Mathematik für Informatiker
Werbung

Mathematik für Informatiker
Prof. Dr. Martin Henk,
Dr. Michael Höding,
Janine Bastian, Matthias Henze, Eva Linke
Otto-von-Guericke-Universität Magdeburg
Math4Inf
1 / 567
Math4Inf
2 / 567
Teil I
Mathematik I
Math4Inf
2 / 567
•
Informationen zu der Vorlesung, Folien und Skript der
Vorlesung, Übungszettel etc. nden sich unter
http://www.math.uni-magdeburg.de/~henk/lectures/
math4inf
Spielregeln
Math4Inf
3 / 567
Bemerkung 0.1.
Für reelle Zahlen x , y , z gilt:
i) x
≤y
ii) x
≤ y,
iii) x
≤y
und z
iv) x
≤ y,
dann
v) 0
Schulsto
und y
≤ z,
dann x
< x ≤ y,
dann x
≤ z.
± z ≤ y ± z.
≥ 0,
dann x
· z ≤ y · z.
−x ≥ −y .
dann
1
1
x ≥ y > 0.
Math4Inf
4 / 567
Notation 0.2 [Betrag].
Für eine reelle Zahl x heiÿt
(
|x | =
x,
falls x
−x ,
falls x
≥ 0,
≤ 0.
der Betrag von x .
Bemerkung 0.3.
Für reelle Zahlen x , y gilt:
i)
ii)
iii)
Schulsto
|x | ≥ 0
mit Gleichheit nur für x
= 0.
|x · y | = |x | · |y |.
|x + y | ≤ |x | + |y |
(Dreiecksungleichung).
Math4Inf
5 / 567
!
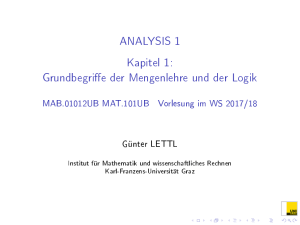
sin α
α
cos α
Abbildung: Sinus, Cosinus am Einheitskreis
Bemerkung 0.4.
i) sin(α + 2π)
ii) sin(−α)
2
iii) sin
= sin α,
= − sin α,
2
cos(α
+ 2π) = cos α,
cos(−α)
α + cos α = 1,
= cos α,
(Phytagoras)
1
iv) sin(α + β)
= sin α cos β + cos α sin β und
cos(α + β) = cos α cos β − sin α sin β . (Additionstheoreme)
Schulsto
1 Pythagoras von Samos, 582507
Math4Inf
6 / 567
Notation 0.5.
Zur Abkürzung längerer Summen oder Produkte schreibt man
n
X
i =1
n
Y
i =1
ai
= a1 + a2 + . . . + an ,
ai
= a1 · a2 · . . . · an .
Bemerkung 0.6.
Seien ai
j
Zahlen für 1
≤ i ≤ n,
n X
m
X
i =1 j =1
Schulsto
ai
1
≤ j ≤ m.
j=
m X
n
X
j =1 i =1
Math4Inf
Dann ist
ai
j.
7 / 567
Notation 0.7.
Sei a eine reelle Zahl, und n eine nicht-negative ganze Zahl.
i) an
ii) a
iii)
= a · a · ... · a
(n-mal),
0
= 1,
−n = 1 ,
a
a
n
a
6= 0.
Notation 0.8.
Sei a eine nicht-negative reelle Zahl und n eine positive ganze Zahl.
Dann gibt es genau eine nicht-negative reelle Zahl x mit x
wird mit
√
n
a bezeichnet. Für n
Ist n ungerade und a
<0
=2
schreibt man auch nur
so ist auch
√
n
a
√
= − −a
n
n = a;
√
x
a.
deniert.
Notation 0.9.
Für eine nicht-negative reelle Zahl a und positive ganze Zahlen m , n
deniert man
a
a
Schulsto
m
n
m
−n
=
=
√
n
am
1
a
m
,
=
a
√ m
n
a
,
6= 0.
n
Math4Inf
8 / 567
Bemerkung 0.10.
Für reelle Zahlen x , y und rationale Zahlen p , q gilt
i) x p
ii)
iii)
iv)
v)
· x q = x p +q ,
x
p−q , x 6= 0,
x =x
p p
p
x · y = (x · y ) ,
p
x
x
y = y , y 6= 0,
(x p )q = x p·q .
p
q
p
p
Diese Regeln gelten auch für beliebige reelle Exponenten p , q.
Schulsto
Math4Inf
9 / 567
Notation 0.11 [Logarithmus].
Seien a, b positive reelle Zahlen, b
b
x =a
6= 1.
Die eindeutige Zahl x mit
heiÿt Logarithmus von a zur Basis b und wird logb a
bezeichnet.
2
Ist die Basis gegeben durch die Eulersche
Zahl e
= 2, 71828182...,
dann heiÿt
ln a
= loge a
natürlicher Logarithmus.
Schulsto
2 Leonhard Euler, 1707 1783
Math4Inf
10 / 567
Bemerkung 0.12.
i) b logb a
= a,
logb b
ii) logb (a · c )
iii)
iv)
= 1,
logb 1
= logb a + logb c ,
log a
logc a =
,
log c
n
logb (a ) = n · logb a,
= 0,
logb
a
c = logb a − logb c .
b
b
v) logb a · loga b
vi) a
Schulsto
logb
= 1,
c = c log a .
b
Math4Inf
11 / 567
Vereinbarung 1.1 [Aussagen ].
3
Eine Aussage ist ein sprachliches Gebilde, von dem es sinnvoll ist zu
sagen, es sei wahr
(w )
oder falsch
(f ).
Eine Aussage also ist ein
Satz, der entweder wahr oder falsch ist, aber nie beides zugleich.
w und f heiÿen Wahrheitswerte der Aussage A.
•
12 ist durch 6 teilbar ist eine wahre Aussage.
•
Jede gerade Zahl
≥4
ist Summer zweier Primzahlen ist eine
Aussage. Wahrheitswert unbekannt (Goldbachsche
4
Vermutung ).
•
Dieser Satz ist falsch ist keine Aussage.
3 Aristoteles, 384 322
4 Christian Goldbach, 1690 1764
Aussagen und Mengen
Math4Inf
12 / 567
•
Aus gegebenen Aussagen gewinnt man durch Verknüpfungen
(Junktionen) neue Aussagen, sogenannte Aussageformen.
Denition 1.2 [Negation, Konjunktion, Disjunktion].
Seien A und B Aussagen.
Aussageform
Symbol
Sprechweise
Negation von A
A
nicht A
Konjunktion von A und B
A
∧B
A∨B
A und B
Disjunktion von A und B
•
A oder B .
Die Wahrheitswerte einer Aussageform werden in
Wahrheitstafeln angegeben:
A
A
A
B
∧B
A
B
w
f
w
w
w
w
w
f
w
w
f
f
w
f
w
f
w
f
f
w
w
f
f
f
f
f
f
Aussagen und Mengen
A
Math4Inf
A
∨B
w
13 / 567
•
Weitere Aussageverbindungen, die insbesondere in der
Mathematik verwendet werden, sind Implikationen.
Denition 1.3 [Implikation].
Seien A und B Aussagen. Die Aussage wenn A gilt, dann gilt B wird Implikation (oder logische Folgerung) genannt und mit A
⇒B
bezeichnet. Ihre Wahrheitswerte sind gegeben durch
A
⇒B
A
B
w
w
w
w
f
f
f
w
w
f
f
w
.
Weitere Sprechweisen: aus A folgt B , A impliziert B , A ist
hinreichend für B , oder B ist notwendig für A .
Aussagen und Mengen
Math4Inf
14 / 567
Denition 1.4 [Äquivalenz].
Seien A und B Aussagen. Die Aussageform
(A ⇒ B ) ∧ (B ⇒ A)
heiÿt Äquivalenz und wird mit A
⇔B
bezeichnet.
Sprechweisen: A ist gleichwertig mit B , A gilt genau dann, wenn
B gilt , A gilt dann und nur dann, wenn B gilt , A ist
äquivalent zu B oder A ist notwendig und hinreichend für B .
•
Aussagen und Mengen
A
⇔B
A
B
w
w
w
w
f
f
f
w
f
f
f
w
Math4Inf
15 / 567
Bemerkung 1.5.
Für Aussagen A und B gilt, d.h. die folgenden Aussagen sind wahr:
i)
iii)
(A ∧ B ) ⇔ (A ∨ B ),
ii)
(A ⇒ B ) ⇔ (B ⇒ A) ⇔ A ∧ B ,
iv)
(A ∨ B ) ⇔ (A ∧ B ),
(A ⇔ B ) ⇔ (A ⇔ B ).
Bemerkung 1.6.
Für Aussagen A, B und C gilt:
Aussagen und Mengen
i)
((A ⇒ B ) ∧ (B ⇒ C )) ⇒ (A ⇒ C ),
ii)
((A ⇔ B ) ∧ (B ⇔ C )) ⇒ (A ⇔ C ).
Math4Inf
16 / 567
Logische Schlüsse sind Aussageformen, die ausgehend von wahren
Aussagen (Voraussetzungen) wieder wahre Aussagen liefern. Sie
sind die Grundlage für alle mathematischen Beweise. Die
gebräuchlichsten Beweismethoden in der Mathematik sind:
1. Direkter Beweis einer Implikation A
⇒ B:
Aus der Voraussetzung (Prämisse) A wird die Behauptung
(Konklusion) B abgeleitet, indem gezeigt wird, dass die
Implikation A
⇒B
wahr ist.
2. Indirekter Beweis oder Widerspruchsbeweis einer Implikation
A
⇒ B:
Anstatt der Implikation A
B
⇒A
⇒B
kann man auch die Implikation
nachweisen, oder zeigen, dass die Konjunktion A
∧B
falsch ist, d.h. zu einem Widerspruch führt (vgl. Bemerkung
1.5 iii)).
3. Beweis einer Äquivalenz A
⇔ B:
Man beweist die Aussageformen A
Aussagen und Mengen
⇒B
Math4Inf
und B
⇒ A.
17 / 567
Vereinbarung 1.7 [Mengen ].
5
Eine Menge ist eine Zusammenfassung von verschiedenen Objekten
zu einer Gesamtheit. Die Objekte in einer Menge heiÿen Elemente
der Menge. Weiterhin fordern wir, dass für jedes nur vorstellbare
Objekt eindeutig entschieden werden kann, ob es ein Element der
Menge ist oder nicht.
Notation 1.8.
Die Aussage x ist ein Element der Menge M wird mit x
bezeichnet, die Negation mit x
∈
/ M,
∈M
d.h. x ist kein Element der
Menge M .
5 Georg Cantor, 18451918
Aussagen und Mengen
Math4Inf
18 / 567
Notation 1.9 [Beschreibung von Mengen].
•
Aufzählung der Elemente, z.B.,
M
= {1, 2, 3, 4, 5},
• N = {1 , 2 , 3 , 4 , 5 , . . . }
M
= {◦, , ?}.
ist die Menge der natürlichen Zahlen
• Z = {. . . , −3, −2, −1, 0, 1, 2, 3, . . . }
ist die Menge der ganzen
Zahlen
•
Beschreibung von Eigenschaften, z.B.,
M
= {alle
geraden positiven natürlichen Zahlen}
= {n ∈ N : n
ist Vielfaches von 2}
= {2 n : n ∈ N}
• Q = { qp : p ∈ Z, q ∈ N}
• R
ist die Menge der rationalen Zahlen
bezeichnet die Menge der reellen Zahlen
• ∅ = {}
Aussagen und Mengen
bezeichnet die leere Menge
Math4Inf
19 / 567
•
6
Russellsche Antinomie . Sei M die Menge aller Mengen, die
sich nicht selbst enthalten, d.h.,
M
= {X : X ∈
/ X }.
∈ M?
Ist M ∈ M, dann muss M die Bedingung M ∈
/ M erfüllen!
Ist M ∈
/ M, dann gilt nach Denition von M aber M ∈ M!
Ist M
I
I
Im Sinne unserer Vereinbarung ist M keine Menge!
6 Bertrand Russell, 18721970
Aussagen und Mengen
Math4Inf
20 / 567
Denition 1.10 [Allquantor und Existenzquantor].
Sei M eine nichtleere Menge und für jedes x
∈M
sei A(x ) eine
Aussage.
∈ M gilt A(x ) wird mit
: A(x ) bezeichnet; ∀ heiÿt Allquantor.
i) Die Aussage für alle x
∀x ∈ M
ii) Die Aussage es gibt ein x
∃x ∈ M : A(x )
bezeichnet;
∈ M , für das A(x ) gilt wird
∃ heiÿt Existenzquantor.
mit
Bemerkung 1.11.
Seien A(x ), x
∈ M,
Aussagen. Es gilt:
∀x : A(x ) ⇔ ∃ x : A(x )
Aussagen und Mengen
und
∃ x : A(x ) ⇔ ∀x : A(x ).
Math4Inf
21 / 567
Erklärung 1.12 [Vollständige Induktion].
= {k , k + 1, k + 2, . . . }, wobei k eine ganze Zahl ist, und
seien A(n ), n ∈ M , Aussagen. Zum Beweis der Aussage
∀n ∈ M : A(n) verwendet man häug das Prinzip der vollständigen
Sei M
Induktion:
i) Induktionsanfang: Man zeigt, dass die Aussage für n
=k
gilt,
also A(k ).
ii) Induktionsschritt: Man zeigt die Implikation A(n)
⇒ A(n + 1).
In Worten: Wir zeigen zunächst, dass für die kleinste Zahl in M die
Aussage gilt, d.h., A(k ). Dann beweisen wir für jedes n, dass aus
A(n ) die Aussage A(n
Aussagen und Mengen
+ 1)
folgt.
Math4Inf
22 / 567
Satz 1.13 [Geometrische Reihe].
Sei x
∈ R,
x
6= 1,
n
X
i =0
Beweis.
Für n
und sei n
∈N
∈ N.
x
i=
Dann gilt
1
− x n +1
.
1−x
(1.1)
sei A(n ) die Aussage (1.1).
i) (Induktionsanfang) Wir zeigen, dass A(1) wahr ist, denn
1
X
i =0
x
i = x 0 + x 1 = 1 + x = (1 + x ) 1 − x =
1−x
− x2
.
1−x
1
ii) (Induktionsschritt) Wir folgern A(n
+ 1) aus A(n):
!
n
n +1
X
i + x n +1 = 1 − x
i
x
x =
+ x n +1
1−x
A
(n )
i =0
i =0
n+1 + x n+1 (1 − x )
n +2
1−x
1−x
=
=
.
1−x
1−x
n +1
X
Aussagen und Mengen
Math4Inf
23 / 567
Beispiel 1.14.
Für n
∈N
sei A(n ) die Aussage, dass in jeder Gruppe von n
Studenten, in der einer Mathematik studiert, alle Mathematik
studieren.
•
Induktionsanfang: A(1) ist sicherlich wahr.
•
Induktionsschritt: Sei M eine Gruppe von n
+1
Studenten, die
wir mit s1 , . . . , sn+1 bezeichnen. Sei s2 ein Mathematikstudent.
A(n ) angewendet auf die Gruppe
{s2 , . . . , sn+1 }
{s1 , . . . , sn }
und
zeigt, dass s1 , . . . , sn und s2 , . . . , sn+1
Mathematik studieren; also alle und somit gilt A(n
+ 1).
Also gilt A(n )?
Aussagen und Mengen
Math4Inf
24 / 567
Denition 1.15 [Teilmenge].
i) Eine Menge B heiÿt Teilmenge einer Menge A (Schreibweise:
B
⊆ A),
wenn jedes Element von B auch Element von A ist,
d.h.,
B
⊆ A ⇔ ∀b ∈ B : b ∈ A.
ii) Zwei Mengen A und B heiÿen gleich (Schreibweise: B
⊆ A und
A 6= B .
falls B
man
A
⊆ B.
= A),
Sind A und B nicht gleich, so schreibt
iii) Eine Menge B heiÿt echte Teilmenge einer Menge A
(Schreibweise: B
⊂ A),
wenn B
⊆A
und B
6= A.
Bemerkung 1.16.
Die leere Menge ist Teilmenge einer jeden Menge.
Aussagen und Mengen
Math4Inf
25 / 567
Denition 1.17 [Durchschnitt, Vereinigung, Dierenz].
Seien A, B Mengen.
i)
A
∩ B = {x : x ∈ A ∧ x ∈ B }
heiÿt Durchschnitt von A und B . Ist A
∩ B = ∅,
so heiÿen A
und B disjunkt.
ii)
A
∪ B = {x : x ∈ A ∨ x ∈ B }
heiÿt Vereinigung von A und B .
iii)
A
\ B = {x : x ∈ A ∧ x ∈
/ B}
heiÿt Dierenz von A und B .
iv) Ist B
⊆ U,
so heiÿt die Dierenz U
\B
auch
Komplementärmenge von B in der Grundmenge U und wird
mit B bezeichnet.
Aussagen und Mengen
Math4Inf
26 / 567
Satz 1.18 [Verknüpfungsregeln für Mengen].
Seien A, B Teilmengen einer Grundmenge U , also A, B
⊆ U.
i) Kommutativität:
A
∩ B = B ∩ A,
A
∪ B = B ∪ A.
ii) Assoziativität:
(A ∩ B ) ∩ C = A ∩ (B ∩ C ),
(A ∪ B ) ∪ C = A ∪ (B ∪ C ).
iii) Distributivität:
A ∩(B ∪C )
= (A∩B )∪(A∩C ),
A ∪(B ∩C )
= (A∪B )∩(A∪C ).
iv) Idempotenz:
A
Aussagen und Mengen
∩ A = A,
A
∪ A = A.
Math4Inf
27 / 567
v) Absorption:
(A ∪ B ) ∩ A = A,
vi) Neutralität von
A
∩ ∅ = ∅,
∅
(A ∩ B ) ∪ A = A.
und U :
A
∪ ∅ = A,
A
∪ U = U,
A
∩ U = A.
vii) Komplementregeln:
A
∩ A = ∅,
A
∪ A = U,
A
= A.
viii) De Morgan'sche Regeln7 :
A
∪ B = A ∩ B,
7 Augustus De Morgan, 18061871
Aussagen und Mengen
A
∩ B = A ∪ B.
Math4Inf
28 / 567
Denition 1.19 [Boolesche Algebra ].
8
Eine Menge, in der drei Operationen, z.B.
(∩, ∪, −)
oder
(∧, ∨, −),
deniert sind, die den Eigenschaften i)-vii) aus Satz 1.18 genügen,
wird als Boolesche Algebra bezeichnet.
8 George Boole, 18151864
Aussagen und Mengen
Math4Inf
29 / 567
Denition 1.20 [Kartesisches Produkt ].
9
i) Das kartesische Produkt X
×Y
(Sprechweise: X kreuz Y )
zweier Mengen X,Y ist deniert als
× Y = {(x , y ) : x ∈ X ,
X
(x , y ) ∈ X × Y
y
heiÿt geordnetes Paar.
ii) Allgemein ist das kartesische Produkt X1
n-Mengen X1 , . . . , Xn deniert als
X1
∈ Y }.
× X2 × · · · × Xn
× X2 × · · · × Xn = {(x1 , x2 , . . . , xn ) : xi ∈ Xi ,
1
von
≤ i ≤ n}.
(x1 , x2 , . . . , xn ) ∈ X1 × X2 × · · · × Xn heiÿt geordnetes n-Tupel.
Für das kartesische Produk X × X × · · · × X (n-mal) schreibt
n
man auch X .
Bemerkung 1.21.
Für
(x1 , . . . , xn ), (x10 , . . . , xn0 ) ∈ X1 × · · · × Xn
0
Aussagen und Mengen
0
gilt
0
(x1 , . . . , xn ) = (x1 , . . . , xn ) ⇔ xi = xi ,
Math4Inf
1
≤ i ≤ n.
30 / 567
Denition 1.22 [Mächtigkeit endlicher Mengen].
Eine Menge A heiÿt endlich, wenn sie endlich viele Elemente
enthält. Die Anzahl der Elemente von A heiÿt Mächtigkeit von A
und wird mit |A| bezeichnet.
Bemerkung 1.23.
Seien A, B endliche Mengen. Dann gilt
i)
ii)
|A ∪ B | = |A| + |B | − |A ∩ B |,
|A × B | = |A| · |B |
Denition 1.24 [Potenzmenge].
Sei A Menge. Die Menge P (A)
= {X : X ⊆ A}
aller Teilmengen
von A heiÿt Potenzmenge von A.
Lemma 1.25.
Sei A eine endliche Menge. Dann gilt
|P (A)| = 2|A| .
Aussagen und Mengen
Math4Inf
31 / 567
Denition 2.1 [Relationen].
i) Eine binäre Relation R zwischen den beiden Mengen A1 und
A2 ist eine Teilmenge von A1
Für
(x , y ) ∈ R
× A2 ,
also R
⊆ A1 × A2 .
sagt man, x und y stehen in Relation R und
schreibt dafür auch xRy .
Im Falle A1
= A2 = A
heiÿt R Relation auf A.
ii) Eine n-stellige Relation auf den n-Mengen A1 , . . . , An ist eine
Teilmenge von A1
Relationen und Abbildungen
× A2 × · · · × An .
Math4Inf
32 / 567
Denition 2.2 [Verkettung (Komposition) von
Relationen].
Sei R eine Relation zwischen den beiden Mengen A1 , A2 , und sei S
eine Relation zwischen den Mengen A2 und A3 . Unter der
Verkettung (Komposition) S
◦R
von S nach R versteht man die
Relation zwischen A1 und A3 gegeben durch
S ◦R
= {(x , z ) ∈ A1 × A3 : ∃ y ∈ A2
mit
(x , y ) ∈ R
und
(y , z ) ∈ S }
Denition 2.3 [Inverse Relation].
Sei R
⊆ A1 × A2
R
eine binäre Relation. Dann heiÿt
−1
= {(y , x ) ∈ A2 × A1 : (x , y ) ∈ R }
die zu R inverse Relation.
Relationen und Abbildungen
Math4Inf
33 / 567
Bemerkung 2.4.
Seien A1 , A2 , A3 Mengen und R
R
Relationen und Abbildungen
= (R −1 )−1
und
⊆ A1 × A2 ,
S
⊆ A2 × A3 .
Dann gilt
(S ◦ R )−1 = R −1 ◦ S −1 .
Math4Inf
34 / 567
Denition 2.5 [Äquivalenzrelation].
i) Sei R eine Relation auf der Menge A.
a)
b)
c)
ii)
R heiÿt reexiv, falls für alle x ∈ A gilt: (x , x ) ∈ R,
R heiÿt symmetrisch, falls für alle (x , y ) ∈ R gilt: (y , x ) ∈ R,
R heiÿt transitiv, falls für alle (x , y ), (y , z ) ∈ R gilt: (x , z ) ∈ R.
Eine binäre Relation R auf A, die reexiv, symmetrisch und
transitiv ist, heiÿt Äquivalenzrelation auf A. In diesem Fall sagt
man für
(x , y ) ∈ R
auch x ist äquivalent zu y .
Denition 2.6 [Äquivalenzklasse].
Sei R eine Äquivalenzrelation auf A. Für x
∈A
heiÿt
[x ]R = {y ∈ A : (x , y ) ∈ R }
die Äquivalenzklasse von x bzgl. R .
Relationen und Abbildungen
Math4Inf
35 / 567
Satz 2.7.
Sei R eine Äquivalenzrelation auf A. Dann gilt:
i) A
=
ii) Für
x ∈A [x ]R ,
x , y ∈ A gilt
S
entweder [x ]R
= [y ]R
oder [x ]R
∩ [y ]R = ∅.
In Worten: A ist die Vereinigung seiner Äquivalenzklassen, und zwei
verschiedene Äquivalenzklassen sind disjunkt.
Satz 2.8.
Sei A eine nicht-leere Menge. Seien A1 , . . . , An
A
=
Sn
i =1 Ai
und Ai
∩ Aj = ∅
für i
6= j .
⊆ A, Ai 6= ∅, mit
⊆ A×A
Sei die Relation R
gegeben durch
R
= {(x , y ) : x
und y liegen in der derselben Teilmenge Ai }.
Dann ist R eine Äquivalenzrelation auf A mit den Äquivalenzklassen
Ai .
Relationen und Abbildungen
Math4Inf
36 / 567
Beispiel 2.9 [Restklassen].
Sei m
∈N
und sei Rm die Relation auf
Rm
•
= {(x , y ) ∈ Z × Z : x − y
Z
gegeben durch
ist durch m teilbar}.
Dann ist Rm eine Äquivalenzrelation, und
Z
ist die disjunkte
Vereinigung der paarweise verschiedenen Äquivalenzklassen
[0]R , [1]R , . . . , [m − 1]R
m
•
Für k
m
∈ { 0, . . . , m − 1}
m
.
besteht [k ]Rm aus allen Zahlen, die bei
Division durch m den Rest k lassen. Daher nennt man [k ]Rm
auch Restklasse, und man bezeichnet sie einfach mit [k ]m .
Relationen und Abbildungen
Math4Inf
37 / 567
Denition 2.10 [Totale, partielle, Ordnung(srelation)].
Sei R eine Relation auf der Menge A.
i) R heiÿt antisymmetrisch, falls für alle x , y
und
ii)
(y , x ) ∈ R
gilt: x
∈A
mit
(x , y ) ∈ R
= y.
Eine Relation R auf A, die reexiv, antisymmetrisch und
transitiv ist, heiÿt Ordnung(srelation) auf A.
iii) Ein Ordnung(srelation) R auf A mit der Eigenschaft
(x , y ) ∈ R
oder
(y , x ) ∈ R
für alle x , y
∈A
heiÿt totale
Ordnung. Andernfalls heiÿt R eine partielle Ordnung.
Beispiel 2.11.
• ≤
ist eine totale Ordnung auf
• ⊆
ist eine partielle Ordnung auf einer Menge von Mengen.
Relationen und Abbildungen
R.
Math4Inf
38 / 567
Denition 2.12 [Abbildung(Funktion)].
Eine Abbildung (Funktion) f von einer Menge X in eine Menge Y
ist eine Vorschrift, die jedem x
∈X
genau ein Element f (x )
∈Y
zuordnet. Man schreibt dafür:
f
:X →Y
mit x
7→ f (x ).
Man sagt: x wird auf f (x ) abgebildet, bzw. f (x ) ist das Bild
oder der Funktionswert von x .
Die Menge X heiÿt Denitionsbereich und die Menge Y heiÿt
Wertebereich der Abbildung f .
Denition 2.13 [Graph].
Sei f
:X →Y
mit x
7→ f (x )
eine Abbildung. Die Relation
Γf = {(x , f (x )) : x ∈ X } ⊆ X × Y
heiÿt der Graph der Abbildung.
Relationen und Abbildungen
Math4Inf
39 / 567
Denition 2.14 [Bildmenge, Urbildmenge].
Sei f
:X →Y
mit x
7→ f (x )
f (A)
−1
⊆X
⊆Y
heiÿt
(B ) = {x ∈ X : f (x ) ∈ B }
Urbildmenge von B . Für einelementige Mengen B , also B
y
∈ Y,
schreibt man auch einfach f
Relationen und Abbildungen
heiÿt
= {f (x ) : x ∈ A}
Bildmenge von A, und für B
f
eine Abbildung. Für A
= {y },
−1 (y ).
Math4Inf
40 / 567
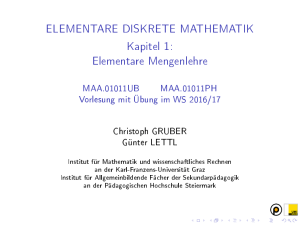
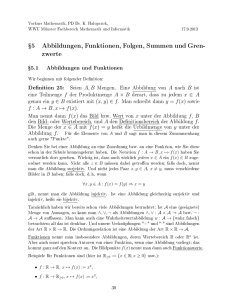
Beispiel 2.15.
:R→R
Sei f
•
mit x
7→ x 2 ,
d.h., f (x )
= x 2.
Denitions- und Wertebereich sind die reellen Zahlen.
Γf = {(x , x 2 ) : x ∈ R}.
8
6
4
2
–3
–2
–1
1
2
3
Abbildung: Der Graph Γf
x
•
f
(R) = R≥0 = {x ∈ R : x ≥ 0},
also die nicht-negativen
reellen Zahlen.
•
f
({0, −1, 1}) = {0, 1}
•
f
−1 ({−1})
Relationen und Abbildungen
und f
−1 ({2, 4})
√
= {± 2, ±2}.
= f −1 (−1) = ∅.
Math4Inf
41 / 567
Denition 2.16 [Injektiv, surjektiv, bijektiv].
Sei f
:X →Y
eine Abbildung.
i) f heiÿt injektiv, wenn
∀x1 , x2 ∈ X : x1 6= x2 ⇒ f (x1 ) 6= f (x2 ),
d.h., verschiedene Elemente aus X werden auf verschiedene
Elemente in Y abgebildet.
ii) f heiÿt surjektiv, wenn
f (X )
= Y,
d.h., jedes Element aus Y ist das Bild eines Elementes aus X .
iii) f heiÿt bijektiv, oder eins-zu-eins Abbildung bzw. eineindeutige
Abbildung, wenn f injektiv und surjektiv ist.
Relationen und Abbildungen
Math4Inf
41 / 567
Beispiel 2.17.
•
•
: R → R mit f (x ) = x 2 .
f (1) = f (−1), noch surjektiv,
Sei f
Sei f
: R → R≥ 0
mit f (x )
=x
f ist weder injektiv, da
da f
2
(R) = R≥0 6= R.
. Dann ist f surjektiv, aber
immer noch nicht injektiv.
•
Sei f
: R≥ 0 → R≥ 0
Relationen und Abbildungen
mit f (x )
= x 2.
Dann ist f bijektiv.
Math4Inf
42 / 567
Denition 2.18 [Verkettung (Komposition) von
Abbildungen].
Seien f
:X →Y
und g
: X0 → Y0
Abbildungen mit f (X )
⊆ X 0.
Die Verkettung (Komposition) von g nach f ist die Abbildung
g
◦f : X → Y0
•
mit x
7→ (g ◦ f )(x ) = g (f (x )).
Die Verkettung von Abbildungen entspricht der Verkettung
von Relationen:
Relationen und Abbildungen
Γg ◦f = Γg ◦ Γf .
Math4Inf
43 / 567
Lemma 2.19.
Seien f
:X →Y
und g
:Y →Z
Abbildungen.
i) Sind f und g injektiv, dann auch g
◦ f : X → Z.
ii) Sind f und g surjektiv, dann auch g
iii) Sind f und g bijektiv, dann auch g
Lemma 2.20.
: X → Y , g : Y 0 → Z und
0
0
0
f (X ) ⊆ Y und g (Y ) ⊆ Z . Dann
Seien f
h
◦ f : X → Z.
◦ f : X → Z.
: Z0 → W
Abbildungen mit
gilt
(h ◦ g ) ◦ f = h ◦ (g ◦ f ),
d.h. die Komposition von Abbildungen ist assoziativ.
Relationen und Abbildungen
Math4Inf
44 / 567
Denition 2.21 [Identische Abbildung].
Sei X Menge. Die Abbildung idX
:X →X
mit x
7→ x
heiÿt
identische Abbildung auf X .
Denition 2.22 [Inverse Abbildung].
:X →Y
Sei f
y
∈Y
: Y → X , die jedem
mit y = f (x ) zuordnet,
bijektiv. Die Abbildung g
das eindeutig bestimmte x
∈X
heiÿt inverse Abbildung, und man schreibt für g auch f
•
−1 .
Die inverse Abbildung entspricht der inversen Relation:
1
Γf −1 = Γ−
f .
Lemma 2.23.
Sei f
:X →Y
i) f
ii) f
Sei g
−1
bijektiv. Dann gilt:
◦ f = idX ,
d.h.
(f −1 ◦ f )(x ) = x ,
für alle x
∈ X,
◦ f −1 = idY ,
d.h.
(f ◦ f −1 )(y ) = y ,
für alle y
∈ Y.
:Y →Z
eine weitere bijektive Abbildung. Für die
Umkehrfunktion von g
Relationen und Abbildungen
◦f :X →Z
gilt:
(g ◦ f )−1 = f −1 ◦ g −1 .
Math4Inf
45 / 567
Denition 2.24 [Gleichmächtigkeit von Mengen].
Zwei Mengen A, B heiÿen gleichmächtig oder von gleicher
Kardinalität wenn es eine bijektive Abbildung von A nach B (und
somit auch von B nach A) gibt. Man schreibt dann auch |A|
= |B |.
Beispiel 2.25.
•
Zwei endliche Mengen A, B mit |A|
= |B |
sind stets
gleichmächtig.
• N
und
N0 = N ∪ {0}
• N
und
Z
•
sind gleichmächtig.
sind gleichmächtig.
Man kann auch zeigen, dass
R
und
{x ∈ R : 0 < x < 1}
gleichmächtig sind.
Relationen und Abbildungen
Math4Inf
46 / 567
Denition 2.26 [Abzählbarkeit, Überabzählbarkeit].
Sei M eine unendliche Menge.
i) M heiÿt abzählbar unendlich oder kurz abzählbar wenn es eine
bijektive Abbildung von
gleicher Mächtigkeit
N nach
wie N.
M gibt, d.h. M ist von
ii) Ist M nicht abzählbar unendlich, dann heiÿt M überabzählbar
unendlich oder kurz überabzählbar.
Satz 2.27.
i)
Q
ist abzählbar.
ii)
R
ist überabzählbar.
iii) Die Vereinigung von abzählbar vielen abzählbaren Mengen ist
abzählbar.
Relationen und Abbildungen
Math4Inf
47 / 567
Denition 3.1 [Permutationen].
Für n
∈N
sei
Sn
= {σ : {1, . . . , n} → {1, . . . , n} : σ
die Menge aller bijektiven Abbildungen von
selbst.
σ ∈ Sn
bijektiv
{1 , . . . , n }
}
auf sich
heiÿt Permutation.
Denition 3.2 [Fakultät].
Für n
∈N
heiÿt
n!
=
n
Y
i
= 1 · 2 · 3 · . . . · (n − 1) · n
i =1
Fakultät (sprich: n-Fakultät). Man vereinbart zudem 0!
Elementares Zählen und komplexe Zahlen
Math4Inf
= 1.
48 / 567
Lemma 3.3.
Für n
∈N
ist |Sn |
= n !.
Bemerkung 3.4 [Stirling -Formel].
10
n!
≈
√
2π n
n n
e
,
d.h. für groÿe n entspricht n ! etwa dem Ausdruck auf der rechten
Seite.
10 James Stirling, 16921770
Elementares Zählen und komplexe Zahlen
Math4Inf
49 / 567
Bemerkung 3.5.
Die Fakultätsfunktion g
: N0 → N
mit g (n )
= n!
lässt sich auch
rekursiv denieren:
(
g (n )
=
1,
= 0,
n · g (n − 1), n ≥ 1.
n
Satz 3.6 [Rekursionssatz ].
11
Es sei z0
∈ Z, Z≥z0 = {z ∈ Z : z ≥ z0 } und M eine beliebige, nicht
: Z≥z0 × M → M eine Abbildung und
leere Menge. Weiter sei f
m
∈ M.
Dann liefert die folgende rekursive Vorschrift eine
: Z≥z0 → M .
(
m,
g (n ) =
f (n , g (n − 1)),
eindeutige Abbildung g
11 Richard Dedekind, 18311916
Elementares Zählen und komplexe Zahlen
= z0 ,
n ≥ z0 + 1.
n
Math4Inf
50 / 567
Beispiel 3.7.
•
Sei z0
=0
und f
: Z≥0 × N0 → N0
mit f (n , m )
= n + m.
Dann ist
(
g (n )
•
= 0,
f (n , g (n − 1)), n ≥ 1,
n
X
(n + 1) n
i =
=
.
2
i =0
=
0,
(Verallgemeinerung) Fibonacci
n
12
-Zahlen: Sei F
0,
F (n ) =
1,
F (n − 1) + F (n − 2),
12 Leonardo Pisano, 1170(80)-1250
Elementares Zählen und komplexe Zahlen
Math4Inf
: N0 → N0
mit
= 0,
n = 1,
n ≥ 2.
n
51 / 567
Bemerkung 3.8.
•
Sei a
= (1 +
√
√
= (√
1−
5)/2.
n
n
F (n ) = (1/ 5)(a − b ).
5)/2 (goldener Schnitt) und b
Für die n-te Fibonacci-Zahl F (n ) gilt
•
Think recursively!
•
Türme von Hanoi, siehe
http: // en. wikipedia. org/ wiki/ Tower_ of_ Hanoi
Elementares Zählen und komplexe Zahlen
Math4Inf
52 / 567
Denition 3.9 [Binomialkoezient].
Für n
∈ N0
und k
Zudem vereinbart
man n über k.
∈ {0, . . . , n} heiÿt
n
n!
=
k
k !(n − k )!
n
man
k = 0 falls k < 0 oder
k
> n. kn
liest
Satz 3.10.
i)
ii)
n
n−1
n −1 k = k + k −1
n
n
k = n −k .
für n
≥ 1.
Satz 3.11.
Die Anzahl der k -elementigen Teilmengen einer n-elementigen
Menge beträgt
n .
k
Elementares Zählen und komplexe Zahlen
Math4Inf
53 / 567
Beispiel 3.12.
•
•
4
0
= 1,
Sei M
4
1
= 4,
4
2
= 6,
4
3
= 2,
4
4
= 1.
= {1, 2, 3, 4}.
0-elem. Teilmengen:
1-elem. Teilmengen:
2-elem. Teilmengen:
3-elem. Teilmengen:
4-elem. Teilmengen:
Elementares Zählen und komplexe Zahlen
∅
{1}, {2}, {3}, {4}
{1, 2}, {1, 3}, {1, 4}, {2, 3}, {2, 4}, {3, 4}
{2, 3, 4}, {1, 3, 4}, {1, 2, 4}, {1, 2, 3}
{1, 2, 3, 4}
Math4Inf
54 / 567
Satz 3.13 [Binomischer Lehrsatz].
Für n
∈ N0
und x , y
∈R
gilt:
(x + y )n =
n X
n
k =0
k
x
n −k y k .
Korollar 3.14.
n X
n
k =0
Elementares Zählen und komplexe Zahlen
k
= 2n .
Math4Inf
55 / 567
Denition 3.15 [Primzahl].
Eine natürliche Zahl p
>1
heiÿt Primzahl, wenn sie nur durch sich
selbst und 1 teilbar ist. Die Menge aller Primzahlen wird mit
P
bezeichnet.
Satz 3.16 [Primfaktorzerlegung].
Jede natürliche Zahl gröÿer als 1 lässt sich eindeutig (bis auf die
Reihenfolge) als Produkt von Primzahlen schreiben.
Satz 3.17 [Euklid ].
13
Es gibt unendlich viele Primzahlen.
Bemerkung 3.18.
Der Primzahlsatz
14
sagt aus, dass
|{p ∈ P : p ≤ n}| ≈
n
ln n
.
13 Euklid, ca. 300 v.Chr.
14 Jacques Hadamard, 1865 1963; Charles de la Vallée Poussin, 18661962
Elementares Zählen und komplexe Zahlen
Math4Inf
56 / 567
Notation 3.19.
Für Zahlen a, b
d.h. falls es ein
∈ Z schreibt man a|b, falls
m ∈ Z gibt mit b = m · a.
Bemerkung 3.20.
Für p
∈P
und k
∈ { 1, . . . , p − 1}
Denition 3.21 [ggT].
Für a, b
∈ Z,
a
6= 0,
a ein Teiler von b ist,
p
k .
ist p heiÿt die gröÿte natürliche Zahl n
∈N
mit n |a
und n |b der gröÿte gemeinsame Teiler von a und b. Er wird mit
ggT(a, b ) bezeichnet.
Lemma 3.22.
Seien a, b
∈Z
i) ggT(a, b )
und m
∈ N.
= ggT(b, a) = ggT(−a, b) = ggT(a, −b) =
ggT(−a, −b ).
ii) ggT(a, b )
= ggT(a ± m · b, b) = ggT(a, b ± m · a).
Elementares Zählen und komplexe Zahlen
Math4Inf
57 / 567
Lemma 3.23 [Division mit Rest].
∈ Z und b ∈ N. Dann
∈ {0, . . . , b − 1} mit
Sei a
r
a
gibt es eindeutige q
∈Z
und
= q · b + r.
r heiÿt der Rest von a bei Division durch b und wird mit a mod b
bezeichnet (gesprochen a modulo b oder einfach a mod b).
•
Insbesondere gilt ggT(a, b )
Elementares Zählen und komplexe Zahlen
= ggT(a mod b, b).
Math4Inf
58 / 567
Satz 3.24 [Euklidischer Algorithmus].
∈N
Seien a, b
und sei a
≥ b.
Das folgende Verfahren, der
sogenannte Euklidische Algorithmus, berechnet (rekursiv)
ggT(a, b ).
(1) Berechne r
(2) Ist r
= 0,
=a
mod b.
dann ggT(a, b )
=b
(3) Rufe das Verfahren auf für a
und STOP.
=b
und b
= r,
d.h. berechne
ggT(b , a mod b ).
Elementares Zählen und komplexe Zahlen
Math4Inf
59 / 567
Beispiel 3.25.
Berechnen von ggT(29393, 2805).
Aufruf von ggT(a, b )
r
= a mod b
ggT(29393, 2805)
1343
ggT(2805, 1343)
119
ggT(1343, 119)
34
ggT(119, 34)
17
ggT(34, 17)
0
= 10 · 2805 + 1343
(3.1)
2805
= 2 · 1343 + 119
(3.2)
1343
= 11 · 119 + 34
(3.3)
= 3 · 34 + 17
(3.4)
29393
119
34
ggT(29393, 2805)
= 2 · 17 + 0
= 17
Elementares Zählen und komplexe Zahlen
Math4Inf
60 / 567
Lemma 3.26 [Lemma von Bézout ].
15
Seien a, b
∈ Z.
Dann gibt es x , y
ggT(a, b )
∈ Z,
so dass
= x · a + y · b.
Bemerkung 3.27.
Diese Zahlen x , y lassen sich leicht aus dem Euklidischen
Algorithmus berechnen, wenn man in jedem Schritt bei der
Berechnung von r
a
=m·b+r
= a mod b
auch die Zahl m
∈N
mit
abspeichert.
15 Étienne Bézout; 1730 1783
Elementares Zählen und komplexe Zahlen
Math4Inf
61 / 567
Beispiel 3.28 [ggT(29393, 2805) (fortgesetzt)].
Aus (3.4) folgt
17
= 119 − 3 · 34.
Mit (3.3) erhält man
17
= 119 − 3 · (1343 − 11 · 119) = 34 · 119 − 3 · 1343.
Mit (3.2) erhält man
17
= 34 · (2805 − 2 · 1343) − 3 · 1343 = 34 · 2805 − 71 · 1343.
Und abschlieÿend mit (3.1)
17
= 34 ∗ 2805 − 71 · (29393 − 10 · 2805) = −71 · 29393 + 744 · 2805.
Elementares Zählen und komplexe Zahlen
Math4Inf
62 / 567
Denition 3.29 [Kongruente Zahlen].
Seien a, b
∈Z
und m
∈ N.
a und b heiÿen kongruent modulo m,
falls sie bei Division durch m den gleichen Rest lassen, d.h. falls
a mod m
=b
mod m. Man schreibt dafür a
≡b
mod m,
gesprochen a kongruent b mod(ulo) m.
•
Mit der Notation aus Beispiel 2.9 gilt also: a
≡b
mod m genau
dann, wenn a, b in der gleichen Restklasse Rm enthalten sind.
Satz 3.30.
Sei a
≡b
mod m und c
a
mod m. Dann gilt
+ c ≡ (b + d ) mod m,
a
Elementares Zählen und komplexe Zahlen
≡d
· c ≡ (b · d ) mod m.
Math4Inf
63 / 567
Notation 3.31.
Sei m
∈ N,
m
≥ 2.
i) Sei
Zm = {[0]m , [1]m , . . . , [m − 1]m }
die Menge der Restklassen bei Division durch m (siehe Beispiel
2.9).
Zm wird nun eine Addition ⊕
wie folgt deniert:
ii) Auf der Menge
Multiplikation
[a]m ⊕ [b]m = [a + b]m
und [a]m
und
[b]m = [a · b]m
Bemerkung 3.32.
Aufgrund von Satz 3.30 sind
[c ]m = [a]m , [d ]m = [b]m
⊕
wohldeniert, d.h. für
gilt
[a]m ⊕ [b]m = [c ]m ⊕ [d ]m
Elementares Zählen und komplexe Zahlen
und
und [a]m
[b]m = [c ]m [d ]m .
Math4Inf
64 / 567
Beispiel 3.33 [Verknüpfungstafeln für m = 4].
⊕
[0]4
[1]4
[2]4
[3]4
[0]4
[0]4
[1]4
[2]4
[3]4
[1]4
[1]4
[2]4
[3]4
[0]4
[2]4
[2]4
[3]4
[0]4
[1]4
[3]4
[3]4
[0]4
[1]4
[2]4
[0]4
[1]4
[2]4
[3]4
[0]4
[0]4
[0]4
[0]4
[0]4
[1]4
[0]4
[1]4
[2]4
[3]4
[2]4
[0]4
[2]4
[0]4
[2]4
[3]4
[0]4
[3]4
[2]4
[1]4
Elementares Zählen und komplexe Zahlen
Math4Inf
65 / 567
Beispiel 3.34 [Verknüpfungstafeln für m = 5].
⊕
[0]5
[1]5
[2]5
[3]5
[4]5
[0]5
[0]5
[1]5
[2]5
[3]5
[4]5
[1]5
[1]5
[2]5
[3]5
[4]5
[0]5
[2]5
[2]5
[3]5
[4]5
[0]5
[1]5
[3]5
[3]5
[4]5
[0]5
[1]5
[2]5
[4]5
[4]5
[0]5
[1]5
[2]5
[3]5
[0]5
[1]5
[2]5
[3]5
[4]5
[0]5
[0]5
[0]5
[0]5
[0]5
[0]5
[1]5
[0]5
[1]5
[2]5
[3]5
[4]5
[2]5
[0]5
[2]5
[4]5
[1]5
[3]5
[3]5
[0]5
[3]5
[1]5
[4]5
[2]5
[4]5
[0]5
[4]5
[3]5
[2]5
[1]5
Elementares Zählen und komplexe Zahlen
Math4Inf
66 / 567
Bemerkung 3.35.
i) Sowohl bei
(Z4 , ⊕)
als auch bei
(Z5 , ⊕)
gilt
[a]m ⊕ [0]m = [a]m ,
und für jedes [a]m
∈ Zm
existiert ein [a
0]
m ∈ Zm
mit
[a]m ⊕ [a0 ]m = [0]m .
ii) Für
(Z4 , )
und
(Z5 , )
gilt analog
[a]m [1]m = [a]m ,
Z4 mit [2]4 · [a0 ]4 = [1]4 .
jedes [a]m ∈ Zm \ {[0]m } ein
aber für [2]4 gibt es kein Element in
Für m = 5 gibt
[a0 ]m ∈ Zm mit
es hingegen für
Elementares Zählen und komplexe Zahlen
[a]m [a0 ]m = [1]m .
Math4Inf
67 / 567
Denition 3.36 [Gruppe].
⊗:G ×G →G
Sei G eine nichtleere Menge, und sei
(x , y ) 7→ x ⊗ y eine Abbildung
(G , ⊗) heiÿt Gruppe, wenn die
mit
(Verknüpfung).
folgenden Bedingungen 1.3. erfüllt
sind:
1. Für alle x , y , z
∈G
gilt:
(x ⊗ y ) ⊗ z = x ⊗ (y ⊗ z )
(Assoziativgesetz).
2. Es gibt ein neutrales Element e
gilt: e
3. Zu jedem x
x
•
⊗
∈ G,
so dass für alle x
∈G
⊗ x = x ⊗ e = x.
0
x
=
0
x
∈ G gibt es ein inverses Element x 0 ∈ G , so
⊗ x = e . x 0 wird auch mit x −1 bezeichnet.
Gilt zusätzlich x
(G , ⊗)
⊗y =y ⊗x
für alle x , y
16
kommutative (abelsche
16 Niels Abel, 18021829
Elementares Zählen und komplexe Zahlen
∈ G,
dass
dann heiÿt
) Gruppe.
Math4Inf
68 / 567
Beispiel 3.37.
• (Z, +) ist kommutative Gruppe mit neutralem Element
für a ∈ Z ist −a das inverse Element. Ebenso sind
(Q, +), (R, +) kommutative Gruppen.
0, und
• (Q \ {0}, ·) ist kommutative Gruppe mit neutralem Element
und für a ∈ Q \ {0} ist 1/a das inverse Element. Ebenso ist
(R \ {0}, ·) kommutative Gruppe.
• (Sn , ◦)
1,
ist Gruppe mit neutralem Element id{1,...,n} , und das
inverse Element von
σ ∈ Sn
ist durch die Umkehrabbildung
gegeben. Sn ist nicht kommutativ für n
• (Zm , ⊕)
≥ 3.
ist kommutative Gruppe mit neutralem Element [0]m ,
und für [a]m
∈ Zm
• (Z4 \ {0}, )
ist
[−a]m = [m − a]m
ist keine Gruppe, aber
das inverse Element.
(Z5 \ {0}, )
ist
kommutative Gruppe.
Elementares Zählen und komplexe Zahlen
Math4Inf
69 / 567
Denition 3.38 [Körper].
K eine nichtleere Mengen, und seien +, · : K × K → K mit
(x , y ) 7→ x + y (Addition), bzw. (x , y ) 7→ x · y (Multiplikation)
Abbildungen. (K, +, ·) heiÿt Körper, wenn die folgenden
Sei
Bedingungen 1.3. erfüllt sind:
1.
(K, +)
ist kommutative Gruppe.
Das neutrale Element von
2.
(K \ {0}, ·)
(K, +)
wird mit 0 bezeichnet.
ist kommutative Gruppe.
Das neutrale Element von
(K \ {0}, ·)
wird mit 1 bezeichnet
und Einselement genannt.
3. Für alle x , y , z
∈K
gilt: x
· y + x · z = x · (y + z )
(Distributivgesetz).
Beispiel 3.39.
• (Q, +, ·), (R, +, ·)
• (Z, +, ·)
sind Körper.
ist kein Körper.
Elementares Zählen und komplexe Zahlen
Math4Inf
70 / 567
Satz 3.40.
(Zm , ⊕, )
ist genau dann ein Körper, wenn m Primzahl ist.
Elementares Zählen und komplexe Zahlen
Math4Inf
71 / 567
Denition 3.41 [Komplexe Zahlen].
Die Menge
C = {x + y · i : x , y ∈ R}
heiÿt Menge der komplexen Zahlen. Dabei ist i
i
2
∈C
deniert durch
= i · i = −1
und heiÿt imaginäre Einheit.
Für z
=x +y · i∈C
heiÿt x Realteil von z und wird mit Re(z )
bezeichnet. y heiÿt Imaginärteil von z und wird mit Im(z )
bezeichnet.
= x + y i und z 0 = x 0 + y 0 i
0
0
dann, wenn x = x und y = y .
Zwei komplexe Zahlen z
d.h. z
=
0
z , genau
Elementares Zählen und komplexe Zahlen
Math4Inf
sind gleich,
72 / 567
•
•
Es ist
N ⊂ Z ⊂ Q ⊂ R ⊂ C.
Betrachtet man die imaginäre Einheit als eine Variable mit der
Eigenschaft i
2
= −1,
dann ergeben sich Addition und
Multiplikation von komplexen Zahlen unmittelbar aus den
entsprechenden Operationen für reelle Zahlen.
Seien z
z
= x + y i, z 0 = x 0 + y 0 i ∈ C :
+ z 0 = (x + y i) + (x 0 + y 0 i)
= (x + x 0 ) + (y + y 0) i.
z
· z 0 = (x + y i) · (x 0 + y 0 i) = x · x 0 + x · y 0 i + y i · x 0 + y i · y 0 i
= x x 0 + y y 0 i2 + x y 0 i + y x 0 i
= x x 0 − y y 0 + (x y 0 + y x 0 ) i.
•
Weiterhin ist für z
z
−1
Elementares Zählen und komplexe Zahlen
=
= x + y i 6= 0 (= 0 + 0 i)
1
x
+yi
=
x
x
2
+y
2
−
y
x
2
Math4Inf
+ y2
i.
73 / 567
Satz 3.42.
(C, +, ·)
ist ein Körper mit neutralem Element 0
Einselement 1
(= 0 + 0 i)
und
(= 1 + 0 i).
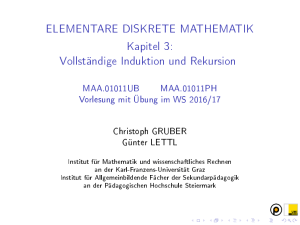
Notation 3.43 [Gauÿsche Zahlenebene].
17
Im(
z + z0
x
z
0
z)
z
y
0
y
0
x
Re(
z)
Abbildung: Addition von komplexen Zahlen in der Gauÿsche Zahlenebene
17 Carl Friedrich Gauÿ (Gauss) 17771855
Elementares Zählen und komplexe Zahlen
Math4Inf
74 / 567
Denition 3.44 [Konjugierte Zahl, Betrag].
Sei z
= x + y i ∈ C.
=x −yi∈C
p
|z | = x 2 + y 2
i) z
ii)
heiÿt die zu z konjugierte (komplexe) Zahl.
heiÿt der Betrag der komplexen Zahl z .
Satz 3.45.
Seien z , z
i) z
ii) z
iii)
+
0
z0
=z
∈ C.
= z + z0
und z
· z 0 = z · z 0.
genau dann, wenn z
∈ R.
2
|z | = z · z .
iv) z −1
= z /|z |2 ,
z
Elementares Zählen und komplexe Zahlen
6= 0.
Math4Inf
75 / 567
Im(z )
z
y
|z |
Re(z )
x
−y
z
Abbildung: Konjugierte komplexe Zahl und Betrag von komplexen Zahlen
in der Gauÿsche Zahlenebene
Elementares Zählen und komplexe Zahlen
Math4Inf
76 / 567
Denition 3.46 [Polardarstellung].
= x + y i ∈ C,
Jede komplexe Zahl z
6= 0,
z
lässt sich eindeutig in
der Form
= r (cos φ +
z
= |z |,
darstellen. Dabei ist r
und
φ
i sin φ)
(3.5)
ist der Winkel zwischen z und
der reellen Achse, also
cos φ
=
x
|z |
und sin φ
=
y
|z |
(r , φ)
(3.5) heiÿt Polardarstellung von z , und
.
nennt man
Polarkoordinaten von z .
Bemerkung 3.47.
Für z
= r (cos φ +
i sin φ), z 0
= r 0 (cos φ0 +
i sin φ0 )
∈C
ist (siehe
Bemerkung 0.4).
z
· z 0 = r (cos φ +
=rr
Elementares Zählen und komplexe Zahlen
0
0
0
i sin φ) · r (cos φ
+
0
i sin φ
)
0
0
cos(φ + φ ) + i sin(φ + φ ) .
Math4Inf
77 / 567
Im(z )
z
z0
r
r0
φ + φ0
φ0
φ
Re(z )
r ·r
0
z · z0
Abbildung: Multiplikation von komplexen Zahlen in Polardarstellung
Elementares Zählen und komplexe Zahlen
Math4Inf
78 / 567
Lemma 3.48 [Formel von Moivre ].
18
Für z
= r (cos φ +
z
i sin φ) und n
∈N
gilt:
n = r n (cos(n · φ) +
i sin(n
· φ)).
Denition 3.49 [Einheitswurzeln].
Für n
∈N
heiÿen
ωkn = cos
2k
π
n
+
i sin
2k
n
π
,
k
= 0, . . . , n − 1,
n-te Einheitswurzeln.
•
Es ist
(ωkn )n = 1
für k
= 0, . . . , n − 1.
18 Abraham de Moivre, 16671754
Elementares Zählen und komplexe Zahlen
Math4Inf
79 / 567
Beispiel 3.50.
•
n
= 1: ω01 = 1.
•
n
= 2: ω02 = 1, ω12 = −1.
•
n
= 3: ω03 = 1, ω13 = − 12 +
•
n
4
0
4
1
= 4: ω = 1, ω =
Bemerkung 3.51.
Die n-ten Einheitswurzeln
i,
4
2
√
3
2
i,
ω23 = − 12 −
√
3
2
i.
4
3
ω = −1, ω = − i.
{ωkn : k = 0, . . . , n − 1}
bilden mit der
Multiplikation eine Gruppe.
Elementares Zählen und komplexe Zahlen
Math4Inf
80 / 567
Bemerkung 3.52.
Sei z
= r (cos φ + i sin φ) ∈ C und n ∈ N.
√
φ
φ
+ i sin
r
cos
· ωkn ,
wk =
n
n
gilt
(wk )n = z .
wk , k
Notation 3.53.
Sei z
= r (cos φ +
√
Zeichen
n
= 0, . . . , n − 1,
Für
k
= 0, . . . , n − 1,
sind die n-ten Wurzeln von z .
i sin φ). Als (Quadrat)-Wurzel von z , im
z , versteht man
√
z
=
√
r
cos
φ
2
+
i sin
φ
2
.
Beispiel 3.54.
•
•
√
−1 =
Für x
i,
√
∈ R,
i
x
=
√1
≤ 0,
Elementares Zählen und komplexe Zahlen
+ √12 i.
p
√
ist
x =
|x | i.
2
Math4Inf
81 / 567
Satz 3.55 [Fundamentalsatz der Algebra].
Jede Polynomfunktion f
mit an
der Form
f (z )
= an z n + an − 1 z n − 1 + . . . + a1 z + a0 ,
6= 0
besitzt eine Darstellung
f (z )
mit ci
:C→C
∈ C,
1
ai
∈ C,
= an (z − c1 ) · (z − c2 ) · . . . · (z − cn ),
≤ i ≤ n.
Elementares Zählen und komplexe Zahlen
Math4Inf
82 / 567
Beispiel 3.56.
•
= z 2 + a1 z + a0 . Mit
r a1 2
a1
=− +
− a0 ,
Sei f (z )
c1
ist f (z )
2
2
c2
=−
a1
2
−
r
a1
2
2
− a0
= (z − c1 )(z − c2 ).
+ 1 = (z − i)(z + i), z 4 − 1 = (z − 1)(z − i)(z + 1)(z + i).
Q 1
n
• z n − 1 = nk −
=0 (z − ωk ).
•
z
2
Elementares Zählen und komplexe Zahlen
Math4Inf
83 / 567
Satz 3.57.
: C → C mit f (x ) = an x n + an−1 x n−1 + . . . + a1 x + a0 ,
wobei ai ∈ R und an 6= 0.
• Ist z ∈ C mit f (z ) = 0, dann ist auch f (z ) = 0.
Sei f
•
Ist n ungerade, dann gibt es ein x
Elementares Zählen und komplexe Zahlen
?
∈R
mit f (x
Math4Inf
?)
= 0.
84 / 567
Notation 4.1.
(K, +, ·) ein Körper
von K heiÿen Skalare.
Im Folgenden sei
Die Elemente
(z.B.
Q, R, C, Z2 , Z3 ,
etc.).
Denition 4.2 [Lineares Gleichungssystem].
Ein lineares Gleichungssystem (über dem Körper
K)
aus m
Gleichungen mit n Unbekannten x1 , . . . , xn hat die Form
a1 1 x1
+ a1 2 x2 + · · · + a1 n xn = b1
a2 1 x1
+ a2 2 x2 + · · · + a2 n xn = b2
.
.
.
.
.
.
am 1 x1
≤ i ≤ m,
L
aus
K.
.
= ..
(4.1)
+ am 2 x2 + · · · + am n xn = bm .
Dabei sind alle Koezienten ai j , 1
1
.
.
.
≤ i ≤ m,
1
≤ j ≤ n,
und bi ,
Die Menge
= {(x1 , . . . , xn ) ∈ Kn : x1 , . . . , xn
heiÿt Lösungsmenge des Gleichungssystems.
Lineare Gleichungssysteme und Matrizen
erfüllen (4.1)}
Math4Inf
85 / 567
Beispiel 4.3.
•
Das lineare Gleichungssystem über
Q
2 x1
+ 3 x2 = 0
2 x1
+ 3 x2 = 1
besitzt keine Lösung.
•
Das lineare Gleichungssystem über
x1
+ x2 = 0
x1
− x2 = 0
besitzt genau eine Lösung
Lineare Gleichungssysteme und Matrizen
R
(x1 , x2 ) = (0, 0).
Math4Inf
86 / 567
•
Das lineare Gleichungssystem über
x1
x1
2 x1
+
+
+
2 x2
2 x2
+
2 x3
4 x2
3 x3
R
+
+
+
+
x4
3 x4
3 x4
2 x4
=
=
=
=
1
5
5
3
(x1 , x2 , x3 , x4 ) = (−2, 0, −1, 3)
(x1 , x2 , x3 , x4 ) = (0, −1, −1, 3).
besitzt etwa die Lösung
Lineare Gleichungssysteme und Matrizen
Math4Inf
oder
87 / 567
Lemma 4.4.
Die Lösungsmenge eines linearen Gleichungssystems über
K
(4.1)
ändert sich nicht, wenn man
i) zwei Gleichungen vertauscht,
ii) das
λ-fache
einer Gleichung zu einer anderen addiert,
iii) eine Gleichung mit
•
λ ∈ K \ { 0}
λ ∈ K,
multipliziert.
Der Gauÿ'sche Algorithmus (auch Gauÿ'sches
Eliminationsverfahren genannt) benutzt die Regeln aus Lemma
4.4 sukzessive, um ein gegebenes lineares Gleichungssystem in
ein anderes zu überführen, bei dem man die Lösungsmnenge
direkt ablesen kann.
Lineare Gleichungssysteme und Matrizen
Math4Inf
88 / 567
Beispiel 4.5.
•
Gegeben sei folgendes Gleichungssystem über
x1
+ 2 x2
+
x1
+ 2 x2 + 2 x3
+3 x4 = 5
+ 4 x2
+3 x4 = 5
2 x1
3 x3
•
R
x4
=1
+ 2 x4 = 3
(−1)-fachen der 1.ten Gleichung zur 2.ten
und des (−2)-fachen der 1.ten Gleichung zur
Addition des
Gleichung,
3.ten
führt zu
x1
+ 2 x2
+
2 x3
x4
+ 2 x4 = 4
x4
3 x3
Lineare Gleichungssysteme und Matrizen
=1
=3
+ 2 x4 = 3
Math4Inf
89 / 567
•
Addition des
(−3/2)-fachen
der 2.ten Gleichung zur 4.ten
Gleichung führt zu
x1
+ 2 x2
+
2 x3
x4
=1
+ 2 x4 = 4
x4
=3
−x4 = −3
•
Addition der 3.ten Gleichung zur 4.ten Gleichung führt zu
x1
+ 2 x2
+
2 x3
Lineare Gleichungssysteme und Matrizen
x4
=1
+ 2 x4 = 4
x4
=3
0
=0
Math4Inf
90 / 567
Hieraus lassen sich die Lösungen sofort ablesen:
•
Die 3.te Gleichung besagt x4
•
Diesen Wert von x4 eingesetzt in die 2.te Gleichung ergibt
x3
•
= −1.
Setzt man nun die Werte für x3 und x4 in die 1.te Gleichung
ein, so erhält man x1
•
= 3.
+ 2 x2 = −2.
Also ist
L
= {(x1 , x2 , −1, 3) : x1 + 2 x2 = −2}
= {(−2 − 2 x2 , x2 , −1, 3) : x2 ∈ R}.
Lineare Gleichungssysteme und Matrizen
Math4Inf
91 / 567
Denition 4.6 [Matrix].
•
Eine Anordnung von Skalaren ai
j ∈K
in m Zeilen und n
Spalten der Form
A
a1 n
.
.
.
..
.
.
.
am 2
···
am n
oder
(m, n)-Matrix
a1 2
a2 1
= .
..
a2 2
am 1
wird m
···
···
a1 1
× n-Matrix
.
a2 n
,
kurz A
,n
= (ai j )m
i ,j = 1
genannt. ai
j
oder A
= (ai j ),
heiÿen die
Elemente oder Koezienten der Matrix. Der erste Index, i ,
gibt die Zeilennummer (Zeilenindex), der zweite die
Spaltennummer (den Spaltenindex) an, in der ai
•
Die Menge aller m
mit
•
Km×n
× n-Matrizen
j
steht.
mit Koezienten aus
K
wird
bezeichnet.
Sind alle Koezienten von A gleich 0, dann heiÿt A Nullmatrix
und wird mit
0
Lineare Gleichungssysteme und Matrizen
bezeichnet.
Math4Inf
92 / 567
Denition 4.7 [Koezientenmatrix eines linearen
Gleichungssystems].
Für ein lineares Gleichungssystem
a1 1 x1
+ a1 2 x2 + · · · + a1 n xn = b1
a2 1 x1
+ a2 2 x2 + · · · + a2 n xn = b2
.
.
.
.
.
.
am 1 x1
über
K
.
.
.
.
= ..
(4.2)
+ am 2 x2 + · · · + am n xn = bm
heiÿt
···
···
a1 n
.
.
.
..
.
.
.
am 2
···
a1 1
a1 2
a2 1
A = .
..
a2 2
am 1
.
a2 n
am n
∈ Km×n
die Koezientenmatrix des Gleichungssystems.
Lineare Gleichungssysteme und Matrizen
Math4Inf
93 / 567
Die Matrix
···
···
a1 n
.
.
.
..
.
.
.
am 2
···
a1 1
a1 2
a2 1
(A, b) = .
..
a2 2
am 1
.
b1
a2 n
b2
am n
bm
.
.
.
∈ Km×(n+1)
heiÿt erweiterte Matrix des Gleichungssystems.
Beispiel 4.8.
Für das lineare Gleichungssystem aus Beispiel 4.5 ergeben sich die
Koezientenmatrix und erweiterte Matrix
A
1
2
0
1
1
=
2
2
3
2
4
0
∈ R4×4 ,
3
0
0
3
2
Lineare Gleichungssysteme und Matrizen
1
2
0
1
1
1
(A, b) =
2
2
3
5
2
4
0
3
5
0
0
3
2
3
Math4Inf
∈ R4×5 .
94 / 567
Denition 4.9 [Elementare Zeilenumformungen einer
Matrix].
Sei A
∈ Km×n .
Unter elementaren Zeilenumformungen versteht
man die folgenden drei Operationen:
i) Vk ,l : Das Vertauschen der k -ten mit der l -ten Zeile aus A.
ii) Ak ,l (λ): Addition des
l -ten Zeile von A,
λ-fachen
λ ∈ K,
der k -ten Zeile von A zu der
iii) Mk (λ): Multiplikation der k -ten Zeile von A mit
•
λ ∈ K \ {0}.
Mittels elementarer Zeilenumformungen kann jede Matrix in
die sogenannte Stufenform überführt werden.
Lineare Gleichungssysteme und Matrizen
Math4Inf
95 / 567
Beispiel 4.10.
Überträgt man die Umformungen aus Beispiel 4.5 auf die
zugehörige erweiterte Matrix des Gleichungssystems (siehe Beispiel
4.8), dann ergeben sich die folgenden elementaren
Zeilenumformungen:
1
2
0
1
1
1
2
2
2
3
5
4
0
3
5
0
0
3
2
3
2
0
1
1
0
2
2
4
0
0
1
3
0
0
1
A2,4 (−3/2)
0
→
0
0
Lineare Gleichungssysteme und Matrizen
1
A1,2 (−1),A1,3 (−2)
0
→
0
0
1
A3,4 (1),M2 (1/2) 0
→
0
−1 −3
0
Math4Inf
2
0
1
1
0
2
2
4
0
0
1
3
0
3
2
3
2
0
1
1
0
1
1
2
0
0
1
3
0
0
0
0
96 / 567
Denition 4.11 [(Zeilen)Stufenform].
Eine Matrix A
∈ Km×n
hat (Zeilen)Stufenform wenn sie die
folgende Darstellung hat:
0
A
=
0
0
0
..
.
..
.
Hierbei sind
1
0
0
0
..
.
0
0
0
0
..
.
...
...
...
...
∗
∗
...
...
...
..
.
...
0
0
0
..
.
∗
∗
∗
...
...
1
0
0
..
.
..
.
∗
∗
...
...
0
0
..
.
∗
∗
∗
...
1
0
..
.
irgendwelche Elemente aus
..
.
K.
In Worten : A ist in (Zeilen)Stufenform wenn A
∈ {1, . . . , m} und eine
1 ≤ k1 < k2 < . . . < kr ≤ n
ein r
i) Für i
ii) Für 1
> r,
1
≤ j ≤ n,
≤i ≤r
ist ai
0
..
.
∗
∗
∗
1
..
.
= 0,
∗
∗
∗
∗
..
.
...
...
...
...
..
.
∗
∗
∗
∗
..
.
.
oder es gibt
Folge von Zahlen
mit folgenden Eigenschaften:
ist ai
k =1
i
...
...
...
j = 0,
und ai j = 0
für j
< ki .
k1 , . . . , kr sind (heiÿen) die Spaltenindizes der Stufen.
Lineare Gleichungssysteme und Matrizen
Math4Inf
97 / 567
Bemerkung 4.12.
i) Ist A
6= 0
in Stufenform und ist i
≤ r,
dann steht das erste von
Null verschiedene Element (eine 1) der i -ten Zeile der Matrix
in der ki -ten Spalte. Mit wachsendem i wandern diese ersten
von Null verschiedenen Glieder wegen ki
ii) Ist A
6= 0
< ki +1
nach rechts.
in Stufenform, dann hat A genau r Zeilen, in der
nicht nur Nullen stehen.
Satz 4.13.
Jede Matrix A
∈ Km×n
kann durch elementare Zeilenumformungen
in Stufenform gebracht werden.
Lineare Gleichungssysteme und Matrizen
Math4Inf
98 / 567
Bemerkung 4.14 [Gauÿ-Algorithmus].
Mittels elementarer Zeilenumformungen kann die erweiterte Matrix
(A, b) ∈ Km×(n+1) eines linearen Gleichungssystems
n und
(A0 , b0 ) überführt werden. Sei A0 = (ai0 j )im,j,=
1
0
0
0
0
0
b = (b1 , . . . , bm ). Dann hat (A , b ) die Gestalt
0 . . . 0 1 ∗ . . . . . . . . . . . . . . .
0
0
0 0
0
(A , b ) =
0
0
0
0
0
0
Dabei ist br +1
in Stufenform
∗
...
...
...
...
...
...
...
...
1
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
0
0
...
0
1
.
.
.
.
.
.
1
0
0
.
.
.
0
...
0
10
2
b
b
.
.
.
0
r
0
r +1
0
.
.
.
b
b
.
.
.
0
∈ { 0 , 1 }.
0 0
Das zu (A , b ) zugehörige Gleichungssystem hat die gleiche
Lösungsmenge wie das gegebene Gleichungssystem (siehe Lemma
4.4).
Lineare Gleichungssysteme und Matrizen
Math4Inf
99 / 567
•
0
Ist br +1
= 1,
dann lautet die
Gleichungssystems
(r + 1)-te
Gleichung des
(A0 , b0 )
0 x1
+ 0 x2 + · · · + 0 xn = 1.
Also hat das Gleichungssystem keine Lösung.
•
0
Sei br +1
=0
und seien 1
≤ k1 < k2 < · · · < kr ≤ n
die
Spaltenindizes der Stufen. Dann ist das Gleichungssystem
(A0 , b0 )
gegeben durch
xk1
+
xk2
+
n
X
j =k1 +1
n
X
j =k2 +1
0
= b10 ,
0
= b20 ,
a1 j xj
a2 j xj
.
.
.
xkr
Lineare Gleichungssysteme und Matrizen
+
n
X
j =k
r
.
.
.
0
ar
0
j xj = br .
+1
Math4Inf
100 / 567
In diesem Fall sind alle xj , auÿer xk1 , . . . , xkr frei wählbar; aus der
Wahl von xj , j
∈
/ {k1 , . . . , kr },
lassen sich dann die restlichen
xk1 , . . . , xkr rückwärts berechnen:
xkr
0
= br −
n
X
j =k
r
xkr −1
= br0 −1 −
0
a1 j xj ,
+1
n
X
0
j =k −1 +1
ar −1 j xj ,
r
.
.
.
xk1
Lineare Gleichungssysteme und Matrizen
.
.
.
0
= b1 −
n
X
j =k1 +1
0
a1 j xj .
Math4Inf
101 / 567
Satz 4.15.
Mit der obigen Notation gilt:
i) Ist br0 +1
=1
dann ist das Gleichungssystem nicht lösbar.
ii) Ist br0 +1 = 0 dann ist das Gleichungssystem lösbar.
a) Ist r = n, dann ist das Gleichungssystem eindeutig
b)
Ist r < n, dann gibt es mehrere Lösungen.
Lineare Gleichungssysteme und Matrizen
Math4Inf
lösbar.
102 / 567
Denition 4.16 [Addition von Matrizen].
Seien A, B
∈ Km×n
mit A
= (ai j )
und B
Addition von A und B , geschrieben A
A
A
+B
•
+B
+ b1 1
a2 1 + b2 1
=
.
.
.
am 1 + bm 1
a1 1
ist wieder eine m
= (bi j ).
+ B,
deniert als
+ b1 2
a2 2 + b2 2
···
···
.
.
.
..
a1 2
am 2
.
+ bm 2 · · ·
× n-Matrix,
d.h. A
Dann ist die
+ b1 n
a2 n + b2 n
.
.
.
am n + bm n
a1 n
+ B ∈ Km×n .
∈ Km×n ,
A = (ai j ), B = (bi j ) sind gleich,
= B , wenn sie die gleichen Koezienten haben,
ai j = bi j , für 1 ≤ i ≤ m, 1 ≤ j ≤ n.
Zwei Matrizen A, B
geschrieben A
d.h. wenn
Lineare Gleichungssysteme und Matrizen
Math4Inf
103 / 567
Denition 4.17 [Multiplikation mit einem Skalar].
∈ Km×n und λ ∈ K. Die Multiplikation von A mit λ,
geschrieben λ · A (bzw. λA), ist deniert als
λ a1 1 λ a1 2 · · · λ a1 n
λ a2 1 λ a2 2 · · · λ a2 n
λ·A= .
.
.
.
..
.
.
.
.
.
.
.
λ am 1 λ am 2 · · · λ am n
Sei A
λ·A
ist wieder eine m
Lineare Gleichungssysteme und Matrizen
× n-Matrix,
d.h.
λ · A ∈ Km×n .
Math4Inf
104 / 567
Satz 4.18.
Seien A, B , C
∈ Km×n , λ, µ ∈ K.
i) A + B =B
ii) A + (B
iii) A + 0
iv)
+ A,
Dann gilt
(Kommutativität),
+ C ) = (A + B ) + C ,
=A
und A
(Assoziativität),
+ (−A) = 0,
λ(µ A) = (λ µ) A,
v) 1 A
= A,
vi)
λ (A + B ) = λ A + λ B und (λ + µ)A = λ A + µ A.
m×n , +) eine kommutative Gruppe mit
Insbesondere ist (K
m×n ist −A das inverse
neutralem Element 0, und für A ∈ K
Element.
Lineare Gleichungssysteme und Matrizen
Math4Inf
105 / 567
Denition 4.19 [Transponierte einer Matrix].
Sei A
∈ Km×n .
|
Die transponierte Matrix von A, bezeichnet mit A
(gesprochen A transponiert), ist deniert als die
(n × m)-Matrix,
deren Spalten gleich den Zeilen von A, und deren Zeilen gleich den
Spalten von A sind, d.h.
|
A
= (ai|j )ni ,,jm=1
|
mit ai
j = aj i ,
1
≤ i ≤ n,
1
≤ j ≤ m.
Bemerkung 4.20.
Seien A, B
i)
(A +
∈ Km×n
|
B)
ii) (λ A)|
iii) (A| )|
=
=
und
|
A
+
λ ∈ K.
Dann gilt
|
B ,
λ A| ,
= A.
Lineare Gleichungssysteme und Matrizen
Math4Inf
106 / 567
Denition 4.21 [Quadratische Matrizen].
= (ai j ) heiÿt quadratisch.
≤ i ≤ n, heiÿen Diagonalelemente
i) Eine (n, n)-Matrix A
Die Elemente ai i , 1
von A.
ii) Eine quadratische Matrix, bei der alle Elemente auÿer den
Diagonalelementen Null sind, heiÿt Diagonalmatrix.
iii) Die Diagonalmatrix, bei der alle Diagonalelemente 1 sind,
heiÿt Einheitsmatrix. Bezeichnung: In .
iv) Eine quadratische Matrix A
= (ai j ),
bei der alle Elemente
unterhalb (oberhalb) der Diagonalen Null sind, d.h. für die
ai
j =0
für 1
≤j <i ≤n
ai
j =0
für
1
≤i <j ≤n
gilt, heiÿt obere (untere) Dreiecksmatrix.
v) Eine quadratische (n, n)Matrix A
alle 1
≤ i, j ≤ n
= (ai j )
mit ai
j = aj i
für
heiÿt symmetrisch.
Bemerkung 4.22.
Ist A
∈ Kn×n
symmetrisch, dann gilt also A
Lineare Gleichungssysteme und Matrizen
|
= A.
Math4Inf
107 / 567
Denition 4.23 [Produkt (Multiplikation) von
Matrizen].
Sei A
∈ Km×n
und sei B
∈ Kn×r .
Das Produkt von A und B ,
geschrieben A · B (bzw. A B ), ist die m
× r -Matrix
C
= (ci j ),
deren
Koezienten deniert sind als
ci j
für 1
=
n
X
k =1
≤ i ≤ m,
1
ai k bk j
= ai 1 b1 j + ai 2 b2 j + · · · + ai n bn j ,
≤ j ≤ r.
Man beachte: Das Produkt A
·B
ist nur deniert, wenn die Anzahl
der Spalten von A gleich der Anzahl der Zeilen von B ist!
m
Lineare Gleichungssysteme und Matrizen
×n
mal n
×r
ergibt m
× r .
Math4Inf
108 / 567
Satz 4.24.
i) A(B C )
= (A B )C ,
für A
∈ Km×n ,
∈ Kn×r ,
B
C
∈ Kr ×q
(Assoziativität),
ii)
(A + B ) C = A C + B C für A, B ∈ Km×n , C ∈ Kn×r ,
m×n , B , C ∈ Kn×r
A(B + C ) = A B + A C für A ∈ K
(Distributivität)
iii)
iv)
•
(λ A)B = λ(A B ) = A(λ B ), für A ∈ Km×n ,
(A B )| = B | A| für A ∈ Km×n , B ∈ Kn×r .
B
bzw.
∈ Kn×r , λ ∈ K,
Im Allgemeinen ist die Matrixmultiplikation nicht kommutativ:
1
1
−1
−1
·
1
1
Lineare Gleichungssysteme und Matrizen
1
−1
=
0
0
2
2
6=
2
0
−2
0
=
Math4Inf
1
1
1
−1
·
1
1
−1
−1
109 / 567
•
Für A
∈ Kn×n
und In
∈ Kn×n
A
•
Ist A
∈ Kn×n
ist
· In = In · A = A.
eine quadratische Matrix, so ist A
· A,
A
·A·A
usw. immer deniert und man schreibt abkürzend
1
A
= A,
2
A
0
Zudem setzt man A
Lineare Gleichungssysteme und Matrizen
= A A,
. . . , An = AAn−1 ,
n
∈ N.
= In .
Math4Inf
110 / 567
•
Sei A
∈ Km×n ,
A
= (ai j ),
und sei x die n
× 1-Matrix
mit den
Unbekannten x1 , . . . , xn , d.h.
x1
x
x2
= . .
..
xn
Dann ist
Ax
Pn
a
x
a1 1 x1 + a1 2 x2 + · · · + a1 n xn
Pnj =1 1 j j
j =1 a2 j xj a2 1 x1 + a2 2 x2 + · · · + a2 n xn
=
=
.
.
.
.
.
Pn .
am 1 x1 + am 2 x2 + · · · + am n xn
j =1 am j xj
Lineare Gleichungssysteme und Matrizen
Math4Inf
111 / 567
•
Ist nun b
∈ Km×1
mit
b
b1
b2
= . ,
..
bm
dann lässt sich das lineare Gleichungssystem (4.1) schreiben als
Ax
Lineare Gleichungssysteme und Matrizen
= b.
Math4Inf
112 / 567
Denition 4.25 [(In)homogenes Gleichungssystem].
Sei A
∈ Km×n
und b
∈ Km×1 .
Ist b
inhomogenes Gleichungssystem und
6= 0, dann heiÿt A x = b
A x = 0 heiÿt (das zugehörige)
homogene Gleichungssystem.
Satz 4.26.
Sei A
∈ Km×n
und b
∈ Km×1 .
i) Sind v , w Lösungen von A x
= b,
zugehörigen homogenen Gleichungssystems
ii) Ist v Lösung von A x
v
+z
iii) A x
= b und
= b.
− w Lösung
A x = 0.
dann ist v
z Lösung von A x
= 0,
des
dann ist
Lösung von A x
=b
ist eindeutig lösbar, genau dann wenn das zugehörige
homogene Gleichungssystem A x
d.h. x1
= x2 = · · · = xn = 0,
Lineare Gleichungssysteme und Matrizen
=0
nur die triviale Lösung,
hat.
Math4Inf
113 / 567
Denition 4.27 [Inverse Matrix].
∈ Kn×n eine
∈ Kn×n mit
Sei A
B
quadratische Matrix. Gibt es eine Matrix
A
· B = B · A = In ,
dann heiÿt die Matrix A invertierbar oder reguläre Matrix. Die
−1 bezeichnet und die zu A inverse Matrix
Matrix B wird mit A
genannt.
Bemerkung 4.28.
Zum Bestimmen der inversen Matrix A
−1 reicht es eine Matrix B
zu bestimmen, so dass eine der beiden Forderungen A
B
· A = In
· B = In
oder
erfüllt. Die jeweils andere ist automatisch mit erfüllt.
Lineare Gleichungssysteme und Matrizen
Math4Inf
114 / 567
Beispiel 4.29.
•
4
b1 1
b1,2
. Gesucht ist eine Matrix B =
−1 3
b2 1
b2 2
A B = I2 , d.h.
2 b1 1 + 4 b2 1
2 b1 2 + 4 b2 2
1 0
AB =
,
=
−b1 1 + 3 b2,1 −b1 2 + 3 b2 2
0 1
Sei A
mit
2
=
bzw.
2 b1 1
+ 4 b2 1 = 1,
−b1 1 + 3 b2,1 = 0,
•
2 b1 2
+ 4 b2 2 = 0,
−b1 2 + 3 b2 2 = 1.
Für jede Spalte der Matrix B erhält man also ein lineares
Gleichungssystem. Lösen der Gleichungssysteme führt zu
b1 1
= 3/10,
b2 1
= 1/10,
ist
−1
A
Lineare Gleichungssysteme und Matrizen
= −2/5 und
1
3 −4
=
.
b1 2
10
1
b2 2
= 1/5.
Somit
2
Math4Inf
115 / 567
Satz 4.30.
Sei A
∈ Kn×n
und seien ei
1
e1
0
= 0 ,
..
.
∈ Kn×1 mit
0
e2
0
1
0
= 0 , . . . , en = ... ,
..
.
0
0
0
1
die Spalten der Einheitsmatrix In . Zum Bestimmen der inversen
−1 (falls sie existiert) müssen n lineare Gleichungssysteme
−1 ist die
in n Unbekannten gelöst werden. Die j -te Spalte von A
Matrix A
Lösung des System
Ax
= ej .
Satz 4.31.
Sei A
∈ Kn×n
regulär. Das Gleichungssystem A x
=b
hat die
−1 b.
eindeutige Lösung A
Lineare Gleichungssysteme und Matrizen
Math4Inf
116 / 567
Satz 4.32.
Seien A, B
∈ Kn×n
regulär.
i) Dann ist A B regulär und es gilt (A B )−1
ii)
= B −1 A−1 ,
(A−1 )| = (A| )−1 ,
iii)
(A−1 )−1 = A,
iv)
(λA)−1 =
1
−1
λA ,
Lineare Gleichungssysteme und Matrizen
λ ∈ K \ {0}.
Math4Inf
117 / 567
Vektorräume
Denition 5.1 [Vektorraum].
Sei
(K, ⊕, )
ein Körper mit Einselement 1. Ein
K-Vektorraum
ist
eine nicht-leere Menge V mit zwei Verknüpfungen
+ : V × V → V,
· : K × V → V,
(v, w) 7→ v + w
(λ, v) 7→ λ · v
(Vektoraddition),
(Skalarmultiplikation)
so dass gilt:
i)
(V , +) ist kommutative Gruppe mit neutralem Element 0,
für a ∈ V wird das inverse Element mit −a bezeichnet,
ii) 1 · v
iii)
iv)
v)
=v
und
v ∈ V,
(λ µ) · v = λ · (µ · v) für alle λ, µ ∈ K und v ∈ V ,
(λ ⊕ µ) · v = λ · v + µ · v für alle λ, µ ∈ K und v ∈ V ,
λ · (v + w) = λ · v + λ · w für alle λ ∈ K und v, w ∈ V .
für alle
Die Elemente von V heiÿen Vektoren.
Vektorräume
Math4Inf
118 / 567
Bemerkung 5.2.
Aufgrund der Eigenschaften ii)-v), und da die entsprechenden
Verknüpfungen immer aus dem Zusammenhang ersichtlich sind,
λ v statt λ · v, (λµ) v
(λ ⊕ µ) · v.
schreibt man auch einfach
und
Vektorräume
(λ + µ) v
statt
Math4Inf
statt
(λ µ) · v
119 / 567
Beispiel 5.3.
i)
ii)
Kn×m ,
aus K,
× m-Matrizen mit Koezienten
K-Vektorraum (siehe Satz 4.18).
n
n×1 . Die
Ist in i) m = 1, dann schreibt man K anstatt K
n
Koezienten von x ∈ K werden mit x1 , . . . , xn bezeichnet,
d.h.
d.h. die Menge aller n
bilden einen
x1
x2
x=
.. = (x1 , x2 , . . . , xn )| .
.
xn
Die Vektoraddition und Skalarmultiplikation sind in diesem Fall
y1
x1
x1 + y1
x1
λ x1
x2 y2 x2 + y2
x λ x
+ . = . , λ x = λ .2 = . 2 .
x+y =
.
.. .. ..
.. ..
xn
Vektorräume
yn
xn + yn
Math4Inf
xn
λ xn
120 / 567
iii) Für n
= 2 kann man sich den Vektorraum R2
als Ebene mit der
bekannten Vektoraddition und Skalarmultiplikation vorstellen.
x+y
y
2
y
(−1/2) x
1
x
x
iv)
1
y
2
x
Abbildung: Vektoraddition und Skalarmultiplikation im R2
3
Analog kann man den R mit dem drei-dimensionalen
Anschauungsraum identizieren.
Vektorräume
Math4Inf
121 / 567
v) Sei M eine Menge und
(K, +, ·) ein Körper. Die Menge aller
K, bezeichnet mit KM , ist ein
Abbildungen von M nach
K-Vektorraum
mit den Verknüpfungen
+ : KM × KM → KM , (f , g ) 7→ f + g mit (f + g )(x ) = f (x ) + g (x )
· : K × KM → KM , (λ, f ) 7→ λ · f mit (λ · f )(x ) = λ · f (x ).
: K → K der Form
= an x n + an−1 x n−1 + · · · + a1 x + a0 , ai ∈ K, heiÿt
Polynom über K vom Grad ≤ n. Die Menge aller Polynome
über K vom Grad ≤ n bilden einen K-Vektorraum mit den
vi) Eine Funktion f
f (x )
obigen Verknüpfungen. Aber auch die Menge aller Polynome
bildet einen
Vektorräume
K-Vektorraum.
Math4Inf
122 / 567
Bemerkung 5.4.
Ist V ein
K-Vektorraum,
0
für alle
λ ∈ K, a ∈ V .
Weiterhin ist
Vektorräume
a = 0,
dann gilt insbesondere
λ 0 = 0,
(−λ) a = −(λ a),
Hierbei ist 0 das neutrale Element von
λv = 0 ⇔ λ = 0
oder
Math4Inf
K.
v = 0.
123 / 567
Denition 5.5 [Teilraum].
Sei V ein
K-Vektorraum.
Eine nicht-leere Teilmenge U
⊆V
heiÿt
Teilraum oder Untervektorraum von V , falls U selbst ein
K-Vektorraum
im Sinne der Denition 5.1 ist.
Satz 5.6 [Unterraumkriterium].
Sei V ein
K-Vektorraum
und U
⊆V
eine nicht-leere Teilmenge. U
ist genau dann ein Teilraum von V , wenn gilt
i)
ii)
0 ∈ U,
λv + w ∈ U
für alle
v, w ∈ U
und
λ ∈ K.
Beispiel 5.7.
i)
{0 }
und V sind triviale Teilräume eines Vektorraums V .
ii) Jede Gerade im
des
R
2
R2 ,
die den Nullpunkt enthält, ist ein Teilraum
. Geraden, die nicht den Nullpunkt enthalten, sind keine
Teilräume.
Vektorräume
Math4Inf
124 / 567
Satz 5.8.
Sei A
∈ Km×n .
Die Lösungsmenge des homogenen
x = 0,
= {x ∈ Kn : A x = 0} ist
Gleichungssystems A
d.h. die Menge
U
ein Teilraum von
Kn .
Bemerkung 5.9.
Für
a = (a1 , . . . , an )| ∈ Rn \ {0}, α ∈ R,
heiÿt
H (a, α) =
∈ Rn : a1 x1 + a2 x2 + · · · + an xn = α}
Hyperebene . Die 0 enthaltenen Hyperebenen, d.h. H (a, 0), sind
Teilräume, und für α 6= 0 ist H (a, α) kein Teilraum.
{(x1 , . . . , xn )|
Denition 5.10 [Summe von Teilräumen].
Sei V ein
K-Vektorraum,
und seien U , U
0 Teilräume von V . Unter
+ U 0 , versteht man die
0
der Summe von U und U , geschrieben U
Menge
U
Lemma 5.11.
+ U 0 = {u + u0 : u ∈ U , u0 ∈ U 0 }.
K-Vektorraum, und seien U , U 0 ⊆ V
0
0
sind auch U ∩ U und U + U Teilräume
Sei V ein
Dann
Vektorräume
Math4Inf
Teilräume von V .
von V .
125 / 567
Denition 5.12 [Linearkombination].
Sei V ein
K-Vektorraum,
der Form
m
X
i =1
und seien
v1 , . . . , vm ∈ V .
Ein Ausdruck
λ i vi = λ 1 v1 + λ 2 v2 + · · · + λ m vm
heiÿt Linearkombination von
v1 , . . . , vm .
Denition 5.13 [Lineare Hülle].
Sei V ein
K-Vektorraum,
und sei M
⊆V
eine nicht-leere Teilmenge
von V . Dann heiÿt
lin M
=
( m
X
i =1
)
λi vi : m ∈ N, λi ∈ K, vi ∈ M ,
1
≤i ≤m
die lineare Hülle von M . In Worten: lin M ist die Menge aller
endlichen Linearkombinationen von Elementen aus M .
Vektorräume
Math4Inf
126 / 567
Lemma 5.14.
Sei V ein
K-Vektorraum,
und sei M
⊆V
eine nicht-leere Teilmenge
von V . Dann ist lin M Teilraum von V .
Bemerkung 5.15.
Sei V ein
K-Vektorraum,
lin {v1 , . . . , vk }
=
und seien
( k
X
i =1
v1 , . . . , vk ∈ V .
Dann ist
)
λi vi : λi ∈ K,
1
≤i ≤k
.
Beispiel 5.16.
, 01 } = R2 .
2 2 1
lin { −1 , 1 , −3 } = R2 .
−3
1
lin { −1 , 3 } = {(x1 , x2 )| ∈ R2 : x1 = −x2 }.
i) lin {
ii)
iii)
Vektorräume
1
0
Math4Inf
127 / 567
Denition 5.17 [Erzeugendensystem].
Sei V ein
K-Vektorraum
und M
⊆ V,
M
6= ∅.
Ist lin M
= V,
dann
heiÿt M ein Erzeugendensystem von V .
Man vereinbart, dass die leere Menge ein Erzeugendensystem des
trivialen Vektorraumes
{0 }
ist.
Beispiel 5.18.
i)
ii)
iii)
Vektorräume
1
, 01 ist ein Erzeugendensystem von R2 .
2 2 1
2
−1 , 1 , −3 ist ein Erzeugendensystem von R .
−3
1
2
−1 , 3 ist kein Erzeugendensystem von R .
0
Math4Inf
128 / 567
Denition 5.19 [Linear (un)abhängig].
Sei V ein
K-Vektorraum,
v1 , . . . , vm
und seien
m
X
i =1
mit
v1 , . . . , vm ∈ V .
Die Vektoren
heiÿen linear unabhängig, wenn aus
λi ∈ K,
stets folgt
λ i vi = 0 ,
(5.1)
λ1 = λ2 = · · · = λm = 0.
Sind die Vektoren nicht linear unabhängig, dann heiÿen sie linear
abhängig.
Bemerkung 5.20.
i)
v1 , . . . , vm
sind also genau dann linear unabhängig, wenn die
einzige Möglichkeit den Nullvektor
Vektoren
v1 , . . . , vm
0 als Linearkombination der
zu schreiben, die triviale ist, d.h. alle
Skalare sind 0.
ii)
v1 , . . . , vm
Skalare
Vektorräume
sind also genau dann linear abhängig, wenn es
λ1 , . . . , λ m
erfüllt ist.
gibt, die nicht alle 0 sind, so dass (5.1)
Math4Inf
129 / 567
Beispiel 5.21.
i)
ii)
iii)
iv)
1
, 01 ∈ R2 sind linear unabhängig.
2 2 1
−1 , 1 , −3 sind linear abhängig.
−3
1
−1 , 3 sind linear abhängig.
0
0
ist linear abhängig.
Lemma 5.22.
Sei V ein
K-Vektorraum
und seien
v1 , . . . , vm ∈ V .
Dann sind die
folgenden Aussagen äquivalent:
i)
v1 , . . . , vm
ii) Es gibt ein
sind linear abhängig.
v j ∈ { v 1 , . . . , v m },
das sich als Linearkombination
der übrigen Vektoren darstellen lässt, d.h.
vj ∈ lin {v1 , . . . , vj −1 , vj +1 , . . . , vm }.
Vektorräume
Math4Inf
130 / 567
Denition 5.23.
Die Vektoren
ei ∈ Kn
mit
1
0
e1 =
0 ,
..
.
0
0
1
0
.
e2 =
0 , . . . , en = .. ,
..
.
0
0
0
1
d.h. die Spalten der Einheitsmatrix In , heiÿen Einheitsvektoren.
Bemerkung 5.24.
Die Einheitsvektoren
e1 , . . . , en ∈ Kn
bilden ein Erzeugendensystem von
Vektorräume
sind linear unabhängig und
Kn ,
Math4Inf
d.h. lin {
e1 , . . . , en } = Kn .
131 / 567
Notation 5.25.
Ein Erzeugendensystem M eines Vektorraums V heiÿt minimales
Erzeugendensystem, wenn für alle
v∈M
gilt, dass M
\ {v }
kein
Erzeugendensystem mehr ist.
Satz 5.26.
{v1 , . . . , vm } ein Erzeugendensystem eines Vektorraums V .
Dann ist {v1 , . . . , vm } ein minimales Erzeugendensystem genau
dann wenn v1 , . . . , vm linear unabhängig.
Sei
Denition 5.27 [Basis].
Ein minimales Erzeugendensystem M eines
K-Vektorraums
heiÿt
Basis.
Denition 5.28 [Dimension].
Sei V ein
K-Vektorraum
mit Basis M
⊆ V.
Dann heiÿt die
Mächtigkeit von M die Dimension von V und wird mit dimK (V )
(oder einfach dim(V )) bezeichnet.
Ist dimK (V ) endlich, dann heiÿt V endlichdimensionaler
Vektorraum; ansonsten unendlichdimensionaler Vektorraum.
Vektorräume
Math4Inf
132 / 567
Beispiel 5.29.
i) dimK (Kn )
ii)
iii)
= n.
m
×
n ) = m · n.
dimK (K
dimC (C) = 1, aber betrachtet
dann ist dimR (C) = 2.
man
C
als Vektorraum über
R,
iv) Der Vektorraum aller Polynome über einem Körper ist nicht
endlichdimensional.
•
Im folgenden betrachten wir nur endlichdimensionale
Vektorräume!
Vektorräume
Math4Inf
133 / 567
Notation 5.30.
Ein Menge
{v1 , . . . , vn }
von linear unabhängigen Vektoren eines
K-Vektorraums V heiÿt maximal, wenn für jedes v ∈ V
v1 , . . . , vn , v linear abhängig sind.
die
Vektoren
Lemma 5.31.
Sei V ein
K-Vektorraum,
vi ∈ V , 1 ≤ i ≤ n. {v1 , . . . , vn }
{v1 , . . . , vn } eine Menge von
und seien
ist Basis von V genau dann, wenn
maximal linear unabhängige Vektoren in V ist.
•
Minimale Erzeugendensysteme sind also maximale Mengen von
linear unabhängigen Vektoren.
Satz 5.32.
Sei V ein
K-Vektorraum
mit Basis
{v 1 , . . . , v n }.
Jeder Vektor
v ∈ V lässt sich eindeutig als Linearkombination der Vektoren
v1 , . . . , vn darstellen, d.h. für jedes v ∈ V gibt es eindeutig
bestimmte
λ1 , . . . , λ n ∈ K
mit
v=
Vektorräume
n
X
λ i vi .
i =1
Math4Inf
134 / 567
Satz 5.33.
Sei V ein
K-Vektorraum
mit dimK (V )
= n.
Dann ist jede Menge
von n linear unabhängigen Vektoren eine Basis von V , und jede
Basis besteht aus genau n Vektoren. Desweiteren kann jede Menge
von linear unabhängigen Vektoren zu einer Basis ergänzt werden.
Bemerkung 5.34.
Da jeder Teilraum U eines
K-Vektorraumes
V selbst ein
Vektorraum ist, sind auch für Teilräume Begrie wie Basis,
Dimension etc. wohldeniert.
Insbesondere ist dimK {
0} = 0.
Beispiel 5.35.
i) Die den Nullpunkt enthaltenen Geraden im
R2
oder
R3
haben
die Dimension 1.
ii) Die Ebenen im
R3 ,
die den Nullpunkt enthalten, haben
Dimension 2.
Vektorräume
Math4Inf
135 / 567
Bemerkung 5.36.
Für
a = (a1 , . . . , an )| ∈ Rn \ {0}
a, 0)
H(
gleich n
− 1,
ist die Dimension der Hyperebne
a, 0)) = n − 1
also dimR (H (
(siehe Bemerkung
5.9).
Satz 5.37.
Seien U , U
0 Teilräume eines
dimK (U
Vektorräume
K-Vektorraumes
V . Dann gilt
+ U 0 ) = dimK (U ) + dimK (U 0 ) − dimK (U ∩ U 0 ).
Math4Inf
136 / 567
Lineare Abbildungen und Matrizen
Denition 6.1 [Lineare Abbildung].
Seien V , W zwei
K-Vektorräume.
Eine Abbildung f
:V →W
heiÿt
lineare Abbildung, wenn gilt:
i) f (x + y)
ii) f (λ x)
= f (x) + f (y)
= λ f (x)
für alle
für alle
x∈V
x, y ∈ V ,
und
λ ∈ K.
Bemerkung 6.2.
Insbesondere gilt für eine lineare Abbildung f
(0) = 0.
Beispiel 6.3.
i) f
: R2 → R2
mit f
(x) = −x
ist eine lineare Abbildung
(Spiegelung am Ursprung) .
ii) f
: R2 → R2
mit f
((x1 , x2 )| ) = (x2 , x1 )|
ist eine lineare
Abbildung (Spiegelung an der 45 Grad-Achse).
Lineare Abbildungen und Matrizen
Math4Inf
137 / 567
iii) f
Abbildung
iv) f
((x1 , x2 , x3 )| ) = (x1 , x2 )| ist eine lineare
(Orthogonale Projektion auf die (x1 , x2 )-Ebene) .
: R3 → R2
((x1 , x2 )| ) = (x1 , x2 , 0)|
2
3
(Einbettung des R im R ).
: R2 → R3
Abbildung
mit f
mit f
ist eine lineare
a ∈ R2 , a 6= 0. Die Abbildung Ta : R2 → R2 mit
Ta (x) = x + a ist keine lineare Abbildung (Translation
v) Sei
Lineare Abbildungen und Matrizen
Math4Inf
um
a).
138 / 567
Bemerkung 6.4.
Seien V , W zwei
Abbildung. Seien
Dann gilt
K-Vektorräume, und sei f : V → W eine lineare
v1 , . . . , vm ∈ V und λ1 , . . . , λm ∈ K, m ∈ N.
!
m
m
X
X
λi f (vi ).
f
λ i vi =
i =1
i =1
Satz 6.5.
Eine Abbildung f
Matrix
m ×n
A ∈ K
: Kn → Km
ist genau dann linear, wenn es eine
gibt mit
f
(x) = A x
für alle
a1 , . . . , an ∈ Km der Matrix
n
Einheitsvektoren e1 , . . . , en ∈ K , d.h.
Die Spalten
ai = f (ei ),
Lineare Abbildungen und Matrizen
1
x ∈ Kn .
A sind die Bilder der
≤ i ≤ n.
Math4Inf
139 / 567
Beispiel 6.6.
i) f
: R2 → R2
mit f
(x) = −x:
−1
A =
0
−1
0
ii) f
: R2 → R2
mit f
: R3 → R2
mit f
0
((x1 , x2 , x3 )| ) = (x1 , x2 )| :
1 0 0
A =
.
0
Lineare Abbildungen und Matrizen
.
((x1 , x2 )| ) = (x2 , x1 )| :
0 1
A =
.
1
iii) f
1
0
Math4Inf
140 / 567
iv) f
: R2 → R3
mit f
((x1 , x2 )| ) = (x1 , x2 , 0)| :
1
A
= 0
0
0
1 .
0
: R2 → R4 mit
|
|
f ((x1 , x2 ) ) = (2 x1 − 3 x2 , x2 , x1 − x2 , −5 x1 ) :
2
−3
0
1
A =
1 −1 .
−5 0
v) f
Lineare Abbildungen und Matrizen
Math4Inf
141 / 567
Satz 6.7.
Seien V , W zwei
von V . Seien
K-Vektorräume,
w1 , . . . , wn ∈ W .
bestimmte lineare Abbildung f
f
und sei
{v1 , . . . , vn }
eine Basis
Dann gibt es eine eindeutig
:V →W
(vi ) = wi ,
1
mit
≤ i ≤ n.
Also: Lineare Abbildungen sind eindeutig durch die Bilder einer
Basis festgelegt.
Denition 6.8 [Ane Abbildung].
∈ Km×n und a ∈ Km . Die Abbildung f : Kn → Km
n
f (x) = A x + a für alle x ∈ K heiÿt ane Abbildung.
Sei A
Lineare Abbildungen und Matrizen
Math4Inf
mit
142 / 567
Denition 6.9 [Drehung im R ].
2
Unter der Drehung (Rotation) im
Winkel
θ
R2
0
um den Ursprung ( ) mit
2
: R → R mit
x1
x1
cos θ − sin θ
.
rotθ
=
sin θ
cos θ
x2
x2
versteht man die Abbildung rotθ
Denition 6.10 [Translationen].
Sei
a ∈ Rn .
2
Die Abbildung Ta
: Rn → Rn
Translation (Verschiebung) um
a.
Bemerkung 6.11.
Die Drehung im
R2
um den Punkt
v
x) = x + a
mit Ta (
mit Winkel
θ
heiÿt
ist gegeben
= Tv ◦ rotθ ◦ T−v , d.h.
cos θ − sin θ
f (x) = v +
· (x − v).
sin θ
cos θ
durch die Abbildung f
Lineare Abbildungen und Matrizen
Math4Inf
143 / 567
Satz 6.12.
: Kn → Km und g : Km → Kr lineare Abbildungen mit
m×n , B ∈ Kr ×m . Dann ist
f (x) = A x und g (y) = B y mit A ∈ K
n
r
g ◦ f : K → K wieder eine lineare Abbildung mit
Seien f
(g ◦ f )(x) = (B A) x.
Satz 6.13.
Eine lineare Abbildung f
: Kn → Kn
mit f
(x) = A x
ist bijektiv
genau dann, wenn A regulär ist. Die zugehörige Umkehrabbildung
f
−1
: Kn → Kn
ist dann gegeben durch f
Lineare Abbildungen und Matrizen
−1 (y)
Math4Inf
= A−1 y.
144 / 567
Denition 6.14 [Rotation(en) im R ].
3
Unter der Rotation im
R3
um die Koordinaten-Achsen lin {e3 },
lin {e2 } oder lin {e1 } mit Winkel
i) x3 -Achse; rote3 ,θ
3
:R →R
3
θ
versteht man die Abbildung(en)
mit
x1
cos θ − sin θ 0
cos θ 0 · x2 ,
rote3 ,θ (x) = sin θ
0
0 1
x3
ii) x2 -Achse; rote2 ,θ
: R3 → R3
mit
cos θ 0 − sin θ
x1
0 1
0 · x2 ,
rote2 ,θ (x) =
sin θ 0
cos θ
x3
iii) x1 -Achse; rote1 ,θ
: R3 → R3
mit
1
0
0
x1
rote1 ,θ (x) = 0 cos θ − sin θ · x2 .
0 sin θ
cos θ
x3
Lineare Abbildungen und Matrizen
Math4Inf
145 / 567
Denition 6.15 [Isomorphe Vektorräume].
Zwei
K-Vektorräume
V , W heiÿen isomorph zueinander, falls es
eine bijektive lineare Abbildung f
:V →W
gibt.
Satz 6.16.
Je zwei endlich dimensionale
K-Vektorräume
der gleichen
Dimension n sind zueinander isomorph.
Lineare Abbildungen und Matrizen
Math4Inf
146 / 567
Denition 6.17.
: V → W eine lineare Abbildung
K-Vektorräumen V , W . Die Menge
Sei f
Kern(f )
zwischen zwei
= {v ∈ V : f (v) = 0} ⊆ V
heiÿt Kern der Abbildung f , und die Menge
Bild(f )
= f (V ) ⊆ W
heiÿt Bild der Abbildung f .
Bemerkung 6.18.
Kern(f ) ist Teilraum von V , und Bild(f ) ist Teilraum von W .
Satz 6.19.
Eine lineare Abbildung ist genau dann injektiv, wenn
Kern(f )
= {0 }.
Lineare Abbildungen und Matrizen
Math4Inf
147 / 567
Satz 6.20 [Dimensionsformel].
Sei f : V → W eine lineare Abbildung zwischen zwei
K-Vektorräumen V , W , und sei V endlich-dimensional.
dim V
Dann gilt:
= dim Bild(f ) + dim Kern(f ).
Denition 6.21 [Rang einer Matrix].
Sei A
∈ Km×n .
Die maximale Anzahl von linear unabhängigen
Spalten in A heiÿt Rang der Matrix, und wird mit rg(A) bezeichnet.
Satz 6.22.
Sei A
∈ Km×n .
Dann gilt rg(A)
= rg(A| ),
d.h. die maximale
Anzahl linear unabhängiger Spalten einer Matrix ist gleich der
maximalen Anzahl linear unabhängiger Zeilen.
Lineare Abbildungen und Matrizen
Math4Inf
148 / 567
Satz 6.23.
: Kn → Km mit f (x) = A x,
rg(A) = dimK Bild(f ), und es ist
Sei f
Kern(f )
Satz 6.24.
Sei A
∈ Km×n ,
und sei L
∈ Km×n .
Dann ist
= {x ∈ Kn : A x = 0}.
= {x ∈ Kn : A x = 0}.
dimK L
Lineare Abbildungen und Matrizen
A
Dann ist
= n − rg(A).
Math4Inf
149 / 567
Denition 6.25 [Skalarprodukt].
Sei V ein
K-Vektorraum
h·, ·i : V × V → K heiÿt
und λ, µ ∈ K gilt
i)
ii)
iii)
hx, xi > 0
falls
hx, yi = hy, xi
mit
K ⊆ C.
Eine Abbildung
Skalarprodukt, falls für alle
x 6= 0
x, y , v ∈ V
(Positivität),
(Symmetrie),
hλ x + µ y, vi = λ hx, vi + µ hy, vi
(Linearität im ersten
Argument).
Lineare Abbildungen und Matrizen
Math4Inf
150 / 567
Denition 6.26.
i) Unter dem Standardskalarprodukt im
hx, yi = x| y =
für
n
X
i =1
versteht man
xi yi ,
x = (x1 , . . . , xn )| , y = (y1 , . . . , yn )| ∈ Rn .
ii) Unter dem Standardskalarprodukt im
hx, yi = x| y =
für
Rn
Cn
n
X
i =1
versteht man
xi yi ,
x = (x1 , . . . , xn )| , y = (y1 , . . . , yn )| ∈ Cn .
Lineare Abbildungen und Matrizen
Math4Inf
151 / 567
Bemerkung 6.27.
Im
Rn
ist das Skalarprodukt auch linear im zweiten Argument, d.h.
es gilt
hx, λ y + µ vi = λ hx, yi + µ hx, vi,
Hingegen gilt im
x, y, v ∈ Rn , λ, µ ∈ R.
für alle
x, y, v ∈ Cn , λ, µ ∈ C.
Cn
hx, λ y + µ vi = λ hx, yi + µ hx, vi,
Lineare Abbildungen und Matrizen
für alle
Math4Inf
152 / 567
Denition 6.28 [Norm].
Sei V ein
h·, ·i.
K-Vektorraum, K = R
oder
K = C,
Die Länge oder die Norm eines Vektors
kv k =
p
mit Skalarprodukt
v∈V
ist deniert als
hv, vi.
Satz 6.29.
Für
v , w ∈ Rn
gilt
hv, wi = kvk kwk cos φ,
wobei
φ ∈ [0, π]
der von
v
und
w
eingeschlossene Winkel ist.
Korollar 6.30 [Cauchy -Schwarz -Ungleichung].
19
Sei V ein
h·, ·i
K-Vektorraum, K = R
k · k.
und zugehöriger Norm
20
oder
K = C,
mit Skalarprodukt
Dann gilt
|hx, yi| ≤ kxk kyk
Lineare Abbildungen und Matrizen
Math4Inf
153 / 567
Bemerkung 6.31.
Insbesondere gilt für x1 , . . . , xn , y1 , . . . , yn
|x1 y1 + · · · + xn yn | ≤
q
∈ R:
q
2
2
x1 + · · · + xn2
y1 + · · · + yn2
mit Gleichheit dann und nur dann, wenn die Vektoren
(x1 , . . . , xn )| , (y1 , . . . , yn )| ∈ Rn
linear abhängig sind.
Bemerkung 6.32.
Sei V ein
h·, ·i
i)
und
K-Vektorraum, K = R
zugehöriger Norm k · k.
kxk ≥ 0
oder
K = C,
mit Skalarprodukt
Dann gilt
x ∈ V , wobei Gleichheit dann und nur dann
x = 0.
kλ xk = |λ| kxk für alle x ∈ V , λ ∈ K.
kx + yk ≤ kxk + kyk für alle x, y ∈ V (Dreiecksungleichung).
für alle
gilt, wenn
ii)
iii)
Lineare Abbildungen und Matrizen
Math4Inf
154 / 567
Denition 6.33 [Polarkoordinaten].
i) Jedes
x = (x1 , x2 )| ∈ R2 \ {0}
als
x = kx k
mit cos φ
= x1 /kxk
x=
und sin φ
(x1 , x2 , x3 )|
lässt sich eindeutig darstellen
cos φ
sin φ
= x2 /kxk.
3
∈ R \ {0} lässt sich eindeutig
sin ψ cos φ
x = kxk sin ψ sin φ
cos ψ
q
q
2
2
2
2
mit cos φ = x1 /
x1 + x2 , sin φ = x2 /
x1 + x2 , und
cos ψ = x3 /kxk und ψ ∈ [0, π].
ii) Jedes
darstellen als
Diese Darstellungen eines Vektors nennt man Darstellung in
Polarkoordinaten.
Lineare Abbildungen und Matrizen
Math4Inf
155 / 567
Beispiel 6.34 [Rotation im R ].
3
Sei
v ∈ R 3 \ { 0}
mit
sin ψ cos φ
v = sin ψ
sin φ .
cos ψ
Die Rotation um die Achse
{λ v : λ ∈ R}
mit Winkel
θ
lässt sich
durch die folgenden Rotationen beschreiben:
i) Man drehe die Rotationsachse so, dass sie mit der
x3 -Koordinaten-Achse übereinstimmt,
ii) Man wende die Rotation mit Winkel
θ
um die x3 -Achse an,
iii) Man drehe die Rotationsachse wieder zurück in die
Ausgangsposition.
Man erhält so die Abbildung:
(rote3 ,φ ◦ rote2 ,−ψ ) ◦ rote3 ,θ ◦ (rote2 ,ψ ◦ rote3 ,−φ ) .
Lineare Abbildungen und Matrizen
Math4Inf
156 / 567
Denition 6.35 [Orthogonale Vektoren].
Sei V ein
h·, ·i.
K-Vektorraum, K = R oder K = C, mit Skalarprodukt
v, w ∈ V heiÿen orthogonal, wenn hv, wi = 0.
Zwei Vektoren
Bemerkung 6.36.
Sei V ein
h·, ·i,
und
K-Vektorraum, K = R oder K = C,
sei u ∈ V , u 6= 0. Dann ist
U
mit Skalarprodukt
= {w ∈ V : hu, wi = 0}
Teilraum von V .
Denition 6.37 [Orthogonale Projektion].
K-Vektorraum, K = R oder K = C, mit Skalarprodukt
u ∈ V , u 6= 0. Unter der orthogonalen Projektion auf
den Teilraum U = {w ∈ V : hu, wi = 0} versteht man die
Abbildung f : V → U mit
Sei V ein
h·, ·i,
und sei
f
Lineare Abbildungen und Matrizen
(v) = v −
hv, ui
u.
kuk2
Math4Inf
157 / 567
Bemerkung 6.38.
Orthogonale Projektionen sind lineare Abbildungen mit Matrix
In
−
1
kuk2
u u| .
Bemerkung 6.39.
Sei V
= Rn , a ∈ V , a 6= 0,
und sei
α ∈ R.
Der Abstand zwischen
der Hyperebene
a, α) = {x ∈ Rn : ha, xi = α}
H(
und einem Punkt
v∈V
ist gleich
|ha, vi − α|
.
kak
Lineare Abbildungen und Matrizen
Math4Inf
158 / 567
Denition 6.40 [Orthonormal-system, -basis].
K-Vektorraum, K = R oder K = C, mit Skalarprodukt
u1 , . . . , un ∈ V bilden ein Orthonormalsystem,
1 ≤ i, j ≤ n
(
0, i 6= j ,
hui , uj i = δi ,j , mit δi ,j =
1, i = j .
Sei V ein
h·, ·i.
Die Vektoren
falls für
δ i ,j
heiÿt Kronecker-Symbol. Bilden
u1 , . . . , un
zudem eine Basis
von V , dann heiÿt diese Basis Orthonormalbasis von V .
Bemerkung 6.41.
i) Vektoren in einem Orthonormalsystem sind linear unabhängig.
ii)
e1 , . . . , en
sind eine Orthonormalbasis in
Lineare Abbildungen und Matrizen
Math4Inf
Rn ,
bzw.
Cn .
159 / 567
Satz 6.42 [Gram -Schmidt -Verfahren].
21
22
K-Vektorraum, K = R oder K = C, mit
h·, ·i, und seien a1 , . . . , am ∈ V linear unabhängig.
k = 1, . . . , m sei
Sei V ein
uk = ak −
Dann bilden die Vektoren
k −1
X
huj , ak i
j =1
kuj k2
Skalarprodukt
Für
uj .
u1
um
ku1 k , . . . , kum k ein Orthonormalsystem,
≤k ≤m
uk
u1
,...,
= lin {u1 , . . . , uk }
ku1 k
ku k k
= lin {a1 , . . . , ak }.
und es gilt für 1
lin
21 Jorgen Pedersen Gram, 18501916
22 Ehrhart Schmidt, 18761959
Lineare Abbildungen und Matrizen
Math4Inf
160 / 567
Denition 6.43 [Orthogonale Matrix/Transformation].
Eine Matrix U
∈ Rn × n
heiÿt orthogonale Matrix, falls U
|
= U −1 ,
d.h
U
|
U
= U U | = In .
Die zugehörige lineare Abbildung f
:V →V
mit f
(x) = U x
heiÿt
orthogonale Transformation.
Satz 6.44.
Sei U
∈ Rn × n
eine orthogonale Matrix. Dann gilt für alle
v , w ∈ Rn
hU v, U wi = hv, wi.
Satz 6.45.
Sei U
∈ Rn × n .
Dann sind die folgenden Aussagen äquivalent:
i) U orthogonal,
ii) U | ist orthogonal,
iii) Die Spalten von U (und somit auch die Zeilen) bilden eine
Orthonormalbasis des
Lineare Abbildungen und Matrizen
Rn .
Math4Inf
161 / 567
Denition 6.46 [Homogene Koordinaten].
Jedem Punkt
x = (x1 , . . . , xn )| ∈ Rn
wird der Punkt im
x.
Beim Rechnen mit
Rn + 1
mit
|
den Koordinaten (x1 , . . . , xn , 1) zugeordnet. Diese Koordinaten
heiÿen homogene Koordinaten von
homogenen Koordinaten wird jedem Punkt
(x1 , . . . , xn , xn+1 )| ∈ Rn+1 , xn+1 6= 0, der Punkt
(x1 /xn+1 , . . . , xn /xn+1 )| ∈ Rn zugeordnet.
Beispiel 6.47.
(−1, 2)| ∈ R2 entspricht in
|
3
Punkt (−1, 2, 1) ∈ R , bzw. den
Der Punkt
homogenen Koordinaten
dem
Punkten
(−λ, 2λ, λ)| ∈ R3 ,
λ 6= 0.
Lineare Abbildungen und Matrizen
Math4Inf
162 / 567
Bemerkung 6.48.
a = (a1 , a2 )| ∈ R2 . Die Translation Ta : R2 → R2 um a
mit Ta (x) = x + a lässt sich in homogenen Koordinaten
i) Sei
darstellen als
1
0
0
1
+ t1
t2 · x2 = x2 + t2 .
0
0
1
ii) Die Rotation rotθ
t1
: R2 → R2
x1
x1
1
1
um den Ursprung mit Winkel
θ
lässt sich in homogenen Koordinaten darstellen als
cos θ
sin θ
0
Lineare Abbildungen und Matrizen
− sin θ x2
0 · x2 = sin θ x1 + cos θ x2 .
− sin θ
cos θ
0
0
1
x1
cos θ x1
1
1
Math4Inf
163 / 567
iii) Die Rotation um den Punkt
v = (v1 , v2 )|
mit Winkel
θ
lässt
sich in homogenen Koordinaten darstellen als
cos θ
1
0
v1
0
1
v2 sin θ
0
0
1
− sin θ
cos θ
0
0
0
1
0
0 0
1
1
0
0
−v1
x1
−v2 · x2
1
1
cos θ − sin θ − cos θ v1 + sin θ v2 + v1
x1
= sin θ cos θ − sin θ v1 − cos θ v2 + v2 · x2 .
0
0
1
1
a = (a1 , a2 , a3 )| ∈ R3 . Die Translation Ta : R3 → R3 um
a mit Ta (x) = x + a lässt sich in homogenen Koordinaten
iv) Sei
darstellen als
1
0
0
0
0
1
0
0
1
0
0
0
Lineare Abbildungen und Matrizen
+ a1
a2 x2
· = x2 + a2 .
a3
x3
x3 + a3
a1
1
x1
1
x1
1
Math4Inf
164 / 567
v) Die Rotation um die x3 -Achse mit Winkel
θ
lässt sich mittels
homogenen Koordinaten darstellen als
cos θ
sin θ
0
− sin θ
cos θ
0
0
1
− sin θ x2
0 x2
· = sin θ x1 + cos θ x2 .
x3
0 x3
0
0
1
0
0
0
x1
1
cos θ x1
1
Entsprechend lassen sich die Rotationen um die x1 - oder
x2 -Achse darstellen. Mittels Verknüpfungen von Rotationen
und Translationen lassen sich somit Rotationen um beliebige
Achsen durch Matrixmultiplikationen ausdrücken.
Lineare Abbildungen und Matrizen
Math4Inf
165 / 567
Determinanten und Eigenwerte
Notation 7.1.
× n-Matrix A ∈ Kn×n und i , j ∈ {1, . . . , n} bezeichnet
i
j
(
n
−
1)×(n−1)
A ∈ K
die (n − 1) × (n − 1) Matrix, die aus A durch
Für eine n
Streichen der i -ten Zeile und j -ten Spalte entsteht.
Denition 7.2 [Determinante, Entwicklungssatz von
Laplace ].
23
= (ai j ) ∈ Kn×n . Die Determinante
det(A), ist eine Zahl aus K, die wie folgt
Sei A
i) Ist n
= 1,
so ist det(A)
von A, bezeichnet mit
rekursiv deniert ist:
= a1 1 .
> 1 und
n einen Zeilenindex i ∈ {1, . . . , n} ist
X
det(A) =
(−1)i +j · ai j · det(Ai j )
j =1
= (−1)i +1 ai 1 det(Ai 1 ) + · · · + (−1)i +n ai n
ii) Für n
i n ).
det(A
(Entwicklung nach der i -ten Zeile)
23 Pierre-Simon Laplace, 1749-1827
Determinanten und Eigenwerte
Math4Inf
166 / 567
Beispiel 7.3.
i) Für A
=
a1 1
a1 2
a2 1
a2 2
ist
det(A)
= a1 1 a2 2 − a1 2 a2 1 .
Dies entspricht dem (orientierten) Flächeninhalt des von den
Spaltenvektoren aufgespannten Parallelogramms.
ii) Sei A
i
2
1
3
= 4
0
5. Entwicklung nach der 2-ten Zeile (also
7
6
8
= 2)
ergibt
det(A) = (−1)2+1 4 det(A2 1 ) + (−1)2+2 0 det(A2 2 ) + (−1)2+3 5 det(A2 3 )
1 3
2 1
= −4 det
− 5 det
6 8
7 6
= −4 (8 − 18) − 5 (12 − 7) = 40 − 25 = 15.
Determinanten und Eigenwerte
Math4Inf
167 / 567
Satz 7.4.
∈ Kn×n
= det(A| ).
Insbesondere kann det(A) auch durch Entwicklung nach
Spalte berechnet werden, d.h. für j ∈ {1, . . . , n } ist
Für A
ist det(A)
det(A)
=
n
X
i =1
(−1)i +j ai j
der j -ten
i j ).
det(A
Beispiel 7.5.
Sei A
j
0
1
3
= 1
2
5
.
2
5
13
= 1)
Entwicklung nach der 1-ten Spalte (also
ergibt
det(A) = (−1)1+1 0 det(A1 1 ) + (−1)2+1 1 det(A2 1 ) + (−1)3+1 2 det(A3 1 )
1 3
1 3
= −1 det
+ 2 det
5 13
2 5
= − (13 − 15) + 2 (5 − 6) = 0.
Determinanten und Eigenwerte
Math4Inf
168 / 567
Satz 7.6 [Eigenschaften der Determinante].
i) Die Determinante einer (oberen oder unteren) Dreiecksmatrix
ist gleich dem Produkt ihrer Diagonalelemente. Insbesondere
ist det(In )
= 1.
ii) Die Determinante ist alternierend, d.h. bei Vertauschen zweier
Zeilen ändert sich das Vorzeichen der Determinante.
Determinanten und Eigenwerte
Math4Inf
169 / 567
iii) Die Determinante ist linear in jeder Zeile, d.h. seien
a1 , . . . , an ∈ Kn
Zeilenvektor,
Zeilenvektoren und sei
λ ∈ K.
a1
v
ein weiterer
Dann ist
a1
an
an
a1
..
..
..
.
.
.
det ai + v = det ai + det v
..
..
..
.
.
.
an
und
a1
..
.
det λ ai = λ
..
.
an
Determinanten und Eigenwerte
a1
..
.
ai .
..
.
an
Math4Inf
170 / 567
Bemerkung 7.7.
Wegen det(A)
= det(A| )
gelten die Eigenschaften ii) und iii) aus
Satz 7.6 auch, wenn man Zeile durch Spalte ersetzt.
Korollar 7.8.
Sei A
∈ Kn×n
und
λ ∈ K.
i) Enthält A eine Zeile (Spalte) mit lauter Nullen, dann ist
det(A)
= 0.
ii) Enthält A zwei gleiche Zeilen (Spalten), dann ist det(A)
iii) Addition des
λ-fachen
= 0.
einer Zeile (Spalte) zu einer anderen
Zeile (Spalte) ändert die Determinante nicht.
iv) Sind die Zeilen (Spalten) von A linear abhängig, dann ist
det(A)
= 0.
v) det(λ A)
= λn det(A).
Determinanten und Eigenwerte
Math4Inf
171 / 567
Bemerkung 7.9.
Aufgrund von Satz 7.6 i),ii) und Korollar 7.8 iii) lässt sich die
Determinante auch berechnen, indem man die Matrix mit dem
Gauÿ-Algorithmus auf Dreiecksform (Zeilenstufenform) bringt.
Beispiel 7.10.
Sei A
2
1
3
= 4
0
5.
7
6
8
2
1
3
4
0
5
7
6
8
Also det(A)
2
1
3
2
1
3
→ 0 −2 −1 → 0 −2 −1
5
− 52
0
0
0
− 15
2
4
= 2 · (−2) · (−15/4) = 15.
Determinanten und Eigenwerte
Math4Inf
172 / 567
Satz 7.11.
Für A
∈ Kn×n
sind die folgenden Aussagen äquivalent:
i) A ist regulär (invertierbar).
ii) Die Zeilen (Spalten) von A sind linear unabhängig.
iii) rg(A)
= n.
iv) det(A)
6= 0.
Satz 7.12.
Seien A, B
∈ Kn×n .
Dann ist det(A
· B ) = det(A) · det(B ).
Korollar 7.13.
∈ Kn×n regulär. Dann ist det(A−1 ) = det1(A) .
n×n orthogonal. Dann ist | det(U )| = 1.
U ∈ K
i) Sei A
ii) Sei
Bemerkung 7.14.
∈ Kn×n . Im Allgemeinen
det(A + B ) 6= det(A) + det(B ).
Seien A, B
Determinanten und Eigenwerte
ist
Math4Inf
173 / 567
Denition 7.15 [Eigenwert, Eigenvektor].
Sei A
∈ Kn×n . λ ∈ K
linearen Abbildung A
u 6= 0,
heiÿt Eigenwert der Matrix A (bzw. der
: Kn → Kn ),
gibt, so dass
A
u
wenn es einen Vektor
u ∈ Kn ,
u = λ u.
heiÿt Eigenvektor zum Eigenwert
λ.
Beispiel7.16.
Sei A
=
0
1
1
0
(Spiegelung an der 45-Grad Achse). 1 und
−1
sind die Eigenwerte von A. Die Eigenvektoren zum Eigenwert 1 sind
alle Vektoren der Form
Eigenwert
−1
Determinanten und Eigenwerte
(α, α)| , α 6= 0.
Die Eigenvektoren zum
sind alle Vektoren der Form
(−α, α)| , α 6= 0.
Math4Inf
174 / 567
Bemerkung 7.17.
∈ Kn×n . λ ∈ K
u 6= 0 ∈ Kn gibt mit
Sei A
ist Eigenwert von A genau dann, wenn es
(A − λ In ) u = 0,
d.h. falls die Spaltenvektoren von A
− λ In linear abhängig
− λ In ) = 0.
sind, was
wiederum äquivalent dazu ist, dass det(A
Denition 7.18 [Charakteristisches Polynom].
Sei A
∈ Kn×n .
Dann ist
χA (λ) = det(A − λ In )
ein Polynom vom Grad n in
λ.
Es heiÿt das charakteristische
Polynom von A. Die Nullstellen
λ∈K
von
χA (λ)
sind die
Eigenwerte von A.
Determinanten und Eigenwerte
Math4Inf
175 / 567
Beispiel 7.19.
i) Sei A
=
0
1
1
0
. Dann ist
χA (λ) = det(A − λ I2 ) = det
−λ
1
1
−λ
= λ2 − 1 = (λ + 1)(λ − 1).
Die Eigenwerte von A sind 1 und
ii) Sei A
= In .
−1.
Dann ist
χA (λ) = det(In − λ In ) = (1 − λ)n .
Eigenwert von In ist nur 1.
Determinanten und Eigenwerte
Math4Inf
176 / 567
Satz 7.20.
Sei A
= (ai j ) ∈ Kn×n
und sei
χA (λ) = det(A − λ In ) = an λn + an−1 λn−1 + · · · + a1 λ + a0 ,
∈ K. Dann ist an = (−1)n , a0 = det(A)
= (−1)n−1 (a1 1 + a2 2 + · · · + an n ).
mit ai
an − 1
und
Denition 7.21 [Spur].
Sei A
= (ai j ) ∈ Kn×n .
Die Summe der Diagonalelemente von A
heiÿt Spur der Matrix A und wird mit tr(A) bezeichnet, d.h.
tr(A)
=
n
X
i =1
ai
i.
Bemerkung 7.22.
A und A
| haben das gleiche charakteristische Polynom.
Determinanten und Eigenwerte
Math4Inf
177 / 567
Bemerkung 7.23.
Sei A
∈ Kn×n ,
λ ∈ K Eigenwert von A. u 6= 0
Eigenwert λ genau dann, wenn
und sei
Eigenvektor zum
ist
(A − λ In ) u = 0.
Somit ist die Menge aller Eigenvektoren zum Eigenwert
λ
gegeben
durch die von Null verschiedenen Lösungen des homogenen
(A − λ In ) x = 0,
− λ In ) \ {0} ist.
Gleichungssystems
Menge Kern(A
was wiederum gleich der
Denition 7.24 [Eigenraum].
Sei A
∈ Kn×n ,
und sei
λ∈K
Eigenwert von A. Kern(A
d.h. die Menge aller Eigenvektoren zum Eigenwert
Nullvektor), heiÿt Eigenraum zum Eigenwert
Determinanten und Eigenwerte
Math4Inf
λ
− λ In ),
(plus den
λ.
178 / 567
Bemerkung 7.25 [Bestimmen der Eigenwerte und
Eigenräume/-vektoren].
Sei A
∈ Kn×n .
χA (λ).
λ1 , . . . , λk ∈ K von χA (λ).
i) Berechne das charakteristische Polynom
ii) Bestimme alle Nullstellen
iii) Für
λ1 , . . . , λ k
bestimme man die Eigenräume, d.h.
Kern(A − λi In ), 1
Determinanten und Eigenwerte
≤ i ≤ k.
Math4Inf
179 / 567
Beispiel7.26.
Sei A
=
0
1
1
0
λ1 = 1
. A hat die beiden Eigenwerte
und
λ2 = −1.
• λ1 = 1.
In diesem Fall ist A
− λ 1 I2 =
Kern(A − λ1 I2 )
=
x∈R :
2
−1
1
1
−1
−1
1
1
−1
, und
x=0
= {(α, α)| : α ∈ R}.
• λ2 = −1.
In diesem Fall ist A
Kern(A − λ2 I2 )
=
− λ 2 I2 =
x∈R :
2
1
1
1
1
1
1
1
1
, und
x=0
= {(−α, α)| : α ∈ R}.
Determinanten und Eigenwerte
Math4Inf
180 / 567
Denition 7.27 [Algebraische und Geometrische
Vielfachheit].
∈ Kn×n ,
λ1 ∈ K Eigenwert von A. Sei m ∈ N die
(λ − λ1 )m ein Teiler von χA (λ) ist.
m heiÿt algebraische Vielfachheit von λ1 , und
dimK Kern(A − λ1 In ) heiÿt geometrische Vielfachheit von λ1 .
Sei A
und sei
gröÿte Potenz, so dass
Beispiel 7.28.
i) Sei A
=
0
1
1
0
.
λ1 = 1
und
λ2 = −1
haben jeweils die
algebraische und geometrische Vielfachheit 1.
ii) Sei A
= In .
Der einzige Eigenwert
λ1 = 1
hat die geometrische
und algebraische Vielfachheit n.
iii) Sei A
=
1
1
0
1
. Dann ist
χA (λ) = (1 − λ)2 ,
und
λ1 = 1
ist
der einzige Eigenwert mit algebraischer Vielfachheit 2. Die
geometrische Vielfachheit ist aber nur 1.
Determinanten und Eigenwerte
Math4Inf
181 / 567
Denition 7.29 [Ähnliche Matrizen].
Zwei Matrizen A, B
Matrix C
∈ Kn×n
∈ Kn×n
heiÿen ähnlich, falls es eine reguläre
gibt mit
B
= C −1 A C .
Bemerkung 7.30.
Seien A, B
∈ Kn×n
C
reguläre. Dannist für m
∈ Kn×n
ähnliche Matrizen und B
= C −1 A C
mit
∈N
m = C −1 Am C .
B
Satz 7.31.
Ähnliche Matrizen haben das gleiche charakteristische Polynom.
Denition 7.32 [Diagonalisierbarkeit].
Eine Matrix A
∈ Kn×n
heiÿt diagonalisierbar, falls es eine reguläre Matrix C
so dass C
: Kn → Kn )
∈ Kn×n gibt,
(bzw. eine lineare Abbildung A
−1 A C eine Diagonalmatrix ist, d.h. A ist ähnlich zu einer
Diagonalmatrix.
Determinanten und Eigenwerte
Math4Inf
182 / 567
Satz 7.33.
Eigenvektoren zu verschiedenen Eigenwerten sind linear unabhängig.
Satz 7.34.
Sei A
∈ Kn×n .
Dann sind die folgenden Aussagen äquivalent:
i) A ist diagonalisierbar.
ii) Es gibt eine Basis des
Kn
bestehend aus Eigenvektoren von A.
χA (λ) zerfällt über K in
λ1 , . . . , λk , λi 6= λj für i 6= j ,
iii) Das charakteristische Polynom
Linearfaktoren, d.h. es gibt
mi
∈N
und
mit
χA (λ) = (−1)n (λ − λ1 )m1 · (λ − λ2 )m2 · . . . · (λ − λk )m ,
k
und mi
= dimK Kern(A − λi In ),
1
≤ i ≤ k ,d.h.
die
algebraische Vielfachheit ist gleich der geometrischen
Vielfachheit für alle Eigenwerte.
Determinanten und Eigenwerte
Math4Inf
183 / 567
Bemerkung 7.35.
Sei A
∈ Kn×n
diagonalisierbar mit Eigenwerten
algebraischen Vielfachheiten m1
det(A)
tr(A)
. . . , mk .
λ 1 . . . , λk
und
Dann ist
1 · λ m2 · . . . · λ m ,
= λm
1
2
k
k
= m1 λ1 + m2 λ2 + . . . + mk λk .
Bemerkung 7.36.
Sei U
∈ Kn×n ,
K
=R
oder K
gilt für jeden Eigenwert
λ
= C,
eine orthogonale Matrix. Dann
von U
|λ| = 1.
Determinanten und Eigenwerte
Math4Inf
184 / 567
Denition 7.37 [Stochastische Matrix,
Markov -Matrix].
24
Eine Matrix A
= (ai j ) ∈ Rn×n
heiÿt stochastische Matrix oder
Markov-Matrix falls
i) alle Einträge nichtnegativ sind, d.h. ai j
≥ 0,
1
≤ i , j ≤ n,
und
ii) die Summer der Einträge in jeder Spalte gleich eins ist, d.h.
Pn
i = 1 ai j = 1
für 1
≤ j ≤ n.
Satz 7.38.
Sei A eine stochastische Matrix. Alle Eigenwerte von A sind von
Betrag kleiner gleich 1, und sie hat immer den Eigenwert 1. Zum
Eigenwert 1 gibt es immer einen Eigenvektor mit nichtnegativen
Komponenten.
24 Andrej Andrejewitsch Markov, 18561922
Determinanten und Eigenwerte
Math4Inf
185 / 567
Satz 7.39.
∈ Rn × n
Jede symmetrische Matrix A
gibt sogar eine Orthonormalbasis des
ist diagonalisierbar, und es
Rn
bestehend aus
Eigenvektoren von A. Insbesondere gibt es eine orthogonale Matrix
U , so dass U
| A U eine Diagonalmatrix ist.
Denition 7.40 [Positiv (negativ) denit].
Sei A
∈ Rn × n
symmetrisch. A heiÿt positiv denit, falls
Ist hingegen
x| A x > 0
für alle
x ∈ Rn \ {0}.
x| A x < 0
für alle
x ∈ Rn \ {0},
dann heiÿt A negativ denit.
Gilt statt
>
nur
≥ 0,
bzw. statt
<
nur
≤,
so heiÿen die Matrizen
positiv semi-denit, bzw. negativ semi-denit.
Determinanten und Eigenwerte
Math4Inf
186 / 567
Satz 7.41.
Eine symmetrische Matrix A ist genau dann positiv (negativ)
denit, wenn alle Eigenwerte von A positiv (negativ) sind.
Satz 7.42 [Hurwitz -Kriterium].
25
Eine symmetrische n
positiv denit, wenn
× n-Matrix A = (ai j ) ∈ Rn×n
für 1 ≤ m ≤ n gilt:
m det (ai j )i ,j =1 > 0.
25 Adolf Hurwitz, 1859-1919
Determinanten und Eigenwerte
Math4Inf
ist genau dann
187 / 567
Teil II
Mathematik II
Math4Inf
188 / 567
Gruppen, Ringe, Körper
Denition 8.1 [Gruppe (vergl. Def. 3.36)].
⊗:G ×G →G
Sei G eine nichtleere Menge, und sei
(x , y ) 7→ x ⊗ y eine Abbildung
(G , ⊗) heiÿt Gruppe, wenn die
mit
(Verknüpfung).
folgenden Bedingungen 1.3. erfüllt
sind:
1. Für alle x , y , z
∈G
gilt:
(x ⊗ y ) ⊗ z = x ⊗ (y ⊗ z )
(Assoziativgesetz).
2. Es gibt ein neutrales Element e
gilt: e
•
⊗
so dass für alle x
∈G
⊗ x = x ⊗ e = x.
3. Zu jedem x
x
∈ G,
0
x
=
0
x
∈ G gibt es ein inverses Element x 0 ∈ G , so
⊗ x = e . x 0 wird auch mit x −1 bezeichnet.
Gilt zusätzlich x
(G , ⊗)
⊗y =y ⊗x
für alle x , y
26
kommutative (abelsche
26 Niels Abel, 18021829
Gruppen, Ringe, Körper
∈ G,
dass
dann heiÿt
) Gruppe.
Math4Inf
189 / 567
Beispiel 8.2.
• (Z, +), (Q, +), (R, +)
sind kommutative Gruppen mit
neutralem Element 0, und für a ist
−a
das inverse Element.
• (Q \ {0}, ·) ist kommutative Gruppe mit neutralem Element
und für a ∈ Q \ {0} ist 1/a das inverse Element. Ebenso ist
(R \ {0}, ·) kommutative Gruppe.
• (Sn , ◦)
ist Gruppe mit neutralem Element id{1,...,n} , und das
inverse Element von
σ ∈ Sn
ist durch die Umkehrabbildung
gegeben. Sn ist nicht kommutativ für n
• (Zm , ⊕)
∈ Zm
• (Z4 \ {[0]4 }, )
ist
[−a]m = [m − a]m
ist keine Gruppe, aber
kommutative Gruppe.
• (Kn , +)
≥ 3.
ist kommutative Gruppe mit neutralem Element [0]m ,
und für [a]m
(also insbesondere
(Rn , +))
• GL(n, R) = {A ∈ Rn×n : det A 6= 0}
üblichen Matrizenmultiplikation.
Gruppen, Ringe, Körper
1,
Math4Inf
das inverse Element.
(Z5 \ {[0]5 }, )
ist
ist eine abelsche Gruppe.
ist eine Gruppe mit der
190 / 567
Satz 8.3.
Sei
(G , ⊗)
eine Gruppe, und seien x , y
i) Es gibt genau ein g
mit h
∈G
∈ G.
⊗g =y
mit x
und genau ein h
∈G
⊗ x = y.
ii) Es gilt (x
⊗ y )−1 = y −1 ⊗ x −1 .
Denition 8.4 [Untergruppe].
Sei
(G , ⊗)
Gruppe. Eine nichtleere Teilmenge U
⊆ G heiÿt
⊗ die
Untergruppe von G , falls U mit der Verknüpfung
Gruppeneigenschaften erfüllt.
(U , ⊗)
Gruppe. In diesem Falle schreibt man
U
ist also selbst wieder eine
(U , ⊗) ≤ (G , ⊗),
bzw. nur
≤ G.
Satz 8.5 [Untergruppenkriterium (vergl. Satz 5.6)].
Sei
(G , ⊗)
G , falls U
Gruppen, Ringe, Körper
Gruppe und U
6= ∅
und x
⊗
⊆ G . U ist genau dann Untergruppe
∈ U für alle x , y ∈ U .
von
−1
y
Math4Inf
191 / 567
Beispiel 8.6.
•
∈ N und mZ = {m · z : z ∈ Z}.
(mZ, +) ≤ (Z, +).
•
Jeder lineare Teilraum (Untervektorraum) von
Sei m
n
Untergruppe von (R , +).
• SL(n, R) = {A ∈ Rn×n : | det A| = 1}
GL(n, R).
Gruppen, Ringe, Körper
Math4Inf
Dann ist
Rn
ist eine
ist eine Untergruppe von
192 / 567
Notation 8.7.
•
Sei
(G , ⊗) Gruppe mit neutralem Element e , und sei
∈ Z versteht man unter
: k ≥ 1,
|x ⊗ x ⊗
{z· · · ⊗ x}
k −mal
k
x =
e
: k = 0,
−
1
−
1
−
1
x
⊗ x {z
⊗ · · · ⊗ x } : k ≤ −1.
|
k −mal
x
∈ G.
Für k
•
Für x
∈G
sei
< x >= {x k : k ∈ Z}.
Bemerkung 8.8.
Sei
(G , ⊗)
Gruppen, Ringe, Körper
Gruppe und x
∈ G.
Dann ist
< x >≤ G .
Math4Inf
193 / 567
Denition 8.9 [Zyklische Gruppe].
Eine Gruppe G heiÿt zyklisch, falls ein x
G
=< x >,
d.h. es gibt ein Element x
∈G
∈ G,
existiert mit
welches die Gruppe
erzeugt.
Beispiel 8.10.
• Z =< 1 >, Zm =< [1]m >.
• (Z5 \ {[0]5 }, ) =< [2]5 > (vergl. Satz 3.40)
• {2k : k ∈ Z} =< 2 > ist eine zyklische Untergruppe
von
(Q, ·).
Gruppen, Ringe, Körper
Math4Inf
194 / 567
Denition 8.11 [(Gruppen)-Homomorphismus].
Seien
(G , ⊗)
und
(H , )
Gruppen. Eine Abbildung
φ(x ⊗ y ) = φ(x ) φ(y )
für alle x , y
φ:G →H
∈G
heiÿt Gruppenhomomorphismus (kurz: Homomorphismus). Ist
bijektiv, dann heiÿt
φ
mit
φ
Gruppenisomorphismus (kurz:
Isomorphismus). In diesem Falle heiÿen G und H isomorph
zueinander und man schreibt G
∼
= H.
Ist eH das neutrale Element von H , so heiÿt
Kern(φ)
der Kern von
= {x ∈ G : φ(x ) = eH }
φ.
Beispiel 8.12.
Eine lineare Abbildung von
Kn → Km
ist insbesondere ein
Gruppenhomomorphismus bzgl. den Gruppen
Gruppen, Ringe, Körper
Math4Inf
(Kn , +)
und
(Km , +).
195 / 567
Satz 8.13.
Seien
(G , ⊗)
(H , ) Gruppen mit neutralen Elementen eG
sei φ : G → H ein Gruppenhomomorphismus.
und
eH . Desweiteren
und
Dann gilt
i)
ii)
φ(eG ) = eH .
φ(x −1 ) = (φ(x ))−1
iii) Ist U
auch
φ
∈ G.
≤ G , dann ist auch φ(U ) ≤ φ(G ).
φ−1 (V ) ≤ G (Urbild von V ).
iv) Kern(φ)
v)
für alle x
≤ H,
dann ist
≤ G.
ist injektiv genau dann wenn Kern(φ)
Gruppen, Ringe, Körper
Ist V
Math4Inf
= {eG }.
196 / 567
Denition 8.14 [Ordnung einer Gruppe / eines
Elements].
Sei
(G , ⊗)
eine Gruppe. Die Anzahl der Elemente von G ,
bezeichnet mit |G |, heiÿt die Ordnung der Gruppe (unendlich
möglich). Für x
∈G
heiÿt
|<x >|
die Ordnung von x .
Beispiel 8.15.
• |Z| = ∞
• |Zm | = m,
und in
Z6
ist
| < [2]6 > | = 3.
Bemerkung 8.16.
Sei
(G , ⊗) Gruppe mit
∈ G . Dann ist
neutralem Element eG . Sei |G | endlich und
sei x
| < x > | = min{n ∈ N : x n = eG }.
Gruppen, Ringe, Körper
Math4Inf
197 / 567
Bemerkung 8.17.
i) Jede Gruppe der Ordnung n ist isomorph zu einer Untergruppe
von Sn .
ii) Sei (G , ⊗) eine zyklische Gruppe. Ist |G |
= m, dann ist
∼
(G , ⊗) = (Zm , +), und ist |G | = ∞, dann ist (G , ⊗) ∼
= (Z, +).
In Worten: Zm und Z sind die einzigen zyklischen Gruppen.
Gruppen, Ringe, Körper
Math4Inf
198 / 567
Denition 8.18 [Nebenklassen].
Sei
(G , ⊗)
Gruppe, und sei U
≤G
Untergruppe von G . Die
Relation R auf G mit
xRy
⇔ x −1 ⊗ y ∈ U
(⇔ y ∈ x U )
ist eine Äquivalenzrelation (vergl. Def. 2.5). Hierbei ist
xU
= {x ⊗ u : u ∈ U }.
Die durch diese Äquivalenzrelation
denierten Äquivalenzklassen [x ]R
=xU
heiÿen
(Links-)Nebenklassen von U bzgl. G .
Denition 8.19 [Index einer Untergruppe].
Sei
(G , ⊗)
Gruppe, und sei U
≤G
Untergruppe von G . Die Anzahl
der Nebenklassen von U bzgl. G heiÿt Index von U in G und wird
mit |G
: U|
Gruppen, Ringe, Körper
bezeichnet.
Math4Inf
199 / 567
Satz 8.20 [Lagrange ].
27
Sei G endliche Gruppe, und sei U
≤G
Untergruppe von G . Dann
ist
|G | = |U | · |G : U |.
Insbesondere ist die Ordnung einer Untergruppe Teiler der
Gruppenordnung.
Satz 8.21 [Euler ].
28
Sei G endliche Gruppe, und sei x
∈ G.
Dann ist
|<x >|
ein Teiler
von |G |.
Korollar 8.22.
Sei G endliche Gruppe mit neutralem Element e, und sei x
Dann ist x
|G |
27 Joseph-Louis Lagrange, 17361813
28 Leonhard Euler, 17071783
Gruppen, Ringe, Körper
∈ G.
= e.
Math4Inf
200 / 567
Satz 8.23 [Kleiner Satz von Fermat ].
29
Sei a
∈ Z,
und sei p Primzahl mit ggT(p , a)
a
= 1.
Dann ist
p−1 ≡ 1 mod p .
Bemerkung 8.24.
Der kleine Satz von Fermat wird häug benutzt, um zu
entscheiden, ob eine gegebene Zahl n keine Primzahl ist. Dazu sei k
eine Zahl mit ggT (k , n )
man k
n−1 mod n.
= 1,
= 2. Anschlieÿend berechnet
6= 1, dann ist nach dem kleinen
z.B. k
Ist das Ergebnis
Satz von Fermat n keine Primzahl.
Beispiel 8.25.
Sei n
= 4199.
4198
Dann ist 2
mod 4199
= 3702.
Also ist 4199 keine
Primzahl.
29 Pierre de Fermat, 16011665
Gruppen, Ringe, Körper
Math4Inf
201 / 567
Denition 8.26 [Normalteiler].
Sei
(G , ⊗)
Gruppe. Eine Untergruppe U
von G , falls für alle x
xU
∈G
heiÿt Normalteiler
gilt:
= U x , d.h. {x ⊗ u : u ∈ U } = {u ⊗ x : u ∈ U }.
In diesem Falle schreibt man U
Gruppen, Ringe, Körper
≤G
E G.
Math4Inf
202 / 567
Satz 8.27 [Faktorgruppe].
Sei
(G , ⊗)
Gruppe mit neutralem Element e, und sei U
E G.
Die
Menge
G /U
= {g U : g ∈ G }
(Menge der Nebenklassen)
wird mittels der Verknüpfung
(g U ) (h U ) = (g ⊗ h) U
eine Gruppe, die sogenannte Faktorgruppe
(G /U , ), mit
(g U )−1 = g −1 U .
neutralem Element e U und inversem Element
Beispiel 8.28.
Sei m
∈ N. Dann
Zm .
ist m Z
EZ
und die Faktorgruppe
Z/mZ
ist die
Gruppe
Gruppen, Ringe, Körper
Math4Inf
203 / 567
Satz 8.29 [Chinesischer Restsatz].
Seien m1 , . . . , mn
seien
∈ N mit ggT(mi , mj ) = 1 für 1 ≤ i 6= j ≤ n,
a1 , . . . , an ∈ Z. Dann gibt es ein x ∈ Z mit
x
x ist modulo m
≡ ai mod mi ,
1
= m1 · m2 · . . . · mn
und
≤ i ≤ n.
eindeutig bestimmt.
Bemerkung 8.30 [Bestimmen einer Lösung].
sei Mk
•
Für k
•
Dann ist ggT(Mk , mk )
= 1, . . . , n
= m/mk .
= 1 und es gibt ein
· Mk ≡ 1 mod mk (siehe Lemma 3.26).
P
• Sei x = ni=1 ai Mi Ni .
Nk
Gruppen, Ringe, Körper
Math4Inf
Nk
∈Z
mit
204 / 567
Beispiel 8.31.
Gesucht ist eine Zahl x
∈ Z,
die bei Division durch 3 den Rest 2
lässt, bei Division durch 5 den Rest 3, und bei Division durch 7 den
Rest 2, d.h. gesucht ist x
x
∈Z
mit x
≡ 2 mod 3,
x
≡ 3 mod 5
und
≡ 2 mod 7.
•
m1
= 3,
•
M1
= 35,
•
N1
= 2,
•
x
•
Jede Zahl der Form 233
a1
= 2,
M2
N2
m2
= 21,
= 1,
N3
= 5,
M3
a2
= 3,
m3
= 7,
a3
= 2,
m
= 105.
= 15.
= 1.
= 2 · 35 · 2 + 3 · 21 · 1 + 2 · 15 · 1 = 233.
+ z · 105,
z
∈ Z,
ist Lösung; also ist
die kleinste positive Lösung 23.
Gruppen, Ringe, Körper
Math4Inf
205 / 567
Denition 8.32 [Ring].
+, · : R × R → R mit
(x , y ) 7→ x + y (Addition), bzw. (x , y ) 7→ x · y (Multiplikation)
Abbildungen. (R , +, ·) heiÿt Ring, wenn die folgenden Bedingungen
Sei R eine nichtleere Menge, und seien
1.4. erfüllt sind:
1.
(R , +)
(R , +)
ist kommutative Gruppe. Das neutrale Element von
wird mit 0 bezeichnet.
2. Assoziativität bzgl. Multiplikation, d.h. für alle x , y , z
∈R
gilt
(x · y ) · z = x · (y · z ).
3. Bzgl. der Multiplikation existiert ein Einselement, bezeichnet
mit 1, so dass gilt: 1
·x =x ·1=x
4. Distributivgesetze: Für alle x , y , z
x
· (y + z ) = x · y + x · z
und
für alle x
∈R
∈ R.
gilt
(x + y ) · z = x · z + y · z .
5. R heiÿt kommutativer Ring, wenn zusätzlich x
alle x , y
Gruppen, Ringe, Körper
∈R
gilt.
Math4Inf
·y =y ·x
für
206 / 567
Beispiel 8.33.
•
Jeder Körper (vergl. Def. 3.38) ist ein Ring.
• (Z, +, ·)
ist ein Ring (aber kein Körper).
• (Zm , ⊕, )
ist ein Ring (aber i.A. kein Körper, vergl. Satz
3.40).
• Z[i] = {a + b i : a, b ∈ Z}
ist ein Ring mit der gewöhnlichen
Addition und Multiplikation von komplexen Zahlen. Er heiÿt
Ring der Gauÿ'schen Zahlen.
Gruppen, Ringe, Körper
Math4Inf
207 / 567
Denition 8.34 [Polynomring].
(R , +, ·) ein Ring, und seien a1 , . . . , an ∈ R . Die Abbildung
: R → R mit f (x ) = an · x n + an−1 x n−1 + · · · + a1 · x + a0 heiÿt
Polynomfunktion oder kurz Polynom. ai heiÿen die Koezienten
Sei
f
des Polynoms.
Der gröÿte Index i mit ai
6= 0
heiÿt der Grad von f und wird mit
grad(f ) bezeichnet.
Die Menge aller Polynome mit Koezienten aus R wird mit R [x ]
bezeichnet. Mit den Verknüpfungen
(p ⊕ q )(x ) = p (x ) + q (x )
p, q
∈ R [x ]
Gruppen, Ringe, Körper
ist
(R [x ], ⊕, )
und
(p q )(x ) = p (x ) · q (x ),
ein Ring und heiÿt Polynomring.
Math4Inf
208 / 567
Beispiel 8.35.
R[x ]
ist der Ring aller Polynome mit Koezienten aus
p (x )
= 2x 2 − x + 3
und q (x )
R. Sei
= x 5 + 3x 3 − 4x 2 + 6x + 2. Dann
ist
(p ⊕ q )(x ) = (2x 2 − x + 3) + (x 5 + 3x 3 − 4x 2 + 6x + 2)
= x 5 + 3x 3 − 2x 2 + 5x + 5,
(p q )(x ) = (2x 2 − x + 3) · (x 5 + 3x 3 − 4x 2 + 6x + 2)
= 2x 7 − x 6 + 9x 5 − 11x 4 + 25x 3 − 14x 2 + 16x + 6.
Gruppen, Ringe, Körper
Math4Inf
209 / 567
Denition 8.36 [Ringhomomorphismus].
Seien
(R , +, ·)
(S , ⊕, ) Ringe mit Einselementen 1R und 1S .
φ : R 7→ S heiÿt Ringhomomorphismus falls gilt
und
Eine Abbildung
1.
φ(x + y ) = φ(x ) ⊕ φ(y )
x, y ∈ R.
2.
φ(1R ) = 1S .
Ist
φ
bijektiv, dann heiÿt
φ
und
φ(x · y ) = φ(x ) φ(y )
für alle
Ringisomorphismus.
Denition 8.37 [Ideale].
Sei
(R , +, ·)
ein kommutativer Ring. Eine Menge I
⊆R
heiÿt Ideal
von R , falls
1.
(I , +)
ist Untergruppe von
2. Für alle x
Gruppen, Ringe, Körper
∈R
(R , +).
und für alle y
∈I
gilt: x
Math4Inf
· y ∈ I.
210 / 567
Beispiel 8.38.
•
m Z ist ein Ideal in
(Z, +, ·).
•
In jedem Ring R sind
•
Die Menge aller Polynome in
{0}
und R Ideale.
R[x ]
mit Nullstelle 1 bildet ein
Ideal I , welches sich beschreiben lässt als I
Gruppen, Ringe, Körper
Math4Inf
= (x − 1)R[x ].
211 / 567
Bemerkung 8.39.
Sei
(R , +, ·) Ring. Ist (R \ {0}, ·) eine kommutative Gruppe, dann
(R , +, ·) Körper (siehe Def. 3.38). Jeder Körper ist also ein
heiÿt
Ring, aber nicht umgekehrt.
Satz 8.40 [Polynomdivision].
(K , +, ·) Körper und (K[x ], ⊕, ) der zugehörige Polynomring.
Für f , g ∈ K[x ], grad(g ) ≥ 1, gibt es q , r ∈ K[x ] mit
Sei
f
Gruppen, Ringe, Körper
=qg ⊕r
und grad(r )
Math4Inf
< grad(g ).
212 / 567
Folgen und Reihen
Denition 9.1 [Folgen].
Eine (reelle) Folge ist eine Abbildung a
: N0 → R,
n
7→ an ,
auch
geschrieben als a0 , a1 , a2 , . . . . Die reellen Zahlen an heiÿen die
Glieder der Folge. Die Folge wird auch mit
(an )n∈N0
bezeichnet.
Beispiel 9.2.
1 1
1
ist die Folge 1, , , . . . .
• an = n +
1
2 3
• an = n2 ist die Folge 0, 1, 4, 9, 16, . . . .
n ist die Folge 0, 1 , 2 , 3 , . . . .
• an = n +
1
2 3 4
Folgen und Reihen
Math4Inf
213 / 567
Bemerkung 9.3.
Eine Folge muss nicht mit dem Index 0 beginnen; sie kann etwa
auch mit 1 oder jeder beliebigen ganzen Zahl k beginnen. Man
betrachtet dann Funktionen a
schreibt
(an )n∈N
oder
:N→R
(an )n∈Z≥
k
oder a
: Z≥k → R
und
.
Auch kann man als Folgenglieder komplexe Zahlen betrachten. In
diesem Fall betrachtet man Funktionen a
Folgen und Reihen
Math4Inf
: N0 → C.
214 / 567
Beispiel 9.4.
•
Rekursive Folgen:
I
I
I
•
Sei h0 = 2 und für n ≥ 1 sei hn = 12 (hn−1 + hn2−1 ). Dies ergibt
die Folge 2, 1.5, 1.416666 . . . , 1.414215 . . . , 1.414213 . . . , . . . .
Sei f0 = 0, f1 = 1 und für n ≥ 2 sei fn = fn−1 + fn−2 . Dies
ergibt die Fibonacci-Folge 0, 1, 2, 3, 5, 8, . . . (vergl. Beispiel
3.7).
Sei a0 = 1 und für n ≥ 1 sei an = n · an−1 . Dann ist an = n!
(vergl. Bemerkung 3.5).
Alternierende Folgen, d. h. die Folgenglieder haben
abwechslendes Vorzeichen:
I an = (−1)n+1 ist die Folge
I an = (−1/2)n ist die Folge
Folgen und Reihen
−1, 1, −1, 1, −1, 1, −1, 1, . . . .
1, − 12 , 14 , − 18 , . . . .
Math4Inf
215 / 567
Denition 9.5 [Monotone/beschränkte Folgen].
1. Eine (reelle) Folge
(an )n∈N0
heiÿt monton steigend
(bzw. monoton fallend) falls an
alle n
∈ N0 .
2. Eine (reelle) Folge
es ein C
∈R
(an )n∈N0
≤ an + 1
(bzw. an
≥ an + 1 )
für
heiÿt nach oben beschränkt, wenn
gibt, so dass an
≤C
für alle n
∈ N0 .
Entsprechend heiÿt eine Folge nach unten beschränkt, wenn es
ein c
∈R
gibt, so dass an
3. Eine (reelle)
(an )n∈N0
≥c
für alle n
∈ N0 .
heiÿt beschränkt, wenn sie nach oben
und unten beschränkt ist, d.h. wenn es ein M
|an | ≤ M
Folgen und Reihen
für alle n
∈R
gibt, mit
∈ N0 .
Math4Inf
216 / 567
Denition 9.6 [Konvergenz von Folgen].
Eine rellee Folge
(an )n∈N0
∈ R,
> 0 einen
n ≥ n0 in dem
heiÿt konvergent gegen eine Zahl a
wenn es für jede (noch so kleine) positive reelle Zahl
Folgenindex n0 gibt, so dass alle Folgenglieder mit
Interval
(a − , a + )
liegen, d.h.
|an − a| < für alle n
≥ n0 .
In diesem Fall schreibt man
lim a = a
n→∞ n
oder
an
→a
für n
→ ∞.
a heiÿt der Grenzwert der Folge, und man sagt Die Folge
(an )n∈N0
konvergiert gegen a .
Folgen und Reihen
Math4Inf
217 / 567
Beispiel 9.7.
•
Sei an
n .
= n+
1
Oensichtlich nähern sich die Folgenglieder
immer mehr der Zahl 1. Um zu zeigen, dass 1 (tatsächlich) der
Grenzwert dieser Folge ist, muÿ für jedes
>0
ein n0
existieren, so dass
n
− 1 < |an − 1| = n+1
für alle n
≥ n0 .
Wegen
n
−1 n + 1 − 1 = n + 1 =
1
n
+1
kann man in diesem Fall für n0 irgendeine positive ganze Zahl
> 1/ − 1
Folgen und Reihen
wählen.
Math4Inf
218 / 567
Bemerkung 9.8.
i) Eine Folge (an )n∈N0 konvergiert gegen eine Zahl a genau dann,
> 0 nur
(a − , a + ) liegen.
wenn für jedes
von
endlich viele Folgenglieder auÿerhalb
ii) Der Index n0 hängt i. A. immer von
ab; je kleiner
desto
gröÿer n0 .
Denition 9.9 [Teilfolge].
(an )n∈N0 eine Folge und sei M ⊂ N0 mit |M | = ∞. Dann heiÿt
(an )n∈M Teilfolge von (an )n∈N0 . Sie besteht also aus allen
Folgenglieder an , deren Index in M liegt.
Sei
die Folge
Beispiel 9.10.
= (−1)n und sei M ⊂ N0 die Menge aller geraden Zahlen.
Dann ist (an )n∈M die Folge 1, 1, 1, 1, 1, 1, 1, 1, 1, . . . . Man kann sie
auch beschreiben als (a2 n )n∈N0 .
Sei an
Folgen und Reihen
Math4Inf
219 / 567
Bemerkung 9.11.
Ein Folge komplexer Zahlen
(an )n∈N0
mit an
= xn + i yn
heiÿt
(xn )n∈N0
(yn )n∈N0 konvergieren, d.h. es gibt x , y ∈ R
mit xn → x und yn → y für n → ∞. Der Grenzwert der Folge
(an )n∈N0 ist dann x + i y .
konvergent, falls die Folgen bestehend aus den Realteilen
und den Imaginärteilen
Satz 9.12.
i) Der Grenzwert einer Folge ist eindeutig bestimmt. Konvergiert
eine Folge, so konvergiert auch jede Teilfolge gegen den
Grenzwert.
ii) Jede konvergente Folge ist beschränkt, bzw. jede
unbeschränkte Folge ist nicht konvergent.
Folgen und Reihen
Math4Inf
220 / 567
Denition 9.13 [Divergente, bestimmt divergente
Folgen].
1. Eine Folge, die nicht konvergiert, heiÿt divergent.
(an )n∈N0 heiÿt bestimmt divergent gegen ∞, falls
limn→∞ 1/an = 0 und ab einem Index n0 gilt an > 0 für
n ≥ n0 . In diesem Fall schreibt man limn→∞ an = ∞. Man
sagt auch (an )n∈N0 konvergiert gegen ∞.
Analog heiÿt eine Folge (an )n∈N0 heiÿt bestimmt divergent
gegen −∞, falls limn→∞ 1/an = 0 und ab einem Index n0 gilt
an < 0 für n ≥ n0 . In diesem Fall schreibt man
limn→∞ an = −∞. Man sagt dann auch (an )n∈N0 konvergiert
gegen −∞.
2. Eine Folge
3.
Beispiel 9.14.
an
= (−1)n
oder bn
= 2n
bestimmt divergent gegen
Folgen und Reihen
sind divergente Folgen, und
∞.
Math4Inf
(bn )n∈N0
ist
221 / 567
Satz 9.15 [Rechenregeln für konvergente Folge].
(an )n∈N0 , (bn )n∈N0 konvergente Folgen mit den Grenzwerten
α ∈ C. Dann sind auch die Folgen (α an )n∈N0 ,
(an ± bn )n∈N0 , (an · bn )n∈N0 und (an /bn )n∈N0 ,b 6=0 (falls b 6= 0)
Seien
a, b, und sei
n
konvergent mit den Grenzwerten:
lim (a ± bn ) = a ± b ,
n→∞ n
a
an
lim
= .
lim (a · b ) = a · b ,
n→∞ n n
n→∞ bn
b
lim
n→∞
Folgen und Reihen
α an = α a ,
Math4Inf
222 / 567
Satz 9.16.
Sei
(an )n∈N0
die rationale Folge
an
wobei k , m
=
∈ N0
αk nk + αk −1 nk −1 + · · · + α1 n + α0
,
βm nm + βm−1 nm−1 + · · · + β1 n + β0
und
αi , βi ∈ R
0,
a /b ,
k m
lim a =
n→∞ n
∞,
−∞,
mit
für k
für k
für k
für k
αk 6= 0, βm 6= 0.
Dann gilt
< m,
= m,
> m und ak /bm > 0,
> m und ak /bm < 0.
Satz 9.17.
Jede beschränkte und monoton wachsende (oder fallende) Folge
konvergiert.
Folgen und Reihen
Math4Inf
223 / 567
Bemerkung 9.18.
Sei x
> 0.
Die Heron'sche Folge
hn
=
1
2
hn−1
konvergiert für jeden Startwert h0
+
x
hn−1
>0
gegen
√
x.
Bemerkung 9.19.
(an )n∈N0 mit limn→∞ an = 0
< 1 ist an = q n eine Nullfolge.
Eine Folge
mit |q |
Folgen und Reihen
Math4Inf
heiÿt Nullfolge . Für q
∈R
224 / 567
Denition 9.20 [Reihe, Partialsummen].
Sei
(an )n∈N0
eine Folge reeller oder komplexer Zahlen. Man nennt
den (formalen) Ausdruck
∞
X
k =0
ak
= a 0 + a1 + a2 + · · ·
eine (unendliche) Reihe. Die Folge
sn
=
n
X
k =0
ak
(sn )n∈N0
mit den Folgegliedern
= a0 + a1 + a2 + · · · + an
heiÿt Folge der Partialsummen (oder auch Teilsummen) der Reihe.
Folgen und Reihen
Math4Inf
225 / 567
Denition 9.21 [Konvergenz von Reihen].
Sei
P∞
k = 0 ak
eine Reihe und
Partialsummen. Ist
(sn )n∈N0
(sn )n∈N0
die Folge ihrer
konvergent mit Grenzwert s , dann
heiÿt die Reihe konvergent mit Grenzwert s , und man schreibt
s
=
∞
X
k =0
ak .
Andernfalls heiÿt die Reihe divergent.
Folgen und Reihen
Math4Inf
226 / 567
Beispiel 9.22.
•
Die Reihe
∞
X
k =1
•
1
k
heiÿt harmonische Reihe
und ist divergent!.
Die Reihe
∞ k
X
1
2
k =0
ist konvergent mit Grenzwert 2.
•
Die Reihe
∞
X
k =1
ist konvergent mit Grenzwert
Folgen und Reihen
1
k2
π 2 /6.
Math4Inf
227 / 567
Satz
P 9.23.
Ist
∞
k =0 ak eine konvergente Reihe, dann ist (an )n∈N0 eine
Nullfolge, d.h. limn→∞ an
= 0.
Die Umkehrung gilt im Allgemeinen
nicht, siehe z.B. harmonische Reihe.
Folgen und Reihen
Math4Inf
228 / 567
Satz 9.24 [Geometrische Reihe].
Sei q
∈R
oder
C.
Eine Reihe der Form
∞
X
q
k
k =0
heiÿt geometrische Reihe, wobei der Index k nicht unbedingt bei 0
beginnen muss. Sei
gilt für q
6= 1
(sn )n∈N0
sn
=
die Folge ihrer Partialsummen. Dann
n
X
q
k=
1
k =0
− q n +1
.
1−q
Die geometrische Reihe ist genau dann konvergent, wenn |q |
< 1,
und in diesem Fall ist
∞
X
k =0
Folgen und Reihen
q
k=
1
1
−q
Math4Inf
.
229 / 567
Satz 9.25 [Rechenregeln für konvergente Reihen].
P∞
P∞
k konvergente Reihen,
k =0 ak , k =0Pb∞
P∞ und sei α ∈ C. Dann
auch die Reihen
k =0 (α ak ) und k =0 (ak ± bk ) konvergent,
Seien
sind
und es gilt
∞
X
(α ak ) = α
∞
X
ak ,
k =0
k =0
∞
∞
∞
X
X
X
(ak ± bk ) =
ak ±
bk .
k =0
k =0
k =0
Folgen und Reihen
Math4Inf
230 / 567
Denition
9.26.
P
∞
a eine Reihe. Ist die Reihe
k =∞
0 k
P
heiÿt
k =0 ak absolut konvergent.
Sei
P∞
k =0 |ak |
konvergent, dann
Bemerkung 9.27.
Jede absolut konvergente Reihe ist konvergent.
Bemerkung
9.28.
P
P
Seien
∞
k = 0 ak ,
∞
k =0 bk absolut konvergente Reihen. Dann ist
auch ihr Cauchy-Produkt
∞
X
k =0
ck mit ck
=
k
X
i =0
ai bk −i
(absolut) konvergent, und es gilt
∞
X
k =0
Folgen und Reihen
ck
=
∞
X
k =0
!
ak
Math4Inf
∞
X
k =0
!
bk
.
231 / 567
Denition 9.29 [Alternierende Reihe].
Ist
(ak )k ∈N0
eine alternierende Folge, d.h. die Folgenglieder sind
abwechselnd nicht-negativ und nicht-positiv, dann heiÿt
einen alternierende Reihe.
P∞
k = 0 ak
Satz 9.30 [Konvergenzkriterium von Leibniz ].
30
Sei
(ak )k ∈N0
eine monoton fallende Nullfolge nicht-negativer
Zahlen. Dann konvergiert die alternierende Reihe
∞
X
Beispiel 9.31.
k =0
(−1)k ak .
∞
X
k =1
1
(−1)k
k
ist konvergent, aber nicht absolut konvergent.
30 Gottfried Wilhelm Freiherr von Leibniz, 1646-1716
Folgen und Reihen
Math4Inf
232 / 567
Satz 9.32 [Majorantenkriterium].
Sei
P∞
k = 0 ak
eine Reihe.
i) Wenn es eine konvergente Reihe
gibt mit
ii)
P∞
k =0 bk
und eine k0
∈ N0
|ak | ≤ bk für alle k ≥ k0 ,
P∞
P∞
dann ist die Reihe
ak (absolut) konvergent.
k
=
0
k =0 bk
P∞
heiÿt Majorante für
k = 0 ak . P
∞
Wenn es eine divergente Reihe
k =0 bk und eine k0 ∈ N0 gibt
mit
|ak | ≥ bk ≥ 0 für alle k ≥ k0 ,
P∞
dann ist die Reihe
dann die
k =0 ak divergent. Man nennt
P∞
P∞
Reihe
b
eine
(divergente)
Minorante
für
k =0 k
k = 0 ak .
Folgen und Reihen
Math4Inf
233 / 567
Satz 9.33 [Quotientenkriterium].
Sei
P∞
k = 0 ak
eine Reihe.
< 1 und ein k0 ∈ N0 gibt, so
ak + 1 a ≤ q für alle k ≥ k0 ,
k
P∞
dann ist die Reihe
k =0 ak (absolut) konvergent.
Wenn es ein k0 ∈ N0 gibt, so dass
ak + 1 a ≥ 1 für alle k ≥ k0 ,
k
P∞
dann ist die Reihe
k =0 ak divergent.
i) Wenn es eine Zahl q
ii)
Folgen und Reihen
Math4Inf
dass
234 / 567
Bemerkung
9.34.
P
Sei
∞
k =0 ak eine Reihe, und sei
ak + 1 bk =
a k
eine konvergente Folge mit Grenzwert b. Ist b
P∞
k = 0 ak
(absolut) konvergent. Ist b
divergent. Im Falle b
=1
> 1,
< 1,P
dann
dann ist
ist
∞
k = 0 ak
ist keine Aussage möglich, die Reihe kann
sowohl konvergent als auch divergent sein.
Folgen und Reihen
Math4Inf
235 / 567
Stetigkeit von Funktionen
Denition 10.1 [(Strenge) Montonie von Funktionen].
Sei D
⊆R
und sei f
:D→R
eine Funktion.
1. f heiÿt streng monoton wachsend, falls f (x )
x, y
∈D
mit x
∈D
mit x
für alle
> y.
2. f heiÿt streng monoton fallend, falls f (x )
x, y
> f (y )
< f (y )
für alle
> y.
3. Gilt lediglich f (x )
≥ f (y ),
bzw. f (x )
≤ f (y ),
dann heiÿt die
Funktion nur monoton wachsend, bzw. monoton fallend.
Denition 10.2 [Beschränktheit von Funktionen].
Eine Funktion f
M
>0
gibt mit
Stetigkeit von Funktionen
: D → R mit D ⊆ R heiÿt beschränkt,
|f (x )| ≤ M für alle x ∈ D .
Math4Inf
falls es ein
236 / 567
Denition 10.3 [Rationale Funktionen].
∈ R[x ] Polynome. Dann heiÿt die Funktion
= p (x )/q (x ) rationale Funktion. Sie ist überall dort
das Nennerpolynom q (x ) 6= 0 ist.
Seien p , q
f (x )
wo
deniert,
Beispiel 10.4.
Sei
f (x )
=
x
Sie ist deniert auf der Menge
Stetigkeit von Funktionen
3
+ x2 + x + 1
.
x2 − 1
R \ {−1, 1}.
Math4Inf
237 / 567
Denition 10.5 [Exponentialfunktion].
Sei a
> 0.
Eine Funktion der Form f
:R→R
mit f (x )
= ax
heiÿt
Exponentialfunktion zur Basis a. Ist die Basis die Eulersche Zahl
e
= 2, 7182818284...,
dann heiÿt die Funktion einfach
Exponentialfunktion (oder auch e-Funktion.
Basis a
Stetigkeit von Funktionen
= 1/2
Basis e
Math4Inf
238 / 567
Satz 10.6 [Eigenschaften der Exponentialfunktion].
Sei f (x )
= ax
i) f (0)
= 1.
ii) f (x )
>0
iii) Ist a
Ist a
mit a
> 0.
für alle x
Dann gilt:
∈ R.
< 1, dann ist f (x ) eine streng monoton fallende Funktion.
> 1, dann ist f (x ) eine streng monoton wachsende
Funktion. Die Exponentialfunktion ist unbeschränkt.
iv) f (x
+ y ) = f (x ) · f (y )
Stetigkeit von Funktionen
für alle x , y
∈ R.
Math4Inf
239 / 567
Denition 10.7 [Logarithmusfunktion].
> 0, a 6= 1. Die Umkehrfunktion der Exponentialfunktion
: R → (0, ∞), f (x ) = ax , heiÿt Logarithmusfunktion zur Basis
Sei a
f
a,
und wird mit
loga
: (0, ∞) → R,
x
7→ loga (x ),
bezeichnet. Ist die Basis e, dann spricht man von dem natürlichen
Logarithmus, der mit ln(x ) bezeichnet wird.
Basis a
Stetigkeit von Funktionen
= 1 /2
Basis e
Math4Inf
240 / 567
Satz 10.8 [Eigenschaften der Logarithmusfunktion].
Sei a
> 0,
a
i) loga (1)
ii) Ist a
6= 1.
=0
< 1,
und loga (a)
= 1.
dann ist loga (x ) eine streng monoton fallende
Funktion. Ist a
> 1,
dann ist loga (x ) eine streng monoton
wachsende Funktion. Die Logarithmusfunktion ist
unbeschränkt.
· y ) = loga (x ) + loga (y )
b
loga (x ) = b · loga (x ), b ∈ R.
iii) loga (x
iv)
Stetigkeit von Funktionen
für x , y
Math4Inf
∈ (0, ∞).
241 / 567
Bemerkung 10.9.
6= 1. Dann gilt:
x
i) loga (a ) = x .
ii) ax = b x ·log (a) .
x
iii) loga ( y ) = loga (x ) − loga (y ).
iv) loga (x ) = logb (x )/ logb (a).
Weiterhin ist ln(x ) ≤ x − 1 für alle
Sei a
> 0,
a
b
Stetigkeit von Funktionen
x
∈ (0, ∞).
Math4Inf
242 / 567
Notation 10.10 [Intervalle].
Seien a, b
∈ R,
a
≤ b.
[a, b] = {x ∈ R : a ≤ x ≤ b}
heiÿt abgeschlossenes Intervall , und
(a, b) = {x ∈ R : a < x < b}
heiÿt oenes Intervall . Analog deniert man halboene (bzw.
halbabgeschlossene) Intervalle, z.B.
[a, b) = {x ∈ R : a ≤ x < b}.
Unter [a, ∞) (bzw.
(a, ∞))
versteht man alle Zahlen
≥a
(bzw.
> a).
Stetigkeit von Funktionen
Math4Inf
243 / 567
Denition 10.11 [Hyperbelfunktionen].
Die Funktionen
sinh(x )
=
ex
− e−x
2
und cosh(x )
=
ex
+ e−x
2
heiÿen Sinus hyperbolicus und Cosinus hyperbolicus.
sinh
Stetigkeit von Funktionen
:R→R
cosh
: R → [1, ∞)
Math4Inf
244 / 567
Denition 10.12 [(Un)gerade Funktionen].
Sei D
⊆R
:D→R
und f
1. f heiÿt gerade, falls f
eine Funktion.
(−x ) = f (x )
2. f heiÿt ungerade, falls f
für alle x , −x
(−x ) = −f (x )
∈ D.
für alle x , −x
∈ D.
Satz 10.13 [Eigenschaften der Hyperbelfunktionen].
i) sinh(0)
= 0,
cosh(0)
= 1.
ii) sinh ist ungerade, und cosh ist gerade.
2
iii) cosh
(x ) − sinh2 (x ) = 1
für alle x
∈ R.
iv) Es gelten die Additionstheoreme:
Stetigkeit von Funktionen
sinh(x
+ y ) = sinh(x )
cosh(y )
+ cosh(x )
sinh(y ),
cosh(x
+ y ) = cosh(x )
cosh(y )
+ sinh(x )
sinh(y ).
Math4Inf
245 / 567
Denition 10.14 [Periodische Funktionen].
Sei f
:R→R
falls für alle x
eine Funktion. f heiÿt periodisch mit Periode p
∈R
> 0,
gilt
f (p
+ x ) = f (x ).
Beispiel 10.15.
sin, cos
:R→R
sind periodische Funktionen mit Periode 2π .
Desweiteren ist sin ungerade, und cos ist eine gerade Funktion.
Stetigkeit von Funktionen
Math4Inf
246 / 567
Beispiel 10.16.
Sei f
: R \ { 0} → R
Stetigkeit von Funktionen
mit f (x )
=
sin(
x
x) .
Math4Inf
247 / 567
Denition 10.17 [Grenzwert einer Funktion].
⊆ R, f : D → R eine Funktion, und sei x ? ∈ R. Wenn es ein
∈ R gibt, so dass für jede Folge (xn )n∈N0 mit xn ∈ D \ {x ? } und
Sei D
?
y
?
lim x = x
n→∞ n
gilt, dass die Folge der Funktionswerte
(f (xn ))n∈N0
gegen y
?
konvergiert, also
lim f (xn )
n→∞
dann heiÿt y
= y ?,
? der Grenzwert von f für x gegen x ? . Man schreibt
dafür
Hierbei ist auch y
?
?
lim f (x ) = y .
x →x ?
= ±∞ erlaubt (siehe (9.13))
und man spricht
dann von bestimmter Divergenz.
Stetigkeit von Funktionen
Math4Inf
248 / 567
Beispiel 10.18.
i)
sin(x )
lim
x →0
x
= 1.
ii)
lim
1
x →0 |x |
= ∞.
iii)
+ 1 = 11.
(
1,
x > 0
f (x ) =
.
−1, x < 0
lim
x →5
iv) Sei f
: R \ { 0} → R
mit
2x
Dann existiert
limx →0 f (x ) nicht, d.h. f hat keinen Grenzwert für x gegen 0.
Stetigkeit von Funktionen
Math4Inf
249 / 567
Denition 10.19 [Rechts-Linksseitiger Grenzwert].
⊆ R, f : D → R eine Funktion, und sei x ? ∈ R. Wenn es ein
∈ R gibt, so dass für jede Folge (xn )n∈N0 mit xn ∈ D \ {x ? },
?
xn > x (!), und
?
lim x = x
n→∞ n
Sei D
?
y
gilt, dass
= y ?,
lim f (xn )
n→∞
dann heiÿt y
? der rechtsseitige Grenzwert von f für x gegen x ? .
Man schreibt dafür
lim
x →x ? +
f (x )
= y ?.
Analog deniert man den linkssseitigen Grenzwert von f für x gegen
?
x , indem man nur Folgen
und limn→∞ xn
=
(xn )n∈N0
∈ D \ {x ? }, xn < x ?
(!),
?
x betrachet. In diesem Falle schreibt man
lim
x →x ? −
Stetigkeit von Funktionen
mit xn
f (x )
= y ?.
Math4Inf
250 / 567
Beispiel 10.20.
(
Sei f
: R \ { 0} → R
mit f (x )
lim f (x )
x →0+
=1
=
und
1,
x
−1,
x
>0
.
<0
lim f (x )
x →0−
Dann gilt
= −1.
Bemerkung 10.21.
Es gilt
lim f (x )
x →x ?
Stetigkeit von Funktionen
= y? ⇔
lim
x →x ? +
f (x )
=
lim
x →x ? −
Math4Inf
f (x )
= y ?.
251 / 567
Satz 10.22 [Rechenregeln für Grenzwerte].
Seien f
,g
lim f (x )
Funktionen mit
x →x ?
gilt
i)
x →x ?
ii)
x →x ?
iii)
x →x ?
iv)
α f (x ) = α ŷ
lim
(f (x ) ± g (x )) = ŷ ± ỹ .
lim
(f (x ) · g (x )) = ŷ · ỹ .
f (x ) = ŷ
lim
ỹ
x →x ? g (x )
Stetigkeit von Funktionen
falls ỹ
und
lim g (x )
x →x ?
= ỹ .
Dann
α ∈ R.
lim
für
= ŷ
6= 0.
Math4Inf
252 / 567
Denition 10.23 [Asymptotisches Verhalten].
Sei f
: R → R eine Funktion. Unter dem asymptotischen Verhalten
→ ∞ versteht man den Grenzwert (falls existent und
von f für x
±∞
sind zugelassen)
lim f (x ).
x →∞
Analog deniert man das asymptotischen Verhalten von f für
x
→ −∞
als
lim
x →−∞
f (x ).
Beispiel 10.24.
i)
lim
1
x →∞ x
=0
und
1
lim
x →−∞ x
=0
ii)
lim x
x →∞
Stetigkeit von Funktionen
3
=∞
und
lim
x →−∞
Math4Inf
x
3
= −∞.
253 / 567
Beispiel 10.25.
i) limx →∞ x a
ii)
iii)
iv)
v)
= ∞ für a > 0.
a
limx →∞ x = 0 für a < 0.
n
n
limx →−∞ x = (−1) ∞ für n ∈ N.
a x = ∞ und limx →−∞ ea x = 0.
Für a > 0 ist limx →∞ e
limx →∞ ln(x ) = ∞ und limx →0 ln(x ) = −∞.
Stetigkeit von Funktionen
Math4Inf
254 / 567
Denition 10.26 [Stetigkeit].
Sei D
⊆ R,
f
:D→R
eine Funktion, und sei x
?
∈ D.
f heiÿt
∗
stetig im Punkt x , falls
lim f (x )
x →x ?
= f (x ∗ ),
d.h. der Grenzwert limx →x ? f (x ) existiert und ist gleich f (x
bedeutet, für jede Folge
limn→∞ xn
=
?
x gilt
(xn )n∈N0 , xn ∈ D \
lim f (xn )
n→∞
? ). Dies
{x ? }, mit
= f ( lim xn ) = f (x ? ).
n→∞
Ist die Funktion f in jedem Punkt ihres Denitionsbereiches D
stetig, dann heiÿt f stetig.
Stetigkeit von Funktionen
Math4Inf
255 / 567
Bemerkung 10.27.
Stetigkeit von f
:D→R
in x
? bedeutet also, dass für x in der
?
?
Nähe von x auch f (x ) nahe an f (x ) ist. Genauer: Zu jedem
δ>0
existiert ein
>0
mit
|f (x ) − f (x ? )| < δ
Stetigkeit von Funktionen
für alle x
∈D
Math4Inf
mit |x
− x ? | < .
256 / 567
Beispiel 10.28.
i) Jede konstante Funktion ist stetig.
ii) f
:R→R
mit f (x )
=x
ist stetig.
: R → R mit f (x ) = bx c ist nicht stetig in z ∈ Z.
bx c die gröÿte ganze Zahl kleiner oder gleich x .
iii) f
iv) f
:R→R
mit f (x )
= |x | ist stetig.
−1, x < 0,
f (x ) =
0,
x = 0,
1,
x > 0
v) f
:R→R
mit
Hierbei ist
ist nicht stetig im
Punkt 0.
Stetigkeit von Funktionen
Math4Inf
257 / 567
Bemerkung 10.29.
Die Exponentialfunktionen, die Logarithmusfunktionen, die
Hyperbelfunktionen, sin(x ), cos(x ), oder auch
Satz 10.30.
Seien f (x ), g (x ) Funktionen, die in x
√
x sind stetig.
? stetig sind. Dann sind auch
die Funktionen
α f (x ) mit α ∈ R, f (x ) ± g (x ),
f (x )
, falls g (x ? ) 6= 0,
g (x )
f (x )
· g (x ),
?
stetig in x . Ist die Verknüpfung f (g (x )) der beiden Funktionen
?
deniert, dann ist auch f (g (x )) stetig in x .
Stetigkeit von Funktionen
Math4Inf
258 / 567
Beispiel 10.31.
i) Jedes Polynom ist stetig.
ii) Alle rationalen Funktionen sind in ihrem Denitionsbereich
stetig.
iii) f
: R \ { 0} → R
mit f (x )
iv) f
:R→R
mit f (x )
v) f
:R→R
mit
Stetigkeit von Funktionen
= 1 /x
ist stetig.
2
= |2 x − x | ist stetig.
sin(5 cos (x 2 )+x 3 )
f (x ) = e
ist stetig.
Math4Inf
259 / 567
Satz 10.32 [Zwischenwertsatz].
: [a, b] → R stetig. Dann nimmt f jeden Wert zwischen f (a)
und f (b ) an, d.h.
für jedes y ∈ [f (a), f (b )] (bzw. y ∈ [f (b ), f (a)] falls f (b ) < f (a))
gibt es ein x ∈ [a, b ] mit f (x ) = y .
Sei f
f (b)
y
f (a)
Stetigkeit von Funktionen
x
Math4Inf
260 / 567
Satz 10.33 [Weierstraÿ ].
31
Jede auf einem abgeschlossenen Intervall [a, b ] stetige Funktion
f
: [a, b] → R
nimmt auf diesem Intervall ihr Maximum und
Minimum an, d.h.
es gibt x̃ , x̂
∈ [a, b]
mit
f (x̃ )
= max{f (x ) : x ∈ [a, b]}, und
f (x̂ )
= min{f (x ) : x ∈ [a, b]}.
31 Karl Theodor Wilhelm Weierstraÿ 1815 - 1897
Stetigkeit von Funktionen
Math4Inf
261 / 567
Dierenzierbarkeit I
Denition 11.1 [Sekante].
Sei D
⊆R
und sei f
:D→R
eine Funktion. Für x0 , x1
∈D
heiÿt
die Gerade
s (x )
= f (x0 ) +
− f (x0 )
(x − x0 )
x1 − x0
f (x1 )
Sekante von f durch die Punkte
(x0 , f (x0 ))
und
(x1 , f (x1 )).
− f (x0 )
x1 − x0
f (x1 )
ist die Steigung der Sekante.
Dierenzierbarkeit I
Math4Inf
262 / 567
Denition 11.2 [Dierenzierbarkeit].
Sei D
⊆ R,
f
:D→R
eine Funktion, und sei x
?
∈ D.
f heiÿt
?
dierenzierbar in x , wenn der Grenzwert (der Sekantensteigungen)
lim
f (x )
x →x ?
x
− f (x ? )
− x?
0 (x ? ) oder auch
?
bezeichnet, und heiÿt Ableitung von f in x . Ist f in jedem
?
Punkt x ∈ D dierenzierbar, dann heiÿt f dierenzierbar, und die
existiert. In diesem Fall wird der Grenzwert mit f
f ?
x (x )
d
d
Funktion
f
:D→R
heiÿt Ableitung von f . Für f
bzw. einfach
Ist f
f
x
mit x
7→ f 0 (x )
0 (x ) schreibt man auch
d
.
d
f
x (x )
d
d
0 eine stetige Funktion, dann heiÿt f stetig dierenzierbar.
Dierenzierbarkeit I
Math4Inf
263 / 567
Bemerkung 11.3.
Ist f in x
? dierenzierbar, dann ist
t (x )
= f (x ? ) + f 0 (x ? ) (x − x ? ),
die Gleichung der Tangente durch
x
∈ R,
(x ? , f (x ? )).
Beispiel 11.4.
i) f (x )
ii) f (x )
iii) f (x )
=x
=x
=
ist (stetig) dierenzierbar mit f
2
0 (x )
= 1.
0
ist (stetig) dierenzierbar mit f (x )
|x | ist nicht dierenzierbar in x ?
= 2 x.
= 0.
Satz 11.5.
Jede dierenzierbare Funktion ist stetig (aber nicht umgekehrt).
Dierenzierbarkeit I
Math4Inf
264 / 567
Satz 11.6.
⊆ R,
Sei D
und seien f
,g : D → R
Funktionen, die in x
dierenzierbar sind. Dann sind auch
αf ,
f
± g,
f
·g
?
in x
∈D
?
dierenzierbar, und es gilt:
i)
iii)
(α f )0 (x ? ) = α f 0 (x ? ),
(f ± g )0 (x ? ) = f 0 (x ? ) ± g 0 (x ? ),
(f · g )0 (x ? ) = f 0 (x ? ) · g (x ? ) + f (x ? ) · g 0 (x ? ).
Ist g (x
?)
6= 0,
0
f
iv)
g
dann ist auch
(x ? ) =
f
Ist die Verknüpfung f
ist f
ii)
◦
f
g
in x
? dierenzierbar mit
0 (x ? ) · g (x ? )
− f (x ? ) · g 0 (x ? )
.
g (x ? )2
◦g
(Produktregel)
deniert, und ist f in g (x
(Quotientenregel)
? ) dibar, dann
?
g in x dierenzierbar mit
v)
Dierenzierbarkeit I
(f ◦ g )0 (x ? ) = f 0 (g (x ? )) · g 0 (x ? ).
Math4Inf
(Kettenregel)
265 / 567
Satz 11.7 [Ableitung elementarer Funktionen I].
Funktion
Ableitung
c
0
n
x
e
x
a ,
a
x ,
(Konstante)
x , n
∈ Z \ { 0 },
> 0,
x > 0, a > 0,
sin(x )
cos(x )
sin(x )
tan(x ) =
cos(x )
Dierenzierbarkeit I
a
nx
ex
x
a
n −1
ln(a)
a
−1
ax
cos(x )
− sin(x )
1
cos2 (
Math4Inf
x)
266 / 567
Bemerkung 11.8.
Sei f
:D→R
dierenzierbar. f ist genau dann monoton steigend
(bzw. fallend), falls f
0
f (x )
>
0 (x )
0
0 (bzw. f (x )
≥0
< 0)
(bzw. f
für alle x
0 (x )
≤ 0) für alle x ∈ D .
∈ D , dann ist f streng
Ist
monoton steigend (bzw. fallend).
Satz 11.9 [Ableitung der Umkehrfunktion].
⊆ R, f : D → R eine stetige, streng monotone Funktion, und
−1 : D̃ → R. Ist
sei D̃ = f (D ). Dann existiert die Umkehrfunktion f
?
0
?
−
1
?
?
f in x dierenzierbar mit f (x ) 6= 0, so ist f
in y = f (x )
Sei D
dierenzierbar, und es gilt
f
Dierenzierbarkeit I
−1 0
(y ? ) =
1
f 0 (x ? )
=
Math4Inf
1
f 0 (f −1 (y ? ))
267 / 567
Satz 11.10 [Ableitung elementarer Funktionen II].
Funktion
Ableitung
ln(x )
x
x
1
> 0, a 6= 1
arcsin(x ), x ∈ (−1, 1)
arccos(x ), x ∈ (−1, 1)
arctan(x )
loga (x ), a
1
ln(
1
a)
1−x 2
− √11−x 2
√
1
1+
x2
Beispiel 11.11.
lim
n→∞
Dierenzierbarkeit I
1
+
1
n
n
= e.
Math4Inf
268 / 567
Satz 11.12 [Regel von de l'Hospital ].
32
Sei D
⊆ R, f , g : D → R
dierenzierbar, und sei x
?
∈ D (±∞
zugelassen). Gilt
lim f (x )
x →x ?
=
lim g (x )
x →x ?
= 0,
oder
und existiert
lim |f (x )| = lim |g (x )| = ∞,
x →x ?
x →x ?
0
f (x )
limx →x ? 0
g (x ) (±∞ zugelassen), dann
lim
f (x )
x →x ? g (x )
=
lim
x →x ?
32 Guillaume de l'Hospital, 1661-1704
Dierenzierbarkeit I
Math4Inf
f
0 (x )
g 0 (x )
gilt
.
269 / 567
Beispiel 11.13.
x ) = lim
cos(x )
x →0 1 = 1.
2
2 −x
limx →∞ x e
= limx →∞ xe = limx →∞ 2e x = limx →∞
ln(x )
limx →0+ x ln(x ) = limx →0+
= limx →0+ −11//xx 2 =
1/x
limx →0+ (−x ) = 0.
1. limx →0
2.
3.
Dierenzierbarkeit I
sin(
x
x
x
Math4Inf
2
ex
= 0.
270 / 567
Denition 11.14 [Höhere Ableitungen].
Sei D
⊆R
Ableitung f
: D → R eine dierenzierbare Funktion. Ist
: D → R in x ? ∈ D dierenzierbar, dann heiÿt
und f
0
die
(f 0 )0 (x ? )
? und wird mit f 00 (x ? ) bezeichnet.
?
Analog deniert man rekursiv die 3-te, 4-te usw. Ableitung in x .
?
(
n
)
?
Allgemein wird n-te Ableitung von f in x mit f
(x ) bezeichnet.
die zweite Ableitung von f in x
Die Funktion selbst wird auch als 0-te Ableitung f
Dierenzierbarkeit I
Math4Inf
(0) bezeichnet.
271 / 567
Denition 11.15 [Konvexe/konkave Funktionen].
Sei D
⊆ R.
Eine Funktion f
:D→R
i) konvex in einem Intervall [a, b ]
λ ∈ [0, 1]
und alle
f
heiÿt
⊆ D,
falls für alle x0 , x1
∈ [a, b]
gilt
((1 − λ) x0 + λ x1 ) ≤ (1 − λ) f (x0 ) + λ f (x1 ),
d.h. die Sekante, die
(x0 , f (x0 ))
und
(x1 , f (x1 ))
verbindet, liegt
in diesem Bereich oberhalb des Funktionsgraphen.
ii) konkav in einem Intervall [a, b ]
λ ∈ [0, 1]
und alle
f
⊆ D,
falls für alle x0 , x1
∈ [a, b]
gilt
((1 − λ) x0 + λ x1 ) ≥ (1 − λ) f (x0 ) + λ f (x1 ),
d.h. die Sekante, die
(x0 , f (x0 ))
und
(x1 , f (x1 ))
verbindet, liegt
in diesem Bereich unterhalb des Funktionsgraphen.
Dierenzierbarkeit I
Math4Inf
272 / 567
Satz 11.16.
Sei D
⊆R
und f
:D→R
in [a, b ]
⊆D
zweimal dierenzierbar.
Dann gilt
i) f ist konvex in [a, b ] genau dann, wenn f 00 (x )
x
∈ [a, b],
ii) f ist konkav in [a, b ] genau dann, wenn f 00 (x )
x
∈ [a, b],
Dierenzierbarkeit I
≥0
für alle
d.h. die erste Ableitung ist monoton steigend.
≤0
für alle
d.h. die erste Ableitung ist monoton fallend.
Math4Inf
273 / 567
Denition 11.17 [lokale/globale Extrema].
Sei D
⊆R
und f
:D→R
eine Funktion. x
i) lokales (relatives) Maximum, falls ein
f (x )
≤ f (x ? )
für alle x
≥ f (x ? )
für alle x
∈D
>0
heiÿt
existiert, so dass
∈ (x ? − , x ? + ) ∩ D .
ii) lokales (relatives) Minimum, falls ein
f (x )
?
>0
existiert, so dass
∈ (x ? − , x ? + ) ∩ D .
iii) globales Maximum, falls
f (x )
≤ f (x ? )
für alle x
∈ D.
für alle x
∈ D.
iv) globales Minimum, falls
f (x )
≥ f (x ? )
v) Lokale/globale Minima oder Maxima werden als lokale/globale
Extrema bzw. Extremwerte der Funktion bezeichnet.
Dierenzierbarkeit I
Math4Inf
274 / 567
Satz 11.18 [Kriterium für lokale Extrema].
∈ (a, b). Ist x ? ein
0 ?
lokales Minimum oder Maximum, dann gilt f (x ) = 0.
?
Sei f : [a, b ] → R zweimal dierenzierbar, und sei x ∈ (a, b ).
I Ist f 0 (x ? ) = 0 und f 00 (x ? ) < 0, dann ist x ? ein lokales
Maximum.
I Ist f 0 (x ? ) = 0 und f 00 (x ? ) > 0, dann ist x ? ein lokales
Minimum.
i) Sei f
ii)
: [a, b] → R
dierenzierbar, und sei x
?
Satz 11.19.
Sei f
: [a, b] → R n-mal
= 0 und f (n) (x ? )
0 ?
f (x )
dierenzierbar, und sei x
?
∈ (a, b).
Sei
die erste Ableitung, die an der Stelle x
(i ) (x ? )
nicht gleich 0 ist, d.h., f
(n) (x ? ) 6= 0.
f
= 0,
1
≤i ≤n−1
?
und
Ist n gerade und
i) f (n) (x ? )
ii) f (n) (x ? )
Dierenzierbarkeit I
< 0,
dann ist x
? ein lokales Maximum.
> 0,
dann ist x
? ein lokales Minimum.
Math4Inf
275 / 567
Denition 11.20 [Wendepunkte, Sattelpunkte].
: [a, b] → R eine Funktion. x ? ∈ (a, b) heiÿt Wendepunkt,
?
?
wenn es ein > 0 gibt, so dass f in [x − , x ] konkav und in
[x ? , x ? + ] konvex ist (oder umgekehrt).
?
0 ?
Ist f in x dierenzierbar, und gilt zudem f (x ) = 0, dann wird
Sei f
der
Wendepunkt auch Sattelpunkt genannt.
Dierenzierbarkeit I
Math4Inf
276 / 567
Satz 11.21 [Kriterium für Wendepunkte].
i) Sei f
: [a, b] → R
zweimal dierenzierbar, und sei x
?
00 ?
Ist x ein Wendepunkt, dann gilt f (x )
?
∈ (a, b).
= 0.
: [a, b] → R dreimal dierenzierbar, und sei x ? ∈ (a, b).
00 ?
000 ?
?
f (x ) = 0 und f (x ) 6= 0, dann ist x ein Wendepunkt.
ii) Sei f
Ist
Satz 11.22.
: [a, b] → R n-mal
0
?
(n) (x ? )
f (x ) = 0 und f
Sei f
dierenzierbar, und sei x
∈ (a, b).
Sei
die erste Ableitung, die an der Stelle x
(i ) (x ? )
nicht gleich 0 ist, d.h., f
(
n
)
?
f
(x ) 6= 0.
Ist n ungerade, dann ist x
Dierenzierbarkeit I
?
= 0,
1
≤i ≤n−1
?
und
? ein Sattelpunkt.
Math4Inf
277 / 567
Bemerkung 11.23.
Maxima und Minima am Rand eines Intervalls können i.A. nicht mit
Hilfe der Dierentialrechnung bestimmt werden.
Beispiel 11.24.
Sei f
: [0, 1] → R
mit f (x )
= x.
Dann ist das globale Maximum bei
1 und das globale Minimum bei 0, aber in beiden Punkten ist die
Ableitung gleich 1.
Bemerkung 11.25.
Um alle Maxima und Minima einer Funktion zu bestimmen, müssen
die Randpunkte und alle Punkte, in denen die Funktion nicht
dierenzierbar ist, gesondert untersucht werden.
Beispiel 11.26.
Sei f
: [−1, 1] → R
mit(
f (x )
Dierenzierbarkeit I
=
+ x,
−1 ≤ x ≤ 0,
2
1 − x + x , 0 ≤ x ≤ 1.
1
Math4Inf
278 / 567
Satz 11.27 [Satz von Rolle ].
33
Sei f
: [a, b] → R
eine dierenzierbare Funktion, mit f (a)
?
Dann gibt es ein x
∈ (a, b)
0 ?
mit f (x )
= f (b).
= 0.
Satz 11.28 [Mittelwertsatz der Dierentialrechnung].
: [a, b] → R
∈ (a, b) mit
Sei f
?
x
eine dierenzierbare Funktion. Dann gibt es ein
f
0
(x ? ) =
f (b )
b
− f (a)
.
−a
Satz 11.29.
: [a, b] → R eine dierenzierbare
x ∈ (a, b ). Dann ist f konstant.
Sei f
alle
Funktion. mit f
0 (x )
=0
für
Satz 11.30.
Sei f
:R→R
eine dierenzierbare Funktion, und für eine
Konstante c gelte f
c x.
f (x ) = f (0)e
0 (x )
= c f (x )
33 Michel Rolle, 16521719
Dierenzierbarkeit I
für alle x
Math4Inf
∈ R.
Dann ist
279 / 567
Bemerkung 11.31 [Interpolationspolynom].
: [a, b] → R eine Funktion, n ∈ N, und seien xi ∈ [a, b],
i = 0, . . . , n, mit a = x0 < x1 < x2 < · · · < xn−1 < xn = b
Stützstellen. Dann existiert ein eindeutiges Polynom p (x ) vom Grad
≤ n mit p (xi ) = f (xi ), 0 ≤ i ≤ n.
n
n−1 + · · · + a1 x + a0 . Aus den
Ansatz: Sei p (x ) = an x + an−1 x
Bedingungen p (xi ) = f (xi ), 0 ≤ i ≤ n, erhält man n + 1 lineare
Gleichungen für die n + 1 Unbekannten a0 , a1 , . . . , an , und somit
Sei f
ein lineares Gleichungssystem, das z.B. mit dem Gauÿalgorithmus
gelöst werden kann.
Dierenzierbarkeit I
Math4Inf
280 / 567
Beispiel 11.32.
Sei f
: [−1, 1] → R
äquidistanten Stützstellen
f (x )
Dierenzierbarkeit I
= (1 + 25 x 2 )−1 . Wir betrachten
xi = −1 + 2 · k /12, k = 0, . . . , 12.
mit f (x )
die
Interpolationspolynom
Math4Inf
281 / 567
Bemerkung 11.33 [Kubische Splines].
: [a, b] → R eine Funktion, n ∈ N, und seien xi ∈ [a, b],
= 0, . . . , n, mit a = x0 < x1 < x2 < · · · < xn−1 < xn = b
Stützstellen. Gesucht ist nun auf jedem Intervall [xi , xi +1 ],
i = 0, . . . n − 1 ein Polynom pi vom Grad ≤ 3, so dass
Sei f
i
i) pi (xi )
= f (xi )
und pi (xi +1 )
ii) pi0 (xi +1 )
0
p
= i +1 (xi +1 ),
iii) pi00 (xi +1 )
= pi00+1 (xi +1 ),
0
= f (xi +1 ),
0
≤ i ≤ n − 1.
≤ i ≤ n − 2.
(gleiche Steigung an den Stützstellen).
0
≤ i ≤ n − 2.
(gleiche Krümmung an den Stützstellen).
iv) p000 (x0 )
= pn00−1 (xn ) = 0
(Konvention).
Zum Berechnen der pi wählt man den Ansatz:
pi (x )
= f (xi )+αi (x −xi )+βi (x −xi ) (x −xi +1 )+γi (x −xi )2 (x −xi +1 ),
und gewinnt aus den Bedingungen i)-iv) Bedingungen für die
αi , βi , γi .
Dierenzierbarkeit I
Math4Inf
282 / 567
Beispiel 11.34.
Sei f
: [−1, 1] → R
äquidistanten Stützstellen
f (x )
Dierenzierbarkeit I
= (1 + 25 x 2 )−1 . Wir betrachten
xi = −1 + 2 · k /12, k = 0, . . . , 12.
mit f (x )
die
Kubisches Spline
Math4Inf
283 / 567
Bemerkung 11.35 [Regula-Falsi].
⊆ R und f : D → R eine stetige Funktion. Seien x0 , x1 ∈ D
· f (x1 ) < 0, d.h. f (x0 ) und f (x1 ) haben verschiedenes
?
?
Vorzeichen. Dann gibt es x ∈ (x0 , x1 ) mit f (x ) = 0.
Zum iterativen Bestimmen einer Nullstelle in [x0 , x1 ]
Sei D
mit f (x0 )
i) betrachtet man die Sekante
s (x )
= f (x0 ) +
− f (x0 )
(x − x0 )
x1 − x0
f (x1 )
und berechnet ihren Schnittpunkt x2 mit der x
x2
= x1 − f (x1 ) ·
− Achse ,
also
− x0
.
f (x1 ) − f (x0 )
x1
ii) Ist f (x2 )
= 0, dann hat man eine Nullstelle gefunden. Ist
· f (x0 ) < 0 dann wendet man nun wiederum i) mit x0 , x2
sonst mit x1 , x2 .
f (x2 )
an,
Dierenzierbarkeit I
Math4Inf
284 / 567
Bemerkung 11.36 [Newtonverfahren].
⊆R
∈ D.
Sei D
x0
und f
:D→R
eine dierenzierbare Funktion, und sei
Zum iterativen Bestimmen einer Nullstelle von f
i) betrachtet nun die Tangente in x0
t (x )
= f (x0 ) + f 0 (x0 ) (x − x0 )
und berechnet ihren Schnittpunkt x1 mit der x
x1
ii) Ist f (x1 )
= 0,
= x0 −
f (x0 )
f 0 (x0 )
− Achse ,
also
(f 0 (x0 ) 6= 0).
dann hat man eine Nullstelle gefunden.
Ansonsten wendet man i) mit x1 an, also allgemein
xn
Dierenzierbarkeit I
= xn−1 −
f (xn−1 )
f 0 (xn−1 )
Math4Inf
(f 0 (xn−1 ) 6= 0).
285 / 567
Beispiel 11.37.
Sei a
>0
und f
:R→R
mit f (x )
= x2 − a
und sei x0
>0
beliebig. Dann ergibt das Newtonverfahren die Folge
2
xn
= xn−1 −
xn−1
−a
2 xn−1
=
1
2
xn−1
+
a
xn−1
.
Dies ist die Heron'sche Folge (siehe 9.18).
Bemerkung 11.38.
Im Gegensatz zur Regula-Falsi muss das Newtonverfahren (im
Allgemeinen) nicht konvergieren.
Dierenzierbarkeit I
Math4Inf
286 / 567
Denition 11.39 [Fixpunkt].
Sei D
⊆ R,
und sei f
Fixpunkt von f , falls
Funktion. x
?
∈D
eine Funktion. x
?
∈ D ist Fixpunkt
− x ist.
: D → R eine
?
?
f (x ) = x .
heiÿt
Bemerkung 11.40.
Sei D
⊆ R,
und sei f
:D→R
?
genau dann, wenn x Nullstelle der Funktion f (x )
Denition 11.41 [Kontraktion].
: [a, b] → R
∈ [a, b] gilt:
Sei f
x, y
eine Funktion, und sei c
< 1,
so dass für alle
|f (x ) − f (y )| ≤ c |x − y |.
Dann heiÿt f eine Kontraktion auf [a, b ].
Bemerkung 11.42.
< 1, und sei f : [a, b] → R eine dierenzierbare Funktion mit
|f 0 (x )| ≤ c für alle x ∈ [a, b]. Dann ist f eine Kontraktion auf [a, b].
Sei c
Dierenzierbarkeit I
Math4Inf
287 / 567
Satz 11.43 [Fixpunktsatz von Banach ].
34
: [a, b] → R eine Kontraktion, und sei x ? ∈ [a, b] ein Fixpunkt.
Für jeden Startwert x0 ∈ [a, b ] konvergiert die Folge xn = f (xn−1 )
?
?
gegen x . Zudem ist x der einzige Fixpunkt von f in [a, b ].
Sei f
34 Stefan Banach, 1892-1945
Dierenzierbarkeit I
Math4Inf
288 / 567
Taylor- und Potenzreihen
Denition 12.1 [Taylorpolynom ].
35
Sei D
?
x
⊆ R,
∈D
Tn (x )
und sei f
:D→R
eine Funktion, die an der Stelle
mindestens n-mal dierenzierbar ist. Dann heiÿt
=
n (k ) ?
X
(x )
f
k =0
k!
(x − x ? )k
= f (x ? ) + f 0 (x ? ) (x − x ? ) +
f
00 (x ? )
2
(x − x ? )2 + · · · +
f
(n) (x ? )
n!
(x
?
das zu f gehörige Taylorpolynom vom Grad n an der Stelle x ,
?
bzw. mit Entwicklungspunkt x . Man schreibt daher auch
?
manchmal Tn (x ; x ).
35 Brook Taylor, 1685-1731
Taylor- und Potenzreihen
Math4Inf
289 / 567
Bemerkung 12.2.
T1 (x ) ist gerade die Tangente an der Stelle x
? (siehe 11.3).
Beispiel 12.3.
Sei f (x )
= sin(x ).
f
(k )
Dann ist
(
(−1)k /2 sin(x )
:k
(x ) =
(
k
−
1)/2
(−1)
cos(x )
:k
gerade
ungerade
.
= 0 ergibt sich somit f (k ) (0) = 0,
= (−1)(k −1)/2 für k ungerade. Damit ist
?
sin(x ) an der Stelle x = 0 gegeben durch
Für den Entwicklungspunkt x
?
(k ) (0)
falls k gerade und f
das Taylorpolynom von
Tn (x )
=x−
x
3
3!
+
b(n−1)/2c
=
X
k =0
Taylor- und Potenzreihen
x
5
5!
−
(−1)k ·
x
7
7!
+ · · · + (−1)b(n−1)/2c
x
2
k +1
(2 k + 1)!
Math4Inf
x
n
n!
.
290 / 567
Bemerkung 12.4.
⊆ R, und sei f : D → R eine Funktion, die an der Stelle
∈ D mindestens n-mal dierenzierbar ist. Dann ist Tn (x ) das
Sei D
x
?
eindeutig bestimmte Polynom g vom Grad n mit der Eigenschaft,
dass
g
Taylor- und Potenzreihen
(k )
(x ? ) = f (k ) (x ? ),
k
= 0, . . . , n .
Math4Inf
291 / 567
Denition 12.5 [Restglied].
⊆ R, und sei f : D → R eine Funktion, die an der Stelle
∈ D mindestens n-mal dierenzierbar ist. Der Fehler
Sei D
x
?
Rn (x )
= f (x ) − Tn (x )
heiÿt Restglied.
Satz 12.6 [Taylor].
Sei D
⊆ R,
und sei f
:D→R
(n + 1)-mal
eine
stetig
dierenzierbare Funktion. Dann gilt:
|Rn (x )| = |f (x ) − Tn (x ? ; x )| ≤
wobei M so gewählt ist, dass |f
Taylor- und Potenzreihen
M
(n + 1)!
(n+1) (x )|
≤M
Math4Inf
|x − x ? |n+1 ,
für alle x
∈ D.
292 / 567
Beispiel 12.7.
: R → R mit f (x ) = sin(x ), x ? = 0 und n = 11. Dann
(12) (x ) = sin(x ), und somit gilt die Fehlerabschätzung
f
Sei f
|R11 (1/2)| = | sin(1/2) − T11 (0; 1/2)| ≤
Taylor- und Potenzreihen
Math4Inf
1
(12)!
ist
|1/2|12 < 10−12 .
293 / 567
Denition 12.8 [Landausymbole ].
36
Sei D
⊆ R,
seien f
, g : D → R,
und sei x
?
∈ D.
i) f heiÿt von Ordnung groÿ O von g für x gegen x ? falls es
Konstanten M
> 0, δ > 0
gibt, so dass für x
∈ (x ? − δ, x ? + δ)
gilt
f (x ) g (x ) < M .
Man schreibt dann f
= O(g )
für x
→ x ?.
In diesem Fall
wächst f höchstens so schnell wie g . Die Bedingung ist
| gf ((xx )) | < M gilt.
= O(g ) für x → x ? falls
f (x ) < M.
lim
x →x ? g (x ) sicherlich erfüllt, falls limx →x ?
dann schreibt man f
36 Edmund Georg Hermann Landau, 1877-1938
Taylor- und Potenzreihen
Math4Inf
Ist x
?
= ±∞,
294 / 567
ii) f heiÿt von Ordnung klein o von g für x gegen x ? falls
f (x ) = 0.
lim x →x ? g (x ) Man schreibt dann f
= o (g )
für x
→ x ?.
In diesem Fall
wächst f (echt) langsamer als g .
Taylor- und Potenzreihen
Math4Inf
295 / 567
Bemerkung 12.9.
Mit dieser Notation ist also
f (x )
Taylor- und Potenzreihen
= Tn (x ) + O((x − x ? )n+1 ).
Math4Inf
296 / 567
Denition 12.10 [Taylorreihe].
Sei D
⊆ R,
und sei f
?
Funktion. Sei x
:D→R
∈ D.
eine beliebig oft dierenzierbare
Die Reihe
T∞ (x )
=
∞
(k ) (x ? )
X
f
k!
k =0
(x − x ? )k
?
heiÿt Taylorreihe mit Entwicklungspunkt x . Man schreibt auch
manchmal T∞
(x ? ; x ).
Beispiel 12.11.
Sei f (x )
=
1
1−
x
und es ist f (x )
Taylor- und Potenzreihen
und x
?
= 0.
= T∞ (x )
Dann ist
n
X
T∞ (x )
=
für |x |
<1
x
k,
k =0
(siehe 9.24).
Math4Inf
297 / 567
Denition 12.12 [Potenzreihen].
(an )n∈N0 eine Folge reeller (bzw. komplexer) Zahlen
(bzw. ∈ C). Für x ∈ R (bzw. ∈ C) heiÿt die Reihe
Sei
∞
X
k =0
ak (x
und x
?
∈R
− x ? )k
?
Potenzreihe mit Entwicklungspunkt x .
Bemerkung 12.13.
Jede Taylorreihe ist eine Potenzreihe.
Lemma 12.14.
P∞
? k
k =0 ak (x − x ) für
(absolut) für alle x ∈ R mit
Konvergiert die Potenzreihe
dann konvergiert sie
ein x1
∈ R,
|x − x ? | < |x1 − x ? |.
Taylor- und Potenzreihen
Math4Inf
298 / 567
Denition 12.15 [Supremum/Inmum].
Sei A
a
≤u
⊆ R.
für alle a
A, falls l
i) s
Ein Element u
≤a
∈R
∈ A.
∈R
heiÿt obere Schranke von A, falls
Ein Element l
für alle a
∈R
heiÿt untere Schranke von
∈ A.
heiÿt Supremum von A im Zeichen s
= sup A,
falls s die
kleinste obere Schranke von A ist.
ii) r
∈R
heiÿt Inmum von A im Zeichen r
= inf A,
falls r die
gröÿte untere Schranke von A ist.
iii) Falls keine oberen (unteren) Schranken existieren, dann setzt
man sup A
iv) Ist s
=∞
(inf A
= sup A < ∞
= −∞).
und s
∈ A,
dann heiÿt s maximales
Element (Maximum) von A, und man schreibt s
v) Ist r
= inf A > −∞
und r
∈ A,
dann heiÿt r minimales
Element (Minimum) von A, und man schreibt r
Taylor- und Potenzreihen
= max A.
Math4Inf
= min A.
299 / 567
Beispiel 12.16.
1. Sei A
= (0, 1).
Dann ist sup A
=1
und inf A
2. Sei A
= [0, 1].
Dann ist max A
=1
und min A
3. inf
N=1
Taylor- und Potenzreihen
und sup N
= 0.
= 0.
= ∞.
Math4Inf
300 / 567
Denition 12.17 [Konvergenzbereich, -radius].
?
Folge reeller Zahlen, x ∈ R, und
P∞(an )n∈N0 eine
?
k
k =0 ak (x − x ) die zugehörige Potenzreihe.
Sei
C
= {x ∈ R :
∞
X
k =0
ak (x
− x ? )k
konvergiert
}
heiÿt Konvergenzbereich der Potenzreihe, und
ρ = sup{|x − x ? | : x ∈ C }
heiÿt der Konvergenzradius der Potenzreihe.
Beispiel 12.18.
Für die Potenzreihe
C
Taylor- und Potenzreihen
P∞ k
k =0 x
(Entwicklungspunkt x
= {x ∈ R : |x | < 1}
und
Math4Inf
?
= 0)
ist
ρ = 1.
301 / 567
SatzP 12.19.
Sei
∞
k =0 ak (x
− x ? )k
eine Potenzreihe mit Konvergenzradius
ρ.
Dann ist die Reihe
i) absolut konvergent für alle x
ii) divergent für alle x
SatzP 12.20.
Sei
∞
k =0 ak (x
und es sei ak
− x ? )k
6= 0
∈R
∈R
mit |x
−
mit |x
?
x |
− x ? | < ρ,
und
> ρ.
eine Potenzreihe mit Konvergenzradius
für fast alle k
∈ N0 .
ρ,
Existiert der Grenzwert
limk →∞ |ak /ak +1 | (∞ zugelassen), dann ist
ak .
ρ = lim k →∞ ak +1 Taylor- und Potenzreihen
Math4Inf
302 / 567
Beispiel 12.21.
P∞ 1 k
k =1 k x , also ak = 1/k , ist
ak = lim k + 1 = 1.
lim
k →∞ ak +1 k →∞ k
Für die Potenzreihe
ρ = 1, und die Reihe konvergiert
{x ∈ R : |x | < 1}. Am Rand dieses Bereiches erhalten wir für
= 1 die divergente harmonische Reihe, und für x = −1 die
Somit ist der Konvergenzradius
für
x
konvergente alternierende harmonische Reihe (siehe 9.22, 9.31).
Also ist der Konvergenzbereich dieser Reihe gegeben durch
C
Taylor- und Potenzreihen
= {x ∈ R : −1 ≤ x < 1}.
Math4Inf
303 / 567
SatzP 12.22.
Sei
∞
k =0 ak (x
− x ? )k
eine Potenzreihe mit Konvergenzradius
Existiert der Grenzwert limk →∞
ρ=
Beispiel 12.23.
Für die Potenzreihe
k
|ak | (∞
1
limk →∞
Ist der Grenzwert 0, dann ist
bestimmte Divergenz), dann
p
p
k
|ak |
ρ = ∞, und
ist ρ = 0.
ρ.
zugelassen), dann gilt
.
ist der Grenzwert
∞
(also
P∞ k k
k
k =0 k x , also ak = k , ist
p
|ak | = lim k = ∞.
lim
k →∞
k →∞
k
Somit ist der Konvergenzradius
nur für x
ρ = 0,
d.h. die Reihe konvergiert
= 0.
Taylor- und Potenzreihen
Math4Inf
304 / 567
Bemerkung 12.24.
i) Vorsicht! Auch wenn die Taylorreihe T∞ (x ) einer Funktion
f (x ) an einer Stelle x̂ konvergiert, muss nicht unbedingt
gelten: T∞ (x̂ )
= f (x̂ ).
ii) Die Taylorreihe konvergiert genau für diejenigen x aus dem
Konvergenzbereich gegen f (x ), für die das Restglied aus
(12.5) gegen 0 konvergiert mit n
Taylor- und Potenzreihen
→ ∞.
Math4Inf
305 / 567
Satz 12.25.
Einige Taylorreihen und ihr Konvergenzradien
i)
1
1
x=
iii) e
=
−x
ii) ln(x )
∞
X
=
k,
x
?
k =0
∞
X
(−1)k −1
k =1
∞
X
1
k =0
iv) sin(x )
=
v) cos(x )
=
Taylor- und Potenzreihen
x
k!
x
k
k,
∞
X
x
?
k =0
= 0, ρ = 1,
(x − 1)k ,
(2 k )!
x
?
= 1, ρ = 1,
x
?
= 0, ρ = ∞,
= 0, ρ = ∞,
(−1)k
2 k +1
x
,
(2 k + 1)!
k =0
∞
X
(−1)k
ρ:
x
2
k,
x
?
Math4Inf
= 0, ρ = ∞,
306 / 567
Satz 12.26.
Eine Potenzreihe g (x )
=
P∞
? k
k =0 ak (x − x )
ist innerhalb ihres
Konvergenzbereiches beliebig oft stetig dierenzierbar. Die
Ableitungen können durch gliedweises Dierenzieren erhalten
werden, d.h.
g
0
(x ) =
∞
X
k =1
k ak (x
−x
?
)k −1 =
und der Konvergenzbereich von g
∞
X
k =0
(k + 1) ak +1 (x − x ? )k ,
0 (x ) ist gleich dem
Konvergenzbereich von g (x ).
Taylor- und Potenzreihen
Math4Inf
307 / 567
Beispiel 12.27.
cos(x )
0
= (sin(x )) =
∞
X
(−1)k
2 k +1
x
(2 k + 1)!
!0
k =0
∞
X
(−1)k
2k
(2 k + 1)
=
x
(2 k + 1)!
k =0
∞
X
(−1)k 2 k
=
x
.
(2 k )!
k =0
Taylor- und Potenzreihen
Math4Inf
308 / 567
Integralrechnung I
Denition 13.1 [Zerlegung].
⊂ R ein Intervall. Eine Menge Z = {x0 , x1 , . . . , xn } mit
= x0 < x1 < x2 · · · < xn = b heiÿt Zerlegung von [a, b] bzgl. den
Stützstellen x0 , x1 , . . . , xn .
Sei [a, b ]
a
Denition 13.2 [Ober-, Untersumme].
: [a, b] → R eine beschränkte Funktion, und sei
= {x0 , . . . , xn } eine Zerlegung von [a, b]. Dann heiÿt
Pn−1
1. Uf (Z ) =
i =0 (xi +1 − xi ) · inf {f (x ) : x ∈ [xi , xi +1 ]}
Sei f
Z
Untersumme von f bzgl. Z .
2. Of (Z )
=
Pn−1
i =0 (xi +1 − xi ) · sup{f (x ) : x ∈ [xi , xi +1 ]}
Obersumme von f bzgl. Z .
Integralrechnung I
Math4Inf
309 / 567
Bemerkung 13.3.
Sei f
: [a, b] → R
eine beschränkte Funktion.
1. Für jede Zerlegung Z von [a, b ] gilt Uf (Z )
2. Sind Z1 , Z2 Zerlegungen von [a, b ] mit Z1
Uf (Z2 )
≥ Uf (Z1 )
und
≤ Of (Z ).
⊆ Z2 ,
Of (Z2 )
dann gilt
≤ Of (Z1 ).
3. Für zwei beliebige Zerlegung Z1 , Z2 von [a, b ] gilt
Uf (Z1 )
≤ Of (Z2 ).
Bemerkung 13.4.
Insbesondere sind Untersummen nach oben beschränkt, und
Obersummen nach unten.
Integralrechnung I
Math4Inf
310 / 567
Denition 13.5 [(Riemann )-Integral].
37
Sei f
: [a, b] → R
1. Uf
eine beschränkte Funktion.
= sup{Uf (Z ) : Z
Zerlegung von [a, b ]} heiÿt
(Riemann'sches) Unterintegral von f über [a, b ].
2. Of
= inf {Of (Z ) : Z
Zerlegung von [a, b ]} heiÿt
(Riemann'sches) Oberintegral von f über [a, b ].
3. f heiÿt (Riemann-) integrierbar, falls Uf
= Of .
4. Ist f (Riemann-) integrierbar, dann heiÿt das Unterintegral Uf
(bzw. Oberintegral Of ) das (Riemann-) Integral von f (x ) über
[a, b]
und wird mit
Z b
a
f (x ) dx
bezeichnet. Abkürzend schreibt man auch nur
37 Georg Friedrich Bernhard Riemann, 1826-1866
Integralrechnung I
Math4Inf
Rb
a f.
311 / 567
Notation 13.6.
Rb
Für ein Integral
a f (x ) dx
heiÿt die Funktion f der Integrand, x
heiÿt die Integrationsvariable und a, b heiÿen die
Integrationsgrenzen.
Integralrechnung I
Math4Inf
312 / 567
Satz 13.7.
Seien f
, g : [a, b] → R
integrierbar über [a, b ], und sei
α ∈ R.
Dann
gilt
i)
αf
und f
+g
sind integrierbar, und es ist:
Z b
a
ii) f
·g
Z b
αf = α
a
Z b
f und
a
Z b
(f + g ) =
a
Z b
f
+
a
g.
ist integrierbar.
Bemerkung 13.8.
, g : [a, b] → R integrierbar
∈ [a, b], dann ist
Seien f
alle x
Z b
a
Insbesondere ist im Falle f (x )
Rb
a f ≥ 0.
Integralrechnung I
f
≤
≥0
über [a, b ]. Ist f (x )
≤ g (x )
für
Z b
a
g.
für alle x
Math4Inf
∈ [a, b],
auch
313 / 567
Lemma 13.9.
: [a, b] → R
Sei f
eine beschränkte Funktion, und sei c
∈ [a, b].
Dann ist f über [a, b ] integrierbar, genau dann wenn f sowohl über
[a, c ]
als auch über [c , b ] integrierbar ist, und es gilt dann:
Z b
a
Z c
f
=
a
Z b
f
+
c
f
.
Lemma 13.10.
Sei f
: [a, b] → R
beschränkt. Dann sind die folgenden Aussagen
äquivalent:
i) f ist integrierbar über [a, b ].
ii) Zu jedem
Of (Z )
Integralrechnung I
> 0 existiert
− Uf (Z ) < .
eine Zerlegung Z von [a, b ], so dass
Math4Inf
314 / 567
Beispiel 13.11.
Nicht jede beschränkte Funktion ist integrierbar. Sei f
(
mit f (x )
=
∈Q
0,
x
1,
sonst
. Dann ist Uf
=0
und Of
: [0, 1] → R
= 1.
Satz 13.12.
Sei f
: [a, b] → R
eine Funktion.
i) Ist f monoton, dann ist f integrierbar.
ii) Ist f stetig, dann ist f integrierbar.
Integralrechnung I
Math4Inf
315 / 567
Satz 13.13 [Mittelwertsatz der Integralrechnung].
Es seien f
für alle x
, g : [a, b] → R stetige Funktionen, und es
∈ [a, b]. Dann gibt es ein x ? ∈ [a, b] mit
Z b
a
(f · g )(x ) dx = f (x ? ) ·
Z b
a
Korollar 13.14.
Sei f
: [a, b] → R
stetig. Dann gibt es ein x
Z b
a
f (x ) dx
?
sei g (x )
≥0
g (x ) dx .
∈ [a, b]
mit
= f (x ? ) · (b − a).
Denition 13.15.
Sei f
: [a, b] → R
Z c
Integralrechnung I
c
integrierbar. Dann setzen wir
f (x ) dx
Z c
=0
und
d
f (x ) dx
Math4Inf
=−
Z d
c
f (x ) dx
316 / 567
Denition 13.16 [Stammfunktion].
Seien f
0
F
, F : [a, b] → R
=f,
zwei Funktion. Ist F dierenzierbar mit
dann heiÿt F Stammfunktion von f .
Satz 13.17 [Hauptsatz der Dierential- und
Integralrechnung].
: [a, b] → R eine
: [a, b] → R mit
Sei f
F
stetige Funktion. Die Funktion
Z x
F (x )
=
a
f (t ) dt
ist Stammfunktion von f .
Integralrechnung I
Math4Inf
317 / 567
Lemma 13.18.
: [a, b] → R eine Stammfunktion der Funktion f : [a, b] → R.
: [a, b] → R genau dann eine (weitere) Stammfunktion
von f , wenn es ein c ∈ R gibt, mit G (x ) = F (x ) + c für alle
x ∈ [a, b ].
Sei F
Dann ist G
Die Stammfunktion ist also nur bis auf eine Konstante eindeutig
bestimmt.
Korollar 13.19.
Sei f
: [a, b] → R
Dann gilt:
stetig, und sei F eine Stammfunktion von f .
Z b
a
Integralrechnung I
f (x ) dx
= F (b) − F (a).
Math4Inf
318 / 567
Notation 13.20.
Sei F Stammfunktion von f
: [a, b] → R.
Dann setzt man
b
= F (b) − F (a).
a
F (x )
Integralrechnung I
Math4Inf
319 / 567
Denition 13.21 [Bestimmtes und Unbestimmtes
Integral].
Sei f
: [a, b] → R
integrierbar. Eine Stammfunktion F von f heiÿt
auch unbestimmtes Integral von f und wird mit
Z
f (x ) dx
(bzw.
R
f ) bezeichnet. Manchmal versteht man unter dem
unbestimmten Integral auch die Menge aller Stammfunktionen, und
schreibt (relativ unpräzise)
Z
f (x ) dx
= F (x ) + C ,
wobei F eine Stammfunktion ist, und C deutet die Menge aller
Konstanten an.
Hingegen nennt man das Integral
Rb
a f (x ) dx
mit gegebenen
Integrationsgrenzen a, b auch bestimmtes Integral.
Integralrechnung I
Math4Inf
320 / 567
Beispiel 13.22.
Für n
∈ N0
ist
Z
x
Integralrechnung I
n dx =
x
n +1
n
+1
Math4Inf
(+C ).
321 / 567
Satz 13.23.
P
Sei f (x )
=
∞
k =0 ak (x
Konvergenzradius
ρ.
− x ? )k
eine Potenzreihe mit
Dann ist auch die Funktion F (x ) die durch
gliedweises Integrieren der Potenzreihe entsteht, d.h.
F (x )
=
∞
X
k =0
konvergent in
ak
k
+1
(x − x ? )k +1 ,
{x ∈ R : |x − x ? | < ρ},
und F (x ) ist Stammfunktion
von f (x ).
Integralrechnung I
Math4Inf
322 / 567
Satz 13.24 [Einige Stammfunktionen].
Funktion
Stammfunktion
∈R
∈ R, a 6= −1
x 6= 0
c , wobei c
a
x , a
x
−1 ,
ex
x
a ,
∈ R,
sin(x )
cos(x )
Integralrechnung I
a
a
>0
·x
x +1
a +1
ln(|x |)
ex
a
ln(a)
− cos(x )
sin(x )
c
a
x
Math4Inf
323 / 567
Satz 13.25 [Substitutionsregel].
Sei g
: [a, b] → R
stetig dierenzierbar, und f
stetige Funktion mit Stammfunktion F . Dann
Stammfunktion von
(f ◦ g ) · g 0 (x )
Z b
f (g (x ))
a
Hier wurde y
= g (x )
0
: g ([a, b]) → R
ist F ◦ g
eine
und es gilt
· g (x ) dx =
Z g (b )
g (a )
f (y ) dy .
substituiert, und mit der informellen
Schreibweise
dy
dx
=
dg
dx
= g 0 (x )
bzw. dy
= g 0 (x )dx
kann man sich auch (für das unbestimmte Integral) merken
Z
f (g (x ))
Integralrechnung I
· g 0 (x ) dx =
Math4Inf
Z
f (y ) dy .
324 / 567
Beispiele 13.26.
R 2/π
− sin(x12/x ) dx .
: [1/π, 2/π] → R mit g (x ) = 1/x . Dann ist
0
2
g stetig dierenzierbar mit Ableitung g (x ) = −1/x . Die Funktion
f (x ) = sin x ist auf [π/2, π] = g ([1/π, 2/π]) stetig mit
Stammfunktion − cos x . Somit ist
Z 2/π
Z 2/π
sin(1/x )
0
−
f (g (x )) · g (x ) dx
dx =
2
1/π
1/π
Sei g
x
1/π
Z g (2/π)
=
Z
f (y ) dy
=
π/2
sin y dy
π
g (1/π)
Z π
π
sin y dy = cos(y )
=−
π/2
π/2
= cos(π) − cos(π/2) = −1.
Integralrechnung I
Math4Inf
325 / 567
Bemerkung 13.27.
Z
f
0 (x )
f (x )
= ln(|f (x )|) + C .
Beispiel 13.28.
Z b
a
Integralrechnung I
tan x dx
Z b
=
a
sin x
cos x
dx
b
= − ln(| cos x |) .
a
Math4Inf
326 / 567
Satz 13.29 [Partielle Integration].
Es sei g
: [a, b] → R
stetig dierenzierbar und f
mit Stammfunktion F . Dann ist F
f
· g + F · g0
Z b
a
f (x )
·g
: [a, b] → R
stetig
Stammfunktion von
und es gilt
b Z b
0
· g (x ) dx = (F (x ) · g (x )) −
F (x ) · g (x ) dx .
a
a
Bzw. man kann sich diese Regel auch merken als
Z
u
Integralrechnung I
0
·v
Z
= (u · v ) −
Math4Inf
u
· v 0.
327 / 567
Beispiel 13.30.
Rb
a cos(x ) · x dx . Mit g (x ) = x , f (x ) = cos(x )
0
g (x ) = 1, F (x ) = sin(x ) erhalten wir
1. Wir betrachten
und so
Z b
a
cos(x )
· x dx =
Z b
a
f (x )
· g (x ) dx
b Z b
0
= (F (x ) · g (x )) −
F (x ) · g (x ) dx
a
a
b Z b
sin(x ) dx
= (sin(x ) · x ) −
a
a
= (sin(b) b − sin(a) a) − (− cos(b) + cos(a))
= sin(b) b − sin(a) a + cos(b) − cos(a).
Insbesondere ist sin(x ) x
+ cos(x )
(eine) Stammfunktion von
cos(x ) x .
Integralrechnung I
Math4Inf
328 / 567
Rb
a ln(x ) dx . Mit g (x ) = ln(x ), f (x ) = 1
0
g (x ) = 1/x , F (x ) = x erhalten wir
2. Wir betrachten
so
Z b
a
ln(x ) dx
Z b
=
a
· g (x ) dx
b Z b
0
= (F (x ) · g (x )) −
F (x ) · g (x ) dx
a
a
b Z b
1
x ·
= (x ln(x )) −
dx
x
a
a
= (b ln(b) − a ln(a)) − (b − a).
Insbesondere ist x ln(x )
Integralrechnung I
f (x )
und
−x
(eine) Stammfunktion von ln(x ).
Math4Inf
329 / 567
Denition 13.31 [Uneigentliche Integrale].
∈ R ∪ {−∞}, b ∈ R ∪ {∞}
: (a, b) → R eine Funktion.
Sei a
f
und c
1. Ist f auf jedem Teilintervall [c , d ]
∈ (a, b).
⊂ [c , b),
Weiterhin sei
also c
≤ d < b,
also a
< d ≤ c,
integrierbar und existiert der Grenzwert
Z d
2.
lim
f (x ) dx
d →b c
Rb
so bezeichnet man ihn mit
c f (x ) dx .
Ist f auf jedem Teilintervall [d , c ] ⊂ (a, c ],
integrierbar und existiert der Grenzwert
Z c
so bezeichnet man ihn
Integralrechnung I
lim
f (x ) dx
d →a d
Rc
mit
a f (x ) dx .
Math4Inf
330 / 567
3. Existieren die Grenzwerte
Z c
lim
d →a d
f (x ) dx und
Z d
lim
d →b c
f (x ) dx
so setzt man
Z b
a
Integralrechnung I
f (x ) dx
Z c
=
a
f (x ) dx
Math4Inf
Z b
+
c
f (x ) dx .
331 / 567
Beispiel 13.32.
1. Für s
>1
Z d
1
1
dx
xs
R∞
1
x dx . Für d ∈ [1, ∞) ist
d
1
1
1 1
=
−
1
.
=
1 − s x s −1 1−s
d s −1
betrachten wir
s
1
1
Wegen
1
lim
d s −1
d →∞ 1 − s
ist
Z
1
Für 0
Integralrechnung I
≤s≤1
∞
1
1
xs
dx
−1
=
Z d
=
lim
d →∞
1
1
1
−s
1
xs
· (−1) =
dx
=
1
s
−1
1
s
−1
.
existiert der obige Grenzwert nicht.
Math4Inf
332 / 567
2. Für 0
≤s≤1
1
Z
d
1
xs
betrachten wir
dx
R1
0
1
x
s
1
=
=
1 − s x s −1 d
1
dx . Für d
1
1
1
∈ (0, 1]
1
−s
1
ist
− s −1
d
.
Wegen
1
lim
d →0 1 − s
ist
Z
0
Für 1
Integralrechnung I
<s
1
1
xs
1
1
− s −1
d
=
Z
dx
=
lim
d →0
1
1
1
1
d xs
−s
dx
· (1) =
=
1
1
−s
1
1
−s
.
existiert der obige Grenzwert nicht.
Math4Inf
333 / 567
Satz 13.33 [Konvergenzkriterium für Integrale].
: (a, b) → R mit g (x ) ≥ 0. Existiert das Integral
Rb
a g (x ) dx undR ist |f (x )| ≤ g (x ) für alle x ∈ (a, b), dann
b
existiert auch
a f (x ) dx . Man sagt, das g eine (konvergente)
i) Sei g
Majorante von f ist.
: (a, b) → R mit g (x ) ≥ 0. Existiert das Integral
Rb
und ist f (x ) ≥ g (x ) für alle x ∈ (a, b ),
a g (x ) dx nicht
Rb
existiert auch
a f (x ) dx nicht. Man sagt, das g eine
ii) Sei g
dann
(divergente) Minorante von f ist.
Integralrechnung I
Math4Inf
334 / 567
Satz 13.34 [Integralvergleichskriterium für Reihen].
Sei f
:N→
PR≥0
Die Reihe
existiert.
eine nicht-negative monoton fallende Funktion.
∞
n=1 f (n) konvergiert genau dann, wenn
R∞
1
f (x ) dx
Beispiel 13.35.
Die Reihe
Integralrechnung I
P∞ 1
n =1 n
s
konvergiert genau dann, wenn s
Math4Inf
> 1.
335 / 567
Satz 13.36 [Einfache numerische
Integrationsmethoden].
a
∈ N. Sei xi = a + b−
n · i,
i = 0, . . . , n die äquidistante Unterteilung [a, b ] in n + 1
Rb
Stützstellen. Als Näherung für
a f (x ) dx wird betrachtet
Sei f [a, b ]
→R
integrierbar, und sei n
1. Rechteckregel:
T0 (f
, n) =
2. Trapezregel:
T1 (f
38
3. Simpsonregel
T2 (f
, n) =
, n) =
: n
n −1
X
b−a
n −1
X
b−a
n
i =0
≥2
(n−2)/2
X
i =0
b
n
i =0
·
· f (xi )
f (xi )
+ f (xi +1 )
2
gerade
−a
n
38 Thomas Simpson, 1710-1761
Integralrechnung I
·
f (x2 i )
+ 4 f (x2 i +1 ) + f (x2 i +2 )
3
Math4Inf
336 / 567
Bemerkung 13.37.
Diese Integrationsmethoden entstehen dadurch, dass
1. bei der Rechteckregel f auf jedem Intervall [xi , xi +1 ] durch die
konstante Funktion g (x )
= f (xi )
approximiert wird, also durch
ein Polynom vom Grad 0,
2. bei der Trapezregel f auf jedem Intervall [xi , xi +1 ] durch die
Gerade (Sekante)
g (x )
= f (xi ) +
f (xi +1 )
− f (xi )
(x − xi )
xi +1 − xi
approximiert wird. Dies ist gerade das Interpolationspolynom
aus (11.31) vom Grad 1 an den Stützstellen xi und xi +1 .
Integralrechnung I
Math4Inf
337 / 567
3. bei der Simpsonregel f auf jedem Intervall [x2 i , x2 i +1 , x2 i +2 ]
durch das Polynom 2.ten Grades
g (x )
(x − x2i +1 )(x − x2i +2 )
f (x2i )
(x2i − x2i +1 )(x2i − x2i +2 )
(x − x2i )(x − x2i +2 )
+
f (x2i +1 )
(x2i +1 − x2i )(x2i +1 − x2i +2 )
(x − x2i )(x − x2i +1 )
f (x2i +2 )
+
(x2i +2 − x2i )(x2i +2 − x2i +1 )
=
approximiert wird. Dies ist gerade das Interpolationspolynom
aus (11.31) vom Grad 2 an den Stützstellen x2i , x2i +1 , x2i +2 .
Integralrechnung I
Math4Inf
338 / 567
Bemerkung 13.38.
Betrachtet man zur Approximation Polynome vom Grad n, so führt
dies zu den sogenannten Newton-Cotes
39 Isaac Newton, 1643-1727
40 Roger Cotes, 1682-1716
Integralrechnung I
Math4Inf
39 40
Formel n-ten Grades.
339 / 567
Denition 13.39 [Kurve (parameterisierte)].
Eine (parameterisierte) Kurve im
c
: [a, b] → Rn
Rn
ist eine Abbildung
der Form
t
c1 (t )
c2 (t )
7→ .
..
cn (t )
ci (t ) heiÿen die Komponentenfunktionen.
Beispiel 13.40.
i) c
: [−1, 1] → R2
mit c (t )
=
ii) c
: [0, 2π] → R2
mit c (t )
=
iii) c
: [a, b] → R
3
mit c (t )
=
√ −t
.
1−t 2
a cos(t ) , a, b
b sin(t )
> 0.
(Ellipse)
(r cos(t ), r sin(t ), t )| , r
> 0.
(Schraubenlinie)
Integralrechnung I
Math4Inf
340 / 567
Denition 13.41 [Tangentialvektor, Länge einer
Kurve].
Sei c
: [a, b] → Rn ,
und seien die Komponentenfunktionen ci (t )
stetig dierenzierbar. Dann heiÿt
0
c1 (t )
c 0 (t )
2
ċ (t ) = .
..
0
cn (t )
Tangentialvektor (Geschwindigkeitsvektor), und
Z b
a
kċ (t )k dt =
Z bq
a
(c10 (t ))2 + (c20 (t ))2 + · · · + (cn0 (t ))2 dt
0
die Länge der Kurve c (t ). Oft wird auch für ci (t ) die Bezeichnung
ċi (t ) verwendet.
Integralrechnung I
Math4Inf
341 / 567
Fourierreihen
Denition 14.1 [Trigonometrisches Polynom].
Sei T
>0
und
Tn (x )
ω = 2π/T .
=
a0
2
+
n
X
k =1
Eine Funktion Tn
(ak
mit a0 , a1 , . . . , an , b1 , . . . , bn
cos(k
∈R
:R→R
ω x ) + bk
sin(k
der Form
ω x ))
heiÿt trigonometrisches Polynom
vom Grad n.
Bemerkung 14.2.
Tn ist periodisch mit Periode T , d.h.
Tn (x
+ T ) = Tn (x )
für alle x
∈ R.
Es genügt daher solch ein Polynom auf dem Intervall
[− T2 , T2 ]
(oder auch [0, T ]) zu untersuchen.
Fourierreihen
Math4Inf
342 / 567
Beispiel 14.3.
T3 (x )
=
1
4
−
2
π
2
cos(2 π x )
−
2
9π 2
cos(6π x )
ist ein trigonometrisches Polynom vom Grad 3 mit a0
a1
= − π22 ,
a2
= 0,
a3
= − 9π2 2
und b1
= b2 = b3 = 0.
=
1
,
2
Die Periode
beträgt 1.
T3 (x )
Fourierreihen
Math4Inf
343 / 567
Denition 14.4 [Fourierpolynom ,
Fourierkoezienten].
41
> 0 und
sei n ∈ N.
Sei T
und
ak
bk
=
=
f
2
T
2
T
: [−T /2, T /2] → R
Z T /2
− T /2
f (t ) cos(k
ω t ) dt ,
k
= 0, . . . , n
f (t ) sin(k
ω t ) dt ,
k
= 1, . . . , n
Z T /2
− T /2
eine integrierbare Funktion,
heiÿen die Fourierkoezienten von f , und
Fn (x )
=
a0
2
+
n
X
k =1
(ak
cos(k
ω x ) + bk
sin(k
ω x ))
heiÿt das Fourierpolynom n-ten Grades von f . Hierbei ist wieder
ω = 2π/T .
41 Jean Baptiste Joseph Fourier, 1768-1830
Fourierreihen
Math4Inf
344 / 567
Satz 14.5.
Seien k , l
∈ N,
T
>0
und
Z T /2
− T /2
cos(k
ω x)
cos(l
ω = 2π/T .
ω x ) dx =
Dann gilt:
Z T /2
− T /2
(
=
Z T /2
− T /2
Fourierreihen
cos(k
ω x ) dx =
sin(k
T /2
k
0
k
Math4Inf
sin(l
ω x ) dx
=l
,
6= l
Z T /2
− T /2
ω x)
sin(k
ω x ) dx = 0.
345 / 567
Satz 14.6.
Ist f (x ) eine gerade Funktion, so ist bk
f (x ) eine ungerade Funktion so ist ak
= 0, k = 1, . . . , n,
= 0, k = 0, . . . , n.
und ist
Beispiel 14.7.
Das Fourierpolynom 3-ten Grades der Funktion
f
: [−1/2, 1/2] → R
F3 (x )
=
mit f (x )
1
4
−
2
π2
= |x |
ist das Polynom (siehe (14.3))
cos(2 π x )
−
2
9π 2
cos(6π x ).
F3 (x )
Fourierreihen
Math4Inf
346 / 567
Denition 14.8 [Fourierreihe].
Sei T
> 0, ω = 2π/T ,
und sei f
: [−T /2, T /2] → R
eine
integrierbare Funktion mit Fourierkoezienten ak , bk . Dann heiÿt
F∞ (x )
=
a0
2
+
∞
X
k =1
(ak
cos(k
ω x ) + bk
sin(k
ω x ))
die Fourierreihe von f .
Fourierreihen
Math4Inf
347 / 567
Beispiel 14.9.
Sei f
: [−π, π] → R
mit f (t )
Dann ist
F∞ (x )
=
1
2
+
=1
für t
∞
k
X
1 − (−1)
k =1
k
F5 (x )
Fourierreihen
>1
π
und f (t )
=0
für t
≤ 0.
sin(k x ).
F25 (x )
Math4Inf
348 / 567
Denition 14.10 [Skalarprodukt und Norm von
Funktionen].
Sei C [a, b ] der Vektorraum der stetigen Funktionen auf dem
Intervall [a, b ]
⊂ R.
hf , g i =
Für f
Z b
a
, g ∈ C [a, b]
sei
f (x ) g (x ) dx , und
kf k =
p
hf , f i.
Bemerkung 14.11.
hf , g i
ist ein Skalarprodukt auf C [a, b ] (siehe (6.25)) und
kf k
eine
Norm (siehe (6.28)).
Fourierreihen
Math4Inf
349 / 567
Satz 14.12.
Die Funktionen
1
√
2π
,
cos(k x )
√
π
,
sin(k x )
√
π
,
∈N
k
bilden ein Orthonormalsystem (siehe (6.40) und Satz 14.5) in
C [−π, π]. Insbesondere gilt für
g (x )
P
= c20 + nk =1 (ck
2
cos(k x )
kg k = π
Fourierreihen
+ dk
2
c0
2
+
sin(k x ))
n
X
k =1
Math4Inf
!
2
ck
2
+ dk
.
350 / 567
Satz 14.13 [Approximation durch Fourierpolynome].
Sei f
∈ C [−π, π]
mit Fourierpolynom Fn , und sei Tn ein beliebiges
trigonometrisches Polynom vom Grad n. Dann gilt
i)
kf − Fn k ≤ kf − Tn k.
ii)
kf − Fn k2 = kf k2 − π
iii) limn→∞ kf
a02
2
+
Pn
2
2
a
+
b
k =1 k
k .
2
− Fn k = 0
(Konvergenz der Fourierreihe im quadratischen Mittel gegen
f ).
iv) Ist f in x ? dierenzierbar, dann gilt F∞ (x ? )
2 P
a
∞
2
2
v) kf k2 = π 20 +
(
a
+
b
)
k =1 k
k
= f (x ? ).
(Parsevalsche Gleichung).
Fourierreihen
Math4Inf
351 / 567
Teil III
Mathematik III
Math4Inf
352 / 567
Dierenzierbarkeit II
Denition 15.1 [Reellwertige Funktion mehrerer
Variablen].
Eine (reellwertige) Funktion von mehreren Variablen ist eine
Abbildung
f
: D ⊆ Rn → R,
(x1 , . . . , xn ) 7→ f (x1 , . . . , xn ),
wobei D eine Teilmenge des
x
geschrieben, und so f
(x)
Rn
(x1 , . . . , xn )
f (x1 , . . . , xn ).
ist. Statt
anstelle von
wird auch oft
Bemerkung 15.2.
Für eine Funktion f
: D ⊆ R2 → R
ist der Graph
{(x, f (x)) : x ∈ D }
ein 3-dimensionales Gebilde (Gebirge). I.A. für f
(n + 1)-dimensionales
Dierenzierbarkeit II
: D ⊆ Rn → R
ein
Gebilde.
Math4Inf
353 / 567
Beispiel 15.3.
i) f
: R2 → R
mit f
(x) = f (x1 , x2 ) = 2 − x12 − x22 .
ii) f
: R2 → R
mit f
(x) = f (x1 , x2 ) = 1 − min{|x1 |, |x2 |}.
Dierenzierbarkeit II
Math4Inf
354 / 567
Denition 15.4 [Grenzwert einer Folge von Vektoren].
Eine Folge
bezeichnet
x?
(xk )k ∈N0 , xk ∈ Rn , heiÿt konvergent gegen x? ∈ Rn ,
?
als limk →∞ xk = x , falls der Abstand zwischen xk und
kxk − x? k =
q
(xk ,1 − x?1 )2 + (xk ,2 − x?2 )2 + · · · + (xk ,n − x?n )2
gegen 0 konvergiert, d.h.
?
?
lim x = x ⇔ lim kxk − x k = 0.
k →∞ k
k →∞
Man schreibt auch
xk → x? .
Bemerkung 15.5.
xk = x? ist also gleichbedeutend damit, dass jede
?
Koordinate xk ,i gegen xi konvergiert, 0 ≤ i ≤ n. Insbesondere
limk →∞
übertragen sich die Eigenschaften von Folgen reeller Zahlen aus
Kapitel
??
in kanonischer Weise auf Folgen von Vektoren
(s. z.B. Satz 9.12, Satz 9.15).
Dierenzierbarkeit II
Math4Inf
355 / 567
Denition 15.6 [Grenzwert einer Funktion].
⊆ Rn , f : D → R eine Funktion, und sei x? ∈ Rn . Wenn es
?
?
y ∈ R gibt, so dass für jede Folge (xk )k ∈N0 mit xk ∈ D \ {x }
Sei D
ein
und
gilt, dass die Folge der
?
lim x = x
k →∞ k
Funktionswerte (f (xk ))k ∈N0
konvergiert, also
lim f
k →∞
dann heiÿt y
lim f
x→x?
Hierbei ist auch y
?
= ±∞
?
(xk ) = y ? ,
? der Grenzwert von f für
dafür
gegen y
x
gegen
x? .
Man schreibt
(x) = y ? .
erlaubt, und man spricht dann von
bestimmter Divergenz (vgl. Def. 10.17).
Dierenzierbarkeit II
Math4Inf
356 / 567
Denition 15.7 [Stetigkeit].
Sei D
⊆ Rn ,
f
:D→R
eine Funktion, und sei
∗
stetig im Punkt (an der Stelle) x , falls
lim f
x→x?
x? ∈ D .
f heiÿt
(x) = f (x∗ ),
(x) existiert und ist gleich f (x? ).
(xk )k ∈N0 , xk ∈ D \ {x? }, mit
d.h. der Grenzwert limx→x? f
bedeutet, für jede Folge
limk →∞
xk = x?
Dies
gilt
lim f
k →∞
(xk ) = f ( lim xk ) = f (x? ).
k →∞
Ist die Funktion f in jedem Punkt ihres Denitionsbereiches D
stetig, dann heiÿt f stetig (vgl. Def. 10.26).
Dierenzierbarkeit II
Math4Inf
357 / 567
Bemerkung 15.8.
Auch bei den Denitionen 15.6 und 15.7 für eine Funktion mehrerer
Variablen lassen sich die bekannten Eigenschaften von Grenzwerten
und Stetigkeit einer Funktion einer Veränderlichen (s. z.B. Satz
10.22 oder Satz 10.26) in kanonischer Weise verallgemeinern.
Satz 15.9.
Seien f
, g : D ⊆ Rn → R
Funktionen, die in
x? ∈ R n
stetig sind.
Dann sind auch die Funktionen
α f (x) mit α ∈ R, f (x) ± g (x),
f (x)
, falls g (x? ) 6= 0,
g (x)
stetig in
Dierenzierbarkeit II
f
(x) · g (x),
x? .
Math4Inf
358 / 567
Denition 15.10 [Vektorwertige Funktion].
Sei D
⊂ Rn .
versteht man die Abbildung
fi : D → R,
f : D → Rm
x 7→ (f1 (x), f2 (x), . . . , fm (x)), wobei
Unter einer (vektorwertigen) Funktion
1
≤ i ≤ m,
reellwertige Funktionen sind.
Bemerkung 15.11.
i) Eine Matrix A
Rn → Rm
ii) Im Falle n
∈ Rm × n
beschreibt eine lineare Abbildung von
(vgl. Satz 6.5).
=1
erhält man gerade (parameterisierte) Kurven
(vgl. Def. 13.39).
Dierenzierbarkeit II
Math4Inf
359 / 567
Denition 15.12 [Grenzwert einer Funktion].
⊆ Rn , f : D → Rm eine Funktion, und sei x? ∈ Rn .
∈ Rm gibt, so dass für jede Folge (xk )k ∈N0 mit
xk ∈ D \ {x? } und
?
lim x = x
k →∞ k
Sei D
?
ein y
gilt, dass die Folge der Funktionswerte
konvergiert, also
lim
k →∞
dann heiÿt
y?
lim
x→x?
Mit anderen Worten:
y?
f
für
x
≤i ≤m
Dierenzierbarkeit II
y?
gegen
x? .
Man schreibt
f (x) = y? .
ist der Grenzwert von
?
genau dann, wenn yi der Grenzwert von
1
gegen
f (xk ) = y? ,
der Grenzwert von
dafür
(f (xk ))k ∈N0
Wenn es
fi
für
f für x gegen x?
x gegen x? und für
ist (vgl. Def. 15.6).
Math4Inf
360 / 567
Denition 15.13 [Stetigkeit].
Sei D
⊆ Rn , f : D → Rm
eine Funktion, und sei
∗
stetig im Punkt (an der Stelle) x , falls
lim
x→x?
d.h. der Grenzwert limx→x?
bedeutet, für jede Folge
limk →∞
xk = x?
lim
f
stetig, dann heiÿt
x?
heiÿt
f (x) = f (x∗ ),
f (x)
existiert und ist gleich
(xk )k ∈N0 , xk ∈ D \ {x? },
f (x? ).
Dies
mit
gilt
k →∞
Ist die Funktion
x? ∈ D . f
f (xk ) = f (
?
lim x ) = f (x ).
k →∞ k
in jedem Punkt ihres Denitionsbereiches D
f
stetig. Mit anderen Worten:
stetig, wenn jede Funktion
fi : D → R,
1
f
ist genau dann in
≤ i ≤ n,
in
x?
stetig
ist (vgl. Def. 15.7).
Dierenzierbarkeit II
Math4Inf
361 / 567
Denition 15.14 [ε-Umgebung, oene Menge].
i) Für
ii)
x? ∈ R n
und
ε>0
B (x
?
heiÿt
, ε) = {x ∈ Rn : kx − x? k < ε}
ε-Umgebung von x? . Geometrisch ist dies die oene Kugel
?
mit Radius ε und Mittelpunkt x .
n
?
Eine Menge D ⊆ R heiÿt oen, falls es für alle x ∈ D ein
ε>0
gibt mit B (x
? , ε)
⊆ D.
Bemerkung 15.15.
Um nun (zunächst) für Funktionen f
: D ⊆ Rn → R
einen
Ableitungsbegri zu denieren, greifen wir die geometrische
Interpretation im Falle n
=1
(s. Bem. 11.3) auf. Anstatt die
Funktion (bzw. ihren Graphen) durch eine Tangente zu
approximieren, möchten wir nun f an einer Stelle
x?
durch eine
Hyperebene approximieren (s. Bem. 5.9).
Dierenzierbarkeit II
Math4Inf
362 / 567
Denition 15.16 [Partielle Ableitung(en)].
Sei f
: D ⊆ Rn → R,
D oen, eine Funktion und
∂f
x? ∈ D .
i) Unter der partiellen Ableitung ∂ x (x? ) von f nach xi in einem
i
Punkt
x?
versteht man die Ableitung von f nach der Variablen
xi , während die übrigen Variablen als Konstante betrachtet
werden. Formell bedeutet dies, dass der Grenzwert
?
?
f (x + h ei ) − f (x )
∂f ?
(x ) = lim
∂ xi
h
h→0
existieren muss, wobei
ei = (0, . . . , 0, 1, 0, . . . , 0)|
den i -ten
Einheitsvektor bezeichnet (s. Def. 5.23).
Dierenzierbarkeit II
Math4Inf
363 / 567
ii) Ist f in jedem Punkt
x? ∈ D
partiell nach xi dierenzierbar,
dann heiÿt f partiell nach xi dierenzierbar, und die Funktion
∂f
:D→R
∂ xi
mit x
7→
∂f
(x)
∂ xi
heiÿt partielle Ableitung von f nach xi .
iii) Ist f partiell nach xi dierenzierbar für 1
≤ i ≤ n,
dann heiÿt f
partiell dierenzierbar.
iv) f heiÿt stetig partiell dierenzierbar, falls zusätzlich alle
partiellen Ableitungen
∂f
∂ xi stetig sind.
Bemerkung 15.17.
Im Gegensatz zu Satz 11.5 sind partiell dierenzierbare Funktionen
nicht notwendigerweise stetig.
Dierenzierbarkeit II
Math4Inf
364 / 567
Denition 15.18 [Gradient].
Sei f
: D ⊆ Rn → R,
D oen, eine partiell dierenzierbare
Funktion. Dann heiÿt der Vektor
grad f (x)
=
Gradient von f im Punkt
x.
∂f
∂f
(x), . . . ,
(x)
∂ x1
∂ xn
Bemerkung 15.19.
Seien f
, g : D ⊆ Rn → R,
D oen, partiell dierenzierbare
Funktionen. Dann gilt die Produktregel (vgl. Satz 11.6 iii))
grad (f
Dierenzierbarkeit II
· g )(x) = g (x) · grad f (x) + f (x) · grad g (x).
Math4Inf
365 / 567
Denition 15.20 [Höhere partielle Ableitungen].
Sei f
: D ⊂ Rn → R,
D oen, eine partiell dierenzierbare
Funktion. Sind alle partiellen Ableitungen
∂f
∂ xi
:D→R
selbst
wieder partiell dierenzierbar, so heiÿt f zweimal partiell
dierenzierbar, und man schreibt statt
∂ ∂∂xf
∂ xj
i
∂2f
∂ xj ∂ xi
für die partielle Ableitung nach xj der partielle Ableitung nach xi .
Entsprechend sind höhere (k -te) partielle Ableitung deniert
∂k f
∂ xi ∂ xi
k
Dierenzierbarkeit II
1
k−
. . . ∂ xi1
Math4Inf
.
366 / 567
Satz 15.21 [Schwarz ].
42
: D ⊆ Rn → R, D oen,
dann gilt für 1 ≤ i , j ≤ n
Ist f
zweimal stetig partiell dierenzierbar,
∂2f
∂2f
=
.
∂ xj ∂ xi
∂ xi ∂ xj
Entsprechende Aussagen gelten für höhere (k -te) partielle
Ableitungen, wenn f eine k -mal stetig partiell dierenzierbare
Funktion ist.
42 Hermann Amandus Schwarz, 1843-1921
Dierenzierbarkeit II
Math4Inf
367 / 567
Denition 15.22 [(totale) Dierenzierbarkeit].
Sei
f : D ⊆ Rn → Rm ,
D oen, eine Abbildung.
?
(total) dierenzierbar, falls es eine Matrix A(x )
dass
lim
x→x?
x? )
heiÿt in
∈ Rm × n
x? ∈ D
gibt, so
f (x) = f (x? ) + A(x? ) (x − x? ) + r (x)
mit
A(
f
x)
= 0.
kx − x ? k
r(
heiÿt die Ableitung oder Dierential von
Dierenzierbarkeit II
Math4Inf
f
in
x? .
368 / 567
Denition 15.23 [Jacobi -Matrix].
43
Sei
f : D ⊆ Rn → Rm ,
D oen, eine partiell dierenzierbare
fi sind partiell
(m × n)-Matrix
∂f ?
∂ f1
?
1
∂ x1 (x ) . . .
∂ x (x )
∂f ?
2 (x ) . . . ∂ f2 (x? )
∂x
∂ x1
?
Jf (x ) =
.
.
...
...
.
∂f
∂f
?
?
∂ x1 (x ) . . .
∂ x (x )
Abbildung, d.h. alle Koordinaten-Funktionen
x? ∈ D .
dierenzierbar, und sei
Die
n
n
m
m
n
heiÿt Jacobi-Matrix oder auch Funktional-Matrix.
Bemerkung 15.24.
Ist m
= 1,
x? ) = grad f (x? ).
dann ist Jf (
43 Carl Gustav Jacob Jacobi, 1804-1851
Dierenzierbarkeit II
Math4Inf
369 / 567
Satz 15.25.
f : D ⊆ Rn → Rm , D oen, und sei x? ∈ D .
i) Ist f in x? dierenzierbar mit Ableitung A(x? ). Dann ist f in x?
?
?
stetig und es ist Jf (x ) = A(x ).
ii) Ist fi in x? stetig partiell dierenzierbar für 1 ≤ i ≤ m, dann ist
f in x? dierenzierbar.
Sei
Korollar 15.26.
Ist f
: D ⊆ Rn → R,
D oen, stetig partiell dierenzierbar, dann ist
f stetig.
Satz 15.27 [Kettenregel (vgl. Satz 11.6 v))].
Sei
g : C ⊆ Rn → Rm ,
f:D
⊆ Rm → Rk ,
C oen, in x
?
∈C
dierenzierbar, und sei
g(C ) ⊆ D , und es sei f in g(x? )
k
?
Verknüpfung f ◦ g : C → R in x
D oen, mit
dierenzierbar. Dann ist die
dierenzierbar, und es gilt:
x? ) = Jf (g(x? )) · Jg (x? ).
Jf ◦g (
Dierenzierbarkeit II
Math4Inf
370 / 567
Denition 15.28 [Lokale Extrema (vgl. Def. 11.17)].
Sei D
⊆ Rn
und f
:D→R
eine Funktion.
i) lokales Maximum, falls ein
f
(x) ≤ f (x? )
für alle
ii) lokales Minimum, falls ein
f
(x) ≥ f (x? )
>0
>0
für alle
x? ∈ D
heiÿt
existiert, so dass
x ∈ B (x? , ) ∩ D .
existiert, so dass
x ∈ B (x? , ) ∩ D .
iii) globales Maximum, falls
f
(x) ≤ f (x? )
für alle
x ∈ D.
für alle
x ∈ D.
iv) globales Minimum, falls
f
(x) ≥ f (x? )
v) Lokale/globale Minima oder Maxima werden als lokale/globale
Extrema bzw. Extremwerte der Funktion bezeichnet.
Dierenzierbarkeit II
Math4Inf
371 / 567
Denition 15.29 [Abgeschlossene, kompakte Menge].
i) X
ii) X
⊆ Rn
⊆ Rn
heiÿt abgeschlossen, falls
Rn \ {X }
oen ist.
heiÿt kompakt, falls X abgeschlossen und beschränkt
(d.h. es gibt ein M
>0
mit
kx k ≤ M
für alle x
∈ X)
ist.
Bemerkung 15.30.
Für n
=1
kann man sich kompakte Mengen als die Vereinigung von
endlich viele abgeschossenen Intervallen vorstellen.
Satz 15.31 [vgl. Satz 10.33].
Jede stetige Funktion f
⊆ D ihr
x̃, x̂ ∈ [a, b] mit
Menge M
: D ⊆ Rn → R
nimmt auf einer kompakten
Maximum und Minimum an, d.h. es gibt
(x̃) = max{f (x) : x ∈ M }, und
f (x̂) = min{f (x) : x ∈ M }.
f
Dierenzierbarkeit II
Math4Inf
372 / 567
Satz 15.32 [vgl. Satz 11.18].
Sei D
⊆ Rn
Besitzt f in
oen, und sei f
x? ∈ D
:D→R
partiell dierenzierbar.
ein lokales Extremum, dann ist grad f
(x? ) = 0.
Denition 15.33 [Hesse -Matrix].
44
Sei D
⊆ Rn
oen, und sei f
:D→R
x? ∈ D
dierenzierbare Funktion. Für
eine 2-mal stetig partiell
heiÿt die symmetrische
(n × n)-Matrix
∂2f
?
∂ x1 ∂ x1 (x )
∂2f
?
∂ x1 ∂ x2 (x )
Hf
(x? ) =
.
.
.
∂2f
?
∂ x1 ∂ xn (x )
Hesse-Matrix von f in
∂2f
?
∂ x2 ∂ x1 (x )
∂2f
?
∂ x2 ∂ x2 (x )
...
...
.
.
.
...
∂2f
?
∂ x2 ∂ xn (x )
...
∂2f
?
∂ xn ∂ x1 (x )
∂2f
?
∂ xn ∂ x2 (x )
.
.
.
∂2f
?
∂ x ∂ x (x )
n
n
x? .
44 Otto Hesse, 1811-1874
Dierenzierbarkeit II
Math4Inf
373 / 567
Satz 15.34 [(vgl. Satz 11.18 ii), iii) und Satz 7.42)].
Sei D
⊂ Rn
: D → R eine 2-mal stetig partiell
?
?
Sei x ∈ D mit grad f (x ) = 0.
oen, und sei f
dierenzierbare Funktion.
i) Ist Hf (x? ) positiv denit, dann ist
ii) Ist Hf (x? ) negativ denit, dann
x? ein lokales Minimum.
?
ist x ein lokales Maximum.
iii) Ist Hf (x? ) weder positiv noch negativ semi-denit
(d.h. indenit), dann ist
Dierenzierbarkeit II
x?
kein lokales Extremum.
Math4Inf
374 / 567
Satz 15.35 [Lokale Extrema unter Nebenbedingungen].
Sei D
⊆ Rn
dierenzierbare Funktionen.
x? ∈ M
, g : D → R stetig partiell
n
Sei M = {x ∈ R : g (x ) = 0}
oen, und seien f
x? ) 6= 0.
mit grad g (
Ferner sei
x?
x) = 0,
(Minimum) von f unter der Nebenbedingung g (
ein
f
> 0,
und sei
ein lokales Maximum
d.h. es gibt
so dass gilt
(x) ≤ f (x? )
(bzw. f (x) ≥ f (x? ))
Dann gibt es ein
λ∈R
λ
x ∈ B (x? , ) ∩ D ∩ M .
mit
grad f (x
Man nennt
für alle
?
einen Lagrange
) = λ grad g (x? ).
45
-Multiplikator.
45 Joseph-Louis Lagrange, 1736-1813
Dierenzierbarkeit II
Math4Inf
375 / 567
Integralrechnung II
Denition 16.1 [Quader].
Für n
Q
∈N
und ai , bi
∈ R, ai ≤ bi ,
1
≤ i ≤ n,
heiÿt Q
⊂ Rn
mit
= [a1 , b1 ]×[a2 , b2 ]×· · ·×[an , bn ] = {x ∈ Rn : ai ≤ xi ≤ b1 ,
Quader (mit Kantenlängen bi
− ai ,
1
≤ i ≤ n).
1
≤ i ≤ n}.
Das Volumen
vol(Q ) des Quaders ist gegeben durch
vol(Q )
= (b1 − a1 ) · (b2 − a2 ) · . . . · (bn − an ).
Bemerkung 16.2.
i) Ist n
= 1,
ii) Für n
=2
so ist ein Quader ein abgeschlossenes Intervall.
ist ein Quader Q ein Rechteck, und vol(Q ) ist der
Flächeninhalt von Q .
Integralrechnung II
Math4Inf
376 / 567
Denition 16.3 [Zerlegung im Rn ].
⊂ Rn ein Quader. Eine Menge Z = {Q1 , . . . , Qm }
Quadern Qi ⊆ Q heiÿt Zerlegung von Q , falls
Sei Q
Q
=
m
[
i =1
von
Qi ,
und je zwei verschiedene Quader Qi , Qj überlappen sich nicht
(vgl. Def. 13.1).
Denition 16.4 [Ober-, Untersumme im Rn ].
⊂ Rn
: Q → R eine beschränkte
= {Q1 , . . . , Qm } eine Zerlegung von Q . Dann heiÿt
Pm
Uf (Z ) =
i =1 vol(Qi ) · inf {f (x ) : x ∈ Qi } Untersumme von
Sei Q
ein Quader, und sei f
Funktion. Sei
i)
bzgl. Z .
ii) Of (Z )
=
bzgl. Z .
Pm
i =1 vol(Qi ) · sup{f (x ) : x ∈ Qi }
f
Obersumme von f
(vgl. Def. 13.2)
Integralrechnung II
Math4Inf
377 / 567
Denition 16.5 [(Riemann )-Integral im Rn ].
46
Sei Q
⊂ Rn
ein Quader, und sei f
:Q→R
eine beschränkte
Funktion.
i) Uf
= sup{Uf (Z ) : Z
Zerlegung von Q } heiÿt (Riemann'sches)
Unterintegral von f über Q .
ii) Of
= inf {Of (Z ) : Z
Zerlegung von Q } heiÿt (Riemann'sches)
Oberintegral von f über Q .
iii) f heiÿt (Riemann-) integrierbar, falls Uf
= Of .
iv) Ist f (Riemann-) integrierbar, dann heiÿt das Unterintegral Uf
(bzw. Oberintegral Of ) das (Riemann-) Integral von f
Q und wird mit
Z
Q
f
(x)
über
(x) dx
bezeichnet. Abkürzend schreibt man auch nur
(vgl. Def. 13.5).
46 Georg Friedrich Bernhard Riemann, 1826-1866
Integralrechnung II
Math4Inf
R
Qf
378 / 567
Bemerkung 16.6.
: D ⊂ Rn → R
n
Menge D ⊂ R .
Im allgemeinen Fall geht man wie folgt vor: Sei f
eine beschränkte Funktion auf der beschränkten
⊆ Q und betrachte
(
f (x)
: x ∈ D,
f˜(x) =
0
: x ∈ Q \ D.
Wähle einen Quader Q mit D
f˜
:Q→R
Dann setzt man
mit
Z
D
f
(x) dx =
Z
Q
x) d x,
f˜(
falls die rechte Seite existiert.
Bemerkung 16.7.
Auch für diese Riemann-Integrale im
Rn
gelten die üblichen
Eigenschaften in kanonischer Weise (vgl. Satz 13.7, Bem. 13.8,
Lem. 13.9).
Integralrechnung II
Math4Inf
379 / 567
Denition 16.8 [Volumen einer Menge im Rn ].
Sei D
⊂ Rn
beschränkt. Dann heiÿt (falls existent)
Z
vol(D )
=
D
1d
x
das Volumen der Menge D . Man integriert also die konstante
Funktion über den Bereich.
Satz 16.9.
Jede stetige Funktion ist integrierbar auf kompakten Mengen, die
ein Volumen besitzen (z.B. Quader).
Integralrechnung II
Math4Inf
380 / 567
Satz 16.10 [Fubini ].
47
i) n
= 2:
Sei Q
= [a1 , b1 ] × [a2 , b2 ]
und f
:Q→R
integrierbar.
Dann gilt
Z
Q
f
(x) dx =
=
47 Guido Fubini, 1879-1943
Integralrechnung II
Z b2
Z b1
a2
Z b1
a1
Z b2
a1
a2
Math4Inf
!
f (x1 , x2 ) dx1
dx2
!
f (x1 , x2 ) dx2
dx1 .
381 / 567
≥ 2:
ii) n
Q
= [a1 , b1 ] × · · · × [an , bn ]
und f
:Q→R
integrierbar. Dann gilt
Z
Q
f
(x) dx
Z b
Z b
a
a
n
=
n
1
n−
···
1
n−
Z b1
a1
!
f (x1 , x2 , . . . , xn )dx1
!
···
!
dxn−1
dxn ,
wobei man auf der rechten Seite auch jede andere Reihenfolge beim
Integrieren verwenden darf.
Integralrechnung II
Math4Inf
382 / 567
Beispiel 16.11.
Sei f
: Q = [0, 1] × [0, 2] → R mit f (x1 , x2 ) = (2 − x1 x2 + x2 )
Z
Z 1 Z 2
f (x1 , x2 ) dx2
dx1
f (x) dx =
0
0
Q
Z 1 Z 2
=
(2 − x1 x2 + x2 ) dx2 dx1
0
0
Z 1
1 2 2
1
2
x2
=
2 x2 − x1 x2 +
dx1
2
2
0
0
Z 1
1
(6 − 2 x1 ) dx1 = 6 x1 − x12 = 5.
=
0
0
Integralrechnung II
Math4Inf
383 / 567
Denition 16.12 [Normalbereich].
Ein (2-dimensionaler) Normalbereich (bzgl. der x -Achse) ist eine
⊂ R2 der Form
x1
2
∈ R : a ≤ x1 ≤ b, α1 (x1 ) ≤ x2 ≤ β1 (x1 ) ;
=
Menge D
D
x2
dabei seien a
<b
und
α1 , β1 : [a, b] → R
stetige Funktionen.
Entsprechend deniert man einen Normalbereich bzgl. der y -Achse,
bzw. Normalbereiche in Dimensionen
D
≥ 3.
Z.B. ist
n
= (x1 , x2 , x3 )| ∈ R3 : a ≤ x1 ≤ b, α1 (x1 ) ≤ x2 ≤ β1 (x1 ),
o
α2 (x1 , x2 ) ≤ x3 ≤ β2 (x1 , x2 )
R3 . Hierbei sind zusätzlich
⊆ R → R stetige Funktionen.
ein Normalbereich in
α2 , β2 : U
Integralrechnung II
2
Math4Inf
384 / 567
Satz 16.13.
Sei D
⊂ R2
ein Normalbereich, und sei f
:D→R
eine
integrierbare Funktion auf D . Dann gilt:
Z
D
f
(x) d x =
Z b
a
β 1 ( x1 )
Z
α 1 ( x1 )
!
f (x1 , x2 ) d x2
d x1 .
≥ 3.
: D ⊂ R3 → R:
!
!
Eine analoge Aussage gilt für Normalbereiche in Dimension
Mit der Notation aus Denition 16.12 gilt z.B. für f
Z
D
f
(x) d x =
Integralrechnung II
Z b
a
Z
β 1 ( x1 )
α 1 ( x1 )
Z
β 2 ( x1 , x2 )
α 2 ( x1 , x2 )
Math4Inf
f (x1 , x2 , x3 ) d x3
d x2
d x1 .
385 / 567
Beispiel 16.14.
Sei T
f
:T
= {(x1 , x2 ) ∈ R2 : 0 ≤ x1 ≤ 1,
→ R mit f (x) = 2 − x12 − x22 .
Z
T
f
(x) dx =
1
Z
0
0
1
Z
1−
Z
1−
Z
x1
f (x1 , x2 ) dx2
x1
2
=
2 x2
−
0
1
Z
−
0
1
Z
≤ x2 ≤ 1 − x1 },
2
x2 x1
2
x1
−
−
1
3
dx1
2
x2
3
x2
2 (1
=
3
0
=
Integralrechnung II
5
3
5
x1
−
1
2
2
x1
−
2
3
3
x1
+
4
3
3
Math4Inf
3
2
x1
1
3
− (1 − x1 )
3
dx1
x1
1
dx1
0
− x1 ) − (1 − x1 )
− x1 − 2 x12 +
dx2
1−x1
dx1
0
Z 1
=
und sei
=
0
0
4
x1
dx1
1 5
= .
0
6
386 / 567
Satz 16.15.
: D → Rn integrierbar. Sei A ∈ Rn×n mit det A 6= 0, und sei
e ⊂ Rn mit D = A D
e + t = {A x + t : x ∈ D
e }. Dann
∈ Rn . Sei D
Sei f
t
gilt
Z
D
Insbesondere ist
(x) dx = | det A| ·
Korollar 16.16.
e
Sei D
⊂ Rn
Z
f (A x + t ) dx.
De
e ).
vol(D ) = | det A| vol(D
f
beschränkt,
λ ∈ R,
t
∈ Rn
und
e + t = {λ x + t : x ∈ D
e }.
λD
Dann gilt
e
vol(λ D
Integralrechnung II
e ).
+ t ) = |λ|n vol(D
Math4Inf
387 / 567
Satz 16.17 [Transformationssatz].
Sei f
: D → Rn
Riemann-integrierbar. Sei
e ⊂ Rn
D
Abbildung von einer Menge
e →D
T:D
eine bijektive
nach D , die stetig partiell
dierenzierbar und deren Umkehrabbildung ebenfalls stetig partiell
dierenzierbar ist. Dann gilt
Z
D
f
(x) dx =
Z
De
f
( T(x) ) · | det JT (x)| dx.
Bemerkung 16.18.
i) Für n
=1
ist dies (im wesentlichen) die Substitutionsregel aus
Satz 13.25.
ii) Ist
T(x)
eine ane Abbildung, dann erhält man gerade Satz
16.15.
Integralrechnung II
Math4Inf
388 / 567
Beispiel 16.19.
= B (0, 1) = {x ∈ R3 : kx k ≤ 1}.
e = [0, 1] × [0, 2π) × [0, π] und T : D
e → B (0, 1) mit
D
r cos φ sin ϑ
T(r , φ, ϑ) = r sin φ sin ϑ .
r cos ϑ
Volumen der Kugel D
Sei
| det JT (x)| = r 2 cos ϑ, und so
Z
Z
vol(B (0, 1)) =
1 dx =
1 | det JT (x)| dx
B (0,1)
De
Z
=
|r 2 cos ϑ| dx
De Z 1 Z 2π Z π
2
=
|r cos ϑ| d ϑ d φ
Dann ist
0
Integralrechnung II
0
d r.
0
Math4Inf
389 / 567
Z
1
Z
1
Z
2π
=
0
Z
0
=
0
=
Integralrechnung II
4
3
2π
π 2
2 r sin ϑ
dφ dr
0
Z 1
2
2
2r
dφ dr =
4πr
2
0
dr
0
1 4
π r 3 = π.
0
3
Math4Inf
390 / 567
Denition 16.20 [Vektorwertige Integrale].
Sei
f : D ⊂ Rn → Rm , und es sei jede einzelne Koordinatenfunktion
fi : D → R
≤ i ≤ m.
Riemann-integrierbar, 1
Dann ist
D f1 (x) dx
R
Z
f2 (x) dx
D
.
f (x) dx =
.
.
D
.
R
D fm (x) dx
R
Denition 16.21 [Schwerpunkt].
Sei D
⊂ Rn
mit vol(D )
> 0.
Dann heiÿt der Punkt
1
vol(D )
Z
D
x dx
der Schwerpunkt von D .
Integralrechnung II
Math4Inf
391 / 567
Beispiel 16.22.
= {(x1 , x2 ) ∈ R2 : 0 ≤ x1 ≤ 1, 0 ≤ x2 ≤ 1 − x1 }. Dann ist
vol(T ) = 1/2, und für die erste Koordinate des Schwerpunktes
(x1? , x2? ) ergibt sich
Sei T
?
x1
=
1
Z
1
2
T
Z
x1 d
x=2
Z
1
1−
Z
0
x1
x1 dx2
1
(x1 (1 − x1 )) dx1 = 2
1 2
1 3 1
1
=2
x1 − x1
= .
0
3
0
1
Z
x1
−
0
2
x1
)
dx1
3
?
Ebenso ndet man für die 2.te Koordinate x2
Integralrechnung II
dx1
0
=2
2
Math4Inf
=
1
.
3
392 / 567
Lineare Optimierung
Denition 17.1 [Konvexe Menge].
Eine Menge X
alle
λ ∈ [0, 1]
⊆ Rn
heiÿt konvex, wenn für alle
gilt
x, y ∈ X
und für
λx + (1 − λ) y ∈ X ,
d.h. mit je zwei Punkten
x, y
ist auch jeweils die Strecke zwischen
den zwei Punkten in X .
Lemma 17.2.
Seien Xi
⊆ Rm ,
1
≤ i ≤ m,
konvex. Dann ist auch
Tm
i =1 Xi
konvex.
Lemma 17.3.
n
n
⊆ Rn konvex. P
Sei c ∈ R , d ∈ R, und sei f : R → R
n
f (x) = hc, xi + d =
i =1 ci xi + d . Dann ist jedes lokale
Extremum von f : X → R ein globales Extremum.
Sei X
Lineare Optimierung
Math4Inf
mit
393 / 567
Denition 17.4 [Lineare Ungleichung, Halbraum].
Sei
a = (a1 , a2 , . . . , an )| ∈ Rn \ {0}
ha, xi ≤ b,
d.h. a1 x1
und b
∈ R.
+ a2 x2 + · · · + an xn ≤ b
heiÿt lineare Ungleichung. Geometrisch beschreibt
H
−
(a, b) = {x ∈ Rn : ha, xi ≤ b}
einen Halbraum, der von der Hyperebene
a, b) = {x ∈ Rn : ha, xi = b} begrenzt wird. Der andere durch
+
H (a, b ) induzierte Halbraum wird mit H (a, b ) bezeichnet, d.h.
H(
H
Lineare Optimierung
+
(a, b) = {x ∈ Rn : ha, xi ≥ b}.
Math4Inf
394 / 567
Bemerkung 17.5.
i)
ha, xi ≥ b
ist ebenfalls eine lineare Ungleichung, da
ha, xi ≥ b ⇔ h−a, xi ≤ −b
bzw. H
+ (a, b )
= H − (−a, −b).
ii) Eine lineare Gleichung
ha, xi = b
lässt durch zwei lineare
Ungleichungen beschreiben, nämlich mittels
ha, xi ≥ b.
ha, xi ≤ b
und
Oder anders dargestellt
a, b) = H − (a, b) ∩ H + (a, b) = H − (a, b) ∩ H − (−a, −b).
H(
Bemerkung 17.6.
a, b),
H(
Lineare Optimierung
H
+ (a, b ) und H − (a, b ) sind konvex.
Math4Inf
395 / 567
Denition 17.7 [Ungleichungssystem, Polyeder].
Seien
ai ∈ Rn
und bi
Ungleichungen
∈ R,
1
≤ i ≤ m.
hai , xi ≤ bi ,
heiÿt Ungleichungssystem. Sei
und sei
b ∈ Rm
Das System von linearen
≤ i ≤ m,
m×n die Matrix
A ∈ R
(?)
1
der Vektor mit Einträgen bi , 1
mit Zeilen
≤ i ≤ m.
Dann
a|i ,
schreibt man statt (?) auch abkürzend
A
x ≤ b.
Geometrisch beschreibt
P (A,
b) = {x ∈ Rn : A x ≤ b}
ein Polyeder.
Lineare Optimierung
Math4Inf
396 / 567
Bemerkung 17.8.
Es ist
P (A,
und daher ist ein Polyeder
m
\
(ai , bi ),
i =1
P (A, b) insbesondere
b) =
H
−
eine konvexe
Menge.
Lineare Optimierung
Math4Inf
397 / 567
Denition 17.9 [Lineares Optimierungsproblem].
Sei A
∈ Rm × n , b ∈ Rm ,
und sei
c ∈ Rn .
Ein lineares
Optimierungsproblem (LOP) ist die Aufgabe, die Kostenfunktion
(Zielfunktion)
hc, xi
zu maximieren unter der Bedingung A
x ≤ b,
d.h.,
max
{hc, xi : A x ≤ b}
max
{hc, xi : x ∈ P (A, b)} .
Bzw. es ist zu entscheiden, dass solch ein Maximum nicht existiert,
weil
i) P (A, b)
ii)
hc, xi
= ∅,
oder
unbeschränkt über P (A,
b)
ist.
c, xi)
Geometrisch ist ein LOP die Aufgabe, eine lineare Funktion (h
über einem Polyeder (P (A,
Lineare Optimierung
b))
zu maximieren.
Math4Inf
398 / 567
Bemerkung 17.10.
i) Auch entsprechende Minimierungsprobleme lassen sich als
Maximierungsprobleme formulieren, da
min
{hc, xi : x ∈ P (A, b)} = − max {h−c, xi : x ∈ P (A, b)} .
hc, xi kann man als Zielfunktion
Form hc, xi + d (für ein d ∈ R)
ii) Anstatt der linearen Funktion
auch ane Funktionen der
betrachten, da
max
Lineare Optimierung
{hc, xi + d : x ∈ P (A, b)} = max {hc, xi : x ∈ P (A, b)}+d .
Math4Inf
399 / 567
iii) Auch das Maximieren einer Funktion
hc, xi
bzgl. einem
Ungleichungssystem der allgemeinen Form
hai , xi ≤ bi ,
hai , xi ≥ bi ,
hai , xi = bi ,
1
≤ i ≤ m1 ,
m1
+ 1 ≤ i ≤ m2 ,
m2
+1≤i ≤m
lässt sich gemäÿ Bemerkung 17.5 als LOP formulieren.
Lineare Optimierung
Math4Inf
400 / 567
Denition 17.11 [Ecke].
b) ⊂ R n
∈ P (A, b) sei
Sei P (A,
x?
ein Polyeder, und seien
a|i
die Zeilen von A. Für
x? ) = {ai : hai , x? i = bi }
I(
x? )
die Menge der aktiven Bedingungen. Enthält I (
n linear
?
unabhängige Vektoren, dann heiÿt x Ecke des Polyeders P (A, b).
Satz 17.12.
∈ Rm×n , rg(A) = n, b ∈ Rm , und sei c ∈ Rn . Existiert
?
max {hc, xi : A x ≤ b}, d.h. gibt es ein x ∈ P (A, b) mit
Sei A
hc, x? i = max {hc, xi : x ∈ P (A, b)} ,
dann wird das Maximum (auch) an einer Ecke angenommen,
d.h. es gibt eine Ecke
v ∈ P (A, b)
mit
hc, vi = max {hc, xi : x ∈ P (A, b)} .
Lineare Optimierung
Math4Inf
401 / 567
Bemerkung 17.13.
Ein Polyeder P (A,
b),
A
∈ Rm × n ,
m
n
Ecken, aber es kann ungefähr m
hat nicht mehr als
(≤ mn )
n /2
Ecken haben. Das Auisten
aller Ecken ist also zu aufwendig!
Lineare Optimierung
Math4Inf
402 / 567
Bemerkung 17.14 [Geometrische Strategie zum Lösen
von LOP].
i) Finde eine (Start)-Ecke von P (A, b).
ii) Solange es möglich ist, laufe über Kanten von einer Ecke zu
einer benachbarten Ecke mit einem besseren (nicht
kleineren) Zielfunktionswert.
iii) Ist dies nicht mehr möglich, dann hat man eine optimale
Ecke/Lösung erreicht.
Lineare Optimierung
Math4Inf
403 / 567
Denition 17.15 [Standardform].
Sei A
∈ Rm × n , b ∈ Rm .
Ein LOP der Form
c, xi : A x ≤ b, x ≥ 0}
max {h
heiÿt LOP in Standardform. Hierbei steht
Ungleichungen xi
≥ 0,
1
≤ i ≤ n.
x≥0
für die n
Die Ungleichungen
x≥0
heiÿen
auch Nicht-Negativitätsbedingungen.
Lemma 17.16.
Jedes LOP mit rg(A)
=n
lässt sich in ein LOP in Standardform
formulieren.
Lineare Optimierung
Math4Inf
404 / 567
Beispiel 17.17 [LOP in Standardform].
max
− 4 x1 − 3 x2 : x1 + x2 ≤ 20; −x1 − x2 ≤ −10; −2 x1 + x2 ≤ 0;
x1 ≥ 0; x2 ≥ 0
Bemerkung 17.18 [Schlupfvariablen].
Als nächstes überführen wir unsere LOP in eine Normalform, d.h.
aus jeder Ungleichung, die keine Nicht-Negativitätsbedingung ist,
machen wir eine Gleichung durch die Addition einer nicht-negativen
Variablen (genannt Schlupfvariable):
{x ∈ Rn : ha, xi ≤ b} = {x ∈ Rn : ha, xi + y = b,
Lineare Optimierung
Math4Inf
y
≥ 0}.
405 / 567
Beispiel 17.19 [Fortsetzung].
max
− 4 x1 − 3 x2 : x1 + x2 + x3 = 20
−x1 − x2 + x4 = −10
−2 x1 + x2 + x5 = 0
x1 , x2 , x3 , x4 , x5
≥0
Schlupfvariablen sind hier x3 , x4 , x5 .
Lineare Optimierung
Math4Inf
406 / 567
Bemerkung 17.20 [Normalform].
Bezeichnet Im die m
× m-Einheitsmatrix,
dann haben wir jetzt das
LOP auf die Form gebracht
x1
..
.
n
xn
.
max hc, .. i : (A, Im )
xn+1 = b, xi ≥ 0,
xn
..
.
x1
1
o
≤i ≤n+m .
xn+m
Nach geeignetem Ändern der Bezeichnungen sind wir so bei der
Normalform eines LOP angelangt:
max
n
o
hc, xi : A x = b, x ≥ 0 ,
wobei insbesondere rg(A)
Lineare Optimierung
=m
und m
<n
Math4Inf
anzunehmen ist.
407 / 567
Lemma 17.21.
Sei
v
eine Ecke des Polyeders
m ×n ,
A ∈ R
i)
rg(A)
= m,
m
{x ∈ Rn : A x = b, x ≥ 0}
< n.
mit
Dann gilt:
v ≥ 0.
ii) Es gibt m linear unabhängige Spalten
m
X
i =1
Lineare Optimierung
vji
aj = b
i
und vj
=0
aj1 , . . . , aj
für j
Math4Inf
m
, so dass gilt
∈
/ {j1 , . . . , jm }.
408 / 567
Denition 17.22 [Basislösung].
Für eine Auswahl von m linear unabhängigen Spalten
aus A heiÿt der (eindeutig bestimmte) Vektor
m
X
i =1
wji
aj = b
i
Basislösung mit Basis
heiÿt
w
und wj
=0
aj1 , . . . , aj
m
für j
w ∈ Rn
aj1 , . . . , aj
m
mit
∈
/ {j1 , . . . , jm }.
. Ist zusätzliche
w ≥ 0,
dann
zulässige Basislösung (Ecke). Die Variablen wj1 , . . . , wjm
nennt man Basisvariablen, die übrigen Nicht-Basisvariablen.
Nicht-Basisvariablen sind immer Null.
Bemerkung 17.23.
Ein LOP ist also die Aufgabe, eine bestmögliche zulässige
Basislösung zu nden!
Lineare Optimierung
Math4Inf
409 / 567
Beispiel 17.24 [Fortsetzung].
max
n
1
1
− 4 x1 − 3 x2 : −1 −1
−2 1
1
0
0
0
1
0
0
0
1
20
x = −10 , x ≥ 0
o
0
a) Die Auswahl der letzten drei (linear unabhängigen) Spalten
führt zu der (nicht zulässigen) Basislösung
(0, 0, 20, −10, 0).
b) Wählen wir hingegen die Spalten 1,3 und 5, dann erhalten wir
die zulässige Basislösung (Ecke)
Lineare Optimierung
(10, 0, 10, 0, 20).
Math4Inf
410 / 567
Bemerkung 17.25.
Um von einer zulässigen Basislösung zur nächsten zu gelangen,
verwenden wir den Simplexalgorithmus, der in dem sogenannten
Simplextableau ausgeführt wird. Dazu bringen wir unser System in
eine Form, an der wir sofort zulässige Basislösungen ablesen können.
Sei
v
eine zulässige Basislösung mit Basis (linear unabhängigen
Spalten)
aj1 , . . . , aj
m
, und sei Aj1 ,...,jm die m
× m-Matrix
mit diesen
−1
Spalten. Durch Multiplikation mit Aj ,...,j erhalten wir die folgende
m
1
Beschreibung des LOP:
max
n
1
hc, xi : A−
j1 ,...,j
m
A
o
1
x = A−
j1 ,...,j b, x ≥ 0 .
m
−1
In den Spalten j1 , . . . jm von Aj ,...,j A steht nun die Einheitsmatrix,
m
1
−1
und da vji die i -te Komponente von Aj ,...,j
m
1
−1
(die rechte Seite) Aj ,...,j
m
1
b
b
ist, ist der Vektor
nicht negativ. In dieser Darstellung
lässt sich also sofort die zugehörige zulässige Basislösung ablesen.
Lineare Optimierung
Math4Inf
411 / 567
Beispiel 17.26 [Fortsetzung].
Es ist
A1,3,5
1
= −1
−2
1
0
0
0 ,
0
1
−1
A1,3,5
0
= 1
0
−1
1
−2
0
0 ,
1
und so
o
n
1
−1
b
,
x
≥
0
=
A
x
=
A
hc, xi : A−
1,3,5
1,3,5
1 1 0 −1 0
10
n
o
max
− 4 x1 − 3 x2 : 0 0 1 1 0 x = 10 , x ≥ 0
0 3 0 −2 1
20
max
mit zulässiger Basislösung
Lineare Optimierung
v = (10, 0, 10, 0, 20).
Math4Inf
412 / 567
Bemerkung 17.27 [Pivotieren].
i) Zwei zulässige Basislösungen
aj1 , . . . , aj
m
und
ak1 , . . . , ak
m
v
und
w
mit zugehörigen Basen
heiÿen benachbart, wenn sie sich
in genau einem Index unterscheiden. Um also zu einer
benachbarten zulässigen Basislösung von
v
zugelangen, muss
∈ {j1 , . . . , jm } gegen eine
k ∈ {1, . . . , n } \ {j1 , . . . , jm }
eine Basisvariable ji ∗
Nicht-Basisvariable
ausgetauscht
werden. Diesen Vorgang nennt man Pivotieren.
Lineare Optimierung
Math4Inf
413 / 567
ii) Nach Denition einer Basislösung
m
X
i =1
Sei nun k
vji
v
ist
aj = b.
i
∈ {1, . . . , n} \ {j1 , . . . , jm }.
Da
Basis bilden, gibt es eindeutige Skalare
m
X
i =1
Somit ist für jedes
m
X
i =1
Lineare Optimierung
aj1 , . . . , aj
αk ,i ∈ R
m
eine
mit
αk ,i aj = ak .
i
θ∈R
vji
− θ αk ,i aj + θ ak = b.
i
Math4Inf
414 / 567
Um eine (neue) benachbarte zulässige Basislösung
erhalten, die
i)
iii)
ak
θ≥0
vji
vji
und ii)
− θ αk ,i = 0
θ=
∗
− θ αk ,i ≥ 0,
für ein i
Also
Ist i
w
zu
enthält, muss gelten
∈ { 1, . . . , m }
min
1≤
i ≤m
vji
αk ,i
1
≤ i ≤ m,
und
∈ {1, . . . , m}.
: αk ,i > 0 .
ein Index für den das obige Minimum
angenommen wird, dann ist die neue Basis dadurch gegeben,
dass
i
aj ∗
i
durch
ak
ersetzt wird. Man nennt k die Pivotspalte,
∗ die Pivotzeile und
αk ,i ∗
das Pivotelement.
iii) Im wesentlichen beschreibt das Pivotieren genau das Laufen
von einer Ecke zu einer benachbarten Ecke des Polyeders
P (A,
Lineare Optimierung
b).
Math4Inf
415 / 567
Beispiel 17.28 [Fortsetzung].
Für
max
n
1
1
− 4 x1 − 3 x2 : −1 −1
−2 1
führt die Auswahl der Basisspalten
Basislösung
Spalte
a2
v = (10, 0, 10, 0, 20).
1
0
0
0
1
0
0
0
1
20
= −10 , x ≥ 0
o
0
{a1 , a3 , a5 }
zu der zulässigen
Wir möchten nun die zweite
in die Basis aufnehmen. Die Skalare
α2,i
lassen sich sofort
aus der Darstellung
n
o
1
−1
hc, xi : A−
A
x
=
A
b
,
x
≥
0
=
1,3,5
1,3,5
1 1 0 −1 0
10
n
o
max
− 4 x1 − 3 x2 : 0 0 1 1 0 x = 10 , x ≥ 0
0 3 0 −2 1
20
max
ablesen; sie bilden gerade die 2.te Spalte der Matrix.
Lineare Optimierung
Math4Inf
416 / 567
Somit erhalten wir
θ = min
10,
20
3
=
20
3
Die neue Basis besteht aus den Spalten
und i
∗
= 3.
a1 , a3 , a2 ;
2 ist die
Pivotspalte, 3 die Pivotzeile und 3 ist das Pivotelement.
Lineare Optimierung
Math4Inf
417 / 567
Die Darstellung
max
n
o
1
−1
hc, xi : A−
A
x
=
A
b
,
x
≥
0
1,3,2
1,3,2
bzgl. der neuen Basisspalten
a1 , a3 , a2
lässt sich einfach aus der
vorhergehenden Darstellung
max
o
n
−1
1
hc, xi : A−
A
x
=
A
b
,
x
≥
0
1,3,5
1,3,5
∗
ableiten. Dazu dividiert man die i -te Zeile (einschlieÿlich rechter
αk ,i ∗ , und addiert anschlieÿend geeignete Vielfache der
∗
i -te Zeile (einschlieÿlich rechter Seite) zu den übrigen Zeilen, so
∗
dass die k -Spalte der i -te Einheitsvektor wird.
Seite) durch
Lineare Optimierung
Math4Inf
418 / 567
n
o
1
−1
hc, xi : A−
A
x
=
A
b
,
x
≥
0
=
1,3,2
1,3,2
1 0 0 −1/3 −1/3
10/3
o
n
1
0 x = 10 , x ≥ 0
max
− 4 x1 − 3 x2 : 0 0 1
0 1 0 −2/3
1/3
20/3
max
Somit sind wir zu der benachbarten zulässigen Basislösung
(10/3, 20/3, 10, 0, 0)
Lineare Optimierung
gelangt.
Math4Inf
419 / 567
Bemerkung 17.29 [Relative Kosten].
i) Um zu entscheiden, welche Spalte in die Basislösung
aufgenommen werden soll, benutzen wir die Kostenfunktion
(Zielfunktion)
hc, xi,
die wir maximieren möchten. Die Kosten
(der Zielfunktionswert) der zulässigen Basislösung
aj1 , . . . , aj
m
zv
Lineare Optimierung
v
mit Basis
sind gegeben durch
=
m
X
i =1
cji vji .
Math4Inf
420 / 567
Wir betrachten nun wieder den Ansatz
m
X
i =1
Für ein geeignetes
θ≥0
m
X
i =1
vji
zw
Lineare Optimierung
= zv − θ
i =1
cji
i
sei
w die benachbarte Basislösung mit
− θ αk ,i aj + θ ak = b.
Dann sind die Kosten von
m
X
αk ,i aj = ak .
i
w
αk ,i + θck = zv + θ
Math4Inf
ck
−
m
X
i =1
!
cji
αk ,i
.
421 / 567
ii)
e
ck = ck −
m
X
i =1
cji
αk ,i
heiÿen die relativen Kosten der Spalte k bzgl. der Basis
aj1 , . . . , aj
m
. Die Kosten werden durch die Aufnahme der k -ten
Spalte in die Basis genau dann erhöht, wenn e
ck
> 0.
iii) Die relativen Kosten der Basisvariablen sind 0.
Lineare Optimierung
Math4Inf
422 / 567
Beispiel 17.30 [Fortsetzung].
Wir berechnen die relativen Kosten bzgl. der Basis
a1 , a3 , a5 ,
die
sich sofort aus der Darstellung
n
o
1
−1
hc, xi : A−
A
x
=
A
b
,
x
≥
0
=
1,3,5
1,3,5
10
1 1 0 −1 0
o
n
max
− 4 x1 − 3 x2 : 0 0 1 1 0 x = 10 , x ≥ 0
20
0 3 0 −2 1
max
ablesen lassen. Es ist
e
c2 = −3 − (−4 · 1 + 0 · 0 + 0 · 3) = 1
e
c4 = 0 − (−4 · (−1) + 0 · 1 + 0 · −2) = −4
Somit erhöht (verbessert) nur die Aufnahme der 2.ten Spalte in die
Basis die Kosten.
Lineare Optimierung
Math4Inf
423 / 567
Bemerkung 17.31
[Simplexalgorithmus/Simplextableau].
i) Für eine zulässige Basislösung
Aj1 ,...,jm , Kosten zv
= hc, vi
v
mit zugehöriger Basis(matrix)
und relativen Kostenvektor
e
c
besteht das Simplextableau aus den Einträgen
e
c
-zv
−1
Aj ,...,j A
m
1
Beispiel (Fortsetzung): Basis
Lineare Optimierung
−1
Aj ,...,j b
m
1
a1 , a3 , a5
0
1
0
-4
0
40
1
1
0
-1
0
10
0
0
1
1
0
10
0
3
0
-2
1
20
Math4Inf
424 / 567
ii) Pivotschritt:
a)
b)
Auswahl einer Pivotspalte k mit positiven relativen Kosten
e
ck > 0.
Auswahl einer Pivotzeile i ∗ , so dass
vji ∗
αk ,i ∗
= min
1≤i ≤m
Beispiel (Fortsetzung): Basis
vji
αk ,i
1
0
-4
1
1
0
0
0
1
0
3
: αk ,i > 0 .
a1 , a3 , a5
0
0
0
40
-1
0
10
1
0
10
-2
1
20
Pivotspalte 2, Pivotzeile 3 und Pivotelement 3.
Lineare Optimierung
Math4Inf
425 / 567
iii) Simplextableau updaten auf die neue Basis:
Dividieren der Pivotzeile (im Tableau) durch αk ,i ∗ .
Addieren von geeigneten Vielfachen der Pivotzeile (im Tableau)
zu den übrigen (einschlieÿlich der relativen Kostenzeile), so
dass aus der k-ten Spalte der i ∗ -te Einheitsvektor wird
(relative Kosten der k-ten Spalte sind anschlieÿend 0).
Beispiel (Fortsetzung): Basis a1 , a3 , a2
a)
b)
0
0
0
-10/3
-1/3
100/3
1
0
0
-1/3
-1/3
10/3
0
0
1
1
0
10
0
1
0
-2/3
1/3
20/3
Zulässige Basislösung
(10/3, 20/3, 10, 0, 0)
mit Kosten
−100/3.
iv) Gehe zu i).
Lineare Optimierung
Math4Inf
426 / 567
Satz 17.32.
i) Sind in einem Simplextableau alle relativen Kosten nicht
positiv, dann ist die momentane zulässige Basislösung eine
optimale Lösung des LOP.
ii) Sind in einer Pivotspalte k mit e
ck
>0
alle Einträge
αk ,i
nicht
positiv, dann existiert kein Maximum des LOP, da die Kosten
>0
hc, wi ≥ M
beliebig groÿ werden können, d.h. für jedes M
Vektoren
w
mit A
w = b, w ≥ 0,
und
gibt es
(vgl. Denition 17.9).
Bemerkung 17.33 [Anti-Zykel-Regel].
In dieser Form kann es passieren, dass der Algorithmus nicht endet
und Zykel auftreten. Dies kann daran liegen, dass die Auswahl der
Pivotzeile nicht eindeutig ist. Eine Pivotregel, die solche Zykel
vermeidet (durchbricht), ist Bland's Anti-Zykel-Regel:
i) Wähle als Pivotspalte immer die mit dem kleinsten Index.
ii) Wähle als Pivotzeile i ? immer die, so dass ji ? minimal ist.
Lineare Optimierung
Math4Inf
427 / 567
Bemerkung 17.34 [Phase-I].
Es bleibt die Frage zu klären, wie ndet man eine zulässige
Basislösung, damit der Algorithmus beginnen kann. Die Idee ist, ein
Hilfs-LOP aufzustellen, dessen optimale Lösung einfach in eine
zulässige Basislösung des ursprünglichen LOP's umzuwandeln ist.
Das Bestimmen einer zulässigen Basislösung nennt man auch
Phase-I. Sei dazu unser LOP in Standardform gegeben
c, xi : A x ≤ b, x ≥ 0} ,
max {h
A
∈ Rn × m .
Wir führen nun eine neue Variable xn+1 ein und
betrachten das Phase-I-LOP
max {xn+1
: A x − b xn+1 ≤ 0, x ≥ 0, xn+1 ≥ 0, xn+1 ≤ 1} .
Lemma 17.35.
Der optimale Wert des Phase-I-LOP ist genau dann 1, wenn es ein
x ∈ Rn
Lineare Optimierung
gibt mit A
x≤b
und
x ≥ 0.
Math4Inf
428 / 567
Bemerkung 17.36.
Das Phase-I-LOP in Normalform hat die Gestalt
xn+1
max
:
A
0
Der Vektor
−b
1
Im + 1
x=
0
1
n
+m +2
,x∈R
,x≥0 .
v = (0, . . . , 0, 0 . . . , 0, 1)|
| {z } | {z }
m
n +1
ist eine zulässige Basislösung von diesem LOP bzgl. der Basis mit
dem Spaltenindizes
?
Sei x
∈ Rn + m + 2
{n + 2 , . . . , n + m + 2 }.
eine optimale Basislösung des Problems mit
{j1 , . . . , jm+1 } die zugehörigen Basisspalten.
= 1, ist n + 1 ∈ {j1 , . . . , jm+1 }, und die Spalten der
(A, −b, Im ) mit den Indizes {j1 , . . . , jm+1 } \ {n + 1}
Kosten 1, und seien
?
Wegen xn+1
Matrix
bestimmen eine zulässige Basislösung des ursprünglichen Problems.
Lineare Optimierung
Math4Inf
429 / 567
Beispiel 17.37 [Fortsetzung].
Ausgangs-LOP:
max
− 4 x1 − 3 x2 : x1 + x2 ≤ 20; −x1 − x2 ≤ −10; −2 x1 + x2 ≤ 0;
x1 ≥ 0; x2 ≥ 0
Phase-I-LOP in Normalform:
max
x3
: x1 + x2 − 20 x3 + x4 = 0,
−x1 − x2 + 10 x3 + x5 = 0,
−2 x1 + x2 + x6 = 0,
+ x7 = 1,
x1 , . . . , x7 ≥ 0 .
x3
Lineare Optimierung
Math4Inf
430 / 567
Simplextableaus Phase-I
0
1
0
0
0
0
0
1
1
-20
1
0
0
0
0
-1
-1
0
1
0
0
0
0
10
-2
1
0
0
0
1
0
0
0
0
1
0
0
0
1
1
Pivotspalte 3, Pivotzeile 2, Pivotelement 10.
1/10
1/10
0
0
-1/10
0
0
0
-1
-1
0
1
2
0
0
0
-1/10
-1/10
1
0
1/10
0
0
0
-2
1
0
0
0
1
0
0
1/10
0
0
-1/10
0
1
1
1/10
Pivotspalte 1, Pivotzeile 4, Pivotelement 1/10.
Lineare Optimierung
Math4Inf
431 / 567
0
0
0
0
0
0
-1
-1
0
0
0
1
1
0
10
10
0
0
1
0
0
0
1
1
0
3
0
0
-2
1
20
20
1
1
0
0
-1
0
10
10
x? = (10, 0, 1, 10, 0, 20, 0) erreicht mit
{1, 3, 4, 6}. Somit ist v = (10, 0, 10, 0, 20) zulässige
Optimale Lösung
Basisspalten
Basislösung von
max
n
1
− 4 x1 − 3 x2 : −1 −1
−2 1
mit den Basisspalten
Lineare Optimierung
1
{1, 3, 5}
1
0
0
0
1
0
0
0
1
20
= −10 , x ≥ 0
o
0
(siehe Beispiel 17.24).
Math4Inf
432 / 567
Elementare Wahrscheinlichkeitsrechnung
Denition 18.1 [Zufallsexperiment].
Ein Zufallsexperiment ist ein Vorgang, der beliebig oft unter den
gleichen Bedingungen wiederholt werden kann und dessen Ergebnis
nicht mit Sicherheit vorhergesagt werden kann. Die Menge aller
möglichen (und sich gegenseitig ausschlieÿenden) Ergebnisse des
Zufallsexperiments heiÿt Ereignisraum (Ergebnisraum) und wird mit
Ω
bezeichnet.
Beispiel 18.2.
i) Würfeln:
Ω = {1 , 2 , 3 , 4 , 5 , 6 }.
ii) Lotto:
Ω=Menge
{1, . . . , 49}.
iii) Münzwurf:
der 6-elementigen Teilmengen aus
Ω = {(K)opf, (Z)ahl}.
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
433 / 567
Denition 18.3 [Ereignis].
i) Ein Ereignis A eines Zufallsexperiment ist eine Teilmenge des
Ereignisraums
Ω,
also A
⊆ Ω.
Man sagt, dass A eingetreten
ist, wenn das Ergebnis des Experiments ein Element von A ist.
ii) Ist |A|
iii) A
=Ω
iv) A
=∅
= 1,
dann heiÿt A Elementarereignis.
heiÿt sicheres Ereignis.
heiÿt unmögliches Ereignis.
Beispiel 18.4.
i) Würfeln einer Primzahl: A
= {2 , 3 , 5 }.
ii) Mindestens einmal Kopf beim zweimaligen Wurf einer Münze:
Ω = {KK , KZ , ZK , ZZ }
Elementare Wahrscheinlichkeitsrechnung
und A
= {KK , KZ , ZK }.
Math4Inf
434 / 567
Denition 18.5.
Seien A, B Ereignisse eines Zufallsexperiments mit Ereignisraum
Ω.
i) Das Ereignis A und B entspricht dem Durchschnitt A ∩ B .
ii) Das Ereignis A oder B entspricht der Vereinigung A ∪ B .
iii) Das Gegenereignis A von A entspricht dem Komplement von A
bzgl.
Ω,
d.h. A
iv) Ist A ∩ B
= ∅,
= Ω \ A.
dann heiÿen A und B disjunkt.
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
435 / 567
Denition 18.6 [Laplace -Experiment].
48
Ein Zufallsexperiment heiÿt Laplace-Experiment, falls es nur endlich
viele mögliche Elementarereignisse gibt (also
|Ω| < ∞),
und falls
jedes Elementarereignis gleich wahrscheinlich ist.
Satz 18.7.
Die Wahrscheinlichkeit P (A) eines Ereignisses A bei einem
Laplace-Experiment mit Ereignisraum
P (A)
=
|A|
=
|Ω|
Ω
ist gleich
Anzahl der für A günstigen Elementarereignisse
Anzahl aller Elementarereignisse
48 Pierre-Simon Laplace, 1749-1827
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
.
436 / 567
Denition 18.8 [Wahrscheinlichkeit(saxiome),
Kolmogorov ].
49
Die Wahrscheinlichkeit P (A) eines Ereignisses A eines
Zufallsexperiments mit Ereignisraum
Ω
muss folgende
Eigenschaften erfüllen:
i) 0
≤ P (A) ≤ 1.
ii) P (Ω)
= 1.
iii) Ist A ∩ B
iv)
Ω
= ∅,
dann ist P (A
∪ B ) = P (A) + P (B ).
zusammen mit einer Wahrscheinlichkeit P heiÿt
Wahrscheinlichkeitsraum und wird mit
49 Andrey Kolmogorov, 1903-1987
Elementare Wahrscheinlichkeitsrechnung
(Ω, P )
Math4Inf
bezeichnet.
437 / 567
Satz 18.9.
i) P (A)
= 1 − P (A),
ii) P (A ∪ B )
insbesondere ist P (∅)
= P (A) + P (B ) − P (A ∩ B )
iii) Sind Ai , 1
Ai
(Additionsregel).
≤ i ≤ m, paarweise disjunkte
∩ Aj = ∅ für i 6= j , dann ist
P (A1
iv) Ist A
⊆ B,
= 0.
Ereignisse, d.h. es gilt
∪ A2 ∪ A3 ∪ . . . ∪ Am ) =
dann ist P (A)
≤ P (B )
m
X
i =1
P (Ai ).
(Monotonität).
Bemerkung 18.10.
Sei
(Ω, P )
Ω = {ω1 , . . . , ωn }
A ⊆ Ω
Wahrscheinlichkeitsraum, und sei
Elementarereignissen
ωi .
Dann gilt für
P (A)
=
X
ωi ∈A
Elementare Wahrscheinlichkeitsrechnung
mit
P (ωi ).
Math4Inf
438 / 567
Denition 18.11 [Bedingte Wahrscheinlichkeit].
Seien A, B Ereignisse eines Zufallsexperiments mit P (A)
6= 0.
Die
Wahrscheinlichkeit von B unter der Bedingung, dass A eingetreten
ist, ist deniert als
P (B |A)
=
∩ B)
,
P (A)
P (A
und heiÿt bedingte Wahrscheinlichkeit.
Satz 18.12 [Multiplikationssatz].
Seien A, B Ereignisse eines Zufallsexperiments mit P (A), P (B )
6= 0.
Dann gilt
P (A
∩ B ) = P (A) P (B |A) = P (B ) P (A|B ).
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
439 / 567
Satz 18.13 [Satz von der totalen Wahrscheinlichkeit].
(Ω, P ) ein Wahrscheinlichkeitsraum, und seien Ai ⊆ Ω,
≤ i ≤ m, paarweise disjunkte Ereignisse mit Ω = ∪m
i =1 Ai .
gilt für B ⊆ Ω
m
X
P (Ai ) · P (B |Ai )
P (B ) =
i =1
Sei
1
Dann
Satz 18.14 [Formel von Bayes ].
50
(Ω, P ) ein Wahrscheinlichkeitsraum, und seien Ai ⊆ Ω,
m
1 ≤ i ≤ m, paarweise disjunkte Ereignisse mit Ω = ∪i =1 Ai .
gilt für B ⊆ Ω
Sei
P (Ai |B )
=
P (Ai )P (B |Ai )
P (B )
50 Thomas Bayes, 1702-1761
Elementare Wahrscheinlichkeitsrechnung
Dann
P (Ai )P (B |Ai )
= Pm
.
i =1 P (Ai ) · P (B |Ai )
Math4Inf
440 / 567
Denition 18.15 [Unabhängige Ereignisse].
Zwei Ereignisse A, B eines Zufallsexperiments heiÿen unabhängig,
falls
P (A
∩ B ) = P (A) · P (B ).
Denition 18.16 [Zufallsvariable].
Sei
Ω
ein Ereignisraum. Eine Abbildung, die jedem
Elementarereignis eine reelle Zahl zuordnet, d.h. X
ω 7→ X (ω),
heiÿt Zufallsvariable.
{X (ω) : ω ∈ Ω}
:Ω→R
mit
werden
Realisierungen der Zufallsvariable genannt.
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
441 / 567
Denition 18.17 [Verteilung].
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, und sei X
:Ω→R
eine
Zufallsvariable. Die Abbildung
V
: X (Ω) → [0, 1],
x
7→ P ({ω ∈ Ω : X (ω) = x })
heiÿt die Verteilung der Zufallsvariablen X .
Bemerkung 18.18.
Im folgenden werden wir die abkürzenden Schreibweisen verwenden:
y
X
=x
beschreibt die Menge
{ω ∈ Ω : X (ω) = x }
X
≤x
beschreibt die Menge
{ω ∈ Ω : X (ω) ≤ x }
≤X ≤x
beschreibt die Menge
{ω ∈ Ω : y ≤ X (ω) ≤ x }
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
442 / 567
Denition 18.19 [Verteilungsfunktion].
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, und sei X
:Ω→R
eine
Zufallsvariable. Die Abbildung
F
: R → [0, 1],
x
7→ P (X ≤ x )
heiÿt die Verteilungsfunktion von X .
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
443 / 567
Satz 18.20.
Sei F
: R → [0, 1]
die Verteilungsfunktion einer Zufallsvariablen X .
Dann gilt:
i) F ist monoton steigend, und es gilt
lim
x →−∞
F (x )
= 0,
lim F (x )
x →∞
= 1.
ii) F ist rechtsseitig stetig, und in jedem Punkt existieren
rechtsseitiger und linksseitiger Grenzwert:
= F (x ? ) = P (X ≤ x ? ),
lim
F (x )
lim
F (x )−
x →x ? +
lim
x →x ? −
F (x )
= P (X < x ? ).
iii)
x →x ? +
lim
x →x ? −
Elementare Wahrscheinlichkeitsrechnung
F (x )
= P (X ≤ x ? )−P (X < x ? ) = P (X = x ? ).
Math4Inf
444 / 567
Denition 18.21 [Diskrete Zufallsvariable].
Sei
(Ω, P )
: Ω → R eine
{X (ω) : ω ∈ Ω} endlich oder
ein Wahrscheinlichkeitsraum, und sei X
Zufallsvariable. Ist der Wertebereich
abzählbar unendlich, dann heiÿt X diskrete Zufallsvariable.
Bemerkung 18.22.
Ist X eine diskrete Zufallsvariable mit Wertebereich
{xi : i ∈ N},
dann ist
F (x )
= P (X ≤ x ) =
X
x ≤x
P (X
= xi ).
i
In diesem Falle ist die Verteilungsfunktion immer eine
Treppenfunktion.
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
445 / 567
Denition 18.23 [Stetige Zufallsvariable,
Dichtefunktion].
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, und sei X
:Ω→R
eine
Zufallsvariable mit Verteilungsfunktion F (x ). Gibt es eine
integrierbare, nicht negative reelle Funktion w , so dass
F (x )
= P (X ≤ x ) =
Z x
w (t ) dt ,
−∞
dann heiÿt X stetige Zufallsvariable, und w heiÿt Dichte(funktion)
der Zufallsvariablen X .
Bemerkung 18.24.
Ist X eine stetige Zufallsvariable mit Verteilungsfunktion F und
Dichte w . Dann ist F stetig, und es gilt F
P (a
0 (x )
≤ X ≤ b) = F (b) − F (a) =
= w (x ). Weiterhin ist
Z b
a
w (t ) dt ,
d.h. der Flächeninhalt unter dem Graphen von w zwischen a und b.
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
446 / 567
Satz 18.25.
Sei
(Ω, P )
Zufallsvariable. X ist stetig genau dann, wenn
alle x
: Ω → R eine
P (X = x ) = 0 für
ein Wahrscheinlichkeitsraum, und sei X
∈ R.
Denition 18.26 [Unabhängige Zufallsvariablen].
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, und seien Xi
Zufallsvariablen, 1
P
≤ i ≤ n.
((X1 ≤ x1 ) ∩ (X2 ≤ x2 ) ∩ · · · ∩ (Xn ≤ xn )) =
Elementare Wahrscheinlichkeitsrechnung
:Ω→R
X1 , . . . , Xn heiÿen unabhängig, falls
Math4Inf
n
Y
i =1
P (Xi
≤ xi ).
447 / 567
Denition 18.27 [Erwartungswert].
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, und sei X
:Ω→R
eine
Zufallsvariable. Der Erwartungswert E(X ) der Zufallsvariablen X ist
deniert als:
i) ist X diskret, dann
E(X )
=
X
x
· P (X = x ).
x ∈X (Ω)
ii) ist X stetig, dann
Z
E(X )
∞
x w (x ) dx .
=
−∞
Oft wird der Erwartungswert auch mit
Elementare Wahrscheinlichkeitsrechnung
µ
bezeichnet.
Math4Inf
448 / 567
Satz 18.28.
Ist die Dichtefunktion w einer stetigen Zufallsvariablen X
symmetrisch um einen Wert c , d.h. w (c
x
∈ R,
dann ist E(X )
− x ) = w (c + x )
für alle
= c.
Satz 18.29 [Linearität des Erwartungswerts].
Seien X , Y Zufallsvariablen und sei
E(X
α ∈ R.
Dann gilt
+ α Y ) = E(X ) + α E(Y ).
Satz 18.30.
Seien X , Y unabhängige Zufallsvariablen. Dann gilt
E(X
Elementare Wahrscheinlichkeitsrechnung
· Y ) = E(X ) · E(Y ).
Math4Inf
449 / 567
Denition 18.31 [Varianz, Standardabweichung].
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, und sei X
:Ω→R
eine
Zufallsvariable.
Var(X )
= E (X − E(X ))2
heiÿt die Varianz der Zufallsvariablen X .
Die Wurzel aus der Varianz, also
p
Var(X ) heiÿt
Standardabweichung von X . Oft wird die Varianz auch mit
die Standardabweichung mit
Elementare Wahrscheinlichkeitsrechnung
σ
σ2
bzw.
bezeichnet.
Math4Inf
450 / 567
Bemerkung 18.32.
i) Ist X diskret, dann gilt
Var(X )
X
=
(x − E(X ))2 · P (X = x ).
x ∈X (Ω)
ii) Ist X stetig, dann gilt
Z
Var(X )
∞
=
(x − E(X ))2
w (x ) dx .
−∞
iii)
Var(X )
= E(X 2 ) − ( E(X ) )2 .
iv) Sind X1 , . . . , Xn unabhängige Zufallsvariablen, dann gilt
Var(X1 + X2 + · · · + Xn )
Elementare Wahrscheinlichkeitsrechnung
= Var(X1 ) + Var(X2 ) + · · · + Var(Xn ).
Math4Inf
451 / 567
Denition 18.33 [Standardisierte Zufallsvariable].
Ist X Zufallsvariable mit Erwartungswert
heiÿt
X
?
=
X
µ
und Varianz
Dann
−µ
σ
die standardisierte (Zufallsvariable) von X . Es gilt E(X
Var(X ? )
σ2.
?)
=0
und
= 1.
Satz 18.34 [Ungleichung von Tschebysche ].
51
Sei
(Ω, P )
ein Wahrscheinlichkeitsraum, X
Zufallsvariable, und sei c
P (|X
> 0.
:Ω→R
eine
Dann gilt
− E(X )| ≥ c ) ≤
Var(X )
c2
.
In Worten: Die Wahrscheinlichkeit, dass X um mehr als c vom
2
Erwartungswert abweicht, ist nicht gröÿer als Var(X )/c .
51 Pafnuti Lwowitsch Tschebyschow, 18211894
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
452 / 567
Satz 18.35 [(Schwaches) Gesetz der groÿen Zahlen].
Seien X1 , . . . , Xn unabhängige und identisch verteilte
Zufallsvariablen mit Erwartungswert
µ
und Varianz
σ2.
Dann ist
auch das arithmetische Mittel
e
X
=
1
n
n
X
i =1
Xi
eine Zufallsvariable mit Erwartungswert
>0
µ
und Varianz
σ 2 /n.
Für
gilt
e
lim P (|X
n→∞
Elementare Wahrscheinlichkeitsrechnung
− µ| < ) = 1.
Math4Inf
453 / 567
•
Diskrete Verteilungen
Denition 18.36 [Gleichverteilung].
Ω der endliche Ereignisraum eines Laplace-Experiments,
P (ω) = 1/|Ω| für ω ∈ Ω. Die zugehörige Verteilung einer
Sei
und sei
(diskreten) Zufallsvariable X heiÿt Gleichverteilung, und es gilt
E(X )
=
1
|Ω|
X
X (ω), Var(X )
ω∈Ω
Elementare Wahrscheinlichkeitsrechnung
=
1
|Ω|
!
2
−E(X ) +
X
2
X (ω)
ω∈Ω
Math4Inf
454 / 567
Denition 18.37 [Hypergeometrische Verteilung].
Gegeben sei eine Grundmenge N , von denen M Elemente eine
bestimmte Eigenschaft haben. Man entnimmt nun eine
Stichprobe vom Umfang n ohne Zurücklegen. Sei X die
Zufallsvariable X
=
Anzahl der Elemente in der Stichprobe mit der
bestimmten Eigenschaft. Dann gilt
P (X
M N −M = k ) = k Nn−k .
n
Weiterhin gilt
E(X )
=n
M
N
Elementare Wahrscheinlichkeitsrechnung
,
Var(X )
=n
M
N
1
−
M
Math4Inf
N
−n
.
N −1
N
455 / 567
Denition 18.38 [Binomialverteilung].
52
Ein Bernoulli
-Experiment ist ein Zufallsexperiment, bei dem es
nur zwei Ausgänge gibt: Ereignis A tritt ein oder nicht. Sei p die
Wahrscheinlichkeit, mit der A eintritt. Wiederholt man ein
Bernoulli-Experiment n-mal, so spricht man von einem
Bernoulli-Experiment der Länge n. Für ein Bernoulli-Experiment der
Länge n, sei X die (diskrete) Zufallsvariable, die angibt, wie oft das
Ereignis A eingetreten ist. Dann ist X binomialverteilt und es gilt
für k
∈ { 0, . . . , n }
P (X
= k) =
n
k
p
k (1 − p )n−k .
Weiterhin gilt
E(X )
= n p,
52 Daniel Bernoulli, 1700 1782
Elementare Wahrscheinlichkeitsrechnung
Var(X )
= n p (1 − p ).
Math4Inf
456 / 567
Denition 18.39 [Poisson -Verteilung].
53
Sei
λ > 0. Eine (diskrete) Zufallsvariable
∈ N0 mit der Wahrscheinlichkeit
X , die jede natürliche
Zahl k
P (X
= k) =
λk −λ
e
k!
annimmt, heiÿt poissonverteilt. Es gilt
E(X )
Var(X )
= λ,
= λ.
Bemerkung 18.40.
Sei Xt die Anzahl gewisser Vorkommnisse im Zeitraum [0, t ]. Die
Menge von Zufallsvariablen Xt , t
Intensität
λ,
≥ 0,
heiÿt Poisson-Prozess mit
falls
P (Xt
= k) =
53 Siméon-Denis Poisson, 17811840
Elementare Wahrscheinlichkeitsrechnung
(t λ)k −t λ
e
.
k!
Math4Inf
457 / 567
Satz 18.41.
Sei X binomialverteilt bzgl. den Parametern n und p. Für n
und p
→ 0,
so dass
λ = np
lim
n→∞, p→0
(Faustregel: für n
≥ 50
P (X
und p
= k) =
≤ 0.1
λk −λ
e .
k!
kann die Binomialverteilung
gut durch die Poisson-Verteilung mit
Elementare Wahrscheinlichkeitsrechnung
→∞
konstant ist, gilt
λ = np
Math4Inf
genähert werden.
458 / 567
Denition 18.42 [(Stetige) Gleichverteilung
(Rechteckverteilung)].
Eine (stetige) Zufallsvariable X heiÿt gleichverteilt auf dem Intervall
[a, b],
wenn sie die Dichtefunktion
(
w (x )
1
b −a ,
0,
=
x
∈ (a, b),
sonst
besitzt. Es gilt
E(X )
Elementare Wahrscheinlichkeitsrechnung
=
a
+b
2
,
Var(X )
=
(b − a)2
Math4Inf
12
.
459 / 567
Denition 18.43 [Exponentialverteilung].
Sei
λ > 0.
Eine (stetige) Zufallsvariable X heiÿt exponentialverteilt,
wenn sie die Dichtefunktion
(
λ e−λ x ,
w (x ) =
0,
x
> 0,
sonst
besitzt. Es gilt
E(X )
Elementare Wahrscheinlichkeitsrechnung
=
1
λ
,
Var(X )
=
1
λ2
Math4Inf
.
460 / 567
Denition 18.44 [Normalverteilung (Gauÿverteilung)].
Eine (stetige) Zufallsvariable X heiÿt normalverteilt mit den
Parametern
µ, σ > 0,
wenn sie die Dichtefunktion
w (x )
1
1
x −µ
= √ e− 2 (
σ 2π
besitzt. Kurzschreibweise X
∼ N (µ; σ 2 ).
σ
2
)
Der Graph der
Dichtefunktion heiÿt Gauÿ'sche Glockenkurve. Es ist
E(X )
Speziell für
µ = 0, σ = 1
= µ,
Var(X )
heiÿt N (0; 1) Standardnormalverteilung.
Hier schreibt man für die Dichtfunktion
Verteilungsfunktion
= σ2.
ϕ
und für die
Φ.
Bemerkung 18.45.
Es ist
Φ(−x ) = 1 − Φ(x ).
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
461 / 567
Bemerkung 18.46.
Ist X nach N (µ; σ
2
)
verteilt, dann ist die Zufallsvariable
Z
=
X
−µ
σ
standardnormalverteilt. Ist F (x ) die Verteilungsfunktion und w (x )
die Dichtefunktion von X , dann gilt
F (x )
= Φ((x − µ)/σ)
Elementare Wahrscheinlichkeitsrechnung
und w (x )
=
1
σ
ϕ((x − µ)/σ).
Math4Inf
462 / 567
Satz 18.47.
Seien Xi , i
= 1, 2,
Erwartungswerten
unabhängige normalverteilte Zufallsvariablen mit
µi
σi2 . Dann ist X1 + X2 ebenfalls
µ1 + µ2 und Varianz σ12 + σ22 .
und Varianzen
normalverteilt mit Erwartungswert
Satz 18.48 [Zentraler Grenzwertsatz].
Seien X1 , . . . , Xn unabhängige und identisch verteilte
Zufallsvariablen mit Erwartungswert
sei
e=
X
1
n
µ
n
X
i =1
und Varianz
nach N (µ; σ
Weiterhin
Xi
das arithmetische Mittel der Zufallsvariablen. Für n
2
σ2.
/n) verteilt. Genauer: Die
e − µ)/(σ/√n) ist für
(X
Zufallsvariable
→∞
e
ist X
standardisierte
n
→∞
standardnormalverteilt, d.h.
lim P
n→∞
Elementare Wahrscheinlichkeitsrechnung
−µ
√ ≤z
σ/ n
e
X
!
= Φ(z ).
Math4Inf
463 / 567
Bemerkung 18.49.
i) Sei X binomialverteilt mit den Parametern n und p, und
Verteilungsfunktion FB . Sei n p und n (1
n p (1
− p ) ≥ 9).
− p)
groÿ (Faustregel:
Dann ist
FB (x )
≈Φ
+ 1/2 − n p
p
n p (1 − p )
x
!
ii) Sei X poissonverteilt mit den Parametern
λ und
λ groÿ (Faustregel: λ ≥ 9).
x + 1/2 − λ
√
FP (x ) ≈ Φ
λ
Verteilungsfunktion FP . Sei
ist
Elementare Wahrscheinlichkeitsrechnung
Math4Inf
Dann
464 / 567
Statistik I
Denition 19.1 [p-Quantile, Median].
Sei X eine Zufallsvariable mit Verteilungsfunktion F . Für p
heiÿt xp
∈R
F (xp )
p-Quantil von X . Ein Quantil zu p
Statistik I
∈ (0, 1)
mit
=p
= 1 /2
Math4Inf
heiÿt Median.
465 / 567
Denition 19.2 [Zufallsstichprobe].
Eine Zufallsstichprobe vom Umfang n ist eine Folge X1 , . . . , Xn von
unabhängigen, identisch verteilten Zufallsvariablen. Die Xi heiÿen
auch Stichprobenvariablen.
Beispiel 19.3.
X =Abfüllgewicht einer Tafel Schokolade; In einer Stichprobe vom
Umfang 10, könnten X1 , . . . , X10 etwa die Werte annehmen:
100, 97, 95, 103, 101, 105, 98, 99, 99, 91.
Bemerkung 19.4.
Im allgemeinen werden Stichproben ohne Zurücklegen gezogen.
Wir nehmen aber an, dass das Ziehen eines einzelnen Elementes die
Grundmenge nur geringfügig verändert, d.h. wir können annehmen,
dass die Xi unabhängig voneinander sind.
Statistik I
Math4Inf
466 / 567
Bemerkung 19.5 [Schätzungen].
Oft möchte man von einer gegebenen Grundmenge (z.B. Menge
aller an einem Tag produzierten Schokoladen) einen gewissen
Parameter (Gröÿe)
Θ
wissen (z.B. durchschnittliche Abfüllgewicht,
also E (X )). Da die genaue Bestimmung zu aufwendig ist,
versuchen wir
Θ
mit Hilfe einer Stichprobe zu schätzen
(z.B. arithmetisches Mittel einer Stichprobe).
Denition 19.6 [Schätzfunktion].
Eine Funktion T (X1 , . . . , Xn ) der Stichprobenvariablen heiÿt
Stichprobenfunktion , und ist selbst eine Zufallsvariable. Wird sie
zum Schätzen eines Parameters
Θ
verwendet, nennt man sie
Schätzfunktion (oder Schätzer).
Statistik I
Math4Inf
467 / 567
Beispiel 19.7.
i)
ii)
Θ = Erwartungswert
eines Merkmales X ; Schätzfunktion:
Pn
1
X
arithmetisches
Mittel einer Stichprobe
X =
i
n i =1
Θ = Varianz eines Merkmales X ; Schätzfunktion:
Pn
2
1
2
S =
n−1 i =1 (Xi − X ) Varianz einer Stichprobe
(empirische Varianz).
iii)
Θ=
Anteil eines Merkmales X ; Schätzfunktion: P
=
Anteil
des Merkmales in einer Stichprobe (empirischer Anteil).
Statistik I
Math4Inf
468 / 567
•
Prüfverteilungen
Denition 19.8 [χ -Verteilung].
2
Seien Z1 , . . . , Zm unabhängige und standardnormalverteilte
Zufallsvariablen. Dann heiÿt die Verteilung der Zufallsvariablen
X
χ2 -Verteilung mit
Es ist E (X ) = m,
= Z12 + Z22 + · · · + Zm2
m Freiheitsgraden.
Var(X )
= 2 m,
und die Dichtefunktion ist
gegeben durch
w (x )
1
x
= m /2
2
Γ(m/2)
2 −1 e−x /2 .
m
Bemerkung 19.9.
Die Gammafunktion
Statistik I
Γ : R>0 → R ist deniert
Z ∞
x −1 e−t dt .
Γ(x ) =
t
Math4Inf
0
als
469 / 567
Satz 19.10.
Sei X das arithmetische Mittel einer zufälligen Stichprobe
X1 , . . . , Xn vom Umfang n eines normalverteilten Merkmals X mit
Standardabweichung
S
eine
Statistik I
2
=
1
n
−1
χ2 -verteilte
σ.
n
X
i =1
Dann ist die empirische Varianz
Xi
−X
2
=
Zufallsvariable mit n
Math4Inf
n X
1
n
−1
−1
i =1
2
Xi
−X
2
Freiheitsgraden.
470 / 567
Denition 19.11 [t -Verteilung].
Seien X , Z zwei unabhängige Zufallsvariablen, wobei X
χ2 -verteilt
sei mit m Freiheitsgraden und Z sei standardnormalverteilt. Dann
heiÿt die Verteilung der Zufallsvariablen
T
=p
Z
X /m
t -Verteilung oder auch Student-Verteilung mit m Freiheitsgraden.
Es ist E (X )
=0
(m
> 1),
Var(X )
= m/(m − 2)
(m
> 2),
und die
Dichtefunktion ist gegeben durch
Γ((m + 1)/2)
w (x ) = √
m πΓ(m /2)
Statistik I
Math4Inf
1
+
x
2
m
−
m+
2
1
.
471 / 567
Satz 19.12.
Sei S die Standardabweichung und X das arithmetische Mittel einer
zufälligen Stichprobe X1 , . . . , Xn vom Umfang n eines
normalverteilten Merkmals X mit Erwartungswert
µ = E(X ).
Dann
besitzt die Zufallsvariable
T
=
−µ
√
S/ n
X
eine t -Verteilung Zufallsvariable mit n
Statistik I
Math4Inf
−1
Freiheitsgraden.
472 / 567
•
Punktschätzungen
Denition 19.13 [Erwartungstreu].
Sei T eine Schätzfunktion des Parameter
i) T heiÿt erwartungstreu, falls E (T )
Θ.
= Θ.
ii) T heiÿt konsistent, falls limn→∞ P (|T
beliebiges
− Θ| < ) = 1
für
> 0.
iii) T heiÿt konsistent im quadratischen Mittel, wenn
limn→∞ E ((T
− Θ)2 ) = 0.
Satz 19.14.
Ist eine Schätzfunktion konsistent im quadratischen Mittel, so ist
sie auch konsistent.
Statistik I
Math4Inf
473 / 567
Bemerkung 19.15.
X (arithmetisches Mittel) und P (empirischer Anteil) sind
erwartungstreu und konsistent im quadratischen Mittel. S
2
(empirische Varianz) ist erwartungstreu und konsistent.
Statistik I
Math4Inf
474 / 567
•
Intervallschätzungen
Denition 19.16 [Kondenzintervall].
Seien gu (X1 , . . . , Xn ) und go (X1 , . . . , XN ) Stichprobenfunktionen
mit gu (X1 , . . . , Xn )
P
≤ go (X1 , . . . , XN ),
und sei
α ∈ [0, 1].
Ist
(Θ ∈ [gu (X1 , . . . , Xn ), go (X1 , . . . , XN )]) = 1 − α,
dann heiÿt [gu (X1 , . . . , Xn ), go (X1 , . . . , XN )] Kondenzintervall
(Vertrauensintervall) zum (Kondenz)niveau (Vertrauensniveau,
Sicherheit) 1 − α. Der Wert
α
heiÿt auch Irrtumswahrscheinlichkeit.
α
Werte wie z.B. 0.1, 0.05, 0.01.
Bemerkung 19.17.
Üblicherweise wählt man für
Statistik I
Math4Inf
475 / 567
Satz 19.18 [Kondenzintervall für E (X ) eines normal
verteilten Merkmals X bei bekanntem σ].
i) Wähle eine Kondenzniveau 1 − α (z.B. 0.90, 0.95 oder 0.99).
ii) Ziehe eine Stichprobe vom Umfang n und berechne x
(arithmetisches Mittel der Stichprobe).
iii) Bestimme das 1 − α/2-Quantil z der
Standardnormalverteilung.
iv) Das Kondenzintervall zum Niveau 1 − α ist gegeben durch
x
Statistik I
σ
σ
− z√ ,x + z√
n
Math4Inf
n
.
476 / 567
Satz 19.19 [Kondenzintervall für σ eines normal
verteilten Merkmals X ].
2
i) Wähle eine Kondenzniveau 1 − α (z.B. 0.90, 0.95 oder 0.99).
ii) Ziehe eine Stichprobe vom Umfang n und berechne s 2
(Varianz der Stichprobe bzgl. x ).
iii) Bestimme das 1 − α/2 und
2
χ
-Verteilung mit n
−1
α/2-Quantil zu , zo
der
Freiheitsgraden.
iv) Das Kondenzintervall zum Niveau 1 − α ist gegeben durch
(n − 1)s 2 (n − 1)s 2
,
.
zu
zo
v) Das Kondenzintervall der Standardabweichung
1
−α
zum Niveau
ist gegeben durch
s
Statistik I
σ
(n − 1)s
zu
s
2
,
Math4Inf
2
(n − 1)s
.
zo
477 / 567
Satz 19.20 [Kondenzintervall für einen Anteilswert p
bei groÿem Stichprobenumfang n ≥ 20].
i) Wähle eine Kondenzniveau 1 − α (z.B. 0.90, 0.95 oder 0.99).
ii) Ziehe eine Stichprobe vom Umfang n und berechne den
empirischen Anteil p.
iii) Bestimme das 1 − α/2-Quantil z der
Standardnormalverteilung.
iv) Sei
g±
=
n
n
+ z2
p
z
+
r
2
2n
±
z
p (1
− p)
n
Dann ist das Kondenzintervall zum Niveau 1
durch [g− , g+ ]. Für np (1
durch
"
r
p
Statistik I
−z
p (1
− p) ≥ 9
− p)
n
4 n2
−α
!
.
ist gegeben
kann dies ersetzt werden
r
,p + z
Math4Inf
+
z2
p (1
− p)
n
#
.
478 / 567
•
Hypothesentest
Denition 19.21 [Hypothesen, Test].
i) Ein statistisches Testproblem besteht aus einer Nullhypothese
H0 und einer Alternativhypothese H1 , die sich gegenseitig
ausschlieÿen.
ii) Enthalten die Hypothesen Aussagen über einen Parameter
Θ,
so spricht man von einem parametrischen Test.
iii) Eine Hypothese heiÿt einfach, wenn sie nur aus einem
Parameterwert besteht, z.B.
zusammengesetzt, z.B.
Θ = 100.
Ansonsten heiÿt sie
Θ 6= 100.
iv) Der Test basiert auf einer Zufallsstichprobe und einer
Stichprobenfunktion T (X1 , . . . , Xn ), deren Verteilung unter
Annahme der Nullhypothese bekannt ist.
Statistik I
Math4Inf
479 / 567
v) Der Ablehnungsbereich (oder Verwerfungsbereich) umfasst
jene Werte von T (X1 , . . . , Xn ), die für die Alternative H1
sprechen und mit einer Wahrscheinlichkeit kleiner oder gleich
vi)
α
auftreten.
α
heiÿt Signikanzniveau des Tests. Typische Werte sind
0.1, 0.05, 0.01.
vii) Wenn T (X1 , . . . , Xn ) in den Ablehnungsbereich fällt, dann
lautest die Testentscheidung H0 zugunsten von H1
verwerfen, ansonsten H0 beibehalten.
Statistik I
Math4Inf
480 / 567
Beispiel 19.22.
i) Bei der Produktion von Schokoladentafeln möchten wir durch
Stichproben feststellen, ob das erwartete Gewicht
µ
einer
produzierten Tafel dem Sollwert von 100 Gramm entspricht.
ii) Unsere Nullhypothese H0 ist:
µ = 100. Unsere
: µ 6= 0. H0 ist einfach
Alternativhypothese lautet H1
und H1
ist zusammengesetzt.
iii) Wir ziehen nun eine Stichprobe von 10 Schokoladentafeln und
erhalten ein arithmetisches Mittel von 98.9 Gramm. Sollen wir
aufgrund der Stichprobe H0 zugunsten von H1 verwerfen
oder H0 beibehalten?
Statistik I
Math4Inf
481 / 567
iv) Dazu bestimmen wir, wie groÿ die Abweichung c von 100 sein
muss, damit es extrem unwahrscheinlich ist, dass das
Stichprobenmittel unter der Annahme der Gültigkeit von H0
zustande gekommen ist.
v) Extrem unwahrscheinlich wird mit dem Signikanzniveau
(hier
α = 0, 05)
α
gemessen, und c ergibt sich dann aus
P
X − µ > c = α.
vi) Wir nehmen an, dass hier X (Gewicht einer Schokolade)
normalverteilt ist mit Standardabweichung
normalverteilt mit Standardabweichung
P
Statistik I
X − µ > c = α ⇔ P
√
n
σ
Math4Inf
σ/
σ.
√
Somit ist X
n , und es ist
√
X
−µ ≤
n
σ
c
= 1−α/2.
482 / 567
√
n
vii) Nun ist σ
X
−µ
das entsprechende 1
viii) In dem Beispiel mit
c
standardnormalverteilt, und wir können
− α/2-Quantil
σ=2
aus einer Tabelle ablesen.
ergibt sich
σ
2
= 1.96 · √ = 1.96 · √
n
10
= 1.24.
ix) Wenn also ein Stichprobenmittel x mit
x
< µ − c = 98.8
oder x
> µ + c = 101.24
gezogen wird, dann verwerfen wir H0 zugunsten von H1 .
Ansonsten behalten wir H0 .
x) Hier ist x
Statistik I
= 98.9
und wir behalten H0 .
Math4Inf
483 / 567
Satz 19.23 [Test für E (X ) eines normalverteilten
Merkmals bei bekannten σ (Gauÿ-Test)].
i) Formuliere die Hypothesen (µ
a)
b)
c)
= E (X )):
H0 : µ = µ0 gegen H1 : µ 6= µ0
H0 : µ ≥ µ0 gegen H1 : µ < µ0
H0 : µ ≤ µ0 gegen H1 : µ > µ0
ii) Wähle das Signikanzniveau
α.
iii) Ziehe eine Stichprobe vom Umfang n, berechne x und den
standardisierten Prüfwert
√
z
=
n
σ
(x − µ) .
iv) Bzgl. der Standardnormalverteilung berechne die Quantile
z1−α/2 und z1−α .
Statistik I
Math4Inf
484 / 567
v) Entscheidung:
a)
b)
c)
H0 ist zu verwerfen, falls |z | > z1−α/2 .
H0 ist zu verwerfen, falls z < −z1−α .
H0 ist zu verwerfen, falls z > z1−α .
Bemerkung 19.24.
Der Gauÿ-Test entspricht dem Vorgehen beim Berechnen von
Kondenzintervallen 19.18. Analog können die Ergebnisse über
Kondenzintervalle in den Sätzen 19.18 und 19.19 in Form von
Hypothesentests formuliert werden.
Statistik I
Math4Inf
485 / 567
Teil IV
Mathematik IV
Math4Inf
486 / 567
Kurven und Flächen
Denition 20.1 [Kurven (siehe auch Denition 13.39)].
Eine Abbildung c
: [a, b] → Rn
der Form
t
c1 (t )
c2 (t )
7→ .
..
cn (t )
heiÿt parameterisierte Kurve. Die Funktionen ci
: [a, b] → R
heiÿen
die Komponentenfunktionen. Sind alle Komponentenfunktionen
Polynome, dann wird die Kurve als Polynomkurve bezeichnet.
Bemerkung 20.2.
R2 ist die
= {(x , y ) ∈ R : f (x , y ) = 0},
Eine andere Darstellungsform für eine Kurve c im
sogenannte implizite Darstellung c
wobei f
(x , y ),
: R2 → R
2
eine Abbildung ist. Ist dabei f ein Polynom in
dann heiÿt c eine algebraische Kurve.
Kurven und Flächen
Math4Inf
487 / 567
Beispiel 20.3.
Seien a, b
> 0.
Die Ellipse c mit Achsen auf den Koordinatenachsen
und den Achsen-Schnittpunkten
±(a, 0)| , ±(0, b)|
besitzt (etwa)
die Darstellungen
c
=
Kurven und Flächen
a cos t
b sin t
: t ∈ [0, 2π] = (x , y ) ∈ R2 :
Math4Inf
x
2
a2
+
y
2
b2
−1=0 .
488 / 567
Denition 20.4 [Tangentialvektor (siehe auch
Denition 13.41)].
Sei c
: [a, b] → Rn
eine Kurve mit dierenzierbaren
Komponentenfunktionen. Dann heiÿt
0
c1 (t )
c 0 (t )
2
ċ (t ) = .
..
0
cn (t )
Tangentialvektor (Geschwindigkeitsvektor) der Kurve in c (t ).
Bemerkung 20.5.
Sei c
: [a, b] → R2
eine Kurve mit dierenzierbaren
?
∈ [a, b]
−c20 (t ? )
0 ?
c1 (t )
Komponentenfunktionen, und es sei t
Vektor
nc (t
?
)=
1
kċ (t ? )k
mit ċ (t
heiÿt Normalen(einheits)vektor der Kurve in c (t
Kurven und Flächen
Math4Inf
?)
6= 0.
Der
? ).
489 / 567
Bemerkung 20.6.
i) Der Normalenvektor ist senkrecht zum Tangentialvektor, der
eine Tangentialgerade an die Kurve erzeugt.
nc (t )
ċ (t )
c (t )
= {(x , y ) ∈ R2 : f (x , y ) = 0} eine implizite Darstellung
2
einer Kurve, wobei f : R → R partiell dierenzierbar ist, und
?
?
es sei grad f (x , y ) 6= 0. Dann ist bis auf das Vorzeichen ? ?
der Normalen(einheits)vektor in (x , y ) gegeben durch
ii) Sei c
1
kgrad f (x ? , y ? )k
Kurven und Flächen
grad f (x
Math4Inf
?
, y ? ).
490 / 567
Denition 20.7 [Länge einer Kurve (siehe auch
Denition 13.41)].
Sei c
: [a, b] → Rn
eine Kurve mit stetig dierenzierbaren
Komponentenfunktionen. Dann heiÿt
v
Z bu
Z b
n
uX
0
2
t
kċ (t )k dt
L(c ) =
[ci (t )] dt =
a
a
i =1
Länge der Kurve c von a nach b. Die Funktion Lc
Lc (l )
Z l
=
a
: [a, b] → R
mit
kċ (t )k dt
heiÿt Längenfunktion der Kurve C .
Kurven und Flächen
Math4Inf
491 / 567
Denition 20.8 [Reparameterisierung].
: [a, b] → Rn eine Kurve, und sei [â, b̂] ⊂ R. Sei weiterhin
h : [â, b̂ ] → [a, b ] eine bijektive, dierenzierbare Funktion mit
0
0
h (t ) > 0 (bzw. h (t ) < 0) für alle t ∈ [a, b ].. Dann heiÿt die Kurve
n
d : [â, b̂ ] → R mit d (t ) = c (h (t )) eine Reparameterisierung von c .
Seien c
Ist c stetig dierenzierbar mit ċ (t )
6= 0
für alle t
∈ [a, b],
dann
heiÿt die Reparameterisierung
e
c : [0, L(c )] → [a, b ]
mit e
c (s )
=c
−1
Lc
(s )
−1
die nach der Kurvenlänge reparameterisierte Kurve. Hierbei ist Lc
die Umkehrabbildung der Längenfunktion.
Kurven und Flächen
Math4Inf
492 / 567
Satz 20.9.
: [a, b] → Rn eine stetig dierenzierbare Kurve mit ċ (t ) 6= 0
für alle t ∈ [a, b ]. Dann gilt für die nach der Kurvenlänge
n
reparameterisierte Kurve e
c : [0, L(c )] → R
Sei c
ke
c˙ (s )k = 1.
Insbesondere ist für Le
c (s )
Kurven und Flächen
=s
für alle s
Math4Inf
∈ [0, L(c )].
493 / 567
Denition 20.10 [Bernsteinpolynome ].
54
Für 0
≤i ≤m
bi ,m (t )
heiÿt das Polynom bi ,m
=
m
i
(1 − t )m−i t i =
:R→R
m!
(m − i )! i !
mit
(1 − t )m−i t i
i -tes Bernsteinpolynom vom Grad m.
Beispiel 20.11.
= (1 − t )m , b1,m = m (1 − t )m−1 t ,
m b
m −1 .
bm,m = t ,
m−1,m = m (1 − t )t
b0,m
54 Sergei Natanowitsch Bernstein, 18801968
Kurven und Flächen
Math4Inf
494 / 567
Satz 20.12 [Eigenschaften von Bernsteinpolynomen].
Für i
< m, i < 0
oder m
<0
setzen wir bi ,m (t )
= 0.
i) bi ,m (t )
ii)
iii)
≥ 0 für t ∈ [0, 1],
Pm
i =0 bi ,m (t ) = 1,
bi ,m (t ) = (1 − t ) · bi ,m−1 (t ) + t · bi −1,m−1 (t ),
iv) bi0,m (t )
v)
= m (bi −1,m−1 (t ) − bi ,m−1 (t )),
Pm
bi ,m (α t ) =
j =0 bi ,j (α) bj ,m (t ) für α ∈ R.
Kurven und Flächen
Math4Inf
498 / 567
Denition 20.13 [Bézierkurven ].
55
Seien c0 , . . . , cm
∈ Rn .
Die Bézierkurve B
: [0, 1] → R
von Grad m
bzgl. den Kontrollpunkten c0 , . . . , cm ist deniert durch
B (t )
=
m
X
i =0
bi ,m (t ) ci ,
wobei bi ,m (t ) die Bersteinpolynome sind.
Im Falle n
=2
heiÿt der Polygonzug c0 , c1 , . . . , cm auch
Kontrollpolygonzug.
55 Pierre Étienne Bézier, 1910 1999
Kurven und Flächen
Math4Inf
499 / 567
Beispiel 20.14.
•
Lineare Bézierkurve (Grad 1) mit zwei Kontrollpunkten c0 und
c1 ist die Strecke
B (t )
= (1 − t ) c0 + t c1 ,
Kontrollpunkte c0
Kurven und Flächen
t
∈ [0, 1].
= (−1, 1)| , c1 = (0, −1)|
Math4Inf
500 / 567
•
Quadratische Bézierkurve (Grad 2) mit drei Kontrollpunkten
c0 , c1 und c2 ist die Kurve
B (t )
= (1 − t )2 c0 + 2 (1 − t ) t c1 + t 2 c2 ,
Kontrollpunkte c0
Kurven und Flächen
t
∈ [0, 1].
= (−1, 1)| , c1 = (0, 0)| , c2 = (1, 1)|
Math4Inf
501 / 567
•
Kubische Bézierkurve (Grad 3) mit vier Kontrollpunkten c0 ,
c1 , c2 und c3 ist die Kurve
B (t )
= (1−t )3 c0 +3 (1−t )2 t c1 +3 (1−t ) t 2 c2 +t 3 c3 ,
Kontrollpunkte c0
Kurven und Flächen
t
∈ [0, 1].
= (−1, 1)| , c1 = (0, 0)| , c2 = (1, 1)| , c3 = (3, −1)|
Math4Inf
502 / 567
•
weitere Beispiele
Kurven und Flächen
Math4Inf
503 / 567
Satz 20.15.
Jede Polynomkurve c (t ), t
∈ [0, 1],
vom Grad m lässt sich als
Bézierkurve vom Grad m darstellen, d.h., sei
c (t )
=
m
X
i =0
ai t
i,
n
∈ Rn , dannP
gibt es Kontrollpunkte ci ∈ R ,
m
dass c (t ) =
i =0 bi ,m (t ) ci . Für die Kontrollpunkte
für geeignete ai
0
≤ i ≤ m,
so
ci gilt dabei
Kurven und Flächen
i
i
X
j
ci =
m aj .
j =0 j
Math4Inf
504 / 567
Satz 20.16 [Eigenschaften von Bézierkurven].
Sei B (t ) eine Bézierkurve vom Grad m. Dann gilt
i) B (0)
ii) Ḃ (0)
= c0 ,
= cm ,
B (1)
= m · (c1 − c0 ),
Ḃ (1)
( m
X
m
X
= m (cm − cm−1 ),
iii)
B (t )
∈
λi ci :
i =0
i =0
)
λ i = 1,
λi ≥ 0 ,
t
∈ [0, 1],
d.h. das Bild der Bézierkurve liegt in der konvexen Hülle der
Kontrollpunkte. Dies ist die kleinste konvexe Menge, die die
Kontrollpunkte enthält.
iv) Sei T
: Rn → Rn
eine ane Abbildung (siehe Denition 6.8).
Dann gilt
T (B (t ))
=
m
X
i =0
Kurven und Flächen
bi ,m (t ) T (ci ).
Math4Inf
505 / 567
Satz 20.17 [De Casteljau - Algorithmus].
56
Sei B (t ) eine Bézierkurve vom Grad m bzgl. den Kontrollpunkten
c0 , . . . , cm . Sei t
1
≤j ≤m
(j )
ci
sei
?
(0)
∈ [0, 1], ci
(j −1)
= (1 − t ? ) · ci
ci
Insbesondere ist B (t
?)
=
56 Paul de Casteljau, 1930 Kurven und Flächen
j
X
k =0
(m )
= c0
für 0
(j −1)
+ t ? · ci +1 ,
Dann gilt:
(j )
= ci
bk ,j (t
?
≤ i ≤ m,
für 0
und für
≤ i ≤ m − j.
) ci +k .
.
Math4Inf
506 / 567
Satz 20.18 [Unterteilung von Bézierkurven].
Sei B (t ) eine Bézierkurve vom Grad m bzgl. den Kontrollpunkten
∈ Rn . Sei α ∈ [0, 1] und sei Bl (t ) = B (t ) für
Br (t ) = B (t ) für t ∈ [α, 1]. Bl (t ) und Br (t ) sind
c0 , . . . , cm
und
t
∈ [0, α]
Polynomkurven vom Grad m und daher als Bézierkurven über dem
Intervall [0, 1] darstellbar.
(j )
Sind ci
die Punkte des de Casteljau Algorithmus von B (t ) für
?
= α, so ist Bl (t ) die Bézierkurve vom Grad m bzgl. den
(j )
Kontrollpunkten c0 , j = 0, . . . , m, und Br (t ) ist die Bézierkurve
(m − j )
vom Grad m bzgl. den Kontrollpunkten cj
, j = 0, . . . , m.
den Wert t
Kurven und Flächen
Math4Inf
507 / 567
Bemerkung 20.19.
Eine Anwendung von Bézierkurven ist das Rendering von Kurven,
um sie auszugeben (Drucker, Bildschirm, etc.). Da sich lineare
Kurven (Strecken) einfach ausgeben lassen und die Auösung des
Ausgabemediums nicht beliebig fein sein kann, wird zunächst
festgelegt, wann eine Bézierkurve B (t ) vom Grad m mit
Kontrollpunkten c0 , . . . , cm fast linear ist:
Dazu gebe man eine Toleranz
>0
vor und berechne den
maximalen Abstand eines Punktes ci , i
Geraden durch die beiden Endpunkte
= 0, . . . , m, von der
c0 und cm . Ist dieser Abstand
nicht gröÿer als die vorgegebene Toleranz, dann ist die Kurve fast
linear.
c3
c1
c4
c0
Kurven und Flächen
c2
Math4Inf
508 / 567
: [a, b] → R2 eine Polynomkurve vom Grad m. Zum
Plotten von c (t ) bietet sich folgendes rekursives Verfahren
Sei c (t )
an:
(0) Stelle c (t ) als Bézierkurve B (t ) vom Grad m über [0, 1] dar.
Ist B (t ) fast linear, gehe zu (3).
(1) Unterteile B (t ) in zwei Bézierkurven Bl (t ), Br (t ) bzgl. dem
Wert
α = 1/2.
(2)
I
I
Ist Bl (t ) fast linear gehe zu (3), sonst wende (1) auf Bl (t ) an.
Ist Br (t ) fast linear gehe zu (3), sonst wende (1) auf Br (t ) an.
(3) Man gebe die Strecke zwischen den Kontrollpunkten c0 und cm
aus.
Kurven und Flächen
Math4Inf
509 / 567
Denition 20.20 [(2-)Fläche].
Sei U
⊂ R2 .
: U → R3 der
x1 (s , t )
S (s , t ) = x2 (s , t )
x3 (s , t )
Eine Abbildung S
heiÿt 2-Fläche . Die Funktionen xi
:U→R
Form
heiÿen die
Komponentenfunktionen. Sind alle Komponentenfunktionen
Polynome, dann wird die Fläche als Polynomäche bezeichnet.
Bemerkung 20.21.
Eine andere (und üblichere) Darstellungsform für eine Fläche c im
R3 ist auch hier die implizite Darstellung
3
3
S = {(x1 , x2 , x3 ) ∈ R : f (x1 , x2 , x3 ) = 0}, wobei f : R → R eine
Abbildung ist. Ist dabei f ein Polynom in (x1 , x2 , x3 ), dann heiÿt S
eine algebraische Fäche.
Kurven und Flächen
Math4Inf
510 / 567
Beispiel 20.22.
Seien a, b , c
> 0.
Das Ellipsoid S mit Achsen auf den
Koordinatenachsen und den Achsen-Schnittpunkten
±(0, b, 0)| ,
S (s , t )
= {(a sin s cos t , b sin s sin t , c cos s )| : s ∈ [0, π], t ∈ [0, 2π]}
2
2
2
y
z
x
3
= (x , y , z ) ∈ R : 2 + 2 + 2 − 1 = 0 .
a
Kurven und Flächen
±(a, 0, 0)| ,
±(0, 0, c )| besitzt (etwa) die Darstellungen
b
c
Math4Inf
511 / 567
Zylinder: S (s , t )
= (cos(s ), sin(s ), t )| ,
Propeller: S (s , t )
Kurven und Flächen
= (s 2 t , s t 2 , s t )| ,
Math4Inf
s
s
∈ [0, 2π], t ∈ [−1, 1].
∈ [−1, 1], t ∈ [−1, 1].
512 / 567
Denition 20.23 [Tangentialebene].
⊂ R2 , eine Fläche. Für (s ? , t ? ) ∈ U betrachten
?
?
wir die beiden Kurven Ss ? (t ) = S (s , t ) und St ? (s ) = S (s , t ).
?
?
Sind die beiden Tangentialvektoren S˙s ? (t ) und S˙t ? (s ) linear
Sei S
: U → R3 ,
U
unabhängig, dann heiÿt
S (s
?
, t ? ) + lin {S˙s ? (t ? ), S˙t ? (s ? )}
Tangentialebene von S in S (s
nS (s
?
, t ?) =
? , t ? ). Der Vektor
S˙s ? (t
× S˙t ? (s ? )
kS˙s ? (t ? ) × S˙t ? (s ? )k
?)
Normalen(einheits)vektor der Fläche S in S (s
Kurven und Flächen
Math4Inf
? , t ? ).
513 / 567
Bemerkung 20.24.
= {(x1 , x2 , x3 ) ∈ R3 : f (x1 , x2 , x3 ) = 0} eine implizite
3
Darstellung einer Fläche, wobei f : R → R partiell dierenzierbar
?
?
?
ist, und es sei grad f (x1 , x2 , x3 ) 6= 0. Dann ist bis auf das
? ? ?
Vorzeichen der Normalen(einheits)vektor in (x1 , x2 , x3 ) gegeben
Sei S
durch
1
?
kgrad f (x1? , x2? , x3? )k
?
?
grad f (x1 , x2 , x3 ).
Denition 20.25 [Bézierächen].
Seien ci ,j , i
= 0, . . . , m, j = 0, . . . , p,
(Kontrollpunkte) im
R3 .
Dann heiÿt
S (s , t )
=
p
m X
X
i =0 j =0
Bézieräche. Die
bi ,m (s )bj ,p (t )ci ,j ,
(m + 1)(p + 1)
(s , t ) ∈ [0, 1] × [0, 1],
Kontrollpunkte bilden ein
Kontrollpunktpolytop.
Kurven und Flächen
Math4Inf
514 / 567
Beispiel 20.26.
= p = 1, und c0,0 = (0, 0, 0)| ,
= (0, 1, 0)| , c1,1 = (1, 1, 1)| .
Sei m
c1,0
c0,1
= (1, 0, 0)| ,
1
0.8
0.6
0.4
1
0.2
0.8
0
0
0.6
0.2
0.4
0.4
0.6
0.2
0.8
1
Kurven und Flächen
0
Math4Inf
515 / 567
Satz 20.27 [Eigenschaften von Bézierächen].
Sei S (s , t ) eine Bézieräche mit Kontrollpunkten ci ,j
i
= 0, . . . , m, j = 0, . . . , p.
i) S (s , t )
∈ R3 ,
Dann gilt:
∈ conv{c0,0 , . . . , cm,p }
für s , t
∈ [0, 1],
d.h. S (s , t ) ist
enthalten in dem Polytop, welches von den Kontrollpunkten
erzeugt wird.
= c0,0 , S (1, 0) = cm,0 , S (0, 1) = c0,p
S (1, 1) = cm,p .
ii) S (0, 0)
iii) Sei T
: R3 → R3
eine ane Transformation. Dann gilt
T (S (s , t ))
=
p
m X
X
i =0 j =0
Kurven und Flächen
und
bi ,m (s )bj ,p (t )T (ci ,j ).
Math4Inf
516 / 567
Numerische Mathematik
Satz 21.1.
Zu
(n + 1)
gibt es genau ein Polynom p
p (xi )
= yi ,
(xi , yi ), 0 ≤ i ≤ n, xi 6= xj , i =
6 j,
: R → R vom Grad ≤ n mit
beliebigen Stützstellen
≤ i ≤ n. p heiÿt Interpolationspolynom bzgl. den
(xi , yi ), 0 ≤ i ≤ n (siehe auch Bemerkung 11.31).
0
Stützstellen
Satz 21.2 [Langrange'sches Interpolationspolynom].
57
Das Interpolationspolynom in der Lagrangschen Form bzgl. den
Stützstellen
(xi , yi ),
0
≤ i ≤ n,
p (x )
=
n
X
i =0
ist gegeben durch
yi
57 Joseph-Louis Lagrange, 17361813
Numerische Mathematik
n
Y
j =0,j 6=i
− xj
.
xi − xj
x
Math4Inf
517 / 567
Satz 21.3 [Neville-Algorithmus].
Seien
(xi , yi ),
0
≤ i ≤ n,
Stützstellen, und sei pi ,j (x ) das
Interpolationspolynom vom Grad höchstens j bzgl. den Stützstellen
(xk , yk ),
= i − j , . . . , i , 0 ≤ j ≤ i ≤ n. Für x ∈ R gilt dann
yi ,
j = 0,
pi ,j (x ) =
(x −x − ) p , −1 (x )−(x −x ) p −1, −1 (x ) , 1 ≤ j ≤ i .
x −x −
k
i
j
i j
i
i
Numerische Mathematik
i
i
j
j
Math4Inf
518 / 567
Satz 21.4 [Newton'sches Interpolationspolynom].
58
Das Interpolationspolynom in der Newtonschen Form bzgl. den
Stützstellen
p (x )
(xi , yi ),
0
≤ i ≤ n,
ist gegeben durch
= a0 + a1 (x − x0 ) + a2 (x − x0 ) (x − x1 ) + · · ·
+ an (x − x0 ) (x − x1 ) · . . . · (x − xn−1 )
i −1
n
Y
X
(x − xj )
ai
=
i =0 j =0
für geeignete ai
∈ R.
Zur Bestimmung der ai , i
yi ,
αi ,j = α
, −1 −α −1, −1 ,
x −x −
i j
i
i
Dann gilt ai
i
j
j
= 0, . . . , n,
j
= 0,
1
≤ j ≤ i.
sei
= αi ,i , i = 0, . . . , n.
58 Isaac Newton, 1643-1727
Numerische Mathematik
Math4Inf
519 / 567
Satz 21.5 [Horner -Schema].
59
Sei f (x ) ein Polynom in der Form f (x )
=
Pn
i
i = 0 ai x .
Zum
?
Auswerten von f (x ) eignet sich die Beobachtung:
+ an − 2 ) x ? + · · · ) x ? + a0 .
Q i −1
Pn
Ist das Polynom in der Form f (x ) =
i =0 ai j =0 (x − xj ) dann:
?
?
?
?
f (x ) = . . . an x −xn−1 +an−1 x −xn−2 +· · ·+a1 x −x0 +a0 .
f (x
?
) = (. . . ((an x ? + an−1 )
59 William George Horner, 1786-1837
Numerische Mathematik
x
?
Math4Inf
520 / 567
Satz 21.6.
: [a, b] → R eine (n + 1)-mal stetig dierenzierbare Funktion
f , und seien xi ∈ [a, b ], 0 ≤ i ≤ n, n + 1 verschiedene Werte. Sei p
das Interpolationspolynom bzgl. den Stützstellen (xi , f (xi )). Dann
?
existiert für alle x ∈ [a, b ] ein ξ ∈ [a, b ] mit
Sei f
n
Y
f (x ) − p (x ) =
(x ? − xi ) .
(n + 1)!
i =0
?
Numerische Mathematik
?
f
(n+1) (ξ)
Math4Inf
521 / 567
Satz 21.7.
Sei
{x0 , . . . , xn }
die äquidistante Unterteilung des Intervalls [a, b ] in
n Teilintervalle, d.h.
xi
=a+i
b
−a
n
, i = 0, . . . , n .
Sei pn das Interpolationspolynom vom Höchstgrad n bzgl. den
Stützstellen
(xi , yi ),
Z b
a
0
≤ i ≤ n.
pn (x ) dx
mit
αi =
Numerische Mathematik
Dann gilt
=
b
−a
n
Z n Y
n
0
X
n
i =0
t
j =0, j 6=i
i
−j
−j
Math4Inf
αi yi ,
dt .
522 / 567
Denition 21.8.
Sei f
: [a, b] → R
eine integrierbare Funktion, sei
{x0 , . . . , xn }
die
äquidistante Unterteilung des Intervalls [a, b ] in n Teilintervalle. Die
Formel
b
−a
n
mit
αi =
X
n
i =0
Z n Y
n
0
αi f (xi )
t
j =0, j 6=i
i
−j
−j
dt ,
heiÿt Newton-Cotes Integrationsformel vom Grad n für
Satz 21.9.
Sei f
Rb
a f (x ) dx .
: [a, b] → R eine (n + 1)-mal stetig dierenzierbare Funktion,
= (b − a)/n. Dann gilt
Z
X
n
b
b−a
f (x ) dx −
αi f (xi ) = O(hn+2 ).
a
n
i =0
und sei h
Numerische Mathematik
Math4Inf
523 / 567
Bemerkung 21.10.
i) Man sagt, dass die Netwon-Cotes Integrationsformel ein
Verfahren der Ordnung n
+2
ist.
ii) Da die Güte der Netwon-Cotes Integrationsformel n-Grades
von der Intervalllänge h
= (b − a)/n
abhängt, unterteilt man
ein gegebenes Intervall zunächst in kleine Teilintervalle und
wendet dort jeweils die Netwon-Cotes Integrationsformel vom
Grad n an. Für n
=1
erhält man so die Trapezregel, für n
die Simpsonregel und bei n
=3
=2
die 3/8- Regel (siehe Satz
13.36 und Bemerkungen 13.37, 13.38).
iii) Für n
≥7
treten negative Gewichte
αi ,
so dass die Formeln
instabil werden.
Numerische Mathematik
Math4Inf
524 / 567
Beispiel 21.11.
= 1: Trapezregel; sei f : [a, b] → R, N > 0, h = (b − a)/N und
= a + i h, i = 0, . . . , N . Auf jedem Teilintervall [xi , xi +1 ] wenden
wir die Newton-Cotes Integrationsfomel mit n = 1 und erhalten
n
xi
dort den Näherungswert
Ii
=
h
2
(f (xi ) + f (xi +1 ))
Z x +1
i
für
x
f (x ) d x .
i
Insgesamt erhalten wir so als Näherungswert von
S (h )
=
NX
−1
h
i =0
Numerische Mathematik
2
Rb
a f (x ) dx
(f (xi ) + f (xi +1 )) .
Math4Inf
525 / 567
2
Man kann nun zeigen, dass S (h ) ein Polynom in h ist, mit
Rb
S (0) =
a f (x ) dx .
Die Idee ist nun S (h ) durch ein
Interpolationspolynom vom Grad r bzgl. Stützstellen
(hi2 , S (hi ))
zu
approximieren, und dann Näherungen für S (0) zu erhalten. Die
Wahl der Stützstellen führt dann zu verschiedenen
Integrationsverfahren.
Numerische Mathematik
Math4Inf
526 / 567
Denition 21.12 [Verträgliche/submultiplikative
Matrixnorm (siehe Def. 6.28)].
|·|
Rn × n .
Sei
i)
eine Norm auf dem Vektorraum der reellen n
|·|
heiÿt submultiplikativ, falls für alle A, B
×n
∈ Rn × n
Matrizen
gilt
|A B | ≤ |A| |B |.
ii) Sei
| · |∗
Rn . Dann heiÿt | · |
n×n und x ∈ Rn
A ∈ R
eine (Vektor-) Norm auf
verträglich mit
| · |∗
falls für alle
gilt:
|A x|∗ ≤ |A| |x|∗ .
Beispiel 21.13.
P
|A|1 = P ni,j =1 |ai ,j |
|x|1 = ni=1 |xi |.
Numerische Mathematik
ist submultiplikativ und verträglich mit
Math4Inf
527 / 567
Notation 21.14.
Im folgenden sei
k·k
die Matrixnorm
kAk =
max
x∈Rn \{0}
kA xk
.
kxk
Diese Norm ist submultiplikativ und verträglich mit der
kxk, x ∈ Rn . Desweiteren
p
kAk = λn (A| A),
Euklidischen (Vektor-) Norm
wobei
λn (A| A)
ist
|
der maximale Eigenwert von A A ist.
Denition 21.15 [Kondition].
Für A
∈ Rn × n ,
A regulär, heiÿt
cond(A)
= kAkkA−1 k
die Kondition der Matrix A.
Numerische Mathematik
Math4Inf
528 / 567
Bemerkung 21.16.
Sei U
= (ui ,j )1≤i ,j ≤n
eine obere Dreiecksmatrix. Dann lässt sich das
Gleichungssystem U x
= b,
b
∈ Rn ,
durch Rückwärtseinsetzen, d.h.
beginnend mit der letzten Koordinate xn , lösen (falls es überhaupt
lösbar ist).
Analog lässt sich ein Gleichungssystem L x
= b,
b
∈ Rn ,
wobei L
eine untere Dreiecksmatrix ist, durch Vorwärtseinsetzen, d.h.
beginnend mit der ersten Koordinate x1 , lösen (falls es überhaupt
lösbar ist).
Das Inverse einer oberen (unteren) Dreiecksmatrix ist wiederum
eine obere (untere) Dreiecksmatrix.
Numerische Mathematik
Math4Inf
529 / 567
Satz 21.17 [LU-Faktorisierung].
Sei A
∈ Rn × n .
Das folgende Verfahren (Gauss-Algorithmus)
bestimmt eine untere Dreiecksmatrix L mit Einsen auf der
Diagonalen, eine obere Dreiecksmatrix U und eine
Permutationsmatrix P (entsteht aus Einheitsmatrix durch
Spaltenvertauschungen), so dass A
i) Setze P0
= L0 = In
und U0
= P L U:
= A,
und k
= 1.
ii) Im k -ten Schritt werden durch Addition geeigneter
αk ,l -Vielfache der k -ten Zeile von Uk −1 zu den
l = k + 1, . . . , n-ten Zeilen von Uk −1 alle Einträge in der k -ten
Spalte von Uk −1 unterhalb der Diagonalen zu 0 gemacht., und
man erhält Uk . Die Einträge von Lk in der k -ten Spalte
unterhalb der Diagonalen sind −αk ,l . Ist zum Ausführen eine
Zeilenvertauschung k ↔ m, k < m, notwendig, dann werden
zunächst die entsprechenden Zeilen von Uk −1 , und die
entsprechenden Spalten von Pk −1 vertauscht. Bei Lk −1 werden
die ersten k − 1 Einträge der Zeilen k und m ausgetauscht.
Numerische Mathematik
Math4Inf
530 / 567
Bemerkung 21.18.
i) Aus Stabilitätsgründen wird oft das betragsmäÿig gröÿte
Elemente der k -ten Spalte von Uk −1 in die k -Zeile getauscht.
ii) Zum Bestimmen der LU-Faktorisierung benötigt man
O(n3 )
Operationen. Das Lösen eines Gleichungssystem der Form
P LU x
=b
kostet
O(n2 )
Operationen.
iii) Um bei Computerberechnungen Ungenauigkeiten
auszugleichen, kann man beim Lösen eines Gleichungssystems
A
x=b
wie folgt vorgehen: Die erhaltene (erste) Lösung
(0) =
führt zu einem (möglichen) Defekt d
(
0)
(
0)
einer Defektgleichung A y
= d . Setze
x(0)
b − A x(0) und zu
x(1) = x(0) + y(0)
usw. Diesen Prozess nennt man auch Nachiteration.
Numerische Mathematik
Math4Inf
531 / 567
Satz 21.19 [Cholesky -Zerlegung].
60
Zu jeder symmetrischen positiv deniten Matrix A
eine untere Dreiecksmatrix G
j
= (gi ,j )
mit A
∈ Rn × n
= G G |.
gibt es
Dabei gilt für
= 1, . . . , n:
gj , j
v
u
u
= ta
gi , j
=
1
gj , j
j ,j −
j −1
X
g
2
j ,k ,
k =1
!
j −1
X
ai , j −
gi , k gj , k
,
k =1
60 André-Louis Cholesky, 1875-1918
Numerische Mathematik
Math4Inf
i
= j + 1, . . . , n .
532 / 567
Satz 21.20 [QR-Faktorisierung].
Sei A
∈ Rm × n
≥n
mit m
= n. Seien a1 , . . . , an ∈ Rm
seien u1 , . . . , un die zugehörigen
und rg(A)
die Spaltenvektoren von A, und
Gram-Schmidt orthogonalisierten Vektoren (siehe Satz 6.42), d.h.
ui = ai −
Sei
qi = ui /kui k,
und sei R
ri ,j
∈ Rn × n
Q
∈ Rm × n
j =1
ku j k2
uj .
die Matrix mit Spalten
q1 , . . . , qn ,
die oberer Dreiecksmatrix mit
= hui , aj i/kui k,
1
≤ i ≤ j ≤ n.
A
Numerische Mathematik
i −1
X
huj , ai i
Dann gilt
= Q R.
Math4Inf
533 / 567
Bemerkung 21.21.
Sei A
∈ Rm × n
mit m
≥n
und rg(A)
= n.
Zum Bestimmen der
(möglichen) Lösung des überbestimmten Systems A
x=b
kann
man wie folgt vorgehen:
i) Man bestimme eine QR-Faktorisierung von A, also A
= Q R.
Dann gilt
x = b ⇒ Q R x = b ⇒ Q | Q R x = Q | b ⇒ R x = Q | b.
|
?
Man löse R x = Q b und überprüfe, ob die Lösung x auch
Lösung von A x = b ist.
A
ii)
Satz 21.22.
Sei A
A
∈ Rm × n
=QR
mit m
≥ n,
rg(A)
= n,
und sei b
∈ Rm .
eine Q R -Faktorisierung von A, und sei
Lösung von R
x = Q | b.
Dann ist
Ausgleichsproblems :
min
x ∈R
Numerische Mathematik
n
x?
x?
Sei
die eindeutige
die Lösung des linearen
kA x − bk.
Math4Inf
534 / 567
Bemerkung 21.23.
Sei A
∈ Rm × n
|
A
|
Q R eine Q R -Faktorisierung von A , und sei
R
=
= b.
|y
Numerische Mathematik
mit m
Dann ist Q
≤ n,
y
rg(A)
= m,
Lösung von A
und sei b
x = b.
Math4Inf
∈ Rm . Sei
y ∈ Rm
mit
535 / 567
Satz 21.24 [Jacobi -Verfahren].
61
Sei A
∈ Rn × n ,
und sei A
= L + D + U.
Hierbei sei D die
invertierbare Diagonalmatrix mit Elementen ai ,i , und L (U ) ist die
entsprechende untere (obere) Dreiecksmatrix mit Elementen aus A
und Nullen auf der Diagonalen. Das Jacobi-Verfahren ist das
folgende iterative Verfahren zum Lösen A
i) Sei x(0)
ii) x(k +1)
∈ Rn .
=
iii) Setze k
−1
D
Setze k
= 1.
b − (L + U ) x(k )
= k + 1. Gehe zu ii),
− x(k ) k/kx(k ) k)
(k +1)
auch kx
x = b:
.
solange
kA x(k ) − bk
(oder/und
nicht klein genug ist.
61 Carl Gustav Jacob Jacobi, 1804-1851
Numerische Mathematik
Math4Inf
536 / 567
Denition 21.25 [Strikt diagonaldominant].
Eine Matrix A
∈ Rn × n
heiÿt strikt diagonaldominant, falls für alle
Diagonalelemente gilt:
|ai ,i | >
n
X
j =1,j 6=i
|ai ,j |.
Satz 21.26.
Das Jacobi-Verfahren konvergiert für strikt diagonaldominant
Matrizen A gegen eine Lösung des Gleichungssystems A
Numerische Mathematik
Math4Inf
x = b.
537 / 567
Satz 21.27 [Gauss-Seidel Verfahren].
62
Sei A
∈ Rn × n ,
und sei A
= L + D + U.
Hierbei sei D die
invertierbare Diagonalmatrix mit Elementen ai ,i , und L (U ) ist die
entsprechende untere (obere) Dreiecksmatrix mit Elementen aus A
und Nullen auf der Diagonalen. Das Gauss-Seidel-Verfahren ist das
folgende iterative Verfahren zum Lösen A
i) Sei x(0)
ii) x(k +1)
∈ Rn .
= (D +
iii) Setze k
auch
Setze k
−1
L)
x = b:
= 1.
b − U x( k )
= k + 1. Gehe zu ii),
(
kx k +1) − x(k ) k/kx(k ) k)
.
solange
kA x(k ) − bk
(oder/und
nicht klein genug ist.
Satz 21.28.
Das Gauss-Seidel-Verfahren konvergiert für strikt diagonaldominant
Matrizen A gegen eine Lösung des Gleichungssystems A
62 Philipp Ludwig Ritter von Seidel, 1821-1896
Numerische Mathematik
Math4Inf
x = b.
538 / 567
Beispiel 21.29.
Sei
A
2
−1
11 − 1
−1
10
0
3
−1
10
−1
=
Die exakte Lösung ist
2
3
0
−1
b
=
6
25
.
−11
15
8
(1, 2, −1, 1)| .
Die folgende Tabelle gibt die
auf fünf Nachkommastellen gerundeten Ergebnisse des Jacobi- und
des Gauÿ-Seidel Verfahrens wieder:
k x1(k )
0 0
1 0.6
2 1.0473
3 0.93264
4 1.0152
5 0.98899
6 1.0032
Numerische Mathematik
Jacobi-Verfahren
x2(k )
x3(k )
0
0
2.2727 -1.1
1.7159 -0.80523
2.0533 -1.0493
1.9537 -0.96811
2.0114 -1.0103
1.9922 -0.99452
x4(k )
0
1.875
0.88523
1.1309
0.97384
1.0214
0.99443
Math4Inf
x1(k )
0
0.6
1.0302
1.0066
1.0009
1.0001
1
Gauÿ-Seidel-Verfahren
x2(k )
x3(k )
x
0
0
0
2.3273 -0.98727 0
2.0369 -1.0145
0
2.0036 -1.0025
0
2.0003 -1.0003
0
2
-1
0
2
-1 539 / 5671
Satz 21.30 [Konvergenz des Newtonverfahrens (siehe
Bemerkung 11.36)].
: [a, b] eine 2-mal stetig dierenzierbare Funktion, und seien
> 0 mit |f 0 (x )| ≥ m und |f 00 (x )| ≤ M für alle x ∈ [a, b]. Sei
?
?
x ∈ [a, b ] eine Nullstelle von f , d.h. f (x ) = 0, und sei
(
0)
x
∈ [a, b]. Für k ≥ 0 sei
Sei f
m, M
x
(k +1)
= x (k ) −
f (x
(k ) )
f 0 (x (k ) )
∈ [a, b].
Dann gilt
|x (k +1) − x ? | ≤
M
2m
|x (k ) − x ? |2 ,
d.h. unter diesen Voraussetzungen konvergiert das
Newton-Verfahren quadratisch gegen die Nullstelle.
Numerische Mathematik
Math4Inf
540 / 567
Satz 21.31 [Konvergenz des Sekantenverfahrens
(vergl. Bemerkung 11.35)].
: [a, b] eine 2-mal stetig dierenzierbare Funktion, und seien
0
00
m , M > 0 mit |f (x )| ≥ m und |f (x )| ≤ M für alle x ∈ [a, b ]. Sei
?
?
x ∈ [a, b ] eine Nullstelle von f , d.h. f (x ) = 0, und seien
(0) , x (1) ∈ [a, b ]. Für k ≥ 1 sei
x
Sei f
x
(k +1)
= x (k ) − f (x (k ) )
k − x k −1
∈ [a, b].
f (x (k ) ) − f (x k −1 )
x
Dann gilt
|x
wobei
(k +1)
τ = (1 +
√
?
−x |≤
5)/2
= 1.618
M
τ − 1
2m
|x (k ) − x ? |τ ,
der goldene Schnitt ist. Unter den
gegebenen Voraussetzungen konvergiert das Sekantenverfahren
superlinear gegen die Nullstelle.
Numerische Mathematik
Math4Inf
541 / 567
Beispiel 21.32.
Für x
>0
betrachten wir f (x )
= x + ln x .
Die folgende Tabelle
enthält die auf acht Nachkommastellen gerundeten Ergebnisse des
Newton- und Sekantenverfahrens:
Numerische Mathematik
k
Newton
Sekanten
0
0.5
0.5
1
0.56438239
0.6
2
0.56713899
0.5684139
3
0.56714329
0.56712028
4
0.56714331
5
0.56714329
Math4Inf
542 / 567
Gewöhnliche Dierentialgleichung
Denition 22.1 [Gewöhnliche Dierentialgleichung].
Eine Gleichung
F (x , y (x ), y
die eine reelle Funktion y
Ableitungen y
0
(x ), . . . , y (n) (x )) = 0,
: D → R,
D
⊆ R,
x
7→ y (x ),
mit ihren
0 , y 00 , . . . , y (n) bis zur n-ten Ordnung verknüpft, heiÿt
gewöhnliche Dierentialgleichung (DG) n-ter Ordnung in impliziter
Form. Hierbei ist F irgendeine stetige Funktion. Lässt sich diese
Gleichung nach der höchsten Ableitung auösen, also
y
(n )
(x ) = G (x , y (x ), y 0 (x ), . . . , y (n−1) (x ))
so spricht man von einer gewöhnlichen Dierentialgleichung n-ter
Ordnung in expliziter Form. Hängt G dabei nicht von x ab, so heiÿt
die Dierentialgleichung autonom.
Gewöhnliche Dierentialgleichung
Math4Inf
543 / 567
Bemerkung 22.2.
i) Die Lösung einer Dierentialgleichung ist eine mindestens
: D → R, die
= 0 für alle x ∈ D erfüllt.
0
(n) (x )) = 0 schreibt man
Statt F (x , y (x ), y (x ), . . . , y
0
(
n
) ) = 0.
abkürzend F (x , y , y , . . . , y
n-mal dierenzierbare Funktion y
F (x , y (x ), y
ii)
0 (x ), . . . , y (n) (x ))
iii) Sucht man nach Funktionen y (x1 , x2 , . . . , xn ) die gewisse
Gleichungen der partiellen Ableitungen
∂y
∂ xi ∂ xj erfüllen, so
spricht man von partiellen Dierentialgleichungen.
Zum Beispiel beschreibt die Wellengleichung
∂2y
(x , t ) −
∂x 2
∂2y
(x , t ) = 0
c 2 ∂t 2
1
die Ausbreitung von (etwa) Schallwellen. y (x , t ) ist dabei die
Auslenkung am Ort x zum Zeitpunkt t , und c ist die
Ausbreitungsgeschwindigkeit.
Gewöhnliche Dierentialgleichung
Math4Inf
544 / 567
Denition 22.3 [Anfangswertproblem].
Sind für die gesuchte Lösung y
:D→R
einer Dierentialgleichung
n-ter Ordnung zusätzliche n Forderungen der Form
y (a)
= y0 ,
y
0
(a) = y1 , . . . , y (n−1) (a) = yn−1
zu erfüllen, so heiÿt dies Anfangswertproblem. Hierbei ist a
(etwa der Anfang eines Intervalls D ) und yi
Gewöhnliche Dierentialgleichung
∈ R,
Math4Inf
0
∈D
≤ i ≤ n.
545 / 567
Satz 22.4 [Separation der Variablen].
Eine allgemeine Lösung einer trennbaren (separierbaren)
Dierentialgleichung der Form
y
wobei f
,g
0
= f (y ) g (x )
geeignete Funktionen sind, kann durch Auösen von
Z
dy
f (y )
Z
=
g (x ) dx
nach y erhalten werden. Sucht man eine spezielle Lösung für die
Anfangswertbedingung y (x0 )
= y0
dann erhält man dies durch
Spezialisierung der allgemeinen Lösungen, oder durch Auösen von
Z y (x )
y0
dz
f (z )
Z x
=
x0
g (s ) ds
nach y . Man bezeichnet diesen Ansatz auch als Trennung der
Variablen. Ist f (y0 )
Gewöhnliche Dierentialgleichung
= 0,
dann ist y (x )
= y0
Math4Inf
(auch) eine Lösung.
546 / 567
Satz 22.5 [Picard -Lindelöf ].
63
64
Sei F eine stetig dierenzierbare Funktion. Dann hat das
Anfangswertproblem
y
(n )
= F (x , y 0 , . . . , y (n−1) )
mit den n Anfangsbedingungen
y (a)
= y0 ,
y
0
(a) = y1 , . . . , y (n−1) (a) = yn−1
für jede Wahl der Anfangswerte y0 , . . . , yn−1 eine eindeutige
Lösung, die in einem oenen Intervall um a deniert ist, d.h. die
lokale Existenz und Eindeutigkeit ist gesichert.
63 Charles Émile Picard, 1856-1941
64 Ernst Leonard Lindelöf, 1870-1946
Gewöhnliche Dierentialgleichung
Math4Inf
547 / 567
Satz 22.6.
Gegeben sei die autonome Dierentialgleichung erster Ordnung
y
0
= f (y )
mit der Anfangsbedingung y (x0 )
= y0 .
Sie ist in einem oenen
Intervall um x0 eindeutig lösbar, und es gilt
i) Ist f (y0 )
= 0,
so ist die konstante Funktion y (x )
Lösung für alle x
ii) Ist f (y0 )
< 0,
> 0,
−∞
falls sie nicht existiert.
so konvergiert y (x ) (auf dem Intervall) gegen die
erste Nullstelle rechts von y0 bzw.
Gewöhnliche Dierentialgleichung
die
so konvergiert y (x ) (auf dem Intervall) gegen die
erste Nullstelle links von y0 bzw.
iii) Ist f (y0 )
= y0
∈ R.
∞
falls sie nicht existiert.
Math4Inf
548 / 567
Denition 22.7 [Gleichgewichtslagen].
Gegeben sei die autonome Dierentialgleichung erster Ordnung
y
0
= f (y ).
Die Nullstellen der Funktion f (t ) heiÿen Gleichgewichtslagen oder
Fixpunkte der Dierentialgleichung. Ein Fixpunkt y0 heiÿt
asymptotisch stabil, falls es ein oenes Intervall um y0 gibt, so dass
alle Lösungen, die hier starten, gegen y0 konvergieren.
Beispiel 22.8.
Für die logistische Wachstumsgleichung
y
0
= µ (1 − y (x )) y (x ) − h
∈ (0, µ/4), ist die linke Nullstelle
− hp
/µ nicht asymptotisch stabil, und die
= 1/2 + 1/4 − h/µ ist asymptotisch stabil.
mit Erntemenge h, h
y1
= 1 /2 −
p
Nullstelle y2
1/4
Gewöhnliche Dierentialgleichung
Math4Inf
rechte
549 / 567
Satz 22.9.
Eine Gleichgewichtslage y0 ist asymptotisch stabil, falls f
0
Ist f (y0 )
> 0,
0 (y
0
) < 0.
dann ist y0 nicht asymptotisch stabil.
Gewöhnliche Dierentialgleichung
Math4Inf
550 / 567
Denition 22.10 [Lineare Dierentialgleichung].
Eine Dierentialgleichung der Form
y
(n )
(x ) = an−1 (x ) y (n−1) (x ) + an−2 (x ) y (n−2) (x ) + · · · + a1 (x ) y 0(x )
+ a0 (x ) y (x ) + b(x )
heiÿt lineare Dierentialgleichung n-ter Ordnung. b (x ) heiÿt auch
Störfunktion. Ist b (x )
=0
für alle x , so nennt man die
Dierentialgleichung homogen, ansonsten inhomogen. Hängen die
Koezienten ai (x ), 0
≤i ≤n−1
und b (x ) nicht von x ab (sind
also Konstanten), dann spricht von einer linearer
Dierentialgleichung mit konstanten Koezienten.
Bemerkung 22.11.
Eine lineare Dierentialgleichung ist genau dann autonom, wenn sie
konstante Koezienten besitzt.
Gewöhnliche Dierentialgleichung
Math4Inf
551 / 567
Satz 22.12.
Sei I
ai , b
a
∈I
⊂ R ein abgeschlossenes Intervall, und seien die Funktionen
: I → R stetig, 0 ≤ i ≤ n − 1. Dann hat für jede Wahl von
und Anfangsbedingungen
y (a)
= y0 ,
y
0
(a) = y1 , . . . , y (n−1) (a) = yn−1 ,
die lineare Dierentialgleichung
y
(n )
(x ) = an−1 (x ) y (n−1) (x ) + · · · + a0 (x ) y (x ) + b(x )
eine eindeutige Lösung y
: I → R,
d.h. die globale Existenz und
Eindeutigkeit ist gesichert.
Gewöhnliche Dierentialgleichung
Math4Inf
552 / 567
Satz 22.13.
Die Lösungen einer homogenen linearen Dierentialgleichungen
y
(n )
(x ) = an−1 (x ) y (n−1) (x ) + · · · + a0 (x ) y (x )
(hlDG)
bilden einen n-dimensionalen Vektorraum. Insbesondere gilt für zwei
Lösungen y1 , y2 von hlDG und
α, β ∈ R
der DG, dass
α y1 + β y2
auch eine Lösung von hlDG ist.
Gewöhnliche Dierentialgleichung
Math4Inf
553 / 567
Denition 22.14 [Wronski -Determinante].
65
Seien y1 , . . . , yn hinreichend oft dierenzierbare Funktionen. Die
Determinante
W (x )
= det
y1
y2
0
y2
0
y1
.
.
.
(n−1)
y1
···
···
.
.
.
(n−1)
y2
···
yn
.
.
.
0
yn
(n−1)
yn
heiÿt Wronski-Determinante.
Satz 22.15.
Seien yi
: I → R,
Funktionen. Gibt
≤ i ≤ n, hinreichend oft dierenzierbare
es ein x0 ∈ I mit W (x0 ) 6= 0, dann sind die
1
Funktionen linear unabhängig.
65 Josef Hoené-Wro«ski , 1776-1853
Gewöhnliche Dierentialgleichung
Math4Inf
554 / 567
Satz 22.16 [vgl. Satz 4.26].
Gegeben sei die inhomogene lineare Dierentialgleichung
y
(n )
(x ) = an−1 (x ) y (n−1) (x ) + · · · + a0 (x ) y (x ) + b(x ),
(ilDG)
und es sei yp eine feste (partikuläre) Lösung von ilDG. Dann ist ȳ
eine weitere Lösung von ilDG genau dann, wenn yp
− ȳ
eine Lösung
der zugehörigen homogenen Dierentialgleichung
y
(n )
(x ) = an−1 (x ) y (n−1) (x ) + · · · + a0 (x ) y (x )
(zhlDG)
ist. Insbesondere sind alle Lösungen von ilDG gegeben durch
{yp + yh : yh
Gewöhnliche Dierentialgleichung
Lösung von zhlDG } .
Math4Inf
555 / 567
Satz 22.17.
Die lineare homogene Dierentialgleichung 1.ter Ordnung
y
0
(x ) = a0 (x ) y (x )
hat die allgemeine Lösung
y (x )
= c e a0 ( x ) d x .
R
Beispiel 22.18.
Für y
0
= −2 x y
erhält man
y
Gewöhnliche Dierentialgleichung
R
=ce
−2 x d x
= c e−x .
2
Math4Inf
556 / 567
Bemerkung 22.19 [Variation der Konstanten].
Gegeben sei die inhomogene lineare Dierentialgleichung 1.ter
Ordnung
y
0
(x ) = a0 (x ) y (x ) + b(x ).
Zum Bestimmen einer partikulären Lösung yp verwendet man die
Methode der Variation der Konstanten, d.h., man macht den Ansatz
yp (x )
= c (x ) yh (x ),
wobei yh eine Lösung der zugehörigen homogenen DG ist, d.h. man
variiert die Konstante c (x ). Einsetzen in die DG führt zu
c 0(x ) yh (x )
= b(x )
und so
Z
c (x )
Gewöhnliche Dierentialgleichung
=
bzw. c 0(x )
−
b (x ) e
R
=
b (x )
yh (x )
,
a0 ( x ) d x d x .
Math4Inf
557 / 567
Satz 22.20.
Die allgemeine Lösung der inhomogenen linearen
Dierentialgleichung 1.ter Ordnung
y
0
(x ) = a0 (x ) y (x ) + b(x )
ist gegeben durch
y
Z
a
(x )d x
0
=ce
+
Z
R
= e a0 ( x ) d x c +
R
Gewöhnliche Dierentialgleichung
−
R
a0 ( x ) d x d x
−
R
a0 ( x ) d x d x ,
b (x ) e
b (x ) e
Math4Inf
R
e
a0 ( x ) d x
c
∈ R.
558 / 567
Satz 22.21.
Seien y1 , y2 zwei lineare unabhängige Lösung einer homogenen
linearen Dierentialgleichung 2.ter Ordnung
y
00
(x ) = a1 (x ) y 0 (x ) + a0 (x ) y (x ).
(hlDG2)
Dann gilt für ihre Wronski-Determinante
W (x )
= y1 y20 − y10 y2 = c e a1 (x ) d x ,
R
wobei c eine Konstante ist.
Bemerkung 22.22.
Kennt man eine (von Null verschiedene) Lösung der DG hlDG2, so
kann man die obige Beziehung ausnutzen um eine zweite, dazu
linear unabhängige Lösung zu bestimmen.
Gewöhnliche Dierentialgleichung
Math4Inf
559 / 567
Bemerkung 22.23.
Gegeben sei die inhomogene lineare Dierentialgleichung 2.ter
Ordnung
y
00
(x ) = a1 (x ) y 0 (x ) + a0 (x ) y (x ) + b(x ),
(ilDG2)
und seien y1 , y2 zwei linear unabhängige Lösungen der zugehörigen
homogenen linearen DG. Zum Bestimmen einer partikulären Lösung
yp von ilDG2 verwendet man wieder den Ansatz der Variation der
Konstanten yp (x )
liefert zusammen
= c1 (x ) y1 (x ) + c2 (x ) y2 (x ). Einsetzen in ilDG2
0
0
mit der Bedingung c1 y1 + c2 y2 = 0 das System
0
c1 y1
0
0
c1 y1
+ c20 y2 = 0
+ c20 y20 = b(x ).
Die Koezientendeterminante dieses Systems ist gleich der
Wronski-Determinante, also ungleich Null, d.h. das
Gleichungssystem ist eindeutig lösbar.
Gewöhnliche Dierentialgleichung
Math4Inf
560 / 567
Satz 22.24.
Gegeben sei die inhomogene lineare Dierentialgleichung 2.ter
Ordnung
y
00
(x ) = a1 (x ) y 0 (x ) + a0 (x ) y (x ) + b(x ),
(ilDG2)
und seien y1 , y2 zwei linear unabhängige Lösungen der zugehörigen
homogenen linearen DG. Dann ist
yp (x )
Z
=−
y2 (x ) b (x )
W (x )
dx
Z
y1 (x )
+
y1 (x ) b (x )
W (x )
dx
y2 (x )
eine partikuläre Lösung.
Gewöhnliche Dierentialgleichung
Math4Inf
561 / 567
Denition 22.25 [Charakteristisches Polynom].
Für eine lineare homogene Dierentialgleichung n-ter Ordnung mit
konstanten Koezienten
y
(n )
(x ) = an−1 y (n−1) (x ) + an−2 y (n−2) (x ) + · · · + ao y (x )
heiÿt das Polynom
τ (λ) = λn − an−1 λn−1 − an−2 λn−2 − · · · − ao
charakteristisches Polynom der Dierentialgleichung.
Gewöhnliche Dierentialgleichung
Math4Inf
562 / 567
Satz 22.26 [Lineare homogene Dierentialgleichung
mit konstanten Koezienten].
Gegeben sei eine lineare homogene Dierentialgleichung n-ter
Ordnung mit konstanten Koezienten
y
(n )
(x ) = an−1 y (n−1) (x ) + an−2 y (n−2) (x ) + · · · + ao y (x ).
(lDGk)
i) Man bestimme alle verschiedenen Nullstellen des
charakteristisches Polynoms
τ (λ)
von lDGk einschlieÿlich der
algebraischen Vielfachheit, d.h. wie oft sie als Nullstelle
auftreten.
ii) Zu jeder k -fachen Nullstelle
αx
e
α
sind
, x eα x , . . . , x k −1 eα x
linear unabhängige Lösungen von lDGk.
Gewöhnliche Dierentialgleichung
Math4Inf
563 / 567
I
Ist α = β + γ i komplex, dann ersetze man für α und α die
Lösungsmenge durch
e
βx
cos γ x , x eβ x cos γ x , . . . , x k −1 eβ x cos γ x ,
e
βx
sin γ x , x eβ x sin γ x , . . . , x k −1 eβ x sin γ x .
Die durch dieses Vorgehen bestimmten Lösungen sind n linear
unabhängige Lösungen von lDGk.
Gewöhnliche Dierentialgleichung
Math4Inf
564 / 567
Satz 22.27.
Gegeben sei eine lineare inhomogene Dierentialgleichung n-ter
Ordnung mit konstanten Koezienten
y
(n )
(x ) = an−1 y (n−1) (x ) + an−2 y (n−2) (x ) + · · · + ao y (x ) + b(x ),
(liDGk)
und sei
τ (λ)
das charakteristische Polynom der zugehörigen
homogenen Dierentialgleichung.
i) Sei b (x )
= pm (x ) eα x
für ein Polynom pm (x ) vom Grad m und
α ∈ R.
I Ist τ (α) 6= 0, dann setzte
m
X
yp (x ) =
!
bi x
i
e
αx
.
i =0
I
Ist τ (α) = 0 mit algebraischer Vielfachheit k, dann setzte
yp (x ) = x
k
m
X
!
bi x
i
e
αx
.
i =0
Gewöhnliche Dierentialgleichung
Math4Inf
565 / 567
= pm (x ) eβ x cos γ x oder b(x ) = pm (x ) eβ x
für ein Polynom pm (x ) vom Grad m und β, γ ∈ R.
I Ist τ (β + i γ) 6= 0, dann setzte
ii) Sei b (x )
m
X
yp (x ) =
sin
γx
!
bi x i
e
βx
(µ1 cos γ x + µ2 sin γ x ) .
i =0
I
Ist τ (β + i γ) = 0 mit algebraischer Vielfachheit k, dann setzte
yp (x ) = x
k
m
X
!
bi x
i
e
βx
(µ1 cos γ x + µ2 sin γ x ) .
i =0
Die unbekannten Koezienten bi , µi können durch Einsetzen von
yp in liDGk und durch Koezientenvergleich bestimmt werden. Die
so bestimmten yp sind partikuläre Lösungen von liDGk
Gewöhnliche Dierentialgleichung
Math4Inf
566 / 567
Satz 22.28.
1
2
Sind yp und yp Lösungen der linearen Dierentialgleichungen
y
(n )
(x ) =
n −1
X
i =0
1
dann ist yp
ai (x ) y
+ yp2
y
(n )
(i )
(x )+b1 (x )
(x ) =
n −1
X
i =0
ai (x ) y
(i )
(x )+b2 (x ),
Lösung der Dierentialgleichung
(x ) =
n −1
X
i =0
Gewöhnliche Dierentialgleichung
und y
(n )
ai (x ) y
(i )
(x ) + b1 (x ) + b2 (x ).
Math4Inf
567 / 567