Schaltungstechnik 1
Werbung

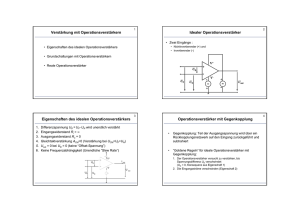
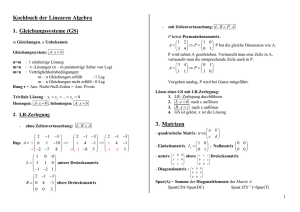
4 ei * 2. Netzwerktheorie Schaltungstechnik 1 • Implizite Darstellung: fF (u, i) = 0 • Parameterdarstellung: u = uF (λ) i = iF (λ) • Explizite Darstellung: i = gF (u) u = rF (i) 2.1. Kirchhoff-Gesetze * kann Spuren von Katzen enthalten nicht für Humorallergiker geeignet alle Angaben ohne Gewehr Konzentriertheitshypothese: d << λ mit d = Größe der Schaltung, Wellenlänge λ = cT Wichtiger Hinweis Diese Formelsammlung ist noch in der Entwicklung und nicht Prüfungstauglich ! Allerdings würden wir uns über Unterstützung freuen das zu ändern. Wer Lust hat kann uns über das Kontaktformular auf www.latex4ei.de erreichen. 1. Grundlagen 2 1.1. Sinus, Cosinus sin (x) + cos (x) = 1 x 0 π/6 π/4 π/3 ϕ 0◦ 30◦ 45◦ sin 0 cos 1 1 √ 2 1 √ 2 tan 0 1 2 √ 3 2 √ 3 3 60◦ √ 3 2 1 2 1 √ 3 11 π 2 1π 2 90◦ 180◦ 270◦ 360◦ 1 0 −1 0 0 −1 0 1 ±∞ 0 ∓∞ 0 π Leitwertdarstellung Stromgesetz KCL Spannungsgesetz KVL Kirchoff’s Current Law Kirchoff’s Voltage Law 2π Verbraucherpfeilsystem: Spannung und Strom sind assoziiert. Positive Leistung bedeutet Leistungsaufnahme oder Verbrauch von Leistung. Negative Leistung bedeutet Leistungsabgabe oder Erzeugung von Leistung. Das Gegenteil wäre das Erzeugersystem. In den meisten Fachgebieten wird im Verbrauchersystem gerechnet. 1.2. Begriffserklärung, Glossar Zählpfeile: Zeigen die gemeinsame(assoziierte) Zählrichtung von Stromfluss und Spannungsabfall zwischen zwei Knoten an, unabhängig von den tatsächlichen Richtungen (Vorzeichen). Masse (Signale) ⊥: Gemeinsamer el. Bezugspunkt mit Potential 0V Erdung (Fehlstrom): Schutz vor Kurzschluss, führt nur im Fehlerfall Strom. Kurzschluss (KS): ideal leitender Draht. uKS = 0, iKS = beliebig Leerlauf (LL): ideal isolierende Luft. uLL = beliebig, iLL = 0 Tor: Ein Tor bilden zwei Anschlüsse bei denen der Stromzufluss des einen Anschluss gleich dem Stromabfluss des anderen Anschluss entspricht. iin = iout Arbeitspunnkt (AP): Betriebspunkt bei dem alle Kleinsignalquellen Null sind. Leerlauf Widerstandsdarstellung • Umpolung: F entsteht durch Punktspiegelung von F am Unsprung: (u, i) = (−u, −i) ∈ F • Dualität: (u, i) ∈ F ⇔ (Rd i, Ru ) ∈ F d Kurzschluss d Knotenregel X ik (t) = 0 Maschenregel X um (t) = 0 Knoten Masche • Parallelschaltung von Widerstandsgeraden: G = G1 + G2 rausfließende Ströme positiv Maxwell: div j = 0 (n − 1) Gleichungen 2 3. Resistive Eintore 2.5. Resistive Eintore Spannungen in Umlaufrichtung positiv Maxwell: rot E = 0 b − (n − 1) Gleichungen α11 ... α1b . Knoteninzidenzmatrix: A0 = . n Knoten . e αn1 ... αnb Spaltensummen von A0 sind immer = 0 ⇒ Zeile des Bezugsknotens streichen ⇒ Ai = 0 (reduzierte Knoteninzidenzmatrix) e 0 0 0 M = A > mit u = M uk ⇒ KVL in Matrixform: u − A> uk = 0 e e f f R R 1 = 1 1 ⇒ R + R ⇒ R = R1 k R2 = R 1+R2 R1 2 1 2 • Serienschaltung von Widerstandsgeraden: genauso wie Parallelschaltung nur R statt G • Arbeitspunkt ermitteln: 1. Schaltungs aufteilen in Quelle Q und Last L 2. Parameterdarstellung ⇒ Kennlinien zeichnen 3. Lösung: Schnittpunkte der Kennlinien! ⇒ ist die Funktion im AP stetig und diffbar, kann man sie dort linearisieren Eigenschaften von F : F F F F F ungepolt aktiv verlustfrei quellenfrei streng linear Kennlinie punktsymm. zum Ursprung mind. 1 Pkt. in II. od. IV. Quadr. nur auf Koordinatenachsen enthält den Ursprung (ku, ki) ∈ F (u1 + u2 , i1 + i2 ) ∈ F u i u=0 i = beliebig u, sl, v u i Nullator Norator u=0 i=0 u, sl, v, dual zu sich selbst u i u = beliebig i = beliebig u u, sl, a, dual zu sich selbst i Widerstand u=R·i i=G·u G u 1 G= R R i Spannungsq. u = U0 i = beliebig 2.2. Schaltung und Netzwerkgraph Der gerichtete Netzwerkgraph stellt die Verbindungsstruktur einer Schaltung durch n Knoten (node) und b Verbindungskanten (branch) mit Richtungspfeilen dar. Jedes Bauelement mit zwei Anschlüssen entspricht einer Verbindungskante. Ein Knoten ist dort, wo ein oder mehr Anschlüsse von Bauteilen durch ideal leitenden Draht miteinander verbunden sind. Verbundene Anschlüsse entsprechen einem Kurzschluss, nicht verbundene Anschlüsse einem Leerlauf! Um die Betriebspunkte einer Schaltung zu bestimmen sind 2b linear unabhängige Gleichungen nötig. Man erhält diese 2b Gleichungen aus den Beschreibungen der Bauelemente und den Kirchoff Gleichungen. i u = beliebig i=0 u, sl, v u Stromquelle I0 u = beliebig i = I0 ideale Diode reale Diode 2.3. Eintorverschaltungen U0 i u i u=0 i=0 falls i > 0 falls u < 0 u i uD = uT · ln ID + 1 S u iD = IS · exp UD − 1 i u T Serienschaltung P u= ui q = const. P R= Ri 1 = P 1 C C i Z = P Zi 1 R Parallelschaltung i = const. P ΦM = ΦM,i P M = Mi P L= Li u = const. P q= qi 1 = P 1 R Ri P C = Ci P i= ii ΦM = const. 1 = P 1 M Mi 1 = P 1 L L 1 Y 1 Z Y = = P 1 Yi = R1 + R1 1 2 ⇒ = i P 1 Zi P Yi Photodiode uD i = IS i ! e UT − 1 − iL IL u 4. Resistive Zweitore Ein Zweitor besteht aus zwei Eintoren. R ·R R = R1 k R2 = R 1+R2 1 2 2.4. Linearisierung Großsignal i = IAP + ∆i u = UAP + ∆u Kleinsignal ∆i = i − IAP ∆u = u − UAP ∂g (u) i ∆i ≈ G · ∆u G ist die Jakobimatrix ∂u j e e ∆u ≈ R · ∆u e Großsignal: i ≈ IAP + G(UAP ) · (u − UAP ) UAP Implizite Liniarisierung: ∆f (∆u, ∆i) = M ∆u + N ∆i ∂f ∂f f ∂f f ∂f1 1 1 1 ∂u ∂u2 ∂i2 N := ∂i1 M := ∂f 1 ∂f2 ∂f2 ∂f2 2 f f ∂u1 Homepage: www.latex4ei.de – Fehler bitte sofort melden. ∂u2 ∂i1 ∂i2 von LaTeX4EI - Mail: [email protected] Stand: 9. Februar 2016 um 17:35 Uhr 1 4.1. Beschreibungsformen von Zweitoren Beschreibung nicht linear Implizit fF (u, i) = 0 Parametrisch Explizit Widerstandbeschreibung Leitwertbeschreibung Hybridbeschreibung Inver. Hybridbeschreibung Kettenbeschreibung Inver. Kettenbeschreibung linear # h i u =0 MN · i f e # " # u U = e ·λ i I e u = uF (λ) i = iF (λ) nicht linear # # u1 r (i , i ) = 1 1 2 u2 r2 (i1 , i2 ) # # i1 g (u , u ) = 1 1 2 i2 g2 (u1 , u2 ) # # u1 h (i , u ) = 1 1 2 i2 h2 (i1 , u2 ) # # i1 h0 (u , i ) = 01 1 2 u2 h2 (u1 , i2 ) # # u1 a (u , −i2 ) = 1 2 i1 a2 (u2 , −i2 ) # # u2 a0 (u1 , −i1 ) = 1 0 i2 a2 (u1 , −i1 ) 4.3.3 "Negativ-Immitanz-Konverter # −k 0 A= 1 0 k 4.4. NIK allgemein (Polung beachten) I II i R0 # = = = = = = # U0 i +R 1 e i2 U0 # # I0 u +G 1 e u2 I0 # i H· 1 f u2 # u H0 · 1 g i2 # u2 A· e −i2 # u1 A0 · f −i1 4.2. Verschaltung von Zweitoren R1 RL u Bild II III B Usat u u Rin = i 1 = ü2 RL 1 Eigenschaften: verlustlos(ideal) 4.3.2 Gyrator Der Gyrator wandelt das an Tor 1 geschaltete Bauteil in das duale Bauteil an Tor 2 um. ube = UT ln i +1 b IS −R0 R1 uin Fin = F d A = 0 1 R2 R1 0 # Eigenschaften: streng linear, verlustlos für R1 = R2 Homepage: www.latex4ei.de – Fehler bitte sofort melden. uout = Differenzierer C uout uin R1 E R 1 + R0 uin uout = u 1 Integrierer Addierer R R C uout uin uout . 7.1. Idealer Operationsverstärker i=0 uout +Usat i=beliebig ud i1=0 Bedingung 0 ∈ F ; enthält den Ursprung (ku, ki) ∈ F (u1 + u2 , i1 + i2 ) ∈ F Kennlinie punktsymm. zum Ursprung F (u, i) = F (−u, −i) i2=beliebig ESB II streng linearer Bereich ud = 0 |uout | ≤ |Usat | ud<0 Usat uout i1=0 ud=0 i2=beliebig uout i1=0 i2=beliebig Leistung: P (t) = uT · i = u1 i1 + . . . + un in Passiv: ∀F (u, i) : P (t) ≥ 0 Kennlinie nur I. oder III. Quadrant Aktiv: ∃F (u, i) : P (t) < 0 Kennlinie im II. oder IV. Quadrant Verlustlos: ∀F (u, i) : P (t) = 0 Kennlinie nur auf Koordinatenachsen Merke: Alle Mehrtore die nur aus passiven Bauelementen(R,C,L,...) bestehen, sind selbst passiv! inkremental passiv: letztendlich passiv: ∃U, I > 0 ∀(u, i) ∈ F : (|u| > U ∨ |i| > I ⇒ ui > 0) Alle realen Bauteile sind letztendlich passiv, da sonst unendlich viel Energie entstehen würde. ud>0 Usat uout uout = − uin dt t0 NIK R uout uin uout uin u in uout = −UT ln R·I S uout = −R · IS exp RL uin UT u = −R 8. Allgemeine Analyseverfahren 8.1. Die Tableau-Gleichung ... beschreibt ein Netzwerk A e teilverhalten. T = 0 e e M f vollständig bezüglich Verschaltung und Bau 0 e B e N f 8.2. Knotenspannungsanalyse Yk e Knotenleitwertsmatrix ESB III t´1 Exponenzierer R ud {Usat ESB I Sättigungsbereich ud < 0 uout = −Usat Logarithmierer III II I uout 1 uout = − RC uout = −RC · uin · uk Spannungsvektor = iq Stromquellenvektor Vorgehen: 1. Nicht lineare Elemente linearisieren 2. Nicht spannungsgesteuerte Elemente (dual)wandeln 3. Aufstellen der Leitwertsmatrix Y k e 4. Bestimmung des Stromquellenvektors i q 9. Digitale Logik 9.1. CMOS Logik Komplementäre Logik durch pMos und nMos Transistoren auf einem Substrat. NOT (2 Trans.) NAND (4 Trans.) NOR (4 Trans.) VDD A A Z VDD A Y B VDD B B Y A GND " uin Spannung Der Operationsverstärker ist ein elektronischer Verstärker. 5.4. Leistungsbetrachtung 4.3.1 "Übertrager # (z.B. Transformator ü 0 A= 1 0 ü uout uin Sättigungsbereich ud > 0 Ein Bauelement ist von einer Größe gesteuert, wenn die jeweilige explizite uout = +Usat Beschreibung existiert. Stromgesteuert: u = R(i) Spannungsgestuert: i = G(i) Ladungsgesteuert: u = C −1 (q) Flussgesteuert: i = L−1 (Φ) 4.3. Liste von Zweitoren R0 7. Operationsverstärker (OpAmp) 5. Eigenschaften von Ein- und Mehrtoren Ein Mehrtor F (u, i) ist ... Resistiv: Gedächtnislos; nur von u und i abhängig Zeitvariant: Betriebsraum kann sich ändern Reziprok: Rezeprozität, Matrix transponierbar(r12=r21). Stärker: Symmetrie: r11=r22 Merke: Alle Mehrtore die nur aus R, L, C bestehen sind reziprok! R0 uin ic = βib 5.3. Steuerung Kette Inv: a0ges = a0F 2 · a0F 1 linear: A0ges = A02 · A01 e e e uce B T Ein Mehrtor heißt zeitvariant, wenn sich sein Betriebsraum mit der Zeit ändern kann, ansonsten ist es Zeitinvariant. Kette: ages = aF 1 · aF 2 linear: Ages = A1 · A2 e e e ube u ib = IS exp Ube − 1 5.2. Zeitvarianz linear: H 0ges = H 01 + H 02 f f f E ib uout = Linear: (ku, ki) ∈ F (u1 + u2 , i1 + i2 ) ∈ F (Kennlinie gerade) Streng Linear: linear + quellenfrei, (Gerade durch Ursprung) Hybrid Inv.: h0ges = hF 1 + h0F 2 uce R1 Nichtinvert. Verstärker C R0 5.1. Liniarität Hybrid: hges = hF 1 + hF 2 linear: H ges = H 1 + H 2 f f f C ib ube ic i R +R R u = − R0 RL · i −Usat < LR 1 u < Usat 1 L positive Sättigung ud > 0 ⇔ uout = Usat u = R0 i + Usat Nur für Eintore: ungepolt Serie: rges = rF 1 + rF 2 linear: Rges = R1 + R2 e e e III negative Sättigung ud < 0 ⇔ uout = −Usat u = R0 i − Usat linearer Bereich ud = 0 F quellenfrei F streng linear Parallel: gges = gF 1 + gF 2 linear: Gges = G1 + G2 e e e Umrechnung: –Usat –R R0 I Eigenschaft Es gibt sechs mögliche Verschaltungen. Verschaltung ic u Rin = i 1 = −k2 R −k2 R : negativer Widerstand(et voilà xD) 1 Eigenschaften: streng linear, aktiv linear Invertierender Verstärker 6.1. Emitterschaltung A GND B GND 6. Transistoren Ein Transfer Resistor ist ein elektronisch gesteuerter Widerstand zum verstärken bzw. schalten von Strömen. Eigenschaften: passiv, von LaTeX4EI - Mail: [email protected] Stand: 9. Februar 2016 um 17:35 Uhr 2 4 Merke: Ist das Mädchen brav, bleibt der Bauch konkav, hat das Mädchen Sex, wird der Bauch konvex. ei * Schaltungstechnik 2 * kann Spuren von Katzen enthalten nicht für Humorallergiker geeignet alle Angaben ohne Gewehr 10.3. Schaltungen ersten Grades Zustandsgleichung: Wichtiger Hinweis Diese Formelsammlung ist noch in der Entwicklung und nicht Prüfungstauglich ! Allerdings würden wir uns über Unterstützung freuen das zu ändern. Wer Lust hat kann uns über das Kontaktformular auf www.latex4ei.de erreichen. 10. Allgemeines ... beschreiben die Wirkungsweise von elektronischen Bauelementen. x(t) τ + x0 x∞ τ x 0.37 τ > 0 : System stabil τ < 0 : System instabil Lösung: 10.1. Die vier zentralen Größen u, i, q, Φ Größe . x(t) = − x t0 t0+ t t − t0 x(t) = x∞ + (x0 − x∞ ) exp − τ Mit Parameter aus ESB: C: x∞ = U0 (t), L: x∞ = I0 (t) 10.3.1 Helmholz / Thévenin ESB Definition Spannung Stromfluss Ladung Magn. Fluss R Potentialdifferenz. Richtung: Von hohem zu niedrigen Potential. Bewegte Ladung. Richtung: Bewegungsrichtung positiver Ladung. Grundeigenschaft von Materie. Es gibt positive und negative Ladung. Grundeigenschaften von elektr. magn. Feldern. U0 u i q Φ i . iC = −i [i] = A [q] = As = C u(t) = Φ(t) ´ Φ = Φ(t0 ) + tt u(τ )dτ 0 [u] = V [Φ] = V s = W b 0 . 10.1.2 Arten von Bauelementen Art Symbol iR iC iL Induktivität iM . iC = C · uC uC (t∞ ) = U0 Zeitkonstante: τ = R · C 10.3.2 Mayer / Norton ESB iL i Beschr. linear Beispiel fR (u, i) u = U0 + R · i fC (u, q) q = Q0 + C · u PN-Diode I0 Kondensator fL (i, Φ) Φ = Φ0 + L · i Spule fM (q, Φ) Φ = Φ0 + M · q Memristor uL = −u uR Resistivität Kapazität uC u 10.1.1 Allgemeine Zusammenhänge u, i, q, Φ Ladung und Strom beschreiben den Zustand der Materie. Spannung und magn. Fluss beschreiben den Zustand des elekt. magn. Feldes. i(t) = q(t) ´ q(t) = q(t0 ) + tt i(τ )dτ ic uC uL uM Memristivität 10.2. Komplexe Wechselstromrechnung . uL = L · iL iL (t∞ ) = I0 Vorraussetzung: lineares, eingeschwungenes System mit sinusförmiger Erx̂ regung x(t) = x̂ · cos(ωt + ϕ) Effektivwert X = √ 2 u G L uL . uL = L · iL Zeitkonstante: τ = G · L 10.4. Dynamischer Pfad d Differentialoperator: dt = iω Reeles Zeitsignal: x(t) = x̂ · cos(ωt + ϕx ) Effektiver Zeiger: Scheitel Zeiger: X = Xw + iXb = X exp(iϕx ) √ X̂ = 2X = X̂ exp(iϕx ) Kompl. Zeitsignal: x(t) = X̂ · eiωt = x̂ · ei(ωt+ϕx ) Phase: ϕx := arg X = arctan X b w X Z(jω) = R(jω) + jX(jω) Impedanz Resistanz i>0⇒ i<0⇒ i=0⇒ . u < 0 ⇒ u fällt . u > 0 ⇒ u steigt . u = 0 ⇒ GGP ∆t = t1 − t0 = τ ln U =Z·I Konduktanz I =Y ·U x(t0 ): Startwert, u>0⇒ u<0⇒ u=0⇒ . i < 0 ⇒ i fällt . i > 0 ⇒ i steigt . i = 0 ⇒ GGP x(t0 ) − x∞ x(t1 ) − x∞ x(t1 ): Zielwert, i ! t1 t t0 u x∞ : (gedachter) GGP Suszeptanz Kondensator Spule Memristor Z = R 1 jωC jωL M Y = 1 G= R jωC −π 2 1 jωL π 2 1 M 0 ϕu −ϕi iL stetig, uL springt . 1 · u(t) i(t) = − L Zeitdauer auf linearen Pfaden: Widerstand ∆ϕ = induktiv uC stetig, iC springt . 1 · i(t) u(t) = − C Reaktanz Y (jω) = G(jω) + jB(jω) Admittanz kapazitiv 10.5. Übertragungsfunktion ? Merke: Am Kondensator, eilt der Strom vor, bei Induktivitäten, wird er sich verspäten Homepage: www.latex4ei.de – Fehler bitte sofort melden. von LaTeX4EI - Mail: [email protected] Stand: 9. Februar 2016 um 17:35 Uhr 3 11. Lösen von homogenen DGLs 2. Ordnung λ1 = λ2 ∈ R . λ1 < λ2 λ1 6= λ2 ∈ R ⇒ q ,,schneller” 2 Matrix Λ x(t) = x0,1 · exp(λ1 t) · q + x0,2 · exp(λ2 t) · q 1 Eigenwerte Matrix Λ x=0 λ1 0 0 λ2 x=0 Name " λ 0 Portrait # 0 λ λ<0 stabil instabil q1 λ>0 " λ 0 instabil # 1 λ λ<0 0 0 0 λ2 # λ1 = 0, λ2 < 0 q1 λ>0 Kamm instabil −β α # α < 0, β 6= 0 stabil Strudel instabil Strudel qr qj 0 β Knoten 3 qr qj q1 −β 0 # α = 0, β 6= 0 Zeitverlauf immer von q instabil Knoten 3 q1 j nach q r stabil bzw. von q Wirbel r nach −q qr j q1 Kamm Lösung für inhomogene DGL(v 6= 0) mit singulärer Matrix A (nicht entkoppelbar): e q2 " # 0 0 λ1 = 0, λ2 < 0 instabil Kamm 0 λ2 q1 q2 q2 λ1 = 0, λ2 > 0 Portrait q2 Knoten 2 stabil Name q1 q2 " x=0 α > 0, β 6= 0 Knoten 1 stabil i j j Eigenwerte q1 q2 q1 q2 0 < λ1 , 0 < λ2 r Matrix Λ " Knoten 2 q qj Knoten 1 instabil n oi h Im q = qr 1 i h = x0,1 · eαt · cos(βt)q − sin(βt) · q + r ji h + x0,2 · eαt · sin(βt)q + cos(βt) · q q2 Sattelpunkt stabil x(t) " α β q2 λ2 < 0, λ1 < 0 λ1 = λ2 = α + βj ∈ C Portrait # λ1 < 0 < λ2 !# Hauptvektor q2 q2 " Eigenwerte 2 Name h n o 0 Q = Re q 1 e ∗ " # " ! i h −a12 −a12 Eigenq 0 = a −a = Q0 = q 0 a −a 11 22 11 22 − 1 1 2 vektor e 2 2 # h i x0,1 x(t) = 1 + (A − λ1) · t · exp(λt) · x0,2 e e e Gegeben: Homogene Differnetialgleichungen der Form x = Ax e mit Anfangswerten x0,1 und x0,2 " 0 0 # 0 0 " 0 0 # 1 0 λ=0 stabil Ruheebene q1 q2 " 0 0 q2 q1 λ=0 instabil Ruhegerade # 1 0 λ=0 instabil Knoten q1 q1 12. Zweitormatrizen In → R e " r11 R e r21 " G e 1 det R " H f 1 r22 " H0 f 1 r11 1 r21 A0 e 1 r12 r22 r11 1 r22 1 " 1 det G −r12 # " r11 g21 # −r12 " 1 g11 # det R e # det R e r22 # det R e r11 −g12 g22 g11 # 1 h11 g22 −g12 # 1 g12 −g22 − det G e " −g11 − det G e Homepage: www.latex4ei.de – Fehler bitte sofort melden. −1 −g22 # " 1 h011 1 # h11 h12 h22 " −h21 e # 1 h21 −h12 h22 " − det H f −h22 # " 1 h12 1 h22 # " h11 −h11 −1 h11 det H f det H f h022 −h021 # 1 h021 # 1 h012 h011 h012 h021 h022 " − det H 0 −h011 " − det H 0 f −h011 # " 1 a21 0 −h012 " e 1 det H −h012 det H 0 f −h021 1 det H 0 A0 e A e 1 −h021 1 h022 det H f # h21 " −g11 1 h12 −h12 1 −h21 " −g21 " det H f −h21 " # det G e " # det G g12 1 e g22 −g21 1 1 g21 " 1 h22 g11 g12 1 H0 f H f −g21 e det R r12 e −r21 1 −r21 " # r22 1 " A e r12 −r21 e G e # 1 a12 1 −h012 h011 −1 " 1 a22 1 a11 −h022 # −1 det A e a22 1 " a22 # # a11 a12 det A e a21 −1 " a21 1 " 1 a021 − det A e a11 a11 a12 a21 a22 # 1 det A e a011 1 a012 −1 − det A e a022 a012 1 " 1 a011 −1 # 1 det A e " a22 # 1 a022 1 det A0 a21 a11 # # det A a012 e " # 0 a22 a012 # a12 # − det A a021 e " # 0 a21 −1 e −h022 # a011 " # − det A e a12 a022 " # " a021 a011 a012 a021 a022 von LaTeX4EI - Mail: [email protected] a011 # Stand: 9. Februar 2016 um 17:35 Uhr 4