängig sind
S 51
S 52
2
Nun kann auch eine Antwort gegeben werden, auf die am Anfang des
Abschnittes 1.4 gestellte Frage. Denn ist ein Vektorraum V endlichdimensional mit der Dimension n, dann sind je n + 1 Vektoren aus
V linear abhängig. Also sind insbesondere aus der Menge U eines Untervektorraumes von V n + 1 Vektoren linear abhängig. Da U auch ein
Vektorraum ist folgt aus dem vorhergehenden Satz, dass dim U 6 dim V,
also ist U endlich erzeugt.
Ist U der Unterraum eines endlich-dimensionalen Vektorraums V, dann
ist U endlich-dimensional und es gilt dim U 6 dim V.
2
Weiter lässt sich mit dem Dimensionsbegriff noch ein Identitätskriterium für eine Vektorraum und einen seiner Unterräume ableiten. Denn
gilt n := dim U = dim V, dann hat eine Basis B von U n Elementen
und ist selbstverständlich linear unabhängig. Mit S 48 folgt dann, dass
B auch eine Basis von V ist, also U = Lin(B) = V gilt.
Somit kann man festhalten, dass ein Vektorraum genau dann mit einem
Unterraum identisch ist, wenn er die gleiche Dimension hat.
2
In Anlehnung an S 6.2 kann eine Dimensionsformel für die Summe
zweier endlichdimensionaler Unterräume U, U 0 entwickelt werden.
S 53
Zunächst sei festgehalten, dass der Unterraum auf U ∩ U 0 ⊂ U offensichtlich endlich dimensional ist. Da je eine Basis von U und U 0 endlich
23
Das Minimum existiert, da die Menge wenigstens d enthält
Repetitorium
39
lineare Algebra
1 Vektorraumtheorie
Dimension eines Vektorraumes
ist, ist die Vereinigung dieser Basen mit S 37 ein endliches Erzeugendensystem von U + U 0 . Damit ist auch die Basis von U + U 0 endlich und
mit D 60 ist schließlich U + U 0 endlich dimensional.
2
S 54.1
Die Dimensionsformel für endlich erzeugte Unterräume U, U 0 lautet
dim(U + U 0 ) = dim U + dim U 0 − dim(U ∩ U 0 )
S 54.2
Die Summe U + U 0 ist genau dann direkt wenn
dim(U + U 0 ) = dim U + dim U 0
2
Denn es Existiert eine endliche Basis BU∩U 0 = {u1 , . . . , ur } von dim(U∩
U 0 ), die sich zu den endlichen Basen BU = {u1 , . . . , ur , vr+1 , . . . , vs }
und BU 0 = {u1 , . . . , ur , wr+1 , . . . , wt } von U bzw. U 0 ergänzen lässt. Mit
S 6.1,6.2, D 60 gilt dann
|BU ∪ BU 0 | = |BU | + |BU 0 | − |BU ∩ BU 0 | = dim U + dim U 0 − dim(U ∩ U 0 ).
Wegen S 37 ist BU ∪ BU 0 ein Erzeugendensystem von U + U 0 . Kann noch
gezeigt werden, dass BU ∪ BU 0 linear unabhängig ist, dann ist BU ∪ BU 0
eine Basis von U + U 0 und S 54.2 wäre bewiesen.
(∗)
r
P
ai u i +
i=1
s
P
bj v j +
j=r+1
t
P
k=r+1
P
ck wk = 0 ⇐⇒
t
P
c k wk = −
k=r+1
r
P
ai u i −
i=1
s
P
j=r+1
bj v j ∈ U
Da also tk=r+1 ck wk in U und sowieso in U 0 liegt, ist es auch aus U ∩ U 0
also existieren geeignete a10 , . . . , ar0 so dass gilt
cr+1 wr+1 + · · · + ct wt = a10 u1 + · · · + ar0 ur
da aber u1 , . . . , ur , wr+1 , . . . , wt eine Basis von U 0 bilden, sind sie linear
unabhängig und die Linearkoeffizienten müssen alle Null sein. Setzt man
nun die rechte Seite in die linke Seite von (∗) ein, dann folgt
r
s
r
r
s
P
P
P
P
P
ai u i +
bj v j +
0uk = 0 ⇐⇒
(ai + 0)ui +
bj v j = 0
i=1
D 62
S 55.1
S 55.2
j=r+1
k=1
i=1
j=r+1
Da diese Linearkombination nur aus den Basisvektoren von U besteht,
sind diese linear unabhängig, was dazu führt, dass auch alle ai und bj
Null sein müssen. Also ist B ∪ B 0 linear unabhängig.
Um das hier gewonnene auf lineare Gleichungssysteme anwenden zu
können, ist es nützlich den Rangbegriff einzuführen.
Ist M eine Teilmengen eines endlich-dimensionalen K-Vektorraum, dann
heißt rang M := dim Lin(M) der Rang von M.
2
Zurückgreifend auf ähnliche Aussagen über die Dimension und ihrer
definierten Eigenschaften, kann man für zwei Teilmengen M, M 0 eines
endlich-dimensionalen Vektorraums V, einen Vektor w aus V und einem
m aus N0 die nachstehenden Folgerungen zeigen.
Der Rang von M verschwindet genau dann, wenn M die leere Menge
oder der Nullraum ist.
Der Rang von M ist höchstens so groß wie der von M 0 , vorausgesetzt
Repetitorium
40
lineare Algebra
1 Vektorraumtheorie
S 55.3
S 55.4
S 55.5
Lineare Abbildungen
M ist eine Teilmengen von M 0 .
Der Rang von M ist höchstens so groß wie die Dimension von V, wobei
genau dann Gleichheit besteht wenn M den Vektorraum erzeugt.
Der Rang von M ist identisch mit der maximalen Anzahl linear unabhängiger Vektoren aus M, welche jeden weiteren Vektor aus M eindeutig darstellen.
Ein Vektor ist genau dann aus der linearen Hülle von M, wenn sein
Hinzufügen zu M dessen Rang nicht verändert.
2
1.6 Lineare Abbildungen
Zum Abschluss der Vektorraumtheorie werden noch Abbildungen zwischen Vektorräumen betrachtet. Von besonderem mathematischen Interesse sind Abbildungen, die mit den Strukturmerkmalen24 verträglich
sind. Im Weiteren ist K wieder ein Körper und U, V, W beliebige Vektorräume über K.
D 63
Eine Abbildung f : V → W heißt linear, falls die folgenden Eigenschaften hat.
LA 63.1 Für alle Vektoren v, v 0 aus V gilt f(v + v 0 ) = f(v) + f(v 0 ).
LA 63.2 Für alle Skalare a ∈ K und Vektoren v ∈ V gilt f(av) = af(v).
Synonym zu linearer Abbildung werden auch die Bezeichnungen lineare
Transformation, linearer Operator oder (Vektorraum-)Homomorphismus verwendet.
2
Diese beiden Eigenschaften lassen sich zu einer Äquivalenzbedingung
für die Linearität einer Abbildung zusammenfassen.
S 56
S 57.1
S 57.2
S 57.3
S 57.4
f : V → W ist genau dann linear, wenn
f(av + a 0 v 0 ) = af(v) + a 0 f(v 0 ) für alle a, a 0 ∈ K, v, v 0 ∈ V
2
Außerdem lässt sich für eine lineare Funktion f : V → W noch Nachstehendes ableiten.
Wegen f(0) = f(0 + 0) = f(0) + f(0) folgt f(0) = 0.
Setzt man in LA 63.2 a = −1 dann folgt f(−v) = −f(v)
Mit einem Induktionsbeweis über m kann gezeigt werden, dass gilt
Pm
Pm
f( i=1 ai vi ) = i=1 ai f(vi ).
Ist U ein Unterraum von V, dann ist auch die Beschränkung D 13 von
f auf U linear.
2
Wichtige Beispiele für lineare Operatoren sind der Nullhomomorphismus von V in W OV,W : V → W, OV,W (v) := 0, die Identität, die
kanonische Injektion und die kanonische Projektion von Kn auf Km
24
Addition, Skalarmultiplikation
Repetitorium
41
lineare Algebra
1 Vektorraumtheorie
Lineare Abbildungen
mit m < n, siehe auch D 9. Das dies lineare Abbildungen sind lässt
sich leicht nachrechnen indem man entsprechend in die Definition oder
in S 56 einsetzt.
Ein wichtiges Gegenbeispiel ist die Translation mit w
tw : V → V, tw (v) := v + w für w 6= 0.
D 64
Verknüpft man zwei Homomorphismen in naheliegender weise mit
der Addition indem man die Bilder Addiert entsteht wieder eine Homomorphismus, mit dem Skalarprodukt bezüglich eines Homomorphismus
verfährt man ebenso und auch die Komposition zweier Homomorphismen ist wieder ein Homomorphismus25 .
Fast man nun die Menge aller Homomorphismen unter dem Bezeichnung homK (V, W) := Hom(V, W) := {f | f : V → W ist linear}
2
zusammen, dann lassen sich mit der eben eingeführten Summe von
Homomorphismen und dem Skalarprodukt von einem Skalar und einem
Homomorphismus
D 65
die Operationen Addition und skalare Multiplikation von Hom(V, W)
definieren
+ : Hom(V, W) × Hom(V, W) → Hom(V, W), +(f, g) := f + g
· : K × Hom(V, W) → Hom(V, W), ·(a, f) := af
S 58
S 59
2
Nun kann man nachrechnen, dass sich mit den gerade eingeführten
Operationen, dem Nullhomomorphismus und mit (−f)(v) := −f(v) als
dem Negativen von f ein Vektorraum über K auf Hom(V, W) definieren
lässt.
2
Eine Distributivgesetz bzw. Kommutativgesetzt bezüglich der Addition
bzw. skalaren Multiplikation und der Komposition ist auch gegeben. Sei
f1 , f2 , f3 ∈ Hom(V, W), g1 , g2 , g3 ∈ Hom(V, W)(U, V).
(i) f ◦ (g1 + g2 ) = f ◦ g1 + f ◦ g2 ,
(ii) (f1 + f2 ) ◦ g = f1 ◦ g + f2 ◦ g,
(iii) a(f ◦ g) = (af) ◦ g = f ◦ (ag).
2
Besonders ausgezeichnete Homomorphismen sind
D 66.1
zum einen der bijektive Homomorphismus von V auf W, der Isomorphismus von V auf W heißt. V heißt isomorph zu W, falls ein Iso∼ W.
morphismus von V in W existiert. Man schreibt V =
D 66.2
zum anderen ein Homomorphismus von V in V, der Endomorphismus
von V. Man setzt End(V) := Hom(V, V) .
2
f + g : V → W, (f + g)(v) := f(v) + g(v), af : U → W, (af)(v) := af(v) und
f ◦ g : V → W, (f ◦ g)(u) := f(g(u))
25
Repetitorium
42
lineare Algebra
1 Vektorraumtheorie
S 60.1
S 60.2
S 60.3
Lineare Abbildungen
Mit den in Abschnitt 0.2 eingeführten Begriffen und dargestellten Zusammenhängen lassen sich mit den gerade entwickelten Begriffen die
nachstehenden Folgerungen ableiten.
∼ V.
Die Identität ist ein Endomorphismus und ein Isomorphismus ⇒ V =
Die Komposition zweier Isomorphismen ist wieder ein Isomorphismus
∼ V, V =
∼ W⇒U=
∼ W.
⇒U=
Die Umkehrabbildung eines Isomorphismus ist auch ein Isomorphismus
∼ W⇔W=
∼ V.
⇒V=
2
Die Relation Isomorphie ist also reflexiv S 60.1, symmetrisch S 60.3
und transitiv S 60.2, also eine Äquivalenzrelation.
S 61
Ein bemerkenswertes Resultat ist, dass alle endlich-dimensionalen Vektorräume V mit n := dim V isomorph zum n-dimensionalen Spalten∼ Kn
raum Kn über K sind, also V =
2
!
a
1
Denn V hat eine Basis B = {v1 , . . . , vn } und man
n
.. ) := P a v
n
f(
j j
.
kann die Abbildung f : K → V mit nebenstehenj=1
an
der Abbildungsvorschrift definieren. Das f linear
ist lässt sich allgemein nachrechnen. Da das Basiskriterium S 41, 40
sicherstellt, dass ein Vektor aus V als Linearkombination der Basisvektoren aus B mit eindeutig bestimmten Linearfaktoren a1 , . . . , an
dargestellt wird, ist f bijektiv, womit S 61 bewiesen wäre.
1.6.1 Kern und Bild einer linearen Abbildung
D 67.1
D 67.2
S 62
Ziel ist es in diesem Abschnitt Begriffe wie Erzeugendensystem, lineare Unabhängigkeit und Basis mit linearen Abbildungen in Verbindung
zu bringen. Vor allem ist es interessant was mit der Dimension eines
Vektorraums geschieht, wenn auf ihn ein Homomorphismus angewendet
wird.
Zunächst wird die Menge aller Vektoren, die auf die Null abgebildet
werde als Kern von f definiert Kern f := {v ∈ V | f(v) = 0}.
Und die Menge aller Vektoren aus der Wertemenge, die abgebildet werden als Bild von f
Bild f := f(V) = {w ∈ W | ∃v ∈ V (f(v) = w)}.
2
Ist U ein Unterraum von V, dann gilt mit S 57.4 für f|U
Kern(f|U ) = (Kern f) ∩ U, Bild(f|U ) = f(U)
2
S 63
Da die Linearität strukturerhaltend ist kann man unter Ausnutzung
der Linearitätseigenschaften zeigen, dass sowohl der Kern als auch das
Bild einer linearen Abbildung ein Untervektorraum sind.
2
S 64
Eingedenk S 57.1 folgt dass der Kern einer injektiven linearen Abbildung f, der Nullraum ist; umgekehrt folgt aus der Linearität von f, dass
Repetitorium
43
lineare Algebra
1 Vektorraumtheorie
Lineare Abbildungen
f(v) = f(w) ⇔ f(v) − f(w) = f(v − w) = 0. Gilt nun noch Kern f = {0},
dann folgt v − w = 0 ⇔ v = w und damit ist f injektiv. Eine lineare
Abbildung ist also genau dann injektiv, wenn ihr Kern der Nullraum
ist.
2
Als nächstes soll die Frage beantwortet werden, was mit einem Erzeugendensystem und linear abhängigen bzw. unabhängigen Vektoren
{v1 , . . . , vn } der Definitionsmenge unter Einfluss einer linearen Abbildung f : V → W passiert. Ist v1 , . . . , vn ein Erzeugendensystem lässt
sich mit S 57.3 ein Bild von f als Linearkombination der Bilder von
Pn
Pn
v1 , . . . , vn darstellen w = f(v) = f( i=1 ai vi ) = i=1 ai f(vi ).
Nach ähnlichem Muster kann man mit den Sätzen S 57.1, 57.3 und dem
Ansatz 0 = f(0) zeigen, dass linear abhängige Vektoren v1 , . . . , vn aus
V auf linear abhängige Vektoren aus W abbilden.
Damit linear unabhängige Vektoren {v1 , . . . , vn } =: M auf linear unabhängige Vektoren f(M) abgebildet werden, muss noch die Injektivität
der Abbildung gefordert werden. Es muss also gezeigt werden, dass die
Linearkombination der Bilder f(M) nur im Falle der trivialen LinearP
kombination (D 51.2) verschwindet. Mit S 57.3 kann n
i=1 ai wi mit
Pn
P
n
f( i=1 ai vi ) mit vi ∈ M identifiziert werden. Also muss i=1 ai vi aus
dem Kern von f sein, der dank dem Injektivitätskriterium der Nullraum
Pn
ist. Somit muss gelten i=1 ai vi = 0, was unmittelbar das Verschwinden der Koeffizienten zur Folge hat, da die Vektoren v1 , . . . , vn linear
unabhängige sind. Zusammenfassend kann man also sagen, dass eine
lineare Abbildung
S 65.1
S 65.2
S 65.3
ein Erzeugendensystem der Definitionsmenge auf ein Erzeugendensystem des Bildes abbildet,
linear abhängige Vektoren der Definitionsmenge auf linear abhängige
Vektoren des Bildes abbildet und
linear unabhängige Vektoren der Definitionsmenge auf linear unabhängige Vektoren abbildet, falls der Homomorphismus injektiv ist.
2
S 66
Damit ergibt sich unmittelbar, dass ein Basis der Definitionsmenge eines injektiven Homomorphismus auf eine Basis des Bildes abgebildet
wird. Handelt es sich um einen Isomorphismus wird die Basis sogar auf
eine Basis der Wertemenge abgebildet.
2
S 67.1
Mit der Transitivität der Isomorphierelation, S 61 und dem vorstehenden Satz, ist ein endlichdimensionaler Vektorraum zu einem anderen
genau dann isomorph, wenn beide die gleiche Dimension haben.
S 67.2
Damit sind natürlich zwei verschiedendimensionale Spaltenvektorräume
nicht isomorph.
2
Repetitorium
44
lineare Algebra
1 Vektorraumtheorie
Lineare Abbildungen
Nun soll noch ein Zusammenhang zwischen dem Dimensionsbegriff und
dem Kern bzw. Bild eines Homomorphismus f, der auf einem endlichdimensionalen Vektorraum V definiert ist, hergestellt werden. Der Unterraum Kern f von V ist mit S 51 ebenso endlich-dimensional wie das
Bild f, dass mit S 65.1 durch eine Basis B von V mit f(B) endlich erzeugt
ist. Also existieren zwei Basen BK = {k1 , . . . , kp }, BB = {b1 , . . . , bq }. Für
jedes bj gibt es ein vj ∈ V mit f(vj ) = bj und k1 , . . . , kp , v1 , . . . , vq sind
linear unabhängig, denn es gilt mit S 57.3 und ki ∈ Kern f ⇒ f(ki ) = 0
0 = f(
p
P
a i ki +
i=1
q
P
cj vj ) =
p
P
ai f(ki ) +
j=1
i=1
j=1
q
P
cj f(vj ) =
q
P
cj f(vj ) =
q
P
c j bj .
j=1
j=1
Da die bj linear unabhängig sind impliziert dies das Verschwinden der
cj und die linearen Unabhängigkeit der ki erzwingt das Verschwinden
Pp
der ai , wenn i=1 ai ki = 0 gelten soll. Weiter kann man zeigen, dass
die k1 , . . . , kp , v1 , . . . , vq V erzeugen. Denn
f(v) =
S 68
S 69.1
S 69.2
S 69.3
D 68
Pq
j=1
c j bj =
Pq
j=1 cj f(vj )
= f(
Pq
j=1
cj vj ) und mit v 0 := v −
Pq
j=1 cj vj
folgt dann aufgrund der Linearität und der gerade gezeigten Identität
P
f(v 0 ) = f(v) − f( qj=1 cj vj ) = 0. Damit ist v 0 Element des Kerns und
lässt sich als linearkombination der k1 , . . . , kp darstellen, also gilt zuPp
Pq
sammenfassend v = i=1 ai ki + j=1 cj vj und {k1 , . . . , kp , v1 , . . . , vq }
ist eine Basis von V.
Ein Homomorphismus auf einem endlich-dimensionalen Vektorraum V
hat ein endlich-dimensionales Bild und einen endlich-dimensionalen
Kern deren aufsummierten Dimensionen die Dimension von V ergeben.2
Zusammen mit dem Injektivitätskriterium lässt sich unmittelbar für
endlich-dimensionale Vektorräume V und W schließen,
ist die Dimension von V größer als die von W, existiert keine injektive
lineare Abbildung von V in W.
ist die Dimension von W größer, existiert keine surjektive lineare Abbildung von V in W.
sind die Dimensionen gleich, sind die nachstehenden Aussagen für einen
Homomorphismus f von V in W äquivalent
(i)
⇐⇒ f ist injektiv
(ii)
⇐⇒ f ist surjektiv
(iii)
⇐⇒ f ist bijektiv
2
Nach diesen Vorbereitungen kann man einem Homomorphismus zwischen endlich-dimensionale Vektorräumen eine nicht negative ganze
Zahl zuordnen, die eine wichtige Rolle beim Lösen linearer Gleichungssysteme spielt.
Die Dimension des Bildes eines Homomorphismus zwischen endlichRepetitorium
45
lineare Algebra
2 Matrizen
dimensionale Vektorräumen heißt Rang von f. Man schreibt
rang f := dim Bild f = dim f(V)
S 70.1
S 70.2
S 70.3
S 70.4
S 70.5
S 70.6
S 71.1
S 71.2
2
Damit lassen sich einige gerade entwickelte Sätze für linearer Abbildung
umformulieren.
dim Kern f = dim V − rang f.
0 6 rang f 6 min(dim V, dim W).
rang OV,W = rang 0 = 0,
rang idV = dim V,
rang inU,V = dim U
und für p : Kn → Km mit m < n gilt wegen der Surjektivität der
Projektion rang p = dim Bild p = dimKm = m
2
Im Zusammenhang mit der Komposition lässt sich zeigen, dass folgendes für die beiden Homomorphismen f : V → W und g : U → V gilt.
Der Rang der Komposition von f und g ist identisch mit dem Rang
von f, das auf das Bild von g beschränkt ist und dieser ist wiederum Identisch mit der Differenz von g’s Rang und der Dimension des
Durchschnitts des Kerns von f und des Bildes von g.
Die Differenz der Summe der Ränge der beiden Homomorphismen und
der Dimension von V ist höchstens so groß wie der Rang der Komposition von f und g und dieser wiederum ist nicht größer als das Minimum
der Ränge von f und g.
2
2 Matrizen
Um mechanische Rechentechniken zur Bestimmung des Rangs eines
Systems m-dimensionalen Spaltenvektoren zu entwickeln, ist es nützlich
den Begriff der Matrix nebst zugehörigen Formalismus einzuführen. K
ist wie üblich ein Körper und m, n sind natürliche Zahlen.
D 69.1
Nebenstehendes rechteckiges Schema heißt Maa
...
a1n
11
.
..
.
trix vom Typ (m, n) oder m × n-Matrix über A =
.
.
. .
.
K mit beliebigen aij ∈ K mit 1 6 i 6 m,
am1
... amn
1 6 j 6 n. Abkürzend schreibt man auch
A = (aij )16i6m,16j6n oder falls es der Zusammenhang hergibt sogar A = (aij )i,j = (aij ).
D 69.2
Es heißt i der Zeilenindex und j der Spaltenindex von A.
aij heißt die (i, j)-Komponente oder die Komponente an der Stelle
(i, j) von A
D 69.3
D 69.4
Zwei Matrizen sind identisch, wenn sie gleichen Typs sind und in jeder
Komponente übereinstimmen.
Repetitorium
46
lineare Algebra
2 Matrizen
D 69.5
Die Menge aller m × n-Matrizen über einen Körper K wird formal mit
Matm,n (K) bezeichnet.
D 69.6
D 69.7
Eine Matrix vom Typ (m, 1) ist offensichtlich ein m-dimensionaler Spaltenvektor und Matm,1 (K) lässt sich mit dem m-dimensionalen Spaltenraum identifizieren. Analog definiert man den n-dimensionalen Zeilenraum Kn := Mat1,n (K) dessen Elemente n-dimensionaler Zeilenvektor über K heißen.
!
a1j
Ist A = (aij )ij aus der Menge aller n × m Matrizen,
.
..
dann ist der nebenstehende m-dimensionale Spaltenvek- vj :=
amj
tor die j-te Spalte von A. So dass sich jede Matrix als
n-Tupel ihrer Spalten(vektoren) schreiben lässt A = (v1 , . . . , vn ) und
jedes n-Tupel von m-dimensionalen Spaltenvektoren als Matrix vom
Typ (m, n).
D 69.8
Analoges gilt für die i-te Zeile einer m × n-Matrix A.
ui := (ai1 , . . . , ain ) ∈ Kn mit 1 6 i 6 m
D 69.9
D 69.10
D 69.11
heißt i-te Zeile bzw. der i-te Zeilenvektor von A. Eine Matrix lässt
sich also kanonisch als m-komponentige Spalte ihrer Zeilenvektoren auffassen und m n-dimensionale Zeilenvektoren fügen sich zu einer m × nMatrix.
Die aij = diag A mit i = j einer n × m-Matrix heißen Hauptdiagonale
von A
Die aij mit i < j 6 i + 1 6 n bzw. 0 < i − 1 6 j < i einer (n × m)
Matrix bilden die (obere bzw. untere) Nebendiagonale von A
Die Summe der Komponenten der Hauptdiagonale einer n × n-Matrix
2
A heißt Spur26 von A.
Es wird sich im Weiteren als praktisch erweisen, einige spezielle Matrizen mit einem eingenen Namen zu versehen.
D 70.1
Eine Matrix vom Typ (m, n) mit m = n heißt (n-reihig) quadratisch
man definiert Matn (K) := Matn,n (K)
D 70.2
Eine Matrix t A vom Typ (n, m), die aus der m × n-Matrix A durch
vertauschen von Zeilen- und Spaltenindizes entsteht, heißt die Transponierte, die transponierte Matrix oder auch die gespiegelte Matrix
von A. Von eine gespiegelten Matrix spricht man, weil man bei geeignetem Matrizentyp anstelle von Transponieren auch von Spiegeln an
der Hauptdiagonale sprechen kann.
Eine quadratische Matrix deren Komponenten nur in der Hauptdiago-
D 70.3
spur : Matn (K) → K, A 7→ spur A ist eine Linearform und es gilt spur(AB) =
spur(BA) sowie spur(ABC) = spur(ACB) ⇒ n = 1
26
Repetitorium
47
lineare Algebra
2 Matrizen
D 70.4
D 70.5
D 70.6
D 70.7
D 70.8
D 71.1
D 71.2
Vektorraum der Matrizen
nale von Null verschieden sind, nennt man Diagonalmatrix.
Eine n×m-Matrix deren Komponenten alle Null sind heißt Nullmatrix
(vom Typ (m, n)).
Eine Diagonalmatrix deren Komponenten in der Hauptdiagonale alle
Eins sind, wird die n-reihige Einheitsmatrix genannt.
Eine (n × m)-Matrix A, deren Komponenten aij nur für i 6 j 6 n
bzw. 1 6 j 6 i von Null verschieden sind, heißt obere bzw. untere
Dreiecksmatrix von A
Zerlegt man eine Matrix A vom Typ (m, n) in vier
A11 A12
Matrizen A11 ∈ Matr,s (K), A12 ∈ Matr,n-s (K), A := A
21 A22
A21 ∈ Matm-r,s (K), und A11 ∈ Matm-r,n-s (K),
dann nennt man A eine Blockmatrix der Stufe (r, s) mit 1 < r < m,
1 < s < n. Es ist zweckmäßig auch die Sonderfälle r = 0, r = m, s = 0
und s = n zuzulassen.
Eine Matrix Epq := Ep,q vom Typ (m, n), die in der p-ten Zeile und der
q-ten Spalte eine Eins und in den übrigen Komponenten eine Null stehen hat, heißt Matrizeneinheit aus Matm,n (K) oder vom Typ (m, n).
2
Der Begriff der Matrizeneinheit lässt sich mittels des Kronecker-Symbols
noch stärker formalisieren.
1 falls i = j,
Die Abbildung δ : N × N → {0, 1}, δij := δ(i, j) :=
heißt
0 falls i 6= j
Kronecker-Symbol oder auch Kronecker-δ.
Die für ganze p, q mit 1 6 p 6 m, 1 6 q 6 n definierten Matrizen
Epq := Ep,q := (δip δjq )16i6m,16j6n ∈ Matm,n (K)
D 71.3
heißen Matrizeneinheiten vom Typ (m, n)
n × n-Matrizen
(n)
Fλµ := Fλµ := 1n + Eλµ ,
(n)
Fλ (a) := Fλ
:= 1n + (a − 1)Eλλ
mit 1 6 λ, µ 6 n und λ 6= µ heißen Elementarmatrizen n-ten Grades
über K. Fλµ „ist” also eine Einheitsmatrix die in der (λ, µ)-ten Komponente eine Eins anstelle der Null stehen hat und Fλ eine Einheitsmatrix,
die in der (λ, λ)-ten Komponente ein a anstelle der Eins stehen hat. 2
2.1 Vektorraum Matm,n (K)
D 72.1
Man kann eine Summe zweier Matrizen A, B gleichen Typs festlegen
indem man die Summe der jeweiligen Komponenten bildet. A + B :=
(aij + bij )ij heißt dann Summe von A und B.
D 72.2
Analog lässt sich das n-Fache von A mit nA := (naij )ij definieren.
Repetitorium
48
lineare Algebra
2 Matrizen
Rang einer Matrix
Aufgrund der Abgeschlossenheit und Eindeutigkeit der Körperaddition
und -multiplikation lassen sich die Operationen
D 72.3
Addition durch die Abbildung
Matm,n (K) × Matm,n (K) → Matm,n (K), (A, B) 7→ A + B
D 72.4
und skalare Multiplikation durch die Abbildung
K × Matm,n (K) → Matm,n (K), (a, A) 7→ aA
D 72.5
definieren.
Zwei Blockmatrizen A, B vom Typ (n, m) der Stufe (r, s) addiert man
indem man die korrespondierenden Blöcke Aij , Bij addiert.
D 72.6
Ein Blockmatrix A vom Typ (n, m) der Stufe (r, s) multipliziert man
mit einem Skalar indem man die einzelnen Blöcke mit dem Skalar multipliziert.
2
S 72.1
Zurückgeführt auf die entsprechenden Körperoperationen kann man
nachrechnen, dass sich auf der Menge aller Matrizen vom Typ (m, n)
über K mit den unter D 72.3, 72.4 definierten Operationen ein Vektorraum definieren lässt. Wobei die Nullmatrix vom Typ (m, n), das Nullelement ist und (−aij )ij ∈ Matm,n (K) das Negative von A = (aij )ij ∈
Matm,n (K)
Man kann eine beliebige Matrix aus Matm,n (K) mit der Doppelsumme
Pm Pn
q=1 apq Epq identifizieren woraus folgt, dass
p=1
S 72.2
{Epq | 1 6 p 6 m, 1 6 q 6 n}
S 72.3
eine Basis von Matm,n (K) ist.
Die Dimension des Vektorraums aller Matrizen von Typ (m, n) ist das
Produkt von Zeilenanzahl und Spaltenanzahl.
2
2.2 Rang einer Matrix
D 73
S 73
D 74
Sei A eine Matrix vom Typ (m, n) und vj die j-te Spalte dieser Matrix.
Dann setzt man spaltenrang A := rang{v1 , . . . , vn } und bezeichnet dies
als Spaltenrang von A.
2
Dann gilt in Anlehnung an S 55.4
Das der Spaltenrang einer Matrix vom Typ (m, n) genau der maximalen Anzahl an linear unabhängiger Spaltenvektoren in {v1 , . . . , vn }
entspricht.
2
Analoges lässt sich natürlich auch für die Zeilen einer Matrix definieren
bzw. ableiten.
Sei A eine Matrix vom Typ (m, n) und ui die i-te Zeile dieser Matrix. Dann setzt man zeilenrang A := rang{u1 , . . . , um } und nennt dies
Zeilenrang von A.
2
Repetitorium
49
lineare Algebra
2 Matrizen
S 74
S 75.1
S 75.2
Elementare Matrizenumformungen
Und wieder gilt dann mit S 55.4
dass der Zeilenrang einer Matrix vom Typ (m, n) genau der maximalen Anzahl an linear unabhängiger Zeilenvektoren in {u1 , . . . , um }
entspricht.
2
Mittels des transponierten einer Matrix kann man einen Zusammenhang zwischen dem Zeilen- und dem Spaltenrang einer Matrix herstellen.
Definiert man eine Abbildung Transposition tm,n zwischen den Vektorräumen Matm,n (K) und Matn,m (K), die einer Matrix aus Matm,n (K)
ihr Transponiertes zuordnet, dann kann man die Bedingung S 56 nachrechnen, aus der die Linearität der Transposition folgt.
Die Position einer Matrixkomponente ist eindeutig durch zwei Indizes
bestimmt, die bei der Transposition vertauscht werden. Es ist naheliegend, dass ein abermaliges Vertauschen der Indizes eine Matrixkomponente wieder an ihren ursprünglichen Platz zurück befördert, dass also
eine zweimal transponierte Matrix wieder die ursprüngliche Matrix ist
t t
( A) = A.
S 75.3
Damit folgt dann, dass die Komposition von tn,m und tm,n die Identität
auf Matm,n (K) ist, genauso wie die Komposition von tm,n und tn,m
die Identität auf Matn,m (K) ist. Mit Satz S 4.7 folgt dann, dass die
Transposition bijektiv ist.
S 75.4
Zusammenfassend kann man also festhalten, dass die Abbildung
tm,n : Matm,n (K) −→ Matn,m (K),
ein Vektorraumisomorphismus ist.
S 75.5
S 76
D 75
(A) 7−→ t A
Mit S 65.1, 68 und diesem Ergebnis lässt sich ableiten, dass
zeilenrang A = spaltenrang t A, spaltenrang A = zeilenrang t A
2
Damit kann die zentrale Aussage dieses Abschnitts – die Ranggleichung
einer Matrix – formuliert werden.
Für jede Matrix vom Typ (m, n) gilt, dass ihr Spaltenrang mit dem
Zeilenrang identisch ist.
2
Womit der Rang einer Matrix definiert werden kann indem man für
eine Matrix A aus Matm,n (K) setzt
rang A := zeilenrang A = spaltenrang A
und dies mit Rang von A bezeichnet.
S 77
2
Mit S 75.5, 76 und der Rangdefinition ergibt sich der Zusammenhang
rang A = rang t A 6 min(m, n) für eine beliebige Matrix A aus dem
Vektorraum der Matrizen vom Typ (m, n) über K.
2
Repetitorium
50
lineare Algebra
2 Matrizen
Elementare Matrizenumformungen
2.3 Elementare Matrizenumformungen
Ist M := {v1 , . . . , vn } eine Teilmenge eines K-Vektorraumes und man
ersetzt einen der Vektoren vi aus M durch das Skalarprodukt von vi
und a ∈ K\{0} oder durch die Summe von vi und vj ∈ M, dann erhält
man Abwandlungen M 0 , M 00 von M die sich auf Linearkombinationen
der Vektoren aus M zurückführen lassen, also Lin(M 00 ) = Lin(M 0 ) =
Lin(M).
S 78
Für den Rang einer Menge von Vektoren {v1 , . . . , vn } gilt mit a ∈ K\{0}
rang {v1 , . . . , vk , . . . , vn } = rang {v1 , . . . , avk , . . . , vn }
D 76.1
rang {v1 , . . . , vk , . . . , vl , . . . , vn } = rang {v1 , . . . , vk + vl , . . . , vl , . . . , vn } 2
Nun kann man rangerhaltende elementare Zeilen- bzw. Spaltenumformungen von m × n-Matrizen definierten.
Jede dieser Operationen
EZU1: Addition zweier Zeilen,
EZU2: Multiplikation einer Zeile mit einem positiven oder negativen
Skalar,
EZU3: Addition einer Linearkombination von r Zeilen zu einer von
diesen verschiedenen Zeile.
EZU4: Vertauschung zweier Zeilen.
heißt elementare Zeilenumformung.
D 76.2
Das hintereinander Ausführen mehrerer elementarer Zeilenumformungen kann man zu einer iterierten elementaren Zeilenumformung zusammenfassen.
D 76.3
Analog zu den Zeilen heißt jede dieser Operationen
ESU1: Addition zweier Spalten,
ESU2: Multiplikation einer Spalte mit einem positiven oder negativen
Skalar,
ESU3: Addition einer Linearkombination von r Spalten zu einer von
diesen verschiedenen Spalte.
ESU4: Vertauschung zweier Spalten.
elementare Zeilenumformung.
D 76.4
Das hintereinander Ausführen mehrerer elementarer Spaltenumformungen kann man zu einer iterierten elementaren Spaltenumformung
zusammenfassen.
2
S 79
Man sieht, dass eine Matrix A 0 aus einer Matrix A genau dann durch
elementare Zeilenumformungen hervorgeht, wenn die Matrix tA 0 aus
elementaren Spaltenumformungen von tA hervorgeht.
2
Repetitorium
51
lineare Algebra
2 Matrizen
S 80
S 81
Elementare Matrizenumformungen
Mit einem Induktionsbeweis über die Anzahl der Zeilen r kann man
zeigen, dass EZU3 auf EZU1 zurückführbar ist. Der Induktionsanfang
mit r = 1 gilt offensichtlich, da die Addition einer Linearkombination
von einer Zeile nichts anderes ist als EZU2 und EZU1 hintereinander
ausgeführt. Ist bereits eine Linearkombination von r Zeilen auf EZU1
und EZU2 zurückgeführt, dann ist das Hinzufügen der r+1 Zeile wieder
durch hintereinander Anwenden von EZU2 und EZU1 zu realisieren,
womit der Induktionsschritt auch gezeigt wäre. Weiter lässt sich noch
nachrechnen, dass auch die vierte elementare Zeilenumformung durch
die ersten beide realisierbar ist. Seien ui , uj zwei verschiedene Zeilen
einer Matrix. Dann erhält man durch Addieren der j-ten Zeile zur i-ten
Zeile und dem anschließenden Multiplizieren der i-ten mit −1 die i-te
Zeile −(ui + uj ). Addiert man die aktuelle i-te Zeile zur j-ten ergibt
sich für die j-te Zeile −ui . Multipliziert man nun die i-te Zeile nochmals
mit −1 und addiert die aktuelle j-te Zeile hinzu ist die i-te Zeile uj . So
dass man nur noch die j-te Zeile mit −1 multiplizieren muss um in ihr
ui stehen zu haben. Also kann das vertauschen zweier Zeilen auch auf
EZU1 und EZU2 zurückgeführt werden. Unter Berücksichtigung S 79
kann festgehalten werden, dass
jede iterierte elementare Zeilen- oder Spaltenumformung auf EZU1 und
EZU2 bzw. ESU1 und ESU2 zurückführbar ist.
2
Die ranginvarianten Operationen aus S 78 könne mit EZU1 und EZU2
identifiziert werden. Damit kann man folgenden Invarianzsatz des Matrizenrangs bezüglich elementarer Matrizenumformungen aufschreiben.
Der Rang einer Matrix ist invariant bzgl. elementarer Umformungen.2
D 77
Definiert man nun noch den Begriff der iterierten Spaltenvertauschung
als das wiederholte Anwenden von ESU4,
2
S 82
dann hat man den Begriffsapparat um folgenden Äquivalenzaussage
über m × n Matrizen mit r aus N0 formulieren zu können.
(ii)
⇐⇒ Der Rang von A ist r.
(ii)
1
∗
···
∗
∗ ··· ∗
⇐⇒ Durch iterierte elementare Zei
.
.
.
.
.
.
.
.
.
.
lenumformungen und Spaltenver
.
.
0
.
.
.
s
. .
.
.
.
tauschungen kann A in eine Ma.
. . . . ∗ ..
..
.
trix A 0 aus Matm,n (K) transfor- A 0 =
0
···
0
1
∗ ··· ∗
miert werden mit
···
···
··· ··· ··· 0
0
0
rang A = s = rang A = r
.
.
.
.
(iii)
.
···
···
··· ··· ··· .
⇐⇒ Durch iterierte elementare Um0
···
···
··· ··· ··· 0
formungen kann A in eine Matrix
A 0 transformiert werden.
Repetitorium
52
lineare Algebra
2 Matrizen
Elementare Matrizenumformungen
(iv)
⇐⇒ Durch iterierte elementare Umformun
B =
gen kann A in eine Blockmatrix der neben0m−r,r 0m−r,n−r
stehenden Gestalt transformiert werden.
2
Der Beweis zu diesem Satz wird als Ringschluss konstruktiv geführt,
womit ein Verfahren zur Rangbestimmung bereitgestellt wird.
(i)=⇒(ii): Ist r = 0 also A die Nullmatrix gibt es nichts zu tun. Ist r >
0, dann enthält A wenigstes eine Zeile mit einer von Null verschiedenen
Komponente. Diese Komponente lässt sich durch geeignete Zeilen- und
Spaltenvertauschungen an die Position der Komponente a11 bringen,
so dass das Produkt der ersten Zeile und dem Kehrwert der neuen a11
Komponente an der Position a11 den Wert Eins garantiert. Zieht man
nun von den Zeilen a21 . . . a2n bis am1 . . . amn das jeweilige ai1 -Fache
der ersten Zeile ab, dann entsteht eine Matrix deren erste Spalte in der
ersten Komponente eine Eins und in den Übrigen eine
1
∗
···
∗
0
Null stehen hat und in ihrer Form der nebenstehenden
.
Matrix entspricht. Ist m oder n mit Eins indentisch
..
A1
oder ist A = 0, dann endet das Verfahren anderenfalls
1
0
wird es mit A1 wiederholt bis s = min(m, n) oder
Ai = 0 gilt. Also liegt nach Beendigung des Verfahrens eine Matrix vor,
wie in (ii) behauptet. Fast man A nun als ein m-elementige Menge von
Zeilenvektoren auf mit
1r
0r,n−r
u1 =(1,a12 ,...,a1n ),...,us =(0,...,0,1,as,s+1 ,...,asn ),us+1 =(0,...,0),...,um =(0,...,0),
und bildet eine Linearkombination von u1 , . . . , us , die verschwindet,
dann kann die erste Komponente von u1 nur mittels des Linearkoeffizienten Null verschwinden, dann kann aber die zweite Komponente von
u2 auch nur mit dem Linearkoeffizienten Null verschwinden usw. bis
us . Damit folgt die lineare Unabhängigkeit der Vektoren u1 , . . . , us . Da
us+1 = · · · = um = 0 gilt, folgt dass die Vektoren u1 , . . . , us , ui mit
s < i 6 m linear abhängige Vektoren sind, also ist per Definition der
Rang von A 0 = s = rang A = r.
(ii)=⇒(iii) Elementare Zeilenumformungen und Spaltenvertauschungen sind insbesondere elementare Umformungen,
(iii)=⇒(iv) Wegen (iii) können nun alle elementaren Umformungen
genutzt werden, womit man von einer Matrix A 0 aus (ii) ausgehen kann.
Zieht man nun das jeweilige Skalarprodukt der ersten Spalte und a1i
mit 2 6 i 6 n von der i-ten Spalte ab, verschwinden alle Komponenten
der ersten Zeile mit Ausnahme von a11 . Zieht man dann das a2i -Fache
mit 3 6 i 6 n der zweiten Spalte von der i-ten Spalte ab verschwinden auch alle Komponenten der zweiten Zeile bis auf a22 und nach
Repetitorium
53
lineare Algebra
2 Matrizen
S 83.1
S 83.2
S 83.3
S 83.4
Matrizenmultiplikation
r-Schritten erhält man die gewünschte Matrix B aus (iv).
(iv)=⇒(i) Mit S 81 haben A und B den selben Rang. Da die ersten
r-Spalten bis zur r-ten Zeile die kanonischen Einheitsvektoren des Kr
sind, kann man mit einer zur (i)=⇒(ii) analogen Argumentation ableiten, dass rang B = r = rang A gilt. Damit ist der Ringschluss vollzogen.
Mit den gerade verwendeten Methoden lassen sich noch weitere nützliche Aussagen ableiten.
Die Matrix A 0 aus (ii) lässt sich allein durch ele1
B
r
r,n−r
mentare Zeilenumformungen in eine Matrix der 0
0
m−r,r
m−r,n−r
nebenstehenden Form überführen indem man je
das aii -Fache der i-ten Zeile von der ersten bis zur (i − 1)-ten Zeile abzieht.
Hat A den Rang n (6 m), dann kann A nur mit elementaren Zeilenumformungen in eine Matrix der Form A 0 aus (ii) umgewandelt werden,
da die n-Spalten linear unabhängig sind findet sich in jeder Spalte eine von Null verschiedene Komponente, die durch eine entsprechende
Zeilenvertauschung nach „links oben” gebracht werden kann.
Aus den beiden vorhergehenden Aussagen folgt unmittel1n
bar, dass eine Matrix des Rangs n nur durch elementare 0
m−n,n
Zeilenumformungen in die nebenstehende Form gebracht
werden kann.
Gilt m = n kann also eine n-reihige quadratische Matrix vom Rang n
nur durch elementare Zeilenumformungen in die n-reihige Einheitsmatrix überführt werden.
2
2.4 Matrizenmultiplikation
Neben der Matrizenaddition und der skalaren Matrizenmultiplikation
kann als weitere brauchbare Operation die Matrizenmultiplikation definiert werden.
D 78
Die Abbildung
Matm,n (K) × Matn,p (K) → Matm,p (K), (A, B) 7→ AB := (
n
P
aik bkj )ij
k=1
heißt Matrizenmultiplikation mit dem Matrizenprodukt von A und
B, welches offensichtlich nur definiert ist, wenn die Anzahl der Spalten
der linken Matrix mit der Anzahl der Zeilen der rechten Matrix identisch ist. Spezialfälle sind m = 1, p = 1, n = p = 1, m = p = 1,
m = n = p.
Eine Blockmatrix A vom Typ (m, n) der Stufe (r, s) multipliziert man
mit einer Blockmatrix B vom Typ (n, p) der Stufe (s, r) indem man die
korrespondierenden Blöcke Aij , Bij multipliziert.
2
Repetitorium
54
lineare Algebra
2 Matrizen
S 84.1
S 84.2
S 84.3
S 84.4
S 84.5
Matrizenmultiplikation
Die nachfolgenden Eigenschaften der Matrizenmultiplikation lassen sich
in Erinnerung an die Matrizenaddition und skalare Multiplikation durch
einsetzen in die Matrizenmultiplikation für alle A, A 0 ∈ Matm,n (K),
B, B 0 ∈ Matn,p (K) und a ∈ K nachrechnen.
Skalarverträglichkeit: (aA)B = A(aB) = a(AB)
Links-distributiv: (A + A 0 )B = AB + A 0 B
Rechts-distributiv: A(B + B 0 ) = AB + AB 0
Assoziativ: (AB)C = A(BC) mit C ∈ Matpq (K)
Unitär: 1m A = A = A1n
2
!
u
1
Stellt man sich die Matrix A vom Typ (m, n) als den neben..
.
stehenden m-Komponentigen Spaltenvektor von Zeilenvektoren
um
vor und eine (n × p) Matrix B als p-Komponentigen Zeilenvektor (v1 , . . . , vp ) von Spaltenvektoren vor, dann kann man durch einsetzen in die Definition der Matrizenmultiplikation eingedenk der Spezialfälle die folgenden Aussagen zeigen.
S 85.1
Die (ij)-Komponente des Produkts von A und B errechnet sich indem
man die i-te Zeile von A mit der j-ten Spalte von B multipliziert, also
AB = (Av1 , . . . , Avp ) = (ui vj )ij .
S 85.2
A lässt sich vermöge der Standardbasis des Kn als n-Tupel ihrer Spaltenvektoren realisieren mit A = (Ae1 , . . . , Aen ) = (v1 , . . . , vn ).
Seien 1 6 µ 6 m, 1 6 ν, ρ 6 n, 1 6 σ 6 p. Dann gilt für die Matrizeneinheiten Eµν vom Typ (m, n) und Eρσ die Identität
Pn
= (δiµ δνρ δjσ )16i6m,16j6p = δνρ Eµσ .
Eµν Eρσ =
δ
δ
δ
δ
iµ
kν
kρ
jσ
k=1
Ein Äquivalenzsatz zur Kommutativität der Matrizenmultiplikation.
(i)
⇐⇒ AB ist für n-reihige quadratische Matrizen B kommutativ.
(ii)
⇐⇒ AEµν = Eµν A wobei Eµν A eine beliebige Matrizeneinheit aus
Matn (K) ist und µ, ν aus {1, . . . , n} sind.
(iii)
⇐⇒ Es gibt einen Skalar, so dass A mit dem Skalarprodukt von diesem
Skalar und der n-reihigen Einheitsmatrix identisch ist.
S 85.3
S 85.4
S 85.5
Sobald n > 1 gilt, besitzt die Matrizenmultiplikation auf Matn (K) Nullteiler und ist nicht kommutativ.
2
2.4.1 Invertierbare Matrizen GLn (K)
Neben dem vorstehenden Äquivalenzsatz gibt es noch weiteres bemerkenswertes den über Sonderfall m = n = p, also den n-reihigen quadratischen Matrizen zusagen. Augenscheinlich ist für Matrizen aus Matn (K)
die Matrizenmultiplikation stets definiert. Außerdem wurde bereits gezeigt, dass mit 1n ein neutrales Element existiert und dass das Assoziativgesetz gilt. Fände man nun noch ein Inverses zu jeder n-reihigen
Repetitorium
55
lineare Algebra
2 Matrizen
Matrizenmultiplikation
quadratischen Matrix, dann könnte man offensichtlich auf der Menge
dieser Matrizen eine Gruppe nach D 34 definieren.
D 79
Eine n-reihige quadratische Matrix P heißt invertierbar wenn eine nreihige quadratische Matrix P 0 existiert, so dass das Produkt von P und
P 0 die n-reihige Einheitsmatrix ergibt und kommutativ ist. Synonym zu
invertierbar wird auch regulär oder nichtsingulär gesagt.
2
S 86
Angenommen P ∈ Matn (K) ist invertierbar und es gäbe zwei Matrizen
P 0 , P 00 mit den oben genannten Eigenschaften von P 0 . Dann gilt
P 0 = 1n P 0 = (P 00 P)P 0 = P 00 (PP 0 ) = P 00 1n = P 00 .
Es folgt also mit dem Assoziativgesetz und der Unitarität der Matrizenmultiplikation, dass P 0 durch P eindeutig bestimmt ist.
2
D 80
S 87.1
S 87.2
Diese eindeutig bestimmte n-reihige quadratische Matrix heißt Inverse
oder inverse Matrix von P und wird formal mit P −1 bezeichnet.
2
Nachstehend werden einige naheliegenden Folgerungen über ein beliebige n-reihige quadratische invertierbare Matrix P aufgelistet.
Die n-reihige Einheitsmatrix ist invertierbar wobei die Inverse die nreinige Einheitsmatrix ist.
Die Inverse von P ist invertierbar mit P als Inverser.
S 87.3
Das Matrizenprodukt von P und Q ist invertierbar mit dem Matrizenprodukt von der inversen Matrix von P und der inversen Matrix von Q
als Inversen.
S 87.4
Das Skalarprodukt von a und P ist invertierbar wobei das Skalarprodukt von dem Reziproken von a und dem Inversen von P die inverse
Matrix von aP ist.
Die Transponierte von P ist invertierbar mit der Transponierten der
Inversen von P als Inverse.
2
Genauso offensichtlich wie die n-reihige Einheitsmatrix invertierbar ist,
ist die Nullmatrix 0n nicht invertierbar. Es sind also nicht alle n-reihige
quadratische Matrizen invertierbar, womit man die Menge der quadratischen Matrizen auf diejenigen einschränken muss, die invertierbar sind,
möchte man ein Gruppe definieren.
Sei GLn (K) die Menge der invertierbaren Matrizen dann heißt das Paar
GLn (K) := (GLn (K), ) Allgemeine lineare Gruppe n-ten Grades27 .
Wobei die von der Matrizenmultiplikation induzierte Operation auf
GLn (K) ist.
2
Daraus entsteht nun die Notwendigkeit entscheiden zu können ob eine
n-reihige quadratische Matrix P invertierbar, also aus GLn (K) ist.
S 87.5
D 81
27
Englisch: General Linear Group
Repetitorium
56
lineare Algebra
2 Matrizen
S 88
Matrizenmultiplikation
Dieser Äquivalenzsatz listet einige Entscheidungshilfen für diese Fragestellung.
(i)
⇐⇒ P ist invertierbar.
(ii)
⇐⇒ Der Rang von P ist n
(iii)
⇐⇒ Die Spalten von P sind eine Basis des Kn .
(iv)
⇐⇒ Die lineare Abbildung28 lP : Kn → Km , v 7→ Pv ist surjektiv.
(v)
⇐⇒ Die lineare Abbildung lP ist injektiv.
(vi)
⇐⇒ Die lineare Abbildung lP ist bijektiv.
(vii)
⇐⇒ Es gibt ein Q ∈ Matn (K) mit PQ = 1n
(viii)
⇐⇒ Es gibt ein Q ∈ Matn (K) mit QP = 1n
2
Einsehen lässt sich dieser Satz durch den Ringschluss
(i) ⇒ (viii) ⇒ (ii) ⇒ (iii) ⇒ (iv) ⇒ (v) ⇒ (vi) ⇒ (vii) ⇒ (i).
(i) ⇒ (viii) : Folgt unmittelbar aus der Definition der Invertierbarkeit.
(viii) ⇒ (ii) : Per Voraussetzung gilt
(e1 , . . . , en ) = 1n = QP = Q(v1 , . . . , vn ) = (Qv1 , . . . , Qvn ) = (lQ (v1 ), . . . , lQ (vn )).
Die lQ (vi ) werden also auf die linear unabhängigen Basisvektoren ei abgebildet. Da lQ eine lineare Abbildung ist folgt mit dem Umkehrschluss
von S 65.2, dass die Vektoren v1 , . . . , vn linear unabhängig sind und damit ist der Rang von P gleich n.
(ii) ⇒ (iii) : Die Spalten von P sind aufgrund der Rangdefiniton linear
unabhängig und ihre Anzahl lässt sich wegen S 47 mit der Dimension
des Kn identifizieren, also sind die Spalten von P mit S 48 eine Basis
Basis des Kn .
(iii) ⇒ (iv) : Die Spalten von P bilden eine Basis des Kn und nach S 97
sind sie ein Erzeugendensystem des Bildes von lP , also ist lP surjektiv
und mit S 69.3 auch injektiv (v) und bijektiv (vi).
(vi) ⇒ (vii) : Da lP bijektiv ist existieren wj mit j ∈ {1, . . . , n} derart, dass lP (wj ) der j-te Einheitsvektor der Einheitsbasis des Kn ist.
Definiert man nun Q als n-Tupel (w1 , . . . , wn ), dann gilt
PQ = (Pw1 , . . . , Pwn ) = (e1 , . . . , en ) = 1n .
(vii) ⇒ (i) : Q hat höchstens den Rang n. Da sich der Rang des Produkts PQ einerseits mit dem der n-reihigen Einheitsmatrix identifizieren lässt und andererseits mit S 101 höchstens der kleinere der beiden
Ränge von P und Q ist, hat Q genau den Rang n. Also existiert mit dem
Schluss von (ii) auf (vii) eine Matrix R mit der Eigenschaft QR = 1n .
Damit lässt sich nachrechnen R = 1n R = (PQ)R = P(QR) = P1n = P,
und es folgt weiter dass PQ = QP = 1n , also P ist invertierbar.
2.4.2 Inversbildung durch Matrizenumformungen
28
Diese Abbildung wird in Abschnitt 2.6 genauer betrachtet
Repetitorium
57
lineare Algebra
2 Matrizen
Matrizenmultiplikation
Man kann zeigen, dass sich mittels elementarer Matrizenumformungen
die Inverse einer n-reihigen quadratischen Matrix bilden bzw. sich ihre
Nichtexistenz erweisen lässt. Dies gelingt indem man die Umformungen
als Matrizenmultiplikationen mit in D 71.3 definierten Elementarmatrizen identifiziert. Zunächst noch ein paar hilfreiche Aussagen über
Elementarmatrizen. Die λ und µ befinden sich dabei selbstverständlich im Rahmen der annehmbaren Zeilen- bzw. Spaltenindizes und der
Skalar a ist von Null verschieden.
S 89.1
S 89.2
Es gilt Fλµ (1n − Eλµ ) = Fλµ Fµ (−1)Fλµ Fµ (−1) = 1n .
So wie Fλ (a)Fλ (1/a) = 1n gilt.
S 89.3
Jede Elementarmatrix ist invertierbar, und ihr inverses ist Produkt von
Elementarmatrizen.
Sei im Weiteren A aus Matm,n (K).
S 89.4
Man Erhält die Produkte AFλµ bzw. Fµλ A aus A durch Addition der
λ-ten Spalte bzw. Zeile zur µ-ten Spalte bzw. Zeile.
(n)
(m)
Des Weiteren erhält man die Produkte AFλ (a) bzw. Fλ (a)A vermöge des Skalarprodukts von a und A’s λ-ten Spalte bzw. Zeile.
Iterierte elementarer Spalten- bzw Zeilenumformungen von A entsprechen umkehrbar eindeutig der Multiplikation von rechts bzw. von links
mit einem Produkt von Elementarmatrizen des Grades n bzw. m. 2
Da nun erkannt wurde, dass elementare Umformungen durch Matrizenprodukte realisierbar sind, kann der Normalformensatz formuliert
werden.
!
Mit S 82 und S 89.6 ergibt sich unmittelbar, dass zu
1r 0
einer jeden Matrix A aus Matm,n (K) mit dem Rang r PAQ = 0 0
Produkte P bzw. Q von Elementarmatrizen des Grades m bzw. n gibt, so dass nebenstehende Identität erfüllt ist.
S 89.5
S 89.6
S 90
(n)
(m)
2
S 91
Um nun die Invertierbarkeit eine quadratischen Matrix A mit elementaren Matrizenumformungen in Verbindung zu bringen, kann man einen
weiteren Satz mit Äquivalenzkriterien zur Invertierbarkeit formulieren,
welcher in der Erzeugung der Inversen von A gipfelt.
(i)
⇐⇒ A ist invertierbar.
(ii)
⇐⇒ A kann allein durch iterierte elementare Zeilenumformungen in
die Einheitsmatrix überführt werden.
(iii)
⇐⇒ A kann allein durch iterierte elementare Spaltenumformungen in
die Einheitsmatrix überführt werden.
(iv)
⇐⇒ A ist ein Produkt von Elementarmatrizen n-ten Grades. Wendet
man die selben iterierten Zeilenumformungen, die A in die EinheitsmaRepetitorium
58
lineare Algebra
2 Matrizen
(2 × 2)-Matrizen
trix überführen, auf die n-reihige Einheitsmatrix an so wird diese in
die Inverse von A überführt.
2
Bemerkenswert ist an dieser Stelle noch, dass man sich zwischen elementaren Zeilen- und Spaltenumformungen entscheiden muss wenn
man auf diese Art und Weise die Inverse einer quadratischen Matrix bilden möchte.
2.5 (2 × 2)-Matrizen
D 82
S 92
S 93
S 94
S 95.1
S 95.2
S 95.3
Da n-reihige quadratische Matrizen eine zentrale Rolle spielen, ist es
nützlich den einfachsten nichttrivialen Fall – 2-reihige quadratische Matrizen – genauer zu betrachten, bevor allgemeinere Untersuchungen angestellt werden.
Sei A = ac bd ∈ Mat2 (K), dann heißt det A := ad − bc Determinante
von A und spur A := a + d die Spur von A.
2
Wegen der Rangdefinition verschwindet der Rang von A genau dann,
wenn A die Nullmatrix 02 ist.
2
Ist der Rang von A eins, sind die Spalten von A linear abhängig also
b = sa und d = sc. In det A eingesetz impliziert dies s(ac − ac) = 0 =
det A. Verschwindet umgekehrt die Determinante von A, nicht aber A
selbst und man nimmt an, die Spalten von A wären linear unabhängig.
Dann gilt mit
b
a
ab−ba
0
cb−da
b
a
a d − b c = ad−bc = 0 = cd−dc = c d − d c ,
dass a, b, c und d verschwinden müssen wegen der linearen Unabhängigkeit der Spalten von A. Damit verschwände A aber auch, was der
Voraussetzung wiederspricht, also sind die Spalten von A linear abhängig und damit der Rang von A eins.
Der Rang von A ist genau dann eins, wenn A nicht verschwindet und
det A schon.
2
Damit folgt schließlich, dass der Rang von A genau dann zwei ist, wenn
die Determinante von A nicht verschwindet.
2
Durch Nachrechnen lassen sich noch die folgenden Aussagen über zweireihige quadratische Matrizen A, A 0 rechtfertigen.
Die Determinante des Produkts von a und A 0 ist identisch mit dem
Produkt von a und det A 0 .
Die Spur des Produkts von A und A 0 ist die selbe wie die des Produkts
von A 0 und A.
Das Quadrat von A lässt sich identifizieren mit der Differenz der Produkte von spur A und A sowie von det A und 12 .
2
Repetitorium
59
lineare Algebra
2 Matrizen
lineare Abbildungen
2.6 lineare Abbildungen
S 96
S 97
Zwischen Matrizen und linearen Abbildungen kann eine Beziehung hergestellt werden. Summa summarum lässt sich zeigen, dass die beiden
Begriffe „Matrix” und „lineare Abbildung” einander entsprechen. Zunächst soll gezeigt werden, wie man einer Matrix eine lineare Abbildung zuordnen kann. Nun gilt ja wegen der Skalarverträglichkeit für
die Matrizen A vom Typ (m, n) und v vom Typ (n, 1), dass A(av) mit
a(Av) identisch ist. Hat man noch eine weiter Matrix v 0 vom Typ (n, 1),
dann folgt mit der rechts-Distributivität die Identität von A(v+v 0 ) und
Av + Av 0 . Damit ist die folgende Aussage als wahr erkannt.
Für ein beliebiges Vektor A aus dem Vektorraum der (m × n)-Matrizen
über einen Körper K ist die Abbildung lA : Kn → Km , v 7→ lA (v) := Av
linear und somit ein Element von Hom(Kn , Km ) .
2
Fasst man A als n-Tupel (a1 , . . . , an ) ihrer Spaltenvektoren auf, dann
bilden mit S 65.1 die Vektoren Aej = vj ein Erzeugendensystem von
Bild lA , und somit gilt
Bild lA = Lin(a1 , . . . , an )
2
Wie eingangs versprochen soll nun eine Zuordnung von einer Matrix zu
einem Homomorphismus angegeben werden, in Form der Abbildung
l : Matm,n (K) −→ Hom(Kn , Km ), A 7−→ l(A) := lA .
S 98
Nimmt man sich nun zwei Skalare a, b ∈ K und zwei Matrizen aus
Matm,n (K), dann kann man die Identität von laA+bB und alA + blB
nachrechnen indem man zeigt, dass laA+bB (v) = alA (v) + blB (v) für
alle v aus Kn gilt.
Die Abbildung l ist also ein Vekorraumhomomorphismus.
2
Möchte man zwei Abbildungen lA und lB mittels Komposition verknüpfen, dann muss analog zur Matrizenmultiplikation die Spaltenanzahl
von A mit der Zeilenanzahl von B übereinstimmen. Ist dies gegeben,
kann man sich davon Überzeugen, dass lAB und lA ◦ lB wohldefinierte
Ausdrücke sind und wegen
lAB (v) = (AB)v = A(Bv) = lA (lB (v)) = (lA ◦ lB )(v)
sind sie identisch.
S 99
Es gilt also lAB = lA ◦ lB mit A ∈ Matm,n (K), B ∈ Matn,p (K)
2
Da man nun jeder Matrix A kanonisch ein lineare Abbildung zuordnen
kann, können Informationen über A in Informationen über die Abbildung lA übersetzt werden. Beispielsweise wurde in S 97 festgestellt,
dass die Spalten von A ein Erzeugendensystem des Bildes von lA ist.
Eingedenk der beiden Rangdefinitionen D 74, 68 folgt nun unmittelbar,
Repetitorium
60
lineare Algebra
2 Matrizen
S 100
S 101
lineare Abbildungen
dass
der Rang einer Matrix A ∈ Matm,n (K) identisch ist mit dem von lA . 2
Nun kann das Produkt einer Matrizenmultiplikation mit dem Rangbegriff in Beziehung gesetzt werden indem man S 71.2 für Matrizen
A ∈ Matm,n (K) und B ∈ Matn,p (K) übersetzt.
Die Differenz der Summe der Matrizenränge und n ist höchstens so groß
wie der Rang des Produkt von A und B, welcher wiederum nicht größer
ist als der kleinere der beiden Ränge rang A und rang B.
2
Außerdem lässt sich nun auch das Bild und der Kern einer Matrix
sinnvoll definieren.
D 83.1
D 83.2
S 102
S 103
D 84.1
Die Menge aller m-dimensionaler Spaltenvektoren Av mit A ∈ Matm,n (K)
und v ∈ Kn heißt Bild von A.
Die Menge aller n-dimensionaler Spaltenvektoren, die von lA auf Null
abgebildet werden heißt Kern von A.
2
Damit lassen sich weitere Eigenschaften linearer Abbildungen auf Matrizen übertragen.
Mit S 70.1 folgt dim Kern A = n − rang A mit A ∈ Matm,n (K).
2
Für eine n-reihige quadratische Matrix kann die Äquivalenz der nachstehenden Aussagen gezeigt werden.
(i)
⇐⇒ Kern A = {0}.
(ii)
⇐⇒ Bild A = Kn .
(iii)
⇐⇒ rang A = n.
2
Da der Kern der Matrix A nichts anderes ist als der Kern der linearen
Abbildung lA folgt mit S 64 aus (i) die Injektivität von lA . Da A voraussetzungsgemäß quadratisch ist, sind lA ’s Definitions- und Wertemenge
Kn , also identisch. Damit ist die Voraussetzung für Satz S 69.3 erfüllt
und lA ist damit surjektiv was nichts anderes heißt als Bild A = Kn .
Da nach S 47 n die Dimension des Kn ist, folgt mit der Rangdefinition
D 68 linearer Abbildungen, dass der Rang von lA identisch mit n ist
und somit auch rang A = n definitionsgemäß gilt. Mit der obigen Dimensionsformel S 102 ergibt sich dann wieder (i) womit der Ringschluss
(i) ⇒ (ii) ⇒ (iii) ⇒ (i) vollzogen ist.
Nachdem mit der Abbildung lA jeder Matrix kanonisch ein Homomorphismus zugeordnet werden kann, soll nun gezeigt werden, wie man
einer jeden linearen Abbildung eine Matrix zuordnen kann. Hierfür wird
der Begriff der geordneten Basis benötigt.
Eine geordnete Basis eines endlich erzeugten Vektorraums ist ein nTupel (v1 , . . . , vn ) paarweise verschiedener Vektoren, die eine Basis des
Vektorraums bilden.
Repetitorium
61
lineare Algebra
2 Matrizen
lineare Abbildungen
D 84.2
Das n-Tupel von Einheitsvektoren heißt geordnete Standardbasis des
n-dimensionalen Spaltenraums. Man schreibt formal
E := E(n) := (e1 , . . . , en )
2
S 104.1
Lineare Abbildungen lassen sich durch Matrizen vollständig beschreiben29 , weil es zu einer geordneten Basis B := (v1 , . . . , vn ) von V und
einem n-Tupel von Vektoren (w1 , . . . , wn ) aus W genau eine lineare
Abbildung f von V in W gibt, für die gilt f(vj ) = wj ∀j ∈ {1, . . . , n}.
f ist genau dann ein Isomorphismus, wenn (w1 , . . . , wn ) eine geordnete
Basis von W ist.
2
Mit S 41 lässt sich jeder Vektor aus V eindeutig als Linearkombination der Vektoren aus B darstellen und mit S 57.3 folgt f(v) =
Pn
Pn
j=1 aj f(vj ) =
j=1 aj wj . Der Wert von f an der Stelle v ist also
durch v und die vorausgesetzten Eigenschaften von f vollständig bePn
stimmt, und mit der Abbildungsvorschrift f(v) := j=1 aj wj existierte
dann eine Abbildung mit den gewünschten Eigenschaften, die aufgrund
der oben genannten Eindeutigkeit wohldefiniert ist. Mit S 56 lässt sich
die Linearität von f nachrechnen.
Das (w1 , . . . , wn ) eine Basis von W ist ergibt sich mit S 66. Ist
(w1 , . . . , wn ) eine geordnete Basis, dann Existiert mit S 104.1 genau
eine Abbildung g : W → V mit g(wj ) = vj . Da die Komposition zweier
Homomorphismen wieder einen Homomorphismus ergibt, ist (g ◦ f) :
V → V mit (g ◦ f)(vj ) = vj auch ein Homomorphismus und dieser ist
mit der Basiseigenschaft von (v1 , . . . , vn ) und S 104.1 eindeutig. Damit
ergibt sich unmittelbar, dass g ◦ f mit der Identität auf V identisch ist.
Analog lässt sich der eindeutige Homomorphismus (f ◦ g) : W → W mit
(f ◦ g)(wj ) = wj als Identität auf W identifizieren. Also ist mit S 4.7 f
als bijektiv erkannt und somit S 104.2 verifiziert.
Setzt man nun insbesondere (w1 , . . . , wn ) = (0, . . . , 0), also f(vj ) =
0, dann verhält sich f für die Basisvektoren aus (v1 , . . . , vn ) wie die
Nullabbildung, da diese ein Homomorphismus ist, muss f mit S 104.1
die Nullabbildung sein.
2
Zu der Aussage, dass ein n-dimensionaler Vektorraum zum n-dimensionalen Spaltenraum isomorph ist (S 61), lässt sich mit der gerade
gewonnen Erkenntnis ein alternativer Beweis angeben. Denn f : Kn →
Pn
V, t (a1 , . . . , an ) := j=1 aj vj ist im Sinne von S 104.1 derjenige Homomorphismus, der f(ej ) den Vektor vj zuordnet. Da (e1 , . . . , en ) und
(v1 , . . . , vn ) per Definition geordnete Basen sind folgt mit S 104.2, dass
f ein Isomorphismus ist.
S 104.2
S 105
29
Dieser Umstand wird auch lineare Fortsetzung genannt.
Repetitorium
62
lineare Algebra
2 Matrizen
D 85
S 106.1
lineare Abbildungen
Ist f : V → W eine lineare Abbildung, B = (v1 , . . . , vn ) eine geordnete
Basis von V und C = (w1 , . . . , wn ) eine geordnete Basis von W. Stellt
man ein Bild von vj als eindeutige Linearkombination der w1 , . . . , wn
Pn
dar, also f(vj ) = i=1 aij wi mit den eindeutig bestimmten aij , dann
heißt die m × n Matrix MB
C (f) := (aij )ij ∈ Matm,n (K), die Matrix von
f bezüglich B und C.
Ist f ein Endomorphismus, dann setzt man MB (f) := MB
B (f) ∈ Matn (K)
und nennt MB (f) Matrix von f bezüglich B.
2
Die j-te Spalte von MC
B (f) wird also ermittelt, indem man die Linearkoeffizienten des Bildes von vj der Reihe nach zu einer Spalte zusammenfasst.
Dem Nullhomomorphismus von V in W wird dann beispielsweise die
Nullmatrix vom Typ (n, m) unabhängig von den gewählten Basen zugeordnet, und der Identität von V wird für eine beliebig gewählte geordnete Basis die n-reihige Einheitsmatrix zugeordnet. Dies sollte aber nicht
darüber hinwegtäuschen, dass im Regelfall die Matrix eines Homomorphismus bezüglich zweier Basen sehr wohl von diesen Basen abhängt.
Man errechnet zum Beispiel als Matrix der kanonischen Projektion von
Kn in Km bezüglich der geordneten Standardbasen E(n) und E(m) die
Matrix 1m 0 , die bezüglich anderer Basen auch anders aussieht.
Hat man einen Homomorphismus f von V in W und die geordneten
Basen B = (v1 , . . . , vn ) bzw. C = (w1 , . . . , wn ) von V bzw W gegeben.
(f) eindeuDann bestimmt definitionsgemäß die n × m-Matrix A = MB
CP
0
0
0
tig ein n-Tupel (w1 , . . . , wn ) von Vektoren aus W mit wj := m
i=1 aij wi
0
und f(vj ) = wj . Mit S 104.1 folgt, dass es genau eine solche lineare Abbildung gibt.
Man kann also festhalten, dass die Abbildung
B
MB
C : Hom(V, W) → Matm,n (K), f 7→ MC (f)
S 106.2
bijektiv ist. Rechnet man noch nach, dass MB
C linear ist, dann handelt
B
es sich bei MC um einen Vektorraumisomorphismus.
Satz S 67.1 lehrt, dass der Vektorraum auf den linearen Abbildungen
von V in W die gleiche Dimension wie der Vektorraum auf den m × nMatrizen über K hat, so dass mit S 72.3 folgt
dim Hom(V, W) = n · m = (dim V)(dim W).
Also ist der Vektorraum auf Menge der linearen Abbildungen von V in
W endlichdimensional.
S 106.3
Für den Vektorraum auf der Menge aller Endomorphismen von V über
K gilt dann entsprechend dim End(V) = (dim V)2 . Natürlich ist auch
End(V) endlich dimensional.
Repetitorium
63
lineare Algebra
2 Matrizen
S 106.4
lineare Abbildungen
Sei U ein endlich erzeugter Vektorraum mit der geordneten Basis A =
(u1 , . . . , up ) und der Homomorphismus g von U in V, dann lässt sich
folgende Identität nachrechnen
B
A
MA
C (f ◦ g) = MC (f)MB (g)
womit die Matrizenmultiplikation eine nachträgliche Rechtfertigung erPm
fährt. Denn definitionsgemäß gilt f(vj ) =
i=1 aij wi und g(uk ) =
Pn
j=1 bjk vj mit 1 6 k 6 p, also folgt für die Komposition
P
Pm
Pm Pn
bjk f(vj ) = n
j=1 (aij bjk )wi ,
i=1
j=1 bjk
i=1 aij wi =
Pn
B
A
MC (f ◦ g) = ( j=1 aij bjk )ik = (aij )ij (bjk )jk = MC (f)MA
B (g).
f(g(uk )) =
S 106.5
S 106.6
S 107
Pn
j=1
Weiter folgt mit dim V = n, dass f genau dann ein Isomorphismus ist,
wenn die Dimension von W ebenfalls n ist (S 67.1) und die Matrix
von f bezüglich B und C – aus der Menge der n-reihigen quadratischen
−1
−1
Matrizen – invertierbar ist. In diesem Falle gilt MB
= MC
).
C (f)
B (f
B
C −1
Da mit S 4.7, 60.3, D 15 und vorstehendem Satz MC (f)MB (f ) = 1n
folgt und mit S 88 die Invertierbarkeit von MB
C (f) mit der Inversen in
C
der geforderten Form. Umgekehrt gilt, da MB : Hom(W, V) → Matm,n
−1
−1
bijektiv ist, gibt es zu MC
) = MB
eine lineare Abbildung g
B (f
C (f)
−1
B
C
aus Hom(W, V) mit MB (g) = MC (f) , so dass sich in analoger Weise
zu S 104.2 f als Isomorphismus nachweisen lässt. Damit wurde die Frage
ob ein Homomorphismus ein Isomorphismus ist, in eine Frage nach der
Invertierbarkeit einer Matrix umgeformt.
Der Sonderfall der Endomorphismen, also U = V = W und A = B = C
soll ob seiner Wichtigkeit nocheinmal gesondert aufgeführt werden.
MB : End(V) → Matn (K), f 7→ MB (f) ist also ein Isomorphismus mit
MB (f ◦ g) = MB (f)MB (g), (f, g ∈ End(V)) und f ist ein Isomorphismus genau dann, wenn MB (f) aus der Menge der allgemeinen linearen
Gruppe n-ten Grades ist (D 81). Ist MB (f) ∈ GLn (K), dann ist die
Inverse der Matrix von f bezüglich B die Matrix der Umkehrabbildung
von f bezüglich B.
2
(n)
Nun kann S 98 noch ergänzt werden, denn mit D 85 und lA (ej ) =
Pm
(m)
folg, dass die Matrix von lA bezüglich der n bzw. mi=1 aij ei
dimensionalen geordneten Standardbasen identisch mit A ist. Die KomE(n)
E(n)
position von ME
(m) ◦ l ist also die Identität auf Matm,n (K). Da ME(m)
schon in S 106.1 als Vektorraumisomorphismus erkannt wurde, gilt selE(n) −1
.
biges für l = (ME
(m) )
(n)
E
Also gilt die Identität ME
(m) (lA ) = A für alle Matrizen vom Typ (m, n)
über K, und damit ist die Abbildung
l : Matm,n (K) −→ Hom(Kn , Km ), A 7−→ l(A) := lA
(n)
E
ein Vektorraumisomorphismus mit l−1 = ME
(m) .
Repetitorium
64
2
lineare Algebra
2 Matrizen
D 86
S 108.1
lineare Abbildungen
Möchte man ein lineare Abbildung f ∈ Hom(V, W) mit einer linearen
Abbildung lA ∈ Hom(Kn , Km ) vergleichen, muss man zunächst einen
Zusammenhang zwischen V und Kn bzw. zwischen W und Km herstellen, was sich mit dem Begriff des Übersetzungsisomorphismus realisieren lässt.
Ist V ein endlich erzeugter Vektorraum mit der geordneten Basis B =
(v1 , . . . , vn ). Dann heißt die mit S 104.1 eindeutig bestimmte lineare
Abbildung ΦB : V → Kn mit ΦB (vj ) = ej mit S 104.2 Übersetzungsisomorphismus von V auf Kn .
2
Sei B = (v1 , . . . , vn ) bzw. C = (w1 , . . . , wn ) die geordnete Basis des
Vektorraums V bzw. W, und f sei ein Homomorphismus von V in W
für die nachstehenden Sätze.
Mit A := MB
∈ Matm,n (K)
C (f)
gilt das nebenstehende Kommutativdiagramm, also ΦC ◦ f = lA ◦ ΦB . Um
diese Identität als wahr zu erkennen genügt es mit S 106.1 zu zeigen, dass die
Matrix von (ΦC ◦ f) bezüglich B und
E(m) identisch ist mit der von (lA ◦ΦB ).
f
V
W
ΦB
ΦC
lA
Kn
Km
Kommutativ Diagramm
(n)
E
B
B
MB(m) (ΦC ◦f)=MC(m) (ΦC )MB
C (f)=1m A=A1n =M (m) (lA )M (n) (ΦB )=M (m) (lA ◦ΦB )
E
S 108.2
S 108.3
S 108.4
E
E
E
(−1)
(−1)
Bild f = f(V) = ΦC (lA (ΦB (V))) = ΦC (Bild lA )
(−1)
Kern f = Kern(lA ΦB ) = ΦB (Kern A).
Auch hier sei der Fall, dass f aus der
Menge der Endomorphismen über K ist
gesondert notiert. Es gilt die durch das
nebenstehende Diagramm verdeutlichte Identität ΦB ◦ f = lA ◦ ΦB .
V
E
=
(−1)
ΦC (Bild A).
f
ΦB
Kn
V
ΦB
lA
Kn
2
Damit wurde nun gezeigt, dass sich sämtliche algebraischen Daten von
f eindeutig durch die Matrix A = MB
C (f) ausdrücken lassen. Da die
Matrix einer linearen Abbildung von den zugrundeliegenden Basen abhängt, kann das Aussehen der Matrix durch die Wahl der geordneten
Basen der Definitions- und Wertemenge beeinflusst werden. Dies motiviert eine Untersuchung des Transformationsverhalten einer Matrix
eines Homomorphismus wenn ein Basiswechsel vollzogen wird. Um den
Übergang einer Basis zu einer anderen zu untersuchen, ist die Begriffsbildung der Übergangsmatrix sinnvoll.
D 87
Sei B = (v1 , . . . , vn ) eine geordnete Basis und B 0 = (v10 , . . . , vn0 ) ein
Repetitorium
65
lineare Algebra
2 Matrizen
lineare Abbildungen
n-Tupel von Vektoren aus V. Dann lassen sich die Vektoren vj0 als LiP
nearkombinationen n
i=1 bij vi der v1 , . . . , vn darstellen und die wegen
S 41 eindeutig bestimmten bij bilden die Übergangsmatrix von B zu
B 0.
2
S 109
S 110.1
Mit S 104.1 existiert genau eine lineare Abbildung von V in V mit
f(vj ) = vj0 . Weiter ist definitionsgemäß die Matrix von f bezüglich B die
Übergangsmatrix von B zu B 0 . S 106.5 lehrt schließlich, dass die Übergangsmatrix genau dann invertierbar ist, falls f ein Isomorphismus ist,
was mit S 104.2 genau dann der Fall ist, wenn B 0 eine geordnete Basis
ist. B 0 ist also genau dann eine geordnete Basis, wenn die Übergangsmatrix von B zu B 0 invertierbar ist. Ist dies der Fall, folgt mit der Gleichung
Pn
idV (vj0 ) = vj0 = i=1 bij vi , ∀j ∈ {1, . . . , n}, dass die Übergangsmatrix,
0
die Matrix der Identität bezüglich B und B 0 ist, also ÜB = MB
B (idV ).2
Mit diesem Satz, kann das Transformationsverhalten einer Matrix eines
Homomorphismuses beschrieben werden.
Die oben genannten Mengen B und B 0 sind nun geordnete Basen von V
0
sowie C = (w1 , . . . , wm ) und C 0 = (w10 , . . . , wm
) geordnete Basen von
W sind. Außerdem ist ÜB ∈ GLn (K) die Übersetzungsmatrix von B zu
B 0 und ÜC ∈ GLn (K) die von C zu C 0 . Dann gilt für einen Homomor0
−1
B
phismus von V in W die Identität MB
C 0 (f) = ÜC MC (f)ÜB . Denn mit
dem oben formulierten Satz und S 106.4, 106.5 lässt sich nachrechnen
0
0
0
−1
B
B
MB
(f)=MB
((idW )−1 ◦f◦idV )=MC
((idW )−1 )MB
C (f)MB (idV )=ÜC MC (f)ÜB .
C0
C0
C0
S 110.2
0
Für den Spezialfall der Endomorphismen mit ÜB = MB
B 0 (idV ) gilt dann
−1
−1
MB 0 (f) = ÜB MB (f)ÜB für alle f ∈ EndK (V).
2
2.6.1 Linearformen, dualer Raum
D 88.1
D 88.2
D 88.3
S 111.1
In diesem Abschnitt werden einige wichtige Aspekte der Homomorphismen herausgearbeitet, die auf den eindimensionalen Spaltenraum
abbilden. Zunächst einige übliche Begriffsbildungen.
Unter einer Linearform auf oder auch von V versteht man eine lineare
Abbildung von V in K.
Die Menge aller Linearformen von V heißt der Dualraum von V und
wird formal mit V∗ = Hom(V, K) bezeichnet.
Ein Untervektorraum eines endlichdimensionalen Vektorraums, dessen
Dimension genau um eins geringer ist als die des Vektorraums heißt
Hyperebene des Vektorraums.
Die Hyperebene einer Ursprungsgeraden ist der Nullraum, einer Ebene
die in ihr enthaltenen Ursprungsgeraden usw.
2
Es ergibt sich, dass eine von Null verschiedene Linearform f auf V surRepetitorium
66
lineare Algebra
2 Matrizen
S 111.2
S 111.3
lineare Abbildungen
jektiv ist und der Kern von f ist eine Hyperebene von V, falls V endlichdimensional ist. Denn mit S 63 und f 6= 0 ist das Bild von f ein
eindimensionaler Unterraum von K und mit S 52 K selbst, was die Surjektivität belegt. Mit der Dimensionsformel S 68 ergibt sich der Rest
der Aussage.
Ist V endlichdimensional und B = (v1 , . . . , vn ) eine geordnete Basis von
V. Dann folgt mit S 104.1, dass es genau ein n-Tupel (f1 , . . . , fn ) von
Linearformen f1 , . . . , fn mit fi (vj ) = δij gibt.
P
Pn
Setzt man n
i=1 ai fi = 0, dann gilt insbesondere
i=1 ai fi (vj ) = 0 mit
j = 1, . . . , n. In jedem Summanden
(a1 f1 (v1 ) + · · · + a1 f1 (vn )) + · · · + (an fn (v1 ) + · · · + an fn (vn ))
verschwinden die fi (vj ) mit i 6= j, so dass nur die Summe a1 f1 (v1 ) +
· · · + an fn (vn ), also a1 + · · · + an bleibt, die genau dann verschwindet,
wenn alle ai verschwinden. Damit sind die f1 , . . . , fn linear unabhängig
und paarweise verschieden. Da für ein f aus V∗ ,
Pn
Pn
Pn
( i=1 f(vi )fi )(vj ) = i=1 f(vi )fi (vi ) = i=1 f(vi )δij = f(vj )
Pn
gilt, folgt mit S 104.1 die Identität f = i=1 f(vi )fi und zusammenfassend, dass B∗ := (f1 , . . . , fn ) eine geordnete Basis von V∗ ist.
2
D 89
S 112.1
S 112.2
S 112.3
S 112.4
S 112.5
Die gerade konstruierte geordnete Basis B∗ heißt die B-duale Basis
oder zu B duale Basis von V∗ .
2
Des weiteren lassen sich nachstehende Schlüsse über eine endlichdimensionale Vektorraum V und seinen Dualraum V∗ ziehen.
Ist V endlichdimensional, dann auch dessen Dualraum.
V hat die gleiche Dimension wie sein Dualraum.
Zu jedem von Null verschiedenen Vektor v gibt es eine Linearform auf
V, die diesen Vektor auf die Eins abbildet. Denn v ist linear unabhängig,
also gibt es mit S 45.4 eine geordnete Basis B = (v1 , . . . , vn ) von V mit
v1 = v. Ist nun noch B∗ = (f1 , . . . , fn ) die B-duale Basis von V∗ , dann
ist f1 die gesuchte Abbildung.
Wendet man nun S 112.3 auf v − v 0 6= 0 an, dann trennt V∗ die Punkte
von V, das heißt zu verschiedenen Vektoren v, v 0 ∈ V gibt es einen
Linearform f auf V mit f(v) 6= f(v 0 ).
Für die Matrix einer Linearform f ∈ V ∗ gilt mit der geordneten Standardbasis C := (1) von K1 , dass
B
uB (f) := MB
(1) (f) = MC (f) = (f(v1 ), . . . , f(vn )) ∈ Mat1,n (K) = Kn .
S 112.6
Und mit S 106.1 ist uB : V ∗ → Kn , f 7→ uB (f) ein Vektorraumisomorphismus.
Repetitorium
67
lineare Algebra
2 Matrizen
S 112.7
S 112.8
Determinante
Analog zu S 108.1 kann man mit den
Übersetzungshomomorphismen
ΦB : V → Kn und Φ(1) : K → K1 = K
– also Φ(1) = idK – ableiten, dass f =
lu ◦ ΦB und damit f(v) = lu (ΦB (v)) =
uΦB (v) für alle v ∈ V gilt.
V
f
K
f
ΦB
Kn
Φ(1)
lu
K
Ist in S 112.7 V = Kn und B die geordnete Standardbasis des Kn , dann
gilt ΦB = idn
2
K und somit f(v) = uv mit u = uB (f).
Die B-duale Basis von (Kn )∗ kann man ohne weiteres explizit berechnen. Ist B = (v1 , . . . , vn ) eine geordnete Basis des Kn , dann lässt sich
B auch als n-reihige quadratische Matrix interpretieren, die mit S 88
invertierbar ist und mit S 91 lässt sich die Inverse B−1 = t (u1 , . . . , un )
mit ui ∈ Kn berechnen. Die Abbildungen fi : Kn → K, v 7→ fi (v) := ui v
sind linearformen und mit S 85.1 folgt
(δij )ij = 1n = B−1 B = (ui vj )ij = (fi (vj ))ij ,
also (fi (vj ))ij = (δij )ij und damit ist B∗ := (f1 , . . . , fn ) die B−duale
Basis von (Kn )∗ .
2.7 Determinante
Der in Abschnitt 2.5 eingeführte Begriff, der Determinante kann verallgemeinert werden, da sich jeder n-reihigen quadratischen Matrix in
eindeutiger Art und Weise eine Determinante zuordnen lässt. Die geometrische Deutung der Determinante ist für eine 1×1-Matrix die Länge
einer Strecke, für eine 2 × 2-Matrix der Flächeninhalt des Parallelogramms, das durch die Vektoren v1 , v2 aufgespannt wird und für eine
3 × 3-Matrix ist es das orientierte Volumen des Parallelepipeds30 , der
von den Vektoren v1 , v2 , v3 aufgespannt wird. Orientiert deshalb, weil
das Volumen auch negativ sein kann, wenn z.B. Mat1 (K) 3 a < 0 gilt,
oder wenn v2 zu v1 in Richtung des positiven mathematischen Drehsinns31 liegt. Im Dreidimensionalen kann man die Orientierung des Volumens mit der Schraubenregel ermitteln. Dreht man eine Schraube
mit Rechtsgewinde auf der v1 − v2 -Ebene von v1 in Richtung v2 und
die Schraube windet sich daraufhin in Richtung v3 , dann ist das Volumen positiv anderenfalls negativ. Außerdem kann man sich mit Mitteln
der Schulgeometrie bezüglich, der von v1 und v2 aufgespannten, Fläche
überzeugen, dass
ist ein Prisma dessen Grund- und Deckfläche Parallelogramme sind; ein Prisma ist
ein Körper dessen Grund- und Deckfläche kongruente Polygone sind, die in parallelen
Ebenen liegen und dessen begrenzende Seitenflächen Parallelogramme sind.
31
gegen den Uhrzeigersinn
30
Repetitorium
68
lineare Algebra
2 Matrizen
S 113.1
S 113.2
S 113.3
Determinante
F(v1 , v2 ) = F(v1 , v2 + v1 ) = F(v1 + v2 , v2 ) und dass
aF(v1 , v2 ) = F(av1 , v2 ) = F(v1 , av2 ) gilt, falls die Vektoren linear unabhängig sind.
F(v1 , v2 ) = 0, falls die Vektoren linear abhängig sind.
2
Die ersten beiden Eigenschaften von F sollen die entscheidenenden Eigenschaften der Determinantenfunktion sein.
D 90
Gelten für eine Funktion ∆ : Matn (K) → K die Eigenschaften
DF 90.1 Die Bilder von A, B ∈ Matm,n (K) sind identisch falls B aus A
entsteht indem eine Spalte von A zu einer anderen von A addiert
wird.
DF 90.2 Das Bild von B ist das Produkt von a ∈ K und A, falls B aus A
durch Multiplikation einer Spalte A’s mit dem Skalar a entsteht.
Dann heißt die Funktion ∆ Determinantenfunktion auf Matn (K).
2
S 114.1
S 114.2
Mittels dem Begriff der Elementarmatrix D 71.3 und den Sätzen S 89.4,
S 89.3 lassen sich DF 90.1 und DF 90.2 auch wie folgt formulieren.
Das Bild von A einer Determinantenfunktion ist identisch mit dem Bild
des Produkts von A und Fλµ .
Das Bild des Produkts von A und Fλ (a) ist das Produkt von a und
dem Bild von A.
S 114.3
Daraus folgt mit S 91, dass es zu jedem Q aus der allgemeinen linearen Gruppe ein c aus K\{0} gibt, so dass für alle A aus Matn (K) gilt
∆(AQ) = c∆(A).
S 114.4
Und mit Hilfe von DF 90.2 gilt, dass ∆(B) = 0∆(A) falls A eine Nullspalte enthält, also dass Bild von A Null ist.
Womit die Determinante einer n-reinigen quadratischen Matrix Null ist
falls diese nicht vollen Rang hat.
Ist das Bild der Determinantenfunktion von 1n mit Null identisch, dann
verschwindet mit S 114.5, 114.3 (∆(A) = ∆(1n A) = c∆(1n ) = 0) auch
jedes Bild einer anderen Matrix aus Matn (K)
Seien im Weiteren ∆1 und ∆2 Determinantenfunktionen und a1 , a2 aus
K.
Dann ist auch
S 114.5
S 114.6
S 114.7
∆ : Matn (K) −→ K, A 7−→ ∆(A) := a1 ∆1 (A) + a2 ∆2 (A)
S 114.8
eine Determinantenfunktion.
Mit dieser Erkenntnis folgt, dass ∆(1n )∆2 (A) = ∆2 (1n )∆1 (A), da
∆ : Matn (K) → K, A 7→ ∆(A) := ∆1 (1n )∆(A) − ∆2 (1n )∆1 (A)
Repetitorium
69
lineare Algebra
2 Matrizen
Determinante
eine Determinantenfunktion ist, für die gilt, dass das Bild der Einheitsmatrix Null ist, dass sie also mit S 114.6 alle Matrizen aus der Menge
der n-reihigen quadratischen Matrizen auf die Null abbildet.
S 114.9
Weiter gilt, verschwindet ∆1 nicht identisch, dann ist auch das Bild der
n-reihigen Einheitsmatrix von Null verschieden, setzt man nun noch a
auf den Quotienten von ∆2 (1n ) und ∆1 (1n ), dann ist das Produkt von
a und ∆1 (A) identisch mit ∆2 (A).
S 114.10
Ist das Bild der n-reihigen Einheitsmatrix bezüglich einer Determinantenfunktion das Neutrale Element der Multiplikation, dann ist das Bild
des Produktes von A und B identisch mit dem Produkt der jeweiligen
Bilder von A und B.
2
Nun soll vorerst der Existenz- und Eindeutigkeitssatz zur Determinanten ohne Beweis angegeben werden.
S 115.1
S 115.2
S 115.3
D 91
Es gibt genau eine Determinantenfunktion det : Matn (K) → K auf
Matn (K) mit det(1n ) = 1 (siehe S 114.8, 114.4).
Die Funktion det ist spaltenmultilinear, d.h. die Abbildung
Kn → K, x 7→ det (v1 , . . . , vj−1 , x, vj+1 , . . . , vn )
ist linear.
Ist ∆ eine Determinantenfunktion auf Matn (K), dann ist das Bild von
A bezüglich ∆ identisch mit dem Produkt von ∆(1n ) und det(A) für
2
alle n-reihigen quadratischen Matrizen (siehe S 114.8, 114.4).
Die gerade genannte eindeutig bestimmte Determinantenfunktion auf
Matn (K), die der Einheitsmatrix die Eins zuordnet, heißt Determinante von Matn (K) und wird mit det bezeichnet, man setzt det A := det(A)
und sagt det A ist die Determinante von A.
2
Für den Fall n = 1, also det : Mat1 (K) → K ist det die Identität D 9.
Für den Fall n = 2 kann man nachrechnen, dass, wie in D 82 schon for
muliert, det ac db := ad−bc die zu det gehörende Abbildungsvorschrift
ist. Für den Fall n = 3 lässt sich nachrechnen, dass
det(A) = a11 a22 a33 +a12 a23 a31 +a13 a21 a32 −a31 a22 a13 −a32 a23 a11 −a33 a21 a12 .
Die ersten Faktoren der drei Summanden erhält man indem man die
erste Zeile abschreitet, den jeweils nächsten Faktor indem man eine Zeile nach unten und eine Spalte nach rechts geht. Ist rechter Hand keine
Spalte mehr beginnt man wieder mit der ersten. Für die Subtrahenden
gilt analoges, nur dass sich die drei ersten Faktoren durch sukzessives
Abschreiten der letzten Zeile ergeben und die jeweils folgenden Faktoren ergeben sich indem man eine Zeile nach oben wandert und eine
Repetitorium
70
lineare Algebra
2 Matrizen
S 116.1
S 116.2
Determinante
Spalte nach rechts geht. Eine andere Merkregel geht auf den Mathematiker Sarrus [Lex00, S. 93] zurück und wird auch Jägerzaunregel
genannt.
Nun sollen einige Eigenschaften der Determinante zusammengetragen
werden.
Mit S 114.5 folgt unmittelbar, dass die Determinante einer Matrix verschwindet, wenn diese linear abhängige Spalten/Zeilen, also keinen vollen Rang hat.
Die wichtige Erkenntnis aus S 114.10 sei an dieser Stelle nocheinmal
wiederholt. Die Determinante des Matrizenproduktes von A und B lässt
sich mit dem Produkt der Determinanten von A und B identifizieren.
S 116.3
Die Determinante einer Matrix A lässt sich mit der Determinante der
Transponierten von A identifizieren. Denn der Rang der Transponierten stimmt mit dem von A überein, also verschwindet die Determinante
von t A wie die von A, wenn A keinen vollen Rang hat. Hat A vollen
Rang, existieren mit S 91(iv) Elementarmatrizen P1 , . . . , Pr deren Produkt A ergibt und deren Transponierte als Produkt in umgekehrter
Reihenfolge t A ergibt. Mit S 116.2 kann also die Determinante von A
als Produkt der Determinanten der Pi dargestellt werden und analoges
gilt für t A und mittels des Kommutativgesetzes der Körpermultiplikation können die Determinanten von t Pi so geordnet werden, dass nur
noch det Pi = det t Pi gezeigt werden muss. Da t Pi und Pi Elementarmatrizen sind gilt mit S 114.1 det(1n Pi ) = det(1n t Pi ) = 1, falls Pi = Fλµ
und für Pi = Fλ (a) gilt trivialerweise Fλ (a) = t Pi .
Dadurch können nun die nachfolgenden Aussagen für Spalten und Zeilen gemacht werden.
S 116.4
Mit S 115.2 ergibt sich, dass die Determinanten in jeder Spalte/Zeile
linear ist.
det(v1 ,...,vj−1 ,av+a 0 v 0 ,vj+1 ,...,vn )=a det(v1 ,...,v,...,vn )+a 0 det(v1 ,...,v 0 ,...,vn )
S 116.5
Mit der Linearität lässt sich folgern, dass die Determinante homogen
vom Grade n ist, das heißt det(aA) = an det A.
S 116.6
Als Verallgemeinerung von S 113.1 kann man die Invarianz der Determinante bezüglich der Addition einer Spalte/Zeile zur Linearkombination
anderer Spalten/Zeilen festhalten.
Die Determinante ändert ihr Vorzeichen, wenn man zwei Spalten/Zeilen
vertauscht.
S 116.7
|v, w| := det(. . . , v, . . . , w, . . . ) ⇒ |v, w| = |v, v + w| = |v − (v + w), v + w| = |−w, v|
S 116.8
Und schließlich noch ein Äquivalenzkriterium für die Invertierbarkeit
von Matrizen. Eine n-reihige quadratische Matrix A ist genau dann
Repetitorium
71
lineare Algebra
2 Matrizen
Determinante
invertierbar, wenn die Determinante von A nicht verschwindet. Es folgt,
dass die Determinante der Inversen von A mit dem Reziproken der
Determinante von A identisch ist.
2
S 117.1
S 117.2
Auch wenn noch keine allgemeine Formel zur Determinantenberechnung abgeleitet wurden, können mit den bisherigen Aussagen zwei aufeinander aufbauende Sonderfälle untersucht werden, auf die dann allgemeine Formeln zur Determinantenberechnung zurückgeführt werden
können.
Ist A eine obere Dreiecksmatrix D 70.6, dann gilt aufgrund der Spaltenmultilinearität det A = a11 · · · · · ann det A 0 und die Diagonalkomponenten von A 0 sind alle Eins. Nun kann man mit S 116.6 und der
Methodik die im Beweis von S 82 für (iii) ⇒ (iv) verwendet wurde, A 0
zur Einheitsmatrix umgeformt werden ohne die Determinante von A 0
zu ändern, also detA 0 = 1 und somit detA = a11 · · · · · ann .
Die Determinante einer Blockmatrix, deren Hauptdiagonale nur aus
zwei quadratischen Blöcken besteht und deren Nebendiagonale einen
Nullblock enthält, ist das Produkt der Determinanten der beiden Blöcke
B = (det A)(det D) = det A 0
der Hauptdiagonalen: det A
0 D
C D mit A ∈
Matr (K), B ∈ Matr,n-r (K), C ∈ Matn-r,r (K) und D ∈ Matn-r (K). Fixiert
man B und D auf zwei beliebig gewählte Matrizen, dann kann mit
B
∆ : Matr (K) → K, ∆(A) := det A
0 D eine Determinantenfunktion auf
Matr (K) definiert werden. Die in D 90 geforderten Eigenschaften lassen
sich verifizieren, da die Spalten von A in der Blockmatrix mit Nullen
aufgefüllt werden. So kann man mit S 115.3 folgern
1r B
B
det A
0 D = ∆(A) = ∆(1r ) det A = (det A) det 0 D .
Mit S 116.3 kann man D durch t D ersetzen und analog zu ∆ auf
Matn-r (K) ein ∆ 0 (D) := det 10r tBD definieren was zu
1
B B
(det A) det 0r t (t D) = (det A)∆ 0 (t D) = (det A)(det D) det 10r 1n−r
führt, wobei der letzte Faktor die Determinante einer oberen Dreiecksmatrix ist, deren Komponenten in der Hauptdiagonale alle Eins sind.
Mit dem vorstehenden Satz ist damit die Determinante des letzten Faktors Eins und somit die Behauptung bewiesen.
2
Um eine geschlossenen Formel zur Inversenberechnung einer invertierbaren Matrix zu entwickeln ist die nachstehende Begriffsbildung nützlich. A ist im Weiteren eine n-reihige quadratische Matrix mit den
Komponenten aij und den Spalten vj mit 1 6 i, j 6 n.
D 92.1
Die Skalare
a#
ij := det(v1 , . . . , vi−1 , ej , vi+1 , . . . , vn ) ∈ K
heißen Kofaktoren oder algebraisches Komplement von A
Repetitorium
72
lineare Algebra
2 Matrizen
Determinante
D 92.2
Die Matrix A# := (a#
ij )ij heißt die Komplementärmatrix oder adjungierte Matrix bzw. die Adjunkte von A
D 92.3
Mit Aij aus Matn-1 (K) wird die Matrix bezeichnet, die aus A entsteht
durch entfernen der i-ten Zeile und i-ten Spalte. Die Determinante von
Aij heißt (n − 1)-reihige Unterdeterminante
2
S 118.1
S 118.2
Nun kann folgender Satz formuliert werden.
Der (ij)-te Kofaktor von A ist identisch mit der (n − 1)-reihigen Unterdeterminante von Aji mit der (i + j)-ten Potenz von −1 als Vorzeichen.
Die Transponierte der Adjunkten von A lässt sich mit der adjungierten
transponierten von A identifizieren.
2
#
Definitionsgemäß gilt aij = det(v1 , . . . , vi−1 , ej , vi+1 , . . . , vn ) bringt man
ej durch sukzessive Spaltenvertauschungen in die erste Spalte hat die
Determinante mit S 116.7 (i − 1)-mal das Vorzeichen gewechselt. Macht
man nun durch sukzessive Zeilenvertauschungen die j-te Zeile zur ersten Zeile, dann hat die Determinante weitere (j−1)-mal das Vorzeichen
gewechselt und es gilt
2
i−1
0
0
a#
(−1)j−1 det(e1 , v10 , . . . , vi−1
, vi+1
, . . . , vn0 )
ij = (−1) (−1)
wobei in vk0 die j-te Komponente an erster Stelle steht und alle Komponenten bis einschließlich zur j-ten um eins nach unten gerutscht sind.
Damit erhält man schließlich mit S 117.2
1 u
i+j
a#
=
(−1)
det
= (−1)i+j det Aji
0
A
ij
ji
Um sich S 118.2 klar zu machen setzt man B = t A mit bij = aji und
es folgt Bij = t (Aji ), also gilt mit S 118.1, 116.3
i+j
b#
det Bji = (−1)i+j dett (Aij ) = (−1)i+j det Aij = a#
ij = (−1)
ji
S 119
und somit (t A)# = B# = t (A# ).
Damit kann der Zentrale Satz formuliert werden, dass das Matrizenprodukt von A und deren Adjunkten kommutativ ist und sich mit der
Diagonalmatrix identifizieren lässt, deren Diagonalkomponenten ausschließlich die Determinante von A sind. Also AA# = (det A)1n = A# A
oder in einer algebraisch etwas zugänglicheren Form
Pn
Pn
#
( k=1 aik a#
kj )ij = (δij )ij (det A) = (
k=1 aik akj )ij
2
Für eine Komponente der rechten Matrix folgt dann mit K 31.2, S 116.4
und D 92.1
Pn
k=1
a#
ik akj =
wobei sich
Pn
k=1
Pn
Pn
k=1
akj ek ,vi+1 ,...,vn )
k=1
akj ek als der j-te Spaltenvektor von A erweist, also
k=1
a#
ik akj = det(v1 , . . . , vi−1 , vj , vi+1 , . . . , vn ).
Pn
Repetitorium
akj det(v1 ,...,vi−1 ,ek ,vi+1 ,...,vn )=det(v1 ,...,vi−1 ,
73
lineare Algebra
2 Matrizen
Determinante
Für den Fall j = i steht dort also det A für j 6= i sind die Vektoren
linear abhängig also ihre Determinante Null, also gilt
(det(v1 , . . . , vi−1 , vj , vi+1 , . . . , vn ))ij = (δij (det A))ij
und somit A# A = (det A)1n diese Beziehung gilt natürlich auch für
t
A =: B womit gilt
(det A)1n = (det t A)1n = (det B)1n = t ((det B)1n ) = t (B# B) = t Bt B# = AA# ,
was die behauptete Kommutativität bestätigt.
S 120
Nimmt man zusätzlich noch an, dass A invertierbar ist, dann gilt
(det A)1n = AA# ⇔ 1n = A det1 A A# ⇔ A−1 1n = A−1 A det1 A A# ⇔ A−1 =
1
#
det A A
womit eine geschlossene Formel für das Inverse einer Matrix abgeleitet
ist.
2
Als nächstes soll eine rekursive Formel zur Determinantenberechnung
einer n-reihigen quadratischen Matrix A entwickelt werden, indem die
Determinantenberechnung von A auf die Berechnung einer (n − 1) reihige Unterdeterminante zurückgeführt wird:
det A
P
= det(v1 , . . . , vj−1 , n
i=1 aij ei , vj+1 , . . . , vn )
Pn
=
i=1 aij det(v1 , . . . , vj−1 , ei , vj+1 , . . . , vn )
Pn
j−1
=
det(ei , v1 , . . . , vj−1 , vj+1 , . . . , vn )
i=1 aij (−1)
Pn
j−1
0
0
=
(−1)i−1 det(e1 , v10 , . . . , vj−1
, vj+1
, . . . , vn0 )
i=1 aij (−1)
Pn
j+i
=
det 10 Auij
i=1 aij (−1)
Pn
j+i
=
det(1) det Aij
i=1 aij (−1)
Pn
j+i
=
det Aij
i=1 aij (−1)
S 121.1
S 121.2
(D 69.7, S 36)
(S 115.2)
(S 116.7)
(S 116.7)
(S 70.7)
(S 117.2)
(D 91)
So dass der Entwicklungssatz nach der j-ten Spalte festgehalten werden
kann.
Die Determinante einer n-reihigen quadratischen Matrix lässt sich mit
Pn
j+i
det Aij identifizieren.
i=1 aij (−1)
Analog dazu der Entwicklungssatz nach der i-ten Zeile
P
i+j
det Aij
det A = n
j=1 aij (−1)
2
Mit diesen Ergebnissen lässt sich eine Determinantenformel für die
Vandermond Matrix V := (ai−1
)ij ableiten. Zunächst geht man zur
j
j−1
t
Transponierten V = (ai )ij über. Alle Komponenten der ersten Spalte von V sind mit a0i Eins. Zieht man für j = n, . . . , 2 das a11 -Fache
der (j − 1)-ten Spalte von der j-ten ab S 116.6, dann verschwindet die
erste Zeile bis auf die erste Komponente, die Eins ist. Für die übrigen
Komponenten mit Ausnahme der ersten Spalte gilt aj−1
− aj−2
a1 =
i
i
j−2
1
1
(ai − a1 )ai . Entwickelt man die Determinante nach der ersten Zeile
dann folgt det(aj−1
)ij = 1 · det((a1i − a11 )aj−2
)26i,j6n . Klammert man
i
i
nun noch aus jeder Zeile vermöge der Spaltenmultilinearität (a1i − a11 )
Repetitorium
74
lineare Algebra
2 Matrizen
S 122
Determinante
Qn
aus ergibt sich det(aj−1
)ij = i=2 (ai −a1 ) det(aj−2
)26i,j6n . Offensichti
i
lich sind wieder alle Komponenten der ersten Spalte von (aij−2 )26i,j6n
Eins ebenso wie die erste Zeile bis auf die erste Komponente wieder verschwindet wenn man das a22 Fache der (j − 1)-ten Spalte von der j-ten
abzieht wobei j die Spaltenindizes von n bis 2 durchläuft. Entwickelt
man wieder nach der ersten Zeile und zieht (ai − a2 ) heraus, dann folgt
Qn
Qn
det(aj−1
)ij = i=2 (ai − a1 ) i=3 (ai − a2 ) det(aj−3
)36i,j6n .
i
i
Diese Umformungen legen die Vermutung nahe, dass zu guter Letzt gilt
Qn−1 Qn
det(aj−1
)ij = k=1 i=k+1 (ai − ak ).
i
2
Diesen rekursive Zusammenhang kann man per vollständige Induktion
über n formal beweisen. Wobei es im Induktionsschritt vorteilhaft ist
von n − 1 nach n zu schließen.
ö Nachdem mit den Entwicklungssätzen eine rekursive Methode zur
Determinantenberechnung entwickelt wurde, soll nun noch eine geschlossene Formel in Abhängigkeit der Matrizenkomponenten entwickelt werden. Der sogenannte Leibnizsche Darstellungssatz soll zunächst für
den Fall A ∈ Mat2 (K) entwickelt werden, um die Vorgehensweise ausführlich und dennoch überschaubar darzustellen.s
det A
P
P
= det(v1 , v2 ) = det( 2i1 =1 ai1 1 ei1 , 2i2 =1 ai2 2 ei2 )
P
P
= a11 det(e1 , 2i2 =1 ai2 2 ei2 ) + a21 det(e2 , 2i2 =1 ai2 2 ei2 )
P2
P2
=
i2 =1 ai2 2 ei2 )
i1 =1 ai1 1 det(ei1 ,
P2
=
i =1 ai1 1 (a12 det(ei1 , e1 ) + a22 det(ei1 , e2 ))
P21
P2
=
i1 =1 ai1 1
i2 =1 ai1 2 det(ei1 , ei2 )
P2
P2
=
i1 =1
i2 =1 ai1 1 ai1 2 det(ei1 , ei2 )
(S 36)
(S 115.2)
(D 38)
(S 115.2)
(D 38)
(S 16.4)
Ist i1 = i2 = i dann Folgt, dass der dritte Faktor des Summanden
det(ei1 , ei2 ) mit det(ei , ei ) identisch ist, und somit verschwindet. Es
sind also nur die Indexkombinationen von Interesse deren Indizes (paarweise32 ) verschieden sind, dass ist aber genau die Menge aller Permutationen von B = {1, 2}, also die Menge aller Bijektionen von B in B:
S2 = {π1 , π2 } mit
π1 : B → B, π1 (1) := 1, π1 (2) := 2,
P2
i1 =1
=
P2
i =1
2
P2!
ai1 1 ai1 2 det(ei1 , ei2 )
πk=1 ∈S2
π2 : B → B, π2 (1) := 2, π2(2) := 1
aπk (1),1 aπk (2),2 det(eπk (1) , eπk (2) )
= a11 a22 det(e1 , e2 ) + a21 a12 det(e2 , e1 )
Und mit det(e1 , e2) = 1 und det(e2 , e1 ) = −1 folgt die aus D 82 schon
bekannte Determinantenforme a11 a22 − a21 a12 für 2 × 2-Matrizen. Berücksichtigt man, dass die Determinante einer n-reihigen Matrix, die
32
im Hinblick auf den allgemeinen Fall
Repetitorium
75
lineare Algebra
3 Lineare Gleichungssysteme
nur aus paarweise verschiedenen Einheitsvektoren besteht, sich durch
entsprechende Spaltenvertauschungen in die Einheitsmatrix transformieren lässt, so dass allgemein det(eπk (1) , . . . , eπk (n) ) entweder −1 oder
1 ist je nach Anzahl der Vertauschungen durch die Permutation πk .
Man kann zeigen, dass die Abbildung
Q
: Sn −→ {−1, 1}, π 7−→ (π) := 16i,j6n π(i)−π(j)
,
i−j
dass gesuchte Vorzeichen zu einer Permutation π liefert. Die Idee hierbei
basiert auf der Ordnung der natürlichen Zahlen mit der folgt, dass ein
Vertauschen des i-ten Einheitsvektors mit dem j-ten – wobei o.B.d.A.
i < j angenommen wird – genau ein Indexpaar mehr zur Folge hat für
das i < j, π(i) > π(j) gilt, was man auch einen Fehlstand nennt. Ist
γ(π) die Anzahl der Fehlstände, gilt (π) = (−1)γ(π) . Ersetzt man nun
an den entsprechenden Stellen des gerade besprochenen Spezialfalls die
2 durch n und fügt passend Auslassungspunkte hinzu, dann lässt sich
die Herleitung für den Fall A ∈ Matn (K) verallgemeinern und führt zu
folgender geschlossener Formel für die Determinantenberechnung einer
n × n-Matrix
n!
P
det A =
aπk (1),1 · · · aπk (n),n (πk ) =
πk=1 ∈Sn
n!
P
a1,πk (1) · · · an,πk (n) (πk )
πk=1 ∈Sn
Die zweite Identität erhält man durch den Übergang zur Transponierten
von A.
3 Lineare Gleichungssysteme
D 93.1
D 93.2
Mit den Abschnitten zur Vektorraum- und Matrizentheorie wurde nun
genug Material angehäuft um, wie versprochen, eine Motivation für
diese Abschnitte nachzureichen. Dies soll in Form einer Lösungstheorie
für linearer Gleichungssysteme geschehen.
Die Gleichung a11 x1 + · · · + a1n xn = b1 mit a1i ∈ K heißt lineare Gleichung über K mit den Koeffizienten a11 , . . . , a1n, den Unbekannten
x1 , . . . , xn und dem Ergebnis b1 .
Verschwindet das Ergebnis, dann spricht man von einer homogenen
linearen Gleichung über K .
2
Beispielsweise hat die homogene lineare Gleichung 0x1 = 0 mindestens
zwei Lösungen wegen K 31.1 und S 13.1. Die lineare Gleichung 0x = 1
hingegen hat wegen S 13.1 keine Lösung.
D 94.1
Repetitorium
76
lineare Algebra
3 Lineare Gleichungssysteme
Sind m von einander abhängige lineare Glei- a11 x1 + ··· + a1n xn = b1
..
..
..
..
chungen zu nebenstehenden rechteckigen Sche.
.
.
.
am1 x1 + ··· + amn xn = bm
ma angeordnet, dann spricht man von einem
linearen Gleichungssystem über K von m Gleichungen in n Unbekannten.
D 94.2
D 95.1
D 95.2
D 95.3
D 95.4
D 95.5
Gilt in dem voranstehenden Gleichungsschema b1 = · · · = bm = 0,
dann spricht man von einem homogenen linearen Gleichungssystem
über K von m Gleichungen in n Unbekannten.
2
Pn
j=1 a1j xj = b1
Unter Hinzunahme des Summenzeichens lässt sich das
.
..
Gleichungssystem in der kompakteren nebenstehenden Pn ..
.
Pn
j=1 amj xj = bm
Form schreiben, das sich wiederum zu j=1 aij xj = bi
mit 1 6 i 6 m zusammenfassen lässt, und nachfolgende Definitionen
motiviert.
P
Sei G := j=1 aij xj = bi mit 1 6 i 6 m ein lineares Gleichungssystem
von m Gleichungen in n Unbekannten über K.
Die aij heißen Koeffizienten von G
Fasst man die Koeffizientenspalten als m-dimensionale Spaltenvektoren
vj = t (a1j , . . . , amj ) auf und setzt w := t (b1 , . . . , bm ) ∈ Km , dann kann
Pn
Pn
G auch als j=1 vj xj = w bzw. j=1 xj vj = w geschrieben werden33 ,
in der sogenannten Vektorform.
Dann heißen die vj Spaltenvektoren von G.
Ein Spaltenvektor t (x1 , . . . , xn ) heißt Lösungsvektor von G falls mit
P
1 6 i 6 m gilt j=1 aij xj = bi .
w = t (b1 , . . . , am ) ∈ Km heißt Ergebnisvektor von G.
D 95.6
Man setzt L(G) := {x ∈ Kn | x ist Lösung von G} und nennt L(G)
Lösungsmenge von G.
D 95.7
Ein Gleichungssystem heißt lösbar, falls die Lösungsmenge von G nicht
leer ist.
G heißt universell lösbar, wenn es für alle w ∈ Km lösbar ist.
G heißt homogen, falls w der Nullvektor ist.
D 95.8
D 95.9
D 95.10
D 95.11
G heißt inhomogen, falls w von Null verschieden ist.
Pn
Das lineare Gleichungssystem G0 :=
j=1 xj vj = 0 heißt das zu G
gehörige homogene lineare Gleichungssystem oder kürzer die Homogenisierung von G.
2
Mit Hilfe des Matrizenkalküls und der darin entwickelten Matrizenmultiplikation lassen sich die Spaltenvektoren von G zu einer Matrix
A := (v1 , . . . , vn ) ∈ Matm,n (K) zusammenfassen deren Multiplikation
33
Siehe D 47.3 und K 31.2
Repetitorium
77
lineare Algebra
3 Lineare Gleichungssysteme
Lösungsmenge eines LGS
mit einem n-dimensionalen Spaltenvektor x := t(x1 , . . . , xn ) ∈ Kn der
linken Seite von G entspricht.
D 96.1
D 96.2
D 96.3
G lässt sich also auch in der Matrixform Ax = w darstellen.
Die Matrix A heißt Koeffizientenmatrix von G
Fügt man der Koeffizientenmatrix den Ergebnisvektor als (n + 1)-te
Spalte an, dann heißt die so entstandene Matrix (A, w) ∈ Matm,n+1 (K)
erweiterte (Koeffizienten)Matrix von G.
2
3.1 Lösungsmenge eines LGS
Der Einfachheit halber soll zunächst ein homogenes lineares GleichungsPn
system G := j=1 aij aj = 0 mit 1 6 i 6 m betrachtet werden. Offensichtlich ist x1 = · · · = xn = 0 immer eine Lösung von G, also enthält
die Lösungsmenge von G stets den Nullvektor (,ist also nie leer). Nimmt
man an, dass die n-dimensionalen Vektoren x, y aus der Lösungsmenge
von G sind, dann folgt
Pn
Pn
Pn
j=1 aij yj = a0 + b0 = 0.
j=1 aij xj + b
j=1 aij (axj + byj ) = a
damit gilt also, dass (ax + by) aus L(G) ist, vorausgesetzt x und y sind
aus der Lösungsmenge. Man kann also zusammenfassend festhalten,
S 123
dass sich auf der Lösungsmenge eines homogenes LGS von m-Gleichungen in n Unbekannten ein Unterraum des Kn definieren lässt.
2
D 97
Der n-dimensionale Nullvektor, der stets Lösung eines homogenen LGS
von m Gleichungen in n Unbekannten ist, heißt triviale Lösung von
G.
2
S 124.1
S 124.2
Geht man nun zu einem inhomogenen linearen Gleichungssystem von
P
m Gleichungen in n Unbekannten G := n
j=1 aij aj = bi mit 1 6 i 6
0
m und dessen Homogenisierung G über und nimmt an, dass v eine
Lösung von G ist. Ist y ein beliebiger Vektor aus dem Kn , dann existiert
aufgrund der Eindeutigkeit der Körperaddition genau ein x aus Kn , so
dass die Gleichung x + v = y erfüllt ist und mit dem Umstand das v
eine Lösung von G ist folgt
Pn
Pn
Pn
j=1 aij yj =
j=1 aij (vj + xj ) = bi +
j=1 aij xj .
Pn
Offensichtlich ist y genau dann eine Lösung von G – also j=1 aij yj =
P
bi –, wenn n
j=1 aij xj = 0 gilt, also x aus dem Lösungsraum der Homogenisierung von G ist.
Ist man in Besitz eines Lösungsvektors v eines linearen Gleichungssystems G, dann ist die Lösungsmenge von G durch die Lösungsmenge der Homogenisierung G0 von G vollständig bestimmt, denn es gilt
L(G) = {v + x | x ∈ L(G0 )}.
Damit ergibt sich – vorausgesetzt G ist lösbar –, dass G0 genau dann
Repetitorium
78
lineare Algebra
3 Lineare Gleichungssysteme
Lineare Abbildungen
nur die triviale Lösung besitzt, wenn G genau eine Lösung besitzt. 2
3.2 Lineare Abbildungen
Um eine Verbindung zu linearen Abbildungen herzustellen rechnet man
leicht nach, dass die Abbildung f vom n-dimensionalen in den mdimensionalen Spaltenraum mit der Abbildungsvorschrift
Pn
Pn
Pn
t
(x1 , . . . , xn ) 7−→ t ( j=1 a1j xj , . . . , j=1 amj xj ) = j=1 xj vj
ein Homomorphismus ist, indem man (at (x1 , . . . , xn ) + bt (y1 , . . . , yn ))
in Pf einsetzt.
P
Pn
!
!
n
y1 x1 a n
j=1 a1j (axj +byj )
j=1 a1j xj + b
j=1 a1j yj
.
.
.
..
= af( .. )+bf( ... )
=
..
..
.
Pn
j=1
amj (axj +byj )
a
Pn
j=1
amj xj + b
Pn
j=1
amj yj
xn
yn
Der Rang von f muß dann gleich dem Rang von {v1 , . . . , vn } sein,
da das Bild die Menge aller Linearkombination von v1 , . . . , vn , also
Lin(v1 , . . . , vn ) ist. Mit diesem Zusammenhang kann man die Lösungmenge eines homogenen linearen Gleichungssystem bzw. der Homogenisierung eines linearen Gleichungssystems als den Kern von f interpretieren und analog zu S 70.1 mit S 123 die Dimensionsformel formulieren:
S 125.1
Die Dimension des Lösungsraums eines homogenen LGS ist identisch
mit der Differenz von n und dem Rang der {v1 , . . . , vn }
S 125.2
Für die Matrixdarstellung eines linearen Gleichungssystems gilt, die
Dimension des Lösungsraums ist die Differenz von n und dem Rang
von A.
S 125.3
Daran schließt sich unmittelbar an, dass der Lösungsraum eines homogenen linearen Gleichungssystems von m Gleichungen in n Unbekannten wenigstens die Dimension n − m hat. Damit hat das homogene
LGS sicher dann eine nichttriviale Lösung, wenn es mehr Unbekannte
als Gleichungen hat.
2
3.3 Lösbarkeitskriterien
Nachdem eine Gewisse Vorstellung über die Lösungsmenge eines LGS
entwickelt wurde und es mit 0x = 1 offensichtlich auch LGS gibt die
nicht lösbar sind, stellt sich die Frage nach Lösbarkeitskriterien linearer
Gleichungssysteme.
3.3.1 Rangkriterium
Pn
Betrachtet man die Vektordarstellung j=1 xj vj = w kann man dies
offensichtlich als den Versuch interpretieren x1 , . . . , xn zu finden, so
dass w als Linearkombination der v1 , . . . , vn darstellbar ist, was mit
S 55.5 genau dann der Fall ist, wenn der Rang der Spaltenvektoren
Repetitorium
79
lineare Algebra
3 Lineare Gleichungssysteme
Lösbarkeitkriterien
eines LGS identisch ist mit dem Rang seiner erweiterten Matrix. Es
kann also nachstehender Äquivalenzsatz festgehalten werden.
S 126
Sei G ein lineares Gleichungssystem von m Gleichungen in n Unbekannten.
(i)
⇐⇒ G ist lösbar.
(ii)
⇐⇒ w ist aus der linearen Hülle der Spaltenvektoren von G.
(iii)
⇐⇒ Der Rang der Spaltenvektoren lässt sich mit dem Rang der Spaltenvektoren vereinigt mit w identifizieren.
2
Ist der Rang von {v1 , . . . , vn } gleich m, dann folgt mit S 55.3 dass
Lin(v1 , . . . , vn ) den m-dimensionalen Spaltenraum erzeugt und somit
jeden beliebigen Vektor w.
S 127
Ein lineares Gleichungssystem von m Gleichungen in n Unbekannten
ist genau dann universell lösbar, wenn {v1 , . . . , vn } den Rang m hat. 2
3.3.2 Matrixkriterien
S 128
S 129
S 130
Mittels der Matrixdarstellung eines linearen Gleichungssystems und des
Rangbegriffs lassen sich einige Lösungskriterien für LGS formulieren.
Nachfolgendes ist nichts anderes als ein Umschreiben des Vorstehenden
Äquivalenzsatzes für die Matrixdarstellung
Sei G ein lineares Gleichungssystem von m Gleichungen in n Unbekannten in Matrixdarstellung.
(i)
⇐⇒ G ist lösbar.
(ii)
⇐⇒ w ist aus dem Bild der Koeffizientenmatrix von G,
(iii)
⇐⇒ Der Rang der Koeffizientenmatrix von G ist identisch mit dem
Rang der erweiterten Matrix von G.
2
Auch S 127 lässt sich für die Matrixdarstellung übersetzen.
Ein lineares Gleichungssystem von m Gleichungen in n Unbekannten ist
genau dann universell lösbar, wenn der Rang der Koeffizientenmatrix
der Anzahl der Gleichungen Entspricht.
2
In Anlehnung an S 124.2 in Verbindung mit linearen Abbildungen kann
der Äquivalenzsatz für die eindeutige Lösbarkeit eines linearer Gleichungssystems in Matrixform formuliert werden.
Sei G ein LGS in Matrixdarstellung Ax = w.
(i)
⇐⇒ G ist eindeutig lösbar.
(ii)
⇐⇒ Der Kern der Koeffizientenmatrix von G ist der Nullraum.
(iii)
⇐⇒ Die Koeffizientenmatrix aus Matm,n (K) von G hat den Rang n. 2
Für die universelle eindeutige Lösbarkeit lässt sich nachstehendes Kriterium festhalten.
S 131
Für jeden Ergebnisvektor ist ein lineares Gleichungssystem von m GleiRepetitorium
80
lineare Algebra
3 Lineare Gleichungssysteme
Lösen eines LGS
chungen in n Unbekannten genau dann eindeutig lösbar, wenn die Anzahl der Gleichungen der Anzahl der Unbekannten entspricht und wenn
die Koeffizientenmatrix invertierbar ist.
2
Beschränkt man sich auf Gleichungssysteme deren Anzahl der Gleichungen sich mit der Anzahl der Unbekannten identifizieren lässt, dann
lassen sich die bisherigen Ergebnisse in dem folgenden Äquivalenzsatz
zusammenfassen.
S 132
Sei A eine n-reihige quadratische Matrix
(i)
⇐⇒ Für jeden Ergebnisvektor w ∈ Kn ist das LGS Ax = w lösbar.
(ii)
⇐⇒ Für jeden Ergebnisvektor w ∈ Kn ist das LGS Ax = w eindeutig
lösbar.
(iii)
⇐⇒ Es gibt ein einen Ergebnisvektor w, so dass das LGS Ax = w
eindeutig lösbar ist.
(iv)
⇐⇒ Das homogene LGS Ax = 0 besitzt nur die triviale Lösung.
(v)
⇐⇒ A ist invertierbar.
(vi)
⇐⇒ Die Determinante von A verschwindet nicht.
Für einen Ergebnisvektor w kann die Eindeutige Lösung von Ax = w
durch x = A−1 w dargestellt werden.
2
Mit S 129 ist der Rang von A mit n identisch, also gilt mit S 130
dass (ii) von (i) impliziert wird. Das (ii) ⇒ (iii) gilt sollte sich von
selbst verstehen. Auch die Implikation von (iii) nach (iv) ergibt sich
mit S 130. Die Dimensionsformel S 125.2 hat zur Folge, dass aus (iv) der
volle Rang von A folgt und mit dem Äquivalenzsatz zur Invertierbarkeit
von Matrizen S 88 wird schließlich (v) impliziert. Der Kreis schließt
sich, da mit der Invertierbarkeit auch die Existenz der Inversen von A
gesichert ist, so dass man für ein beliebiges w ∈ Kn x := A−1 w setzen
kann womit sowohl (i) als auch der Nachsatz des Äquivalenzsatzes gilt.
Die Äquivalenz von (v) und (vi) ergibt sich aus S 116.8
3.4 Lösen eines LGS
In diesem Abschnitt sollen drei Verfahren zum effektiven systematischen lösen von linearen Gleichungssystem von m-Gleichungen in nUnbekannten betrachtet werden.
3.4.1 Gaußsches Eliminationsverfahren
Verschwinden in der ersten Gleichung des LGS alle Koeffizienten und
ebenso b1 , dann lösen alle x1 , . . . , xn aus K die erste Gleichung womit sie
entfallen kann; verschwindet b1 nicht, dann existieren keine x1 , . . . , xn
die diese Gleichung oder die das Gleichungssystem lösen. Geht man
nun also davon aus, dass ein von Null verschiedener Koeffizient in der
Repetitorium
81
lineare Algebra
3 Lineare Gleichungssysteme
Lösen eines LGS
ersten Gleichung existiert, dann kann durch geeignete Umnummerierung der Koeffizienten und Unbekannten (allgemeines kommutativgesetz der Körperaddition) dieser Koeffizient an die erste Stelle gebracht
werden, also a11 6= 0. Schließlich kann man noch beide Seiten der ersten Gleiching mit dem Reziproken von a11 durchmultiplizieren, so dass
a11 = 1. Zieht man nun von der i-en Gleichung (2 6 i 6 m) das ai1 Fache der ersten Gleichung ab, dann fallen offensichtlich die Summanden a21 , . . . , am1 heraus. Da die Addition und Multiplikation mit der
Identität verträglich sind, hat das nach diesem Schritt entstandene LGS
die gleiche Lösungsmenge wie das ursprüngliche LGS. Verfährt man nun
0
0
mit der zweiten Gleichung a22
x2 + · · · + a2n
xn = b20 ebenso wie mit
der Ersten, dann werden die Summanden a32 x2 , . . . , am2x2 Eliminiert
usw. Diese Vorgehensweise führt man min(m, n) − 1 mal durch und
gelangt so zu einer vollständigen Übersicht der Lösungen des linearen
Gleichungssystems von m Gleichungen in n Unbekannten.
Die Operationen im Gaußschen Eliminationsverfahren erfolgten analog zu den in D 76.1 eingeführten elementaren Matrizenumformungen.
So lässt sich dann auch durch den Übergang zur Matrixdarstellung der
Gaußsche Algorithmus entwickeln.
3.4.2 Gaußscher Algorithmus
S 133.1
S 133.2
S 133.3
Sei G := Ax = w ein lineares Gleichungssystem in Matrixdarstellung. Durch iterierte elementare Zeilenumformungen und Spaltenvertauschungen wird die Koeffizientenmatrix A in die Matrix A 0 aus S 82
überführt. Die Zeilenumformungen müssen auch auf den Ergebnisvektor w des linearen Gleichungssystems angewandt werden, und über die
Spaltenvertauschungen muß im Lösungsvektor x Buch geführt werden.
Wird die i-te Spalte der Koeffizientenmatrix mit der j-ten vertauscht,
müssen xi und xj im Lösungsvektor vertauscht werden.
Das damit entstandene Gleichungssystem G 0 := A 0 x 0 = w 0 hat die
Identischen Lösungen wie G.
0
0
= · · · = bm
= 0 gilt.
G besitzt genau dann eine Lösung, wenn bs+1
0
, . . . , xn0 als frei wählbar setzt und
Man löst G 0 dann, indem man xs+1
P
Pn
n
0
0
xs0 = bs0 − j=s+1 arj
xj , . . . , x10 = b10 − j=2 a2j
xj
berechnet. Man berechnet also die i-Unbekannte (1 6 i 6 s) mit
Pn
0
xj
xi0 = bi0 − j=i+1 aij
2
Nach der Durchführung des Gaußschen Algorithmus liegt einer der drei
nachfolgenden Fälle vor.
Repetitorium
82
lineare Algebra
3 Lineare Gleichungssysteme
G ist genau dann lös
bar, wenn es neben-
stehende Form an-
nimmt.
1
∗
0
..
Lösen eines LGS
···
∗
..
.
···
.. . . . .
.
.
.
∗
..
.
..
.
0
···
0
1
∗
···
0
···
···
···
···
···
0
···
···
···
···
···
1
∗
..
.
..
.
G ist genau dann eindeutig
lösbar, wenn es nebenstehende
Form annimmt.
G ist genau dann
unlösbar,
wenn
es nebenstehende
Form annimmt.
∗
1
∗
0
..
···
.
..
.
0
0
..
.
0
..
.
.
···
∗
···
∗
0
···
0
1
∗
···
0
···
···
···
···
···
.
..
.
0
···
···
···
∗
···
..
···
∗
..
.
..
.
xs0
0
xs+1
..
.
0
xn
..
.
..
.
∗
0
..
.
0
x10
..
.
..
.
0
xn
0
x10
0
···
.. . . . .
.
.
.
..
∗
0
..
.
···
..
.
..
.
.
..
.
..
.
.
. ..
.. ..
.
. ∗
···
0
1
···
···
0
..
.
..
0
∗
∗
x10
..
.
..
.
xs0
0
xs+1
..
.
0
xn
=
=
=
b10
..
.
..
.
bs0
0
..
.
0
b10
..
.
..
.
0
bs
0
..
.
0
b10
..
.
..
.
bs0
0
bs+1
..
.
0
bm
3.4.3 Cramersche Regel
S 134
Das auf Leibniz zurückgehende Verfahren wurde von Cramer wiederentdeckt, erstaunlicher Weise über ein Jahrhundert vor der Einführung
der Matrizentheorie. Da diese Lösungsmethode allein durch Determinanten realisiert wird, ist sie nur für Gleichungssysteme geeignet deren
Anzahl der Gleichungen identisch ist mit der Anzahl der Unbekannten.
Sei A eine n-quadratische Matrix deren Determinante nicht verschwindet. Dann ist mit S 132 die Lösung des linearen Gleichungssystems
Ax = w eindeutig und die i-te Komponente des Lösungsvektors ist der
Quotient der Determinante des n-Tupels (v1 , . . . , vi−1 , w, vi+1 , . . . , vn )
und der Determinante von A.
2
Beweisen lässt sich diese Aussage mit Hilfe der Spaltenmultilinearität
der Determinante. Denn wegen ihr gilt
Repetitorium
83
lineare Algebra
4 Eigenwertproblem
det(v1 , . . . , vi−1 , w, vi+1 , . . . , vn )
P
= det(v1 , . . . , vi−1 , n
j=1 xj vj , vi+1 , . . . , vn )
Pn
=
j=1 xj det(v1 , . . . , vi−1 , vj , vi+1 , . . . , vn )
= xi det(v1 , . . . , vi−1 , vi , vi+1 , . . . , vn )
( Voraussetzung )
( Spaltemultiliniarität S 115.2)
(S 116.1 ⇒ ∀vj6=i : xj det(. . . ) = 0)
Dividiert man nun beide Seiten mit der Determinante von A erhält man
die behauptete Beziehung.
4 Eigenwertproblem für Matrizen
D 98
Bei der Anwendung der linearen Algebra in der Mathematik, Physik,
Technik oder Ökonomie tritt das sogenannte Eigenwertproblem auf,
dass sich wie folgt formulieren lässt.
Zu einer gegebenen n-reihigen quadratischen Matrix A sollen alle Skalare λ ermittelt werden, deren Produkt mit einem n-dimensionalen von
Null verschiedenen Spaltenvektor x identisch ist mit dem Matrizenprodukt von A und x, also Ax = λx mit x 6= 0. Die λ heißen Eigenwerte
von A.
2
Da es im folgenden einfacher sein wird von einem Körper dessen Menge unendlich viele Elemente enthält auszugehen und dieser Umstand in
der Anwendung meist erfüllt ist, soll für diesen Abschnitt K ∈ {Q, R, C}
gelten.
Für die Untersuchung des Eigenwertproblems wird der Begriff des
Polynoms benötigt, der nachstehend so weit wie nötig entwickelt und
untersucht werden soll.
4.1 Polynome
Zunächst wird der Vektorraum auf der Menge aller Abbildungen von
M in K definiert wobei M eine beliebige Menge ist.
D 99.1
Man setzt Abb(M, K) := {f | f : M → K}
Weiter wird für die Abbildungen f, g von M in K und den Skalar a aus
K definiert:
D 99.2
f + g : M → K, (f + g)(x) := f(x) + g(x) heißt die Summe von f und
g.
af : M → K, (af)(x) := af(x) heißt das a-Fache von f.
fg : M → K, (fg)(x) := f(x)g(x) heißt das Produkt von f und g.
D 99.3
D 99.4
D 99.5
D 99.6
D 99.7
Die Abbildung Abb(M, K) × Abb(M, K) → Abb(M, K), (f, g) 7→ f + g
heißt Addition.
Die Abbildung K × Abb(M, K) → Abb(M, K), (a, f) 7→ af heißt skalare
Multiplikation.
Die Abbildung Abb(M, K) × Abb(M, K) → Abb(M, K), (f, g) 7→ fg
Repetitorium
84
lineare Algebra
4 Eigenwertproblem
S 135
D 100
Polynome
heißt Multiplikation.
2
Ist M ein beliebige Menge, dann lässt sich auf der Menge aller Abbildungen von M in K mit den gerade definierten Verknüpfungen Addition
und Multiplikation ein Vektorraum definieren, dessen neutrales Element
der Addition die konstante Nullabbildung ist und dessen Negatives von
f ∈ Abb(M, K) die Abbildung −f ∈ Abb(M, K) ist.
2
An dieser stelle soll vereinbart werden, dass sich jede konstante Abbildung M → K, x 7→ a mit a identifizieren lässt, so dass K eine Teilmenge
der Menge aller Abbildungen von M in K ist. In der Tat kann man zeigen, dass sich bei dieser Interpretation ein Unterraum von Abb(M, K)
auf K definieren lässt.
2
Die unter D 99.7 definierte Multiplikation hat die nachstehenden Eigenschaften.
S 136.1
S 136.2
S 136.3
S 136.4
Sie ist assoziativ, also (fg)h = f(gh)
Sie ist kommutativ, also fg = gf
Sie ist distributiv, also f(g + g 0 ) = fg + fg 0
Sie unitär34 , also f1 = 1f = f
S 136.5
Sie hat keinen Nullteiler und es folgt f0 = 0f = 0
2
Beweisen lässt sich dies, indem man diese Eigenschaften auf die entsprechenden Körpereigenschaften zurückführt.
Die Menge aller Abbildungen von M in K bildet mit der oben definierten Addition und Multiplikation eine Struktur, die alle Merkmale eines Körpers hat, außer der Eigenschaft für jede Abbildung aus
Abb(M, K)\{0} ein multiplikativen Inversen zu haben.
S 137
Enthält M wenigstens zwei Elemente kann man eine Abbildung f angeben mit der Eigenschaft f(x) 6= 0 = f(y), also auch f 6= 0. Soll nun
die Abbildung g das Reziproke von f sein gilt, fg = f(z)g(z) = 1 für
alle z ∈ M. Da aber f(y) = 0 vorausgesetzt wurde gibt es mit S 13.1
wenigstens ein z für das gilt f(z)g(z) = 0, nämlich z = y. Also existiert
für f kein Reziprokes in Abb(M, K) und auf Abb(M, K) lässt sich keine
Körperstruktur definieren.
2
Nun kann der Begriff des Polynoms eingeführt werden.
Eine Abbildung f : K → K heißt Polynom oder eine Polynomfunktion
über K, falls ein m aus N0 und a0 , . . . , am aus K existieren mit
Pm
f(x) = a0 x0 + · · · + am xm = i=0 ai xi
D 101.1
D 101.2
für alle x aus K.
Die Menge aller Polynome wird bezeichnet mit
34
Eine Struktur mit diesen Eigenschaften nennt man kommutativer Ring.
Repetitorium
85
lineare Algebra
4 Eigenwertproblem
Polynome
Pol K = {f ∈ Abb(K, K) | f ist ein Polynom }.
D 101.3
Die konstanten Abbildungen von K in K heißen konstante Polynome
D 101.4
Die Nullabbildung von K in K heißt das Nullpolynom.
Die a0 , . . . , am heißen Koeffizienten von f.
D 101.5
D 101.6
D 101.7
D 101.8
D 101.9
am heißt der höchste Koeffizient oder Leitkoeffizient von f.
a0 heißt der niedrigste Koeffizient oder das konstante Glied von f.
Der Index des von Null verschieden Koeffizienten mit dem größten Index heißt Grad von f und wird formal mit Grad f := m mit am 6= 0
bezeichnet.
Es ist zweckmäßig den Grad des Nullpolynoms auf −∞ zu setzen. Wobei
für alle r aus R die nachstehenden Eigenschaft bezüglich −∞ gesetzt
werden.
−∞ + r := r + −∞ := −∞ =: −∞ + −∞, −∞ < r
Ein Polynom, das den Grad 1, 2, 3, 4 hat heißt lineares, quadratisches,
kubisches, biquadratisches Polynom.
D 101.11 die Polynome 1 = x0 , x1 , x2 , . . . heißen Monome.
2
Folgende strukturelle Eigenschaften der Menge aller Polynome über K
lassen sich beweisen.
D 101.10
S 138.1
S 138.2
S 138.3
S 138.4
Auf der Menge aller Polynome über K lässt sich ein Unterraum des
Vektorraums aller Abbildungen von K in K definieren.
Auf Pol K kann man einen Unterring des kommutativen Ringes auf
Abb(K, K) definieren.
Für alle m aus N0 sind die Monome x0 , · · · , xm aus dem Vektorraum
der Polynome über K linear unabhängig.
Ist das Polynom f nicht das Nullpolynom, so gibt es eindeutig bestimmte Koeffizienten von f mit einem von Null verschiedenen LeitkoPm
effizienten und es gilt f(x) = i=0 ai xi für alle x aus K.
2
S 138.1 lässt sich beweisen indem man die geforderten Eigenschaften
eines Unterraums nachrechnet. S 138.2 indem man zeigt, dass ff 0 aus
Pol K ist für alle f, f 0 ∈ Pol K.
Für S 138.3 soll also gelten, dass die Linearkombination der Polynome
fi : K →, x 7→ xi mit 0 6 i 6 m nur dann verschwindet, wenn alle
Pm
Linearkoeffizienten a0 , . . . , am verschwinden. Das heißt i=0 ai xi = 0
für alle x ∈ K nur dann, wenn a1 = · · · = am = 0. Da dies für alle
x ∈ K gelten muss gilt es insbesondere für m + 1 paarweise verschiedene
P
i
Elemente35 c0 , · · · , cm aus K, so dass auch m
i=0 ai cj = 0 (0 6 j 6 m)
gilt. Damit ist v = t (a0 , · · · , am) ∈ Km+1 eine Lösung des homogenen
35
Diese existieren weil K unendlich viele Elemente enthält
Repetitorium
86
lineare Algebra
4 Eigenwertproblem
Polynome
Pm i
linearen Gleichungssystems G :=
i=0 cj xi = 0 (0 6 j 6 m). Nun
sieht man, dass die Koeffizientenmatrix von G die Vandermond Matrix
Qm−1 Qm
(cij )ji aus S 122 ist mit der Determinante k=0
j=k+1 (cj − ck ). Da
die cj paarweise verschieden sind, ist die Differenz von cj und ck mit
j 6= k stets von Null verschieden und damit auch die Determinante der
Koeffizientenmatrix. In diesem Fall lässt sich S 132(iv), (vi) anwenden
und es folgt, dass die einzige Lösung von G die triviale ist, also a0 =
· · · = am = 0.
Für S 138.4 nimmt man an es gäbe zwei identische Polynome
f : K → K, f(x) :=
Pm
i
0
0
i=0 ai x und f : K → K, f (x) :=
Pn
j=0
bj x j ,
P
Pn
36
i
j
m > n, und bj := 0
also m
i=0 ai x =
j=1 bj x für alle x aus K. Sei
für alle j > n.a, dann erhält man
Pm
i=0
S 139.1
ai x i =
Pm
i=0
bi xi =⇒
Pm
i=0 (ai
− bi )xi = 0.
Da die xi , wie gerade gezeigt linear unabhängig sind gilt ai − bi =
0 ⇒ ai = bi . Da die bi für i > n verschwinden, verschwinden die
entsprechenden ai auch, und somit ist m = n.
Es lassen sich die folgenden Rechenregeln festhalten.
Ein Polynom ist genau dann nicht das Nullpolynom, wenn der Grad
des Polynoms wenigstens Null ist.
S 139.2
Ein Polynom ist genau dann konstant, wenn der Grad des Polynoms
höchstens Null ist.
S 139.3
Ein Polynom ist genau dann konstant und verschwindet nicht, wenn
der Grad exakt Null ist.
Der Grad der Summe zweier Polynome ist höchstens der Grad des Polynoms mit dem größeren Grad.
Ist der Grad zweier Polynome verschieden, dann ist der Grad der Summe dieser beiden Polynome identisch mit dem Grad des Polynoms, das
den größeren Grad hat.
S 139.4
S 139.5
S 139.6
Der Grad des Produkts zweier Polynome ist identisch mit der Summe
des Grades des einen Polynoms und des Grades des anderen.
S 139.7
Das Produkt eines beliebigen Polynom und dem Nullpolynom ergibt
stets das Nullpolynom.
Die Menge aller Polynome über K ist nullteilerfrei. Denn sind zwei Polynome von Null verschieden hat ihr Produkt wenigstens den Grad Null
ist also in keinem Fall das Nullpolynom.
2
S 139.8
36
Der Beweis für n > m verläuft analog
Repetitorium
87
lineare Algebra
4 Eigenwertproblem
Polynome
4.1.1 Nullstellen und Teilbarkeit
D 102
Untersucht man das Eigenwertproblem gelangt man zu der Fragestellung „welche Lösungen hat die Gleichung f(λ) = 0?” wobei f hier ein
Polynom darstellt.
Ist f ein Polynom und λ ein Element aus K, das die Gleichung f(λ) = 0
erfüllt. Dann heißt λ Nullstelle von f.
2
Der Teilbarkeitsbegriff spielt eine Zentrale Rolle beim Lösen von Polynomgleichungen und diesbezüglich besteht eine enge Beziehung zwischen der Menge der Polynome über K und der Menge der ganzen Zahlen.
D 103
S 140.1
S 140.2
S 140.3
S 140.4
S 140.5
S 140.6
S 140.7
S 140.8
S 140.9
S 140.10
S 141
Ein Polynom f ist (k)ein Teiler37 eines Polynoms g – formal f | g (f g) – wenn (k)ein Polynom f 0 existiert mit g = ff 0 .
2
Die grundlegenden Eigenschaften der Teilbarkeitsrelation für Polynomen f, g, h ∈ Pol K.
Die Teilbarkeitsrelation ist reflexiv.
Die Teilbarkeitsrelation ist transitiv.
Ist f Teiler von sowohl g als auch h, dann ist es auch Teiler der Summe
von g und h.
Ist f Teiler von g, dann ist es auch Teiler des Produkts von g und h.
Jedes Polynom teilt das Nullpolynom.
Das Einspolynom teilt jedes Polynom.
Das Nullpolynom teilt f genau dann, wenn f das Nullpolynom ist.
f teilt das Einspolynom genau dann, wenn f konstant und nicht das
Nullpolynom ist.
Wenn f Teiler von g ist, und g vom Nullpolynom verschieden ist, dann
ist der Grad von f höchstens der Grad von g.
ist f ein Teiler von g und λ eine Nullstelle von f, dann ist λ auch es
auch eine Nullstelle von g.
2
Analog zu den Ganzen Zahlen wird nun die Division mit Rest entwickelt.
Zu zwei Polynomen f, g 6= 0 gibt es eindeutig bestimmte Polynome q, r
mit f = qg + r und Grad r < Grad g.
2
Ist der Grad von f kleiner als der von g, dann hat man mit q := 0
und r := f die beiden geforderten Polynome schon gefunden. Also
bleibt noch der Fall Grad f =: m > n := Grad g zu Untersuchen. Dies
geschieht per vollständiger Induktion nach m. Ist m Null, dann verschwindet auch n und f sowie g sind mit S 139.3 konstant und vom
37
man sagt auch f teilt g, f geht in g auf oder g ist ein Vielfaches von f.
Repetitorium
88
lineare Algebra
4 Eigenwertproblem
Polynome
Nullpolynom verschieden, also hat man mit q := gf und r := 0 die
gewünschten Polynome gefunden und den Induktionsanfang bewiesen.
Der Induktionsschritt wird von m − 1 nach m geführt. Definiert man
den Leitkoeffizienten von f als a und den von g als b, dann kann man
schreiben f = axm + f1 und g = bxn + g1 . Da voraussetzungsgemäß
gesichert ist, dass weder die Leitkoeffizienten verschwinden noch n > m
gilt, ist das Polynom q 0 := ab xm−n sicher vom Nullpolynom verschieden
sowie es einen kleineren Grad als m hat, und es gilt
q 0 g = ab xm−n (bxn + g1 ) = axm + h mit h = q 0 g1
S 142
S 143
Also ist mit S 139.6 der Grad von h kleiner m. f − q 0 g ist identisch mit
f1 − h und mit S 139.4 ist der Grad von f − q 0 g auch kleiner als m, so
dass mit der Induktionsannahme die Existenz derjenigen Polynome q
und r gefolgert werden kann, für die gilt f − q 0 g = qg + r. Löst man
diesen Ausdruck nach f auf folgt f = (q + q 0 )g + r, was zu beweisen
war. Die Eindeutigkeit wird wie üblich durch die Annahme es gäbe
zwei Paare von Polynomen die verschieden sind aber diesbezüglich die
gleichen Eigenschaften haben, also f = q1 g + r1 = q2 g + r2 . Dies hat
aber zur Folge (q1 − q2 )g = r2 − r1 und mit S 139.4, S 139.6, 139.1
folgt, dass der Grad von (q1 − q2 )g wenigstens n ist, während der von
r2 − r1 voraussetzungsgemäß kleiner als n ist. Es ergibt sich also ein
Widerspruch und somit gilt q1 = q2 was unmittelbar r1 = r2 zur Folge
hat.
Nachdem nun konstruktiv die Existenz der Polynome q und r bewiesen
wurden, kann man ein wichtiges Äquivalenzkriterium für Nullstellen
angeben. Nimmt man an, dass x−λ ein Teiler eines Polynoms f ist, dass
also gilt f = (x − λ)f1 . Dann ist f(λ) offensichtlich Null. Nimmt man
andererseits an, λ sei eine Nullstelle des Polynoms f und das Polynom
g des vorstehenden Satzes sei x − λ 6= 0, dann erhält man die Polynome
q, r mit f = qg + r und Grad r < Grad g. Dies impliziert, dass der
Grad von r höchstens Null ist und damit ist r konstant. Und da λ als
Nullstelle vorausgesetzt ist, gilt 0 = f(λ) = (λ − λ)q(λ) + r(λ) = r(λ).
Das Polynom r verschwindet also und setzt man f1 := q, dann hat man
f = (x − λ)f1
Ein Polynom f hat genau dann an der Stelle λ ∈ K eine Nullstelle wenn
das Polynom x − λ ein Teiler von f ist.
2
0
Jetzt kann mit vollständiger Induktion über den Grad m ∈ N eines
vom Nullpolynom verschiedenen Polynoms – wobei man geschickterweise von m − 1 nach m schließt – zeigen, dass
das Polynom höchstens endlich viele Nullstellen in K hat und deren
Anzahl höchstens der Grad von f ist.
2
Repetitorium
89
lineare Algebra
4 Eigenwertproblem
Eigenwerte
Mit x2 + 1 existiert ein Polynom, dass in R keine Nullstellen hat, wohl
aber in C. Um hier verschieden Körper differenzierter betrachten zu
können, führt man den Begriff der algebraischen Abgeschlossenheit ein.
D 104
S 144
Ein Körper heißt algebraisch abgeschlossen, falls jedes nichtkonstante
Polynom aus Pol K eine Nullstelle in K besitzt.
2
Dies führt zum Fundamentalsatz der Algebra, der hier ohne weiteren
Beweis angegeben wird.
Der Körper C der komplexen Zahlen ist algebraisch abgeschlossen. 2
Das heißt also, dass man die oben gesicherte Zerlegung f = (x − λ)f1 so
lange mit f1 wiederholen kann, bis f1 ein konstantes Polynom ist, falls
K ein abgeschlossener Körper und f nicht konstant ist.
S 145
Man sagt f zerfällt in Linearfaktoren, es existiert also eine Zerlegung
f = c(x − λ1 )m1 · · · · · (x − λr )mr . Wobei c aus K ist und nicht verschwindet, r, m1 , . . . , mr sind aus N und die λ sind aus K und paarweise
verschieden. Dabei ist c der Leitkoeffizient und die λ1 , . . . , λr sind die
verschiedenen Nullstellen von f in K und r ist deren Anzahl, schließlich
sind die Paare (λ1 , m1 ), · · · , (λr , mr ) durch f bis auf ihre Reihenfolge
eindeutig bestimmt.
2
D 105
Die m1 , . . . , mr werden formal mit mult(f, λj ) := mj mit 1 6 j 6 r
bezeichnet und heißen Vielfachheit oder Multiplizität der Nullstelle
λj von f. Nullstellen der Vielfachheit 1 heißen einfach.
2
S 146.1
S 146.2
S 146.3
Für die Nullstellen eines Polynoms gelten nachstehende Sätze.
Ist K algebraisch abgeschlossen und f ein Polynom über K, dass vom
Nullpolynom verschieden ist, dann ist die Anzahl der Nullstellen mit
ihrer Vielfachheit gezählt identisch mit dem Grad von f.
Eine komplexe Zahl ist genau dann eine Nullstelle von f, wenn auch die
Konjugierte dieser Zahl eine Nullstelle von f ist
Ist f nicht konstant gibt es eine Zerlegung
Q
Qs+t
2
mj
.
f = c sj=1 (x − λj )m
j
j=s+1 (x − aj x + bj )
Mit c ∈ R, c 6= 0, s, t ∈ N0 , m1 , . . . , ms+t ∈ N, paarweise verschiedenen
a2
λ1 , . . . , λs ∈ R, (as+1 , bs+1 ), . . . , (as+t , bs+t )R2 und 4j < bj für s + 1 6
j 6 s + t.
S 146.4
Ist f ein normiertes Polynom mit ganzen Koeffizienten und einem Grad
von wenigstens eins, dann ist λ ∈ Q eine Nullstelle von f, wenn λ eine
ganze Zahl ist die a0 teilt.
2
Nach dem der Polynombegriff geklärt ist, kann mit dem Eigenwertproblem fortgefahren werden.
Repetitorium
90
lineare Algebra
4 Eigenwertproblem
Eigenwerte
4.2 Eigenwerte
D 106.1
D 106.2
D 106.3
S 147
D 107
Die Menge aller n-dimensionaler Spaltenvektoren, die die Gleichung
Av = λv mit A ∈ Matn (K), λ ∈ K erfüllen, sind ein Untervektorraum
des n-dimensionalen Spaltenraums, da sie die Lösungsmenge des homogenen linearen Gleichungssystems GAλ := (λ1n − A)x = 0 sind.
Man definiert den Skalar λ als Eigenwert von A, falls ein n-dimensionaler
Spaltenvektor v existiert, der von Null verschieden ist und die Gleichung
Av = λv erfüllt.
Weiter definiert man die Menge aller Vektoren die diese Gleiching erfüllen als Eigenraum von A zum Eigenwert λ und schreibt formal
EigA (λ) := {v ∈ Kn | Av = λv}.
Die vom Nullvektor verschiedenen Elemente aus Eig A (λ) heißen Eigenvektoren von A zum Eigenwert λ. Ein von Null verschiedener Vektor
v ∈ Kn heißt Eignevektor von A falls ein Eigenwert von A existiert mit
v ∈ EigA (λ).
2
Für die Nullmatrix gilt Beispielsweise Eig 0 (0) = Kn . Für die Einheits v
=
matrix Eig1n (1) = Kn und für die Blockmatrix 10r 00 gilt 10r 00 w
v
v
r
n−1
0
}, EigA (1) = { 0 | v ∈ K }.
0 und somit EigA (0) = { w | w ∈ K
Ein Äquivalenzsatz für Eigenwerte.
(i)
⇐⇒ λ aus K ist ein Eigenwert der n-reihigen quadratischen Matrix A.
(ii)
⇐⇒ Der Eigenraum von A zum Eigenwert λ ist nicht der Nullraum.
(iii)
⇐⇒ Das homogene lineare Gleichungssystem GA,λ hat nicht nur die
triviale Lösung.
(iv)
⇐⇒ Die Determinante der Koeffizientenmatrix von GA,λ verschwindet.
2
Die letzte Äquivalenzaussage liefert eine Gleichung det(x1n − A) = 0
deren Lösungen die Eigenwerte einer Matrix A ist.
det(x1n − A) heißt charakteristische Gleichung von A.
2
Man könnte die charakteristische Gleichung von A auch als Abbildungsvorschrift einer Abbildung von K in K interpretieren. Bedient man sich
der Leibnizdarstellung und interpretiert man eine Komponente der Matrix (x1n − A) = (xδij − aij )ij als (xδij − aij ) dann gilt
det(x1n − A) =
n!
P
πk=1 ∈Sn
(πk )(xδπk (1),1 − aπk (1),1 ) · · · · · (xδπk (n),n − aπk (n),n ).
Also ist jeder Faktor eines jeden Summanden ein Polynom und da sowohl das Produkt als auch die Summe zweier Polynome wieder ein
Polynom ergibt, ist det(x1n − A) ein Polynom dessen Nullstellen die
Eigenwerte von A sind. Geht man zur Spaltendarstellung der Matrix
(x1n − A) über und betrachtet den Fall38 A ∈ Mat3 (K), dann lassen
38
Auch hier soll die Spezialisierung der Übersicht dienen der allgemeine Fall folgt
Repetitorium
91
lineare Algebra
4 Eigenwertproblem
Eigenwerte
sich aus det(xe1 − v1 , xe2 − v2 , xe3 − v3 ) mit der Spaltenmultiliniarität
die Subtrahenden „herausziehen.”
det(xe1 − v1 , xe2 − v2 , xe3 − v3 )
= det(xe1 , xe2 − v2 , xe3 − v3 ) + det(−v1 , xe2 − v2 , xe3 − v3 )
= det(xe1 , xe2 , xe3 − v3 ) + det(−v1 , xe2 − v2 , xe3 − v3 )
+ det(xe1 , −v2 , xe3 − v3 )
= det(xe1 , xe2 , xe3 ) + det(−v1 , xe2 − v2 , xe3 − v3 ) + det(xe1 , −v2 , xe3 − v3 )
+ det(xe1 , xe2 , −v3 )
Also lässt sich der erste Summand s1 als x3 det(e1 , e2 , e3) oder allgemein
als xn det(e1 , . . . , en ) schreiben.
In den übrigen Summanden sind noch zwei bzw (n − 1) Spalten von
x abhängig. Um auch hier x herauszuziehen, entfernt man wieder die
Subtrahenden und erhält
s1 + det(−v1 , xe2 , xe3 ) + det(xe1 , −v2 , xe3 ) + det(xe1 , xe2 , −v3 ) +
det(−v1 , −v2 , xe3 − v3 ) + det(−v1 , xe2 , −v3 ) + det(xe1 , −v2 , −v3 ),
so dass man die Determinanten in denen zwei Spalten von x abhängen
P
zusammenfassen kann zu s2 := x2 3i=1 (e1 , . . . , ei−1 , vi , ei+1 , . . . , e3 )
P
n
oder allgemein zu xn−1 i=1 (e1 , . . . , ei−1 , vi , ei+1 , . . . , en ). Dann könnte man die Summanden Bilden, in denen nur noch eine Spalte von x
abhängen, also
s1 + s2 + det(xe1 , −v2 , −v3 ) + det(−v1 , xe2 , −v3 ) + det(−v1 , −v2 , xe3 ) +
det(−v1 , −v2 , −v3 ).
Man sieht, dass das konstante Glied des Polynoms (x13 − A) die Determinante von (−v1 , −v2 , −v3 ) oder allgemein die Determinante von
(−v1 , . . . , −vn ) ist. Mit der Spurdefinition D 69.11 und der Identität
det(−v1 , . . . , −vn ) = (−1)n det A kann zusammenfassend festgehalten
werden:
S 148
Die Funktion
χA : K −→ K,
x 7−→ χA (x) := det(x1n − A)
ist ein normiertes Polynom vom Grad n mit
det(x1n − A) = xn − (spur A)xm−1 + · · · + (−1)n det A.
D 108
S 149.1
S 149.2
2
Die Funktion χA heißt charakteristisches Polynom von A.
2
Nun kann eine Beziehung zwischen einem Eigenwert λ ∈ K von A ∈
Matn (K) und einem Polynom hergestellt werden.
Denn λ ist genau dann eigenwert von A, wenn es Nullstelle des charakteristischen Polynoms ist.
Außerdem folgt mit S 143 unmittelbar, dass A höchstens n Eigenwerte
analog
Repetitorium
92
lineare Algebra
4 Eigenwertproblem
Diagonalisierbarkeit
hat; ist K algebraisch abgeschlossen hat A mit S 146.1 genau n Eigenwerte mit ihrer Vielfachheit gezählt.
2
Eine weitere Beziehung zwischen Polynomen und Matrizen erhält man
indem man den Ausdruck f(A) definiert, wobei f ein Polynom über K
und A eine n-reihige quadratische Matrix ist.
D 109.1
Ist r aus N0 , dann heißt Ar mit
A0 := 1n ,
Ar := A
· · · A} für r > 0
| · ·{z
r−mal
D 109.2
S 150
die r-te Potenz von A
Pm
i
Für ein Polynom f über K heißt f(A) =
i=0 ai A ∈ Matn (K) der
Wert von f in A oder der Wert von f an der Stelle A oder die
Einsetzung von A in f.
2
39
Es gelten die zur „Körper-Potenz” analogen Rechenregeln
1rn = 1n ,
Ar+s = Ar As ,
Ars = (Ar )s
und Ar = AAr−1 .
2
Nun lässt sich der Satz von Hamilton und Cayley zeigen, er besagt,
dass der Wert an der Stelle A des charakteristischen Polynoms von A
mit der Nullmatrix identisch ist. Der Beweis
χA (A) = det(A1n − A) = det(A − A) = det 0 = 0
ist falsch, da χA (A) ∈ Matn (K) währen det(. . . ) ∈ K . . .
Auf den tatsächlichen Beweis wird verzichtet. Es findet sich ein Beweis
zu diesem Satz im achten Kapitel von [Koe03].
4.3 Diagonalisierbarkeit
Eine n-reihige quadratische Matrix A heißt genau dann diagonalisierbar oder ist auf Diagonalgestalt transformierbar, falls eine Matrix
aus der allgemeinen linearen Gruppe n-ten Grades existiert, so dass die
Matrix P −1 AP diagonalgestalt hat.
Unter dem Diagonalisierungsproblem versteht man die Fragestellung,
welche n × n-Matrizen diagonalisierbar sind. Zunächst lässt sich ausrechnen
χP−1 AP (x) = det(x1n − P−1 AP)
= det(xP−1 P1n − P−1 AP) = det(xP−1 1n P − P−1 AP)
= det(P−1 (x1n − A)P)
= (det P−1 ) det(x1n − A)(det P)
= det(x1n − A)(det(P−1 P)) = det(x1n − A) det(1n )
= χA (x)
Negative Exponenten sind allerdings ausgeschlossen und i.d.R. ist (AB)r 6=
(A B ).
39
r r
Repetitorium
93
lineare Algebra
4 Eigenwertproblem
S 151
Diagonalisierbarkeit
Ist P −1 AP eine Diagonalmatrix, dann ist sie insbesondere auch eine
obere Dreiecksmatrix und (x1n −P −1 AP) ist dann auch eine obere Dreiecksmatrix mit den Diagonalkomponenten x − λi und mit S 117.1 gilt
Qn
det(x1n − P −1 AP) = i=1 x − λi , also verschwindet χP−1 AP (x) genau
dann wenn x = λ1 , . . . , λn . Damit sind dann wegen χP−1 AP = χA die
Diagonalkomponenten von P −1 AP die Eigenwerte von A.
Ist P ∈ GLn (K), A ∈ Matn (K), dann haben P −1 AP und A das gleiche
charakteristische Polynom und ist P −1 AP eine Diagonalmatrix, dann
sind die Diagonalelemente die Eigenwerte von A.
2
Mit Hilfe des nachstehenden Äquivalenzsatzes kann eine Beziehung zwischen Eigenwerten und Eigenvektoren hergestellt werden. Vorausgesetzt A ist aus Matn (K), B = (v1 , . . . , vn ) ist eine geordnete Basis des
Kn und P := (v1 , . . . , vn ) ist die Matrix, die sich aus diesen Vektoren
zusammensetzt. Da B eine geordnete Basis ist, ist P invertierbar. Sei
P −1 AP = (v10 , . . . , vn0 ) =: A 0 , dann folgt mit S 85.1
AP = (Av1 , . . . , Avn ) = (Pv10 , . . . , Pvn0 ) = PA 0
also Avi = Pvi0 . Angenommen P −1 AP ist eine Diagonalmatrix, dann ist
vi0 = λi ei und damit gilt Pvk0 = λi Pei . Da (Pe1 , . . . , Pen ) die Realisierung von P als n-Tupel seiner Spaltenvektoren ist, folgt
Pvi = λi Pei = λi vi = Avi .
S 152.1
S 152.2
S 153
Also ist P AP genau dann eine Diagonalmatrix mit den Diagonalkomponenten λ1 , . . . , λn ∈ K, wenn vj Eigenvektor von A zum Eigenwert λj
ist.
Oder anders ausgedrückt, eine Matrix vom Typ (n, n) ist genau dann
diagonalisierbar, wenn eine geordnete Basis des Kn existiert, deren
Spaltenvektoren allesamt Eigenvektoren von A sind.
2
Mit dieser Erkenntnis kann eine erste Antwort auf das Diagonalisierungsproblem gegeben werden. Eine von Null verschiedene obere Dreiecksmatrix A deren Diagonalkomponenten verschwinden, ist nicht diagonalisierbar. Denn der einzige Eigenwert von A ist die Null, gibt es
weiter ein P ∈ GLn (K), so dass P −1 AP eine Diagonalmatrix ist dann
müssten wegen S 151 alle Diagonalkomponenten verschwinden. Die restlichen Komponenten von P −1 AP sind sowieso Null, also P −1 AP = 0.
Da die Nullmatrix nicht in der Menge der allgemeinen linearen Gruppe
n-ten Grades enthalten ist folgt dass A verschwinden muss im Widerspruch zu der Voraussetzung, dass A von der Nullmatrix verschieden
ist.
Es sind also nicht alle n-reihigen quadratischen Matrizen diagonalisierbar.
2
−1
Repetitorium
94
lineare Algebra
4 Eigenwertproblem
Diagonalisierbarkeit
Ein einfaches Beispielmatrix, die nicht reell diagonalisierbar ist, ist
2
A := 10 −1
0 . Denn χA (x) = x + 1 hat keine reellen Eigenwerte, allerdings hat es die (rein) komplexen Eigenwerte ±i. Mit Av = λ1/2 v = ±iv
folgt, dass die Komponente z2 eines Eigenvektors zz12 mit ∓iz1 iden
1
tisch ist, damit ist −i
Eigenvektor zum Eigenwert i und 1i Eigen
1 1
1 1
6= 0 impliziert, dass P := −i
vektor zum Eigenwert −i. det −i
i
i
0
ist A diagonalisierbar.
invertierbar ist und mit P −1 AP = 0i −i
Möchte man nun von einer n-reihigen quadratischen Matrix A konkret entscheiden ob sie diagonalisierbar ist, kann man wie folgt vorgehen.
Zunächst ermittelt man das charakteristische Polynom
χA : K −→ K,
χA (x) := det(x1n − A).
von A. Zerfällt es nicht in linearfaktoren, ist A nicht diagonalisierbar.
Zerfällt es in Linearfaktoren, dann berechne man die Nullstellen
χA (x) = det(x1n − A) = 0
von χA (x) und somit die Eigenwerte von A.
Dann ermittle man die Eigenräume zu den jeweiligen Eigenwerten indem man die Lösungsräume der homogenen linearen Gleichungssysteme
(λj 1n − A)x = 0
bestimmt.
Anschließend ermittelt man zu den Eigenräumen geordnete Basen Bj =
(v1j , . . . , vmj ) mit mj = dim Eig(λj ) = mult(χA , λj ), sprich die Dimension eines Eigenraums bzw. die Anzahl der Basiselemente muss identisch
sein mit der Vielfachheit der Nullstelle λj des charakteristischen Polynoms von A.
Ist dies der Fall fügen sich die geordneten Basen Bj zu der Matrix
P = (B1 , . . . , Br ) = (v11 , . . . , vm1 , . . . , v1r , . . . , vmr )
des Typs (n, n). Man kann zeigen, dass diese Matrix diagonalisierbar
ist, folglich bilden ihre Spalten eine Basis des Kn und da sie auch Eigenvektoren von A sind gilt P −1 AP ist eine Diagonalmatrix, also A ist
diagonalisierbar.
Repetitorium
95
lineare Algebra
LITERATUR
LITERATUR
Literatur
[Ama98] Amann, Herber: Analysis I. Birkhäuser, 1998. – Erster Band
einer dreibändigen Einführung in die Analysis, die über das
Grundstudium hinausgeht und in der die Begriffe auf hohem
Abstraktionsniveau entwickelt werden.
[Dei04]
Deiser, Oliver: Einführung in die Mengenlehre. 2. Auflage. Springer, 2004. – Eine wirklich schöne Einführung in die
Mengenlehre.
[Jän03] Jänich, Klaus: Lineare Algebra. 10. Auflage. Springer, 2003.
– Das Buch zum einsteigen in die lineare Algebra.
[Knu04] Knuth, Donald E.: Concrete Mathematics (A fondation
for computer sience). 2. Auflage, 16. korr. Nachdruck. Addison Wesley, 2004. – Dieses Buch wurde wegen seines Layouts
in die Literaturliste aufgenommen, nicht wegen seines Inhalts.
Mir gefiel die Darstellung so gut, dass ich es dem Meister Don
Knuth nachtun wollte und mein TEX-System entsprechend
einrichtete. Zum Inhalt kann ich bisher sagen, dass es sich um
einen anspruchsvollen Rundumschlag handelt, was die mathematischen Bedürfnisse eines Informatikers bzw. einer Informatikerin anbelangt. Es ist eine gute Lektüre um sich im Lesen
(und Verfassen) englischsprachiger mathematischer Texte zu
üben.
[Koe03] Koecher, Max: Lineare Algebra und analytische Geometrie. 4. Auflage, 1. korr. Nachdruck. Springer, 2003. – Niveauvolles Buch über die lin. Algebra mit vielen historischen
Hintergründen und einem Kapitel, dass zeigt wie sich aus der
lin. Algebra die euklidische Geometrie ableiten lässt.
[Lex00] Lexikonredaktion, Meyers (Hrsg.): DUDEN Rechnen und
Mathematik. 6. Auflage. Bibliographisches Institut & F.A.
Brockhaus AG, 2000
Repetitorium
96
lineare Algebra
Index
a-Fache - Abbildungen, 84
Abb(M, K), 84
Abbildung, 6
abelsche Gruppe, 18
Addition - Abbildungen, 84
Addition – lineare Abbildung, 42
Addition – Matrizen, 49
additives Inverse – Vektorraum,
24
adjungierte Matrix, 73
Adjunkte, 73
algebraische Abgeschlossenheit, 90
algebraisches Komplement, 72
Allgemeine lineare GruppeGLn (K),
56
Assoziativgesetz – Abbildungen,
7
Assoziativgesetz – Mengen, 4
Austauschsatz, 35
B-duale Basis, 67
Basis, 34
Beschränkung einer Abbildung,
7
Betrag einer komplexen Zahl, 14
bijektiv, 7
bijektiv, Komposition, 7
Bild f, 6
Bild – lineare Abbildung, 43
Bild – Matrix, 61
Bild von x unter f, 6
Blockmatrix, 48
Charakteristik eines Körpers, 17–
18
charakteristische Gleichung, 91
de Morgan – allgemein, 5
de Morgan – Mengen, 5
Definitionsmenge, 6
Determinante, 70
Determinantenfunktion, 69
Diagonalmatrix, 47
Differenz – Körper, 19
Differenz – Mengen, 4
Dimension – Vektorraum, 38
direkte Summe – Unterräume, 30
Distributivgesetz – allgemein, 5
Distributivgesetz – Mengen, 5
doppelte Differenz, 5
Dreiecksmatrix, 48
Dualraum, 66
Eigenraum, 91
Eigenvektor, 91
Eigenwert, 91
Einfachheit einer Nullstelle, 90
Einheitsbasis, 35
Einheitsmatrix, 48
Einheitsvektor, 32
Eins – Neutrale der Körpermultiplikation, 17
elementare Spaltenumformungen,
51
elementare Zeilenumformungen,
51
Elementarmatrizen, 48
endlich erzeugt, 32
endlich-dimensionaler Vektorraum,
38
endliche Menge, 12
Endomorphismus, 42
Ergebnisvektor eines LGS, 77
erweiterte Matrix eines LGS, 78
Erzeugendensystem, 32
Extensionalitätsprinzip, 3–4
Fakultät, 13
Familie, 5
97
INDEX
INDEX
Fundamentalsatz der Algebra, 90
Funktionswert, 6
kanonische Basis, 35
Kardinalität, 12
Kardinalzahl, 12
kartesisches Produkt, 4
Kern – lineare Abbildung, 43
Kern – Matrix, 61
Koeffizienten eines LGS, 77
Koeffizientenmatrix eines LGS,
78
Kofaktor, 72
kommutative Gruppe, 18
Kommutativgesetz, Mengen, 4
Komplement, 4
komplementärer Unterraum, 30
Komplementärmatrix, 72–73
komplexe Zahlen, 13
Komponente – Matrix, 46
Komposition, 7
konjugiert komplexe Zahl, 15
Kronecker-δ, 48
General Linear Group, 56
geordnete Basis, 61
geordnete Standardbasis, 61–62
gespiegelte Matrix, 47
Gruppe, 18
Hauptdiagonale, 47
HomK (V, W), 42
homogene lineare Gleichung, 76
homogenes lineares Gleichungssystem, 77
Homogenisierung eines LGS, 77
Homogenität eines LGS, 77
Homomorphismus – Vektorraum,
41
Hyperebene, 66
Identität – Abbildung, 6
Identität – Matrizen, 46
Identität – Mengen, 3
Identität – Tupel, 4
imaginäre Einheit, 13
Imaginärteil, 14
Inhomogenität eines LGS, 77
injektiv, 7
injektiv, Komposition, 7
Inverse, 56
inverse Matrix, 56
invertierbare Matrix, 56
Isomorphismus, 42
iterierte elementare Spaltenumformungen, 51
iterierte Spaltenvertauschung, 52
Lösbarkeit eines LGS, 77
Lösungsmenge eines LGS, 77
Lösungsvektor eines LGS, 77
linear abhängig, 33
linear abhängig – Mengen, 34
linear unabhängig – Mengen, 34
lineare Abbildung, 41
lineare Gleichung, 76
lineare Hülle, 31
lineare Operatoren, 41
lineare Transformation, 41
lineare Unabhängigkeit, 33
lineares Gleichungssystem, 76
Linearform, 66
Linearkoeffizienten, 28
Linearkombination, 28
Jägerzaunregel, 71
Kn , 26
Körper Definition, 16–17
Kürzungsregel, 18
Repetitorium
Matm,n (K), 46–47
Matrix, 46
98
lineare Algebra
INDEX
INDEX
Matrix eines Homomorphismus,
62–63
Matrixform eines LGS, 78
Matrixrang, 50
Matrizeneinheit, 48
Matrizenidentität, 46
Matrizenmultiplikation, 54–55
Matrizenprodukt, 54
Menge der linearen Abbildungen,
42
Mengenfolge, 5
Minuend – Körper, 19
Multiplikation - Abbildungen, 84
Potenz – Körper, 22–23
Potenz – Matrix, 93
Produkt - Abbildungen, 84
Produktzeichen, 22
Π, 22
Produktzeichen – Rekursiv, 22
quadratische Matrix, 47
Quotient – Körper, 19
Nn , 10
n, 13
n-dimensionale Spaltenvektoren,
27
n-dimensionale Spaltenvektorraum,
27
n-Fache – Körper, 21
n-Fache – Matrix, 48
n-Fache – Vektoren, 25
Natürlichen Zahlen, 9
Nebendiagonale, 47
Negative – Körperaddition, 17
Nenner, 19
nichtsinguläre Matrix, 56
Normalformensatz, 58
Null – Neutrale der Körperaddition, 17
Nullmatrix, 48
Nullraum, 28
Nullspalte, 27
Nullstelle, 88
Nullvektor, 24
Operation, 6
Paar, 3
Permutation, 9
Polarkoordinaten, 14
Repetitorium
99
Rang – lineare Abbildung, 45–46
Rang – Matrix, 50
Rang – Menge, 40
Realteil, 14
Realteil einer kompl. Zahl, 14
reguläre Matrix, 56
rekursive Definition, 10
Reziproke – Körpermultiplikation, 17
S(M), 9
Sn , 12
Schnittmenge, 4
skalare Multiplikation - Abbildungen, 84
skalare Multiplikation – lineare
Abbildung, 42
skalare Multiplikation – Matrix,
49
Skalarmultiplikation Kn , 26
Spaltenindex, 46
Spaltenrang, 49
Spaltenvektor – Matrix, 47
Spaltenvektoren eines LGS, 77
span, 31
Spur – Matrix, 47
Standardbasis, 35
Subtrahend – Körper, 19
Summationsbuchstabe, 20
Summationsgrenze, 20
Summationsindex, 20
Summe - Abbildungen, 84
lineare Algebra
INDEX
INDEX
Summe – Matrizen, 48
Summe – Unterräume, 29
Summenzeichen, 20
Σ, 20
Summenzeichen – rekursiv, 20
surjektiv, 7
surjektiv, Komposition, 7
Zeilenindex, 46
Zeilenrang, 49–50
Zeilenraum, 47
Zeilenvektor – Matrix, 47
Zuordnungsvorschrift, 6
Teilbarkeit – Polynome, 88
Teilmengenrelation, 4
Teilvektorraum, 27
Transponierte, 47
transponierte Matrix, 47
triviale Lösung eines hLGS, 78
triviale Linearkombination, 28
trivialen Unterräume, 28
Tupel, 3
Übergangsmatrix, 65–66
Übersetzungsisomorphismus, 65
Umkehrabbildung, 8
unendlich-dimensionaler Vektorraum, 38
unendliche Menge, 12
unitär, Abbildungen, 7
universelle Lösbarkeit eines LGS,
77
Unterdeterminante, 73
Untervektorraum, 27
Urbild, 6
Vektoraddition – Kn , 26
Vektorform eines LGS, 77
Vektorraum V über K, 23–24
Vektorraumhomomorphismus, 41
Vereinigung, 4
Vielfachheit einer Nullstelle, 90
Wert einer Abbildung, 6
Wertemenge, 6
Zähler, 19
Repetitorium
100
lineare Algebra