A Mengen und Abbildungen
Werbung

A Mengen und Abbildungen
A.1 Mengen
(i) Durchschnitt: {1, 2, 3, 4} ∩ {3, 4, 5} = {3, 4}
(ii) Vereinigung: {1, 2, 3, 4} ∪ {3, 4, 5} = {1, 2, 3, 4, 5}
(iii) kartesisches Produkt: Menge aller geordneten Paare
{1, 2, 3} × {a, b} = { (1, a), (1, b), (2, a), (2, b), (3, a), (3, b) }
Das kartesische Produkt mit einer leeren Menge ist die leere Menge.
Ausdrücke wie R3 , Zn , Rn bedeuten das mehrfache kartesische Produkt der
Mengen R bzw. Z mit sich selbst.
(iv) Komplement: Sei U ⊆ M . Dann ist V = M \ U die Menge aller Elemente aus
M , die nicht in U sind: {1, 2, 3, 4} \ {1, 3} = {2, 4}. Es ist also V ∪ U = M und
V ∩ U = ;.
(v) Potenzmenge: P M ist die Menge aller Untermengen von M :
P {1, 2, 3} = { ;, {1}, {2}, {3}, {1, 2}, {1, 3}, {2, 3}, {1, 2, 3} }
(vi) disjunkte Vereinigung M t N : Hier setzt man voraus, daß die Elemente von
M und N so definiert sind, daß sie unterschieden werden können. Das kann
man formal immer erreichen, z.B. durch M t N = ( M × {♣}) ∪ ( N × {♥}).
Praktisch ist z.B. mit der „disjunkten Vereinigung zweier Kreise S 1 t S 1 “
einfach gemeint, daß man in dieser Konstruktion die Disjunktheit der
beiden Punktmengen voraussetzt.
A.2 Abbildungen
Definition A.2.1. Eine Abbildung (oder Morphismus oder Funktion) f : M → N
ordnet jedem Element x ∈ M der Definitionsmenge genau ein Element f ( x) ∈ N
der Zielmenge zu.
Auch wenn es altbekannt ist, sollte man sich – wie bei jeder mathematischen
Definition – noch einmal bewußt machen, was hier gefordert wird und was nicht
gefordert wird:
(i) Die Funktion muß für jedes x ∈ M definiert sein. So ist y = 1/ x keine Abbildung R → R, sondern höchstens eine Abbildung R\{0} → R. Es muß allerdings
nicht jedes y ∈ N als Bild eines x auftreten.
(ii) Jedes x ∈ M hat genau ein Bild f ( x). Eine Abbildung muß allerdings nicht
eineindeutig sein, verschiedene x i ∈ M können auf dasselbe y ∈ N abgebildet
werden.
Diese Forderungen, und damit der Abbildungsbegriff, sind also recht „unsymmetrisch“, und das ist Absicht. Sie reichen gerade aus, um folgendes zu garantieren:
Satz A.2.2. Seien f : M → N und g : N → L zwei Abbildungen, deren eine Zielmenge gleich der Definitionsmenge der anderen ist. Dann ist die Zuordnung
M3x
7→
g( f ( x)) ∈ L
wieder eine Abbildung h : M → L im Sinne von Def. A.2.1
113
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
f
g
Definition A.2.3. Diese Abbildung M −
→N−
→ L heißt Komposition g ◦ f von f
und g und wir schreiben:
h= g◦ f :
x 7→ h( x) = g( f ( x)) = ( g ◦ f )( x)
Auf jeder Menge M gibt es die identische Abbildung id M : M → M, x 7→ x ∀ x ∈ M .
Sie ist das neutrale Element der Komposition,
f ◦ id M = id N ◦ f = f
Die Komposition von Abbildungen ist keine kommutative Operation. Im allgemeinen wird die Vertauschung f ◦ g noch nicht einmal definiert sein. Wenn
Definitionsmenge und Zielmenge übereinstimmen: f , g : M → M , dann sind zwar
sowohl f ◦ g als auch g ◦ f definiert, aber in der Regel verschieden. Sei z.B.
f ( x) = x + 1 und g( x) = x2 . Dann ist f ◦ g = x2 + 1 und g ◦ f = ( x + 1)2 .
f
g
k
Die Hintereinanderausführung von 3 Abbildungen k ◦ g ◦ f : M −
→N−
→L−
→K
ist auch ohne Angaben von Klammern eindeutig, also k ◦ g ◦ f = ( k ◦ g) ◦ f = k ◦ ( g ◦ f ).
Satz A.2.4. Die Komposition f ◦ g von Abbildungen ist assoziativ.
Bemerkung A.2.5. Eine Abbildung f : M → N liefert via
[
M ⊇ U 7→ f (U ) :=
f ( x) ⊆ N,
x∈U
immer auch eine Abbildung f : P M → P N der Potenzmengen, welche schlampigerweise mit demselben Symbol f bezeichnet wird. Die Menge f ( M ) ⊆ N nennt
man das Bild von M unter f .
Abb. A.1: Surjektion
Definition A.2.6. Eine Abbildung f : M → N heißt surjektiv oder Surjektion
oder Abbildung von M auf N , wenn f ( M ) = N .
Definition A.2.7. Die Funktion f −1 : N → P M ordnet jedem y ∈ N die (eventuell
leere) Menge seiner Urbilder zu. Dies ist die Menge aller x ∈ M . für die f ( x) = y
gilt:
f −1 : N → P M, f −1 ( y) = { x| x ∈ M, f ( x) = y}.
Definition A.2.8. Eine Abbildung f : M → N heißt injektiv oder Injektion oder
1 : 1 oder eineindeutig, wenn für alle y ∈ N die Menge f −1 ( y) entweder eine leere
oder eine einelementige Menge ist.
Abb. A.3: Injektion
Definition A.2.9. Eine Abbildung f : M → N heißt bijektiv oder Bijektion oder
umkehrbar eindeutig, wenn sie injektiv und surjektiv („eineindeutig auf“) ist.
Satz A.2.10. Wenn f : M → N bijektiv ist, dann existiert die Umkehrfunktion
f −1 : N → M , die jedem y ∈ N sein Urbild x zuordnet, und es gilt
f ◦ f −1 = id N ,
f −1 ◦ f = id M
Wenn f : M → N und g : N → L bijektiv sind, so ist g ◦ f bijektiv und es gilt
( g ◦ f )−1 = f −1 ◦ g−1 .
Das Symbol f −1 wird schlampigerweise mehrdeutig verwendet: sowohl für die
inverse Funktion N → M (die nur für Bijektionen existiert) als auch für die Abbildung N → P M auf die Urbildmengen (die immer existiert).1 Im Allgemeinen
sollte man allerdings Elemente von M und einelementige Untermengen von M
gut auseinanderhalten.
1 Von der Möglichkeit, daß jemand tatsächlich 1/ f meint, gar nicht zu reden.
114
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
A.3 Mächtigkeit von Mengen
Das Folgende ist ein winziger Ausblick auf die ersten Schritte der Theorie transfiniter Mengen, die im Wesentlichen von Georg Cantor (1845–1918) begründet
wurde.
Die Mächtigkeit | M | einer Menge M ist die Verallgemeinerung der Anzahl
ihrer Elemente. Für eine Menge aus n Elementen ist | M | = n.
Definition A.3.1. Zwei Mengen M, N sind von gleicher Mächtigkeit, | M | = | N |,
genau dann, wenn es eine Bijektion f : M → N, f −1 : N → M gibt.
Es gibt also genau so viele natürliche Zahlen, wie es gerade Zahlen gibt, da die
Abbildung x 7→ 2 x eine Bijektion zwischen diesen Mengen liefert. Andererseits
sind die geraden Zahlen eine echte2 Teilmenge von N. Dieses „Paradoxon“ ist die
wesentliche, definierende Eigenschaft unendlicher Mengen.
Definition A.3.2. Eine Menge M heißt unendlich, wenn sie zu einer echten
Teilmenge gleichmächtig ist, d.h., es gibt ein U ⊂ M mit |U | = | M |.
Eine Injektion (1:1-Abbildung) f : M → N liefert immer eine Bijektion auf die
Teilmenge f ( M ) ⊆ N . Dies legt folgende Schreibweise nahe:
Definition A.3.3. Wir schreiben | M | ≤ | N |, wenn es eine Injektion f : M → N
gibt.
Erfüllt diese Definition die Anforderungen einer Ordnungsrelation? Da die
Komposition zweier Injektionen wieder eine Injektion ist, ist die Relation transitiv: Aus | M | ≤ | N | und | N | ≤ |K | folgt | M | ≤ |K |. Natürlich ist sie auch reflexiv,
| M | ≤ | M |, da id M für jede Menge M existiert und bijektiv und damit auch injektiv
ist. Der folgende Satz zeigt, daß diese Relation auch antisymmetrisch ist, also
tatsächlich eine Halbordnung aller Mengen liefert:
Satz A.3.4 (Cantor-Schröder-Bernstein). Wenn es Injektionen M → N und N → M
gibt, dann gibt es auch eine Bijektion zwischen M und N . Mit anderen Worten:
wenn | M | ≤ | N | und | N | ≤ | M |, dann ist | M | = | N |.
Das Cantor-Schröder-Bernstein-Theorem läßt sich ohne Auswahlaxiom beweisen. Man braucht das Auswahlaxiom allerdings, um das Folgende zu beweisen:
Satz A.3.5 (Vergleichbarkeitssatz). Für 2 beliebige Mengen M, N gilt stets:
| M | ≤ | N | oder | N | ≤ | M |. Zusammen mit dem Vorhergehenden ist die (≤)- Relation also eine Totalordnung.
Beispiele
(i) f ( n) = − k falls n = 2 k und f ( n) = k falls n = 2 k − 1 liefert eine Bijektion
f : N → Z. Also ist |N| = |Z|.
(ii) n 7→ ( n, 0) und ( n, m) 7→ 2n 3m sind Injektionen zwischen N und N × N. Also
ist gemäß Cantor-Schröder-Bernstein |N2 | = |N|.
³ ´
²p
(iii) f : Z → Q, f ( n) = n ist injektiv. Ebenso ist g : Q → Z, g q = ²2 p 3 q für
² = ±1, p, q ∈ N, q 6= 0, ggt( p, q) = 1 eine Injektion. Also ist |Q| = |Z| und damit
nach Bsp. (i) auch |Q| = |N|.
(iv) x = tan( y) ist eine Bijektion zwischen dem Intervall (−π/2, π/2) und R. Allgemeiner ist jedes Intervall in R, das mehr als einen Punkt enthält, gleichmächtig zu ganz R.
2 U ⊂ M wenn U ⊆ M und es gibt ein x ∈ M , so daß x ∉ U .
115
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Abb. A.6: | M | ≤ | N |
(v) Eine Injektion R × R → R kann man z.B. konstruieren, indem man die Dezimaldarstellungen zweier Zahlen reißverschlußartig ineinander verzahnt:
P
P
P
j
3n
3 n+1
( ki=−∞ a i 10 i , m
. Also ist auch |R2 | = |R|.
j =−∞ b j 10 ) 7→ n a n 10 + b n 10
P
(vi) Sei U = { n 1 , n 2 , . . . } ⊆ N eine Untermenge von N. Dann ist U 7→ x(U ) = n i ∈U 10−n i
eine Injektion von von P N nach R. Umgekehrt ist V ( x) := { q ∈ Q| q ≤ x}
eine Injektion von R nach P Q. Nach Bsp. (iii) ist |Q| = |N|, also ist auch
|P Q| = |P N| und mit Cantor-Schröder-Bernstein haben wir also gezeigt,
daß
|R| = |P N|.
(A.1)
Nach sovielen Beispielen für Mengen gleicher Mächtigkeit sei erwähnt, daß man
zu jeder Menge eine mächtigere Menge konstruieren kann:
Satz A.3.6 (Cantor). Für eine beliebige Menge M gibt es keine Bijektion zwischen
M und P M . Also ist stets
| M | < |P M |
Beweis. Angenommen, es gäbe eine solche Bijektion f von M auf seine Potenzmenge.
Betrachten wir die Menge U := { x ∈ M | x ∉ f (x)}, die also Element von P M sein muß.
Da f bijektiv ist, muß es ein z ∈ M geben, so daß f (z) = U ist. Es muß nun entweder
z ∈ f (z) = U oder z ∉ f (z) = U gelten. Allerdings führen beide Annahmen zu einem
Widerspruch, denn aus z ∈ U folgt wegen der Definition von U, daß z ∉ f (z) ist.
Ebenso folgt aus z ∉ U, daß z ∈ f (z) sein muß, ebenfalls Widerspruch.
Also gibt es keine Menge größter Mächtigkeit. Man kann durch Potenzmengenbildung P N, P P N, P P P N, . . . immer größere transfinite Mengen konstruieren.
Uns sind in den Beispielen zwei davon begegnet: die Mächtigkeit des abzählbar
Unendlichen
|N| = |Q| = ℵ0
(aleph-null)
und die – gemäß Satz A.3.6 und Gl. (A.1) davon verschiedene – Mächtigkeit des
überabzählbar Unendlichen, des Kontinuums
|P N| = |R| = i1
(beth-eins)
In Anlehnung an die für endliche Mengen geltende Relation |P M | = 2| M | schreibt
man auch manchmal i1 = 2ℵ0 .
Georg Cantor bemühte sich vergeblich, zu beweisen, daß es keine Menge gibt,
deren Mächtigkeit zwischen ℵ0 und i1 liegt:
Kontinuumshypothese (Cantor): Es gibt keine Menge M mit |N| < | M | < |R|.
Heute ist bekannt, daß die Kontinuumshypothese, ähnlich wie das Parallelenaxiom in der Geometrie, unabhängig von den anderen Axiomen der Mengenlehre ist. Man kann sowohl die Kontinuumshypothese als auch eine Verneinung
der Kontinuumshypothese (also z.B. die Annahme, das es noch genau eine Kardinalzahl zwischen ℵ0 und i1 gibt) als Axiom zur Mengenlehre hinzufügen und
erhält so verschiedene widerspruchsfreie Theorien transfiniter Mengen.
116
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
B Algebraische Strukturen
Eine Menge wird zu einer algebraischen Struktur (Gruppe, Ring, ...), wenn auf
ihr eine oder mehrere Operationen (Verknüpfungen) mit gewissen Eigenschaften
definiert sind.
B.1 Gruppen
Gruppen entstehen auf natürliche Art und Weise bei der Beschreibung von
Transformationen und Symmetrien. Sei eine Transformation t eine Bijektion
einer Menge t : X → X . Solche Transformationen kann man hintereinander
t1
t2
ausführen, t0 = t 2 ◦ t 1 : X −→ X −→ X . Im Allgemeinen wird t 1 ◦ t 2 6= t 2 ◦ t 1 sein.
Die Komposition ◦ von Abbildungen ist jedoch assoziativ: t = t 3 ◦ t 2 ◦ t 1 hat auch
ohne Klammern eine eindeutige Bedeutung. Eine Transformation t kann durch
die inverse Transformation t−1 rückgängig gemacht werden.
Wir betrachten nun die t’s als abstrakte Objekte, die miteinander verknüpft
werden können und vergessen die Menge X sowie die Interpretation der Verknüpfung als Komposition von Abbildungen. Dies führt zum folgenden Begriff
einer Gruppe:
Definition B.1.1. Eine Gruppe ist eine nichtleere Menge G mit einer binären
Operation (im Folgenden als Multiplikation geschrieben), die folgende Bedingungen erfüllt:
(i) Assoziativität: (ab) c = a( bc) für alle a, b, c ∈ G ;
(ii) es gibt ein neutrales Element e ∈ G , so daß ea = ae = a für alle a ∈ G ;
(iii) für jedes a ∈ G existiert ein inverses Element a−1 ∈ G , so daß aa−1 = a−1 a = e.
Bemerkung B.1.2. Aus der Definition folgt, daß es genau ein neutrales Element
und genau ein Inverses zu jedem Element gibt. Weiterhin gilt in jeder Gruppe
(ab)−1 = b−1 a−1 ,
(B.1)
denn (ab)( b−1 a−1 ) = a( bb−1 )a−1 = aa−1 = e. Assoziativität garantiert, daß Potenzen a n , n ∈ Z wohldefiniert sind: a(aa)a = (aa)(aa) = a4 etc.
Eine Gruppe, in der für alle a, b gilt ab = ba, heißt kommutativ oder abelsch.
Beispiel B.1.3. Eine Gruppe mit endlich vielen Elementen, |G | < ∞, heißt endliche Gruppe. Jede endliche Gruppe ist isomorph zu einer Untergruppe einer
Permutationsgruppe (Satz von Cayley). Die Permutationsgruppen für mehr als 2
Elemente sind nicht abelsch:
2↔3
1↔2
1↔2
2↔3
(a, b, c) −−−→ (a, c, b) −−−→ ( c, a, b)
(a, b, c) −−−→ ( b, a, c) −−−→ ( b, c, a).
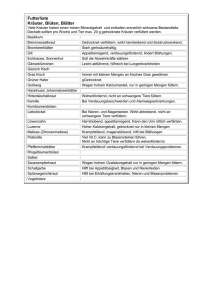
Beispiel B.1.4. Die freie Gruppe mit zwei Generatoren F2 besteht aus allen reduzierten Worten e; a; b; aa; ab; aba; ab−1 ; . . . ; b−1 abbaaab; . . . aus dem Alphabet
{ e, a, b, a−1 , b−1 }. Ein Wort wird reduziert, indem man (i) alle nebeneinanderstehenden Paare aa−1 , a−1 a, bb−1 , b−1 b durch e ersetzt und dann (ii) alle e’s streicht,
solange dies nicht der letzte Buchstabe im Wort ist. Multiplikation ist das Zusammenfügen (und anschließende Reduzieren) von Wörten. Diese Gruppe F2 enthält
abzählbar viele Elemente.
117
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Abb. B.2: Anfang des CayleyGraphen von F2
Beispiel B.1.5. Die Gruppe SO (3) der Drehungen des R3 ist eine Lie-Gruppe, d.h.,
die Gruppenelemente bilden eine glatte Mannigfaltigkeit und die Gruppenoperationen sind glatt. Ein mögliches Bild von der Gruppenmannigfaltigkeit: Sei B3
ein Ball im R3 mit dem Radius π. Dann entspricht jedem Punkt x des Balls eine
Drehung: der Strahl vom Ursprung durch den Punkt x ist die Drehachse. Der
Abstand ≤ π von x zum Ursprung ist der Drehwinkel. Allerdings entsprechen
gegenüberliegende Punkte auf der Oberfläche S 3 = ∂B3 des Balls gerade derselben Drehung. Sie sind also zu identifizieren. Die dadurch entstehende randlose
kompakte 3-dimensionale Mannigfaltigkeit ist isomorph zur Drehgruppe SO (3).
Bemerkung B.1.6. Wenn man zwei zufällige Drehungen a, b aus SO (3) auswählt,
so ist die Wahrscheinlichkeit (bezüglich des Haar-Maßes), daß es keine Relation
(wie z.B. a7 b−3 a2 b5 = e) zwischen ihnen gibt, gleich 1. Mit Wahrscheinlichkeit 1
erzeugen sie also eine Untergruppe der SO (3), welche isomorph zur frei erzeugten
Gruppe F2 ist. Obwohl die Wahrscheinlichkeit 1 ist, muß man für ein konkretes
Paar von Drehungen diese Eigenschaft allerdings beweisen. Ein klassisches
Paar, welches eine F2 erzeugt, ist: a = Drehung um die x-Achse um den Winkel
φ = arccos 13 , b = Drehung um die y-Achse um den gleichen Winkel φ.
Beispiel B.1.7. Sei G eine Gruppe und M eine Menge. Dann ist die Menge der
G -wertigen Funktionen auf M
F ( M,G ) = { f : M → G }
(B.2)
mit der punktweisen Verknüpfung ( f ◦ g)( x) := f ( x) ◦ g( x) wieder eine Gruppe. So
kann man iterativ immer größere Gruppen F ( N, F ( M,G )), . . . erzeugen.
• Bestehe M aus 2 Punkten. Dann ist F ( M,G ) das direkte Produkt G × G .
• Sei M = S 1 und G eine Lie-Gruppe. Die Gruppe der stetigen G -wertigen
Funktionen auf dem Kreis C (S 1 ,G ) ⊂ F (S 1 ,G ) heißt Schleifengruppe (loop
group) von G . Diese Schleifengruppen bilden unendlich-dimensionale Räume. Große Teile der Theorie der (endlich-dimensionalen) Lie-Gruppen lassen sich auf Gruppen dieser Art verallgemeinern, welche daher manchmal
auch unendlich-dimensionale Liegruppen genannt werden.
B.2 Körper
In den Zahlbereichen R, C, Q kann man addieren, subtrahieren, multiplizieren
und (mit einer Ausnahme, dem neutralen Element der Addition) dividieren. Sie
sind Körper (engl. fields).
Definition B.2.1. Ein Körper ist eine Menge K versehen mit zwei binäre Verknüpfungen, Addition und Multiplikation, so daß
(i) (K, +, 0) eine kommutative Gruppe mit neutralem Element 0 und
(ii) (K \ {0}, · , 1) eine kommutative Gruppe mit neutralem Element 1 ist und
(iii) das Distributivgesetz a( b + c) = ab + ac für alle Elemente gilt.
B.3 Ringe
Wiederholen wir nun den Ansatz aus Beispiel B.1.7 und betrachten für einen
Körper wie zum Beispiel R die R-wertige Funktionen F ( M, R) auf einer Mannigfaltigkeit M versehen mit punktweiser Addition und Multiplikation. Letzteres
118
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
bedeutet, daß man f + g und f g definiert durch ihre Wirkung auf x ∈ M via
( f + g)( x) = f ( x) + g( x)
(B.3)
( f g)( x) = f ( x) g( x)
(B.4)
Man sieht leicht, daß F ( M, R) kein Körper ist, da sich eine Körpereigenschaft
nicht überträgt: Es gibt mehr als nur ein nichtinvertierbares Element. Alle
Funktionen, die irgendwo auf M den Wert 0 annehmen, sind nicht invertierbar.
Eine solche algebraische Struktur, eine kommutative additive Gruppe mit
assoziativer Multiplikation und Distributivgesetz, nennt man einen Ring. Der
bekannteste Ring ist wohl Z.
Indem man an die Funktionen aus F ( M, R) Bedingungen stellt, die unter
den Ringoperationen erhalten bleiben, erhält man wichtige Unterringe; so zum
Beispiel C ( M, R), den Ring der stetigen (continuous) Funktionen; C k ( M, R), den
Ring der k-fach differenzierbaren Funktionen oder C ∞ ( M, R), dem Ring der
beliebig oft differenzierbaren (= glatten, smooth) Funktionen auf M .
Von einem Ring wird weder Kommutativität noch Invertierbarkeit der Multiplikation noch Existenz eines neutralen Elemnts der Multiplikation gefordert.
Die bisher angeführten Ringe sind jedoch alle kommutativ und unital (es gibt
ein neutrales Element der Multiplikation, die konstante Funktion f = 1).
Sei M nicht kompakt und C 0 ( M, R) die Menge der stetigen Funktionen mit
kompaktem Träger. Dies ist ein Beispiel für einen kommutativen, nicht unitalen
Ring, in dem kein einziges Element ein Inverses besitzt.
C ( M, R), C k ( M, R), C ∞ ( M, R)
C 0 ( M, R)
B.4 Vektorräume
Vektoren kann man addieren
1.4· =
. Genauer:
+
=
und mit Zahlen multiplizieren
Definition B.4.1. Ein Vektorraum oder linearer Raum V über einem Körper K
ist eine (nichtleere) Menge mit folgender Struktur:
• V ist eine additiv geschriebene abelsche Gruppe
• und auf V ist die Multiplikation mit Skalaren – das sind Elemente aus K –
erklärt, so daß für alle α, β ∈ K und u, v ∈ V gilt
(i) α(βv) = (αβ)v
(ii) α( u + v) = α u + αv
(iii) (α + β)v = αv + βv
(iv) für die Einheit 1 ∈ K gilt 1v = v.
Beispiel B.4.2. Der Körper K selbst ist ein K-Vektorraum. Es ist der kleinste
nichttriviale, der eindimensionale Vektorraum über K. Kleiner ist nur noch der
nulldimensionale Vektorraum, der nur aus dem Nullvektor besteht.
Bemerkung B.4.3. Mathematik ist frei von Diskriminierung: Alles, was die Bedingungen der Definition eines Vektorraumes erfüllt, ist ein Vektorraum – unabhängig davon, ob es unserer Vorstellung von einem solchen Raum entspricht oder
nicht. Das kann auch eine Menge von Differentialoperatoren oder eine Menge
von Funktionen sein.
Beispiel B.4.4. Die einfachste konkrete Realisierung eines Vektorraumes über
einen Körper K ist durch n-Tupel von Zahlen ( x1 , x2 , . . . , xn ) aus K, auf denen eine
Addition gemäß
( x1 , x2 , . . . , xn ) + ( y1 , y2 , . . . , yn ) = ( x1 + y1 , x2 + y2 , . . . , xn + yn )
(B.5)
119
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Vektorraum =
linearer Raum
und eine Multiplikation mit Skalaren gemäß
z · ( x1 , x2 , . . . , xn ) = ( zx1 , zx2 , . . . , zxn )
(B.6)
definiert ist.
B.5 Algebren
Eine Algebra über einen Körper K ist ein K-Vektorraum, auf dem zusätzlich eine
Multiplikation c = a ◦ b der Vektoren definiert ist, welche in beiden Argumenten
linear ist:
λa ◦ µ b = λµ(a ◦ b)
(B.7)
(a + b) ◦ c = a ◦ c + b ◦ c
(B.8)
a ◦ ( b + c) = a ◦ b + a ◦ c
(B.9)
Damit gibt es in einer Algebra drei Operationen — (A) Multiplikation mit
Skalaren aus K, (B) kommutative Addition und Subtraktion und (C) (nicht
notwendig kommutative) Multiplikation.
Die Strukturen (A) und (B) charakterisiert einen linearen Raum; (B) und (C)
einen Ring (falls das Produkt assoziativ ist). Man kann daher eine assoziative
Algebra sowohl als Vektorraum mit zusätzlicher Multiplikation als auch als Ring
mit zusätzlicher linearer Struktur ansehen.
Beispiel B.5.1. Die Funktionenräume C ( M, K) usw. aus Abschnitt B.3 sind also
nicht nur kommutative Ringe, sondern – da man Funktionen auch mit Skalaren
multiplizieren kann – auch kommutative und assoziative Algebren.
assoziative Algebra
Beispiel B.5.2. Die quadratischen n × n-Matrizen mit Einträgen aus K bilden
nicht nur einen n2 -dimensionalen K-Vektorraum sondern mit dem Matrixprodukt
P
c i j = nk=1 a ik b k j eine nichtkommutative assoziative Algebra.
Lie-Algebra
Beispiel B.5.3. Eine Lie-Algebra ist eine Algebra, deren Produkt (welches üblicherweise als [a, b] geschrieben wird) die folgenden Eigenschaften hat:
(i) Antisymmetrie: [a, b] = −[ b, a], insbesondere [a, a] = 0 und
(ii) Jacobi-Identität: [a, [ b, c]] + [ b, [ c, a]] + [ c, [a, b]] = 0
Man kann aus jeder assoziativen Algebra eine Lie-Algebra gewinnen, indem man
definiert [a, b] := a ◦ b − b ◦ a.
Beispiel B.5.4. Der Vektorraum R3 ist mit dem Kreuzprodukt
³
´a × b eine Liez x+ i y
3
Algebra. Mit der Einbettung R → M2 (C) : ( x, y, z) 7→ x− i y − z läßt sich das
Kreuzprodukt als Kommutator einer Matrixalgebra darstellen, und zwar wird
a × b zu 2i [a, b].
Bemerkung B.5.5. Lie-Algebren sind „infinitesimale Versionen von Lie-Gruppen“:
der Tangentialraum am Einselement einer Lie-Gruppe ist eine Lie-Algebra.
B.6 Moduln (über einen kommutativen unitalen Ring)
Schauen wir nun noch auf vektorwertige Funktionen C ( M, V ) oder C ∞ ( M, V ) auf
einer Mannigfaltigkeit, wobei V ein R-Vektorraum sei. Diese Funktionen, versehen mit den punktweisen Operationen Vektoraddition und Skalarmultiplikation,
bilden wieder einen (unendlichdimensionalen) Vektorraum über R.
Interessanter ist jedoch eine andere Betrachtungsweise: Die Vektorfelder
v( x) ∈ C ( M, V ) lassen sich nicht nur mit Skalaren λ ∈ R sondern auch mit Skalarfeldern λ( x) aus dem Ring C ( M, R) multiplizieren. Offensichtlich gelten alle
120
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Vektorraumaxiome aus Def. B.4.1 für C ( M, V ) auch, wenn man C ( M, R) als Menge der Skalare ansieht. Der einzige Unterschied ist, daß C ( M, R) kein Körper
sondern nur ein Ring ist.
Definition B.6.1. Ein Modul M über einem kommutativen unitalen Ring R ist
eine (nichtleere) Menge mit folgender Struktur:
• M ist eine additiv geschriebene abelsche Gruppe
• und auf M ist die Multiplikation mit Elementen aus R erklärt, so daß für
alle α, β ∈ R und u, v ∈ V gilt
(i) α(βv) = (αβ)v
(ii) α( u + v) = α u + αv
(iii) (α + β)v = αv + βv
(iv) für die Einheit 1 ∈ R gilt 1v = v.
Das ist eine Wiederholung der Vektorraumdefinition, nur daß der Skalarkörper
durch einen Ring ersetzt wurde. Moduln können ganz andere Eigenschaften als
Vektorräume haben. Wir werden allerdings nur Moduln begegnen, die sich fast
wie Vektorräume verhalten.
Beispiel B.6.2. Die Räume reeller Vektorfelder C ( M, V ); C ∞ ( M, V ),. . . sind Moduln über den entsprechenden Ringen der Skalarfelder C ( M, R); C ∞ ( M, R), etc.
Bemerkung B.6.3. Wir werden später sehen, daß sich Vektorfelder nur in einfachen Fällen als Elemente von C ( M, V ) verstehen lassen. Aber auch im allgemeineren Fall bleibt wahr, daß sie ein Modul über den Ring der Skalarfelder
bilden.
Halbgruppe
Monoid
Gruppe
abelsche Gruppe
Ring
unitaler Ring
Körper
K-Vektorraum
Modul über
komm. Ring
Assoz. K-Algebra
Lie-Algebra
(über K)
Strukturen mit einer binären inneren Verknüpfung
binäre, assoziative Operation
Halbgruppe mit neutralem Element
Monoid mit Invertierbarkeit
Gruppe mit Kommutativgesetz
Strukturen mit zwei binären inneren distributiven Verknüpfungen
additive abelsche Gruppe + multiplikative Halbgruppe
Ring mit Einselement (multiplikatives Monoid)
additive abelsche Gruppe und K \ {0} multiplikative abelsche Gruppe
Strukturen mit innerer und verträglicher äußerer Verknüpfung
additive abelsche Gruppe + Multiplikation mit Skalaren
additive abelsche Gruppe + Multiplikation mit Ringelementen
Strukturen mit zwei inneren und einer äußeren Verknüpfung
K-Vektorraum und Halbgruppe (bilinear)
K-Vektorraum und Lie-Klammer (bilinear, antisymm., Jacobi-Id.)
Tabelle B.1: Algebraische Strukturen
121
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
(Z+ , +)
(N, +, 0)
(Z, +, 0)
(Z, +, 0)
C 0 ( M, R)
Z; C ( M, R)
R; C ; Q
Rn
C ( M, Rn )
M n (R)
(R3 , ×)
C Topologische Räume
Ein Punkt ist, was keine Teile
hat. – Euklid, Elemente, Buch 1,
Definition 1, um 325 v.Chr.
In der Mathematik sind Räume mit einer Struktur versehene Mengen. Die Elemente der Menge sind unterscheidbar, jede eventuelle weitere Struktur wird
jedoch ignoriert – sie sind die Punkte des Raumes und ansonsten ohne Eigenschaften.
Die Minimalstruktur, die eine Punktmenge braucht, um von Stetigkeit, Grenzwerten, Umgebungen etc. reden zu können, ist die des topologischen Raumes.
Ohne diese Struktur – also nur mit Begriffen der Mengentheorie – können
wir noch nicht einmal definieren, wann eine Punktmenge zusammenhängend
ist. Schließlich lassen sich sowohl
als auch
als Vereinigung disjunkter
Teilmengen M = M1 ∪ M2 darstellen. Im zweiten Fall wird es jedoch immer
Punkte in einer Teilmenge geben, die die andere Teilmenge berühren.
Ein Weg zur Einführung einer Topologie auf einer Punktmenge ist es, diesen
Begriff des Berührungspunktes formal zu fassen.
Betrachten wir einen Punkt x ∈ M und eine Untermenge U ⊂ M . Solange M
nur die Struktur einer Menge hat, können wir nur sagen, ob x zu U gehört, x ∈ U
oder nicht, x ∉ U .
C.1 Definition einer Topologie
Die Punktmenge M wird zu einem topologischen Raum1 , wenn wir eine weitere
Relation zwischen Punkten und Untermengen gegeben haben: x kann U berühren,
auch wenn x nicht zu U gehört. Wir schreiben dies als x C U . Es erweist sich
als sinnvoll, zu fordern, daß alle Punkte aus U auch zu den Berührungspunkten
zählen, also x ∈ U ⇒ x C U .
Abgeschlossene Hülle
Definition C.1.1. Die Menge aller Berührungspunkte von U nennen wir die
abgeschlossene Hülle [U ] := { x| x C U } von U . Nach dem eben Gesagten ist also
U ⊆ [U ].
Punkte, die U berühren ohne zu U zu gehören, nennen wir nichttriviale Berührungspunkte.
Beispiel C.1.2. Topologien können recht exotisch sein. Das zahme Standardbeispiel ist die Gerade R mit der üblichen Topologie, in der offene Intervalle (a, b) die
zusätzlichen Berührungspunkte a und b haben und ihre abgeschlossene Hülle
also das abgeschlossene Intervall [a, b] ist. Mit diesem Beispiel im Hinterkopf
sollten die folgenden Definitionen sinnvoll erscheinen.
1 oder: wird topologisiert oder: wird mit einer Topologie versehen
122
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Definition C.1.3 (Definition A eines topologischen Raumes). Ein topologischer
Raum ( M, C) ist eine Menge M , zwischen deren Punkten und Untermengen eine
Relation x C U definiert ist, die folgenden Bedingungen genügt:
(i) Kein Punkt berührt die leere Menge:
Für alle x ∈ M gilt: x 6 ;.
oder:
[;] = ;
(ii) Alle Punkte einer Untermenge berühren diese:
Für alle U ⊆ M gilt: wenn x ∈ U , dann x C U .
oder:
U ⊆ [U ]
(iii) Vereinigung von zwei Untermengen erzeugt keine neuen Berührungspunkte
und vernichtet auch keine:
Für alle U, V ⊂ M gilt x C (U ∪ V ) genau dann, wenn x C U oder x C V .
oder:
[U ∪ V ] = [U ] ∪ [V ]
(iv) Das Bilden der abgeschlossenen Hülle erzeugt keine neuen Berührungspunkte, d.h., für alle U ⊂ M gilt:
[[U ]] = [U ].
Es ist [ M ] = M , da es keine möglichen Berührungspunkte außerhalb von M gibt.
Bevor wir diese Definition, die sogenannten Kuratowskischen Hüllenaxiome,
kommentieren, sei erst einmal gezeigt, wie man mit dieser Struktur weitere
Begriffe definieren kann.
Definition C.1.4. Ein topologischer Raum M heißt nicht zusammenhängend,
wenn er in zwei nichtleere Teilmengen M1 und M2 geteilt werden kann
M = M1 ∪ M2 , so daß es keinen Punkt in M gibt, der sowohl M1 als auch M2
berührt: [ M1 ] ∩ [ M2 ] = ;.
Zusammenhang
Damit ist klar, daß
zusammenhängend ist und
nicht. „Nicht zusammenhängend“ [ M1 ] ∩ [ M2 ] = ; ist eine stärkere Forderung als „disjunkt“ M1 ∩ M2 = ;.
Definition C.1.5. Seien N, M topologische Räume. Eine Abbildung f : M → N
ist stetig, wenn sie die Berührungseigenschaft erhält. Das heißt, daß für alle
Untermengen U ⊆ M gilt: Wenn x die Menge U berührt, dann berührt f ( x) auch
das Bild f (U ).
oder:
x C U =⇒ f ( x) C f (U )
(C.1)
x ∈ [U ] =⇒ f ( x) ∈ [ f (U )]
(C.2)
Definition C.1.6. Eine Abbildung f : M → N zwischen topologischen Räumen
ist ein Homöomorphismus, wenn sie bijektiv ist und sowohl f als auch die
Umkehrabbildung f −1 : N → M stetig sind.
Topologische Räume sind homöomorph, wenn zwischen ihnen ein Homöomorphismus existiert, d.h., es gibt eine Bijektion der zugrundeliegenden
Punktmengen, die in beiden Richtungen die Berührungseigenschaft erhält,
x C U ⇐⇒ f ( x) C f (U ).
Bemerkung C.1.7. Die Forderung nach Stetigkeit auch der Umkehrabbildung ist
wesentlich. Sei
f : [0, 2π) → S 1 ⊂ R2
φ 7→ (cos φ, sin φ)
123
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Stetigkeit
Homöomorphismus
Abb. C.2: Mug ∼
= Donut
die stetige Abbildung von einem halboffenen Intervall auf einen Kreis. Sie ist
bijektiv (1:1), aber ihre Umkehrung ist nicht stetig. Die Umkehrung f −1 zerstört
die Berührungseigenschaft von (1, 0) C {(cos φ, sin φ) | a ≤ φ < 2π}, der Kreis wird
von f −1 an dieser Stelle zerrissen. Halboffenes Intervall und Kreis sind also nicht
homöomorph.
Beispiel C.1.8. Ein offenes Intervall in R ist homöomorph zu ganz R. Ein Homöomorphismus ist z.B.
f = tan( x) : (−π/2, π/2) → R.
C.2 Abgeschlossene und offene Mengen
Mit der Definition eines topologischen Raumes haben wir unseren mengentheoretischen Werkzeugkasten (Vereinigung, Schnittmenge, Komplementmenge) um
eine weitere Operation, die Hüllenbildung [] erweitert. Damit kann man nun zu
spielen anfangen:
offene und abgeschlossene Teilmengen
http://abstrusegoose.com/394
Definition C.2.1 (Definition A1). Eine Teilmenge U ⊆ M eines topologischen
Raumes heißt abgeschlossen, wenn sie gleich ihrer abgeschlossenen Hülle ist,
also wenn [U ] = U gilt.
Eine Teilmenge V heißt offen, wenn sie das Komplement einer abgeschlossenen
Menge ist, V = M \ [U ].
Bemerkung C.2.2. Die Eigenschaften offen und abgeschlossen sind weder
Gegensätze noch klassifizieren sie alle Teilmengen. Es gibt Mengen, die weder
offen noch abgeschlossen sind – z.B. halboffene Intervalle { x|a < x ≤ b} in R – und
Mengen, die sowohl offen als auch abgeschlossen sind. In jedem topologischen
Raum M sind z.B. M selbst und ; sowohl abgeschlossen (gemäß Definition C.1.3)
als auch offen – da sie Komplementmengen voneinander sind.
Die Komplementbildung U ↔ M \ U liefert eine Bijektion zwischen offenen
und abgeschlossenen Untermengen; es gibt in einem topologischen Raum gleich
viele offene und abgeschlossene Untermengen.
Aus der Definition C.1.3 einer Topologie folgen weitere Eigenschaften abgeschlossener und offener Mengen, die oft benötigt werden.
Satz C.2.3. Sei ( M, C) bzw. ( M, [.]) ein topologischer Raum. Sei A das Mengensystem der abgeschlossenen Untermengen von M , d.h., U ∈ A ⇐⇒ [U ] = U . Dann
gilt:
(i) M und die leere Menge sind abgeschlossen: ;, M ∈ A .
(ii) Die Vereinigung zweier abgeschlossener Mengen ist abgeschlossen:
A1, A2 ∈ A ⇒ A1 ∪ A2 ∈ A .
(iii) Der Durchschnitt beliebig vieler abgeschlossener Mengen ist abgeschlossen:
T
A i ∈ A für i ∈ I ⇒ i∈ I A i ∈ A .
Beweis. (i) und (ii) folgen sofort aus dem 1. und 3. Punkt unserer Definition C.1.3
eines topologischen Raumes. Zu (iii) bemerken wir zunächst, daß aus U ⊆ V folgt,
daß [U] ⊆ [V ]. Es ist nämlich [V ] = [(V \ U) ∪ U] = [V \ U] ∪ [U].
T Sei nun B ⊂ A eine
nichtleere Familie von abgeschlossenen Mengen und B0 = B : B ∈ B ihr Durchschnitt. Dann ist B0 in jedem Mitglied B ∈ B enthalten und daher ist, wie eben
bemerkt, auch [B0 ] in jedem [B] enthalten, damit also auch in deren Durchschnitt.
Andererseits ist [B] = B für alle B ∈ B und somit ist [B0 ] ⊆ B0 . Da nach C.1.3.(ii)
B0 ⊆ [B0 ] ist also [B0 ] = B0 .
Erinnern wir uns an die De Morgan’schen Gesetze der Mengenlehre: Das
Komplement eines Durchschnitts ist gleich der Vereinigung der Komplemente
Ã
!
\
[
M\
Ui =
(M \ Ui )
(C.3)
i∈ I
i∈ I
124
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
und umgekehrt ist, indem man auf beiden Seiten das Komplement bildet und U i
in M \ U i umbenennt, das Komplement der Vereinigung gleich dem Durchschnitt
der Komplemente:
Ã
!
[
\
M\
Ui =
(M \ Ui )
(C.4)
i∈ I
i∈ I
Damit folgt aus Satz C.2.3 durch Dualisierung (offen⇔ abgeschlossen, U ⇔ M \U ,
Durchschnitt ⇔ Vereinigung) sofort:
Satz C.2.4. Sei ( M, C) bzw. ( M, [.]) ein topologischer Raum. Sei O das System der
offenen Untermengen von M , d.h., U ∈ O ⇐⇒ [ M \ U ] = M \ U . Dann gilt:
(i) M und die leere Menge sind offen: ;, M ∈ O .
(ii) Der Durchschnitt zweier offener Mengen ist offen: O1 , O2 ∈ O ⇒ O1 ∩ O2 ∈ O .
(iii) Die Vereinigung beliebig vieler offener Mengen ist offen:
S
O i ∈ O für i ∈ I ⇒ i∈ I O i ∈ O .
C.3 Alternative Definition eines topologischen
Raumes
Die von uns verwendete Definition C.1.3 eines topologischen Raumes hat den
Vorteil, daß sie zu recht anschaulichen Definitionen von z.B. Stetigkeit führt.
Sie hat den Nachteil, daß es recht schwer ist, eine Topologie in dieser Sprache
explizit anzugeben. Deshalb wird meist die Definition einer Topologie über offene
Mengen bevorzugt. Dabei stellt man die gerade bewiesenen Eigenschaften offener
Mengen als axiomatische Forderungen an den Anfang:
Definition C.3.1 (Definition B eines topologischen Raumes). Ein topologischer
Raum ( M, O ) ist eine Menge M versehen mit einem Mengensystem O von Untermengen (den offenen Mengen), welches folgende Eigenschaften hat:
(i) M selbst und die leere Menge sind offen, M ∈ O und ; ∈ O .
(ii) Der Durchschnitt zweier (und damit endlich vieler) offener Mengen ist offen,
O1 , O2 ∈ O =⇒ O1 ∩ O2 ∈ O .
(iii) Die Vereinigung beliebig vieler offener Mengen ist offen,
S
O i ∈ O für i ∈ I =⇒ i∈ I O i ∈ O
und definiert davon ausgehend:
Definition C.3.2 (Definition B1). Eine Menge U ⊆ M heißt abgeschlossen, wenn
sie das Komplement einer offenene Menge ist, U = M \ O, O ∈ O .
Die abgeschlossene Hülle [U ] einer Untermenge U ist der Durchschnitt aller
abgeschlossenene Mengen, die U enthalten.
Satz C.3.3. Die Definitionen Def. C.1.3 (A) und Def. C.3.1 (B) sind äquivalent.
Das heißt: 1. Sei ein topologischer Raum gemäß Definition A gegeben und seine
offenen Untermengen durch Definition A1 (C.2.1) definiert. Dann erfüllen diese
offenen Untermengen die Forderungen von Definition B.
2. Sei ein topologischer Raum gemäß Definition B gegeben und die Bildung der
abgeschlossenen Hülle durch Definition B1 definiert. Dann erfüllt diese Hüllendefinition die Forderungen von Definition A.
125
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Beweis. 1. (A, A1 ⇒ B) wurde bereits als Satz C.2.4 bewiesen.
2. (B, B1 ⇒ A): Aus B.(iii) folgt durch Komplementbildung, daß der Durchschnitt beliebig vieler abgeschlossenener Mengen abgeschlossen ist. Also ist nach B1 die Hülle
[U] abgeschlossen und es ist die kleinste abgeschlossene Menge, die U enthält. Wenn
U selbst abgeschlossen ist, dann ist es natürlich die kleinste abgeschlossene Menge,
die U enthält und daher ist [U] = U. Daraus folgt das Lemma: U ist abgeschlossen
genau dann, wenn [U] = U.
A.(i): aus B.(i) folgt, daß ; abgeschlossen ist. Mit dem Lemma ist also [;] = ;.
A.(ii) folgt sofort aus B1.
A.(iii): [U] ∪ [V ] ist eine abgeschlossene Menge, die U und V enthält. Also ist
[U ∪ V ] ⊆ [U] ∪ [V ]. Für die Inklusion in der anderen Richtung bemerken wir zuerst,
daß aus A ⊆ B folgt, daß [A] ⊆ [B] (vgl. Beweis von Satz C.2.3).Nun enthält U ∪ V
sowohl U als auch V , also enthält [U ∪ V ] sowohl [U] als auch [V ] und somit ist
[U] ∪ [V ] ⊆ [U ∪ V ]. Damit ist A.(iii) bewiesen.
A.(iv) folgt, wenn man das Lemma auf [U] anwendet: [U] ist abgeschlossen, also
[[U]] = [U].
Man kann nun alle topologischen Grundbegriffe definieren, indem man das
System der offenen Mengen zum Ausgangspunkt nimmt. Insbesondere wird
Stetigkeit meist definiert durch die Forderung, daß die Urbilder offener Mengen
stets offen sind. Diese Definition ist äquivalent zu Def. C.1.5:
Satz C.3.4. Sei f : M → N eine Abbildung topologischer Räume. Dann sind die
fogenden Bedingungen äquivalent (und definieren Stetigkeit):
(i) Für alle U ⊆ M gilt: x C U =⇒ f ( x) C f (U ).
(ii) Für alle U ⊆ M gilt: f ( [U ] ) ⊆ [ f (U )].
(iii) Für jede abgeschlossene Untermenge V ⊆ N gilt: Das Urbild f −1 (V ) ist
abgeschlossen in M .
(iv) Für jede offene Untermenge V ⊆ N gilt: Das Urbild f −1 (V ) ist offen in M .
C.4 Teilraumtopologie
Ein Teilraum U ⊂ M eines topologischen Raumes ist auf natürliche Weise selbst
ein topologischer Raum: Er erbt eine Topologie von M .
Definition-Theorem C.4.1. Sei ( M, C) ein topologischer Raum und U ⊂ M .
Dann ist (U, C) ebenfalls ein topologischer Raum. Diese Topologie heißt von der
Einbettung U ⊂ M induzierte Teilraumtopologie.
In der Sprache der Systeme offener Mengen entspricht dem:
Satz C.4.2. Sei ( M, O ) ein topologischer Raum und U ⊂ M . Wir betrachten auf O
die Äquivalenzrelation
O1 ∼ O2
⇐⇒
O1 ∩ U = O2 ∩ U.
(C.5)
Sei eine Äquivalenzklasse unter dieser Relation repräsentiert durch die Menge
O 0 = O ∩ U , welche für alle Mitglieder einer Äquivalenzklasse gleich ist und diese
Klasse eindeutig charakterisiert. Dann ist (U, O 0 = {O 0i }) der topologische Raum U
mit der Teilraumtopologie.
Das sieht ziemlich trivial aus: Die offenen Mengen von U sind gerade die
Schnitte der offenen Teilmengen von M mit U . Es sei aber bemerkt:
(i) Die O i ∩ U sind als Teilräume von M nicht unbedingt offen. Beispiel: Sei
M = R,U = [0, 2], O = (1, 3). Dann ist O ∩ U = (1, 2] offen in U , aber nicht offen
in M .
126
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
(ii) Egal, ob U in M offen oder abgeschlossen oder nicht ist: bezüglich der
U -Topologie ist es offen und abgeschlossen.
(iii) Genau dann, wenn U in M selbst offen ist, sind alle bezüglich U offenen
Teilmengen von U auch offen in M .
C.5 Innere, äußere und Randpunkte
Eine Untermenge U eines topologischen Raumes induziert eine Dreiteilung der
Punkte des Raumes: in innere, äußere und Randpunkte von U . Ein äußerer Punkt
soll nicht nur außerhalb von U sondern auch außerhalb von [U ] liegen:
Innere, äußere und Randpunkte
Definition C.5.1. Ein Punkt x ∈ M ist äußerer Punkt von U , wenn x ∈ M \ [U ].
Einen inneren Punkt definieren wir nun als zum äußeren Punkt dualen Begriff:
innere Punkte von U sind äußere Punkte des Komplements M \U und umgekehrt.
Also ersetzen wir in obiger Definition U durch M \ U und erhalten:
Definition C.5.2. Das Innere U ◦ einer Teilmenge U eines topologischen Raumes
M ist das Komplement des Abschlusses des Komplements:
U ◦ := M \ [ M \ U ].
Inneres
(C.6)
Ein Punkt x ist ein innerer Punkt, wenn x ∈ U ◦ . Das Innere U ◦ ist, als Komplement einer abgeschlossenen Menge, immer offen.
Der Rest von M , die nicht-äußeren und nicht-inneren Punkte, ist der Rand. Da
Inneres und Äußeres offen sind, ist der Rand abgeschlossen. Da die nicht-äußeren
Punkte gerade [U ] bilden, gilt:
Definition C.5.3. Der Rand von U ist die Menge ∂U = [U ] \ U ◦ .
Damit sieht man leicht: eine Menge ist abgeschlossen, wenn sie alle ihre Randpunkte enthält. Sie ist offen, wenn sie keinen ihrer Randpunkte enthält. Wenn
sie einen Teil ihrer Randpunkte enthält, ist sie weder offen noch abgeschlossen.
Wenn sie keine Randpunkte besitzt, ∂U = ;, ist sie offen und abgeschlossen.
Weiterhin gilt: Das Innere U ◦ ist die Vereinigung aller offenen Mengen, die
vollständig in U liegen. Damit ist es die größte offene Menge, die in U liegt.
Die Hülle [U ] ist der Durchschnitt aller abgeschlossenen Mengen, in denen U
liegt. Damit ist es die kleinste abgeschlossene Menge, die U enthält.
Beispiel C.5.4. Wir betrachten wieder R mit der Standardtopologie. Sei
U1 = (a, b] ein halboffenes Intervall. Dann ist U1◦ = (a, b), ∂U1 = {a, b} und
[U1 ] = [a, b]. Sei U2 die Untermenge aus einem Punkt U2 = { p}. Dann ist
U2◦ = ;, [U2 ] = ∂U2 = U2 = { p}.
C.6 Umgebung, Grenzwert, Konvergenz
Definition C.6.1. Eine Menge U heißt Umgebung des Punktes x, wenn x ein
innerer Punkt von U ist, d.h., wenn x ∈ U ◦ .
Umgebung
Definition C.6.2. Der Punkt x ist Grenzwert der Folge { x i } i∈N , wenn jede Umgebung U x von x fast alle Folgenglieder enthält: x i ∈ U x bis auf endlich viele
Ausnahmen. Man sagt dann: die Folge konvergiert gegen x oder kurz: x i → x.
Grenzwert, Konvergenz
127
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Bemerkung C.6.3. Dies ist natürlich äquivalent zu der Formulierung: Zu jeder
Umgebung von x gibt es ein k, so daß alle x i mit i > k in der Umgebung liegen.
Wenn man sich die Folge als einen Zeitablauf vorstellt, kann man anschaulich
sagen: Der Punkt x ist Grenzwert der Folge, wenn für jede Umgebung U x gilt:
wenn man nur lange genug wartet, bleibt die Folge der x i schließlich für immer
in U x .
Satz C.6.4. Stetige Abbildungen erhalten Konvergenz und vertauschen mit Grenzwertbildung (sie sind folgenstetig):
Wenn f stetig und x i → x, dann konvergiert auch die Folge der Bildpunkte f ( x i ) –
und zwar gegen das Bild des Grenzwertes, f ( x i ) → f ( x).
Beweis. Fast trivial aus der Stetigkeitsdefinition in der Form von Satz C.3.4,
Punkt (ii). Sei V eine offene Umgebung von f ( x). Dann ist f −1 (V ) also eine offene
Umgebung von x und die Folge bleibt irgendwann in f −1 (V ). Also bleibt die
Bildfolge dann auch in V , konvergiert also gegen f ( x).
C.7 Beispiele topologischer Räume
Diskrete Topologie
1. Man kann jeder Menge M sofort eine Topologie verpassen, indem man postuliert: es gibt keine nichttrivialen Berührungspunkte, x C U nur wenn x ∈ U ,
also [U ] = U für alle Untermengen. Damit sind alle Untermengen zugleich offen
und abgeschlossen und alle Funktionen auf M sind stetig. Diese Topologie wird
diskrete Topologie genannt da in ihr alle Punkte isoliert sind und sich niemand
berührt. Es ist die natürliche Topologie für abzählbare Punktmengen, wie zum
Beispiel M = Z.
Klumpentopologie
2. Man kann jeder Menge M sofort eine Topologie verpassen, indem man postuliert: jede nichtleere Menge wird von allen Punkten berührt, [U ] = M für alle
U 6= ;. Dann sind M, ; die einzigen offenen und auch die einzigen abgeschlossenen Mengen. Die einzigen stetigen Funktionen f : M → R sind die konstanten
Funktionen. Diese Topologie wird indiskrete Topologie oder Klumpentopologie
genannt, da sich alle Punkte und Untermengen berühren, also verklumpt sind.
Diese beiden Extremfälle entsprechen gerade nicht unserer Vorstellung von
einem Raum als einem Kontinuum. In ihm darf es also nicht zu wenig und nicht
zu viele offenen Mengen (und damit auch abgeschlossene Mengen) geben.
C.8 Hausdorff-Räume
U2
y
U1
x
Abb. C.3: Hausdorff-Raum
Eine Forderung. um Topologien mit zu wenig offenen Mengen (und also auch zu
wenig abgeschlossenen Mengen) auszuschließen, ist die Hausdorff-Eigenschaft.
Definition C.8.1. Ein topologischer Raum M ist ein Hausdorff-Raum, wenn es
zu je zwei verschiedenen Punkten x, y ∈ M disjunkte offene Umgebungen gibt,
d.h., es gibt U1 ,U2 ∈ O so daß x ∈ U1 , y ∈ U2 und U1 ∩ U2 = ;. Mit anderen Worten:
alle Punkte des Raumes lassen sich durch offene Mengen trennen.
Ein Raum mit der Klumpentopologie ist nicht hausdorffsch. Ein Raum mit der
diskreten Topologie ist hausdorffsch - die Punkte selbst (genauer: die Untermengen aus einem Punkt U = { p}) sind ja offen in einem solchen Raum.
Beispiel C.8.2. Ein Beispiel für einen nicht hausdorffschen Raum ist die Gerade
mit zwei Ursprüngen. Dies ist der Quotientenraum von zwei Kopien der reellen
Achse R × {a} und R × { b} bezüglich der Äquivalenzrelation ( x, a) ∼ ( x, b) für alle
x 6= 0; also eine Gerade, bei der der Punkt 0 doppelt vorkommt. Diese beiden
128
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Ursprünge lassen sich nicht durch offene Mengen trennen, jede Umgebung von
0a enthält gemeinsame Punkte mit jeder Umgebung von 0b .
Das Beispiel zeigt eine weitere unschöne Eigenschaft von nicht hausdorffschen
Räumen: Eine Folge kann mehr als einen Grenzwert haben. Jede Nullfolge
konvergiert sowohl gegen 0a als auch gegen 0b .
Satz C.8.3. In einem Hausdorff-Raum kann eine Folge höchstens einen Grenzwert
haben.
0b
0a
Abb. C.6: Gerade mit zwei
Ursprüngen
Beweis. Wenn xn → x und x0 6= x, dann gibt es disjunkte Umgebungen U von x und
U 0 von x0 . Daher können höchstens endliche viele Folgenglieder in U 0 liegen, die
Folge kann also nicht gegen x0 konvergieren.
C.9 Zweite Abzählbarkeitseigenschaft
Eine Forderung, um Topologien mit zu vielen offenen Mengen auszuschließen, ist
die sogenannte zweite Abzählbarkeitseigenschaft. Zu ihrer Definition brauchen
wir noch einen Begriff, der sowieso nützlich ist: Es wird im allgemeinen nicht
möglich sein, zur Definition einer Topologie alle offenen Mengen eines Raumes
aufzulisten. Das ist auch nicht nötig.
Definition C.9.1. Eine Basis für eine Topologie ( M, O ) ist ein System B von
offenen Mengen, aus dem sich alle offen Mengen durch Vereinigung gewinnen
lassen. Man sagt: B erzeugt O .
Basis einer Topologie
Damit ein Mengensystem eine Topologie erzeugt, ist offenbar zweierlei nötig:
S
(i) B muß M überdecken, B∈B B = M .
(ii) Der Durchschnitt zweier Mengen B1 , B2 aus B muß offen sein, also als
Vereinigung von Mengen aus B darstellbar sein. Dies wird erreicht, wenn
man fordert:
Sei I = B1 ∩ B2 ein nichtleerer Durchschnitt zweier Basismengen. Dann soll
es für jeden Punkt x ∈ I eine Basismenge B3 ∈ B geben, so daß x ∈ B3 ⊆ I .
Beispiel C.9.2. Die Menge B aller offenen Intervalle B = (a, b) bildet eine Basis
für die Standardtopologie von R.
Dies ist eine Basis: der Durchschnitt zweier offener Intervalle ist, falls nicht
leer, wieder ein offenes Intervall. Diese Basis ist natürlich nicht minimal. Eine
wesentlich kleinere Basis für die Standardtopologie von R bekommt man, wenn
man sich auf Intervalle mit rationalen Endpunkten beschränkt.
Beispiel C.9.3. Die Menge B aller offenen Intervalle mit rationalen Randpunkten
B = (a, b), a, b ∈ Q bildet eine Basis für die Standardtopologie von R. Diese Basis
ist isomorph zu Q × Q und somit abzählbar.
Definition C.9.4. Ein topologischer Raum besitzt die zweite Abzählbarkeitseigenschaft2 , wenn seine Topologie eine abzählbare Basis besitzt.
Bemerkung C.9.5. Die zweite Abzählbarkeitseigenschaft impliziert Separabilität.
(Die umgekehrte Implikation gilt nicht.) Ein topologischer Raum M ist separabel,
wenn es eine Teilmenge D gibt, welche (a) abzählbar und (b) dicht in M (d.h.,
[D ] = M ) ist. Zum Beispiel ist [Qn ] = Rn , der Rn also separabel.
Das offene Mengensytem eines Raumes mit der zweiten Abzählbarkeitseigenschaft hat höchstens die Mächtigkeit von R, also |O | ≤ |R| = 2ℵ0 .
2 Diese Bezeichnung ist etwas sperrig. Es gibt natürlich auch eine erste Abzählbarkeitseigenschaft
(welche schwächer ist). Oft wird auch von den zwei Abzählbarkeitsaxiomen gesprochen. Im
Englischen tut man sich mit der Bildung von Adjektiven leichter und redet von einem secondcountable space.
129
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Zweite Abzählbarkeitseigenschaft
Ein Raum mit der diskreten Topologie erfüllt die zweite Abzählbarkeitseigenschaft nur, wenn er aus höchstens abzählbar vielen Punkten besteht. (Es müssen
ja alle Einpunkt-Untermengen zur Basis gehören, da sie offen und nicht durch
Vereinigung bildbar sind.)
Wenn wir also von der Topologisierung einer überabzählbaren Punktmenge
fordern, daß die Topologie hausdorffsch sein und das 2. Abzählbarkeitsaxiom
erfüllen soll, haben wir u.a. die diskrete Topologie und die Klumpentopologie
schon mal ausgeschlossen.
C.10 Metrisierbarkeit
Abstand
Definition C.10.1. Eine Funktion d ( x, y) : M × M → R≥0 heißt Abstandsfunktion,3
wenn sie folgende Eigenschaften für alle Punkte x, y, z ∈ M hat:
(i) Definitheit: d ( x, y) ≥ 0 und d ( x, y) = 0 genau dann, wenn x = y;
(ii) Symmetrie: d ( x, y) = d ( y, x);
(iii) Dreiecksungleichung: d ( x, y) ≤ d ( x, z) + d ( z, y)
Beispiel C.10.2. Beispiele für Abstandsfunktionen im Rn :
qP
d
2
(i) Euklidischer Abstand: d ( x, y) =
i =1 ( x i − yi ) .
P
(ii) Manhattan-Abstand: d ( x, y) = di=1 | x i − yi |. Im diskreten Fall von N2 (unendliches Schachbrett) ist dies die Anzahl der Felder, die ein Turm minimal
überstreichen muß, um von x nach y zu gelangen.
(iii) Tschebyschew-Abstand: d ( x, y) = max i | x i − yi |. Auf dem Schachbrett ist dies
die minimale Anzahl der Züge, die ein König machen muß, um von x nach y
zu gelangen.
(iv) Ein Nicht-Beispiel: die Zeit, um mit öffentlichen Verkehrsmitteln von A
nach B zu gelangen. Wenn der schnellste Weg von A nach B über C führt,
das Umsteigen in C aber Zeit kostet, dann ist die Dreiecksungleichung
verletzt, da d ( A, B) > d ( A, C ) + d (C, B).
Einen Eindruck von einer Abstandsfunktion kann man bekommen, wenn man
sich anschaut, wie die mit dieser Abstandsfunktion definierten Bälle mit Radius
r > 0 um einen Punkt p ∈ M
B( p, r ) = { x ∈ M | d ( x, p) < r }
x
p
x
(C.7)
aussehen. Wie die obigen Beispiele zeigen, müssen diese Bälle nicht unbedingt
rund sein. Allerdings schränkt die Dreiecksungleichung die zulässigen Formen
ein. Sie garantiert insbesondere, daß es zu jedem Punkt x ∈ B( p, r ) immer einen
Ball B( x, s) um x gibt, der völlig in B( p, r ) liegt. Man wähle einfach den Radius s
kleiner als r − d ( x, p). Damit ist für jeden Punkt z ∈ B( x, s) also d ( z, x) < r − d ( x, p),
mit der Dreiecksungleichung somit d ( z, p) ≤ d ( z, x) + d ( x, p) < r , also liegt z auch
in B( p, r ).
Dasselbe gilt dann auch für die Schnittmenge zweier Bälle B( p 1 , r 1 ) und
B( p 2 , r 2 ): um jeden Punkt aus der Schnittmenge kann man einen Ball konstruieren, der völlig in der Schnittmenge liegt. Man wähle dazu einfach den
Radius s so, daß er kleiner als r 1 − d ( x, p 1 ) und kleiner als r 2 − d ( x, p 2 ) ist.
Damit erfüllt die Menge aller Bälle die (nach Def. C.9.1 diskutierten) Bedingungen, um als Basis einer Topologie zu dienen.
3 Ich vermeide hier den Begriff Metrik. Dieser soll für die wesentlich speziellere Riemannsche Metrik
reserviert bleiben.
130
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Definition-Theorem C.10.3. Wenn d (., .) eine Abstandsfunktion auf einer Menge M ist, dann ist die Menge aller Bälle {B( p, r ) | p ∈ M, r > 0} eine Basis für
eine Topologie auf M . Sie wird die von d (., .) induzierte Topologie auf M genannt.
( M, d ) mit dieser Topologie heißt metrischer Raum.
Definition C.10.4. Ein topologischer Raum ( M, O ) oder ( M, C) heißt metrisierbar, wenn es eine Abstandsfunktion d (., .) gibt, die die Topologie von M induziert.
Bemerkung C.10.5. Ein metrisierbarer Raum ist immer hausdorffsch: man kann
zwei Punkte x 6= y immer durch Bälle um x und y trennen, deren Radius kleiner
als d ( x, y)/2 ist.
Beispiel C.10.6. Die diskrete Topologie (s. Anfang von Kapitel C.7) ist metrisierbar
mit der Abstandsfunktion d ( x, y) = 1 für alle x 6= y.
Beispiel C.10.7. Jetzt können wir endlich q
die Standardtopologie auf R bzw Rn
Pn
2
angeben: Es ist die von d = | x − y| bzw. d =
i =1 ( x i − yi ) induzierte Topologie.
Für (R, d = | x − y|) sind die Bälle B( p, r ) gerade die offenen Intervalle ( p − r, p + r ).
Bemerkung C.10.8. Verschiedene Basen und damit Metriken können dieselbe
Topologie erzeugen. So erzeugen alle Metriken von Bsp. C.10.2 die Standardtopologie auf dem Rn , d.h., auch wenn der Abstandsbegriff verschieden sind, sind die
als offen angesehenen Mengen und damit die als stetig angesehenen Funktionen
usw. dieselben.
Verschiedene metrische Räume ( M, d (., .)) können denselben zugrundeliegenden topologischen Raum ( M, O ) haben.
Metrischen Räume erlauben die Einführung weiterer Konzepte, z.B. Beschränktheit und Vollständigkeit.
Definition C.10.9. Ein Unterraum U eines metrischen Raumes ( M, d ) heißt
beschränkt, wenn es ein D < ∞ gibt, so daß für alle x, y ∈ U gilt: d ( x, y) ≤ D .
Beschränktheit
Beschränktheit ist keine topologische Eigenschaft, sie hängt von der konkreten
Abstandsfunktion ab, siehe auch Bemerkung C.11.8.
Definition C.10.10. Eine Folge { x i } i∈N von Punkten eines metrischen Raumes
heißt Cauchy-Folge, wenn es zu jedem ² > 0 ein xn gibt, so daß alle nachfolgenden
xk , k > n im Ball B( xn , ²) liegen.
Definition C.10.11. Ein metrischer Raum heißt vollständig, wenn in ihm jede
Cauchy-Folge konvergiert.
Ein metrischer Raum ( M̂, d̂ ) heißt Vervollständigung von ( M, d ), falls (i) ( M̂, d̂ )
vollständig ist, (ii) M̂ dicht in M ist: [ M̂ ] = M und (iii) für alle Punkte x, y ∈ M
gilt d̂ ( x, y) = d ( x, y).
Cauchy-Folge
Vollständigkeit
Man kann zeigen, daß jeder metrische Raum eine Vervollständigung hat und
daß diese Vervollständigung bis auf Isometrie eindeutig ist.
Beispiel C.10.12. Die Vervollständigung von (Q, d = | x − y|) ist (R, | x − y|).
Definition C.10.13. Eine Abbildung f : M → N zwischen metrischen Räumen ist isometrisch, wenn sie Abstände erhält, also für alle x, y ∈ M gilt:
d N ( f ( x), f ( y)) = d M ( x, y).
Lemma C.10.14. Für alle isometrischen Abbildungen gilt:
(i) Isometrische Abbildungen sind stetig.
(ii) Isometrische Abbildungen sind injektiv.
131
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
isometrisch
Isometrie
(iii) Wenn eine isometrische Abbildung surjektiv (und damit bijektiv) ist, dann
ist die Umkehrabbildung auch isometrisch. Eine solche Abbildung heißt
Isometrie.4
(iv) Aus (ii) und (iii) folgt, daß jede isometrische Abbildung eine topologische Einbettung ist. Man nennt isometrische Abbildungen daher auch isometrische
Einbettungen.
Abschließend sei bemerkt, daß man in metrischen Räumen Stetigkeit, Konvergenz usw. auch definieren kann, indem man anstelle des topologischen Vokabulars
die δ-²-Sprache benutzt, z. B.:
Satz C.10.15. Eine Abbildung f : M → N zwischen metrischen Räumen ist stetig
im Sinne von Definition C.1.5 genau dann, wenn gilt: für alle x ∈ M und ² > 0 gibt
es ein δ > 0, so daß
f ( B( x, δ) ) ⊆ B( f ( x), ² )
(C.8)
C.11 Kompaktheit
Kompaktheit ist ein wichtiger Begriff in Topologie und Analysis. Die Definition
in der Sprache der offenen Mengen lautet bekanntlich: Ein topologischer Raum
ist kompakt, wenn jede Überdeckung des Raumes durch offenen Mengen eine
endliche Teilüberdeckung enthält.
Ich will kurz die äquivalente Definition in der Sprache der abgeschlossenen
Mengen angeben. (Der Äquivalenzbeweis ist nicht schwer.) Dazu brauchen wir
noch einen Begriff.
Definition C.11.1. Ein System {U i } i∈ I von abgeschlossenen Mengen heißt zentriert, wenn jede endliche Unterfamilie einen nichtleeren Durchschnitt hat: Für
T
alle J ⊂ I mit | J | < ∞ ist j∈ J U j 6= ;.
T
Diese Definition wirft die Frage auf: was kann man über den Durchschnitt i∈ I U i
der gesamten zentrierten Familie sagen? Wenn ich beliebige endlich viele U i auswähle, gibt es stets mindestens einen Punkt x, der in allen diesen U i enthalten ist.
Nun kann ich schrittweise beliebige weitere Uk zu meiner Auswahl hinzufügen –
und wieder wird es Punkte
T x geben, die in allen U’s meiner Auswahl liegen. Darf ich
daraus schließen, daß i∈ I U i garantiert auch nicht leer ist?
Definition C.11.2. Ein topologischer Raum ist kompakt genau dann, wenn jedes
zentrierte System abgeschlossener Teilmengen einen nichtleeren Durchschnitt
hat.
Beispiel C.11.3. Der Raum R ist nicht kompakt. Beweis: Seien Un die Intervalle
Un := [ n, ∞). Diese sind in der Standardtopologie von R abgeschlossen. Die Familie der Un ist zentriert: Sei J eine beliebige endliche Auswahl, d.h., Teilmenge
von N. Sei k das größte Element von J . Dann liegt k + 1 in allen ausgewählten U j ,
T
also in j∈ J U j . Der Durchschnitt aller U i ist jedoch leer: Für jedes x ∈ R kann
man ein Uk finden, das x nicht enthält: man wähle einfach k > x.
Wenn der Raum die zweite Abzählbarkeitseigenschaft hat, reicht es übrigens,
sich in obiger Definition auf abzählbare Mengensysteme I = N zu beschränken.
Satz C.11.4. Kompaktheit bleibt unter stetigen Abbildungen erhalten: Sei
f : M → N stetig und U ⊆ M kompakt. Dann ist f (U ) ⊆ N ein kompakter Teilraum
von N .
4 Manche Autoren verwenden anstelle des Begriffspaares isometrische Einbettung/Isometrie das
Begiffspaar Isometrie/isometrischer Isomorphismus zur Bezeichnung der injektiven/bijektiven
Abbildung.
132
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17
Beweis. Nach Satz C.3.4 sind die Urbilder abgeschlossener Mengen abgeschlossen.
Wenn also in f (U) ein zentriertes Mengensystem mit leerem Durchschnitt existierte, wäre sein Urbild unter f ebenfalls ein zentriertes Mengensystem mit leerem
Durchschnitt in U, im Widerspruch zur Kompaktheit von U.
Zwei Bemerkungen zu Kompaktheit in metrischen Räumen:
(I) Für sie fallen die Begriffe kompakt und folgenkompakt zusammen.
Satz C.11.5. Sei M ein metrisierbarer topologischer Raum. Dann ist M kompakt
genau dann, wenn jede unendliche Folge von Punkten in M eine konvergente
Teilfolge hat.
(II) In metrischen Räumen kann Kompaktheit etwas mit Beschränktheit zu tun
haben:
Definition C.11.6. Ein metrischer Raum ( M, d ) hat die Heine-Borel-Eigenschaft,
wenn gilt: Ein Unterraum U ⊆ M ist kompakt genau dann, wenn er beschränkt
und abgeschlossen ist.
Heine-Borel
Satz C.11.7 (Satz von Heine-Borel). Der Rn mit der Abstandsfunktion d 0 ( x, y) =
¡P n
¢
2 1/2
hat die Heine-Borel-Eigenschaft.
i =1 ( x i − yi )
d ( x,y)
Bemerkung C.11.8. Der Rn mit der Abstandsfunktion d 1 ( x, y) = 1+d0 0 ( x,y) hat die
Heine-Borel-Eigenschaft nicht. In ihm sind alle Untermengen beschränkt, da
d 1 ( x, y) nur Werte < 1 annimmt.
Die Abstandsfunktionen d 0 und d 1 erzeugen zwar dieselbe Topologie, und damit dieselben kompakten Untermengen, aber Beschränktheit ist, im Unterschied
zur Kompaktheit, keine topologische Eigenschaft.
Beispiel C.11.9. Zum Schluß noch eine Anwendung von Satz C.11.4 auf reellwertige Funktionen f : M → R. Sei U ein Kompaktum in M . Dann ist also f (U )
kompakt in R, nach dem Satz von Heine-Borel für (R, d = | x − y|) also beschränkt
und abgeschlossen. Daher gilt:
Satz C.11.10. Eine stetige reellwertige Funktion auf einem kompakten Raum
ist beschränkt und nimmt ihr Infimum und Supremum auch an, hat also ein
Maximum und ein Minimum.
C.12 Zusammenfassung
Wir haben in Kapitel B Mengen mit einer algebraischen Struktur versehen und in
Kapitel C mit einer topologischen Struktur. Mit einer solchen Struktur kann man
strukturerhaltende Abbildungen (Morphismen) zwischen den Objekten definieren.
Wenn zu einem Morphismus eine strukturerhaltende Umkehrabbildung existiert,
heißt er Isomorphismus. Hier ein paar Beispiele:
Objekte
Mengen
Gruppen
K-Vektorräume
topologische Räume
metrische Räume
glatte Mannigfaltigkeiten
Morphismen
Abbildungen
(Gruppen-)Homomorphismen
(K-) lineare Abbildungen
stetige Abbildungen
isometrische Einbettungen
glatte Abbildungen
Isomorphismen
Bijektionen
(Gruppen-)Isomorphismen
(K-lineare) Isomorphismen
Homöomorphismen
Isometrien
Diffeomorphismen
Tabelle C.1: Einige Kategorien aus Algebra und Topologie
133
M. Hellmund – preliminary version – 5. Dezember 2011 – 12:17