Aktives Elliptisches Filter 2. Ordnung mit Brücken-T-Glied
Werbung

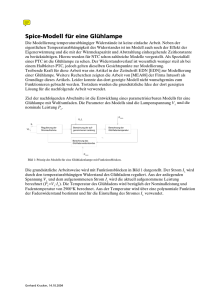
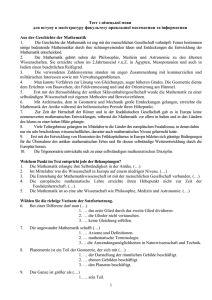
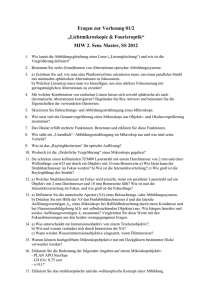
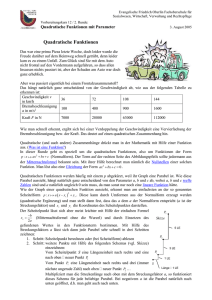
Aktives elliptisches TP-Glied zweiter Ordnung nach Boctor Das Tiefpassglied nach Boctor ist ein aktives elliptisches Grundglied zweiter Ordnung mit einem Operationsverstärker. Es erlaubt die einfache Realisation elliptischer und inverser Tschebyscheff-Filter basierend auf gegebenen Nullstellen-/ Polfrequenzen und Polgüten. Die Besonderheit ist die unabhängige Abgleichbarkeit der Vorgabegrössen. Gezeigt wird nachfolgend die Analyse und Herleitung der Dimensionierungsformeln mit Vorgabe der Kondensatoren. Beispiele zeigen die Realisationen konkreter Schaltungen. R2 C1 C8 R3 R4 u2 u1 R5 Bild 1: Elliptisches Tiefpass-Grundglied 2. Ordnung mit Brücken-T-Rückführung nach Boctor. R7 R6 Grundlagen Elliptische Grundglieder implementieren in der Tiefpass-Übertragungsfunktion neben den Polfrequenzen ωP und Polgüten QP auch endliche Nullstellenfrequenzen ωZ. Für die Nullstellengüte gilt per Definition QZ→∝. Am Beispiel der zweiten Ordnung wird dies: s 1+ G( s) = + s2 QZω Z ω Z s s2 1+ + 2 QPω P ω Z 1+ QZ →∞ = 1+ s2 ωZ s QPω P + (1) s2 ω Z2 Durch Einbringen endlicher Nullstellen wird eine grössere Flankensteilheit erreicht, jedoch auf Kosten der maximalen Sperrdämpfung. Die Nullstellen/ Polstellen und Polgüten werden durch Rechnung oder mit tabellierten Werten bestimmt. Diese Berechnungen werden nachfolgend als bekannt vorausgesetzt, da sie nicht Schwerpunkt dieses Artikels sind. Eine Auswahl an ein- und weiterführender Literatur zur Synthese der Pol-/Nullstellen ist [ZVE67], [ELL94] und [DAN74]. Direkt einsetzbare tabellierte Werte sind beispielsweise in [HER84] aufgeführt. Aktive Tiefpass-Schaltungen mit Implementierung endlicher Nullstellen sind in Analyse und Dimensionierung aufwändig. Dies wurde bereits in der Analyse des Tiefpasses nach Scultety [KRU02-1] aufgezeigt. Durch Zufügen zweier Widerstände im Brücken-T-Glied erhöht sich die Anzahl der wählbaren Parameter. Die Berechnung wird vereinfacht und ein unabhängiger Abgleich von ωP ,ωZ ,QP und QZ wird möglich. C1 R2 R3 u2 C8 R5 R6 Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 Bild 2: Grundschaltung Tiefpass 2. Ordnung nach Boctor. 1of 7 Übertragungsfunktion Mit Hilfe eines Knoten-/Maschenansatzes wird die Übertragungsfunktion bestimmt. Ein Beispiel zum Vorgehen ist in [KRU02-1] aufgeführt. Die Übertragungsfunktion wird für den allgemeinen Fall mit gegebenen Elementwerten: R R C ( R R + R2 R5 + R3 R5 ) + R2 R5C1 ( R3 R7 − R4 R6 ) 2 R2 R3 R5C1C8 1+ s 6 7 8 2 3 +s R7 ( R2 R3 + R2 R5 + R2 R6 + R3 R5 + R5 R6 ) R2 R3 + R2 R5 + R2 R6 + R3 R5 G( s) = A0 (2) C ( R R + R2 R5 + R3 R ) 2 1+ s 8 2 3 s R R C C + 2 3 1 8 R5 A0 = R7 ( R2 R3 + R2 R5 + R2 R6 + R3 R5 + R5 R6 ) (3) R5 R6 ( R4 + R7 ) Wenn sichergestellt ist, dass die Schaltung ein präzise dimensioniertes elliptisches oder TschebyscheffTyp 2-Filter ist, kann das lineare Glied im Zähler wegen QZ→∝ ohne Fehler weggelassen werden. Dimensionierungsgleichungen Aus der Übertragungsfunktion werden mit Koeffizientenvergleich die Dimensionierungsgleichungen hergeleitet. Ohne Rücksicht auf minimale Empfindlichkeiten ist es für die Praxis zweckmässig nach Möglichkeit die Kondensatorwerte vorzugeben. Eine einfache formale Lösung entsteht, wenn man R7,C1 und C8 und vorgibt. Die restlichen Grössen werden mit den Filterparameter ωP , ωZ , QP und A0≥1: D = C12ω Z4 − 4C1C8 A02ω P2 (ω P2 + QP2 ω Z2 ) R2 = R3 = R4 = R5 = R6 = A0 ≥ 1 (Hilfsgrösse) (4) C1ω Z2 − D 2C1C8 A0QP 2 A0QPω P C1ω − D 2 Z (5) = 1 C1C8 R2ω P2 (6) R7 (ω Z2 − A0ω P2 ) (7) ω A0 2 P C8 ( ( A0ω − ω 2 P 2 Z ( )( ( ) QP C1ω Z2 − D A0ω P ) C1ω − D + 2C8 A ω 2 Z ) −QP C1ω Z2 − D A0ω P ( 2 0 ) 2 P (ω + ω Q − ω Q 2 2 C1ω Z2 − D ω Z C1ω Z − D 2 C8 − + A0ω P 2C8 2C8 A0ω P2 Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 2 P = 2 Z 2 P 2 P 2 P )) = −QP R2 R C1C8QPω P2 + QP + R2C1ω P (8) 2 2 R7QP C8ω P ( R2 R4C1ω P − R7 ) (9) 2of 7 Kondensatorwerte Der Kondensatorwert C1 oder C8 wird durch Wahl vorgegeben. Der verbleibende Kondensator C8 oder C1 kann jedoch nicht frei gewählt werden. Aus der formalen Lösung für R5 in (8) können die Restriktionen abgeleitet werden: C8 < C1 ω Z4 QP2 ( A0 − 1) + ω Z2 ω P2 QP2 ( A0 − A02 ) + ω P2 A0 (ω Z2 − A0ω P2 ) ( A Q (ω − ω 2 0 2 P 2 Z 2 P ) +ω ) 2 P 2 (10) ( A0 ≥ 1) oder: C1 > ( C8 A02 QP2 (ω Z2 − ω P2 ) + ω P2 ) 2 (11) ω Z4 QP2 ( A0 − 1) + ω Z2 ω P2 QP2 ( A0 − A02 ) + ω P2 A0 (ω Z2 − A0ω P2 ) Für C1 ,C8 wird der nächst passende Normwert gewählt und als Vorgabe zur Rechnung in (4)..(9) benutzt. Bei steigender Polgüte und kleiner Verstärkung wird das Verhältnis C1/C8 sehr gross und für die Praxis ungünstig. Dadurch wird der Einsatzbereich dieser Schaltung auf QP<≈5 eingeschränkt. Für eine abgleichfreie Lösung sollten die Kondensatoren ausgemessen werden. Die gemessenen Werte bilden nachher die Grundlage zur Rechnung in (4)..(9). Die Praxis zeigt, dass bei handelsüblichen Kondensatoren mit grösseren Streuungen zu rechnen ist. Widerstände werden aus der E24-, oder besser, E96-Reihe eingesetzt. Die Kondensatoren sollten nach Möglichkeit so gewählt werden, dass schlussendlich alle Widerstände im Bereich 500Ω..500kΩ liegen. Pol-Nullstellenfrequenzen, Pol-Nullstellengüten Aus der Übertragungsfunktion (2), beschrieben mit den Elementwerten können durch Koeffizientenvergleich mit (1) direkt die Grössen ωP , ωZ , QP , QZ gefunden werden. ωP = QP = ωZ = QZ = 1 (12) R2 R3C1C8 R5 ω PC8 (R2 R3 + R2 R5 + R3 R5 ) (13) R2 R3 R5 R6C1C8 (R2 R3 + R2 R5 + R2 R6 + R3 R5 + R5 R6 ) (14) R2 R3 R5 R6C1C8 R7 (R2 R3 + R2 R5 + R2 R6 + R3 R5 + R5 R6 ) ω Z ( R3 R6 R7C8 ( R2 + R5 ) + R3 R5 R7 ( R2C1 + R3C8 ) − R2 R4 R5 R6C1 ) (15) Die Nullstellengüte QZ sollte im Idealfall nach Unendlich laufen. In der Praxis ist dieser Wert durchaus eine endliche Grösse und sollte berücksichtigt werden, wenn der Dämpfungspol eine Rolle spielt. Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 3of 7 Abgleich Das Boctor-Filter erlaubt einen unabhängigen Abgleich der Vorgabegrössen ωP,ωZ,QP und QZ→∝. Aus den Empfindlichkeiten kann die Abgleichvorschrift abgeleitet werden. Es gilt die Abgleichvorschrift nach [HER84]. R1 → ω P Für Abgleich R4 kurzschliessen R6 → QP R5 → ω Z (16) R3 → QZ Zusammenfassung Gezeigt wurde ein Formelsatz zur Dimensionierung und Analyse des Boctor-Tiefpasses 2. Ordnung nach Bild 1. Diese Schaltung erlaubt eine einfache Implementierung einer Tiefpassfunktion mit endlichen Nullstellen. Nachteilig ist die maximal erreichbare Polgüte QP<5 bei kleinen Anfangsverstärkungen. In diesen Fällen wird auch das Kapaziätsverhältnis C1/C8 sehr gross. Weiter werden recht hohe Anforderungen für das A0 und ωt des Operationsverstärkers gestellt. Für eine Abschätzung gilt vereinfacht nach [HER84] ca . fP<0.1fT (fT: Transitfrequenz des OpAmps). Die einfache und gut dimensionierbare Schaltung ist hingegen sicher als Vorteil zu werten. Sind höhere Polgüten zu realisieren wählt man zweckmässigerweise eine bessere Schaltung, z.B. aus der Gruppe der State-Variable-Filter. Beispiele Für direkten Vergleich werden von der Aufgabenstellung her dieselben Beispiele wie in [KRU02-1] gezeigt. Beispiel 1: TP-Übertragungsfunktion mit endlichen Nullstellen. Zu realisieren ist eine Tiefpassübertragungsfunktion 2. Ordnung nach (1) mit einem elliptischen Glied nach Bild 1 mit folgenden Vorgaben: ω P = 6283 Hz ω Z = 62830 Hz QP = 5 R8 = 10kΩ C2 = 1nF A0 = 2 Die Lösung soll mit einer PSpice-Simulation überprüft werden. Hierbei ist ein LM741 OpAmp zu verwenden. Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 4of 7 Lösung: Die Berechnung erfolgt direkt mit den Formeln. Die numerische Rechnung für die Elementwerte erfolgt hier mit MathCad. ORIGIN:= 0 Vorgaben: fC := 1kHz R7 := 10kΩ C1 := 120nF QP := 5 ω P := 6.612kHz C8 := 1nF ω Z := 65.07kHz A 0 := 2 Berechnungen: C8⋅ A 0 ⋅ QP ⋅ ω Z − ω P 2 C1min := 2 2 2 ( + ω P2 2 ) ω Z4⋅ QP2⋅ ( A 0 − 1) + ω Z2⋅ ω P2⋅ QP2⋅ A 0 − A 02 + ω P2⋅ A 0⋅ ω Z2 − A 0⋅ ω P2 −9 C1min = 100.012× 10 F D := C1 ⋅ ω Z − 4⋅ C1⋅ C8⋅ A 0 ⋅ ω P ⋅ ω P + QP ⋅ ω Z 2 4 2 2 2 2 2 R7⋅ ω Z − A 0⋅ ω P R4 := 2 2 2 4 5 D = 2.492692× 10 s A 4 2 4 kg m 3 R4 = 474.246× 10 Ω ω P ⋅A0 2 R2 := C1⋅ ω Z − D 3 R2 = 12.719× 10 Ω 3 2⋅ C1⋅ C8⋅ A 0⋅ QP⋅ ω P R3,R5,R6 werden mit den vereinfachten Formel berechtet, da R2 und R4 bekannt sind: R3 := R5 := R6 := 1 3 R3 = 14.986× 10 Ω 2 C1⋅ C8⋅ R2⋅ ω P −QP⋅ R2 3 2 2 QP + R2 ⋅ C1⋅ C8⋅ QP⋅ ω P − R2⋅ C1⋅ ω P ( R7⋅ QP ) C8⋅ ω P⋅ R2⋅ R4⋅ C1⋅ QP⋅ ω P − R7 R5 = 74.97 × 10 Ω 0 R6 = 316.139× 10 Ω Man erkennt in der Simulation deutlich die Abweichungen in der Polgüte (Soll: +20dB) und Nullstellenfrequenz. Dies ist durch den Operationsverstärker LM741 begründet. Durch Verwendung eines besseren Operationsverstärkers, z.B. LF411 kann das Resultat wesentlich verbessert werden. Bild 3: Amplitudengang und Schema der Lösung zu Beispiel 1. Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 5of 7 Beispiel 2: Inverser Tschebyscheff Tiefpass Zu realisieren ist ein inverser Tschebyscheff-Tiefpass 3. Ordnung mit den Anforderungen A0=3dB, fC=1kHz, AC=1dB, AH=40dB. Die wählbaren Komponenten sind mit R8=10kΩ und C2=4.7nF einzusetzen. Lösung Das Filter wird als Kaskade eines linearen und quadratischen Gliedes realisiert. Die normierten Pole/Nullstellen und Polgüte werden mit einer Tabelle, z.B. [HER84] S.262 oder [KRU02-2], bestimmt: n = 3: Ω P 1 = 1.3904 (lin.Glied) ΩZ 2 = 2.996 Ω P 2 = 1.26120 QP 2 = 1.10244 (Ellipt.TP 2.Ordnung ) Wir bestimmen zuerst mit einem möglichen für Wert C8 für das quadratische Glied aus der Vorgabe, Nachher werden die restlichen Elementwerte berechnet. Vorgaben: fC := 1kHz A 0dB := 3 R7 := 10kΩ C8 := 4.7nF Ω P1 := 1.3904 Ω P2 := 1.261 Ω Z2 := 2.996 QP2 := 1.10 Berechnungen ellipt. Glied : ω P := 2π ⋅ Ω P2⋅ fC 3 ω P = 7.923 × 10 Hz ω Z := 2π ⋅ Ω Z2⋅ fC 3 ω Z = 18.824× 10 Hz 0.05 ⋅A0dB 0 A 0 := 10 A 0 = 1.413 × 10 QP := QP2 C8⋅ A 0 ⋅ QP ⋅ ω Z − ω P 2 C1min := 2 2 2 ( 2 ) ω Z4⋅ QP2⋅ ( A 0 − 1) + ω Z2⋅ ω P2⋅ QP2⋅ A 0 − A 02 + ω P2⋅ A 0⋅ ω Z2 − A 0⋅ ω P2 −9 C1min = 23.043× 10 F C1 := 33nF D := C1 ⋅ ω Z − 4⋅ C1⋅ C8⋅ A 0 ⋅ ω P ⋅ ω P + QP ⋅ ω Z 4 2 2 2 R7⋅ ω Z − A 0⋅ ω P 2 R4 := + ω P2 2 2 2 2 (Wahl) 4 4 s A D = 98.427724 2 4 kg m 3 R4 = 29.963× 10 Ω 2 ω P ⋅A0 2 R2 := C1⋅ ω Z − D 3 R2 = 7.381 × 10 Ω 3 2⋅ C1⋅ C8⋅ A 0⋅ QP⋅ ω P R3,R5,R6 werden mit den vereinfachten Formel berechtet, da R2 und R4 bekannt sind: R3 := R5 := R6 := 1 3 R3 = 13.914× 10 Ω 2 C1⋅ C8⋅ R2⋅ ω P −QP⋅ R2 3 2 2 QP + R2 ⋅ C1⋅ C8⋅ QP⋅ ω P − R2⋅ C1⋅ ω P ( R7⋅ QP ) C8⋅ ω P⋅ R2⋅ R4⋅ C1⋅ QP⋅ ω P − R7 R5 = 33.425× 10 Ω 3 R6 = 5.508 × 10 Ω Berechnung lineares Glied: ω P := 2π ⋅ Ω P1⋅ fC C := C8 R := 1 ω P⋅ C 3 R = 24.355× 10 Ω Das lineare Glied wird mit der Vorgabe C=C8 gemäss Formelsammlung [KRU01] bestimmt. Es wird dem quadratischen Glied vorgeschaltet. Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 6of 7 Die Simulation bestätigt die Dimensionierung mit vernachlässigbar kleinen Abweichungen: Bild 4: Detailschema und Simulation der Lösung zum inversen TschebyscheffTiefpass 3. Ordnung nach Beispiel 2. Literatur [DAN74] Approximation Methods for Electronic Filter Design, R. Daniels, Mc Graw Hill 1974, ISBN0-07-01308-6 [ELL94] Electronic Filter Analysis and Design, Michael G. Ellis Sr., Artech House 1994 ISBN 0-890006-616-7 [HER84] Aktive RC-Filter, M. Herpy/ J. Berka, Franzis Verlag 1984, ISBN 3-7723-7011-X [SCH01] Design of Analog Filters, R. Schaumann/ M. E. van Valkenburg, Oxford University Press 2001, ISBN 0-19-511877-4 [KRU01] Formelsammlung aktive Filter, G. Krucker 1998-2001, Download von www.krucker.ch [KRU02-1] Aktives elliptisches Glied 2. Ordnung mit einem Operationsverstärker und Brücken-T-Mitkopplung, G. Krucker 2002, [KRU02-2] Inverse Tschebyscheff Tiefpassfilter, G. Krucker 2002, Download von www.krucker.ch [SCH01] Design of Analog Filters, R. Schaumann/ M. E. van Valkenburg, Oxford University Press 2001, ISBN 0-19-511877-4 [ZVE67] Handbook of Filter Synthesis, A. Zverev, John Wiley & Sons 1967, ISBN 0-461-98680-1 Gerhard Krucker, CH-3113 Rubigen, 17.12.2002 7of 7