3.2. Lineare Verzerrungen
Werbung

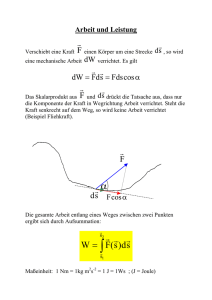
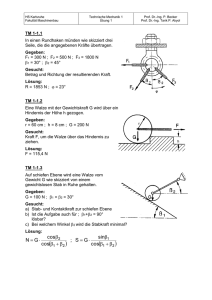
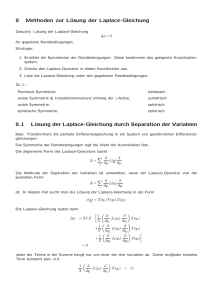
ZHW, NTM, 2006/10, Rur 3-1 Kapitel 3: Verzerrungen bei der Signalübertragung Inhaltsverzeichnis 3.1. EINLEITUNG .................................................................................................................. 2 3.2. LINEARE VERZERRUNGEN ......................................................................................... 3 3.3. GRUPPENLAUFZEIT ..................................................................................................... 4 3.4. AUSSTEUERUNGSKENNLINIE, ENTSTEHUNG VON OBERWELLEN ........................ 5 3.5. INTERMODULATIONEN UND DEREN ENTSTEHUNG ................................................. 7 Literatur- bzw. Quellenverzeichnis [1] Prof. Dr. U. Gysel, „Signale der Nachrichtentechnik“, ZHW-Skript, 2003. ZHW, NTM, 2006/10, Rur 3-2 3.1. Einleitung In Nachrichtensystemen werden Signale über Leitungen übertragen, in Filtern von Signalanteilen bei unerwünschten Frequenzen getrennt und in Verstärkern verstärkt, um nur einige wenige typische Operationen zu nennen. Dabei können die Signalformen entscheidend verändert werden. In der Regel möchte man die Signale aber unverzerrt oder formgetreu übertragen. Im ersten Teil dieses Kapitels betrachten wir die Verzerrungen, die bei der Übertragung von Signalen über lineare Systeme wie Filter, Leitungen, Mehrwegkanäle entstehen können. Lineare Systeme können im Zeitbereich mit der Stossantwort h(t) oder im Frequenzbereich mit dem Frequenzgang H(f) vollständig charakterisiert werden, siehe Abbildung 3-1. Für lineare Systeme gilt das Superpositionsgesetz. h(t) H(f) Zeitbereich: x(t) Frequenzbereich: X(f) y(t) = x(t)*h(t) Y(f) = X(f)∙H(f) Abbildung 3-1: Input-Output-Verhalten eines linearen Systems (* steht für Faltung). Wenn ein lineares System mit einem Sinus- oder Cosinus-Signal der Frequenz f0 angeregt wird, ist das Ausgangssignal auch wieder ein Sinus- oder Cosinus-Signal mit der gleichen Frequenz f0, wobei die Amplitude mit dem Betrag IH(f0)I multipliziert und die Phase um arg[H(f0)] verschoben wird. Die Phasenverschiebung entspricht einer zeitlichen Verzögerung. Neben den linearen Verzerrungen treten in Nachrichtensystemen auch nichtlineare Verzerrungen auf. Diese entstehen in Elementen mit nichtlinearen Kennlinien. Das Überlagerungsprinzip gilt hier nicht mehr. Das besondere Merkmal der nichtlinearen Verzerrungen sind neu auftretende Frequenzkomponenten, die im ursprünglichen Signal nicht vorhanden sind. Beispiel In Abbildung 3-2 ist die Übertragung eines Sinus-Signals über ein nichtlineares System dargestellt, das nur das Vorzeichen weiter gibt (signum-Funktion). Als Ausgangssignal resultiert ein periodisches, symmetrisches Rechtecksignal, das neben der Grundfrequenz f0 neu auch Oberwellen bei allen ungeraden Vielfachen von f0, z.B. bei f = 3f0, enthält. y = sgn(x) x(t) = sin(2πf0t) y(t) 1 -1 Abbildung 3-2: Bei der Übertragung über nichtlineare Systeme entstehen neue Frequenzen. t ■ Nichtlineare Kennlinien treten z.B. bei aktiven Schaltungen (z.B. Verstärkern) oder Induktivitäten und Transformatoren auf (infolge der nichtlinearen Magnetisierungskennlinie von ferromagnetischen Materialien). Teilweise werden sie aber auch bewusst eingesetzt wie z.B. bei Mischern, Modulatoren und Begrenzern. Zu den bekannten Phänomenen, welche auf Nichtlinearitäten zurückzuführen sind, gehört z.B. die Sättigung von Verstärkern. ZHW, NTM, 2006/10, Rur 3-3 3.2. Lineare Verzerrungen Bei der verzerrungsfreien (formgetreuen) Signalübertragung über ein lineares System sind nur zwei Veränderungen erlaubt. Das Ausgangssignal darf mit dem Faktor k verstärkt oder abgeschwächt werden, und es darf gegenüber dem Eingangssignal zeitlich um t0 verzögert sein, d.h. y(t) = k·x(t-t0) , (3.1) siehe auch Abbildung 3-3. ! y(t) = x(t)*h(t) = k·x(t-t0) lineares System h(t) x(t) ○ ● ○ Fouriertransformation ● Zeitverschiebungseigenschaft ! Y(f) = X(f)·H(f) = k·e-j2πfto ·X(f) X(f) H(f) H(f) Abbildung 3-3: Verzerrungsfreie Übertragung über ein lineares System. Mit der Zeitverschiebungseigenschaft der Fouriertransformation folgt aus Gleichung (3.1), dass ein lineares System dann verzerrungsfrei ist, wenn es innerhalb dem zu übertragenden Frequenzbereich einen konstanten Amplitudengang und einen linearen Phasengang aufweist, d.h. verzerrungsfreies, lineares System: H(f) k e -j2π f t 0 (3-2) siehe auch Abbildung 3-4. H(f) k -fg fg f φ(f) f Abbildung 3-4: Frequenzgang eines linearen, im Bereich IfI<fg verzerrungsfreien Systems. Erfüllt ein Übertragungssystem die Bedingungen für verzerrungsfreie Übertragung nicht, so heisst das noch nicht, dass das Signal unwiederbringlich verzerrt ist. Lineare Verzerrungen können zum Glück wieder korrigiert werden, z.B. durch Kaskadierung eines linearen Korrektur-Systems (z.B. eines Allpasses oder Laufzeitentzerrers). ZHW, NTM, 2006/10, Rur 3-4 3.3. Gruppenlaufzeit Ein lineares System verschiebt bei der Übertragung einer einzelnen Harmonischen der Frequenz f0 die Phase um φ(f0)=arg[H(f0)]. Die Phasenverschiebung entspricht einer Zeitverschiebung um τp(f0), d.h. cos(2πf0·t) → IH(f0)I·cos(2πf0·t+φ(f0)) = IH(f0)I·cos(2πf0·[t-τp(f0)]) . Die Zeitverzögerung τp(f) nennt man Phasenlaufzeit. Sie ist definiert durch τ p (f) (f) 2π f . (3.3) Die meisten Signale bestehen aber aus mehreren Harmonischen. In diesem Fall interessiert uns die Verzögerung der Enveloppe bzw. die Gruppenlaufzeit, die wie folgt definiert ist τ g (f) 1 d (f) . 2π df (3.4) Nur für verzerrungsfreie Übertragungssysteme, in denen φ(f) proportional zu f ist, stimmen Phasenlaufzeit τp(f) und Gruppenlaufzeit τg(f) überein. Man nennt Systeme, bei denen die beiden Laufzeiten τp(f) und τg(f) nicht identisch sind, dispersiv. Dispersive Systeme verzögern die verschiedenen Frequenzanteile im Eingangssignal unterschiedlich lange. Beispiel In Abbildung 3-5 ist die dispersive Übertragung eines amplitudenmodulierten Signals dargestellt. Die Enveloppe wird mit der Gruppenlaufzeit τg verzögert, während die Trägerschwingung nur mit der Phasenlaufzeit τp verzögert wird. τg τp Abbildung 3-5: Dispersive Übertragung eines amplitudenmodulierten Signals. ■ ZHW, NTM, 2006/10, Rur 3-5 3.4. Aussteuerungskennlinie, Entstehung von Oberwellen Nichtlinearitäten führen bei sinusförmigen Signalen zu einem weiterhin periodischen, aber nicht mehr sinusförmigen Ausgangssignal. Dieses kann nach Fourier in seine Harmonischen zerlegt werden. Als globales Mass für die Verzerrungen eines Sinussignals haben wir den Klirrfaktor kennen gelernt. Will man genaueres über die Harmonischen des verzerrten Sinussignals aussagen, so muss man zu einer detaillierten Analyse der nichtlinearen Schaltung übergehen. Die Charakteristik des verzerrenden Systems bzw. Elements wird zweckmässigerweise mit dessen Kennlinie beschrieben. Die Kennlinie gibt zu jedem Eingangswert den zugehörigen Ausgangswert in einem gewissen Bereich an. Abbildung 3-6 zeigt zum Beispiel eine Diodenkennlinie. Abbildung 3-6: Aussteuerung einer Diode mit einer sinusförmigen Spannung mit DC-Anteil. In dieser Figur ist zusätzlich dargestellt, wie eine sinusförmige Eingangsspannung zu einem nichtsinusförmigen Strom führt. Die Mischspannung am Eingang besteht aus einem Gleichspannungsanteil von 0.9 V und einem sinusförmigen Wechselanteil von 0.1 V. Die Kennlinie wird also sinusförmig im Bereich 0.8 ... 1.0 V ausgesteuert. Der durch die Diode fliessende Strom schwankt im Bereich 5 ... 225 mA; er hat aber bei weitem keine Sinusform mehr, d.h. er besitzt Oberwellen und einen merklichen Klirrfaktor. Manchmal kennt man von der nichtlinearen Kennlinie aufgrund theoretischer Überlegungen eine mathematische Beschreibung. In vielen Fällen liegen aber nur grafische oder tabellarische Werte aus Messungen vor. Die analytische Behandlung nichtlinearer Systeme und nichtlinearer Signalverformung setzt aber voraus, dass die Kennlinie als geschlossener mathematischer Ausdruck, gültig für den relevanten Aussteuerbereich, vorliegt. Diese mathematische Beschreibung erfolgt als Approximation durch eine Reihe geeigneter, einfacher Funktionen. Bewährt haben sich hierzu Potenzfunktionen, d.h. die Kennlinie wird approximativ im interessierenden Bereich durch ein Polynom dargestellt. Wir bezeichnen im ZHW, NTM, 2006/10, Rur 3-6 Folgenden die Eingangsgrösse mit x und die (nichtlinear verzerrte) Ausgangsgrösse mit y. Dabei können x und y Spannungen oder Ströme sein. Die approximierte Kennlinie lautet: y(x) b0 b1 x b2 x2 b 3 x3 ...... b n xn (3-5) Je höher der Grad n des Polynoms ist, umso besser ist die Approximation im entsprechenden Bereich, vorausgesetzt, die Koeffizienten bi werden richtig gewählt. Wie die Koeffizienten gewählt werden, soll hier nicht besprochen werden. Je nach Ausgangspunkt, d.h. ob eine analytische Beschreibung möglich ist wie bei einer Diode, oder ob nur Messwerte vorliegen, gibt es dafür verschiedene Verfahren. Diese sollten aus der Mathematik bekannt sein. Gibt man an den Eingang x eines nichtlinearen Systems, dessen Kennlinie durch ein Polynom gemäss Gleichung (3-5) beschrieben wird, eine sinusförmige Schwingung der Amplitude a und der Kreisfrequenz , x(t) = a cos t so entsteht ein Ausgangssignal y(t), das aus den mit den Polynomkoeffizienten bi gewichteten Potenzen von x(t) gemäss Gleichung (3-7) besteht (siehe Kasten weiter unten). Die Potenzen von x(t) lassen sich trigonometrisch umformen: 1 cos(2t) 1 2 1 3 cos (t) cos(3t) 3 cos(t) 4 1 cos 4 (t) cos(4t) 4 cos(2t) 3 8 : 2 cos (t) Die i-te Potenz i cos (t) (3-6) 1 i 1 cos(it) i cos([i 2]t) ..... 2 erzeugt also eine Komponente mit der i-fachen Eingangsfrequenz, daneben noch mindestens eine weitere Komponente innerhalb des Frequenzrasters von (i-2), (i-4).... Ordnet man die Summanden nach den Frequenzen, erhält man ein Ausgangssignal gemäss Gleichung (3-8), das aus Gleichanteil B0, Grundwelle mit der Amplitude B1 und Oberwellen mit den Amplituden Bi (Spitzenwerte) besteht. Eine Nichtlinearität n-ter Ordnung erzeugt höchstens Harmonische n-ter Ordnung. (3-7) (3-8) ZHW, NTM, 2006/10, Rur 3-7 Die Amplituden B0, B1, B2, . . . der Harmonischen sind von den Polynomkoeffizenten der Kennlinie abhängig. Ist die Kennlinie durch eine gerade Funktion beschreibbar, so kommen nur Komponenten mit den Frequenzen 0, 2, 4, . . . vor, da das Kennlinienpolynom nur Koeffizienten gerader Ordnungen aufweist. Entsprechend kommen bei einer Kennlinie mit ungerader Funktion (Punktsymmetrie, z.B. Begrenzer) nur Komponenten mit , 3, 5, . . . vor, da das Kennlinienpolynom nur Koeffizienten ungerader Ordnung enthält. Die Koeffizienten B0, B1, B2, . . . bestimmen das Spektrum des Ausgangssignals eindeutig. Experimentell könnte es mit einem Spektrumanalysator gemessen werden. Aus diesen Koeffizienten könnte auch der Klirrfaktor berechnet werden. 3.5. Intermodulationen und deren Entstehung An den Eingang x eines nichtlinearen Systems mit einer Kennlinie gemäss Gleichung (3.5) wird nun die Summe (Überlagerung) von zwei sinusförmigen Schwingungen (zwei "Töne") mit den Kreisfrequenzen und und den Amplituden a1 und a2 gegeben: x(t) = a1 cos(1t) + a2 cos(t). (3.9) Am Ausgang entsteht damit folgendes Signal: y(t) b 0 b1 a1 cos(1t) a 2 cos( 2 t) b2 a1 cos(1t) a 2 cos(2 t) 2 b3 a1 cos(1t) a 2 cos( 2t)3 ...... b0 b1 a 1 cos(1t) a 2 cos( 2 t) (3.10) b3 a13 cos3 (1t) a 23 cos3 ( 2 t) 3a 12 a 2 cos2 (1t) cos(2 t) ... b2 a12 cos2 ( 1t) a 22 cos2 ( 2 t) 2b2a1a 2 cos(1t) cos( 2t) Mit den Umformungen gemäss Gleichung (3.6) und der zusätzlichen trigonometrischen Beziehung cos cos 1 cos( ) cos( ) 2 (3.11) entsteht das folgende Ausgangssignal: y(t) b b 0 2 (a12 a 2 2 ) .... 2 3 3 b1a1 b3 (a13 2a1a 22 ) cos(1t) b1a 2 b3 (a 23 2a12 a 2 )cos( 2 t) .... 4 4 b 2 a 12 cos(21t) a 2 2 cos(2 2 t) b2a1a 2 cos( 1 2 )t cos(1 2 )t ...... 2 (3.12) a13 cos(31t) a 2 3 cos(3 2 t) b 3 3a 12a 2 [cos(2 1 2 )t cos(2 1 2 )t] .... 4 3a 1a 22 [cos(2 2 1 )t cos(2 2 1 )t] ZHW, NTM, 2006/10, Rur 3-8 Das Ausgangssignal nach obiger Gleichung enthält einen Gleichanteil und Terme bei Harmonischen der Einzelkreisfrequenzen, nämlich bei 1, 2, 21, 22, 31, 32, ...., genau wie zuvor bei einem einzelnen sinusförmigen Eingangssignal. Zusätzlich treten nun aufgrund der Doppelprodukte bei den Potenzen neue Terme mit den Kombinationskreisfrequenzen der Form ±i1± k2 auf. Man nennt die neu entstehenden Frequenzen auch Misch- oder Intermodulationsprodukte. Die Summe von m = |i|+|k| nennt man die Ordnung des Mischprodukts oder der Intermodulation. Eine Nichtlinearität n. Ordnung erzeugt höchstens Mischprodukte n. Ordnung. Tabelle 1 zeigt die Mischprodukte, die bei einer Nichtlinearität 5. Ordnung bei zwei Eingangsfrequenzen entstehen. So gehören zu den Intermodulationsprodukten 3. Ordnung die Kreisfrequenzen 31, 32, 21± 2 und 22 ± 1. Da in der physikalischen Wirklichkeit negative Frequenzen nicht vorkommen, sind die Kreisfrequenzen i1± k2 identisch mit den Kreisfrequenzen ±i1+ k2. k 0 i=0 0 2 3 4 5 2 22 32 42 52 Tabelle 3-1 i=1 1 1±2 1±22 1±32 1±42 i=2 21 21±2 21±22 21±32 i=3 31 31±2 31±22 i=4 41 41±2 i=5 51 Misch- oder Intermodulationsprodukte von zwei sinusförmigen Signalen an einer nichtlinearen Kennlinie 5-ter Ordnung. (Alle Produkte gleicher Schattierung in der Diagonalen haben dieselbe Ordnung m, welche übereinstimmt mit den Kolonnen- oder Zeilenbezeichnungen der Produkte am Rand der Diagonale.) In Mischern und Modulatoren will man bewusst neue Frequenzen erzeugen. Dort sind ein neues Produkt oder einige wenige neu entstehende Produkte erwünscht. In all jenen Fällen, in denen das System linear arbeiten soll, sind die Mischprodukte, welche aufgrund unvermeidlicher Nichtlinearitäten entstehen, unerwünscht. Nur dann nennt man sie Intermodulationen. Obwohl diese in der Regel sehr klein sind - sie nehmen mit zunehmender Ordnung rasch ab - stören sie bei Systemen, welche eine grosse Dynamik aufweisen müssen. Dies ist vor allem bei Funkempfängern, welche schwache Signale im Umfeld starker Nachbarkanäle empfangen müssen, und in der Messtechnik der Fall. In Abbildung 3.7 sind die Mischprodukte für zwei relativ nahe beieinanderliegende Eingangsfrequenzen f1 und f2 (Abstand ∆f) auf einer Frequenzachse eingezeichnet. Interessant an diesem Fall sind die beiden Intermodulationsprodukte 3. Ordnung, welche im Abstand von ∆f unterhalb f1 bzw. oberhalb f2 liegen. Solche Produkte sind in Empfängern häufig äusserst störend, da sie mit Filtern nicht beseitigt werden können. Sie müssen daher mit andern Mitteln reduziert werden. ZHW, NTM, 2006/10, Rur Δf 3-9 Δf Abbildung 3-7 Spektrallinien der Misch- oder Intermodulationsprodukte 1. bis 3. Ordnung bei zwei Eingangssignalen mit den nahe beieinander liegenden Frequenzen f1 und f2. Die Grösse der Mischprodukte hängt zuerst einmal von den Koeffizienten bi der nichtlinearen Kennlinie ab. Weiter hängt sie von den Amplituden der beiden Eingangssignale a1 und a2 ab. Mischprodukte n. Ordnung sind proportional zu a1i ·a2k mit i + k = n. Je höher die Ordnung, umso schneller steigen die Mischprodukte mit zunehmender Amplitude der Eingangssignale an. Trägt man Intermodulationsprodukte eines nichtlinearen Systems unterschiedlicher Ordnung in einer doppelt logarithmischen Darstellung in Funktion der Eingangsleistungen auf, so erhält man die Darstellung von Abbildung 3-8. Dabei wird immer Pein1 = Pein2 angenommen. Abbildung 3-8 Verstärkungskennlinie (Paus - Pein) eines sättigenden (nichtlinearen) Zweitors und Intermodulationsprodukte 2. und 3. Ordnung bei zwei gleich starken Eingangssignalen. Die mit Grundwellen angeschriebene Kurve entspricht der Verstärkung (oder Dämpfung) der Eingangssignale (Produkte 1. Ordnung in der Reihenentwicklung). Die Ausgangsleistung ergibt in der doppelt logarithmischen Darstellung über weite Bereiche eine Gerade mit der Steigung 20 dB/20 dB. Für zu grosse Eingangsleistungen erreicht die Ausgangsleistung einen Grenzwert, die sog. Sättigungsleistung. Sie wird bestimmt durch die maximale Aussteuerung der aktiven und ev. passiven Bauteile, z.B. bei Transistoren durch die Speisespannung und den max. Kollektorstrom bei minimaler Kollektorspannung. ZHW, NTM, 2006/10, Rur 3-10 Trägt man die Ausgangsleistung einiger Intermodulationsprodukte 2. und 3. Ordnung (IM2 und IM3) ebenfalls in dieses Diagramm ein, so erhält man für nicht zu grosse Eingangsleistungen ebenfalls Geraden. Im Unterschied zu den Grundwellen folgt die Geradenapproximation für IM2 einer Geraden mit der Steigung 40 dB/20 dB. Die IM3 steigen über weite Strecken sogar mit 60 dB/20 dB an. Diese steileren Anstiege haben mit den Potenzen zu tun, mit denen die Amplituden der beiden Eingangssignale in den Termen dieser Intermodulationsprodukte auftreten (z.B sind die IM2-Produkte proportional zu a12, a22 und a1a2). Aus dieser Darstellung kann man für bestimmte Eingangs- oder Ausgangsleistungen den Abstand der Intermodulationsprodukte ablesen. So ist in Abbildung 3-8 der IM3-Abstand eingetragen. Als Benützer eines Zweitors mit Sättigungseigenschaften ist man sehr häufig auf die Angabe der IM-Kennlinien angewiesen. Die Hersteller solcher Zwei- oder Mehrtore liefern diese Angaben auf eine elegante Art. Verlängert man sowohl die Verstärkungsgerade als auch die Gerade der IM2- und IM3-Produkte, so schneiden sich diese in je einem Punkt, der üblicherweise über der Sättigungsleistung liegt. Man nennt diese Punkte Interzeptpunkt für Intermodulationsprodukte 2. bzw. 3. Ordnung, oder kurz Interzeptpunkt IM2 bzw. IM3. Die Angabe in einem Datenblatt eines Verstärkers lautet z.B. Sättigungsleistung +13 dBm, Interzeptpunkt IM3 am Ausgang +23 dBm. Bei der Angabe der Interzeptpunkte muss man also noch angeben, ob man den Punkt am Ausgang- oder Eingang des Verstärkers definiert. Üblich ist die Definition über die Ausgangsleistung. Da für viele Verstärker die IM3 störend sind, wird häufig nur der Interzeptpunkt IM3 angegeben. Kennt man diesen, so kann man das Diagramm von Abbildung 3-8 aufzeichnen und für gegebene Signaleingangsleistungen die IM3-Pegel bestimmen. Als Beispiel nehmen wir einen Verstärker mit den Werten: Verstärkung 30 dB, Sättigungsleistung Psat = 20 dBm und Interzeptpunkt IM3 = 30 dBm am Ausgang. Gesucht ist die max. Eingangsleistung zweier gleich starker Eingangssignale, sodass die IM3-Produkte am Ausgang des Verstärkers im Minimum 60 dB schwächer sind als die gewünschten Ausgangssignale. Eine einfache geometrische Konstruktion, wie sie in Abbildung 3-9 dargestellt ist, ergibt eine max. Eingangsleistung von -30 dBm. Abbildung 3-9 Beispiel zur Bestimmung der max. Eingangsleistung bei einem gegebenen Verstärker und gefordertem IM3-Abstand