2.2
Werbung

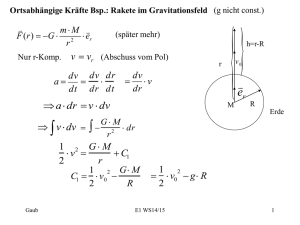
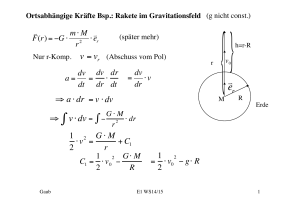
Ortsabhängige Kräfte Bsp.: Rakete im Gravitationsfeld (g nicht const.)
v
mM v
F (r ) G
er
2
r
Nur r-Komp.
a
(später mehr)
v v r (Abschuss vom Pol)
dv
dv
dr
dt
dr
dv
r
v
a dr v dv
v dv
1
v
2
GM
2
r
C1
Gaub
1
2
M
GM
r
2
v0
v
er
dr
dt
}{
2
R
Erde
dr
C1
v0
h=r-R
GM
R
1
2
E1 WS14/15
2
v0 g R
1
1
v
2
GM
2
r
1
2
2
v0 g R
M
mit a ( R ) g G
1
v
2
2
g R2
r
1
2
2
1 (
v0
}{
v0
v
er
v (rmax ) 0
v0 g R
2
R
rmax
v0 v2
R
r
M
für v 0
2
2Rg
h=r-R
R
Erde
2Rg
)
km
11
.2
2Rg
Fluchtgeschwindigkeit
(2.kosmische Geschwindigkeit)
s
Kleinste Kreisbahn (Newton) 1. Kosmische Geschwindigkeit
v1
2
R
Gaub
G M
v1
2
R
GM
R
g R
E1 WS14/15
v2
2
7.9
km
s
2
v
dp
v
d v dm v d m v
m
m
v
v 0
dt
dt
dt
dt
dt
Gesamtimpuls
(Rakete+Gas)
im All
Newtons Sicht:
Actio = Reactio!
v
m v
Gas
bezogen auf
Erdoberfläche
m
m0
Für t< T
T
t
m
v
dv
dt
dm
Viel Treibstoff
schnell verbrennen
Gaub
Raketengleichung
v
ve
dt
Triebwerks-Schub
dv v e
dv v
dm
e
Nur z-Richtung
m
m (t)
v(0)
Ausstoßgeschwindigkeit
relativ zur Rakete
v e v v const
v( t )
mT
0
0
dm d m
Rakete
m v
v
dv
m (0)
1
m
dm
v(t ) v e (ln m t ln m 0 )
v(t ) v e ln
E1 WS14/15
m0
mt
bei Start von
der Erde:
v(t ) v e ln
m0
mT
g t
3
Bsp.: 1. Stufe Saturn V
ve 4
km
s
}
m 0 3 10 kg
6
m T 1 10 kg
6
T 100 s
km
v(T ) 4, 4
s
g0
v(T ) 3, 4
km
s 2
g 9, 81 m / s
unterhalb der Fluchtgeschwindigkeit
Mehrstufige Trägerraketen
Apollo 11 Saturn V lauch
http://www.youtube.com/watch?v=wvWHnK2FiCk
Gaub
E1 WS14/15
4
§2.7 Energiesatz der Mechanik
v v
dW F d r
Arbeit + Leistung
Bahnkurve
p2
W 1 2
v v
d
r
v dt
z
P2
y
x
„Arbeit“[W]= Nm = Joule
v v
F dr
x2
v
v
Fx d x
x1
y2
v
v
Fy d y
y1
z2
v
v
Fz d z
z1
v v
Anmerkung: W = 0 für F d r
p1
v
r (t )
P1
v v
F dr
p1
p2
v
F
Linienintegral
Leistung:
P
dW
[P]=
F v
dt
v
v
Bsp. Gleichförmige Kreisbewegung: v v e t ;
J
=Watt=W
s
F F er
v v
F dr 0 W 0
Bsp.: Dehnarbeit einer Feder von 0 x :
W
x
Fx d x
D x d x
0
1
D x
2
2
Gaub
E1 WS14/15
5
Konservative Kraftfelder
P2
v
dr
I
z
P2
II
W II
P2
Wenn
y
v v
F dr
P1
P1
v v
F dr
P1
v
Fg
v
r (t )
WI
W I W II W III
=> Integral wegunabhängig
Kraftfeld
x
v
F (r )
konservativ
Konservatives Kraftfeld:
P2
W I W II
P2
P1
F dr
F dr
P1
F dr
P1
P2
P1
P2
I
II
II
I
F dr
v v
F dr 0
Die Arbeit hängt nur von Start- und Endpunkt, nicht vom Weg ab.
Vektoranalysis: Stokes´scher
Satz konservativ falls rot F 0
Gaub
E1 WS14/15
6
0
v
Fr 0
Fz
Bsp.: homogenes Kraftfeld
z
P2
z2
WI
P2
II
F dr
z2
0
P1
z1
x1
z
dz
z1
22
W II
I
P1
F
Fz dz 0
z1
x2
x
F dr 0
Konservatives Kraftfeld
v
Bsp.: zentrales Kraftfeld F f (r)
P2
P2
II
Gaub
Fr dr 0
Fr dr
r2
r1
konservativ
F dr 0
I
P1
F dr
P1
r1
r2
E1 WS14/15
7
Potentielle Energie
konservatives Kraftfeld
P2
W
v v
F dr
Def !
E p (P1 ) E p (P2 ) E p
P1
v
F
dr
Bemerkung:
I. Vorzeichen so gewählt, dass Arbeit, die am Körper am
Körper verrichtet wird, dessen E p erhöht
W P
v v
F dr
E p (P )
Arbeit die geleistet wird um P
ins Unendliche zu bringen
P
II. Nullpunkt wird oft so gewählt, dass
Gaub
E1 WS14/15
E p () 0
8
Bsp. Gravitationsfeld
Nahe Erdoberfläche g = const.
h
v
v
W F d r m g dz m g h E p (0 ) E p ( h )
0
mit
E p (0 ) 0
E p ( h) m g h
Geleistete Arbeit hat zur Zunahme der E p geführt
Für grösseren Entfernungsbereich gilt das Gravitationsgesetz
W
r
G M m v v
er d r
2
r
r
G M m
r
2
dr
G M m
r
E p (r ) E p ( )
Ep
R
m g R
Gaub
r
Ep
G M m
r
E1 WS14/15
9
Energiesatz der Mechanik
t
v
v
t
t
v
v v
dv
dv v
F m
F v d t m
v d t
dt
d t
t0
t0
konservatives Kraftfeld
P
v v
v v
F v d t F d r E p (P0 ) E p ( P ) W
P0
t 0
v1
v
t
m
m
2
2
dv v
v v
v
v
m
v d t m v d v
1
0
2
2
d
t
t0
v0
Def.:
E kin
m
v
2
2
E kin W
Die Zunahme der kinetischen Energie eines
Körpers ist gleich der an ihm geleisteten Arbeit
E E p (P0 ) E kin (P0 ) E p ( P ) E kin (P )
Im konservativen Kraftfeld ist die Summe aus
potentieller Energie und kinetischer Energie konstant
Gaub
E1 WS14/15
10
Bsp: freier Fall
v (h ) 0 ; z h ; E P (0 ) 0
z
E P (z )
m g dz
m g z
0
E kin (z )
m
2
v
2
m
2
(g t ) m g (h z )
2
weil 1 / 2 g t (h z )
2
E E P (z ) E kin ( z ) m g h Unabhängig von z!
Gaub
E1 WS14/15
11
v
F ( x x, y y)
Potential Kraftfeld
P
v
r
E P
E P ( x x , y y )
v
F ( x, y )
E P
x
x
E P
y
y
E P
z
z
y
Dafür benötigte Arbeit
P
E P ( x, y )
x
v v
W F d r E P
E P
E P
E P
F x x F y y Fz z
x
y
z
x
y
z
Def.: Potential = Potentielle Energie pro Masse
Bsp.: Gravitation
V ( r) G
ME
r
=> Schwerkraft
Gaub
F (r ) grad (V )m
E
P
Nabla
x
v
E P
grad ( E P ) E P
F
y
E P
z
E1 WS14/15
12
Bestimmung von G, Bsp: Gravitationswaage
= 2 L FG
Drehmoment des
verdrillten Fades
Schema Gravitationswaage
Gaub
E1 WS14/15
13
Drehimpuls
Ebene beliebig gekrümmte Bahn
v
L
v
v
r (t ), v (t )
O
v v
r (t 2 )
v
r (t )
vr
In Polarkoordinaten:
v
v v v
v v
v v
L m ( r ( v r v )) m ( r v r ) m ( r v )
v v
0 weil r v r
v
v
p m v
v
v
und
r
v
Ebene
von
weil
Kreisbewegung:
Gaub
Def.: Drehimpuls
v
v v
v v
L (r p ) m (r v )
v
v v
L r , v
v v
2
Ý
r v r
v
2
Ý
L m r
2
Ý ; v v L m r
E1 WS14/15
14
Drehmoment:
Newton
v
dL
v
v
d r
v v d p
v v
v vÝ
p r
(
v
p
)
(
r
p ) (r F )
dt
dt
dt
v v
0 weil v p
Def: Drehmoment
v
dL
dt
Für zentrale Kraftfelder
D
v
v v
D (r F )
.
v
r
v
F f (r ) eˆr
ist
v v
D0
.
v
F
v
L = const. bzgl. Kraftzentrum Drehimpulserhaltung
Zeitliche Veränderung
des Drehimpulses ist gleich dem wirkenden Drehmoment
Gaub
E1 WS14/15
15
v
L
Man Beachte:
O1
und
werden bzgl. eines festen Punktes O im Raum definiert
v
L1 0
v
v
m
v
D
Gerade Bewegung kann Drehimpuls
haben bzgl. O 2
v
r
L 2 m r v sin 0
O2
Analogie:
Später noch:
Gaub
v
rv
vv
Fv
p
m
E kin
v
v
v
D
v
L
I
E ro t
E1 WS14/15
16
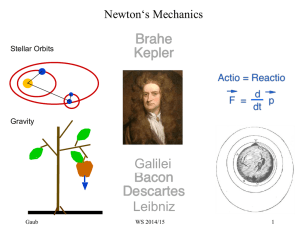
Johannes Keppler
Tycho Brahe
Gaub
E1 WS14/15
17
Planetenbewegung:
Kepplergesetze
(Basierend auf Beobachtung Tycho Brahes))
I. Planeten bewegen sich auf Ellipsen mit Sonne im Brennpunkt
II. Fahrstrahl von Sonne zu Planet überschreitet in gleichen Zeiten gleiche Flächen
P ( t1 )
P ( t2 t)
A1
A2
S
P ( t2 )
P ( t1 t )
III. Die Quadrate der Umlaufzeiten der Planeten verhalten sich wie die 3. Potenzen
ihrer großen Halbachsen
T1
T2
Gaub
2
2
a1
a2
3
3
oder
Ti
ai
2
3
const
E1 WS14/15
für alle Planeten
18
Zum 2. Kepplerschen Gesetz
v
r (t dt )
v v
d s v dt
h
dA
S
ds
v
r (t )
p
dA
dA
dt
1
2
1
2
Bogen ≈ Sehne
r v dt sin
r v sin
1
2m
v v
r p
1
2m
v
L
+ 1. Gesetz (planare Bahn) => Richtung L konst
v
L const
Gaub
E1 WS14/15
19
Newtons Analyse:
!!
Planetenbahnen
Selbe Axiomatik
Gravitation !
Fallender Apfel
aus
!!
v
FG (r ) f (r ) eˆ r
v
L const .
(Zentralkraft)
aus Actio = Reactio
FG ~ m 1 m 2
v
FG (r ) G m 1 m 2 f (r ) eˆr
2
Mit Ellipse ~ Kreis => m p w p rp G m p m s f (ri )
3. Keppler
2
w ~T
2
~r
f (r ) ~ r
3
2
mp M S
eˆr
F G
2
r
Newtonsches Gravitationsgesetz
G= 6,67384⋅10−11m3/kg⋅s2
Gaub
E1 WS14/15
20
Bestimmung von g: Mathematisches Pendel
Ft m a t
Ý
Ý
m g sin m l
sin
l
3
5
3!
5!
...
sin
l (1 cos )
Ft
Fr
Ý
Ý
g
l
mg
Lösung der DGL:
T 2
Gaub
g
(t ) A sin
E1 WS14/15
l
l
t
g
g
21
Genauer:
m
E kin
E p m g l (1 cos )
E E kin E p m g l (1 cos )
m
2
l
g
0
0
d
cos cos 0
T 4
T ( 0 ) 2
d
g
0
l
g
sin
1 k 2 sin 2
(1
1
16
; k sin
2
0 .....)
2 g (cos cos 0 )
l
+ Bronstein oder
Mathematica
2
mit sin
d
2
sin
T
Start
dt
4
0
l
dt
2
2
Ý2
l
2
2
l Ý E p 0 m g l (1 cos 0 )
4
v
2
T
m
2
0
2
T ( 0 )
0
T0
2
1.02
1.01
1.00
10
Gaub
E1 WS14/15
20 30
0
22
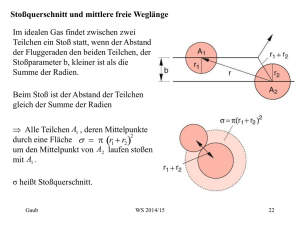
Kreisscheibe der Dicke dx schneidet aus der Kugelschale
der Dicke da das Volumenelement (Kreisring)
Gravitation Kugelschale
da
a
r
y
m
{
P
R
ds
X
dA
ds
dx
dx
dA = y dds
2
dV= y dds dx
ds
y d
x
Aufsicht
Schnittfläche
Gaub
y = a sin,
ds = da / sin
dE P G
m dV
r
dV KR y ds dx
d
0
2 y ds dx
Nebenüberlegung: Kreisring in n Segmente dV unterteilen
und Beiträge zu Ep
aufaddieren:
m dm KR
m dV
dE PKR dE P n G
G
r
r
n
E1 WS14/15
23
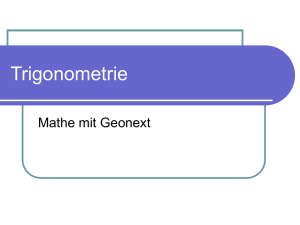
Kreisscheibe der Dicke dx schneidet aus der Kugelschale
der Dicke da das Volumenelement (Kreisring)
Gravitation Kugelschale
da
a
y
dV = 2 y ds dx,
y = asin,ds=da/sin
r
m
{
P
R
dm 2 a da dx
m dm
dE P G
r a
ds
E P 2 G m a da
dx
r y (R x)
2
2
a
2
2
2
a R 2Rx
2
2
Gaub
m m
R
mit m 4 a 2 da
r
Ra
2 a da m
EP
G dr
R
r R a
E P G
dx / dr r / R
dx / r dr / R
dx
x a
2
y x R 2Rx
14 2 43
2
dV = 2 a dx da
X
E1 WS14/15
= Masse der KS
24
Außerhalb der Hohlkugel erscheint die gesamte Masse konzentriert in O
EP
R
a
0
Innerhalb Hohlkugel:
G
m m
G
m m
R
a
R innerhalb der Kugel!
r a R
F
a
0
E Pi ~
R
r a R
E Pi G
F 0
F G
dr 2 R
m m
m m
R
2
v
F gradE
const. R a !
a
P
0
für R < a
Gaub
E1 WS14/15
25
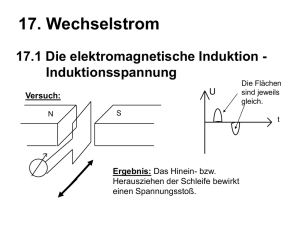
Gravimetrie der Erdoberfläche
1 Gal = 1 cm/s² = 0,01 m/s²; also etwa ein Promille der durchschnittlichen Erdbeschleunigung
von ca. 9,81 m/s² ≈ 10 m/s² = 1000 Gal,
Gaub
E1 WS14/15
26
Varianten der Coulomb WW
Gaub
E1 WS14/15
27
Varianten der Coulomb WW
Siehe J.N. Israelachvili, Intermolecular and Surface Forces with Applications to Colloidal and
Biological Systems, Academic Press 1985
Gaub
E1 WS14/15
28
Bsp.: VdW-Potentiale ausgedehnter Körper
B
A
dw n B
2 ydyd
( d )
2
y
2
y
d
A
A
A
B
d
B
M
3
B
r
dy
w AB
n B
dw
6d
y 0 0
d
3
3
WAB~ 1/d
a)
b)
WAB~ 1/d
Nochmalige Integration
=> Potetial zwischen 2 Wänden
a
W AB
2nA nB 1
12
d
2
HAB typisch ≈10-20 J
Hamaker
Konstante
Gaub
H AB 1
12 d
L
d
R
d
2
WAB~ 1/d
E1c)WS14/15
5
d)
WAB~ 1/d
29
2
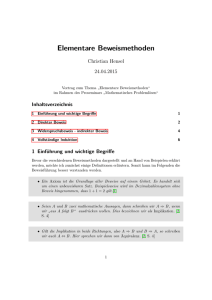
Van der Waals Wechselwirkung hält den Gecko am Glas fest
Gaub
E1 WS14/15
30