Fixpunkt Minimierung bei Binnenschiffen
Werbung

Fixpunkt-Minimierung bei
Binnenschiffen
Sebastian Pokutta, Günter Törner
Universität Duisburg - Essen
München 2005
22.04.2005
GOR, München 2005
1
Das Cargo+ Projekt
22.04.2005
Kooperationsprojekt mit dem DST,
Duisburg (Development Center for
Ship Technology and Transport
Systems)
Teil eines umfassenden Projektes,
um Optionen des dreilagigen
Transportes von Containern im
Binnenschiffsverkehr zu untersuchen
Ziel: Bestimmung von optimalen
Beladungsplänen, die die
Fixpunkthöhe minimieren
Ziel: Schnelle Berechnung der
Mindestbrückenhöhe für ein
gegebenes Schiff und dessen
Beladung
GOR, München 2005
2
Brückendurchfahrtshöhen
Abschnitt 1:
Rhein
Zwischen Koblenz (Rhein-km 595)
und Mainmündung (Rhein-km 497),
Streckenlänge: 97 km
Brückenhöhen: > 9,10 m
Abschnitt 2:
Main
Zwischen Mainmündung (Main-km
0) und Bamberg (Main-km 384),
Streckenlänge: 384 km
Brückenhöhen: 4,39 m - 7,71 m
Abschnitt 3:
Main-DonauKanal
Zwischen Bamberg (MDK-km 0)
und Kehlheim (MDK-km 171),
Streckenlänge: 171 km
Brückenhöhen: 5,49 m - 5,53 m
Abschnitt 4:
Donau
Zwischen Kehlheim (Donau-km
2412) und Regensburg (Donau-km
2376), Streckenlänge: 36 km
Brückenhöhen: 5,94 m
Alle Brückenhöhe sind die Höhen über dem sog. HSW (Höchster Schiffbarer Wasserstand). Dies bedeutet insbesondere,
dass an Tagen mit geringerem Wasserstand die Brückenhöhen deutlich höher ausfallen können.
22.04.2005
GOR, München 2005
3
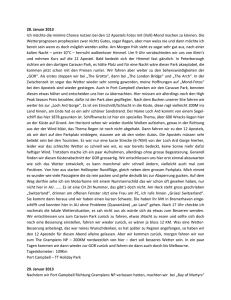
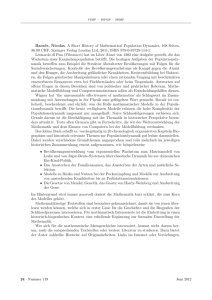
Beispiel: Verfügbarkeit
Mainbrücke Auheim:
350
300
250
200
150
Durchfahrtshöhe
Verfügbarkeit/Jahr*
4,5 m
352
5,0 m
351
5,5 m
348
6,0 m
340
6,5 m
250
7,0 m
0
*Mittelwerte für die Zeitspanne von 1992 - 2001
100
50
Verringerung des Fixpunktes von
6,50 m auf unter 6,00 m erhöht
Verfügbarkeit um 90 Tage und mehr
0
4,5
5
22.04.2005
5,5
6
6,5
7
GOR, München 2005
4
Ziel: Fixpunktminimierung
Herkömmliche Möglichkeiten einer Fixpunktreduzierung:
Aufnahme von Ballastwasser:
Durchaus sinnvoll, aber nicht ausreichend
Gewinn zwischen 0,07 m und 0,08 m
Verringerung der Dicke des Doppelbodens:
Gewinn von etwa 0,15 m
Nicht bei allen alten Schiffen durchführbar
Endgültige physikalische Veränderung!
Verringert das Volumen der Ballasttanks
Stabilitätsprobleme: Das Schiff biegt sich u.U. stark durch
=> geringerer Maximaltiefgang
Aufnahme von Festballast (Stahlplatten bzw. Beton mit Stahlschrott):
Gewinn zwischen 0,02 m und 0,09 m
Aufwendig
Verringerung der effektiven Kapazität
22.04.2005
GOR, München 2005
5
Mathematischer Ansatz
Gegeben:
Binnenschiff
Ladung
Verschiedene Gewichte (2,0 t - 25,0 t)
Verschiedene Containerhöhen
(8,0 ft - 10,0 ft in 0,5 ft Schritten)
“Doppelt lange” Container
Containeranzahl cmax = 156
Freiheitsgrade:
Beladungsplan
Randbedingungen:
Berücksichtigung der Schiffslage
Ziel:
Bestimmung eines Beladungsplan mit
minimaler Fixpunkthöhe
22.04.2005
GOR, München 2005
6
Hydrostatisches Modell
Randbedingungen, Forderungen an Plan (DST):
Möglichst keine Verkrängung
(Energieverbrauch)
Ausschließlich positive Vertrimmung
(nose up)
Stabilität kann vernachlässigt werden
(Binnenschiffe weisen enorm hohe Stabilität
auf)
Modellparameter:
Leichte Feinkalibrierung
Schnelle Berechenbarkeit
Trennung der Ladeplan-abhängigen und unabhängigen Berechnung
Modellierung (UDE):
Variable Schiffstypen
Dreistufiges Verfahren zur
Tiefgangsbestimmung (höhere Genauigkeit):
22.04.2005
Leertiefgänge
Massenabhängige Eintauchung
Rotation durch Momente
GOR, München 2005
7
Hydrostatisches Modell
Schritt 1: Bestimmung der Leertiefgänge
Verschiedene Methoden:
22.04.2005
Elektronisch vermessen
Tiefgänge ablesen
Leertiefgänge errechnen
Nahezu beliebig genau durchführbar
Tiefgangsebene T0(x,y) gegeben durch
die vier Tiefgänge vorne-links, vornerechts, hinten-links und hinten-rechts
GOR, München 2005
8
Hydrostatisches Modell
Schritt 2: Berechnung der ParallelEintauchung TPI
Eintauchung des Schiffes durch
“gleichmäßig” verteilte zusätzliche
Ladung
Verschiedene Möglichkeiten der
Berechnung / Approximation
Berechnung im einfachsten Fall
(Archimedes-Ansatz; Auftrieb =
Verdrängung):
TPI
22.04.2005
M
i
LB
Ergänzende Verfeinerung durch
Einführung des Blockkoeffizienten
(Abweichung
von Quaderform)
Lastabhängige Schwerpunkte
T1(x,y) = T0(x,y) + TPI
Berechnung unabhängig vom
Beladungsplan
GOR, München 2005
9
Hydrostatisches Modell
Schritt 3: Berechnung der Momente
Rotation des Schiffs um seinen
Schwerpunkt
Jeweils in x-Richtung (Krängung) und yRichtung (Trimmung)
Berechnung im einfachsten Fall
(Archimedes-Ansatz; fester
Schwerpunkt):
6
(Pix G x )M i
LB 2
6
Ty 2 (Piy G y )M i
LB
Tx
22.04.2005
Berechnung der Momente Tx und Ty
abhängig
vom Beladungsplan
GOR, München 2005
10
Hydrostatisches Modell
Projektvorgabe (DST): einfaches Modell mit festem Schwerpunkt und Blockkoeffizienten
Begründung: Empirischer Befund der Modellrechnung:
Aussagequalität des einfachen Modells bereits sehr hoch
Beladungsplan verändert sich seltenst durch ein komplexeres Modell
Die exakten Tiefgangswerte werden ohnehin nachträglich erhoben
Erheblicher Performance-Verlust
Tiefgangsfunktion T(x,y) als Basis für die Zielfunktion:
T(x, y) T1(x, y) Tx Ty x
2T
2Tx
y y
B
L
22.04.2005
GOR, München 2005
11
Fehlerbetrachtung
Fehlerquellen:
Gewichtsbestimmung der Container
Positionierung der Container
Bestimmung der Leertiefgänge
Fehlende hydrostatische Parameter der Schiffe
Hohes Alter, keine Bordbücher
“Jedes Schiff ist anders”
Nachträgliche Veränderungen am Schiff
Bewegung des Wasser
Größenordnung des resultierenden Fehlers bis ca. 0,10 m
Kein Fehler, aber ähnlich entscheidend:
Variable Wasserstände
Durch Schleusen erzeugte Sunk- und Schwallwellen können kurzfristige
Schwankungen von ca. 0,3 m - 0,4 m verursachen.
22.04.2005
GOR, München 2005
12
Mathematische Modellierung
Beladungsmatrix
- Modellierung des Containerraums
Angeordnet als Gitter
Reihenanzahl: n
Spaltenanzahl: m
Maximale Anzahl der Container: cmax
Maximale Stapelhöhe: smax
Dicke des Doppelbodens: dd
Höhe Containerstapel (k,l): Ch(k,l)
Hinweis: Die Containerreihenfolge innerhalb
eines Stapels ist aufgrund des gewählten
hydrostatischen Modells irrelevant
22.04.2005
GOR, München 2005
13
Mathematische Modellierung
Berechnung des Fixpunktes:
Definition als höchster Punkt der
Containerladung
Fixpunkt F wird immer in einem
Containerstapel angenommen
Exakte Berechnung des Fixpunktes über
die Lotlänge des Stapels =>
Winkelfunktionen notwendig (schlecht!)
(lineare) Approximation durch:
F(x, y) T(x,y) dd Ch (x, y)
und somit:
F max F(x, y)
x,y
Resultierender Fehler der Approximation
im Millimeter-Bereich, also zu
vernachlässigen
22.04.2005
GOR, München 2005
14
Mathematische Modellierung
Modell:
Ähnlich eines “Generalized Assignment
Problem”, jedoch Minimierung über
Maximum und negative Kostenterme
xijk = 1 <=> Container i auf Position (j,k)
xtol Toleranz der Verkrängung
Restriktionen (2) - (4) kontrollieren Lage
des Schiffs
Restriktion (5) kontrolliert die Stapelhöhe
Restriktion (6) kontrolliert, dass jedes
Container genau einmal geladen wird
min V
subject to
(1) V F( j,k) j {1, ,m},k {1, ,n}
(2) T(bl) T( fl) 0
(3) T( fr) T( fl) xtol
(4) T( fl) T( fr) xtol
(5)
x
ijk
smax
j 1, ,m,k 1, ,n
1ic max
(6)
x
ijk
1 jm,1kn
1 i 1, ,c max
(7) x ijk 0,1 i 1, ,c max , j 1, ,m,k 1, ,n
Hinweis: Modell hier leicht vereinfacht, da
doppelt-lange Container nicht
berücksichtigt werden.
22.04.2005
GOR, München 2005
15
Mathematische Modellierung
Ansatz bestend aus zwei Teilen
Scheduling Heuristik
“Survival of the fittest”
Problem, der frühzeitigen Konvergenz
Berücksichtigt alle Eigenschaften der
Ladung
Ansatz: Koppelung beider Verfahren
22.04.2005
Schnelle Berechenbarkeit
Relativ gute Lösungen
Berücksichtigt nur geometische Maße der
Container
Genetischer Algorithmus
Scheduling Heuristik (SH)
Genetischer Algorithmus (GA)
Schnelle Berechenbarkeit
Kurze Evolution des GA (wg. Startlösung)
Hohe Güte der Lösung der SH verhindert
frühzeitige Konvergenz des GA
Besondere Eigenschaften der Ladung
können durch den GA berücksichtigt
werden
GOR, München 2005
16
Mathematische Modellierung
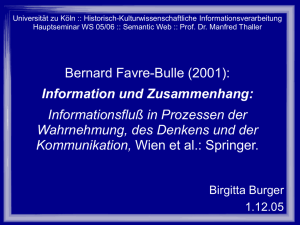
Scheduling Heuristik
Abgeleitet von der “LPT-Regel” (Largest Processing Time first)
Bildet einer “Treppenfunktion”
Hier: Die höchsten Stapelkombinationen zum Heck hin gestapelt und minimale Steigung
für die Treppenfunktion
Für das rein geometrische Problem optimal
Liefert gute Startlösungen
22.04.2005
GOR, München 2005
17
Mathematische Modellierung
Genetischer Algorithmus
Lösungen als Sequenzen
Neue Lösungen durch:
Bewertung einer Lösung mit Hilfe einer sogenannten Fitness-Funktion
Selektion nach Mutation und Crossover abhängig von Fitness der einzelnen Lösungen
Rekombination (Crossover)
Lokalen Veränderungen (Mutationen)
Hier: 2-elitäre Fitness-proportionale Selektion
Problem der frühzeitigen Konvergenz kann mit guten Startlösungen umgangen werden
22.04.2005
GOR, München 2005
18
Mathematische Modellierung
Die folgenden Aussagen beziehen sich auf die vollständige Modellierung inklusive
doppelt-langer Container (als zwei verbundene Standardcontainer).
Ansatz 1: Scheduling-Heuristik + genetischer
Algorithmus
Bearbeitung des Problems in zwei
Schritten:
Geometrische Optimierung, via Heuristik
Massen-berücksichtigende
Feinoptimierung durch genetischen
Algorithmus
Sehr geringer Zeitbedarf ( < 1 Minute )
Sehr geringer Speicherbedarf ( < 5 Mb )
Performance unabhängig von Ladung
Keine Optimalitätskontrolle
Erstmal nicht notwendigerweise
zielführend (Spezialfälle?)
22.04.2005
Ansatz 2 (zum Vergleich): Mixed Integer
Linear Program
Sehr hoher Zeitbedarf ( >> 10 Stunden )
Sehr hoher Speicherbedarf ( >> 200 Mb )
Sehr große Gap ( > 4 %) bei 10 Stunden
Performance sehr instabil
(Ladungsabhängig). Starker Einbruch bei
ein hohen Anzahl von verbundenen
Containern
Optimalitätskontrolle durch untere
Schranke
GOR, München 2005
19
Mathematische Modellierung
Optimalitätsuntersuchung des Ansatzes:
Charakteristika der Kombination aus Scheduling-Heuristik und genetischem
Algorithmus sehr gut.
Integration der LP-Relaxation des Mixed-Integer Linear Program für untere
Schranken. Damit: Gap << 2,00 %
Approximative Reformulierung als Mixed-Integer Linear Program (mit
Äquivalenzklassen).
Fehler durch Approximation sehr klein (<< 3 cm)
Schnellere Berechnung (Gap < 0,01 % nach 2 Stunden, oftmals schon nach Minuten)
Oftmals beweisbare Optimalität des Plans für das approximative Problem
Empririsch: Lösungen nahezu identisch mit denen aus dem Ansatz
In vielen Fällen: Struktursatz => (nahezu) optimale Lösungen weisen
Treppenform auf
22.04.2005
GOR, München 2005
20
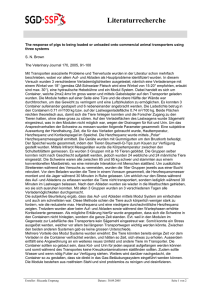
Ergebnisse
22.04.2005
Schnelle Berechenbarkeit sichert den
geforderten Einsatz auf Standard PCs
(und somit direkt auf dem Binnenschiff)
In vielen Fällen: Fixpunktreduzierungen
zwischen 0,40 m und 0,80 m
Selbst bei Beladungsplänen von
erfahrenen “Loadmastern” in vielen
Fällen Fixpunktreduzierungen zwischen
0,20 m und 0,50 m
Gap: 0,01 % - 0,05 %, d.h. < 3 cm
Schranken der LP-Relaxation als
Mindestbrückenhöhe
GOR, München 2005
21
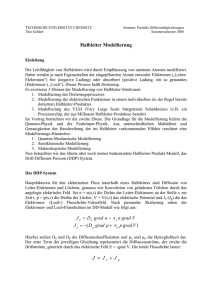
Ergebnisse
Original
5,70 m
19
17
15
13
11
9
7
5
3
1
0,00 m
Optimiert
∆
1
6,06 m
5,53 m
0,53 m
2
6,08 m
5,54 m
0,54 m
3
7,12 m
6,57 m
0,56 m
4
4,90 m
4,36 m
0,54 m
5
5,84 m
5,27 m
0,58 m
6
5,83 m
5,24 m
0,59 m
7
6,01 m
5,38 m
0,63 m
8
5,99 m
5,38 m
0,61 m
9
7,07 m
6,47 m
0,60 m
10
4,90 m
4,30 m
0,60 m
11
5,94 m
5,26 m
0,68 m
12
5,97 m
5,22 m
0,75 m
13
6,22 m
5,43 m
0,79 m
14
6,22 m
5,56 m
0,67 m
15
7,22 m
6,57 m
0,65 m
16
5,05 m
4,41 m
0,63 m
17
6,18 m
5,50 m
0,67 m
18
6,21 m
5,54 m
0,68 m
19
5,85 m
5,28 m
0,57 m
20
6,16 m
5,68 m
0,48 m
Anmerkung: Reale und Computer-generierte Beladungen
22.04.2005
GOR, München 2005
22
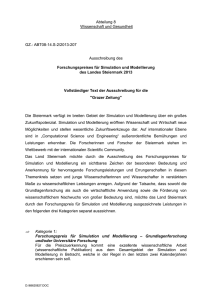
Wirtschaftliche Aspekte
Schiffbarkeit von drei Lagen
an kritischen Tagen
Binnenschiff ist deutlich langsamer als LKW
Kosteneinsparungen gegenüber LKW:
100
90
80
70
Bereich
Bereich
Bereich
Bereich
60
50
40
1
2
3
4
30
20
10
0
std
22.04.2005
opt
Zweilagig: ca. 27 %
Dreilagig: ca. 41%
Stark ansteigender Transportbedarf via
Binnenschiff (Maut verstärkt diesen Trend)
Der Wechsel von zweilagigen zu dreilagigen
Transport stellt eine Effizienzsteigerung von ca.
50 % dar, da der Mehrverbrauch an Energie
minimal ist
Dreilagiger Transport wichtige stragetische
Notwendigkeit um konkurrenzfähig zu bleiben
Dreilagiger Transport inbesondere in den
kritischen Abschnitten erstmal nur
eingeschränkt möglich. Optimierte Pläne
können die Einschränkung vermindern.
Unvorhersehbare Wasserstände und zu wenig
Spielraum verhindern (noch!) “just-in-time
delivery” bei dreilagigem Transport in kritischen
Bereichen...
GOR, München 2005
23
Ausblick
Betrachtung in einem größeren Kontext (wichtig für Reedereien):
Nicht mehr nur eine Ladung und ein Schiff
Gegeben Anzahl von Container, verschiedene Schiffe (Schiffstypen, Due-Dates und
erwartete Wasserstände)
Aufteilen der Containermenge in optimale Ladungen mit Blick auf Due-Dates, Masse und
Höhe (Set Partition Problem)
Bestimmung von Ladeplänen für entsprechende Ladungs - Schiffs Kombinationen
Bestimmung der optimalen „Verschiffzeitpunkte“ unter Unsicherheit um die Anzahl der
Verspätungen zu minimieren (Stochastical Scheduling Problem)
Moving Horizont, d.h. es muss so geplant werden, dass auch neu ankommende Aufträge
sinnvoll in den Plan integriert werden können
22.04.2005
GOR, München 2005
24
Vielen Dank!
22.04.2005
GOR, München 2005
25