doc
Werbung

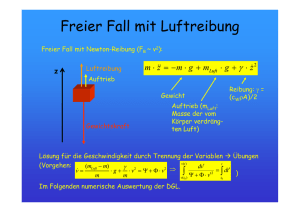
formeln-physik-tm3-v6.doc 17.3.2010 Ergänzende Formeln aus der Physik-Vorlesung 2 Mechanik 2.1 Kinematik der Linienbewegung Geschwindigkeit, Beschleunigung 2.2 Kinematik der Drehbewegung 2.3 Dynamik der geradlinigen Bewegung Newtonsche Axiome, schiefe Ebene, Reibung, Stöße 2.4 Dynamik der Drehbewegung Massenträgheitsmoment, Corioliskraft, Präzession 2.5 Arbeit, Energie, Leistung 2.7 Mechanik der Flüssigkeiten und Gase 3 Schwingungen 3.1 Begriffe 3.2 ungedämpfte elastische Sinusschwingung Federschwingung, Flüssigkeitsschwingung Drehschwingung, Pendel, elektrischer Schwingkreis 3.3 Viskos gedämpfte Schwingung 3.4 Erzwungene Schwingung 2. Mechanik: 2.1 Kinematik der Linienbewegung: Definitionen der Begriffe: Geschwindigkeit: momentane: mittlere: Beschleunigung: momentane: mittlere: Fallbeschleunigung auf Erdoberfläche (Normwert) 2.2 s ds s t 0 t dt s v t v dv a lim v s t 0 t dt v a t g n 9,80665 m2 v lim s Kinematik der Drehbewegung: Anzahl der Umdrehungen: N N t 1 T n n Drehzahl: Zeit für eine Umdrehung: Bogenmaß: (Radiant) 1 rad ˆ 360 57,3 2 Winkelgeschwindigkeit: momentane: lim d t dt mittlere: Bahngrößen: zurückgelegte Wegstrecke: t 0 2 2 n T s r 2 r 2 r n r T r Tangentialgeschwindigkeit (Bahngeschwindigkeit): v tan Tangentialbeschleunigung Radialbeschleunigung: Bahnbeschleunigung (momentane): Winkelbeschleunigung (momentane): gleichförmige Kreisbewegung: ( = konstant) gleichmäßig beschleunigte Kreisbewegung: ( = konst.), allgemein: Spezialfall: aus dem Stand (0=0, 0=0): a tan ar 2 v tan 2 r r v dv v t 0 t dt v lim t 0 t r 0 t at lim 0 t 0 0 t 12 t 2 4 N t2 Betrag der Tangentialbeschleunigung: at v vx v a x y a y z az v v v Betrag der Normalbeschleunigung: an a 2 at2 2.3 Dynamik (Kinetik) der Bewegung: Erstes Newtonsches Axiom: ohne äußere Beeinflussung (Kräfte) gilt: Zweites Newtonsches Axiom: (dynamisches Grundgesetz) hieraus folgt für den Fall konstanter Masse (m = const): Drittes Newtonsches Axiom: (actio = reactio) Schwerpunkt (Massenmittelpunkt): Der Schwerpunkt eines Systems von Massen ist derjenige Punkt, der sich so bewegt als sei die Gesamtmasse in ihm konzentriert und als griffen äußere Kräfte in ihm an. v konst. d ( m v ) F dt F ma F / F Die Koordinate s des Schwerpunkts eines Körpers ergibt sich durch Summation über die Massenpunkte bzw. durch Integration über die Massenelemente des Körpers: r m r dm m m s Beispiel: Körper aus Flächenelementen. Ermittlung des Schwerpunktes eines homogenen Körpers durch Summation über seine Flächenelemente nach dem rechts stehenden Schema: i i i Massenelement (i) Nr. 1 Nr. 2 Summe sx(i) sy(i) A(i) ---- ----- ----- sx(i)·A(i) sy(i)·A(i) Beispiel: beliebiges Dreieck: Der Schwerpunkt liegt im Schnittpunkt der Seitenhalbierenden. Gewichtskraft: FG m g Lineares Kraftgesetz: D = Federkonstante F D s Elastizitätsmodul: F/A =Zug- bzw. Druckspannung E F l A l d Poissonsche Zahl (Querkontraktion): l d l = 0: keine Kontraktion 0,3: typischer Wert = 0,5: Volumenerhaltung Reibung: - Haftreibungskraft: FR H FN µH = Haftreibungszahl - Gleitreibungskraft: FR G FN µG = Gleitreibungszahl - Rollreibungskraft: FR R FN µR = Rollreibungszahl FR f FN r f = Rollreibungslänge - Haften auf schiefer Ebene tan H - Gleiten (Rutschen) auf schiefer Ebene a g (sin G cos ) - Schraube ist Beispiel für schiefe Ebene tan (s = Steigung = Abstand zweier Gänge) (d = Flankendurchmesser) s d beschleunigende Kraft: Trägheitskraft: D´ Alembertsches Prinzip: Fa m a FTr m a N Fi FTr 0 i 1 Impuls eines Körpers mit der Masse m: Impulssatz: In einem abgeschlossenen System (keine Krafteinwirkung von außen), ist der Gesamtimpuls konstant. Raketengleichung: Eine Rakete hat beim Start die Masse m0 und die Geschwindigkeit v0. Während der Beschleunigungsphase wird Masse mit der Relativgeschwindigkeit vTr zur Rakete herausgeschleudert, so dass die Masse m(t) der Rakete mit der Zeit abnimmt und ihre Geschwindigkeit v(t) zunimmt. Kraftstoß: (Wirkt eine Kraft eine Zeit auf einen Körper ein, so bewirkt diese eine Impulsänderung des Körpers) Zweites Newtonsches Axiom verallgemeinert: p mv N pges pi const . i 1 m v (t ) vTr ln 0 v0 g t m(t ) t p Fdt 0 dp F dt Zentraler Stoß zweier Körper: (zweier Körper mit den Massen m1, m2) Der Gesamt-Impuls bleibt beim Stoß immer erhalten. 1. Fall: elastischer Stoß Hierbei bleibt die kinetische Energie beim Stoß vollständig erhalten v: Geschwindigkeit vor dem Stoß u: Geschwindigkeit nach dem Stoß 2 m2 m m2 u1 v2 1 v1 m1 m2 m1 m2 2 m1 m2 m1 u2 v1 v2 m1 m2 m1 m2 v1 u1 v 2 u2 m1 v1 m2 v2 u1 u2 Hierbei haften die Körper nach dem Stoss aneinander, m1 m2 dabei wird kinetische Energie maximal möglich vernichtet 2. Fall: völlig inelastischer Stoß 2.4 Dynamik der Drehbewegung: Zentrifugal- und Zentripetalkraft: Fzf Fzp m ar Fzp m ar Steinerscher Satz: für Massenträgheitsmoment, wenn Drehachse um Strecke s gegen Schwerpunktachse versetzt ist Drehimpuls - allgemeiner Körper: - bei punktförmigem Körper: Drehimpulssatz: Drehmoment - erzeugt durch äußere Kraft m v2 m 2 r r J A JS m s2 berechnet Massenträgheitsmoment JA bezüglich Drehachse A aus Massenträgheitsmoment JS bezüglich Schwerpunktachse S L J Lrp In einem nicht von außen beeinflussten System bleibt der Drehimpuls erhalten. M r FE M D* - erzeugt durch Feder - erzeugt durch Trägheit Corioliskraft Präzessionsbewegung eines mit Drehimpuls L drehenden Körpers, verursacht durch äußeres Drehmoment M dL M J dt Fc 2 m v M p M p L L 2.5 Arbeit, Energie, Leistung: 2.5.1 Arbeit: Arbeit = Kraft x Weg, wobei die Kraft in Wegrichtung zeigt Einheit: 1J = 1 Nm W F s cos W Fs s2 W F ds s1 Hubarbeit: WH FG h m g h Reibungsarbeit: WR FR s FN s Beschleunigungsarbeit: WB F s m a s 12 m v 2 Arbeit der Drehbewegung: M = konstant 2.5.2 W M Energie: potentielle (Lage-)Energie: E pot FG h m g h Spannenergie: (bei Feder) E S 12 D s 2 Bewegungs- oder kinetische Energie: E kin 12 m v 2 Rotationsenergie: wobei das Massenträgheitsmoment JA bezüglich diese Achse A zu nehmen ist E rot 1 J A 2 2 Energiesatz: Im abgeschlossenen System E E pot E S E kin E rot const . ist die Gesamtenergie konstant. p2 2m 2.5.3 Leistung: Leistung: mittlere: momentane: bei linearer Bewegung: bei Drehbewegung P W t dW W dt P F v P M P Wirkungsgrad: WN = Nutzarbeit Wges= insgesamt aufgewandte Arbeit PN = Nutzleistung Pges= insgesamt aufgewandte Leistung W 2.7 Mechanik der Flüssigkeiten und Gase: 2.7.1 Strömung Volumenstrom: A: durchströmte Fläche v : über Fläche gemittelte Strömungsgeschwindigkeit WN P N W ges Pges dV A ds A v dt dt Kontinuitätsgleichung: (Erhaltung des Volumens bei inkompressibler Strömung, d.h. = const) A1 v1 A2 v2 Betriebsdruck: p geodätischer Druck: (Schweredruck) g h dynamischer Druck: (Staudruck) 1 2 Bernoullische Gleichung: resultiert aus p g h 12 v 2 const . Energieerhaltung, gilt also bei reibungsfreier Strömung Torricelli-Ausflusstheorem: Ausströmungsgeschwindigkeit einer Flüssigkeit mit Dichte aus einer Öffnung v2 v 2 gh v 2 p bei Flüssigkeitssäule Höhe h bei Druckdifferenz p dv dx Newtonscher Reibungsansatz: F A Viskosität (dynamische Zähigkeit): kinematische Viskosität: laminare Umströmung einer Kugel: - Reibungskraft: Gesetz von Stokes FR 6 r v Umströmung von Körpern: (turbulent) - Druckwiderstandskraft FD cD 12 v 2 A cD : Druckwiderstandsbeiwert - Strömungswiderstandskraft: FW cW 12 v 2 A cW : Strömungswiderstandsbeiwert Stromlinienkörper: Kugel: Kreisplatte: - dynamische Auftriebskraft: FA c A 12 v 2 AT cW = 0,06 cW = 0,3 cW = 1,2 3. Schwingungen und Wellen: 3.1 Begriffe: Frequenz: f Einheit: Hz = 1/s Kreisfrequenz: = 2 f Einheit: 1/s = Hz Schwingungsdauer: T = 1/f 3.2 Einheit: s ungedämpfte elastische Sinusschwingungen: Anmerkung: Der Index 0 gilt bei ungedämpfter Schwingung. 3.2.1 lineare Schwingung: Federschwingung: - Kraftgleichung: (Federkonstante D = F/s) m s D s 0 - Auslenkung: (Amplitude: ŝ ) s(t ) sˆ sin 0 t - Geschwindigkeit: Amplitude: vˆ sˆ 0 v(t ) vˆ cos0 t - Beschleunigung: Amplitude: aˆ vˆ 0 sˆ 02 a(t ) aˆ sin 0 t - Kreisfrequenz: 0 D m - Schwingungsdauer: T0 2 m D Flüssigkeitsschwingung: l: Länge der Flüssigkeitsfüllung s: Auslenkung aus Ruhelage - Druckdifferenz: p 2 s g - rücktreibende Kraft: F p A 2 s g A - effektive Federkonstante: D 2 g A - träge Masse: m l A - Kreisfrequenz: 0 D m 2 g l - Schwingungsdauer: T0 2 0 2l g 3.2.2 Drehschwingung: Drehschwinger: z.B. Unruhe einer Uhr, Pohlsches Rad - Drehmomentgleichung: J D * 0 (Winkelrichtgröße D* M - Auslenkung: (t ) ˆ sin 0 t - Kreisfrequenz: 0 D * J - Schwingungsdauer: T0 2 J (Amplitude ̂ ) D* Physikalisches Pendel: (kleine Schwingungsamplitude) - rückstellendes Drehmoment: (s = Abstand Achse-Schwerpunkt) - Trägheits-Drehmoment: (JA=Massenträgheitsmoment bezüglich einer beliebigen Achse A) - Kreisfrequenz Schwingung: (JS=Massenträgheitsmoment bezüglich Achse durch Schwerpunkt) M s Fg s m g sin s m g M J A 0 smg smg JA J S m s2 - Schwingungsdauer: T0 2 J S m s2 JA 2 smg smg Mathematisches Pendel: (Punktmasse im Abstand l) (kleine Schwingungsamplitude) Physikalisches Pendel mit JS=0 - Massenträgheitsmoment: J A m l2 - Kreisfrequenz: 0 g l - Schwingungsdauer: T0 2 l g Pendel: (physikalisch oder mathematisch) bei größerer Schwingungsamplitude wird die Schwingungszeit länger Bei Amplitude ̂ 10 wird T um 0,2% größer. Bei Amplitude ̂ 20 wird T um 0,8% größer. ) Zwei gekoppelte mathematische Pendel: 0 g l - gegenphasige Schwingung: 1 g 2D L l m l - Kopplungsgrad: K - gleichphasige Schwingung 2 12 02 12 02 Elektrischer Schwingkreis: 1 U L U C L I I 0 C - Kreisfrequenz: 0 1 L C - Schwingungsdauer: T0 2 L C Viskos gedämpfte Schwingung: Index d kennzeichnet eine Schwingungsgröße im Fall mit Dämpfung. Viskose Dämpfung bedeutet, dass die Bremskraft proportional zur Geschwindigkeit ist. Kraftgleichung: b = Dämpfungskonstante m s b s D s 0 = bremsende Reibungskraft / Geschwindigkeit [b] = N / (m/s) = kg/s Auslenkung: s(t ) sˆ e t sin d t Abklingkonstante = Abklingmaß [ = 1/s Kreisfrequenz ungedämpft: Güte der Schwingung Anschaulich ist die Güte bei kleiner Dämpfung die Anzahl der Schwingungen, nach denen die Amplitude auf e- 4,3% abgefallen ist. Dämpfungsgrad = Lehrsches Dämpfungsmaß [] = 1 Kreisfrequenz gedämpft: 1 s(t) 3.3 - Gleichung: F b R 2m 2mv 0 0 D m Q 0 2 -1 2 1 4 In der Zeichnung ist Q = 15 und 0,21 1 0 2Q d 02 2 0 1 2 2 Schwingungsdauer: Td 2 logarithmisches Dekrement: ln Beispiel Flüssigkeitsschwingung b 8 l und 4 (siehe oben). Wenn bei kleiner Amplitude der Flüssigkeitsfilm an der Wand haften bleibt, gilt: t 0 1 1 4Q 2 d s(t ) Td 2 s(t Td ) d Q 2 14 A Fallunterscheidung nach Größe der Dämpfung: schwache (unterkritische) Dämpfung: Schwingfall: 0 d 0 kritische Dämpfung: aperiodischer Fall: 0 d 0 b2 4 D m überkritische (sehr starke) Dämpfung: Kriechfall: 0 3.3.3 3.4 Elektrischer Schwingkreis: R 2L Abklingkonstante: Kreisfrequenz: d 2 0 1 R L C 2L 2 2 Erzwungene Schwingung: (im eingeschwungenen stationären Zustand) Kreisfrequenz des frei schwingenden ungedämpften Systems: Kreisfrequenz der äußeren Anregung: s sˆ sin t Auslenkung der Masse: äußere Erregung mittels ausgelenkter Feder: Federbewegung Differentialgleichung Amplitude: yt yˆ sin t m s b s D s D y sˆ yˆ 02 2 0 2 2 2 2 innere Erregung mittels Kraft (z.B. bei Unwucht): FE t FˆE sin t wirkende Kraft Differentialgleichung m s b s D s FE Amplitude: sˆ FˆE / m 2 0 2 2 für beide Erregungen gilt: Phase als Funkt. der Antriebsfrequenz arctan 2 02 2 Amplitudenresonanz (maximales ŝ ) bei R 02 2 2 Schwingungsüberhöhung bei Amplitudenresonanz sˆmax 02 Q 0 2 2 sˆ( 0) 2 0 1 1 4Q 2 Phasenresonanz ( 90 ) bei 0 Schwingungsüberhöhung bei Phasenresonanz sˆ( 0 ) 0 Q sˆ( 0) 2 Antriebsleistung = Reibungsverlustleistung P FR v b v 2 12 b vˆ 2 m sˆ 2 2 2 2