Drehungen, Drehmoment, Drehimpuls und Gleichgewicht
Werbung

2.8
Drehungen (Rotation)
2.8.1 Die kinematischen Variablen der Rotationsbewegung
Die allgemeine Bewegung eines Systems von Massenpunkten lasst sich immer zerlegen in Translation und Rotation. Die Translation haben wir schon im Abschnitt 2.7.4 behandelt. Da bei
der Translation alle Massenpunkte des Systems bzw. Massenelemente eines Korpers zu einer
bestimmten Zeit dieselbe Geschwindigkeit ~v0 haben, ist diese Bewegung durch die Angabe der
drei Koordinaten von ~v0 vollstandig beschreibbar, d. h. die Anzahl kinematischer Freiheitsgrade
ist fT = 3. Die Translation muss keine geradlinige Bewegung sein, jedoch dreht sich der Korper
dabei nicht. Alle Punkte des Systems werden dabei auch gleich beschleunigt. Bei der Rotation
dreht sich das System oder der Korper um eine Achse.
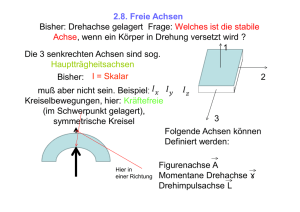
Zur Illustration der fur die Rotation relevanten kinematischen Grossen betrachten wir eine kleine Hantel, an deren
z
Enden sich zwei Massen m1 und m2 benden. Sie wird um
eine Achse gedreht, die wir z ;Achse nennen und die die
ω
Hantelachse kreuzt, aber nicht mit ihr identisch ist (siehe
d1
nebenstehende Abbildung). Bei fester Umdrehungszahl, d.
ϑ1
h. konstanter Drehgeschwindigkeit, haben alle Teile des Syr1
stems eine konstante Winkelgeschwindigkeit bezuglich der
y
O ϑ2
Drehung um die z ;Achse:
d2
1
!1 = !2 = ! = d
dt = dt
r2
x
d2
Die Geschwindigkeit eines Punkts nimmt mit dem Abstand
von der Drehachse zu, wenn die Hantel starr bleiben soll:
v1 = d1 !
m2
y
v2
v2 = d2!
Wahlen wir den Durchstosspunkt der Drehachse durch die
Hantelachse als Ursprung O eines cartesischen Koordinatensystems, dann sind die di die Komponenten der Ortsvektoren ~ri ? zur Drehachse, die Vektoren ~vi liegen in
(x; y );Ebene ebenfalls ? zur Drehachse.
ϕ1
ϕ2
O
x
v1
~ri = ri(cos i sin i ; sin i sin i ; cos i ) i = 1; 2
~vi = !ri sin i (; sin i; cos i ; 0) = !di(; sin i ; cos i ; 0)
Mit der Denition des Vektors ~! (k z; j~!j = ! ), d. h. in unserem Fall ~! = (0; 0; ! ), lassen
sich die Geschwindigkeiten auch schreiben als
~vi = ~! ~ri
Auch die Rotation ist so durch einen Vektor (~!) charakterisiert, d. h. auch sie erlaubt drei
Freiheitsgrade, fR = 3. Aus der Superposition von Translation und Rotation erhalten wir den
allgemeinen Bewegungszustand eines starren Korpers. Die Geschwindigkeit jedes beliebigen
Teils i ist dann
~vi = ~v0 + ~! ~ri
2.104
also durch die zeitabhangigen Vektoren ~v0 (t) und ~!(t) charakterisiert (ftot = 6).
Die Zerlegung einer Bewegung in Translation und Rotation ist nicht eindeutig, woran uns das
Beispiel einer Eislauferin erinnern soll (Abbildung 2.58), denn um von einem Bewegungszustand
in einen anderen zu gelangen, verfugt die Lauferin uber eine grosse Freiheit in der Wahl der
Reihenfolge und Lange der Verschiebungsschritte und Drehbewegungen.
Abbildung 2.58: Die amerikanische Eiskunstlauferin Kristi Yamaguchi bei einer Translations(a) bzw. Drehbewegung (b) (aus Halliday-Resnick-Walker, op. cit., Figure 11-1).
2.8.2 Kinetische Energie der Rotationsbewegung, Tragheitsmoment
Wir beschranken uns bei der Rotation eines starren Korpers auf den Fall, wo er sich um eine
raumfeste Achse durch den Schwerpunkt S dreht. Fur diesen einfachen Fall sind alle Winkelgeschwindigkeiten !i der einzelnen Teile gleich gross: !i = ! . Mit den Beziehungen aus dem
letzten Abschnitt ergibt sich dann fur die kinetische Energie der Rotationsbewegung
TR =
XT = X m v = X m d
2
i
i
2
i
!2 = !2
2
2
2
i i
i iS i
i
Xm d
2
i
i iS
Der zusatzliche Index S weist darauf hin, dass wir eine Achse durch den Schwerpunkt gewahlt
haben. Wir denieren als Tragheitsmoment bezuglich einer Achse durch den Schwerpunkt:
JS =
Xm d
i
) TR = JS !2
2
2
i i
JS und damit auch TR hangt nicht nur von der Gesamtmasse M , sondern vor allem von der
Verteilung der Abstande diS der Massen mi von der Drehachse ab. Fur eine kontinuierliche
2.105
Massenverteilung muss statt der Summe ein Integral berechnet werden
Z
JS = d2S dm
Beispiele: i) Hantel (R << d, Beitrag der Verbindungsstange
vernachlassigt)
JS = 2Md2s
Z
Z
Z
= d dm = d dV = (r sin )(r sin drdd)
Z Z Z
J = r dr d sin d
2
2
S
R
0
2
2
4
0
2
d
M
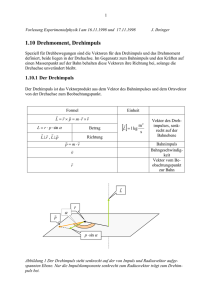
ii) Homogene Kugel mit Radius R bei einer Achse durch den
Mittelpunkt
JS
R
z
R
dV
2
3
0
dr
dϕ
r
r sinθ
ϑ
JS = 815 R5 = ( 43 R3)( 25 R2) = 25 MR2
dϑ
iii) Hantel bei Drehung um Hantelachse (Beitrag der Verbindungsstange
vernachlassigt)
JS = 54 MR2
iv) Homogener Zylinder bezuglich der Zylinderachse
JS = 12 MR2
v) Homogener Zylinder bezuglich einer Achse senkrecht zur
Zylinderachse
2
2
JS = M ( h12 + R4 )
R
d
M
R
h
R1
vi) Homogener Hohlzylinder bezuglich der Zylinderachse
h
R2
R
1
JS = 2 M (R21 + R22)
vii) Dunner Stab bezuglich einer Achse, die senkrecht zum
Stab steht
L
1 ML2
JS = 12
viii) Dunne homogene Platte bezuglich einer Achse, die senkrecht
ω
zur Platte steht
1 M (a2 + b2 )
b
JS = 12
a
Falls keine Translation vorhanden ist und nur konservative Krafte auftreten, konnen wir den
2.106
Energiesatz der Mechanik schreiben als
TR + U = E = const:
Wird zum Beispiel die kinetische Energie der Drehbewegung von
einer sich im Schwerefeld der Erde senkenden Last bezogen, wie
in der gezeichneten Anordnung, so gilt:
R
ω
M
2
Hantel : TR = JS !2 Last : U = mgz
Rotor
Rolle
Wenn die Hantel am Anfang in Ruhe ist (! = 0) und die Last bei
der Hohe h losgelassen wird, so gilt
m
h
mgh
z
mg (h ; z ) = 21 (2MR2)!(z )2 ) !02 = MR
2
Last
Die Endgeschwindigkeit nimmt quadratisch mit dem Abstand der
beiden Hantelmassen von der Drehachse ab.
Ist der Rotation um eine Achse fester Richtung eine Translation senkrecht dazu uberlagert,
so ist die gesamte kinetische Energie des starren Korpers
T = TS + TR = M v2S + JS !2
2
2
Dabei nennen wir TS die Energie der Schwerpunktsbewegung, TR die Energie der Bewegung
relativ zum Schwerpunkt.
Der Vergleich der beiden Terme zeigt eine formelle A hnlichkeit zwischen Translations- und
Rotationsbewegung. Ersetzt man die Masse M durch das Tragheitsmoment JS und die Geschwindigkeit v durch die Winkelgeschwindigkeit ! so erhalt man aus der kinetischen Energie
der Translation des Schwerpunkts TS die kinetische Energie der Rotation TR um eine Achse
durch den Schwerpunkt.
Beispiel { Rollender Zylinder auf einer schiefen Ebene: Zwei gleichschwere Zylinder gleichen Durchmessers werden auf gleicher Hohe auf einer schiefen Ebene losgelassen. Der
eine der beiden Zylinder ist allerdings innen hohl, seine Masse daher exzentrischer verteilt und
sein Tragheitsmoment bezuglich einer Drehung um die Zylinderachse daher gosser. Der hohle
Zylinder rollt langsamer die Ebene hinab und kommt spater am Ende der Ebene an. Warum ?
Die Tragheitsmomente fur den massiven Zylinder (i = 1) und den
hohlen Zylinder (i = 2) ergeben sich zu
R
r
JS2 = 12 (R2 + r2) > JS1
JS 1 = 21 MR2
2
+ 12 JSi !i2
Nach dem Energiesatz gilt : Mgh = 21 MvSi
JSi )
2
mit !i = vRSi ) gh = 12 vSi
(1 + MR
2
Der zweite Term in der Klammer gibt den Anteil der potentiellen Energie an, der in kinetische
Energie der Rotationsbewegung geht, der erste Term den Anteil, der in kinetische Energie der
2.107
Translationsbewegung geht. Fur den massiven Zylinder ist JS =MR2 = 1=2, d. h. 2=3 der
potentiellen Energie wird fur die Translation verwendet, 1=3 fur die Drehung. Beim hohlen
Zylinder ist JS =MR2 = 1=2(1 + r2 =R2) > 1=2, es geht also ein grosserer Anteil der Energie in
die Drehbewegung:
gh = 43 vS2 1 = vS2 2 mit > 34 ) vS2 < vS1
Wie steht es nun mit der Reibung ? Ohne Reibung wurden beide Zylinder gar nicht rollen,
sondern gleiten. Fur das Rollen ist in der Tat die Haftreibung verantwortlich. Diese Kraft leistet
aber keine Arbeit, sie sorgt nur dafur dass ein Teil der Energie in Rotationsenergie verwandelt
wird. Die beim Rollen auftretende Rollreibung, die zu einer Verminderung der Winkelgeschwindigkeit fuhrt, ist sehr klein, und kann daher in den obigen Betrachtungen vernachlassigt werden.
Die gleichen U berlegungen lassen sich anwenden, wenn man zwei gleiche Zylinder von gleicher
Hohe fallen lasst, wobei der eine frei fallt, der andere mit einem dunnen Zwirnfaden umwickelt
ist, und sich deswegen beim Fallen dreht. Der sich drehende Zylinder fallt langsamer, weil wieder
ein Teil der Lageenergie im Schwerefeld fur die kinetische Energie der Drehbewegung verwendet
wird. Da beim sich drehenden Zylinder 1=3 der Energie in die Rotation geht, legt er beim Fall
nur 2=3 der Strecke zuruck, die der frei fallende in der gleichen Zeit zurucklegt.
Arbeit: Die Arbeit lasst sich bei der Rotationsbewegung nicht so einfach aus den ausseren
Kraften berechnen, weder bei starren Korpern noch bei beweglichen Systemen.
F2
Obwohl fur das Kraftepaar in der Skizze gilt F~1 + F~2 = 0
und jd~r1j = jd~r2j gilt
dr2
F~1 d~r1 + F~2 d~r2 6= 0
A hnliches lasst sich auch fur Paare von inneren Kraften
G~ ik = ;G~ ki zeigen.
dr1
F1
2.8.3 Drehimpuls, Drehmoment und Drallsatz fur den Massenpunkt
Wenn man die Pirouette der Eiskunstlauferin in Abbildung 2.49 vom Ansatz bis zum Ende verfolgt, dann beobachtet man, dass bei Beginn der Drehbewegung die Lauferin mit weit gestreckten
Armen Schwung holt, und dann die Arme eng an den Oberkorper heranzieht und dabei enorm
an Drehgeschwindigkeit gewinnt. Dies ist uns aus der Einfuhrung (Abschnitt 1.2.1) her bekannt.
Als biologisches Beispiel kann wiederum die Wustenameise cataglyphis (Abschnitt 1.2.5) dienen,
die beim extrem schnellen Drehen jeweils den Hinterteil ihres Korpers steil aufstellt. In beiden
Fallen wird, das lehren uns die im letzten Abschnitt gewonnen Kenntnisse, das Tragheitsmoment
bezuglich der Drehachse erheblich reduziert, da die Massenverteilung weniger exzentrisch ist. Die
Erhohung der Winkelgeschwindigkeit bei Verringerung des Tragheitsmoments ist eine Folge des
Drehimpulserhaltungssatzes. Das Produkt von Masse und Geschwindigkeit wird bei einer Translation Impuls genannt. Fur ein abgeschlossenes System gilt Impulserhaltung. Fur eine Drehung
nennt man analog das Produkt von Tragheitsmoment und Winkelgeschwindigkeit Drehimpuls.
In einem abgeschlossenem System ist auch der Drehimpuls erhalten. Formell gewinnt man diese
Erkenntnis fur die Bewegung eines einzelnen Massenpunkts aus einer erneuten Umformulierung
des Newton'schen Aktionsprinzips.
d~p = F~
dt
p
~
~r d~
dt = ~r F
)
2.108
Denieren wir den Drall oder Drehimpuls L~ 0 und das Drehmoment M~ 0 als
L~ 0 = ~r ~p
M~ 0 = ~r F~ ;
so lasst sich diese Gleichung schreiben als
dL~ 0 = M~
0
dt
Drallsatz
Dass die rechten Seiten der letzten beiden Gleichungen ubereinstimmen, folgt unmittelbar
aus der Denition von M~ 0 . Die linken Seiten sind auch gleich, denn es ist
dL~ 0 = d (~r p~) = d~r p~ + ~r d~p = 0 + ~r d~p
dt dt
dt
dt
dt
Im letzten Schritt haben wir berucksichtigt, dass d~r=dt und ~p parallele Vektoren sind, ihr
Vektorprodukt also verschwindet.
Der Drallsatz verknupft die A nderung des Drehimpulses mit dem Drehmoment, beide bezogen auf den Punkt 0. L~ 0 ist ein Vektor, der senkrecht auf der von ~r und ~p aufgespannten
Ebene steht. M~ 0 ist ein Vektor, der senkrecht auf der von ~r und F~ aufgespannten Ebene steht.
Die Richtungen werden durch die Schraubenzieherregel festgelegt. Die Grossen L~ 0 und M~ 0
enthalten den Ortsvektor ~r. Sie sind erst dann deniert, wenn ein Bezugspunkt 0 festgelegt
wird. Drall und Drehmoment mussen immer auf einen gemeinsamen Punkt 0 bezogen werden.
Mit dem Drallsatz haben wir anscheinend nur eine neue, kompliziertere Formulierung des 2.
Newton'schen Prinzips gefunden. Der Drallsatz ist aber unentbehrlichen fur die Analyse von
Drehbewegungen und der Stabilitat von statischen Situationen gegenuber Drehungen.
Im ersten der folgenden Beispiele, der gleichformigen Bewegung eines Massenpunkts, gelangen wir tatsachlich mit dem Drallsatz zu keinen neuen Einsichten. Im zweiten Beispiel, der
Bewegung in einem zentralen Kraftfeld, erweist sich der Drallsatz als sehr nutzlich und fuhrt
uns z. B. direkt zum Kepler'schen Flachensatz.
Beispiel { Gleichformige Bewegung eines Massenpunkts:
Wegen ~p =const. ist F~ = 0. Somit gilt M~ 0 = 0 und L~ 0 =const.
bzw.
L0 = j~r ~pj = rmv sin = mvd
Beispiel { Bewegung in zentralen Kraftfeldern: Wir betrachten eine Bewegung des
Massenpunkts unter dem Einuss einer Kraft F~ , deren Wirkungslinie durch einen raumfesten
Punkt 0 geht. Wir nennen sie eine Zentralkraft,
F~ = f (r)~r
z: B: f (r) = ; ;mM
Es ist dann L~ 0 = ~r ~p = m~r ~v
r3
M~ 0 = ~r F~ = f (r)~r ~r = 0
dL~ 0 = 0 oder L~ = const:
0
dt
Bei einer Zentralbewegung ist der Drehimpuls konstant.
Wir haben somit im Drehimpuls eine Grosse gefunden, fur welche, wie fur Impuls und Energie, ein Erhaltungssatz gilt. Der Impuls einer Masse ist aber nur erhalten, wenn keine Krafte
2.109
auf sie wirken. Sie bewegt sich dann geradlinig und gleichformig, was in beschrankten Gebieten
nicht uber langere Zeit moglich ist, oder sie ruht, was nicht besonders interessant ist. Im Gegensatz dazu ist bei Zentralbewegungen eine Kraft wirksam. Da beide fundamentalen Krafte,
namlich die Gravitation und die Coulomb-Kraft Zentralkrafte sind, spielen Zentralbewegungen und die damit verknupfte Drallerhaltung in der Natur eine sehr wichtige Rolle (Planeten,
Atome). Folgende Schlusse lassen sich aus der Drallerhaltung ziehen.
Eine Zentralbewegung ist eben, denn d~r steht wegen L~ 0 / ~r ~v / ~r d~r immer senkrecht
auf der festen Richtung von L~ 0.
Da gilt
r = const:
L~ 0 = m~r ~v = m~r d~
dt
p
uberstreicht der Ortsvektor in der Zeit
dt die Flache
dA = 12 j~r d~rj
Der sogenannte Flachensatz besagt eigentlich:
dA4
dA1
m
F(r)
L0
dA2
dA3
L0 = 2m dA
dt = const:
Mit andern Worten, in gleichen Zeiten dt uberstreicht der Radiusvektor ~r immer dieselbe
Flache dA (2. Keplersches Gesetz, siehe auch Abschnitt 2.5.3.1.1)
Beispiel { Kreisbewegung: Einige Bewegungen im Zentralfeld sind Kreisbewegungen um
eine Drehachse z . Wahlen wir den Kreismittelpunkt als Bezugspunkt 0, so steht der Drall
senkrecht zur Bahn und fallt in die z -Achse
L~ 0 = ~r p~ = m~r ~v = const:
L0z = L0 = mr2!
z
Wahlen wir aber einen anderen Punkt 0 auf z als Bezugspunkt,
so prazediert L~ 0 , um die z -Achse. Es ist
0
p
0
L~ 0 = ~r p~ = ~r0 ~p + ~r p~
0
L0
m
0
0
Daraus berechnet sich die z -Komponente zu
r
r0
L0 z = (~r0 p~)z + (~r p~)z = (~r p~)z = mr2 ! = L0z
Wir sehen daraus, dass die z -Komponente von L~ 0 { und nur diese
r'
0
{ bei einer Kreisbewegung unabhangig von der Wahl des Bezugspunkts 0 ist, sofern dieser auf der Drehachse liegt.
0
L0'
0'
Wir nden also ! = L0 =mr2. ! nimmt quadratisch zu, wenn der Radius abnimmt. Dies
2.110
erklart den beeindruckenden Eekt bei der Pirouette. Die Grosse mr2 entspricht fur den einzelnen Massenpunkt dem Tragheitsmoment bezuglich der Drehachse durch das Zentrum. Wir
konnen also auch schreiben
L0z = J0 ! ;
und erhalten damit wieder eine Beziehung, die mit geeigneter U bersetzung von der linearen
Bewegung { Impuls = Masse Geschwindigkeit { zur Drehbewegung fuhrt { Drehimpuls =
Tragheitsmoment Winkelgeschwindigkeit. Als mnemotechnische Hilfe sind in Tabelle 2.5 die
entsprechenden Ausdrucke fur Rotation und Translation einander gegenubergestellt.
Translation
Rotation
Ortsvektor ~r
Drehwinkel Geschwindigkeit ~v = d~r=dt
Winkelgeschwindigkeit ! = d=dt
Masse m
Tragheitsmoment J0
Impuls p~ = m~v
Drehimpuls L0 = J0 ! (L~ 0 = ~r p~)
2
Kinetische Energie T = (m=2)v Kinetische Energie T = (J0=2)! 2
Kraft F~
Drehmoment M~ 0 (= ~r F~ )
Aktionsprinzip d~p=dt = F~
Drallsatz dL~ 0=dt = M~ 0
Tabelle 2.5: Lernhilfe: A quivalente Grossen bei Rotation und Translation.
2.8.4 Drehimpuls, Drehmoment und Drallsatz fur Systeme
Auf ein System von n Massenpunkten mj wirken aussere Krafte F~j (nicht alle notwendigerweise
6= 0) und innere Krafte G~ jk . Wir mochten das totale, resultierende Drehmoment dieser Krafte
bezuglich eines raumfesten Punkts 0 berechnen. Tragen die inneren Krafte dazu bei ?
Die Drehmomente der Kraft G~ ik und ihrer Gegenkraft G~ ki berechnet sich zu:
jM~ ik j = j~rk G~ ik j = d Gik
jM~ kij = j~ri G~ kij = d Gki = d Gik
ri
i
Gki
Da die Distanz zwischen Angrislinie der beiden Krafte und Be0
rk
zugspunkt gleich ist, ferner die Betrage der Krafte gleich sind,
d
k Gik
sind auch die Betrage der Drehmomente gleich, haben aber, wegen
der entgegengesetzten Richtung der Krafte auch entgegengesetzte
Richtung.
Die Drehmomente der Reaktionspartner nach dem 3. Newton'schen Prinzip heben sich
gegenseitig auf. Das totale Drehmoment der ausseren Krafte M~ 0 ergibt sich zu
M~ 0 =
X M~ = X ~r F~
n
j =1
0j
2.111
j
j
j
Da fur jeden einzelnen Massenpunkt der Drallsatz gilt, folgt fur das Gesamtsystem eine entsprechende Beziehung, namlich
dL~ 0j = M~
)
0j
dt
Hier haben wir den totalen Drall L~ 0 deniert als
L~ 0 =
X L~
j
oj
dL~ 0 = M~
0
dt
= mj (~rj ~vj )
Die zeitliche A nderung des totalen Drehimpulses eines Systems bezuglich 0 ist gleich der
Summe aller Drehmomente der aussern Krafte bezogen auf denselben Punkt 0.
~
L0 = 0
Fur ein abgeschlossenes System ist F~j = 0 d: h: M~ 0 = 0 und ddt
Dies ist der Erhaltungssatz des Drehimpulses. Der totale Drehimpuls ist eine Konstante der
Bewegung.
Zwei Experimente, die auf einem Drehstuhl ausgefuhrt werden konnen und die Erhaltung
des Drehimpulses in einem abgeschlossenen System zeigen, sind in Abbildung 2.59 gezeigt.
Bei den in Abbildung 2.52 gezeigten Situationen dreht sich ein mehr oder weniger starrer
Korper um eine raumfeste Achse (z ;Achse genannt) mit der Winkelgeschwindigkeit ! . Ohne
aussere Krafte handelte es sich um abgeschlossene Systeme. Was andert sich, wenn aussere
Krafte F~i an durch Ortsvektoren ~ri markierten Punkten angreifen ?
Wir beginnen mit einem einfachen Beispiel, das es erlaubt die Prinzipien zu erlautern,
und verallgemeinern dann anschliessend. An einem Punkt ausserhalb der Achse der Scheibe
(Tragheitsmoment J0 = mR2 =2) greift eine aussere Kraft F~ an. Die Kraft erzeugt ein Drehmoment und eine Drehung der Scheibe. Es handelt sich um eine Bewegung mit einem Freiheitsgrad.
Die Angabe des Drehwinkels in Funktion der Zeit genugt.
Wir nennen F = Fxy die Komponente von F~ im der Scheibenebene senkrecht zur Drehachse, und F = Fz die Komponente
parallel zur Drehachse. Letzere tragt nicht zur Drehung bei, sonz
dern muss, damit sich die Scheibe nicht in Achsenrichtung bewegt
Lager
durch geeignete Lagerkrafte aufgehoben werden:
?
k
F = Fz = ;
k
XF
i
Achse
F
Lager;z;i
Damit in zur Drehachse senkrechten Richtung ebenfalls keine
Translation auftritt, mussen wieder geeignete Halterungen und
Lagerkrafte dies verhindern:
F = Fxy
?
X
=; F
i
r
d
α
F
F
Scheibe
Lager
Lager;xy;i
Die Komponente senkrecht zur Drehachse F hat aber einen Einuss auf die Drehung, und
zwar umso mehr, je weiter weg von der Achse ihre Angrislinie verlauft (Hebelgesetz von Archimedes). Wenn d der kurzeste Abstand der Wirkungslinie von der z ;Achse ist, erhalten wir
?
?
2.112
L
L
ωi
Ii
ωf
If
L
-Li
Li
ωi
ω
Li
Anfang
L
ωi
-Li
Schluss
Abbildung 2.59: Oben: Demonstration des Pirouetten Eekts auf einem Drehstuhl mit zwei
Hanteln. In der korpernahen Position ist das Tragheitsmoment kleiner, bei konstantem Drehimpuls daher die Winkelgeschwindigkeit grosser. Unten: Wenn das sich drehende Velorad gedreht
wird, andert sich die Richtung des Drehimpulsvektors fur das Velorad. Eine entsprechende
A nderung des Drehimpulsvektors der Versuchsperson muss dies kompensieren, damit der total
Drehimpuls des Systems konstant bleibt.
2.113
h i
fur die z ;Komponente des Drehmoments:
M0z = ~r F~ z = rFxy sin = d F
Dieses Drehmoment bewirkt eine A nderung des Drehimpulses der Scheibe M0z = dL0z =dt.
Wie gross ist der Drehimpuls der Scheibe ? Der Beitrag von dm zum Drehimpuls ist
?
?
dL0z = rv dm = !r2dm v = r! = r d
dt
)
R
Z
L0z = ! r2dm = !J0
Wir nden also, nicht unerwartet, L0z = J0 ! , wie wir
dϕ
0
ω
ω
dm
es fur Kreisbahn schon oben abgeleitet hatten.
Damit erhalten wir den Drallsatz fur die Drehbewegung eines starren Korpers um eine raumfeste Achse durch den Bezugspunkt 0 (hier im Zentrum der Scheibe):
2
M0z = d F = dLdt0z = dtd (J0! ) = J0 ddt2
Greifen statt einer Kraft mehrere an, so ist M0z durch das resultierende Drehmoment zu
?
ersetzen:
?
M0z =
Xd
i
F
i? i?
Der Drallsatz in der obigen Form gilt auch fur einen beliebig geformten starren Korper,
der sich um eine raumfeste Ache dreht, und auch fur eine Drehung mit dem Schwerpunkt als
Bezugspunkt (0 ! S ).
Beispiel { das physische Pendel: Ein starrer Korper werde in einem Drehpunkt 0 reibungslos gelagert. Wir interessieren uns fur die Schwingungen in einer vertikalen Ebene. Die
wirksamen Krafte sind die Lagerkraft F~L in 0 und das Gewicht G~ . Die Schwingung ist ein
spezieller Fall einer Drehung um eine horizontale Achse durch 0.
Das Drehmoment der Lagerkraft bezuglich 0 verschwindet. Fur
das Gewicht gilt
FL
M~ 0 = ~rS G~ ? Bildebene k z ; Achse
Die Bewegungsgleichung lautet
0
J0 ddt2 = ;Mgd sin 2
d
Fur kleine Auslenkungen gilt naherungsweise
S
2
2
J0 ddt2 = ;Mgd ddt2 = ; Mgd
J0 ) (t) = 0 cos(!0t + ) mit ! =
s Mgd
2.114
J0
G
φ
2.8.5 Rotation und Translation: Roll- und Kreiselbewegungen
Bewegen sich die einzelnen Punkte eines starren Korpers so, dass ihre Geschwindigkeiten dauernd
parallel einer festen Ebene sind, so spricht man von einer ebenen Bewegung. Diese kann im
allgemeinsten Fall als U berlagerung einer Translation parallel zur Ebene und einer Rotation
um eine Achse normal zur Ebene (welche durch den Schwerpunkt S lauft) aufgefasst werden.
Die Bewegung hat 3 Freiheitsgrade. Die entsprechenden Bewegungsgleichungen folgen aus dem
Schwerpunktsatz und dem Drallsatz. Wenn wir wieder von dem Beispiel der sich drehenden
Scheibe ausgehen, so konnen wir eine solche Situation erreichen, wenn wir die Halterung in der
(x; y );Ebene losen, aber das Kraftegleichgewicht in z ;Richtung belassen.
XF
iz
i
=0
Die Komponenten in der (x; y );Ebene fuhren zu einer Translation des Schwerpunkts
XF
2
M ddtx2S =
M ddty2S =
2
i
ix
XF
iy
i
Die einzelnen Bestandteile des starren Korpers machen immer noch eine Bewegung in der Ebene
senkrecht zur Drehachse (mit dem Schwerpunkt als Bezugspunkt)
2
Js ddt2 =
Xd
i
i?
Fi
?
Z
Js = d2s dm
Die Koordinaten zu den drei Freiheitsgraden xS ; yS und und ihre Zeitabhangigkeit sind
durch diese Gleichungen bestimmt.
Beispiel { Rollen eines Reifens auf ebener Unterlage: Ein rotierender Reifen (oder
Zylinder) wird zur Zeit t = 0 so auf eine horizontale Unterlage aufgesetzt, dass seine Schwerpunktsgeschwindigkeit Null ist. Wir fragen nach dem Bewegungsablauf. Es wirken das Gewicht
G~ , eine Normalkraft N~ und eine Gleitreibungskraft R~ G nach dem Aufsetzen.
Die Bewegungsgleichungen lauten
y
m ddty2s = 0 = mg ; N
2
.
2
M ddtx2s = RG = G N ) vS = G gt
2
Js ddt2 = m`2 d!
dt = ;RG ` = ;G mg`
N
a
φ
ω
vs
x
R
) d!
= ; G g ) ! (t) = !0 ; G g t
G
dt
`
`
Die Gleitreibung wirkt beschleunigend. vs nimmt linear mit t zu, ! entsprechend ab. Ist
vS (tR) = `!(tR), so tritt Rollen ein, der Reifen haftet mit RH = 0. vS bleibt dann konstant. Reines Rollen verlangt immer vS = `! , die sogenannte geometrische Rollbedingung. Der Zeitpunkt,
bei dem der Reifen an zu rollen beginnt, ist gegeben durch
2.115
tR = 2!0 `g
G
Setzt man die Zylinder auf eine schiefe Ebene, so kommt
N
es auf deren Steigung und die Grosse des Gleitreibungskoezienten an, ob der Zylinder zuerst nach oben rutscht,
abbremst, nach oben rollt bis er zum Stillstand kommt
und schliesslich zuruckrollt, oder seine Bewegung immer
RG
G
nach unten gerichtet ist. Die Kraft RG = G mg cos beα
schleunigt den Schwerpunkt nach oben, die Komponente
des Gewichts in der Ebene mg sin bremst ab.
Kreiselbewegungen: Ein besonders faszinierendes Gebiet der Dynamik von Drehbewegungen sind Kreiselbewegungen. Dazu gibt es eine grosse Zahl von Demonstrationen, die teilweise
recht verbluende Eekte zeigen (Abbildung 2.60), und quantitativ nur schwer zu erfassen sind.
Dazu gehoren schon die einfachsten Kinderkreisel, von denen es die verschiedensten Formen gibt
(Abbildung 2.64), { Kreisel, die man leicht laufen lassen kann, d. h. die bei jeder Art von Anfangsdrehung stabil bleiben, { Kreisel die auch mit grosster Muhe nicht laufen, sondern immer
kippen, { Kreisel die sich auf den Kopf stellen, und dies bei leichter Veranderung dann nicht
mehr tun (Abbildung 2.61). Im Grunde genommen tut ein Kreisel immer das Gegenteil von
dem, was man naiverweise von ihm erwartet. Der an einem Faden aufgehangte Veloradkreisel
(Abbildung 2.62) fallt nicht nach unten { das tut er nur wenn er sich nicht dreht { sondern dreht
sich leicht schrag hangend langsam um die Aufhangeachse. Hangt man an den ausbalancierten
Veloradkreisel (Abbildung 2.63) ein kleines Zusatzgewicht an, dann neigt sich nicht die Achse,
sondern der Kreisel beginnt herumzuwandern. Versucht man die Wanderung mit einem Stab zu
stoppen, so weicht der Kreisel nach oben aus. Wie kann diese Phanomene wenigstens qualitativ
verstehen ?
Abbildung 2.60: Die Physik-Nobelpreistrager
Wolfgang Pauli und Niels Bohr bewundern
einen Stehaufkreisel.
Abbildung 2.61: Patentschrift von 1891 fur
den Stehaufkreisel.
Physikalisch bezeichnet man als Kreisel einen starren Korper, der nur an einem Punkt O
2.116
festgehalten wird. Er hat drei Freiheitsgrade, die aber alle Rotationsfreiheitsgrade sind. Am
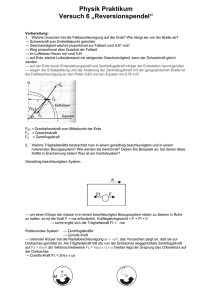
Beispiel des aufgehangten Velorads (Abbildung 2.62) sehen wir dies recht gut: i) Das Rad
dreht sich um seine Achse; ii) die Achse des Rads dreht sich um den Aufhangepunkt; iii) die
Aufhangevorrichtung rotiert langsam um die vertikale Achse. Die Lage eines Punkts wird durch
die Angabe von drei Drehwinkeln bestimmt.
z
r
z
ω
0
r
y
y
Lo
Mo
x
0
Mo=
x
dLo
dt
Spitze des L-Vektors
z
Lo (t)
x
Mg
0
dφ
Lo (t+dt)
y
dLo
dt
Mg
Abbildung 2.62: Krafte und Drehmomente beim hangenden Velorad. Links: Das nichtdrehenden Rad fallt mit Drehung um die y ;Achse, wegen des Drehmoments M~ 0 . Mitte: Ein
schnell drehendes Velorad mit dem Drehimpuls L~ 0 prazidiert um die z ;Achse. Die A nderung
des Drehimpulses hat die Richtung des von der Gewichtskraft erzeugten Drehmoments. Rechts:
Die Kreisbahn, die die Spitze des Drehimpulsvektors ausfuhrt.
Der Schlussel zum Verstandnis von Kreiselbewegungen ist der Drallsatz dL~ 0 =dt = M~ 0 . Die
A nderung des Drehimpulses pro Zeiteinheit ist gleich dem Drehmoment der auf den Kreisel
wirkenden Krafte. Wichtig fur unsere U berlegungen ist vor allen Dingen, dass
dL~ 0 k M~ 0
gilt. Dies erlaubt die Richtung der Kreiselbewegung ohne Rechnung zu ermitteln.
Beim aufgehangten Velorad (Abbildung 2.62) produziert das im Schwerpunkt in der Nabe
angreifende Gewicht ein Drehmoment M~ O parallel zur y ;Richtung. Wenn das Rad nicht dreht,
ist der Anfangsdrehimpuls null. Das Drehmoment andert den Drehimpuls und das Rad fallt um
die y ;Achse drehend:
dL0y = M = Mgr
0y
dt
Wenn das Rad (Tragheitsmoment J ) schon am Anfang sehr schnell mit der Winkelgeschwindigkeit ! dreht, dann hat es einen sehr grossen Drehimpuls in Richtung seiner Drehachse:
L~ 0 k ~r jL~ j = J!
Die durch das Moment des Gewichts erzeugte Drehimpulsanderung dL~ 0 ist senkrecht zu L~ 0 ,
andert also nicht die Lange von L~ 0, sondern nur dessen Richtung. Dies fuhrt der Prazession um
die z ;Achse in y ;Richtung und zu einer Kreisbahn fur die Spitze des Drehimpulsvektors. Aus
Abbildung 2.62 lasst sich ablesen, dass die A nderung des Drehwinkels gegeben ist durch
d = 1 dL0 = Mgr dt
L0 dt
2.117
J!
Die Prazessionsrate wird um so kleiner, je schneller das Rad dreht, d. h. je grosser ! ist.
Da die Masse M auch im Tragheitsmoment vorkommt, ist unabhangig von der Masse des
Velorads.
Das ausbalancierte Velorad (Abbildung 2.63) ist ein Modell fur einen kraftefreien Kreisel,
bei dem sich nur das Rad bewegt, nicht aber der Aufhangarm. Erst mit einem Zusatzgewicht
erzeugt man ein ausseres Drehmoment, dass wir gezeichnet die Prazession erzeugt.
ω
z
m1
r
0
Lo
x
m
Präzession
F
Lo
0
Mo
Lo+dLo
Abbildung 2.63:
Kraftefreier Velokreisel.
dLo
Mo
y
Abbildung 2.64: Links: Der Drehsinn des Stehaufkreisel beim Aufrichten. Der Schwerpunkt
ist mit einem weissen Punkt markiert. Rechts: Sechs Kreiseltypen mit unterschiedlichen Stabilitatseigenschaften. Wenn diese Kreisel mit einer der Geschwindigkeit proportionalen Reibung
uber den Boden rutschen, ist (1, links oben) stets instabil, (5) stets stabil, (3), (6), (7) sind nur
bei langsamer Drehung, (2), (4) und (8, rechts unten) nur bei schneller Drehung stabil. (Wie die
Abbildungen 2.60 und 2.61 aus F. Kuypers, C. Ucke,Physik in unserer Zeit 5 (1994), p. 214)
A hnliche U berlegungen lassen sich auch fur Spielzeugkreisel
anstellen. Als Beispiel betrachten wir den schnellrotierenden, symmetrischen Kreisel, bei dem die Symmetrieachse,
die Winkelgeschwindigkeit ~! und der Drehimpuls L~ 0 ungefahr (aber nicht zu streng) zusammenfallen. Wir stellen uns dazu ein rasch drehendes Velorad vor, das in einem
Punkt O seiner Figurenachse gelagert ist.
(i) Schwerpunkt und Kreiselpunkt fallen zusammen: O = S .
Das Drehmoment ist null. Daraus folgt dL~ 0=dt = 0 und
schliesslich L~ 0 = const. Die Winkelgeschwindigkeit ~! kann,
muss aber nicht konstant sein. Die Figurenachse kann um
L~ 0 herumlaufen (Nutation).
2.118
Lo
O=S
ω
dL0
(ii) Schwerpunkt und Kreiselpunkt fallen nicht zusammen.
Das Gewicht bewirkt bezuglich 0 ein Drehmoment M~ 0 =
~rS G~ . Der Drall kann nicht mehr konstant bleiben wegen
dL~ 0=dt = M~ 0. Werden die Anfangsbedingungen so gewahlt,
dass Figurenachse, !~ und L~ 0 praktisch zusammenfallen, so
prazedieren diese um die Vertikale. Sonst fuhrt die Figurenachse neben der Prazession auch eine Nutation aus. Sie
dreht sich im Mittel um die Vertikale, fuhrt aber zusatzlich
eine Nickbewegung aus.
L0
s
rs
M0
0
G
2.9
Gleichgewicht
Damit ein ausgedehntes Objekt in Ruhe bleibt, genugt es nicht, wie wir in den letzten Abschnitten gesehen haben, dass alle ausseren Krafte verschwinden. Dies garantiert nur, dass sich
der Schwerpunkt nicht verlagert. Es mussen auch noch alle Drehmomente verschwinden, denn
sonst sind immer noch Rotationsbewegungen um eine Achse durch den Schwerpunkt moglich.
Die Gleichgewichtsbedingungen lauten also zusammengefasst (O ist ein raumfester Bezugspunkt,
oder der Schwerpunkt, der allerdings im Gleichgewichtsfall ebenfalls raumfest ist):
X F~ = 0
i
X M~ = X ~r F~ = 0
i
i
0i
i
i
i
Beispiel { aufeinandergelegte Holzklotze auf einer horizontalen Unterlage: Wir
suchen die Krafte auf die beiden Klotze und deren Angrispunkte im Gleichgewicht.
Krafte auf K1 : N1 = G1 = m1g RH = 0
N1
N2
Drehmomente auf K1 : N1x = 0 ) x = 0
x
~N1 fallt in die Wirkungslinie von G~ 1
Krafte auf K2 : N1 = N1 G2 + N1 = N2
0
u
0
G1
v
N2 = G1 + G2
N'1
Drehmomente auf K2 : N2 u = N1 v
u = G G+1 vG
1
2
Krafte auf die Unterlage : N2 = N2
0
G2
N'2
Beispiel { Bestimmung des Schwerpunkts eines starren Korpers: In der ersten
Methode, die wir am Beispiel eines Spazierstocks erlautern, wird der Korper auf zwei beweglichen Auagen gelagert. Je naher die Auagestelle am Schwerpunkt liegt, desto grosser ist die
entsprechende Normalkraft, desto grosser ist auch die Gleitreibung an der Auagestelle. Der
Stab gleitet also dort, wo die Normalkraft kleiner ist, und zwar solange bis die Gleitreibung {
die Normalkraft erhoht sich ja immer an dieser Stelle { den Wert erreicht, der der Haftreibung
2.119
auf der anderen Seite entspricht. Dann kehrt sich die Situation um, und der Stab gleitet auf der
anderen Seite. Die beiden Unterlagen treen sich schliesslich im Schwerpunkt.
N1 + N2 = G x1 N1 ; x2N2 = 0 x1 (G ; N2) ; x2 N2 = 0
N2 = x x+1 Gx = xx1 N1
1
2
2
Kann der Korper in zwei Punkten O und O frei drehbar
aufgehangt werden, so konnen die beiden moglichen Gleichgewichtslagen verglichen werden. G~ muss in der Lotlinie, die
entweder durch O oder O geht, liegen, damit die Gleichgewichtsbedingungen erfullt sind. S ist damit der Schnittpunkt der beiden Lotlinien.
N2
N1
x1
x2
G
0
0
Z
Z
0
0' 0
0'
G
G
Beispiel { Gleichgewicht einer schrag an die Wand gestellten Leiter: Wenn 2 der
Reibungskoezient der Wand, 1 derjenige des Bodens mit der Leiter ist, ergeben sich die
folgenden Gleichgewichtsbedingungen
N2
(1) N1 + R2 = G (2) N2 ; R1 = 0
R2
(3) N2` sin + R2` cos ; G`
2 cos = 0
mit R1 1 N1 R2 2 N2
Der kritische Anstellwinkel K , bei dem Gleiten auftreten
kann, bestimmt sich aus den Bedingungen R1 = 1 N1 und
R2 = 2 N2.
Aus (1) und (2) folgt
l
G
α
R1
N1
) N2 = 1 +G 1
N1 + 2 N2 = G N2 = 1N1
1 2
Aus (3) folgt dann
N2` sin K + 2 N2 ` cos K = G`
2 cos K
) 1 +1G ` sin K + 1+12G ` cos K = G`
2 cos K
1 2
1 2
1 sin K + 12 cos K = 1 + 21 2 cos K ) tan K = 1 ;212
1
2.120
Zusammenfassung: Drehungen, Drehimpuls, Drehmoment
Drehung um eine Achse:
! = d
dt = Winkelgeschwindigkeit der Rotation
di = senkrechter Abstand von mi von der Drehachse; vi = !di = Schnelligkeit von mi
In Vektorschreibweise mit ~! k Drehachse und j~! j = !
~vi = ~! ~ri (~ri = Ortsvektor gemessen von einem Punkt auf der Achse)
Kinetische Energie eines starren Korpers: Rotation um eine Achse durch den Schwerpunkt S :
TR = 21 !2
X m d 1! J
2
i i
i
2
2
S
JS = Tragheitsmoment bezuglich der Achse durch den Schwerpunkt =
Z
Xm d
i
2
i i
Fur eine kontinuierliche Massenverteilung
JS =
d2 dm d = Abstand des Massenelements dm von der Drehachse
V ol
Beipiele
Kugel mit Radius R
Zylinder mit Radius r und Hohe h
Tragheitsmoment
Drehachse
(2=5)MR2
(1=2)Mr2
k Zylinderachse
M [(1=12)h2 + (1=4)r2] ? Zylinderachse
Drehimpuls (Drall) eines Massenpunkts bezuglich eines raumfesten Punkts O: Ein
Massenpunkt mit Impuls ~p, dessen Position durch den Ortsvektor ~r (gemessen von O)
gegeben ist, hat den Drehimpuls
L~ 0 = ~r ~p L~ 0 ? ~r; ~p L0 = rp sin mit = (~r; p~)
6
Drehimpuls eines Systems von Massenpunkten: Die Denitionen gelten auch, wenn O
nicht raumfest, aber identisch mit dem Schwerpunkt S ist.
L~ 0 =
X L~ = X ~r ~p
i
0i
i
i
i
Drehmoment einer Kraft bezuglich eines raumfesten Punkts O: Wenn der Angris-
punkt der Kraft F~ durch den Ortsvektor ~r (gemessen von O) bestimmt ist, ist das Drehmoment gegeben durch
M~ 0 = ~r F~ M~ 0 ? ~r; F~ M0 = rF sin mit = (~r; F~ )
6
Resultierendes Drehmoment fur ein System von Massenpunkten:
M~ 0 = M~ 0i = ~ri F~i
X
X
i
i
2.121
Zusammenfassung: Drehungen, Drehimpuls, Drehmoment
Drallsatz: Der Drehimpuls{ oder Drallsatz gilt fur einen Massenpunkt und ein System von
Massenpunkten (O raumfest oder Schwerpunkt).
dL~ 0 = M~
0
dt
Fur ein abgeschlossenes System ohne aussere Krafte (und damit M~ 0 = 0) ist der Drehimpuls erhalten:
dL~ 0 = 0 ) L~ = const:
0
dt
Gleichgewichtsbedingungen: Greifen an einem Korper die ausseren Krafte F~j mit den Angrispunkten ~rj an, so kann er nur dann in Ruhe sein, wenn gilt:
X F~ = 0
j
j
und
X ~r F~ = X M~
j
j
j
0j
j
=0
O ist ein beliebiger Bezugspunkt.
Beispiel { ebene Bewegung eines starren Korpers: U berlagerung einer Translation des
Schwerpunkts S (in der x; y ;Ebene: ~rS = (xS ; yS )) und einer Drehung um eine Achse durch den Schwerpunkt senkrecht zur (x; y );Ebene (z ;Achse mit Drehwinkel und
Winkelgeschwindigkeit !S = d=dt):
Translation; Schwerpunktssatz : M ddtx2S =
2
XF
j
XF
M ddty2S =
2
jx
2
S
Rotation; Drallsatz : dLdtSz = JS ddt2 = JS d!
dt = MSz =
Drehimpuls : LSz = JS !S Tragheitsmoment JS =
j
Xd
j
jy
F
j? j?
X m d = Z d dm
2
j
2
j j
Hier ist dj = der Abstand des Massenpunkts mj von der Drehachse, dj = die kurzeste
Distanz der Wirkungslinie der Kraftkomponente Fj von der Drehachse, und Fj = die
Komponente der Kraft F~j in der Ebene senkrecht zur Drehachse.
?
?
Kinetische Energie : T = M2 vS2 + J2S !S2
2.122
?