Schließen mit unscharfem Wissen - Technische Universität Chemnitz
Werbung

Schließen mit unscharfem Wissen
Vorlesung an der Technischen Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 2
Inhalt
1.
Einleitung ..................................................................................................................... 3
2.
Motivation: Einfaches Modell eines Fuzzy-Reglers .................................................... 4
2.1.
2.2.
3.
Diskrete Regelung .................................................................................................................................. 4
Fuzzy-Regelung ...................................................................................................................................... 4
Unscharfe Mengen........................................................................................................ 6
3.1.
3.2.
3.3.
3.4.
4.
Grundlegende Definitionen..................................................................................................................... 6
Repräsentationsformen für unscharfe Mengen........................................................................................ 8
Eigenschaften unscharfer Mengen .......................................................................................................... 9
Operationen auf unscharfen Mengen .................................................................................................... 11
Unscharfe Relationen ................................................................................................. 15
4.1.
4.3.
5.
Grundlegende Definitionen................................................................................................................... 15
Das Erweiterungsprinzip....................................................................................................................... 17
Approximatives Schließen ......................................................................................... 17
5.1.
5.2.
5.3.
5.4.
5.5.
6.
Linguistische Variable .......................................................................................................................... 17
Unscharfe Aussagen ............................................................................................................................. 19
Unscharfe Implikationen....................................................................................................................... 19
Inferenzen ............................................................................................................................................. 21
Regelmengen ........................................................................................................................................ 24
Entwurf eines Fuzzy-Reglers...................................................................................... 26
6.1.
6.2.
6.3.
6.4.
6.5.
Architektur eines Fuzzy-Reglers ........................................................................................................... 26
Die Regelbasis ...................................................................................................................................... 28
Die Datenbasis ...................................................................................................................................... 32
Die Inferenzmaschine ........................................................................................................................... 35
Defuzzifizierung ................................................................................................................................... 36
Literatur
C.v. Altrock: Fuzzy Logic (Band 1): Technologie. Oldenbourg-Verlag, München, 1993
C.v. Altrock, H.-J. Zimmermann: Fuzzy Logic (Band 2): Anwendungen. Oldenbourg-Verlag,
München, 1994
C.v. Altrock: Fuzzy Logic (Band 3): Werkzeuge. Oldenbourg-Verlag, München, 1995
D. Driankov, H. Hellendoorn, M. Reinfrank: An introduction to fuzzy control. Springer-Verlag,
Berlin, 1993.
J. Kahlert, H. Frank: Fuzzy-Logik und Fuzzy-Control. Vieweg-Verlag, Wiesbaden, 1994
R. Kruse, J. Gebhardt, F. Klawonn: Fuzzy-Systeme. B.G. Teubner, Stuttgart, 1993.
R. Strietzel, Fuzzy-Regelung, Oldenbourg-Verlag, München, 1996
D. H. Traeger: Einfuehrung in die Fuzzy-Logik2. B.G. Teubner, Stuttgart, 1994
H.-J. Zimmermann: Fuzzy set theory and its applications. Kluwer Acad. Publ., Boston, 1991.
J.F. Baldwin, Fuzzy logic. Wiley &Sons Publ., 1996
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 3
1. Einleitung
Die Theorie unscharfer Mengen und die unscharfe Logik sind durch das Bedürfnis motiviert, natürlichsprachliche Äußerungen, die von Natur aus vage sind, zu repräsentieren und im Computer verarbeitbar zu machen. Die einfachsten natürlichsprachlichen Äußerungen sind von der Form:
a ist ein X oder a hat die Eigenschaft P
Mit solchen Aussagen wird die Zugehörigkeit von Entitäten zu Mengen beschrieben, also eine Klassifikation vorgenommen. Sie stellen vielfach die Grundlage zusammengesetzter Äußerungen dar.
Aussagen dieser Art lassen sich durch die klassische Mengenlehre oder die Prädikatenlogik formal
repräsentieren. In der klassischen Mengenlehre wird immer eine eindeutige Aussage getroffen: entweder a gehört zu X oder es gehört nicht zu X, etwas Drittes gibt es nicht. Natürlichsprachliche
Aussagen sind meistens nicht in diesem Sinne eindeutig.
Sei U eine Grundmenge von Entitäten, genannt Diskurs-Universum. Eine unscharfe Menge F ist
eine Teilmenge von U, für deren Elemente jeweils angegeben wird, bis zu welchem Grad sie zu F
gehören. Diese Angabe beruht auf einer Schätzung. Die Schätzung hat drei charakteristische Eigenschaften:
1. Der Zugehörigkeitsgrad zu einer unscharfen Menge ist kein absoluter Wert, sondern wird einem
Element von einem Individuum oder einer Gruppe von Individuen subjektiv zugeordnet. Er
drückt eher eine Reihenfolge unter den Elementen bezüglich ihrer Zugehörigkeit zu der Menge
aus, ist also insofern eine relative Angabe.
2. Der Zugehörigkeitsgrad zu einer unscharfen Menge ist kontext- oder umgebungsabhängig. Zum
Beispiel wird man einen Biber nicht zu den großen Säugetieren rechnen, aber zu den großen
Nagetieren, d.h. die Präzisierung des Begriffs groß als unscharfe Menge hängt vom Kontext ab.
3. Eine unscharfe Menge unterscheidet sich dadurch von einer unpräzise beschriebenen Menge,
dass letztere wegen Fehlens genauer Information nicht besser beschrieben werden kann. Zum
Beispiel kann es sein, dass man nicht genau weiß, wie hoch die Temperatur in einem Körper ist,
dass man aber sagen kann, dass sie innerhalb bestimmter Schranken liegt. In diesem Fall gibt
man das Intervall zwischen den beiden Schranken als unpräzisen Wert an.
Unscharfe Logik und Wahrscheinlichkeit
In der Wahrscheinlichkeitstheorie werden Ereignisse mit Wahrscheinlichkeiten belegt. Diese ergeben sich aus Berechnungen, z.B. die Wahrscheinlichkeit, dass eine bestimmte Zahl beim Würfeln
erscheint, oder aus Statistiken, manchmal auch aus Schätzungen. Im letzten Fall sind dies aber nicht
subjektive Einschätzungen, sondern Schätzungen, die aufgrund von Erfahrungen gemacht werden.
In der unscharfen Logik können Ereignisse mit Möglichkeitswerten belegt werden. Diese beruhen
auf subjektiven Einschätzungen uns sind i.a. nicht identisch mit den Wahrscheinlichkeitswerten der
Ereignisse. Es kann auch die Wahrscheinlichkeit vager Ereignisse berechnet werden, etwa die
Wahrscheinlichkeit, dass beim Würfeln eine große Zahl erscheint. Betrachtet man die Zahlen des
Würfels in unterschiedlichem Grad als groß, und zwar (1, 0), (2, 0), (3, 0.2), (4, 0.5), (5, 0.7), (6, 1),
dann wäre die Wahrscheinlichkeit, dass eine große Zahl erscheint folgendermaßen zu berechnen:
6
P( u )
i
i 1
Technische Universität Chemnitz
groß
1
( ui ) (1 0. 7 0.5 0. 2) 0. 4
6
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 4
Ohne Berücksichtigung des vagen Begriffs groß wäre die Wahrscheinlichkeit, dass eine der vier
Zahlen 3, ..., 6 erscheint 0.66.
2. Motivation: Einfaches Modell eines Fuzzy-Reglers
2.1. Diskrete Regelung
Bei der Regelung geht es generell darum, aus den Werten eines oder mehrerer Kontrollparameter
die erforderliche Veränderung einer Stellgröße zu berechnen. Genauer gesagt geht es um die Abweichung des Kontrollparameters (oder mehrerer Kontrollparameter) von einem vorgegebenen Sollwert
(gegebenen Sollwerten).
Nimmt man den Fall nur eines Kontrollparameters (z.B. beim Temperaturregler), dann berechnet
ein konventioneller Regler (PI-Regler) den Einstellwert aufgrund der Gleichung
u K P e K I edt
t
Durch Differenzierung erhält man aus dieser Gleichung die folgende
.
.
uK P e K I e
Die Zeit ist hier als Kontinuum betrachtet. Diskretisiert man sie, dann erhält man (mit k als Zeitpunkt)
u( k) KP e( k) KI e( k)
Hierbei ist u(k) die Stellgröße und u(k) die berechnete Veränderung der Stellgröße, d.h. es gilt
u(k) = u(k) u(k1)
e(k) ist der Fehler und es gilt
e(k) = ysw y(k)
wobei ysw der Sollwert und y(k) die tatsächliche Ausgabe des Systems ist.
e(k) ist die Änderung des Fehlers und es gilt
e(k) = e(k) e(k1)
2.2. Fuzzy-Regelung
Ein Fuzzy-Regler benutzt keine analytischen Ausdrücke zur Regelung, sondern eine Wissensbasis,
die aus Fuzzy-Regeln besteht. Diese Regeln haben allgemein die Form
wenn Prozesszustand dann Stellwert
Das heißt, aufgrund eines bestimmten Prozesszustandes wird eine Veränderung des Stellwertes
bestimmt. Die Regel stellt also eine Art kausaler Beziehung zwischen beidem her, die in dem analytischen Ausdruck des PI-Reglers nicht vorliegt. Der wesentliche Unterschied liegt aber in der Art
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 5
der für die Variablen verwendeten Werte. Sie sind für die drei Variablen e(k), e(k) und u(k) in
der folgenden Tabelle aufgeführt.
e(k)
e(k)
negativ groß (NG) negativ groß (NG)
negativ klein (NK) klein (K)
null (N)
positiv groß (PG)
positiv klein (PK)
positiv groß (PG)
u(k)
negativ groß (NG)
negativ klein (NK)
null (N)
positiv klein (PK)
positiv groß (PG)
drastische Änderung (DÄ)
Es gibt zwei Gruppen von Regeln: die aktiven Regeln, die bei jedem Kontrollzyklus ausgewertet
werden, und die Kritischer-Bereich-Regeln, die nur aktiviert werden, wenn die Prozessausgabe in
den kritischen Bereich oder in seine Nähe gerät. Werden die Kritischer-Bereich-Regeln aktiviert,
dann wird die von ihnen ermittelte Stellwertänderung mit der von den aktiven Regeln ermittelten
verrechnet. Eine Regel der ersten Gruppe hat z.B. folgende Form:
wenn
und
dann
der Wert von e(k) PG ist
der Wert von e(k) NG ist,
ist der Wert von u(k) PK.
Der Prozesszustand wird also durch den Zusammenhang zwischen den Variablen e(k) und e(k)
definiert. Die aktiven Regeln setzen die verschiedenen Verhältnisse zwischen ihnen und den Werten
von u(k) in Beziehung zueinander. Deshalb kann man die Regeln durch folgende Tabelle wiedergeben:
e(k)
NG
NK
N
PK
PG
NG
NG
NK
N
PK
e(k)
K
NG
NK
N
PK
PG
PG
NK
N
PK
PG
Es gibt drei Kritischer-Bereich-Regeln:
Regel 1:
wenn der Wert von e(k) im kritischen Bereich liegt
dann ist der Wert von u(k) DÄ.
Regel 2:
wenn der Wert von e(k) in den kritischen Bereich eintritt
dann addiere den von Regel 1 bestimmten Wert von u(k) zum aktuellen
Wert von u(k).
Regel 3:
wenn der Wert von e(k) den kritischen Bereich verlässt
dann subtrahiere den von Regel 1 bestimmten Wert von u(k) vom
aktuellen Wert von u(k).
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 6
3. Unscharfe Mengen
Definition 3.1 (Charakteristische Funktion)
Sei U ein Grundbereich und A U. A: U {0, 1} ist eine charakteristische Funktion der Menge A wenn für alle x X gilt:
1
0
A ( x)
falls x A
falls x A
Die mengentheoretischen Operationen Vereinigung, Durchschnitt und Komplement können mittels
der charakteristischen Funktion beschrieben werden:
A ( x) 1 A ( x)
A B ( x ) min ( A ( x ), B ( x ))
A B ( x ) max ( A ( x ), B ( x ))
3.1. Grundlegende Definitionen
Definition 3.2 (Zugehörigkeitsfunktion)
Sei U eine Grundmenge. Die Zugehörigkeitsfunktion ist die Funktion
: U [0, 1]
Der Graph von wird als unscharfe Menge F über U aufgefasst:
F = {(u, (u)) | u U}
F(U) bezeichnet die Menge aller unscharfen Mengen über U.
Eine alternative, von Zadeh vorgeschlagene Darstellungsform für unscharfe Mengen basiert auf
folgendem Prinzip: Sei S = {u1, u2, ..., un} eine scharfe Menge. Sie lässt sich auch auf folgende
Weise notieren:
S = u1 + u2 + ... + un
wobei das Symbol + eine Aufzählung bezeichnet. Weiterhin wird das Paar (u, (u)) als (u)/u
geschrieben. Die Menge F = {(u, F(u)) | u U} lässt sich damit wie folgt darstellen:
F = F(u1)/u1 + ... + F(un)/un =
n
F
( ui ) / ui
i 1
Die Aufzählungsoperation + hat die Eigenschaft F(u)/u + G(u)/u = max(F(u), G(u))/u, d.h.wenn
dasselbe Element mit verschiedenen Graden zu zwei verschiedenen Mengen gehört, wird der größere Wert genommen.
Jedes abzählbare oder diskrete Universum U erlaubt die Summendarstellung für unscharfe Mengen
F=
F
( u) / u
u U
Für überabzählbare oder kontinuierliche Universen kann man diese Schreibweise noch etwas verallgemeinern:
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 7
F = F (u ) / u
U
Definition 3.3 (L-Menge)
Sei U eine Grundmenge und (L, , ) ein Verband mit dem kleiinsten Element lmin und dem
größten Element lmax. Eine L-Menge über U ist eine Funktion von U in die Menge L, d.h.
: U L
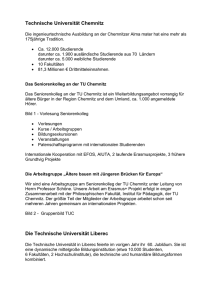
Besonders wichtige unscharfe Mengen sind diejenigen, deren Zugehörigkeitsfunktion entweder
monoton steigend, monoton fallend oder glockenförmig ist. Die durch sie charakterisierten unscharfen Mengen heißen auch konvex. Beispiele sind die unscharfen Mengen für die Begriffe kalt, angenehm und heiß. Als Grundmenge wird das Intervall von Temperaturwerten zwischen 15C und 27
C betrachtet. Abbildung 3.1 zeigt die Zugehörigkeitsfunktionen.
heiß
1
1
2
15 16 17 18 19 20 21 22 23 24 25 26 27
temp
kalt
1
1
2
15 16 17 18 19 20 21 22 23 24 25 26 27
temp
angenehm
1
1
2
15 16 17 18 19 20 21 22 23 24 25 26 27
temp
Abbildung 3.1
Diese drei Mengen können noch um zwei weitere ergänzt werden, nämlich kühl und warm. Die
Zugehörigkeitsfunktionen aller drei Mengen zusammengenommen haben den in Abbildung 3.2 dargestellten Verlauf.
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 8
kalt
angekühl nehm warm
heiß
1
1
2
15 16 17 18 19 20 21 22 23 24 25 26 27
temp
Abbildung 3.2
3.2. Repräsentationsformen für unscharfe Mengen
In der Praxis, d.h. in der Fuzzy-Regelung, verwendet man gerne statt der S-förmigen oder glockenförmigen Funktionen geglättete Funktionen. Mit ihnen lassen sich die Operationen, die man bei der
Verknüpfung von unscharfen Mengen benutzt, leichter ausführen. Abbildung 3.3 zeigt für die fünf
Mengen kalt, kühl, angenehm, warm und heiß geglättete Zugehörigkeitsfunktionen.
kalt
angekühl nehm warm
heiß
1
1
2
15 16 17 18 19 20 21 22 23 24 25 26 27
temp
Abbildung 3.3
Definition 3.4 (-Funktionen)
Die Funktion : U [0, 1] ist eine Funktion mit zwei Parametern, definiert durch
falls u
0,
(u; , ) (u ) /( ), falls u
1,
falls u
Definition 3.5 (L-Funktion)
Die Funktion L: U [0, 1] ist eine Funktion mit zwei Parametern, definiert durch
1,
L(u; , ) ( u ) /( ),
0,
falls u
falls u
falls u
Definition 3.6 (-Funktion)
Die Funktion : U [0, 1] ist eine Funktion mit drei Parametern, definiert durch
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 9
0,
(u ) /( ),
(u; , , )
( u ) /( ),
0,
falls u
falls u
falls u
falls u
Definition 3.7 (-Funktion)
Die Funktion : U [0, 1] ist eine Funktion mit vier Parametern, definiert durch
0,
(u ) /( ),
(u; , , , ) 1,
( u ) /( ),
0,
falls u
falls u
falls u
falls u
falls u
Definition 3.8 (Zadehs S-Funktion)
Die Funktion S: U [0, 1] ist eine Funktion mit drei Parametern, definiert durch
0,
2
u
2
,
S (u; , , )
2
1 2 u m,
1
,
füru
für u
für u
füru
Dabei ist = ( + )/2.
Entsprechend wie die S-Funktion eine fließendere Variante der -Funktion ist, kann man Zadehs
glockenförmige -Funktion als fließendere Variante der -Funktion betrachten. Sie lässt sich mit
Rückgriff auf die S-Funktion in folgender Weise definieren:
u
S (u; , / 2, ),
1 S (u; , / 2, ), u
(u; , )
3.3. Eigenschaften unscharfer Mengen
Definition 3.9 (Unterstützungsmenge)
Die Unterstützungsmenge einer unscharfen Menge A ist definiert durch
S(A) = {x X | A(x) > 0}
Definition 3.10 (Breite)
Die Breite einer konvexen unscharfen Menge A mit der Unterstützungsmenge S(A) ist definiert
durch
width(A) = sup(S(A)) inf(S(A))
= sup(A) x A: x und > 0 x A: x >
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 10
= inf(A) x A: x und > 0 x A: x <
Definition 3.11 (Kern)
Der Kern einer unscharfen Menge A ist definiert durch
nucleus(A) = {x X | A(x) = 1}
Enthält nucleus(A) nur ein Element, so heißt dieses der Peak von A.
Definition 3.12 (Höhe)
Die Höhe einer unscharfen Menge A ist definiert durch
height (A ) sup A ( x)
xX
A heißt normal, wenn height(A) = 1; A heißt subnormal, wenn height(A) < 1.
Definition 3.13 (konvex)
Eine unscharfe Menge A heißt konvex genau dann, wenn
x, y X [0, 1]: A(x + (1)y) min(A(x), A(y))
Definition 3.14 (-Schnitt)
Sei A eine unscharfe Menge und [0, 1]. Der -Schnitt von A ist die Menge
[A] = {x X | A(x) }
1
1
2
y
x
Abbildung 3.i
Satz 3.1
Ist eine Zugehörigkeitsfunktion und sind , [0, 1], dann gilt
(a) []0 = X
(b) [] []
(c)
Satz 3.2
Sei eine Zugehörigkeitsfunktion. Dann ist
( x) sup min( , ( x))
0 ,1
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 11
Zwischen konvexen unscharfen Mengen und den -Schnitten besteht folgender Zusammenhang:
Eine unscharfe Menge A ist konvex genau dann, wenn ihre -Schnitte konvex im klassischen Sinn
sind.
Die -Schnitte als scharfe Mengen sind konvex, wenn sie zusammenhängende Intervalle sind.
3.4. Operationen auf unscharfen Mengen
Definition 3.15 (Gleichheit)
Zwei unscharfe Mengen A und B sind gleich (A = B), wenn gilt
x X: A(x) = B(x)
Definition 3.16 (Teilmenge)
Die unscharfe Menge A ist Teilmenge der unscharfen Menge B (A B), wenn gilt
x X: A(x) B(x)
Definition 3.18 (t-Norm)
Eine Funktion T: [0, 1]2 [0, 1] heißt t-Norm, wenn sie die folgenden Bedingungen erfüllt:
T-1: T(a, 1) = a
T-2: a b T(a, c) T(b, c)
T-3: T(a, b) = T(b, a)
T-4: T(a, T(b, c)) = T(T(a, b), c)
(neutrales Element)
(Monotonie)
(Kommutativität)
(Assoziativität)
Lemma 3.1
a b c d T(a, c) T(b, d)
Lemma 3.2
Für jedes a gilt: T(0, a) = 0.
Definition 3.19 (t-Conorm)
Eine Funktion : [0, 1]2 [0, 1] heißt t-Conorm, wenn sie die folgenden Bedingungen erfüllt:
-1: (a, 0) = a
-2: a b (a, c) (b, c)
-3: (a, b) = (b, a)
-4: (a, (b, c)) = ((a, b), c)
(neutrales Element)
(Monotonie)
(Kommutativität)
(Assoziativität)
Definition 3.20 (Durchschnitt und Vereinigung für unscharfe Mengen)
Seien A und B unscharfe Mengen. Der Durchschnitt bzw. die Vereinigung von A und B sind
definiert durch:
A T B = C C(x) = T(A(x), B(x))
A B = C C(x) = (A(x), B(x))
Beispiele für t-Normen und t-Conormen:
(T, ) mit (-1, ), definiert durch
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 12
a b 1 ab
T (a, b) max
,0
1
ab
(a, b) min a b
,1
1
heißt parametrisierte Weber-Familie. Für = 0 erhält man das Paar (TLuka, Luka), für das
Paar (Tprod, prod). Für -1 erhält man das Paar (T-1, -1) mit
a, falls b 1
T1 (a, b) b, falls a 1 " drastischesPr odukt"
0, sonst
fallsb 0
a,
1 (a, b) b,
1,
falls a 0 " drastische Summe"
sonst
(T, ) mit > 0, definiert durch
T ( a , b)
ab
(1 )( a b ab )
( a , b)
a b ab (1 ) ab
1 (1 ) ab
heißt Hamacher-Familie.
(Tp, p) mit p > 0, definiert durch
Tp (a, b) 1 min (1 a) p (1 b) p
p (a, b) min a p b p
1
p
1
p
,1
,1
heißt Yager-Familie. Aus den Normen der Yager-Familie erhält man für p 0 das Paar (T-1, -1)
und für p das Paar (min, max).
Definition 3.21 (Archimedische Normen)
Seien T: [0, 1]2 [0, 1] und : [0, 1]2 [0, 1] zwei Funktionen.
(a) T heißt Archimedische t-Norm genau dann, wenn T eine stetige t-Norm ist und für alle a
(0, 1) gilt: T(a, a) < a.
(b) heißt Archimedische t-Conorm genau dann, wenn eine stetige t-Conorm ist und für alle
a (0, 1) gilt: (a, a) > a.
Satz 3.3
Eine Funktion T: [0, 1]2 [0, 1] ist genau dann eine Archimedische t-Norm, wenn eine streng
monoton fallende stetige Funktion f: [0, 1] [0, ] existiert mit
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 13
(i) f(1) = 0
(ii) T(a,b) = f(-1)(f(a) + f(b))
Dabei ist f(-1) die Pseudo-Inverse von f, definiert durch
x 0,1 f ( x) y,
f ( 1) ( y)
0,
falls y 0, f (0)
falls y f (0),
Analog zu der Repräsentation von t-Normen nach Satz 3.3 kann jede t-Conorm durch eine streng
monoton wachsende stetige Funktion g: [0, 1] [0, ] dargestellt werden, die folgende Eigenschaften hat:
(i) g(0) = 0
(ii) (a, b) = g(-1)(g(a) + g(b))
Dabei ist g(-1) die Pseudoinverse von g, definiert durch
x 0,1 g( x) y, falls y 0, g(1)
g ( 1) ( y)
falls y g(1),
1,
Definition 3.22 (Komplement)
Eine Funktion n: [0, 1] [0, 1] heißt Negation, wenn sie die folgenden Bedingungen erfüllt:
n-1: n(0) = 1
n-2: n(1) = 0
n-3: a b n(a) n(b)
Jeder t-Norm T wird durch eine strikte Negation n eine duale t-Conorm n zugeordnet, für die gilt:
n(a, b) = n(T(n(a), n(b)))
Eine nicht-Archimedische t-Norm ist die -Norm von Dubois und Prade. Sie ist definiert durch
( a , b)
ab
max ( a , b, )
wird als Schranke benutzt. Für = 0 ist = min, für = 1 ist = ab. Für zwischen 0 und 1
liegt der Wert von zwischen dem Minimum und dem Produkt.
0 ( a , b)
ab
min ( a , b) . 1 = ab ist unmittelbar zu sehen. Es gilt
max ( a , b, 0)
a b / ,
min( a, b),
( a , b)
füra, b
sonst
Definition 3.23 (Durchschnittsoperator)
(a) Der Durchschnittsoperator für und ist definiert durch
A undB ( x) min ( A ( x), B ( x)) (1 )
A ( x) B ( x)
2
wobei [0, 1].
(b) Der Durchschnittsoperator für oder ist definiert durch
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 14
AoderB ( x) max( A ( x), B ( x)) (1 )
A ( x) B ( x)
2
wobei [0, 1].
Definition 3.24 (Kompensationsoperator)
Der Kompensationsoperator oder -Operator für n Zugehörigkeitsfunktionen 1, ..., n ist definiert durch
n
( x) i ( x)
i 1
(1 )
n
1 (1 i ( x))
i 1
wobei [0, 1].
Definition 3.25 (Beschränkte Summe)
Die beschränkte Summe zweier unscharfer Mengen A und B ist definiert durch
A B min( 1, A ( x) B ( x)) / x
xX
wobei + die arithmetische Summe ist.
Definition 3.26 (Beschränkte Differenz)
Die beschränkte Differenz zweier unscharfer Mengen A und B ist definiert durch
AB max( 0, A ( x) B ( x)) / x
xX
wobei die arithmetische Summe ist.
Definition 3.27 (Produkt)
Das Produkt zweier unscharfer Mengen A und B ist definiert durch
A B A ( x) B ( x) / x
xX
Definition 3.28 (Potenz)
Die -te Potenz einer unscharfen Menge A, wobei , ist definiert durch
A ( A ( x)) / x
xX
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 15
4. Unscharfe Relationen
4.1. Grundlegende Definitionen
Definition 4.1 (Charakteristische Funktion einer scharfen Relation)
Ist R X1 ... Xn, dann ist R: X1 ... Xn {0, 1} eine charakteristische Funktion von R
genau dann, wenn für alle (x1, ..., xn) (xi Xi) gilt:
falls ( x1 ,..., xn ) R
falls ( x1 ,..., xn ) R
1,
0,
R ( x1 ,..., xn )
Definition 4.2 (Zugehörigkeitsfunktion einer unscharfen Relation)
Sind X und Y überabzählbare (kontinuierliche) Universen und R: X Y [0, 1], dann ist
R
R
( x, y) /( x, y)
X Y
eine zweistellige unscharfe Relation über X Y. Sind X und Y abzählbare (diskrete) Universen,
dann ist
R
R
( x, y) / ( x, y)
XY
Die Definition der unscharfen Relationen wird vom zweistelligen auf den n-stelligen Fall in
folgender Weise erweitert:
R(x1, ..., xn)/(x1, ..., xn)
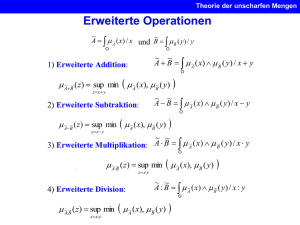
4.2. Operationen auf unscharfen Relationen
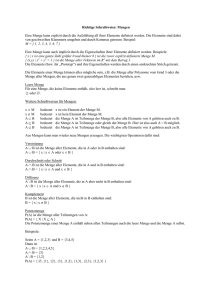
Beispiele für unscharfe Relationen: Auf den Mengen X = {x1, x2, x3} und Y = {y1, y2, y3, y4}
werden die folgenden beiden Relationen definiert.
R = "x ist beträchtlich größer als y"
R(x, y) =
x1
y1
0.8
y2
1
y3
0.1
y4
0.7
x2
x3
0
0.9
0.8
1
0
0.7
0
0.8
S = "y liegt sehr nahe bei x"
S(x, y) =
x1
y1
0.4
y2
0
y3
0.9
y4
0.6
x2
x3
0.9
0.3
0.4
0
0.5
0.8
0.7
0.5
Definition 4.3 (Durchschnitt und Vereinigung)
Seien R und S zweistellige Relationen über X Y, T eine t-Norm und eine t-Conorm. Der
Durchschnitt von R und S ist definiert mittels der Zugehörigkeitsfunktion
RS(x, y) = T(R(x, y), S(x, y))
Die Vereinigung von R und S ist definiert mittels der Zugehörigkeitsfunktion
RS(x, y) = (R(x, y), S(x, y))
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 16
Definition 4.4 (Projektion)
Sei R U1 ... Un. Sei (i1, ..., ik) eine Teilfolge der Folge (1, ..., n) und (j1, ..., jl) die bezüglich
(1, ..., n) komplementäre Teilfolge zu (i1, ..., ik). Sei V U i1 ... U i k . Die Projektion von R auf V
ist definiert durch
R V sup R ( x1 ,..., xn ) /( xi1 ,..., xik )
V x j1 ,..., x jl
Für zweistellige Relationen R X Y ergibt sich
R Y sup R ( x, y) / y
Y
x
Definition 4.5 (Zylindrische Erweiterung)
Sei U = U1 ... Un. Sei (i1, ..., ik) eine Teilfolge der Folge (1, ..., n) und (j1, ..., jl) die bezüglich
(1, ..., n) komplementäre Teilfolge zu (i1, ..., ik). Sei V U i1 ... U i k und sei S V. Die zylindrische Erweiterung von S in U ist definiert durch
ze( S ) S ( xi1 ,..., xik ) /( x1 ,..., xn )
U
Im zweistelligen Fall, wobei A eine unscharfe Menge über Y sei, ist die zylindrische Erweiterung
von A auf X Y die Menge aller Paare (x, y) X Y mit dem Zugehörigkeitswert gleich F(y):
ze( A)
A
( y) /( x, y)
X Y
Definition 4.6 (Komposition)
Sie A eine unscharfe Menge über X und R eine unscharfe Relation über X Y. Ist die Projektion
mittels Supremum und der Durchschnitt mittels Minimum definiert, dann ist die Komposition von
A und R die unscharfe Menge B über Y, definiert durch
B = A o R = ze(A) R|Y
Ist die Projektion mittels Minimum und der Durchschnitt mittels Maximum definiert, dann ist
B ( y) max min ( A ( x), R ( x, y))
x
Diese Komposition heißt max-min-Komposition. Ist die Projektion mittels Produkt und der
Durchschnitt mittels Maximum definiert, dann ist
B ( y) max A ( x) R ( x, y)
x
Diese Komposition heißt max-Produkt-Komposition.
Sei R eine unscharfe Relation über X Y und S eine unscharfe Relation über Y Z. Da R und S
über verschiedenen Bereichen definiert sind, kann man nicht direkt den Durchschnitt beider bilden.
Um eine an den Durchschnitt angenäherte Operation durchzuführen, bildet man zunächst die zylindrischen Erweiterungen von R auf X Y Z und S auf X Y Z, danach den Durchschnitt und
von diesem die Projektion auf X Z. Die gesamte Operation ist also definiert durch
OP(R, S) = (ze(R) ze(S))|X
Z
Formal dargestellt ergibt sich OP(R, S) durch die Abarbeitung der folgenden Einzeloperationen:
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 17
R R ( xi , y j ) /( xi , y j )
Die Mengen R und S:
S S ( y j , z k ) /( y j , z k )
X Y
Y Z
Die Erweiterungen von R und S auf X Y Z:
ze( R)
R
ze(S )
( xi , y j ) /( xi , y j , z k )
X Y Z
ze( R) ze(S )
Durchschnitt:
S
( y j , z k ) /( xi , y j , z k )
X Y Z
min(
R
( xi , y j ), S ( y j , z k )) /( xi , y j , z k )
X Y Z
ze( R) ze(S )
Projektion auf X Z:
X Z
X Z
sup min( R ( xi , y j ), S ( y j , z k )) /( xi , z k )
j
Diese Operation heißt auch sup-min-Komposition von R und S, geschrieben R o S. Sie ist von
großer Bedeutung für die Theorie unscharfer Mengen.
4.3. Das Erweiterungsprinzip
Definition 4.7 (Erweiterungsprinzip)
Seien A1, ..., An unscharfe Mengen über den Universen U1, ..., Un und sei f eine scharfe Funktion
f: U1, ..., Un V. f wird so erweitert, daß die resultierende Funktion auf A1, ..., An definiert ist
und eine unscharfe Menge F über V liefert Die Erweiterung von f ergibt die folgende
Zugehörigkeitsfunktion für F
sup
min( A1 (u1 ),..., An (u n )),
F (v) u1 ,..., un f (u1 ,..., un )v
0,
falls f 1 (v) existiert
sonst
Als Menge geschrieben ergibt dies
F
U1 ...U n u1 ,..., u n
sup
f ( u1 ,..., u n ) v
min( A1 (u1 ),..., An (u n )) / f (u1 ,..., u n )
Im zweistelligen Fall und für diskrete Bereiche erhält man
f ( A , A ) ( y)
1
2
x1 , x2
max
f ( x1 , x2 ) y
min( A1 ( x1 ), A2 ( x2 ))
5. Approximatives Schließen
5.1. Linguistische Variable
Definition 5.1 (Linguistische Variable)
Eine linguistische Variable ist ein Quadrupel (X, LX, X, MX) mit folgenden Komponenten:
X
LX
X
symbolischer Name einer linguistischen Variablen
Menge der linguistischen Werte für X
physikalischer Wertebereich, aus dem die Werte für X stammen
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
MX
Seite 18
semantische Funktion, die jedem Element lx aus LX eine unscharfe Menge lx über X
zuordnet
Beispiel: (Temperatur, {kalt, kühl, angenehm, warm, heiß}, [-10C, 35C], MTemperatur) ist eine linguistische Variable. MTemperatur ist definiert durch:
35
MTemperatur(kalt)
=
L(x; 18, 20) /x
10
35
MTemperatur(kühl)
=
(x; 17.5, 19.5, 21.5) /x
10
35
MTemperatur(angenehm) =
(x; 19, 21, 23) /x
-10
35
MTemperatur(warm)
=
(x; 20.5, 22.5, 24.5) /x
-10
35
MTemperatur(kalt)
=
(x; 22, 24) /x
-10
5.2. Unscharfe Aussagen
Definition 5.2 (Unscharfe atomare Aussage)
Sei (X, LX, X, MX) eine linguistische Variable. Für jedes lx LX ist der Ausdruck
X ist lx
eine unscharfe atomare Aussage. Als Bedeutung der Aussage wird die unscharfe Menge MX(lx) =
lx verwendet oder die Zugehörigkeitsfunktion lx .
Als linguistische Variable wird statt des ganzen Quadrupels (X, LX, X, MX) häufig abkürzend
nur das Symbol X verwendet.
Ist (X, LX, X, MX) eine linguistische Variable, dann kann dem Symbol X durch eine Variablenzuweisung VA ein Wert VA(X) aus X zugewiesen werden. Mittels der Bedeutung der Aussage X ist
lx, d.h. der Zugehörigkeitsfunktion lx , läßt sich dann die Bedeutung der Aussage X ist lx für den
speziellen Wert VA(X) als der Wert lx (VA(X)) angeben.
Definition 5.3 (Konjunktion)
Es seien die folgenden beiden unscharfen atomaren Aussagen gegeben:
p: X ist A und q: X ist B
wobei A und B zwei unscharfe Mengen über demselben Diskurs-Universum U sind. Dann ist die
Konjunktion von p und q als die Aussage
p and q: X ist A B
B
gegeben. Der Durchschnitt ist
definiert. Die Bedeutung der Aussage ist durch A B oder A
mittels einer t-Norm oder eines Kompensationsoperators definiert.
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 19
Definition 5.4 (Disjunktion)
Die Disjunktion der unscharfen atomaren Aussagen
p: X ist A und q: X ist B
wobei A und B zwei unscharfe Mengen über demselben Diskurs-Universum U sind, ist die Aussage
p or q: X ist A B
B
gegeben. Die Vereinigung ist mittels
Die Bedeutung der Aussage ist durch A B oder A
einer t-Conorm oder eines Kompensationsoperators definiert.
Definition 5.5 (Negation)
Die Negation der unscharfen atomaren Aussage
p: X ist A
wobei A eine unscharfe Menge über dem Diskurs-Universum U ist, ist die Aussage
not p: X ist nicht A
' gegeben, wobei A' das Komplement von A ist.
Die Bedeutung der Aussage ist durch A' oder A
Das Komplement wird mittels der n-Axiome definiert.
Seien p: X ist A und q: Y ist B zwei unscharfe atomare Aussagen, wobei A und B über verschiedenen Diskurs-Universen definiert sind, und seien
~
~
und
B B ( y ) / y
A A ( x) / x
Y
X
Dann wird die Bedeutung von p and q, d.h. die Bedeutung der Aussage r: X ist A und Y ist B durch
eine unscharfe Relation über X Y wie folgt definiert:
r ( x, y) min( A ( x), B ( y))
XY
Entsprechend wird die Bedeutung der Aussage s: X ist A oder Y ist B durch die folgende unscharfe
Relation definiert:
s ( x, y) max( A ( x), B ( y))
XY
5.3. Unscharfe Implikationen
Definition 5.6 (Implikation)
Sind p und q unscharfe Aussagen, dann ist
if p then q
eine unscharfe Implikation. Sind p und q die Bedeutungen der beiden Teilaussagen, dann ist
die Bedeutung der Implikation durch die Zugehörigkeitsfunktion zu einer Relation R gegeben:
R = p op q
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 20
Definition 5.7 (Mehrwertige Logik)
In der mehrwertigen Logik L ist die Menge der Wahrheitswerte das Intervall [0, 1]. Sei P die
Menge aller unscharfen Aussagen. Der Wahrheitswert einer Aussage p P wird durch die
Abbildung
v: P [0, 1]
bestimmt.
Die Vorgehensweise zur Bestimmung des Wahrheitswertes der Implikation in der zweiwertigen
Logik wird auf die Logik L in folgender Weise übertragen:
(1)
(2)
(3)
(4)
(5)
Gegeben sei die unscharfe Implikation "if X ist A then Y ist B".
Die Implikation wird in die Disjunktion "not X ist A or Y ist B" umgewandelt.
' , wird mittels der Differenz 1 . gebildet.
Das Komplement von A , A
' und B
werden gebildet.
Die zylindrischen Erweiterungen von A
' und B
wird mittels Maximum gebildet.
Die Vereinigung von A
not X ist A or Y ist B ( x, y) max ( ze(A ') ( x, y), ze( B) ( x, y))
max (1 ze( A ) ( x, y), ze( B) ( x, y))
Kleene-Dienes-Implikation (auch Dienes-Rescher-Implikation genannt) Diese Implikation basiert
auf der Äquivalenz p q p q in der klassischen Logik. Die Relation wird mit Rb bezeichnet.
b ze (A
') ze ( B
)
R
R b ( x, y) max (1 ze(A) ( x, y), ze( B) ( x, y))
Lukasiewicz-Implikation Auch diese Implikation basiert auf der Äquivalenz p q p q in
der klassischen Logik. Für die Repräsentation von wird die beschränkte Summe verwendet. Die
Relation wird mit Ra bezeichnet.
a ze ( A
') ze ( B
)
R
Ra ( x, y) min (1, 1 ze(A) ( x, y) ze( B) ( x, y))
Zadeh-Implikation Diese Implikation basiert auf der Äquivalenz p q (p q) p in der
zweiwertigen Logik. Die Relation wird mit Rm bezeichnet.
m ( ze ( A
) ze ( B
)) ze (A
')
R
R m ( x, y) max (min ( ze(A) ( x, y), ze( B) ( x, y)),1 ze(A) ( x, y))
Stochastische Implikation Diese Implikation beruht auf der aus der Wahrscheinlichkeitstheorie
stammenden Gleichung für eine bedingte Wahrscheinlichkeit P(B|A) = 1 P(A) + P(A)P(B). Hier
wird der Durchschnitt durch eine Multiplikation repräsentiert. Die Relation wird deshalb mit R
bezeichnet.
* ze ( A
') ( ze (A
) ze ( B
))
R
R* ( x, y) min (1,1 ze(A) ( x, y) ze(A) ( x, y) ze( B) ( x, y))
Goguen-Implikation In der mehrwertigen Logik wird für die Wahrheitswerte der Implikation und
ihrer Bestandteile gefordert, daß v(p) v(p q) v(q) gilt. Das ist der Fall, wenn, wie von Goguen
vorgeschlagen, v(p q) = min(1, v(q)/v(p)) gesetzt wird. Dies führt zu der Relation R mit der
folgenden Zugehörigkeitsfunktion:
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 21
R ( x , y ) min (1,
ze ( A ) ( x , y )
ze ( B) ( x , y )
)
Gödel-Implikation Diese Implikation ist in der mehrwertigen Logik folgendermaßen definiert:
falls v( p) v(q)
1,
v( p q )
g
v(q), sonst
Aus ihr läßt sich die die unscharfe Relation Rg mit der folgenden Zugehörigkeitsfunktion ableiten:
Rg ( x, y) v( ze(A) ( x, y) ze( B) ( x, y))
g
Sharp-Implikation Diese Implikation ist der Gödel-Implikation ähnlich, jedoch ist sie stärker
eingeschränkt. In der mehrwertigen Logik ist sie folgendermaßen definiert:
1, falls v( p) v(q)
v( p q )
s
0, sonst
Aus ihr läßt sich die die unscharfe Relation Rs mit der folgenden Zugehörigkeitsfunktion ableiten:
Rs ( x, y) v( ze(A) ( x, y) ze( B) ( x, y))
s
Mamdani-Implikation Dies ist die für die Fuzzy-Regelung wichtigste Implikation. Bei ihr wird die
gewöhnliche Implikation p q durch die Konjunktion p q repräsentiert. Dies ergibt die unscharfe
Relation Rc.
c ze (A
) ze ( B
)
R
Rc ( x, y) min ( ze(A) ( x, y), ze( B) ( x, y))
Die für die Implikationen definierten Relationen lassen sich in folgender Weise ordnen:
a R
* R
b R
m R
c
R
a R
R
g R
c
R
g R
s
R
5.4. Inferenzen
Definition 5.8 (Verallgemeinerter modus ponens)
Seien S1 und S2 symbolische Namen für irgendwelche Objektklassen, seien s1 S1 und s2 S2
und seien P1, P2, Q1 und Q2 Eigenschaften der Objekte. Dann ist der verallgemeinerte modus
ponens die folgende Schlußregel
s1 ist Q1
if S1 ist P1 then S2 ist P2
s2 ist Q2
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 22
Definition 5.9 (Kompositionsregel)
Seien s1 und s2 symbolische Namen für irgendwelche Objekte und seien Q1 und Q2 Eigenschaften
der Objekte und sei R eine Relation zwischen Q1 und Q2. Dann ist die Kompositionsregel die
folgende Schlußregel
s1 ist Q1
s1 R s 2
s2 ist Q2
Beispiel
Es seien die sieben unscharfe Mengen des Fuzzy-Reglers wie in Abbildung 5.1 dargestellt gegeben.
NG
NM
NK
PK
1 N
PM
PG
1
2
-6 -5 -4 -3 -2 -1
0
1
2
3
4
5
6
Abbildung 5.1
Es seien die linguistischen Variablen (E, LE, E, ME) und (U, LU, U, MU) gegeben mit E = U = [-6,
6] und LE = LU = {NG, NM, NK, N, PK, PM, PG}. Sei e E und u U und es sei die folgende
Regel gegeben:
if e ist PM then u ist NK
und NK
sind nur durch wenige Werte definiert:
Die Mengen PM
1 / 2 2 / 3 1/ 4 2 / 5 1 / 6
PM
3
3
3
3
1 / 4 2 / 3 1 / 2 2 / 1 1 / 0
NK
3
3
3
3
Die Mamdani-Implikation ergibt also die in der folgenden Tabelle dargestellte Relation auf E U:
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
U
2
1
0
-1
-2
-3
-4
-5
-6
Seite 23
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
1
3
1
3
1
3
1
3
1
3
1
3
2
3
2
3
2
3
1
3
1
3
2
3
1
2
3
1
3
1
3
2
3
2
3
2
3
1
3
1
3
1
3
1
3
1
3
1
3
0
0
2
E
0
0
3
0
0
4
0
0
5
0
0
6
. Damit der Wert mit der RelaSei e = 3 der aktuelle Wert des Fehlers, damit ist e E und e PM
tion, die durch die Mamdani-Implikation gegeben ist, verknüpft werden kann, muß er zunächst in
eine unscharfe Menge über {-6, -5, ..., 5, 6} umgewandelt werden:
e = 0/-6 + 0/-5 + ... + 0/1 + 0/2 + 1/3 + 0/4 + 0/5 + 0/6
Nun muß die zylindrische Erweiterung von e auf E U gebildet werden und dann die Verknüpfung
der beiden Matrizen. In diesem Fall spielt es keine Rolle, ob man für die Verknüpfung die Minimumsbildung oder das Produkt verwendet.
Als Verknüpfung der zylindrischen Erweiterung von e mit der Mamdani-Implikation ergibt sich:
U
2
1
0
-1
-2
-3
-4
-5
-6
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
2
E
0
0
1
3
2
3
2
3
2
3
1
3
0
0
3
0
0
0
0
0
0
0
0
0
4
0
0
0
0
0
0
0
0
0
5
0
0
0
0
0
0
0
0
0
6
Die Projektion auf U ergibt die Menge
u = 0/-6 + 0/-5 + 13 /-4 + 23 /-3 + 23 /-2 + 23 /-1 + 13 /0 + 0/1 + ... + 0/6 NK
Die unscharfe Menge u kann auch noch auf andere Weise in den folgenden beiden Schritten
ermittelt werden:
1. Bestimme für den Eingabewert e = 3 den Wert PM(3) = 23 .
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 24
2. Definiere eine modifizierte Version von NK wie folgt:
NK (u ),
2
PM (3) 3 ,
CNK (u )
falls NK (u ) PM (3) 23
sonst
Die Schritte 1. und 2. werden als das Feuern der Regel "if e ist PM then u ist NK" bezeichnet. Sie
sind in Abbildung 5.2 graphisch repräsentiert.
if e ist PM
1
then u ist NK
NK
1
PM
1
2
CNK
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6
1
2
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6
Abbildung 5.2
Anstelle der umständlichen Kompositionsoperation mit zylindrischer Erweiterung,
Minimumsbildung und Projektion erhält man somit bei der Mamdani-Implikation eine wesentlich
einfachere Vorgehensweise zur Bestimmung von CNK(u). Gegeben sei der scharfe Eingabewert e*.
Dann ist
CNK(u) = min(PM(e*), NK(u))
5.5. Regelmengen
Seien (X, LX, X, MX) und (Y, LY, Y, MY) linguistische Variable. Es sei eine Menge von n Regeln
zwischen den Variablen X und Y gegeben. Jede Regel in der Menge wird in folgender Weise
dargestellt:
if x ist lx(k) then y ist ly(k), für k = 1, ..., n
Dabei ist x X und y Y, lx(k) ist der linguistische Wert von X in der k-ten Regel, entsprechend
für ly(k), lx(k) LX bzw. ly(k) LY und "x ist lx(k)" wird interpretiert durch
~~ ( k )
l x lx( k ) ( x) / x
X
entsprechend "y ist ly(k)". Die Mamdani-Implikation der k-ten Regel für alle k = 1, ..., n ist definiert
durch
~
Rc( k ) min( lx( k ) ( x), ly( k ) ( y)) /( x, y)
XY
Die Zugehörigkeitsfunktion * des scharfen Eingabewerts x* ist
1, falls x x *
0, sonst
* ( x)
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 25
Die Bedeutung der gesamten Regelmenge ist definiert durch
n
c R
(ck )
R
k 1
Die Zugehörigkeitsfunktion dieser Relation ist
Rc ( x, y) max R(k) ( x, y) max min ( lx(k) ( x), ly(k) ( y))
k
k
c
Das Ergebnis des Feuerns einer ganzen Regelmenge ist dann die unscharfe Menge
x * R
c
Y
Y ( y) max min (lx(k) ( x*), ly(k) ( y))
k
Diese Art des Feuerns einer Menge von Regeln durch Komposition heißt kompositionsbasierte
(1) , ...,
Inferenz. Wird jede Regel für sich gefeuert, dann erhält man n gestutzte unscharfe Mengen cly
( n) , für jede Regel eine, mit den Zugehörigkeitsfunktionen
cly
k: lx(k) ( x) min ( lx(k) ( x*), ly(k) ( y))
Diese Art des Feuerns einer Menge von Regeln, indem jede Regel einzeln gefeuert wird, heißt
Einzelregel-basierte Inferenz.
5.5.2. Eigenschaften von Regelmengen
Gegeben sei ein Fuzzy-Regler mit den linguistischen Variablen E, E und U, LE = L E = LU = {NG,
NK, N, PK, PG}, E = E = U und Regeln der folgenden Art:
if e ist NG and e ist NG then u ist PG
if e ist N and e ist NK then u ist NK
Abbildung 5.3 zeigt die Regeln des Fuzzy-Reglers in tabellarischer Form. Freie Felder kennzeichnen Fälle, bei denen für eine bestimmte Situation keine Regel existiert.
Abbildung 5.3
Die allgemeine Form einer Regel aus der Tabelle von Abbildung 5.3 ist
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 26
if e ist le(k) and e ist l e (k) then u ist lu(k),
k = 1, ..., n
Das Ergebnis einer Regelanwendung für scharfe Eingabewerte e* und e * wird mit OUT(e*, e *)
bezeichnet. Es ist OUT(e*, e *) lu ( k ) .
Vollständigkeit
Definition 5.10 (Vollständigkeit)
Eine Menge von unscharfen Regeln heißt vollständig, wenn sie für jede Kombination von
Eingabewerten einen geeigneten Ausgabewert liefert:
e, e : height(OUT(e, e ) > 0
Konsistenz
Definition 5.11 (Inkonsistenz)
Eine Menge von unscharfen Regeln heißt inkonsistent, wenn sie mindestens zwei Regeln mit
derselben linken aber verschiedenen rechten Seiten enthält.
Stetigkeit
Zwei Regeln in der Matrix von Abbildung 5.3 heißen benachbart, wenn die Zellen ihrer Ergebnisse
nebeneinander liegen.
Definition 5.12 (Stetigkeit)
Eine Menge von unscharfen Regeln heißt stetig, wenn sie keine Paare benachbarter Regeln mit
disjunkten unscharfen Ausgabemengen enthält.
Interaktion
Definition 5.13 (Interaktion)
Sei R die unscharfe Relation, die man durch Kombination aller Regeln einer Regelmenge erhält
( k ) die Ergebnisse der Einzelregel-Inferenzen (k = 1, ..., n). Sei
und clu
comb e * R
U
n
indiv clu
(k)
U
k 1
Eine Menge vvon unscharfen Regeln interagiert, wenn
comb U
indiv
U
6. Entwurf eines Fuzzy-Reglers
6.1. Architektur eines Fuzzy-Reglers
Ein Fuzzy-Regler besteht aus drei Modulen: einem Fuzzifizierungsmodul (FM), einer Wissensbasis
und einem Defuzzifizierungsmodul (DM). Das Fuzzifizierungsmodul und das Defuzzifizierungsmodul können jeweils aus zwei Komponenten bestehen, die Wissensbasis besteht aus den beiden
Komponenten Regelbasis und Datenbasis. Abbildung 6.1 zeigt die Architektur eines Fuzzy-Reglers.
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 27
Scharfer Prozeßzustand
Werte
Scharfe Steuerungsausgabe
Werte
FM
DM
Denormalisierung
DM-F1
Normalisierung
FM-F1
obligatorisch
Inferenzmaschine
Regelbasis
Fuzzifizierung
FM-F2
optional
Defuzzifizierung
FM-F2
Bedeutungsrepräsentation
Datenbasis
Regelbasis
Berechnungsprozeß
symbolische Repräsentation
Informationsfluß
Übersetzung symbolisch - Bedeutung
Abbildung 6.1
6.1.1. Das Fuzzifizierungsmodul
Das Fuzzifizierungsmodul kann aus den beiden Komponenten FM-F1 und FM-F2 bestehen, besteht
aber zumindest aus der Komponente FM-F2. Die Komponenten haben folgende Funktionen:
1. FM-F1 normalisiert die Eingabe, falls ein normalisiertes Diskurs-Universum vorhanden ist. Die
Normalisierung ist eine skalare Transformation, die die physikalischen Werte des Prozeßzustands in die normalisierte Form abbildet.
2. FM-F2 wandelt scharfe Eingabewerte in unscharfe Mengen um, damit sie als Eingabe für die
Regelmenge des Fuzzy-Reglers benutzt werden können.
Der Entwurfsparameter für das Fuzzifizierungsmodul ist
Auswahl einer Fuzzifizierungsstrategie
6.1.2. Die Wissensbasis
Die Wissensbasis besteht aus den Komponenten Datenbasis und Regelbasis. Die Datenbasis stellt
die für die anderen Module bzw. Komponenten erforderlichen Informationen bereit. Dazu gehören:
Unscharfe Mengen, die die Bedeutung der linguistischen Variablen des Prozeßzustands und der
Ausgabevariablen repräsentieren.
Physikalische Wertebereiche und ihre normalisierten Entsprechungen zusammen mit Skalarfaktoren für die Normalisierung bzw. Denormalisierung.
Wichtige Entwurfsparameter für die Datenbasis sind:
Auswahl von unscharfen Mengen (Zugehörigkeitsfunktionen)
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 28
Auswahl von Skalarfaktoren
Die Regelbasis repräsentiert in strukturierter Form das Wissen und die Strategien einer erfahrenen
Prozeßsteuerungsfachperson mittels Regeln (Implikationen) (vgl. Kapitel 5). Die allgemeine Form
der Regeln ist
if Prozeßzustand then Steuerungsausgabe
Wichtige Entwurfsparameter für die Regelbasis sind:
Auswahl von Variablen für die Beschreibung des Prozeßzustands und der Steuerungsausgabe
Bestimmung der Inhalte der linken und rechten Seiten der Regeln
Auswahl der linguistischen Wertemengen der Variablen
Festlegung der Regelmenge
Für die Inferenzmaschine wird die Einzelregel-basierte Inferenz zugrundegelegt. Entwurfsparameter
für die Inferenz sind:
Festlegung der Bedeutung einer einzelnen Regel
Wahl eines Inferenzverfahrens
Test der Regelmenge auf Konsistenz und Vollständigkeit
6.1.3. Das Defuzzifizierungsmodul
Das Defuzzifizierungsmodul kann aus den beiden Komponenten DM-F1 und DM-F2 bestehen,
besteht aber zumindest aus der Komponente DM-F2. Die Komponenten haben folgende Funktionen:
1. DM-F1 denormalisiert die Ausgabe der Komponente DM-F2, d.h. wandelt sie in einen Wert des
physikalischen Wertebereichs um, falls ein normalisiertes Diskurs-Universum vorhanden ist.
2. DM-F2 wandelt die unscharfe Ausgabe der Wissensbasis in eine scharfe Ausgabe um.
Der Entwurfsparameter für das Defuzzifizierungsmodul ist
Auswahl eines Defuzzifizierungsoperators
6.2. Die Regelbasis
6.2.1. Variablen
Zur Beschreibung von Prozeßzuständen werden folgende Variablen benutzt:
Der Fehler e,
die Änderung des Fehlers e oder e ,
die Summe der Fehler e.
Zur Darstellung der Steuerungsausgabe werden folgende Variablen benutzt:
Die Steuerungsausgabe u,
die Änderung der Steuerungsausgabe u oder u .
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 29
6.2.2. Regelformen
PD-artige Regler
Ein konventioneller PD-Regler wird durch folgende Gleichung beschrieben:
u KP e KD e
Ein PD-artiger Fuzzy-Regler besteht aus unscharfen Regeln der folgenden Struktur:
if e(k) ist linguistischer Wert and e(k) ist linguistischer Wert then u(k) ist linguistischer Wert
PI-artige Regler
Ein konventioneller PI-Regler wird durch folgende Gleichung beschrieben:
u K P e K I edt
Wird diese Gleichung differenziert, dann erhält man
u KP e KI e
Ein PI-artiger Fuzzy-Regler besteht aus unscharfen Regeln der folgenden Struktur:
if e ist linguistischer Wert and e ist linguistischer Wert then u ist linguistischer Wert
P-artige Regler
Ein P-artiger Fuzzy-Regler besteht aus unscharfen Regeln der folgenden Struktur:
if e ist linguistischer Wert then u ist linguistischer Wert
PID-artige Regler
Ein konventioneller PID-Regler wird durch folgende Gleichung beschrieben:
u K P e K D e K I edt
Ein PID-artiger Fuzzy-Regler besteht aus unscharfen Regeln der folgenden Struktur:
if e ist linguistischer Wert and e ist linguistischer Wert and e ist linguistischer Wert
then u ist linguistischer Wert
Unscharfe Prozeßmodelle
Sei x = (x1, ..., xn) ein Vektor von Variablen, die den Prozeßzustand beschreiben, y die Prozeßausgabevariable und u die Prozeßeingabevariable (Steuerungsvariable). Seien X = X1 ... Xn, Y
und U die Wertebereiche von x, y und u. Ein konventionelles Prozeßmodell wird durch folgende
Gleichungen beschrieben:
x(k+1) = Ax(k) + bTu(k)
y(k) = cTx(k)
u(k) = ky(k)
A ist die Prozeßmatrix, b und c sind Vektoren und k ist ein Skalar. Durch Einsetzen erhält man
folgende Gleichungen:
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 30
x(k+1) = Ax(k) + bTu(k)
u(k) = kcTx(k)
Ein unscharfes Prozeßmodell wird in folgender Weise definiert: LXi sei die Menge der linguistischen Werte der Variablen xi. Ein beliebiges Element aus LXi wird mit lxi bezeichnet. Die Bedeutung von lxi ist durch die unscharfe Menge lx i gegeben. Der unscharfe Prozeßzustandsvektor ist lx
= ( lx 1 , ..., lx n ). Entsprechende Werte für y und u sind LY, ly, LU, lu. Die folgenden Gleichungen
beschreiben das unscharfe Prozeßmodell:
~
~
lx (k+1) = ~
l~
x (k ) l u~ (k ) A
lu ( k ) lx ( k ) K
ist
A ist eine unscharfe Relation auf X U X, gennant unscharfe Prozeßübergangsabbildung. K
eine unscharfe Relation auf X U, genannt die Steuerung.
Das Entwurfsproblem für Fuzzy-Regler ist: Gesucht ist eine unscharfe Relation T , mit deren Hilfe
aus dem aktuellen Prozeßzustand der erwünschte nächste Prozeßzustand bestimmt werden kann:
~
~
lx (k+1) = ~
l~
x (k ) l ~
x (k ) T
erw
A
, dann führt die Aufgabe, T zu bestimmen, zu der Aufgabe, ein geeignetes K
Setzt man T K
zu finden, da A gegeben ist. K repräsentiert den Fuzzy-Regler.
6.2.3. Linguistische Werte
Die allgemeine Form der linguistischen Werte für die Variablen eines Fuzzy-Reglers sind:
Vorzeichen Größe
Die Bedeutung dieser Werte ist für jede Variable einzeln anzugeben. Dies ist in Tabelle 6.1 dargestellt.
negativ
e die aktuelle Prozeßausgabe y liegt
um einen Betrag entsprechend dem
Wert der Größe über dem Sollwert
ysw
die aktuelle Prozeßausgabe y(k) ist
e gegenüber dem vorhergehenden
Wert y(k-1) um einen Betrag
entsprechend dem Wert der Größe
gewachsen
der aktuelle Wert der Steuerungsu ausgabe u(k-1) ist um einen Betrag
entsprechend dem Wert der Größe
zu verkleinern
null
die aktuelle Prozeßausgabe y liegt am
Sollwert ysw
positiv
die aktuelle Prozeßausgabe y liegt
um einen Betrag entsprechend dem
Wert der Größe unter dem
Sollwert ysw
die aktuelle Prozeß- die aktuelle Prozeßausgabe y(k)
ausgabe y(k) hat sich hat sich gegenüber dem
gegenüber dem vor- vorhergehenden Wert y(k-1) um
hergehenden Wert
einen Betrag entsprechend dem
y(k-1) nicht verändert Wert der Größe verringert
der aktuelle Wert der der aktuelle Wert der SteuerungsSteuerungsausgabe
ausgabe u(k-1) ist um einen Betrag
u(k-1) bleibt
entsprechend dem Wert der Größe
unverändert
zu vergrößern
Tabelle 6.1
Für alle drei Variable wird dieselbe Menge linguistischer Werte gewählt:
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 31
LE = LE = LU = {NG, NM, NK, N, PK, PM, PG}
Die Regelmenge ist in tabellarischer Form in Tabelle 6.2 dargestellt.
e
e NG
NM
NK
N
PK
PM
PG
NG
NG
NG
NG
NG
NM
NK
N
NM
NG
NG
NG
NM
NK
N
PK
NK
NG
NG
NM
NK
N
PK
PM
N
NG
NM
NK
N
PK
PM
PG
PK
NM
NK
N
PK
PM
PG
PG
PM
NK
N
PK
PM
PG
PG
PG
PG
N
PK
PM
PG
PG
PG
PG
Gruppe 0
Gruppe 1
Gruppe 2
Gruppe 3
Gruppe 4
Tabelle 6.2
In Abbildung 6.2 sind die Verhältnisse zwischen y und ysw für die Regeln graphisch veranschaulicht.
Will man feinere Abstufungen haben, dann muß man die Menge der linguistischen Werte erweitern.
Allerdings hat dies zur Folge, daß sich die Menge der Regeln quadratisch mit der Anzahl der
linguistischen Werte vergrößert.
Gruppe 0
Gruppe 1
Gruppe 2
Gruppe 3
y
Gruppe 4
y
y
ysw
ysw
ysw
ysw
y
y
ysw
Bereich, in dem y liegt
Abbildung 6.2
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 32
6.2.4. Herleitung von Regeln
Es gibt drei Methoden zur Herleitung von Regeln:
1. Erhebung des Wissens des Prozeßbedieners und des Steuerungsingenieurs. Hierzu werden zwei
Techniken verwendet:
Verbalisierung des Erfahrungswissens des Experten durch Introspektion.
Befragung von Experten mittels ausgefeilter Fragetechnik.
2. Ableitung von Regeln oder einer den Fuzzy-Regler charakterisierenden Relation aus einem
unscharfen Prozeßmodell.
3. Ableitung von Regeln aus einem konventionellen, gewöhnlich nicht linearen Prozeßmodell.
6.3. Die Datenbasis
6.3.1. Auswahl von Zugehörigkeitsfunktionen
Die physikalischen Wertebereiche der Prozeß- und Steuerungsvariablen seien E, E und U. Die
Elemente aus diesen Wertebereichen werden mit denselben Symbolen bezeichnet wie die Prozeßund Steuerungsvariablen, nämlich e, e und u. Die Variablen haben dieselbe Menge linguistischer
Werte, nämlich LE = LE = LU = {NG, NM, NK, N, PK, PM, PG}. Für jeden linguistischen Wert
jeder Variablen muß eine Zugehörigkeitsfunktion definiert werden, insgesamt also 21. Aus
Effizienz- und Speicherplatzgründen wird eine einheitliche, parametrisierte Form der Zugehörigkeitsfunktionen gewählt und zwar in den meisten Fällen die -Funktion, weil sie besonders einfach
ist. Danach werden die linguistischen Werte durch die Funktionen des Typs MX in die Menge der
Zugehörigkeitsfunktionen abgebildet.
Die -Funktionen werden durch verschiedene Größen charakterisiert:
1. Peak. Vgl. Abschnitt 3.3.
2. Linke und rechte Breite. Vgl. Abschnitt 3.3. Peak und linke und rechte Breite sind in Abbildung
6.3 illustriert.
1
peak
left-width right-width
x peak
Abbildung 6.3
3. Schnittpunkte.
Seien lx1 und lx2 zwei Zugehörigkeitsfunktionen, die die Bedeutungen zweier verschiedener
linguistischer Werte lx1 und lx2 der linguistischen Variablen X repräsentieren. Ein Schnittpunkt
zwischen lx1 und lx2 ist ein Wert xschn X mit lx1 (xschn) = lx2 (xschn) > 0. Der Wert lx1 (xschn)
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 33
= lx2 (xschn) heißt auch Schnittpunkthöhe. Die Anzahl der Schnittpunkte zwischen zwei Zugehörigkeitsfunktionen heißt Schnittpunktverhältnis. Abbildung 6.4 veranschaulicht diese
Definitionen.
1
1
1
0.4
x schn
Schnittpunkthöhe = 0.4
Schnittpunktverhältnis = 1
x schn1
x schn 2
Keine Schnittpunkte
Schnittpunktverhältnis = 2
Abbildung 6.4
Die Entscheidungen über Schnittpunkte, über Symmetrie und Breite der -Funktionen und über die
Diskretisierung kontinuierlicher Wertebereiche beeinflussen die Qualität des Entwurfs eines FuzzyReglers.
1. Schnittpunkte: Zu jedem linguistischen Wert sollte es mindestens einen zweiten Wert geben, so
daß das Schnittpunktverhältnis zwischen ihren Zugehörigkeitsfunktionen 1 ist und die Schnittpunkthöhe 0.5.
2. Symmetrie: Bei Einzelregel-basierter Inferenz nach der Mamdani-Implikation ist das Ergebnis
des Feuerns einer Regel eine gestutzte unscharfe Menge. Die Zugehörigkeitsfunktion lu schneidet die horizontale Linie, die den Eingabewert repräsentiert, an zwei Stellen, etwa u1 und u2. Aus
diesen beiden Werten muß bei der Defuzzifizierung ein scharfer Ausgabewert bestimmt werden.
Dies ist am besten in eindeutiger Weise möglich, wenn die Zugehörigkeitsfunktion symmetrisch
ist.
3. Breite: Die Zugehörigkeitsfunktionen zweier aufeinanderfolgender linguistischer Werte der Eingabevariablen e müssen die Breitenbedingung erfüllen, damit der Werteverlauf der Ausgabevariablen u stetig ist.
Breitenbedingung: Sind le1 und le2 die Zugehörigkeitsfunktionen zweier aufeinanderfolgender linguistischer Werte le1 und le2 so daß peak( le 1 ) < peak( le 2 ), dann ist
right-width( le 1 ) = left-width( le 2 ) = [peak( le 1 ), peak( le 2 )]
Die Funktionen PK und PM von Abbildung 6.5 (a) erfüllen die Breitenbedingung, die alternativen Versionen von Abbildung 6.5 (b) erfüllen sie nicht.
1
1
PK
PM
e peak 1
e peak 2
PK
PM
e peak 1
(a)
e peak 2
(b)
Abbildung 6.5
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 34
4. Diskretisierte Wertebereiche: Kontinuierliche Wertebereiche werden durch Quantifizierung diskretisiert. Diese erfolgt in zwei Schritten:
Der kontinuierliche Wertebereich wird in eine endliche Anzahl von Segmenten, genannt
Quantifizierungsebenen, unterteilt. Die Segmente heißen generische Elemente, die Menge der
generischen Elemente bildet das diskrete Diskursuniversum.
Die unscharfe Menge, die die Bedeutung eines linguistischen Werts repräsentiert, wird konstruiert, indem jedem generischen Element ein Zugehörigkeitsgrad zugeordnet wird. Die so
konstruierten unscharfen Mengen werden in Tabellenform dargestellt.
Tabelle 6.3 zeigt die Definition unscharfer Mengen in Tabellenform für den kontinuierlichen
Wertebereich [3.2, +3.2]. Dieser ist in 13 Segmente unterteilt, die mit den Marken -6, -5, ..., 5,
6 versehen sind.
Segmentmarke
6
5
4
3
2
1
0
1
2
3
4
5
6
Segment
e 3.2
3.2 e 1.6
1.6 e 0.8
0.8 e 0.4
0.4 e 0.2
0.2 e 0.1
0.1 e 0.1
0.1 e 0.2
0.2 e 0.4
0.4 e 0.8
0.8 e 1.6
1.6 e 3.2
3.2 e
NG NM NK
1.0 0.3 0.0
0.7 0.7 0.0
0.3 1.0 0.3
0.0 0.7 0.7
0.0 0.3 1.0
0.0 0.0 0.7
0.0 0.0 0.3
0.0 0.0 0.0
0.0 0.0 0.0
0.0 0.0 0.0
0.0 0.0 0.0
0.0 0.0 0.0
0.0 0.0 0.0
N
0.0
0.0
0.0
0.0
0.3
0.7
1.0
0.7
0.3
0.0
0.0
0.0
0.0
PK
0.0
0.0
0.0
0.0
0.0
0.0
0.3
0.7
1.0
0.7
0.3
0.0
0.0
PM
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.3
0.7
1.0
0.7
0.3
PG
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.3
0.7
1.0
Tabelle 6.3
6.3.2. Auswahl von Skalierungsfaktoren
Ein PI-artiger Fuzzy-Regler mit Skalierungsfaktoren zur Normalisierung kann durch folgende Gleichung beschrieben werden:
Nuu(k) = F(Nee(k), Nee(k))
wobei Ne, Ne und Nu die Skalierungsfaktoren für e, e bzw. u sind und F eine nichtlineare
Funktion ist, die den Fuzzy-Regler repräsentiert.
Die Performanzkriterien für einen PI-artigen Fuzzy-Regler sind:
Erwünschter Wert der Überschwingweite OVerw (Overshoot)
Erwünschte Ausregelzeit RTerw (rise-time)
Erwünschte Amplitude bei Oszillationen OSCerw.
Die Performanzmaße für den Regler sind
OV = OV OVerw
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 35
RT = RT RTerw
OSC = OSC OSCerw
Form der heuristischen Regeln für die Anpassung der Skalierungsfaktoren:
Wert der Performanzvariablen = Wert Ne = Wert
Wert der Performanzvariablen = Wert Ne = Wert
Um die Skalierungsfaktoren auf den gewünschten Wert zu bringen wird der Fuzzy-Regler an den
Prozeß angeschlossen und nach jeder Iteration werden die Skalierungsfaktoren nach der folgenden
Vorschrift aktualisiert:
Ne(i+1) = Ne(i) + Ne
Ne(i+1) = Ne(i) + Ne
6.4. Die Inferenzmaschine
Einzelne Regeln
Die allgemeine Form der Regeln ist
if e ist le(k) and e ist le(k) then u ist lu(k) (k = 1, ..., n)
Die Bedeutung einer Regel dieser Form ist durch die folgende unscharfe Relation R ( k ) über E E
U gegeben:
R (k) ( e, e, u) min ( le(k) ( e), le(k) ( e), lu(k) ( u))
Regelmengen
Die Bedeutung einer Menge von Regeln ist die Vereinigung der Bedeutungen der einzelnen Regeln:
R ( e, e, u) max ( R (1) ( e, e, u), ..., R (n) ( e, e, u))
Eingabewerte
Die scharfen Eingabewerte e* und e* werden von dem Fuzzifizierungsmodul in unscharfe Mengen
mit den folgenden Zugehörigkeitsfunktionen umgewandelt:
1,
0,
* E ( e)
falls e e *
sonst
1, falls e e *
0, sonst
*E (e)
Regel-Antezedenzien
Die Zugehörigkeitsfunktionen der Variablen in den Antezedenzien der Regeln, le(k) und le (k) ,
werden in eine Zugehörigkeitsfunktion zusammengefaßt:
ant (e, e) min *E (e), *E (e)
EE
Inferenzen
Durch Komposition von ant und R erhält man den Wert der Steuerungsausgabe U:
U (u) max min ant (e, e), R (e, e)
e,e
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 36
6.5. Defuzzifizierung
Folgende Defuzzifizierungsmethoden werden betrachtet:
Flächenmittelpunkt/Schwerpunkt-Methode (center-of-area/gravity)
Summenmittelpunkt-Methode (center-of-sums)
Mittelpunkt_des_größten_Gebiets-Methode (center-of-largest-area)
Erster_Maximumspunkt-Methode (first-of-maxima)
Mittlerer_Maximumspunkt-Methode (middle_Maximumspunkt-Methode)
Höhen-Mehtode (height)
Keil-Methode
kann eine konvexe Menge oder eine nicht-konvexe Vereinigung mehrerer
Die Ausgabemenge U
konvexer Mengen sein, vgl. Abbildung 6.6. Das scharfe Ergebnis der Defuzzifizierung wird mit u*
bezeichnet.
ist definiert durch
Die Fläche einer unscharfen Menge U
U
(u )du
U
( k ) hängt davon ab, wie das Antezedie klassische Integraloperation ist. Die Höhe von clu
(k)
denz der k-ten Regel mit der Eingabe matcht; sie wird mit fk bezeichnet. Der Peak-Wert von clu
ist identisch mit dem Peak-Wert der ungestutzten unscharfen Menge lu ( k ) . Ist lu ( k ) eine -Funktion, dann wird als ihr Peak-Wert der Mittelpunkt ihres Kerns genommen.
wobei
1
0
Abbildung 6.6
6.5.1. Flächenmittelpunkt/Schwerpunkt-Methode
Für diskrete Wertebereiche (U = {u1, ..., ul}):
l
u*
ui U ( ui )
i 1
l
U ( ui )
l
u max
i
k
i 1
clu( k)
( ui )
l
max
i 1
k
i 1
clu( k)
( ui )
Für kontinuierliche Wertebereiche:
u*
u
U
(u )du
U
U (u )du
U
u max
k
U
max
U
k
clu ( k )
clu ( k )
(u )du
(u )du
Graphische Veranschaulichung in Abbildung 6.7.
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 37
Abbildung 6.7
6.5.2. Summenmittelpunkt-Methode
Für diskrete Wertebereiche (U = {u1, ..., ul}):
l
u*
n
u
i
i 1
k 1
l
clu( k)
( ui )
n
i 1 k 1
clu( k)
( ui )
Für kontinuierliche Wertebereiche:
n
u*
ui clu( k ) (u )du
k 1
U
n
U k 1
clu ( k )
(u )du
Graphische Darstellung wie in Abbildung 6.7.
6.5.3. Mittelpunkt_des_größten_Gebiets-Methode
Diese Methode bestimmt im Falle einer nicht-konvexen Menge den Mittelpunkt der größten konvexen Teilfläche. Graphische Veranschaulichung in Abbildung 6.8.
Abbildung 6.8
6.5.4. Erster_Maximumspunkt-Methode
Definition:
u * inf u U U (u ) sup U (u )
uU
uU
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 38
Eine Variante der Erster_Maximumspunkt-Methode ist die Letzter_Maximumspunkt-Methode:
u * sup u U U (u ) sup U (u )
uU
uU
6.5.5. Mittlerer_Maximumspunkt-Methode
Definition:
inf u U U (u ) sup U (u ) sup u U U (u ) sup U (u )
uU
uU
uU
uU
u*
2
6.5.6. Höhen-Methode
(k) .
Definition: Sei c(k) der Peak-Wert der Menge lu ( k ) und fk die Höhe von clu
n
u*
c
(k)
fk
k 1
n
f
k
k 1
Graphische Veranschaulichung in Abbildung 6.9.
Abbildung 6.9
6.5.7. Keil-Methode
Abbildung 6.h
Der ermittelte Wert u* hat also nichts mit den beiden konvexen Teilmengen zu tun. Das empfindet
man i.a. als kontraintuitiv, deshalb wird in solchen Fällen lieber eine andere Methode verwendet,
z.B. die Mittelpunkt_des_größten_Gebiets-Methode oder die Erster_Maximumspunkt-Methode, bei
denen dieser Fall nicht eintritt.
Bei der Keil-Methode wird ein Keil mit einem voreingestellten Winkel von oben auf die zu defuzzifizierende Menge zubewegt. Von der konvexen Teilmenge, die der Keil als erste berührt, wird der
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 39
Flächenmittelpunkt oder ein anderer geeigneter Wert genommen (z.B. Peak-Wert, Erster Maximumspunkt usw.). Die Vorgehensweise ist in Abbildung 6.10 illustriert.
Abbildung 6.10
Welcher Wert ermittelt wird, hängt von dem eingestellten Winkel und der Ansatzstelle ab. Für einen
spitzen Winkel ergibt sich die Flächenmittelpunkt/Schwerpunkt- oder die Summen-Methode, für
einen stumpfen Winkel die Erster_Maximumspunkt-Methode oder eine ähnliche. Das Ergebnis läßt
sich nicht durch eine Formel wiedergeben, das Verfahren läßt sich nur algorithmisch beschreiben.
6.5.8. Kriterien zur Beurteilung der Defuzzifizierungsmethoden
1. Stetigkeit
Geringe Änderungen der Eingabe sollten geringe Änderungen der Ausgabe zur Folge haben. Im
Falle z.B. eines PD-artigen Fuzzy-Reglers soll also gelten:
0 0: e1 * e2 * e1 * e 2 * u1 * u2 *
2. Eindeutigkeit
Die Defuzzifizierungsmethode sollte einen eindeutigen Wert liefern. Dies leistet z.B. die Mittelpunkt_des_größten_Gebiets-Methode nicht in jedem Fall, nämlich dann nicht, wenn die zu defuzzifizierende Menge aus zwei konvexen Teilmengen der gleichen Form besteht. Abbildung 6.11 illustriert diesen Fall für zwei skalierte (a) und zwei gestutzte (b) Teilmengen.
Abbildung 6.11
3. Plausibilität
Eine Defuzzifizierungsmethode heißt plausibel, wenn ihr Ausgabewert u* ungefähr in der Mitte der
liegt und einen hohen Zugehörigkeitsgrad zu U
besitzt, d.h. einen
Unterstützungsmenge von U
hohen Wert für U(u*).
4. Berechnungsaufwand
Für praktische Anwendungen ist es besonders wichtig, Methoden mit niedrigem Berechnungsaufwand zu wählen. Dieser hängt bei einigen Methoden von der Form der unscharfen Menge ab.
5. Gewichtszählung
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger
Schließen mit unscharfem Wissen
Seite 40
Einige Defuzzifizierungsmethoden verwenden die Höhe der gestutzten Mengen, die als Ergebnis
der Regelanwendung entstehen. Auf diese Weise wird der Anteil der einzelnen Regeln am Ergebnis
besser berücksichtigt.
Technische Universität Chemnitz
Wintersemester 1999/2000
Prof. Dr. Werner Dilger