Physik A Teil 3: Elektrizität und Magnetismus - Physik
Werbung

Roland Engfer
Physik A
für Naturwissenschaftler
AS
TU
RI
CEN S I S
UN I VE RSI T
Teil 3: Elektrizität und Magnetismus
MDCCC
XXXIII
Skriptum zur Vorlesung von Andreas Schilling
SS 2005
Physik-Institut der Universität Zürich
September 2004
Inhaltsverzeichnis
1 Einführende Bemerkungen
1
2 Elektrostatik
2.1 Das Coulombsche Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Das elektrische Feld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Das elektrische Potential . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Gauss’scher Satz und Poisson’sche Differentialgleichung . . . . . . . . . .
2.4.1 Feldlinien oder Stromlinien eines Vektorfeldes † . . . . . . . . . . .
2.5 Elektrostatische Felder von geladenen Leitern . . . . . . . . . . . . . . . .
2.5.1 Elektrische Felder an Spitzen . . . . . . . . . . . . . . . . . . . . .
2.5.2 Influenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.3 Faradaysches Becherexperiment und van de Graaff Generator . . . .
2.5.4 Berechnung der Felder von Leitern . . . . . . . . . . . . . . . . . .
2.6 Die Kapazität elektrischer Leiter . . . . . . . . . . . . . . . . . . . . . . .
2.6.1 Beispiele von Kondensatoren . . . . . . . . . . . . . . . . . . . . .
2.7 Isotrope Dielektrika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.7.1 Der verallgemeinerte Gauss’sche Satz . . . . . . . . . . . . . . . . .
2.7.2 Beispiele zu Dielektrika . . . . . . . . . . . . . . . . . . . . . . . .
2.7.3 Eine atomistische Interpretation der Dielektrizitätskonstanten † . .
2.8 Die Energie des elektrostatischen Feldes . . . . . . . . . . . . . . . . . . .
2.8.1 Berechnung der Kräfte auf Leiter und Dielektrika aus der Feldenergie
2.8.2 Beispiele zur Energie des elektrostatischen Feldes . . . . . . . . . .
3
3
4
5
9
11
14
15
16
16
17
18
19
21
24
25
26
27
28
29
3 Stationäre elektrische Ströme
3.1 Begriffe zur Beschreibung elektrischer Ströme . . . . . .
3.1.1 Die Spannung in einem Leiter . . . . . . . . . . .
3.1.2 Die elektrische Stromdichte in einem Leiter . . .
3.1.3 Die elektrische Stromstärke . . . . . . . . . . . .
3.1.4 Der elektrische Widerstand eines Leiters . . . . .
3.1.5 Elektromotorische Kraft und innerer Widerstand
3.1.6 Die Kirchhoff’schen Regeln . . . . . . . . . . . . .
3.2 Mechanismus und Charakteristik der elektrischen Leitung
3.2.1 Leitung in Metallen † . . . . . . . . . . . . . . . .
3.2.2 Halbleiter † . . . . . . . . . . . . . . . . . . . . .
3.2.3 Leitung in flüssigen Elektrolyten . . . . . . . . .
3.2.4 Leitung in Gasen . . . . . . . . . . . . . . . . . .
3.2.5 Anwendungen der Gasentladung für Detektoren .
3.2.6 Leitung in Vakuumröhren . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
31
31
32
32
33
33
34
35
36
41
42
43
44
.
.
.
.
.
.
45
45
45
46
49
50
51
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Magnetostatik
~
~
4.1 Die Lorentz-Kraft und das B-Feld
und H-Feld
im Vakuum . . .
4.1.1 Erfahrungstatsachen und Fundamentalgesetze . . . . . .
4.1.2 Die Gesetze von Biot-Savart und Ampère . . . . . . . .
4.1.3 Das Vektor-Potential † . . . . . . . . . . . . . . . . . . .
4.2 Anwendungen der Gesetze von Lorentz, Ampère und Biot-Savart
4.2.1 Das magnetische Feld eines Kreisstromes . . . . . . . . .
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4.2.2
4.2.3
4.3
4.4
Das Magnetfeld einer langen Spule (Solenoid) . . . . . . . . .
Magnetischer Dipol im homogenen Magnetfeld (oder Messung
Erdfeldes mit einer Kompassnadel) . . . . . . . . . . . . . . .
4.2.4 Bestimmung der Masse eines Elektrons . . . . . . . . . . . . .
4.2.5 Das Wien-Filter (elektrostatischer Sparator) . . . . . . . . . .
4.2.6 Der Halleffekt . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.7 Bewegung eines geladenen Teilchens im Solenoidfeld . . . . . .
†
~ und B-Feld
~
Gedanken zum E. . . . . . . . . . . . . . . . . . . . .
Permeable Medien . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4.1 Erfahrungstatsachen . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Magnetisierung und magnetische Suszeptibilität † . . . . . . .
4.4.3 Die magnetischen Substanzen . . . . . . . . . . . . . . . . . .
~
4.4.4 Die Energie eines magnetische Dipols im B-Feld
. . . . . . .
4.4.5 Vergleich von Medien im elektrischen und magnetischen Feld
~ und H-Felder
~
4.4.6 Ban Grenzflächen . . . . . . . . . . . . . . . .
4.4.7 Elektromagnete und Permanentmagnete . . . . . . . . . . . .
5 Elektrodynamik
5.1 Das Faraday’sche Induktionsgesetz . . . . . . . . . . . . . .
5.1.1 Grundversuche . . . . . . . . . . . . . . . . . . . . .
5.1.2 Das Induktionsgesetz . . . . . . . . . . . . . . . . . .
5.2 Anwendungen des Induktionsgesetzes . . . . . . . . . . . . .
5.2.1 Der elementare Motor . . . . . . . . . . . . . . . . .
5.2.2 Wechselspannungsgeneratoren . . . . . . . . . . . . .
5.2.3 Das Betatron † . . . . . . . . . . . . . . . . . . . . .
5.2.4 Die Unipolarmaschine . . . . . . . . . . . . . . . . .
5.2.5 Widerstandsdämpfung beim Galvanometer † . . . . .
5.2.6 Magnetfeldmessung mit einer Flipspule . . . . . . .
5.2.7 Wirbelströme . . . . . . . . . . . . . . . . . . . . . .
5.2.8 Gegenseitige Induktion zweier Leiter . . . . . . . . .
5.2.9 Selbstinduktion . . . . . . . . . . . . . . . . . . . . .
5.2.10 Energiedichte des magnetischen Feldes . . . . . . . .
5.2.11 Analogie der Selbstinduktion zur Masse der Mechanik
5.3 Quasistationäre Ströme . . . . . . . . . . . . . . . . . . . . .
5.3.1 Stromkreise mit konstanter EMK . . . . . . . . . . .
5.3.2 Die konventionelle Spulenzündung beim Auto † . . .
5.3.3 Der Thomsonsche Schwingkreis . . . . . . . . . . . .
5.3.4 Harmonische Wechselströme . . . . . . . . . . . . . .
5.3.5 Transformatoren . . . . . . . . . . . . . . . . . . . .
5.3.6 Arbeitsleistung eines Wechselstromes . . . . . . . . .
5.4 Maxwell’scher Verschiebungsstrom und Gleichungen . . . .
5.4.1 Der Maxwell’sche Verschiebungsstrom . . . . . . . .
5.4.2 Die Maxwell’schen Gleichungen . . . . . . . . . . . .
A Physikalische Konstanten Stand 1986
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
des
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 52
.
.
.
.
.
.
.
.
.
.
.
.
.
.
52
53
54
54
55
56
57
57
57
59
60
61
61
61
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
64
64
64
65
67
67
68
68
69
70
71
71
71
72
73
73
74
74
76
77
79
81
82
83
83
84
86
B Grössen und Einheiten der Physik
B.1 Grössenart, Dimension, Einheitensystem . . . . . . . . . . . . . . . . . . .
B.1.1 Grösse und Zahlenwert . . . . . . . . . . . . . . . . . . . . . . . .
B.1.2 Grössenart und Dimension . . . . . . . . . . . . . . . . . . . . . .
B.1.3 Grössengleichungen . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1.4 Winkel und Raumwinkel . . . . . . . . . . . . . . . . . . . . . . . .
B.1.5 Wahl der Basisgrössen in Einheitensystemen . . . . . . . . . . . . .
B.2 SI-Einheiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.1 Von den SI-Einheiten abgeleitete Einheiten z.T. mit speziellen Namen
B.2.2 Verschiedene Einheiten . . . . . . . . . . . . . . . . . . . . . . . . .
B.2.3 Vorsilben der Dezimalteilung von Einheiten . . . . . . . . . . . . .
B.3 Astronomische Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
87
87
87
88
88
88
90
91
92
93
93
C Mathematische Hilfsmittel
C.1 Mathematische Formelsammlung . . . . . . . . . . . . . .
C.1.1 Trigonometrie . . . . . . . . . . . . . . . . . . . .
C.1.2 Komplexe Zahlen . . . . . . . . . . . . . . . . . . .
C.1.3 Hyperbolische Funktionen . . . . . . . . . . . . . .
C.1.4 Inverse Funktionen . . . . . . . . . . . . . . . . . .
C.1.5 Ableitungen und unbestimmte elementare Integrale
C.1.6 Einige bestimmte Integrale, . . . . . . . . . . . . .
C.1.7 Reihenentwicklungen . . . . . . . . . . . . . . . . .
C.2 Zusammenstellung von Differentialgleichungen in Physik A
C.3 Vektorgleichungen . . . . . . . . . . . . . . . . . . . . . . .
C.4 Theoreme aus der Vektorrechnung . . . . . . . . . . . . . .
C.5 Explizite Formen von Vektoroperationen . . . . . . . . . .
94
94
94
94
94
94
95
96
96
97
98
98
99
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Elektrizität und Magnetismus
1
Einführende Bemerkungen
In der Elektrizitätslehre befassen wir uns mit Phänomenen, die nicht mehr wie in der Mechanik anschaulich fassbar sind. Eine Masse können wir sehen und anheben; eine Ladung
können wir nur durch ihre Wirkung in einer Messung erfassen.
Früher waren die drei Gebiete Elektrizitätslehre, Magnetismus und die Optik völlig
getrennt und standen nebeneinander. Heute sind die elektrischen und die magnetischen
Felder und damit auch die Optik in der Maxwell’schen Theorie vereinigt. Die Erscheinungen und Beobachtungen machen uns zunächst Schwierigkeiten im Verständnis, anderseits ist eine Vereinigung verschiedenster Phänomene in einer gemeinsamen einheitlichen
Theorie das Ziel der Physik, wie dies vor allem die Teilchenphysik verfolgt. Von den vier
uns bekannten fundamentalen Wechselwirkungen der Gravitation, der elektromagnetischen Wechselwirkung, der schwachen Wechselwirkung und der starken Wechselwirkung
der Quarks, sind bisher nur die elektromagnetische Wechselwirkung und die schwache
Wechselwirkung zur elektroschwachen Wechselwirkung vereinigt. Die Vereinigung mit den
anderen beiden Wechselwirkungen ist ein wesentliches Fernziel der theoretischen und experimentellen Teilchenphysik (vgl. Physik AI Kap.2.4).
Elektromagnetische Erscheinungen und ihre Gesetze beeinflussen, wie auch die Mechanik, einen grossen Teil unseres täglichen - nicht nur des technischen - Lebens. Ich werde wie
auch in Physik AI versuchen, die grundsätzlichen Gesetze anhand von Versuchen herauszuarbeiten, um damit das prinzipielle Verstehen der Gesetzmässigkeiten aufzubauen. Wir
sind dann natürlich immer noch weit davon entfernt, detaillierte und auch technische Fragen zu lösen, wie z.B. die genaue Berechnung eines Generators oder einer elektronischen
Schaltung.
Mit einfachen Mitteln können Körper in Zustände gebracht werden, in denen sie Kräfte
aufeinander ausüben, die auf nichtmechanische Eigenschaften der Materie hindeuten. Werden z.B. gewisse Materialien aneinander gerieben, so können die daraus resultierenden
Kräfte von so bedeutender Stärke sein, dass sich deren Wirkungen direkt beobachten
lassen. Man nennt solche Körper elektrisch geladen, oder als Postulat: sie tragen eine
elektische Ladung. Solche Materialien sind einfachste Ladungsquellen. Wird ein Körper
mit einer Ladungsquelle in Berührung gebracht, so wird dieser ebenfalls geladen. Gewisse
Substanzen, insbesondere Metalle, haben ferner die Fähigkeit, elektrische Ladungen durch
Leitung von einem auf einen anderen zu übertragen. Ladung kann somit fliessen;
ein elektrischer Strom ist bewegte Ladung
.
Für elektrische Ladungen gilt:
• Erhaltung der Ladung: Die Summe der elektrischen Ladungen ist unter Berücksichtigung der Vorzeichen in einem abgeschlossenen System streng erhalten. Dies ist
der vierte streng erfüllte Erhaltungssatz der Physik. Er wird in der Quantenelektrodynamik mit der Eichinvarianz begründet.
• Quantisierung der Ladung: Jede elektrische Ladung Q ist ein ganzzahliges Vielfaches der Elementarladung e = 1.60217733(49) · 10−19 Cb (vgl. auch Tabelle 1).
1
Tabelle 1: Zusammenstellung einiger Elementarteilchen mit ihren Eigenschaften.
q = ±1 bedeutet eine positive oder negative Elementarladung. Jedem Teilchen ist ein
AntiteilchenA zugeordnet mit gleicher Masse jedoch entgegengesetzter Ladung. Es gibt
neutrale Teilchen (γ, π 0 ), bei denen Teilchen und Antiteilchen in sich identisch sind. τ
.
ist die Lebensdauer. 1 MeV/c2 = 1.7826627 · 10−30 kg.
Masse
Ladung
2
[MeV/c ]
[q]
Teilchen
Austauschteilchen:
Photon
Graviton
Leptonen:
Elektron
PositronA
e-Neutrino
e-AntineutrinoA
Myon
Anti-MyonA
µ-Neutrino
µ-AntineutrinoA
Mesonen:
Pion
K-Meson
K0 -Meson
Baryonen:
Proton
Neutron
Lambda
Sigma
γ
τ
[s]
Spin
[h̄]
0
0
0
0
∞
∞
1
2
e−
e+
νe
ν̄e
µ−
µ+
νµ
ν̄µ
0.511
0.511
0
0
105.659
105.659
0
0
−1
+1
0
0
−1
−1
0
0
∞
∞
∞
∞
2.2 · 10−6
2.2 · 10−6
∞
∞
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
π±
π0
K±
K0
139.57
134.96
493.67
497.67
±1
0
±1
0
2.6 · 10−8
0.8 · 10−16
1.2 · 10−8
0.9 · 10−10
5.2 · 10−8
0
0
0
0
0
p
n
Λ
Σ+
Σ0
Σ−
938.28
939.57
1115.60
1189.37
1192.47
1197.35
+1
0
0
+1
0
−1
∞
918
2.6 · 10−10
0.8 · 10−10
5.8 · 10−20
1.5 · 10−10
1
2
1
2
1
2
1
2
1
2
1
2
• Verknüpfung der Ladung mit Masse: Die Erfahrung und alle Beobachtungen
zeigen, dass Ladung immer mit einem Teilchen einer endlichen Masse verknüpft
ist, sie hat damit einen Substanzcharakter (siehe Tabelle 1). Alle Elementarteilchen
ohne Masse m = 0 haben keine Ladung (Neutrino, γ). Dagegen können Teilchen
mit einer Ladung q = 0 eine endliche Masse m 6= 0 besitzen (Neutron, π 0 ), sie
haben i.a. auch eine von null verschiedene Ladungsverteilung, die nur im Integral
über das ausgedehnte Teilchen exakt null ergibt. Der Grund liegt in der Struktur
der Baryonen (z.B. Neutron, Proton) und Mesonen (z.B. π 0 ), die aus geladenen
Quarks aufgebaut sind. Der tiefere Zusammenhang zwischen Ladung und Masse
sowie die Tatsache, dass die Ladung des Elektrons und des Protons bis auf das
entgegengesetzte Vorzeichen exakt gleich sind, ist bisher unbekannt.
2
Die Existenz von zwei Ladungen wurde zuerst von Ch. F. de Cisternay du Fay (16981739) festgestellt, jedoch erst 1778 von G. F. Lichtenberg (1742-1799) formuliert. Er demonstrierte 1777 in Göttingen eindrucksvoll das Verhalten verschieder Ladungen mit seinen Staubfiguren. Die Bezeichnung positive + und negative - Ladung geht auch auf ihn
zurück1 .
Die ältesten Ladungsquellen sind für Experimente praktisch kaum zu gebrauchen:
negative Ladung = Ladung des geriebenen Bernsteins
positive Ladung = Ladung des geriebenen Glasstabes.
Erst mit den praktischen Ladungsquellen der Batterien 1799 von Volta (1745-1827)
erfunden und der elektromagnetischen Induktion 1831 von M. Faraday (1791-1867) entdeckt, mit denen noch heute der wesentliche Anteil der elektrischen Energie erzeugt wird,
konnten die ersten Experimente zur Elektrizitätslehre und zum Magnetismus beginnen.
2
Elektrostatik
In diesem Kapitel beschränken wir uns auf das physikalische Verhalten statischer Ladungen. Es werden im wesentlichen die Kraftwirkungen zwischen ruhenden, geladenen
Körpern diskutiert werden.
2.1
Das Coulombsche Gesetz
Das physikalische Verhalten geladener, ruhender Körper lässt sich auf die folgende fundamentale Erfahrungstatsache zurückführen:
Werden zwei kleine, kugelförmige Körper durch die gleiche Ladungsquelle geladen, so
stossen sie sich gegenseitig ab. Dabei gilt das Coulombsche2 Gesetz
~
¾F21
e
Q1
-e
Q2
~r12
F~12-
Q1 · Q2 ~r12
Q1 · Q2
F~12 = const.
·
· ~er12
= const.
2
2
r12
r12
r12
(1)
Q1 und Q2 sind die Ladungsmengen, kurz Ladungen, die die beiden Körper tragen.
const. ist zunächst eine beliebige Proportionalitätskonstante. Werden die beiden Körper
durch verschiedene Ladungsquellen geladen, so ist die Kraft entweder abstossend oder
anziehend. Wir schliessen daraus, dass zwei Arten elektrischer Ladung existieren, denen
nach Lichtenberg das positive und das negative Vorzeichen gegeben wird.
Mit dieser Festsetzung gilt das Coulombsche Gesetz Gl. (1) für beliebige Ladungen3 .
Damit sind wir in der Lage, eine Ladungseinheit festzusetzen.
Im SI-System wählt man die Einheitsladung, das Coulomb=Cb=As, so, dass zwei
solche Ladungen im Abstand 1m aufeinander die Kraft 8.987552 · 109 Nm2 Cb2 ausüben.
1
Lichtenberg war der Meinung, dass die Physiker “sich mehr an die Zeichengebung der Mathematiker
als an die der Apotheker” halten sollten. Zu den Lichtenbergschen Entladungsfiguren siehe P.O. Pedersen
Kgl. Danske Videnskab. Selskab. Math.-fys. Medd.I Nr.11 (1919).
2
Charles Augustin de Coulomb (1736-1806).
3
In der Quantenfeldtheorie wird die Coulombkraft durch das Photon als Austauschteilchen mit einem
ungeraden Spin=1 erzeugt. Für die Wechselwirkung zwischen einem Teilchen (z.B. Elektron mit der
Ladung −e) und seinem Antiteilchen (Positron mit der Ladung +e) besteht dann eine anziehende Kraft
und bei zwei gleichen Teilchen und damit gleichen Ladungen eine abstossende Kraft. Bei der Gravitation
mit dem Graviton als einem Austauschteilchen mit geradem Spin=2 ist die Kraft immer anziehend,
unabhängig von den Kombinationen von Teilchen und Antiteilchen.
3
Der genaue Wert ist das Quadrat der Lichtgeschwindigkeit mal 10−7 . Damit ist die Proportionalitätskonstante
2
9 N m
.
const. = 8.987552 · 10
Cb2
1
Setzt man willkürlich (vgl. Fussnote Kap.2.4.) const. = 4πε
, dann ist die neue Influ◦
enzkonstante
ε◦ = 8.85418782 · 10−12 Cb2 N−1 m−2 und das Coulombsche Gesetz lautet
F~ =
Q1 Q2~r
Q1 Q2 ~r
1
·
· =
2
4πε◦
r
r
4πε◦ r3
(2)
Für die Umrechnung der mechanischen und elektrischen Einheiten4 gilt:
1 Nm=1 J=1 Ws=1 VAs.
Das Coulombsche Gesetz Gl. (2) gilt exakt für Punktladungen und für kugelsymmetrische Ladungsverteilungen, die sich nicht durchdringen, hierbei ist r der Abstand ihrer
Mittelpunkte5 .
Vergleicht man die Stärke der Gravitationskraft z.B. zweier Protonen mit der CouΓm2 4πε
lombkraft derselben Protonen, dann erhält man FFGC = pe2 ◦ = 1.24 · 10−36 . Damit kann
für einzelne Teilchen die Gravitation gegenüber der elektromagnetischen Wechselwirkung
vernachlässigt werden; da es jedoch für die Gravitation im Gegensatz zur Coulombkraft
keine Abschirmung gibt, übersteigt die Gravitation bei genügend grossen Massen trotz
ihrer Schwäche jede andere Wechselwirkung und kann dann im Exremfall Neutronensterne
und schwarze Löcher bilden.
2.2
Das elektrische Feld
Eine Ladungsverteilung Q übt eine Kraft auf die Test-Ladung q aus.
#Ã
Q
F~
q b -
µ
¡
"!
¡
~
r
¡
¡
r
4
~ r)
Die Kraft kann geschrieben werden als: F~ (~r) = q E(~
Das elektrische Feld der Ladungen Q ist unabhängig von
der Testladung q am Ort ~r definiert als
. ~
~ r) =
E(~
F (~r)/q,
[E] =
N
V
Kraft
=
=
Ladung
Cb
m
Bemerkung zum cgs-System: Im elektrostatischen cgs-System lautet das Gesetz von Coulomb:
F =
q1 q2
→ [F ] = cm g/s2 = dyn.
r2
Damit wird die Einheit für q: cm3/2 g1/2 s−1 . Es gilt: 1 Cb = 1 As = 10 c cm3/2 g1/2 s−1 (c in m/s) =
2.998 · 109 esu. Der Nachteil sind gebrochene Exponenten für abgeleitete Grössen.
Im elektromagnetischen cgs-System gilt: 1 Cb = 0.1 cm1/2 g1/2 = 0.1 emu.
5
In der Quantenfeldtheorie erhält man ein Potential ∝ 1r und damit ein Kraftgesetz ∝ r12 für masselose
Austauschteilchen, für die elektromagnetische Wechselwirkung ist dies das Photon. Daher hat auch die
Gravitation mit dem masselosen Graviton bis auf die Konstante dasselbe Kraftgesetz. Die heutige Grenze
der Photonenmasse ist mγ < 3 · 10−27 eV/c2 = 5 · 10−43 g. Ist das Austauschteilchen nicht masselos, dann
2
muss das Potential modifiziert werden zu ∝ 1r · e−r mc /h̄c , wie bei der schwachen Wechselwirkung mit
den massiven W± -Bosonen als Austauschteilchen.
4
AK 6¢̧
IA ¢¡
@
µ
H
Y
* +q
©
H
©
¾
r
~ r)
R qH
r@
© ~
¼
©
j E(~
H
ª¢ A@
¡
R
¢® ?AU
2.3
A
¢
@
RAU ?¢®ª
¡
H
©
j
H
¼
©
- r ¾ −q
~ r)
*
©
Y
H
©
H E(~
µ¢̧ 6AK@
I
¡
¢
A
Das Feld einer Punktladung Q ist
~ =
E
Q~r
4πε◦ r3
mit F~ =
Q~r
~
q = Eq
4πε◦ r3
Das elektrische Potential
~ = E(~
~ r). Der Vektor zeigt
Das elektrische Feld einer Punktladung ist ein Zentralfeld E
(für eine negative Ladung) immer auf denselben Punkt und der Betrag ist eine beliebige
Funktion von r. Das Feld einer beliebigen Ladungsverteilung kann durch Überlagerung
der Zentralfelder der einzelnen Ladungen gebildet werden. Analog zur Mechanik ist das
von den Ladungen erzeugte Feld konservativ und es gelten die folgenden vier äquivalenten
Aussagen über die Coulomb-Kraft:
1. Das Linienintegal
Z2
F~ d~r = q
1
Z2
~ d~r = W1→2
E
1
der Kraft, also die Arbeit, die das elektrische Feld leisten muss,
um die Ladung q vom Punkt 1 nach 2 zu verschieben, ist unabhängig vom Weg.
r2
Â
µ
¡
¡
~
¡
*E
©
Á
¿
©
¡
©
©©
1r
À
-
2. Das Linienintegral über einen geschlossenen Weg verschwindet
I
F~ d~r = q
I
#Ã
* E
©©
©©
©
:
»
»
» »»
»
¾
"!
-
~
~ d~r = 0
E
als eine Konsequenz von 1.
3. Das elektrostatische Potential
Es existiert eine skalare Funktion, aus der durch Gradientenbildung die Kraft F~
berechnet wird. Während in der Mechanik die Beziehung F~ = −∇V benutzt wird
und V die potentielle Energie ist, verwendet man in der Elektrostatik die potentielle
Energie pro Ladungseinheit, d.h. das elektrostatische Potential6
"
∂V ~ ∂V ~ ∂V
.
~ =
+j
+k
E
−∇V = − ~i
∂x
∂y
∂z
#
(3)
Die vom elektrischen Feld geleistete Arbeit ist damit
W1→2 = q
Z2
1
~ d~r = −q[V (2) − V (1)],
E
V (2) − V (1) ist die Potentialdifferenz oder die Spannung zwischen 1 und 2.
6
Für das elektrostatische Potential wird wieder der Buchstabe V benutzt, da in diesem Kapitel keine
mechanischen Potentiale behandelt werden.
5
4. Für das konservative elektrostatische Feld gilt wie auch in der Mechanik
~ =∇×E
~ =0
rotE
Das elektrostatische Feld ist wirbelfrei und es gibt keine geschlossenen Feldlinien
in der Elektrostatik. Die Feldlinien beginnen in positiven und enden in negativen
Ladungen.
Die Dimension des Potentials ist [V ] =[Feldstärke][Länge]= Nm
As und die Einheit ist
Volt [V] also
N
N
Newton
Meter = Volt =
m=
m=V
Coulomb
Cb
As
N = 1 V geschrieben werden.
Die Einheit der Feldstärke E kann damit auch als 1 As
m
~ und
Jedem Punkt des elektrostatischen Feldes werden die zwei Grössen der Vektor E
der Skalar V zugeordnet. Wie in der Mechanik ist V nur bis auf eine additive Konstante
bestimmt und es muss ein Bezugspunkt gewählt werden, auf den alle Potentiale bezogen werden. In der Praxis wird oft ein Punkt im Unendlichen oder ein ausgezeichneter
Punkt (Erde) auf das Potential Null festgesetzt. Im folgenden sind einige Beispiele für
Feldstärken und Potentiale berechnet; beachte, dass viele Beispiele wie 1.-4. einfacher mit
dem Gauss’schen Satz Gl. (7) gelöst werden können.
1. Feld und Potential einer Punktladung Q
Mit dem Coulombschen Gesetz Gl. (2) F~ =
AKA 6¢¢̧
I¾»
@
µ
¡
H
Y
*
©
H
©
rQ ¾ V (r)
~
~
r AA
©½¼
U qH
¼
©
j E
H
ª¢ A@
¡
R
¢® ?AU
~
~ r) = F = 1 Q ~r
E(~
q
4πε◦ r2 r
Qq ~
r
1
4πε◦ r 2 r
ist
Feld einer
Punktladung Q
(4)
Das Potential ist mit der vernünftigen Annahme
V∞ = V (r = ∞) = 0
Z
Q
1 Q
Q Z ∞ ~r · d~r
~
V (r) − V∞ =
=
⇒ V (r) =
(5)
E · d~r =
3
4πε◦ r
r
4πε◦ r
4πε◦ r
r
Die Aequipotentialflächen sind konzentrische Kugelflächen. Das E-Feld steht als Fol~ = −∇V senkrecht auf den Äquipotentialflächen.
ge der Beziehung E
∞
2. Das Feld eines ∞ langen, uniform geladenen, geraden Drahtes
dx′ 6
@
@
@
r
dx 6
¡
¡
@
µ- dE
~
@¡
ϑ ¡@
R
′
~
dE
¡
¡R
~ für einen positiv geladenen,
Aus Symmetriegründen muss E
∞ langen Draht radial zylindersymmetrisch nach aussen
stehen, Eϕ = 0. Das Feld der Ladung dQ = λdx′ des Elementes dx′ (λ = Ladung/Längeneinheit, As/m) beträgt:
dE ′ =
λdx′
4πε◦ R2
~ =
und |dE|
2λ cos ϑ dx
4πε◦ R2
für das der beiden Stücke dx und dx′ .
Z
R dϑ
2λ Z π/2
λ
r
, dx =
, E = dE =
.
cos ϑ dϑ =
damit ist mit R =
cos ϑ
cos ϑ
4πε◦ r 0
2πε◦ r
6
Das Feld nimmt linear mit 1/r ab. V =
λ
R
1 λ
ln , V (R) = 0, E =
2πε◦
r
2πε◦ r
(6)
3. Potential eines uniform geladenen geraden Leiters (Koaxialleiter)
Das Potential im Abstand R sei 0. Damit ist mit
Gl. (6)
E=
r R
λ
2πε◦ r
⇒ V (r) =
λ Z R dr
λ
R
=
ln .
2πε◦ r r
2πε◦
r
4. Das Feld einer uniform geladenen unendlich grossen Platte
~ senkrecht zur Platte.
Aus Symmetriegründen steht E
In Analogie zu 2. ist dEn =
dE n
ϑ
dQ = 2πrσdr,
R
dϑ
E=
E ist unabhängig vom Abstand.
σd
,
2ε◦
R dϑ
cos ϑ
(s.Fig.),
σ Z π/2
σ
dEn =
sin ϑ dϑ =
2ε◦ 0
2ε◦
V (0) = 0,
E=
σ
2ε◦
→
E2
→
V =
Z
dr =
Für zwei parallele, entgegengesetzt gleich geladene
Platten (Kondensator) erhält man die anziehende
E=0
→
σ = Flächenladungsdichte [As/m2 ],
r = R sin ϑ,
r
dQ
cos ϑ
4πε◦ R2
→
E=E1+E2
+
66
E=σ/ε◦
d6
Kraft: F12 = E1 Q2 =
Q2
σQ2
Q1 Q2
=
2ε◦
2ε◦ A
unabhängig vom Abstand, da mit
A = Plattenfläche ≫ d2 das Feld bis auf Randeffek→
te homogen ist. Das Feld der beiden Platten ist die
E1
E=0
Vektorsumme zwischen den Platten: E = σ/ε◦
und ausserhalb: E = 0.
Das E-Feld der unendlichen Platte und das Feld im Kondensator unterscheiden sich
um einen Faktor zwei, da die Platte symmetrisch von den positiven Ladungen ein
E-Feld nach +∞ und −∞ und der Kondensator nur zwischen den Platten E = σ/ε◦
aber aussen null hat.
Q1
5. Beliebig verteilte Punktladungen Q1 · · · Qn
Für die konservative Coulombkraft gilt das Superpositionsprinzip. Für n Ladungen Qn an den Orten ~rn ist damit die resultierende Kraft auf eine Ladung q am Ort
~r
7
Qi c |~r − ~ri |
@
6
~ri
F~ (~r) =
@
n
X
F~i = q
©©~
r
V (~r) = −
Zr
∞
~ i = qE
~
E
und damit das Potential
i=1
i=1
@
Rr
@
* q
©
©
n
X
~ d~r = −
E
Zr X
n
~ i d~r =
E
n
X
Vi =
i=1
∞ i=1
n
1 X
Qi (~ri )
4πε◦ i=1 |~r − ~ri |
Feldstärke und Potential sind additiv, wobei für die Feldstärke der Vektorcharakter
zu beachten ist.
6. Kontinuierliche Ladungsverteilungen
Für einen geladenen Körper, bei dem die Ladung kontinuierlich über das ganze
Volumen verteilt ist, kann eine Ladungsdichte
ρ(~rQ ) =
dQ
dτ
definiert werden.
dQ ist die in einem Volumenelement dτ an der Stelle ~rQ enthaltene Ladung.
dQ erzeugt am Ort ~r die Feldstärke
dQ
dτ
rQ
r– rQ
r
~ =
dE
dE
0
1 ρ(~rQ )dτ
(~r − ~rQ ).
4πε◦ |~r − ~rQ |3
Analog zum Ergebnis des vorhergehenden Beispiels erhält man die totale Feldstärke
~ über die gesamte Ladungsverteilung des
im Punkte ~r mit einer Integration von dE
Körpers, wobei V (r = ∞) = 0 gesetzt wird:
~ r) =
E(~
Z
1
4πε◦
Körper
ρ(~rQ )(~r − ~rQ )
dτ
|~r − ~rQ |3
⇒ Potential V (~r) =
Z
1
4πε◦
Körper
ρ(~rQ )
dτ.
|~r − ~rQ |
7. Eine beliebige flächenhafte Ladungsverteilung
kann in analoger Weise berechnet werden. Das Flächenelement dA an der Stelle ~rQ
der Fläche A enthalte die Ladung dQ und damit die Flächenladungsdichte
dQ
.
dA
σ(~rQ ) =
dA
dQ
rQ
0
dE
r
~ =
E
~ =
dE
r– rQ
1
4πε◦
Z
Fläche A
dQ erzeugt in ~r die Feldstärke
1 σ(~rQ ) dA
(~r − ~rQ ) und
4πε◦ |~r − ~rQ |3
1
σ(~rQ ) (~r − ~rQ )
dA sowie V =
3
|~r − ~rQ |
4πε◦
Z
Fläche A
σ(~rQ )
dA.
|~r − ~rQ |
Diese direkte Integrations- oder Summationsmethode kann für vorgegebene Ladungsverteilungen angewendet werden. Als Beispiel berechnen wir das Feld einer
homogen geladenen Kreisscheibe vom Radius a auf der Symmetrieachse.
~ =
Ein Flächenelement dA = r′ dr′ dϕ erzeugt ein Feld |dE|
8
1 σ dA
.
4πε◦ r2
→
Wegen der Symmetrie7 der Anordnung hat das totale Feld auf der Achse nur eine z-Komponente
E
r
ϑ
z
y
r'
dA'
E=
x
ϑ
⇒
dEz =
Z
σ Z cos ϑ dA′
,
dE cos ϑ =
4πε◦
r2
mit dA′ = 2πr′ dr′ und cos ϑ =
a
ϕ
Z
Z
a
¯a
z
z
= √ ′2
r
r + z2
Ã
!
z 2πr′
z 2π ¯¯
cos ϑ dA′ Z
z
′
.
dr
=
−
=
1− √ 2
3
1 ¯ = 2π
2
¯
′2
2
′2
2
r
a + z2
(r + z ) 2
(r + z ) 2 0
0
!
Ã
σ
z
⇒ E = E(z) =
1− √ 2
2ε◦
a + z2
σ
σ
mit den Grenzfällen E(z = 0) =
und E(a → ∞) =
2ε◦
2ε◦
Der zweite Fall entspricht einer unendlich ausgedehnten mit Ladung belegten Ebene,
das von ihr erzeugte E-Feld ist unabhängig vom Abstand von der Ebene.
2.4
Gauss’scher Satz und Poisson’sche Differentialgleichung
In der Mechanik (Phys AI Kap.6.3) haben wir gezeigt, dass für die Coulombkraft, wegen
ihrer r−2 -Abhängigkeit, die Flussregel als ein Sonderfall des allgemeineren Satzes von
Gauss
(auch mit anschaulicher Intuition) gilt:
En
Φ=
E
dA
A
En
dA
Q
E
I
~ =
~ · dA
E
I
En dA =
1 X
Qinnen
Qi =
ε◦ i
ε◦
(7)
En ist die Normalkomponente des E-Feldes an der Stelle
eines Flächenelementes dA einer geschlossenen Fläche8 .
In Worten besagt die Flussregel: Der Fluss Φ des elektrischen
Feldes durch eine geschlossenen Fläche hängt nur von der eingeschlossenen Ladung Q ab und ist unabhängig von der Form von
A und der Verteilung von Q, wie dies für den Fluss des Gravitationsfeldes in der Mechanik (Phys AI Kap.6.3) gezeigt wurde.
Alle nicht eingeschlossenen Ladungen tragen nicht zum Fluss bei
und insbesondere verschwindet der Fluss, wenn die geschlossene
Fläche keine Ladungen einschliesst.
7
Symmetrieüberlegungen können sehr häufig eine Rechnung wesentlich vereinfachen und zum
Verständnis eines Problems beitragen.
Im vorliegenden Fall ist die Scheibe eine Spiegelebene und bezüglich der z-Achse herrscht Rotations~
symmetrie, d.h. eine Drehung um einen beliebigen Winkel ϕ ändert das E-Feld
nicht. Wäre Ey 6= 0
und Ex = 0, dann wäre diese Rotationssymmetrie verletzt. Die Symmetrie verlangt daher Ey = 0 und
Ex = 0 auf der Symmetrieachse. Ein Drehsinn um die z-Achse ist nicht ausgezeichnet, daher kann es auch
keine geschlossene Eϕ -Komponente um die z-Achse geben, die eine Drehrichtung auszeichnen würde. Im
~ = 0 und die Feldlinien sind nicht geschlossen (wirbelfrei).
elektrostatischen Fall ist zusätzlich ∇ × E
8
Bei einer Integration über eine geschlossene Kugelfläche ist A = 4π · r2 , wegen dieses Faktors 4π
wurde im Coulombgesetz in SI-Einheiten Gl. (2) der Faktor 4π eingeführt, der dann im Gauss’schen Satz
wegfällt. In cgs-Einheiten ist dagegen Φ = 4π Q gewählt worden.
9
R
P
→
E
a
Eine Anwendung der Flussregel sei neben den Beispielen 1.-4. S.6 eine
Kugel mit Radius a, die homogen kugelsymmetrisch mit einer
konstanten Ladungsdichte ρ = ρ(r) =konst. belegt ist. Die totale
Ladung ist
Q=
V
Z
ρ(r) dτ,
dτ : Volumenelement der Kugel.
Kugel
~
Aus der Symmetrie der Kugel müssen die Feldlinien des E-Feldes
radial verlaufen, d.h.
E = E(r). Mit der Flussregel für eine Kugelfläche mit dem Radius R konzentrisch zur
~
Kugel a und dem E-Feld
En = E(r) gilt
Φ=
I
En dA = E(R)
I
dA = E(R) 4π R2 =
E(R) =
1 Q
4πε◦ R2
Q
ε◦
und damit für das Feld
für (R ≥ a)
Dies ist das gleiche Feld wie das einer Punktladung Gl. (4) und wir können das Potential
von Gl. (5) übernehmen:
V (R) =
1 Q
4πε◦ R
für (R ≥ a)
(8)
Diese Ergebnisse gelten für kugelsymmetrische Ladungsverteilungen ρ(~r) = ρ(r). Auch in
diesem Fall konnte das Integral der Flussregel (Gauss’scher Satz) unter der Ausnutzung
der Symmetrieeigenschaften gelöst werden.
Für
eine kontinuierliche Ladungsverteilung mit der Dichte ρ(~r) lässt sich der Gauss’sche
Satz auch in differentieller Form schreiben. Ist A die Oberfläche eines Volumenelementes
dτ = dx · dy · dz, das die Ladung dQ = ρ · dτ enthält, so ist der Feldfluss dΦ Gl. (7) durch
Ez (z+dz)
z
die einzelnen Oberflächenelemente dieses Würfels:
6
6
»
»»
dx
Ex (x)
q
1
³
³
dz
Ey (y)
(x,y,z)
1 y
³³
³³ Ey (y+dy)
1
³
³
´´
dy
Ez (z)
Ex (x+dx)
dΦ = [Ex (x + dx) − Ex (x)] dydz + [Ey (y + dy) − Ey (y)] dzdx+
x
-
+[Ez (z + dz) − Ez (z)] dxdy =
ρ
dxdydz
ε◦
Dividieren wir durch das Volumenelement dx dy dz und nehmen den Grenzfall
dx, dy, dz → 0, so erhalten wir die partielle Differentialgleichung
ρ
∂Ex ∂Ey ∂Ez
+
+
=
∂x
∂y
∂z
ε◦
⇒
~ =∇·E
~ = ρ
div E
ε◦
1. Maxwell
Gleichung
Diese 1. Maxwellsche Gleichung ohne Medium formuliert die Tatsache, dass
~ sind9 .
die Quellen des elektrischen Feldes E
~
Das E-Feld
wurde aus der konservativen Coulomb-Kraft abgeleitet und
mit dem Gradienten des Potentials V nach Gl. (3) dargestellt werden zu
9
Ladungen
kann daher
~ = −∇V .
E
Man vergleiche dieses Ergebnis mit der Kontinuitätsgleichung in der Hydromechanik
(Phys AI Kap.12.3.1.) bei der keine Quellen auftraten und in Analogie ρ = 0 gesetzt wurde.
10
(9)
Verknüpft man die beiden Gleichungen (9) und (3) miteinander, so erhält man wie auch
in der Hydromechanik (Phys AI Kap.12.3.5.):
~ = ∇ · ∇V = div grad V =
−∇ · E
ρ
∂2V
∂2V
∂2V
∆V
=
−
+
+
=
∂x2
∂y 2
∂z 2
ε◦
Poisson’
(10)
Diff.gl.
Die beiden Gleichungen (3) und (10) sind differentielle Beziehungen10 zwischen den Quel~ r) bzw. V (~r). Es sind die fundamentalen
len ρ(~r) und den von ihnen erzeugten Feldern E(~
Differentialgleichungen der Elektrostatik und als solche eine direkte Konsequenz des Coulombschen Gesetzes.
Aus der Poisson’schen Differentialgleichung11 kann für eine vorgegebene Ladungsverteilung im Prinzip das Potential und mit Gl. (3) das elektrische Feld berechnet werden. Für
kugelsymmetrische Verteilungen ρ(~r) = ρ(r) sind die Lösungen oft einfach, man beachte
dabei, dass im Aussenraum immer das reine Coulombfeld V (r) ∝ 1/r herrscht12 . Für nicht
kugelsymmetrische Verteilungen entwickelt man oft das Potential nach Momenten der Ladungsverteilung (vgl. auch Kap. 2.3), z.B. Quadrupolmomente und Hexadekapolmomente
eines deformierten (nichtkugelsymmetrischen) Atomkerns oder einer nichtkugelsymmetrischen Elektronenhülle in der Atomphysik (z.B. Quadrupol-Hf-Struktur, NQR).
2.4.1
Feldlinien oder Stromlinien eines Vektorfeldes
†
Ein skalares Feld (z.B. Potential einer konservativen Kraft oder eines elektrischen Feldes) kann direkt dargestellt werden13 als Flächen mit V =konst. (z.B. Kugelflächen für
eine Punktladung, Ebenen im Parallelkondensator). Der Vektor F~ (~r) eines Vektorfeldes
dagegen kann nur am Ort ~r als ein Vektor dargestellt werden (z.B. Figur Seite 6). In
der Hydrodynamik (siehe Phys.AI Kap.12.3.3) geben die Stromlinien eines vektoriellen
Geschwindigkeitsfeldes die räumliche Bewegung eines Flüssigkeitselementes wieder. In der
Elektrostatik bezeichnen die Feldlinien die Startrichtung einer ruhenden Ladung in dem
Feld senkrecht zu den Potentiallinien. Feldlinien und auch Stromlinien sind damit die
räumlichen Kurven des Feldes, deren Tangenten dieselben Richtungen (nicht Betrag) wie
die Feldvektoren haben, d.h. es gilt14 F~ (~r) k d~r und damit
→
P
dr
F~ (~r) × d~r = 0
→→
F(r)
r→
(11)
Dies ist die vektorielle Differentialgleichung der Feldlinien. In
Komponenten ist Fx dy − Fy dx = 0, Fy dz − Fz dy = 0
und Fz dx − Fx dz = 0 bzw.
dy
Fy
=
,
dx
Fx
Fz
dz
=
,
dy
Fy
Fx
dx
=
dz
Fz
10
(12)
In der Gl. (10) ist, wie schon in der Hydromechanik (Phys AI Kap.12.3.5.), ∇ · ∇ = ∆ der
Laplace Operator.
11
eine inhomogene Potentialgleichung. Die homogene Potentialgleichung wäre ohne Ladungen ∆V = 0.
12
Vergleiche dasselbe Problem für das Gravitationspotential einer homogen mit Masse verteilten Kugel.
13
R.Rothe ’Höhere Mathematik’ Teil III, S.129, 1953 Teubner,
W.R.Smythe ’Static and Dynamic Electricity’ Mc Graw Hill S.7 1968
14
~ wobei λ eine Proportionalitätskonstante ist, damit wird
Man kann auch setzen d~r = λE,
dx
dy
dz
=
=
=λ
Ex
Ey
Ez
⇒
dy
Ey
=
dx
Ex
usw. in Übereinstimmung mit Gl.(12).
11
Die Lösungen dieser gekoppelten Differentialgleichungen sind als Funktion einer unabhängigen Variablen t z.B. mit t = x zu bestimmen. Da in den Gl.(12) nur die Verhältnisse der Komponenten der Feldvektoren auftreten, sind die Feldlinien unabhängig von
der Stärke des Feldes, das sich längs der Feldlinien ändert.
Vereinfacht nur in der zweidimensionalen x − y-Ebene mit Fz = 0, dz = 0 gilt
für die Feldlinien15
dy
Fy (x, y)
=
.
dx
Fx (x, y)
(13)
1. Das Dipolfeld zweier Ladungen im Abstand 2a
Als ein Beispiel soll das Dipolfeld zweier Ladungen q1 und q2 berechnet werden.
y
→
F(x,y)
r1
r2
q1
a
a
q2
4πε◦ Ex =
x
q1 x + a q2 x − a
·
+ 2·
,
r12
r1
r2
r2
4πε◦ Ey =
q1 y q2 y
· + ·
r12 r1 r22 r2
mit r12 = (x + a)2 + y 2 , r22 = (x − a)2 + y 2
x−a
r12
r22
x+a
2
, v=
und damit
=
u
+1,
= v 2 +1 (14)
Mit der Substitution u =
y
y
y2
y2
q2 v
q1
q2
q1 u
+ 2
, 4πε◦ Ey = 2
+ 2
wird 4πε◦ Ex = 2
2
3/2
2
3/2
2
3/2
y (1 + u )
y (1 + v )
y (1 + u )
y (1 + v 2 )3/2
dy
Ey
q1 (1 + v 2 )3/2 + q2 (1 + u2 )3/2
=
=
dx
Ex
q1 · u(1 + v 2 )3/2 + q2 · v(1 + u2 )3/2
Mit Gl.(14) ist x =
dy = −
a(u + v)
,
u−v
2a
(du − dv),
(u − v)2
y=
2a
,
u−v
dx =
dy
dv − du
=
dx
u dv − v du
q1 (1 + v 2 )3/2 + q2 (1 + u2 )3/2
dv − du
=
u dv − v du
q1 · u(1 + v 2 )3/2 + q2 · v(1 + u2 )3/2
für u und v
Z
du
q2 (1 + u2 )3/2
=−
,
dv
q1 (1 + v 2 )3/2
(15)
a(du + dv) a(u + v)
−
(du − dv),
u−v
(u − v)2
und mit Gl.(15) erhält man
und die Differentialgleichung
die einfach integriert werden kann
Z
q1 u
q2 dv
q1 du
qv
√ 2
=
−
= konst. ⇒ √
+
=C
2
3/2
2
3/2
(1 + u )
(1 + v )
1 + u2
1 + v2
Mit Gl.(14) sind dann
q1 (x + a)
q
(x + a)2 + y 2
+q
q2 (x − a)
(x − a)2 + y 2
=C
(16)
die Feldlinien des elektrischen Dipols. Gl.(16) muss numerisch gelöst werden mit verschiedenen Werten für C =konst. Das entspechende skalare Potential V (~r) ist numerisch
aus
q2
q1
q1
q2
q
q
+
=
V (~r) =
+
(17)
4πε◦ r1 4πε◦ r2
4πε◦ (x + a)2 + y 2 4πε◦ (x − a)2 + y 2
Fx (x, y)
dy
=−
ist dann die Differentialgleichung der Linien eines Feldes, das senkrecht auf den
dx
Fy (x, y)
Feldlinien der Gl.(13) steht und das damit auch das Potential darstellen kann.
15
12
berechenbar. Die Potentiallinien Gl.(17) stehen senkrecht zu den Feldlinien Gl.(16). In den
Figuren sind die Feldlinien und Potentiallinien für die beiden Fälle q2 = −q1 und q2 = q1
dargestellt. Man beachte, dass die Orthogonalität in den Figuren nur gewährleistet ist,
wenn die Massstäbe der x- und y-Achse identisch sind.
y/a
→
y/a
E
→
E
V
+
-
V
+
x/a
+
x/a
Potential und Feld eines elektrischen Dipols
4πεo aV/q→V=0, 1/4, ... 15/4;
C/q→C=0, 1/8, ... 2
V=0 entspricht der y-Achse
Feld und Potential zweier gleicher Ladungen
4πεo aV/q→V=3/4, ... 15/4;
C/q→C=0, 1/8, ... 2
Die Stärke des Feldes ist proportional zur Dichte der Feldlinien bzw. zur Dichte der
Potentiallinien. Die Potentiallinien für q1 = q2 = q sind für V > 2 zwei separate Linien, für
V < 2 eine gemeinsame Linie und für V = 2 zwei separate Linien mit einem gemeinsamen
’Kreuzungspunkt’; die Feldlinien für C = 0 entsprechen der y- und für C = 2 der x-Achse.
2. Berechnung der Feldlinien mit dem Gaussschen Satz
Die Feldlinien für den speziellen Fall von collinearen Ladungen längs der x-Achse und
damit auch für den Dipol mit zwei Ladungen, können mit dem Gaussschen Satz einfacher als mit der allgemeineren, vorhergehenden Methode aufgrund der Symmetrie der
Anordnung berechnet werden. Die in der x-y-Ebene verlaufenden Feldlinien sind rotationssymmetrisch um die x-Achse angeordnet.
Der Fluss durch die Fläche A bei xa innerhalb der Rotationsfläche der Feldlinien ist gleich dem Fluss durch
Feldlinie
(x,y,z)
y
die Fläche B bei xb , da keine Feldlinien durch die Rotationsfläche austreten. Der gesamte Fluss C durch A
ist gegeben durch den Fluss aller Einzelladungen qi zu
q1
q2
qn
C = q1 Ω1 + q2 Ω2 · · · + qn Ωn .
α1 α2 αn
x
Er ist eine Konstante für alle x.
B
A
z
Ω1 Ω2 Ωn
xb
xa
Ωi =
Zαi
Z2π
ϑi =0 ϕi =0
sin ϑi dϑi dϕi
1
= (1 − cos αi )
4π
2
sind die auf 4π bezogenen Raumwinkel der Ladungenqqi mit den Winkeln αi gegenüber
der Fläche A bei xa . Damit ist mit cos αi = (x − xi )/ (x − xi )2 + y 2
C=
n
X
qi
i=1
2
(1 − cos αi ) ⇒ −C +
n
X
qi
i=1
13
2
= C′ =
n
X
i=1
q
qi (x − xi )
(x − xi )2 + y 2
,
d.h. für zwei Ladungen im Abstand 2a symmetrisch zu x = 0 ist
r
y 6
q1
r
q2
a a
C′ = q
-x
q1 (x + a)
(x + a)2 + y 2
+q
q2 (x − a)
(x − a)2 + y 2
die Gleichung für die Feldlinien in Übereinstimmung mit Gl.(16).
Eine weitere Methode zur Bestimmung der Feldlinien sind
die konformen Abbildungen, wie sie auch in der Hydrodynamik (vgl. Phys.AI) angewendet werden. Ein Beispiel
für das elektrostatische Feld und Potential eines geladenen
Ellipsoiden ist in der Figur gezeigt.
x2
cosh2 a
x2
cos2 a
2.5
+
−
y2
sinh2 a
y2
sin2 a
=1
=1
Potential (Ellipsen)
Feldlinien (Hyperbeln)
Elektrostatische Felder von geladenen Leitern
Man unterscheidet elektrische Leiter, in denen elekrische Ladungen infolge der Anwesenheit eines elektrischen Feldes zu fliessen beginnen, wie z.B. Metalle, sowie Isolatoren, in
denen dies nicht der Fall ist. Als erstes behandeln wir nur die elektrostatischen Eigenschaften von Leitern.
In einem zunächst neutralen Leiter erzeugt eine zusätzlich in den Leiter gebrachte Ladung ein elektrisches Feld und damit ein Kraft und Bewegung auf die freien Elektronen
des Leiters. Es entsteht ein interner elektrischer Strom, der die Ladungen so lange verschiebt, bis die internen Felder auf Null reduziert worden sind. Es gibt dann keine Ströme
mehr und ein stationärer Zustand ist erreicht. An der Oberfläche des Leiters kann noch
ein elektrisches Feld existieren, es muss jedoch senkrecht zur Oberfläche stehen, da sonst
Ladungen an der Oberfläche verschoben werden könnten. In diesem stationären Fall ist
~
die Oberfläche eine Potentialfläche, da diese senkrecht zum E-Feld
steht.
Das Potential V◦ an der Oberfläche muss dann auch im Innern des Lei~
→
ters herrschen. Bildet man nämlich das Linienintegral des E-Feldes
längs
E
E=0
eines Weges von einem Punkt 1 im Innern zu einem Punkt 2 auf der
.
1
2
Leiteroberfläche, dann gilt:
V
V1 − V2 =
r
Z2
~ innen d~s = 0
E
1
⇒
V1 = V2 = V◦ = konst.
Der Ort der Ladungen kann mit dem Gauss’schen Satz bestimmt werden. Ist A die Oberfläche des Leiters mit der totalen Ladung Q, A′ eine geschlossene Fläche ausserhalb und
A′′ eine geschlossene Fläche innerhalb von A, dann gilt:
Z
Q
′
Enaussen dA = ,
Φ(A ) =
ε◦
′
Leiter
A
A''
A'
′′
Φ(A ) =
Z
A′′
A
14
Eninnen dA = 0,
~ innen = 0.
da E
′
′′
Diese Beziehungen gelten auch für den Grenzfall A → A und A → A, Rd.h. die Ladung
Q sitzt an der Oberfläche mit einer Flächenladungsdichte σ(~r) mit Q = A σ(~r) dA.
~ ◦ an der Oberfläche und σ erhält man aus dem
Den Zusammenhang der Feldstärke E
Gauss’schen Satz angewandt auf einen infinitesimalen Zylinder mit der Grundfläche
innerhalb und der Deckfläche ausserhalb des Leiters, sowie
→
→
Eo
dA
den Mantelflächen senkrecht zur Oberfläche:
+ +++ + ++ + + +
+ + + + ++
→
++
σ
E1=0
~·E
~◦ =
dΦ = dA
σ dA
,
ε◦
~kE
~ ◦ ⇒ E◦ =
mit dA
σ
ε◦
Das Feld an der Oberfläche ist damit der Ladungsdichte an der betreffenden Stelle proportional. Zusammenfassend:
1. Im Gleichgewicht ist E im Innern gleich null. Die freien Ladungsträger
werden sich im Leiter solange verschieben, bis E = 0.
2. Im Innern eines Leiters gibt es keine Nettoladungen
(sonst wäre E innen 6= 0).
3. Beim geladenen Leiter sitzt die Ladung an der Oberfläche.
4. Der gesamte
Leiter besitzt im Gleichgewicht dasselbe Potential
R innen
~
V1 − V2 = E
· d~r = 0.
5. Das E-Feld steht senkrecht auf der Oberfläche (Äquipotentialfläche).
6. Das E-Feld an der Oberfläche beträgt:
E=
σ
,
ε◦
σ = Oberflächenladungsdichte [As/m2 ]
Auf Leitern mit einer unregelmässigen Oberfläche ist die Flächenladungsdichte nicht
konstant wie im folgenden gezeigt wird.
2.5.1
Elektrische Felder an Spitzen
Zwei geladene, weit voneinander entfernte Kugeln, die mit einem dünnen Draht miteinander verbunden sind, haben das gleiche Potential mit Gl.(8) ist
1 q2
q1
R1
1 q1
R2
#Ã
=
⇒
=
V =
R
1
¶³
4πε◦ R1
4πε◦ R2
q2
R2
¡
q2 ¡
q1
q
q
2
1
µ´
,
σ2 =
und σ1 =
"!
2
4πR1
4πR22
V
V
15
σ1
R1 R22
R2
q1 R22
=
=
· 2 =
2
σ2
q2 R1
R2 R1
R1
⇒
oder σ1 R1 = σ2 R2 .
An scharfen Kanten oder Spitzen mit kleinem R ist also σ und
~ gross. Übersteigt E
~ einen Wert von ca. 3 · 106 V/m, so
damit E
wird die Luft leitend und es bildet sich eine Spitzenentladung
aus. Für grössere Ladungen muss man am Leiter Spitzen und
scharfe Ecken vermeiden.
2.5.2
Influenz
+
Q=0
++ Ei=0
++
+++
- - - - + Q>0
- +
-+
-+
+
+
- - ----
2.5.3
+
+
+
+
+
+
+
Die Influenz beruht auf der freien Beweglichkeit der Ladungen in einem Leiter, d.h. die Trennung von positiver
und negativer Ladung eines anfänglich neutralen Leiters.
Bringt man in die Nähe eines ungeladenen Leiters eine Ladung Q, so wird auf diesem eine Oberflächenladung durch
die Coulombkraft influenziert. Das resultierende
Feld der
R
Ladung Q und der Oberflächenladungen Oberfläche σ dA = 0
muss im Innern des Leiters verschwinden. Durch Erden des
Leiters kann Ladung vom gleichen Vorzeichen wie Q abfliessen. Der Leiter wird dadurch geladen.
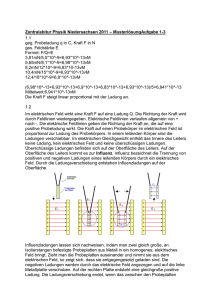
Faradaysches Becherexperiment und van de Graaff Generator
In einem Leiter mit einem Hohlraum muss die
+
+
+
+
+
+
+
+
Ladung auf der äusse- +
+ +
+
+
- +
+
+
Q
ren Oberfläche sitzen und
+ +
+
+
+
- +
+ -+
+
der Hohlraum ist feldfrei.
+
+
+
- + + + +
+ + + +
+ + + +
Qa
Nach diesem Prinzip ar+ + V
+ + V
+ + V
beitet der Faradaykäfig
(A)
(B)
(C)
(D)
zur Abschirmung
elektrostatischer Felder sowie das Faradaysche Becherexperiment . Bringt man eine geladene Metallkugel (Ladung Q) ohne Berühren in eine nicht geladene leitende Hohlkugel,
dann zeigt das Elektrometer die Spannung V an (A), durch Influenz werden die sich vorher
kompensierenden positiven und negativen Ladungsträger separiert. Beim Herausnehmen
wird wieder V = 0 (B). Beim Berühren des Bechers im Inneren zeigt das Elektrometer
aussen wiederum V (C), auch wenn die Kugel wieder herausgenommen wird, die positiven
Ladungen der Kugel und die negativen der Hohlkugel im Inneren haben sich kompensiert.
Die Hohlkugel ist nun mit Q aufgeladen16 . Der Gauss’sche Satz Gl. (7) mit der Fläche im
~ = 0 und ausserhalb E
~ 6= 0
Innern des Metalls d.h. E
+
+
+
Qi
ergibt:
I
+
+
~ · dA
~ = Qinnen = 0
E
ε◦
+
+
⇒ Qi = −Q
⇒ Qa = −Qi = Q.
Die Ladung auf der äusseren Oberfläche ist gleich Q. Dieser Vorgang kann mit zunehmender Spannung V mehrmals wiederholt werden.
16
Eine einfachere Überlegung: Die Ladung +Q der Kugel verteilt sich beim Berühren im Innern der
~ = 0 ist, die Kugel ist entladen.
Hohlkugel auf ihrer äusseren Oberfläche, so dass im Innern E
16
Der Van de Graaff Generator benutzt das Prinzip des Faradayschen Becherexperimentes, um hohe Spannungen zu erzeugen (vgl. die Figur):
Das nicht leitende Seiden- oder Plastikband wird bei C
A
durch Reibung oder effizienter durch eine Koronaentladung
+
aufgeladen und trägt die Ladung in das feldfreie Innere
F
der Metallhohlkugel A, wo sie bei F kontinuierlich übertragen wird (hohes E-Feld zwischen Spitzen und Band). Die
Hohlkugel kann so auf rund 1 MV geladen werden. Spannungsbegrenzend ist nur die Sprühentladung. Durch Betreiben des Van de Graaffs in trockenem N2 , CO2 sowie
bei erhöhtem Druck sind höhere Spannungen bis 15 MV
C
möglich (am alten Physik-Institut 5.5 MV). Ionen (ProD
+20'000 V
tonen und schwerere ionisierte Kerne mit positiver La~
dung) werden in einem Vakuum-Strahlrohr von der positiven Elektrode A nach Erde beschleunigt.
Beim
Charging belt
Terminal
Negative
Tandem Van de Graaff werion
Deflection
den vom Erdpotential negative
+++++
source
magnet
Ionen zur positiven Elektrode
beschleunigt. In der HochspanAnalyzing
+++++
nungselektrode werden negatimagnet
Input
ve Ionen z.B. H− mit einem
Target
Positive ion beam
Stripping canal
negative ions
Stripper umgeladen17
und darauf auf Erdpotential weiter beschleunigt. Der Tandem kann so kinetische Energien
von rund 30–40 MeV des Ions liefern.
2.5.4
Berechnung der Felder von Leitern
Die Felder geladener Leiter können nicht mehr einfach durch Superposition berechnet
werden, da die Ladungen beweglich sind. Kommt eine weitere Ladung in die Nähe, so
verschieben sich die vorhandenen so, dass die Leiter feldfrei bleiben. Es gibt zwei Typen
von Problemen:
1. Gegeben sind die Leiter 1, 2,. . . n und ihre Potentiale V1 . . . Vn . Gesucht sind die
Ladungen Q1 . . . Qn . Im ladungsfreien Gebiet gilt die Poissongleichung
∆V = −
ρ
= 0,
ε◦
die mit den Randbedingungen, den vorgegebenen Potentialen V1 . . . Vn an den Oberflächen, gelöst wird. Die Lösung ist eindeutig
R
~
V = V (x, y, z) → E(x,
y, z) → σi → Qi = Ai σi dA.
2. Gegeben sind die Leiter 1, 2,. . . n und ihre Ladungen Q1 . . . Qn . Die Potentiale lassen
sich in einfachen Fällen mit dem Gauss’sche Satz lösen. Die Lösungen sind wieder
eindeutig.
17
Negative Sauerstoffionen O− können im Stripper im Extremfall vollstädig zu O8+ ionisiert werden.
Für eine sechsfache Ionisation erreicht man dann mit z.B. 5 MV Beschleunigungsspannung eine Energie
von 5·7 = 35 MeV. Ein weiterer Vorteil des Tandem ist, dass Ionenquelle und der beschleunigte Ionenstrahl
auf Erdpotential liegen.
17
Im allgemeinen sind Probleme dieser Art jedoch oft nicht exakt lösbar, es müssen dann
Näherungsmethoden oder das Experiment mit einem Ausmessen der Felder angewendet
werden. In einfachen Fällen ist der Begriff der Kapazität nützlich.
2.6
Die Kapazität elektrischer Leiter
Ein einzelner geladener Leiter hat ein Potential auf seiner Oberfläche, das proportional
zur aufgebrachten Ladung ist und nur von der Form des Leiters abhängt, d.h. Q ∝ V .
Den Proportionalitätsfaktor bzw. Geometriefaktor definiert man als
. Q
C=
V
die Kapazität des Leiters
(18)
Für eine geladene Kugel ist das Potential Gl. (8)
#Ã
V (r)
r
²¯
µ
¡
¡
R
±°
"!
V (r) =
1
Q
·
4πε◦ r
und an der Oberfläche 4πε◦ R =
Q
= C.
V (R)
gibt also die Ladung pro Potentialeinheit und damit das FasC = VQ
(R)
sungsvermögen, die Kapazität des Leiters an18 .
Die gegenseitige Kapazität zweier Leiter ist definiert für zwei Leiter, die entgegengesetzt gleiche Ladung tragen, wenn ihre Potentialdifferenz unabhängig ist von der Anwesenheit weiterer Ladungen. Die Potentialdifferenz ist proportional zur Ladung Q und
hängt von der Form der Leiter und ihrer räumlichen Anordnung ab. Die beiden Leiter
bilden einen Kondensator19 .
Es ist C = V1 Q
die Kapazität des Kondensators.
−V2
+
+
+
+
+
++
+
+
+
-- - -Q
+
V1
+
+
+
- - V
2
+
+
+
+
Q
+
Ihre Einheit ist 1 Coulomb/Volt=1 Farad=1 Cb/V=1 F.
In der Praxis werden meistens viel kleinere Kapazitäten benützt:
1 µF=10−6 F, 1 nF=10−9 F, 1 pF=10−12 F,
Mit einem Kondensator grosser Kapazität kann man viel Ladung
bei kleiner Potentialdifferenz V1 − V2 speichern.
Dies ist wichtig, da wegen der begrenzten Isolationsfähigkeit der Luft das
Potential eines Leiters nicht beliebig gesteigert werden kann. Kondensatoren
spielen in der Technik eine grosse Rolle. Sie können, um die gewünschte
Grösse zu erhalten, in Parallel- oder in Serienanordnung geschaltet werden:
An jedem der n Kondensatoren liegt die
Parallelanordnung (addiere Q)
V1
V1 gleiche Potentialdifferenz. Die Gesamt⇒C
ladung gleichen Vorzeichens ist mit der
C1
C2
Cn
V2
V2 Kapazitätsdefinition:
n
n
X
X
Qi
Qi , Ci =
Q = Q1 +Q2 +· · ·+Qn =
Ci = C(V1 −V2 )
⇒ Q = (V1 −V2 )
V1 − V2
i=1
i=1
Kondensatorsymbol
18
Die Kapazität wurde früher wegen dieses linearen Zusammenhanges mit dem Radius der Kugel auch
in cm angegeben: 1 cm=(1/9)·10−11 F.
19
Die Leydener Flasche, eine innen und aussen mit Goldfolie beschichtete normale Flasche, war der erste
in Leyden im 18. Jh. entwickelte Kondensator. Benjamin Franklin fand heraus, dass die Flaschenform keinen Einfluss hatte, schaltete beschichtete Fensterscheiben parallel und versuchte mit diesem Kondensator
einen Truthahn zu töten: “I tried to kill a turkey but nearly succeeded in killing a goose.”
Die Kondensatorflasche wurde unabhängig auch von Heinrich Kleist erfunden.
18
Die Gesammtkapazität ist
C=
n
X
Ci
i=1
Serienanordnung (addiere V )
C1
C2
V1 V2
2.6.1
Cn
für Parallelschaltung
von Kondensatoren
Infolge der Influenz trägt jeder Kondensator die gleiche Ladung Q und die Potentialdifferenz V1 − Vn+1
zwischen Anfang und Ende der n Kondensatoren und
die Gesamtkapazität ist:
C
⇒
Vn+1 V1 Vn+1
n
X
1
Q
V1 − Vn+1 = Q
=
C
i=1 Ci
Vn
⇒
n
X
1
1
=
C
i=1 Ci
für Serienschaltung
von Kondensatoren
Beispiele von Kondensatoren
1. Der Kugelkondensator besteht aus zwei konzentrischen Kugeln mit den Radien
1
2
#Ã
µ
¡
¾»
~
¡
Das
E-Feld
ist auf den Raum zwischen den beiden Kugeln beschränkt
6 ¶³
6
~ r) = E(r).
~
R1 (Gauss’scher Satz) und es muss kugelsymmetrisch sein E(~
R2
µ´
?
½¼
?
"!
Es gilt mit dem Gauss’schen Satz (Gl. (7):
~
E(r)
R und R mit den Ladungen +Q und −Q.
µ
¶
ZR2
Q
Q
1
Q
Q
1
E(r) · 4π r =
⇒ E(r) =
, V1 − V2 =
dr =
−
ε◦
4πε◦ r2
4πε◦ r2
4πε◦ R1 R2
2
R1
E(r) =
Kapazität des
R1 R2
Q
V1 − V2 R1 R2
,
= 4πε◦
C=
(19)
2
r
R2 − R1 Kugelkondensators
V1 − V2
R2 − R1
Im Grenzfall R2 → ∞ erhält man wieder den Wert für die Einzelkapazität
C = 4πε◦ R1 der Kugel.
2. Der Plattenkondensator ist der Grenzfall von 1. mit R2 − R1 = d, R1 → ∞ und
V1 − V2
r ≈ R1 ≈ R2 . Mit Gl. (19) ist E(r) =
d
+ +++++ ++++
V
E
- - - - - - - - - -
Q = Aσ = ε◦ A
Das Feld ist ausser am Plattenrand im Innern homogen.
Auf der Platte sitzt eine gleichförmige Ladungsdichte
σ = ε◦ E. Unter Vernachlässigung der Randeffekte ist
mit der Plattenfläche A
V1 − V2
,
d
C=
Q
A
= ε◦
V1 − V2
d
Kapazität des
Plattenkondensators
Für A = 1 m2 und d = 1 cm wird C = 8.85 nF.
3. Bestimmung der Elementarladung
R.A. Millikan fand 1906 (Nobelpreis 1923), dass die elektrische Ladung von Öltröpfchen Q ein ganzzahliges Vielfaches einer Elementarladung ist:
Q = ne
n = 0, ±1, ±2, ±3, . . .
Jede Ladung Q besteht also aus einem Überschuss oder Mangel einer ganzzahligen
Anzahl n von Elektronen der Ladung e = −1.6021773(5) · 10−19 Cb, d.h. Q = ne.
19
Der Versuch von Millikan: Zwischen die Platten eines Kondensators werden mit
einem Zerstäuber mikroskopisch kleine Öltröpfchen geblasen. Die durch Reibung
geladenen Tröpfchen erfahren im E-Feld (E = V /d) eine Kraft qE. Der Versuch
wird in zwei Schritten durchgeführt:
• Durch Variation von V wird das Tröpfchen zum Schweben gebracht. Es gilt dann: qE = mg = qV /d.
neE
c6
mg
?
V
• E abschalten. Das Tröpfchen fällt frei. Die sich einstellende konstante Fallgeschwindigkeit v∞ beträgt: 6πηav∞ = mg.
Zwischen m und dem Radius a besteht die Beziehung: m =
s
4π 3
a ρ. Aus den drei
3
3
d 2η 3 v∞
Gleichungen folgt: q = 9π
.
V
gρ
Für sehr kleine Tröpfchen müssen als Folge der Brownschen Bewegung Korrekturen
angebracht werden (siehe Praktikumsversuch). Experimentell bestimmt werden die
Dichte des Öles ρ, die Viskosität η der Luft, die Geschwindigkeit v∞ des Tröpfchens
ohne E-Feld, der Plattenabstand d und die Spannung V , bei der das Tröpfchen
schwebt.
Es ist bemerkenswert ehrlich, dass Millikan in seiner Arbeit [Phil. Mag. J. of Science (London) Vol.6 No.110 1919]
über eine einzige beobachtete 2/3e-Ladung berichtet, wie sie heute für Quarks gefordert wird20 :
’ . . . not agreed with the result of the other observations, and consequently I felt obliged to discard them as it was.
In the third place, I have discarded one uncertain and unduplicated observation apparently upon a singly charged
drop, which gave a value of the charge on the drop some 30 per cent lower than the final value of e. With these
exeptions all of the data in our note-books are given below. ... ’
4. Feld und Potential des elektrischen Dipols (Vgl. Übung 1, Kap. 2.4.1)
q
V =
4πε◦
-q
~ℓ
+ +q
- ϕ r r+
r-
Ã
!
2
1 p~ · ~r ~
1
1
~ ≃ 3(~p · ~r)~r − r p~ .
, V (r ≫ ℓ) ≃
−
,
E
=
−
∇V
r+ r−
4πε◦ r3
4πε◦ r5
Das elektrische Dipolmoment (vgl.
Gl. (20) als p~ = q · ~ℓ mit ~ℓ dem Abstand zwischen +q und −q.
Monopol:
V ∝ 1/r
Dipol:
V ∝ 1/r2
Quadrupol: V ∝ 1/r3
etc.
E ∝ 1/r2
E ∝ 1/r3
E ∝ 1/r4
Beispiele von permanenten Dipolmomenten21 p in 10−30 mAs:
HCl
CO
H2 O
NH3
3.43
0.40
6.2
5.0
5. Der Zylinderkondensator besteht aus zwei konzentrischen Zylindern der Länge
ℓ, die gross ist gegenüber den Radien R1 und R2 . Das Feld ist axialsymmetrisch und
existiert bis auf Randeffekte nur im Raum zwischen den Zylindern, d.h. E = E(r).
20
Neue Suchen nach freien Quarks mit 2/3 oder -1/3 Ladungen waren bisher alle erfolglos:
Phys.Rev.Letters 38(1977)1011 u. 1255, Phys.Rev.Letters 48(1981)947, Phys.Rev.Letters 51(1983)731,
Phys.Rev.Letters 54(1985)1472, Phys.Letters 153(1985)188, Ann.Rev.Nucl.Part.Sc. 28(1978)327,
Rev.Mod.Phys. 49(1977)717.
21
Veraltete Einheit: 1 Debye = 10−18 cm5/2 g1/2 s−1 = 3.336 · 10−30 mAs ≃ e · 0.208 Å
20
Mit dem Gauss’schen Satz mit R1 < r < R2 ist
ℓ
+Q
2πrℓ E(r) =
V1
V2
R1
R2
V1 − V2 =
-Q
C=
ZR2
E dr =
R1
ℓ
Q
= 2πε◦
V1 − V2
ln(R2 /R1 )
Q
Q
⇒ E(r) =
ε◦
2πε◦ rℓ
R2
V1 − V2
Q
ln
⇒ E(r) =
2πε◦ ℓ R1
r ln (R2 /R1 )
Kapazität des
Zylinderkondensators
6. Die Methode der Spiegelladung benutzt die Symmetrie der Ebene einer entsprechenden Anordnung von Ladungen. Zunächst sei das Feld eines elektrischen Dipols,
d.h. zwei Ladungen +Q und −Q im festen Abstand 2d nach dem Superpositionsprinzip berechnet. Im Punkt P der x-y-Ebene ist dann das Potential
y
S
-Q
-
x
+
+Q
r2
r1
P(x,y)
d
d
- S
+ +Q
d
1
V (x, y) =
4πε◦
µ
Q Q
−
r1 r2
¶
=
Q
1
1
q
−q
=
4πε◦
(d − x)2 + y 2
(d + x)2 + y 2
In der Symmetrieebene mit x = 0 ist das Potential überall null und die Feldlinien stehen senkrecht zu dieser
Ebene. In die Symmetrieebene könnte daher eine leitende Folie gesetzt werden ohne das Feld zu stören.
Dies ist aber das Potential und das Feld einer einzelnen punktförmigen Ladung
gegenüber einer leitenden Platte und die Spiegelladung −Q dient dann nur zur
Berechnung. Auf die Ladung +Q wirkt die anziehende Kraft der Spiegelladung,
diese Kraft spielt eine Rolle bei der Feldemission von Elektronen (Glühkathode).
2.7
Isotrope Dielektrika
Das Coulombsche Gesetz in der Form von Gl. (2) ist nur für die zwei Ladungen Q1 und Q2
im Vakuum gültig. Versuche mit der Cavendish-Drehwaage mit flüssigen oder gasförmigen
Isolatoren zwischen den beiden Ladungen ergeben stets Kräfte, die kleiner sind als jene,
die im Vakuum auftreten. Das Medium, der Isolator zwischen den Ladungen, nach M.
Faraday Dielektrikum genannt, hat also einen Einfluss auf die elektrischen Felder.
In der Natur gibt es keine vollkommenden Nichtleiter bzw. Isolatoren, jedoch ist der Ladungstransport in einem Isolator so gering, dass wir Isolatoren in sehr guter Näherung als
ideale Nichtleiter behandeln können. Isolatoren sind für das elektrische Feld durchlässig,
während Leiter das Feld abschirmen.
Man bezeichnet Isolatoren als Dielektrika.
R
~
Zum Spannungsbegriff V = Ed~r in einem Plattenkondensator mit Dielektrikum:
Für einem Plattenkondensator, in dem in der oberen Hälfte
2 s Dielektrikum s 1
ein Dielektrikum steckt, muss nach der Definition
der SpanR
s
s
~
3
4
nung als Arbeit pro Ladungseinheit W = q Ed~r = qV , die
Spannung zwischen den Punkten 2-1 und 3-4 gleich sein sowie
+
−
die Arbeit über den Weg 1-2-3-4 null sein. D.h.:
21
(i) Die Wege 2-3 und 4-1 laufen auf Äquipotentialflächen und die Arbeit ist null.
(ii) Aus der Nichtexistenz des Perpetuum mobile 1. Art muss für die Arbeit gelten
W1−2 = −W3−4 .
Die Spannungsdefinition mit oder ohne ein Dielektrikum bleibt damit gleich.
Der Einfluss nichtleitender Materie (Isolatoren, Dielektrika) auf elektrische Felder wurde in den vorhergehenden Kapiteln nicht betrachtet. Das Experiment zeigt jedoch folgende
Wirkung:
(i) Wird ein Dielektrikum zwischen die Platten eines geladenen Kondensators geschoben,
wobei sich die Ladung nicht ändert, so verkleinert sich die ursprüngliche Potentialdiffe~ oder der effektive Plattenabstand wird
renz V1 − V2 , resp. die elektrische Feldstärke E
reduziert. Die Verkleinerung hängt vom speziellen Material ab.
Q =konst.
¿
¿
+Q
+Q
′
′
6
¢A
¢A
~
~′ < E
~
E
d
E
?
?
?
¢ A V1 − V2
¢ A V1 − V2
ÁÀ
ÁÀ
=V′ <V
=V
−Q
−Q
(ii) Wird ein Dielektrikum zwischen die Plat²¯
ten eines geladenen Kondensators geschoben, +Q′
µ
¡
I
±°
¡
wobei mit einer angelegten Batterie die Span~
E
Q′ > Q
?
nung konstant gehalten wird, dann erhöht sich
′
V =konst.
die Ladung des Kondensators und es fliesst ein −Q
Strom.
Mikroskopisch liegt der Grund darin, dass auch Isolatoren aus positiven und negativen
Ladungen bestehen. Wird nun ein Isolator in ein elektrische Feld gebracht, so können
in den Atomen elektrische Dipolmomente induziert werden oder in Molekülen bereits
vorhandene Dipolmomente werden im Feld ausgerichtet.
.
~ℓ * +j
Das Dipolmoment wird definiert22 als
p~ = q · ~ℓ
(20)
−q ©©©
+q
©
−j
Der Abstand ~ℓ ist ein Mass für die Asymmetrie der Ladungen.
Es werden damit im äusseren elektrischen Feld positive und
~
6 6 6 6 6 6 6 6E
negative Ladungen gegeneinander verschoben; die Materie
± ± ± ± ± ± ± ± ± +σp
wird polarisiert. Während sich die Ladungen im Inneren des
± ± ± ± ± ± ± ± ±
Körpers immer noch aufheben, treten an den Oberflächen La± ± ± ± ± ± ± ± ±
dungen +σp , −σp auf, wobei der Körper als ganzes neutral
± ± ± ± ± ± ± ± ±
−σp bleibt; er besitzt nun ein elektrisches Dipolmoment. Daher
können auch Isolatoren in elektrischen Feldern Kräfte erfah~ * +j ~ ©ℓ©©
~ ren. Ein konstantes Feld erzeugt ein Drehmoment M
~ = q·~ℓ×E
~
F~ = −q E
F~ = q E
¾
−j©
und dreht die einzelnen Dipole, während ein inhomogenes
~ ausübt23 .
mit dem Ort sich änderndes Feld auf die Dipole eine Kraft F~ = ∇(q~ℓE)
Die Polarisation P~ eines Körpers ist definiert als Dipolmomente pro Volumeneinheit
22
Beachte: Die Richtung des Dipolmomentes ist definiert von der − zur + Ladung.
~ und
Nach Gl. (32) ist die Energie eines elektrischen Dipols in einem elektrischen Feld Wd = −~
p·E
damit ist die Kraft in einem inhomogenen Feld F~ = −∇Wd . Oder: Betrachtet man nur die x-Komponente,
∂
dann ist mit p~ = q~ℓ und ∆x = ℓx ⇒ Fx = q (E(x + ∆x) − E(x)) = q Ex ℓx .
|
{z
}
∂x
23
∂
∂x Ex ∆x
22
~ es gilt
p~/τ . Sie hat für isotrope Dielektrika die Richtung des angelegten Feldes E,
.
~
P~ = χe ε◦ E
·
¸
"
Cb
As V
=
·
Vm m
m2
#
(21)
χe ist die materialabhängige elektrische Suszeptibilität24 . Sie ist dimensionslos und
~ [Cb/m2 ]. Betrachten wir nun ein rechteckiges Stück
damit hat P~ die Dimension von ε◦ E
~ Das gesamte DipolmoDielektrikum der Dicke ℓ und der Fläche A im elektrischen Feld E.
ment ist Polarisation·Volumen, also P ·τ = P ·Aℓ. Anderseits ist ein Dipolmoment definiert
als Ladung· Abstand der Ladungen, q · ℓ, also muss hier P · A gleich der unbeweglichen
Polarisationsladungen σp A sein:
P · Aℓ = Qp · ℓ = σp · A · ℓ d.h. |P~ | = σp
−Qp = −σp A
σ ist die bewegliche und σp die feste Polarisationsflächenladungsdichte. Allgemein gilt Pn = σp . Die Normalkomponente
der Polarisation ist gleich der Flächenladungsdichte an der
σp
Oberfläche eines Dielektrikums. P~ zeigt mit Gl. (20) von −σp
ℓ
nach +σp .
Dies erklärt die Verkleinerung der Potentialdifferenz im Kondensator. Ausser den Ladungen auf der Kondensatorplatte treten entgegengesetzte Polarisationsladungen σp auf,
so dass die Feldstärke im Innern des Dielektrikums verkleinert wird. Für einen ebenen
Plattenkondensator gilt:
ε◦ E ′ = σ − σp ,
wobei E ′ das effektive Feld ist.
Ganz allgemein modifiziert die Anwesenheit polarisierLeiter
+Q = +σA
barer Materie das elektrische Feld. Statt nun mit der
++++++++++++++++
Polarisation und mit Polarisationsladungen zu rech−−−−−−−−−−−−−−−−
−Qp =−σp A
~ P~ E
~ Vac nen, ist es oft zweckmässig, ein weiteres Vektorfeld ein~ D
~ p Dielektrikum E
?
E
zuführen, die
? 6
+Qp =+σp A
PP
q½
P
½
¡
¾Q = σ A
p- p
~ P~
E
¶¶
?
?
++++++++++++++++
.
−−−−−−−−−−−−−−−−
~ =
~ + P~ (22)
Dielektrische Verschiebung D
ε◦ E
Leiter
−Q = −σA
Die Bezeichnung Verschiebung wurde von Maxwell eingeführt, um damit die Verschiebung der positiven und negativen Ladungen im Dielektrikum durch das äussere Feld zu
charakterisieren. Für den Fall isotroper Dielektrika25 gilt mit Gl.(21) und (22)
~
P~ = χe ε◦ E
und mit ε = 1+χe
~ = ε◦ E
~ + P~ = ε◦ (1 + χe )E
~ = ε◦ εE
~
D
"
Cb
m2
#
(23)
Die dimensionslose Materialkonstante ε heisst relative Dielektrizitätskonstante und χe
~ = ε◦ E.
~
die Suszeptibilität; im Vakuum ist χe = 0, ε = 1 und damit D
Dielektrizitätskonstanten ε und χe einiger Materialien
bei Normaldruck und 20◦ C; es ist immer ε > 1.
24
Die elektrische Suszeptibilität kann mit einer Federkonstanten k zwischen den zwei Ladungen inter~
~
pretiert werden kℓ = F = eE, p~ = e~ℓ = e2 E/k
damit ist P~ = e2 E/(k
τ ) und χe = e2 /(kε◦ τ ).
25
Isotrope Dielektika sind Gläser, Plastik, polykristalline Materialien und auch kubische Kristalle. Anisotrope Dielektika sind i.a. nichtkubische Kristalle mit einer Kristallstruktur, die in verschieden Raum~ steht nicht parallel
richtungen nicht gleich ist. Die Dielektrizitätskonstante ε ist dann ein Tensor und D
~ Die Dielektrizitätskonstante spielt in der Optik eine wichtige Rolle (z.B. Brechungsindex S.??).
zu E.
23
Material
ε
χe
Vakuum
1
0
He
1.000060 0.000060
Benzol
2.3
1.3
Bernstein
2.8
1.8
Paraffin
1.9 . . . 2.2
1.1
Wasser
81
80
Material
ε
χe
Luft
1.00059
0.0059
O2
1.000486 0.000486
Aceton
21
20
TiO2
40. . . 80 40. . . 80
Glas
5 ...7
4 ...6
Eis
3
2
Zusammenfassung der Grundversuche:
V=konstant
V = VVac
Q = εQVac > QVac
E = EVac
D = σ = εε◦ E = εε◦ EVac
C = Q/V = εCVac = εε◦ A/d
Q=konstant
V = VVac /ε < VVac
Q = QVac
E = EVac /ε < EVac
D = σ = εε◦ E = ε◦ EVac
C = Q/V = εCVac = εε◦ A/d
EVac , VVac und CVac sind die Grössen im Vakuum. Mit einem Dielektrikum kann die
Kapazität eines Kondensators um ε erhöht werden.
2.7.1
Der verallgemeinerte Gauss’sche Satz
Für den Kondensator mit einem Dielektrikum gilt mit dem Gauss’schen Satz Gl. (7) :
Leiter
EnL = 0
6
σ
++++++++++++++++
−−−−−−−−−−−−−−−−
σp
E
?n
Dielektrikum
I
~ A
~=
Ed
1 Z
1 Z
En dA =
(σ − σp )dA =
(σ − Pn )dA
ε◦
ε◦
oder mit Q der wahren Ladung ohne Polarisationsladung
++++++++++++++++
ε◦
−−−−−−−−−−−−−−−−
Leiter
und mit Gl.(22)
Z
~ = ε◦ E
~ + P~
D
ist
Z
En dA +
Z
Dn = ε◦ En + Pn
der allgemeine Gauss’sche Satz
I
Pn dA =
Z
σdA = Q
und damit
~ A
~=
Dd
Z
Dn dA = Q
sowie differentiell die 1. Maxwell Gleichung mit Dielektrikum
~ =ρ
∇·D
(24)
(25)
~
Der Fluss des D-Feldes
durch eine geschlossene Fläche ist gleich der Summe der einge~
schlossenen Ladungen. Die Polarisationsladungen sind im D-Feld
enthalten und dürfen auf
der rechten Seite der Gleichung nicht mitgezählt werden. Die differentielle Form Gl. (25)
ist die 1. Maxwell Gleichung mit einem Dielektrikum, sie wird analog zur 1. Maxwell
~ = ρ/ε◦ abgeleitet.
Gleichung ohne ein Dielektrikum ∇E
Elektrostatische Probleme mit Dielektrika können gelöst werden entweder mit den
~ σ, P~ , σp oder mit E,
~ σ, D.
~ Da die dielektrische Verschiebung D
~ die PolariGrössen E,
sationsladungen bereits einschliesst, müssen nur noch die wahren Ladungen berücksichtigt
werden26 . Die Feldstärke in einem Dielektrikum variiert im atomaren Bereich von Ort zu
Ort, sie kann daher nur als ein Mittelwert über einen grösseren Volumenbereich aufgefasst
werden und nicht atomistisch interpretiert werden.
26 ~
~ abgeleitet
D ist i.a. das einfachere Feld zur Berechnung, aus dem dann das physikalische Feld E
werden kann.
24
2.7.2
Beispiele zu Dielektrika
Das Verhalten der Feldstärken an den Grenzflächen.
a) Leiter-Dielektrikum Eine geschlossene Gauss’sche Fläche habe die Form einer
~ parallel zur Grenzfläche. E
~ und D
~
Pillenschachtel, mit der Grund- und Deckfläche dA
stehen senkrecht auf der Leiteroberfläche, im HInnern des Leiters sind beide Felder null. Mit
~ dA
~ = Q integriert über die geschlossene
dem allgemeinen Gauss’schen Satz Gl. (24) D
Fläche, wobei sich die Flächenintegrale über die Seitenflächen aufheben, gilt
Dielektrikum
D · dA = σ · dA also D = D⊥ = σ.
−ε ~ ¡
µE
¡
~
µ ¡
¡
+@ − D
Daraus folgt mit D = εε◦ E und D = ε◦ E + P sowie dass
¡ ~
+@¡−
@¡¡ ¡
µP
¡
@
P~ von −σp nach +σp zeigt (|P~ | = −σp siehe Gl. (20))
+ @¡
@ @−
+ @−
@
@
¶
µ
³ dA
³
D
σ
1
@
@+ @@
−
E=
=
⇒ σp = −P = ε◦ E − D = −σ 1 −
+¡
¡−
@
@
Leiter E = 0 @
εε◦
εε◦
ε
+@ σp
σ@
D=0
ein Zusammenhang zwischen σp auf dem Dielektrikum und σ auf dem Leiter.
b) Dielektrikum-Dielektrikum
Trägt die Trennfläche nur Polarisationsladungen d.h.
@
D1n ¡
µ
@
σp 6= 0 und σ = 0, so gilt mit Gl. (24), wobei sich die Flächenin¡
@
¡
R
@
@
¡³³
1
@ @@
³
tegrale über die Seitenflächen der Pillenschachtel aufheben
~1
¡
³
D
~2 ©
*@@
©
@¡
D
µ
D
1n dA − D2n dA = 0 also D1n = D2n bzw. ε1 E1n = ε2 E2n .
@ @@ ε
©©¡
1
D2n @¡
¡
~ ist an der Trennfläche stetig. Die
R¡
@
Die Normalkomponente von D
ε2 @
@
~ ändert sich sprunghaft.
Normalkomponente von E
A
E1t
@
µ@
¡
@
¡
¡
R
@
@
¡
1
³
D
@ @@
³³ ~
¡
³@
E1
*
©
~
@
E2©©¡
µ@ @
@
©
B
@
© ¡ @
¡
¡
© ¡
@ ε1
C
@
@
ε@
R¡
2
E@
2t
Wird ferner ein geschlossener Weg ABCD betrachtet, wobei
AB=CD=
ℓ und ℓ parallel zur Trennfläche liegt, so gilt mit
H
~ ~ℓ = 0 integriert über den geschlossenen Weg, wobei sich
Ed
die Wegintegrale über die Seitenstrecken senkrecht zur Trennfläche aufheben (das elektrostatische Feld hat ein Potential und
~ = 0)
es gilt ∇ × E
E1t · ℓ − E2t · ℓ = 0 also
E1t = E2t
bzw.
D1t
D2t
=
.
ε1
ε2
~ ist an der Trennfläche stetig. Die Tangentialkomponente
Die Tangentialkomponente von E
~ ändert sich sprunghaft.
von D
Diese Eigenschaft führt zum Brechungsgesetz der Feldlinien an der Trennfläche
(vgl. das Brechungsgesetz in der Optik). Es ist
>E
½
~1
α1 ½½ 6
tan α1 = E1t /E1n und tan α2 = E2t /E2n und damit lautet das
ε1
½ E E1n
E2n
6
E2t
½
µ
¡
¡
¡α2
¡
~2
¡E
1t
ε2
Brechungsgesetz mit E1t = E2t
tan α1
E2n
ε1
=
= .
tan α2
E1n
ε2
c) Plattenkondensator mit einem Teil eines Dielektrikums
Um die Durchschlagfestigkeit eines Plattenkondensators bei konstanter Spannung zu
verbessern, steckt jemand ein Dielektrikum zwischen die Platten, das nur einen Teil
25
2
des Plattenabstandes füllt. Es gilt für den Abstand dε ohne DielektriV =konst. kum E0 = V und mit Dielektrikum
d+dε
D
=
ε
E
= D2 = εε◦ E2 ⇒ E2 = E1 /ε
ε6
1
◦
1
dε
?
6
ε◦ d
?
V =
Z2
1
1
Ã
1
dε
E ds = E1 d + E1 dε = E1 d +
ε
ε
!
= E0 (d + dε ).
Da ε > 1 folgt E0 < E1 d.h. im Luftspalt wird das Feld grösser und dieser so “geschützte” Kondensator schlägt eher durch, wenn mit E1 die Durchschlagsfeldstärke erreicht wird.
Statt dessen hätte die Dicke des Dielektrikums so gewählt werden müssen, dass d = 0
erreicht wird.
d) Felder einer Kugel oder einer Punktladung im unendlichen Dielektrikum
~
können wie die E-Felder
im Vakuum geschrieben werden, nur indem ε◦ durch εε◦
ersetzt wird.
~ = Q~r ,
D
4πr3
~ =
E
Q~r
εε◦ 4πr3
~ r12 ) · Q = Q1 · Q2 ~r12 .
Für zwei Punktladungen Q1 und Q2 gilt F~ = E(~
3
εε◦ 4πr12
Durch das Dielektrikum wird die Kraft zwischen den zwei Ladungen gegenüber der im
Vakuum um den Faktor 1ε erniedrigt.
2.7.3
Eine atomistische Interpretation der Dielektrizitätskonstanten
†
Eine atomistische Interpretation der Dielektrizitätskonstanten muss im molekularen Bau
der Materie gesucht werden. Es gibt nichtpolare, symmetrische Moleküle (z.B. CO2 ) und
polare, unsymmetrische Moleküle (z.B. H2 O) bezüglich ihrer Ladung:
Nichtpolare Moleküle
x
AA CH4
¢
¢i
A
¢ Cx
³H
x³
HAx
¢³
Die Schwerpunkte der positiven und negativen Ladungen
fallen zusammen, die symmetrischen Moleküle haben kein
CO2
~
permanentes Dipolmoment. Ein äusseres E-Feld
verschiebt
j
j
j
die
Ladungen
und
induziert
damit
einen
elektrischen
Dipol
O
C
O
~ F am Molekül p~e = pm · E
~ F , wobei pm die molekulare elektrische
proportional zum Feld E
~ F ist nicht elementar berechenbar,
Polarisierbarkeit, eine Konstante des Moleküls, ist. E
es hängt vom Einfluss der Nachbarmoleküle ab und kann durch das innere Feld und die
~F = E
~ innen + 1 P~ für isotrope Substanzen. Für n
Polarisation ausgedrückt werden E
3ε◦
Moleküle ist dann
~ innen + 1 P~ ) ⇒ P~ = n · pm E
~ innen mit D
~ = εε◦ E
~ = ε◦ E
~ + P~
n · p~e = P~ = n · pm (E
m
3ε◦
1 − n·p
3ε◦
~
und P~ = ε◦ (ε − 1)E
erhält man
ε−1
n · pm
=
3ε◦
ε+2
Clausius-Masotti
Formel
Damit besteht ein Zusammenhang zwischen der makroskopischen Dielektrizitätskonstanten ε und der mikroskopischen, molekularen elektrischen Polarisierbarkeit pm . Die induzierten Dipole tragen mit dem Wert ε zum Wert εε◦ , der absoluten Dielektrizitätskonstanten des Materials, bei. ε ist nicht von der Temperatur abhängig.
26
Polare Moleküle
H2 O
HCl
Die Schwerpunkte der positiven und negativen Ladungen fallen nicht zusammen. Polare, nichtsymmetrische MoX Hj
» Oj
j
Hj
Hj
Cl
leküle haben daher ein permanentes Dipolmoment p~ = q~ℓ
P
mit ~ℓ dem Abstand der beiden Schwerpunkte.
As·m
HCl
V/m
Die zunächst ungeordneten Dipole erhalten im
.10-3 9
~
E-Feld
eine Orientierung in der Feldrichtung und erzeugen
damit eine Polarisierung des Dielektrikums. Dieser Polari1
sierung wirkt die Wärmebewegung mit zunehmender Temperatur entgegen und ε ist von der Temperatur abhängig.
CH4
Zusätzlich muss noch der Anteil der induzierten Dipole, wie
1/T
1
3
5 .10-3 °C-1
bei den nichtpolaren Molekülen, berücksichtigt werden.
Eine genaue Berechnung der Temperaturabhängigkeit ist elementar nicht möglich. Die
Frequenzabhängigkeit ε = ε(ω) ist für die Optik wichtig.
2.8
Die Energie des elektrostatischen Feldes
Wird ein Kondensator aufgeladen, dann muss Arbeit geleistet werden. Wird der
einen Platte die Ladung dQ entnommen und der anderen zugeführt, so ist die vom
Integrationsweg unabhängige, zu leistende
V1
1
Z1
¢̧
s
~
E ¢ dQ
~ · d~r = dQ(V1 − V2 ) = dQ · V
Arbeit
dW = −dQ · E
(26)
? ¢
2
2
V2
Die Potentialdifferenz steigt dabei um dV = dQ/C und es gilt für die Arbeit
dW = CV dV . Die totale Arbeit, die erforderlich ist, um einen Kondensator von V = 0
auf die Spannung V aufzuladen, ist demnach mit V = Q/C
W =
ZV
0
dW =
ZV
0
1 Q2
1
1
= V Q.
CV dV = CV 2 =
2
2C
2
(27)
Da beim Aufladen des Kondensators ein elektrisches Feld aufgebaut wird, stellt W offenbar
die Energie dar, die aufgebracht werden muss, um dieses Feld zu erzeugen. Ein elektrisches
Feld besitzt demnach potentielle Energie, die Feldenergie We , wobei hier gilt
1
We = C · V 2
2
Für den einfachen Fall eines ebenen Feldes in einem Plattenkodensator mit einem
Dielektrikum ist C = εε◦ A/d und V = E · d und damit die Feldenergie
1
1
We = · εε◦ A · d · E 2 = εε◦ · E 2 · τ
2
2
A
(τ = A · d Kondensatorvolumen )
~
E
d
??????6
?
~ = εε◦ E
~
Die Energiedichte w ist die Feldenergie pro Volumenenheit, also mit D
auch für ein beliebiges Feld
1
1
1~~
We
= εε◦ E 2 = ED = w = E
D.
τ
2
2
2
27
(28)
~ und D
~ nicht parallel zueinander stehen, ε ist
In anisotropen Dielektrika müssen E
dann ein Tensor. Die totale Feldenergie eines elektrostatischen Feldes ist demnach
Z
We =
1Z ~~
w dτ =
E D dτ
2
(29)
Beispiel 1: In Luft bei Atmosphärendruck können Felder ohne Durchschlag bis zu
E ≈ 3 · 106 V/m erzeugt werden. Die Energiedichte ist dann
2
V2 = 40 J . Damit lassen sich in Luft
w = 21 εε◦ E 2 = 12 8.854 · 10−12 Cb 2 · 9 · 1012 m
2
m3
Nm
keine grossen Energiebeträge speichern, erst das grosse Volumen eines Gewitters ergibt
insgesamt sehr grosse Energiebeträge.
Beispiel 2: In Molekülen27 herrscht ein elektrisches Feld von E ≈ 5 · 1010 V/m und damit
eine Energiedichte von ca 1010 J/m3 . Diese Energie kann teilweise durch eine Umgruppierung von Atomen in einem Molekül bei einer chemischen Reaktion und damit einer
Änderung der elektrischen Felder freigesetzt werden. So werden z.B. bei der Bildung von
1 cm3 flüssigem Wasser aus Knallgas 1.6 · 1010 J/m3 frei.
2.8.1
Berechnung der Kräfte auf Leiter und Dielektrika aus der Feldenergie
Ist die Feldenergie eines Systems von geladenen Leitern und Dielektrika bekannt, dann
können daraus die Kräfte berechnet werden. Dazu denke man sich eine kleine virtuelle
Verschiebung des Körpers um die Strecke d~r, dann ist die vom Feld geleistete mechanische
Arbeit dWm = F~ d~r. Es müssen jetzt zwei Fälle unterschieden werden:
a) Das Systen ist abgeschlossen und alle Ladungen sind konstant, d.h. dQi = 0, damit
ist auch die Gesamtenergie konstant und die Arbeit muss vom Feld aufgebracht werden28 :
dWe + dWm = 0 d.h. dWm = F~ d~r = −dWe
Ã
∂We
oder Fx = −
∂x
und analog für Fy , Fz . Als Vektorgleichung
!
Qi =konst.
F~ = −(∇We )Qi =konst.
(30)
b) Das System ist an eine oder mehrere Batterien angeschlossen, welche die Potentiale
Vi konstant halten, indem sie Ladungen dQi und damit die Energie dWB nachliefern.
Es gilt dann (siehe Gl. (26))
dWe + dWm = dWB
und dWB =
X
Vi dQi
i
für die von der Batterie gelieferte Energie. Mit Gl. (27) We = 21 V ·Q gilt für die Feldenergie
dWe =
1X
1
Vi dQi = dWB
2
2
und damit
27
Ã
∂We
Fx = +
∂x
!
⇒ dWm = dWB − dWe = +dWe = F~ · d~r
analog für die Fy , Fz Komponenten.
Vi =konst.
Mit dem Bohrschen Radius eines Atoms von 0.5·10−8 cm =0.5Å kann das Feld des Coulomb-
potentials abgeschätzt werden zu
E=
1.6 · 10−19
1
V
e 1
=
·
= 5.7 · 1011 .
2
−12
−10
2
4πε◦ r
4π · 8.85 · 10
(0.5 · 10 )
m
Felder der chemisch relevanten äusseren Valenzelektronen sind um eine Grössenordnung kleiner.
28
~
Vergleiche die analoge Überlegung in der Mechanik mit Fx = − ∂V
∂x aus F = −∇Vmech. Pot.
28
F~ = (∇We )Vi =konst.
Als Vektorgleichung gilt damit
(31)
Wenn für einen speziellen Fall die Kräfte aus einer gedachten virtuellen Verschiebung
berechnet werden, dann müssen beide Methoden a) und b) dasselbe Resultat ergeben.
2.8.2
Beispiele zur Energie des elektrostatischen Feldes
1. Die Thomsonsche Waage
Diese von Lord Kelvin vorgeschlagene Anordnung dient zur direkten Messung des
Potentiales in SI-Einheiten. Gesucht ist die Kraft auf eine Platte eines ebenen geladenen Plattenkondensators. Die untere Platte ist Teil einer Waage und die von der oberen
ausgeübte Kraft wird durch Gewichte kompensiert. Die Kraft kann mit beiden, obigen
Methoden berechnet werden.
6
a) Q =konst. Mit Gl. (27) We = 21 Q2 /C und C = ε◦ A/x ist
x
6
+Q
Fx
?
−Q
V
∂
∂We
=
−Fx =
∂x
∂x
?
6
Fx
?
V
C=
Q2 x
2ε◦ A
!
Ã
=
∂We
Fx = +
∂x
b) V =konst
x
Ã
ε◦ A
⇒
x
Ã
∂We
∂x
!
=
V
!
Q2
2ε◦ A
,
V
⇒ Fx = −
We =
Q2
ε◦ AV 2
=−
2ε◦ A
2x2
ε◦ AV 2
CV 2
=
2
2x
mit
ε◦ AV 2 ∂ x1
ε◦ AV 2
Q2
=−
=
−
= Fx .
2 ∂x
2x2
2ε◦ A
Mit dieser Methode kann absolut die Spannung gemessen werden.
2. Steighöhe eines flüssigen Dielektrikums im Plattenkondensator
Wird zwischen die Platten eines Kondensators eine Flüssigkeit gebracht, so wird diese
polarisiert und durch die Kraft des inhomogenen Randfeldes um x angehoben29 . Das
homogene Feld im Innern des Kondensators übt keine Kraft auf einen Dipol aus. Im
Gleichgewicht ist die elektrische Kraft Fx auf das Dielektrikum gleich dem Gewicht
G = ρgxbd der angehobenen Flüssigkeit. Die Feldenergie im
x
Kondensator ist, wenn er in die zwei Bereiche mit und ohne
d
Dielektrikum eingeteilt wird:
a
dx
x
We =
b
CV 2
Q2
ε◦ b
=
, mit C =
(xε + (a − x)) und V = E · d
2
2C
d
a) alles in Q ausdrücken
Ã
∂We
Fx = −
∂x
!
Q
Q2 d 1
=−
2 dx C
µ
¶
=+
Q2 ε◦ b
V 2 ε◦ b(ε − 1)
(ε
−
1)
=
+
2 C 2d
2d
b) alles in V ausdrücken
Ã
∂We
Fx = +
∂x
29
!
V
=
V 2 dC
V 2 ε◦ b
=
(ε − 1) = G = ρ g x b d. Daraus folgt
2 dx
2 d | {z }
χe
Da im homogenen Feld keine Kraft auf den Dipol ausgeübt wird, kann nur das inhomogene Randfeld
als Angriffspunkt der Kraft interpretiert werden; die Energiebetrachtung macht darüber keine Aussage.
29
die angehobene Höhe x =
ε◦ E 2 (ε − 1)
V 2 ε◦ b(ε − 1)
=
2dρgbd
2ρg
⇒
χe =
2xρgd2
ε◦ V 2
Mit dieser Methode kann ε bzw. die Suszeptibilität χe gemessen werden.
3. Die potentielle Energie eines elektrische Dipols im Feld
Die potentielle Energie eines Dipols Wd mit dem Dipolmoment ~ℓ im homogenen
~ ist gleich der Arbeit, die geleistet werden muss, um den Dipol in
elektrischen Feld E
eine bestimmte Lage zu drehen. Für eine Drehung um den Winkel α gegenüber der
Ausgangslage α = 0 wird die Arbeit Wd gegenüber den abstossen→
→
-q
E
E
ℓ
den
elektrischen Kräften geleistet:
a
ϕ
a
α=ϕ−π/ 2
+q
ℓ
~
Wd = 2 q E a = 2 q E sin α = −q ℓ E cos ϕ = −~p · E
2
Die Energie eines elektrischen Dipols ist
~
und mit Gl. (30) die Kraft in einem inhomogenen E-Feld
30
~
Wd = −~p · E
~
F~ = −∇Wd = ∇~p · E.
(32)
3
Stationäre elektrische Ströme
3.1
Begriffe zur Beschreibung elektrischer Ströme
Verbinden wir zwei Leiter 1 und 2 mit verschiedenen Potentialen V1 und V2 mit einem
dritten Leiter, so fliesst Ladung, d.h. ein elektrischer Strom ([Cb/s]=[A]) von 1 nach
2 (oder umgekehrt), bis nach einiger Zeit das Potential überall den gleichen Wert hat.
Strom ist bewegte Ladung. Während Ladung fliesst, ist dagegen das Potential von
~ setzt Ladungen mit der Kraft F~ = q E
~ in
Ort zu Ort verschieden. Die Feldstärke E
Bewegung. Die Geschwindigkeit des Ladungsausgleiches hängt von der Leitfähigkeit der
Leiter ab.
3.1.1
Die Spannung in einem Leiter
Fliesst in einem Leiter unter der Wirkung eines elektrischen Feldes ein Strom, so ist die
Spannung V zwischen den zwei Punkten 1 und 2 (auch Spannungsabfall genannt) definiert
als Potentialdifferenz V1 − V2 = V längs des Leiters
V
V
1
2
→
V = V1 − V2 =
E
1
Z
1
2
~ d~r.
E
2
Die Einheit der Spannung V ist 1Volt [V]. Fliesst ein Strom
~ muss diesem auch ein Potential V zugeordnet sein.
unter der Wirkung eines Feldes E,
3.1.2
Die elektrische Stromdichte in einem Leiter
Zur quantitativen Charakterisierung elektrischer Ströme müssen wohldefinierte Strom~ =
grössen eingeführt werden. Dazu betrachtet man ein gerichtetes Flächenelement dA
~n · dA im Innern des stromdurchflossenen Leiters. Die Ladung dq, die im Zeitintervall
t bis t + dt hindurchfliesst, hängt vom Ort und der Stellung des Flächenjn 6 ¢̧ ~j
¢
~ ab. Man setzt
elementes dA
dq = ~j · ~n dA dt = jn dA dt.
¢
Der durch diese Beziehung definierte Stromdichtevektor ~j oder die
~n 6¢¢
Stromdichte, zeigt dabei die Richtung an, in der sich am betreffenden
¡ ¢ ¡dA
¡
¡
Ort die positiven Ladungen bewegen. Der Betrag j ist gleich der Ladung,
¢
die pro Sekunde durch die Flächeneinheit senkrecht zu ~j hindurchströmt.
¢
Die Stromverteilung innerhalb des Leiters wird somit durch das Vektorfeld ~j = ~j(~r, t)
beschrieben. Ist ~j unabhängig von der Zeit, also ~j = ~j(~r), dann nennt man den Strom
stationär. Die Einheit von ~j ist [1 Cb/m2 s]=[Ampère/m2 ]=[A/m2 ].
Da keine Ladung verloren gehen kann30 , gilt für die Stromdichte die Kontinuitätsgleichung und damit die Ladungserhaltung:
[jx (x+dx)−jx (x)]dy dz+[jy (y+dy)−jy (y)]dx dz+[jz (z+dz)−jz (z)]dx dy = −
∂ρ
dx dy dz.
∂t
Dabei ist ρ die Ladungsdichte an der Stelle ~r(x, y, z).
30
In der Quantenelektrodynamik folgt aus der Symmetrieforderung der Eichinvarianz
die LadungsP
erhaltung. In jedem abgeschlossenen System ist die Ladung streng erhalten:
qi =konst. Ladung kann
nicht vernichtet oder erzeugt werden; es können nur Paare von Teilchen mit entgegengesetzten Ladungen,
die sich zu null aufheben, erzeugt oder vernichtet werden. Z.B. Paarerzeugung γ + Kern → e+ + e− + Kern
oder Paarvernichtung e+ + e− → γ + γ.
31
z
6
jz (z + dz)
6
³ j (y + dy)
³³
y
dx
1
³
³
1
dz
jx (x + dx)
jx (x) ³³
jy (y)
´
´
r
´
»» »
(x, y, z)
1y
³
³³
Der netto ausfliessende Strom (Ladung/Zeit) ist
gleich der Abnahme der Ladung pro Zeit. Daraus
erhält man durch Division mit dxdydz als Differentialgleichung die Kontinuitätsgleichung
∂jx ∂jy ∂jz
∂ρ
+
+
=−
∂x
∂y
∂z
∂t
dy
jz (z)
x
-
oder
∂ρ
div~j = ∇ · ~j = −
∂t
(33)
∂
=0
gilt
∇ · ~j = 0.
∂t
Vergleiche hierzu die entsprechende Kontinuitätsgleichung Phys AI Gl. (150) ∇ · ~v = 0
~ = ρ/ε◦ für das E-Feld.
~
in der Hydrodynamik und Gl. (9) ∇ · E
Für stationäre Ströme mit
3.1.3
Die elektrische Stromstärke
Oft interessiert nicht die Stromverteilung, die durch ~j charakterisiert wird, sondern nur
der totale Strom durch einen Leiterquerschnitt A. Ist dA ein Flächenelement von A,
~j · ~n dA dt = jn dA dt bzw. dq = jn dA.
dann
ist
dq
=
~
6
¢̧
j
jn
dt
¢
¢
Die pro Zeiteinheit durch A längs eines Leiters strömende Ladung
~n 6¢
Z
¡
¡ ¢
dq
¡ ¢ ¡dA
¡
=
I
=
jn dA integriert über die Fläche A.
ist
somit
¡
¡
dt
¡
¢
A
¡ A ¢
¢
I nennt man die elektrische Stromstärke.
Sie ist im Gegensatz zu ~j eine skalare Grösse und ihre Einheit ist [Ampère]= [Cb/s].
Eigenschaften elektrischer Ströme, die im folgenden behandelt werden, sind:
a) Wärmeerzeugung, sie hängt von der Art des Leiters ab,
b) Materialtransport, wie Ionentransport. Ladung ist immer mit Masse verknüpft.
c) Ströme zeigen magnetische Wirkungen.
3.1.4
Der elektrische Widerstand eines Leiters
Ist die Spannung an einem Leiter vorgegeben, dann ist die Stromstärke I abhängig von
der geometrischen Form des Leiters und dessen Leitfähigkeit. Man definiert
. V
R=
I
den elektrischen Widerstand des individuellen Leiters.
(34)
R ist im allgemeinen keine Konstante, sondern eine Funktion von I, sowie anderer physikalischer Grössen des Leitermaterials (z.B Temperatur, Magnetfeld, Lichteinstrahlung,
Druck). In denjenigen Fällen, in denen R konstant ist, nennt man dieV 6
R =konst.
sen
einen Ohmschen Widerstand und drückt ihn durch das Symbol
©
©©
R
aus.
©©
-I
©
Die Einheit des Widerstandes ist 1 Ohm=1Ω = 1 V
A.
32
3.1.5
Elektromotorische Kraft und innerer Widerstand
Um in einem Leiter einen stationären Strom aufrecht zu erhalten, muss in diesem RLeiter
~ r.
dauernd ein elektrisches Feld existieren. Am Leiter liegt dann eine Spannung V = Ed~
Da dauernd Wärme erzeugt wird, muss das Feld die dafür nötige Arbeit leisten und der
Leiter muss an eine Energiequelle eine Spannungsquelle angeschlossen sein, die die entsprechende Energie liefert. Spannungsquelle und Leiter bilden zusammen einen Sromkreis. HEin elektrostatisches Feld kann keine Energie leisten, da für eine geschlossene
~ r = 0 gilt und es damit nicht möglich ist aus einem elektrostatischen Feld
Kurve Ed~
längs eines geschlossenen Weges (Stromkreis) Arbeit zu gewinnen.
LeiDie Arbeitsfähigkeit einer
Spannungsquelle beruht auf nichtSpannungsH
ter
quelle
~
konservativen Prozessen [ Ed~r 6= 0], die chemischer, thermischer, mechanischer oder elektrischer Natur [Kap. 5.1, Gl. (59)] sein können.
Beispiele:
Primärelement: Chemische Energie → Elektrische Energie
Akkumulator: Elektrische Energie → Chemische Energie → Elektrische Energie
Generator: Mechanische Energie → elektrische Energie
Photozelle: Licht → Elektrische Energie
Thermosäule: Wärme → Elektrische Energie
Kernkraftwerk: Kernenergie → Wärme → Elektrische Energie
Zur quantitativen Charakterisierung einer Spannungsquelle werden die folgenden
Grössen definiert:
a) Die elektromotorische Kraft Vm ist die Quellenspannung V◦ an den beiden
Klemmen 1 und 2 der Spannungsquelle (beachte: es gibt auch −Vm = V◦ ) , sofern sie
unbelastet ist, also
Vm = V◦ =
Z2
~ r)d~r.
E(~
~
Dabei ist E
Spannungsquelle
r
1
²¯
¢A V◦
±°
r2
das durch die Quelle im Äusseren erzeugte elektrische Feld.
b) Der innere Widerstand Ri : Wird eine Spannungsquelle belastet, d.h. liefert sie
einen Strom, der durch einen äusseren Widerstand R fliesst, so wird die Klemmenspannung
V kleiner als V◦ = Vm . Der Strom fliesst auch im Innern der Quelle
r
und es entsteht ein Spannungsabfall Ri I, so dass gilt
?
I
²¯
Ri↑I ±°
¢A
R
V = Vm − Ri I.
V
1
r
Ri = Ri (I · · ·) ist der innere Widerstand der Spannungsquelle
Bei einem äusseren Kurzschluss wird der Strom durch Ri begrenzt. Sind Ri und Vm
konstant, dann ist der Zusammenhang zwischen V und I linear. Für eine Spannungsquelle
Ri
wird das Symbol Vm +
benützt. Die Vorzeichen deuten dabei an, dass bei einer
−
äusseren Belastung ein positiver Strom von + nach − fliesst.
3.1.6
Die Kirchhoff ’schen Regeln
Spannungsquellen und Widerstände können zu Stromkreisen zusammengeschaltet werden. Bei vorgegebenen Werten der einzelnen Schaltelemente müssen dann Ströme und
Spannungen berechnet werden. Dabei gelten die folgenden Kirchhoff’schen Regeln:
33
a) für einen Knoten in dem n Leiter zusammentreffen, ist die Summe der zugeführten
Ströme gleich der Summe der weggeführten:
n
X
I1@@
R ?
@
@s - Ik
©©B
¼
In ©
B
zufliessende Ströme werden positiv abfliessende negativ gerechnet.
NB
b) Für eine Masche, einen einfachen geschlossenen Stromkreis, mit m Spannungsquellen und n Belastungswiderständen ist die Summe aller elektromotorischen Kräfte Vm
mit den entsprechenden Vorzeichen gleich der Summe aller Spannungsabfälle:
Ik = 0,
k=1
m
X
Vmj =
n
X
Vi
i=1
j=1
V1
Vi
V2
Vmj
Die Spannungsabfälle über die inneren Widerstände der
Spannungsquellen müssen mitberücksichtigt werden.
Mit den Kirchhoff’schen Regeln werden als Beispiel die Ersatzwiderstände der Parallelschaltung und der Serienschaltung angegeben:
Parallelschaltung von Widerständen (Ströme addieren)
n
X
V
V
6 I
6I
Es ist
Ii , mit Ii =
=I=
R
Ri
I
I
I
i=1
?1 ?1
?n
⇒
V
V R1 R2 · · · · Rn
n
n
R
X
X
1
V
1
1
somit
=
=
I=V
R
R i=1 Ri
i=1 Ri
?
Vm1
?
Serienschaltung von Widerständen (Spannungsabfälle addieren)
I
6
V
?
3.2
R1
R2
Rn
I
6
⇒V
V = IR = IR1 + IR2 + · · · = I
R
⇒
?
R=
n
X
n
X
Ri
i=1
Ri
i=1
Mechanismus und Charakteristik der elektrischen Leitung
Bewegung von elektrischen Ladungsträgern sind elektrische Ströme. Damit Materialien
Leiter sind, müssen sie bewegliche elektrische Ladungsträger enthalten und ein angelegtes
elektrisches Feld erzeugt dann den Strom.
Dass allein die Bewegung der Ladungsträger entscheidend ist, zeigen folgende Versuche:
Werden die Platten eines Kondensators mit einer konstanten
m
µ
¡
I ¡
Spannungsquelle verbunden, so wird in diesem Stromkreis ein
Strom
gemessen, wenn als Ladungsträger eine geladene Kugel
Q
zwischen den Platten bewegt wird; wenn eine Flamme mit Ionen
z
im Kondensatorraum brennt; wenn eine ionisierende, radioaktive
¾
Quelle in der Nähe der Platten aufgestellt wird.
Es fliesst ein Strom, wenn im Kondensator bewegliche Ladung vorhanden ist. Im folgenden
werden Leitungsmechanismen in verschiedenen Materialien und Anordnungen untersucht.
34
3.2.1
Leitung in Metallen
†
In den Metallen bilden positive Metallionen, die ein oder mehrere Elektronen als Leitungselektronen abgegeben haben, einen festen Gitter⊕ ⊕ ⊕ ⊕
verband, in dem sich die Leitungselektronen relativ leicht bewegen
⊕ ⊕ ⊕ ⊕
können. Das Gitter ist nicht starr, sondern die Ionen schwingen ther⊖
misch um ihre Gleichgewichtslage.
⊕ ⊕ ⊕ ⊕
Vernachlässigt man die Wechselwirkung der Leitungselektronen untereinander und mit
den Ionen, dann können sie wie ein ideales Gas im Modell des freien Elektronengases
behandelt werden. Die Leitungselektronen bewegen sich ungeordnet mit Zusammenstössen
im Leiter mit einer
q mittleren thermischen Geschwindigkeit (bei Zimmertemperatur) von
vtherm = ℓ/τ = 3kT /m ≈ 105 m/s. Legt man ein äusseres elektrisches Feld an, dann
~
driften sie mit einer mittleren Driftgeschwindigkeit vD in der Richtung des Feldes −E.
⊕ ⊕ ⊕ ⊕
⊖
eE
τ = v2 − v1 = vD , (35)
m
~
mit τ ≈ 10−12 s der Zeit zwischen zwei Zusammenstössen. ~vD ist proportional zu E.
= eE und damit
Es gilt nach dem Aktionsprinzip m dv
dt
Mit dem Hall-Effekt (Kap. 4.2.6) kann die Beweglichkeit b = vD /E = eτ /m (36)
√
3kT m
b
gemessen werden. Man erhält für die mittlere freie Weglänge ℓ =
e
Für Silber bei 20◦ ist b = 6.4·10−3 m2 /Vs, ℓ = 8.3·10−9 m. Bei einem Feld von E = 1 V/m
erhalten also die Elektronen in Feldrichtung die kleine Geschwindigkeit vD = 6.4 mm/s
und sie legen zwischen den Stössen eine Strecke von rund 30 Atomabständen zurück mit
einer mittleren Flugzeit von τ = 10−13 s.
In diesem Elektronengas Modell kann man einen Stromdichtevektor ~j = n e ~vD angeben, mit n der Zahl der Leitungselektronen pro Volumeneinheit. Mit Gl. (35) gilt
2
~ = σE
~
~j = n e τ E
m
das Ohmsche Gesetz.
(37)
σ [Ω m]−1 ist die elektrische Leitfähigkeit , 1/σ = ρ [Ω m] der spezifische elektrische
Widerstand . Mit den Gleichungen (36) und (37) ergibt sich die wichtige Beziehung
σ=
Spezifische Widerstände bei 20◦
Metall
ρ [Ωm]
Ag
1.5 · 10−8
Cu
1.6 · 10−8
Al
2.4 · 10−8
Fe
10 · 10−8
Konstantan 50 · 10−8
n e2 τ
= neb
m
(38)
~
σ und ρ sind Materialkonstanten, die unabhängig von E
und den Abmessungen des Leiters sind, jedoch über die
Flugzeit τ und n von der Temperatur T abhängen. In sehr
reinen Metallen mit wenig Fremdatomen gilt
1
ρ = ∝ T für hohe Temperaturen z.B. 300 K und
σ
1
ρ = ∝ T 5 für niedrige Temperaturen (Fig. S 36).
σ
~ kann mit der phänoDas Ohmsche Gesetz Gl. (37) in der mikroskopischen Form ~j = σ E
menologischen Schreibweise Gl. (34) V = I · R verknüpft werden.
Für ein homogenes, gerades Leiterstück mit dem konstan¾
V
?
ten Querschnitt A, der Länge ℓ und der anliegenden Span→ E → j
A
nung V ist die Stromdichte j = σE = σV /ℓ und die
6¾
ℓ
35
Stromstärke I = A j = V σ A/ℓ = V /R also
R=ρ
ℓ
1 ℓ
=
A
σA
Der Zusammenhang R = V /I = konst. gilt nur für eine konstante Temperatur. Der allgemeinen Zusammenhang I = I(V ) wird mit der Strom-Spannungscharakteristik
dargestellt.
Je nach den Wärmeableitungen ergeben sich für verschiedenen
I
Glühlampen unterschiedliche Kurven. In der Gasatmosphäre der
"
Gluhlampe
geschlossenen Glühbirne kann die Joulsche Wärme nur schlecht
abgeleitet werden, so dass die Temperatur und damit der Widerstand des Wolframfadens ansteigen, die I − V -Charakteristik ist
V
gekrümmt.
In reinen Metallen wächst der Widerstand linear mit der Temperatur, wenn diese genügend hoch ist. Mit R◦ , dem Widerstand
I Metall
des Metalles bei 0◦ C, gilt Rt = R◦ (1 + β t),
6
T
2
β liegt zwischen 1/200 und 1/300 in der Grössenordnung der
©©
©
T
© ³³ 1
Ausdehnungskoeffizienten
α = 1/273 der idealen Gase (Elek©³ ³
©
³
T
<
T
©
³
2
1
tronengas). Bei sehr niedrigen Temperaturen T → 0 wird bei
³³
©
³©
-V
Metallen der Widerstand nicht linear Null, sondern er verläuft
mit ∝ T 5 gegen einen Restwiderstand (Nullpunktsenergie).
ρ
Es gibt auch Metalle (Legierungen und Verbindungen z.B.
Normalleiter
Nb3 Sn), deren sezifischer Widerstand ρ unterhalb einer SprungMetall
temperatur Tc auf exakt Null sinkt. Diese Supraleitung wurde
Supraleiter
1911 von Kamerlingh-Onnes entdeckt. In supraleitenden MetalT
len können Ströme ohne Ohmsche Verluste, d.h. ohne EnergieTC
zufuhr beliebig lange fliessen31 .
Bei Isolatoren erhöht sich die Leitfähigkeit mit steigender Temperatur. Z.B. ein normalerweise isolierender Kochsalzkristall wird bei erhöhter Temperatur leitend, es können
Elektronen eingespritzt werden, welche sich durch den Kristall bewegen.
3.2.2
Halbleiter
†
Halbleiter sind Materialien, deren Leitfähigkeit von der guter Metalle bis zu jener guter Isolatoren reichen kann. Im Gegensatz zu Metallen kann in Halbleitern die Zahl der
Ladungsträger stark variiert werden durch: Temperaturänderungen, Einbau von Fremdatomen (Dotieren), stöchiometrische Abweichungen, elektrische und magnetische Felder.
Meist nimmt die Leitfähigkeit mit steigender Temperatur zu, da die Zahl der Ladungsträger wächst [vgl. Gl. (37)].
31
1957 entwickelten John Bardeen, Leon Cooper und Bob Schrieffer die BCS-Theorie der Supraleitung.
Sie kann durch die paarweise Wechselwirkung von Elektronen, die dabei Cooper-Paare (Spin=0 Bosonen,
für die das Pauli-Prinzip nicht gilt) bilden, erklärt werden. Cooper-Paare können sich ungehindert durch
das Metall bewegen. “Hochtemperatursupraleitung” wurde 1986 von K.A. Müller und J.G. Bednorz in
Zürich bei IBM an Perovskiten entdeckt und mit dem Nobelpreis geehrt. Die höchste bisher bekannte
Sprungtemperatur liegt bei 133 K. Der genaue Mechanismus im Hochtemperatursupraleiter ist bisher
noch nicht bekannt.
36
Das elektrische Verhalten von Halbleitern wird durch das
Bändermodell (Festkörperphysik I, s.u.) beschrieben. Es
Spezifischer Widerstand
gibt Halbleiter mit Eigenleitung, in denen durch Wärmeρ [Ωm] von Halbleitern
bewegung oder geeignete Bestrahlung ein Bruchteil der
Leiter
10−8 − 10−6
Elektronen beweglich wird (Übergang vom Valenzband ins
Halbleiter 10−4 − 107
Leitungsband). Dazu ist eine minimale Energie notwendig,
Isolatoren
1012
die bei tiefen Temperaturen nicht zur Verfügung steht, der
Halbleiter wird im Gegensatz zum Metall ein Isolator.
Durch kontrollierten Einbau von Fremdatomen entsteht die
Si
f
f
f
f
Störstellenleitung. Im vierwertigen Silizium oder Germanium
kann fünfwertiges Arsen, Phosphor oder Antimon eingebaut werf
f
f
f
den (dotieren). Dieser Einbau stört möglichst wenig, wenn das
As-Atom auch vier Bindungen zu seinen nächsten Si-Nachbarn
+
As f
f
f
f
v
eingeht. Dabei gibt es sein Valenzelektron ab, das zum Leitungs⊖ Leitungselektron
elektron wird. Solche Fremdatome heissen deshalb Donatoren
f
f
f
f
und das Material ist ein n-Halbleiter mit negativen Ladungsträgern.
Si
Einen
p-Halbleiter mit positiven Ladungsträgern erhält man
f
f
f
f
mit einer Dotierung von Bor, Gallium, Aluminium oder Indium. Um 4 Bindungen einzugehen muss ein B-Atom ein Elektron
f
f
f
f
aufnehmen (das Fremdatom ist ein Akzeptor), das einer Si-Si−
B
Bindung entnommen wird, in der ein Loch (Defektelektron)
v
f
f
f
f
entsteht, das wie ein positives Teilchen wirkt. Durch gezieltes
⊕ Defektelektron
Dotieren können so p- und n-Halbleiter hergestellt werden, die
f
f
f
f
für die Technik von grosser Bedeutung sind.
p- und n-Halbleiter haben einen Überschuss des entsprechenden Ladungsträgers, zur
Leitfähigkeit σ tragen daher beide bei und mit Gl. (38) gilt dann
σ = σ+ + σ− = e (n+ b+ + n− b− )
n und b sind die Konzentrationen und Beweglichkeite der jeweiligen Ladungsträgersor~
te. Da die positiven Defektelektronen oder “Löcher” in Richtung des E-Feldes
wandern,
tragen sie im gleichen Sinne zum Gesamtstrom bei wie die Elektronen.
Das Bändermodell der Festkörper
In einem einzelnen Wasserstoffatom (Proton+Elektron) ist das Elekton im niedrigsten
Zustand bei EB (1s) =-13.6 eV und im nächst höheren Zustand bei EB (2s, 2p) =-3.4 eV
gebunden32 . Beide Zustände liegen also weit auseinander (Fig. S.37).
eV(r)
r
Nähern sich zwei Atome, so überlappen sich die Orbitale (Potentiale) etwas und analog zum gekoppelten Pendel (Kap. ?? Fig. S.??)
2s, 2p
-3.4 eV
entsteht aus den vorher energetisch idenE(r)
entartet
tischen, entarteten Zuständen durch die
2s
Kopplung ein gemeinsames System mit
∆Ε ∼10 eV
1s
jeweils zwei dicht beieinanderliegenden
-13.6 eV
1s
Elektronenzuständen sowohl für den ber
Termschema
setzten Grundzustand als auch für den
Zustande
"
im H2 - Molekul
"
des H-Atoms
nicht besetzten angeregten Zustand.
32
Nach quantenmechanischer Rechnung mit der Schrödinger-Gleichung ist EB =
37
2
mc2 (Zα)
2
n2
Bei noch geringerem Abstand wird die Entartung immer weiter aufgehoben und die zunächst um ca 10 eV auseinanderliegenden 1s und 2s Zustände nähern sich wie in der
Figur angedeutet einander an.
eV(x)=E pot
Setzt man in einem linearen Modell
Leitungsband N Atome äquidistant aneinander,
∆E
dann erhält man eine Reihe von gleiValenzband chen Potentialen, die schwach gekopx
pelt sind, und damit eine N -fache
33
Aufhebung der Entartung zu einer Bandstruktur in einem Festkörper mit einer angenähert regelmässigen Struktur. Im tieferen Valenzband sind alle Zustände besetzt und
eine Leitung ist wegen des Pauli-Prinzips34 nicht möglich. Das Leitungsband ist leer,
eine Leitung ist nicht möglich, wenn Elektronen aus dem Valenzband die Energiedifferenz
∆E nicht überwinden können, dieser Festkörper ist ein Isolator. Ist die Bandlücke ∆E
klein, dann ist dieser Festkörper bei tiefen Temperaturen ein Isolator. Bei 300 K kann
nur eine Energie von 0.026=1/40 eV aufgenommen werden. Bei sehr hohen Temperaturen
kann durch die thermische Energie die Bandlücke überwunden werden und es entsteht ein
Eigenhalbleiter. Metalle (gute Leiter), Isolatoren und Halbleiter unterscheiden sich damit
durch die Bandlücke ∆E:
Epot
leeres
Leitungsband Metalle: ∆E < 0, beide Bänder
überlappen und beliebig viele
∆E
Elektronen können aus dem Vagefulltes
"
Valenzband
lenzband im Leitungsband zur
Leiter
Isolator
Leitung beitragen.
Isolatoren: ∆E > 3 eV, das Leitungsband ist leer, es ist kaum Eigenleitung möglich
(∆E ≈7 eV für Diamant).
Halbleiter: 0 < ∆E < 3 eV, es ist eine schwache Eigenleitung möglich (1.1 eV für Si).
Verunreinigungen (Dotierung als kontrollierte Verunreileeres
nigung) verschieben das Valenz- und Leitungsband und
Epot
Leitungsband
können damit positive (Donatoren, Löcherleitung) oder ne- - - - - Elektronen
+ +++++ +
Donatoren
gative (Akzeptoren, Elektronenleitung) Ladungsträger, die
- - - - - - Akzeptoren ∆E
+ + + + + + Locher
"
nahe (≈ 0.03 eV) an den Bändern liegen, in das Valenz"
gefulltes
Valenzband
band, bzw. Leitungsband liefern und damit die Eigenschaft
eines Halbleiters als p- oder n-Leiter erzeugen.
Halbleiterbauelemente
Die Halbleiterdiode
Epot
Leitungsband
+
"
Locher
- Elektronen
- + -+ + + +
+ - -+ + - -+ - + + + - + - +
+
+ n-Halbleiter p-Halbleiter
+
+
+
+
+
n-Seite
---Valenzband
ladungsarmer
"
Ubergang
p-Seite
In Halbleiterbauelementen wie Dioden und Transistoren sind n- und p-Leiter miteinander
verbunden, zwischen beiden bildet sich eine Übergangszone aus. Wegen der unterschied33
Vgl. Zustände gekoppelter Schwingungen Kap. ??.
Nach der Quantenmechanik können Teilchen mit einem Spin=1/2 nicht gleichzeitig denselben Zustand einnehmen. In der Potentialkette kann sich daher netto keine Ladung bewegen, da alle Zustände
des Valenzbandes besetzt sind.
34
38
lichen Konzentrationen diffundieren Elektronen in den p-Leiter, Löcher in den n-Leiter
und bilden eine Ladungsdoppelschicht, die ähnlich wie beim Kondensator eine Potentialdifferenz aufbaut.
n-Seite
-
+
p-Seite
-
-
+ - -+
- - +
- + -+
+
- +
- + +
-
n-Seite
+
+
I
V
+ -+
+ - - +
+ +
- ++
+
- + -+
-
+ +
+
-
Durchlaβrichtung
p-Seite
-+ + + +
-- - +
- -+
+
+
- -
V
I
Durchlaβrichtung
Sperrrichtung
V
Sperrichtung
Diese Potentialdifferenz erlaubt nur eine Stromleitung durch diese Diode mit der positiven
Spannung an der p-Seite, wie in der Figur angegeben, mit der entsprechenden Diodencharakteristik. Erhöht man in Sperrichtung bei einer Diode die Spannung, dann setzt bei der
Durchschlagsspannung durch Stossionisation ein Lawinendurchschlag ein (Zener-Diode
zur Spannungsstabilisierung werden nicht mehr hergestellt).
Die Tunneldiode
Tunneleffekt
Leitungsband
leer
"
gefullt
Valenzband
ohne Spannung
kleine Spannung
groβe Spannung
Wird bei einer Diode die Dotierung so gross gewählt, dass die
Donatoren auf der n-Seite so viele Elektronen liefern, dass der
I
untere Teil des Leitungsbandes gefüllt ist, und die Akzeptoren auf der p-Seite soviele Elektronen aufnehmen, dass der
obere Teil des Valenzbandes fast leer ist, dann ist der Übergangsbereich sehr schmal. Elektronen können dann bei einer
Tunneldiode
V
kleinen
Spannung durch den verbotenen Bereich tunneln (Tunneldiode). Die daraus resultierende Diodencharakterestik mit einem steilen Anstieg wird zur Erzeugung schneller Signale
verwendet.
Die Solarzelle
Eine Solarzelle hat eine dünne p-Schicht.
Trifft ein Photon mit einer Energie grösser als die Enereinfallendes Licht
gielücke (1.1 eV in Si) auf die p-Schicht, kann es ein Elektron aus dem Valenzband in das Leitungsband anheben, es
p-Halbleiter
I
kann durch die Übergangsschicht wandern und wird dann
RV
zur n-Schicht beschleunigt. Es fliesst ein Strom, Lichtenern-Halbleiter
gie wurde in elektrische Energie umgewandelt.
Germanium- und Silizium-Detektoren
Durch Dotierung eines hochreinen Ge- oder Si-Einkristalles auf
ionisierendes Teilchen
einer Seite als dünnen n-Leiter und der anderen als dünnen p+
- - +-+ +
Leiter entsteht, entsprechend der Grösse des Einkristalles (bis
γ
C
+
150 ccm), eine dicke, intrinsische Übergangsschicht mit einer hoehen Sperrspannung (500-1000 V), so dass kein Strom fliessen
intr.
R
kann. Der Leckstrom wird durch eine saubere Oberfläche und
n V p
Kühlung auf Flüssig-Stickstoff-Temperatur (-196◦ C) im Vakuum extrem reduziert.
Fliegt ein hochenergetisches, geladenes Teilchen durch den Detektor, dann erzeugt es
39
in der intrinsischen Schicht durch Ionisation negative und positive Ladungsträger, die
von der angelegten Spannung abgesaugt werden. Die Grösse dieses an der Kapazität C
abgegriffenen Stromimpulses ist proportional zu der Zahl der erzeugten Ionenpaare35 und
damit zur abgegebenen Energie. Ein Photon erzeugt durch Photoeffekt ein Elektron in
der intrinsischen Schicht, dessen Energie der Energie des Photons entspricht. Mit diesem
Germanium- oder Silizium-Detektor wird die Energie von geladenen Teilchen oder
von γ-Quanten im Energiebereich 10 keV bis 10 MeV mit hoher Auflösung (≈ 10−4 )
spektroskopiert.
Der Transistor
Kollektor
Kollektor
p-Typ
Basis
n-Typ
Emitter
p-Typ
Kollektor
Basis
Emitter
n-Typ
Basis
p-Typ
Emitter
n-Typ
pnp-Transistor
Kollektor
Basis
Emitter
npn-Transistor
Der Transistor36 besteht aus drei Halbleiterschichten, einem Emitter, einem Kollektor
und einer dünnen Basis zwischen den beiden, die vom anderen Typ sind37 . Die Schaltsymbole für einen pnp- und npn-Transistor sind angegeben. I +i
K
K
Ausgangssignal v aus
IK
Eingangssignal
IB
V EB +
B IE
K + VK
E
v ein
~
RB
E
I B+i B
+ V EB
pnp-Transistorschaltung
K
B
IE
RV
+ V EK
"
pnp-Transistorverstarker
In der Figur ist der E-B-Übergang in Durchlassrichtung und der B-K-Übergang in Sperrichtung geschaltet. Der stark dotierte Emitter emittiert Löcher, die über E-B zur dünnen
Basis und bis in den Kollektor fliessen iK . Die in der Basis rekombinierten Löcher erzeugen
einen Ladungsüberschuss, der den Strom verhindert, was durch die Basisspannung VEB
teilweise verhindert wird. Da IK ≈ IE und IB ≪ IK gilt, erhält man eine
Stromverstärkung
IK = βIB
mit β = 10 . . . 100.
In der einfachen Transistorverstärkerschaltung (Fig. rechts) wird die Eingangsspannung
vein entsprechend der Widerstände RV und RB sowie des Stromverstärkungsfaktors β mit
der Spannungsverstärkung
RV
vaus
=β
vein
RB + RBi
verstärkt38 .
Transistoren haben bis auf einige Spezialfälle die Röhrenverstärker vollständig abgelöst. In der Form der integrierten Schaltung als Chips haben sie drastisch das Anwendungsgebiet in der Elektronik verändert in Richtung eines minimalen Energieaufwandes
35
Der Energieverlust eines geladenen Teilchens pro erzeugtem Ionenpaar beträgt in Ge und Si 2-3 eV,
d.h. viel weniger als 30 eV in Gas. Damit werden in Ge und Si mehr Ionenpaare bei gleicher Energie des
Teilchens erzeugt und die Auflösung eines Halbleiterdetektors ist wegen der höheren Statistik der Zahl
der Ionenpaare viel besser als in einem Gas- oder NaJ-Detektor.
36
1948 von William Shockley, John Bardeen und Walter H. Brattain erfunden.
37
Diese Anordnung ist analog zur Funktion der Kathode, des Gitters und der Anode einer Röhre.
38
ein
ein
, vaus = iK · RV = βiB RV = βRV RBv+R
, RBi : Innenwiderst. Basis-Kollektor.
iB = RBv+R
Bi
Bi
40
(mehr das Problem der Kühlung als des Stromverbrauches), schneller Signalverarbeitung
sowie sehr kleiner, kompakter Bauweise.
3.2.3
Leitung in flüssigen Elektrolyten
Elektrolyte sind Stoffe mit überwiegender Ionenleitung. Feste Elektrolyte sind z.B. AgI,
Alkalisalze, NaCl, KBr,. . . und Glas; flüssige Elektrolyte sind Lösungen von Salzen, Säuren
und Basen. Eine elektrolytische Dissoziation ist der Zerfall eines Moleküls oder Kristalls
in Ionen in der Lösung. Wegen seines grossen Dipolmomentes hat das Wasser eine starke
dissoziierende Wirkung. Je grösser die Dielektrizitätskonstante ε (z.B. ε(H2 O) = 81) ist,
desto geringer sind die elektrostatische Kräfte zwischen den Ionen, desto grösser also die
spaltende Wirkung des Lösungsmittels.
I
~ im Elektrolyten erzeugt,
Wird mit Metallelektroden ein äusseres Feld E
j
µ
¡
¡
dann bewegen sich die positiven Ionen (Kationen) zur Kathode und die
+
−
negativen (Anionen) zur Anode. Die Ladungen der Ionen sind
Pt Pt
q+ = ν+ e und q− = −ν− e, wenn ν+ und ν− die entsprechenden
~
~ wirkt noch eine viskose ReibungsE
Wertigkeiten sind. Neben der Kraft q E
kraft, die proportional zur Geschwindigkeit v der Ionen ist. Im Gleichge~ Die Beweglichkeit b
wicht zwischen beiden Kräften ist ~v = bE.
kann nur bestimmt werden, wenn Annahmen über die Reibungskraft gemacht werden
können. Mit dem Stokes’schen Reibungsgesetz und dem Ionenradius r ist
ν e E = 6πη rv
und somit b =
v
νe
=
.
E
6πηr
Die Stromdichte setzt sich aus dem Ionenstrom der Kationen und der Anionen zusammen
j = j+ + j− = e (n+ ν+ v+ + n− ν− v− ). Da die Lösung neutral ist, gilt n+ ν+ = n− ν−
und damit j = n+ ν+ e (v+ + v− ) und mit v = bE folgt j = n+ ν+ e (b+ + b− )E = σE
Damit ist die Leitfähigkeit eines Elektrolyten bei konstanter Temperatur und nicht zu
hohen Feldstärken
σ=
j
= n+ ν+ e (b+ + b− )
E
Aus der Messung von σ wird nur die Summe der Beweglichkeiten bestimmt, das Verhältnis
von b+ /b− kann jedoch festgelegt werden, wenn die beim Stromdurchgang auftretende
Konzentrationsänderung an den Elektroden gemessen wird. Aus dieser Analyse stammen
die Werte der Tabelle.
Beweglichkeiten [10−8 m2 /Vs]
Wenn man von den hohen Werten für H+ und OH−
b+
b−
absieht, sind die Beweglichkeiten aller Ionen infolge
+
−
H
31.5 F
4.66
ihrer Hydration etwa gleich. Ionen können WasserLi+
3.34 Cl−
6.55
moleküle mit ihrem permanenten elektrischen DipolNa+
4.35 Br−
6.70
moment binden. Mit dem Stokes’sche Reibungsgesetz
+
−
K
6.46 I
6.65
sollte b ∝ νe/r gelten. Kleine Ionen lagern jedoch
Rb+
6.75 SO−−
6.8
Wassermoleküle besser an, so dass ein grösserer Io4
Cs+
6.8 CrO4 7.2
nenradius vorgetäuscht wird. Deshalb nimmt in der
Ca++ 5.1 OH− 15.0
Reihe Li+ -Na+ -Rb+ die Beweglichkeit zu, obwohl die
Radien der freien Ionen zunehmen.
Der Strom in Elektrolyten ist mit einem Materietransport verbunden. n Ionen der Masse µ
transportieren eine Ladung I = n νe und eine Masse n ν an eine Elektrode. In t Sekunden
41
wird also bei konstanter Stromstärke die Masse m = n µ t =
Molmasse M
µ=
N◦
IM
IM
t,
folgt m =
t=
νeN◦
νF
I
µt
νe
abgeschieden. Mit
"
#
Cb
F = N◦ e = 96 484.56
.
Mol
F , die Faradayzahl, ist die Ladung eines Mols einwertiger Ionen, aus einem gemessenen
F kann N◦ bestimmt werden. Elektrolytische Leitung tritt auch bei pseudofesten Körpern
wie Glas ein, erhitztes Glas leitet gut.
3.2.4
Leitung in Gasen
Gase nicht zu hoher Temperatur bestehen aus neutralen Atomen oder Molekülen und sind
damit gute Isolatoren. Werden von aussen Ladungsträger in das Gas gebracht, z.B. durch
Photoemission an Elektroden oder wird das Gas durch Strahlung ionisiert, dann wird
es zum Leiter. Ein angelegtes elektrisches Feld erzeugt einen Strom. Da die Ladungen
¾
d
¶
³ durch äussere Einwirkungen entstanden sind und die Entladung
nicht von selbst einsetzt, spricht man von einer unselbständigen
µ
´ Entladung. Bei genügend hoher Spannung, so dass alle Ionen zu
den Elektroden gelangen, wird der Sättigungsstrom erreicht. Ein
V
I
kleiner Teil der primär gebildeten Ionen können durch Rekomm
µ
¡
¡
bination zu neutralen Molekülen umgewandelt werden.
Bei niedrigem Gasdruck (Luft 0.1 Atm) wird die mittlere freie
Weglänge der Gasatome und Ionen grösser und die Ionen werI
6
den auf so hohe Energien beschleunigt, dass sie beim inelastischen Zusammenstoss neutrale Moleküle ionisieren können und
es entstehen neue Ionen und freie Elektronen, die wiederum ionisieren. Durch diese Stossionisation entsteht eine selbständi-V
©
VZünd.
ge Entladung, bei der der Strom im wesentlichen durch die
Stossionisation aufrecht erhalten wird. Bei niedrigen Drucken spricht man auch von Glimmentladung mit der skizzierten Strom-Spannungs-Charakteristik.
Damit eine selbständige Entladung einsetzen kann, muss eine minimale Zündspannung VZ
vorhanden sein, die vom Gasdruck p und Elektrodenabstand d abhängt. Die von den ionisierenden Elektronen und Ionen zurückgelegte freie Weglänge ℓ̄ ist umgekehrt proportional zu p, d.h.
ℓ̄ ∝ 1/p. Man unterscheidet zwei Grenzfälle:
1. Ist ℓ̄ ≪ d, so müssen die Elektronen zwischen zwei Zusammenstössen mit Gasatomen
genügend Energie erhalten, um ionisieren zu können, d.h. eE ℓ̄ = e VdZ ℓ̄ > e Vion , mit Vion
der nötigen Spannung zur Ionisation. Die vom Elektron gewonnene Energie eE ℓ̄ wird
vollständig ans Gasmolekül abgegeben, also VZ ∝ d/ℓ ∝ pd.
2. Ist ℓ̄ ≫ d und V ≥ Vion , so erhalten die Elektronen genügend Energie eV , um ionisieren zu
können. Die Wahrscheinlichkeit mit einem Gasmolekül zusammenzustossen, ist proportional zur Dichte der Teilchen und dem vorhandenen Volumen zwischen den Elektroden, also
∝ pd. Je kleiner die Wahrscheinlichkeit einer Kollision, um so grösser muss VZ werden:
1
. VZ (pd) erreicht ein Minimum bei (pd)◦ (Gesetz von Paschen).
VZ ∝ pd
42
Vz
V z,min
pd
(pd) o
Wird die Stromdichte einer Entladung so weit erhöht,
dass die Kathode infolge der Wärmeentwicklung Elektronen emittiert, dann geht die Glimmentladung in den
Lichtbogen über. Die Charakteristik des Lichtbogens ist
fallend. Zunehmendes I ergibt höhere Wärmeentwicklung
und damit mehr Ladungsträger (Problem der Stabilisierung eines Lichtbogens z.B. der Bogenlampe).
Anwendungen der Leitung in Gasen sind: Ionisationskammer, Proportionalzähler, Geigerzähler, Vieldrahtkammer, Funkenkammer, Hochleistungsschalter usw.
3.2.5
Anwendungen der Gasentladung für Detektoren
Ionisationskammer, Proportionalzähler, Geigerzähler, Funkenkammer
ionisierendes Teilchen
-
-
+
-
V
+
-
C
+
+
1M
-
R
+
Eine Ionisationskammer kann als Plattenkondensator oder als
ein zylindrisches Zählrohr mit einem dünnen, zentrischen Kathodendraht gebaut werden (s. Fig.). Es wird mit speziell ausgewählten Gasen (CH4 , Argon) gefüllt. Von einem geladenen durchfliegenden Teilchen werden im Gas Ionenpaare gebildet, die von der
angelegten Spannung V zu einer Platte oder zum Draht
abgezogen werden und an dem Kondensator C ein
Np
Proportionalbereich
schnelles negatives Signal der Elektronen und ein langPlateau
sames positives Signal der Ionen erzeugen. Bei zu nied1
riger Spannung rekombinieren etliche Ionenpaare. In eiteilweise Rekombination
V nem Plateau werden alle primär gebildeten Ionenpaare
Np gesammelt (Ng ).
Bei einer steigenden Spannung setzt am Kathodendraht durch Stossionisation eine Gasverstärkung ein proportional zu Np (Proportionalbereich), die dann im Auslösebereich in
eine vollständige Gasentladung unabhängig von Np übergeht (Auslösebereich des Geigerzählers). Der Strom führt zu einem Spannungsabfall über R und die Gasentladung bricht
ab. Die bei der Entladung gebildeten langsamen Ionen werden durch Löschgaszusätze gebunden, damit keine ’Nachimpulse’ durch Sekundärelektronen im Detektor auftreten.
Eine Funkenkammer ist ein mit Gas gefüllter Plattenkondensator, mit einer Spannung knapp unter dem Durchschlag. Ein durchfliegendes geladenes Teilchen erzeugt eine
Ionisationsspur. Mit einem separaten, schnellen Szintillationszähler, in dem das durchlaufende Teilchen als Trigger nachgewiesen wird, wird die Hochspannung über die Durchschlagsspannung erhöht und es bildet sich ein Funken aus. Der Funken als Ort des Teilchendurchganges kann optisch oder akustisch registriert werden. Die Funkenkammer ist
langsam (. . . ms), da nach dem Funken alle Ionen abgesaugt werden müssen, bevor die
Kammer wieder empfindlich ist.
Eine Proportionalkammer ist ein mit Gas gefüllter Plattenkondensator mit gleichmässig angeordneten dünnen (20-50 µ)
Kathodendrähten, die im Proportionalbereich arbeiten und keine Stossionisation ausbilden. Der Ort des Teilchendurchganges wird elektronisch durch den Draht, an dem ein
Signal erzeugt wird, identifiziert. Die Proportionalkammer ist schnell (100ns-1µs), da die
Gasverstärkung sich nur an wenigen Drähten ausbildet. Zwei Kammern mit den Drähten
senkrecht oder unter einem Winkel zueinander ergeben die Ortsinformation mit der Genauigkeit des Drahtabstandes.
Ng
"
Auslosebereich
43
Bei einer Driftkammer wird mit einem zusätzlichen Detektor die Driftzeit der Elektronen zu einem Kathodendraht gemessen und damit sehr genau (bis 20µ) der Ort des
Teilchens bestimmt (zukünftige Anwendung für die Tomographie).
3.2.6
Leitung in Vakuumröhren
Die Elektrizitätsleitung in Vakuumröhren ist ein Sonderfall der unselbständigen Entladung im Hochvakuum. In einem Photomultiplier werden Elektronen mit der Photoemission durch Licht aus der Kathode herausgelöst und erzeugen einen Strom.
Im¶ ³Röhren mit geheizter Kathode können durch Thermoemission von
Elektronen Strom leiten. Bei der Thermoemission wächst mit steigender Temperatur die thermische Energie der Elektronen, so dass
¨¥
die rücktreibenden Spiegelkräfte an der Metalloberfläche überwunden
VA
werden können, Elektronen verdampfen.
Die Stromdichte der Glühemission ist gegeben durch
Sättigung
I
J = A T 2 e−W/kT
Richardson-Gleichung
k: Boltzmann-Konstante, A = 6.02 · 105 A/m2 K2 ist nach
der Theorie für alle reinen Metalle gleich.
Die Austrittsarbeit der Elektronen W ist eine Materialkonstante, die meist in Volt angegeben wird (Energie=eV vgl. Tabelle). Bei genügend hoher Anodenspannung VA erreicht
der Anodenstrom I den durch die Richardson-Gleichung gegebenen Sättigungsstrom.
Der Anodenstrom kann durch den Einbau eines Gitters als
Metall Austrittsdritte Elektrode gesteuert werden (Triode). Am für Elektronen
arbeit [V]
durchlässigen Gitter liegt die Gitterspannung VG bezüglich der
Pt
5.36
Kathode. Betrag und Vorzeichen von VG bestimmen den AnW
4.53
odenstrom. Bei einer ausreichenden negativen Gitterspannung
Ba
2.52
VG wird der Anodenstrom I = 0, während bei zunehmender
Cs
1.94
Gitterspannung I bis zur Sättigung zunimmt.
VA
Im
VA
¶³
¨¥
I
VG
V A klein
V A groβ
VG
44
4
Magnetostatik
~
~
Die Lorentz-Kraft und das B-Feld
und H-Feld
im Vakuum
4.1
~ und D)
~ erzeuIm Kapitel 2 wurde gezeigt, dass ruhende Ladungen elektrische Felder (E
gen. Der Ausgangspunkt war das Coulombsche Gesetz, das die elektrostatische Wechselwirkung zwischen punktförmigen Ladungen beschreibt. Die Erfahrung zeigt uns aber, dass
auch Körper existieren, deren Wechselwirkung weder mechanischer noch elektrostatischer
Natur ist. Zwischen zwei Kompassnadeln wirken z.B. Kräfte, deren Ursachen nicht durch
gravitative oder elektrostatische Kräfte erklärt werden können. Um solche Kraftwirkung
zu beschreiben, ist es notwendig, neue Felder, die magnetischen Felder, zu definieren.
4.1.1
Erfahrungstatsachen und Fundamentalgesetze
1. Bewegte Ladungen, d.h. elektrische Ströme erzeugen magnetischen Felder, denn in
der Umgebung eines stromdurchflossenen Leiters wird eine Kompassnadel im allgemeinen
abgelenkt.
2. In einem magnetischen Feld erfährt eine bewegte Punktladung eine Kraft F~ , die Lorentzkraft. F~ steht immer senkrecht zur Geschwindigk ~v der Ladung. Ihr Betrag ist proportional zur Ladung q und zu v.
~ so bestimmt werden,
Aufgrund dieser Tatsachen kann ein Vektor B
F~ 6
*B
¥ ©
s©© -
~
+q
dass gilt39
~v
~
F~ = konst. · q(~v × B)
(39)
~ ist ein magnetisches Feld, genannt magnetische Induktion.
B
~ in der Gl. (39) eine aus F~ , q und ~v abgeleitete
Da die Ladung q schon festgelegt ist, ist B
Grösse; in SI-Einheiten wird die Konstante konst.=1 gesetzt. Damit ist die Einheit der
40
magnetischen Induktion
·
¸
·
¸
·
¸
Ns
Nm s
Vs
[Tesla] =
= [T] =
=
.
2
m Cb
m Cb
m2
~ und ~v = 1 m/s der
Die Einheit von B, ein Tesla, bewirkt eine Kraft von 1 N, wenn B
Ladung q = 1 Cb senkrecht aufeinander stehen.
Das Kraftgesetz lautet also
~
F~ = q · (~v × B)
Lorentzkraft
(40)
Oft wird auch die Lorentzkraft mit der Coulombkraft zusammen zur Lorentzkraft des
elektromagnetischen Feldes zusammengefasst
~ + ~v × B)
~
F~ = q · (E
(41)
Damit haben wir alle Voraussetzungen der Dynamik der elektromagnetischen Wechselwirkung formuliert.
Da Strom bewegte Ladung ist, erfährt ein Leiter mit einer Stromstärke I in einem
39
Als Merkregel benutzen wir für die Richtung der Kraft die rechte Handregel mit einer positiven
Ladung. Man beachte, dass, wie später in der Teilchenphysik dargelegt wird, die elektromagnetische
~
Wechselwirkung invariant ist gegenüber Rechts- oder Links-Drehungen (Paritätserhaltung). Da das BFeld ein Axialvektor ist, muss im Vektorprodukt die rechte Handregel zweimal angewandt werden, um
die Kraft als einen polaren Vektor zu erhalten. Vergleiche Phys AI Fussnote 11 S.9.
40
In SI-Einheiten ist die Lichtgeschwindigkeit in den elektrischen Einheiten enthalten, im cgs-System
tritt sie dagegen in den magnetischen Einheiten auf.
45
F~ 6
~
~
B-Feld
eine Kraft. Ist d~ℓ ein Leiterelement, so ist diese dF~ = dq (~v × B),
~
wobei gilt dq = I dt und ~v = ddtℓ , und damit
~
* B©
-©
d~ℓ
~
dF~ = I (d~ℓ × B)
I
(42)
~ das magnetische Feld definiert worden ist, können wir
3. Nachdem durch den Vektor B
auch die Tatsache, dass es keine magnetischen Punktladungen (Monopole) sondern nur
Dipole gibt, durch eine Gleichung zum Ausdruck bringen. Man kann in der Magnetostatik
auch ein Coulomb’sches Gesetz für die magnetischen Polstärken aufstellen. Also kann auch
~
der Satz von Gauss Gl. (24) auf das B-Feld
angewandt werden. Da aber in irgendeinem
Volumen die Summe der Polstärken Null ist, muss der Feldfluss Φ des Feldes durch eine
geschlossene Fläche A verschwinden. Damit lautet dieses Fundamentalgesetz
Φmag = Φ =
I
A
~ · dA
~=0
B
[Vs] = [Weber] = [Wb] (43)
dA
und differentiell als 2. Maxwell’sche Gleichung
B
∂Bx ∂By ∂Bz
~ =∇
~ ·B
~ =0.
+
+
= div B
∂x
∂y
∂z
Das magnetische Feld ist quellenfrei, d.h. es gibt keine magnetischen Punktladungen (magnetische Monopole). Die Feldlinien sind geschlossen.
Woher kommen dann die magnetischen Felder? - Wir haben unter 1. gesehen, dass
elektrische Ströme Magnetfelder erzeugen. Damit wollen wir uns jetzt genauer befassen.
4.1.2
Die Gesetze von Biot-Savart und Ampère
Ein Magnetfeld übt eine Kraft auf eine bewegte Ladung aus, und da Strom bewegte Ladung ist, auch auf einen stromdurchflossenen Leiter. Da actio=reactio gilt, muss auch
der stromdurchflossene Leiter auf das Magnetfeld wirken. Ein Magnet wirkt auf einen
anderen Magneten; also muss der stromdurchflossene Leiter (oder eine bewegte Ladung)
auch ein Magnetfeld erzeugen. Weiter überlegt man sich: Wenn ein Strom ein Magnetfeld
erzeugt und zwei Magnete untereinander wechselwirken, müssen auch zwei stromdurchflossene Drähte über ihre erzeugten Magnetfelder aufeinander wirken. Dies legt nahe, dass
atomistisch auch ein Permanentmagnet durch Ströme erklärt werden kann.
Frage: Wie sieht das Magnetfeld eines gegebenen Stromes (resp. einer bewegten Ladung) aus? - Die Antwort auf diese Frage wurde durch Ampère mit mehreren Experimenten gegeben:
~ steht senkrecht
Das von einem Leiterelement d~ℓ mit einem Strom I erzeugte Feld dB
~
zum Leiterelement dℓ und senkrecht zum Ortsvektor (~r − ~rℓ ) zwischen diesem und dem
~
Ort des B-Feldes.
Dieser Zusammenhang kann durch das Vektorprodukt d~ℓ × (~r − ~rℓ ) beschrieben werden. Weiter nimmt der Betrag des B-Feldes mit dem Quadrat des Abstandes
ab41 .
41
Der Fluss durch eine geschlossene Kugelfläche ist konstant.
46
Damit ist das vom Strom I im Leiterelement d~ℓ am Ort ~rℓ erzeugte
I
³
³
1
d~ℓ ³
~
¨ dB
³ ³ -6
1
³
³
r − ~rℓ ¢̧
K~
A
A
~rℓ A
~ am Ort ~r
Feld dB
¢
¢~
r
A c¢
~ = konst · I
dB
d~ℓ × (~r − ~rℓ )
|~r − ~rℓ |3
~
Über die Proportionalitätskonstante kann man infolge der Festlegung der B-Feldstärke
nicht mehr frei verfügen. Es ist
konst =
Vs
µ0
= 1 · 10−7
,
4π
Am
Induktionskonstante42 µ0 = 4π · 10−7
~ =
Somit gilt dB
Vs
Am
(exakt).
µ0 d~ℓ × (~r − ~rℓ )
I
,
4π
|~r − ~rℓ |3
Z
d~ℓ × (~r − ~rℓ )
~ = µ0 I
beziehungsweise B
4π
|~r − ~rℓ |3
Leiter
Biot-Savart’sches Gesetz
im Vakuum
Analog zur Elektrostatik ist es wiederum zweckmässig, ein weiteres magnetisches Feld
~ = µ0 H
~
B
(im Hinblick auf ein Medium) zu definieren. Man setzt für das Vakuum
~ die magnetische Feldstärke. Das Biot-Savart’sches Gesetz43 lautet somit
und nennt H
~
~ = I dℓ × (~r − ~rℓ ) ,
dH
4π |~r − ~rℓ |3
d~ℓ × (~r − ~rℓ )
I Z
~
H=
4π Leiter |~r − ~rℓ |3
resp.
44
Die Einheit der magnetischen Feldstärke
·
(44)
¸
H ist Amp
m .
Wie sieht nun das magnetische Feld eines langen, geraden Leiters45 mit Strom I aus?
Wir wenden das Biot-Savart’sche Gesetz an und finden
I
d~ℓ ϑ
~
ρ→
~ = I |dℓ × ρ~| = I dℓ sin ϑ , mit
ℓ
bei P
|dH|
4π
ρ3
4π ρ2
ϕ
r→
→
P
dH
ρ=
r
,
sin ϑ
ℓ = −ρ cos ϑ = −r cot ϑ,
42
dℓ =
r dϑ
sin2 ϑ
oder absolute Permeabilität.
Jean-Baptiste Biot 1774-1863
44
Das “wirkliche” Magnetfeld, das auf bewegte Ladungen ein Kraft ausübt, ist die magnetische In~ Die magnetische Feldstärke H
~ dagegen kann man aus gegebenen (makroskopischen) Strömen
duktion B.
~ das “wirkberechnen. Die Situation ist ähnlich wie in der Elektrostatik. Dort ist das elektrische Feld E
~ hingegen kann aus
liche”, welches auf Ladungen eine Kraft ausübt. Die dielektrische Verschiebung D
einer gegebenen (typisch vom Experimentator vorgegebenen) Ladungsdichte ρ berechnet werden. Die
~ = µ0 H
~ und D
~ = ǫ0 E
~ können einen dazu verleiten,
Namensgebung und die Beziehungen (im Vakuum) B
~
~
~
~
einerseits das E- und H-Feld und andrerseits das D- und B-Feld einander zuzuordnen. Man soll das
~ und B
~ sind die “wirklichen” Felder, D
~ und H
~ dagegen
jedoch auf keinen Fall tun und sich merken: E
kann man als Hilfsfelder oft einfacher berechnen.
45
~ ist unabhängig von ϕ.
Es muss Zylindergeometrie gelten, d.h. |dH|
43
47
I sin ϑ dϑ
4π
r
Z π
I
I
I
·2=
.
und H =
sin ϑ dϑ =
4πr 0
4π r
2πr
Die Magnetfeldlinien sind konzentrische Kreise.
I
ergibt sich dH =
→
H
Mit dem “Umlaufintegral” längs einer Feldlinie ist mit der
Rotationssymmetrie H(ϕ) =konst.
I
dϕ
I
ro
→
d~ℓ H
Z
2π
0
H dϕ r0 =
Z
2π
0
1
I
dϕ r0 = I 2π = I
2π r0
2π
und damit
H = I/(2π r◦ ), wie oben berechnet.
Dasselbe Resultat erhält man auch, wenn der IntegrationsH
weg eine beliebige Kurve ist:
d
d
~ · d~ℓ =
H
ro
~ · d~ℓ = H dℓ cos α = H r0 dϕ =
H
d cos
I
I
r0 dϕ =
dϕ.
2π r0
2π
Also gilt für eine beliebige Kurve das Gesetz von Ampère:
I
~ · d~ℓ =
H
P
X
I
(elektromagnetische Verkettung)
Hierbei stellt
I die Summe aller Ströme dar, die durch den Integrationsweg eingeschlossen werden. I ist dabei positiv zu rechnen, wenn die Stromrichtung in Bezug auf die
Integrationsrichtung einer Rechtsschraube entspricht.
H
~ · d~ℓ = P I der Magnetostatik entspricht (in einem
Das Ampère’sche Gesetz C H
H
~ · dA
~ = 1 P Q der Elektrostatik.
gewissen Sinne) dem Gauss’schen Satz Gl. (7) A E
ǫ0
~
Es kann in Spezialfällen (z.B. Symmetriebetrachtung wie oben) zur Berechnung von H
benutzt werden.
Diese elektromagnetische Verkettung (Verkettung von Magnetfeld und bewegter Ladung) wird zur Definition des Ampère benutzt: Wir wollen die Kraft zwischen zwei geraden
und parallelen, stromdurchflossenen Leitern betrachten. Die magnetische Induktion B1
µ 0 I1
herrührend von I1 am Ort I2 ist B1 =
.
I1
2π d
I2
.
Die Kraft dF auf ein Leiterelement dℓ2 beträgt nach Gl.(42)
d
dF
d
B1
d~ℓ
dF = I2 dℓ2 B1 =
µ 0 I1 I2
dℓ2 .
2π d
Parallele Ströme ziehen sich an, antiparallele stossen sich ab46 .
Die gesetzliche Definition des Ampère47 und damit auch des Coulomb beruht auf dieser
Kraftwirkung. Ist nämlich I1 = I2 = I, d = 1 m und beträgt die Kraft pro Längeneinheit
46
vgl. die Stabilisierung eines Elektronen- oder Ionenstrahls gegen die Coulombabstossung
André-Marie Ampère (1775-1836) in Polémieux (Rôhne). Der Vater war Händler und Stadtrat in
Lyon, er wurde als Gegner der Republik 1793 unter der Guillotine hingerichtet. Napoléon machte Ampère
zum Professor für Mathematik in Bourg und 1809 in Paris. Da er eine Einladung Napoléons vergass,
sagte man ihm Zerstreutheit nach. Nach Oerstedts Entdeckung der Elektrizität und Magnetismus fand
Ampère nach einer Woche die rechte Handregel und es folgten: die einen Leiter umkreisende Kraft,
47
48
2 · 10−7 N/m, so setzt man I = 1 Ampère. Die Induktionskonstante µ0 bekommt damit
µ0 = 4π · 10−7
den uns bekannten Wert von
C
dA
dr
I
B
C
H x (y)
dx
z
1
dy
4
2
dy
H y (x)
3
dx
Am
~ · d~r =
H
Z
A
jn dA =
Z
A
~
~j · dA
H x (y+dy)
H y (x+dx)
~ · d~r = Hx (x, y, z) dx + Hy (x + dx, y, z) dy
H
− Hx (x, y + dy, z) dx − Hy (x, y, z) dy
= jz dx dy ,
y
x
Analog gilt
Vs
Wählen wir für C ein Rechteck in der xy-Ebene
mit infinitesimalen Seitenlängen dx und dy, so
gilt für diesen differentiellen Weg
jz
x,y,z
oder
A2
Hat man eine Stromverteilung mit der Stromdichte ~j und
ist C wiederum eine geschlossene Kurve, welche die Fläche
A umrandet Rund ist ferner dA ein Flächenelement von A,
P
so ist I = A jn dA. Sei nun d~r ein Linienelement von C;
dann lautet das Ampère’sche Gesetz
j
jn
N
oder
∂Hz ∂Hy
∂Hx ∂Hz
−
= jx und
−
= jy ;
∂y
∂z
∂z
∂x
∂Hy ∂Hx
−
= jz .
∂x
∂y
~ =∇
~ ×H
~ = ~j
d.h. rot H
(45)
Die ist die 4. Maxwell’sche Gleichung (vgl. S.85) für stationäre Zustände. Das Magnetfeld
ist also ein Wirbelfeld mit dem elektrischen Strom als Ursache. Existieren elektrische
Ströme, dann sind diese von geschlossenen magnetischen Feldlinien umgeben (vgl. Glei~ = ∇×H
~ 6= 0, existiert kein magnetisches skalares Potential,
chung (43)). Da also rot H
wie im folgenden Kapitel 4.1.3 diskutiert wird; dies im Gegensatz zur Elektrostatik, wo
~ =∇×E
~ = 0 gilt.
rot E
4.1.3
Das Vektor-Potential
†
Die Maxwell-Gleichungen (76) stellen eine reine mathematische Struktur der elektromagneti~ B
~ sind miteinander gekoppelt und sie sind die beiden Observablen
schen Wechselwirkung dar. E,
(physikalisch messbare Grössen) dieser Wechselwirkung. Die Lösungen der Maxwell-Gleichungen
mit entsprechenden Randbedingungen sollten alle physikalischen Phänomene beschreiben, wenn
die Grundgleichungen richtig sind. Dabei beschreiben die Randbedingungen ∂/∂t = 0 die Elektrostatik und Magnetostatik, ∂/∂t 6= 0 die Elektrodynamik und die Erzeugung von elektromagnetischer Strahlung, sowie ρ = 0, j = 0 das Verhalten im Vakuum (vgl. Kap. ?? sowie Physik
III und theoretische Physik Elektrodynamik).
~
Zur Lösung der Maxwell-Gleichungen versucht man das E-Feld
(polarer Vektor beinhaltet
~
eine Richtung) und das B-Feld
(Axialvektor beinhaltet einen Drehsinn) durch mathematische Grössen darzustellen, die einfacher zu behandeln sind. Mathematisch können physikalische
Anziehung stromdurchflossener Leiter, Kreisströme als magnetische Dipole, Magnetismus als Kreisströme
im Magneten.
49
Grössen durch den Differentialoperator ∇ in der Stufe erhöht oder erniedrigt werden48 . Diese
~
Reduktion führte beim E-Feld
mit Gl. (3) zum skalaren elektrostatischen Potential V (~r) und
mit der 1. Maxwell Gleichung (9) zur Poisson’schen Differentialgleichung (10).
~ als nichtkonservatives Wirbelfeld kann nun nicht durch ein skalares
Das Axialvektorfeld B
Potential dargestellt werden49 . Es kann jedoch eine allgemeine Relation des Operators ∇ benutzt
~
~ = 0 (es gibt keine magnetischen
werden zusammen mit der Quellenfreiheit des B-Feldes
∇·B
Monopole).
~ = 0 = div rotA.
~ Damit kann (∇ × A)
~ =B
~
Für jedes Vektorfeld gilt allgemein ∇ · (∇ × A)
~
~
gesetzt werden und B wird durch ein Vektorpotential A dargestellt:
~ r, t) = ∇ × A(~
~ r, t)
B(~
(46)
∂
~ ist
= 0, t wird weggelassen. Das Vektorpotential A
Im folgenden ist in der Magnetostatik ∂t
analog zum skalaren Potential V keine Observable und es kann wie zu V eine beliebige vektorielle
~ addiert werden. Die Beziehung B
~ =∇×A
~ bleibt auch dann erhalten. Es kann
Konstante zu A
auch der Gradient eines skalaren Potentials ∇ψ addiert werden, da allgemein gilt ∇ × ∇ψ = 0.
~ festgelegt, z.B.
Diese Willkürlichkeit wird i.a. durch eine Zusatzbedingung (Eichung50 ) von A
2A
~
~
~
~
mit ∇· A = 0. Es gilt dann mit der Vektorbeziehung [Anhang C.2] ∇×(∇× A) = ∇(∇· A)−∇
~
~ = ∇ (∇ · A)
~ −∇2 A
~ = µ◦~j = ∇ × (∇ × A)
∇×B
| {z }
=0
~ = ∆A
~ = −µ◦~j
⇒ ∇2 A
Diese Gleichung ist die zu V analoge Poissongleichung des Vektorpotentials, die für die Komponenten Ax Ay Az als skalare Differentialgleichungen ∆Ax = −µ◦ jx usw. geschrieben werden
kann51 . Mit entsprechenden Randbedingungen können dann Lösungen der Magnetostatik gefunden werden.
4.2
Anwendungen der Gesetze von Lorentz, Ampère und BiotSavart
~ · d~r = jn dA (= I) nur in Spezialfällen besonDas Ampère’sche Gesetz kann als C H
A
~ entlang dem Integraders einfacher Geometrie angewandt werden (wenn zum Beispiel H
tionsweg konstant ist). Normalerweise benutze man das Biot-Savart’sche Gesetz oder die
R
H
P
48
Vergleiche die Tensoralgebra. [Skript Physik AI Anhang C.2 und C.4].
~ = 0 damit E
~ = −∇V (~r) und mit ∇ · E
~ = ρ/ε◦ erhält man ∆V (~r) = −ρ/ε◦ . Wegen
Es ist ∇ × E
~
~
~
∇ × B = µ◦ j 6= 0 ist dieser Weg für B nicht möglich.
50
~ + ε◦ µ◦ ∂V = 0 die Lorentz-Eichung. Hier in der Elektro- und MagneIn der Elektrodynamik ist ∇ · A
∂t
~ = 0. Aus praktischen mathematischen Gründen werden auch andere Eichungen
tostatik ist dann ∇ · A
benutzt.
51
In der Relativitätstheorie ist es zweckmässig das vierdimensionale Raum-Zeit-Kontinuum durch
den vierdimensionalen Vektor rµ = (ct, x, y, z) zu beschreiben. Analog ist das Viererpotential
~ und B-Feld
~
Aµ = (V /c, Ax , Ay , Az ). Das Ekann dann mit dem elektromagnetischen Feldtensor
0 −Ex −Ey −Ez
dargestellt werden.
Ex
0 −Bz
By
In SI-Einheiten ersetze
F µν =
p
Ey
√
Bz
0 −Bx
E → 4πε◦ E und B → 4π/µ◦ B.
Ez −By
Bx
0
49
Der Feldtensor zeigt in der Vereinheitlichung des magnetischen und elektrischen Feldes zur elektromagnetischen Wechselwirkung, dass beide Felder verschiedene Ansichten“ der einzigen elektromagnetischen
”
Wechselwirkung sind.
50
~ ×H
~ = ~j und auch ∇
~ ·B
~ = 0 oder auch
differentielle Form des Ampère’schen Gesetzes ∇
~ = −µ◦~j. (Vgl. auch die Elektrostatik, in der man eher von
das Vektorpotential mit ∆A
der Poissongleichung als vom Gauss’schen Satz ausgeht.)
4.2.1
Das magnetische Feld eines Kreisstromes
~ auf der Achse eines Kreistromes52
Wir berechnen zunächst das magnetische Feld H
~ =
dH
mit Gl.(44) zu
I d~ℓ × (~r − ~rℓ )
,
4π |~r − ~rℓ |3
~ der einzelnen Leitungselemente d~ℓ liegen auf eidabei ist d~ℓ ⊥ (~r − ~rℓ ). Die Beiträge dH
nem Kreiskegel, dessen Achse die Achse des Kreisstromes ist (z-Richtung). Also liegt
~
das resultierende dH-Feld
in der z-Richtung. Es ist
z ϑ →
dH
.
→
r
dℓ
. dϕ
dHz =
~r − ~rℓ
ϑ
~rℓ
ro
I
dHz =
I dℓ cos ϑ
;
4π |~r − ~rℓ |2
dass gilt
|~rℓ | = r0 ,
cos ϑ = q
I
r02 dϕ
,
4π (r02 + z 2 ) 32
r0
r02
+ z2
also
wobei man aus der Skizze sieht,
|~r| = z ,
|~r − ~rℓ | =
q
r02 + z 2 ,
und dℓ = r0 dϕ . Eingesetzt ergibt dies
H(z) =
Z
2π
ϕ=0
dHz =
I r02
3
2 (r02 + z 2 ) 2
.
Für den Mittelpunkt z = 0 der Stromschleife gilt H(0) = I/(2 r0 ) . Für Punkte auf der
z-Achse, die weit von der Stromschleife entfernt liegen, also für z ≫ r0 , erhalten wir
H(z) =
I π r02
IA
1
I r02
=
=
∝ 3 ,
3
3
3
2z
2π z
2π z
z
(47)
wobei A = π r02 die vom Strom eingeschlossene Fläche darstellt.
Wir vergleichen dieses letzte Resultat mit der entsprechenden Feldstärke ei6
nes elektrischen Dipols mit dem Dipolmoment p~ = q ~ℓ. Für Punkte auf der
6
E(z)
Symmetrieachse ist
z
u−q
6
~
u+q
◦
ℓ
E(z) =
1
1
q
1
q 1
1
(
(
)
ℓ 2 −
ℓ 2) =
ℓ 2 −
2
4π ǫ0 (z − 2 )
4π ǫ0 z (1 − 2z )
(z + 2 )
(1 + 2zℓ )2
Für z ≫ ℓ benutzen wir die Näherungen
ℓ
ℓ
ℓ
ℓ
q·ℓ
p
1
(1 − )−2 ≈ 1 + , (1 + )−2 ≈ 1 −
und finden E(z) =
=
∝ 3
3
3
2z
z
2z
z
2π ǫ0 z
2π ǫ0 z
z
Der Vergleich mit Gleichung (47) zeigt, dass eine Stromschleife und ein elektrischer Dipol
die gleiche Ortsabhängigkeit der Feldstärken haben. Ausführlichere Rechnungen ergeben
ferner, dass dies nicht nur für Punkte auf der Symmetrieachse, sondern für ganz beliebige
52
Dies ist die klassische Berechnung des magnetischen Dipolfeldes eines in einer Bohr’schen Bahn
gebundenen Elektrons, das in der Atomphysik zur Feinstrukturaufspaltung führt, der Wechselwirkung
des magnetischen Moments des Spins des Elektrons mit dem Dipolfeld der Bahn (Spin-Bahn-Kopplung).
51
Punkte des Raumes der Fall ist, wenn deren Abstände gross gegen ℓ bezw. r0 sind. Eine
Stromschleife besitzt somit ein magnetisches Dipolmoment 53
m→m
~.
m
~m =IA
I
(48)
Da das Vorzeichen des Magnetfeldes eines magnetisches Dipols von der Stromrichtung in
der Stromschleife abhängt, kann man das Diplomoment mm auch als Vektor schreiben.
m
~ m steht senkrecht auf der Kreisstromfläche, seine positive Richtung ist durch die RechteHand-Regel bestimmt.
Das Nah-Feld eines elektrischen Dipols und eines magnetischen Dipols sehen folgendermassen aus:
Auch ein langes, permanent magnetisiertes Stahlstäbchen (z.B. eine Komelektrisches Dipolfeld
magnetisches Dipolfeld
passnadel) erzeugt in grossen Distan~
zen ein H-Feld,
das äquivalent demje+
nigen eines geeignet gewählten Kreisstromes ist. Ein solches Stäbchen besitzt also auch ein magnetisches Dipolmoment.
4.2.2
Das Magnetfeld einer langen Spule (Solenoid)
deren N Windungen dicht nebeneinander liegen und deren Länge ℓ gross gegenüber dem
Durchmesser ist. Dann beobachtet man, dass das Feld ausserhalb der Spule sehr schwach
ist im Verhältnis zum Feld im Innern.
Für den eingezeichneten, geschlossenen Weg ABCD gilt
A
B
D
C
I
~ · d~r =
H
ZB
A
~ · d~r +
H
ZC
B
~ · d~r +
H
ZD
C
~ · d~r +
H
ZA
D
~ · d~r =
H
= 0 + 0 + HℓCD + 0 = HℓCD = nI = Nℓ ℓCD I
Nach dem Ampère’schen Gesetz ist dieses Integral gleich dem durch das Rechteck fliessenden Strom, das heisst, wenn n = Nℓ ℓCD die Anzahl Windungen auf der Strecke ℓCD
ist, dann ist nI der gesamte Strom durch das Rechteck ABCD, und somit gilt für das
Feld im Innern einer langen Spule
N
H=
I.
(49)
ℓ
Dieses Feld ist unter Vernachlässigung der Randeffekte homogen, es ist nicht vom Ort
abhängig.
4.2.3
Magnetischer Dipol im homogenen Magnetfeld (oder Messung des Erdfeldes mit einer Kompassnadel)
Wir wollen die Bewegungsgleichung eines magnetischen Dipols, z.B. einer Kompassnadel,
in einem homogenen Magnetfeld herleiten. Auf Grund der Ähnlichkeit zwischen elektri53
Der Ausdruck “magnetisches Dipolmoment” ist etwas irreführend, da es sich ja nicht um magnetische
Pole handelt, sondern um eine elektrische Stromschleife, deren Magnetfeldlinien bei grossem Abstand den
gleichen Verlauf zeigen wie die Feldlinien des elektrischen Dipols.
52
schen und magnetischen Dipolen denken wir uns die Kompassnadel durch zwei magnetische “Ladungen” (Polstärken) +p und −p ersetzt, welche den Abstand ℓ haben.
Das Dipolmoment ist also m
~ m = p~ℓ, wobei ~ℓ von −p nach +p
B
weist (wie beim elektrischen Dipol). Die resultierende Kraft
+F
+p
~ ist Null, das Feld übt aber ein Dreheines homogenen Feldes B
moment aus. Bezüglich des Schwerpunktes gilt (Drallsatz)
Is
-p
d2 ϕ
= M = −F · ℓ · sin ϕ = −Bp · ℓ · sin ϕ = −Bmm sin ϕ .
dt2
~ =m
~ geIn Vektorform kann das Drehmoment als M
~m×B
schrieben werden. Für kleine Auslenkungen ϕ gilt
s
B mm
d2 ϕ
.
Is 2 = −B mm ϕ mit der Lösung ϕ(t) = ϕ0 cos(ω0 t − δ) , wobei ω0 =
dt
Is
-F
Diese Schwingung kann man dazu benutzen, das Erdmagnetfeld BE zu messen.
BS
Man misst zuerst die Kreisfrequenz ω0 =
I
s
BE
BE mm
Is
(50)
der Kompassnadel im Erdmagnetfeld BE . Dann überlagert man
dem Erdfeld BE das Feld BS = µ0 Nℓ I eines Solenoids in der
Weise, dass beide Feldstärkevektoren parallel stehen. Jetzt lautet
die Bewegungsgleichung für die Kompassnadel
Is
d2 ϕ
N
= −(BE + µ0 I)mm sin ϕ . Für kleine Auslenkungen
2
dt
ℓ
ist die Bewegung harmonisch mit der Kreisfrequenz ω =
Aus (50) und (51) folgt
µ
ω
ω0
¶2
BE + µ0 Nℓ I
=
,
BE
v
u
u (BE + µ0 N I)mm
t
ℓ
Is
.
(51)
µ0 Nℓ I
µ0 Nℓ I
= T0 2
.
also BE = ω 2
( ω0 ) − 1
(T ) −1
Man misst dabei die Schwingungsdauern T , T0 und für das Zusatzfeld N , ℓ und I.
4.2.4
Bestimmung der Masse eines Elektrons
Wenn die Elementarladung e bekannt ist und das Verhältnis e/m der Ladung zur Masse
m gemessen wird, kann man daraus m bestimmen. Bewegen sich Elektronen (Ladung −e)
~.
in einem Magnetfeld, so wirkt die Lorentzkraft F~ = −e ~v × B
~ homogen und senkrecht auf ~v , so bleibt ~v ⊥ B
~ und es ist F = |F~ | = e v B,
Ist B
53
wobei F~ immer senkrecht zu ~v steht. Die Bahnkurve ist deshalb
"
Elektronenrohre
Heizung
B
v
F
- +
ein Kreis (Radius ρ)
x
m v2
=evB,
ρ
also
e
v
=
. (52)
m
ρB
Werden die Elektronen mit einer Beschleunigungsspannung V
auf die Geschwindigkeit v gebracht, so ist
V
-x
m 2
v = eV ,
2
also v =
s
2e V
.
m
e 2
2e V
) =
, also
m
m ρ2 B 2
Ist x die Ablenkung des Elektronenstrahls auf dem Leuchtschirm
strahlröhre und ℓ der Abstand des Leuchtschirms vom Eintrittsloch, so
Setzt man Gl. (53) in (52) ein, so folgt (
(ρ − x)2 + ℓ2 = ρ2
und ℓ2 = x(2ρ − x) bzw. ρ =
ℓ2 + x 2
2x
d.h.
(53)
2V
e
= 2 2.
m
ρ B
einer Kathodengilt
e
8 x2 V
= 2 2
.
m
B (ℓ + x2 )2
Experimentelle Werte [Phys. Rev. D 50(1994)1233]:
e/m = 1.758 805(5) · 1011 C/kg, m = 9.109 389 7(54) · 10−31 kg
Analog erhält man für die Masse eines Protons mP = 1.672 623 1(10) · 10−27 kg .
Die Gleichung (52) kann auch mit dem Impuls p = mv des Teilchen in MeV/c
(1eV= 1.6 · 10−19 J) als Merkformel der Teilchenphysiker ausgedrückt werden:
p · c [MeV] = 3 · B [T] · ρ [cm]
(54)
3 ist die aufgerundete Zahl der Lichtgeschwindigkeit c.
4.2.5
Das Wien-Filter (elektrostatischer Sparator)
Ein geladenes Teilchen (Ladung q) wird mit der Gschwindigkeit ~v durch ein gekreuztes
~ und B-Feld
~
~ und B-Feld
~
Egeschickt, so dass sich die Ablenkungen durch das Egerade
kompensieren, d.h. Teilchen mit der gleichen Geschwindigkeit können gefiltert werden.
~ = mv 2 /ρ bestimmt
Beachte: Die Ablenkung in einem Magnetfeld mit Fm = q|(~v × B|
mit dem Krümmungsradius ρ den Impuls mv = qρB eines Teilchens. Die Ablenkung x
~ senkrecht zu v längs ℓ bestimmt die kinetische
in einem elektrischen Feld mit Fe = q|E|
1
Energie 12 mv 2 = 4x
qEℓ2 eines Teilchens.
4.2.6
Der Halleffekt
b− > b+ I ~
E
½
½
?
−
~
E
− ¾H
−
6
~v−
− ~
F
− ¾L
−
¡
− ¡
~v+
−
?
¡
−
~
B
¡
¡
ª
¾
a
?
6
¡
+
+
+
+
+
+
+
+
+
ℓ
?
¶
¶¶
7
¶
/d
-¶
j VH
µ
¡
¡
~ geWird ein stromdurchflossenes Metall in ein Magnetfeld B
~ senkrecht zur Stromrichtung steht, so bewirkt
bracht, so dass B
die Lorentzkraft F = q v B auf die Leitungselektronen eine
seitliche Verschiebung der Elektronen. Die + und − Ladungen
werden bei konventioneller Richtung des Stromes I durch die
Lorentzkraft auf dieselbe Seite des leitenden Metalles abgelenkt.
Beachtet man nur die Elektronen, dann entsteht senkrecht zur
ursprünglichen Elektronenbahn (und damit zur Richtung des an~
gelegten äusseren E-Feldes)
ein elektrisches Feld EHall , das so
lange anwächst, bis sich ein Gleichgewicht zwischen der Lorentzkraft und der Kraft des Hall-Feldes EH (analog zur Bedingung
54
des Wien’schen Filters Kap.4.2.5) einstellt:
q EH = q v B und EH = vB.
Senkrecht zum Strom I kann zwischen den gegenüberliegenden, geladenen Flächen des
Metalles die Hallspannung VH gemessen werden: VH = EH a = v− B a.
~ sowie |E|
~ = V = IR = I
Mit der Beweglichkeit b− und der Geschwindigkeit ~v− = −b− E
ℓ
ℓ
σA
ist
VH = −b− I
B
σ·d
und für beide Ladungen
VH =
b+ − b− I B
IB
·
=c·
,
σ
d
d
es gibt nur eine Hall-Spannung, wenn b− 6= b+ ist. Die Hall-Konstante c = (b+ − b− )/σ
h 2i
kann positive und negative Werte annehmen und damit zu
Hall-Konstante m
As
positiven und negativen Hall-Spannungen führen. Der Wert
c(Cu)= −5.3 · 10−11
für Wismut ist abnorm gross. Da VH ∝ B/σ ist, können
c(Bi)= −5.0 · 10−7
mit dem Hall-Effekt Magnetfelder oder die Leitfähigkeit σ
c(Cd)= +6.0 · 10−11
gemessen werden.
1980 entdeckten Klaus von Klitzing54 , G. Dorda und M. Pepper, dass in dünnen praktisch zweidimensionalen Silizium-MOSFET’s bei hohen Magnetfeldern (≈ 20 T) und tiefen Temperaturen (≈ 1 K) der Hall-Widerstand RH = VH /I = c · B/d als Funktion der
angelegten Spannung (Gatespannung) charakteristische Stufen aufweist, die mit der zweidimensionalen räumlichen Quantisierung der Elektronendichte erklärt werden können.
Der reziproke Widerstand 1/RH folgt mit 1/B in Stufen genau bei ganzen Zahlen von
h/(e2 RH ). Mit diesem Quanten-Hall-Effekt konnte mit hoher Genauigkeit die Kombination der Naturkonstanten h/e2 oder auch die Feinstrukturkonstante α gemessen werden.
4.2.7
Bewegung eines geladenen Teilchens im Solenoidfeld
Die allgemeine Bahnkurve eines geladenen
Teilchens in einem homogenen Magnetfeld
B
B
ist eine Schraubenlinie (vgl. Praktikumsy
z
versuch e/m). Es ist einfach zu zeigen,
dass ein Solenoidfeld in erster Ordnung
(vz =konst) wie eine Linse für geladene
v z =konst
Quelle=Bild
Quelle
Bild
Teilchen fokussierend wirkt (Fig.).
Mit der
Geschwindigkeit des Teilchens ~v = (vx , vy , vz ), vz =konst und vx , vy ≪ vz variabel,
q
v⊥ = vx2 + vx2 in der x-y-Ebene ist
x
x
"
Einhullende
sin z/2
→
qv⊥ B =
2
mv⊥
v⊥
qB
⇒
= ωC =
R
R
m
→
die Zyklotronfrequenz, TC =
2πR
2πm
=
v⊥
(qB)
die Umlaufzeit unabhängig von v⊥ und R. Damit werden alle Teilchen in der x-y-Ebene
nach der konstanten Zeit TC im Ursprung dem Bildpunkt bei z = vz TC fokussiert55 .
Laufende Energieverluste des Teilchens durch Ionisation und Anregung im Gas oder
Materie ändern die Schraubenlinie in eine Spirale (siehe Blasenkammeraufnahmen).
54
Klaus von Klitzing Nobelpreis 1985, z.B. Physikalische Blätter 41(1985)357 und 401.
MOSFET: Metal Oxide Semiconductor Field-Effect Transistor
55
Zur Fokussierung geladener Teilchenstrahlen werden vor allem magnetische Quadrupol- und Sextupollinsen für hochenergetische Teilchen (z.B. PSI, CERN) und in der Elektronenmikroskopie [H.Rose et
al. Phys.Blätter 54(1998)411] benutzt.
55
4.3
~ und B-Feld
~
Gedanken zum E-
†
~ ist proportional zur Geschwindigkeit, die jedoch vom gewählten
Die Lorentzkraft F~L = q ·(~v × B)
Inertialsystem abhängt. Man kann ein Inertialsystem wählen, in dem die Ladung in Ruhe ist. Die
Lorentzkraft verschwindet dann. Es müssen jedoch die physikalischen Gesetze unabhängig vom
Inertialsystem sein. Dieses Problem kann man nach Feynman56 mit einem Gedankenexperiment
lösen.
Wir betrachten eine Ladung −q, die sich mit der Geschwindigkeit ~v◦ neben einem ungeladenen Draht (ρ− = ρ+ ) bewegt. Im Draht fliesst ein Strom I. Wir nehmen an, die Elektronen im
Draht bewegen sich ebenfalls mit ~v◦ und die positiven Ladungen sind in Ruhe.
Im Laborsystem ist die Kraft auf −q:
Laborsystem:
v◦
−q e I
6
FL = |F~L | = q v◦ B = q v◦ µ◦
.
r
2π r
ρ− ρ
¾
Leiter +
I
Da die positiven und negativen Ladungsdichten
v− = v ◦
v+ = 0
gleich sind |ρ | = |ρ |, gibt es keine Coulomb¾
ℓ
Strom I = ρ− A v◦ ,
Bewegtes System:
−q e
6
r
Leiter
¾
ρ′+
′ = −v
v+
◦
−
kraft. Mit dem Drahtquerschnitt A ist der
ρ− A
ρ+ A
und die Lorentzkraft FL = q v◦2 µ◦
= q v◦2 µ◦
.
2π r
2π r
ρ′−
′ =0
v−
¾
+
-
¾
I
Im Ruhesystem der Ladung −q gibt es keine Lorentzkraft, sondern nur elektrische Kräfte.
Die Elektronen und die Ladung −q sind in Ruhe. Die positiven Ladungen bewegen sich mit
′ = −~
v◦ nach links.
~v+
ℓ′
Wenn −q angezogen werden soll, dann müsste jetzt der Draht geladen sein, um eine Coulombkraft auszuüben. Die spezielle Relativitätstheorie besagt, dass einem Beobachter die
pLängsrichtung eines bewegten Massstabes verkürzt erscheint (= Längenkontraktion): l = l◦ 1 − v◦2 /c2 ,
wobei l◦ = wahre Länge (für einen zum Massstab ruhenden Beobachter) und c die Lichtgeschwindigkeit ist. Damit ändern sich auch die Ladungsdichten:
ρ= p
ρ◦
,
1 − v◦2 /c2
ρ′+ = p
ρ+
1 − v◦2 /c2
q
q
und ρ′− = ρ− 1 − v◦2 /c2 (= −ρ+ 1 − v◦2 /c2 )
Die positiven Ladungen rücken zusammen und die Elektronen auseinander. Damit erscheint der
Draht dem bewegten Beobachter als positiv geladen. Die Ladungsdichte ist:
ρ′ = ρ′+ − ρ′− = p
q
ρ+
v 2 /c2
2 /c2 = ρ p ◦
1
−
v
−
ρ
.
+
+
◦
1 − v◦2 /c2
1 − v◦2 /c2
Der Draht ist im bewegten System (positiv) geladen und zieht die Ladung −q mit der
Coulombkraft Gl. (6)
′
|F~C | =
q
A ρ+ v◦2 /c2
p
2π ǫ0 r 1 − v◦2 /c2
an. Da µ◦ ǫ◦ = 1/c2 erhält man ausser der Wurzel dasselbe Resultat wie oben. Auch die Wurzel
verschwindet, wenn man die Kraft richtig transformiert. Für v◦ ≪ c sind die beiden Gleichungen
gleich.
Die Lorentzkraft ist in diesem Gedankenexperiment ein Effekt der Relativbewegung in einem Inertialsystem. Magnetische Kräfte können somit durch eine Transformation auf elektrische
56
Lectures Bd I,13-6, Richard Feynman, Nobelpreis 1965, einer der ganz grossen theoretischen Physiker,
löste neben vielen theoretischen Problemen wie Feynman Graphen das Problem des flüssigen Heliums und
das der Sicherheitsschranken im Manhatten Project in Los Alamos “Surely You’re Joking Mr. Feynman”
56
Kräfte zurückgeführt werden. Die elektrischen und magnetischen Felder sind Komponenten eines Phänomens – der elektro-magnetischen Wechselwirkung – von verschiedenen Standpunkten
aus betrachtet (vgl. Physik III).
4.4
Permeable Medien
In bisherigen Beispielen berechneten wir mit Hilfe des Ampère’schen Gesetzes aus einem
~ oder B-Feld)
~
gegebenen Strom das Magnetfeld (Him Vakuum. Was geschieht, wenn wir
den Raum mit Materie ausfüllen? Ähnlich wie ein elektrisches Feld durch die Anwesenheit polarisierbarer Materie beeinflusst wird, so wird auch ein magnetisches Feld durch
Materie verändert. Im allgemeinen ist Materie magnetisch polarisierbar, man nennt sie
permeabel.
4.4.1
Erfahrungstatsachen
Wird ein stromdurchflossener Leiter in ein unendlich ausgedehntes, permeables Medium
gebracht, so ändert sich die ursprüngliche (d.h. die im Vakuum verhanden gewesene)
~ V ak. . In einem permeablen Medium ist
magnetische Induktion B
~ perm. = µ B
~ V ak. = µ µ0 H
~ .
B
~ erhält man gemäss Biotµ ist eine Materialgrösse, die Permeabilität des Mediums. H
Savart’schem Gesetz (Gleichung (44)) aus dem Strom I im Leiter:
Z
d~ℓ × (~r − ~rℓ )
~ = I
H
.
4π Leiter |~r − ~rℓ |3
Es gibt Materialen mit 0 < µ < 1. Solche Materialien nennt man diamagnetisch.
Beispiele sind Cu, Bi, He, Xe, Ne, H2 , N2 , H2 O, bei ihnen ist also das B-Feld im Medium
kleiner als dasjenige im Vakuum.
Wenn konst= µ > 1 ist, so nennt man das Material paramagnetisch. Beispiele
sind O2 , FeCl3 , CuSO4 , Al. Bei solchen Materialien ist das B-Feld im Medium grösser als
dasjenige im Vakuum.
Bei gewissen Materialien schliesslich ist ebenfalls µ > 1, aber µ ist eine nicht-eindeutige
Funktion des H-Feldes. Solche Materialien nennt man Ferromagnetika. Beispiele sind
Eisen, Nickel, Kobalt (vgl. Kap. 4.4.3).
4.4.2
Magnetisierung und magnetische Suszeptibilität
†
Die atomare Erklärung der Permeabilität ist analog zum Fall der Dielektrika, wobei hier
anstelle von Ladungen Kreisströme und anstelle von elektrischen magnetische Dipolmomente Gl.(48) auftreten. Molekulare Kreiströme werden von Elektronen erzeugt, die in den
Atomen um den positiven Kern “kreisen”. Ferner haben Elektronen einen “Spin”, einen
Eigendrehimpuls, den man sich als Drehung um die eigene Achse vorstellen kann; damit
haben sie als geladenen Teilchen auch ein magnetisches Dipolmoment57 . Wiederum haben
wir es mit einem winzigen Strom zu tun. Beide Arten von elementaren Strömen erzeugen
57
Diese klassische Vorstellung ist falsch, da ein “punktförmiges” sich drehendes Elektron keinen Kreisstrom darstellen kann; das magnetische Moment des Elektrons ist nur quantenmechanisch verständlich.
57
auf Grund unserer Betrachtungen im Kap. 4.2.1 ein magnetisches Moment m
~ m . Alle einzelnen Atome mit einer ungeraden Zahl von Elektronen, wie z.B. 11 Na oder 83 Bi, haben
damit ein permanentes magnetisches Dipolmoment. In einem Molekül oder Festkörper
kompensieren sich jedoch die magnetischen Momente der Valenzelektronen benachbarter
Atome. Dies sind, zusammen mit Atomen, die abgeschlossene Schalen und kein permanentes magnetisches Dipolmoment haben, die diamagnetischen Stoffe. Atome mit nicht
abgeschlossenen inneren Schalen, wie die Übergangselemente Cr–Ni, Pt oder die seltenen
Erden, behalten dagegen im Festkörper ihr permanentes magnetisches Dipolmoment. Dies
sind die paramagnetischen Materialien.
In beiden Materialien erzeugt ein äusseres Magnetfeld durch Induktion (siehe Kapitel 5.1) einen kleinen zuätzlichen Strom (Stromschleife), dessen Magnetfeld dem äusseren
Feld entgegengesetzt ist, was zu einer Abnahme des Feldes führt. Bei Diamagneten tritt
dieser Fall rein zu Tage. Bei Paramagneten dagegen geschieht folgendes: Ohne äusseres Magnetfeld ist die Verteilung der atomaren magnetischen Dipolmomente infolge der
P
Wärmebewegung der Atome völlig ungeordnet. Die Vektorsumme i m
~ mi der einzelnen
Momente verschwindet. Wird ein äusseres Feld angelegt, so übt es ein Drehmoment auf
die atomaren Momente aus (vgl. Kapitel 4.2.3), so dass diese ausgerichtet werden. Da
dem Ausrichten die thermische Bewegung entgegen wirkt, ist die Permeabilität paramagnetischer Stoffe temperaturabhängig. Bei ganz tiefen Temperaturen sieht man den
überlagerten diamagnetischen Effekt.58
Ob wir nun ein Material haben, dessen Moleküle permanente magnetische Dipolmomente haben, oder ein Material, in dem Kreisströme mit den dazugehörigen Dipolmomen~,
ten induziert werden, so entsteht in beiden Fällen eine makroskopische Magnetisierung M
die wir als die mittlere Vektorsumme der Dipolmomente pro Volumeneinheit definieren:
m. m
~ =nm
. . . .n
..
M
~m
A
Dabei ist n die Zahl der Dipolmomente pro Volumeneinheit. Da gemäss Gleichung (48)
~ in A/m gemessen, das heisst
m
~ m die Einheiten A·m2 hat, wird also die Magnetisierung M
~
in den gleichen Einheiten wie das H-Feld.
Damit wird deutlich, dass die Magnetisierung
das von den Molekularströmen erzeugte Magnetfeld (H-Feld) ist.
~ in einem permeablen Medium, so muss man, um die
Kennt man also das Magnetfeld H
~ zu erhalten, zum H-Feld
~
wirklich vorhandene magnetische Induktion B
die im Medium
~
erzeugte Magnetisierung M dazu addieren:
~ = µ0 · (H
~ +M
~).
B
(55)
~ kommt nur zustande, wenn durch eine Induktion
Eine resultierende Magnetisierung M
eines äusseren Feldes die Elementarmagnete ausgerichtet werden. Also liegt es nahe, eine
magnetische Suszeptibilität χm durch die Gleichung
~ = χm H
~
M
(56)
einzuführen59 . χm ist eine vom Material abhängige, dimensionslose Zahl60 .
58
Vorsicht: Diamagnetismus und Paramagnetismus sind quantenmechanische Phänomene, die wir hier
mit klassischer Mechanik nur unzulänglich erklären können.
59
~
~ = χe D.
Dieser Gleichung entspricht im elektrischen Falle die Gleichung P~ = χe ǫ0 E
ǫ
60
~
~
Bei Kristallen kann es allerdings vorkommen, dass M nicht mehr parallel zu H steht. χm ist dann
ein Tensor (dh. eine 3×3-Matrix).
58
Schliesslich verknüpfen wir die Gleichungen (55) und (56) und erhalten
~ = µ0 · (H
~ + χm H)
~ = µ0 · (1 + χm ) H
~ .
B
Setzt man die Permeabilität µ = 1 + χm , so erhält man
oben als Erfahrungstatsache hingestellt hatten.
4.4.3
~ = µ0 µ H
~ ,
B
was wir
Die magnetischen Substanzen
Diamagnetische Stoffe
diamagnetische
Stoffe
χm
H2 , gasförmig
-2.3 ·10−9
H2 , flüssig
-1.8 ·10−6
H2 O, gasförmig -0.98 ·10−9
H2 O, flüssig
-8 ·10−6
Benzol
-8 ·10−6
Wismut, fest
-168 ·10−6
Gold
-29 ·10−6
Kupfer
-10 ·10−6
Paramagnetische Stoffe
paramagnetische
Stoffe
χm
O2 , gasförmig
1.9 ·10−6
O2 , flüssig
3400 ·10−6
Luft
0.37 ·10−6
FeCl3 , fest
3758 ·10−6
CuSO4 , fest
388 ·10−6
Chrom
324 ·10−6
Aluminium
20 ·10−6
Zinn
2 ·10−6
Für diese ist µ < 1, das heisst χm < 0,
sie haben kein permanentes Dipolmoment.
Die induzierten Kreisströme erzeugen ei~
ne Magnetisierung, die dem äusseren HFeld entgegengesetzt steht. Dieser Effekt
tritt in allen Substanzen auf. Da er jedoch
schwach ist, wird er bei Para- und Ferromagneten überdeckt.
χm hängt nicht von der Temperatur ab.
Für diese ist µ > 1, also χm > 0. Diese Materialien haben ein permanentes magnetisches Dipolmoment. Die Suszeptibilität
nimmt mit der Temperatur ab χm ∝ T1 :
Mit den Boltzmann-Verteilungen für die Ein~ und m
~
stellung des Dipolmomentes m
~ ↑↑ B
~ ↑↓ B
ist die Magnetisierung
³
´
M = mm n3 emm B/kT − e−mm B/kT ≃ m2m 2nB
3kT
Ferromagnetische Stoffe Bei ihnen ist µ nicht mehr konstant. In sogenannten “magnetisch weichen” Stoffen ist µ eine Funktion des Magnetfeldes:
B = µ0 µ(H) H .
In magnetisch harten Stoffen (Permanentmagnete) kann die Magnetisierung unabhängig
von H sein, also auch ohne äusseres Magnetfeld existieren. Ferromagnete zeigen also
eine Ordnung, die durch eine sehr starke Wechselwirkung zwischen den permanenten
Dipolmomenten dieser Substanzen zustande kommt.
Das ferromagnetische Material ist nicht einheitlich magnetisiert, sonden besteht aus
Weiss’schen Domänen61 , in denen alle atomaren Dipolmomente vollkommen geordnet
61
P. Weiss, 1907. Die Strukturen der Weiss’schen Domänen können mit verschiedenen Methoden sichtbar gemacht werden:
Magnetpulver (Teilchen von 10−5 − 10−6 cm in Suspension) richtet sich im thermischen Gleichgewicht
auf der polierten und ausgeglühten Oberfläche aus.
Beim magnetooptischen Kerr-Effekt wird die Polarisationsrichtung des reflektierten Lichtes gedreht
und damit werden Weiss’sche Bezirke im Analysator sichtbar.
Der Faraday-Effekt dreht die Polarisationsrichtung bei Durchstrahlung im Magnetfeld [Kap.??].
59
~ . Die Magnetisiesind. Jeder dieser Bezirke hat eine wohldefinierte Magnetisierung M
rungsvektoren der einzelnen Domänen sind nicht notwendigerweise parallel, die gesamte
Magnetisierung der Probe kann also bei Abwesenheit eines äusseren Feldes Null sein. In
einem äusseren Feld wird die Magnetisierung dieser Bezirke geordnet. Beim Einschalten
eines äusseren Feldes wird sie sprunghaft ausgerichtet (mit Induktion Gl.(60) hörbarer
Barkhausen-Effekt). Beim Ausschalten des äusseren Magnetfeldes bleibt im allgemeinen
eine Restmagnetisierung MR (Remanenz) übrig. Erst durch Anlegen eines Gegenfeldes,
des sogenannten Koerzitivfeldes HC , kann die Magnetisierung zu Null gebracht werden.
Dieses Zurückbleiben der Magnetisierung gegenüber der Feldstärke nennt man Hysterese
(“Nachwirkung”). Bei grossem H wird Sättigung erreicht B ≈ µ◦ H.
Die Hysteresisschleife B = µµ◦ H kann mit einem Oszillographen gemessen werden:
B(H)
H
HC
M S(T)/MS(0)
1/χm
5⋅103
0
TC
T [K]
VH
R2
µ=µ(H) A
µοµΗ
Hysteresisschleife
1
H
R1
B≈µo H
"
Sattigung
N2
N 1 , l1
Remanenz
MR
Io sinωt
C
VV
horizontal Ablenkung
VH ∝ I(t) ∝ H(t) = I(t)N1 /l1
vertikal Ablenkung
R
dt
VV ∝ B(H) = dB
dt
integriert mit dem Kondensator C mit der Integrationszeit
τ = R2 C ≈ 1s.
ferromagnetische
Stoffe
µmax
Nickel
2500
Kobalt
200
Eisen
680
Permalloy
105
(78% Ni, 21.5%Fe)
Stoff
Fe
Co
Ni
Gd
MnAs
EuO
TC [◦ C]
770
1115
354
20
45
-196
Oberhalb der Curie-Temperatur TC verschwindet der Ferromagnetismus und geht in den
Paramagnetismus mit T ∝ 1/χm über.
4.4.4
~
Die Energie eines magnetische Dipols im B-Feld
Dia- und paramagnetische Stoffe können durch die auf sie ausgeübte Kraftwirkungen
in inhomogenen magnetischen Feldern unterschieden werden. Mit Gl. (32) hatte wir die
~ eines elektrischen Dipols im elektrischen Feld dargestellt.
potentielle Energie Wd = −~p · E
die entsprechende Formel für einen magnetischen Dipol m
~ m eines Elektrons im Atom
lautet
potentielle Energie eines
~
W m = −m
~m·B
magnetischen Dipols
Ein magnetisierter Stoff wird sich im Magnetfeld so orientieren, dass seine potentielle
Energie minimal wird.
Bei diamagnetischen Stoffen ohne ein permanentes sondern nur mit einem induziertes
~ das heisst Wm = mm B. Wm ist also minimal,
magnetisches Dipolmoment ist m
~ m ↑↓ B,
wenn B minimal ist. Das bedeutet, dass eine diamagnetische Kugel aus dem Feld herausgestossen wird. Diamagnetismus ist temperaturunabhängig.
Bei einer paramagnetischen Substanz ist mit einem permanenten magnetischen Dipol~ das heisst Wm = −mm B. Deshalb ist Wm minimal, wenn B maximal
moment m
~ m ↑↑ B,
ist. Eine paramagnetische Kugel wird also an den Ort grösster Feldstärke gezogen. Die
60
thermische Bewegung wirkt gegen die Paralleleinstellung des Dipolmomentes im B-Feld,
die Magnetisierung ist daher temperaturabhängig mit einem schwachen diamagnetischen
Effekt.
Aus demselben Grund richtet sich eine paramagnetische Nadel
diamagnetische Nadel
paramagnetische Nadel parallel zum Feld
aus, eine diamagnetische Nadel dagegen
senkrecht zum Feld.
4.4.5
Vergleich von Medien im elektrischen und magnetischen Feld
Dielektrische Medien
Permeable Medien
~ = ǫ◦ E
~ + P~
D
P~ : el. Dipolmoment/Vol
Polarisierung
~
P~ = χe ǫ◦ E
~ = ǫǫ◦ E
~
D
~ = µ◦ H
~ + µ◦ M
~
B
~ : mag. Dipolmoment/Vol
M
Magnetisierung
~ = χm H
~
M
~ = µµ◦ H
~
B
a) nichtpolare Moleküle
a) Diamagnetismus
~ induziert elektrischen Dipol
~ erzeugte atomaren Kreisstrom
E
H
j
+q + ~
6
p~ = q∆~ℓ
m
~ magnetischer Dipol
−q -j∆ℓ
m
~ m = iA
-i
b) polare Moleküle
b) Paramagnetismus
~ richtet atomare el. Dipole im Feld aus H
~ richtet atomare mag. Dipole im Feld aus
E
temperaturabhängig
temperaturabhängig
c) Ferroelektrika
c) Ferromagnetika
~
~
~ H
~ kein linearer Zusammenhang
D, E kein linearer Zusammenhang
B,
~D
~ = 1 ǫǫ◦ E 2
Energiedichte w = 12 E
2
~
Energie des Dipols im Feld W = −~pE
4.4.6
~B
~ = 1 µµ◦ H 2
w = 12 H
2
~
W = −m
~ mB
siehe Kap. 5.2.10
~ und H-Felder
~
Ban Grenzflächen
~
An Grenzflächen permeabler Medien gelten ähnliche Gesetze für das Verhalten von B~
und H-Feldern wie für elektrische Felder.
µ1
H 1t
µ2
H 2t
µ1
µ2
4.4.7
B 1n
B 2n
H
~ r =0.
Wenn keine Ströme fliessen, ist
C H · d~
Auf die gezeichnete Kurve angewandt ist (analog Kap. 2.7.2)
B1t
B2t
H1t = H2t , das heisst
=
. Aus
µ1
µ2
folgt
B1n = B2n , das heisst
Elektromagnete und Permanentmagnete
Elektromagnete
61
I
A
~ · dA
~=0
B
H1n µ1 = H2n µ2 .
I
Wir gehen schrittweise vor.
1. Eine Spule mit der Länge ℓ, dem Durchmesser D und der Windungszahl N befinde sich im Vakuum und werde zu einem Torus vom Radius r
geformt. Das Magnetfeld ist dabei nur im Innern der Spule eingeschlossen
verschieden von Null. Für D ≪ r gilt nach Gl.(49)
D
r
H=
I
N
I ; d.h.
ℓ
B = µ0
N
I.
ℓ
2. Wird die torusförmige Spule vollständig mit einem Kern aus weichem
Eisen gefüllt, so ist
H=
I
N
N
I ; B = µ µ0 I .
ℓ
ℓ
3. Wird der Luftspalt der Breite d aus dem Eisenkern herausgeschnitten,
so folgt nach dem Ampère’schen Gesetz mit der Näherung, dass Hi (das
Feld im Innern) über den ganzen Torus konstant ist (keine Streufelder):
~
Hi (ℓ − d) + H0 d ≈ N I . Da die Normalkomponente des B-Feldes
stetig
ist [Kap.4.4.6], gilt Bi = B0 , also
d
µ µ0 Hi = µ0 H0 , das heisst Hi =
H0
H0
. Eingesetzt ergibt dies:
(ℓ − d) + H0 d = N I .
µ
µ
Die Feldstärken im Luftspalt sind somit H0 =
µN I
ℓ + d(µ − 1)
und B0 =
µ µ0 N I
.
ℓ + d (µ − 1)
µ0 N
I.
d
Die äussere Spule trägt praktisch nur zum Feld im Luftspalt bei und verstärkt damit das
Feld ohne Eisenkern um den Faktor ℓ/d.
Permanentmagnete
Ist µ genügend gross, so dass dµ ≫ ℓ, so gilt näherungsweise B0 ≈
Da keine Ströme fliessen, ist
M
MR
H
I
C
~ · d~r = 0 . (57)
H
1. In einem geschlossenen Torus ist also Hi = 0 und
die Magnetisierung besteht nur aus der Remanenzmagnetisierung MR .
2. Hat der Torus einen Luftspalt der Grösse d, so folgt
aus Gl. (57)
(58)
Man beachte: Für d ≪ ℓ müssen Hi und H0 verschiedene Vorzeichen
haben. Andrerseits gilt an der Grenzfläche (Kap.4.4.6)
d
Hi
Hi (ℓ − d) + H0 d = 0 .
B0
H0
d
Bi
B0 = µ0 H0 = Bi = µ0 (Hi + Mi ) .
Zusammen mit Gl. (58) wird dann
µ0 (Hi + Mi (Hi )) = −µ0 Hi
62
ℓ−d
.
d
M
Also wird
Mi
α
Hi
H
ℓ
Mi
ℓ
Mi = − Hi und tan α = −
= ,
d
Hi
d
ℓ
und somit B0 = µ0 (Hi + Mi ) = −µ0 Hi ( − 1) .
d
Hi ist negativ, es wirkt also entmagnetisierend.
63
5
Elektrodynamik
In den vorhergehenden Kapiteln haben wir elektrische und magnetische Felder mehr oder
weniger getrennt behandelt. Insbesondere waren diese Felder zeitlich konstant. Dass jedoch
eine Verknüpfung beider Felder besteht, haben wir schon gesehen. Ein elektrischer Strom,
der seinerseits durch ein elektrisches Feld erzeugt wird, erzeugt ein magnetisches Feld. Es
erhebt sich sofort die Frage, ob die Umkehrung dieses Sachverhaltes auch gilt, das heisst,
ob ein Magnetfeld unter Umständen auch ein elektrisches Feld erzeugen kann. Diese Frage
wird in Kap. 5.1 und 5.2 behandelt.
Ferner werden wir uns in Kap. 5.3 fragen müssen, welche neuen Erscheinungen sich
ergeben, wenn elektrische und magnetische Felder zeitlich variabel sind.
Probleme dieser Art untersuchte zuerst Faraday62 (1831). Diese Untersuchungen wurden vollendet mit der Theorie des Elektromagnetismus durch Maxwell (1873), in welcher
magnetische und elektrische Felder miteinander verflochten sind. Die vollständigen Maxwell’schen Gleichungen werden im Kapitel 5.4 besprochen.
5.1
5.1.1
Das Faraday’sche Induktionsgesetz
Grundversuche
Wir diskutieren zwei Grundversuche.
1. Man betrachte eine rechteckige, geschlossene Leiterschleife der Fläche A = ℓ x, wobei ℓ die Länge einer beweglichen Seite sein soll. Befindet sich diese Schleife in einem
~
homogenen, zeitlich konstanten B-Feld,
das senkrecht zur Ebene der Schleife steht, und
~
wird die bewegliche Seite ℓ mit der Geschwindigkeit ~v (~v ⊥ B)
~ 6¤ ¡
B
R
verschoben, so erfährt eine Ladung q in diesem Leiterstück eine
¢¢
¢¢
¢¢̧¢ ¢ ¢ ~
v
Lorentzkraft tangential zur beweglichen Seite [vgl. Hall-Effekt
¢
ℓ ¢¢¢ ¢¢¢¢~¢
¢
¢
¢®F
Kap.4.2.6]:
¢ dℓ
- ¢®¢ ¢e¢
~ .
F~ = q (~v × B)
-x
◦
Ein auf diesem Leiter mitbewegter Beobachter schreibt die Ursache dieser Kraft, da für
ihn q in Ruhe ist, einem induzierten elektrischen Feld zu mit der Kraft
~ ind
F~ = q E
~ ind = ~v × B
~
und aus einem Vergleich E
(elementarer Generator).
~ ind längs der geschlossenen Schleife, wobei die
Bildet man nun das Linienintegral von E
~
Integrationsrichtung zusammen mit der B-Richtung
eine Rechtsschraube ergibt, so gilt
I
~ ind · d~ℓ = −
E
Z
ℓ
0
Eind dℓ = −Eind ℓ = −v ℓ B .
~ ind ist also ein nicht-konservatives Feld,
Das Linienintegral ist nicht mehr Null. Das Feld E
~
d.h. Eind 6= ∇Vind kann nicht durch den Gradienten eines skalaren Potentials dargestellt
werden.
62
Faraday (1791-1867) wurde in England als eines von 10 Kindern eines Schmids geboren. Er machte
eine Lehre als Buchbinder. Dabei las er jeweils die zu bindenden Bücher. Später bat er darum, als Gehilfe
im Labor für Elektrochemie bei Davy arbeiten zu können. 1833 wurde er Professor. In der Chemie
enteckte er das Benzol (1825) und Grundgesetze der Elektrochemie. Seine Verdienste in der Physik sind:
Faraday’sche Konstante, Induktionsgesetz, in der Optik die Faraday’sche Drehung der Polarisationsebene
von Licht, unipolarer Generator.
64
Das Produkt vℓ kann durch die Änderung der Fläche A = ℓx ausgedrückt werden.
dA
dx
=ℓ
=ℓv.
dt
dt
I
~ ind · d~ℓ = −v ℓ B = − dA B = − d (A B) = − dΦ .
Also wird
E
dt
dt
dt
Z
Z
~ A
~ der Feldfluss von B
~ durch die Fläche A.
Dabei ist die Grösse Φ = Bn dA = B·d
Es ist
A
A
~ konstant ist und senkrecht auf A steht, folgt Φ = A B.
Da in unserem Fall B
~ ind -Feld ein nicht-konservatives Feld ist, hält es wie das E-Feld
~
Obwohl das E
einen
H
~
~
Strom aufrecht und es hat das Linienintegral Eind · dℓ die Bedeutung einer elektromotorischen Kraft (EMK), die wir mit Vm,ind bezeichnen 63 . Es gilt
I
~ ind · d~ℓ = − dΦ .
(59)
E
dt
Die induzierte EMK ihrerseits erzeugt in der Leiterschleife (Widerstand R) einen Strom
R
1 dΦ
Vm,ind
=−
.
Iind = +
R
R dt
Vm,ind
.
=
Das Ergebnis von Gleichung (59) ist aus der Argumentation der Lorentzkraft abgeleitet,
das heisst es ist kein neues unabhängiges Gesetz. Es stellt sich nun die Frage, was passiert,
~ variiert wird? - Diese Frage
wenn die Fläche A konstant bleibt und das Magnetfeld B
wurde von Faraday untersucht und stellt unseren zweiten Grundversuch dar.
2. Bei der gleichen Anordnung wie oben wird nun die Leiterschleife festgehalten und
dafür das Magnetfeld zeitlich variiert, so dass eine Flussänderung in A auftritt. Dann
wird ebenfalls ein Strom induziert, für den man experimentell wieder das Resultat
1 dΦ
dΦ
dB
. findet, allerdings ist jetzt
=A
.
R dt
dt
dt
Dieses Ergebnis können wir nicht mit den gleichen Argumenten herleiten wie im ersten
Grundversuch! Es ist also ein neues Gesetz. Es war Faradays Entdeckung, dass die EMK
wieder durch die Flussänderung gegeben ist, egal ob der Fluss Φ über dA/dt oder dB/dt
geändert wird.
~ +~v × B);
~ es gibt keine spezielle Kraft
Allgemein ist die Kraft auf eine Ladung F~ = q (E
~
infolge der B-Änderung. Nach Faradays Beobachtung muss eine Beziehung zwischen dem
~
~
E-Feld
und der Änderung des B-Feldes
bestehen: ein zeitlich variables Magnetfeld erzeugt
~
ein elektrisches Feld. Dieses E-Feld
ist nicht-konservativ.
Iind = −
5.1.2
Das Induktionsgesetz
Gestützt auf weiteres Tatsachenmaterial lassen sich die aus den beiden Grundversuchen
→
~ r, t) ein beliebigefundenen Ergebnisse verallgemeinern. Ist B(~
Bn
→
B
ges Magnetfeld und wird eine geschlossene Kurve C betrach~
tet, welche die Fläche A umrandet, so ist der Fluss von B
A
→
dA
→
C
63
→
Eind
dr
durch A definiert als Feldfluss
.
Φ=
Z
A
Vm,ind hat zwar die Dimension eines skalaren Potentials, es ist aber keines!
65
Bn dA =
Z
A
~ · dA
~.
B
~ ind , resp. der induzierten EMK, und
Zwischen dem längs C induzierten elektrischen Feld E
der zeitlichen Änderung des Flusses besteht der quantitative Zusammenhang
Vm,ind
.
=
I
~ ind · d~r = − dΦ
E
dt
Faradaysches
Induktionsgesetz
(60)
Zu beachten ist, dass sich der Fluss auf ganz beliebige Art ändern kann: entweder durch
~ bei fester Kurve C, oder Form- und Lageänderung der Kurve
zeitliche Änderung von B
~
C bei konstantem B, oder beides zusammen. Ferner ist die Flussänderung unabhängig
von der speziellen Form der Fläche (bei vorgegebener Berandung C), da der Fluss eines
~
~ eine Funktion
B-Feldes
durch eine geschlossene Fläche auch dann verschwindet, wenn B
der Zeit ist.
Wird in die Kurve C ein geschlossener Leiter mit Widerstand R gelegt, so entsteht ein
→
→
Bn
Leiter
induzierter Strom Iind = −
B
→
Vm,ind
1 dΦ
=
.
R dt
R
dA
I ind
Der induzierte Strom hat eine Richtung, so dass das durch
ihn erzeugte, zusätzliche B-Feld die Änderung des Feld→
dr
Eind
flusses zu hemmen sucht. Dies ist die Lenz’sche Regel64 .
Sie folgt aus dem Gesetz der Erhaltung der Energie. Denn der induzierte Strom stellt
einen Energievorrat dar, der aus der mechanischen Energie gewonnen werden muss, die
zur Änderung von Φ notwendig ist.
Das Faraday’sche Induktionsgesetz lässt sich auch in differentieller Form schreiben
[vgl. Gl. (45)]. Dazu wendet man es auf eine rechteckige, geschlossene Kurve C mit den
→
~ zeitlich variable, so gilt
z
Seitenlängen dx und dy an. Ist B
→
R
y
x
xyz
→
Ex(y)
Bz →
Ey(x)
dy dx
→
Ey(x+dx)
(Ey (x + dx) − Ey (x)) dy + (Ex (y) − Ex (y + dy)) dx
→
Ex(y+dy)
=−
Und analog erhält man
zusammengefasst also
∂Bz
dx dy . Also gilt
∂t
∂Ez ∂Ey
∂Bx
−
=−
∂y
∂z
∂t
~
~ =∇
~ ×E
~ = − ∂B
rot E
∂t
und
∂Ey ∂Ex
∂Bz
−
=−
.
∂x
∂y
∂t
∂Ex ∂Ez
∂By
−
=−
,
∂z
∂x
∂t
Faraday’sches Gesetz
=3. Maxwell Gl.
(61)
Das induzierte Feld ist ein Wirbelfeld, es besitzt kein skalares Potential.
Die differentielle Form des Faraday’schen Induktions-Gesetzes stammt von Maxwell.
~
~
Sie besagt: “Zeitlich veränderliche B-Felder
erzeugen E-Felder”.
Umgekehrt kann man aus
der differentiellen Form des Faradayschen Gesetzes mittels des Satzes von Gauss [Gl. (24)]
wieder das Faradaysche Gesetz in Integralform herleiten, allerdings muss die Kurve C im
Raum fest sein. Also erhalten wir aus dem differentiellen Gesetz das Integralgesetz im Falle
nicht beweglicher Leiter. Anderseits konnten wir für bewegliche Leiter das Integralgesetz
aus der Lorentzkraft herleiten.
Somit haben wir folgende Situation: Das Faradaysche Gesetz in Integralform unter~
scheidet nicht, ob die Flussänderung durch bewegte Leiter, veränderliches B-Feld
oder
64
Lenz, 1834
66
beides zusammen hervorgerufen wird. Zur Erklärung des induzierten Feldes Eind brauchen wir jedoch entweder die Lorentz-Kraft Gl. (40)
~ ind = ~v × B
~
E
~
~ ind = ∇ × E
~ = − ∂B .
oder das differentielle Gesetz rot E
∂t
Betrachtet man hingegen das Faradaysche Induktionsgesetz in Integralform Gl. (60) als
das fundamentale Gesetz, können daraus die Beziehung für die Lorentzkraft und das
differentielle Faradaysche Gesetz hergeleitet werden.
Wir können zusammenfassend sagen: Die Kraft auf eine Ladung q ist immer durch
~ + ~v × B)
~
F~ = q (E
~ sowohl von elektrischen Ladungen als auch von veränderlichen Magnetgegeben, wobei E
feldern entsprechend dem Faraday’schen Gesetz Gl. (61) erzeugt werden kann.
Abschliessend sei bemerkt, dass das Faradaysche Induktionsgesetz in Integralform nur
angewandt werden darf, wenn das Material des Leiters gleich bleibt. Wenn der Weg, den
die Ströme nehmen, sich im Material bewegt, versagt das Integralgesetz.
5.2
Anwendungen des Induktionsgesetzes
5.2.1
Der elementare Motor
Diese “Maschine” ist die “Umkehrung” des Generators, infolge der Induktion bewegt sich
ein Leiter. Wir schliessen eine rechteckige Leiterschleife mit der Fläche A = ℓ x und dem
Widerstand R an eine Batterie mit der EMK Vm an. Die eine
~
B6
Seite ℓ ist beweglich. Ist B ein homogenes Magnetfeld, das senk¤¡
recht zur Leiteroberfläche A steht, so besagt die 2. Kirchhoffsche
¢¢
Vm ¢¢
Regel: Vm + Vm,ind = I R . Dabei ist
¢¢̧¢ ¢¢̧¢d~
ℓ
ℓ ¢¢¢ ¢¢¢¢¢-~
¢
dF
¢
dx
dx
dΦ
¢ R ¢®¢ ¢e¢
= −B ℓ
, also Vm − B ℓ
= I R . (62)
Vm,ind = −
dt
dt
dt
b
- x
Mit der Lorentz-Kraft Gl.(42) auf den beweglichen Leiter ℓ F =
Z
0
ℓ
dF =
Z
0
ℓ
IB dℓ = IℓB
d2 x
=I ℓB,
dt2
mit m der Masse des beweglichen Leiterstückes. I wird mit Gleichung (62) ersetzt:
ist die Bewegungsgleichung für die translatorische Bewegung m
1
dx
d2 x
(Vm − B ℓ
).
m 2 =ℓB
dt
R
dt
d2 x ℓ2 B 2 dx
Vm ℓ B
dv ℓ2 B 2
Vm ℓ B
+
·
=
,
resp.
+
v=
.
2
dt
R m dt
Rm
dt
Rm
Rm
Dies ist eine inhomogene Differentialgleichung für die Geschwindigkeit v = dx
des bewegdt
lichen Leiters ℓ. Mit der Anfangsbedingung v(t = 0) = 0 erhält man als Lösung
Daraus erhält man
[siehe Anhang C.1 Dgl. Nr.3, 4]
67
v(t) = v∞ (1 − e−t/τ ) ,
(63)
v(t)
wobei
v∞ =
Vm
Rm
und τ = 2 2 .
ℓB
ℓB
Beim stationären Gleiten mit der Geschwindigkeit v∞
t
ergibt sich aus Gleichung (62): I =
1
Vm
(Vm − B ℓ
)=0.
R
ℓB
Die EMK der Batterie wird durch die induzierte EMK gerade kompensiert. Gleitet die
Seite ℓ nicht reibungslos, so wird ebenfalls eine konstante Endgeschwindigkeit erreicht.
Der entsprechende Strom verschwindet jedoch nicht, da die Batterie mechanische Arbeit
leisten muss.
5.2.2
Wechselspannungsgeneratoren
Mit diesen Maschinen kann grosstechnisch elektrische Energie aus mechanischer Energie
erzeugt werden. Das Prinzip besteht darin, dass ein Leiter in einem Magnetfeld bewegt
wird. Eine flache Spule mit N Windungen der Fläche A werde um eine Achse senkrecht
zu einem homogenen Magentfeld mit konstanter Winkelgeschwindigkeit ω gedreht.
Der magnetische Feldfluss ist Φ = Bn A N = B cos φ A N ,
Vm, ind
wobei φ = ω t also Φ = B A N cos ωt . Dann wird
B
Vm,ind = −
n
dΦ
= B A N ω sin ωt = V◦ sin ωt .
dt
Es wird eine Wechselspannung induziert.
Beispiel: Velodynamo, Lichtmaschine, Generator.
5.2.3
Das Betatron
†
Das Betatron ist ein Elektronenbeschleuniger, mit dem Elektronen auf eine kinetische
Energie von bis zu 300 MeV beschleunigt werden können. Es wird in der Medizin und
der Materialuntersuchung zur Erzeugung von harten Röntgenstrahlen (Sie entstehen beim
Abbremsen der Elektronen in einem Stück Materie) sowie in der Kernphysik angewendet.
Ein zeitlich veränderliches B-Feld Bz (r, t) erzeugt ein beschleunigendes Eind -Feld Eϕ .
Mit dem Fluss Φ = B̄πρ2 ist
z
E
B( )
e-
Eind = Eϕ =
B= dB
dt
Vm,ind
1 dΦ
1
ρ dB̄
dB̄
=−
=−
πρ2
=−
.
2πρ
2πρ dt
2πρ
dt
2 dt
Die Elektronen werden in einem B-Feld auf einer Bahn mit
konstantem Radius ρ gehalten.
Das über die Kreisfläche
1 Rρ
gemittelte Feld ist: B̄ = πρ2 0 Bz (r, t)2πr2 dr.
r
v
dp
ρ dB̄
= −e Eϕ = e
. (64)
dt
2 dt
Diese Gleichung ist auch relativistisch korrekt. Für die Kreisbahn bei ρ=konst und B(ρ)
Die Bewegungsgleichung für ein Elektron ist:
mit
p = mv
ist
evB(ρ) =
68
F =
m 2
v ⇒
ρ
dp
dB(ρ)
= eρ
dt
dt
(65)
Magnet
Gl. (64) und (65) ergeben die
B
Wideröe’sche65 Betatron-Bedingung: B(ρ) =
1
B̄
2
Das Führungsfeld B(ρ) muss während der Beschleunigung, bei der ρ konstant bleibt, immer halb so
gross sein wie das über die Kreisfläche gemittelMagnet
te Feld B̄. Die maximale Energie ist mit
p =
eρBmax (ρ)
Bmax (ρ) dem maximalen Führungsfeld66 :
Röhre
und
Etot =
q
mc2 + p2 c2 = Ekin + mc2
⇒
Ekin =
q
mc2 + (c e ρ Bmax (R))2 − mc2 ,
z.B. für Elektronen ist: mc2 = 511 keV, ρ = 1 m, Bmax (ρ) = 1 T → Ekin = 300 MeV.
Ein wirklich funktionierendes Betatron muss noch einige weitere Bedingungen erfüllen67 .
1. Eine azimutale Fokussierung, damit die beschleunigten
Teilchen nicht auf einer Schraubenbahn sofort in die Poluh
z
Br ( , z)
Polsch
schuhe laufen, wird durch eine Abnahme des Bz (r)-Feldes
FL
Bz (r,t)
Bz ( )
mit dem Radius r erreicht. Eine kleine horizontale KomSollbahn
ponente Br (ρ, ∆z) ausserhalb z = 0 führt dann zu einer
Br ( ,- z)
Polsch
z-Komponente der Lorentz-Kraft und damit zu einer aziuh
Bz ( )
mutalen Fokussierung.
2. Eine radiale Fokussierung wird erreicht, indem das B-Feld
F(r)
Zentrifugalkraft
schwächer mit r abfällt als die Zentrifugalkraft.
"
rucktreibende
Kraft
3. Im Betatron werden i.a. nur Elektronen beschleunigt, da
Lorenzkraft
diese wegen der kleinen Masse hohe Geschwindigkeiten besitB
zen. Wegen der Energieverluste durch Synchrotronstahlung
Sollkreis ρ
r
ist jedoch die maximale Energie auf ca 300 MeV begrenzt.
Deshalb sind heute fast alle Betatrons von Linearbeschleunigern abgelöst worden.
5.2.4
Die Unipolarmaschine
Eine dicker Metallzylinder rotiert um seine Symmetrieachse, parallel zur
~
Achse liegt ein B-Feld.
Auf eine freies Elektron, das im Abstand r von
der Drehachse in der Metallscheibe mitbewegt wird, wirkt, da q < 0, eine
~ = q ω r B . Die
nach aussen gerichtete Lorentzkraft |F~ | = q |~v × B|
~ ind , also die Kraft auf die positive Einheitsladung,
zugehörige Feldstärke E
~ ind = −ω r B ~r .
ist dann nach innen gerichtet und hat den Wert E
r
Die resultierende EMK wird dann
Vm,ind =
65
Z
0
ρ
~ d~r = −ω B
E
Z
0
ρ
Vm,ind
+
-
B
1
~r d~r = − ω B ρ2 ,
2
Rolf Wideröe 11.7.1902 Christiania (N) - 1996 Nussbaumen (CH) entwickelte 1924 das Betatronkonzept, erster Bau einer Elektronenschleuder 1940. Er hatte viele Patente.
66
Dies ist die relativistische Energie-Impulsbeziehung mit m der Ruhmasse des Teilchens (Phys III).
67
Im Betatron kann nur ein Elektronenpaket bis zur maximalen Energie beschleunigt werden. Zum
nächsten Beschleunigungszyklus wird das B-Feld heruntergefahren. Typische Daten: 50 Hz Wiederholfrequenz, 30 eV/Umlauf, Etot = 30 MeV, I¯ = 10−7 A.
69
also eine negative Gleichspannung. Der negative Pol der Maschine ist die
Zylinderoberfläche. Da man den Zylinder vor einem Pol eines Stabmagneten rotieren lassen kann, wurde der Name “Unipolarmaschine” geprägt, sie
wurde 1831 von Faraday als erster Gleichspannungsgenerator gebaut.
F
r
B
r
Die Unipolarmaschine ist ein Beispiel, in dem die Integralform des Faradayschen Gesetzes
versagt. Zwischen Achse und Zylinderoberfläche wird eine EMK induziert, obwohl der
Stromkreis räumlich konstant bleibt; aber die Ladungsträger der Metallscheibe bewegen
~
sich im B-Feld.
Die erzeugte Spannung ist gering und damit schwierig zu messen.
5.2.5
Widerstandsdämpfung beim Galvanometer
†
Mit einem Galvanometer werden Ströme und Spannungen gemessen. Eine flache Spule mit
N Windungen der Fläche A = a2 wird an einem dünnen Faden so aufgehängt, dass sie
Torsionsschwingungen ausführen kann. Dabei bewegen sich die senkrechten Seitenteile der
Spule in einem schmalen Luftspalt, in welchem ein radial gerichtetes Magnetfeld herrscht.
Dieses übt auf den mit I durchflossenen Leiter eine
Lorentzkraft aus, die zu einer Drehung der Spule um
Skala
α◦ = IN a2 B/k proportional zum Strom I führt68 . Die
dabei auftretende Drehschwingung um die neue Ruhelage α◦ wird durch den bei der Drehung induzierten Strom
I
Iind , auf den eine Lorentzkraft F wirkt, gedämpft. Iind
F
B
fliesst durch die Spule und den äusseren Widerstand R.
Es ist
mit Gl. (42) F = |Iind | N a B .
Das rücktreibende Drehmoment der Aufhängung sei
−kα. Dann lautet die Bewegungsgleichung der Spule
R
I◦
d2 α
= −kα − F a cos α ,
dt2
I◦ =Trägheitsmoment um die Aufhängung.
1 dφ
1 d
AN B
dα
Mit dem Induktionsgesetz ist Iind = −
=−
(AN B sin α) = −
cos α
.
R dt
R dt
R
dt
Für kleine Auslenkungen, d.h. |α| ≪ 1, lautet dann die Bewegungsgleichung
I◦
α(τ)
αο
t
d2 α N 2 A2 B 2 dα
+
+k α=0.
dt2
R
dt
Mit der Lösung für schwache Dämpfung [Anhang C.1
Dgl. 3] α(t) = A e−λt cos(ωt − δ) mit
N 2 A2 B 2
und ω =
λ=
2 I◦ R
s
k
N 2 A2 B 2 2
) .
−(
I◦
2 I◦ R
Die Dämpfungskonstante λ kann mit dem äusseren Widerstand R reguliert werden, i.a.
wird eine kritische Dämpfung gewählt (vgl. Versuch Phys AI). Für grosse Werte von
68
F = 2N IaB, Drehmoment M = F a/2 = kα◦ im Gleichgewicht mit dem rückstellenden Drehmoment
kα◦
70
R ist die Dämpfung sehr schwach. ω =
Galvanometers.
5.2.6
q
k
I◦
ist die Kreisfrequenz des ungedämpften
Magnetfeldmessung mit einer Flipspule
Eine flache Spule mit N Windungen der Fläche A in
~ ◦ ⊥ A wird in der Zeit τ aus dem
einem Magnetfeld B
Magnetfeld herausgezogen. Der induzierte Strom ist
Bo
G
B=0
R
Vm,ind
1 dΦ
= Iind = −
,
R
R dt
mit Φ = N A Bn .
Wird mit einem Oszillographen oder einem ballistischen Galvanometer der Strom Iind
vom Anfang bis zum Ende des Herausziehens aufintegriert, so gilt
Z
τ
0
Iind = −
1
1
NA
NA
1 Z τ dΦ
= − (Φ(τ ) − Φ(0)) = − (0 − N A Bn ) =
Bn =
B.
R 0 dt
R
R
R
R
und es kann das Magnetfeld B gemessen werden. Statt die Spule aus dem Magnetfeld
herauszuziehen, kann sie auch um z.B. 90◦ gedreht werden.
5.2.7
Wirbelströme
Wirbelströme treten in massiven Leitern infolge der Induktion auf. Wird eine Metallscheibe in einem homogenen Magnetfeld translatorisch bewegt, so ist der Fluss durch eine
beliebige Leiterfläche konstant. Es treten somit keine Induktionsströme auf. Ist jedoch
das Feld inhomogen, so sind die Lorentzkräfte auf die Elektronen unterschiedlich gross,
so dass sich ein geschlossener Strom und damit ein induziertes magnetisches Feld bilden
kann. Stärke und Geometrie dieser Wirbelströme hängen empfindlich von der Form des
Metalles ab. Nach der Lenz’schen Regel hemmen die
B
Ströme die erzeugende Bewegung. Die Bremsung ist
v
sehr stark in Leitern wie Al, Ag, Cu mit einer hohen
C
A
Leitfähigkeit [vgl. Kap. 5.2.5]. Ein Supraleiter mit
FCD
FAB
R ≡ 0 schwebt in einem inhomogenen Magnetfeld
I
B
(Meissner-Ochsenfeld-Effekt), das äussere Feld wird
v
B
D
vollständig im Innern des Leiters durch das induFAB > FCD
zierte Feld kompensiert.
Werden in der Metallscheibe Schlitze angebracht, so werden zwischen den Schlitzen nur
kleinere Ströme induziert69 , und die Bremsung wird geringer. In der Technik wird die
bremsende Wirkung in der Wirbelstrombremse ausgenutzt.
5.2.8
Gegenseitige Induktion zweier Leiter
Betrachtet man zwei Leiterkreise 1h und 2h, wobei in 2h mit Hilfe einer EMK ein
~ 2 (t) erzeugt, so gilt
zeitabhängiger Strom I2 (t) aufrecht erhalten wird, der ein Feld B
Z
d~ℓ2 × ~r
~ 2 (t) = µ µ◦ I2 (t)
= f~ I2 (t) .
nach dem Biot-Savartschen Gesetz B
4π
r3
Leiter (2)
69
Um z.B. bei einem Transformator (vgl. Kap.5.3.5) Wirbelströme und damit Verluste zu minimalisieren, werden Trafobleche (lamelliertes Eisen) oder bei Hochfrequenz Ferritkerne benutzt.
71
EMK
~
d
Alle nur von der geometrischen Anordnung abhängigen Grössen stecken im konstanten axialen Vektor f~.
~ 2 durch eine von Leiter 1hberandete
Der Fluss von B
Fläche A1 ist
A1
B2(t)
r
2
I2(t)
Φ(t) =
1
2
Z
A1
B2,n dA = I2 (t)
Z
A1
fn dA = I2 (t) · L12 .
µ µ◦ Z Z
d~ℓ2 × ~r ~
dA .
4π A1 Leiter (2) r3
A1
Den Geometriefaktor L12 nennt man den Koeffizienten der gegenseitigen Induktion. Wird
der Strom I2 variiert, so ändert sich der Fluss Φ mit der Zeit und in 1hwird eine EMK
induziert, die nach dem Induktionsgesetz den Wert hat
Dabei wurde gesetzt
Vm,ind 1h= −
Z
fn dA = L12 =
dI2 Z
fn dA oder
dt A1
Vm,ind 1h= −L12
dI2
.
dt
Analog erhält man, wenn die Rollen von 1h und 2h vertauscht werden, auch in 2h eine
induzierte EMK, wenn sich der Strom in 1händert.
Vm,ind 2h= −L21
dI1
.
dt
Dabei ist L21 = L12 , da in den Ausdrücken für L12 und L21 die beiden Leiterkreise
vollkommen symmetrisch vorkommen.
Die Einheit von L12 ist
5.2.9
1
Volt Sekunde
= 1 Henry = 1 H .
Ampère
Selbstinduktion
Ein Strom I kann natürlich im eigenen Kreis eine EMK induzieren, weil sein Magnetfeld
den eigenen Kreis durchsetzt. Fliesst in einem geschlossenen Leiterkreis ein zeitlich
variabler Strom I(t), so ist dessen Magnetfeld
I(t)
B(t)
Z
µ µ◦
d~ℓ × ~r
~
B(t)
=
I(t)
.
4π
r3
Leiter
Der Fluss durch eine Fläche A, die vom Leiter selbst umrandet
wird, beträgt
Φ=
Z
Z
µ µ◦
~
~
B · dA = LI(t) , L =
I(t)
4π
Z
A Leiter
d~ℓ × ~r ~
dA
r3
Der Geometriefaktor L heisst Koeffizient der Selbstinduktion. Die vom Strom induzierte
EMK ist dann
Vm,ind = −L
dI
.
dt
Die Einheit von L ist ebenfalls 1 Henry.
(66)
q ∼∼∼∼q
∼
Die induzierte EMK
Ihr Symbol bei elektrischen Schaltungen ist:
L
wirkt der Stromänderung entgegen (Lenz’sche Regel), da beim Einschalten ein Magnetfeld
aufgebaut wird.
72
Als Beispiel berechnen wir die Selbstinduktion einer langen Spule mit N Windungen
der Fläche A und der Länge ℓ (oder eine entsprechende Toroidspule), die sich in einem
Material der Permeabilität µ befindet. Im Innern der Spule ist [vgl. Gl. (49)]
N
I . Nach dem Induktionsgesetz ist
B = µ µ◦ H = µ µ◦
ℓ
dI
dΦ
dB
µ µ◦ A N 2
A N 2 dI
Vm,ind = −L
=−
= −A N
= −µ µ◦
, also L =
. (67)
dt
dt
dt
ℓ dt
ℓ
5.2.10
Energiedichte des magnetischen Feldes
Analog zum elektrischen Feld besitzt auch das Magnetfeld Energie. Mit dem Induktionsgesetz wird die Energiedichte des magnetischen Feldes für einen Spezialfall berechnet.
Zunächst betrachten wir einen allgemeinen Leiterkreis, in welchem der Strom im
Zeitintervall dt von I auf I + dI erhöht wird.
I 6
¡ 6
dI
¡
?
dI
Dabei wird eine EMK
Vm,ind = −L
dt
induziert, gegen die von aussen eine zusätzliche Arbeit
dW = −Vm,ind I dt = L I dI
- dt ¾
geleistet werden muss. Um den gleichen Betrag nimmt die Energie Wm des Magnetfeldes
zu: dWm = dW = L I dI . Die Integration ergibt mit I(t = 0) = 0
-t
W
Zm
dWm =
ZI
LI dI =
Wm =
0
0
1
L I2 .
2
die Energie des
magnetischen Feldes
Um die Energiedichte zu bestimmen, wählen wir eine lange Spule oder einen Toroiden,
2
ist dann
mit Gl. (49) B = µ µ◦ Nℓ I , und Gl. (67) L = µ µ◦ ℓA N
µ µ◦ N 2 2 1 B 2
1 ~ ~
Wm
=
I =
= H
·B.
2
Aℓ
2ℓ
2 µ µ◦
2
Wie für das elektrische Feld lässt sich zeigen, dass dieses Ergebnis allgemein gültig ist.
die Energiedichte der Spule wm =
Somit gilt
wm =
1 ~ ~
H ·B
2
die Energiedichte des
magnetischen Feldes
formal analog zum elektrischen Fall. Dort war wel =
Kondensator.
5.2.11
1
2
~ · E,
~ bzw. Wel =
D
1
2
C V 2 für den
Analogie der Selbstinduktion zur Masse der Mechanik
F
v
x
mv
1
mv 2
2
m
Mechanik
Kraft
Geschwindigkeit
Ortsänderung
Impuls
kinetische Energie
träge Masse
dv
F =m
dt
−Vm,ind
I
q
LI
1
LI 2
2
L
Magnetismus
induzierte Spannung
Strom
Ladung
magnetische Feldenergie
Trägheit des Magnetfeldes
dI
−Vm,ind = L
dt
Beachte: Gleiche mathematische Gleichungen haben die gleichen Lösungen.
73
5.3
Quasistationäre Ströme
Es werden Stromkreise betrachtet, die Widerstände (R), Spulen (L) und Kondensatoren (C), sowie elektromotorische Kräfte70 enthalten. Die Ströme sollen sich so langsam
verändern, dass keine Energie durch Strahlung verloren geht.71
Die Spannungsabfälle, bzw. elektromotorischen Kräfte über die drei Schaltelemente
sind mit ihren Schaltbildern gegeben durch
VR = I R
Q
C
dI
= −L
dt
VC =
Vm,ind
am Widerstand R
R
am Kondensator C
C
von der Selbstinduktion L.
q ∼∼∼∼q
∼
L
Z t
dQ
, resp. Q(t) =
I(t) dt + Q(t = 0) .
Ferner ist für Umrechnungen I =
dt
0
Betrachten wir einen einfachen Stromkreis, so gilt nach der 2. Kirchhoffschen Regel
X
X
Q
dI
q ∼∼∼q
∼
=RI+
V
=
Vi d.h. Vm − L
m,ind
²¯ L
dt
C
Vm
C
±°
dI
Q
oder auch Vm = L
+RI + .
R
dt
C
d2 Q
dQ Q
+R
+ = Vm (t)
(68)
2
dt
dt
C
d2 I
I
dVm (t)
dI
=
I
und
differenzieren
für
I:
L
+ =
.
(69)
+R
oder dQ
dt
2
dt
dt C
dt
Die Lösungen siehe im Anhang C.1 Dgl. 7. und 8. Verglichen mit der Mechanik stellt der
Term dVdtm eine Anregung dar, CI eine Rückstellkraft und R dI
eine Dämpfung.
dt
Mit Vm =konst. und damit dVdtm = 0 beschreibt Gl. (69) eine gedämpfte Schwingung, die
Energie pendelt zwischen Wm und We mit der Ohm’schen Dämpfung (Joule’sche Wärme)
I 2 R [vgl. Gl. (71)]. Mit Vm = V◦ cos ωt existiert eine erzwungene Schwingung [siehe S. 80].
Setzen wir I =
5.3.1
dQ
dt
ein, so erhalten wir für Q: L
Stromkreise mit konstanter EMK
Sonderfälle ergeben sich, wenn entweder die Kapazitäten C oder die Selbstinduktion L so
klein sind, dass eine gegenüber der anderen vernachlässigt werden kann.
1) L = 0, C 6= 0
Gleichung (68) reduziert sich auf R
mit der Lösung [Anhang C.1 Dgl. 4.]
70
dQ Q
+ = Vm , Vm ist konstant
dt
C
(70)
Q(t) = Q◦ e−t/(RC) + Vm C .
z.B. Batterien, Gleichstrom- oder Wechselstromgeneratoren
Wir werden später [Kap. 5.4.1] sehen, dass nicht nur (gemäss Induktionsgesetz) veränderliche Magnetfelder elektrische Felder erzeugen, sondern dass auch umgekehrt veränderliche elektrische Felder Magnetfelder hervorrufen können. Diese veränderlichen Felder können sich im Raum ausbreiten, das betreffende
System sendet “elektromagnetische Wellen” aus. Die Abstrahlung hängt jedoch stark von der Frequenz
der Wechselfelder ab. Bei Frequenzen bis etwa 1000 Hertz ist der Energieverlust infolge Strahlung vernachlässigbar. Wir beschränken uns deshalb hier auf solche “langsam veränderliche” Felder und Ströme.
71
74
Wir untersuchen zwei verschiedene Anfangsbedingungen.
q
q
R - S@
q S′
I
q
Vm VC C R
q
a)Aufladen eines Kondensators: Zur Zeit t = 0 sei der Kondensator ungeladen (d.h. Q(t = 0) = 0) und der Schalter bei S werde
geschlossen: Der Kondensator C wird aufgeladen. Es ist
Q(t = 0) = Q◦ + Vm C = 0 =⇒ Q◦ = −Vm C .
Vc
Vm
Somit wächst die Ladung gemäss
Q(t) = Vm C (1 − e−t/(RC) ) .
τc
Daraus erhalten wir
t
Vm I
R
und I(t) =
1Vm
e R
VC (t) =
Q
= Vm (1 − e−t/(RC) )
C
Vm −t/(RC)
dQ
=
e
.
dt
R
Man nennt τC = RC die Zeitkonstante (e-tel Wertszeit)
dieses RC-Kreises. Nach einer Zeit t ≫ τC ist der Kondenτc
t
sator aufgeladen und trägt die Ladung Vm C.
b) Entladen eines Kondensators: Der Schalter S′ werde zur Zeit t = 0 geschlossen.
Es ist Vm = 0 und
VC
RC - Signal
V o V c (t)
Q(t = 0) = Q◦ = C Vm .
Die Lösung ist Q(t) = Q◦ e−t/(RC) .
I(t) τ τ c
c
t
t
Q◦ −t/(RC)
Damit ist VC (t) =
e
= V◦ e−t/(RC)
C
b
R C
b
b
Rgross
dQ
Q◦ −t/(RC) V◦ −t/(RC)
=−
e
=
e
.
dt
RC
R
In der Signaltechnik spielt das RC-Glied eine wichtige Rolle.
I(t) =
-V o
R
b
t
Bei Kippschwingungen z.B. tritt kombiniert Laden und Entladen auf:
Q
q q
Wird ein Kondensator mit parallel geschalteter GasentladungsR
º·
¤ ¡ strecke (Glimmlampe) über einen Widerstand aufgeladen, so zündet
C
qr
die Glimmlampe für VC = VZ und sie löscht bei VC = VL . LadungsVm
¹¸
und Entladungsphasen lösen sich periodisch ab.
Der Kondensator wird mit der grossen ZeitkonstanVc
ten τC = RC aufgeladen und mit einer viel kleineren
VZ
Zeitkonstanten entladen, weil der innere Widerstand
der Glimmlampe viel kleiner als R ist. Ist VZ ≪ Vm ,
VL
t
erhält man ungefähr eine Sägezahnschwingung.
2) keine Kapazität, d.h. VC = 0 = Q
C
dI
+ R I = Vm .
dt
Diese Differentialgleichung hat dieselbe Form wie Gl. (70) mit der Lösung
Die 2. Kirchhoffsche Regel ergibt nach Gleichung (68) L
I(t) = I◦ e−(R/L)t + Vm /R
mit R = RΩ + RL ,
75
(RL Widerstand der Spule).
Sq
»q RΩ
q S′
Vm
Wir betrachten wieder die Ein- und Ausschaltvorgänge:
a)Einschalten: Zur Zeit t = 0 sei I(t = 0) = 0 und der Schalter
6
werde geschlossen (Position S). Dann ist
RL
q
≀ VL
Vm
Vm
L ≀≀
= 0 =⇒ I◦ = −
.
I(t = 0) = I◦ +
q ?
R
R
I
Vm
R
Vm
(1 − e−(R/L)t ) .
R
Somit ist I(t) =
τL
Die Zeitkonstante dieses Vorganges ist τL = L/R .
Der Spannungsabfall an der Spule ist dann
t
VL = Vm − I RΩ = Vm (1 −
Vm
VL
RΩ RΩ −t/τL
+
e
).
R
R
Aus R = RΩ + RL folgt
1−
R
Vm L
R
RL
RΩ
RL
RΩ
=
,
=1−
.
R
R
R
R
Also wird VL = Vm (
τL
RL
RL −t/τL
+ (1 −
)e
).
R
R
t
Ausschalten: Der Schalter werde bei t = 0 nach S′ geschlossen. Nun ist I(t = 0) = Vm /R
(d.h. der vorher fliessende stationäre Strom) und Vm = 0 für t > 0. Also ist
I(t) =
Vm −t/τL
e
R
und VL (t) = −RΩ I = −Vm
+V mR L
R
Vm I
R
RΩ −t/τL
e
.
R
Vm
VL
t
L
Vm
10⋅L
t=0
t
-V mR Ω
R
Ist L und damit
τL gross (Spule
t=0
mit Eisenkern), dann fällt beim Ausschalten die hohe Spannung −Vm RRΩ nur langsam ab
und die in der Spule gespeicherte magnetische Feldenergie entlädt sich teilweise mit einem
Abreissfunken oder eine Lampe über dem Schalter leuchtet auf.
5.3.2
Die konventionelle Spulenzündung beim Auto
†
Bei der konventionellen Zündung des Ottomotors wird der starke Abreissfunke beim Öffnen des Unterbrecherkontaktes des Stromkreises Batterie und Zündspule zur Zündung der
Zündkerze ausgenutzt.
Durch den Strom I1 der Batterie mit VB = 12 V wird in der Primärwicklung der
Zündspule Zs eine Energie W = 12 L1 I12 (L1 ≈ mH, R1 ≈ Ω) gespeichert.
76
qP qq
Beim Öffnen des Zündunterbrecherkontaktes U steigt die
Spannung an der Primärspule und um ca 100fach übersetzt
≀ ≀ 100 C q q U
Start 1
≀
≀
der Sekundärspule und damit an der Zündkerze auf über 1000
B
+
≀q ≀q Zs
q
VB
q
V bis zur Zündung an und sinkt dann auf die Brennspannung
−
Zk
von 400 V ab. Der Zündkondensator C unterdrückt zu starke
Funkenbildung am Unterbrecherkontakt und lädt sich beim
Öffnen des Zündunterbrecherkontaktes auf. Bricht der Funke wieder ab, dann schwingt
die restliche Energie in dem Sekundärkreis der Zündspule über seinen Ohm’schen Widerstand aus. Der Vorwiderstand RV wird nur beim Start zur Anhebung der Startspannung
kurzgeschlossen. Im nicht gezeichneten Zündverteiler wird die Zündung auf die einzelnen
Zylinder umgeschaltet.
Weitere praktische Anwendungen der Induktion sind z.B. die Induktionskochplatte
oder die Induktionslampe, die eine beträchtliche Energie im Haushalt einsparen können.
q q
RV
5.3.3
Der Thomsonsche Schwingkreis
a) Freie Schwingungen eines LC-Kreises (Thomsonscher Schwingkreis)
Beim Thomsonschen Schwingkreis sind L 6= 0, C 6= 0, Vm = 0. Damit überhaupt ein
Strom fliesst, muss z. B. der Kondensator zur Zeit t = 0 aufgeladen sein: QC (t = 0) = Q◦ .
q ∼∼∼q
∼
Der Strom in diesem Kreis wird durch Gl. (69) mit Vm = 0 bestimmt:
L
R
C
dI
I
d2 I
+ =0.
(71)
L 2 +R
dt
dt C
Formal ist diese Differentialgleichung [Anhang C.1 Dgl. 7.] identisch mit der Bewegungsgleichung für den linearen gedämpften Oszillator der Mechanik und Gl. (71) hat auch
I
die gleiche Lösung I(t) = I◦ e−t/τ cos(ω ′ t + δ)
t
′
mit ω =
2π
ω
R
We
C
L
R
Wm
I o(ω )
I o(ω o)
ω◦2 −
1
,
τ2
1
R
=
τ
2L
und
ω◦2 =
1
LC
der Thomson-Formel . ω◦ ist die Kreisfrequenz der ungedämpften
Schwingung, welche bei verschwindendem Widerstand R auftritt.
1/τ bestimmt den Grad der Dämpfung. Die Schwingung besteht
aus einem Hin- und Her-Pendeln der elektrischen Energie im Kondensator We und der magnetischen Energie in der Spule Wm . Durch
die im Widerstand R entstehende Joule’sche Wärme I 2 R wird der
Schwingung ständig Energie entzogen, bis sie schliesslich ausstirbt.
ω◦2 = τ12 ist der kritische Grenzfall und τ12 > ω 2 der exponentielle
Kriechfall. Der Gütefaktor dieses Schwingkreises ist
kleines Q
grosses Q
ωo
s
ω
τ ω◦
1
[vgl. Mechanik Kap. 7.3] Q =
=
2
R
s
L
.
C
In einem supraleitenden Schwingkreis wäre R → 0
und damit Q → ∞.
77
b) Erzeugung ungedämpfter Schwingungen
Um die Schwingung aufrecht zu erhalten, muss in jeder Schwingungsperiode die in Wärme
umgewandelte Energie wieder ersetzt werden, z.B. durch Elemente mit “negativem” Widerstand oder durch eine Rückkopplung.
a) Durch Elemente mit “negativem” Widerstand
Beispiele solcher Elemente: Lichtbogen, Dynatron, Tunneldiode (vgl. S.39).
VB
Ein Lichtbogen entsteht, wenn an zwei Kohleelektro6
Q
stat.
Kennlinie
den eine Gleichspannung angelegt wird. Der Strom
Q
Q
Q
kommt hauptsächlich durch Elektronenemissionen
dynam. Kennlinie
Q©
Q
der glühenden Kohle zustande. Durch Stossionisa©
©
I = (Vm − VB )/RV )
©
tion
wächst der Strom an, so dass der Widerstand
dVB /dIB negativ wird. Der Lichtbogen ist instabil.
I◦ + I
IB
Die statische Strom-Spannungs-Charakteristik zeigt eine fallende Kennlinie. Der Strom
muss stabilisiert werden, indem ein genügend grosser Widerstand RV vor den Lichtbogen
geschaltet wird. Die Drosselspule D sorgt dafür, dass der Speisestrom I◦ konstant gehalten
wird und Wechselströme nicht über die Spannungsquelle abfliessen.
Der Strom durch den Bogen ist also IB = I◦ + I, und
q ∼∼q- A R ∼
q ∼∼q B
∼
es ist dIB = dI. Für den Kreis ABCD gilt nach der 2.
L
D I◦
Kirchhoffschen Regel:
+
¤+¡
Vm I ?
6
¤
¡
I
B − VB
−
d2 I
I
dI
dVB
C
+L 2 +R
+ =0.
(72)
dt
dt
dt C
C
RV D
Es entsteht eine ungedämpfte Schwingung, wenn sich die Terme mit VB und R
dVB
dI
dIB
= −R
= −R
.
dt
dt
dt
kompensieren, also gilt
Der Widerstand R = −
dVB
entspricht einer fallenden Kennline und Gleichung (72)
dIB
reduziert sich auf
L
d2 I
I
+
=0,
dt2
C
deren Lösung ist eine ungedämpfte Schwingung mit der Kreisfrequenz
VA
1M
IA
VG
RG
R'
LG
I
C
L
+ -
+
Eo
ω◦ =
s
1
.
LC
b) Durch Rückkopplung mit Transistoren oder Elektronenröhren hier als Elektronenröhrengenerator.
Nach Kap. 3.2.6 kann man den Anodenstrom IA mit
der Gitterspannung VG steuern. Wählt man eine GitterWechselspannung, so überlagert sich dem Anodenstrom
ein Wechselstrom, der im angeschlossenenSchwingkreis
eine Schwingung induzieren kann.
78
I
t
VA
t
IA
t
5.3.4
Man kann jedoch durch geeignete Rückkopplung
(A. Meissner, 1913) erreichen, dass der Schwingkreis die Energiezufuhr selber steuert, auf die GitterWechselspannung kann dann verzichtet werden. Eine
im Schwingkreis einmal angeregte Schwingung induziert
über die Spule LG eine Gitter-Wechselspannung, welche
IA so steuert, dass im richtigen Takt dem Schwingkreis
Energie nachgeliefet wird. Obwohl heute Transistoren
die Elektronenröhren weitgehend verdrängt haben, werden letztere für hohe Leistungen noch immer benutzt.
Harmonische Wechselströme
Die Stromkreisanalyse wird vereinfacht, wenn man komplexe Spannungen und Ströme
einführt. Wie bei der Behandlung mechanischer Schwingkreise sind nur die Realteile (bzw.
Imaginärteile) dieser komplexen Ausdrücke die physikalisch messbaren Grössen. Statt der
reellen EMK Vm = V◦ cos ωt schreiben wir also Vm = V◦ eiωt .
1) Ohmscher Widerstand
Vm
Vm = V◦ eiωt = VR = I R ,
iωt
m
∼ V◦ e
V◦ iωt
R
also I =
e .
R
Strom I und Spannung VR haben das gleiche Argument
in der Exponentialfunktion, sie sind also in Phase.
Es ist
I(t)
t
2) Selbstinduktion
q
dI
Mit dem Kirchhoff’schen Gesetz ist V◦ eiωt = L
,
dt
∼mV◦ e
Z
Z
V◦
V◦ 1 iωt
also I = dI =
e .
eiωt dt =
L
L iω
Führen wir die Abkürzung
ZL = iωL
ein,
6
iωt
∼mI V Z
Vm
V◦ e
so wird I =
=
.
?
ZL
ZL
ZL nennen wir den Wechselstromwiderstand oder Impedanz der Selbstinduktion. Mit
Hilfe des Impedanzbegriffes gestattet die komplexe Schreibweise eine besonders einfache
Darstellung der Strom-Spannungs-Beziehungen. Z tritt bei Wechselströmen an die Stelle
von R. Wollen wir den messbaren Strom erhalten, so müssen wir den Realteil bilden.
iωt
≀
L≀
≀q
Vm
ℜ{I(t)} = ℜ{
I(t)
t
V◦
V◦
(cos ωt + i sin ωt)} =
sin ωt .
iωL
ωL
Der Strom hinkt um π/2 hinter der Spannung nach,
d.h. das Maximum von I folgt zeitlich nach jenem der
Spannung.
3) Kondensator
Vm ∼m
Mit dem Kirchhoff’schen Gesetz ist
C
und mit
I=
79
dQ
dt
ist
iω V◦ eiωt
Q
V◦ eiωt = VC = ,
C
I
=
C
Vm
I(t) = iω C V◦ eiωt
also
I(t)
und mit der
Impedanz des Kondensators
t
ZC =
1
iω C
Vm
V◦ eiωt
=
.
ZC
ZC
Die reelle Lösung lautet ℜ{I(t)} = ℜ{iωC(cos ωt + i sin ωt)} = −ωC V◦ sin ωt .
Der Strom eilt der Spannung um π/2 voraus.
wird
I=
4) Serienresonanzkreis
Alle drei Impedanzen sind in Serie hintereinander geschaltet. Mit dem Kirchhoff’schen
Gesetz ist V◦ eiωt = I (R + ZC + ZL ) . Die komplexen Impedanzen dürfen addiert
werden wie die Ohmschen Widerstände und damit ist
C
q
≀
V◦ eiωt
iωt ∼
m
L≀
I(t) =
.
V◦ e
≀q
R + Z C + ZL
R
Mit den Impedanzen darf in komplexer Schreibweise wie
mit Ohmschen Widerständen gerechnet werden.
Für den Realteil erhalten wir
(
V◦
ℜ{I(t)} = ℜ
R + iωL +
=
1
iωC
e
iωt
)
(
1
V◦ (R − i(ωL − ωC
))(cos ωt + i sin ωt)
=ℜ
1
1
))
(R + i(ωL − ωC ))(R − i(ωL − ωC
1
V◦ (R cos ωt + (ωL − ωC
) sin ωt)
V◦
=q
1 2
2
R + (ωL − ωC )
R2 + (ωL −
mit (vgl. Anhang C.1.1)
ωL −
tan δ =
R
1
ωC
1 2
)
ωC
)
cos(ωt − δ) = I◦ cos(ωt − δ) ,
V◦
und I◦ = q
2
R + (ωL −
1 2
)
ωC
(73)
Die Stromamplitude I◦ hängt in ähnlicher Weise von ω ab wie die Amplitude der stationären, erzwungenen Schwingung eines linearen, harmonischen Oszillators [Mechanik
Kap. 7.4]. Auch die Wechselstromamplitude I◦ (ω) zeigt Resonanz.
I◦ erreicht seinen maximalen Wert
Io
δ
I o max
I o max
2
I◦ = I0,max =
+π/2
V◦
,
R
1
1
, d.h. ω 2 = ω◦2 =
.
ωC
LC
−π/2 Die Resonanzfrequenz ist also gerade durch die
0
ωο
Thomson-Bedingung beim ungedämpften LCω
∆ ω 1/2
Schwingkreis gegeben. An dieser Stelle ist
δ = 0, d.h. Strom und Spannung sind in Phase. Die Breite der Resonanzkurve wird wie
in der Mechanik durch die Dämpfung, d.h. durch R bestimmt. Der genaue Vergleich von
Gleichung (73) mit der Amplitude der erzwungenen mechanischen Schwingung zeigt, dass
R/L der mechanischen Grösse β/m entspricht. Somit können wir auch die in der Mechanik
0
wenn ωL =
80
[Kap. 7.4] hergeleitete Formel für die Halbwertsbreite der Resonanzkurve bei schwacher
Dämpfung übernehmen. Die “gesamte Breite bei halber Höhe” (FWHM = Full Width at
Half Maximum) ist mit Gl. (73)
√
1
1
= 2
, und ω ′ = ω◦ + ∆ω für ∆ω ≪ ω◦ ⇒ ∆ω1/2 ≈ 3
2
′
′
2
4R
R + (ω L − 1/ω C)
R
L
.
Anwendung: Mit dieser Resonanz eines Schwingkreises wird bei Radio- oder TVEmpfängern selektiv eine Sendefrequenz herausgefiltert.
5) Parallelschaltung Die Rechnung läuft analog zum vorherigen Beispiel. Es sei nur
noch erwähnt, dass bei der Parallelschaltung von Impedanzen
q
q RΩ
q
X 1
1
≀ wie bei der von Ohm’schen Widerständen gilt
=
.
≀
m
∼
C R L≀
Ztot
i Zi
≀q Als 2. Dämpfung wirkt der Ohm’sche Widerstand RΩ der Spule.
q
q
5.3.5
Transformatoren
Wir betrachten zwei eng übereinander gewickelte Spulen (in
der Skizze getrennt gezeichnet), wobei an Spule 1 eine WechL1
R selspannung angelegt sei. L12 sei der Koeffizient der gegensei~
L2
Voei t
tigen Induktion. Sein Vorzeichen hängt vom Wicklungssinn
der beiden Spulen ab. Der Widerstand der Spule 1 wird vernachlässigt. Dann gilt gemäss Kirchhoff
L12
dIp
dIp
dIs
dI
s
= L1
und für Spule 2: ± L12
= L2
+ Is R .
für Spule 1: V◦ eiωt ± L12
dt
dt
dt
dt
Diese zwei gekoppelten Differentialgleichungen können mit dem Ansatz72
Ip
Is
Ip (t) = Ip◦ eiωt
und
Is (t) = Is◦ eiωt
gelöst werden.
Dabei sollen die beiden Amplituden Ip◦ und Is◦ komplex sein, d.h. zwischen ihnen kann
eine Phase bestehen. Einsetzen in die Differentialgleichungen ergibt:
V◦ = L1 Ip◦ iω ∓ L12 Is◦ iω
und
0 = L2 Is◦ iω ∓ L12 Ip◦ iω + Is◦ R .
Daraus berechnet man
Is◦ = ±
R LL121
V◦
+
L L −L2
iω( 1 L212 12 )
und
Ip◦ =
V◦ (R + iωL2 )
.
iωRL1 − ω 2 (L1 L2 − L212 )
(74)
Für einen idealen Transformator mit Eisenkern gilt:
1. Alle Feldlinien verlaufen im Eisenkern (keine Sättigung oder Streufeld).
2. Es gibt keine Wirbelstromverluste im Eisenkern (z.B. lamellierter Eisenkern).
3. Der Primärkreis (Spule 1) hat keinen Ohmsche Widerstand.
N12 A
N22 A
Nach Gl. (67) ist dann L1 = µµ◦
und L2 = µµ◦
.
ℓ
ℓ
L12 erhält man aus folgender Überlegung. Spule 1 induziert in Spule 2 eine EMK
Vm,2 = −L12
72
dIp
dΦ1
d
d
N1
N1 N2 A dIp
= −N2
= −N2 (AB1 ) = −N2 (Aµµ◦ Ip ) = −µµ◦
.
dt
dt
dt
dt
ℓ
ℓ
dt
Die Lösung ist nicht vollständig, es interessiert jedoch nur die harmonische partikuläre Lösung.
Als andere Methode kann man die 2. Differentialgleichung in die 1. einsetzen und erhält dann eine
Differentialgleichung 1. Ordnung (vgl. auch Fussnote76 zur Lösung gekoppelter Dgl’s).
81
q
√
N1 N2 A
= L1 L2 und L12 < L1 L2 bei nicht idealer
ℓ
Kopplung. Aus Gl. (74) erhält man dann mit L212 = L1 L2 , L1 /L2 = N12 /N22
Mit L1 , L2 ist: L12 = µµ◦
Is◦ = ±
Ip◦ =
V◦ N2
V◦
L1 = ±
R N1
R L12
Strom und Spannung in ±Phase (Wickelsinn)
V◦ (−iR + ωL2 )
V◦ L2
1
V◦ (R + iωL2 )
=
=
( −i ).
iω R L1
ω R L1
L1 R
ω
Falls R ≪ ωL2 , so ist
Ip◦ ≈
V◦ N22
R N12
Strom und Spannung sind in Phase.
Ip◦
N2
≈±
Is◦
N1
Also wird das Verhältnis der Stromamplituden:
.
Das entsprechende Verhältnis der Spannungen ist
V◦ eiωt
V◦
V◦ R N1
N1
=
=±
=±
,
Is R
Is◦ )R
R V◦ N2
N2
Vp◦
N1
.
≈±
Vs◦
N2
also
Mit dem Transformator können also z.B. hohe Spannungen, mit denen Elektrizität vom
Erzeugungsort zum Verbraucher transportiert wird, auf niedrige Spannungen am Verbraucherort umgespannt (transformiert) werden. Zwei Spezialfälle sind
V◦ L12 iω
V◦ L2 iω
a) Kurzschluss R = 0 ⇒ Is◦ = − 2
→ ∞, Ip◦ = − 2
→ ∞.
2
ω (L1 L2 − L12 )
ω (L1 L2 − L212 )
V◦
keine Leistung bei π/2 Phase.
b) keine Last R = ∞ ⇒ Is◦ = 0, Ip◦ =
iωL1
c) Eine Phasenverschiebung kann durch eine C, L-Kombination kompensiert werden.
5.3.6
Arbeitsleistung eines Wechselstromes
Wird ein harmonischer Oszillator an ein Netzwerk mit einer komplexen Impedanz
angeschlossen, so sind Strom und Spannung im allgemeinen
V(t)
nicht in Phase. Ist V = V◦ cos ωt und I = I◦ cos(ωt + ϕ),
I(t)
so ist die momentane Leistung73
P = IV = I◦ V◦ · cos(ωt + ϕ) cos ωt .
−ϕ
t
Die im Zeitintervall dt vom Generator geleistete Arbeit ist
I◦ V◦
[cos(2ωt + ϕ) + cos ϕ] dt.
dW = IV dt = I◦ V◦ cos ωt · cos(ωt + ϕ) dt =
2
Die über eine Periode gemittelte Leistung P̄ des Generators ist mit T = 2π/ω
T
T
1 Z I◦ V◦
1Z
[cos(2ωt + ϕ) + cos ϕ] dt
dW =
P̄ =
T
T
2
IV
+
–
73
0
+
–
t
also
0
P̄ =
I◦ V◦
cos ϕ = Veff Ieff cos ϕ
2
Hier darf nicht komplex gerechnet werden da ℜ{I · V } 6= ℜ{I} · ℜ{V } = P ist.
82
I◦
V◦
mit Veff = √ ; Ieff = √ = 0.707 I◦ . Ieff ist die Stromstärke, die ein Gleichstrom haben
2
2
müsste, um dieselbe Leistung abzugeben wie der betreffende Wechselstrom. Der Effektivwert unseres Elektrizitätsnetzes ist 230 V. Hitzdrahtinstrumente oder Elektrometer,
deren Anzeigen von der Stromrichtung unabhängig sind, geben Effektivwerte an.
Bei Ohm’schen Widerständen ist ϕ = 0 und deshalb
I o2
I 2 (t)
1
P̄ = Ieff Veff = I◦ V◦
2
I eff 2
Bei Selbstinduktionnen oder Kapazitäten ist ϕ = ±π/2,
also P̄ = 0. Dies sind wattlose Schaltelemente. Die in jeder
t
Halbperiode zum Aufbau des Feldes im Kondensator oder
I(t)
der Spule notwendige Energie wird in der nächsten
Halbperiode wiedergewonnen. Deshalb nennt man P̄ die Wirkleistung und Ieff Veff die
Scheinleistung74 .
Io
5.4
5.4.1
Maxwell’scher Verschiebungsstrom und Gleichungen
Der Maxwell’sche Verschiebungsstrom
Das Faradaysche Induktionsgesetz zeigt, dass zeitlich variable Magnetfelder elektrische
Felder induzieren. Es stellt sich die Frage, ob umgekehrt auch zeitlich variable elektrische Felder Magnetfelder erzeugen können. Diese Frage Hist eng mit jener verknüpft, ob
~ d~s = I kann nur dann allalle Ströme geschlossen sind. Das Ampère’sche Gesetz H
gemeingültig sein, wenn der Strom nirgends unterbrochen wird. Stationäre Ströme sind
geschlossen. Bei einem nichtstationären Wechselstrom über einen Kondensator endet der
Leitungsstrom jedoch an den Kondensatorplatten. Maxwell führte deshalb den
Verschiebungsstrom ein:
~
Der Strom I = dQ
in einem Leiter erzeugt ein Magnetfeld H,
dt
→
einen Schlauch magnetischer Feldlinien um den Leiter. In eiA
H
~
→
ner Anordnung mit Wechselstrom und einem Plattenkondensator
E
gilt dies für den Leiter von und zum Kondensator.
→
AD
H
~
Maxwells Verallgemeinerung: Das H-Feld
umfasst auch das sich
I
~
ändernde E-Feld im Kondensator.
Der fliessende Strom ist hier nur durch das sich zeitlich ändernde elektrische Feld dem
Verschiebungsstrom gegeben. Damit wird der Strombegriff erweitert. Es gibt nur geschlossene Ströme: im Leiter den Leitungsstrom und im Kondensator den Verschiebungsstrom.
Damit wird das Ampére’sche Gesetz formuliert mit einer Kontur CD um den Draht:
I
CD
~ d~r =
H
Z
~=I
~j dA
AD
AD ist die von CD umschlossene Fläche. Um den Kondensator mit der Kontur C und der
I
dQ
∂ Z
∂ Z
~
Fläche A gilt
H d~r = I und I =
=
σ dA =
Dn dA
dt
∂t
∂t
C
A
74
A
Eine eventuelle Blindenergie wird beim Elektrizitätstarif berücksichtigt: “Wird der Leistungsfaktor
cos ϕ = 0.92 während den Hochbelastungsstunden unterschritten, so ist für jede mehr bezogene Blindkilowattstunde 2.5 Rp/kW zu bezahlen” Gemeinde Zollikon 21.3.1973.
83
mit σ der Flächenladungsdichte
auf einer Kondensatorplatte. Da aus dem allgemeinen
R
Gaussschen Satz gilt Q = Dn dA und Dn = Q/A = σ für den Plattenkondensator, folgt:
I
C
~ d~r =
H
Z
A
Z
∂Dn
dA + jn dA
∂t
sowie differentiell
A
~
~ = ~j + ∂ D
∇×H
∂t
(75)
Dies ist die Integral- und Differentialform der 4. Maxwell’schen Gleichung . Sie ist
~
eine neue Stromdefinition. Jede zeitliche Änderung eines D-Feldes
stellt einen Strom dar,
der sich durch seine magnetische Wirkung äussert, die wiederum gleich jener durch die
Leitungsströme ist.
Es gibt auch einen theoretischen Grund, den Verschiebungsstrom einzuführen.
~ =0
Die Vektoroperation ∇ · (∇ × H)
~ = ~j vollständig,
ist nach (Anhang C.2) für ein beliebiges Vektorfeld gültig. Wäre ∇ × H
so würde folgen ∇ · ~j = 0 und die elektrische Stromdichte aus einer Fläche heraus wäre
∂ρ
immer null, im Widerspruch zur Kontinuitätsgleichung ∇ · ~j = − . Der Widerspruch
∂t
~
kann beseitigt werden, wenn nach Gl. (75) zu ~j noch der Term ∂ D/∂t
addiert wird. Es
∂
~
gilt dann mit ∇ · D = ρ sowie vertauschen von ∇ und ∂t
~
~ = ∇ · ~j + ∇ · ∂ D = ∇ · ~j + ∂ρ = − ∂ρ + ∂ρ = 0
∇ · (∇ × H)
∂t
∂t
∂t
∂t
Ein direkter Nachweis des Verschiebungsstromes ist schwierig, da in elektrischen Feldern mit langen Feldlinien keine Verschiebungsströme hinreichender Grösse erzeugt werden können. Mit Hochfrequenzfeldern treten Probleme auf, da dann der offene Kondensator als eine Antenne elektromagnetische Wellen abstrahlt (Kap. ??).
5.4.2
Die Maxwell’schen Gleichungen
Damit haben wir vier Maxwell-Gleichungen, mit denen vollständig die Statik und Dyna~ = εε◦ E
~ und B
~ = µµ◦ H
~ beschrieben
mik von Ladungen und Strömen mit ihren Feldern D
werden.
ε◦ = 107 /4πc2 [A2 /N ] = 0.8854188 · 10−11 [As/V m]
µ◦ = 4π · 10−7 [N/A2 ] = 1.256637 · 10−6 [V s/Am]
√
mit c = 1/ ε◦ µ◦ = 299792458 m/s. c ist seit 1983 definiert und deshalb exakt.
84
Integralform
Differentialform
Gauss’ Satz:
R
A Dn dA = V ρdτ
R
A Bn dA = 0
Faraday’ Induktionsgesetz:
R
H
~
Edr
= − Ḃn dA
~
∇·D
~
∇·B
R
C
~
∇×E
A
Ampère-Gesetz:
H
C
~ r = R jn dA + R Ḋn dA
Hd~
A
A
Kraftgesetz:
Potentiale:
~
E = −∇ V
~ =∇×A
~
B
Materialgesetze:
~ = µµ◦ H
~ = µ◦ (H
~ +M
~)
B
Quellen:
=ρ
=0
Wirbel:
~
B
= − ∂∂t
~ ~
~ = ∂D
∇×H
∂t + j
(76)
~ + ~v × B)
~
F~ = q · (E
∆V = −ρ/εε◦
~ = −µµ◦~j
∆A
~ = εε◦ E
~ = ε◦ E
~ + P~
D
Kurze Diskussion der Maxwell Gleichungen
1. Die Maxwell-Gleichungen sind gekoppelte, lineare partielle Differentialgleichungen
1.Ordnung in ~r und t.
~ und B
~ als “Nahwirkung” über die 1. und 4. Gl. (76).
2. ρ(~r, t) und ~j(~r, t) beeinflussen E
~ und B
~ sind wechselseitig voneinander abhängig: mit ∂ E/∂t
~
3. E
6= 0 folgt ein Wirbelfeld
~
~
~
(∇× B 6= 0) und ∂ B/∂t 6= 0 wird durch ∇× E 6= 0 mit dem Induktionsgesetz kompensiert.
4. Die 1. Gl. (76) beinhaltet die Existenz von Ladungen (Quellen und Senken des elektrischen Feldes), aus der 2. Gl. (76) folgt, dass magnetische Monopole nicht existieren und
magnetische Feldlinien geschlossen sein müssen.
H
~ = − R Ḃn dA = −Φ̇
5. Die Kirchhoffsche Maschenregel wird durch die 3. Gl. (76) C Edr
A
mit beliebiger Masche (Integrationsweg C) und der elektromotorischen Kraft −Φ̇ (z.B.
Batterie, Generator) dargestellt.
³
´
~ = D
~˙ + ~j
~ −∇ · D
~˙ = −ρ̇
6. Die 4. Gl. (76) ∇ × H
mit ∇ · ~j = ∇ · ∇ × H
|
{z
=0
}
beinhaltet die Knotenregel. Für jede geschlossenen
Fläche gilt, sofern sie nicht zwischen
R
P
~
~
Kondensatorplatten hindurchgeht,
Ii = JdA = 0.
7. Der physikalische Raum kann in einen elektromagnetischen Zustand versetzt werden,
der durch das elektromagnetisches Feld beschrieben wird und dessen experimentell prüfbare Eigenschaften durch die Maxwell-Gleichungen dargestellt werden. Diese formale, mathematische Struktur vereinigt die elektrischen mit den magnetischen Feldern zu einer
einzigen elektromagnetischen Wechselwirkung. Die Vereinigung der elektromagnetischen
Wechselwirkung mit der Optik, d.h. der Beschreibung der elektromagnetischen Wellen wie
auch des Lichtes durch die Maxwell-Gleichungen wird in folgenden Kapiteln behandelt.
85
A
Physikalische Konstanten Stand 1986
Physikalische Grösse
Symbol
Wert(Fehler)
Einheit
Lichtgeschwindigkeit
magn. Feldkonst., Induktionskonst.
el. Feldkonst., Influenzkonst.=1/µ0 c2
Gravitationskonstante
Standardschwerebeschleunigung
Fallbeschleunigung Zürich (452 m)
Plancksche Konstante
h/2π
c
µ0
ǫ0
G
gn
gZ
h
h̄
h̄c
e
Φ0
RH
α
α−1
u
u
−e/me
me
me
me
mµ
mµ
mµ /me
mp
mp
mp
mp /me
mn
mn
mn
mn /me
mn /mp
ERy
a0
λe
re
σe
µB
µM
µN
ge
gµ
gp
gn
γp
γµ
µµ /µp
µn /µp
µn /µe
N◦ =L
F
R
k
VM
b
σ
2.997 924 58 × 108
4π × 10−7
8.854 187 817 × 10−12
6.672 59(85) × 10−11
9.806 65
9.806 52
6.626 075 5(40) × 10−34
1.054 572 66(63) × 10−34
197.327 053(59)
1.602 177 33(49) × 10−19
2.067 834 61(61) × 10−15
2.581 280 56(12) × 104
7.297 353 08(33) × 10−3
137.035 989 5(61)
1.660 540 2(10) × 10−27
931.494 32(28)
−1.758 819 62(53) × 1011
9.109 389 7(54) × 10−31
5.485 799 03(13) × 10−4
0.510 999 06(15)
1.883 532 7(11) × 10−28
105.658 389(34)
206.768 262(30)
1.672 623 1(10) × 10−27
1.007 276 470(12)
938.272 31(28)
1836.152 701(37)
1.674 928 6(10) × 10−27
1.008 664 904(14)
939.565 63(28)
1838.683 662(40)
1.001 378 404(9)
13.605 698 1(41)
0.529 177 249(24) × 10−10
2.426 310 58(22) × 10−12
2.817 940 92(38) × 10−15
0.665 246 16(18) × 10−28
927.401 54(31) × 10−26
4.485 221 9(15) × 10−26
0.505 078 66(17) × 10−26
2 × 1.001 159 652 193(10)
2 × 1.001 165 924(9)
2 × 2.792 847 386(63)
−2 × 1.913 042 75(45)
2π × 42.577 469(13)
2π × 135.538, 793(40)
3.183 345 47(47)
−0.684 979 34(16)
−0.001 040 668 82(25)
6.022 136 7(36) × 1023
96 485.309(29)
8.314 510(70)
1.380 659(12) × 10−23
22.414 10(19) × 10−3
2.897 756(24) × 10−3
5.670 51(19) × 10−8
m s−1
V s A−1 m−1
A s V−1 m−1
m3 kg−1 s−2
m s−2
m s−2
Js
Js
MeV fm
As=C
V s = Wb
V A−1 = Ω
Elementarladung
magnetische Flussquant, h/2e
quatisierter Hall-Widerst. h/e2
Feinstrukturkonstante, µ0 ce2 /2h
inverse Feistrukturkonstante
Atomare Masseneinheit m(12 C)
Spezifische Ladung des Elektrons
Elektronenmasse
Myonenmasse
Protonenmasse
Neutronenmasse
Rydberg-Energie, chR∞
Bohrscher Radius, α/(4πR∞ )
Compton Wellenlänge, h/me c
klassischer Elektronenradius, α2 a0
Thomson Wirkungsquersch., re2 8π/3
Bohrsche Magneton, eh̄/2me
Myonmagneton, eh̄/2mµ
Kernmagneton, eh̄/2mp
g-Faktor Elektron, 2µe /µB
g-Faktor Myon, 2µµ /µM
g-Faktor Proton, 2µp /µN
g-Faktor Neutron, 2µn /µN
Gyromag. Verhältnis Proton B/ω
Gyromag. Verhältnis Myon B/ω
Magn. Moment Verhältnis
Magn. Moment Verhältnis
Magn. Moment Verhältnis
Avogadro (Loschmidt) Konstante
Faraday-Konstante, N◦ e
Molare Gaskonstante
Boltzmann-Konstante, R/N◦
Molvolumen (273.15 K, 101325 Pa)
Wiensche Konstante, λmax T
Stefan-Boltzmann-Konstante
86
kg
MeV/c2
C kg−1
kg
u
MeV/c2
kg
MeV/c2
kg
u
MeV/c2
kg
u
MeV/c2
eV
m
m
m
m2
J/T = A m2
J/T
J/T
2π MHz T−1
2π MHz T−1
mol−1
C mol−1
J K−1 mol−1
J K−1
m3 mol−1
mK
W m−2 K−4
Fehler
(ppm)
exakt
exakt
exakt
128
exakt
0.60
0.60
0.30
0.30
0.30
0.045
0.045
0.045
0.59
0.30
0.30
0.59
0.023
0.30
0.61
0.32
0.15
0.59
0.012
0.30
0.020
0.59
0.014
0.30
0.022
0.009
0.30
0.045
0.089
0.13
0.27
0.34
0.34
0.34
10−5
0.009
0.023
0.024
0.30
0.30
0.24
0.24
0.24
0.59
0.30
8.4
8.5
8.4
8.4
34
B
B.1
Grössen und Einheiten der Physik
Grössenart, Dimension, Einheitensystem
In diesem Kapitel werden die wesentlichen Grundlagen der Einheiten, Zahlenwerte, Dimensionen und Einheitensysteme zusammenfassend dargestellt [vgl. Kamke, Krämer;
Physikalische Grundlagen der Masseinheiten, Teubner 1977].
B.1.1
Grösse und Zahlenwert
Für eine physikalische Grösse G gibt der Messwert {G} an, wie oft die Einheit [G] in G
enthalten ist:
G
oder
G = {G} [G] für Gleichungen.
{G} =
[G]
Z.B. v = 50 km
(ohne [. . . ]), 50 ist hier als Messwert eine reine Zahl. Mit Angabe des
h
Messfehlers schreibt man: v = (50 ± 2) km
oder auch v = 50(2) km
, wobei der Fehler der
h
h
letzten angegebenen Stellen in Klammern gesetzt wird.
B.1.2
Grössenart und Dimension
Längenangaben, wie z.B. Höhe, Umfang, Dicke, haben die gleiche Grössenart Länge, die
Dimension dieser Grösse ist die Länge. Die Einheiten können sein: 1 m, 1 inch, 1 Lichtjahr,
usw.
Summen und Differenzen sowie Vergleiche (<, ≤, >, ≥, =, 6=) können nur zwischen
Grössen gleicher Grössenart und gleicher Dimension gebildet werden.
·
¸
dr m
∆r
=
Eine Differentiation z.B.
v = lim
∆t→0 ∆t
dt s
liefert die Dimension der zu differenzierenden Grösse dividiert durch die Dimension des
Differentials und bei einer Integration
r=
Zt
v(t′ )dt′ [m]
durch Multiplikation des Differentials.
t◦
Es gibt einige Grössenarten,
die die gleiche Dimension haben, wie z.B. der Skalar
R
Energie oder die Arbeit F~ · d~r [F ℓ] und der Pseudovektor (Axialvektor) Drehmoment
~r × F~ [ℓF ]. Diese Grössen unterscheiden sich jedoch physikalisch durch ihr Stufe (Skalar
S, Pseudoskalar P , Vektor oder polarer Vektor V , Pseudovektor oder axialer Vektor A,
Tensor T ).
In Additionen und Subtraktionen dürfen nur Grössen gleicher Stufe verbunden werden. Für das Produkt von Grössen verschiedener Stufen gelten aus Symmetriegründen
Grundregeln, wie V · V = S, V × V = A, V × A = V (vgl. Fussnote S. ??).
Eine Division ist nur mit Skalaren einfach. Tritt formell der Ausdruck ~a/~b auf, dann
kann mit einer Erweiterung mit ~b gebildet werden
~a ~a · ~b ~a · ~b
=
= 2 .
~b
~b · ~b
b
Dieser Rechentrick kann auch für komplexe Zahlen (als 2-dim. Vektoren) angewendet
werden.
87
B.1.3
Grössengleichungen
und links identisch sein
In Gleichungen, wie F = Γ m1r2m2 muss die Dimensionh rechts
i
N m2
(Dimensionskontrolle). Damit ist die Dimension von Γ kg2 bestimmt.
Mathematische Funktionen in Grössengleichungen, wie sin, cos, log, ln, sinh,
exp, müssen als Argument unbenannte (dimensionslose oder Eins-Elemente)
Zahlen (auch komplexe) enthalten, z.B. sin(ωt) = sin(2πνt), sin(2πx/λ),
exp(−t/τ ). . .
Diese Regel wird in der Technik und Medizin oft missachtet [z.B. Grössenklasse eines
Sternes mv = −2.5 · log10 (Luminosität [W/m2 ]/2.52 · 10−8 )]. Einheiten und Dimensionen
gehen verloren, es besteht die Gefahr von Rechenfehlern und Dimensionskontrollen können
nicht mehr durchgeführt werden. Die Formel ist keine Grössengleichung.
B.1.4
Winkel und Raumwinkel
ϕ2
s
ϕ
R=1
ϕ1
ϕ=0
Ein Winkel wird definiert als das Bogenmass d.h. die Bogenlänge
im Einheitskreis:
ϕ=
s
s
=
[rad] mit R = 1.
R
1m
ϕ = ϕ2 − ϕ1 =
s1
s2 s1
s2
−
=
− .
1m 1m
R
R
Das Bogenmass ist eine dimensionslose Grösse (Verhältnisgrösse) mit der Bezeichnung
rad (Radiant), ein voller Winkel ist ϕ = 2π. Die auch übliche Angabe in Grad ist
Grad= rad · 180◦ /π mit 360◦ für den vollen Winkel.
Der Raumwinkel ist die auf einer Einheitskugel aufgespannte Kugeloberfläche
A
Ω
B.1.5
A
A
=
[sr]
1 m2
R2
mit der Einheit [sr] (Steradiant). Eine Vollkugel hat Ω = 4π sr.
Manchmal wird der Raumwinkel (z.B. eines Detektors) auch in
Einheiten von 4π angegeben.
Ω=
R=1
Wahl der Basisgrössen in Einheitensystemen
Als Bedingungen für ein Einheitensystem können die folgenden aufgestellt werden75 :
(i) Beschränkung auf ein Minimum an Einheiten
(ii) Die Bildung neuer Grössen (nicht Dimensionen) soll nur durch Multiplikation
und Division
bestehender Grössen bestimmt werden. Z.B. Fläche=(Länge)2 , nicht aber
√
Länge= Fläche mit der Fläche als Basis.
(iii) Die Struktur des physikalischen Begriffsystems ist durch folgende Axiome gegeben:
1. C = A · B Multiplikative Bildung von Grössenarten. Hierbei ist keine der Grössen
A, B, C voreinander ausgezeichnet.
2. Unbenannte Zahlen (1) = A◦ (Eins-Elemente) ändern die Dimension einer Grösse
nicht, A · (1) = A, z.B. [Länge]·5=[Länge], [Bogenlänge/Radius]=(1) [rad], [Wirkungsgrad
75
Fleischmann, Zeitschrift für Physik 129(1951)377. Hier beziehen sich Produkt, Quotient, Multiplikation, Division nicht nur auf reine unbenannte Zahlen (dimensionslose Grössen) oder Skalare sondern auf
allgemein benannte Grössen.
88
η= Arbeit/Wärme].
3. Reziproke Grössen A−1 multipliziert mit der Grösse A · A−1 = (1) ergibt unbenannte
Zahlen, z.B. [Frequenz·Zeit]=(1).
4. Es gilt das assoziative Gesetz A · (B · C) = (A · B) · C und das kommutative Gesetz
A · B = B · A. Die Bedingungen 1.-4. bilden eine kommutative Abelsche Gruppe.
5. Für alle A 6= (1) und m ∈ IN \ 0 gilt Am 6= (1), d.h. die Gruppe ist keine Drehgruppe, sie ist torsionsfrei76 .
6. Die aus unendlich vielen Grössenarten bestehende Gesamtheit besitzt ein endliches
Erzeugendensystem, d.h. es gibt endlich viele (N )-Elemente Cp , Cq , . . . Cr , so dass jedes
Element X sich bildet mit X = Cpαp · Cqαq · Crαr , αi ganzzahlig. Eindeutigkeit besteht,
wenn kein Ci durch die anderen ausgedrückt werden kann (unabhängige Erzeugende bzw.
Basis). Eindeutigkeit der Darstellung wird nicht vorausgesetzt, z.B. ist ~r × F~ = −F~ × ~r.
1.-6. sind das vollständige Axiomensystem der Gruppe, für die gilt:
Satz: Es gibt mindestens eine Basis B1 . . . Bn mit n ≤ N .
Für n = 1 gibt es genau zwei Basen B1 und B1−1 .
Für n > 1 gibt es unendlich viele, gleichwertige Basissysteme. Ein Basissystem entspricht
den n linear unabhängigen Grundvektoren eines n-dimensionalen Punktgitters.
Die Anzahl der Elemente einer Basis werden durch folgende Bedingungen bestimmt:
Es gebe in einem Gebiet k voneinander unabhängige Gleichungen zwischen l Grössenarten
mit l > k, dann sind n = l − k unbestimmt und damit Grundgrössen (Basis).
Z.B. in der Geometrie ist l eine Grundgrösse mit den Gleichungen A = l2 , V = l3 ;
in der Kinematik die zwei Grundgrössen Länge, Zeit mit den Gleichungen v = l/t, a = l/t2 ;
in der Dynamik mit drei Grundgrössen:
a) Système International d’Unites (SI) {l,Masse,t} mit [m, kg, s]
b) technisches System {l, F, t} mit [m, kp, s]
c) natürliche Einheiten {v, Energie E, Wirkung S} mit c = me c2 = h̄ = 1
d) sowie viele andere mögliche Systeme.
Physikalisch sind alle Basen gleichbedeutend, die Einheiten (Masszahlen wie cm, m,
s, Std, Lichtjahre . . . ) sind belanglos, wesentlich ist die Verknüpfung und deren Eindeutigkeit. Es darf keine zweite, verschiedene, gleichzeitig geforderte Definition geben. Die
Begriffsverknüpfungen (Definfitionen von Grössenarten der Form A · B = C) sind keine
Naturgesetze, sie passen sich jedoch der Naturerfahrung an (wie v = l/t, F = m · b)
ud stehen mit der Physik nicht im Widerspruch. Die Ganzzahligkeit
des Exponenten ist
√
eine reine Zweckmässigkeit, gebrochene Exponenten ( E) sind mathematisch einfach ,
physikalisch jedoch problematischer einzuführen.
Vorsicht: Zusatzvereinbarungen, die das nte Basiselement aus den (n − 1) restlichen
definieren, verletzen die Eindeutigkeit.
Z.B. müsste im elektrostatischen cgs-System√Q(el. Ladung)
√ ein unabhängiges Basiselement sein, jedoch ist E · l = Q · Q, Q = E√· l = l · Kraft
und im magnetischen
√
cgs-System ist der Induktionsfluss(Polstärke)= E · l = l · Kraft. Diese Zusatzforderung besagt, der Quotient beider Seiten ist dimensionslos, d.h. man kann nur in diesem
Dimensionssystem jede Grösse mit diesem Quotienten multiplizieren ohne die Grössen zu
verändern, jedoch nicht in einem anderen Dimensionssystem. Die Dimensionssysteme sind
damit nicht eindeutig aufeinander abbildbar.
76
Für eine Drehgruppe gilt Am+n = An mit beliebigen ganzen Zahlen n; eine m-fache Drehung um den
Winkel 2π/m führt zur Identität.
89
B.2
SI-Einheiten
Für Grundgrössen und abgeleitete Grössen wurde an der 11. Generalkonferenz für Mass
und Gewicht 1960 ein kohärentes Einheitssystem, das Systeme International d’Unités (SI),
für den allgemeinen Gebrauch empfohlen. Die der Meterkonvention angehörenden Staaten
sind gehalten, das SI durch Gesetz einzuführen. Das SI ersetzt alle früheren Masssysteme,
wie das cgs- (cm g s), das mks- (m kg s), das technische Masssystem etc.
In Klammern: die in diesem Skript i.a. benutzten Bezeichnungen der Grössen.
Masse (m, M )
1 Kilogramm (kg) ist die Masse des aus Pt-Ir bestehenden Urkilogramms , das im Bureau International des Poids et Mesures in Sevres aufbewahrt wird. Es entspricht ungefähr
der Masse von 1 l Wasser bei 4◦ C.
Zeit (t, T )
1 Sekunde (s) ist die Zeitdauer von 9 192 631 770 Schwingungen des Uebergangs zwischen den beiden Hyperfeinstrukturniveaus im Grundzustand des 133 Cs Atoms.
Länge (l, ℓ)
1 Meter (m) ist die Länge der Strecke, die das Licht im Vakuum während der Dauer
von 1/299 792 458 s zurücklegt. Veraltet: Urmeter (sollte 1/40 000 000 des Meridians durch
Paris sein), 1 m = 1 650 763.73 Wellenlängen des roten Lichtes, das von 86 Kr bei einem
bestimmten Uebergang emittiert wird. Der Meterstandard zeigt, dass die Einteilung in
Grund- und abgeleitete Einheiten willkürlich ist. Definiert ist heute die Lichtgeschwindigkeit c = 2.99792458 ×108 m/s.
Elektrische Stromstärke (I)
1 Ampére (A) ist die Stärke eines Stromes, der durch zwei im Vakuum im Abstand
von 1 m parallel verlaufende, geradlinige, unendlich lange Leiter von vernachlässigbarem
Durchmesser, fliessend, eine gegenseitige Kraft von 2 × 10−7 Newton pro Meter Länge
hervorruft.
Temperatur (T )
1 Kelvin (K) ist der Bruchteil 1/273.16 der thermodynamischen Temperatur des Tripelpunktes von Wasser. Die Celsiusskala ist definiert durch: t(◦ C) = t(K) - 273.15 K.
Schmelzpunkt und Siedepunkt des Wassers unter Normalbedingungen liegen nur ungefähr
bei 0◦ respektive 100◦ C. Der absolute Nullpunkt ist per Definition 0 K.
Quantität der Materie (n, ν)
1 Mol (mol) ist die Menge eines Stoffes, die gleichviele Teilchen N◦ (Atome, Moleküle,
Ionen, Elektronen, ...) besitzt, wie Atome in 12 g des Kohlenstoffisotops 12 C enthalten
sind.
N◦ =
12.000 g/mol
Masse eines Atoms
diese Zahl ändert sich, wenn die
12
12
C
Avogadrosche oder Loschmidtsche Zahl,
C-Atommasse genauer bestimmt wird.
Lichtstärke
1 Candela (cd) ist die Lichtstärke (Intensität I = dΦ/dΩ), mit der 1/60 cm2 Oberfläche
90
eines schwarzen Strahlers bei der Temperatur des beim Druck von 1 atm erstarrenden Pt
(2024.5 K) senkrecht zur Oberfäche strahlt.
Sämtliche Dimensionen physikalischer Grössen lassen sich auf diese 7 Grundgrössen
zurückführen. Z.B. Beschleunigung m/s2 , Kraft N = m kg/s2 . Die 7 Grundgrössen sind
nicht alle fundamentale Basisgrössen. Z.B. wird die Kelvinskala nur eingeführt, weil der
theoretisch existierende Zusammenhang zwischen Temperatur und Energie experimentell
nur schlecht bestimmbar ist. Für die Physik genügen die 4 Basisgrössen m, kg, s und A.
B.2.1
Von den SI-Einheiten abgeleitete Einheiten z.T. mit speziellen Namen
In Klammern: die in diesem Skript i.a. benutzten Bezeichnungen der Grössen.
ebener Winkel (α, ϕ)
Raumwinkel (Ω)
Frequenz (ν)
Geschwindigkeit (~v )
Impuls (~p)
Kraft (F~ )
Druck (p)
Energie,Arbeit (E, W )
Leistung (P )
~ ◦)
Drehimpuls (L
~ ◦)
Drehmoment (M
Trägheitmoment (I◦ )
Wärmemenge (Q)
Entropie (S)
el. Ladung (q, Q)
~
elektrische Feldstärke (E)
~
dielektrische Verschiebung (D)
el. Stromdichte (~j)
el. Spannung, Potential (V )
el. Kapazität (C)
el. Widerstand (R)
el. Leitfähigkeit (σ)
Induktionsfluss (Φ)
~
magn. Induktion (B)
~
magnetische Feldstärke (H)
Induktivität (L)
Lichtstrom
Beleuchtungsstärke
Radioaktivität
absorbierte Strahlungsdosis
Radiant
= rad
Steradiant = sr
Hertz
= Hz
Newton
Pascal
Joule
Watt
=
=
=
=
N
Pa
J
W
Joule
=J
Coulomb
=C
Volt
Farad
Ohm
Siemens
Weber
Tesla
Henry
Lumen
Lux
Bequerel
Gray
91
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=V
=
=F
=
=Ω
=
=S
=
= Wb =
=T
=
=
=H
=
= lm =
= lx
=
= Bq =
= Gy =
m m−1
m2 m−2
s−1
m s−1
kg m s−1
m kg s−2
m−1 kg s−2
m2 kg s−2
m2 kg s−3
kg m 2 s−1
kg m 2 s−2
kg m2
m2 kg s−2
As
V/m
Cb/m2
A/m2
m2 kg s−3 A−1
m−2 kg−1 s4 A2
m2 kg s−3 A−2
m−2 kg−1 s3 A2
m2 kg s−2 A−1
kg s−2 A−1
A/m
m2 kg s−2 A−2
cd sr
lm m−2
s−1
m2 s−2
= Ns
= N/m2
= Nm
= J/s
= Nm
= Nm
= J/K
=
=
=
=
=
=
J/C
C/V
V/A
A/V
Vs
Wb/m2
= Vs/A
= J/kg
B.2.2
Verschiedene Einheiten
Grösse (Symbol)
SI
Einheit
Länge (l)
1m
Fäche (A)
1 m2
Volumen (V)
1 m3
Zeit (t)
1s
Frequenz ν
1 Hz
Geschwindig. (v)
1 m/s
Masse (m)
1 kg
Kraft (F)
1N
Druck (p)
1 Pa
Arbeit (W)
Energie (E)
Wärme(Q)
1J
Leistung (P)
1W
Magn. Indukt. (B)
Magn. Feld (H)
1T
1 A/m
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
Parsec = 1 pc = 3.085 72 ×1016 m
Lichtjahr = 1 ly = 9.460 530 ×1015 m
astr. Einheit = 1 AE = 1.496 00 ×1011 m
inch = 1 in. = 2.54 cm (exakt)
yard = 1 yd. = 3 feet = 3 ft.= 36 in.
Seemeile = 10 Kabel = 1000 Faden = 1852 m
mile = 1 mi. = 1760 yd. = 1.609 344 km
Ångström = 1 Å = 10−10 m
Fermi = 1 fm = 10−15 m
Are = 1 a = 102 m2
Barn = 1 b = 10−28 m2
Liter = 1 l = 10−3 m3
Gallone (US) = 4 Quarts = 8 Pints = 3.785 4 l
Gallone (GB) = 4 Quarts = 8 Pints = 4.545 9631 l
d = 24 h = 86400 s
Jahr = 1 y = 3.155 69 ×107 s ≈ π × 107 s
cycle per second = 1 cps = 1 Hz
revolution per minute = 1 rpm = 1/60 Hz
km/h = 1/3.6 m/s
Knoten = 1 Seemeile/h
mile per hour = 1 mph = 1.609 344 km/h
techn. Masseneinh. = 1 TME = 1 kp m−1 s2 = 9.806 65 kg
atomare Masseneinheit = 1 u = 1.660 5655(86) ×10−27 kg
pound = 1 lb = 16 ounces = 16 oz. = 0.453 59237 kg
dyn = 1 cm g s−2 = 10−5 N
Kilopond = 1 kp = 1 kg∗ = 9.806 65 N
Bar = 1 b = 103 mb = 105 Pa
Atmosphäre (phys.) = 1 atm = 1.013 25 ×105 Pa
Atm. (techn.) = 1 at = 1 kp/cm2 = 0.980 665 ×105 Pa
Pound per sq. in. = 1 PSI = 6.894 76 ×103 Pa
Torr = 1/760 atm = 133.322 37 Pa = 1 mm Hg (0 ◦ C)
Erg = 1 erg = 10−7 J
kWh = 3.6 ×106 J
cal (thermoel.) = 4.184 J
cal (mittlere) = 4.186 97 J
cal (15 ◦ C) = 4.185 5 J
cal (IT) = 4.186 84 J
eV = 1.602 1892(46) ×10−19 J
Pferdestärke = 1 PS = 75 m kp/s = 735.498 75 W
horse power = 1 hp (mech.) = 550 ft lb/s = 745.692 27 W
hp (elektr.) = 746 W
Gauss = 1 G = 10−4 T
Oersted = 103 /4π A/m
92
B.2.3
B.3
Vorsilben der Dezimalteilung von Einheiten
Vorsilbe
Abk. Faktor Vorsilbe
Exa
Peta
Tera
Giga
Mega
Kilo
Hekto
Deka
E
P
T
G
M
k
h
d
1018
1015
1012
109
106
103
102
101
Dezi
Zenti
Milli
Mikro
Nano
Piko
Femto
Atto
Abk. Faktor
d
c
m
µ
n
p
f
a
10−1
10−2
10−3
10−6
10−9
10−12
10−15
10−18
spezielles
nur dl, dm
nur cm
1 fm=1 Fermi
Astronomische Daten
Erde
1 mittl. Sonnentag
1 Sterntag
1 tropisches Jahr
1 siderisches Jahr
mittl. Radius
Masse
mittl. Dichte
mittl. Entfernung von der Sonne
1 d = 86400 s
86 164.09 s
1 y = 365.242 20 d
365.256 36 d
6 371.0 km
5.976 ×1024 kg
5 517 kg/m3
1.496 ×1011 m = 1 astr. Einheit = 1 AE
Mond
Masse
Radius
Entfernung von der Erde
siderische Umlaufszeit
synodische Umlaufszeit (Neumond)
7.35 ×1022 kg = 1/81.3 mE
1 738.2 km
384 400 km (356 400 . . . 406 700 km)
27.321 661 d
29.530 558 d
Sonne
Radius
Masse
Oberflächentemperatur
695 990 km = 109.24 RE
1.989 ×1030 kg = 3.328 3 ×105 mE
5770 K
Milchstrasse
Durchmesser
Dicke
Sonne-Zentrum
Masse
80 000 Ly
6 000 Ly
32 000 Ly
1.4 ×1011 mS
93
C
Mathematische Hilfsmittel
C.1
Mathematische Formelsammlung
C.1.1
r
½
½
½α
½
Trigonometrie
sin α = y/r
csc = r/y
cos α = x/r
sec = r/x
tan α = y/x
cot = x/y
sin2 α + cos2 α = 1
½
½
y
x
sin(α ± β) = sin α cos β ± cos α sin β,
´
³
´
α±β
cos α∓β
³ 2 ´
³ 2 ´
α−β
cos β=2 cos α+β
cos
³ 2 ´
³ 2 ´
sin α−β
cos β=2 sin α+β
2
2
√
sin α ± sin β=2 sin
cos α +
³
cos(α ± β) = cos α cos β ∓ sin α sin β
cos α −
a cos α + b sin α=A · sin(α + δ), A = √a2 + b2 , tan δ = ab oder
a cos α + b sin α=A · cos(α − δ ′ ), A = a2 + b2 , tan δ ′ = ab
C.1.2
−1
Komplexe Zahlen
iϕ
z=a
ϕ) √
√+ ib = ρ exp(iϕ) = ρ e = ρ (cosn ϕ + ni sin
√
iϕ/n
2
2
, z = ρ eiϕ/2
ρ = a + b = |z|, tan ϕ = b/a, z = ρ e
ℑ{z}
6
da | eiϕ |2 = eiϕ · e−iϕ = e0 = 1 liegt eiϕ auf dem Einheitskreis.
b
i ρ ½
>
'$
Geometrische Deutung: ℜ{z} = ρ cos ϕ, ℑ{z} = ρ sin ϕ
½z
½
exp(iϕ) = cos ϕ + i sin ϕ,
exp(−iϕ) = cos ϕ − i sin ϕ ⇒
- ⇒
½ϕ
ℜ{z}
&%
1
a
−i
cos ϕ =
exp(iϕ) + exp(−iϕ)
a
= ,
2
ρ
sin ϕ =
exp(iϕ) − exp(−iϕ)
b
=
2i
ρ
exp(iπ/2) = eiπ/2 = i, exp(iπ) = eiπ √
= −1,
√
n
n inϕ
n
z = ρ e = ρ (cos nϕ + i sin nϕ),
z = ρ eiϕ/2 ,
z̄ = a − ib ist√das konjugiert
komplexe (auch z ∗ ) zu z = a + ib,
√
2
2
Betrag |z| = z z̄ = a + b
C.1.3
Hyperbolische Funktionen
sinh x = exp(x)−exp(−x)
,
2
sinh2 x − cosh2 x = −1,
C.1.4
cosh x = exp(x)+exp(−x)
2
sinh x
tanh x = cosh
x
Inverse Funktionen
sin[arcsin(x)] = x,
ln[exp(x)] = x
cos[arccos(x)] = x,
etc.
sinh[arcsinh(x)] = x,
94
cosh[arccos(x)] = x
C.1.5
Ableitungen und unbestimmte elementare Integrale
Für unbestimmte Integrale
muss eine Konstante
c berücksichtigt werden.
R
R
Partielle Integration: u dv = u v − v du
R
d
f (x) dx
f (x)
f (x)
dx
Z
x
n
d n
x = nxn−1
dx
Z
xn+1
x dx =
, n 6= −1
n+1
x
−1
d −1
x = −x−2
dx
Z
x−1 dx = ln x
ln x
d
ln x = x−1
dx
Z
ln xdx = x ln x − x
ex
d x
e = ex
dx
Z
ex dx = ex
sin x
d
sin x = cos x
dx
Z
sin xdx = − cos x
cos x
d
cos x = − sin x
dx
Z
cos xdx = sin x
tan x
x
d
tan x =
dx
cos2 x
Z
tan xdx = − ln cos x
cot x
d
x
cot x = − 2
dx
sin x
Z
cot xdx = ln sin x
Z
a2
Z
a2
√
1
dx
= arctan(x/a)
2
+x
a
dx
1
= arctanh(x/a)
2
−x
a
dx
x
=
arcsin
|a|
a2 − x 2
Ã
Z
1
a+
dx
√
=
−
ln
|a|
x a2 ± x 2
Z √
Z
√
n
x 2 ± a2 =
oder =
1
a+x
ln
, (a2 > x2 )
2a a − x
oder = − arccos
√
a2 ± x 2
x
x
, (a2 > x2 )
|a|
!
i
√
1h √ 2
x x ± a2 ± ln(x + x2 ± a2 )
2
√
dx
=
ln(x
+
x 2 ± a2 )
x 2 ± a2
95
C.1.6
Einige bestimmte Integrale,
die nicht als unbestimmte Integrale angegeben werden können.
Z∞
Z∞
n!
dx
√
, n = 0, 1, 2 . . . , p > 0
t p dt
=
n+1
(ln p)
(1 + x) x
0
0
π
a
>
0
Z∞
Z∞
2
a dx
sin mx dx
a=0
= 0
2
2
a +x
x
π
0
0
−
a<0
2
Z∞
Z∞
sin2 (px) dx
πp
sin2 (mx) dx
=
2
x
2
n −t
0
π/2
Z
0
Zπ
dx
a + b cos x
0
Z∞
e−ax dx
=√
=
0
Z∞
2
x e−x dx
0
Z1
0
1
,
a
0
Z∞
1
2
π
dx
=
2
2
2ab
sin x + b cos x
e−a
2
2 x2
1√
π
2a
√
π
=
4
√
π
=
2
dx
=
2
x2 e−x dx
0
ln x
dx
1+x
2
=−
a2
π
2
= 0
π
−
2
π
=
2
0
Z∞
= (−1)n · n!
C.1.7
a>b≥0
a>0
(ln x)n dx
0
Z1
=
π
,
− b2
a2
=π
Z1 q
ln 1/x dx
0
Z1
π
12
0
ln x
dx
1 − x2
=−
π2
8
Reihenentwicklungen
′
Taylor-Reihe: f (x) = f (x◦ )+f (x◦ )
exp(x) =
sin(x) =
tan(x) =
sinh(x) =
2
(x − x◦ )2
(x − x◦ )1
′′
+f (x◦ )
+· · · mit 0 ≤ (x−x◦ ) < 1
1!
2!
3
ex = 1 + x + x2! + x3! + · · ·
5
3
x − x3! + x5! − + · · ·
5
3
x + x3 + 2 x15 + · · ·
3
5
x + x3! + x5! + · · ·
(1 + x)n =
1
=
√ 1+x
1+x=
√1
=
1+x
ln(1 − x) =
cos(x) =
cot(x) =
cosh(x) =
2
x − x2!
2
1 − x2!
2
1 − x2
2
1 + x2!
x2 + n(n−1)(n−2)
x3 + · · ·
1 + nx + n(n+1)
2!
3!
1 − x + x2 − x3 + · · · , (−1 < x < 1)
2
3
1 + x2 + x8 + x16 + · · · , (−1 < x < 1)
2
3
+ · · · , (−1 < x < 1)
1 − x2 + 3x8 − 5x
16
96
3
+ x3!
4
+ x4!
4
+ x4
4
+ x4!
− +···
− +···
− +···
+ ···
m>0
m=0
m<0
C.2
Zusammenstellung von Differentialgleichungen in Physik A
Differentialgleichung
Lösung
1. y ′′ = a
y = 12 ax2 + C1 x + C2
2. y ′′ + ωy ′ = 0
y = C1 e−ωt + C2
3. y ′′ + ωy ′ = g
y = C1 e−ωt + C2 +
4. y ′ + ωy = g
y = C1 e−ωt +
5. y ′′ + ω 2 y = g
y = y0 cos(ωt − δ) +
6. y ′′ − y = cos x
y = C1 ex + C2 e−x − 12 cos x
′
7. y ′′ + 2λy
+ α2 y = 0
q
ω = + |λ2 − α2 |
8. y ′′ + 2λy ′ + α2 y = f (t)
benutze :
Ansatz :
damit :
Einsetzen in Dgl. :
zusammenfassen :
also :
9. x2 y ′′ + xy ′ − k 2 y = 0
g
ω
·t
g
ω
g
ω2
λ > α y = e−λt (C1 eωt + C2 e−ωt )
λ < α y = e−λt (C1 eiωt + C2 e−iωt )
λ = α y = e−λt (A + Bt)
R
R
= f (x, x) + 0x ∂f
(x, y)dy
F (x) = 0x f (x, y)dy ⇒ dF
dx
∂x
Rt
y = 0 g(t − τ )f (τ )dτ
R
y ′ = g(0)f (t) + 0t g ′ (t − τ )f (τ )dτ
R
y ′′ = g(0)f ′ (t) + g ′ (0)f (t) + 0t g ′′ (t − τ )f (τ )dτ
R
g(0)f ′ (t) + g ′ (0)f (t) + 0t g ′′ (t − τ )f (τ )dτ + 2λg(0)f (t)
R
Rt ′
+2λ 0 g (t − τ )f (τ )dτ + α2 0t g(t − τ )f (τ )dτ = f (t)
g(0)f ′ (t) + [g ′ (0) + 2λg(0) − 1] f (t)
R
+ 0t [g ′′ (t − τ ) + 2λg ′ (t − τ ) + α2 g(t − τ )] f (τ )dτ = 0
Diese Gleichung wird erfüllt, wenn g(t − τ )
die Dgl. 8. erfüllt mit den Anfangsbedingungen
g(0) = 0 und g ′ (0) = 1
λ>α y=
λ<α y
y
λ=α y
y
=
=
=
=
1
2ω
Rt
³
´
e−λ(t−τ ) eω(t−τ ) − e−ω(t−τ ) f (τ )dτ
0
³
´
i R t −λ(t−τ )
eiω(t−τ ) − e−iω(t−τ ) f (τ )dτ
− 2ω 0 e
1 R t −λ(t−τ )
e
sin ω(t − τ )f (τ )dτ
Rωt 0 −λ(t−τ )
e
(t
−
τ )f (τ )dτ
0
k
−k
C1 x + C2 x
97
C.3
Vektorgleichungen
Skalarprodukt
~
~a · b = ax bx + ay by + az bz
~a(~b · ~c)
~a · (~b × ~c)
~a × (~b × ~c)
~
(~a × ~b) · (~c × d)
∇ × ∇ψ
∇ · (∇ × ~a)
(∇ · ∇)ψ
∆~a
∇ × (∇ × ~a)
∇ · (ψ~a)
∇ × (ψ~a)
∇(~a · ~b)
∇ · (~a × ~b)
∇ × (~a × ~b)
Vektorprodukt
~
~a × b = ~ex (ay bz − az by )
~ey (az bx − ax bz )
~ez (ax by − ay bx )
=
=
=
=
=
=
=
=
=
=
=
=
=
=
Tensorprodukt
~
~a ⊗ b = ax bx ax by ax bz
ay b x ay b y ay b z
az b x az b y az b z
(~a ⊗ ~b)~c
~b · (~c × ~a) = ~c · (~a × ~b)
(~a · ~c)~b − (~a · ~b)~c
~ − (~a · d)(
~ ~b · ~c)
(~a · ~c)(~b · d)
0
0
∇ · (∇ψ) = ∆ψ
∇ · (∇~a) − ∇ × (∇ × ~a)
∇ · (∇~a) − ∇2~a = ∇ · (∇~a) − ∆~a
~a · ∇ψ + ψ∇ · ~a
∇ψ × ~a + ψ∇ × ~a
(~a · ∇)~b + (~b · ∇)~a + ~a × (∇ × ~b) + ~b × (∇ × ~a)
~b · (∇ × ~a) − ~a · (∇ × ~b)
~a(∇ · ~b) − ~b(∇ · ~a) + (~b · ∇)~a − (~a · ∇)~b
Ist ~x die Koordinate eines Punktes in Bezug auf einen Ursprung mit dem Betrag r = |~x|
und ~n = ~x/r der Einheitsradiusvektor, dann gilt
∇ · ~x = 3
∇ × ~x = 0
2
∇ · ~n = r
∇ × ~n = 0
~
a
1
⊥
(~a · ∇)~n = r [~a − ~n(~a · ~n)] ≡ r
C.4
Theoreme aus der Vektorrechnung
~ skalare oder Vektor-Funktionen, V ist ein dreidimensioIm folgenden sind Φ, Ψ, und A
nales Volumen mit dem Volumenelement d3 x. S ist eine zweidimensionale, geschlossene
Oberfläche des Volumens V mit dem Flächenelement da und der nach aussen zeigenden
Normalen ~n auf da.
R
V
R
V
~ 3x =
∇ · Ad
R
∇Ψd3 x =
S
R
(Φ∇2 Ψ + ∇Φ · ∇Ψ)d3 x =
S
R
R
V
R
V
R
V
~ 3x =
∇ × Ad
(Φ∇2 Ψ − Ψ∇2 Φ)d3 x =
S
R
S
R
S
~ · ~nda
A
Divergenz Theorem
ψ~nda
~
~n × Ada
Φ~n · ∇Ψda
(Φ∇Ψ − Ψ∇Φ) · ~nda
98
Green’s 1. Identität
Green’s Theorem
Im folgenden ist S eine offene Fläche und C eine sie einschliessende Kontur mit dem
Linienelement d~ℓ. Die Normale ~n zu S ist durch die rechte Hand-Regel in bezug auf das
Linienintegral um die Kontur C definiert.
R
S
~ · d~ℓ Stoke’s Theorem
~ · ~nda = H A
(∇ × A)
R
S
C.5
C
~n × ∇Ψda =
H
Ψd~ℓ
C
Explizite Formen von Vektoroperationen
Mit den orthogonalen Einheitsvektoren ~e1 , ~e2 , ~e3 , die den gewählten Koordinaten entspre~ gilt für den Nabla-Operator ∇
chen und den Komponenten A1 , A2 , A3 von A
∇Ψ =
~=
∇·A
~=
∇×A
∇2 Ψ =
Kartesische Koordinaten x1 , x2 , x3 = ~x = x, y, z
∂Ψ + ~e ∂Ψ + ~e ∂Ψ
~e1 ∂x
2
3
∂x2
∂x3
1
∂A1 + ∂A2 + ∂A3
∂x1
∂x2
∂x3
∂A
∂A3
∂A2 ∂A1
∂A
2
1
3
~e1 ( ∂x − ∂x ) + ~e2 ( ∂A
∂x3 − ∂x1 ) + ~e3 ( ∂x1 − ∂x2 )
2
3
∂2Ψ + ∂2Ψ + ∂2Ψ
∂x21
∂x22
∂x23
Zylinder Koordinaten ρ, ϕ, z
1 ∂Ψ
∂Ψ
∇Ψ = ~e1 ∂Ψ
∂ρ + ~e2 ρ ∂ϕ + ~e3 ∂z
~ = 1 ∂ (ρA1 ) + 1 ∂A2 + ∂A3
∇·A
ρ ∂ρ
ρ ∂ϕ
∂z
∂A
∂A1 ∂A3
∂A
1 ∂(ρA2 ) ∂A1
1
2
3
~ = ~e1 (
∇×A
ρ ∂ϕ − ∂z ) + ~e2 ( ∂z − ∂ρ ) + ~e3 ρ ( ∂ρ − ∂ϕ )
∂ (ρ ∂Ψ ) + 1 ∂ 2 Ψ + ∂ 2 Ψ
∇2 Ψ = ρ1 ∂ρ
∂ρ
ρ2 ∂ϕ2
∂z 2
Kugel Koordinaten r, ϑ, ϕ
1 ∂Ψ
1 ∂Ψ
∇Ψ = ~e1 ∂Ψ
∂r + ~e2 r ∂ϑ + ~e3 rsinϑ ∂ϕ
∂ (sinϑA ) + 1 ∂A3
~ = 12 ∂ (r2 A1 ) + 1
∇·A
2
∂r
r
sinϑ
∂ϑ
r sinϑ ∂ϕ
r
·
¸
∂A
1
∂
2
~ = ~e1
∇×A
r sinϑ ∂ϑ (sinϑA3 ) − ∂ϕ +
·
¸
·
1 ∂A1 − 1 ∂ (rA ) + ~e 1 ∂ (rA ) − ∂A1
+~e2 r sinϑ
3
3r
2
r ∂r
∂ϕ
∂r
∂ϑ
2
∂
∂
Ψ
∂
1
∂Ψ
1
1
2 ∂Ψ
2
(sinϑ ∂ϑ ) + 2
∇ Ψ = 2 ∂r (r ∂r ) + 2
r
r sinϑ ∂ϑ
r sin2 ϑ ∂ϕ2
2
2
∂ (r2 ∂Ψ ) ≡ 1 ∂ (rΨ) = ∂ (Ψ) + 2 ∂ (Ψ)
mit 12 ∂r
r ∂r2
r ∂r
∂r
r
∂r2
¸
Es werden auch folgende Schreibweisen benutzt:
gradΨ = ∇Ψ
~ =∇·A
~
div A
99
~ =∇×A
~
rotA
∇2 = ∆
Index
Driftkammer, 44
χe , 23
χm , 58
µ, 57
µ0 , 47
ε, 23
ε◦ , 4
Effekt
Barkhausen, 60
Hall, 35, 54
Effektivwert, 83
Eigenleitung von Halbleitern, 37
Einheit, 87
Elektrische Ladung, 1
Elektrisches Feld, 4, 56
An Grenzflächen, 25
Energie, 27
Energiedichte, 27
In Leitern, 15
Elektrolyte, 41
Elektromagnete, 61
Elektromagnetische Wellen, 74
Elektromotorische Kraft, 33
Elektronenbeschleuniger, 68
Elektronenmasse, 53
Elektronenröhrengenerator, 78
Elektrostatisches Potential, 5
Elementarladung, 1, 19
Elementarteilchen, 2
EMK, 33
Erde
Magnetfeld, 53
Experiment
Elektronenmasse, 53
Elementarladung, 19
Faraday’sches, 16
Millikan, 19
Thomson-Waage, 29
Akzeptoren, in Halbleitern, 37
Ampère, Gesetz von, 48
Anionen, 41
Äquipotentialfläche, 15
Astronomische Daten, 93
Austrittsarbeit, 44
Axialvektor, 49
Bändermodell, 37
Bandstruktur, 38
Barkhausen-Effekt, 60
Betatron, 68
Beweglichkeit, 35
Biot-Savart, Gesetz von, 47
Brechungsgesetz, 25
Cb, 3
Clausius-Masotti, Formel von, 26
Coulomb’sches Gesetz, 3
Curie-Temperatur, 60
Detektor
Germanium, 39
Silizium, 39
Diamagnetismus, 59
Dielektrikum, 21, 29
~ 23
Dielektrische Verschiebung D,
Dielektrizitätskonstante, 23, 26
Dipol
Elektrischer, 20
Energie, 30
Magnetischer, 46
Energie, 60
Dipolmoment
Elektrisches, 22
Magnetisches, 52
Dissoziation, elektrolytische, 41
Donatoren, in Halbleitern, 37
Dotieren von Halbleitern, 37
Farad, 18
Faraday’sches Becherexperiment, 16
Faraday’sches Induktionsgesetz, 66
Faradaykäfig, 16
Faradayzahl(F), 42
Feldlinien, 11
Differentialgl. der, 11
eines Dipols, 12
mit Gaussschem Satz, 13
mit konforme Abb., 14
Ferromagnetismus, 59
Flipspule, 71
100
Kondensator, 18, 74, 75
Impedanz, 79
mit Dielektrikum, 21
Konstanten, 86
Kontinuitätsgleichung, 32
Kugelsymmetrische Ladungsverteilung,
10
Flussregel, 9
Freies-Elektronengas-Modell, 35
Funkenkammer, 43
FWHM, 81
Galvanometer, 70
Gauss’scher Satz, 24
Geigerzähler, 43
Generator, 68
Leistung, 82
Gesetz von
Ampère, 48
Biot-Savart, 47
Clausius-Masotti, 26
Coulomb, 3
Faraday (Induktion), 66
Kirchhoff, 33
Lenz, 66
Ohm, 35
Paschen, 42
Richardson, 44
Gleichspannungsgenerator, 70
Glimmentladung, 42
Glimmlampe, 75
Gravitationskraft, 4
L, Koeffizient der Selbstinduktion, 72
Ladungsdichte, 8
Ladungserhaltung, 31
Leiter, Elektrische, 14, 34
Leitfähigkeit, 31, 35
Leitungsband, 38
Lenz’sche Regel, 66
Lichtbogen, 78
Lorentzkraft, 45, 56
Magnetfeld
An Grenzflächen, 61
Energie, 73
Energiedichte, 73
Messung, 71
~ 47
Magnetfeld H,
~ 45, 56
Magnetische Induktion (B),
~ , 58
Magnetisierung M
Maschenregel, 34
Masse und Ladung, 2
Mathematische Hilfsmittel, 94
Maxwell Gleichungen, 10, 24, 46, 49, 66,
84
Maxwell Gleichungen, Übersicht, 84
Mechanik und Selbstinduktion, 73
Millikan, Öltropfchenversuch, 19
Motor, elementarer, 67
Halbleiter, 36
Halbleiterdiode, 38
Hall-Effekt, 35, 54
Handregel, rechte, 45
Henry, 72
Hysterese, 60
Impedanz, 79
Induktion zweier Leiter, 71
Induktionsgesetz, 65
Induktionskonstante µ0 , 47
Influenz, 16
Influenzkonstante ε◦ , 4
Ionisation durch Stösse, 42
Ionisationskammer, 43
Isolator, 21
Nichtpolare Moleküle, 26
Ohm’scher Widerstand, 32
Ohm’sches Gesetz, 35
Parallelschaltung, 81
Kondensator, 18
Widerstände, 34
Paramagnetismus, 59
Paschen, Gesetz von, 42
Permanentmagnete, 62
Permeabilität µ, 57
Photomultiplier, 44
Poisson Gleichung, 11
Kapazität, 18
Kationen, 41
Kennlinie, 36
Kirchhoff’sche Regeln, 33
Knotenregel, 34
Koaxialleiter, 7
101
Tunneldiode, 39
Polare Moleküle, 27
Polarer Vektor, 49
Polarisation, dielektrische, 22
Potential, 5
Proportionalzähler, 43
Protonenmasse, 54
Punktladung, Feld und Potential, 6
Unipolarmaschine, 69
Vakuumröhren, 44
Valenzband, 38
Van de Graaff Generator, 17
Vektor
Axialer, 49
Polarer, 49
Vektorpotential, 50
Verschiebungsstrom, 83
Quanten-Hall-Effekt, 55
Rechte Handregel, 45
Remanenz, 60
Richardson-Gleichung, 44
Rückkopplung, 78
Wechselspannungsgenerator, 68
Wechselstrom, 74, 79
Leistung, 82
Wechselstromwiderstand, 79
Wideroe’sche Betatron-Bedingung, 69
Widerstand, 74
Elektrischer, 32
Innerer, 33
Negativer, 78
Ohmscher, 79
Spezifischer, 35
Wien-Filter, 54
Wirbelfeld, 49
Wirbelströme, 71
Bremse, 71
Wirkleistung, 83
Sägezahnschwingung, 75
Satz von
Gauß, 24
Scheinleistung, 83
Schwingkreis, 77
Selbstinduktion, 72, 73, 79
Koeffizient L, 72
Serieschaltung, 80
Kondensator, 19
Widerstände, 34
SI-Einheiten, 90
Solarzelle, 39
Solenoid, 52, 55
Spannung, 5, 31
Spiegelladung, 21
Spule, 62, 73, 74, 76, 79
Sromkreis, 33
Störstellenleitung in Halbleitern, 37
Strom-Spannungscharakteristik, 36
Stromdichte, elektrische, 31
Stromstärke, elektrische, 32
Superpositionsprinzip, 7
Supraleitung, 36
Suszeptibilitat
Elektrische χe , 23
Magnetische χm , 58
Zündspannung, 42
Zündung beim Auto, 76
Zyklotronfrequenz, 55
Thermoemission von Elektronen, 44
Thomson’sche Waage, 29
Thomson-Formel, 77
Thomson-Schwingkreis, 77
Transformator, 81
Transistor, 40
Triode, 44
102



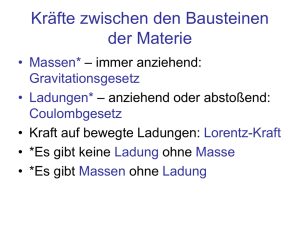
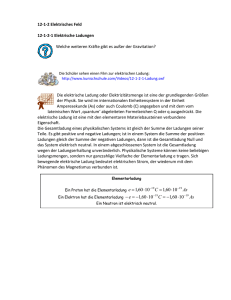

![Elektrische Spannung U [V]](http://s1.studylibde.com/store/data/002479720_1-141ad09aa3ab46fc5af48362f775ec08-300x300.png)