Die Berechnung freier Schwingungen nach der Maxwellschen Theorie
Werbung

B A N D 7a
HEFT 5
ZEITSCHRIFT FÜR NATURFORSCHUNG
Die Berechnung freier Schwingungen nach der Maxwellschen Theorie
V o n EBERHARD KLEIN und ERNST
JENCKEL
Aus dem Institut für theoretische Hüttenkunde und physikalische Chemie
der Technischen Hochschule Aachen
(Z. Naturforschg. 7 a, 305-313 [1952]; eingegangen am 12. November 1951)
Es werden die Differentialgleichungen für die freie Schwingung verschiedener Maxwellscher Körper abgeleitet; die Lösungen dieser Differentialgleichungen sowie das
logarithmische Dekrement werden angegeben. Die Berechnung freier Schwingungen
mit Hilfe eines komplexen ¿"-Moduls wird diskutiert.
Die theoretische Behandlung der Rückprallelastizität wird auf die freie Schwingung
Maxwellscher Körper zurückgeführt.
ei der Untersuchung des Verhaltens hochmolekularer Stoffe bei mechanischer Beanspruchung kommen vor allem drei experimentelle
Methoden zur Anwendung.
B
1. Der Entspannungsversuch, bei dem nach einmaliger, momentan erzeugter Verformung die
Spannungsrelaxation mit der Zeit gemessen wird.
2. Der Verformungsversuch, bei dem man die
Zunahme der Verformung mit der Zeit bei konstanter, momentan erzeugter Spannung bestimmt.
3. Der periodische Versuch. Man gibt bei erzwungenen Schwingungen eine der Größen, Spannung oder Verformung, vor und bestimmt die
andere als Funktion der Zeit. Ferner kann man
die Dämpfung einer einmal angeregten freien
Schwingung verfolgen.
Unter den verschiedenen Ansätzen zur mathematischen Behandlung dieser Experimente bewährten sich vor allen Dingen diejenigen, die die
Maxwellsche Vorstellung plastisch-elastischer K ö r per verwenden.
So sind Entspannung, Verformung und die erzwungenen Schwingungen mit Hilfe der Maxwellschen Theorie durchgerechnet 1 - 8 , wobei der Maxwellsche Ansatz durch Annahme mehrerer, in
einigen Spezialfällen auch unendlich vieler unterW . K u h n , Z. physik. Chem., Abt. B 42, 1 [1938].
E. J e n c k e l u . J. F ü h l e s , J. makromolekulare
Chem. 1, 203 [1943].
3 E. J e n c k e l u. G. K e l l e r , Das plastisch-elastische Verhalten hochmolekularer Stoffe (noch unveröffentlicht ).
4 G. T a m m a n n u. E. J e n c k e l , Z. anorg. allg.
Chem. 191, 122 [1930].
1
2
einander funktionell zusammenhängender Mechanismen weitgehend verbessert wurde.
Hierbei ist unter Mechanismus ein plastischelastischer Zusammenhalt verstanden, der der einfachen Maxwellschen Beziehung gehorcht.
Im folgenden werden die Schwingungsgleichungen verschiedener Maxwellscher Körper für freie
Schwingung abgeleitet; es wird ferner gezeigt, wie
man die Behandlung der Rückprallelastizität auf
diese Schwingungen zurückführen kann.
I. Ableitung einiger Grundgleichungen aus der
Maxwellschen Theorie
Entsprechend der Maxwellschen Vorstellung
kann man im einfachsten Falle (ein Mechanismus)
einen plastisch-elastischen Körper durch ein Federmodell nach A b b . 1 wiedergeben.
Bei Deformation in
Richtung durch eine zeitlich sich ändernde Kraft k findet man zu jeder Zeit
t eine Gesamtauslenkung x, die sich additiv aus
der Auslenkung xF der Feder F und der Verschiebung xK des Kolbens K zusammensetzt:
x = xF
xK .
Charakterisiert man die elastische Eigenschaft des
Systems durch einen E-Modul E, die plastische
5 E . J e n c k e l u . Ü b e r r e i t e r , Z . physik. Chem.,
Abt. A 182, 361 [1938].
5 F. H. M ü l l e r , Kolloid-Z. (Disk.-Tagung, Marburg 1950).
7 E. J e n c k e l , Kautschuk 1943, März-Heft.
8 W. H o l z m ü l l e r
u. E. J e n c k e l , Z. physik.
Chem., Abt. A 186, 359 [1940].
Unauthenticated
Download Date | 2/13/17 4:40 PM
Eigenschaft durch eine Relaxationszeit r, so lautet
die Maxwellsche Gleichung für die zeitliche Änderung der Spannung s:
ds
=
~dJ
E
dy
~dT
(I)
wobei y0 = x/l0 die Verformung bedeutet. Es erscheint für die weitere Betrachtung von Vorteil,
hieraus eine Gleichung für die Kraft k = qs abzuleiten (q — Querschnitt).
-T
Sind in einem Material mehrere Maxwellsche
Mechanismen gleichzeitig wirksam, so kann man
die mechanischen Eigenschaften eines beliebigen
Mechanismus i durch die Gleichungen charakterisieren :
^Ri +
= x,
1
xj = — J «»¡dt,
wenn man mit x Rl die reversible, mit xJt die irreversible und mit x die Gesamtdeformation des
Mechanismus i bezeichnet.
Ferner muß also gelten:
1 f
—1 J x R i d t = * Ä i + i
o
(IV)
1
f
+ —J*R
d* =
l + l o i+1
USW
-
II. Ableitung der Schwingungsgleichungen für verschiedene
Maxwellsche Modelle
1. E i n p l a s t i s c h - e l a s t i s c h e r M e c h a n i s m u s (Modell nach Abb. 1)
'///////////////
Abb. 1.
Es folgt also:
dk
~dt
1 dx
Man kann zu jedem beliebigen Zeitmoment die
Kräfteverhältnisse durch die Differentialgleichung
wiedergeben:
k
(II)
hierin ist qE/l0 = D die Direktionskraft der Feder.
Im betrachteten Modell ist nun zu jedem beliebigen Zeitpunkt die Kraft k ausdrückbar durch
die Federkraft, die auf den Kolben wirkt oder die
gleich große Gegenkraft kK, die im Kolben durch
Reibung erzeugt wird. Es folgt somit nach dem
Hookeschen Gesetz:
k — D xF = kK .
Mit der bereits abgeleiteten Beziehung x = x F +
x K wird somit aus (Gl. II):
D
oder
d a r F
d/
_ D
d , ,
'
F
dt
| D
d a ; K
dt
D
die Geschwindigkeit im Kolben ist proportional
der Auslenkung in der Feder, eine anschauliche
Form der Maxwellschen Gleichung. Nennt man
die von außen auf das System' einwirkende Kraft
- f k, so kann man also die allgemeine Kraftgleichung formulieren.
f
—
— DxF ,
die mit Hilfe der abgeleiteten Beziehungen
oder auch
und
x = xF + xK
X = ¿F + ¿K J
X = XF + XK
xK
XK
¿F
in der Form geschrieben werden kann
mxF + m
DXF = 0 .
(1)
Die Lösung dieser Diff.-Gl. für eine gedämpfte
Schwingung xF — cp (t) liefert nach
—
^K —
k = — DX = — DT XK .
mx
(III)
= xF -\ 1 f a?F d, t
T o
den gesuchten Ausdruck x = f(t). Man kann jedoch eine Diff.-Gleichung in x angeben, deren Lösung sofort x = f(t) liefert.
Führt man Gl. (1) über in eine Gleichung in a?K ,
so folgt:
x — xF - f
mx xK + mxK -f DTXk = 0;
Unauthenticated
Download Date | 2/13/17 4:40 PM
man addiert hierzu die differenzierte Gl. (1) und
erhält eine Gleichung in x:
m
(
+ K+ ~
..
( mxFi
mxF-\ m x..F 4- D xF
mx -\- — x + Dx
a;F =
X ~ ¿o> a?F
A
D1
ll 2
1
1
2
yyi #
_
+ — ¿fx + D1xFi +
==
..
a;F =
—
2
.
D2xFi = 0 .
D1
=0
=0.
^ .
D2
+ D 2 x F t + — XF>
Mit Hilfe der Anfangsbedingungen
a; = 0,
m
1
2
^K + D XK — 0
m X
t = 0; x = 0,
+j
1 ..
0,
xK = 0;
x0,
==
Xp
T
»F,
0.
Es gilt nun allgemein:
xF
xFl
x = xFi
Är.+ -r-[vgl.Gl.(IV)].
®)
X„
^F, + —
T
[s. a. Gl. (III)]
läßt sich diese Gleichung durch Integration reduzieren zu
. . m .
m .
m x + — x -f- Dx = -f- — rc0 .
(la)
(2 b)
Hiermit erhält man eine Gleichung in xFi von der
Form:
. m
m
i), + DAx Fi
mxFi+
— + — )x¥l +
T1T2
D,
(2 c)
+
Das Störungsglied raä:0/T resultiert aus der Integration
t
X
m f.
m f da;
in .
m .
— I a;dt = — I —r— dZ = — a; — — xn.
T J
T J
di
r
T
«=°
¿ = i„
Die Relaxationszeit r ist stark temperaturabhängig
und strebt für tiefe Temperaturen gegen + oo, für
hohe Temperaturen gegen Null. Für r -> + oo geht
Gl. (1 a) über in: mx -f- Dx = 0, eine ungedämpfte
Schwingung.
U
Für den Fall r
0 formt man um in:
xmx -+- mx + rDx
=
7777777777777777777777777777
Abb. 2.
Die Lösung dieser Diff.-Gl. liefert xFi = cpx (t) und
somit auch
mx0,
und erhält x = x0; die Bewegung geht mit konstanter Geschwindigkeit x0 in positiver Richtung
weiter.
2. Z w e i p l a s t i s c h - e l a s t i s c h e M e c h a n i s m e n (Modell nach Abb. 2)
0C —
—
T1
+ — J 0>i(O d i = /(<)•
über,
m
+ T,
D2xFa.
Mit Hilfe der Beziehung ¿ K i =
umformen in:
»1% +
XF,
Führt man Gl. (2 c) in eine Gleichung in
so erhält man:
Die Kräfteverhältnisse zu jedem beliebigen Zeitmoment werden durch die Diff.-Gl. wiedergegeben:
mx = — DlxFi
, + xKl =
L
kann man
¿F, + -^l^F, + DzxFt = 0 ;
Mit Hilfe der Anfangsbedingungen:
(2 a)
oder wenn man durch r 2 dividiert und hierzu die
differenzierte Form der Gl. (2 a) addiert
t = 0;
a; = 0,
xFi = 0,
£
^F,
=
x = 0,
xF
xKi = 0;
=
=—
=
—,
arKl =
0,
—
Unauthenticated
Download Date | 2/13/17 4:40 PM
Die Summe der Konstanten beträgt somit:
1
z F i — x0 [
D, + D< "1 •••
¿0
kann man diese Gleichung durch Integration reduzieren :
,
+
+
xKi
+
(D1
\[-—+D1
+ D2)
DA
xKi
—DzxF2,
x = xFi + xKi = xFi +
xKi,
bzw. x = ¿Fi -f- xKi = xFi + ¿k2 ,
c)
xKi =—*K2
1
=—
t2
m\
usw.
m
Das Störungsglied resultiert aus den folgenden
Integrationen:
J^Kjdt
To
T,
t
m\ (*...
,
0
x—
Das Doppelmodell nach Abb. 2 mit den beiden
Relaxationszeiten rx und r 2 geht für den Fall
r2
+ 00 in das Modell nach Abb. 3 über. Führt
man in Gl. (3) den Grenzübergang r 2
+ 00 aus,
so erhält man sofort die hier gültige Schwingungsgleichung
m x-\
x + (Dx - f D2)
X
H
—x
r=0,t'0
M
XKi
m\ C d.r'K, ,
xKl = XjTl
(m
m \ ..
= (77+
(m
(3)
3. E i n p l a s t i s c h - e l a s t i s c h e r u n d e i n
rein elastischer M e c h a n i s m u s
(Modell nach Abb. 3)
fth)>
Im
^ \
mx0,
= mJ —^ k' dt = mx-f- m -^j-, und
X = —XalT\
m
^
die Bewegung geht mit konstanter Geschwindigkeit in positiver x-Richtung weiter.
0, x K i = 0,
m
—x0
( m
x = x0
gegeben, und es folgt also mit a) xKi = 0, also
mit b) xFi = x0, hieraus wiederum mit c) :irKi =
Zpjti — x0/r1.
Aus a) x = 0, somit nach b) ¿ F i = — x j r x und
aus c) xK — — ¿o/ T i5 ferner aus a) mx — — Dxx0
=
..
mx =
x = 0, xFi = 0, xKi — 0,
nach b)
t1t2
Für den Fall rx -> + 00, r 2 -> + 00 erhält man:
mx-\- (Dx + D2) x = 0, oder unter Berücksichtigung der Anfangsbedingungen integriert: mx
(Dx + D2) x — 0. Man erhält also die Gleichung
einer ungedämpften Schwingung, wie das Modell
nach Abb. 2 es für diesen Fall verlangt.
Für
r 2 -> 0 findet man nach vorheriger
Multiplikation von (Gl. 3) mit r 1 r 2 und anschließender Durchführung des Grenzüberganges:
Für t = 0 sind die Bedingungen
^F2 -
TlT2
(2d)
mx = —DxxFi
b)
Tj
Dieser Ausdruck erscheint auf der rechten Seite
der Diff.-Gl. (2 a) mit positivem Vorzeichen.
Die Summe der Gl. (2 c) und (2d) liefert eine
Diff.-Gl. in x:
(m
Anmerkung: Die Bestimmung der Anfangsbedingungen erfolgt mit Hilfe der Beziehungen
a)
Tl
m \ ¿0
Abb. 3.
Unauthenticated
Download Date | 2/13/17 4:40 PM
0
(4)
Läßt man in Gl. (4) r nach + oo streben, so erhält
man:
mx+ (Dx + D2) x = 0.
Unter Berücksichtigung der Grenzbedingungen
folgt durch Integration die Gleichung einer ungedämpften Schwingung:
•• , /t\ i ri \
^
m x + (D1 + D2) x = 0,
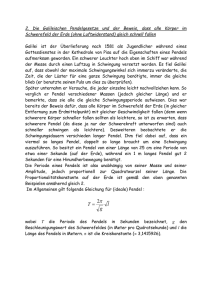
4. Z w e i p l a s t i s c h - e l a s t i s c h e M e c h a n i s m e n , ein rein e l a s t i s c h e r M e c h a n i s m u s
(Modell nach Abb. 4)
Ableitung der Schwingungsgleichung erbisherigen Ableitungen,
Es gilt der Kraftansatz:
Die
analoS d e n
mi -- —D,1 xF — D2 X2V
*
—D„x.
3
9
Hieraus folgt
was der modellmäßigen Vorstellung entspricht.
t
Führt man den Grenzübergang r -> 0 durch, so
m ¿cFi - f — XFI + D1XFi + D3XFI + — ! - J a;Fi d i
1
1 o
folgt: m x - f D2x — 0, entsprechen der Vorstellung, daß bei reibungsloser Bewegung des Kolbens
^2 a;F2 — 0
die Masse auf Kosten der zweiten Feder eine unund durch Differentiation und Division durch r 2
gedämpfte Schwingung ausführen muß.
- findet man:
m ...
m ..
D1 .
Z>3 .
D,
x
x
—
+ T
+ T11T1"2
t lV
t 2" *\ + T1 ~
12
2 Vi + T1~2
. Z>a •
+ —12 « f , = 0 ,
hierzu addiert man:
m'ä-; + — ä F + (D± + D3) xFi + 4T- ¿ F l
Ti
Ti
+ D2 xFt
= 0.
(5)
und erhält
....
Im
m\...
im
\ ..
Bei der Addition tritt der Ausdruck D2 la;F2 -\
auf, der nach
..
xFl
..
-I
2
¿ Fä
/ D.+D,
0
t2
gleichgesetzt werden kann D2XFi-\- D2xFJrv
Mit
a:Fi = r 1 i K i folgt aus Gl. (5) eine Gleichung in
die durch Integration zu reduzieren ist.
Mit den allgemein gültigen Bedingungen
t = 0;
x = 0,
•
,
Ds
n
mx = — DxxFx — D2xFt — Z)gx ,
t
t
f ^F,
f xFl
x = a;Fi + J — d t = xFi+ J — ^ d t ,
X = xFi + - - = XF2 + —~
T1
. 2VKDA
X = XFI+
0
1
Ti
-—
2
12
—
>
usw. und den gegebenen Anfangsbedingungen
¿ = 0; x — 0; ¿ = i:0, sind nur folgende weitere
Anfangsbedingungen verträglich:
xFi = 0 ,
^K, = 0 ,
¿Kx =
x = 0,
0
>
= ¿o/ T l >
^F, —
\
1
I ^ + D . + Z),
«Kx =
Unauthenticated
Download Date | 2/13/17 4:40 PM
Im Gesamtschwingkreis fließt nach einem einmaligen Spannungsstoß der Strom I , durch den
Widerstand R der Strom / K und durch den parallelgeschalteten Kondensator der Strom I C i , wobei
I , I n und I C i Funktionen der Zeit sind mit der
=
Zusatzbedingung / R +
IBezeichnet man die Spannungen über den K o n densatoren mit C7Ci bzw. UCO und die Spannung an
der Spule mit JJ, so gilt:
Abb. 4.
Die bei der Integration auftretenden Konstanten
ergeben zusammen Null:
(
rn
1
^.//d( + ^-/i
und auch
*K 2
2 £= 0
DX+D%+D.
®Kt = 0 »
' t=0
so daß für x folgende Gleichung resultiert:
? n\ ...
D,+D3
oder
=
0 t
u
d
<
=
- i 4 f ,
m \ ...
—
+ — /
T
¡m
uCl + vc,
,
Im
^
D2+D3
„
Z>,
„ \ ..
z=0.
da die Spannungen über dem Kondensator C2 und
dem Widerstand R gleich sind. Die beiden Gleichungen liefern differenziert :
(5b)
5. A b l e i t u n g d e r S c h w i n g u n g s g l e i c h u n g
aus einem e l e k t r i s c h e n M o d e l l
Man kann die verwandten mechanischen Modelle durch elektrische ersetzen 9 .
In der Ersatzschaltung wird die elastische Wirkung einer Feder durch eine Kapazität, die plastische Eigenschaft des Kolbens durch einen Ohmschen Widerstand dargestellt. Der Hintereinanderschaltung von Feder und Kolben entspricht eine
Parallelschaltung von Kapazität und Widerstand.
Die Masse M wird durch die Selbstinduktion L ersetzt. So erhält man für das mechanische Modell
nach A b b . 3 das elektrische nach A b b . 5.
Ci
C,
L'i+^-I+Bij,
0,
(4d)
— 0.
(4e)
Man differenziert Gl. (4d) abermals, multipliziert
mit RC2 und addiert zu Gl. ( 4 e ) :
LI
RC2LI
+ LI
+
0,
C,
1
/
I+RIk
RC
= 0
£}/ + — ! =
0,
oder
1
KC\
1/1
1 \ •
CV +
I
0.
L\C RL
(4f)
2
Für R
+ findet man wieder eine ungedämpfte
Schwingung entsprechend T
-f- oo in Gl. (4),
ebenso folgt für R - » 0, entspr. r
0, eine ungedämpfte Schwingung auf Kosten der Kapazität CV,
Die Diff.-Gl. ('4f) ist der gleiche T y p wie Gl. (4).
III. Lösung der aufgestellten Differentialgleichungen
1. M o d e l l n a c h A b b . 1 , ' G 1 . ( l a )
.. , 1 • ,
x 4- — x 4T
D
x0
x —— .
m
r
Die Summe von homogenem und partikulärem
Integral liefert:
Abb. 5.
9 Philipoff,
„Handbuch
schaft", Leipzig 1942.
—
der
Kolloidwissen-
x
= C e - t ^ - S i n ( c o t + <p) + ^
Unauthenticated
Download Date | 2/13/17 4:40 PM
>
(6)
wobei das partikuläre Integral durch Ansatz in der
Form des Störgliedes sofort zu gewinnen ist.
Mit Hilfe der Anfangsbedingungen t = 0, x = 0,
x = x0 bestimmen sich die Konstanten zu:
C
Die partikuläre Lösung folgt aus einem Lösungsansatz in der Form des Störgliedes: xp = C
m
womit a: = —
-7:
p
D1T1 + D2T
m x0
m—2
cp = arc ctg
D T • sin <p ' r
°
2 RA> m
Dt2
=
j/——-j—;
mit der Schwingungsbedingung Djm>
l/4r 2 .
— -^hom. "f" ^part. >
x = C1ex>t+e<xt(C2 sin cot
x
d, +D
Zu lösen ist die Differentialgleichung
,
D
T,
TO
+ C3 cos co t)+
(3)
2
=
fiT2
V
oder mit X = y — —, y3+3py-\-2q
= 0,
yö
T —
; q
21
6
wobei
. Q
2
±
i
Gl. (4) ist von dritter Ordnung und homogen,
so daß die Lösung analog der Lösung des homogenen Teiles von Gl. (3) gefunden wird. Es gilt
dann:
1
, Z) 1 +Z) 2
D2
,
.
— = v: —
I';
= p
und für x :
U
7)I
a; =
yx = u + v,
u+v
3. M o d e l l n a c h A b b . 3 , Gl. (4)
T
Nach C a r d a n o lauten die Lösungen hierzu:
Vz, 3 = —
2
.
Der Lösungsansatz x = e Ai liefert für den homogenen Teil der Gleichung: A3 + v 7? + £ A + @ = 0,
P=
2 <xx0 — S (Al — 2 « 2 , )
S;
Ai + eo2 + a2 — 2 «Ai
= — C1 —
<x?.\ — a2Ax)
¿0 (A? + co2 — IX ) + S (Axw2
=
co (AI + co2 + a2 — 2 «AJ
= 1;
B,
1 /Dx
—
+ T I = P , x-\-vx-\-£x-\-ox w
m \ r2
i /
(w — v ) ,
1
TM
+ e«'1 (C2 sin co't + C'3 cos co't) .
j/— q ± j/?2 +
rpA
2
Bedingung für das Auftreten einer Schwingung
ist: q2 + pz > 0. Es ist also
<*j£o
. p'
p'.
A;2+£O'2
°
2
¿o (X[2 + co'2 + a'2)
2<x'Ai) '
co' ( A ; 2 + C Ü / 2
¿x = u + v — — ,
^•2, 3 —
2
4. N ä h e r u n g e n f ü r d a s M o d e l l
n a c h A b b . 3, Gl. (8)
{ u - v ) - ~
Es werden die Größen
oder mit-—- (u — v ) = co (Kreisfrequenz)
K =
und
2
3
= a , A2) 3 = a ± ico
= C i ^ 1 ' + e a i (C2 sin co Z
C 3 cos co t).
u+
U + V
Somit folgt für a;hom :
xhom.
(7 a)
(8)
Die Konstanten sind aus denen in Gl. (7) durch
den Grenzübergang r 2 -> + 00 zu gewinnen, wobei
dann S gegen Null geht.
Es folgt:
wobeii u, v =
(?)
Ci =
c2
D
•
0
c,
Dx +
1 ,
Di"*'d%Vm
Hilfe der Anfangsbedingungen t = 0, x = 0,
2 oc Mit
— x j X = 0 bestimmen sich die Konstanten zu
oder mit den Abkürzungen
1
- S wird.
Die Gesamtlösung für Gl. (3) ergibt sich aus der
Summe von homogenem und partikulärem Integral zu:
2. M o d e l l n a c h A b b . 2 , Gl. (3)
1
,
2
Für die Kreisfrequenz ergibt sich co =
T1 T2
°
CO
v - - ,
V
V* f
Unauthenticated
Download Date | 2/13/17 4:40 PM
für große r-Werte (v klein) also tiefe Temperatur
und für kleine r-Werte (v groß, hohe Temp.) untersucht.
Im Ausdruck q2 - f p 3 stehen nur Glieder mit 2.
und höherer Potenz von v. Somit gilt für kleine v
q2 -(- P3 £3/33 und da im allgemeinen Dx » D9,
so folgt q % — £ v / 6 . Hiermit wird nun
|
i,v=
1±
und da sicherlich ^
IV. Das logarithmische Dekrement
Die für die Dämpfung charakteristische Größe,
das logarithmische Dekrement A, läßt sich für die
Modelle nach Abb. 1 bis 3 angeben, wenn man jeweils den Einschwingvorgang vernachlässigt. Im
Falle Gl. (6) legt man für die Schwingung die neue
Nullage x = mxJDr zugrunde, womit dann folgt:
A =
2KI/3
2 71
4 DT
2
klein gegen 1, unter Ver-
(9a)
—1
In Gl. (7) bezieht man auf die Nullage
nachlässigung der 2. und höheren Potenzen von v
Xx = —2v/3;
co = YJ; a =
D1T1 + D2 T2
—v/6.
Da ferner a. und Ax klein, co groß, folgt für die Konstanten
und vernachlässigt das Einschwingen auf diese
Nullage entsprechend Cxeklt. Dann gilt:
2 xe 3u + 3v + 2v
A
Entsprechend wird in Gl. (8) das Glied C^e*'1* vernachlässigt, so daß analog oben gilt:
womit schließlich aus Gl. (7) wird:
• sin t o i .
x = —
ca
Für große v werden im Ausdruck
4. Potenzen von v berücksichtigt:
q2
-f
(8 a)
pz
nur die
D<
m • 33
X1 % — V ,
» -
Aus E' läßt sich nach D' —
I .
\ m
D.
Für kleines a, folgt wieder C 1 = — C3 % 0; C2 —
xjco, womit Gl. (7) schließlich die Form annimmt
— e-D>rt'm-sin
2 71 3 M' + 3V' + 2V'
T7=r
,
7
.
3 y3
U
—V
(9c)
Der komplexe E-Modul E' ist so definiert, daß
man die im Laufe der Schwingung zu einem
bestimmten Zeitmoment auftretende Spannung
durch die formal dem Hookeschen Gesetz analoge
Beziehung s — E'y angeben kann.
Hiermit wird
also
A =
V. Der komplexe Elastizitätsmodul für freie Schwingungen
D9
q2 -)- 2?3 ^ r4
m • 33
•T^T-V-
(9 b)
3f3
ojt.
(8b)
5. M o d e l l n a c h A b b . 4 , Gl. (5b)
Die Lösung von Gl. (5 b) soll im einzelnen nicht
angegeben werden, da prinzipiell keine Schwierigkeiten zur Lösung bestehen. Diff.-Gl. ist 4. Ordnung und homogen, so daß der Lösungsansatz
x = e/A zum Ziele führt. Man erhält also eine Gleichung 4. Grades in X.
qE'
die komplexe
Direktionskraft D' ableiten, mit deren Hilfe dann
die Schwingung durch die Diff.-Gl. xm — — D'x
beschrieben ist. Die Lösung dieser Gleichung, die
wieder nur formal dem Ansatz für eine ungedämpfte Schwingung entspricht, läßt sich dann
in komplexer Form angeben durch:
x = Ceil<a't+iP),
(10)
wobei co' = ]/D'[m• Da es sich stets um gedämpfte Schwingungen handelt, muß co' auch
komplexer Natur sein, etwa der Form id + co, womit dann gilt:
x _ (J e~M + i (cot+ <f>) _
Hierbei ist ö der Dämpfungsfaktor.
Für die Anfangsbedingungen t — 0, x = 0,
x = x0 bestimmen sich cp und C wie folgt:
cp — 71/2; C — x0/o/.
Unauthenticated
Download Date | 2/13/17 4:40 PM
Es läßt sich nun andererseits Gl. (6) (für das Modell nach A b b . 1) in der komplexen Form schreiben:
Auswertung von Meßergebnissen zur Bestimmung
der Materialkonstanten E und r zweckmäßig auf
diese Gleichungen zurückführt.
^o —^r + * (oit + <p)
(11)
x — —- e 2T
Oi
wenn man die Nullage m xJDr zugrunde legt; hier-
VI. Theoretische Behandlung der Rückprallelastizität u .
bei ist co = ]/-D
\ m
i
4T
. Zur Bestimmung D'
2
f(D), also der Beziehung zwischen komplexer und
statischer Direktionskraft 1 0 , vergleicht man Gl.
(11) mit Gl. (10) und setzt also definitionsgemäß:
1
+ ico
2t
oder
ico —
oder
D' = m co2 -
Mit c
D
n
=v
4 t2
D' = D
= 1/
D
4 t2
kann man umformen in
UV V UV
lf-r + —
U/
_
.
(12 a)
D
folgt m =
4 t2
womit nach Gl. (12) f o l g t :
D
'
=
Der theoretischen Behandlung der Rückprallelastizität liegt folgende Vorstellung zugrunde:
Auf den Probekörper P aus dem zu untersuchenden Material trifft zur Zeit t = 0 der Probekörper K (Masse m) mit der Geschwindigkeit x0
(Abb. 6). K soll ein nicht deformierbarer Körper
sein, was immer dann erfüllt ist, wenn EK » Ev
ist, wobei Ek und Ep die Elastizitätsmoduli von
K bzw. P sind.
(12)
4 t2
womit der Realteil („Dynamische Direktionskraft") die einfache Form D — m / 2 r 2 annimmt.
Ferner läßt sich D' als Funktion von Direktionskraft D, Frequenz co und Relaxationszeit r bestimmen.
Aus
12
_ / 4r2a»2 — 1
{
+ 1 +
D
Hieraus folgt E' nach E' =
4 t o)
4 T2Ö>2
(12b)
In D'
77777777777777777777
Abb. 6.
V o m Moment des Auftreffens an kann man K
mit P zunächst fest verbunden denken; K wird
dann auf Kosten der elastischen Eigenschaften
von P eine Schwingung ausführen, die zunächst
durch x = f(t) wiedergegeben sei. Aus der Bedingung mx = —mg
(g — Erdbeschleunigung)
folgt die Zeit t = i a , nach der sich K wieder von
P löst; die Geschwindigkeit von K in diesem Zeitpunkt beträgt
¿(i = ia) = f'(x) (t = U) •
Aus den Gesetzen des senkrechten Wurfes aufwärts folgt dann für die Rücksprunghöhe h r :
X£(t=t a)
2y
Es gelingt also auf diese Weise, auch die freie
Schwingung eines Maxwellschen Körpers mit Hilfe
eines komplexen E-Moduls zu beschreiben. Man
ist jedoch zur Berechnung der Funktion E' — f
(E; r ; co) auf die Gleichungen angewiesen, die in
Abschnitt I — V angegeben sind, so daß man eine
Als Funktionen x = f(t) verwendet man die Lösungen der in Abschnitt I — V behandelten Schwingungsgleichungen Maxwellscher Körper, aus denen
dann die Größen ¿ ( ¿ = i a ) abzuleiten sind 1 3 .
10 Vgl. E. J e n c k e l
u. M. C o e n e n , „Torsion
plast.-elast. Stoffe" (noch unveröffentlicht).
11 Vgl. L. M u 11 i n s , Trans. Jnstn. Rubber Ind. 22,
235 [1947].
k
12 P. S t ö c k 1 i n , Kautschuk 18, 151 [1942]; Kautschuk 19, 3 [1943].
13 Über experimentelle Ergebnisse und eine Berechnung in der angedeuteten Weise vgl. E. Jenckel u.
E. Klein, Z. Naturforschg., im Druck.
K
Unauthenticated
Download Date | 2/13/17 4:40 PM