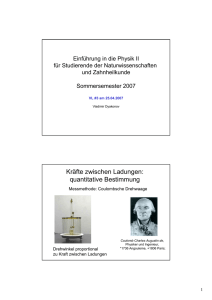
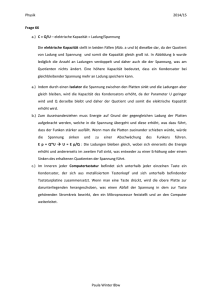
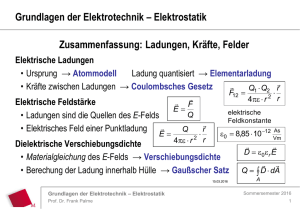
Elektrostatik
Werbung

Ferienkurs Elektrodynamik Elektrostatik Michael Drews 15.03.10 Inhaltsverzeichnis 1 Vektoranalysis 1.1 Grundbegriffe . . . . . . . . . . . . . . . 1.2 Integralsätze . . . . . . . . . . . . . . . 1.2.1 Integral über ein Gradientenfeld 1.2.2 Satz von Gauß . . . . . . . . . . 1.2.3 Satz von Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 2 3 3 3 2 Elektrostatik im Vakuum 2.1 Coulomb-Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Unsymmetrische Ladungsverteilungen . . . . . . . . . . . . . . . 2.3 Symmetrische Ladungsverteilungen . . . . . . . . . . . . . . . . . 2.4 Das elektrische Potential . . . . . . . . . . . . . . . . . . . . . . . 2.5 Potential einer Punktladung und asymmetrische Ladungsverteilungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6 Poisson-Gleichung und Laplace-Gleichung . . . . . . . . . . . . . 2.7 Leiter und Kapazitäten . . . . . . . . . . . . . . . . . . . . . . . 2.7.1 Leiter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7.2 Kapazitäten . . . . . . . . . . . . . . . . . . . . . . . . . . 2.8 Eindeutigkeit der Lösung der Laplace-Gleichung . . . . . . . . . 2.9 Spiegelladungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.10 Trennung der Variablen . . . . . . . . . . . . . . . . . . . . . . . 2.10.1 Grundprinzip in kartesischen Koordinaten . . . . . . . . . 2.10.2 Kugelkoordinaten . . . . . . . . . . . . . . . . . . . . . . . 2.11 Die Energie einer Ladungsverteilung . . . . . . . . . . . . . . . . 7 8 8 9 10 10 11 12 12 13 14 3 Elektrische Felder im Medium 3.1 Polarisation . . . . . . . . . . . . . . . . . 3.2 Der Gauss’sche Satz im Dielektrikum . . . 3.3 Lineare Dielektrika . . . . . . . . . . . . . 3.4 Bedingungen am Rand des Dielektrikums 3.5 Energie in dielektrischen Systemen . . . . 15 15 16 16 17 17 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 5 6 7 1 1.1 Vektoranalysis Grundbegriffe Nur zur Wiederholung sollen hier kurz die wichtigsten Grundbegriffe der Vektoranalysis aufgelistet sein. Vektoranalysis bedeutet in der Praxis, man hat entweder ein Skalarfeld f (~r) ~ r), mit denen man irgendwelche Operationen im definieroder ein Vektorfeld A(~ ten Raum (also dem <3 ) ausführt. DER Operator dabei ist der Nabla-Operator ∇: ∂/∂x ∇ = ∂/∂y ∂/∂z Mithilfe von ∇ kann man alle Operationen darstellen, die man braucht. ∂f /∂x Gradient ∇f (~r) = grad f (~r) = ∂f /∂y ) ∂f /∂z Laplace ∇2 f (~r) = ∆f (~r) = ∂ 2 f /∂x2 + ∂ 2 f /∂y 2 + ∂ 2 f /∂z 2 Divergenz ax (~r) ~ r) = div A(~ ~ r) = ∇ · ay (~r) = ∂Ax /∂x + ∂Ay /∂y + ∂Az /∂z ∇ · A(~ az (~r) Rotation ∂y Az − ∂z Ay ~ r) = rot A(~ ~ r) = ∂x Az − ∂z Ax ∇ × A(~ ∂x Ay − ∂y Ax Da viele Probleme Zylinder- oder Kugelsymmetrie aufweisen, muss man diese Operationen häufig in den Zylinder- oder Kugelkoordinaten ausdrücken. Im Anhang findet ihr die entsprechenden Ausdrücke. Anschaulich zeigt der Gradient in die Richtung des stärksten Anstiegs von f (~r), ~ r) (d.h. die Antwort auf die Divergenz ist so viel wie die Quellendichte von A(~ die Frage Ist hier irgendwo ein Punkt, von dem aus mehr das Vektorfeld mehr ” wegzeigt als hinzeigt, oder ist es genau ausgeglichen?“) und die Rotation die Wirbeldichte (d.h. die Antwort auf die Frage Dreht sich das Vektorfeld hier ” um irgendeinen Punkt rechtsrum oder linksrum, oder gar nicht?“). 1.2 Integralsätze Der bekannte Fundamentalsatz der Analysis besagt, dass Z b F (x) dx = f (b) − f (a) a 2 wenn df /dx = F (x) gilt. Also Z b df /dx dx = f (b) − f (a) a In anderen Worten: Das Integral über die Ableitung einer Funktion, ist die Differenz der Funktionswerte an den Grenzen des Integrationsintervalls. Dies lässt sich - sehr vereinfacht gesehen - geometrisch auch auf höhere Dimensionen erweitern und ergibt dann nichts anderes als den Satz über konservative Kraftfelder, den Satz von Gauß und den Satz von Stokes. Die Ableitung ist in dem Fall dann eben der Gradient, die Divergenz oder die Rotation. 1.2.1 Integral über ein Gradientenfeld Nimmt man den Gradienten als Ableitungsoperation und einen eindimensionalen Integrationspfad S, der beim Punkt ~a anfängt und beim Punkt ~b aufhört ergibt sich Z ∇f (~r) d~s = f (~b) − f (~a) S weil die Grenzen des Pfads natürlich genau die beiden Endpunkte sind. Daraus ergibt sich natürlich gleich die Aussage, dass die Integration über ein Gradientenfeld unabhängig vom Integrationspfad ist, und nur vom Anfangs- und Endpunkt abhängt, und dass jedes Kreisintegral über ein Gradientenfeld daher gleich Null sein muss. 1.2.2 Satz von Gauß Man nehme die Divergenz als Ableitungsoperation und integriere über ein Volumen V: Z I ~ r) dr3 = ~ r) d~a ∇ · A(~ A(~ V ∂V Hier ist ∂V der Rand des Volumens (also eine Fläche) und d~a = ~n · da das orientierte infinitesimale Flächenelement auf ∂V . 1.2.3 Satz von Stokes Man nehme die Rotation als Ableitungsoperation und integriere über eine Fläche A: Z I ~ r)) d~a = ~ r) d~s (∇ × A(~ A(~ A ∂A Hier ist ∂A der Rand der Fläche A (also eine geschlossene Kurve) und d~s das infinitesimale Wegelement entlang ∂A. 3 Aber aufgepasst: Das Prinzip bei einem Integral über eine ableitungsähnliche Operation die Ableitung wegzulassen und über die Grenzen des vorherigen Integrationsbereiches zu integrieren, ist zwar grundsätzlich richtig, muss im Einzelnen aber genauer behandelt werden und ist daher nur als Eselsbrücke zu verstehen. 2 Elektrostatik im Vakuum Normalerweise wird die Elektrostatik erst phänomenologisch über das CoulombGesetz et cetera entwickelt und dann irgendwann bei der Elektrodynamik werden die Maxwell-Gleichungen hergeleitet“. ” Man kann es aber auch andersherum machen und sieht das Ganze dann vielleicht von einer anderen Perspektive. Die Maxwellgleichungen kann man nämlich durchaus als Axiome ansehen, die ohne Beweis als wahr angenommen werden, deren Gültigkeit aber experimentell noch nie widerlegt wurde. In der Elektrostatik bleiben dann im Prinzip zwei Gleichungen, die alles erklären, denn erstens hängt nichts von der Zeit ab, zweitens interessieren uns die Formeln, die etwas über die B-Felder aussagen erstmal gar nicht. Also gilt (im Vakuum): ~ r) = ∇ · E(~ ρ(~r) 0 (1) ~ r) = 0 ∇ × E(~ (2) Das E-Feld ist ein Vektorfeld und beschreibt Stärke und Richtung des elektrischen Feldes an einem Ort ~r im Raum. Es ist so definiert, dass man durch Multiplikation mit einer Probeladung Q die elektrische Kraft, die auf diese Ladung wirkt, erhält. ~ F~ = Q · E 2.1 Coulomb-Gesetz Das Coulomb-Gesetz sagt einem das ortsabhängige elektrische Feld einer Punktladung. Also schaut man sich Gleichung (1) mit der Ladungverteilung ρ = q·δ(~r) an (die Ladung sei oBdA genau am Ursprung). Um eine Punktladung kann man sich herumdrehen wie man will, sie schaut immer gleich aus. Dies bedeutet, dass das Problem kugelsymmetrisch ist (d.h. wir gehen in Kugelkoordinaten) und dass das E-Feld vollkommen unabhängig von den Winkeln φ und θ immer in radiale Richtung zeigen muss. Wenn man Gleichung (1) dann über das Volumen einer Kugel K mit Radius a integriert, ergibt sich. Z Z 2π Z π Z a 1 ∂(r2 Er ) 3 ~ ∇ · Ed r = dφ dθsin(θ) drr2 · 2 r ∂r K 0 0 0 4 Er ist auf der Kugeloberfläche ja konstant (wg. Rotationssymmetrie), also Z Z a ~ 3 r = 4π ∇ · Ed 2rEr dr = 4πEr a2 K 0 Auf der rechten Seite integriert man über eine Delta-Funktion mit dem Vorfaktor q, also Z ρ 3 q d r= 0 K 0 Gleichsetzen und auflösen nach Er ergibt Er = 1 q 4π0 a2 Der Radius a der Integrationskugel K ist vollkommen beliebig. Wir wissen also - um es jetzt noch in der bekannten Form zu schreiben -, dass das elektrische Feld im Abstand r ~ r) = E(~ 1 q · eˆr 4π0 r2 ist. Im ganz allgemeinen Fall muss man eˆr durch den Einheitsrelativvektor ~ r −r~0 zwischen Ortsvariable ~r und Ortsvektor der Punktladung r~0 , und r durch k~ r −r~0 k den entsprechenden Relativabstand ersetzen. Dies muss man nur im Hinterkopf bewahren. 2.2 Unsymmetrische Ladungsverteilungen Angenommen, man hat eine Ladungsverteilung, die aus N Punktladungen qi an den Orten r~i besteht. Dann gilt das Superpositionsprinzip und man kann das resultierende E-Feld einfach als Summe aus den einzelnen Coulumbfeldern darstellen. ~ r) = E(~ X i 1 qi ~r − r~i · 4π0 k~r − r~i k2 k~r − r~i k Liegt eine kontinuierliche Ladungsverteilung ρ(~r) vor, so geht die obige Summe einfach in ein Integral über. ~ r) = E(~ 1 4π0 Z <3 ρ(r~0 ) ~r − r~0 dr0 · k~r − r~0 k2 k~r − r~0 k Dieses Integral wirklich zu lösen kann im Einzelfall sehr hässlich werden. Es ist aber quasi die Lösung von Gleichung (1). 5 2.3 Symmetrische Ladungsverteilungen Im Normalfall (d.h. in den Spezialfällen, die in den Übungsaufgaben behandelt werden) hat man aber mehr oder weniger symmetrische oder einfache Ladungsverteilungen. Dann kann man meistens den Trick anwenden eine sogenannte gauss’sche Oberfläche, die zur Symmetrie passt, in die Anordnung zu legen und Gleichung (1) über deren Volumen zu integrieren. Durch Anwendungen vom Gauss’schen Satz und Ausnutzung der Symmetrieargumente wird das Integral dann extrem vereinfacht. Dafür muss man das Ganze natürlich noch in den entsprechenden Koordinaten behandeln, die zur Symmetrie passen. Dabei handelt sich eigentlich immer um: • Kugelsymmetrie • Zylindersymmetrie (meistens unter der Annahme eines großen Zylinders, um Randeffekte zu vernachlässigen) • Platten (auch unter der Annahme sie wären unendlich ausgedehnt, um Randeffekte zu vernachlässigen) Beispiel: geladene Platte Die Platte habe die Flächenladung σ und liege in der y-z-Ebene, sodass die xAchse die Distanz zur Platte angibt. Dann integriert man Gleichung (1) über einen Quader Q, dessen Oberseite die Fläche A hat und in dessen Mitte genau die Platte liegt. Z Z ρ 3 ~ 3r = d r ∇ · Ed V V 0 Z ~ = σA ~ · da E 0 ∂V Auf der linken Seite wurde der Satz von Gauss angewendet, auf der rechten einfach integriert. Jetzt ist bei dieser Anordnung ja zu erwarten, dass das E~ = E · da, weil es auf ~ · da Feld immer parallel zur x-Achse ist. Das heißt, dass E ~ der linken Seite zwar in negative Richtung zeigt, der Flächennormalvektor da aber auch in negative Richtung zeigt, während auf der rechten Seite beides in positive Richtung zeigt. Ausserdem muss das Feld wegen Symmetrie auf beiden Seiten den gleichen Betrag haben und kann auch nicht von y oder z abhängen. Also: σA 0 σ ⇒E= 20 E · 2A = oder ~ r) = σ · e~ˆx E(~ 20 Die Aussage ist: Der Flächennormalvektor zeigt immer nach oben von der Fläche weg. Oft (in Aufgaben dieser Art) zeigt der E-Vektor in die gleiche Richtung. 6 2.4 Das elektrische Potential Nun schauen wir, was Gleichung (2) uns eigentlich sagt: ~ r) = 0 ∇ × E(~ In der klassichen Mechanik hat man schon gelernt, dass ein Gradientenfeld rotationsfrei ist, oder mathematisch ausgedrückt, dass ∇ × (∇Φ) = 0 für eine beliebige skalare Funktion Φ. Letztendlich ist der Umkehrschluss auch erlaubt: Weil man weiß, dass E rotationsfrei ist, weißman auch, dass es sich als Gradient ausdrücken lassen muss. Man definiert ~ = −∇Φ E und nennt Φ das elektrische Potential. Es hat die Einheit Volt. ~ von einem Ort ~a zu einem Ort ~b entlang einem Pfad S ergibt Integriert man E sich also: Z Z ~ = ~ = −(Φ(b) − Φ(a)) =: −∆Φ ~ · ds E −∇Φ · ds S S ~ ja die Kraft auf eine Ladung q war, Wenn man sich daran erinnert, dass q · E dann muss also q · (−∆Φ) die Arbeit sein, die eine Ladung auf dem Weg S verrichtet ( Kraf t · W eg = Arbeit ). Φ ist also mit der elektrischen potentiellen Energie einer Ladung korreliert. Es ist jedoch ganz wichtig zu sagen, dass Φ nicht die potentielle Energie ist. Erstens stimmt natürlich die Einheit nicht. Zweitens ist eine Aussage über das Potential an einem Punkt immer bezogen auf das Potential an einem Referenzpunkt. Üblicherweise legt man das Potential im Unendlichen auf 0. Das muss aber nicht so sein. Hat man ein System, bei dem zum Beispiel irgendein Leiter geerdet ist, so bedeutet dies, dass das Potential im und auf dem Leiter per Definition 0 sein soll (das ist natürlich kein Widerspruch dazu, dass es im Unendlichen wieder 0 werden kann, aber man muss eben aufpassen, was man tut). Auf die Ableitung ~ = −∇Φ hat das aber natürlich keine Auswirkung, weil Konstanten bei der E Ableitung ja verschwinden. Daher macht es eigentlich auch nur Sinn über Potentialdifferenzen zu sprechen, d.h. eben über das ∆Φ zwischen zwei Punkten. Je nachdem wohin man seinen Energienullpunkt definiert, ist nämlich der absolute Wert von Φ anders. 2.5 Potential einer Punktladung und asymmetrische Ladungsverteilungen Wie sieht Φ für eine Punktladung am Urpsrung des Koordinatensystems aus? ~ in dem Fall aussieht. Weil E ~ nur vom Radius abhängt Man weißschon, wie E 7 und in radiale Richtung zeigt, muss Φ also logischerweise auch nur vom Radius abhängen. Wegen ∇f (r) = ∂f ˆ · e~r ∂r ~ einmal über r integrieren, um das Potential zu muss man nur den Betrag von E erhalten. Aber von wo nach wo? Das ist genau das Problem mit dem Referenzpunkt. Die untere Integralgrenze sagt einem, wo man Φ(r) = 0 erhalten wird. Das ist im Prinzip beliebig. Bei Punktladungen setzt man diesen Punkt eben ins Unendliche: Z r 1 h q ir 1 q 1 q 0 dr = = Φ(r) = − 2 0 0 4π0 r ∞ 4π0 r ∞ 4π0 r Zur Vorstellung: So wie Φ nun definiert ist, stellen also negative Ladungen Sen” ken“ und positive Ladungen Hügel“ in der Potentiallandschaft dar. Wenn man ” also eine Kugel durch diese Landschaft rollen lässt, erhält man die Trajektorie einer positiven Ladung in der enstprechenden Ladungsverteilung. Für negative Ladungen muss man die Landschaft nochmal spiegeln. Analog zur Herleitung des E-Feldes für kontinuierliche Ladungsverteilungen kann man hier auch sagen, dass Z 1 ρ(r~0 ) 3 0 Φ(~r) = d r 4π0 k~r − r~0 k für eine kontinuierliche, beliebige Ladungsverteilung ρ~r im Raum. 2.6 Poisson-Gleichung und Laplace-Gleichung ~ = −∇Φ wieder in Gleichung (1) ein, bekommt man Setzt man nun E ρ ∇2 Φ = − 0 (3) Dies ist die Poisson-Gleichung. Sie ist so wichtig, weil es bei vielen System viel leichter ist, diese Gleichung zu lösen und dann mit dem Gradienten das E-Feld auszurechnen, als die pure Gleichung (1) zu lösen. Schließlich hat man hier nur eine Funktion zu finden und nicht drei, wie beim E-Feld (x-, y-, und z-Komponente). Insbesondere in Regionen, wo keine Ladung ist (und meistens interessiert einen das E-Feld genau da) wird sie zur Laplace-Gleichung ∇2 Φ = 0 Wie genau die Laplace-Gleichung jetzt gelöst wird, kommt später im Skript. Es ist jetzt erstmal nur wichtig sie gesehen zu haben. 2.7 Leiter und Kapazitäten Die Eigenschaften von Leitern und Kapazitäten (oder Kondensatoren) in einem E-Feld werden im Prinzip über ihre Eigenschaften im Bezug auf das elektrische Potential definiert. 8 2.7.1 Leiter Dort wo ein Leiter ist, ist das elektrische Potential konstant. Anders ausgedrückt Leiter sind Raumregionen konstanten Potentials. Dies liegt daran das sich die freien Ladungen in den Leitern so lange herumbewegen, bis keine Kräfte mehr ~ = 0 ist. Wo E ~ = 0 ist, muss natürlich Φ = const. an ihnen angreifen, bis also E sein. Dies hat ein paar Konsequenzen: • ρ = 0 innerhalb des Leiters ~ = Dies folgt ganz einfach aus ∇ · E ρ 0 . • Die Ladung befindet sich auf der Oberfläche Sollte der Leiter geladen sein, befindet sich wegen ρ = 0 im Leiter, die gesamte Ladung auf der Oberfläche. ~ an der Oberfläche ~ k da • E Das E-Feld ganz kurz außerhalb des Leiters steht senkrecht auf seine Ober~ ist senkrecht zu Oberfläche). Hätte es eine Tangentialkomponenfläche (da te, würden die Ladungen auf der Oberfläche beginnen zu fließen, solange bis sie durch ihre Verschiebung die Tangentialkomponente auslöschen. Die Normalkomponente dagegen können sie nicht auslöschen, weil sie ja nicht aus dem Leiter herausfließen können. • Der Leiter hat eine Oberflächenladung σ Man stelle sich eine ganz kleine Gauss’sche Box vor, die ein ganz kleines Oberflächenstück des Leiters beinhaltet. Die Box ist so klein, dass σ ≈ ~ ≈ const. auf diesem Stückchen. Die Oberseite der Box ist const. und E parallel zur Oberfläche also senkrecht zum E-Feld ausgerichtet. Daher ergibt Integration über Gleichung (1): ~ · n̂)0 = −0 σ = (E ∂V ∂n bzw. |σ| = E0 Dies nennt man induzierte Ladung. Die gesamte induzierte Ladung über die Oberfläche integriert muss 0 oder die vorherige Ladung des Leiters ergeben (es entsteht ja keine Ladung). • Es wirkt eine Kraft auf den Leiter. Die Oberflächenladung wird letztendlich so induziert, dass der Leiter in das Feld hineingezogen wird: Eine äußere negative Ladung erzeugt auf der zugewandten Seite des Leiters positive Ladungen und auf der abgewandten Seite negative. Deswegen wirkt eine Kraft auf den Leiter. Diese Kraft berechnet sich einfach aus dem Produkt der Oberflächenladung mit dem E-Feld an der Oberfläche, von dem aber noch der Teil abgezogen werden muss, den die Oberflächenladung selbst erzeugt. Genauere Betrachtung (siehe Griffiths, S.102/103) ergibt die Kraft ~ = 1 σ 2 n̂ df 20 9 auf das Oberflächenelement d~a, bzw. den Druck 0 dp = E 2 2 mit dem Betrag von E genau über dem Oberflächenelement. 2.7.2 Kapazitäten Ein Kondensator besteht eigentlich immer aus einer Anordnung von zwei Leitern, die genau gegengleich geladen sind. Zwischen den Leitern bildet sich dann ~ = −∇Φ existiert irgendein Potentialgradient irgendein Feld aus, d.h. wegen E zwischen den Leitern. Weil Φ die Einheit Volt besitzt spricht man in dem Fall von einem Spannungsgradient. D.h. Φ muss auf den beiden Leitern unterschiedliche Werte annehmen. Die Kapazität ist nun einfach definiert als Verhältnis zwischen Ladung und Spannungsdifferenz zwischen den Leitern. C= Q ∆Φ D.h. man braucht wieder Φ. 2.8 Eindeutigkeit der Lösung der Laplace-Gleichung Bevor man jetzt kompliziertere Probleme ausrechnet, sollte man noch wissen, dass es letztendlich bei allem, was nicht ganz einfach z.B. mit dem Satz von Gauss zu lösen ist, darum geht, die Laplace-Gleichung zu lösen, also ∇2 Φ = 0 Zu dieser Laplace-Gleichung existiert nämlich ein Theorem, das besagt, dass jede Lösung, die diese Gleichung und die systemspezifischen Randbedingungen erfüllt, die einzige und richtige Lösung ist, die existiert. Das bedeutet, egal auf welchem Weg man zu einer Lösung gekommen ist, wenn es eine Lösung ist, dann ist es DIE Lösung. Beweis: Hier jetzt ein ganz kurzer und sinngemäßer Beweis des Theorems. Funktionen f , die die Gleichung ∇2 f = 0 erfüllen, werden harmonische Funktionen genannt. Eine wichtige Eigenschaft der harmonischen Funktionen ist die Mittelwerteigenschaft. Dies bedeutet, dass der Funktionswert an einem Ort ~r immer gleich dem Mittelwert aller Funktionswerte auf einer Kugel neben diesem Funktionswert ist. Dies ist wiederum gleichbedeutend damit, dass eine harmonische Funktion nur an den Rändern ihres Definitionsbereichs Maxima oder Minima annehmen kann. Die Annahme sei, Φ1 und Φ2 seien zwei verschiedene Lösungen der LaplaceGleichung für dasselbe System. Damit ist auch Φ3 = Φ1 − Φ2 10 eine weitere Lösung der Laplace-Gleichung, weil die Anwendung des LaplaceOperators auf Φ3 wieder 0 ergibt. Weil aber Φ1 und Φ2 beide die gleichen Randbedingungen erfüllen, muss deren Differenz an den Rändern gleich 0 sein. Es gilt also Φ3 = 0 an den Rändern. Weil Φ3 aber eine harmonische Funktion ist, die ihre Maxima und Minima nur am Rand annehmen kann, muss Φ3 = 0 überall gelten. Damit ist Φ1 = Φ2 Es gibt also keine verschiedenen Lösungen der Laplace-Gleichung für dieselbe Situation. Bei manchen Problemen ist es nötig, die Laplace-Gleichung wirklich richtig zu lösen. Mit dem Wissen um dieses Theorem, kann man allerdings auch ein paar Tricks anwenden, z.B. die Methode der Spiegelladungen. 2.9 Spiegelladungen Bei dieser Methode hat man immer eine Ladung und einen Leiter und es geht darum, das elektrische Feld im Raum bzw. die Oberflächenladung auf dem Leiter auszurechnen. In vielen Fällen ist der Leiter geerdet, d.h. Φ = 0 auf dem Leiter. Eine weitere Randbedingung ist, dass Φ → 0 für r → ∞. Nun macht man sich die Eindeutigkeit der Lösung zunutze und versucht in passender (symmetrischer) Anordnung einfach imaginäre Ladungen in den Leiter (oder in den Bereich, in dem einen die Lösung nicht mehr interessiert) zu setzen, sodass aus der Überlagerung der imaginären E-Felder mit dem realen E-Feld, die geforderten Randbedingungen erfüllt werden. Ist dies möglich, so MUSS das erhaltene Feld in dem Raumbereich den man anschaut, die richtige Lösung der Laplace-Gleichung sein. Was in den anderen Bereichen passiert, ist eigentlich egal. Die physikalische Idee dahinter ist, dass die induzierten Oberflächenladungen auf dem Leiter sich so verteilen, dass sie die real vorhandene Ladung spiegeln und damit quasi das Bild einer imaginären Ladung im oder hinter dem Leiter erzeugen. Beispiel: zwei rechtwinklige Platten In einer Ecke zwischen zwei geerdete, rechtwinkligen Platten sitzt eine Punktladung q. Wie die Spiegelladungen verteilt werden müssen, um die LaplaceGleichung zu lösen, sieht man auf dem Bild. 11 Plausibel macht man sich das folgendermaßen: Hätte man nur eine Platte gegenüber einer Punktladung, so wäre die enstprechende Spiegelladungen genau achsensymmetrisch gegenüber der Punktladung auf der anderen Seite der Platte mit entgegengesetzter Ladung. Die Summe der Potentiale der beiden Ladungen ist entlang der Platte dann nämlich genau Null, weil jeder Punkt auf der Platte gleich weit von zwei entgegengesetzt gepolten Ladungen entfernt ist. Also ist es auf jeden Fall schonmal gut, die Ladung an jeder der beiden Platten zu spiegeln. Dann hat man nur noch das Problem, dass sich zwar zwei Ladungen entlang einer Platte aufheben, die dritte Ladung aber dazwischenfunkt und das Potential dort genau dem Potential der dritten Ladung entspricht. Also muss man die dritte Ladung auch noch an dieser Platte spiegeln, um das Potential dort auf 0 zu setzen. Jetzt muss man noch überprüfen, ob das Potential auf der zweiten Platte dadurch auch immer noch 0 ist. In diesem Fall ist es so: Die vierte Ausgleichsla” dung“ sitzt am gleichen Ort, egal von welcher Platte aus man diese Überlegung startet. Hätten die Platte einen Winkel ungleich 90o zueinander, geht das nicht: Bei einem spitzen Winkel erhält man eine unendliche Reihe von Spiegelladungen, bei einem stumpfen Winkel ist die Laplace-Gleichung nicht mit der Methode der Spiegelladungen lösbar. 2.10 Trennung der Variablen 2.10.1 Grundprinzip in kartesischen Koordinaten Eine andere Methode, um die Laplace-Gleichung zu lösen, ist die Trennung der Variablen. Kurz zusammengefasst: Man setzt an Φ(x, y, z = X(x) · Y (y) · Z(z). Also in der Laplace Gleichung: YZ · ∂2Y ∂2Z ∂2X + XZ · + XY · =0 2 2 ∂x ∂y ∂z 2 12 Teilen durch X · Y · Z liefert 1 ∂2Y 1 ∂2Z 1 ∂2X + · + · =0 · 2 2 X ∂x Y ∂y Z ∂z 2 Nun hat man drei Summanden, die von unterschiedlichen Variablen abhängen. Man argumentiert nun, man kann ja jeden Summanden an beliebiger Stelle auswerten, weil die beiden anderen Summanden ja von anderen Variablen abhängen. Wie soll dann aber die Summe 0 bleiben, wenn man zum Beispiel die Variable in einem Summanden beliebig ändert, während man die anderen beiden festhält. Die einzige Lösung ist, dass jeder der Summanden für sich eine Konstante ergeben muss, also 1 ∂2X · = Cx X ∂x2 1 ∂2Y · = Cy Y ∂y 2 1 ∂2Z · = Cz Z ∂z 2 mit Cx + Cy + Cz = 0. Nun löst man jede der drei Gleichungen für sich und vereinfacht (soweit es geht) durch Beachtung der systemspezifischen Randbedingungen. Dann bildet man das Produkt der Lösungen für, um Φ zu erhalten, und eliminiert die übrigen Integrationskonstanten mithilfe verbleibender Randbedingungen. 2.10.2 Kugelkoordinaten Häufig hat man es eben mit Kugeln zu tun, in dem Fall ist es immer sinnvoll in Kugelkoordinten überzugehen. Die Laplace-Gleichung lautet dann: 1 ∂ ∂ ∂2 1 ∂ 1 2 ∂ r + sinθ + Φ(~r) = 0 r2 ∂r ∂r r2 sinθ ∂θ ∂θ r2 sinθ ∂φ2 Mit einem ähnlichen Ansatz, in diesem Fall Φ = R(r)Y (θ, φ), geht man wieder in die Gleichung, sodass man wieder zwei unabhängige DGLs bekommt, nämlich: ∂ 2 ∂R r = Cr · R ∂r ∂r 1 ∂ ∂ 1 ∂2 sinθ + Y = Cy · Y sinθ ∂θ ∂θ sinθ ∂φ2 Die Funktionen Y , die die zweite Gleichung lösen, lernt man in der Vorlesung kennen. Dies sind genau die Kugelflächenfunktionen Ylm (θ, φ) und dann ist die Konstante Cy = −l(l + 1). Dies ist einfach so zu akzeptieren - die Kugelflächenfunktionen sind quasi genauso definiert, dass sie diese Gleichung lösen. Sie sind damit die Eigenfunktionen des Winkelanteils der Laplace-Operators und −l(l + 1) ist der zugehörige Eigenwert. Ihre wichtigste Eigenschaft ist die Orthonormalitätsrelation: Z 0 = δll0 δmm0 dΩ Ylm Ylm 0 13 Dies bedeutet, dass man ähnlich einer Fourierreihe, jede Winkelfunktion durch eine unendliche Reihe von Kugeflächenfunktionen darstellen kann (jede Winkelfunktion, die den Winkelanteil der Laplace-Gleichung löst natürlich). In der Praxis weiss man oft, wie das Ergebnis aussehen soll und kann dementsprechend 99,99% aller Kugelflächenfunktionen verwerfen. Der Radialanteil hat auch eine allgemeine Lösung, auf die man vielleicht nicht direkt kommt. R(r) = Al rl + Bl rl+1 Im allgemeinen ist eine Lösung dann eine Summe über all l und m. Φ(~r) = ∞ X l X l=0 m=−l Al r l + Bl rl+1 Ylm Diese muss dann an die jeweiligen Randbedingungen angepasst werden. 2.11 Die Energie einer Ladungsverteilung Die Energie einer kontinuierlichen Ladungsverteilung berechnet man mit Z 1 ρΦd3 r W = 2 Oder mit Hilfe von Gleichung (1) und dem Gausschen Satz auch ausgedrückt als Z 0 W = E 2 d3 r 2 Diese Energie steckt im Feld einer Ladungsverteilung, oder auch in der Ladungsverteilung selbst, d.h. ist die Arbeit, die benötigt wird, um diese Ladungsverteilung zu schaffen. Vorsicht bei Punktladungen: Wendet man diese Formeln auf eine diskrete Ladungsverteilungen aus Delta-Funktionen an, so erhält man unendlich! Dies ist ein kleines philosophisches Problem, mehr dazu im Griffiths, S.91-96, unter anderem auch die genaue Herleitung dieser Formeln. Die Energie in einem Kondensator kann man damit folgendermaßen berechnen: Auf beiden Platten sitzt die Ladung Q = ∆Φ · C. Setzt man oBdA das Potential auf der ersten Platte Φ1 = 0, so ist das Potential auf der zweiten Platte genau ∆Φ. Nimmt man dann obige Gleichung über die Energie in einem elektrischen Feld, erhält man W = 1 Q(∆Φ)2 2 14 3 Elektrische Felder im Medium Materie besteht aus Atomen oder Molekülen, die wiederum positive Ladungen (Protonen) und negative Ladungen (Elektronen) enthalten. Da diese Ladungen nicht am gleichen Ort sitzen, besitzen Atome oder Moleküle Dipolmomente. Ein Elementardipol“ besteht aus einer positiven Ladung q und einer negativen −q ” mit dem Distanzvektor d~ zwischen den beiden Ladungen. Das Elementardipolmoment ist dann definiert als p~ = d~ · q Atome sind normalerweise von außen gesehen neutral geladen. Legt man nun ~ an werden die Elektronen und Protonen aber ein äußeres elektrisches Feld E entgegengesetzt auseinandergezogen: das Atom wird polarisiert, es bekommt ein Dipolmoment. Ein Dipol erzeugt wiederum ein elektrisches Feld, das sich so ausrichtet, dass es dem äußeren Feld entgegenwirkt. Materie im elektrischen Feld verändert also das elektrische Feld, und man nennt diese Materie Dielektrikum. 3.1 Polarisation Man definiert sich eine Größe, die einem die makroskopischen Eigenschaften des Material im E-Feld wiedergibt. Die Polarisation P~ ist quasi die Dipoldichte pro Volumen des Dielektrikums. Wenn ein Material polarisiert wird, wird letzlich eine Volumen- und eine Oberflächenladung erzeugt. Klar wird das mit, wenn man sich eine Reihe von gleich ausgerichteten Dipolen vorstellt: in der Mitte eliminieren sich die Ladungen quasi gegenseitig, sodass nur die zwei Ladungen am Anfang und am Ende der Reihe netto übrigblieben. Das Bild veranschaulicht nur die Enstehung einer Oberflächenladung. In Wirklichkeit kann die Situation viel komplizierter sein und auch eine Volumenladung entstehen. Genaue Herleitung ergibt (siehe Griffiths, S.166-171), dass die ge” bundene“ Ladung ρb , die durch Polarisierung entsteht durch die Divergenz der Polarisation gegeben ist: −∇ · P~ = ρb Die Oberflächenladung am Rand des Dielektrikums ergibt sich damit (infinitesimale Gauss’sche Box + Gauss’scher Satz) als σb = P~ · n̂ 15 3.2 Der Gauss’sche Satz im Dielektrikum Bei Präsenz von dielektrischem Material hat man also eine Insgesamtladung von ρ = ρb + ρf die sich aus gebundener Ladung ρb und freier ( normaler“) Ladung ρf zusam” mensetzt. Also kann man Gleichung (1) umschreiben zu ~ = ρ = ρb + ρf = −∇ · P~ + ρf 0 ∇ · E ~ + P~ ) = ρf ⇒ ∇ · (0 E ~ als Man definiert sich die elektrische Ladungsverschiebung D ~ = 0 E ~ + P~ D Damit liest sich das Gaussche Gesetz (1) in bekannter Form als ~ = ρf ∇·D (4) Anordnungen von Dielektrika, die eine gewisse Symmetrie besitzen, kann man mithilfe dieser Gleichung nun wieder auf bekanntem Wege über den Gauss’schen Satz lösen. Die Ähnlichkeit der Gleichung (4) mit Gleichung (1) verleitet einen dazu, leicht ~ und D ~ wären fast dasselbe. Rechnet man jedoch mal die Rotation zu denken E ~ aus von D ~ = 0 (∇ × E) ~ + (∇ × P~ ) = ∇ × P~ ∇×D ~ nicht unbedingt rotationsfrei ist, da es erstmal keinen so sieht man, dass D ~ muss als nicht unbedingt ein Grund gibt anzunehmen, P~ wäre rotationsfrei. D erzeugendes Potential besitzen, was ein gravierender Unterschied zum E-Feld ist. 3.3 Lineare Dielektrika ~ und D ~ verstanden zu haben ist Den grundsätzlichen Unterschied zwischen E ~ eben doch rotawichtig, auch wenn es im praktischen Fall so aussieht, dass D tionsfrei ist. Wir sprechen nämlich eigentlich nur über lineare Dielektrika, d.h. Dielektrika wo gilt ~ P~ = 0 χe E also die Polarisation proportional zum E-Feld ist. Im allgemeinen muss dies ja nicht so sein, im allgemeinen ist χe nämlich ein Tensor, die Polarisastion also richtungsabhängig vom E-Feld. Im linearen Fall gilt jedoch also ~ = 0 E ~ + P~ = 0 E ~ + 0 χ e E ~ = 0 (1 + χe )E ~ D ~ = 0 r E 16 mit r = 1 + χe als dielektrische Konstante des Materials. ~ proportional zu E ~ ist bedeutet dies logischerweise, dass D ~ auch Wenn nun D rotationsfrei sein muss - ABER nur innerhalb des Dielektrikums. Am Rand gilt dies nicht mehr, da hier ja auch die Proportionalität zum E-Feld endet. Fazit: Betrachtet man den Bereich innerhalb eines Dielektrikum, so hat man im Prinzip die gleiche Mathematik wie bei der Elektrostatik im Vakuum, mit dem einzigen Unterscheid, dass die Dielektrezitätskonstante zu 0 → 0 r übergeht. Insbesondere, dass hier wieder die Laplace-Gleichung gilt. Befindet man sich am Rand des Dielektrikums, so müssen bestimmte Randbedingungen beachtet werden. 3.4 Bedingungen am Rand des Dielektrikums Mit der gleichen Argumentation wie beim Leiter legt man eine infinitesimale Gauss’sche Box um den Rand des Dielektrikums und integriert über Gleichung (4): Z Z ~ · n̂ da ~ d3 r = D ∇·D V ∂V ⊥ ⊥ ⇒ Doben − Dunten = σf Die Differenz der senkrechten Komponenten der elektrischen Verschiebungsdichte ist gleich der Oberflächenladung des Dielektrikums. Dies kann man auch ausdrücken als 0 ∂Φunten ∂Φoben − 0 r = σf ∂n ∂n Falls das Dielektrikum nicht geladen ist, ist σf = 0, da es ja die Dichte der ~ nur eine freien“ Ladungsträger ist. Diese Gleichung bedeutet aber nicht, dass D ” senkrechte Komponente auf die Oberfläche hat, es stellt lediglich eine Beziehung zwischen den Bereichen über und unter der Grenzfläche her. 3.5 Energie in dielektrischen Systemen Betrachtet man einen Kondensator, der vollständig mit Dielektrikum gefüllt ist, so berechnet sich seine Kapazität zu C = r Cvac also das r -fache der Kapazität im Vakuum. Die im Kondensator (oder im E-Feld im Kondensator) gespeicherte Energie erhöht sich daher um denselben Faktor. Daher ist es konsequent anzunehmen, dass sich auch die Energie des E-Feldes im Kondensator um den Faktor r erhöht, wenn ein Dielektrikum im Spiel ist. 17 Also frei nach der Formel für die Energie des E-Feldes Z Z 0 1 2 3 ~ ·E ~ d3 r W = r E d r= (0 r E) 2 2 Z 1 ~ ~ 3 D·Ed r = 2 Es stellt sich heraus, dass diese Formel sogar allgemein stimmt, wenn man eine formell richtige Herleitung macht (siehe Griffiths, S. 191-192). 18 Formelsammlung Nabla-Operator – Wikipedia Seite 1 Formelsammlung Nabla-Operator aus Wikipedia, der freien Enzyklopädie Dieser Artikel ist eine Formelsammlung zum Thema Nabla-Operator. Es werden mathematische Symbole verwendet, die im Artikel Mathematische Symbole erläutert werden. Dies ist eine Liste von einigen Formeln der Vektoranalysis im Zusammenhang mit gebräuchlichen Koordinatensystemen. Dabei bezeichnen die Einheitsvektoren in den jeweiligen Koordinatenrichtungen; atan2 ist der Arkustangens mit zwei Argumenten. Tabelle mit Nabla-Operator in Zylinder und Kugelkoordinaten Operation Kartesische Koordinaten (x,y,z) Zylinderkoordinaten (ρ,φ,z) Kugelkoordinaten (r,θ,φ) Definition der Koordinaten infinitesimale Verschiebung infinitesimales Flächenelemen t infinitesimales Volumeneleme nt Nichttriviale Rechenregeln: 1. 2. 3. 4. 5. 6. (Laplace-Operator) woraus mit unmittelbar die für die Strömungslehre wichtige Weber-Transformation folgt: 7. 8. http://de.wikipedia.org/wiki/Formelsammlung_Nabla-Operator 12.03.2010 19:45:08