-1- KAP II. VEKTOREN UND KOMPLEXE ZAHLEN § 1. Vektoren
Werbung

-1KAP II. VEKTOREN UND KOMPLEXE ZAHLEN
§ 1. Vektoren
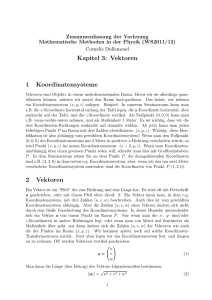
(1.1) Grundbegriffe.
Ein (dreidimensionaler) Vektor ist eine mathematische Größe, die aus einer Richtung im Raum
und einer nichtnegativen reellen Zahl, die man den Betrag des Vektors nennt, besteht.
Eine Richtung im Raum besteht aus einer Lage im Raum und einem Richtungssinn. Eine Lage
im Raum kann durch eine Gerade definiert werden. Zwei Geraden haben genau dann die gleiche
Lage, wenn sie zueinander parallel sind. Zwei Richtungen, welche die gleiche Lage, aber unterschiedlichen Richtungssinn haben, heißen einander entgegengesetzt.
Vektoren werden durch Überschreiben mit einem Pfeil bezeichnet, zum Beispiel:
den Betrag eines Vektors wird
oder kürzer a geschrieben.
. Für
Ein Vektor wird durch einen Pfeil veranschaulicht, dessen Richtung gleich der Richtung des
Vektors und dessen Länge gleich dem Betrag des Vektors ist. Hat der einen Vektor darstellende Pfeil den Anfangspunkt A und den Endpunkt B, schreibt man dafür
Weil ein Vektor
nur aus Richtung und Betrag besteht, gibt es unendlich viele Pfeile, die ihn darstellen; sie sind
alle gleich lang und gleichsinnig parallel zueinander.
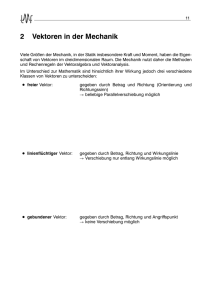
Beispiele: Folgende physikalische Größen sind Beispiele für Vektoren:
-
: geradlinige Verschiebung von A nach B;
-
: Geschwindigkeit in Richtung von A nach C;
-
: Kraft mit Richtung von A nach D;
: Länge der Verschiebung [m].
: Größe der Geschwindigkeit [m/s].
: Stärke der Kraft [N].
Richtung (G 2) ' & Richt. (G 1)
Beispiele aus der Physik
Der mit bezeichnete Nullvektor ist der (einzige) Vektor, dessen Betrag gleich der Zahl 0 ist,
der also durch
definiert ist. Für jeden Punkt A im Raum ist
ein darstellender Pfeil ist somit zu einem Punkt entartet.
Ein Vektor heißt normiert oder ein Einheitsvektor, wenn sein Betrag gleich der Zahl 1 ist. Für
einen Einheitsvektor schreiben wir meistens .
Zu jedem Vektor
ist der ihm entgegengesetzte Vektor
definiert als der Vektor, dessen
Richtung der von
entgegengesetzt und dessen Betrag gleich dem von
ist.
-2-
Einheitsvektor
zu
entgegengesetzter Vektor
(1.2) Algebraische Operationen mit Vektoren.
Summe und Differenz von Vektoren
Seien
zwei Vektoren. Durch Parallelverschiebung eines der die beiden Vektoren darstellenden Pfeile kann immer erreicht werden, dass der Endpunkt des Pfeils von mit dem Anfangspunkt des Pfeils von übereinstimmt, so dass dann
und
mit geeigneten
Punkten A, B und C gilt.
(1.2.1) Definition: Für zwei Vektoren
ist die Summe
definiert durch
,
sofern
und
.
(1.2.2) Satz: Für (beliebige) Vektoren
gilt:
(AV 1)
(Kommutativgesetz).
(AV 2)
(Assoziativgesetz).
(AV 3)
(Gesetz vom neutralen Element).
(AV 4) Es gibt genau einen Vektor
mit
(Gesetz vom inversen Element).
Die gemäß (AV 4) eindeutig bestimmte Lösung der (Vektor-) Gleichung
der zu entgegengesetzte Vektor.
(1.2.3) Definition: Für zwei Vektoren
der Gleichung
.
ist die Differenz
ist
definiert als die Lösung
-3(1.2.3N) Satz: Für zwei Vektoren
gilt:
.
Parallelogrammkonstruktion von
und
Produkt eines Skalars mit einem Vektor
Unter einem Skalar versteht man eine reelle Zahl. Der Ausdruck stammt aus der Physik.
(1.2.4) Definition: Für eine Zahl t 0 ú und einen Vektor ist das mit
oder
Produkt von t mit definiert als der Vektor mit den folgenden Eigenschaften:
(1)
und, sofern t … 0,
(2) Richtung
' Richtung
für t > 0, ' & Richtung
für t < 0.
Der Fall t ' 0 ist schon mit der Eigenschaft (1) erfasst. Danach gilt:
für t > 0
(1.2.5) Satz: Für Vektoren
bezeichnete
so dass
für t < 0
und Zahlen s, t 0 ú gilt:
(MSV 1)
(MSV 2)
(MSV 3)
(MSV 4)
(1.3) Koordinatendarstellung.
Die Definitionen der Summe und der Differenz von Vektoren sowie des Produkts eines Skalars
mit einem Vektor sind rein geometrisch. Demnach können diese Größen höchstens gezeichnet
werden, berechnen lassen sie sich damit aber noch nicht. Dies gelingt erst mit der Einführung
eines Koordinatensystems im Raum.
-4Wir führen ein kartesisches Koordinatensystem ein. Es besteht
aus drei zueinander senkrechten Achsen, die sich in einem
Punkt, dem so genannten Koordinatenursprung O schneiden.
Sie werden mit (1), (2) und (3), manchmal auch mit x, y und z
beschriftet. Jede Achse ist eine Kopie der Zahlengeraden und
hat somit eine Richtung. Unser Koordinatensystem soll ein
Rechtssystem sein, das heißt, die (3) - Achse weise in die Richtung, in die sich eine rechtsgängige Schraube bei der Drehung,
welche die (1) - auf kürzesten Wege in die (2) - Achse überführt, bewegen würde,.
Die drei Koordinatenachsen definieren eindeutig drei Einheitsvektoren, die so genannten Koordinateneinheitsvektoren
und
die wie die (1), (2) und (3) - Achse gerichtet sind. Sei nun
irgendein Vektor. Wir stellen ihn durch einen im Koordinatenursprung O beginnenden Pfeil dar.
Der Endpunkt A dieses Pfeils und mit ihm seine Koordinaten a1, a2, a3 sind dann durch eindeutig bestimmt. Es ist
Aus diesen Skizzen liest man ab, dass
(1.3.1)
.
Die Zahlen a1, a2, a3, also die Koordinaten des Punktes A, nennt man auch die Koordinaten des
Vektors , und die Summendarstellung (1.3.1) heißt Koordinatendarstellung von bezüglich des
eingeführten Koordinatensystems. Betrachtet man dieses als fest, ist der Vektor durch seine drei
Koordinaten in der Reihenfolge a1, a2, a3, d. h. durch das Zahlentripel (a1, a2, a3) eineindeutig und
vollständig dargestellt. Aus rechentechnischen Gründen verwendet man dazu aber an Stelle des
Tripels (a1, a2, a3), das übrigens schon zur Darstellung des Punktes A gebraucht wird, meistens
lieber die Spalte
In einem fortlaufenden Text schreibt man diese aus Gründen der Platzersparnis auch in der Form
oder
.
Das hochgestellte T steht dabei für die so genannte Transposition, die aus einer Spalte eine Zeile
und aus einer Zeile eine Spalte macht. Sie spielt in der Linearen Algebra (Kap. IV) eine wichtige
-5Rolle. Anstatt von (1.3.1) - und damit gleichbedeutend - schreibt man nun kurz einfach
(1.3.2)
oder
oder
Weil ein Vektor durch sein Koordinatentripel (a1, a2, a3) eineindeutig und vollständig beschrieben wird, bezeichnet man die Menge aller (dreidimensionalen) Vektoren genauso wie Menge aller
reellen Zahlentripel, d. h.:
ist ein (dreidimensionaler) Vektor}.
(1.3.3) Definition:
0 ú 3 mit
(1.3.4) Satz: Seien
und sei t 0 ú. Dann gilt:
1)
2)
(1.4) Betrag.
(1.4.1) Satz: Für
0 ú 3 mit
(1.4.2) Satz: Für
gilt:
0 ú 3 und t 0 ú gilt:
1)
2)
(Dreiecksungleichung).
(1.5) Skalarprodukt.
Das Skalarprodukt
von zwei Vektoren
0 ú 3 hängt von dem Winkel
zwischen
und ab, welcher zunächst nur dann definiert ist, wenn beide Vektoren vom Nullvektor verschieden sind. Um für das Folgende lästige Fallunterscheidungen zu vermeiden, definieren wir ihn
auch für den Fall, dass oder gleich ist:
(1.5.1) Definition:
für
(1.5.2) Definition: Für zwei Vektoren
Zahl
oder
0 ú 3 ist das Skalarprodukt
wobei
definiert als die reelle
-6Für den Winkel
gilt immer 0 # n # B.
0 ú 3 gilt:
(1.5.3) Satz: Für
1)
oder, gleichbedeutend damit:
2)
3)
(senkrecht oder orthogonal zueinander).
Nach Definition (1.5.1) wird der Nullvektor
als orthogonal zu jedem anderen Vektor betrachtet.
Für die drei Koordinateneinheitsvektoren gilt offensichtlich:
(1.5.4) Satz:
(i, j ' 1, 2, 3).
0 ú 3 und t 0 ú gilt:
(1.5.5) Satz: Für
1)
(Kommutativgesetz).
2)
und
3)
.
(1.5.6) Satz (Formel für
): Für
(Distributivgesetz).
0 ú 3 mit
und
gilt:
.
Aufgabe: Man berechne den Winkel zwischen den Vektoren
Lösung: Aus der Definition des Skalarprodukts
und
folgt für
Aber:
Daher:
(1.6) Vektorprodukt.
Das Skalarprodukt von zwei Vektoren ist eine Zahl, ihr Vektorprodukt ist dagegen wieder ein
Vektor.
(1.6.1) Definition: Für zwei Vektoren
Vektor mit den folgenden Eigenschaften:
(1)
(2)
wobei
0 ú 3 ist das Vektorprodukt
definiert als der
-7(3)
hat die Richtung, in die sich eine rechtsgängige Schraube bei der Drehung, die
dem kürzesten Weg in überführt, bewegen würde (sog. Rechtsschraubenregel).
auf
Kommentare:
Zu (1):
lelogramms (s. Skizze oben links).
Zu (2): Wegen (1) und (2) kommen für
Flächeninhalt des von
und
aufgespannten Paral-
nur noch zwei Vektoren in Frage, die einander ent-
gegengesetzt sind. Durch die Eigenschaft (3) wird eindeutig festgelegt, welcher der beiden das
Vektorprodukt
ist.
(1.6.2) Satz: Für (alle)
1)
0 ú 3 gilt:
2)
(1.6.3) Satz: Für die drei Koordinateneinheitsvektoren gilt:
und
Es genügt, wenn man sich die erste dieser drei Gleichungen einprägt, weil die zweite aus der
ersten und die dritte aus der zweiten durch eine zyklische Vertauschung der Indizes 1, 2, 3 gemäß
dem Zyklus 1 6 2 6 3 6 1 hervorgeht.
0 ú 3 und t 0 ú gilt:
(1.6.4) Satz: Für
1)
(kein Kommutativgesetz).
2)
und
3)
.
(1.6.5) Satz (Formel für
): Für
(Distributivgesetz).
0 ú 3 mit
und
Wer den Begriff der Determinante kennt, kann sich diese Formel leicht merken.
(1.6.6) Definition: Für a, b, c, d 0 ú heißt die reelle Zahl
gilt:
-8die Determinante des quadratischen Zahlenschemas (auch: der quadratischen Matrix)
.
(1.6.7) Merkregel (für die Formel (1.6.5)): Für die Koordinaten c 1, c 2, c 3 des Vektors
gilt:
(Minuszeichen!),
Beispiel:
denn:
0 ú 3 heißen kollinear (Symbol:
(1.6.8) Definition: Zwei Vektoren
existiert, so dass
oder
mit t … 0 Y
.
wobei s ' 1/ t
Man beachte hierzu, dass der Nullvektor
(1.6.9) Satz: Für
(1.6.10) Satz: Für
), wenn ein t 0 ú
wegen
; aber:
œs0ú
mit jedem Vektor
0 ú 3 kollinear ist.
0 ú 3 gilt:
0 ú 3 gilt:
1)
2)
Aus diesem Satz folgt, dass i. Allg.
d. h., das Vektorprodukt ist nicht assoziativ. Bei einem mehrfachen Vektorprodukt müssen daher
immer Klammern gesetzt werden.
(1.7) Spatprodukt.
Skalar- und Vektorprodukt sind für zwei, das Spatprodukt ist für drei Vektoren definiert.
-9-
0 ú 3 ist das Spatprodukt
(1.7.1) Definition: Für drei Vektoren
reelle Zahl
definiert als die
Die Vektoren
spannen einen so genannten Spat (auch: Parallelflach oder Parallelepiped)
auf. Seien V sein Volumen, h seine Höhe und F der Flächeninhalt des von und aufgespannten Parallelogramms. In jedem der zwei skizzierten Fälle gilt dann:
Ferner ist mit
im
- linken Bild:
- rechten Bild:
In jedem Fall gilt daher:
(1.7.2) Satz: Für drei Vektoren
1)
0 ú 3 gilt:
komplanar (d. h.:
und
liegen alle in einer Ebene).
2)
d. h., das Spatprodukt ist invariant gegenüber einer zyklischen
Vertauschung seiner Faktoren gemäß dem Zyklus
3)
d. h. das Spatprodukt ist eine alternierende
Funktion seiner drei Faktoren: vertauscht man zwei davon und lässt man dabei den dritten auf
seinem Platz, ändert es sein Vorzeichen.
Für die Hörerinnen und Hörer, die schon den Begriff der (3, 3) - Determinante kennen, noch die
folgende Mitteilung:
wobei die ai, bi und ci die Koordinaten von
systems bedeuten.
und
bezüglich eines kartesischen Rechts-
-10(1.8) Zweidimensionale Vektoren.
Bei nicht wenigen Problemen, die mit Hilfe der Vektorrechnung gelöst werden können, hat man
nur mit Vektoren zu tun, die alle in einer bestimmten, von der Problemstellung vorgegebenen
Ebene liegen. Führt man ein dreidimensionales Koordinatensystem so ein, dass diese Ebene zur
(1), (2) - Koordinatenebene wird, so sind dies die Vektoren mit einer verschwindenden dritten
Koordinate, d. h. mit einer Koordinatendarstellung der Form
Kommen bei der Problemlösung nur solche Vektoren vor, kann man ihre dritte Koordinate, die
dann ja immer gleich 0 ist, ignorieren, so dass diese Vektoren nur noch die zwei Koordinaten a 1
und a 2 haben. Man bezeichnet sie deshalb als zweidimensional und schreibt für ihre Koordinatendarstellung kürzer
Die Menge der zweidimensionalen Vektoren entspricht nun der Menge aller reellen Zahlenpaare
(a 1, a 2). Daher:
Definition:
Für
ist ein zweidimensionaler Vektor}.
0 ú 2 und t 0 ú gilt:
und
d. h., die Menge ú 2 ist gegenüber den für Vektoren grundlegenden Operationen der Addition von
Vektoren und der Multiplikation eines Skalars mit einem Vektor abgeschlossen.
Für den Betrag eines Vektors
' (a1 a2)T 0 ú2 gilt:
.
Für das Skalarprodukt von zwei Vektoren
Das Vektorprodukt
0 ú 2 gilt:
führt i. Allg. aus der Menge ú2 hinaus, so dass ú2 gegenüber dieser
Operation nicht abgeschlossen ist. Weil man in der Mathematik auf eine solche Abgeschlossenheit aus verschiedenen Gründen einen Wert legt, gilt
für
0 ú2 als nicht definiert. Sollte
-11es erforderlich sein, kann man jedoch das Vektorprodukt
wobei c :' a1 b2 & a2 b1 ,
bilden. Dann betrachtet man aber
nicht mehr als zwei-, sondern als dreimensionale Vek-
toren mit den dritten Koordinaten a3 ' b3 ' 0.
(1.9) Analytische Geometrie des Raums.
Es werden einige Probleme der Analytischen Geometrie des Raums mit Hilfe der Vektorrechnung gelöst. Die Grundidee dabei ist, dass man die Punkte des Raums durch ihre Ortsvektoren
beschreibt.
Er hat dieselben
Unter dem Ortsvektor eines Punktes A 0 ú3 versteht man den Vektor
Koordinaten wie der Punkt A (vgl. Abschn. (1.3)). Punkte werden im Folgenden immer mit
großen Buchstaben bezeichnet, ihre Ortsvektoren stets mit den entsprechenden kleinen.
Für einen beliebigen Punkt auf einem gerade zu untersuchenden geometrischen Gebilde, etwa
einer Geraden oder Ebene, schreiben wir meistens R. Die Koordinaten eines solchen Punktes R,
und damit die seines Ortsvektors
werden traditionellerweise mit x, y und z bezeichnet.
Eine Formel, die im Folgenden immer wieder gebraucht wird:
(1.9.1) Formel: Für zwei Punkte A, B 0 ú3 gilt:
wobei
die Ortsvektoren der beiden Punkte bedeuten.
Ortsvektor von R
(1.9.2) Die Gerade:
Seien G eine Gerade im Raum, A ein Punkt auf G und
ein Richtungsvektor von G, d. h. ein
Vektor mit
und
(parallel zu G; s. Bild unten links) . Weil mit offensichtlich auch
für jedes t 0 ú\{0} ein Richtungsvektor von G ist, hat eine Gerade immer unendlich viele Richtungsvektoren.
Gleichung von G:
(Parameterform).
Diese Gleichung ist so zu verstehen: ein Punkt R 0 ú3 liegt genau dann auf G, wenn sein Ortsvek-
-12tor in der Form
mit einem von ( abhängigen) t 0 ú darstellbar ist. Die Größe t nennt
man in diesem Zusammenhang einen Parameter.
(1.9.3) Abstand eines Punktes von einer Geraden:
Seien G, A und
wie in (1.9.2) und sei P irgendein Punkt im ú3. P0 bezeichne den Fußpunkt des
Lots von P auf G und d (P, G) den Abstand von P zu G, d. h. die Länge des Lots von P auf G. Es
gilt: d (P, G) '
(s. Bild unten rechts).
Formeln:
1) Abstand von P zu G:
2) Ortsvektor von P0:
wobei
Gerade durch A mit Richt.vektor
d(P,G): Abstand von P zu G
(1.9.4) Die Ebene:
Seien E eine Ebene im Raum, A ein Punkt auf E und
ein Normalenvektor von E, d. h. ein Vek-
tor mit
und
(senkrecht zu E; s. Bild unten links). Mit ist auch
für jedes t … 0
ein Normalenvektor von E. Zu einer Ebene gibt es daher immer unendlich viele Normalenvektoren.
Ebene durch A mit Norm.vektor
Gleichung von E:
wobei
d(P,E): Abstand von P zu E
(Vektorgleichung).
Die Ebene E besteht demnach aus allen Punkten R 0 ú3, für die das Skalarprodukt
gleich d ist. Weil A in E liegt, muss die Konstante d gleich
sein.
Bezeichnet man die Koordinaten von mit a, b, c und rechnet man das Skalarprodukt
so nimmt die Gleichung von E die folgende Form an:
konstant
aus,
-13Gleichung von E:
(Koordinatengleichung).
(1.9.5) Abstand eines Punktes von einer Ebene:
Sei E die Ebene mit der Gleichung
wobei und d gegeben. Für einen Punkt P im ú3
bezeichne P0 den Fußpunkt des Lots von P auf E und d (P, E) den Abstand von P zu E. Dieser ist
definiert als die Länge des Lots von P auf E. Es gilt: d (P, E) '
(s. Bild oben rechts).
Formeln:
1) Abstand von P zu E:
2) Ortsvektor von P0 :
wobei
(1.9.6) Die Kugeloberfläche (Sphäre):
Sei S die Oberfläche der Kugel mit dem Mittelpunkt R0 ' (x0, y0, z0) und dem Radius D.
Gleichung von S:
(Vektorgleichung).
Drückt man die linke Seite dieser Gleichung durch die Koordinaten x, y, z von und x0, y0, z0
von (Ortsvektor von R0) aus und quadriert man auf beiden Seiten der Gleichung, ergibt sich:
Gleichung von S:
(Koordinatengleichung).
Wichtiger Spezialfall: Mittelpunkt R0 ' O ' (0, 0, 0). Dann hat S die Gleichung
bzw.
(1.10) Analytische Geometrie der Ebene:
Die Idee, Punkte durch ihre Ortsvektoren zu beschreiben, kann natürlich auch auf Probleme der
Analytischen Geometrie der Ebene angewandt werden. Leiten wir damit die gängigsten Formen
der Gleichung einer Geraden und eines Kreises in der Ebene her. Ein beliebiger Punkt auf einer
Geraden oder einem Kreis wird wieder mit R bezeichnet, sein Ortsvektor mit und seine Koordinaten bezüglich eines kartesischen Koordinatensystems der Ebene mit x und y, d. h.:
R ' (x, y) und
-14Die Gerade
Eine Gerade G in der Ebene kann nicht nur durch einen Richtungs-, sondern auch einen Normalenvektor und einen Punkt auf ihr eindeutig beschrieben werden. Dementsprechend hat man zwei
Formen der
(1.10.1) Vektorgleichung von G:
1)
t 0 ú (Parameterform);
2)
(parameterfreie Form).
Dabei ist
G.
und
der Ortsvektor eines Punktes auf G,
2
sind Vektoren aus ú mit
ein Richtungs- und
ein Normalenvektor von
und
Mit Hilfe des folgenden Satzes kann man leicht von einer der zwei Formen der Vektorgleichung
von G zur anderen übergehen.
0 ú2. Dann ist
(1.10.2) Satz: Sei
orthogonal zu
Beweis:
Genauer entsteht
Y Behauptung.
aus
durch Drehung von
Bezeichnen wir die Koordinaten von
Vektorgleichung von G wie folgt:
m
um %90°.
mit B und C, schreibt sich die parameterfreie Form der
] Bx % Cy '
] B x % C y % D ' 0,
wenn man D :' &
setzt. Das ist die so genannte implizite Form der Koordinatengleichung von
G. Weil
ist B … 0 oder C … 0. Falls C … 0, kann man die implizite Form nach y auflösen
mit dem Ergebnis
] y ' a x % b,
wobei a :' & B/C und b :' & D/C. Ist C ' 0, muss B … 0 sein, so dass die implizite Form nach x
aufgelöst werden kann, was ergibt:
] x ' x0
mit x0 :' & D/B. Die Gerade G ist dann parallel zur y - Achse. Die nach y oder x aufgelöste Form
nennt man die explizite Form der Koordinatengleichung von G. Fassen wir zusammen:
-15(1.10.3) Koordinatengleichung von G:
1) B x % C y % D ' 0 (implizite Form; B … 0 oder C … 0);
2) y ' a x % b oder x ' x0 (explizite Form).
Beispiel: Sei G die Gerade durch den Punkt A '
(&1, 1) mit dem Richtungsvektor
Mit (1.10.1, 1) erhält man sofort die
Parameterform der Vektorgleichung von G:
t 0 ú.
Nach (1.10.2) ist
ein Normalenvektor von G. Weil
ist die
Parameterfreie Form der Vektorgleichung von G:
Rechnet man das Skalarprodukt auf der linken Seite dieser Gleichung aus, resultiert die
Implizite Form der Koordinatengleichung von G: & x % 2 y & 3 ' 0.
Löst man nach y auf, bekommt man schließlich die
Explizite Form der Koordinatengleichung von G:
Der Kreis
Sei K der Kreis mit dem Mittelpunkt R0 ' (x0, y0) und dem Radius D. Ein Punkt R ' (x, y) liegt
genau dann auf K, wenn d(R0, R), der Abstand von R zu R0, gleich dem Radius D ist. Weil
d(R0, R) '
(s. rechtes Bild), folgt für die
(1.10.4) Vektorgleichung von K:
Drückt man
durch die Koordinaten x, y und x0, y0 von
auf beiden Seiten der Gleichung entsteht die
bzw.
aus und quadriert man
(1.10.5) Koordinatengleichung von K (Form 1): (x & x0)2 % (y & y0)2 ' D2.
Rechnet man die Quadrate auf der linken Seite mit der binomischen Formel aus, ergibt sich:
(1.10.5N) Koordinatengleichung von K (Form 2): x2 % y2 % B x % C y % D ' 0.
-16Beispiel: Sei K der Kreis mit dem Mittelpunkt R0 ' (&2, 1) und dem Radius D ' 3. Dann ist
(x & (&2))2 % (y & 1)2 ' 32 ] (x % 2)2 % (y & 1)2 ' 9
die erste Form der Koordinatengleichung von K. Quadriert man auf der linken Seite der Gleichung aus, erhält man
x2 % 4 x % 4 % y2 & 2 y % 1 ' 9 ] x2 % y2 % 4 x & 2 y & 4 ' 0
als zweite Form der Koordinatengleichung von K.
Ist ein Kreis durch die zweite Form seiner Koordinatengleichung gegeben, führt man diese mit
Hilfe je einer quadratischen Ergänzung für die x - und die y - Glieder in die erste Form über, aus
der man dann den Mittelpunkt und den Radius des Kreises ablesen kann. In der zweiten Form sind
x2 und y2 oft noch mit einem gemeinsamen Faktor multipliziert.
Beispiel: Zu bestimmen seien der Mittelpunkt und der Radius des Kreises mit der Gleichung
(()
Auf der linken Seite werden die x - und die y - Glieder quadratisch ergänzt. Damit:
Der Kreis hat den Mittelpunkt R0 ' (3/2, &2) und den Radius
-17§ 2. Komplexe Zahlen
(2.1) Definition der komplexen Zahlen.
Zunächst wird eine neue Rechengröße, die so genannte imaginäre Einheit j eingeführt. Sie ist
definiert durch die Forderung, dass
j 2 ' &1
(2.1.1)
sein soll. Natürlich kann j keine reelle Zahl sein. Sodann werden formale Summen der Form
a1 % j a2,
wobei a1 0 ú und a2 0 ú, gebildet. Solche Summen nennt man komplexe Zahlen. Schließlich wird
festgelegt, wie mit diesen Summen, also den komplexen Zahlen gerechnet werden soll. Das ist
sehr einfach:
(2.1.2) Definition: Sofern nur die vier Grundrechnungsarten %, &, A und / vorkommen, wird mit
den komplexen Zahlen genauso wie mit den reellen gerechnet und dazu noch die Regel j 2 ' &1
beachtet.
Beispiele:
1)
Es wird gerechnet, als wäre j 0 ú.
2)
Wie2
der wird gerechnet, als wäre j 0 ú; dazu wird noch j ' &1 beachtet.
3)
Der gleiche
Kommentar wie zu 2). Die Gleichung (() folgt mit der Formel (a & b) (a % b) ' a 2 & b 2 .
Bezeichnungen:
Komplexe Zahlen: a ' a1 % j a2 ,
b ' b1 % j b2 , . . ., z ' x % j y, w ' u % j v.
Menge der komplexen Zahlen: ÷.
a1 (0 ú) heißt der Realteil, a2 (0 ú) der Imaginärteil der komplexen Zahl a ' a1 % j a2 . Man
schreibt dafür: a1 ' Re (a) und a2 ' Im (a).
Weil sich eine reelle Zahl a in der Form a ' a % j 0 darstellen lässt, ist jede reelle auch eine komplexe Zahl. Daher: ú d ÷. Die Zahlenmenge ú wurde zur Zahlenmenge ÷ erweitert.
Man kann leicht nachprüfen, dass mit der die Durchführung der vier Grundrechnungsarten in ÷
regelnden Definition (2.1.2) die von Kap. 0, § 2 her bekannten Körperaxiome erfüllt sind, d. h. für
beliebige Zahlen a, b, c 0 ÷ gilt:
(A1)
(A2)
(A3)
a%b ' b%a
(a % b) % c ' a % (b % c)
a%0 ' a
(A4)
Es gibt genau ein z 0 ÷ mit a % z ' 0
(Kommutativgesetz).
(Assoziativgesetz).
(Gesetz vom neutralen Element).
(Gesetz vom inversen Element).
-18(M1)
(M2)
(M3)
ab ' ba
(a b) c ' a (b c)
a1 ' a
(Kommutativgesetz).
(Assoziativgesetz).
(Gesetz vom neutralen Element).
(M4)
Sofern a … 0, gibt es genau ein z 0 ÷ mit a z ' 1
(D)
a (b % c) ' a b % a c
(Gesetz vom inversen Element).
(Distributivgesetz).
Die Lösungen z der Gleichungen in (A 4) und (M 4) sind natürlich z ' &a bzw. z ' a& 1 ' 1/a .
Weil in ÷ genauso wie in ú die Körperaxiome erfüllt sind, und weil alle die vier Grundrechnungsarten betreffenden Rechengesetze allein aus den Körperaxiomen folgen (vgl. Kap. 0, § 2),
gelten diese Gesetze in ÷ genauso wie in ú. Dazu gehören auch die Gesetze für das Potenzieren
mit einem ganzzahligen Exponenten, weil eine Potenz a k, wobei k 0 , für k > 0 nur ein Produkt
und für k < 0 nur der Kehrwert eines Produkts ist. So gilt zum Beispiel auch für a, b 0 ÷:
- a 0 ' 0,
- a b ' 0 ] a ' 0 w b ' 0,
- (a ± b) 2 ' a 2 ± 2 a b % b 2,
- (a % b) (a & b) ' a 2 & b 2.
Bei Rechnungsarten, die von den vier Grundrechnungsarten und dem Potenzieren mit einem
ganzzahligen Exponenten verschieden sind, hat man dagegen in ÷ Rechengesetze zu befolgen,
die sich von den entsprechenden in ú zum Teil deutlich unterscheiden. Das gilt insbesondere für
das Radizieren (Wurzelziehen) und das Potenzieren mit einem nicht ganzzahligen Exponenten.
(2.1.3) Definition: Sei a 0 ÷ mit a ' a1 % j a2 . Dann heißt
1) a( :' a1 & j a2 die zu a konjugiert komplexe Zahl;
2) a rein imaginär, wenn a1 ' Re (a) ' 0, wenn also a ' 0 % j a2 ' j a2 mit a2 0 ú.
(2.1.4) Bemerkungen:
1) Es gilt:
i) a (rein) reell ] a2 ' Im (a) ' 0;
ii) a rein imaginär ] a1 ' Re (a) ' 0.
2) Der Trick zur Berechnung eines Kehrwerts oder eines Quotienten:
i)
ii)
(Vorauss.: a … 0).
(Vorauss.: b … 0).
Man erweitert also den Bruch mit der zum Nenner konjugiert komplexen Zahl.
Der folgende Satz ist sehr wichtig. Unter anderem führt er zu einer passenden zeichnerischen
Darstellung der komplexen Zahlen.
-19(2.1.5) Satz: Seien a, b 0 ÷ mit a ' a1 % j a2 und b ' b1 % j b2 . Dann gilt:
a ' b ] a1 ' b1 v a2 ' b2 .
Also: zwei komplexe Zahlen sind genau dann gleich, wenn sie in Real- und Imaginärteil übereinstimmen.
(2.2) Die Gaußsche Zahlenebene.
Aus dem Satz (2.1.5) folgt, dass eine Zahl a 0 ÷ durch das Zahlpaar (a1, a2) ' (Re (a), Im (a)) 0 ú2
vollständig und eineindeutig beschrieben wird. Zwei weitere mathematische Größen, die ebenfalls durch ein Zahlenpaar (a1, a2) vollständig und eineindeutig beschrieben werden, sind der
Punkt und der Vektor in der Ebene mit den Koordinaten a1, a2 bezüglich eines kartesischen Koordinatensystems. Also ist es nur naheliegend, wenn man eine Zahl a 0 ÷ genauso wie den Punkt
oder den Vektor mit den Koordinaten a1 ' Re (a) und a2 ' Im (a) in der mit einem kartesischen
Koordinatensystem ausgestatteten Ebene zeichnerisch darstellt. Man spricht dann von der Punktbzw. Vektordarstellung von a und bezeichnet die dafür verwendete Ebene als die komplexe
Ebene oder Gaußsche Zahlenebene . Die beiden Koordinatenachsen nennt man dann die reelle
und die imaginäre Achse.
Punkt- und Vektordarstellung der komplexen Zahlen 1, j, 1 % 2 j und a ' a 1 % j a 2
Zu einer Zahl a ' a1 % j a2 0 ÷ betrachten wir den Vektor
0 ú 2. Wählt man für a die
Vektordarstellung, so besteht zwischen a und anschaulich kein Unterschied. Beide Größen
werden zeichnerisch durch denselben Vektorpfeil dargestellt und entsprechen so einander vollkommen. Wir schreiben dafür
. Diese Beziehung zwischen den komplexen Zahlen und den
zweidimensionalen reellen Vektoren überträgt sich auch auf die algebraischen Operationen der
Addition und Subtraktion sowie der Multiplikation mit einer reellen Zahl, denn:
und
für alle t 0 ú.
Das heißt aber, dass man die komplexen Zahlen a ± b und t a zeichnerisch genauso erhält wie die
Vektoren
und
:
------------------------------------------------
-
---------------
-20-
Im
Im
ta (t > 0)
Re
Parallelogrammkonstruktion
Den eine Zahl ~
E
ta (t < 0
C darstellenden Vektorpfeil nennt man übrigens in der Elektrotechnik gerne
den Zeiger von ~ .
Zusammenhang zwischen {l und {l * :
Wie die Skizze zeigt, erhält man ~ *, die zu ~ konjugiert
komplexe Zahl, durch Spiegelung von ~ an der reellen
Im
Achse. Daraus folgt sofort:
(~*)* = ~.
Re
- ~ rein reell
<=>
~
*
=~.
~1
- ~ rein imaginär
<=>
(2.3) Polarkoordinaten
~
*
-~
= - ~.
steht man die in der Skizze eingezeichneten reellen Größen
cx..
Im
~+_mmmm
~ a
Man nennt sie den Betrag und das Argument
3'> Re
(auch: Winkel) von ~ und schreibt dafür:
I~
a*
einer komplexen Zahl.
Unter den Polarkoordinaten einer Zahl ~ = al + j a2 E C vera und
+_h __.. m .. _.hm"";
I
=
a und arg (~) =
cx. •
Der Betrag a ist die Länge des ~ darstellenden Vektorpfeils
und damit gleich dem Betrag des ~ entsprechenden Vektors ä (s. Abschn. (2.2)).
Das Argument
cx.
ist der (vorzeichenbehaftete)
Winkel einer Drehung, welche die reelle Achse in
die Richtung von ~ überführt. (Im obigen Bild ist
daher
cx.
cx.
entgegen dem Uhrzeigersinn gerichtet und
> 0). Es ist nur bis auf ein ganzzahliges Vielfaches von 2n eindeutig bestimmt, d. h.:
arg (~)
=
cx.
=-
arg (~)
=
cx.
+
2kn für jedes k
Bezeichnungen:
Komplexe Zahl:
~ = al + j a2 ,
Z;=X+JY;
Betrag davon:
a,
r',
Argument davon:
cx.,
ß,
<po
E
Z.
-21(2.3.1) Formeln
1) zur Berechnung von a,
a = J al2 + a22
,
cx
=
aus a [, a2:
cx
{arctan
(~/al); +alTI;> al
0, < O.
arctan (a2/al)
2) zur Berechnung von a [, a2 aus a,
al = a cos cx ,
~
=
cx:
a sm cx .
ImA\
:3>
Re ( . ) > 0
=>
-1t 12
Re
:3>
< arg ( . ) < 1t 12
Re (- ) < 0
=>
1t 12
Re
< arg ( . ) < 31t /2
Im Fall a[ (= Re (f!:))< 0 liegt f!:in der linken, im Fall a[ > 0 in der rechten Halbebene. Ist a[ = 0,
befindet sich f!:auf der imaginären Achse, und arg (f!:)ist dann gleich
für
a2
TI 12
für ~ > 0, gleich
3TI
/2
< O.Für f!:= 0 ist arg (f!:)nicht definiert.
(2.3.2) Polare (auch: trigonometrische) Form einer komplexen Zahl:
.a
=
a (cos cx + j sin cx), wobei a = If!:I,
cx
=
arg (f!:).
Die bisher verwendete Form einer komplexen Zahl (Realteil + j .Imaginärteil) nennt man dagegen die algebraische Form. Also:
(2.3.3) Algebraische (auch: kanonische) Form einer komplexen Zahl:
.a
=
al + j a2, wobei a[ = Re (f!:),a2 = Im(f!:).
(2.4) Exponentialform einer komplexen Zahl.
(2.4.1) Definition (Eulersche Formel):
ejx:
=
cos
X +
j sin x
für alle x E R
Was hier eine Definition ist, war für Leonhard Euler (1707 - 1783) ein Ergebnis. Daher der Name
Eulersche Formel. ej x ist eine komplexe Zahl mit
I
ej x
I
=
1 und arg (e j X)
=
x.
Sie liegt auf dem Einheitskreis, d. h. dem Kreis in der komplexen Ebene mit dem Mittelpunkt 0
und dem Radius 1.
(2.4.2) Exponentialform einer komplexen Zahl:
.a
= aeja,
wobei a = 1f!:1,cx = arg
(cx).
-22-
Im!1l.
··''.\:=aeja
4Re
a
7Re
-1
-j
Eulersche Formel
Exponentialform
von ~
Der Satz (2.1.5) zeigt, wie zwei komplexe Zahlen in der algebraischen Form zu vergleichen sind,
der nächste Satz deckt auf, wie das in der Exponentialform geht.
(2.4.3) Satz: Seien a, b, a, ß
aeja
E IR
=bejß
mit a, b > O. Dann gilt:
-
a=b
a=ß+2kn,wobeikEZ.
1\
Das heißt: zwei komplexe Zahlen sind genau dann gleich, wenn sie denselben Betrag haben und
ihre Argumente (Winkel) bis auf ein ganzzahliges Vielfaches von 2n übereinstimmen.
Zunächst ist e j x, wobei x
genauer, dass mit ej
x
E IR,
nur eine Abkürzung für cos x + j sin x . Dass e j x mehr als das ist,
tatsächlich wie mit einer richtigen Potenz gerechnet werden kann, ist der
Inhalt der folgenden zwei Sätze.
(2.4.4) Satz: Seien x, y
1= 2kn,
xejx
wobei
ejO
=1.
e~x
=. ej(x
= -jx
ej(x+y).
-y). k
-. 1) =ejxejy
e =1
-
Dann gilt:
Z. 5)
eJx
3)2)
E IR.
E
(2.4.5) Satz: Seien x, x l'
X 2' ..•
, X n E IR
und sei k
1) e jx!e jxz ... e jXn -_ e j(x!+xZ+·
.. +xn).
Die Voraussetzung k
E
Z. Dann gilt:
E
e
(jx)k
2)
_- e jkx .
Z ist für die Gültigkeit der Aussage 2) entscheidend. Ist sie nicht gegeben,
ist diese Aussage falsch.
In den nächsten zwei Sätzen geht es um die Multiplikation und Division von komplexen Zahlen.
Sie zeigen, dass sich diese zwei Rechnungsarten sehr schön veranschaulichen
(2.4.6) Satz: Seien f!, .12 E (Cmit If!I = a,
1) If!QI = ab
= alb
1.12
I
= b, arg (f!) = a und arg
arg(f!Q) = a + ß.
1\
1\ arg (f!IQ)
2)
1f!IQI
3)
If!kl = ak 1\ arg(f!k) = ka
4)
11If!1= lIa
1\
= a - ß (Vorauss.:
(Vorauss.: k
E
.12
Z).
arg(lIf!) = - a (Vorauss.: f!"* 0).
"*0).
(.12)
lassen.
= ß. Dann gilt:
-23(2.4.7) Satz: Sei f! E C mit If!I = a, arg (f!) =
1) If!ej <PI= a /\ arg (f!ej <P)=
2)
I f!j
I = a /\ arg (f!j) =
3)
I f!/ j I
=
cx
a /\ arg (f!/j) =
+
cx
TI
cx -
+
<p
cx
und sei
<p
E
JR.Dann gilt:
(Drehung um den Winkel
/2 (Drehung um den Winkel
TI
<p).
/2).
TI
/2 (Drehung um den Winkel -
/2).
TI
Imf.\
i1- aej'l'
.
I./~
"""Re
·····T··
\ a
i
:';'
\
a
I
\:-_ _",,"Re
----\:~-,J .i;!
I
Die folgenden zwei Formeln werden sehr oft gebraucht. Sie folgen direkt aus der Eulerschen Formel (2.4.1).
(2.4.8) Wichtige Formeln: Sei x E R Dann gilt:
1) cosx
=
iCejX
e-jX).
+
2)
sinx =
i/ejX-
e-jX).
(2.5) Betrag und koniugiert komplexe Zahl.
Im
(2.5.1) Bemerkung: Seien f!, Q E
1) If! -
QI
=
<C.
b
Dann gilt:
d (f!, Q): Abstand der Punkte f! und
Q
in der
/
komplexen Ebene.
2)
/
/
/ /~Ia-bl
~a
7
Re
If!I = d (f!,0): Abstand des Punktes f!vom Koordinatenursprung 0 in der komplexen Ebene.
(2.5.2) Satz (Gesetze für I . I): Seien f!, Q E C, sei k E Z. Dann gilt:
1)
labl
= lallbi.
3)
1- al = lai.
5)
lakl
= lalk
(Vor.: f! '* 0, wenn k < 0).
2)
la/bi
= lal/lbl
4)
111al
= 1I1al
6)
la
± 121 sial
(Vorauss.: Q '* 0).
(Vorauss.: f! '* 0).
+ 1121(Dreiecksungleichung).
Wendet man die Regeln 1) und 6) wiederholt an, ergibt sich:
(2.5.3)
Satz (Gesetze für
1)
laI a2 ••• an I =
2)
laI
± a2±· .. ±
I .
I): Seien f