Kommutierende Operatoren
Werbung

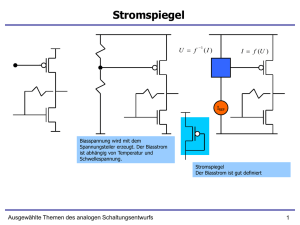
Klassische Mechanik Der Zustand eines Systems (z. B. eines Teilchens) wird mit den dynamischen Variablen (Koordinaten und Impulsen) beschrieben ( px , p y , pz ) ( x, y , z ) (q1 , q2 , q3 ) Die dynamischen Variablen können beliebig genau gemessen werden ohne das das System gestört wird Wenn die Anfangsbedingungen (dynamische Variablen in t = 0) und die Kräfte bekannt sind, ist es möglich die Bewegungsgleichungen zu lösen und die Zukunft (und die Vergangenheit) des Systems genau zu bestimmen. (mechanischer Determinismus/Kausalität) pi (0), qi (0) Gleichungen pi (t ), qi (t ) Die Kräfte sind bekannt Ausgewählte Themen des analogen Schaltungsentwurfs 1 Newtonsche Gleichung Newtonsche Gleichung mr F Kraft Differentialgleichung zweiter Ordnung, r(t) Unbekannte Funktion r xe x ye y ze z Beschleunigung mx f x , my f y , mz f z Potentielle Kraft U=mgx Potential F=mg U ( x, y, z, t ) U U fx , fy , fz x y z Konservative Kraft – Potentielle Energie ist Zeitunabhängig U U (t ) Ausgewählte Themen des analogen Schaltungsentwurfs v x U mgx dU fx mg dx 2 Kinetische Energie Kinetische Energie x(0)=0 U(0) x(dt)=dx U(dx) f 1 2 1 1 2 T mr mv m( x 2 y 2 z 2 ) 2 2 2 dT 1 d 2 1 d dT dt m ( x )dt m(2 x x )dt mxdtx mdxx dt 2 dt 2 dt Wegen der Newtonschen Gleichung mxdx f x dx dA dT dA Mechanische Arbeit der Kraft f auf dem Weg dx = Zuwachs der kinetischen Energie f x dx dU dx dU dx dT dU Mechanische Arbeit = - Änderung der potentiellen Energie Ausgewählte Themen des analogen Schaltungsentwurfs T U const E Summe der kinetischen und potentiellen Energie ist konstant 3 Lagrange - Funktion L T U Lagrange Funktion (nichtrelativistische klassische Mechanik) Potentielle Energie Kinetische Energie 1 2 L mr U 2 1 L m( x 2 y 2 z 2 ) U ( x, y, z ) 2 Ausgewählte Themen des analogen Schaltungsentwurfs 4 Generalisierte Koordinaten r xe x ye y ze z x x x(q1 ,..., qn ) x R sin y y(q1 ,..., qn ) y R cos z z (q1 ,..., qn ) r i φ y n <= 3 x y z qi e x qi e y qi e z qi q q i i i i Zwei gleiche Indizes fett geschrieben - Summe r x y z qi e x qi e y qi e z qi qi qi r R cos( ) e x R sin( ) e y L 1 m( ijqi q j ) U (q1 ,..., qn ) 2 L ij ji 1 mR 2 2 mgR cos 2 x x y y z z qi q j qi q j qi q j Ausgewählte Themen des analogen Schaltungsentwurfs 5 Wirkungsintegral und Hamiltonsches Prinzip qi qi (t ) qi qi (t ) Beliebige Zeitfunktion x(0)=0 f Der eigentliche Weg t0 w L(q1 ,..., qn , q1...qn )dt x(t0) = x0 0 Wirkungsintegral w 0 x0 x (t ) qi (t ) qi (t ) t0 Der Wirkungsintegral hat einen Extremwert wenn q dem eigentlichen Weg gleich ist Jede kleine Variation des q(t) ergibt in erster Ordnung δw = 0. Ausgewählte Themen des analogen Schaltungsentwurfs t0 1 2 w mx (mgx) dt 2 0 6 Lagrange Gleichungen L L w qi qi dt qi qi 0 t0 Wir variieren die q(t) t0 0 L L d (qi ) L d L qi dt q dt dt q i 0 qi i 0 qi dt qi dt qi 0 0 t0 t0 t δq(t0) = δq(0) = 0 t0 L w 0 qi d L qi dt dt qi d L L 0 dt qi qi q0 d L L 0 dt qi qi q (t ) t0 Lagrange Gleichungen Ausgewählte Themen des analogen Schaltungsentwurfs 7 Lagrange Gleichungen (Beispiel) d L L 0 dt qi qi L Lagrange Gleichungen φ 1 mR 2 2 mgR cos 2 d L L 0 dt R g sin 0 Ausgewählte Themen des analogen Schaltungsentwurfs 8 Hamiltonsche Gleichungen Lagrange-Gleichung - differentialgleichung zweiter Ordnung d L L 0 dt qi qi L pi qi L f (qi , qi , qi ) 0 Wir versuchen aus LG zwei Gleichungen erster Ordnung herzuleiten… f (qi , pi , qi ) 0 f ( p i , pi , qi ) 0 Kanonischer Impuls wird definiert 1 m( ijqi q j ) U (q1 ,..., qn ) 2 pi 1 1 m ijq j m ji q j m ijq j 2 2 qi f ( p1 ,..., pn ) L L( pi , qi ) Es ist möglich die Lagrange Funktion als Funktion von Impulsen und Koordinaten darzustellen L p i q i Hat die Form f ( p i , pi , qi ) 0 Ausgewählte Themen des analogen Schaltungsentwurfs Es fehlt noch… f (qi , pi , qi ) 0 9 Hamiltonsche Gleichungen (2) pi p i L L qi L q i Definition – Kanonischer Impuls f (qi , pi , qi ) 0 Wir leiten die zweite Gleichung her… Erste Gleichung L L qi qi qi qi L p iqi piqi Variieren wir Lagrange-Funktion piqi ( pi qi ) pi qi ( L pi qi ) p iqi qipi H pi qi L Wir definieren die Hamiltonsche Funktion p i H H , qi dqi dpi Hamiltonsche Gleichungen Ausgewählte Themen des analogen Schaltungsentwurfs 10 Physikalische Bedeutung der Hamiltonschen Funktion 1 L m( ijqi q j ) U (q1 ,..., qn ) 2 und L pi qi ergibt pi m ij q j Definition des Impulses H pi qi L Definition der Hamiltonschen Funktion pi qi m ijq jqi 2T Zweifache kinetische Energie H 2T (T U ) T U E Hamiltonsche Funktion stellt die Gesamtenergie des Systems dar Für die Kartesische Koordinaten gilt: q1 x, q2 y, q3 z Daraus folgt und ij ij Kanonische Impulse sind den gewöhnlichen Impulsen gleich p x mx , p y my , p z mz Ausgewählte Themen des analogen Schaltungsentwurfs 11 Poisson-Klammer u v u v u, v p i q i i q i p i Zwei Funktionen der Kanonischen Impulse und Koordinaten dF F F , H dt t Eine nicht explizit Zeitabhängige Funktion F dynamischer Variablen p und q ändert Ihren Wert nicht wenn [F, H] = 0 F ist dann eine Konstante der Bewegung (Erhaltungsgröße) H H (x) px , H 0 H , H 0 Gesamtenergie bleibt erhalten Impulskomponente bleibt erhalten wenn in dieser Richtung keine Kraft wirkt Ausgewählte Themen des analogen Schaltungsentwurfs 12 Lineare Vektoralgebra Vektoren Vektorraum Folgendes wird definiert: f ; , f , E Addition f ; , f E; C Multiplikation mit einer komplexen Zahl Addition ist kommutativ Assoziativgesetz, Distributivgesetz 1 f1 ... n f n 0 i 0 Linearunabhängige Vektoren (Definition) Ein Vektorraum mit nicht mehr als M linearunabhängigen Vektoren ist M-dimensional Ausgewählte Themen des analogen Schaltungsentwurfs 13 Vektoralgebra (Skalarprodukt) ( f , g) C Skalarprodukt (Innenprodukt) ist eine komplexe Zahl. Es gilt: ( f , g ) ( g , f )* ( f , g ) ( f , g ) (f , g ) * ( f , g ) ( f , f ) 2 , 2 , 2 0 λ = Norm ( f , f ) 1 Norm = 1, normierter Vektor ( f , g) 0 orthogonale Vektoren Ein Vektorraum mit definiertem Skalarprodukt definieren wir hier als Hilbert-Raum Ausgewählte Themen des analogen Schaltungsentwurfs 14 Darstellung des Vektors in einer Basis ex , e y , ez M Linearunabhängige Vektoren eines M-dimensionalen Raums bilden eine Basis f1 , ... , f M c1 f1 ... cM f M Jeder Vektor dieses Raums kann als lineare Kombination der Basisvektoren dargestellt werden ( f i , f j ) ij ; ii 1, i j 0 r xex ye y zez ei e j ij Eine orthonormale Basis Die Koeffizienten können wie folgend berechnet werden x ex r ci ( f i , ) Für einen normierten Vektor φ gilt ( , ) c1 ... cM 2 2 1 Ausgewählte Themen des analogen Schaltungsentwurfs x2 y2 z 2 1 15 Operator Operator Vektor Aˆ f g , f , g E Aˆ ( f g ) Aˆ f Aˆ g Operator (Abbildung) Linearer Operator Aˆ (f ) Aˆ f Zwei Operatoren sind nicht immer miteinander vertauschbar Aˆ Bˆ f Bˆ Aˆ f Aˆ Bˆ Bˆ Aˆ Aˆ , Bˆ Kommutator Ausgewählte Themen des analogen Schaltungsentwurfs 16 Hermitesche Operatoren und Eigenwert ( , Aˆ f ) ( Aˆ , f ) Aˆ Aˆ ist adjungiert von  ist selbstadjungiert (ähnlich wie hermitesch)  Aˆ f n an f n Eigenwert  Eigenwert Problem Eigenfunktion Die Menge aller Eigenwerte eines Operators bildet sein Spektrum Das Spektrum kann diskret oder kontinuierlich sein Wenn mehrere Eigenvektoren demselben Eigenwert entsprechen, dann ist dieser Eigenwert entartet Ausgewählte Themen des analogen Schaltungsentwurfs 17 Eigenschaften Hermitescher Operatoren Eigenwerte eines hermiteschen Operators sind reell Beweis: Aˆ f n an f n ( f n , Aˆ f n ) an ( f n , f n ) an Konjugation * an ( Aˆ f n , f n ) ( f n , Aˆ f n ) an Eigenfunktionen mit unterschiedlichen Eigenwerten sind orthogonal Beweis: Aˆ f n an f n Aˆ f m am f m ( f m , Aˆ f n ) an ( f m , f n ) ( f n , Aˆ f m ) am ( f n , f m ) Konjugation ( Aˆ f m , f n ) am ( f m , f n ) * am ist reell ( f m , Aˆ f n ) am ( f m , f n ) 0 (an am )( f m , f n ) 0 ( f m , f n ) Ausgewählte Themen des analogen Schaltungsentwurfs 18 Kommutierende Operatoren Einen Operator nennt man Observable wenn seine Eigenvektoren eine orthonormale Basis darstellen. Wenn zwei Operatoren kommutieren, haben sie wenigstens eine Menge gemeinsamer Eigenvektoren die eine Basis bilden Wenn zwei oder mehr Operatoren kommutieren und es gibt keinen weiteren Operator der mit ihnen kommutiert, bilden sie einen vollständigen Satz kommutierender Operatoren. Diese Operatoren haben eine eindeutige Menge gemeinsamer Eigenvektoren die eine Basis bildet. Die Angabe der Eigenwerte aller dieser Operatoren ausreicht, um (bis auf einen Faktor) eindeutig einen gemeinsamen Eigenvektor zu bestimmen. Ausgewählte Themen des analogen Schaltungsentwurfs 19 Darstellung in einer Basis und Operator Jede beliebige Form kann auf die Grundformen zerlegt werden Basisvektoren Grundformen = 5X + 4X + 1X Regel der Abbildung „A“ Mit 1 multiplizieren Mit 2 multiplizieren Mit 3 multiplizieren… A = 5X + 8X + 3X Der Operator A erkennt die Grundformen und ändert ihren Anteil Ausgewählte Themen des analogen Schaltungsentwurfs 20 Eigenwert So werden die Basisvektoren abgebildet: Basisvektoren (Grundformen) Eigenwert A A Eigenvektor 1 3 Regel der Abbildung „A“ Mit 1 multiplizieren Mit 2 multiplizieren Mit 3 multiplizieren… Ausgewählte Themen des analogen Schaltungsentwurfs 21 Kommutierende Operatoren Zur Darstellung von Formen in Farbe brauchen wir mehr Basisvektoren: A A A 1 1 Entartung des Eigenwerts „1-Viereck“ Die Angabe die Formen reicht nicht aus um einen Basisvektor zu definieren 1 Wir führen einen anderen Operator ein, der die Farben erkennt Der neue Operator B kommutiert mit dem Operator A und hat identische Eigenvektoren B B B Ausgewählte Themen des analogen Schaltungsentwurfs Blau Mit zwei Eigenwerten ist ein Basisvektor eindeutig definiert (1-Viereck, Blau) Rot Die zwei Operatoren bilden einen vollständigen Satz kommutierender Operatoren Gelb 22 Postulate der Quantenmechanik Zustand eines Teilchens (Systems) wird durch einen normierten Vektor aus dem Hilbert Raum aller Zustände beschrieben Wenn zwei Vektoren sich nur durch die Konstante eiφ (Phase) unterscheiden, stellen sie den gleichen Zustand dar. Falls ein System sich in den Zuständen f1 und f2 befinden kann, ist c1 f1 + c2 f2 auch ein möglicher Zustand dieses Systems Dirac Notation Ein Vektor fi Zustandsvektor BracKet fi ( f , g ) f g Jedem Ket Vektor fi entspricht ein Bra Vektor Ausgewählte Themen des analogen Schaltungsentwurfs fi 23 Dirac-Notation Dirac Notation ( f , g ) f g ( f , f ) (* f , f ) f * f Für hermitesche Operatoren gilt ( Aˆ f , g ) ( f , Aˆ g ) f Aˆ g Ausgewählte Themen des analogen Schaltungsentwurfs 24 Darstellung in Basis Darstellung des Vektors in einer Basis Mathematische Notation f1 , ... , f M Dasselbe in Dirac Notation Zerlegung mit Basisvektoren c1 f1 ... cM f M ( f i , f j ) ij ci ( f i , ) f1 , ... , f M c1 f1 ... cM f M Basisvektoren f i f j ij sind orthonormal ci f i Dann gilt… f1 f1 ... f M f M Iˆ f i fi Einheitsoperator i Ausgewählte Themen des analogen Schaltungsentwurfs 25 Darstellung in Basis r ( x, y , z ) c1 f1 ... cM f M Einheitsoperatoren Aˆ f i f i Aˆ f j f j i, j a11 a1M d1 cM 1 aMM d M  c*1 c* M c * 1 c * M Bra Vektor wird durch eine Spaltenmatrix dargestellt Ket Vektor wird durch eine Zeilenmatrix dargestellt c1 cM Matrix Form  a11 a1M cM 1 aMM Operator wird durch eine quadratische Matrix dargestellt Ausgewählte Themen des analogen Schaltungsentwurfs 26 Messgrößen und Observablen Jeder Messgröße (dynamischer Variable) ist ein Operator (Observable) zugeordnet. p, r pˆ , rˆ Zu klassischen Koordinaten und Impulsen sind Operatoren zugeordnet Klassische dynamische Variablen lassen sich als Funktionen von p und x darstellen F ( pi , xi ) F ( pˆ i , xˆi ) i ˆ ˆ F , H F , H Pissson Klammer Kommutator p , q i pˆ , qˆ i j p , q i j ij i j pˆ , qˆ i i j ij Ausgewählte Themen des analogen Schaltungsentwurfs 27 Messergebnisse und Eigenwerte Das Ergebnis der Messung einer dynamischen Variable ist ein Eigenwert der zugeordneten Observable. Aˆ ui ai ui Wenn die Observable diskretes Spektrum hat, geben die Messungen entsprechender Größe diskrete Werte. Die Wahrscheinlichkeit im Zustand ψ den Eigenwert ai zu messen W (ai ) ui 2 Die Eigenvektoren einer Observable bilden eine Basis. Deswegen kann man schreiben: c1 u1 ... cM uM Und es gilt: W (ai ) ui 2 ci Ausgewählte Themen des analogen Schaltungsentwurfs 2 Für einen Vektor mit Norm = 1 gilt: c1 ... cM 2 2 1 28 Reduzierung des Wellenpakets Aˆ ui ai ui Annahme: Ein System befindet sich in dem Zustand: ui Die Messung der Variable A gibt dann ganz sicher das Ergebnis ai Annahme: Das System befindet sich in dem Zustand Die Messung der Variable A gibt Ergebnis ai. Die Messung überführt das System in den neuen Zustand: ui ui Pˆ Pˆ Pˆ ui ui Projektor Ausgewählte Themen des analogen Schaltungsentwurfs 29 Reduzierung des Wellenpakets FormX Messergebnis Wahrscheinlichkeit dass eine Messung auf φ die FormX gibt W FormX Anfangszustand W 1 2 FormX FormX Durch die Messung wird der Zustand des Systems in einen Eigenzustand der Observable übeführt Ausgewählte Themen des analogen Schaltungsentwurfs Pˆ Pˆ 30 Kommutierende Observablen Zu den dynamischen Variablen A und B sind zwei Observablen zugeordnet Aˆ , Bˆ Wenn die Observablen kommutieren, gibt es wenigstens eine Basis gemeinsamer Eigenvektoren Aˆ am , bn i am am , bn Bˆ am , bn i bn am , bn Dann gibt es einen Zustand i i am , bn i Index i kennzeichnet die unterschiedlichen Basisvektoren im Fall von Entartung. Entartung ist ein Zeichen dafür dass es noch andere Operatoren gibt, die mit A und B kommutieren. A und B stellen keinen vollständigen Satz kommutierender Operatoren in welchem die Messung der Variable A immer das Ergebnis am und die Messung der Variable B immer das Ergebnis bn gibt. - Die Ergebnisse hängen von Reihenfolge der Messungen nicht ab - Die Observablen A und B sind kompatibel. Ausgewählte Themen des analogen Schaltungsentwurfs 31 Kommutierende Observablen Das Messergebnis ist im voraus bestimmt W 1 W 1 FormX, Rot Das System befindet sich in dem gemeinsamen Eigenzustand zweier kommutierenden Operatoren Die Messungen geben immer die gleichen Ergebnisse, „rot“ und „FormX“ Ausgewählte Themen des analogen Schaltungsentwurfs 32 Nichtkommutierende Observablen W FormX 2 W Rot FormX ,i 2 W FormY Rot , j 2 Die zwei Operatoren (Formund Farbenerkennung) kommutieren hier nicht. Sie haben keine gemeinsamen Eigenzustände. Jede Messung überführt das System in den Eigenzustand der (zu der Messgröße zugeordneten) Observable. Die Messergebisse können nicht präzise vorausgesagt werden. Wenn die Observablen nich kommutieren, haben sie keine gemeinsamen Eignvektoren. Die Variablen können nicht durch wiederholte Messungen genau bestimmt werden Ausgewählte Themen des analogen Schaltungsentwurfs 33 Schrödinger Gleichung Die Zeitentwicklung eines Systems wird durch die Schrödinger-Gleichung beschrieben d i (t ) Hˆ (t ) dt Partielle Differentialgleichung Hamiltonoperator ist eine Observable. Sie ist der Gesamtenergie des Systems zugeordnet. t Kennen den Zustand eines Systems in t = t0, dann können wir die Zeitenwicklung des Systems berechnen. QM Determinismus. Zeitenwicklung ist bestimmt wenn wir das System alleine lassen, d.h. keine Messungen auf dem System durchführen. Ausgewählte Themen des analogen Schaltungsentwurfs 34 Wellenfunktion Koordinate ist eine Observable. Deren Eigenvektoren bilden eine Basis. Für diskrete Eigenwerte gilt: 1) W(ai) – Wahrscheinlichkeit dass eine Messung einen bestimmten Wert ai gibt 2) I – Einheitsoperator 3) Vektoren sind Orthonormal (Die Norm=1) xˆ x0 x0 x0 Spektrum ist kontinuierlich W (ai ) ui 2 I (Einheitsoperator) Iˆ ui ui x x dx x x dx ui u j i , j W x i W ( x0 ) x0 Die entsprechende Formel im Fall des kontinuierlichen Spektrums W(x0) -Wahrscheinlichkeit dass sich Teilchen im Bereich (x0, x0 + dx) befindet. Die Norm ist mit Dirac‘scher Delta Funktion definiert 2 dx Iˆ x x dx x1 x2 ( x1 x2 ) Wir definieren die Wellenfunktion Wellenfunktion ist Ket Vektor in Koordinatendarstellung Wahrscheinlichkeit dass sich das Teilchen in der dx Umgebung von x befindet Ausgewählte Themen des analogen Schaltungsentwurfs 2 dx Wahrscheinlichkeit dass sich das Teilchen in der Umgebung von x befindet ( x) x * ( x) x W dx 2 35 Koordinatenoperator Finden wir den Koordinatenoperator in Koordinatendarstellung xˆ IˆxˆIˆ x1 x1 xˆ x2 x2 dx1dx 2 Matrixelement des Operators x in Koordinatendarstellung Es gilt auch: xˆ x x x Eigenwert-Gleichung x1 x2 ( x1 x2 ) Und: x * ( x), x2 ( x) Definition der Wellenfunktion x1 x1 xˆ x2 x2 dx1dx * ( x1 ) ( x1 x2 ) x2 ( x2 )dx1dx * ( x)x ( x)dx 2 2 Koordinatenoperator in Koordinatendarstellung Ausgewählte Themen des analogen Schaltungsentwurfs 36 Wellenfunktion und die Wahrscheinlichkeit Rechnen wir die Wahrscheinlichkeit aus dass sich das Teilchen irgendwo in gesamtem Raum befindet * ( x ) dx ( x) ( x)dx x x dx 1 2 Ändert sich diese Wahrscheinlichkeit wenn man Schrödinger Gleichung anwendet? i d (t ) Hˆ (t0 ) dt Schrödinger Gleichung und die Wahrscheinlichkeit Die Norm des Vektors ändert sich nicht. Wahrscheinlichkeit für Gesamtraum bleibt 1. Beweis d d d (t ) (t ) (t ) (t ) (t ) (t ) dt dt dt Schrödinger Gleichung für Ket Vektor Schrödinger Gleichung für Bra Vektor d i (t ) Hˆ (t0 ) dt d i (t ) Hˆ (t ) (t ) Hˆ dt d 1 (t ) (t ) (t ) Hˆ (t ) (t ) Hˆ (t ) 0 dt i Ausgewählte Themen des analogen Schaltungsentwurfs H ist hermitesch 37 Wichtige Operatoren in Koordinatendarstellung Es gilt Koordinatenoperator Impulsoperator H Koordinatendarstellung xˆ x pˆ x i pˆ , qˆ i i j ij x 1 2 2 2 ( p x p y p z ) U ( x, y , z , t ) 2m Klassisch Hamiltonfunktion/Operator 1 2 2 2 ˆ H ( pˆ x pˆ y pˆ z ) U ( xˆ , yˆ , zˆ, t ) 2m Quantenmechanisch 2 2 2 2 Hˆ ( 2 2 2 ) U ( x, y, z, t ) 2m x y z Quantenmechanisch Ausgewählte Themen des analogen Schaltungsentwurfs 38 Schrödinger Gleichung in Koordinatendarstellung Multiplizieren wir die beiden Seite der Gleichung mit dem unitären Operator (Die rechte Seite zweimal…). d i (t ) Hˆ (t ) dt Iˆ x x dx d ˆ x x (t ) x dx dx i x ( t ) x dx x H 1 2 2 1 1 2 dt d ˆ ( x , t ) ( x , t ) x dx dx i ( x , t ) x dx x x H 1 2 2 2 1 1 2 dt x1 x2 ( x1 x2 ) d ˆ i dt ( x, t ) x dx H ( x1 , t ) ( x1 , t ) x1 dx1 d i ( x, t ) Hˆ ( x, t ) ( x, t ) dt 2 2 2 2 Hˆ ( x, t ) ( 2 2 2 ) U ( x, y, z, t ) 2m x y z Schrödinger Gleichung in Koordinatendarstellung Ausgewählte Themen des analogen Schaltungsentwurfs Koordinaten und Zeit sind hier unabhängige Variablen. Es gilt nicht x=x(t) wie in klassischer Mechanik 39 Lösung der Schrödinger Gleichung 2 2 2 2 Hˆ ( 2 2 2 ) U ( x, y, z, t ) 2m x y z d i ( x, t ) Hˆ ( x, t ) dt Finden wir die Lösung für den Fall: U U (t ) Potentialenergie hängt nicht explizit von der Zeit ab Wir können die Raumkoordinaten und Zeit trennen ( x, t ) (t ) ( x) i ( x) d (t ) (t ) Hˆ ( x) dt / (t ) ( x) 1 d 1 ˆ i (t ) H ( x) (t ) dt ( x) Ausgewählte Themen des analogen Schaltungsentwurfs 40 Lösung der Schrödinger Gleichung i 1 d 1 ˆ (t ) H (r ) (t ) dt (r ) 1 d i (t ) En (t ) dt Die linke Seite hat nur Zeit als Variable, die rechte nur Koordinaten. Zeit und Raumkoordinaten sind in QM unabhängig. Beide Seiten sind daher Konstanten (En), sonst wären sie nicht immer und überall gleich. 1 ˆ En H ( x) ( x) Die Zeitabhängige Gleichung hat die einfache Lösung (t ) ce i t , n n En Hˆ n,i ( x) En n,i ( x) n,i ( x, t ) ceiE t / n,i ( x) Die koordinatenhängige Gleichung ist das Eigenwertproblem des Hamiltonoperators. Die Konstante En ist daher die Gesamtenergie des Systems. Index i kennzeichnet die unterschiedlichen Funktionen im Fall von Entartung. Entartung ist vorhanden wenn es andere Operatoren gibt die mit dem Hamiltonoperator kommutieren n Die Gesamtlösung hat die Form Ausgewählte Themen des analogen Schaltungsentwurfs 41 Zeitentwicklung eines Systems n,i ( x, t ) ceiE t / n,i ( x) n Hˆ n,i ( x) En n,i ( x) (1) Lösung der Schrödinger Gleichung Finden wir die Zeitentwicklung eines Systems im Zustand beschrieben mit der Wellenfunktion φ(x) in t=0 n ,i ( x ) sind die Eigenfunktionen der Hamiltonoperators in Koordinatendarstellung. Diese Funktionen bilden eine Basis. Deswegen gilt: ( x) cn ,i n ,i ( x) (2) n ,i In Dirac Notation: ( x) cn,i n,i ( x) x dx cn,i n,i n ,i n ,i Die Koeffizienten können wie folgend berechnet werden cn ,i n ,i * n ,i ( x) ( x)dx Durch Vergleich (2) mit (1) bekommen wir: ( x, t ) cn ,i e iE t / n ,i ( x) n n ,i Ausgewählte Themen des analogen Schaltungsentwurfs 42 Stationäre Zustände ( x, t ) cn,i e iE t / n ,i ( x) n 0 n ,i Messung der Koordinate Zeitenwicklung Betrag der Wellenfunktion ( x, t ) 1. Energiemessung E=E0 2 ( x, t ) e iE t / c0i 0,i ( x) 01 i 2. Energiemessung E=E0 Keine Zeitenwicklung ( x, t ) 2 c 0i 2 0 ,i ( x) Const (t ) i Ab der 1. Energiemessung befindet sich das System im Eigenzustand des Operators H. In dem Zustand ändert sich nur die Phase das Zustandsvektors. Das hat als Folgen: 1) alle physikalischen Eigenschaften des Systems bleiben konstant. 2) jede nachfolgende Energiemessung gibt immer dasselbe Ergebnis – den gleichen Eigenwert. Aus den Gründen nennt man die Eigenzustände des Hamiltonoperators stationäre Zustände Ausgewählte Themen des analogen Schaltungsentwurfs 43 Ein Test für Stabilität (Nyquist) AF ( D) AOL ( D) 1 T ( D) P( D) AOL ( D) Q( D) AF ( z ) T ( z) Verstärkung mit RK L( D) T ( D) M ( D) P( z ) 1 Q ( z ) 1 L( z ) M ( z) L( z ) M ( z) Die Voraussetzung: Q(z) und M(z) haben keine Wurzel mit dem positiven Reellteil Stabilitätsbedingung: Die Funktion im Nenner darf keine Wurzel in der positiven komplexen Halbebene haben 1 T ( z) Ausgewählte Themen des analogen Schaltungsentwurfs 44 Die komplexe Analyse f (z ) Eine Komplexe Funktion der komplexen Variable z Im f ( z ) f (a) Ableitung wird definiert ' f (a) lim z a za e z e x iy e x (cos y i sin y) z z ei Log ( z) log( z ) i f ( z )dz 0 Die Funktion ist Analytisch wenn die Ableitung immer gleich bleibt, egal von welcher Richtung sich z zum a nähert z a Re Einige Wichtige analytische Funktionen Cauchy‘sche Integralformel Definition, Nullstelle n-ter Ordnung 1 f ( z) f (a) dz 2i z a n! f ( z) (n) f (a) dz n 1 2i ( z a ) f ( z ) ( z a) n g ( z ), g (a) 0, Definition, Polstelle p-ter Ordnung h( z ) f ( z) , h(a) 0, p ( z a) Ausgewählte Themen des analogen Schaltungsentwurfs 45 Nullstellen und Polstellen e z e x iy e x (cos y i sin y) z z ei Log ( z) log( z ) i Einige Definitionen 1 f ( z) f (a) dz 2i z a Cauchy Nullstelle h( z ) f ( z) , h(a) 0, p ( z a) 1 f ' ( z) dz N P 2i f ( z ) N P 2 Das Integral ist die Phasenänderung der Funktion f(z) während der Integration auf Kontur Γ f ( z ) ( z a) n g ( z ), g (a) 0, Es folgt: 1 d Log ( f ( z )) dz N P 2i dz z2 z3 z1 f(z2) f(z1) f(z3) Polstelle Anzahl von Nullstellen – Anzahl von Polstellen der Funktion f(z) innerhalb Kontur Γ Ausgewählte Themen des analogen Schaltungsentwurfs Anzahl von Umdrehungen des Phasenvektors um 0 ist N-Z 46 Nullstellen und Polstellen 1 T ( z) 1 L( z ) M ( z ) L( z ) M ( z) M ( z) z3 z2 z1 1+T(z2) 1+T(z3) 1+T(z1) Die Phasenänderung der 1+T(z) für z auf dem Kreis ist 0 0 Ausgewählte Themen des analogen Schaltungsentwurfs 47 Nullstellen und Polstellen z2 z1 z2 T(z2) 1+T(z2) T(z1) z1 1+T(z1) -1 1+T(z) Ausgewählte Themen des analogen Schaltungsentwurfs T(z) 48 Nyquist‘scher Test z2 T(z2) z2 T(z1) T(z2) -1 z1 T(z1) z1 -1 Kreis um 0 mit R=1 Bei |T(iy0)|=1 darf die Phasenänderung T(iy0)-T(0) nicht weniger als -180 Grad sein Ausgewählte Themen des analogen Schaltungsentwurfs 49