Grundbegriffe Geschwindigkeit und Beschleunigung - Hu
Werbung

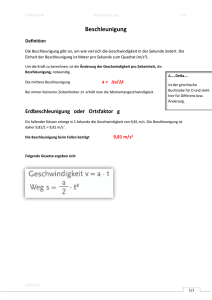
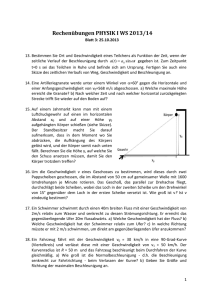
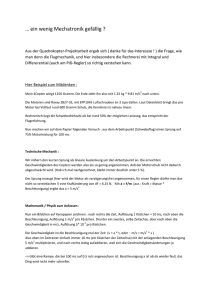
Grundbegriffe Geschwindigkeit und Beschleunigung r Die Geschwindigkeit v eines Körpers ist ein Maß für seinen je Zeiteinheit in einer bestimmten Richtung zurückgelegten Weg. Sie ist, wie der Ort, ein Vektor und definiert durch die Relation r r r ∆ r d r r& v( t ) = lim = = r (t) ∆t → 0 ∆t dt m s • SI-Einheit: • Dimension: Länge/Zeit - • Die Geschwindigkeit ist die erste Ableitung der Weg-Zeit-Funktion Die Geschwindigkeit ist ein Vektor, deren Länge den Betrag der Geschwindigkeit und dessen Richtung die Richtung der Bewegung angibt. L T Die Geschwindigkeit kann sich zeitlich ändern! Die Momentangeschwindigkeit zum Zeitpunkt to ist der Anstieg der Tangente der Funktion r(t) bei t = to. r r Es sei r ( t ) = x ( t ) i Tangente in P0: Momentangeschwindigkeit r r dx ( t ) v( t = t o ) = |t =t o i dt Die Mittlere Geschwindigkeit zwischen zwei Zeitpunkten t1 und t2 erhält man aus dem Anstieg der Sekante zwischen den Punkten P1(x1,t1) und P2(x2,t2) ∆x x 2 − x 1 = t 2 − t1 ∆t Für hinreichend kleine ∆t geht die mittlere Geschwindigkeit in die Momentangeschwindigkeit über. v= r Ist die Geschwindigkeit v( t ) eines Körpers gegeben, so kann man die Weg-Zeitr Funktion r ( t ) durch Integration ermitteln: r r r r ( t ) = ∫ v( t )dt + rC oder t r r r r ( t ) = r0 ( t 0 ) + ∫ v( t )dt t0 r r rC ( t ) : Integrationskonstante, wird bestimmt mittels der Anfangsbedingung r0 (t 0 ) Beispiel: geradlinig gleichförmige Bewegung r r r r r ( t ) − r0 ( t = 0) = v 0 t r Für v( t ) = const.= v 0 ( t ) gilt dann: r r r r Da die Größen v( t ) , v 0 ( t ) und r ( t ) , r0 ( t ) Vektoren sind, erhält man mit r r r r r ( t ) = x ( t ) i + y( t ) j + z( t ) k r r r r v( t ) = v x i + v y j + v z k und aus obiger Vektorgleichung drei Gleichungen: x(t) = xo + v0x t ; y(t) = y0 + v0y t ; z(t) = z0 + v0z t r Ist die Funktion v( t ) bekannt, so kann der zeitliche Mittelwert der Geschwindigkeit zwischen zwei Zeitpunkten t1 und t2 auch folgendermaßen berechnet werden: t2 v= r v ∫ ( t )dt t1 t 2 − t1 = x 2 − x 1 ∆x = t 2 − t1 ∆t Die Berechnung des zeitlichen Mittelwertes der Geschwindigkeit durch Integration führt zum selben Resultat, wie die Berechnung aus dem Anstieg der Sekante. Superpositionsprinzip Innerhalb eines Bezugssystems gilt das Superpositionsprinzip: Gleichzeitig ablaufende Bewegungen eines Körpers beeinflussen sich gegenseitig nicht. Die Bewegungen können, ohne daß sich am Ergebnis etwas ändert, auch einzeln nacheinander ablaufen. Die momentane Geschwindigkeit eines Körpers ergibt sich aus der vektoriellen Summe der Geschwindigkeiten der Teilbewegungen. r r r r v i ( t ) = v ix i + v iy j + v iz k r n r v = ∑ vi i =1 r v1 r v r v2 Galileitransformation und Additionstheorem der Geschwindigkeiten Koordinatensysteme, die sich relativ zueinander mit geradlinig gleichförmiger Geschwindigkeit vr bewegen, heißen Inertialsysteme. Für diese Systeme gilt im Rahmen der klassischen Mechanik beim Übergang von einem Koordinatensystem in ein anderes Bezugssystem die Galileitransformation sowie das Additionstheorem der Geschwindigkeiten. Es seien A und B zwei Systeme, die sich relativ zueinander mit der konstanten Geschwindigkeit vr bewegen. Im System A (ungestrichenes System) seien die Koordinaten des Ortsvektors r mit (x,y,z) bezeichnet. Im System B (gestrichenes System) seien die Koordinaten des Ortsvektors r’ mit (x’,y’,z’) bezeichnet. Die Position eines Massenpunktes läßt sich zwischen B und A folgendermaßen umrechnen: Galileitransformation: r r r r = r '+ v r t Ein Massenpunkt, der bezüglich B die Geschwindigkeit u’ hat, bewegt sich bezüglich A mit der Geschwindigkeit Additionstheorem: r r r u = u '+ v r Das Additionstheorem folgt sofort aus der Galileitransformation durch Differentiation mit r r dr u= dt und r r dr ' u' = dt Es wird deutlich, dass dies so nur gilt, wenn die Zeit t keiner Transformation unterliegt, d.h. t=t’. Für die Beschleunigung, die Kraft und die Zeit ergeben sich beim Übergang von A nach B keine Änderungen, d.h. es gilt: a = a’ ; F = F’ ; t = t’ In Nichtinertialsystemen ( beschleunigten Bezugssystemen ) treten zusätzliche Kräfte, sogenannte Trägheitskräfte auf (Beispiel: Fliehkraft). Beschleunigung r Die Beschleunigung a gibt an, wie schnell ein Körper seine Geschwindigkeit ändert. Sie kann mittels folgender Relation definiert werden: r r r r ∆v dv r& a ( t ) = lim = = v( t ) = &r&( t ) ∆t →0 ∆t dt m s2 L T2 • Si - Einheit: • Dimension: • Die Beschleunigung ist die erste Ableitung der Geschwindigkeits-Zeit-Funktion und die zweite Ableitung der Weg-Zeit-Funktion. Die Beschleunigung ist ein Vektor: Länge: Betrag der Beschleunigung Richtung: Richtung der Beschleunigung Ist die Beschleunigung gegeben, so kann man die Geschwindigkeit durch Integration ermitteln: v t v0 t0 r r r r d v a ( t ' ) dt ' v ( t ) v = = − 0 (t 0 ) ∫ ∫