Zusatz - Metrologie
Werbung

Metrologie
Wissenschaft und Technik des Messens
Kontakt mit dem Autor
© Copyright
ETH Zürich, Schweiz
Institut für Werkzeugmaschinen und Fertigung
Mitarbeit
d0000215; rev02
Modul
Schwingungen als Signale
Karl H. Ruhm
Inhalt
Einleitung
1
Beschleunigung, Geschwindigkeit und Weg
2
Kraft und Beanspruchung
3
Signalparameter
4
Signalauswertung
1
1
3
4
4
Schlüsselwörter
Schwingung, Ausschlag, Weg, Geschwindigkeit, Beschleunigung, Kraft, Moment, mechanische Spannung,
harmonisches Signal, periodisches Signal
Kurzbeschreibung
Unter Schwingungen versteht man Vorgänge, deren Größen man durch harmonische oder periodische Signale beschreiben kann. Verglichen mit Zufallsvorgängen sind die theoretischen Grundlagen relativ einfach,
solange lineare Beziehungen bei den beteiligten Prozessen angenommen werden können. Es werden einige
grundlegende Begriffe der Schwingungstechnik mechanischer Prozesse vorgestellt.
Einleitung
Schwingungen, insbesondere mechanische Schwingungen sind allgegenwärtig, Selbst der Mensch ist ein
schwingungsfähiger Prozess. Über mechanische Schwingungen hören und fühlen wir. In vielen Fällen sind
die Beziehungen zwischen den schwingenden Größen linear. Das heißt, die beschreibenden Signale, die die
schwingenden Größen repräsentieren, sind harmonische Signale beziehungsweise Linearkombinationen
harmonischer Signale (periodische Signale). Diese Signale sind über die Systemdynamik gekoppelt, die wir
durch gekoppelte Differenzialgleichungen beschreiben. Basis ist die Signal- und Systemtheorie (Zusatz →
Modul "Gundmodell des Masse-Dämpfer-Feder-Prozesses"; Zusatz → Beispiel "Mechanische Belastung eines schwingungsfähigen Prozesses durch Sensoren").
Schwingungen laufen in Raum und Zeit ab und viele können nur durch extrem komplexe Modelle beschrieben und durch aufwendige Instrumentierungen messtechnisch erfasst werden.
Modell eines schwingenden Balkens
1
Beschleunigung, Geschwindigkeit und Weg
Mechanische Schwingungen sind translatorische und / oder rotatorische Massenbewegungen bezüglich definierter Referenzpunkte (Bezugssystem). Sie entstehen bei mechanischen Prozessen normalerweise durch
äußere Krafteinwirkungen. Unter Schwingungen versteht man zunächst die zeitlichen Ausschläge (Schwingweg h(t) beziehungsweise Schwingwinkel α(t)). In erweitertem Sinne denkt man aber auch an die durch zeitliche Differenziation beziehungsweise Integration fest gekoppelten Größen Geschwindigkeit (Schwinggeschwindigkeit, Schnelle) v(t) und Beschleunigung a(t). Der mathematische Zusammenhang lautet ohne Berücksichtigung der Anfangswerte:
2
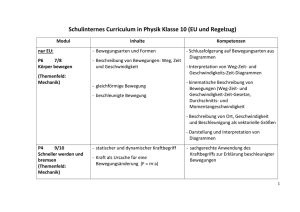
Definition: Zusammenhang zwischen Weg, Geschwindigkeit und Beschleunigung
∫
∫∫ a(t) dt
= ∫ a(t)dt
Weg
h(t)
= v(t)dt =
Geschwindigkeit
h(t)
= v(t)
Beschleunigung
h(t)
= v(t)
h(t) = v(t)
s
h(s)
..
h(t) = a(t)
.
h(t) = v(t)
1
s
2
s h(s) = a(s)
d
dt
s
s2 h(s) = a(s)
h0
h(t)
1
s
s h(s) = v(s)
[ms −2 ]
..
h(t) = a(t)
s h(s) = v(s)
v0
[ms −1]
B0907
d
dt
[m]
= a(t)
Signalwirkdiagramm .
h(t)
2
h(s)
Nur in einfachen Schwingungsfällen sind diese Zusammenhänge bei aufgezeichneten Signalverläufen evident. Sie sind aber bei der Definition von Messgrößen und bei der Wahl von Sensoren wichtig. Es bedeutet
nämlich nichts anderes, als dass die Messung einer einzigen der drei Größen genügt, da man die beiden
anderen jederzeit berechnen kann (modellbasiertes Messen). Auch im Frequenzbereich trifft dies zu: Aus
dem Spektrum einer gemessenen Größe können die Spektren der beiden anderen Größen berechnet werden. Leider gilt dies aber nur "im Prinzip".
Betrachten wir die Zusammenhänge am Beispiel der harmonischen Schwingung genauer. Da man sich periodische Schwingungen immer als Zusammensetzung harmonischer Schwingungen vorstellen darf (FourierSynthese), sind diese Betrachtungen allgemeiner Natur. Die Zusammenhänge zwischen Beschleunigung,
Geschwindigkeit und Weg lauten bei der rein harmonischen Schwingung folgendermaßen:
Definition: Zusammenhang zwischen Weg, Geschwindigkeit und Beschleunigung beim harmonischen Signal
Weg
∨
h(t) = hcos 2πft
∨
Geschwindigkeit v(t) = v sin2πft
∨
[m]
∨
∨
[ms −1]
mit v = 2πf h
∨
∨
Beschleunigung a(t) = − a cos 2πft mit a = (2πf)2 h
∨
[ms −2 ]
∨
Man sieht, dass bei konstantem Scheitelwert h des Weges h(t) der Scheitelwert v der Geschwindigkeit v(t)
∨
beziehungsweise der Scheitelwert a der Beschleunigung a(t) linear beziehungsweise quadratisch von der
Frequenz f abhängen.
Vorsicht
Unter diesen Gesichtspunkten ist es in der Praxis nicht zu empfehlen, mit einem Wegsensor den Weg
h(t) zu messen und diesen anschließend zweimal zu differenzieren. Dies hätte zur Folge, dass die immer auch vorhandenen, überlagerten, meist höherfrequenten Störsignale differenziert und damit unverhältnismäßig verstärkt würden. Dieses Phänomen ist dem Messpraktiker vertraut. Wenn man an Beschleunigungen interessiert ist, muss man Beschleunigungen messen! In umgekehrter Richtung sieht es
anders aus: Wenn man Beschleunigungen gemessen hat, kann man ohne weiteres diese ein- beziehungsweise zweimal integrieren, um zu den Geschwindigkeiten beziehungsweise zu den Ausschlägen
zu kommen. Allerdings gehen die Phasenlagen der Größen untereinander verloren, da die Anfangswerte
der Integration normalerweise unbekannt sind.
Die vorgestellten Beziehungen sind aus einem weiteren Grund interessant: Nehmen wir an, bei einem
schwingenden Prozess sei der zeitliche Verlauf des Ausschlags gemessen und dessen Spektrum durch
Fourier-Transformation bestimmt worden. Wir wissen, dass bei vielen praktischen Signalen die spektralen
Beiträge mit steigenden Frequenzen zurückgehen. Damit sind sie für Sensoren auch schwerer zu erfassen.
Nach den erwähnten Signaleigenschaften fällt aber das Spektrum der zugehörigen Geschwindigkeit und
insbesondere dasjenige der Beschleunigung mit steigenden Frequenzen weniger stark ab. Von daher gesehen kann es also bei einem Problem sinnvoll sein, nicht den Weg h(t), sondern die Beschleunigung a(t) zu
messen. Dies wird in der Praxis auch gemacht. Gleichzeitig ist zu beachten, dass bei niedrigen Frequenzen
der umgekehrte Effekt zu beobachten ist, dass die spektralen Beiträge der Geschwindigkeit und der Beschleunigung bei fallenden Frequenzen immer kleiner werden. Bei niedrigen Frequenzen sollte man Wege
messen!
3
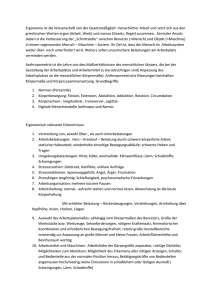
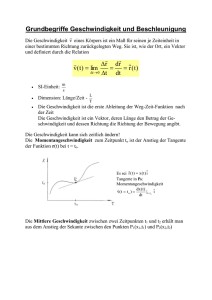
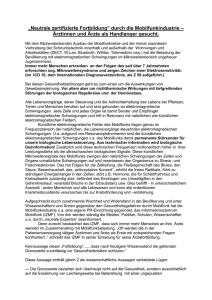
Grafischer Zusammenhang
Diese Zusammenhänge zwischen Beschleunigung, Geschwindigkeit und Weg findet man häufig in einem
logarithmisch skalierten Diagramm über der Frequenz dargestellt. Man sieht zum Beispiel, dass unter der
∨
Voraussetzung
konstanten Scheitelwertes v der Geschwindigkeit v(t) bei steigender Frequenz der Scheitel∨
∨
wert h des Weges h(t) abnehmen und der Scheitelwert a der Beschleunigung a(t) zunehmen muss.
1
10
4
10
–1
10
–2
–1
0
ch
–3
le
un
2
10
g
un
ig
10
/m
–4
–2
s
/m
h
a
eg
W
1
10
Geschwindigkeit v / m s
3
es
B
10
10
10
10
–1
10
0
10
–5
10
B0912
–2
10
10
0
1
3
2
10
10
10
Frequenz f / Hz
gut
brauchbar
noch
zulässig
unzulässig
B0913
Kleinmaschinen mittlere Maschinen Großmaschinen Turbomaschinen
K
M
G
T
Maschinengruppen
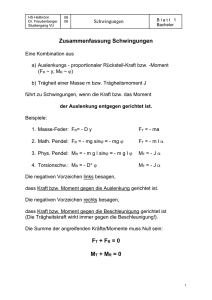
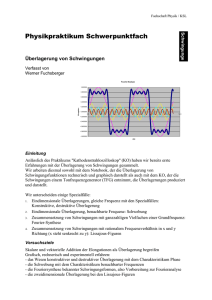
Anhand dieses Diagramms ist es dann auch möglich, zulässige Schwingungen zu definieren. Denn es dürfen allenfalls größere Ausschläge entstehen, wenn nur die Geschwindigkeiten oder die Beschleunigungen
klein bleiben. Es gibt auf dieser Basis Empfehlungen für gewisse Klassen von Prozessen.
Beurteilungsstufen
0,28 0,45 0,7 1,1 1,8 2,8 4,5 7
11 18 28
Effektivwert der Schwinggeschwindigkeit ψv [mm s–1 ]
Schwingungen
2
Kraft und Beanspruchung
Bei mechanischen Schwingungen treten zusätzliche Größen auf, die in erweitertem Zusammenhang (Newton-Beziehung) mit den Bewegungen stehen, nämlich Kräfte (Momente), sowie die davon abhängigen Materialspannungen. Kräfte stammen einerseits als Anregungskräfte von äußeren Quellen. Andererseits entstehen an und in den mechanischen Prozessen Beschleunigungs-, Dämpfungs- und Federkräfte als innere
Kräfte. Die Zusammenhänge zwischen Bewegungen und Kräften liefern die Beziehungen der Mechanik
(Zusatz → Beispiel "Belastung eines schwingungsfähigen Prozesses durch Sensoren").
4
Die von den Kräften abhängigen Materialspannungen sind zur Beurteilung der Funktionstüchtigkeit und der
Lebensdauer der Materialien interessant. Die Zusammenhänge erhält man aus der Festigkeitslehre mit den
Materialeigenschaften als Parameter.
Die Sensoren für Kräfte und Beanspruchungen sind klassische Kraft- und Dehnungssensoren (Zusatz →
Modul "Sensoren der Schwingungsmesstechnik").
3
Signalparameter
Es sind neben der Zeit t, der Frequenz f (Kreisfrequenz ω = 2πf) und der Phasenverschiebung ϕ verschiedene Parameter zur Quantifizierung der Größen im Zeit- und Frequenzbereich in Gebrauch. Theoretisch wären
an sich die Scheitelwerte aller spektralen Komponenten zu bevorzugen.
Da jedoch bei Zufallsvariablen keine Scheitelwerte definiert sind, kommen zusätzlich Kennwerte der Signaltheorie in Frage: arithmetischer Mittelungswert μ, Standardabweichung σ und Effektivwert (RMS-Wert) ψ.
Der Zusammenhang lautet für eine Variable x (Zusatz → Modul "Linearer Mittelungsoperator"):
ψ x 2 = μ x2 + σx 2
[{x}]
Diese Kennwerte gelten sowohl für deterministische als auch für zufällige Signale.
4
Signalauswertung
Zur Auswertung von Messsignalen stehen verschiedene Werkzeuge zur Verfügung. In Signalverarbeitungsgeräten können der Effektivwert ψa der Beschleunigung a(t) und durch Umrechnung auch die Effektivwerte
der Geschwindigkeit und des Weges als Zahlenwerte angezeigt werden. Damit ist eine erste Beurteilung von
Schwingungen möglich.
In anspruchsvolleren Geräten werden die Zeitsignale in den Frequenzbereich transformiert, insbesondere
durch die Fourier-Transformation. Dies führt zur Darstellung der Messresultate im Spektrum, dem Hauptbeurteilungsbereich der Schwingungen. Die Hauptmotivation liegt darin, dass sich im Zeitbereich überlagerte
Schwingungen verschiedener Frequenzen nicht so unmittelbar sichtbar machen lassen wie im Frequenzbereich.
Die Transformation in den Frequenzbereich liefert scheinbar komplexe Signale. Dies ist aber nur ein formales Problem. Hingegen ist das Arbeiten im Komplexen wesentlich einfacher. Aber tatsächlich bleiben reelle
Signale insgesamt auch im Komplexen reell, da die Summe zweier konjugiert komplexer Teilschwingungen
immer reell ist.
Aber auch die einzelnen zeitlichen und spektralen Signale sind nur bedingt aussagekräftig. Wichtig sind die
anschließenden theoretischen und experimentellen Identifikationsvorgänge, die auf Grund angenommener
(hypothetischer) Modelle die wichtigen Parameter des Eigenverhaltens (Eigenwerte, Moden), der Dämpfungen, Pollagen, Resonanzüberhöhungen, Kopplungen usw. liefern. Dieser Arbeitsbereich heißt Modalanalyse
(modal analysis). Dazu werden die schwingungsfähigen Prozesse häufig absichtlich mechanisch angeregt,
um gezielt Schwingungsvorgänge auszulösen (Zusatz → Modul "Anregung schwingungsfähiger mechanischer Prozesse"). Erst aus solchen Ergebnissen können Maßnahmen zur systematischen Verbesserung des
Verhaltens schwingungsfähiger Prozesse abgeleitet werden.
(Zusatz → Terminologieliste "Mechanische Schwingungen")
(Zusatz → Literaturliste "Mechanische Schwingungen")
Zitieren
Beziehen Sie sich auf dieses Dokument durch folgenden Zitiermodus:
Ruhm, K. H.; Schwingungen als Signale
Internet-Portal "Wissenschaft und Technik des Messens"; http://www.mmm.ethz.ch/dok01/d0000215.pdf
Andere Varianten
Es existiert eine englische Version dieses Dokuments: d0000XXX
Änderungen
Rev. Datum
Änderung
00
11.12.2003
Erstausgabe
02
16.02.2010
Kleinere Ergänzungen