VEROFFPP1_korr_2014_9_25
Werbung

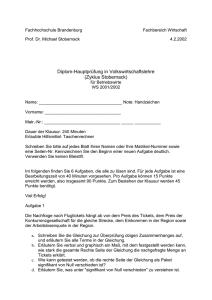
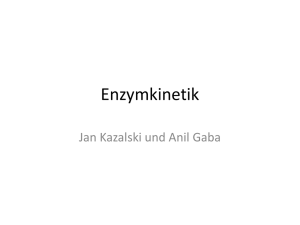
1 (VEROFFPP1_korr_2014_9_25.doc) korrigierte Version vom 25.9.2014 Erstveröffentlicht in: Vereinigte Fachverlage, antriebstechnik 38 (1999), Seite 43 ff. 1. 2. 3. 4. 5. 6. 7. Einführung Die Struktur der Regelung Die Clarke-Park-Transformation und deren Inverse Betrachtungen zu den zwei PI-Reglern Erzeugung der Resolverwertes Bemerkungen zur Hard- und Software Zusammenfassung und Ausblick Zusammenfassung. Blödow, Friedrich, Prof. Dr.-Ing. Digitale Stromregelung eines Linear-Synchron-Motors. Es wird die Stromregelung eines Linear-Synchron-Motors mit Hilfe eines digitalen Signalprozessors (DSP TMS320F240) beschrieben. Die Grundstruktur der Regelung beinhaltet die Clarke-Park-Transformation. Besonders intensiv wird auf die Auslegungskriterien der vier Parameter der beiden PI-Regler eingegangen. Meinem Doktorvater Univ. Prof. Dr.-Ing. Dr.-Ing. Eh. R. Lunderstädt zum 60. Geburtstag. Digitale Stromregelung eines Linear-Synchron-Motors. Abstrakt. Digitale Signalprozessoren (DSP), die auf einem Silizium-Chip alle für eine Regelung einer Synchron-Maschine notwendigen Funktionen integriert haben, sind erst seit ca. Anfang 1998 den Hochschulen verfügbar. Mit der Verarbeitungsgeschwindigkeit dieser SingleChip-DSPs lassen sich momentan Stromregelungen mit einer Abtastrate von 20 KHz realisieren. Damit können erstmals die Vorteile von digitalen Regelungen , wie z. B. geringes Driftverhalten und einfache Parametrierung, auch in diesem Bereich konsequent verwirklicht werden. Am Beispiel eines Linear-Synchron-Motors und dem Single-Chip-DSP von Texas Instruments TMS320F240 wird die Stromregelung mit Hilfe der Clarke-ParkTransformation besprochen. 1 Einführung. Für Positionieraufgaben, die eine hohe Präzision (1 µm) und schnelle Verfahrgeschwindigkeiten (bis 1 m/Sek) verlangen, eignet sich der Linear-SynchronAntrieb besonders, da im Gegensatz zu den rotatorischen Motoren keine Umsetzung der Drehbewegung in die Längsbewegung benötigt wird. Es entfällt somit z.B. die 1 2 Kugelrollspindel mit ihrer Haftreibung b. z. w. Lose. Durch diesen Direktantrieb entstehen somit steifere Systeme, die sich noch präziser und schneller regeln lassen. Auch die Luftlagerung ist damit praktisch realisierbar geworden, was ebenfalls der Präzision zu Gute kommt, mit dem Nebeneffekt, das Haftreibungen nun real vernachlässigbar sind. Eingesetzt wird diese Technik u.a. in Leiterplattenbearbeitungsautomaten der Firma WESSEL. Im Synchron-Linear-Motor muß nun, um eine Positionierregelung aufbauen zu können, im ersten Schritt, wie auch in den rotatorischen Motoren, der Strom geregelt werden. Dies kann analog oder digital erfolgen, wobei die digitale Regelung u.a. hinsichtlich der Bauteile- und Produktionskosten Vorteile bietet. In diesem Beitrag wird die digitale Stromregelung mit einem digitalen Signalprozessor über die Vektor-Kontroll-Methode besprochen, die analog nur unter erheblichen Mehrkosten zu realisieren ist. Dieses Regelungskonzept ergibt eine hervorragende Dynamik-Performance, und konstante vorgebbare Beschleunigungswerte bei allen Geschwindigkeiten, wobei der Vier-Quadranten-Betrieb mit inbegriffen ist. Die Vektor-Kontroll-Methode über die Clarke-Park-Transformation entkoppelt den Polradwinkel von der Beschleunigung, womit als einzige Eingangsgrößen in das System die Beschleunigung vorgegeben werden kann. Auf die vier Parameter der beiden PIRegler, die in diesem Konzept einzustellen sind, wie auf die Berechnung des notwendigen Resolverwertes aus dem Positionswert, der naturgemäß bei einem Linear-SynchronAntrieb zunächst nicht vorhanden ist, wird besonders eingegangen. 2. Struktur der Regelung. Bild 1 zeigt die Struktur der Regelung. Die zu regelnde Strecke, ein Linear-SynchronMotor, der in einem Maschinenbett einer Leiterplattenbohrmaschine der Firma Wessel integriert ist, wird im unteren Teil von Bild 1 gezeigt. Als Meßglieder sind ein HEIDENHAIN-Längenmeßsytem mit 40 µm Teilungsperiode, und zwei LEM-Hall-StromSensoren eingesetzt worden. Aus dem Längenmeßsystem wird der Resolverwert berechnet, und die beiden Stromsensoren erfassen die Ströme in zwei Phasen des Motors. Zur Messtrecke werden auch der Analog-Digital-Wandler und die Clarke-ParkTransformation gezählt. Die Ausgangsgrößen der Clarke-Park-Transformation entsprechen dem Polradwinkel und der Beschleunigung. Da der Polradwinkel f bei einem Linear-Synchron-Motor zu Null geregelt wird, fehlt verständlicherweise der Summationspunkt vor dem PI-Regler 2. Lediglich das eingezeichnete P-Glied mit der Verstärkung -1 repräsentiert rudimentär den Summationspunkt. Der zweite Summationspunkt vor dem PI-Regler 1 bildet die Differenz zwischen der SollBeschleunigung und der Ist-Beschleunigung, die der Regler dann verarbeitet. Die Ausgänge der beiden PI-Regler werden in die inverse Clarke-Park-Transformation geleitet, die ihrerseits als Ausgangsgrößen die notwendigen Spannungen der drei Phasen liefert. Der hierauf folgende Pulsweiten-Modulator (PWM 20KHz) und das Leistungsteil, bestehend aus 6 Leistungshalbleitern zusammengeschaltet zu drei Halbbrücken, sind als das Stellglied des Regelkreises zu betrachten. Damit ist der Regelkreis geschlossen. 2 3 Texas Instruments DSP TMS320F240 Inverse ClarkePark PI 2 ibPI PWM icPI 20 KHz 2 LEM-Strom-Wandler Beschleunigungssollwert PI 1 iaPI ia isd Clarke- isq Ib Park A/D 10 Bit Resolverwert HAIDENHAIN Stahllineal 40µm Teilungsperiode BAUTZ Synchron-Linear-Motor WESSEL Maschinenbett Bild1: Struktur der digitalen Stromregelung. 3. Die Clarke-Park-Transformation und deren Inverse Die Clarke-Park-Transformation bildet die drei Strangströme einer Linear-SynchronMaschine in Abhängigkeit der Stellung der Magnetfelder zueinander (Resolverwert) in ein rechtwinkliges Koordinatensystem ab, wobei auf der Abszisse die Beschleunigung aufgetragen wird und auf der Ordinate der Polradwinkel. Regelungstechnisch gesehen besitzt die Transformation also drei Eingangsgrößen, die Ströme ia und ib und den Resolverwert ( der dritte Strom ergibt sich aus ic = -ia -ib), und zwei Ausgangsgrößen, die Beschleunigung und den Polradwinkel. Die Gleichungen lauten 2 1 i sq sin( ) i a cos( ) ia ib 3 3 (1) 3 4 , und 1 2 isd cos( ) ia sin( ) ia ib 3 3 (2) mit isq der Beschleunigungskomponenten , isd der Polradwinkelkomponenten, dem Resolverwert, und ia und ib den beiden Strangströmen. Ein Polradwinkel verschieden Null verschlechtert den Wirkungsgrad einer Synchronmaschine, deshalb wird dieser zu Null geregelt. Damit verbleibt als Sollwert für die Regelung die Beschleunigung. Die beiden Ausgangsgrößen dieser beiden Regler werden zusammen mit der Resolverinformation in die inverse Clarke-Park-Transformation geleitet, die daraufhin die drei Strangstrominformationen liefert. Die Gleichungen der inversen Clarke-Park-Transformation lauten iaPI isdPI cos( ) isqPI sin( ) (3), 1 3 i bPI i sdPI cos( ) i sqPI sin( ) i sdPI sin( ) i sqPI cos( ) 2 2 (4), und 1 3 i sdPI sin( ) i sqPI cos( ) i cPI i sdPI cos( ) i sqPI sin( ) 2 2 (5), mit iaPI, ibPI und icPI den Strominformationen, die über die PWM den Leistungstransistoren zugeführt werden, der Resolverinformation, und isdPI und isqPI den Ausgangsgrößen der beiden PI-Regler. 4. Betrachtungen zu den zwei PI-Reglern Der PI-Regler wird im Zeitbereich über die Gleichung (6) T y PI k I e(t )dt y PI 0 k P e(t ) (6) 0 beschrieben, mit kI und kP den einzustellenden Regelparametern, e(t) der Eingangsgröße in den PI-Regler und yPI0 der Anfangsbedingung. Durch einmaliges Differenzieren der Gleichung (6) und Transformation in den Bildbereich erhält man die Gleichung (7) 4 5 1 YPI ( s) k I kP s kI E (s) s (7) Deutlich ist im Zähler der Gleichung (7) ein Hochpaß mit der Zeitkonstanten TH kP kI (8) zu erkennen. Dieser Hochpaß wird i. a. auf den Tiefpaß der Strecke gelegt. Im Falle des Linearmotors lautet die Gleichung des Tiefpasses 1 I (s) R U (s) L 1 s R (9) mit U(s) der Eingangsspannung an einer Phase und I(s) dem Strom in der Phase. Bildet man jetzt die Übertragungsfunktion des offenen Kreises, mit kP L kI R (10) ,setzt also die Zeitkonstante des Hochpasses gleich der Zeitkonstanten des Tiefpasses, so verbleibt der Ausdruck (11) kI I ( s) G0 R E ( s) s (11) Nun kann der Regelkreis geschlossen werden, und die Führungsübertragungsfunktion (12) lautet zunächst allgemein Gw G0 ( s ) 1 G0 ( s ) G M ( s ) (12) mit GM(s)=1 und der Einheit V/A. Wird jetzt (11) in (12) eingesetzt und umgeformt, erhält man die Gleichung (13) 5 6 G w ( s) 1 R 1 s kI (13) oder etwas anschaulicher die Gleichung (14) I ( s) 1 W ( s) R 1 s kI (14) mit I(s) dem Strom in der Phase und W(s) dem Stromsollwert als Spannung. Es ist also durch die Regelung hinsichtlich des Stromes ein Tiefpaß mit der Zeitkonstanten Tneu R kI (15) entstanden, wobei diese Zeitkonstante über kI i. a. so gewählt wird, daß die Zeitkonstante Tneu 1/10 der alten Zeitkonstante L/R beträgt. Damit schwingt der Strom um den Faktor 10 schneller ein, als ohne Stromregelung. Eine Regelabweichung ist laut Gleichung (14) nicht vorhanden. Diese Vorgehensweise ist in analogen Regelungen im vollem Umfange realisierbar. (Hinweis: Die Einheitenkontrolle ist unter Berücksichtigung des Meßgliedes mit der Einheit V/A im Nenner der Gleichung (15) durchzuführen) Im Falle einer digitalen Regelung sind zwei weitere Aspekte zu betrachten: Es ist zum einen die Abtastzeit. Sie muß so klein sein, daß die Regelung als quasikontinuierlich betrachtet werden kann. Das ist dann der Fall, wenn die schnellste im System zu bearbeitende Zeitkonstante mindestens 10 mal abgetastet wird. Dies trifft in dem hier beschriebene Fall zu. Der zweite Aspekt betrifft die Auflösung des AnalogDigital-Wandlers, hier 10 Bit. Da der Strom positive, wie negative Werte annimmt, wird ein Bit für das Vorzeichen benötigt. Es verbleiben somit 9 Bit entsprechend 512 Stufen. Wie bekannt, entspricht jede klassische digitale Regelung bei Erreichen des stationären Endwertes einer Zweipunktregelung. Diese Zweipunktregelung schwingt in diesem Fall um das last significant bit des Analog-Digital-Wandlers, wenn nicht Verstärkungsfaktoren im Regelkreis dieses Quantisierungsrauschen verstärken. Da das Quantisierungsrauschen des Stromes direkt über den Soll-Ist-Wertvergleich vor dem PI-Regler mit dem kP des Reglers multipliziert wird, werden KP-Werte größer 1 das Quantisierungsrauschen proportional verstärken. Die Vorgehensweise zur Bestimmung von kP ist nun die folgende: Zunächst wird kP=1 gewählt, hieraus das kI berechnet und die Stromregelung erstmalig in Betrieb genommen. Danach wird kP Stückweise erhöht, mit gleichzeitiger Berechnung von kI , bis Schwingungen in der Regelung auftreten und/oder das Rauschen akustisch bewertet ein nicht vertretbares Maß angenommen hat. 6 7 Dieser kP -Wert ist zu 100% anzusetzen und dann auf 75% zu reduzieren, um eine entsprechende Sicherheitsabstand für Parameterschwankungen bereitzustellen. Bei vorgegebenem kP berechnet sich das kI aus der Gleichung (10) zu kI kP R L (16), mit L/R der elektrischen Zeitkonstanten des Antriebes. Diese kann aus den Daten der Maschine entnommen werden, oder wie hier, meßtechnisch ermittelt werden. Aufgrund der beschriebenen Vorgehensweise wurde ein kP von 2 gewählt. Bild 2 zeigt die Stromsprungantwort in den Phasen ia und ib gemessen an den Ausgängen der LEM-Stromwandler in geregeltem Zustand. Die Zeitkonstante beträgt ca. 1,5 Millisekunden, d. h. in 1,5 Millisekunden sind 63% des Stromsollwertes bereits erreicht. Bild 2: Stromsprungantwort in den Phasen ia und ib. 7 8 5. Erzeugung des Resolverwertes Um in dem Motor eine kontinuierliche Beschleunigung verwirklichen zu können, muß stets die Lage der Magnetfelder zwischen Primär und Sekundärteil bekannt sein, ansonsten wäre es nicht möglich, die Magnetfelder über die Ströme entsprechend zu regeln. Da bei Linear-Motoren ein derartiger Sensor nicht kostengünstig realisierbar ist, wird der Resolverwert aus der Position des Primärteiles berechnet. Wie dies mit den Single-ChipDSP realisiert wurde, zeigt das nachstehende Programmstück. Selbstverständlich ist die Kommutatorlänge und die Auflösung des Längenmeßsystems bekannt. ; Wandle Inkrementalwert des Längenmeßsystems ; posilow und posihigh = 32-Bit-Signed zum Resolverwert ; Eingang : posilow und posihigh, die Kommutatorlaenge und Komuscale. ; Ausgang: Resolverwert im Bereich 0 bis ffffh entsprechen 0 bis 360 Grad = Winkel ; Dies Routine benötigt ein Grundzeit von 2. µ-Sek., ; jeder weiterer Add- oder Sub-Durchlauf benötigt weitere 250 n-Sek. ; *********************************************************************** resol ldp #dp300 setc sxm ; bit posihigh,bit15 ; teste Vorzeichen bcnd relo1,tc ; Bit32=1 negativ ;------------------ position ist positiv clrc sxm lacc posihigh,16 ; Bit32=0 von posihigh add posilow ; lade den accu 32 bit setc sxm ; damit sub ueber 32 bits relo3 sub kommulaenge ; Wert positiv, subtrahiere so lange, bis negativ bcnd relo3,geq ; immer noch positiv add kommulaenge ; jetzt negativ, schiebe durch Addition in den in positiven Bereich sacl resolver ; Zwischenergebnis, normiere jetzt auf 0 bis ffffh clrc sxm ; lt resolver ; mpy komuscale ; pac ; preg in den accu sacl resolver ; Ergebnis sichern sub #0ffffh bcnd relo6,leq ; alles o. k. lac #0ffffh ; Multiplikation ergab größer ffffh = Rundungsfehler sacl resolver ; korrigiere diesen Fehler b relo6 ; fertig ;------------------------- Position ist negativ relo1 clrc sxm lacc posihigh,16 ; Bit15 1 von posihigh add posilow ; lade den accu 32 bit setc sxm ; damit add ueber 32 bits relo4 add kommulaenge ; Wert neg, add so lange bis positiv bcnd relo4,leq ; immer noch negativ sub kommulaenge ; pos, schiebe durch sub zurueck in den neg. Bereich abs ; mache pos sacl resolver ; Zwischenergebnis, normiere jetzt auf 0 bis ffffh clrc sxm ; lt resolver ; mpy komuscale ; pac ; preg in den accu 8 9 neg sacl sub bcnd lac sacl b resolver #0ffffh relo6,leq #0ffffh resolver relo6 ; ; sichere Ergebniss ; alles ok ; multi ergab größer ffffh=Rundungsfehler ; korrigiere diesen Fehler relo6: lac sacl ret resolver winkel ; = Kommutatorwinkel 0-360 Grad => 0-ffffH 6. Bemerkungen zur Hard- und Software Der Kern der Hardware ist ein Festkomma 16 Bit digitaler Chingle-Chip-Signalprozessor TMS320F240 von Texas Instrument. Er wird mit 50 n-Sekunden getacktet und führt ca. 90% seiner Befehle innerhalb dieser Zeit auch aus. Auf dem Chip integriert in ein Zweikanal 10 Bit-Analog-Digital-Wandler mit jeweils 8 Kanälen zur gleichzeitigen Wandlung der beiden Strangströme. Zur Erfassung und Aufbereitung von inkrementalen Signale aus dem Längenmeßsystem ist ebenfalls eine 16 Bit-Einheit vorhanden. Die Ausgabeeinheit, der Pulsbreitenmodulator, kann im asymmetrischen, im symmetrischen und im Space-Vektor-Mode betrieben werden. Im symmetrischen Mode und SpaceVektor-Mode werden PWM-Frequenzen von 10 KHz erreicht, was im Zusammenhang mit den dynamischen Anforderungen der Anwendung als nicht ausreichend bewertet wurde. Auch die Vorteile der Space-Vektor-PWM scheinen durch die Veröffentlichung [1] relativiert worden zu sein. Mit der verwendeten asymmetrischen PWM wurde eine Frequenz von 20 KHz erreicht. Die Software wurde ausschließlich in Assembler mit Unterstützung eines C-Compilers geschrieben. Bereichsabfragen mit 32-Bit-Variablen, wie z. B. If((input<=constante1)||(input>=constante2 )) wurden in C formuliert, danach in die ASM-Memonik übersetzt, aufbereitet und erst dann implementiert. Die Clarke-Park-Transformationen, die Sinus- und Cosinus-Berechnungen und weitere Routinen wurden aus den Veröffentlichungen [2, [3], [4], [5], und [6] entnommen, während die PI-Regler selbst entworfen wurden. Auch wurde die Anzahl der Stützstellen zur Berechnung der Sinus- und Cosinuswerte zwecks Steigerung der Genauigkeit von128 auf 256 Stützstellen erhöht. Besondere Aufmerksamkeit ist dem Wind-Up-Effekt in den PI-Reglern zu schenken. Die Durchlaufzeit durch die gesamte Software beträgt 45 µ-Sekunden. 7. Zusammenfassung und Ausblick Der Stromregelkreis in einer Positionierregelung ist der schnellste Regelkreis in dem System. Um einen Vorstellung von der Geschwindigkeit zu vermitteln, sei die Positionierzeit einer Leiterplattenbohrmaschine von Loch zu Loch mit 200 Millisekunden vorgegeben. Damit teilt sich der Positioniervorgang auf in 100 Millisekunden für das Beschleunigen und 100 Millisekunden für das Bremsen auf. Wird der Positionierregelkreis mit einer Taktrate von 2 Millisekunden betrieben, so fallen 50 Abtastungen auf den 9 10 Bremsvorgang, was eine gutes, aber kein hervorragendes Positionierverhalten ergibt. In der dreifachen Positionierkaskade ist der Positionierregelkreis der äußerste, der Mittlere ist der Geschwindigkeitsregelkreis, und der Innerste ist der Stromregelkreis. Um hervorragende Ergebnisse zu erzielen, sollte davon ausgegangen werden, daß der Mittlere Regelkreis (Geschwindigkeitsregelkreis) um den Faktor 5 schneller einschwingt, als der Positionsregelkreis, und der innerste Regelkreis (Stromregelkreis) wiederum ein um den Faktor 5 schnelleres Einschwingverhalten zeigen sollte. Damit ergibt sich für den Stromregelkreis eine Zeitkonstante von 80 µ-Sekunden. Wird dieser Regelkreis digital ausgeführt, so sollte auf diese Zeitkonstante 10 Abtastungen fallen. Dies ergibt eine Rechenzeit von 8 µ-Sekunden in der die gesamte Stromregelung abgearbeitet sein muß. Eine Forderung, die mit den momentan für diesen Zweck verfügbaren Digitalrechnern nicht zu realisieren ist. Das in diesem Beitrag gezeigte Beispiel erreicht eine Rechenzeit von 50 µ-Sekunden, was eine Zeitkonstante von 500 µ-Sekunden für den Stromregelkreis ergeben kann und damit an der Spitze des marktüblichen liegt. Aus dieser Sicht ist eine optimale digitale Regelung noch nicht erreicht, aber immerhin liegt lediglich ein Faktor von 6,25 von dem optimalen Verhalten entfernt. Eine andere Möglichkeit wäre, die Stromregelung über den Zustandsraum mit linearem Regelgesetz zu verwirklichen. Erste Untersuchungen sind erfolgversprechend. Die Nachteile des PI-Reglers im Zusammenhang mit der eingesetzten Pol-Nullstellen-Kompensation, die in der Grundstruktur die bekannten Parameterempfindlichkeiten beinhaltet, treten im Zustandsraum nicht auf. Auch zeigen erste Untersuchungen kleinere Rechenzeiten, da nur die inverse Clarke-Park-Transformation abgearbeitet werden muß. Es ist vorgesehen, nach Beendigung dieser Untersuchungen, die Ergebnisse zu veröffentlichen. Literatur: [1] Zhenyu, Yu; Figoli, David; AC Induction Motor Control Using Constant V/Hz Principle and Space Vector PWM Technique with TMS320C240. Application Report: SPRA284A, Texas Instruments, April 1998. [2] Alter, David M.; Obtaining Absolute Encoder Position on a TMS320C240 Application Brief: SPRA279, Texas Instruments, July 1997. [3] N.N ; Field Orientated Control of 3-Phase AC-Motors. Application Report: BPRA073, Texas Instruments, February 1998. [4] N.N ; Table Look-up and Interpolation on the TMS320C2XX Application Report: BPRA046 Texas Instruments, 1997. [5] N.N ; Sine, Cosine on the TMS320C2XX 10 11 Application Report: BPRA047 Texas Instruments, 1997. [6] N.N ; Clarke & Park Transformation on the TMS320C2XX Application Report: BPRA048 Texas Instruments, 1997. 11