1 Einleitung: Die inverse Streutheorie
Werbung

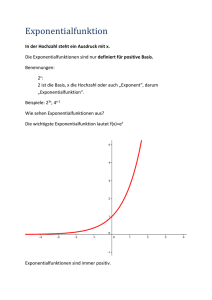
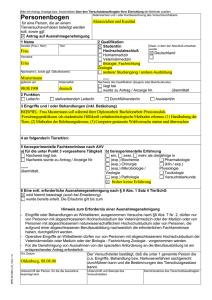
1 Einleitung: Die inverse Streutheorie 1.1 Vorüberlegung: Die Fourier-Transformation zur Lösung linearer partieller Differentialgleichungen Fourier-Transformationen eignen sich zur Lösung linearer partieller Differentialgleichungen. Aus einer Anfangsbedingung φ(x, t0 ) einer Differentialgleichung soll das Feld φ(x, t1 ) zu einem späteren Zeitpunkt berechnet werden. Das geschieht in drei Schritten (siehe Abbildung): 1. Fourier-Transformation der Anfangsbedingungen φ(x, t0 ) 2. Zeitentwicklung der Fouriermoden ck (t0 ) → ck (t1 ) 3. Rücktransformation auf φ(x, t1 ) Der Vorteil dieses Verfahrens liegt darin, dass die Fouriermoden einfachen gewöhnlichen Differentialgleichungen gehorchen. Auf diese Weise wird die direkte Lösung der partiellen Differentialgleichung (Schritt 4 in der Abbildung) umgangen. Beispiel Eindimensionale Diffusionsgleichung φt − φxx = 0: 1. Fouriertransformation ck (t0 ) = √1 2π R∞ −∞ 2. Die Bewegungsgleichung der Moden ck (t1 ) = ck (t0 ) exp(−k 2 (t1 − t0 )) 3. φ(x, t1 ) = √1 2π R∞ φ(x, t0 ) exp(−ikx)dx d c dt k = −k 2 ck wird gelöst durch −∞ ck (t1 ) exp(ikx)dk Leider führt die Fourier-Transformation bei nichtlinearen partiellen Differentialgleichungen zu keiner Vereinfachung. Die Bewegungsgleichung in Schritt 2 enthält dann nichtlineare Anteile, die die Bewegungsgleichungen für unterschiedliche k miteinander koppeln. Im Allgemeinen wird der nichtlineare Anteil so kompliziert, dass sich die Bewegungsgleichungen für die Fouriermoden nicht lösen lassen. 1 Feld 4. Zeitentwicklung der linearen Differentialgleichung φ (x,t0 ) φ (x,t ) 1 1. Fourier− transformation Fouriermoden c (t ) k 0 Feld 3. inverse Fourier− transformation 2. Zeitentwicklung der Fouriermoden 2 Fouriermoden c (t ) k 1 1.2 Die inverse Streutheorie in Analogie zur FourierMethode Die inverse Streutheorie (A.C. Scott, F.Y.Chu, D.W. McLaughlin, Proceedings of the IEEE 61, 1443 (1973)) erlaubt es, bestimmte nichtlineare par∂ φ(x, t) = K(φ(x, t)) analytisch zu lösen. Vortielle Differentialgleichungen ∂t aussetzung für die Anwendung dieser Methode ist eine besondere Struktur der Bewegungsgleichung, die der Existenz eines Lax-Paares entspricht. Beispiele sind die Korteweg-de-Vries-Gleichung, die nichtlineare SchrördingerGleichung und die Sinus-Gordon-Gleichung. Bei dieser Methode wird die nichtlineare partielle Differentialgleichung auf lineare Differentialgleichungen transformiert, deren Bewegungsgleichung einfach zu lösen ist. Die wesentliche Schwierigkeit besteht im Auffinden dieser linearen Gleichungen. Ihren Namen hat diese Methode von der Analogie zu kernphysikalischen Streuproblemen: Die physikalische Größe φ(x, t) in der ursprünglichen partiellen Differentialgleichung wird als ein Streupotential aufgefasst. Das Streupotential φ(x, t) ändert sich zeitlich entsprechend der nichtlinearen partiellen Differentialgleichung. Dieses Potential wirkt auf einfallende Wellen ψ(x, t). Diese Wellen stellen ein gedachtes Hilfsfeld dar (Schritt 1 in der Abbildung). In der Kernphysik bezeichnet φ(x) das Potential eines Atomkerns, und ψ beschreibt die Wellenfunktion von einfallenden Elektronen. Für ψ(x, t) lassen sich Bewegungsgleichungen aufstellen und in der Zeit entwickeln. Es ist dabei ausreichend, das Lösungsverhalten von ψ(x, t) für |x| → ∞ zu kennen. So erhält man die Streudaten ψ(x, t1 ) aus den Streudaten ψ(x, t0 ) zu einer früheren Zeit (Schritt 2). Aus dieser Lösung läßt sich die Lösung φ(x, t1 ) explizit berechnen (Schritt 3). Auf diesem Umweg lässt sich die nichtlineare partielle Differentalgleichung lösen (Schritt 4). Die inverse Transformation erfordert die Lösung einer linearen Integralgleichung (Gelfand-Levitan-Marchenko-Gleichung). Die Lösung der partiellen Differentialgleichung mit der inversen Streutheorie erfordert somit drei Schritte: 1. Formulierung des Streuproblems durch das Lax-Paar 2. Zeitentwicklung der Streudaten durch Lösung der Bewegungsgleichung von ψ(x, t) für |x| → ∞ 3. Rekonstruktion des Streupotentials φ(x, t1 ) aus den Streudaten mit Hil3 Streupotential 4. Zeitentwicklung der nichtlinearen Differentialgleichung φ (x,t0 ) φ (x,t ) 1 1. direktes Streuproblem 3. inverses Streuproblem Streudaten Streudaten ψ (x,t0 ) Streupotential 2. Zeitentwicklung der Streudaten fe der Gelfand-Levitan-Marchenko-Gleichung 4 ψ (x,t ) 1 2 Das Lax-Paar Ein Lax-Paar (P.D. Lax, Communication on Pure and Applied Mathemetics, 21, 467 (1968)) ist ein Paar von Operatoren L und B, durch das eine partielle Differentialgleichung ∂ φ(x, t) = K(φ(x, t)) (1) ∂t dargestellt werden kann. Der Operator L hängt dabei von der Lösung φ(x, t) der partiellen Differentialgleichung ab. B ist ein selbstadjungierter Operator. (1) entspricht der Differentialgleichung iLt = BL − LB (2) für den Operator L. Zur Vereinfachung wird die Abhängigkeit der Operatoren von x und t im Folgenden nicht immer aufgeschrieben. Beispiel 1: L=− ∂2 + φ(x, t) ∂x2 (3) (Schrödinger-Operator) B=i ∂ ∂x 3 3 ∂ ∂ ∂ ∂ ergibt Lt = φt , BL − LB = −i ∂x 3 + iφx + iφ ∂x + i ∂x3 − iφ ∂x = iφx . Der Lax-Gleichung entspricht also die einfache partielle Differentialgleichung φt = φx Beispiel 2: ∂3 ∂ ∂ + 3i(φ + φ) (4) 3 ∂x ∂x ∂x L ist wieder der Schrödinger-Operator (3). Daraus folgt BL−LB = i(6φφx − φxxx ), und für (1) ergibt sicht die Korteweg-de-Vries-Gleichung φt = 6φφx − φxxx ). Die Transformation u(x, t) = −φ(x, t) führt auf die Form der Kortewegde-Vries-Gleichung ut + 6uux + uxxx = 0. B = −4i 5 Die Zeitentwicklung von L(t) kann durch den Evolutionsoperator U(t) dargestellt werden: L(t) = U(t)L(0)U † (t) (5) U ist ein unitärer Operator, es gilt also U † U = UU † = I, wobei I der Einheitsoperator ist. Ferner gilt U(t = 0) = I. Der Ausdruck U(t)−† L(t)U(t) = L(0) (6) ist zeitunabhängig. Differenziert man (6) nach der Zeit, so folgt −U † Ut U † LU + U † Lt U + U † LUt = 0 (7) Die zeitliche Entwicklung von U kann mit Hilfe eines selbstadjungierten Operators B durch die Differentialgleichung iUt = BU (8) beschrieben werden. Setzt man (8) in die Bedingung (7) ein und multipliziert von links mit U und von rechts mit U † , so ergibt sich iBL + Lt − iLB = 0, was der Operatorgleichung (2) entspricht. Die Existenz eines Lax-Paares ist eine Eigenschaft, die nur wenige partielle Differentialgleichungen besitzen. Bekannte Beispiele sind die Kortewegde-Vries-Gleichung, die nichtlineare Schrödinger-Gleichung und die SinusGordon-Gleichung. 6 3 Das Streuproblem Die Eigenwertgleichung Lψ = Eψ für den Operator L aus (3) −ψxx (x, t) + φ(x, t)ψ(x, t) = Eψ(x, t) (9) entspricht der linearen Schrödinger-Gleichung für eine Wellenfunktion ψ in einem Potential φ. In Streuproblemen in der Quantenmechanik ist φ das Potential eines Atomkerns, ψ ist die Wellenfunktion einfallender Elektronen. Es wird nun angenommen, dass φ(x, t) lokalisiert ist, also φ(x, t) und seine Ableitungen für |x| → ∞ verschwinden. Ziel ist es nun, aus φ(x, t) aus φ(x, 0) zu berechnen. Zu diesem Zweck werden Bewegungsgleichungen für ψ abgeleitet und gelöst. Es ist dabei ausreichend, ψ(x, t) für |x| → ∞, also fern des Streupotentials zu kennen. Aus diesen Streudaten kann dann φ(x, t) berechnet werden. Die Schrödinger-Gleichung (9) besitzt eine endliche Zahl gebundener Zustände mit negativen Eigenwerten E = −κ2n < 0 und ein kontinuierliches Spektrum von positiven Eigenwerten E = k 2 > 0 7 3.1 Gebundene Zustände ψn (x, t = 0) ist eine Eigenfunktion zum Operator L(t = 0) mit dem negativen reellen Eigenwert −κ2n , κn > 0: L(t = 0)ψn (x, t = 0) = −κ2n ψn (x, t = 0) (10) Die Funktion ψn (x, t) = U(t)ψn (x, t = 0) ist die Eigenfunktion zum Operator L(t) = U(t)L(0)U † (t) zu einem späteren Zeitpunkt mit dem gleichen Eigenwert −κ2n : L(t)ψ(x, t) = = = = U(t)L(0)U † (t)U(t)ψn (x, t = 0) U(t)L(0)ψn (x, t = 0) −κ2n U(t)ψn (x, t = 0) −κ2n ψn (x, t) (11) Der Eigenwert −κ2n hängt also nicht von der Zeit ab. Jedem gebundenen Zustand ψn (x, t) entspricht ein zeitunabhängiger Eigenwert. Dieser Eigenwert ist ein Funktional des Potentials φ(x, t) im Operator L(t). Somit sind die Eigenwerte Konstanten der Bewegung. Nun kann eine partielle Differentialgleichung für die Zeitentwicklung der gebundenen Zustände ψn (x, t) gegeben werden. Differenziation von ψn (x, t) = U(t)ψn (x, 0) nach der Zeit ergibt ψ̇n (x, t) = −iB(t)U(t)ψn (x, 0), oder iψ̇n (x, t) = Bψn (x, t) 8 (12) Beispiel: Für die Korteweg-de-Vries-Gleichung (C.S. Gardner, J.M. Greene, M.D. Kruskal, R.M. Miura, Phys. Rev. Lett. 19, 1095 (1967)) wird eine Lösung φ(x, t) angenommen, die für x → −∞ verschwindet. Dann können die Operatoren ∂3 ∂2 B (4) und L (3) dargestellt werden als B ≈ −4i ∂x 3 und L ≈ − ∂x2 , weil φ und φx für |x| → ∞ verschwinden. Die Ortsabhängigkeit ψ für |x| groß folgt aus ∂2 ψn (x, t) = κ2n ψn (x, t) ∂x2 als ψ(x) ∼ exp(κn x) oder als ψ(x) ∼ exp(−κn x). Wenn die Normierbarkeit R∞ 2 −∞ |ψ(x)| dx = 1 gefordert wird, dann muß die Funktion exponentiell abfal− len als ψ(x, t) = c+ n (t) exp(−κn x) für x → ∞ und als ψ(x, t) = cn (t) exp(κn x) für x → −∞. Die Zeitabhängigkeit für c+ n (t) bei x → ∞ folgt mit (12) ψ̇n (x, t) = 4κ3n ψn (x, t) 3 als ψn (x, t) = c+ n (0) exp(−κn x + 4κn t), also + 3 c+ n (t) = cn (0) exp(4κn t) (13) Die Funktion ψ steigt exponentiell in der Zeit an. Ähnlich folgt ψn (x, t) = 3 c− n (0) exp(κn x − 4κn t) für x → −∞. Hier fällt die Funktion exponentiell in der Zeit ab. 9 3.2 Gestreute Wellen Neben den gebundenen Lösungen existieren auch Eigenzustände mit positiven Eigenwerten E = k 2 > 0. Für einen Schrödinger-Operator (3) mit einem lokalisierten Potential φ(x) → 0 für |x| → ∞ kann das asymptotische Verhalten der Eigenzustände berechnet werden. Weil das Potential hier verschwindet, lautet die Schrödinger-Gleichung − ∂2 ψ(x, t) = k 2 ψ(x, t) ∂x2 Diese Gleichung wird allgemein gelöst durch die Wellen ψk (x, t) ≈ a+ (k, t) exp(ikx) + a− (k, t) exp(−ikx) Die zeitliche Evolution von a(k, t) kann wieder aus (12) berechnet werden. Um eine Information über das Streupotential zu erhalten, werden die Randbedingungen eingeschränkt auf eine einfallende und eine reflektierte Welle für x → −∞ ψk (x, t) ∼ exp(ikx) + ρ(k, t) exp(−ikx) und eine transmittierte Welle für x → ∞ ψk (x, t) ∼ τ (k, t) exp(ikx) ρ(k, t) ist der Reflexionskoeffizient und τ (k, t) ist der Transmissionskoeffizient. 10 Beispiel: Für die Korteweg-de-Vries-Gleichung folgt für |x| → ∞ die Lösungen von (3) und (12) ψk (x, t) = a− (0) exp(−4ik 3 t) exp(−ikx) und ψk (x, t) = a+ (0) exp(4ik 3 t) exp(ikx) Der Reflexionskoeffizient ergibt sich aus dem Phasenverhältnis ρ ∼ a+ /a− für x → −∞ als ρ(k, t) = ρ(k, t = 0) exp(8ik 3 t) (14) 11 4 Rücktransformation: Gelfand-Levitan-MarchenkoGleichung Die Streudaten c(t), κ und ρ(t) enthalten bereits die Information über die Lösung der nichtlinearen partiellen Differentialgleichung (1). Die Lösung φ(x, t) kann mit Hilfe der Gelfand-Levitan-Marchenko-Gleichung G(x, y, t) + F (x + y, t) + Z ∞ x G(x, z, t)F (y + z, t)dz = 0 aus den Streudaten zur Zeit t berechnet werden. Diese Integralgleichung ist linear in G. Dabei gehen der Reflexionskoeffizient ρ(k, t) und die Koeffizienten der gebundenen Zustände c+ n (t) in F (z, t) = 1 2π Z ∞ −∞ ρ(k, t) exp(ikz)dk + N X 2 c+ n (t) exp(−κn z) n=1 ein. Die Lösung folgt aus φ(x, t) = −2 d G(x, x, t) dx 12 (15) Beispiel: Als einfachster Fall wird für die Korteweg-de-Vries-Gleichung eine Lösung angenommen, die nur einen gebundenen Zustand mit einem Eigenwert E = −κ2 besitzt. Dieses Potential soll die besondere Eigenschaft besitzen, dass der Reflexionskoeffizient verschwindet ρ(k, 0) = 0. Die Gelfand-Levitan-Marchenko-Gleichung lautet dann 2 2 8κ3 t −κ(x+y) 8κ3 t G(x, y, t)+c+ e +c+ n (0)e n (0)e Z Differenziert man (16) nach y, so ergibt sich Lösung von (16) muß deshalb die Form ∞ x e−κ(y+z) G(x, z, t)dz = 0 (16) ∂ G(x, y, t) ∂y = −κG(x, y, t). Die G(x, y, t) = e−κy h(x, t) (17) haben. Damit läßt sich das Integral in (16) explizit ausführen. Auflösen nach G ergibt 2 3 2κc+ n (0) exp(8κ t − κ(x + y)) G(x, y, t) = − 2 3 2κ + c+ n (0) exp(8κ t − 2κx) und mit (15) φ(x, t) = −2κ2 cosh−2 (κ(x − 4κ2 t) − δ) 2 2 δ = 21 ln(c+ n (0)/2κ). Mit u(x, t) = −φ(x, t) und v = 2κ ist das die Einsolitonenlösung der KdV-Gleichung. In der gleichen Weise lassen sich kompliziertere Lösungen konstruieren. Zum Beispiel ergibt sich die Zweisolitonenlösung aus einem reflexionsfreien Potential mit zwei gebundenen Zuständen. 13 5 Methode von Ablowitz, Kaup, Newell und Segur (AKNS) Das Auffinden einer Lax-Paares ist eine wesentliche Schwierigkeit bei der Anwendung der Inversen Streumethode. Die AKNS-Methode (M. Ablowitz, D.J. Kaup, A.C. Newell, H. Segur, Phys. Rev. Lett. 31, 125 (1973)) erlaubt das Auffinden von Lax-Paaren für mehrere wichtige partielle Differentialgleichungen. Als Ansatz werden allgemeine Operatoren L= und B= d −iq(x, t) i dx d ir(x, t) −i dx ! a(x, t, E) b(x, t, E) c(x, t, E) −a(x, t, E) (18) ! (19) eingeführt. q(x, t), r(x, t) und a(x, t, E), b(x, t, E), c(x, t, E) sind zunächst noch nicht festgelegte Funktionen. E ist der zeitunabhängige Eigenwet des Lax-Operators Lv = Ev. (20) Der Eigenvektor v = (v1 , v2 ) folgt der Evolutionsgleichung ivt = Bv. (21) Die Funktionen a, b, c, q, r lassen sich nicht völlig frei wählen, sondern unterliegen Konsistenzbedingungen: Differenziert man (18) nach t und (19) nach x, so folgt als Konsistenzbedingung der gemischten Ableitungen ax = qc − rb bx + 2iEb = iqt − 2aq cx − 2iEc = irt + 2ar (22) Weitere Einschränkungen dieser Funktionen legen die betreffende partielle Differentialgleichung fest. Beispiel: Korteweg-de-Vries-Gleichung Die Wahl a = 4E 2 + 2qrE + irqx − iqrx 14 liefert die Bedingungen (22) die Gleichungen qt − 6rqqx + qxxx = 0 rt − 6rqrx + rxxx = 0 Die zusätzliche Einschränkung r = −1 liefert die KdV-Gleichung. Beispiel: Sinus-Gordon-Gleichung Die Wahl a = −(4E)−1 cos φ und r = −q = φx /2 liefert die Sinus-GordonGleichung in der Form φxt = sin φ (siehe Bäcklund-Transformation). Ersetzt man sin durch sinh, so erhält man die sinh-Gordon-Gleichung. Beispiel: Nichtlineare Schrödinger-Gleichung Die Wahl a = 2E 2 + rq liefert iqt + qxx − 2q 2 r = 0 irt − rxx + 2q 2 r = 0 Mit r = q ∗ führt das auf die nichtlineare Schrödinger-Gleichung. 15 6 Integrabilität der Bewegungsgleichungen Bewegungsgleichungen wie die Korteweg-de-Vries-Gleichung, die nichtlineare Schrödingergleichung und die Sinus-Gordon-Gleichung besitzen zwei außergewöhnliche Eigenschaften: Sie sind von einer Hamilton-Funktion ableitbar, und sie besitzen eine unendliche Zahl von Erhaltungsgrößen. Diese Bedingungen sind voraussetzungen für die Anwendung der inversen Streumethode. Auch das reguläre Verhalten von Solitonen (zwei Solitonen überstehen eine Kollision unverändert) ist eine Folge dieser Eigenschaften. 6.1 Hamiltonsche Struktur der Bewegungsgleichungen Im Fall der Korteweg-de-Vries-Gleichung kann diese Hamilton-Funktion dargestellt werden als H[P, Q] = − 1 2 1 ]dx [Q3 (x) + Q2x (x) + Px3 (x) + Pxx 2 2 −∞ Z ∞ (23) P (x) und Q(x) sind kanonisch konjugierte Koordinaten. Die Hamiltonschen Bewegungsgleichungen sind δH dP =− = 3Q2 − Qxx dt δQ (24) and dQ δH = = −Pxxxx + 6Px Pxx (25) dt δP Rx Diese Gleichungen werden durch Q = −u(x, t) und P = − −∞ u(x̃, t)dx̃ gelöst, wenn u(x, t) der Korteweg-de-Vries-Gleichung genügt. Die Kortewegde-Vries-Gleichung ist konservativ, d.h. die Hamilton-Funktion bleibt in der Zeit konstant. Eine willkürliche Veränderung der Bewegungsgleichung (zum Beispiel ut + 6uux + uxxx = f (u, ux, uxxx )) wird in den meisten Fällen die Hamiltonsche Struktur beseitigen. 6.2 Erhaltungsgrößen Die oben genannten Bewegungsgleichungen haben die bemerkenswerte Eigenschaft, dass neben der Hamilton-Funktion eine unendliche Zahl weiterer Erhaltungsgrößen existiert. Die drei einfachsten Erhaltungsgrößen der 16 Korteweg-de-Vries-Gleichung lauten Z I1 [u] = I2 [u] = ∞ udx, (26) 1 2 u dx, 2 (27) −∞ Z ∞ −∞ 1 (u3 − u2x )dx, (28) 2 −∞ wobei das letzte Integral der Hamilton-Funktion entspricht. Die Existenz unendlich vieler Erhaltungsgrößen (Integrabilität) ist eine sehr untypische Eigenschaft von nichtlinearen partiellen Differentialgleichungen. Hinzufügen eines weiteren Terms in die Bewegungsgleichung wird im Allgemeinen die meisten Erhaltungsgrößen zerstören, selbst wenn die veränderte Gleichung ebenfalls eine Hamiltonsche Struktur besitzt. Eine solche Veränderung der Bewegungsgleichungen kann dazu führen, dass Solitonen bei Kollisionen ihre Form und Größe ändern. Die inverse Streumethode kann als eine kanonische Transformation der Ortsund Impulskoordinaten pi (P, Q), qi (P, Q) interpretiert werden (V.E. Zakharov, L.D. Faddeev, Funct. Anal. Appl.5, 280 (1972)). Die einzelnen Ortsund Impulskoordinaten sind Funktionen der Streudaten. Die neue HamiltonFunktion H̃(pi ) hängt nur von den Impulskoordinaten, nicht aber von den Impulskoordinaten ab. Nach den Bewegungsgleichungen (24) und (25) ist pi dann zeitlich konstant und qi wächst linear in der Zeit an. Die Impulse sind also wieder Erhaltungsgrößen. I3 [u] = Z ∞ 17 7 Bäcklund-Transformation Bäcklund-Transformationen setzen eine spezielle Lösung einer partiellen Differentialgleichung in Beziehung zu einer Lösung einer anderen partiellen Differentalgleichung. Die Transformation selbst wird ebenfalls als partielle Differentialgleichung dargestellt. Auto-Bäcklund-Transformationen verbinden zwei verschiedene Lösungen der selben partiellen Differentialgleichung. Auf diese Weise lassen zunehmend komplizierte Lösungen einer Bewegungsgleichung konstruieren. Beispiel Die KdV-Gleichung ut + uxxx + 6uux = 0 kann mit der Potential-Funktion w(x, t) mit u = −wx geschrieben werden als wt = 3wx2 − wxxx (29) Ist eine spezielle Lösung w dieser Gleichung bekannt, so folgt aus der BäcklundTransformation w̃x + wx = −k 2 + (w̃ − w)2 /2 (30) w̃t + wt = 2(2k 2 ũ + u2 − u(w̃ − w)2 − ux (w̃ − w)) eine neue spezielle Lösung w̃ von (29) oder ũ = −w̃x als Lösung der KdVGleichung. k ist dabei ein beliebiger Parameter. Speziell führt der VakuumZustand u = w = 0 auf deine Lösung mit einem Soliton. Jede weitere Transformation erhöht die Zahl der Solitonen um eins. Daraus lassen sich beliebige N-Solitonen-Lösungen konstruieren (H.D. Wahlquist, F.B. Estabrook, Phys. Rev. Lett. 31, 1386 (1973)). Beispiel 2 2 Die Sinus-Gordon-Gleichung ∂∂xu2 − ∂∂xu2 = sin u kann durch die Transforma∂2u tion X = (x + t)/2 und T = (x − t)/2 auf die Form ∂X∂T = sin u gebracht werden. Ist u(x, t) eine bekannte Lösung der Sinus-Gordon-Gleichung, dann kann eine weitere Lösung v(x, t) durch lösen der Differentialgleichungen vX − uX = 2a sin( u+v ) 2 2 u−v vT + uT = a sin( 2 ) berechnet werden. 18 (31) 8 Hirota-Methode Die Hirota-Methode (R. Hirota, Phys. Rev. Lett. 27, 1192 (1971)) ermöglicht die Konstruktion von Lösungen bestimmter partieller Differentialgleichungen. Durch die Transformation u(x, t) = 2 ∂2 ln f (x, t) ∂x2 lässt sich die KdV-Gleichung ut + uxxx + 6uux = 0 in der reduzierten Form ∂ 2 (fxxxx f − 4fxxx fx + 3fxx + fxt f − fx ft ) = 0 (32) ∂x darstellen. Die Gleichung (32) sieht zwar noch komplizierter aus als die KdVGleichung, hat aber den Vorteil, dass für jede Lösung f (x, t) die Funktion h(t)f (x, t) ebenfalls eine Lösung ist. (32) lässt sich einfach durch Summen von Exponentialfunktionen lösen. Mit dem Ansatz f = 1 + exp(kx − k 3 t + const.) erhält man die Solitonen-Lösung u= k2 2 cosh2 (kx − k 3 t + const) In ähnlicher Weise lassen sich mit dem Ansatz f = 1 + exp(α1 ) + exp(α2 ) + a12 exp(α1 + α2 ) mit αi = ki x − ki3 t + const, a12 = ((k1 − k2 )/(k1 + k2 ))2 zwei Solitonen konstruieren. Dieses Verfahren lässt sich für beliebig viele Solitonen fortsetzen. Die Gleichung (32) kann kompakt mit Hilfe des bilinearen Ableitungsoperators ∂n Dxn f · g := n f (x + h)g(x − h)|h=0 ∂h aufgeschrieben werden. Der Ausdruck in Klammer in Gleichung (32) ist in dieser Schreibweise (Dx4 + Dx Dt )f · f . Für (Dx4 + Dx Dt )f · f = 0 ist (32) erfüllt. Im Allgemeinen lassen sich auf diese Weise integrable Gleichungen der bilinearen Form G(D)f · f = 0 lösen. 19