Das Trägheitsmoment bei der Drehbewegung Bestimmung von J
Werbung

Protokoll zum Versuch M7:
Das Trägheitsmoment bei der Drehbewegung
Bestimmung von J experimentell und theoretisch
Jan Christoph M
Tobias F
Abgabedatum: 24. April 2007
INHALTSVERZEICHNIS
1
Inhaltsverzeichnis
1 Das Trägheitsmoment bei der Drehbewegung
1.1 Klärung des physikalischen Zusammenhangs . . . . . . . . . . . .
1.1.1 Gleichförmige und Gleichförmig Beschleunigte Bewegung
1.1.2 Gravitation und die Newtonschen Axiome . . . . . . . . .
1.1.3 Trägheitskräfte . . . . . . . . . . . . . . . . . . . . . . . .
1.1.4 Herleitung des Trägheitsmoments J über die Translation .
1.1.5 Translation und Rotation - Zusammenhänge . . . . . . . .
1.1.6 Der Steinersche Satz . . . . . . . . . . . . . . . . . . . . .
1.2 Versuchsaufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Durchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Messwerte und Angabe der Fehler . . . . . . . . . . . . . . . . .
1.5 Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Genauigkeit der Messung . . . . . . . . . . . . . . . . . .
1.5.2 Fehlerrechnung . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Theoretische Bestimmung von J . . . . . . . . . . . . . . . . . .
1.7 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
2
2
2
3
4
5
5
6
8
8
8
8
12
12
13
2 Literaturverzeichnis
2.1 Quellennachweis . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Bilder und Tabellen . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
13
13
3 Anhang
3.1 Diagramme in A4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
15
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
1
2
Das Trägheitsmoment bei der Drehbewegung
Das Trägheitsmoment ist eine physikalische Größe, der bei Drehbewegungen von
Körpern eine wesentliche Bedeutung zukommt. Es entspricht der Masse bei einer
geradlinigen Bewegung. Ähnlich schwer wie eine große Masse zu beschleunigen ist,
sind Körper mit großem Trägheitsmoment in Drehung zu versetzen.
1.1
Klärung des physikalischen Zusammenhangs
Als Grundlagen für den Versuch dienen die Prinzipien der gleichförmigen und der
beschleunigten Bewegung bei der Translation. Diese werden für den Versuch der
Drehbewegung auf die Rotation übertragen, da die Rotation in diesem Fall nichts
anderes ist als Translation auf der Kreisbahn.
Des weiteren werden die drei Newtonschen Axiome verwendet, um die Formel für
das Drehmoment J herzuleiten.
1.1.1
Gleichförmige und Gleichförmig Beschleunigte Bewegung
Um die Bewegung von Massepunkten zu verstehen, muss man Ort, Geschwindigkeit
und Beschleunigung in Beziehung zueinander setzen. Die Geschwindigkeit ~v ist die
Ortsänderung ~r˙ über einen Zeitraum ∆t → 0, also
~v (t) := lim
∆t→0
d~r
~r(t + ∆t) − ~r(t)
=
= ~r˙ .
∆t
dt
(1)
Nach demselben Prinzip ist die Beschleunigung ~a als Ableitung der Geschwindigkeit
~v˙ definiert:
~a(t) := lim
∆t→0
~v (t + ∆t) − ~v (t)
d~v
=
= ~v˙ .
∆t
dt
(2)
d2~r ¨
d~v
= ~v˙ =
= ~r .
dt
dt
(3)
Insgesamt gilt also
~a =
In unserem Fallexperiment haben wir es mit einer eindimensionalen Bewegung zu
tun, was eine Betrachtung der reinen Beträge der gemessenen Beschleunigungen
rechtfertigt.
Mit diesen Beziehungen ist es leicht, gleichförmige Bewegung als Bewegung mit
~v = const und gleichförmig beschleunigte Bewegung durch ~a = const zu definieren.
Legt man ein Bezugssystem zu Grunde, in welchem ~x(t = 0) = x0 = 0 und ~v (t =
0) = v0 = 0, so ergibt sich nach einfacher bzw. zweifacher Aufleitung von ~a für die
Geschwindigkeit ~v (t) = ~a · t und für den Ort ~x(t) = 21 ~a · t2 . [vp05]
1.1.2
Gravitation und die Newtonschen Axiome
Jeder Massepunkt hat ein radiales, konservatives Kraftfeld, welches bewirkt, dass
zwischen allen Massepaaren m, M eine anziehende Kraft wirkt.
Das grundsätzliche Verständnis erfordert nun den Begriff der Kraft. Am brauchbarsten sind die Newtonschen Axiome (nach Sir Isaac Newton, 1642-1727), welche
die Basisdefinition der Wirkung von Kräften liefern.
Das erste Axiom (Trägheitsprinzip) besagt, dass die Geschwindigkeit ~v eines Körpers
konstant ist, wenn die Summe aller Kräfte F~ gleich 0 ist. Das ist im theoretischen
Bild mit Massepunkten erst der Fall, wenn sämtliche Massen sich zu einer einzigen
vereint haben, da hier Massen keine Ausdehnung haben. Wenn wir allerdings das
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
3
Beispiel des freien Falls im Gravitationsfeld betrachten, sehen wir, dass, solange wir
die Verformung der Körper außer Acht lassen, dieses Kräftegleichgewicht (Equilibrium) eingetreten ist, wenn der sprichwörtliche Apfel die Erde berührt.
Nach dem zweiten Axiom sind Richtung der Kraft F~ und der Beschleunigung ~a
gleich, ihr Betrag proportional und der Betrag von Masse und Kraft ebenfalls proportional, experimental hat Newton ermittelt, dass jenes Verhältnis
F~ ∝ m · ~a
(4)
gilt. Dieses Axiom werden wir im Experiment für ein Massestück und dessen Erdanziehung nachweisen können. Im SI gilt dann sogar F~ = m · ~a.
Das dritte Axiom, auch Actio-Reactio-Prinzip genannt, sagt, dass die Kraft, welche
ein Massepunkt A auf den anderen Massepunkt B ausübt, auch von letzterem auf
ersteren Körper wirkt. Also gilt F~A→B = F~B→A . Dadurch erst tritt die Gravitation
zwischen Erde und den vielfach masseärmeren Körpern auf ihr ein.
1.1.3
Trägheitskräfte
Abb. 1: Rasante Kurvenfahrt [Sp05]
Trägheitskräfte sind die Folge von Beschleunigungen. Ihre Richtung ist der Beschleunigung entgegengesetzt. Man erkennt Trägheitskräfte nur in einem beschleunigten Bezugssystem; sie sind nur »Scheinkräfte«. Kräfte und Trägheitskräfte als
Ursache und Wirkung ein und derselben Beschleunigung sind stets gleich groß und
entgegengesetzt.
Jeder kennt das Beispiel einer scharfen Kurve oder starken Abbremsung beim Autofahren: Die Insassen fühlen sich beschleunigt, in Wirklichkeit werden sie aber nur
durch ihre Trägheit in einer Bewegung gehalten, die wegen der Zentripetal- bzw.
Bremsbeschleunigung des Wagens nicht mehr möglich ist. Darum rutschen sie im
Extremfall vom Sitz - wenn sie nicht angeschnallt sind (siehe Abb. 1).
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
1.1.4
4
Herleitung des Trägheitsmoments J über die Translation
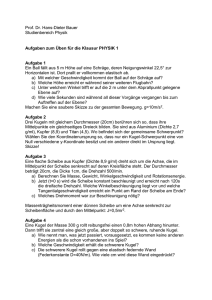
Abb. 2: Skizze zur Rotation [UU05]
Abb. 3: Skizze zur Bestimmung von J [UU05]
Man kann sich zunächst Abb. 2 anschauen, um die Situation zu erkennen.
Zunächst ergibt sich für die Winkelgeschwindigkeit analog zur Translation die Formel
˙
ω
~ = θ~
(5)
θ~ steht für den Drehwinkel. Des weiteren ergibt sich für die zeitliche Änderung der
Winkelgeschwindigkeit die Winkelbeschleunigung
¨
α
~ =ω
~˙ = θ~
(6)
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
5
Diese beiden Größen sind im allgemeinen Vektorgrößen. Da eine Kraft an einem äußeren Punkt angreifen muss, um die Scheiben in Bewegung zu setzten, betrachten
wir als nächstes die Tangentialgeschwindigkeit sowie die Tangentialbeschleunigung.
Erstere ergibt sich aus der Multiplikation der Winkelgeschwindigkeit mit dem Radius r.
~vt = r · ω
~
(7)
Des weiteren ergibt sich für die Tangentialbeschleunigung
~at = r · α
~
(8)
Zudem erfährt jeder Massepunkt zusätzlich noch eine Zentripetalbeschleunigung,
die sich durch
a~z = ~r · ω 2
(9)
darstellen lässt. Um nun auf das eigentliche Trägheitsmoment zu kommen, betrachten wir den Drehimpuls:
~ = p~ · ~r = m · v~t = m · r · ω
L
~
(10)
Aus der Kraft F~ = ~ṗ für die Rotation ergibt sich nun das Drehmoment als zeitliche
Ableitung des Drehimpulses:
~˙ = p~˙ · ~r = F~ × ~r
~ =L
D
(11)
Solange keine Kraft einwirkt, ist M = 0 und L = const. Das Trägheitsmoment
wirkt der durch das Drehmoment verursachten Beschleunigung entgegen. Aus dem
2. Newtonschen Axiom ergibt sich analog zu F~ = m · ~a
~
D
⇐⇒ J
= J ·α
~
~
D
=
α
~
(12)
(13)
~ sprechen wir in diesem speziellen Fall von D
~ = ~r × (m~g − m~a) (siehe Abb.
Für D
3), da das Drehmoment der Gewichtskraft entgegen wirkt. Also ergibt sich durch
Umformen und Einsetzten für das Trägheitsmoment J folgende Formel, wobei in
unserem Fall m~a zur Gewichtskraft m~g gleich gerichtet ist:
J=
1.1.5
r2 · m · (~g − ~a)
~a
(14)
Translation und Rotation - Zusammenhänge
Die Zusammenhänge zwischen den beiden Bewegungsvorgänge lassen sich sehr schön
wie in Tabelle 1 darstellen.
1.1.6
Der Steinersche Satz
Der Steinersche Satz liefert eine einfache Formel für die Berechnung des Trägheitsmoments eines Körpers um eine beliebige zur Schwerpunktachse parallele Achse
unter der Voraussetzung, dass das Trägheitsmoment des Körpers bei Drehung um
seinen Schwerpunkt bekannt ist. Die Herleitung ist einfach nachvollziehbar, wenn
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
Translation
Ortsvektor ~r
~v = ~r˙
Lage
Geschwindigkeit
~a = ~v˙ = ~¨r
m
1
2
2 mv
p~ = m~v
F~
p~˙ = F~
Beschleunigung
Masse
Kin. Energie
Impuls
Kraft
Bewegungsgleichung
6
Rotation
Drehachse & Drehwinkel θ~
˙
ω
~ = θ~
¨
α
~ =ω
~˙ = θ~
P
2
Trägheitsmoment J = mr0 i
1
2
2 Jω
~ = J~
Drehimpuls L
ω
~ = ~r × F~
Drehmoment D
~˙ = D
~
L
Tab. 1: Analogietabelle zur Translation und Rotation [Ge93]
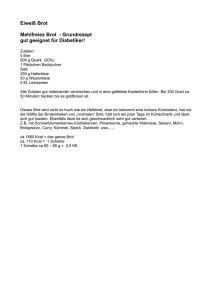
Abb. 4: Illustration zum steinerschen Satz [rwth05]
wir Abb. 4 betrachten.
Z
JA
2
r~i0 dm =
Z
~ 2 dm
(~
ri − d)
Z
Z
Z
~
2
~
=
ri dm − 2d · r~i dm + d~2 dm
| {z } |
{z
} | {z }
=
(1)
Z
=
(2)
r~i2 dm + M · d~2
= JS + M · d~2
(15)
(16)
(3)
(17)
(18)
Hier ist mit S die Schwerpunktachse bezeichnet, und A ist eine beliebige Parallele
dazu. A darf natürlich auch außerhalb des Körpers liegen, der Satz gilt dann immer
noch. (1) ist das ursprüngliche JS mit Drehachse S, (2) fällt bei S als Ursprung des
Systems weg und (3) ist das zusätzliche Trägheitsmoment, welches der rotierende
Körper durch die Achsenänderung d~ erhält.
1.2
Versuchsaufbau
Wie auf dem ersten Blick in Abb. 5 nicht zu erkennen ist, hängen die Scheiben alle
zusammen, das heißt, dass der ganze Apparat in eine Drehbewegung übergeht und
nicht nur eine einzelne Scheibe.
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
Abb. 5: Versuchsaufbau [PP05]
7
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
8
Bei diesem Versuch kann der Wert für J experimentell bestimmt werden. Es ergibt sich durch die obenstehende Gleichung für J die Möglichkeit, a mit Hilfe der
Messdaten zu bestimmen, indem man aus dem Diagramm die Steigung der Ausgleichsgerade abliest. Diese resultiert daraus, dass man die Fallhöhe s gegen die
gemessene Zeit t zum Quadrat aufträgt.
1.3
Durchführung
Bei diesem Versuch haben wir zunächst einmal eine Masse mit m = 200 g an die
kleinste der 3 Scheiben gehängt und dann die Fallzeiten zwischen den verschiedenen
Abständen von 10 cm bis 70 cm (in 10-cm-Schritten) gemessen und notiert. Danach
haben wir die selbe Prozedur für m = 100 g wiederholt.
Das selbe haben wir bei der mittleren Scheibe gemacht.
Bei der größten Scheibe haben wir jedoch das 50-Gramm- und 100-Gramm-Gewicht
genommen, da sonst die Fallzeit zu ungenau zu bestimmen gewesen wäre.
1.4
Messwerte und Angabe der Fehler
m/kg
Fallhöhe s/m
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Scheibe 2
0.200
Radius: 1.9cm
0.100
3.68
5.53
6.68
7.93
9.00
9.65
10.84
5.28
7.71
9.68
11.43
12.40
14.00
15.07
Scheibe 4 Radius: 2.9 cm
0.200
0.100
Fallzeit t/s
2.53
3.53
4.00
5.12
4.65
6.46
5.25
7.46
6.06
8.31
6.75
9.65
7.34
10.06
Scheibe 6
0.100
Radius: 3.9 cm
0.050
2.75
4.18
4.78
5.87
6.09
6.90
7.40
4.03
6.00
7.28
7.96
9.50
9.90
10.81
Tab. 2: Messwertetabelle M7, Abschrift des Originals
Radius/m
Höhe/m
Scheibe 1
0.022
0.002
Scheibe 2
0.019
0.027
Scheibe 3
0.032
0.002
Scheibe 4
0.029
0.027
Scheibe 5
0.042
0.002
Scheibe 6
0.039
0.027
Tab. 3: Messwertetabelle M7, Abschrift des Originals - Abmessungen des rotierenden
Körpers zur Volumenbestimmung
Die Messwerte ergaben sich genau wie in den Tabellen 2 und 3. Als Dichte des
g
Drehkörpers war ρ = 2.68 cm
3 angegeben.
1.5
Auswertung
Mittels Gleichung 14 können wir aus den experimentellen Werten J berechnen. Die
halbe Geradensteigung der Ausgleichsgeraden (siehe Diagramme im Anhang bzw.
oben) a2 haben wir mit Gnuplot berechnet (siehe Tab. 4).
1.5.1
Genauigkeit der Messung
Als Messgenauigkeiten bei Radius und Höhe der Teilzylinder des Rotationskörpers haben wir, da wir eine Schieblehre benutzten, jeweils ∆r = 0.05 mm und
Scheibe 7
0.042
0.008
Scheibe 8
0.200
0.009
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
Abb. 6: Messwerte von Scheibe 2, m = 200g
Abb. 7: Messwerte von Scheibe 2, m = 100g
9
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
Abb. 8: Messwerte von Scheibe 4, m = 200g
Abb. 9: Messwerte von Scheibe 4, m = 100g
10
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
Abb. 10: Messwerte von Scheibe 6, m = 100g
Abb. 11: Messwerte von Scheibe 6, m = 50g
11
1
DAS TRÄGHEITSMOMENT BEI DER DREHBEWEGUNG
g/ sm2
r/m
m/kg
a m
2 / s2
J/kg · m2
0.019
0.20
0.10
0.00622 0.00312
0.05688 0.05675
9.81 [tip04]
0.029
0.20
0.10
0.01334 0.00690
0.06174 0.05977
12
0.039
0.10
0.05
0.01266 0.00593
0.05884 0.06291
Tab. 4: Berechnung von J aus den Messwerten
∆h = 0.05mm bestimmt. Die Fallhöhe s hatte die Genauigkeit ∆s = 0.5mm, da
am Rand eine Millimeterskala angebracht war. Die Fallzeit konnten wir mit der
Stoppuhr zu einer Genauigkeit ∆t = 0.005s bestimmen, dies war die Genauigkeit
der digitalen Stoppuhr.
Vernachlässigen kann man die Dichteänderung wegen der Temperatur des Körpers.
Auch die Reibung des Körpers mit der Aufhängungsachse und die Luftreibung können wir nicht bestimmen. Der rotierende Körper war auch kein exakter Zylinder, er
hatte Bohrungen und die Aufhängung drehte sich nicht mit. Zuletzt haben wir uns
über die Masse des Fadens Gedanken gemacht, aber auch diese kann man wegen
seiner geringen Dichte vernachlässigen.
1.5.2
Fehlerrechnung
¯
Berechne zunächst den Mittelwert J:
1
(56.88 + 56.75 + 61.74 + 59.77 + 58.84 + 62.91)kg · m2 · 10−3
6
≈ 59.48kg · m2 · 10−3
J¯ =
Berechne nun die Streuung S der Ergebnisse (Formel siehe [PP05]):
v
u
n
u 1 X
S = t
(J¯ − Ji )2
n − 1 i=1
r
1
=
(6.76 + 7.45 + 5.11 + 0.08 + 0.41 + 11.76)kg · m2 · 10−3
5
≈ 2.51kg · m2 · 10−3
(19)
(20)
(21)
(22)
(23)
Jetzt können wir den Vertrauensbereich ∆J¯ für p = 0.95 berechnen. t entnehme ich
der Tabelle im Fehlerrechnungsskript [PP05]. Für m = 5 ist t = 2.6.
2.51
∆J¯ ≈ 2.6 · √ kg · m2 · 10−3
6
≈ 2.66kg · m2 · 10−3
(24)
(25)
Also liegt der Wert für J mit mehr als 95%iger Wahrscheinlichkeit bei 59(3)kg · m2 · 10−3 .
1.6
Theoretische Bestimmung von J
Aus der Physikvorlesung wissen wir, dass das Trägheitsmoment von Körpern kontinuierlicher Dichte schreiben können als
Z
J = r2 dm
(26)
wobei r der Abstand jedes Masseteilchens von der Drehachse ist. Die Formel für
das Trägheitsmoment eines Zylinders können wir nun zeigen über die Annäherung,
2
LITERATURVERZEICHNIS
Volumen/cm3
Masse/kg · 10−3
Radius/m
J/kg · m2 · 10−3
Scheibe 1
3.04
8.15
0.022
0.002
13
Sch. 2
30.62
82.06
0.019
0.015
Sch. 3
6.43
17.24
0.032
0.009
Sch. 4
71.34
191.18
0.029
0.080
Sch. 5
11.08
29.70
0.042
0.026
Sch. 6
129.02
345.76
0.039
0.263
Sch. 7
44.33
118.82
0.042
0.105
Tab. 5: Berechnung des Trägheitsmoments des Körpers anhand seiner Abmessungen
dass ein Zylinder eine Aneinanderreihung infinitesimaler Kreisscheiben ist. Eine
Kreisscheibe hat konstante Masseverteilung, wir nennen sie σ = M
A , wobei A die
Fläche der Scheibe sei. Die Fläche eines jeden Masseteilchens ist dA = 2πr dr, die
Masse jedes Teilchens ist
dm = σ dA =
M
2πr dr
A
(27)
Also gilt
Z
J
=
2
Z
r dm =
R
2
r σ2πr dr = 2πσ
0
=
Z
R
r3 dr
(28)
0
πM 4
1
2πM R4
=
R = M R2
2
A 4
2πR
2
(29)
Mit dieser Formel können wir die Trägheitsmomente der Teilscheiben des Körpers
aufsummieren und addieren und erhalten so das Trägheitsmoment J aus den Abmessungen des betrachteten Körpers (s. Tab. 5).
1.7
Zusammenfassung
Das Ergebnis der Fehlerrechnung überzeugt: Der in Tabelle 5 theoretisch berechnete
Wert liegt erwartungsgemäß im 95-prozentigen Vertrauensbereich für J.
Die beiden Ergebnisse bestätigen sich gegenseitig. Das spricht für die Qualität des
Versuchsaufbaus.
2
Literaturverzeichnis
2.1
Quellennachweis
Ge93: Gerthsen/Vogel: Physik, Springer-Lehrbuch 1993
PP05: Die Webseite des Phys. Praktikums der Universität Paderborn:
http://physik.uni-paderborn.de/studieninfos/praktika/pmp-a/
Sp05: Die Webseite der Zeitschrift »Der Spiegel«:
http://www.spiegel.de
Tip04: Tipler/Mosca: Physics for Scientists and Engineers EE, Freeman 2004
vp05: Schmidt/Sohler: Vorlesung Physik A der Uni Paderborn im WS 2005/06
UU05: Die Webseite der Physik der Universität Ulm:
http://wwwex.physik.uni-ulm.de/lehre/PhysIng1/node22.html
2.2
Bilder und Tabellen
Abbildungsverzeichnis
1
Rasante Kurvenfahrt [Sp05] . . . . . . . . . . . . . . . . . . . . . . .
3
Sch. 8
1130.97
3031.01
0.200
60.620
Σ
1426.84
3823.93
61.120
TABELLENVERZEICHNIS
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Skizze zur Rotation [UU05] . . . . . . . . .
Skizze zur Bestimmung von J [UU05] . . .
Illustration zum steinerschen Satz [rwth05]
Versuchsaufbau [PP05] . . . . . . . . . . . .
Messwerte von Scheibe 2, m = 200g . . . .
Messwerte von Scheibe 2, m = 100g . . . .
Messwerte von Scheibe 4, m = 200g . . . .
Messwerte von Scheibe 4, m = 100g . . . .
Messwerte von Scheibe 6, m = 100g . . . .
Messwerte von Scheibe 6, m = 50g . . . . .
Messwerte von Scheibe 2, m = 200g . . . .
Messwerte von Scheibe 2, m = 100g . . . .
Messwerte von Scheibe 4, m = 200g . . . .
Messwerte von Scheibe 4, m = 100g . . . .
Messwerte von Scheibe 6, m = 100g . . . .
Messwerte von Scheibe 6, m = 50g . . . . .
14
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
4
6
7
9
9
10
10
11
11
16
17
18
19
20
21
Analogietabelle zur Translation und Rotation [Ge93] . . . . . . . . .
Messwertetabelle M7, Abschrift des Originals . . . . . . . . . . . . .
Messwertetabelle M7, Abschrift des Originals - Abmessungen des rotierenden Körpers zur Volumenbestimmung . . . . . . . . . . . . . .
Berechnung von J aus den Messwerten . . . . . . . . . . . . . . . . .
Berechnung des Trägheitsmoments des Körpers anhand seiner Abmessungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
8
Tabellenverzeichnis
1
2
3
4
5
8
12
13
3
ANHANG
3
3.1
Anhang
Diagramme in A4
15
3
ANHANG
16
Abb. 12: Messwerte von Scheibe 2, m = 200g
3
ANHANG
17
Abb. 13: Messwerte von Scheibe 2, m = 100g
3
ANHANG
18
Abb. 14: Messwerte von Scheibe 4, m = 200g
3
ANHANG
19
Abb. 15: Messwerte von Scheibe 4, m = 100g
3
ANHANG
20
Abb. 16: Messwerte von Scheibe 6, m = 100g
3
ANHANG
21
Abb. 17: Messwerte von Scheibe 6, m = 50g