4. Energie, Arbeit, Leistung
Werbung

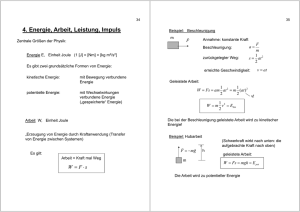
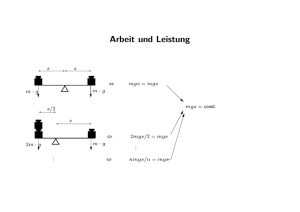
42 4. Energie, Arbeit, Leistung 43 Beispiel: Beschleunigung F m Zentrale Größen der Physik: Annahme: konstante Kraft Beschleunigung: Energie E, Einheit Joule (1 [J] = [Nm] = [kg m/s2] zurückgelegter Weg: Es gibt zwei grundsätzliche Formen von Energie: kinetische Energie: mit Bewegung verbundene Energie 1 2 Geleistete Arbeit: „Erzeugung von Energie durch Kraftanwendung (Transfer von Energie zwischen Systemen) Es gilt: Arbeit = Kraft mal Weg W = F ⋅s genauer: 1 1 W = Fs = am at 2 = m (at ) 2 2 2 mit Wechselwirkungen verbundene Energie („gespeicherte“ Energie) Arbeit W, Einheit Joule W = ∫ Fds v = at erreichte Geschwindigkeit: ( Ekin = mv ) 2 potentielle Energie: F m 1 s = at 2 2 a= v! 1 W = m v 2 = Ekin 2 Die bei der Beschleunigung geleistete Arbeit wird zu kinetischer Energie! Beispiel: Hubarbeit F = − mg m (Schwerkraft wirkt nach unten: die aufgebrachte Kraft nach oben) h geleistete Arbeit: W = Fs = mgh = E pot Die Arbeit wird zu potentieller Energie 44 Beispiel: Spannen einer Feder x 45 Gleiche Arbeit! Die Potentielle Energie hängt nicht davon ab, wie sie erzeugt wurde! Kraft einer Feder (Hook‘sches Gesetz) F = − Dx l Allgemein: W = F ⋅s geleistete Arbeit: l ∫ ∫ (für geraden Weg und konstante Kraft) r l 1 W = Fdx = ( Dx)dx = D l 2 = E pot 2 0 0 Vektorielle Beschreibung genauer: W = F ( r ) ds ∫ = r0 i Arbeit wird zu potentieller Energie 4.1 Wegunabhängigkeit der pot. Energie Beispiel: schiefe Ebene m Arbeit: direktes Heben W = mgh = E pot F Arbeit: über Rampe F l α F⊥ h W = Fs = mg sin α l h = mg sin α = mgh sin α ∑ Fi ∆si (für gerade Teilstücken) Beispiel: Hubarbeit im Schwerefeld (ortsunabhängige Kraft) 0 ∆x n i W = ∑ F∆si =∑ 0 ∆yi i =1 i =1 mg ∆zi n = n ∑ mg∆z i =1 i =mg n ∑ ∆z i = mgh i =1 Eine Bewegung in x- oder y-Richtung spielt keine Rolle; es zählt nur die Bewegung in Richtung der Kraft. 46 r1 Bedeutung von W = ∫ F ( r ) ds : Linienintegral 47 Bemerkung: das Kraftfeld ist der negative Gradient der potentiellen Energie r0 F r1 Weg F r0 Im Schwerefeld: ds ds r1 F ds = r0 Kraftfeld F (r ) = −∇E pot an jedem Ort Skalarprodukt r1 r0 = F ⋅ ds 0 dx 0 dy mg dz r1 ∂ E pot ∂x ∂ E =− ∂y pot ∂ E pot ∂z Ein so gebildetes Kraftfeld ist immer konservativ! Beispiel: Schwerefeld mgdz = mg∆z 0 F = −∇E pot = −∇(mgz ) = 0 − mg r0 Arbeit hängt nur vom Höhenunterschied ab! Für ein nichtkonservatives Kraftfeld gilt: Definition: Ein Kraftfeld, bei dem das Integral r ∫ F ( r ) ds r0 × F = ∇ Es gilt: nur von Anfangs- und Endpunkt, aber nicht vom Weg abhängt, heißt konservativ. ∂ ∂x ∂ ∂y ∂ ∂z × F = ∂Fy ∂z ∂Fx ∂z ∂Fy ∂x − − − ∂Fz ∂y ∂Fz ∂x ∂Fx ∂y = 0 ∇ × (∇ φ ) = 0 ⇒ ein als Gradient eines Skalarfelds gebildetes Kraftfeld ist immer konservativ! 48 Definition: Potential V (r ) = E pot (r ) r Damit also V (r ) = ∫ − Fs ( r ) ds 49 4.2 Energieerhaltung Für ein abgeschlossenes System gilt: Ekin + Epot = konstant r0 im System wirkende Kraft Da r0 frei wählbar ist, ist das Potential nur bis auf eine additive Konstante definiert. Es gilt damit: Fs (r ) = −∇V (r ) Die Summe der kinetischen und der potentiellen Energie ist konstant; sie ändert sich nur, wenn Arbeit am System verrichtet wird. Aber: potentielle Energie kann in kinetische Energie umgewandelt werden und umgekehrt Beispiel: freier Fall nachher: vorher: h Die Kraft ist der negative Gradient des Potentials. m h m Eigenschaften: der Gradient zeigt in die Richtung maximaler positiver Steigung; er steht senkrecht auf den Äquipotentiallinien bzw. –flächen. ⇒ die Kraft zeigt in die Richtung maximaler negativer Steigung des Potentials („bergab“) E pot = mgh E pot = 0 m Ekin = v 2 2 Ekin = 0 Mit der Energieerhaltung folgt: und damit: mgh = v = 2 gh m 2 v 2 v 50 nachrechnen: 51 Körper am äußeren Umkehrpunkt: zeitabhängige Höhe beim Fall Zeit beim Erreichen von z=0 Geschwindigkeit hier 1 z (t ) = h − gt 2 2 2h t= g 1 2 Ekin = mvmin =0 2 kinetische Energie ist minimal 1 2 1 E pot = Dxmax = Dx02 2 2 potentielle Energie ist maximal v = gt = 2 gh Wegen der Energieerhaltung gilt damit: Gleiches Ergebnis! 1 1 2 m( x0ω ) 2 = Dx0 2 2 Beispiel: harmonische Schwingung m mω 2 = D x(t ) = x0 cos ωt ω= v (t ) = x0ω sin ωt D m Schwingungsfrequenz Federpendel x Ständiges Umwandeln von potentieller in kinetische Energie und umgekehrt. Andere Herleitung: es ist Körper in der Mitte: kinetische Energie ist maximal potentielle Energie ist minimal 1 2 m Ekin = mvmax = ( x0ω ) 2 2 2 1 2 E pot = Dxmin =0 2 also Es gilt das heißt also a (t ) = − x0ω 2 cos ωt a = −ω 2 x (t ) F = ma − Dx = −mω 2 x ω= D m 52 4.3 Leistung 53 4.4 Dissipation: Reibung Leistung ist Arbeit pro Zeit Einheit Watt Die vollständige Umwandlung von Arbeit an einem Körper in kinetische und potentielle Energie des Körpers [W] = [J/s]=[Nm/s] P= W t dW P= dt genauer: Geleistete Arbeit ist W = ∆Ekin + ∆E pot bzw. die Energieerhaltung, wenn keine Arbeit geleistet wird Ekin + E pot = konstant gilt nur bei Abwesenheit disspativer Effekte (Reibung) Es folgen Beispiele für Reibung. W = Pt 4.4.1. Coulomb-Reibung (Oberflächen-Reibung) t bzw. W = ∫ Pdt FR v m 0 Beispiel: Hubarbeit 10 kg werden um 10 m angehoben W = mgh ≈ 1000 J W 1000 J geleistet in 5 min (300s): P= = = 3.3W t 300s 1000 J geleistet in 10 s: P= = 100W 10s F⊥ Klotz bewegt sich mit Geschwindigkeit v parallel zur Oberfläche. Für die Reibungskraft gilt: v FR = µ F⊥ (− ) v Gleitreibung Arbeit: Reibungskoeffizient Anpresskraft Richtung der Bewegung entgegengesetzt 54 Folgerungen: Ausnahme: Körper ruht: - Kraft ist unabhängig von der Geschwindigkeit - Kraft ist unabhängig von der Auflagefläche - Stärke wird nur bestimmt durch Anpresskraft und Materialkombination Fa FR = µ ' F⊥ ( − ) Fa Stahl auf Stahl (poliert) Typische Werte: Gummi auf Asphalt µ ' ≈ 0.7 µ ≈ 0.4 µ ' ≈ 1.2 µ ≈ 1.0 Mikroskopisch sind Flächen nie glatt. Jedes Material verformt sich ab einem kritischen Druck pkrit. ⇒ an den Berührpunkten verformen sich die Spitzen, bis der kritische Druck unterschritten wird: Fläche A F⊥ Berührpunkte (Kontaktfläche A*) ⇒ trocken naß Beispiel: maximal mögliches Beschleunigen eines Autos Drehende Räder können maximal die Haftreibungskraft auf die Straße ausüben, blockierende Räder die Gleitreibungskraft. Die maximal mögliche (positive oder negative!) Beschleunigung ist damit: bzw. Warum ist die Reibung unabhängig von der Auflagefläche A? Haftreibung µ ' ≈ 0.6 µ ≈ 0.4 a= 55 FR µF⊥ µ mg = = = µg m m m F' a' = R = µ ' g m Ein Fahrzeug mit Gummireifen kann auf Asphalt also mit maximal 1.2 g beschleunigen! pkrit = F⊥ A* A* = F⊥ pkrit Die tatsächliche Kontaktfläche ist für eine gegebene Andruckkraft immer gleich, und unabhängig von der Fläche A! ⇒ die Reibungskraft ist unabhängig von A 4.4.2. Newton-Reibung FR v Schneller Körper in leichter Flüssigkeit oder Gas Hier gilt für die Reibungskraft: 1 v 2 F = cW ρ Av (− ) 2 v v Geschwindigkeit cW Widerstandsbeiwert des Körpers A Querschnittsfläche des Körpers (senkrecht zur Geschwindigkeit) 56 Die Kraft ist proportional zum Quadrat der Geschwindigkeit! 57 dW = Fds = Fvdt = dE geleistete Arbeit Bei der Bewegung aufgebrachte Leistung: ⇒ P= Fs 1 = Fv = cW ρ Av 3 t 2 Beispiel: Auto A = 2.5 m2 ρ = 1.29 kg/m3 (Luft) cW = 0.3 v = 100 km/h (27.8 m/s) : F = 374 N P = 10393 W ( = 14 PS) v = 200 km/h (56 m/s) : F = 1495 N P = 83146 W ( = 113 PS) Anahme: ein Körper beschleunigt alles Gas in seiner Bahn auf seine Geschwindigkeit. Im Zeitintervall dt ist: durchstrichenes Volumen beschleunigte Gasmasse erzeugte kinetische Energie Nicht alles Gas wird beschleunigt; wird durch Faktor cw berücksichtigt. Unter Anwesenheit von Reibung wird ein Teil der geleisteten Arbeit in Wärmeenergie umgewandelt: W = ∆Ekin + ∆E pot + ∆EW Definition: Wärmeenergie ist die Differenz zwischen tatsächlicher und minimal möglicher mittlerer potentieller und kinetischer Energie der Atome eines Systems Ebenso kann kinetische Energie direkt in Wärmeenergie umgewandelt werden Herleitung Newton-Reibung zurückgelegte Strecke 1 F = ρ Av 2 2 Kraft ds = vdt dV = Ads = Avdt dM = ρ dV = ρ Avdt 1 1 dE = v 2 dM = v 2 ρ Avdt 2 2 −∆Ekin = ∆EW ⇒ es gilt eine erweiterte Energieerhaltung Ekin + E pot + EW = konstant Beispiel: Klotz auf Ebene m Fa Klotz ruht am Ende:gesamte Arbeit wird in Wärmeenergie umgewandelt W = Fl = µ mgl = ∆EW 58 59 4.5 Impuls F = ma dv a= dt mit Weitere zentrale Größe! mit Herleitung aus Reaktionsprinzip (hier für zwei Körper) m1 F1 F2 m2 actio = reactio F2 = − F1 Die Kräfte führen zur Beschleunigung beider Körper; die gesamte kinetische Energie wächst kontinuierlich Die an jedem Körper pro Zeitintervall verrichtete Arbeit ist dWi dEkin ,i = vi Fi = dt dt mit vi Fi : dEkin ,i = vi Fi dt Zunahme der gesamten kinetischen Energie: dEkin = v1 F1 + v2 F2 dt also m2 a2 = − m1a1 v2 v1 m2 = −m1 dt dt d (m1v1 + m2 v2 ) = 0 dt bleibt konstant! m1v1 + m2 v2 Definition: p = mv Impuls: ⇒ die Summe der Impulse beider Körper bleibt konstant! Für einen einzelnen Körper gilt: t t F (t ) v (t ) = v0 + ∫ a (t )dt = v0 + ∫ dt m 0 0 Mutipliziert mit m: t p(t ) = p0 + ∫ F (t )dt 0 Aber es gibt eine Erhaltungsgröße: Es gilt F2 = − F1 Bei konstanter Kraft und p0 = 0 p = F ⋅t Impuls ist Kraft mal Zeit! 60 4.7 Stöße 4.6 Impulserhaltung actio = reactio gilt auch für ein System aus beliebig vielen Körpern: m1 m2 F1 F 3 F2 F6 m3 Stoß: Austausch von Impuls und Energie zwischen Körpern in endlichen Zeitintervallen; keine Wechselwirkung im Anfangs- und Endzustand. Anfangszustand m4 F5 61 ∑ Fi = 0 N F4 i =1 p1 , p2 , p3 ... Endzustand p '1 , p'2 , p '3 ... Wechselwirkung E1 , E2 , E3 ... E '1 , E '2 , E '3 ... m5 Es gilt: m6 ∑ p =∑ p ' i Für die Summe der Impulse gilt: t t N N 0 0 N ∑ pi = ∑ ( pi + ∫ Fi dt ) = ∑ pi + ∑ ∫ Fi dt Impulserhaltung i N i =1 i =1 t0 i =1 t N = pges + ∫ ∑ Fi dt t0 i =1 = pges elastischer Stoß: i =1 t0 Dann gilt keine Umwandlung von kinetischer Energie in potentielle oder Wärmeenergie (keine Anregung „innerer Freiheitsgrade“ der Körper) ∑E kin i =∑ E kin 'i Energieerhaltung =0 In einem System, auf das keine äußeren Kräfte wirken, ist der Gesamtimpuls eine Erhaltungsgröße 4.7.1 Zentraler elastischer Stoß zwischen zwei Körpern Zentraler Stoß: gesamte Bewegung findet auf einer Geraden statt m1 v1 v2 m2 62 Impulserhaltung: m1v1 + m2v2 = m1v '1 + m2v '2 eindim. Bewegung: m1v1 + m2v2 = m1v '1 + m2v '2 63 ⇔ m22 + m1m2 2 v1v'2 = v '2 2m1 ⇔ v'22 = kin. Energieerhaltung: 1 1 1 1 m1v12 + m1v2 2 = m1v '12 + m2v '2 2 2 2 2 2 Für diese Gleichung gibt es zwei Lösungen: Lösung 1: Zwei Gleichungen, zwei Unbekannte (v‘1, v‘2) Dann gilt: Lösung 2: Einsetzen: ⇔ ⇒ v '1 = v1 − m2 v '2 m1 1 1 2 2 1 2 m1v1 = m1v'1 + m2 v '2 2 2 2 und ⇔ m1v1 = m1v '1 + m2v '2 v '2 = 0 v'1 = v1 („Triviale“ Lösung: Stoß hat nicht stattgefunden) ⇒ eindeutige Lösung für gegebene Parameter m1, v1, m2, v2 (unabhängig von der Art der Wechselwirkung!) Beispiel: zweiter Körper ruht (v2 = 0) 2m1 v1v'2 m1 + m2 1 2m1 v1 m1 + m2 m m − m2 v'1 = v1 − 2 v'2 = 1 v1 m1 m1 + m2 v '2 = Diskussion dieses Resultats für verschiedene Fälle: 2 1 1 1 m m1v12 = m1 v1 − 2 v '2 + m2v '2 2 2 2 m1 2 1 1 m 2m m m2 1 m1v12 = m1v12 − 1 2 v1v '2 + 1 22 v '22 + m2v '2 2 2 2 2 m1 2 m1 2 m22 2 1 0 = −m2v1v '2 + v '2 + m2v '2 2 2m1 2 1. m1 = m2 hier gilt: v'2 = v1 v'1 = 0 Der Impuls (und die kinetische Energie) werden vollständig auf den gestoßenen Körper übertragen. 64 2. m1 << m2 hier gilt: 2m v'2 ≈ 1 v1 m2 v'1 ≈ −v1 ( p '2 ≈ 2 p1 !) 65 3. m1 >> m2 hier gilt: Der stoßende Körper wird kaum verlangsamt; der gestoßene Körper erhält die doppelte Geschwindigkeit des stoßenden Körpers! v'2 ≈ 2v1 v'1 ≈ v1 Allgemein: dreidimensionaler Stoß Der stoßende Körper wird kaum verlangsamt; der gestoßene Körper erhält die doppelte Geschwindigkeit des stoßenden Körpers! m1 Effizienz der Energieübertragung: Hier gilt: 2 m 2m1 2 1 E '2 = m2 v '2 2 = 2 v1 2 2 m1 + m2 m2 4m12 4m1m2 m1 2 = v2 = v1 2 1 2 (m1 + m2 ) (m1 + m2 ) 2 2 E2 ' = v'2 ≈ 2v1 v'1 ≈ v1 Der stoßende Körper wird reflektiert; der gestoßene Körper erhält den doppelten Impuls des stoßenden Körpers! 3. m1 >> m2 hier gilt: 4m1m2 E1 (m1 + m2 ) 2 Maximal für m1 = m2 ! (hier ist E2‘ = E1) Für m1≠ m2 ist E2‘ < E1; der gestoßene Körper erhält nur einen Teil der Energie des stoßenden Körpers. v1 v2 m2 m1v1 + m2 v2 = m1v '1 + m2 v '2 Impulserhaltung 1 2 1 2 1 2 1 2 m1 v1 + m2 v2 = m1 v '1 + m2 v '2 2 2 2 2 Energieerhaltung Dies sind 4 Gleichungen mit 6 Unbekannten ( v '1 , v '2 ) ⇒ Lösung bestimmt bis auf zwei freie Parameter! (z.B. legt die Wahl der Richtung von fest) v1 alle anderen Werte 66 67 Jetzt: Rakete 4.7.3 Anwendung der Impulserhaltung: Rakete vw m1 v '2 m2 m1 Person in Boot in Ruhe wirft eine Kugel mit Wurfgeschwindigkeit vw (Geschwindigkeit relativ zur Person) Dadurch erhält das Boot (und die Person) einen Impuls bzw. eine Geschwindigkeit in Gegenrichtung Es gilt: v '1 + v '2 = vW Impulserhaltung: m1v '1 = m2 v '2 v m vD Vortrieb durch Wurf: m2 v '1 heiße Gase In der Zeit dt wird die Masse dmGas mit Geschwindigkeit vDausgestoßen. Ausstoß führt zur Abnahme der Raketenmasse: Brennkammer und Düse Treibstoff dmGas = - dmR Geschwindigkeitsänderung der Rakete dadurch (dmR << mR) : dv = dmGas dm vD = − R v D mR mR Umformen: v dv =− D dm m Integration über m: m m1v '1 = m2 (vW − v '1 ) also ⇒ Für m1 << m2 wird dies zu: v '1 = m2 vW m1 + m2 v '2 = m1 vW m1 + m2 v '1 ≈ vW und ∫ m0 ⇒ m dv 1 dm = − vD dm dm m m ∫ 0 v(m0 ) − v(m) = −vD (ln(m) − ln(m0 )) = vD ln( m0 ) m Falls v(m0) = 0 ist (Startgeschwindigkeit Null): v '2 ≈ m1 vW m2 v = vD ln( m0 ) m Raketengeschwindigkeit Ausstoß von Masse erzeugt Vortrieb! Gasgeschw. Verhältnis Start- zu Endmasse 68 Die von einer Rakete erreichbare Geschwindigkeit hängt von dem Verhältnis der Start- und Endmasse und der Gasgeschwindigkeit ab. vD = 2000 nachher: m s vEnd ≈ 3600 ms Damit: „Reibungseffekte“ (Umwandlung kinetischer Energie in Wärmeenergie) verändern Stöße. m2 m1 ⇔ ⇔ v '1 = v '2 Kugeln bleiben zusammen Dämpfer Es gilt: m2 Pges = P ' ges Impulserhaltung (gilt immer!) m1v1 = m1v '1 + m2 v '2 = (m1 + m2 )v '1 v '1 = m1 v1 m1 + m2 m1 Ekin m1 + m2 Die kinetische Energie wird verringert ! Die „fehlende Energie wird in Wärmeenergie verwandelt: Beispiel: vollinelastischer zentraler Stoß v1 E 'kin 1 Ekin = m1v12 2 1 1 1 = m1v '12 + m2 v '22 = (m1 + m2 )v '12 2 2 2 m1 1 m12 v12 = Ekin = 2 m1 + m2 m1 + m2 E 'kin = 4.7.4 Inelastischer Stoß m1 Für die kinetische Energie gilt: vorher: m0 =6 m Typische Werte: 69 Vollinelastischer Stoß E 'W = EW + Ekin − E 'kin = EW + m2 Ekin m1 + m2 Merke: bei inelastischen Prozessen gilt Impulserhaltung, aber nicht die Erhaltung der kinetischen Energie! (sondern nur die Erhaltung der Gesamtenergie) 70 4.7.4 Stöße in 3D 4.8 Schwerpunkt Stoß zwischen zwei Körpern mit beliebigen Geschwindigkeiten m1 Hier gilt: 71 v1 v2 Definition:Schwerpunktskoordinate eines Systems aus N Massenpunkten N m2 rs = m1v1 + m2 v2 = m1v '1 + m2 v '2 Schwerpunkt: „Gewichtetes Mittel der Ortskoordinaten“ i i i =1 N ∑m i i =1 Impulserhaltung (3 Gleichungen!) ∑m r Bewegung des Schwerpunkts: N Bei einem elastischen Stoß: rɺɺs = 1 2 1 2 1 2 1 2 m1 v1 + m2 v2 = m1 v '1 + m2 v '2 2 2 2 2 ∑ m rɺɺ i i i =1 N = ∑m i i =1 ∑m a ∑ (F + F N i =1 N 1 i i =1 i ) i äußere Kräfte Energieerhaltung (1 Gleichung) Dies sind 4 Gleichungen mit 6 Unbekannten ( beiden Vektoren haben je 3 Komponenten) v '1 , v '2 N mit i =1 ; die ∑F i =0 (Reaktionsprinzip) N und den Bezeichnungen i =1 ⇒ Lösung bestimmt bis auf zwei freie Parameter! (z.B. legt die Wahl der Richtung von fest) v1 ' a ∑F i N ∑m i =1 alle anderen Werte gilt also: a ɺɺ Fges rs = M i a =Fges gesamte äußere Kraft =M Gesamtmasse Der Schwerpunkt bewegt sich wie ein Massenpunkt mit der Gesamtmasse des Systems, an dem sämtliche Kräfte angreifen! 72 Folgerung: ohne äußere Kräfte ändert der Schwerpunkt eines Systems seinen Bewgungszustand nicht! 73 Für die kinetische Energie im Schwerpunktsystem gilt: N E 4.9 Schwerpunktsystem vs = rɺs = i =1 N i i ∑m i =1 = 1 M N ∑m v i =1 1 ges = Ekin − vs Mvs + M vs 2 1 2 ges = Ekin − M vs 2 i i i Galilei-Transformation in das Schwerpunktsystem: 2 2 1 2 ges s Ekin = M vs + Ekin 2 Umgeformt: ri s = ri − rs vis = vi − vs 2 N mi 2 N mi m vi − ∑ 2vi vs + ∑ i vs i =1 2 i =1 2 i =1 2 N N 1 2 ges = Ekin − vs ∑ mi vi + vs ∑ mi 2 i =1 i =1 =∑ Geschwindigkeit des Schwerpunkts: ∑ m rɺ mi s 2 N mi = ∑ vi = ∑ vi − vs i =1 2 i =1 2 N Das Schwerpunktsystem ist ein Koordinatensystem, dessen Ursprung der Schwerpunkt des Systems ist. N s kin Relativkoordinaten! kin. Energie aller Körper kin. Energie „des Schwerpkts.“ „innere“ kin. Energie des Systems Für den Gesamtimpuls im Schwerpunktsystem gilt: N N s pges = ∑ mi vis = ∑ mi (vi − vs ) i =1 i =1 N N = ∑ mi vi − vs ∑ mi = Mvs − vs M = 0 i =1 i =1 Des Gesamtimpuls im Schwerpunktsystem ist Null! Die kinetische Energie läßt sich aufteilen in die kinetische Energie der Bewegung des Gesamtsystems und der Bewegung im Schwerpunktsystem! Beispiel: Stoß, zwei Körper gleicher Masse, 2. Körper ruht v1 m1 vs m2 m1v1 + m2 v2 1 vs = = v1 m1 + m2 2 74 Im Schwerpunktsystem gilt: 75 Bewegung im Laborsystem nach dem Stoß: 1 v1s = v1 − vs = v1 2 1 v2s = v2 − vs = − v1 2 v1 ' = v1s '+ vs v2 ' = v2s '+ v1s v1s = −v2s v1 ' Bei dem Stoß im Schwerpunktsystem gilt Impulserhaltung: α m1v1s '+ m2 v2s ' = m1v1s + m2 v2s = 0 v1s ' = −v2s ' also auch vs v2 ' In diesem Fall haben die Endgeschwindigkeiten im Laborsystem zueinander einen Winkel von 90°! (Thaleskreis!) v1s ' v2 s ' Beim elastischen Stoß gilt Energieerhaltung: 1 2 1 2 1 2 1 m1 v1s ' + m2 v2 s ' = m1 v1s + m2 v2 s 2 2 2 2 2 Einsetzen: 1 2 1 2 1 2 1 m1 v1s ' + m2 −v1s ' = m1 v1s + m2 −v1s 2 2 2 2 v1s ' = v1s ⇒ Die Beträge bleiben gleich! v2 s ' = v2 s v2 s v1s ' v2 s ' 2 Kreis mit Radius v1/2 v1s m1 ≠ m2 , v1 ≠ 0, v2 ≠ 0 Allgemeiner Fall: Als Endzustände sind alle entgegengesetzten Vektoren mit Spitzen auf dem Kreis erlaubt! m1 > m2 v2 ' v1 vs v1 ' v2s ' v1s v1s ' v2 v2s Im Schwerpunktsystem bleiben beim elastischen Stoß die Beträge der Geschwindigkeiten der Körper erhalten; da der Gesamtimpuls Null ist, sind sie immer entgegengesetzt ausgerichtet.