kinetisch
Werbung

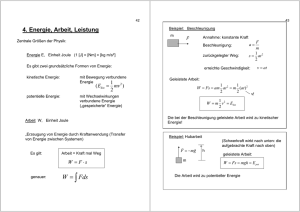
34 4. Energie, Arbeit, Leistung, Impuls 35 Beispiel: Beschleunigung m Zentrale Größen der Physik: Annahme: konstante Kraft F Beschleunigung: Energie E, Einheit Joule (1 [J] = [Nm] = [kg m2/s2] zurückgelegter Weg: F m 1 2 s = at 2 a= Es gibt zwei grundsätzliche Formen von Energie: v = at erreichte Geschwindigkeit: kinetische Energie: mit Bewegung verbundene Energie potentielle Energie: Geleistete Arbeit: 1 1 W = Fs = am at 2 = m (at ) 2 2 2 mit Wechselwirkungen verbundene Energie („gespeicherte“ Energie) Arbeit W, Einheit Joule „Erzeugung von Energie durch Kraftanwendung (Transfer von Energie zwischen Systemen) 1 W = m v 2 = Ekin 2 Die bei der Beschleunigung geleistete Arbeit wird zu kinetischer Energie! Beispiel: Hubarbeit (Schwerkraft wirkt nach unten: die aufgebrachte Kraft nach oben) F = − mg Es gilt: Arbeit = Kraft mal Weg W = F ⋅s v! m h geleistete Arbeit: W = Fs = mgh = E pot Die Arbeit wird zu potentieller Energie 36 Gleiche Arbeit! Die Potentielle Energie hängt nicht davon ab, wie sie erzeugt wurde! Beispiel: Spannen einer Feder x 37 Kraft einer Feder (Hooke‘sches Gesetz) F = − Dx l Allgemein: Vektorielle Beschreibung W = F ⋅s geleistete Arbeit: l r l 1 W = Fdx = ( Dx)dx = D l 2 = E pot 2 0 0 ∫ (für geraden Weg und konstante Kraft) ∫ ∫ W = F ( r ) ds = r0 i (für gerade Teilstücken) Potentielle Energie einer um l gedehnten (oder gestauchten) Feder. 4.1 Wegunabhängigkeit der pot. Energie Beispiel: schiefe Ebene F m W = mgh = E pot F Arbeit: über Rampe l α Arbeit: direktes Heben F⊥ h W = Fs = mg sin α l h = mg sin α = mgh sin α ∑ Fi ∆si Beispiel: Hubarbeit im Schwerefeld (ortsunabhängige Kraft) W= n ∑ i =1 F∆si = 0 ∆xi y 0 ∆ i i =1 mg ∆zi n ∑ n n i =1 i =1 = ∑ mg∆zi =mg ∑ ∆zi = mgh Eine Bewegung in x- oder y-Richtung spielt keine Rolle; es zählt nur die Bewegung in Richtung der Kraft. 38 39 4.2 Energieerhaltung Definition: Ein Kraftfeld, bei dem das Integral r ∫ Für ein abgeschlossenes System gilt: F ( r ) ds Ekin + Epot = konstant r0 nur von Anfangs- und Endpunkt, aber nicht vom Weg abhängt, heißt konservativ. Die Summe der kinetischen und der potentiellen Energie ist konstant; sie ändert sich nur, wenn Arbeit am System verrichtet wird. Aber: potentielle Energie kann in kinetische Energie umgewandelt werden und umgekehrt Bemerkung: das Kraftfeld ist der negative Gradient der potentiellen Energie Beispiel: freier Fall F (r ) = −∇E pot ∂ E pot ∂x ∂ = − E pot ∂y ∂ E pot ∂z Ein so gebildetes Kraftfeld ist immer konservativ! nachher: vorher: h m h m E pot = mgh E pot = 0 m Ekin = v 2 2 Ekin = 0 Beispiel: Schwerefeld F = −∇E pot 0 = −∇(mgz ) = 0 − mg Mit der Energieerhaltung folgt: und damit: mgh = v = 2 gh m 2 v 2 v 40 nachrechnen: 41 Körper am äußeren Umkehrpunkt: zeitabhängige Höhe beim Fall Zeit beim Erreichen von z=0 Geschwindigkeit hier 1 z (t ) = h − gt 2 2 2h t= g 1 2 Ekin = mvmin =0 2 kinetische Energie ist minimal 1 2 1 E pot = Dxmax = Dx02 2 2 potentielle Energie ist maximal v = gt = 2 gh Wegen der Energieerhaltung gilt damit: Gleiches Ergebnis! 1 1 2 m( x0ω ) 2 = Dx0 2 2 Beispiel: harmonische Schwingung m mω 2 = D x(t ) = x0 cos ωt ω= v (t ) = − x0ω sin ωt D m Schwingungsfrequenz Federpendel x Ständiges Umwandeln von potentieller in kinetische Energie und umgekehrt. Andere Herleitung: es ist Körper in der Mitte: kinetische Energie ist maximal potentielle Energie ist minimal 1 2 m Ekin = mvmax = ( x0ω ) 2 2 2 1 2 E pot = Dxmin =0 2 also Es gilt das heißt also a (t ) = − x0ω 2 cos ωt a = −ω 2 x (t ) F = ma − Dx = −mω 2 x ω= D m 42 4.3 Leistung 43 Beispiel: elektrische Birne, P=100 W (Leistung) Leistung ist Arbeit pro Zeit Einheit Watt [W] = [J/s]=[Nm/s] genauer: P= W t P= dW dt Geleistete Arbeit ist brennt 10 h: W = Pt = 100 W*10 h = 1000 Wh 1000 Wh = 1000 W*3600s = 3.6 106 Ws = 3.6 MJ Die gleiche Arbeit wird benötigt, um 360000 kg um 1m anzuheben! 4.4 Impuls W = Pt „Herleitung“: es gilt m1 t bzw. W = ∫ Pdt 0 Kräfte: Beispiel: Hubarbeit 10 kg werden um 10 m angehoben W = mgh ≈ 1000 J W 1000 J geleistet in 5 min (300s): P= = = 3.3W t 300s 1000 J geleistet in 10 s: P= = 100W 10s Arbeit: actio = reactio mit mit F = ma dv a= dt also m1v1 + m2 v2 F1 F2 m2 F2 = − F1 m2 a2 = − m1a1 dv 2 dv1 m2 = −m1 dt dt d ( m1v1 + m2 v2 ) = 0 dt bleibt konstant! 44 Definition: 45 4.5 Impulserhaltung p = mv Impuls: actio = reactio gilt auch für ein System aus beliebig vielen Körpern: m1 Für einen einzelnen Körper gilt: t t F (t ) v (t ) = v0 + a (t )dt = v0 + dt m 0 0 ∫ ∫ Mutipliziert mit m: m2 m3 F1 F 3 F2 F6 m4 F5 N ∑ Fi = 0 F4 i =1 m5 m6 t ∫ p (t ) = p0 + F (t ) dt Für die Summe der Impulse gilt: 0 Bei konstanter Kraft und N N N 0 0 p = ( p + F t ) = p + t ∑ i ∑ i i ∑ i ∑ Fi N p0 = 0 i =1 p = F ⋅t Impuls ist Kraft mal Zeit! (Erinnerung: Arbeit ist Kraft mal Weg) i =1 i =1 i =1 0 = Pges + t ⋅ 0 = Pges In einem System, auf das keine äußeren Kräfte wirken, ist der Gesamtimpuls eine Erhaltungsgröße 46 Energieerhaltung: 4.6 Zentraler Stoß Impuls- und Energieerhaltung bestimmen, welche Endzustände eines Systems nach einer Wechselwirkung (Austausch von Energie und Impuls) erlaubt sind. Wechselwirkung 1 2 1 2 1 2 m1 v1 = m1 v '1 + m2 v '2 2 2 2 hier: eindimensional (Bewegung auf einer Linie) m2 v '2 m1 1 1 2 2 1 2 m1v1 = m1v '1 + m2 v'2 2 2 2 v '1 = v1 − p '1 , p'2 , p '3 ... E1 , E2 , E3 ... E '1 , E '2 , E '3 ... ∑ p =∑ p ' ∑ E =∑ E ' Es gilt: i E ges = E ' ges Damit lauten die beiden Gleichungen: nachher vorher p1 , p2 , p3 ... 47 i i i Zwei Gleichungen, zwei Unbekannte (v‘1, v‘2) ⇒ eindeutige Lösung! Einsetzen: 2 1 1 1 m 2 2 m1v1 = m1 v1 − 2 v'2 + m2 v'2 2 2 m1 2 Beispiel: zentraler Stoß zwischen zwei Massen, 2. Masse ruht m1 v1 Impulserhaltung: daraus folgt: m2 v '1 p ges = p' ges m1v1 = m1v '1 + m2 v '2 m v '1 = v1 − 2 v '2 m1 m1 m2 v '2 ⇔ ⇔ ⇔ ⇔ 1 1 m 2m2 m m2 1 2 2 2 m1v1 = m1v1 − 1 v1v '2 + 1 22 v '22 + m2 v '2 2 2 2 m1 2 m1 2 2 m 1 2 0 = − m2 v1v'2 + 2 v'22 + m2 v'2 2m1 2 2 m + m1m2 2 m2 v1v '2 = 2 v '2 2m1 v '22 = 2m1 v1v '2 m1 + m2 48 Zwei Lösungen: Lösung 1: 49 3. m1 >> m2 v '2 = 0 hier gilt: v'1 = v1 v '2 ≈ 2v1 v '1 ≈ v1 („Triviale“ Lösung: Stoß hat nicht stattgefunden) Lösung 2: Der stoßende Körper wird kaum verlangsamt; der gestoßene Körper erhält die doppelte Geschwindigkeit des stoßenden Körpers! 2m1 v1 m1 + m2 m m − m2 v '1 = v1 − 2 v'2 = 1 v1 m1 m1 + m2 v '2 = Allgemein: dreidimensionaler Stoß m1 v1 v2 Diskussion dieses Resultats für verschiedene Fälle: 1. m1 = m2 v'2 = v1 hier gilt: Hier gilt: v '1 = 0 Der Impuls (und die kinetische Energie) werden vollständig auf den gestoßenen Körper übertragen. 2. m1 << m2 hier gilt: 2m1 v1 m2 v '1 ≈ −v1 v '2 ≈ ( p'2 ≈ 2 p1!) Der stoßende Körper wird reflektiert; der gestoßene Körper erhält den doppelten Impuls des stoßenden Körpers! m2 m1v1 + m2 v2 = m1v '1 + m2 v '2 Impulserhaltung 1 2 1 2 1 2 1 2 m1 v1 + m2 v2 = m1 v '1 + m2 v '2 2 2 2 2 Energieerhaltung Dies sind 4 Gleichungen mit 6 Unbekannten ( v '1 , v '2 ) ⇒ Lösung bestimmt bis auf zwei freie Parameter! (z.B. legt die Wahl der Richtung von fest) v1 ' alle anderen Werte 50 51 Jetzt: Rakete 4.7 Anwendung der Impulserhaltung: Rakete vw m1 v1 Person in Boot in Ruhe wirft eine Kugel mit Wurfgeschwindigkeit vw (Geschwindigkeit relativ zur Person) v2 m2 m1 m vD Vortrieb durch Wurf: m2 heiße Gase Dadurch erhält das Boot (und die Person) einen Impuls bzw. eine Geschwindigkeit in Gegenrichtung Brennkammer und Düse v In der Zeit ∆t wird die Masse -∆m mit Geschwindigkeit vD ausgestoßen. Treibstoff Geschwindigkeitszunahme dadurch (∆m <<m): ∆v = − ∆m vD m (m ist die Raketenmasse; die Masse der ausgestoßenen Gase ist -∆m) Es gilt: v1 + v2 = vW Impulserhaltung: m1v1 = m2 v2 Umformen und Übergang zu infinitesimal kleiner Zeit (∆t→dt): also m1v1 = m2 (vW − v1 ) ⇒ m2 v1 = vW m1 + m2 v2 = Für m1 << m2 wird dies zu: v1 ≈ vW dv 1 = − vD dm m Integration über m: m1 vW m1 + m2 und ⇒ v2 ≈ Ausstoß von Masse erzeugt Vortrieb! m1 vW m2 m m 0 0 dv 1 ∫m dmdm = −m∫ m vD dm v (m) − v (m0 ) = −vD (ln(m) − ln(m0 )) = vD ln( m0 ) m Falls v(m0) = 0 ist (Startgeschwindigkeit Null): v = vD ln( m0 ) m Raketengeschwindigkeit 52 Die von einer Rakete erreichbare Geschwindigkeit hängt von dem Verhältnis der Start- und Endmasse und der Düsengasgeschwindigkeit ab. Typische Werte: 53 Für die Reibungskraft gilt: Körper bewegt sich („Gleitreibung“): FR = µF⊥ m0 =6 m Reibungskoeffizient vD = 2000 ms Körper ruht („Haftreibung “): vEnd ≈ 3600 ms Damit: F ' R = µ ' F⊥ 4.8 Reibung Reibung verwandelt Arbeit in Wärmeenergie ⇒Verlust von kinetischer Energie ohne Erzeugung von potentieller Energie Es gibt verschiedene Formen der Reibung; diese lassen sich näherungsweise durch Gesetze beschreiben. 1. Coulomb-Reibung FR m v F⊥ Die Reibungskraft ist unabhängig von der Geschwindigkeit und der Auflagefläche! Typische Werte: Stahl auf Stahl (poliert) Gummi auf Asphalt Oberflächenreibung: die Bewegung eines mit Anpresskraft F ⊥ auf die Oberfläche gedrückten Körpers erzeugt eine Reibungskraft F R µ ' ≈ 0.7 µ ≈ 0.4 µ ' ≈ 1.2 µ ≈ 1.0 µ ' ≈ 0.6 µ ≈ 0.4 trocken naß 54 Beispiel: maximal mögliches Beschleunigen eines Autos 55 3. Newton-Reibung Drehende Räder können maximal die Haftreibungskraft auf die Straße ausüben, blockierende Räder die Gleitreibungskraft. Die maximal mögliche (positive oder negative!) Beschleunigung ist damit: a= bzw. FR µF⊥ µ mg = = = µg m m m F' a' = R = µ ' g m FR Schneller Körper in leichter Flüssigkeit oder Gas v Hier gilt für die Reibungskraft: 1 F = cW ρ Av 2 2 v Geschwindigkeit Ein Fahrzeug mit Gummireifen kann auf Asphalt also mit maximal 1.2 g beschleunigen! cW Widerstandsbeiwert des Körpers A Querschnittsfläche des Körpers (senkrecht zur Geschwindigkeit) Die Kraft ist proportional zum Quadrat der Geschwindigkeit! 2. Stokes-Reibung Bei der Bewegung aufgebrachte Leistung: FR Kugel in viskoser (zäher) Flüssigkeit v Hier gilt für die Reibungskraft: F = 6πηrv v Geschwindigkeit P= η r Fs 1 = Fv = cW ρ Av 3 t 2 Beispiel: Auto Viskositätskonstante der Flüssigkeit Kugelradius Die Kraft ist proportional zur Geschwindigkeit! A = 2.5 m2 ρ = 1.29 kg/m3 (Luft) cW = 0.3 v = 100 km/h (27.8 m/s) : F = 374 N P = 10393 W ( = 14 PS) v = 200 km/h (56 m/s) : F = 1495 N P = 83146 W ( = 113 PS) 56 4.9 Inelastischer Stoß 57 Die kinetische Energie wird verringert. Es gilt nur die Erhaltung der Gesamtenergie: „Reibungseffekte“ (Umwandlung kinetischer Energie in Wärmeenergie) verändern Stöße. Ekin + E pot + EW = E 'kin + E ' pot + E 'W Hier ist Beispiel: vollinelastischer zentraler Stoß m1 m1 m2 v1 m2 v '1 = v '2 Kugeln bleiben zusammen Dämpfer Es gilt: Impulserhaltung ⇔ ⇔ Pges = P ' ges m1v1 = m1v '1 + m2 v '2 = (m1 + m2 )v '1 v '1 = m1 v1 m1 + m2 Für die kinetische Energie gilt: vorher: nachher: 1 kin E ges = m1v12 2 1 1 1 E 'kin m1v'12 + m2 v'22 = (m1 + m2 )v'12 ges = 2 2 2 2 1 m1 m1 kin v12 = = E ges 2 m1 + m2 m1 + m2 E pot = E ' pot = 0 Damit gilt für die Wärmeenergie: E 'W = EW + Ekin − E 'kin = EW + m2 Ekin m1 + m2 Die fehlende kinetische Energie ist in Wärmeenergie umgewandelt worden. Merke: bei inelastischen Prozessen gilt Impulserhaltung, aber nicht die Erhaltung der kinetischen Energie! (sondern nur die Erhaltung der Gesamtenergie)