Grundkurs Optik 1 Geometrische und Technische Optik
Werbung

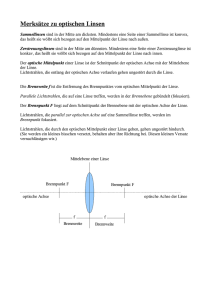
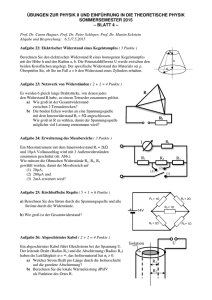
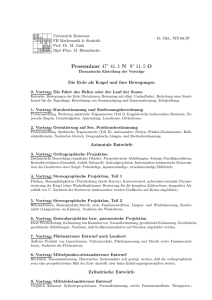
Grundkurs Optik 1 Geometrische und Technische Optik Eine Zusammenfassung Balthasar Reuter WS 2009/2010 - N. Lindlein Inhaltsverzeichnis 1 Grundlagen der Geometrischen Optik 1.1 Eikonal-Gleichung . . . . . . . . . . . 1.1.1 Strahlen-Differentialgleichung . 1.1.2 Grenzen der Eikonal-Gleichung 1.2 Energieerhaltung . . . . . . . . . . . . 1.3 Paraxiale Optik . . . . . . . . . . . . . 1.3.1 Meridional- und Sagittalebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 3 3 3 3 3 2 Paraxiale Matrizenoptik 2.1 Allgemeine Abbildung . . . . . . . . . . . . . . 2.2 Berechnung der Kardinalpunkte . . . . . . . . . 2.2.1 Hauptebene . . . . . . . . . . . . . . . . 2.2.2 Knotenpunkte . . . . . . . . . . . . . . 2.2.3 Brennpunkte . . . . . . . . . . . . . . . 2.2.4 Brennweite . . . . . . . . . . . . . . . . 2.3 Wichtige Matrizen . . . . . . . . . . . . . . . . 2.3.1 Freiraumausbreitung . . . . . . . . . . . 2.3.2 Brechung an planer Fläche . . . . . . . 2.3.3 Brechung an sphärischer Fläche . . . . . 2.3.4 Reflexion an planer Fläche . . . . . . . 2.3.5 Reflexion an sphärischer Fläche . . . . . 2.3.6 Dünne Linse (d → 0) . . . . . . . . . . . 2.3.7 Dicke Linse . . . . . . . . . . . . . . . . 2.4 Sonderfall: n = n′ . . . . . . . . . . . . . . . . . 2.5 Erweiterung auf 3x3-Matrizen . . . . . . . . . . 2.5.1 Beugung an Gitter . . . . . . . . . . . . 2.5.2 Brechung an gekippter Fläche . . . . . . 2.5.3 Transformation des Koordinatensystems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 4 4 4 4 5 5 5 5 5 5 5 5 5 5 6 6 6 6 3 Abbildungsgleichungen 3.1 Linsengleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Newtongleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 6 7 4 Blenden 4.1 Aperturblende . . . . . . . . . 4.1.1 Eintrittspupille . . . . . 4.1.2 Austrittspupille . . . . . 4.1.3 Lage der Aperturblende 7 7 7 7 7 . . . . . . . . . . . . . . . . . . . . . . . . . . 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 INHALTSVERZEICHNIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7 7 8 8 8 8 5 Raytracing 5.1 Vorausetzungen . . . . . . . . . . . . . . . . . . . . . . . . 5.2 Vorgehen beim Raytracing eines Strahls . . . . . . . . . . 5.2.1 Mathematische Beschreibung eines Strahls . . . . . 5.2.2 Bestimmung des Schnittpunktes . . . . . . . . . . 5.2.3 Brechungs-/Reflexionsgesetzt in vektorieller Form . 5.3 Optische Pfadlänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 8 8 9 9 9 9 6 Aberrationen 6.1 Berechnung der Wellenaberration . . . 6.2 Berechnung der Strahlaberration . . . 6.2.1 Graphische Veranschaulichung 6.3 Aberrationsarten . . . . . . . . . . . . 6.4 Zernike-Polynome . . . . . . . . . . . . 6.5 Chromatische Aberrationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 10 10 10 10 12 13 7 Optische Elemente 7.1 Diffraktive (beugende) Elemente . . . . . . . . . . . . . . . . . . . . . 7.1.1 Diffraktive Linse . . . . . . . . . . . . . . . . . . . . . . . . . . 7.1.2 Phasenfunktion eines diffraktiven optischen Elementes (DOE): 7.2 Aplanatischer Meniskus . . . . . . . . . . . . . . . . . . . . . . . . . . 7.3 Achromat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.4 Spektrograph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.4.1 Prismen-Spektrograph . . . . . . . . . . . . . . . . . . . . . . . 7.4.2 Gitter-Spektrograph . . . . . . . . . . . . . . . . . . . . . . . . 7.5 Kamera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.5.1 Film vs. CCD/CMOS . . . . . . . . . . . . . . . . . . . . . . . 7.5.2 Farb-CCD-Kameras . . . . . . . . . . . . . . . . . . . . . . . . 7.6 Menschliches Auge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.6.1 Farbsehen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.7 Teleskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.7.1 Galilei-Teleskop . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.7.2 Kepler-/Astronomisches Teleskop . . . . . . . . . . . . . . . . . 7.7.3 4F-System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.7.4 Auflösungsvermögen . . . . . . . . . . . . . . . . . . . . . . . . 7.8 Mikroskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.8.1 Lupe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.8.2 Mikroskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7.9 Vergleich Teleskop - Mikroskop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 13 14 14 15 15 16 16 16 16 17 17 17 18 18 18 18 19 19 20 20 20 20 8 Radiometrie und Photometrie 8.1 Radiometrische und Photometrische Größen . 8.2 Abbildung kleiner (punktartiger) Lichtquellen 8.3 Ausgedehnte Lichtquellen . . . . . . . . . . . 8.3.1 Verallgemeinerte Strahlungsformeln . 8.3.2 Anwendungen . . . . . . . . . . . . . . 8.3.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 21 22 22 23 23 24 4.2 4.3 4.4 4.5 4.1.4 Aperturwinkel . Hauptstrahl . . . . . . . Numerische Apertur N A Bildfeldblende . . . . . . 4.4.1 Eintrittsluke . . 4.4.2 Austrittsluke . . Vignettierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 GRUNDLAGEN DER GEOMETRISCHEN OPTIK 1 3 Grundlagen der Geometrischen Optik Aus den Maxwellgleichungen für die Wellenoptik lässt sich die Eikonal-Gleichung ableiten. 1.1 Eikonal-Gleichung (∇L(r))2 = n2 (r) Dabei stellt L die optische Weglänge dar, die oftmals auch als Eikonal bezeichnet wird, d.h. den kürzesten Weg zwischen zwei durch optische Medien getrennten Punkten. n ist die Brechzahl des Mediums. Ein Strahl zeigt dabei in die Richtung von ∇L und die Eikonal-Gleichung ist somit Grundlage der geometrischen Optik. 1.1.1 Strahlen-Differentialgleichung Aus der Eikonal-Gleichung folgt, dass Strahlen immer senkrecht auf Flächen mit konstanter optischer Weglänge stehen. Grund dafür ist, dass die Wellenvektoren h, e sowie die Weglänge ∇L senkrecht aufeinander stehen. Aus der Eikonal-Gleichung lässt sich die Strahlen-DGL ableiten: dr d (n · ) = ∇n ds ds Ist die Brechzahl n abhängig vom Ort, so spricht man von GRIN-Materialien (graded index). Meist gilt aber n = const.. Dann gilt d2 r =0 ds2 und die Lösung für r lautet dann r =s·a+p 1.1.2 Grenzen der Eikonal-Gleichung Die Eikonal-Gleichung trifft nicht mehr zu, wenn sich die Amplitude der Welle schnell ändert (z.B. in der Nähe des Brennpunktes). Im Allgemeinen jedoch ist sie hinreichend genau für RaytracingBerechnungen, da dort die Brennweite üblicherweise ein Vielfaches der beugungsbegrenzten Fokusgröße beträgt. 1.2 Energieerhaltung Die Energie wird entlang der Lichtstrahlen transportiert. Somit bleibt die Gesamtenergie konstant, wenn nirgends Licht absorbiert wird. Der Leistungsfluss lässt sich dabei durch den PoyntingVektor ausdrücken. 1.3 Paraxiale Optik Paraxial bedeutet, die Strahlhöhen x sind klein verglichen mit anderen Parametern wie Durchmesser der Linsen oder Brennweiten. Außerdem sind die Strahlwinkel ϕ so klein, dass mit guter Näherung sin ϕ ≈ tan ϕ ≈ ϕ gilt. Die Paraxiale Optik vernachlässigt Aberrationen und gilt für achsenferne Strahlen nicht. Sie lässt sich durch die paraxiale Matrizenoptik beschreiben. 1.3.1 Meridional- und Sagittalebene Die Meridionalebene ist die Ebene, die den abzubildenden Objektpunkt sowie die optische Achse enthält. Die Sagittalebene steht senkrecht auf der Meridionalebene und enthält den Hauptstrahl. 4 2 PARAXIALE MATRIZENOPTIK 2 Paraxiale Matrizenoptik 2.1 Allgemeine Abbildung Abbildungsmatrix M’ Abbildungsmatrix M d Objektebene P d’ Optisches System Bildebene P’ . A B M hat die Form M = . C D ′ M besteht aus M und zwei Freiraumausbreitungen: ′ A + C · d′ A · d + B + C · d · d′ + D · d′ A ′ M = = C C ·d+D C′ B′ D′ Damit eine Abbildung erfolgt, gilt: B ′ = 0. Damit gilt für M ′ : β 0 M′ = − f1′ D′ 2.2 Berechnung der Kardinalpunkte Zum Berechnen der Kardinalpunkte wählt man die Objekt- und Bildebenen gleich den gesuchten Ebenen. Die Abstände bezeichnen jeweils die Entfernung vom Scheitel der ersten Linse auf Objektseite bzw. von der letzten Linse auf Bildseite. Der Abstand d ist dabei positiv, wenn der Punkt links von der ersten Linse liegt, der Abstand d′ ist positiv, wenn der Punkt rechts von der letzten Linse liegt. 2.2.1 Hauptebene Bildet Objekt auf Bild mit identischer Größe (x = x′ ) und Vergrößerungsfaktor β = +1 ab. ⇒ dU = (A − 1) · 2.2.2 D −B C d′U ′ = 1−A C Knotenpunkte Strahlen durch Knotenpunkte besitzen Winkelvergrößerung γ = 1, d.h. x = x′ = 0 und ϕ = ϕ′ . ⇒ dN = 2.2.3 1−D C dN ′ = (D − 1) · A −B C Brennpunkte Strahlen ausgehend von Brennpunkt F werden zu Parallelstrahlen gebrochen, Parallelstrahlen werden gebrochen und durchlaufen F ′ , d.h. wähle x = x′ = 0 und ϕ = 0 für ϕ′ 6= 0 bzw. umgekehrt. ⇒ dF = − D C d′F ′ = − A C 5 2 PARAXIALE MATRIZENOPTIK 2.2.4 Brennweite Gibt Abstand zwischen Brennpunkt und Hauptebene an. f ist negativ, wenn F links von der Hauptebene U liegt, f ′ ist positiv, wenn F rechts von der Hauptebene U ′ liegt. ⇒f = 2.3 2.3.1 2.3.2 2.3.3 det(M ) C f′ = − 1 C f′ n′ =− f n und Wichtige Matrizen Freiraumausbreitung 1 0 d 1 1 0 0 Brechung an planer Fläche Brechung an sphärischer Fläche n n′ 1 0 ′ n − nn′−n ·R n′ R ist positiv, wenn der Mittelpunkt der Krümmung rechts vom Scheitel liegt. 2.3.4 Reflexion an planer Fläche Bei Reflexion wird nicht der reflektierte Strahl betrachtet, da sonst das Licht von rechts nach links läuft, sondern die Spiegelung des reflektierten Strahls an der Reflexionsebene. 1 0 0 1 2.3.5 2.3.6 Reflexion an sphärischer Fläche 1 2 R 0 1 Dünne Linse (d → 0) 1 L − nn′−n ·R2 − ′ 0 nL −n n′ ·R1 n n′ Haupt- und Knotenpunkte fallen hierbei zusammen und liegen in der Linsenebene. 2.3.7 Dicke Linse ′ L − nn′−n ·R2 − 2.4 −n 1 − d nnLL·R 1 nL −n n′ ·R1 + (nL −n)(n′ −nL ) nL ·n′ ·R1 ·R2 d nnL n n′ ′ −nL ) − d n(n nL ·n′ ·R2 ! Sonderfall: n = n′ Befindet sich um Linse/optisches System ein konstantes Medium, d.h. sind Brechungsindex davor und dahinter identisch, so • fallen die Haupt- und Knotenpunkte zusammen (dN = dU und d′N ′ = d′U ′ ) • gilt f ′ = −f Die Matrix der dünnen Linse vereinfacht sich zu 1 − f1′ 0 . 1 6 3 ABBILDUNGSGLEICHUNGEN 2.5 Erweiterung auf 3x3-Matrizen Die Beschränkung auf 2x2-Matrizen erlaubt keine Brechung an gekippten oder lateral verschobenen Instrumenten bzw. die Beugung an Gittern. Aus diesem Grunde ist es möglich, die Matrizenoptik auf 3x3-Matrizen der Form A B ∆x M3×3 = C D ∆ϕ 0 0 1 zu erweitern. 2.5.1 Beugung an Gitter 1 MG = 0 0 0 0 λ 1 m· Λ 0 1 mit m als Ordnung der Beugung und Λ als Gitterkonstante. 2.5.2 Brechung an gekippter Fläche MR,α 1 = 0 0 mit α als Winkel zwischen Ebene und Lot. 2.5.3 0 n n′ 0 0 n′ −n n′ α 1 Transformation des Koordinatensystems Meist ist es am einfachsten, eine Transformation in ein gekipptes, verschobenes Koordinatensystem vorzunehmen. Die Transformationsmatrix mit ∆x als Verschiebung und ∆ϕ als Drehwinkel lautet 1 0 −∆x MG→L = 0 1 −∆ϕ 0 0 1 Die Rücktransformation lautet ML→G 1 = 0 0 0 ∆x −1 1 ∆ϕ = MG→L 0 1 Dabei muss ebenfalls die Reihenfolge ”von hinten nach vorne”beachtet werden, z.B.: M = ML→G · MS · MG→L 3 3.1 Abbildungsgleichungen Linsengleichung Objektweite dO ist Abstand vom Objekt zur Hauptebene U , Bildweite dI ist Abstand von der Hauptebene U ′ zum Bild. n n′ n n′ − = ′ =− dI dO f f für n = n′ : 1 1 1 − = ′ dI dO f 7 4 BLENDEN 3.2 Newtongleichung Gibt Gegenstands- und Bildweite relativ zu den Brennpunkten an: Z · Z′ = f · f ′ wobei dO = Z + f und dI = Z ′ + f ′ . ′ Der Abbildungsmaßstab ergibt sich zu β = − Zf = − Zf ′ . ′ ′ ff Der Tiefenmaßstab ergibt sich zu dZ dZ = − Z 2 . Das Verhältnis von Abbildungs- und Tiefenmaßstab ergibt sich zu 4 4.1 dZ ′ dZ = n′ 2 nβ Blenden Aperturblende Für jede Blende (Linsendurchmesser, reale Blenden) eines optischen Systems lässt sich der Öffnungswinkel bestimmen: di tan ϕi = mit di : Durchmesser, li : Abstand vom Objektpunkt 2li Die Blende mit dem kleinsten Öffnungswinkel ϕO ist die Aperturblende. 4.1.1 Eintrittspupille Das Bild der Aperturblende an dem optischen Element, das der Aperturblende voraus geht. 4.1.2 Austrittspupille Das Bild der Aperturblende an dem optischen Element, das der Aperturblende nachfolgt. 4.1.3 Lage der Aperturblende Meist innerhalb des Systems, d.h. Eintritts- und Austrittspupille liegen entsprechend und können reale oder virtuelle Bilder sein. Liegt sie vor dem System, fallen Eintrittspupille und Aperturblende zusammen. Liegt sie hinter dem System, fallen Austrittspupille und Aperturblende zusammen. 4.1.4 Aperturwinkel Objektseitig: 2 · ϕO Bildseitig: 2 · ϕI , wobei dI (lI ist Abstand des Bildes von der Austrittspupille, dI ihr Durchmesser) tan ϕI = 2l I 4.2 Hauptstrahl Strahl vom Objektpunkt, der durch die Mitte der Aperturblende läuft (und damit auch durch die Mitten von Eintritts- und Austrittspupille). 4.3 Numerische Apertur NA Objektseitig: N AO = nO · sin ϕO Bildseitig: N AI = nI · sin ϕI N AO β Die Numerische Apertur gibt an, wieviel Licht das optische System vom Objekt sammeln kann. Treten keine Aberrationen auf, ist sie außerdem ein Maß für das Auflösungsvermögen des Systems bzgl. Beugungserscheinungen. Zusammenhang: N AI = 8 5 RAYTRACING 4.4 Bildfeldblende Die Bildfeldblende gibt Auskunft über die maximale Größe eines Objektes, das mit dem optischen System abgebildet werden kann. Dazu werden erneut alle Öffnungswinkel berechnet, diesmal aber inklusive Blenden in der Objektund Bildebene (z.B. Größe eines CCD-Chips). Der Kleinste Wert ϕO liefert die Bildfeldblende: tan ϕi = di 2Li Der Bildfeldwinkel ist 2 · ϕO . 4.4.1 Eintrittsluke Das Bild der Bildfeldblende an dem optischen Element, das der Bildfeldblende voraus geht. 4.4.2 Austrittsluke Das Bild der Bildfeldblende an dem optischen Element, das der Bildfeldblende nachfolgt. 4.5 Vignettierung Falls der Hauptstrahl vom Objektpunkt zur Eintrittspupille durch die Eintrittsluke blockiert ist, ist eine Abbildung meist nicht möglich, da die Strahlen dann die Bildfeldblende nicht passieren können. Ist dennoch eine Abbildung unter Verwendung anderer Strahlen möglich, so ist auf Bildseite keine klare Begrenzung des Objektfeldes mehr sichtbar und die äußeren Bereiche werden mit reduzierter Intensität abgebildet. Dieses Phänomen nennt man Vignettierung. 5 Raytracing Die Berechnung der Strahlen mit lediglich den Einschränkungen der Geometrischen Optik - also ohne weitere Annäherungen wie Paraxialstrahlen - erlaubt eine genaue Betrachtung von optischen Systemen. 5.1 Vorausetzungen Für Raytracing müssen genaue Kenntnisse über das optische System vorhanden sein, ins Besondere über • Art der Oberfläche (sphärisch, planar, parabolisch, ...) • Charakteristische Daten zur Oberfläche (Radius o.ä.) • Form und Größe der Grenzen der Fläche • Position und Ausrichtung in allen drei Raumdimension • Brechzahl in Abhängigkeit von der Oberfläche 5.2 Vorgehen beim Raytracing eines Strahls 1. Bestimme Schnittpunkt von Strahl und optischer Fläche 2. Berechne Flächennormale in dem Schnittpunkt 3. Wende Brechungs- oder Reflexionsgesetz an 4. Wiederhole von Anfang mit der nächsten Oberfläche (falls vorhanden) 9 6 ABERRATIONEN 5.2.1 Mathematische Beschreibung eines Strahls Vektorielle Darstellung notwendig: r= p+s·a mit |a| = 1, p Ausgangspunkt des Strahls Dabei repräsentiert s > 0 den realen Teil, s < 0 den virtuellen Teil eines Strahls. 5.2.2 Bestimmung des Schnittpunktes Flächen/Ebenen lassen sich durch eine Funktion F (r) = 0 beschreiben. Der Schnittpunkt ergibt sich dann aus der Gleichung F (p + s0 · a) = 0 durch das Einsetzen des ermittelten s0 in die Strahlgleichung. Das Finden der Lösung erfolgt i. A. numerisch. 5.2.3 Brechungs-/Reflexionsgesetzt in vektorieller Form N × (n2 · a1 − n1 · a1 ) = 0 a1 ist der einfallende Strahl, a2 der reflektierte bzw. gebrochene Strahl. Auflösen nach a2 ergibt den resultierenden Strahl. 5.3 Optische Pfadlänge Mit einer bekannten Pfadlänge L0 am Ausgangspunkt p eines Strahls kann die optische Pfadlänge an jeder beliebigen Stelle des Strahls bestimmt werden: L = L0 + n · s 6 Aberrationen Bei optischen Systemen können Abbildungsfehler auftreten, so genannte Aberrationen. Betrachtet man eine Wellenfront in der Austrittspupille mit identischer optischer Weglänge, so hat diese in der paraxialen Näherung eine Kugelform mit Mittelpunkt im Brennpunkt des Systems. Damit treffen alle Strahlen (Flächennormalen der Kugel) im Brennpunkt zusammen. 10 6 ABERRATIONEN In der Realität besitzt die Wellenfront keine Kugelform. Dadurch schneiden sich die Strahlen - ins Besondere in größerer Entfernung von der optischen Achse - nicht mehr im Brennpunkt, sondern davor oder dahinter. Diese Verschiebung bezeichnet man als Strahlaberration. Zusätzlich besitzt ein beliebiger Strahl in der Austrittspupille mit Koordinaten (x′ , y ′ ) nun eine andere optische Weglänge als im paraxialen Fall. Diese Differenz bezeichnet man als Wellenaberration W (x′ , y ′ ). 6.1 Berechnung der Wellenaberration Mittels Raytracing lässt sich die Wellenaberration bestimmen. Zu diesem Zweck legt man eine sphärische Fläche in die Austrittspupille mit dem (paraxialen) Brennpunkt als Mittelpunkt. Nun berechnet man für einen beliebigen Strahl auf dieser Fläche die optische Weglänge L(x′ , y ′ ). Die Differenz gegenüber der optischen Weglänge des Hauptstrahls L(0, 0) liefert die Wellenaberration: W (x′ , y ′ ) = L(x′ , y ′ ) − L(0, 0) Häufig wird statt des paraxialen Brennpunktes der ”beste Fokusäls Mittelpunkt der Fläche gewählt. Dabei handelt es sich um den Punkt, an dem Wellen- oder Strahlaberrationen minimal sind. 6.2 Berechnung der Strahlaberration Ebenfalls mittels Raytracing lässt sich die Strahlaberration bestimmen. Dazu bestimmt man den Schnittpunkt ri eines beliebigen Strahls mit der Brennebene. Aus der Ortsdifferenz zwischen Schnitt- und Brennpunkt P ergibt sich die Strahlaberration: ∆x = (ri − P) · nx ∆y = (ri − P) · ny 6.2.1 Graphische Veranschaulichung Ein Spotdiagramm erlaubt es, die Strahlaberrationen graphisch zu veranschaulichen. Dazu zeichnet man auf der x-y-Ebene durch den Brennpunkt jeden Strahl als Punkt ein. Damit sind Abweichungen vom Brennpunkt unmittelbar zu erkennen. 6.3 Aberrationsarten Bei den folgenden Aberrrationen handelt es sich, im Gegensatz zu chromatischen Aberrationen (Farbfehler), um monochromatische Bildfehler. Man unterscheidet in erster Linie Punktbildaberrationen, die bewirken, dass das Bild unscharf oder unsauber wird, und Feldaberrationen, die auch scharfe Abbildungen zulassen, aber das Bild verzerren. Punktbildaberrationen Sphärische Aberrationen Koma Astigmatismus Feldaberrationen Bildfeldkrümmung Verzeichnung Sphärische Aberrationen Sphärische Aberrationen (auch bezeichnet als Öffnungsfehler ) treten als einzige auch für Objektpunkte auf der optischen Achse auf. Sie entstehen dadurch, dass in einer Linse in größerer Entfernung von der optischen Achse Strahlen stärker gebrochen werden, als in unmittelbarer Nähe. Dadurch schneiden diese Strahlen die optische Achse bereits vor dem Brennpunkt und erzeugen ein weiches, verschwommenes Bild. Dabei gilt mit N A als Numerische Apertur: sphärische Aberration ∝ N A4 11 6 ABERRATIONEN Koma Die Koma tritt nur für Punkte auf, die nicht auf der optischen Achse liegen. Sie ist benannt nach der Deformation des Bildpunktes, die wie die Koma eines Kometen aussieht. Mit rO als Höhe des Objektpunktes über der optischen Achse gilt: Koma ∝ rO · N A3 Sie tritt vor allem bei großer Numerischer Apertur auf, bei kleinen Werten dominiert der Astigmatismus. Z.B. durch Verschieben einer Linse nach oben oder unten kann sie erzeugt werden. Astigmatismus Astigmatismus tritt auf, wenn die Strahlen der Meridional- und Sagittalebene in unterschiedlichen Ebenen fokussieren. Damit existieren • zwei Ebenen, in denen der Objektpunkt auf eine Linie abgebildet wird. • eine Ebene dazwischen, in der der Objektpunkt auf einen unscharfen Kreis abgebildet wird. • unendlich viele Ebenen, in denen eine Abbildung auf eine Ellipse mit Ausrichtung entsprechend der Linie erfolgt. Er tritt im Allgemeinen nur für Punkte außerhalb der optischen Achse auf und es gilt: 2 Astigmatismus ∝ rO · N A2 6 ABERRATIONEN 12 Bildfeldkrümmung Die Bildfeldkrümmung oder Bildfeldwölbung erlaubt eine scharfe Abbildung, die jedoch gegenüber dem idealen, paraxialen Bildpunkt verschoben ist. Dies bedeutet, dass die Abbildung durch das System nicht auf eine plane Bildebene sondern eine gekrümmte Bildebene erfolgt. Verzeichnung Verzeichnung entsteht, wenn der Abbildungsmaßstab eines Systems ins Besondere für achsferne Punkte nicht konstant ist. Dadurch werden gerade Linien im Bild zwar scharf, aber gekrümmt dargestellt. 6.4 Zernike-Polynome Sie erlauben eine Berechnung der Punktaberrationen, da verschiedene Ordnungen der Polynome dem Wert der Aberration entsprechen. Voraussetzung dafür ist, dass die Apertur des Systems kreisformig ist, da die Polynome orthogonal auf dem Einheitskreis sind. • 0. Grad: Konstante 7 OPTISCHE ELEMENTE 13 • 1. Grad: Tilt x/y • 2. Grad: Astigmatismus 0 ◦ /45 ◦ , Defokus • 3. Grad: Trifoli 0 ◦ /30 ◦ , Coma x/y • 4. Grad: Tetrafoli 0 ◦ /22, 5 ◦, Astigmatismus 2. Ordnung 0 ◦ /45 ◦, sphärische Aberration 6.5 Chromatische Aberrationen Chromatische Aberrationen oder Farbfehler entstehen dadurch, dass die Brechzahl eines Mediums von der Wellenlänge des Lichtes abhängig ist und somit unterschiedliche Farbanteile durch ein optisches System unterschiedlich abgebildet werden. Auskunft über die Stärke der Dispersion gibt die Abbe-Zahl, die bei geringer Dispersion große Werte annimmt. Ihr Vorzeichen zeigt an, wie eine Veränderung der Wellenlänge die Brennweite des Systems beeinflusst: Positiv bedeutet eine Vergrößerung der Brennweite bei wachsender Wellenlänge. 7 7.1 Optische Elemente Diffraktive (beugende) Elemente λ a) Amplitudengitter erzeugt positive Interferenz falls gilt: sinϕ′ = sinϕ + m Λ Maximale Beugungseffizienz von 10.1% in 1. Ordnung λ b) Binäres Phasengitter ∆h = 2(n−1) Maximale Beugungseffizienz von 40.5% in 1. Ordnung (N −1)λ c) Mehrstufiges Phasengitter ∆h = N (n−1) Symmetrisch zwischen +1. und -1. Ordnung gebrochen. Je nach Stufenzahl Beugungseffizienz von 40.5% bis 100% in 1.Ordnung 14 7 OPTISCHE ELEMENTE λ d) Geblaztes Phasengitter ∆h = n−1 Theoretisch Beugungseffizienz bis zu 100% in 1.Ordnung Binäres Phasengitter Beim binären Phasengitter interferieren für ungerade m doppelt soviele Strahlen, das bedeutet dass auch die Amplitude verdoppelt wird und die Intensität wird verglichen mit einem Amplitudengitter - um Faktor 4 vergrößert. Maximale Beugungseffizienz in 1. Ordnung ergibt sich mit einem mehrstufigen Phasengitter mit N Stufen. Die ideale Gesamttiefe lautet d= (N − 1)λ N (n − 1) Dabei gilt: • Identische Höhe und Breite aller Stufen • Senkrechter Lichteinfall • Fresnel Reflexionsverluste vernachlässigt 7.1.1 Diffraktive Linse Eine diffraktive Linse (z.B. Fresnel-Zonen-Linse) besitzt eine konstante Abbe Zahl Vd = −3, 452, unabhängig vom verwendeten Material. Der kleine, negative Wert bedeutet, dass sie eine hohe Dispersion besitzt. Damit gilt für ihre Brennweite bei einer Wellenlänge λ: f ′ (λ) = 7.1.2 λ0 ′ f (λ0 ) λ Phasenfunktion eines diffraktiven optischen Elementes (DOE): Die Phasenfunktion Φ eines DOEs beschreibt, an welchen Stellen sich die lokalen Gitterlinien befinden, d.h. an welchen Stellen die Phase relativ um jeweils 2 π zu- oder abnimmt. Zwischen der Phasenfunktion Φ und der lokalen Gitterfrequenz ν lässt sich ein Zusammenhang beschreiben: 1 1 = |∇Φ(x, y)| ν(x, y) = Λ(x, y) 2π Lineares Phasengitter Hier lautet die Phasenfunktion: Φ(x, y) = 2π(ax + by) √ Die Gitterfrequenz ist konstant: ν = a2 + b2 Fresnel-Zone-Linse In paraxialer Näherung lautet ihre Phasenfunktion Φ(x, y) = 2π(x2 + y 2 ) p Die Gitterfrequenz wird beschrieben durch: ν(x, y) = 2a x2 + y 2 15 7 OPTISCHE ELEMENTE 7.2 Aplanatischer Meniskus Eine Kugel mit Radius R erlaubt die Abbildung eines Bildpunktes P auf einer konzentrischen ′ Kugel mit Radius nn R auf einen Bildpunkt P’ in einer inneren, konzentrischen Kugel mit Radius n n′ R. Dabei treten keinerlei sphärische Aberrationen auf! “Schneidet“ man nun die Kugel auf und verwendet als Rückwand eine sphärische Fläche, die ihren Krümmungsmittelpunkt in P’ besitzt, so erfährt der Strahl an dieser Rückwand keine Brechung und die Abbildung auf P’ erfolgt ohne sphärische Aberrationen. Damit vergrößert sich der bildseitige Aperturwinkel und somit die Numerische Apertur. Für Bildpunkte außerhalb der optischen Achse können wieder geringe sphärische Aberrationen auftreten. 7.3 Achromat Eine achromatische Linse besitzt für zwei Wellenlängen die identische Brennweite. Dazu werden zwei Linsen benötigt. Analog existiert ein Apochromat, der für drei Wellenlängen die identische Brennweite besitzt und aus drei Linsen besteht. Zur Berechnung kann eine Annäherung durch zwei dünne Linsen mit einem Abstand von 0 erfolgen: 1 0 1 0 1 0 M = M2 M1 = − 1 1 − 1 1 = −( 1 + 1 ) 1 f2′ f1′ f1′ f2′ 1 1 1 = ′ + ′ f′ f1 f2 Darüber hinaus existiert eine zweite Brennweite für eine dritte Wellenlänge, die zwischen den beiden Wellenlängen mit identischer Brennweite liegt - die “Normalbrennweite“. Die Produkte aus Abbe-Zahlen und Brennweiten der beiden Linsen müssen gegensätzliche Vorzeichen haben. Das bedeutet, ein Achromat besteht entweder aus zwei verkitteten Linsen unterschiedlicher Art (refraktiver Achromat, positive Abbe-Zahlen und Brennweiten mit unterschiedlichem Vorzeichen) oder aus einer reflektierenden und beugenden Linse (hybrider Achromat). ⇒ 7 OPTISCHE ELEMENTE 16 a) refraktiver Achromat: nur zwei der Krümmungsradien sind durch die Achromasie festgelegt, der dritte Radius kann z.B. zum Erfüllen der Sinus-Bedingung gewählt werden. b) hybrider Achromat: Sinus-Bedingung ist nicht leicht erfüllbar, dafür ist eine Reduktion der sphärischen Aberrationen möglich. 7.4 Spektrograph Ein Spektrograph zerlegt einfallendes Licht in seine Wellenlängen-Anteile. Er besteht immer aus einer Linse zum Kollimieren des von der Lichtquelle stammenden Lichts, einem dispersiven Element sowie einer Linse zum Abbilden der Zerlegung auf einen Detektor. Prismen-Spektrograph Hier wird ein Prisma als dispersives Element verwendet. Die Auflösung ist jedoch durch Beugung stark begrenzt. Gitter-Spektrograph Hier wird ein Gitter als dispersives Element verwendet. Die Auflösung liegt dabei wesentlich höher (ca. 10×) als bei Verwendung eines Prismas. Um eine noch höhere Auflösung zu erreichen ist die Verwendung von Geräten nötig, die wellenoptische Effekte ausnutzen. Diese fächern meist einen Teil des von einem Gitter- oder Prismenspektrograph zerlegten Lichts noch weiter auf. 7.5 Kamera Eine Kamera besteht immer aus einer Linse bzw. einem Linsensystem und einer Blende (die z.B. die Fassung der Linse sein kann), die ein Objekt invertiert auf eine Lichtempfindliche Oberfläche (Film, CCD-Chip, ...) abbilden. Dabei gilt meist: • Brennweite ≪ Objektweite, d.h. dI ≈ f ′ • Detektorfläche begrenzt die Auflösung (p: Abstand der Bildpunkte/Pixel) Die Linse bildet Punktförmige Objekte auf der idealen Objektebene als Punkte auf die ideale Bildebene ab, Objektebenen davor oder dahinter jedoch unscharf, d.h. als dünne Scheiben, auf die ideale Bildebene. Ist der Durchmesser dieser Scheiben jedoch kleiner als p, so erfolgt die Aufnahme trotzdem ohne Auflösungsverlust. Damit existieren neben der idealen Objektebene eine Nahe und Ferne Objektebene, die gerade noch scharf aufgenommen werden können. 17 7 OPTISCHE ELEMENTE Als Schärfentiefe wird der Abstand der beiden Grenzebenen bezeichnet: dO,F − dO,N . ′ Die Blendenzahl f # = fD (mit D: Blendendurchmesser) bestimmt die Belichtungszeit, da für die Lichtenergie gilt: E = a · t · D2 = a · t · ( f′ 2 ) f# mit a = const., t: Belichtungszeit Außerdem existiert eine kritische Objektweite dO,C : Beim Scharfstellen auf diese oder weiter entfernte Objektebenen, werden alle Objektpunkte dahinter scharf abgebildet, d.h. dO,F → ∞. 7.5.1 Film vs. CCD/CMOS Ein Film besitzt tendenziell ein viel größeres Auflösungsvermögen (bis zu 74 MPixel) als ein digitaler Sensor (max. ca. 20 MPixel), jedoch eine wesentlich geringere Lichtausbeute (5 bis 10% ggü. bis zu 90%). 7.5.2 Farb-CCD-Kameras Digitale Farbkameras besitzen in der Regel einen Farbfilter vor dem Chip und dahinter Pixel, die jeweils für einen bestimmten Farbbereich sensitiv sind. 7.6 Menschliches Auge Das menschliche Auge arbeitet prinzipiell wie eine Kamera: Es besitzt ebenfalls eine Linse, die Hornhaut und Augenlinse, eine Blende, die Iris bzw. Regenbogenhaut, sowie einen Detektor, die Netzhaut. 18 7 OPTISCHE ELEMENTE Die Brechkraft = 1/Brennweite wird in Dioptrien angegeben, dpt = m−1 . Der Hauptanteil der Brechung erfolgt an der Hornhaut, ca. 43 dpt. Die Augenlinse besteht aus Schichten unterschiedlicher Brechkraft und ist durch Akkomodation (Muskel krümmt Linse) zu einer Brechkraft zwischen 19 und 34 dpt in der Lage. Die Winkelauflösung beträgt dabei bis zu ∆ϕ = 30”. Das Scharfsehen erfolgt jedoch nur in einem kleinen Bereich, deshalb erfolgt ständig ein unbewusstes “Abscannen“. 7.6.1 Farbsehen Das Farbsehen erfolgt durch unterschiedliche Rezeptoren auf der Netzhaut: • Stäbchen: sehr empfindlich, reagieren schon auf einzelne Photonen; erlauben jedoch nur Schwarz-Weiß-Sehen • Zapfen: drei Typen (S, M, L) für je einen Farbbereich; weniger Lichtempfindlich - fallen bei geringer Helligkeit aus Stäbchen sind in einem Ring um die Sehgrube auf der Netzhaut angeordnet, die Zapfen befinden sich in der Sehgrube, deshalb ist das Scharfsehen allein mit den Stäbchen (z.B. in der Nacht) kaum möglich. Eine Rot-Grün-Schwäche entsteht, wenn von den M- oder L-Zapfen nur ein Typus vorhanden ist. Dann ist keine Unterscheidung der Farbanteile möglich. 7.7 Teleskop Ein Teleskop ist ein System aus zwei Linsen (oder Spiegeln), von denen der bildseitige Brennpunkt der ersten Linse (Objektiv) sowie der objektseitige Brennpunkt der zweiten Linse (Okular) zusammenfallen. Damit gilt für den Abstand d = f1′ + f2′ . Die Abbildungsmatrix lautet: ! f′ − f2′ f1′ + f2′ 1 0 1 0 1 d 1 M= −1 1 f′ − f1′ 1 = 0 1 f2′ 0 − f1′ 1 2 Dabei ist C ′ = 0 = − f1′ , d.h. f ′ → ∞. Man unterscheidet zwei Typen von Teleskopen: Das Kepler-Teleskop, bestehend aus zwei Sammellinsen, sowie das Galilei-Teleskop, das aus einer Sammel- sowie einer Zerstreuungslinse besteht. ′ Ein Teleskop vergrößert Objekte durch eine Winkelvergrößerung γ = ϕϕ . Für |f1′ | > |f2′ | gilt |γ| > 1. 7.7.1 Galilei-Teleskop Liefert ein aufrechtes Bild, d.h. γ > 0, kann jedoch kein reelles Bild liefern. Es besitzt jedoch eine sehr kurze Baulänge, da d = f1′ + f2′ = |f1′ | − |f2′ |. Ein Nachteil ist jedoch, dass die Austrittspupille meist vor dem Okular liegt und damit das Auge nicht mit der Pupille in der Austrittspupille liegen kann. Dadurch ensteht ein “Schlüssellocheffekt“. Sinnvolle Anwendungen des Galilei-Teleskops sind z.B. Strahlaufweitung oder Operngläser. 7.7.2 Kepler-/Astronomisches Teleskop f′ Das Bild steht auf dem Kopf, da γ < 0. Für 0 ≤ d1 ≤ f1′ + f1′ f1′ liefert es ein reelles Bild. Bei mo2 dernen Teleskopen erfolgt meist eine Abbildung auf einen CCD-Sensor, nur selten die Betrachtung unmittelbar mit dem Auge. Da Linsen zum Betrachten weit entfernter Objekte sehr groß und damit auch sehr dick sein müssten, werden meist nur Spiegel-Teleskope verwendet. Einige Beispiele für Kepler-Teleskope: 19 7 OPTISCHE ELEMENTE Newton-Teleskop Besteht aus einem sphärischen oder Parabolspiegel sowie einem planen Spiegel, der das Licht nach oben in das Okular lenkt. Cassegrain-Teleskop Besteht aus einem konkaven Parabolspiegel als Primärspiegel sowie einem konvexen Hyperbolspiegel als Sekundärspiegel. Der optische Brennpunkt des Primärspiegels fällt dabei mit einem Kegelschnitt-Brennpunkt des Sekundärspiegels zusammen. Es zeichnet sich durch lange Brennweiten trotz kurzer Bauform aus. Schmidt-Cassegrain-Teleskop Hier wird der Primärspiegel durch einen sphärischen Spiegel ersetzt und am Eingang eine asphärische Phasenplatte eingefügt, die sphärische Aberrationen des Spiegels ausgleicht. Schmidt-Kamera Anstelle des Sekundärspiegels wird hier ein (CCD-)Detektor in den Krümmungsmittelpunkt des sphärischen Primärspiegels gesetzt. Dadurch tritt kaum Koma und Astigmatismus auf, dafür eine Bildfeldwölbung. Ritchey-Chrétien-Cassegrain-Teleskop Hier werden zwei hyperbolische Spiegel verwendet. Dadurch tritt keine Koma auf, dafür aber Bildfeldkrümmung. 7.7.3 4F-System Ein besonderer Fall ist das 4F-System. Bei diesem besitzen beide Linsen eine identische Brennweite und somit gilt dO +dI = const. = 2f ′ , d.h. β = −1. Das bedeutet, dass durch achsiale Verschiebung sich nichts an der Abbildung ändert. Eine typische Anwendung ist z.B. die reale Abbildung eines (virtuellen) (Zwischen)Bildes. 7.7.4 Auflösungsvermögen Das Auflösungsvermögen eines Teleskops ist beugungsbegrenzt. Dabei gilt für den Winkel ∆ϕ zwischen zwei weit entfernten, punktförmigen Objekten: ∆ϕ = k · λ D D stellt dabei den Durchmesser des Primärspiegels dar, k eine Konstante, die etwa k ≈ 1 ist. Bei erdgestützten Teleskopen ist das Auflösungsvermögen durch Luftturbulenzen noch stärker begrenzt: Durch Turbulenzen entstehen unterschiedliche Druckverhältnisse und damit unterschiedliche Brechzahlen. Damit unterscheiden sich die optischen Weglängen der einfallenden Strahlen. 20 8 RADIOMETRIE UND PHOTOMETRIE Damit wird die Auflösung auf etwa ∆ϕ = 1′ begrenzt. Zusätzlich ist eine Korrektur der optischen Weglängendifferenz nötig. Dies erfolgt durch eine Adaptive oder Aktive Optik. Diese verformt den Spiegel, um Aberrationen auszugleichen. Den Grad der Aberrationen misst sie dabei anhand eines fernen Leitsterns, der nahezu eine Punktlichtquelle darstellt. 7.8 7.8.1 Mikroskop Lupe Das (menschliche) Auge besitzt eine minimale Entfernung, auf die es entspannt scharf stellen kann: dS ≈ 25cm. Unter Verwendung einer Sammellinse direkt vor dem Auge, kann man ein vergrößertes Bild mit |dI | = dS erzeugen. Für die Vergrößerung gilt dabei β = 1 + dfS′ . Um eine starke Vergrößerung zu erreichen muss f ′ also sehr klein sein, das Objekt sehr nah an die Lupe heran. 7.8.2 Mikroskop Die Lösung ist das Mikroskop, das eine Lupe als Okular verwendet und damit ein von einem Mikroobjektiv mit Vergrößerung β1 < 0 erzeugtes Bild nochmals um β2 > 0 vergrößert. Für die Gesamtvergrößerung gilt damit β = β1 · β2 < 0 β1 besitzt dabei typischerweise einen Wert von 5 bis 100, β2 meist 5 bis 20. Das Mikroobjektiv muss achromatisch sein, eine hohe Numerische Apertur und ein aberrationsfreies Feld besitzen sowie die Sinus-Bedingung erfüllen. Das bedeutet es handelt sich dabei um ein komplexes System mit vielen Linsen. Ggf. muss es außerdem Aberrationen eines Deckglases korrigieren. Das Auflösungsvermögen des Mikroskops ist durch Beugung begrenzt, wird jedoch meist durch das Auflösungsvermögen des menschlichen Auges noch stärker eingeschränkt. Meist sind Gesamtvergrößerungen bis 500 oder 1000 sinnvoll. Ein Inspektions-Mikroskop arbeitet mit einem CCD-Chip als Detektor und benötigt deshalb ein reelles Bild, d.h. das Okular entfällt. Die Betrachtung erfolgt an einem Bildschirm. Ein UV-Mikroskop mit Wasser-Immersion erlaubt eine weitere Verbesserung der Auflösung. Dabei wird Licht mit geringerer Wellenlänge (UV-Bereich) verwendet und die Numerische Apertur durch eine Immersionsflüssigkeit zwischen Objekt und Objektiv vergrößert. 7.9 Vergleich Teleskop - Mikroskop Zweck Prinzip Auflösung 8 Teleskop vergrößerte Abbildung (unendlich) weit entfernter Objekte ′ Winkelvergrößerung γ = ϕϕ λ ∆ϕ = kT · D Mikroskop vergrößerte Abbildung naher, sehr kleiner Objekte Laterale Vergrößerung β = ∆x = km · NλA x′ x Radiometrie und Photometrie Physikalisch gesehen erfolgt keine Abbbildung von punktartigen Objekten, sondern der Transport von Strahlungsleistung (Photonen) vom Objekt zum Bild. Dies kann quantitativ durch strahlungsphysikalische (Radiometrie) bzw. lichttechnische Größen (Photometrie, Größen bezogen auf 21 8 RADIOMETRIE UND PHOTOMETRIE menschliches Auge) ausgedrückt werden. Die Größen sind dabei äquivalent und können einfach ausgetauscht werden - sie dürfen nur nicht gemischt verwendet werden! Eigenschaften realer Lichtquellen Einfluss des optischen Systems auf Strahlung • Größe und Form • Absorption • Richtungsabstrahlcharakteristik • spektrale Verteilung der Lichtleistung Φe,λ (λ) • Gesamte abgestrahlte Lichtleistung R Φe = Φe,λ (λ)dλ 8.1 • Reflexion • Transmission • Streulicht • Dispersion Radiometrische und Photometrische Größen Der Raumwinkel wird dabei in der Einheit Steradiant angegeben. Der Raumwinkel Ω einer Kugel beträgt beispielsweise 4πsr. Strahlungsphysikalische Größen Lichttechnische Größen Können mit Detektoren quantitativ gemessen werden, tragen den Index e. Berücksichtigen die subjektive Hellempfindlichkeit des menschlichen Auges auf verschiedene Wellenlängen. Strahlungsfluss bzw. -leistung: gesamte betrachtete Lichtleistung ([Φe ] = W = Watt) Lichtfluss bzw. -strom: gesamte betrachtete Lichtleistung ([Φ] = lm = Lumen) Φe Strahlstärke: Strahlungsfluss je Raumwinkel Ω: Ie = Watt ([Ie ] = W sr = Steradiant ) Bestrahlungsstärke: Strahlungsfluss je Flächenelement dF : Ee = dΦe dF dΦe dΩ bestrahltem W ([Ee ] = m 2) Strahldichte: Anteil an Strahlungsfluss, der vom Flächenelement dA der Lichtquelle in den Raumwinkel dΩ emittiert wird: 2 Φe e = cosdIϑdA ([Le ] = mW Le = cosdϑdAdΩ 2 sr ) cos ϑ erzeugt die Projektion des Flächenelements in die Emissionsrichtung. Lichtstärke: Lichtfluss je Raumwinkel Ω: I ([I] = cd = Candela = lm sr ) Beleuchtungsstärke: Strahlungsfluss je Flächenelement dF : E lm lx = Lux = m 2) = = Φ dΦ dΩ beleuchteten ([E] = dΦ dF Leuchtdichte: Anteil an Strahlungsfluss, der vom Flächenelement dA der Lichtquelle in den Raumwinkel dΩ emittiert wird: 2 Φ lm cd L = cos dϑdAdΩ = cosdI ϑdA ([L] = m2 sr = m2 ) Zusammenhang zwischen den Größen Φ=K· Z 780nm Φe,λ (λ)Vλ (λ)dλ 380nm e mit Φe,λ = δΦ δλ und Vλ (λ) als Funktion, die in Abhängigkeit von der Wellenlänge die Empfindlichkeit des Auges auf Licht beschreibt. 22 8 RADIOMETRIE UND PHOTOMETRIE Effizienz der Lichterzeugung Leistung beschreibt das Verhältnis des Lichtstroms zur aufgewendeten η= Φ Φe Typische Werte HeNe-Laser 100 W-Birne 8.2 Lichtstärke lediglich Φ = 0.18lm aber I ≈ 180000cd (sehr enger Strahl) Φ ≈ 1500lm I ≈ 125cd Straßenbeleuchtung Schreibtischlampe Kinoleinwand Beleuchtungsstärke 15lx 300lx 100lx Abbildung kleiner (punktartiger) Lichtquellen Die Beleuchtungsstärke auf einer Kugeloberfläche mit Radius a ergibt sich mit dem Raumwinkel dΩ = dF a2 zu: I E= 2 a Für die Lichtstärke bedeutet dies nach der Abbildung: I ′ = β2 · I Anwendung findet dies z.B. beim Projektor. Dort wird eine punktförmige Lichtquelle (die Lampe) mit einem Kondensor vergrößert in die Eintrittspupille des Objektivs abgebildet: 8.3 Ausgedehnte Lichtquellen Man unterscheidet verschiedene Strahlertypen nach Straubel anhand der Lichtstärke I in Abhängigkeit von der Beobachtungsrichtung ϑ: I(ϑ) = I0 · cosm ϑ 23 8 RADIOMETRIE UND PHOTOMETRIE Kugelstrahler m = 0, d.h. die Lichtstärke ist in alle Richtungen gleich groß. Lambert-Strahler m = 1, d.h. die Leuchtdichte L ist konstant: L= I0 = const. A Damit erscheint er aus allen Richtungen gleich hell, da die Leuchtdichte für den Helligkeitseindruck einer Fläche verantwortlich ist. Glühbirnen und LEDs können annhähernd als Lambert-Strahler betrachtet werden. Keulen-Strahler m = 3 Verhältnis der Lichstärken strom ΦHalbraum lautet: Das Verhältnis der Lichtstärken bei gleichem abgestrahlten LichtI0 m+1 = ΦHalbraum 2π Kugelstrahler 2πI0 ΦHalbraum = 1 Beleuchtungsstärke breitung Lambert-Strahler 2πI0 ΦHalbraum = 2 Keulenstrahler 2πI0 ΦHalbraum = 4 auf ebenem Schirm im Abstand a0 von der Lichtquelle bei FreiraumausE(ϑ) = E0 · cosm+3 ϑ mit E0 = I0 a20 Abbildung einer Lambert-Strahler-Fläche erfolgt genau dann, wenn das Abbildungssystem die Sinus-Bedingung erfüllt. Dann gilt für die Beleuchtungsstärke im Bild: E ′ = L · dΩ′ = 8.3.1 1 ·E β2 Verallgemeinerte Strahlungsformeln Für ein Flächenelement dA, das um ǫr gekippt ist, und ein Flächenelement dF , das um ǫd gekippt ist, gilt für den Strahlungsfluss zwischen den beiden Flächen mit Abstand r und Strahldichte L: dΦ = L · cos ǫr · dA cos ǫd · dF r2 Der gesamte Strahlfluss lässt sich durch Integration über beide Flächen ermitteln: Z Z dΦ Φ= A 8.3.2 F Anwendungen Ulbricht-Kugel Eine diffus strahlende Kugel, die als Lambert-Strahler angenommen werden kann. Der Strahlungsfluss zwischen zwei Flächenelementen der Kugel ist dabei unabhängig von der Position: Fa Fb Φ=L· 4R2 24 8 RADIOMETRIE UND PHOTOMETRIE Abbildung eines Schirms Mit dem Winkel ω des Hauptstrahls und der Fläche F der Eintrittspupille ergibt sich für den Strahlungsfluss: ΦAF (ω) = L · 8.3.3 AF · cos4 ω s2 Zusammenfassung Für die Abbildung einer strahlenden Fläche gilt: • Strahlungsfluss Φ und die effektive Leuchtdichte Lef f = • Beleuchtungsstärke E ′ = ′2 • Lichtstärke I ′ = β 2 nn2 · I 1 β2 ·E L n = L′ n′ sind konstant.