Elektrische Antriebstechnik
Werbung

Elektrische Antriebstechnik
Seite 1/108
Elektrische Antriebstechnik
1.
1.1.
1.2.
1.3.
1.4.
1.5.
1.6.
2.
2.1.
2.2.
2.3.
2.4.
2.5.
2.6.
2.7.
3.
3.1.
3.2.
3.3.
3.4.
3.5.
3.6.
3.7.
4.
4.2.
5.
5.1.
5.2.
5.3.
5.4.
6.
6.1.
6.2.
Antriebsdimensionierung ........ 2
Statische Antriebsauslegung ...... 2
Dynamische Antriebsauslegung . 5
Positionierung ............................. 9
Beispiel Fahrzeugkräfte .............. 10
Übungen zur Antriebsauslegung 12
Übung Hubgetriebe .................... 12
Magnetismus............................. 13
Grundgrössen Magnetismus....... 13
Lorentzkraft................................. 17
Permanentmagnete .................... 18
Maxwellkraft (Magnetfeld auf
Eisen) ......................................... 20
Drehmoment in einem Motor ...... 21
Formeln zum Magnetismus ........ 23
Übungen zum Magnetismus ....... 24
Kommutatormaschinen............ 25
Grundgleichungen ...................... 26
Wicklungen von
Gleichstrommaschinen ............... 28
Schaltungen der
Gleichstrommaschine ................. 31
Leistungen der
Gleichstrommaschine ................. 34
Regelung von
Gleichstrommaschinen ............... 36
Datenblatt einer
Gleichstrommaschine ................. 37
Übung Kommutatormaschine ..... 38
Leistungselektronik .................. 41
Zusammenstellung
Gleichrichterschaltungen ............ 43
Transformator ........................... 48
Induktion ..................................... 49
Eisenverluste .............................. 50
Dimensionierung von
Transformatoren ......................... 51
Messungen an Transformatoren . 55
Synchronmaschinen ................ 58
Synchronmaschine als
Servoantrieb ............................... 58
Drehstrom ................................... 60
6.3.
6.4.
7.
7.1.
Synchrongeneratoren ................. 65
Übung Synchronmaschine .......... 67
Asynchronmaschinen .............. 69
Typenschild eines
Asynchronmotors ........................ 70
7.2. Grundgleichungen....................... 71
7.3. Drehmomentberechung der
ASM ............................................ 80
7.4. Luftspaltleistung .......................... 82
7.5. Datenblatt ................................... 85
7.6. Nennwirkungsgrade .................... 91
7.7. Übung Asynchronmaschine ........ 93
8.
Reluktanzmaschinen ................ 94
9.
Motorentechnik ......................... 96
9.1. Aufbau von Elektromotoren ........ 96
9.2. Technische Ausführung von
Motoren....................................... 96
9.3. Thermische Antriebsauslegung .. 97
9.4. Zuverlässigkeit ............................ 98
10.
Sondermaschinen ..................... 100
10.1. Unipolarmaschine ....................... 100
10.2. Gleichstrommaschine mit
eisenlosen Anker ........................ 100
10.3. Scheibenläufer ............................ 101
10.4. Integralmotor ............................... 101
10.5. Reluktanzmotor ........................... 102
10.6. Asynchronmotor mit
Permanentmagneten .................. 102
10.7. Spaltpolmotor .............................. 102
10.8. Bürstenloser Gleichstrommotor .. 103
10.9. Schleifringloser
Synchrongenerator ..................... 103
10.10. Stromrichtermotor ....................... 103
10.11. Schrittmotor ................................ 104
10.12. Switched Reluctance Drive ......... 105
10.13. Magnetmotor ............................... 105
10.14. Transversalflussmaschine .......... 105
10.15. Linearantrieb ............................... 106
10.16. Akuratoren .................................. 107
10.17. Piezomotor .................................. 107
11.
Zusammenfassung ................... 108
Zusammenzug aus http://www.energie.ch
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
1.
Seite 2/108
Antriebsdimensionierung
Bei der Dimensionierung eines Antriebsystems geht es darum, einen Antrieb zu
finden, welcher eine Last im gewünschten Bereich betreiben kann. Damit ein Antrieb
eine Last bewegen kann, muss er mehr Kraft (Drehmoment) als sie haben. Wenn er
weniger hat, dann bewegt die Last den Antrieb oder das System bleibt im Stillstand
(siehe Anlauf). Wenn beide Kräfte (Drehmomente) gleich gross sind, befindet sich
das System im Betriebspunkt. Dieser Betriebspunkt kann genau dem Nennpunkt
(Nenndrehzahl, Nenndrehmoment, Nennleistung) des Antriebes entsprechen, das
wäre aber Zufall. Wenn der Antrieb für längere Zeit mehr Drehmoment abgeben
muss, als er darf, wird er zu heiss und kann ausfallen. Dieses Thema wird im Kapitel
"Thermische Antriebsauslegung" behandelt. Die Bestimmung der Lastmomente wird
im Kapitel "Statische Antriebsauslegung" behandelt. Wenn die Bewegung in einer
bestimmten Zeit erfolgen soll, ist zusätzlich die Masse (Schwungmasse) der
beteiligten Systeme bei der Antriebsauslegung zu berücksichtigen. Dieses Thema
wird im Kapitel "Dynamischen Antriebsauslegung" behandelt, welches auch die
Transformation durch Getriebe und Umlenksysteme (Zahnstange, Riemen, Spindeln
...) beinhaltet. Im Kapitel "Positionierung" werden zusätzlich standardisierte
Bewegungsabläufe aufgeführt.
Ein Antrieb beschleunigt eine Last solange, bis sein Drehmoment gleichgross wie
das der Last ist.
1.1. Statische Antriebsauslegung
Bei Arbeitsmaschinen mit langsamen Drehzahländerungen genügt meistens eine
statische Antriebsauslegung. Es gilt die Bedingung, dass über den ganzen
Drehzahlbereich das Lastmoment nicht grösser als das Antriebsmoment sein darf.
Die Berechnung der Beschleunigung, der Einbezug von Getrieben und
Umlenkeinrichtungen wir bei der dynamischen Antriebsaulegung behandelt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
1.1.1.
Seite 3/108
Lastkennlinien
Die Grundlage einer statischen Antriebsauslegung ist die Drehmoment-Drehzahlkennlinie der anzutreibenden Last. Man unterscheidet zwischen:
1.
hyperbolischen
Lastmomenten,
konstante
Leistung
(spanabhebende
Bearbeitung wie Bohren, Fräsen, Drehen und Zentrumswickler)
2.
konstanten Lastmomenten (Kran, Gleitreibung)
3.
linearen Lastmomenten (laminare Strömung, hydrodynamische Lager ...)
4.
quadratischen Lastmomenten (turbulente Strömung zum Beispiel bei Lüfter und
Pumpen)
5.
beliebigen, prozessspezifischen Lastmomenten
Drehmoment-Drehzahl-Kennlinien verschiedener Prozesse mit einer Leistung von
etwa 1 kW bei 1000 U/min.
1.1.2.
Bestimmung der Lastmomente
Die Bestimmung der Lastmomente kann in der Praxis recht aufwendig werden, ist
aber für eine seriöse Antriebsauslegung notwendig. Die Vorgehensweise wird im
folgenden stichwortartig beschrieben:
Berechung der Prozesskräfte: Rechenmodell (siehe Beispiel Fahrzeugkräfte),
Grundlagen aus Literatur (Dubbel, Papers ...); Computersimulation, Graphische
Auswertung, Abschätzung und Vergleich aus bekannten ähnlichen Prozessen
Messung der Kräfte und Bewegungen: Kraft- und Drehmomentmessgeräte (Messung
der Gegenkraft), Bewegungsanalyse mit Videokamera (Kinematik), Messung mit
Waage, Drehmoment = Kraft mal Hebellänge
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 4/108
Messung
über
Motor
an
bestehender
Maschine:
Kalibrierung
mit
Drehmomentmessung,
Aufzeichnung
des
drehmomentbildenden
Stromes,
Rückrechnung zum Prozess Losbrechmoment
1.1.3.
Anlauf
Ein spezieller Fall ist das erforderliche Drehmoment und eine vom Stillstand in
Bewegung zu versetzen. Wenn das Losbrechmoment (die Haftreibung) kleiner als
das Anzugsdrehmoment ist, sind keine Anlaufschwierigkeiten zu erwarten.
Ein hohes Losbrechmoment kann einen anzugsschwachen Motor blockieren.
Bei hohen Haftmomenten im Bereich des Motoranlaufmomentes nützt bei
Asynchronmotoren ein Sanftanlaufgerät nicht viel, denn der Motor beschleunigt erst,
wenn er genug Spannung hat, um das Losbrechmoment zu überwinden. Mit einem
modernen Frequenzumrichter steht aber schon beim Start ein hohes Drehmoment
zur Verfügung.
Ein Asynchronmotor, der direkt oder mit einem Softstarter ans Netz geschaltet wird,
erhitzt sich beim Hochfahren mit der Energie, welche der Rotationsenergie des
Rotors und der Last entspricht. In den Datenblättern von Standardmotoren ist die
zulässige
Anzahl
Leerumschaltungen
pro
Stunde
angegeben.
Kleine
Asynchronmotoren können viel mehr Schaltungen (einige pro Sekunde) als grosse
(einige pro Stunde) verkraften. Beim Betrieb mit einem Frequenzumrichter hat der
Motor einen beschränkten Schlupf und kann viel häufiger geschaltet werden.
Wenn das Lastdrehmoment unterhalb der Nenndrehzahl grösser als das
Nenndrehmoment des Motors ist (Zentrumswickler, Knetmaschinen, Exzenter ...), so
ist ein Antriebssystem mit einer Kennlinie zu suchen, welches diesen Bereich
abdeckt (Gleichstrom-Reihenschluss-Motor, fremderregter Gleichstrom-Motor mit
Feldschwächung, Asynchronmotor mit Frequenzumrichter in der Feldschwächung,
geschalteter Reluktanzmotor). Als Alternative bleibt eine veränderbare
Getriebeuntersetzung oder eine entsprechende Überdimensionierung des
Antriebssystems.
Der Preis eines Motors hängt von seiner Grösse und somit vom Nenndrehmoment
ab. Die Drehmomentanpassung an die Last ist mit einem Getriebe meistens
günstiger als mit einem grossen Motor. Ein Getriebe hat ein Reibungsmoment,
welches von der übertragenen Leistung wenig abhängig ist. Der Wirkungsgrad eines
Motors oder eines Getriebes bezieht sich auf die Nennleistung. Im Teillastbereich
oder bei tieferen Drehzahlen ist der Wirkungsgrad schlechter.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
1.1.4.
Seite 5/108
Leistung
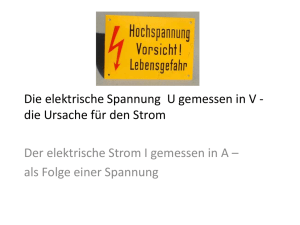
Die Leistung rechnet sich aus Drehmoment mal Drehzahl: P = M Ω [W]. Dabei ist zu
beachten, dass für die Drehzahl nicht die übliche technische Grösse n [U/min]
sondern die Grösse Ω [rad/s] benutzt wird. Für die Umrechnung gilt: 1 rad/s = 60
s/min / 2π rad/U = 9,55 U/min. Die üblicherweise verwendete Einheit für die Drehzahl
n [U/min] ist etwa 10 mal grösser als die Grösse Ω [rad/s].
Ein Motor gibt nur seine Nennleistung ab, wenn die Last genau diese erfordert.
Praktisch ist es unwahrscheinlich dass in einer Anwendung der Motor mit seiner
Nennleistung belastet wird. Meistens ist das Lastmoment tiefer als das Nennmoment
des Motors. Wenn einem Motor über längere Zeit mehr Drehmoment abverlangt wird,
als er dauernd abgeben kann, wird er zu warm und kann ausfallen.
1.2. Dynamische Antriebsauslegung
Als Ergänzung zu den Anforderungen bei der statischen Antriebsauslegung muss bei
der dynamischen Antriebsauslegung eine bestimmte Drehzahl oder Position in einer
vorgegebenen Zeit erreicht werden. Für die dazu notwendige Beschleunigung (oder
Verzögerung) muss das Antriebssystem ein zusätzliches Drehmoment aufbringen. Je
grösser die Beschleunigung ist, desto mehr Kraft ist erforderlich. In vielen
dynamischen Maschinen braucht der Motor die meiste Kraft, um seinen eigenen
Rotor zu beschleunigen.
1.2.1.
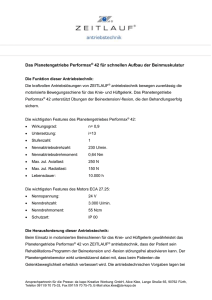
Translation: lineares System
Das translatorische System bezieht sich auf geradlinige (lineare) Bewegungen, wie
sie Schlitten, Aufzüge, Kolben und andere Teile von Maschinen und Anlagen
ausführen.
Die translatorische Bewegung.
Die Grundeinheiten für das translatorische System sind der Weg s [m], die Zeit t [s]
und die Masse m [kg]. Die Beschleunigungskraft ist F = d(v m)/dt [N (Newton) = kg
m/s²]. Für nicht veränderliche Massen, ist die Beschleunigungskraft das Produkt aus
Masse mal Beschleunigung: F = a m.
Die Geschwindigkeit ist Weg durch Zeit: v = ds/dt [m/s], die Beschleunigung ist
Geschwindigkeit durch Beschleunigungszeit: a = dv/dt [m/s²]. Im freien Fall mit einer
Beschleunigung von etwa 10 m/s² nimmt die Geschwindigkeit pro Sekunde um 10
m/s (36 km/h) zu. Für die Beschreibung höherwertiger Bewegungsverläufe gibt es
noch die Ableitung der Beschleunigung mit der Bezeichnung "Ruck": j = da/dt [m/s³].
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Im Kapitel Positionierung sind optimale Bewegungsabläufe
Geschwindigkeit, Beschleunigung und Leistung dargestellt.
1.2.2.
Seite 6/108
für
minimale
Rotation: drehendes System
Das rotative System bezieht sich auf Drehbewegungen wie sie in rotierenden
elektrischen Maschinen, Getrieben, Walzen, Spindeln und Teilen von Maschinen und
Anlagen vorkommen.
Die rotierende Bewegung.
Die beste Einheit für den Winkel ist rad (Radiant), 1 rad = 1 Umdrehung / 2π (0,16
Umdrehungen oder 57,3 Grad) ist ungewohnt. Radiant ist eine dimensionslose
Grösse, damit aber in der Rechnung das Bezugssystem deklariert wird, ist es
nützlich die Einheit rad zu benutzen. Durch die Verwendung dieser Grösse können
die Umrechnungsfaktoren bei der Berechnung weggelassen werden. Die
Grundeinheiten für ein rotatives System sind der Winkel φ [rad], daraus lassen sich
die Winkelgeschwindigkeit (Drehzahl) Ω = dφ/dt [rad/s], die Winkelbeschleunigung α
= dΩ/dt [rad/s²], der Winkelruck σ = dα/dt [rad/s³] ableiten. Im rotativen System gibt
es noch das Beschleunigungsmoment M [Nm] und die Schwungmasse (polares
Massenträgheitsmoment) J [kgm²]. Bei der dynamischen Auslegung von Gelenken,
Kurbeltrieben und ähnlichen Systemen ist bei der Berechnung der
Beschleunigungsmomente die ausführliche Formel zu verwenden. Durch den
veränderlichen Radius für die Bewegungsübertragung vom linearen ins rotative
System verändert sich die transformierte Schwungmasse mit dem Winkel und der
Zeit: M = d(J Ω)/dt = α J + Ω dJ/dt. oder bei konstanter Schwungmasse vereinfacht M
= α J.
1.2.3.
Schwungmasse und Getriebe
Das polare Massenträgheitsmoment (Schwungmasse) eines Körpers nimmt
quadratisch mit dem Abstand der Masse vom Rotationszentrum zu: J = ∫ r² dm. Bei
einem Vollzylinder rechnet sich die Schwungmasse J [kgm²] aus dem Radius r [m]
der Länge l [m], der Masse m [kg] und diese aus den Abmessungen und dem
homogenem spezifischem Gewicht ρ [kg/m³] nach der Formel: J = ½ m r 2 = ½ ρ π l r
4. Die Schwungmasse eines Vollzylinder nimmt mit der vierten Potenz des
Durchmessers zu. Ein um 20% dickerer Zylinder hat die doppelte Schwungmasse.
Wenn zwei rotierende Körper über ein Getriebe miteinander verbunden sind, so wird
die Schwungmasse mit dem Quadrat des Übersetzungsverhältnisses i [-]
transformiert. Eine optimale Anpassung ist gefunden, wenn die transformierte träge
Masse der Last gleich gross ist, wie die des Motors.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 7/108
Riemengetriebe mit Übersetzung i = Ø2/Ø1.
Grösse
Antrieb Last
Winkel
φ1
= φ2 i
Winkelgeschwindigkeit (Drehzahl) Ω1
= Ω2 i
Winkelbeschleunigung
α1
= α2 i
Winkelruck
σ1
= σ2 i
Drehmoment
M1
= M2 / i
Schwungmasse (resultierend)
J1res = J1 + J2 / i²
Leistung
P1
= P2
Transformation von Winkel, Drehzahl, Winkelbeschleunigung, Drehmoment und
Schwungmasse durch ein Getriebe mit der Untersetzung i.
1.2.4.
Transformation: Umwandlung Translation in Rotation
Die Umwandlung einer rotativen in eine translatorische Bewegung kann auf
verschiedene Arten erfolgen: Kette, Zahnriemen, Seilzug, Zahnstange, Spindel, usw.
Bei diesen Transformationen kann ein Rechnungsradius r [m] als Umrechnungswert
angenommen werden. Bei den Übertragungselementen mit einer Abwicklung über
den Umfang entspricht dieser Radius dem geometrischen Wert. Bei einer Spindel ist
der Rechnungsradius die Spindelsteigung sp [m]: r' = sp / 2π. Bei der Formel für die
resultierende Schwungmasse J1res [kgm²] bezogen auf die Seiltrommel ist zu
beachten, dass die Masse m [kg] über den Seilzug direkt am Umfang der
Seiltrommel angreift. Dadurch entfällt der Faktor ½, welcher bei der Berechnung der
Schwungmasse bei einem Vollzylinder verwendet wird. Dort ist die Masse über das
ganze Volumen gleichmässig verteilt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 8/108
Ein Schlitten wird mit einem Seil über eine Seiltrommel mit dem Radius r gezogen.
Grösse
Rotation
Winkel
φ
=
Winkelgeschwindigkeit (Drehzahl) Ω
=
Winkelbeschleunigung
α
=
Winkelruck
σ
=
Drehmoment
M
=
Schwungmasse (resultierend)
Jres
=
Translation
s/r
v/r
a/r
j/r
Fr
J + m r²
Transformation mit dem "Rechnungsradius" r.
1.2.5.
Energie und Leistung
Die Energie ist das Integral der Leistung über die Zeit. Für die Berechnung der
Hochlaufzeit bei einer Beschleunigung mit konstanter Leistung (Feldschwächbereich
einer Asynchronmaschine) kann über die Differenz der kinetischen Energie
berechnet werden. Mit einer Kontrollrechnung über die Energie oder Leistung kann
auch die Rechnung bei verknüpften Systemen (Getriebe, Zahnriemen ...) überprüft
werden, indem jedes System einzeln gezählt wird.
Grösse
Symbol Einheit Translation Rotation
Leistung
P
W
Fv
MΩ
Energie
W
J = Ws ∫ P dt
∫ P dt
Energie (statisch)
W
J
∫ F ds
∫ M dφ
Energie (Kraft/Moment konstant) W
J
Fs
Mφ
Energie (kinetisch)
W
J
½ m v²
½ J Ω²
Energie (potentiell)
W
J
mgh
Erdbeschleunigung
g
m/s² 9,81
Höhenunterschied
h
m
Leistung und Energie im translatorischen und rotativen System.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 9/108
1.3. Positionierung
Unter Positionierung versteht man die Verschiebung einer Masse um eine Strecke in
einer bestimmten Zeit: s = ∫ v(t) dt. Zu Beginn und am Ende der Positionierung muss
die Masse stillstehen, das heisst die Geschwindigkeit ist 0. Der Bewegungsverlauf
kann beliebig erfolgen, für die Positionierung von Massen gibt es aber 3
Extremlösungen: Minimale Geschwindigkeit, minimale Beschleunigung (Kraft) und
minimales Leistungsmaximum.
Minimale
Minimale
Minimale
Geschwindigkeit Beschleunigung Leistung
Beschleunigungszeit
0
tp / 2
tp / 3
Maximale Geschwindigkeit s / tp
2 s / tp
1,5 s / tp
Beschleunigung
∞
4 s / tp ²
4,5 s / tp ²
Maximale Leistung
∞
8 m s ² / tp ³
6,75 m s ² / tp ³
Grösse
Zusammenstellung der Formeln für die 3 Extremlösungen.
Bei der Masse (Schwungmasse) ist die gesamte bewegte Masse (Last, Getriebe,
Antrieb) zu berücksichtigen. Bei genauen Positionieraufgaben sollte die berechnete
Positionierzeit etwas kürzer sein, als die zur Verfügung stehende Zeit, da das
System noch ausschwingt. Eine weiterer Parameter ist dann die Berücksichtigung
des Rucks (Veränderung der Beschleunigung). Bei zeitkritischen Anwendungen wird
meistens die Bewegungsform mit minimaler Beschleunigung (die halbe Zeit
"Vollgas", die andere Hälfte "Vollbremsung") gewählt. Wenn die Last (z.B. Reibung,
Gewichtskraft ...) nicht zu vernachlässigen ist, sollte diese Kraft berücksichtigt
werden, indem zum Beispiel für die Beschleunigung mehr Zeit zur Verfügung steht,
weil die Reibung beim Bremsen hilft.
Translatorisch Rotativ
Symbol Einheit Symbol Einheit
Positionierzeit
tp
s
tp
s
Strecke (Winkel)
s
m
φ
rad
Geschwindigkeit (Winkelgeschwindigkeit) v
m/s
Ω
rad/s
Beschleunigung (Winkelbeschleungiung) a
m/s² α
rad/s²
Masse (Schwungmasse)
m
kg
J
kgm²
Maximale Leistung
P
W
P
W
Grösse (rotativ)
Zusammenstellung der verwendeten Grössen.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
1.3.1.
Seite 10/108
Diagramme
Für die Positionierung über eine Strecke s von 2 Meter innerhalb tp von 2 Sekunden
ergeben sich folgende 3 Extremlösungen:
Positionierung
mit
minimaler Positionierung
Geschwindigkeit,
real
ist
die Beschleunigung
Optimierung.
Beschleunigungszeit sehr kurz
Positionierung
Spitzenleistung.
mit
mit
(Kraft),
minimaler
übliche
minimaler
1.4. Beispiel Fahrzeugkräfte
Für die Bewegung eines Fahrzeug greifen im wesentlichen folgende 4 Kräfte an:
Kräfte
Grundfunktion
Vereinfachung
Rollreibungskraft
Strömungswiderstandskraft
Steigungskraft
Beschleunigungskraft
Fr = cr m g cosφ
Fw = cw A ½ ρ (v w)²
Fs = m g sinφ
Fr = cr m g
Fw = cw A ½ ρ
v²
Fs = m g s
Fa = (m + mz) a
Fa = 0
Bemerkungen zur
Vereinfachung
bis zu etwa 20% Steigung
ohne Gegenwind w
bis zu etwa 20% Steigung
Beschleunigungskraft ist
Differenz zur Antriebskraft
Die resultierende Kraft ist die Summe dieser Kräfte F = Fr + Fw + Fs + Fa, wobei die
letzen beiden Kräfte auch negativ wirken können.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 11/108
Die verwendeten Grössen sind:
Grösse
Kraft in Fahrtrichtung
Rollreibungswert
Masse (Gewicht)
Zusatzmasse (transformierte
Schwungmassen)
Erdbeschleunigung
Steigungswinkel
Strömungsbeiwert
Spantfläche (Querschnitt)
Spezifisches Gewicht Luft
Fahrzeuggeschwindigkeit
Windgeschwindigkeit in
Fahrtrichtung
Steigung
Beschleunigung
Symbol
F
cr
m
Einheit
N
kg
Wertebereich für ein Personenwagen
-10 bis 10 kN
0,005 bis 0,050 (im Gelände grösser)
500 bis 2500 kg
mz
kg
5 bis 30% der Fahrzeugmasse
g
φ
cw
A
ρ
v
m/s²
m²
kg/m³
m/s
9,81 m/s²
-0,3 bis 0,3 rad (17° Winkelgrad)
0,2 bis 0,6
1,5 bis 4 m²
1,1 bis 1,3 kg/m³
-10 bis 70 m/s (-40 bis 250 km/h)
w
m/s
-50 bis 50 m/s
s
a
m/s²
-0,3 bis 0,3 (s = tgφ)
-10 bis 6 m/s²
Die erforderliche Leistung ergibt sich aus der Summe der Kräfte mal die
Geschwindigkeit: P = F v.
Die dargestellte Lastkennlinien eines Fahrzeuges gelten für eine Gewicht von 1000
kg, einem Rollreibungswert von 0,015, einem Strömungsbeiwert von 0,45 und einer
Spantfläche von 2 m²
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 12/108
1.5. Übungen zur Antriebsauslegung
Ventilator
Was für eine Leistung benötigt ein Ventilator bei 1500 U/min wenn er bei 3000 U/min
eine Leistung von 12 kW aufnimmt?
Förderband
Welche Leistung benötigt ein Förderbandantrieb mit einem Wirkungsgrad von 90%,
welcher 1000 Tonnen pro Stunde über eine Höhe von 15 m fördert? (g = 9,81 m/s²)
Beschleunigung
Was für ein Drehmoment ist notwendig, um eine Schwungmasse (Motor und Last)
von 0,01 kgm² innerhalb 2 s von 3000 U/min auf 0 U/min abzubremsen? Das
konstante Reibungsmoment beträgt 0,2 Nm.
Zahnriemensystem
Was für eine Beschleunigung erfährt eine Masse von 100 kg, welche über einen
Zahnriemenantrieb mit 100 mm Poullidurchmesser über einen Getriebemotor (i = 5)
angetrieben wird? Der Motor hat eine Schwungmasse von 0,01 kgm² und ein
Drehmoment von 10 Nm. Die Reibung und weitere Massen werden vernachlässigt.
Positionierung
Welche Leistung braucht es um eine träge Masse von 0,5 kgm² (inklusive Motor) mit
minimaler Kraft innerhalb von 0.2 s über eine halbe Umdrehung zu positionieren?
1.6. Übung Hubgetriebe
Technische Angaben:
0,4 m Hub mit konstanter
Hubzyklus 2 s, Reversierzeit 0,2 s
Geschwindigkeit,
Zahnraddurchmesser 100 mm
Getriebeuntersetzung 1:10
Fahrwagen 20 kg, Motor 0,001 kgm², Masse von
Zahnriemen, Zahnrad und Getriebe vernachlässigt
Reibung bezogen auf Motorwelle 0,5 Nm
Gesucht:
Drehmomentverlauf über einen Hubzyklus
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
2.
Seite 13/108
Magnetismus
Damit in einer elektrischen Maschinen Kraft entsteht, braucht es Magnetismus. Bei
den meisten Antrieben erfolgt die Umwandlung von elektrischer in mechanische
Energie über die Lorentzkraft (Leiter im Magnetfeld). Bei einigen Maschinen erfolgt
die Umwandlung über die Maxwellkraft (Eisen im Magnetfeld). Das Eisen ist der
Leiter für den Magnetismus, das Kupfer ist der Leiter für den Strom. Beide Leiter
müssen sich gegenseitig umschliessen, damit eine elektrische Maschine funktioniert.
Schnitt durch einen permanenterregten Gleichstrommotor mit rotierenden Leiter
(Glockenankermotor).
Das erforderliche Magnetfeld kann entweder mit Strömen (Wicklungen) oder mit
Permanentmagneten erzeugt werden. Damit sich der Rotor in einer elektrischen
Maschine bewegen kann, muss ein Luftspalt vorhanden sein. Das Eisen leitet den
magnetischen Fluss etwa 500 bis 12000 mal besser als Luft, ist aber ab einer
Flussdichte von etwa 1,8 Tesla (2,2 Tesla Spezialbleche) gesättigt und erzeugt bei
magnetischen Wechselfeldern zusätzliche Verlustwärme. Die Verhältnisse
(Stromdichte, Flussdichte und Dimension) im Luftspalt ergeben das Drehmoment
eines elektrischen Antriebes.
2.1. Grundgrössen Magnetismus
2.1.1.
Magnetische Feldstärke
Um eine bewegte Ladung (ein Strom) bildet sich ein Magnetfeld. Das Integral der
magnetischen Feldstärke H [A/m] über eine geschlossene Kurve ergibt die
magnetische Durchflutung Θ [A] und ist gleich gross wie die Summe der durch die
Schlaufe fliessende Ströme I [A].
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 14/108
Um eine bewegte Ladung entsteht ein Magnetfeld.
2.1.2.
Magnetische Flussdichte
Im vom magnetischen Feld durchdrungenen Raum entsteht eine magnetische
Flussdichte B [Vs/m²] oder [T], welche proportional zur Stärke der magnetischen
Feldstärke H [A/m] ist. Die Grundgleichung lautet: B = μ H. Die magnetische
Permeabilität μ = μ0 μr wird in eine Konstante μ0 = 4 π 10-7 Vs/Am und in eine
materialabhängige und dimensionslose Grösse μr aufgeteilt. Bei den meisten Stoffen
ist μr = 1, wie im Vakuum. Vor allem bei Eisen ist die relative Permeabilität erheblich
grösser. Das Verhältnis von B zu H wird mit Magnetisierungskennlinien dargestellt,
wobei der Effekt der Sättigung besonders zu beachten ist. Im Elektroblech beträgt
die maximale magnetische Flussdichte 1,8 T (Tesla), bei Spezialblechen bei 2,2 T.
Magnetisierungskennlinien verschiedener Stoffe.
2.1.3.
Der magnetische Kreis
Wie einen elektrischen Kreis gibt es auch einen magnetischen Kreis. Die Spannung
U entspricht der Durchflutung Θ, der Strom I entspricht dem Fluss Φ. Die
Grundgleichung des elektrischen Kreises U = R I wird im magnetischen Kreis zu Θ =
Rm Φ. Das Eisen hat im Magnetkreis die gleiche Aufgabe wie die Kabel im
Elektrokreis. Der grosse Spannungsabfall erfolgt im Elektrokreis zum Beispiel über
eine Glühlampe, bei einer elektrischen Maschine ist es der Luftspalt, wobei dort
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 15/108
dadurch keine Wärme entsteht. Grundlagen für die Auslegung mit Magneten werden
im Kapitel Permanentmagnete gezeigt.
Magnetischer und Elektrischer Kreis
Der magnetische Widerstand Rm [A/Vs] rechnet sich für einen homogenen
stabförmigen Körper ohne Streuung mit der Länge l [m], der Querschnittsfläche A
[m²] und der Permeabilität μ [Vs/Am] mit Rm = l / (A μ). Der Magnetfluss in konkreten
Konstruktionen wird in der Praxis mit speziellen Computerprogrammen berechnet.
2.1.4.
Beispiele Magnetkreis
Beispiel 1
Wie gross ist die Induktion im Luftspalt
(0,5 mm) bei der untenstehender
Anordnung bei einem Strom von 100 A?
Vereinfachung: Die Querschnittfläche
des Luftspalts ist gleich gross wie die der
Eisenpole,
die
Streuung
wird
vernachlässigt.
Zu berechnender Magnetkreis mit
konstantem Querschnitt 2 Luftspalten.
Grundgleichungen:
Rm = RmFe + Rmδ
Rm = l / (A μ0 μr)
Rm = (lFe / AFe μ0 μr) + (2 δ / Aδ μ0)
für A = AFe = Aδ ergibt sich Rm = (lFe + 2 δ μr) / (A μ0 μr)
Grundgleichungen:
B=Φ/A
Φ = Θ / Rm
Θ=Iw
B = I w / (A Rm)
B = I w μ0 μr / (lFe + 2 δ μr)
B = 100 A 10 1,26 μVs/Am 4000 / (0,6 m + 2 0,0005 m 4000) = 1,09 T
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 16/108
Beispiel 2
Wie gross ist der Strom I2 in der
untenstehenden
Anordnung
damit die maximale Induktion 1 T
beträgt?
Vereinfachung:
Die
Streuung wird vernachlässigt.
Zu berechnender Magnetkreis mit
2 Spulen und dem breiten b und
schmalen s Querschnitt.
Grundgleichung: Φ = B A = konstant im Kreis, Je kleiner der Querschnitt, desto
grösser die Flussdichte: die grösste Induktion wird im schmalen Bereich auftreten.
Φ = Ab Bb = As Bs = 0,0002 m² 1 T = 200 μVs
Rm = Rmb + Rms Rm = l / (A μ0 μr)
Rm = (lb / Ab μ0 μr) + (ls / As μ0 μr
Rm = ((lb / Ab) + (ls / As)) / (μ0 μr)
Rm = ((0,3 m / 0,0004 m²) + (0,08m / 0,0002m²)) / (1,26 μVs/Am 4000 ) = 230 kA/Vs
Grundgleichung: Θ = Φ Rm
Θ = 200 μVs 230 kA/Vs = 46 A
Grundgleichungen: Θ = Θ1 + Θ2
Θ=Iw
Θ = (I1 w1) + (I2 w2) = (10A 10) + (I2 (-8)) = 46 A => I2 = (100 A - 46 A) / 8 = 6,8 A
Beispiel 3
Wie
gross
ist
die
Induktion
in
einem
magnetischen Kreis bei
einer Durchflutung von 1
kA? Die Eisenlänge ist
0,8 m, der Luftspalt 1
mm, die Magnetisierung
des
Eisens
zeigt
untenstehende
Kennlinie.
Magnetisierungskennlini
e des zu berechnenden
Magnetkreis
mit
Luftspalt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 17/108
Ohne Luftspalt wäre die magnetische Feldstärke H0 = Θ / l = 1 kA / 0,8 m = 1,25
kA/m und die Induktion 1,4 T (aus der Kurve gelesen)
Ohne Eisen wäre die die magnetische Feldstärke H = Θ / δ = 1 kA / 1 mm = 1 MA/m.
Die Induktion ist B0 = μ0 H = 1,26 μVs/Am 1 MA/m = 1,26 T
Wenn man diese beiden Punkte verbindet, so ergibt sich ein Schnittpunkt mit der
Magnetisierungskennlinie bei etwa 1 T
Lösung mit der blauen Luftspaltgeraden ergibt einen Schnittpunkt bei 1 T
2.2. Lorentzkraft
Die Lorentzkraft wirkt in den meisten elektrischen Maschinen wie Gleichstrom-,
Synchron- und Asynchronmaschinen.
Ein vom Strom durchflossener Leiter im Magnetfeld erfährt eine Kraft.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 18/108
Kraft
Induzierte Spannung
Quellenspannung
F
Ui
U
=
=
=
IB lw
vBlw
R I + Ui
Elektrische Leistung
Mechanische Leistung
Verlustleistung
Pel
Pm
Pv
= UI
= Fv
= R I²
= |Pel - Pm|
Auf einen Leiter wirkt im Magnetfeld eine Kraft (Lorenzkraft), welche proportional zur
Induktion B [T], zum Leiterstrom I [A], zur Leiterlänge l [m] und Windungszahl w [-]
ist. Wenn sich der Leiter bewegt, wird eine Spannung induziert, deren Stärke
proportional zur Induktion, zur Geschwindigkeit v [m/s], zur Leiterlänge und
Windungszahl ist. Wenn ein Strom fliesst, wirkt zusätzlich der ohmsche
Spannungsabfall über den Widerstand R [Ohm]. Die im Widerstand anfallende
Verlustwärme ist auch die Differenz zwischen der mechanischen und elektrischen
Leistung P [W].
Die Anzahl Windungen hat mit der Kraftwirkung direkt nichts zu tun, sondern ist nur
eine Impedanzanpassung an die elektrische Quelle. Eine hohe Windungszahl ergibt
eine hohe Spannung und einen geringen Strom. Der Strom ist die mögliche
Leiterquerschnittsfläche ACu [m²] (Luftspalt mal Magnetbreite) mal die zulässige
Stromdichte J [A/m²] (z.B. 10 MA/m²). Je nach Wicklungsart (Hohlräume) und Dicke
der Drahtisolation ist die Summe der Ströme etwa konstant, also unabhängig von der
Windungsanzahl. Die Kupferwärmeverluste PvCu = R I ² [W]. Bei einer Wicklung mit
w [-] Windungen nimmt der Leiterquerschnitt mit ACu / w und die Wicklungslänge mit
l w zu, das heisst der Widerstand R = ρ l / ACu nimmt mit der Windungszahl
quadratisch zu (ρ von Kupfer ist 17 nΩm). Der Strom nimmt mit I / w ab, was von der
Wicklungszahl unabhängige Kupferwärmeverluste R w² (I / w)² = R I ² ergibt.
Überschlagsmässig (mit Füllfaktor ff = 1) sind die Kupferverluste PvCu = ρ J ² V,
wobei V [m³] das Luftspaltvolumen abzüglich des erforderlichen Abstandes für die
ungehinderte Leiterbewegung ist. In elektrischen Antrieben wird mit dem zulässigen
Ankerstrombelägen gerechnet.
2.3. Permanentmagnete
Für ein hohes Drehmoment ist eine hohe Induktion (Remanenzinduktion Br)
notwendig. Damit das Permanentmagnet aber durch hohe Ströme nicht
entmagnetisiert wird, sollte auch die Koerzitivfeldstärke Hc hoch sein. Die günstigen
Ferrit-Magnete haben keine hohe Remanenz aber eine mittlere Koerzitivfeldstärke.
Aluminium-Nickel-Cobalt-Magnete (Alnico) haben eine hohe Remanenz sind aber
leicht entmagnetisierbar. Samarium-Cobalt-Magnete (SmCo) oder auch NeodymiumEisen-Bor-Magnete haben die gewünschten Eigenschaften, sind aber teuer. Ein
weitererer Preisfaktor ist die Temperaturfestigkeit, denn Magnete verlieren mit
zunehmender Temperatur ihre magnetischen Eigenschaften (Stichwort CurieTemperatur).
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 19/108
Magnetisierungskennlinien von Permanentmagneten.
2.3.1.
Auslegungsbeispiel
Wie gross ist die Induktion im Luftspalt gemäss untenstehender Anordnung?
Schnitt des magnetischen
Kreises (grün = Magnet).
Magnetisierungskennline des Permanentmagneten.
Bei konstanten Querschnitt und unter Vernachlässigung der Streuung herrscht im
ganzen Magnetkreis die gleiche Flussdichte: Bmag = Bluft
Die Durchflutung im Luftspalt ist gleich gross wie die im Magnet:
Hluft lluft = Hmag lmag
Im Luftspalt gilt auch die Gleichung:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 20/108
Bluft = μ0 Hluft eine Geradengleichung
Für den Magneten gilt die Magnetisierungskurve, für die Luftspaltgerade ergibt sich
somit folgende Gleichung:
Hmag = Bmag lluft / (lmag μ0)
Hmag = Bmag 0,01 m / (0,03 m 1,27 μVs/Am) = Bmag 265 kAm/Vs
Daraus folgt: bei 0 A/m ist die Luftspaltinduktion 0 T, bei 100 kA/m wäre die
Luftspaltinduktion 0,38 T.
Die Flussdichten im Luftspalt und im Magnet sind im Schnittpunkt bei 0,3 T gleich
gross.
Grafische Lösung mit der Luftspaltgeraden.
Um die magnetische Energie des Permanentmagneten optimal auszunützen, sollten
Selten-Erde-Magnete etwa 1 bis 2-mal so dick wie der Luftspalt sein und zur
Reduktion der Streuung am besten direkt am Luftspalt
2.4. Maxwellkraft (Magnetfeld auf Eisen)
Die
Maxwellkraft
wirkt
Magnetlagersystemen.
bei
Reluktanzmaschinen,
Hubmagneten
und
Die magnetische Kraft auf Eisen ist proportional zur Änderung der magnetischen
Energie Wm [J] im Luftspalt in Bezug auf die Distanz δ [m]. Es gibt nur eine
anziehende Kraft. Umgerechnet auf die Feldgrössen im Luftspalt (für die Fläche A
wird nur eine Seite genommen) ist die Kraft: F = dWm / dδ.
Bezogen auf den Strom ergibt sich daraus bei AFe = Aδ:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 21/108
Die Kraft nimmt also mit dem Strom und der Windungszahl quadratisch zu. Das
Maximum ist erreicht, wenn der Luftspalt verschwindet. Achtung, die relative
Permeabilität ist nur in einem gewissen Bereich konstant (Sättigung). Bei genauen
Berechnungen ist die Magnetisierungskennlinie der verwendeten Werkstoffe zu
verwenden. Die maximale Induktion ist nicht grösser als 1,8 T (bei speziellen
Eisensorten 2,2 T).
Rechenbeispiel
Was für ein Strom ist gemäss untenstehender Anordnung für eine Zugkraft von 10 N
notwendig?
Prinzip der Maxwellkraft am Beispiel eines Eisenjochs (die Querschnittsfläche A wird
nur auf einer Seite berücksichtigt).
F = ((w I μr) / (lFe + δ μr))² A μ0
I = √(F / (A μ0)) (lFe + d μr) / ( w μr)
I = √(10 Nm / (0,0004 m² 1,27 μVs/Am)) (0,4 m + (0,001 m 5000)) / (100 5000) =
1,52 A
2.5. Drehmoment in einem Motor
Ein Elektromotor ist ein elektromagnetischer Energiewandler. Der eine Teil des
Motors ist fest (Stator), der andere Teil beweglich (Rotor). Bei den meisten Motoren
ist der Rotor innen, und überträgt mit einer Welle sein Drehmoment an die Last.
Das Drehmoment wird im Luftspalt (zwischen Stator und Rotor) erzeugt. Bei den
meisten Motoren (Ausnahme Reluktanzmotoren) entsteht es durch die Kraft, welche
auf die Stromleiter im Magnetfeld ausgeübt wird (Lorentzkraft). Das Magnetfeld wird
entweder durch integrierte Elektromagnete (Erregerwicklung) oder mit
Permanentmagneten gebildet. Lokal gesehen wirkt eine Schubkraft, deren Grösse
proportional zum Magnetfeld und zum Strombelag ist. Die maximale Stärke des
Magnetfeldes ist durch die Sättigung des Eisens im Bereich von 1,5 Tesla begrenzt.
Die Wärme, welche im Stromleiter entsteht, muss abgeführt werden. Somit ist die
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 22/108
maximale Schubkraft begrenzt (bei Normmotoren selten über 30 kN/m²). Das
Drehmoment an der Motorwelle ergibt sich aus dem Produkt Schubkraft mal
Luftspaltfläche mal Hebelarm, es ist somit proportional zum Rotorvolumen.
Zwischen Stator und Rotor liegt Die Krafterzeugung erfolgt im Luftspalt des
Motors.
der Luftspalt.
Mit der Induktion B [Vs/m²], dem Ankerstrombelag A [A/m], dem Rotorradius r [m]
und der Rotorlänge l [m] rechnet sich das Drehmoment M ~ B A r² l [Nm]. Das
Drehmoment ist proportional zum Rotorvolumen (bei den üblichen Innenläufern).
Beispiel Asynchronmaschine
Diese Theorie lässt sich am einfachsten an den normierten Asynchronmotoren
überprüfen. Vergleicht man die Leistung von 2 und 4-poligen Motoren, so sieht man,
dass ein 4-poliger Motor oft die gleiche Leistung hat, wie ein gleichgrosser 2-poliger
Motor. Dieser braucht dafür aber die doppelte Drehzahl. Der 4-polige Motor hat einen
grösseren Rotor (erkennbar am Trägheitsmoment) und dadurch ein grösseres
Drehmoment.
Der 4-polige Motor (rechts) hat ein grösseres Drehmoment als der 2-polige, weil er
für den magnetischen Fluss weniger Eisen im Stator braucht.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 23/108
2.6. Formeln zum Magnetismus
Bezeichnung
Magnetische
Feldstärke
Magnetische
Durchflutung
Magnetische
Flussdichte
Magnetische
Permeabilität
Magnetischer
Fluss
Symbol Einheit
Grundgleichu
ng
H = Q (r x v)
/ (4 π r³)
Vereinfachu
Bemerkungen
ng
H=
Ladung Q [As], Radius r [m],
I / (2 π r) Geschwindigkeit v [m/s]
Θ=wI
H
A/m
Θ
A
Θ = ∫ H dl
B
T=
Vs/m²
B=μH
μ
Vs/Am
μ = μ0 μr
μr_Luft ≈ 1 μ0 = 4 π 10-7 Vs/Am
Φ
Vs
Φ = ∫ B dA
B=Φ/A
Flussverkettung Ψ
Vs
Ψ=wΦ
Rm
A/Vs
Θ = Rm Φ
Wm
J
Maxwellkraft
F
N
Lorentzkraft
F
N
Wm =
∫ ½ B H dV
F=
dWm / dδ
F = I (l x B)
Induzierte
Spannung
ui
V
ui = dΨ / dt
Magnetischer
Widerstand
Magnetische
Energie
Induktivität
Streuinduktivität
Gegeninduktivit
ät
Übersetzungsverhältnis
L
H
Lσ
H
M
H
ü
-
ui =
∫ (B x v) dl
u = L di / dt
L1 =
Lh + Lσ1
M=
k √(L1 L2)
ü = w1 / w2
GLOOR ENGINEERING, CH-7434 SUFERS
Anzahl Windungen w [-]
B wird auch Induktion
genannt
Anzahl vom Fluss
durchflossenen Windungen w
[-]
Rm = l / (A
Länge l [m] , Fläche A [m²]
μ)
Wm = ½ B
Volumen V [m³]
HV
F=ΦH
Luftspaltdicke δ [m]
F = B I l w Leiterlänge im Luftspalt l [m]
F = I1 I2 l μ Hin- I1 und Rückleiter I2 [A]
/ (2 π r)
(eine Schlaufe streckt sich)
Elektrische
ui =
Winkelgeschwindigkeit ω
wAωB
[1/s]
Relative Geschwindigkeit
ui = B v l w
Leiter zu Magnetfeld v [m/s]
L = w² / Rm
Induktivität Primärseite L1
[H], Hauptinduktivität Lh [H]
Koppelfaktor k < 1
ü = u1 / u2
Primärseite mit Index 1
= i2 / i1
16. April 2008
Elektrische Antriebstechnik
Seite 24/108
2.7. Übungen zum Magnetismus
Magnetischer Kreis
Ein magnetischer Kreis mit 400 mm Länge und 400 mm² Querschnitt hat bei seiner
Nenninduktion von 1,5 T ein relative Permeabilität von 4000. Was für eine
Windungszahl ist notwendig, damit bei einem Strom von 1 A die Nenninduktion
erreicht wird.
Magnetischer Kreis im Motor
Ein Motor mit zu vernachlässigendem magnetischem Widerstand des Stators und
Rotors hat 2 Luftspalte δ von 0,5 mm. Was für eine Induktion ergibt sich wenn durch
die 120 Windungen ein Strom von 10 A fliesst?
Lorenzkraft
Was für ein Strom muss durch eine quadratische Wicklung mit 100 mm Kantenlänge
und 50 Windungen fliessen, damit in einem Magnetfeld von 1 T ein maximales
Drehmoment von 10 Nm entsteht?
Drossel
Wie viele Windungen sind notwendig, damit eine Drossel mit einem magnetischen
Kreis mit 300 mm Länge, 600 mm² Querschnitt und einer relativen Permeabilität von
4000 eine Induktivität von 1 H hat?
Transformator
Ein 1 kVA, 230 V, 50 Hz Einphasentransformator hat einen Leerlaufstrom von 1 A mit
einem cosφ von 0,5. Mit dem Ohmmeter wird ein Wicklungswiderstand von 3 Ω
gemessen. Wie hoch ist der Wirkungsgrad des Transformators, wenn seine
Nennleistung von 1 kW übertragen wird?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
3.
Seite 25/108
Kommutatormaschinen
Kommutatormaschinen haben einen Kommutator, welcher abhängig von der
Rotorlage die Stromrichtung in den einzeln verdrahteten Stromleitern des Rotors
umschaltet. Der typische Vertreter dieser Maschinenart ist die Gleichstrommaschine,
da solche Maschinen bei entsprechender Auslegung (Universalmotoren) auch mit
Wechselstrom betrieben werden, wird hier als Oberbegriff Kommutatormaschine
gewählt. Der Begriff Maschine wird verwendet, weil die meisten Antriebe sowohl als
Motor wie auch als Generator betrieben werden können.
Foto eines typischen industriellen Gleichstrommotors mit aufgebautem Fremdlüfter.
Das Prinzip der Kommutatormaschine ist relativ einfach, die mechanische
Konstruktion dafür recht aufwendig. Die Leiter des Rotor werden vom Magnetfeld des
Stators durchdrungen. Die Kommutierung (Nachführung des Strombelages im Rotor)
erfolgt auf mechanische Art. Dazu sind auf der Achse Schalter (Kollektor mit Bürsten)
angebracht, welche direkt durch die Drehung die entsprechenden Leiter (Windung)
einschalten. Die mechanische Festigkeit des Kollektors begrenzt die
Maximaldrehzahl
des
Gleichstrommotors.
Die
Grundfunktionen
des
Gleichstrommotors sind einfach: das Drehmoment ist proportional zum Strom, die
Drehzahl proportional zur Spannung. Ein entsprechendes Regel-/Steuergerät ist
einfach und günstig (Seriewiderstand in der Erregung, Thyristortechnik, DCChopper).
Foto eines Kommutators, die Bürsten sind nicht abgebildet.
Das Prinzip des Gleichstrommotors funktioniert je nach Schaltungsart und Auslegung
auch mit Wechselstrom, wenn die Erregung und der Ankerstrom die gleiche
Frequenz haben. Die meisten einfachen Kleinantriebe (Scheibenwischermotoren,
Kinderspielzeuge, Haushaltgeräte, Stellantriebe ...) sind mit Kollektormotoren
ausgerüstet, welche direkt ans Netz geschaltet werden können.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 26/108
3.1. Grundgleichungen
Der Gleichstrommotor ist der klassische Regelantrieb. Er wird als Hauptantrieb bis zu
einigen MW Leistung, als Universalantrieb, als Servoantrieb und als Stellantrieb bis
hinunter in den Milliwattbereich eingesetzt. Die einfachen Grundgleichungen lauten:
Formel
Einheit Bezeichnung
Bemerkungen
M=IΨ
Nm
Drehmoment
U=RI+ΩΨV
Spannung
Ia = U / R
A
Anlaufstrom
Ma = Ia Ψ
Nm
Anlaufmoment
Ω0 = U / Ψ
rad/s Leerlaufdrehzahl
P=MΩ
W
Mechanische Leistung Leistungsbetrachtung
Pe = U I
W
Elektrische Leistung
Pv = R I ²
W
Rotorverlustleistung im Rotor (Anker)
Symbol
Einheit Bezeichnung
Bemerkungen
M
Nm
Drehmoment
Ω
rad/s Drehzahl
1500 U/min sind 157 rad/s
U
V
Spannung
für den Rotor (Anker)
I
A
Strom
für den Rotor (Anker)
R
Ω
Rotorwiderstand
Ψ
Vs
Flussverkettung
n
Index für Nennwert
Die
Drehmoment-Drehzahlkennlinie
Gleichstrommaschine ist eine Gerade.
GLOOR ENGINEERING, CH-7434 SUFERS
einer
fremderregten
15
kW
16. April 2008
Elektrische Antriebstechnik
Seite 27/108
Das Nennmoment Mn ist die maximale zulässige Belastung, bei dem die
entstehende Verlustwärme Pvn = R In² [W] den Antrieb nicht überhitzt. Die
Nenndrehzahl Ωn ist die Motordrehzahl, welche sich bei Nennspannung Un und
Nennbelastung Mn einstellt, dann fliesst auch der Nennstrom In [A]. In diesem
Betriebspunkt gibt der Motor seine Nennleistung Pn = Mn Ωn [W] ab und nimmt die
Nennleistung Pen = Un In [W] auf.
Oft wird auch von bürstenlosen Gleichstrommaschinen "brushless DC" gesprochen.
Damit ist ein kommutatorloser Antrieb mit dem Betriebsverhalten einer
Gleichstrommaschine gemeint. Eigentlich handelt es sich um eine mit
Permanentmagneten erregte Synchronmaschine, welche mit blockförmigen Strömen
angesteuert wird.
Ein Motor gibt nur seine Nennleistung ab, wenn die Last genau diese erfordert.
Praktisch ist es unwahrscheinlich dass in einer Anwendung der Motor mit seiner
Nennleistung belastet wird. Meistens ist das Lastmoment tiefer als das Nennmoment
des Motors. Wenn einem Motor über längere Zeit mehr Drehmoment abverlangt wird,
als er dauernd abgeben kann, wird er zu warm und kann ausfallen.
Schnitt durch einen 2-poligen permanenterregten Gleichstrommotor.
Schnitt durch einen 4-poligen permanenterregten Gleichstrommotor.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 28/108
3.2. Wicklungen von Gleichstrommaschinen
Prinzipieller Aufbau der Ankerwicklung
Eine 2-polige Gleichstrommaschine mit 8 Kommutatorlamellen. Gestrichelte Linien
sind Verbindungen auf der Rückseite.
Wicklungsplan der 2-poligen Gleichstrommaschine.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
3.2.1.
Seite 29/108
Wicklungsarten
Stab-Schleifenwicklung
Spulen-Schleifenwicklung
Stab-Wellenwicklung
Spulen-Wellenwicklung
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
3.2.2.
Seite 30/108
Wicklungen eines Indstriemotors
2-polige Gleichstrommaschine mit allen Wicklungsoptionen.
Wicklungsname
Klemmenbezeichnung
DIN 42401
VDE 0570
A1-A2
A-B
längs/
quer
q
Wendepolwicklung
B1-B2
GW-HW
q
Kompensationswicklung
C1-C2
GK-HK
q
Reihenschlusswicklung
D1-D2
E-F
d
Nebenschlusswic
klung
Fremdschlusswic
klung
E1-E2
C-D
d
F1-F2
I-K
d
Ankerwicklung
GLOOR ENGINEERING, CH-7434 SUFERS
Funktion
Grundwicklung für die
Drehmomenterzeugung
Hilfswicklung in der neutralen
Achse zur Vermeidung von
Bürstenfeuer
Hilfswicklung in den Polschuhen
zur Reduktion der
Ankerrückwirkung
Erregerwicklung in Serie zur
Ankerwicklung (Reihenschluss,
Kompound)
Erregerwicklung parallel zur
Ankerwicklung
Erregerwicklung unabhängig zur
Ankerwicklung
16. April 2008
Elektrische Antriebstechnik
Seite 31/108
Einfluss der Ankerrückwirkung (Sättigung der Polschuhkanten durch das Magnetfeld
des Ankerstromes)
3.3. Schaltungen der Gleichstrommaschine
Für die Erregung (Erzeugung des Magnetfeldes) gibt es folgende 5 Varianten:
3.3.1.
Permanenterregt
Erregung mit Permanentmagneten, üblich bei Kleinmotoren und Servoantrieben
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
3.3.2.
Seite 32/108
Fremdschluss
Erregung unabhängig des Ankerstromes, übliche Schaltung bei Industriemotoren
3.3.3.
Nebenschluss
Erregung parallel zur Ankerspannung
3.3.4.
Hauptschluss
auch Reihenschluss genannt
Erregung im Ankerstromkreis (Sättigungseffekt), geeignet für Wechselstrombetrieb,
wird vor allem als Traktionsantrieb angewendet.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
3.3.5.
Seite 33/108
Compoundschluss
auch Doppelschluss genannt
Kombination von Fremd- und Hauptschluss, wird kaum noch eingesetzt.
3.3.6.
Sättigungseffekt
Einfluss der Sättigung am Beispiel der Reihenschlussmaschine.
3.3.7.
Zusammenstellung der Kennlinien
Zusammenstellung der 4 unterschiedlichen Drehmoment-Drehzahlkennlinien bei
konstanter Spannung.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 34/108
3.4. Leistungen der Gleichstrommaschine
Bei der permanent- und fremderregten Gleichstrommaschine sind die Beziehungen
für die Leistung sehr einfach.
Formel
Pm = M Ω
Pe = U I = M Ω0
Pv = R I² = M
(Ω0 - Ω)
Per = Ue Ie
Ue = Re Ie
Ma = Ψ U / R
Ω0 = U / Ψ
Einheit Bezeichnung
W
Mechanische Leistung
W
Elektrische Leistung
W
Rotorverlustleistung
W
V
Nm
rad/s
Erregerleistung
Erregerspannung
Anlaufmoment
Leerlaufdrehzahl
η = Pab / Pauf
-
Wirkungsgrad
Symbol
M
Ω
U
I
Ψ
R
Ie
Re
Einheit
Nm
rad/s
V
A
Vs
Ω
A
Ω
Bezeichnung
Drehmoment
Drehzahl
Ankerspannung
Ankerstrom
Flussverkettung
Ankerwiderstand
Erregerstrom
Rotorwiderstand
Pab
W
Abgabeleistung
Pauf
W
Aufnahmeleistung
Bemerkungen
Luftspaltleistung (in den Rotor)
bei fremderregten Maschinen
bei fremderregten Maschinen
bei fremderregten Maschinen gehört
die Erregerleistung zur
Aufnahmeleistung
Bemerkungen
1500 U/min sind 157 rad/s
für den Rotor (Anker)
für den Rotor (Anker)
Widerstand der Rotorwicklung
für die Erregung (Stator)
Widerstand der Erregerwicklung
im Motorquadrant die mechanische
Leistung, im Generatorquadrant die
elektrische Leistung
bei fremderregten Maschinen gehört
die Erregerleistung zur
Aufnahmeleistung
In der Drehmoment-Drehzahl-Kennlinie der Gleichstrommaschine lassen sich
Leistungen als Flächen darstellen.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 35/108
Leistungsaufteilung im Nennbetrieb.
Leistungsaufteilung bei Überlastbetrieb.
Leistungsaufteilung im Teillastbetrieb.
Leistungsaufteilung im Generatorbetrieb. Leistungsaufteilung im Gegenstrombetrieb.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 36/108
3.5. Regelung von Gleichstrommaschinen
Eine fremderregte Gleichstrommaschine, welche in der Feldschwächung betrieben
wird, deckt mit einem Vierquadranten Gleichstromregelgerät ein grosses
Kennlinienfeld ab.
Kennlinienfeld einer fremderregten Gleichstrommaschine 24 kW mit einem
Gleichstromregelgerät.
Ausgangspunkt für das Kennlinienfeld einer Gleichstrommaschine ist der Nennpunkt
(Nenndrehmoment und Nenndrehzahl). Die übliche Bemessung der Regelgeräte
lässt im Minutenbereich den doppelten Nennstrom zu, was eine Begrenzung des
Kennlinienfeldes beim doppelten Nenndrehmoment im Motor- und Generatorbereich
ergibt. Die zusätzliche Möglichkeit der Feldschwächung (meistens nur bis zum
halben Erregerstrom) erweitert das Kennlinienfeld seitlich mit einem hyperbolisch
abnehmenden Maximal- und Dauerdrehmoment (Konstantleistungsbereich).
Das Grundprinzip der Regelung basiert auf einer Stromregelung. Der Strom ist
proportional zum Drehmoment. Fälschlicherweise wird diese Betriebsart oft
Drehmomentregelung genannt, obwohl das Drehmoment nicht gemessen wird.
Richtig wäre der Begriff des Drehmomentstellers. Bei einem vorgegebenen
Drehmoment beschleunigt der Antrieb mit dem entsprechenden Strom, bis die
Gerätespannung nicht mehr ausreicht um den Strom gegen die induzierte
Ankerspannung zu treiben.
Dieser Stromregelung wird eine Drehzahlregelung überlagert. Über eine DrehzahlIstwert-Erfassung (Tacho, Inkrementalgeber ..) wird die Ist-Drehzahl mit der SollDrehzahl verglichen. Wenn die Ist-Drehzahl kleiner ist, wird mehr Strom
(Drehmoment) gegeben, im umgekehrten Fall weniger. Zur Einsparung der DrehzahlIstwert-Erfassung kann auch über die Ausgangsspannung und den Ausgangsstrom
die Drehzahl ausgerechnet werden (RI-Kompensation). Die Drehzahl ist proportional
zur Spannung minus Ankerwiderstand mal Ankerstrom. Diese Methode ist aber
ungenau (Temperaturabhängigkeit des Widerstandes, Messfehler Spannung und
Strom, Feldschwächung).
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 37/108
3.6. Datenblatt einer Gleichstrommaschine
Nenndaten einer 4-poligen Gleichstrommaschine mit dem Kennmoment von 135 Nm
und der Baugrösse 132.
Nenndrehzahl
bei Nennspannung
260V 400V 440V
U/min U/min U/min
730
830
515
930
1045
605
1060
1190
715
1230
1375
845
1430
1595
1015
1700
1895
1285
2100
2335
1665
2690
2980
2280
3645
Nennleistung
Pn
kW
10,2
11,6
7,4
13,3
15,0
8,9
15,6
17,5
9,7
16,7
18,6
12,2
20,7
23,1
14,0
23,4
26,1
15,8
25,8
28,7
22,1
35,7
39,6
27,7
44,1
NennWirkungsgrad
η
%
68,8
71,3
61,6
73,6
75,7
65,6
76,2
78,1
69,0
78,5
80,1
72,2
80,7
82,2
74,8
82,4
83,7
78,8
84,9
86,0
82,5
87,4
88,2
85,1
88,9
GLOOR ENGINEERING, CH-7434 SUFERS
Nennstrom
In
A
NennDrehmoment
Mn
Nm
Ankerwiderstand
bei 115 °C
R
Ω
35
133
2,81
43
137
1,88
49
140
1,46
51
130
1,22
62
138
0,89
68
132
0,71
74
117
0,52
100
127
0,30
122
116
0,19
16. April 2008
Elektrische Antriebstechnik
Seite 38/108
Allgemeine technische Angaben:
Bezeichnung
Maximal zulässige mechanische
Drehzahl
Minimale Drehzahl mit
konstantem Drehmoment
Schwungmasse
Erregerleistung für Nennfluss
Erregerspannungen
Maximal zulässige
Ankerspannung
Erforderliche Kühluftmenge
Druckabfall bei der vollen
Kühlluftmenge
Nettogewicht in Fussausführung
Nettogewicht in
Flanschausführung
Wert
4000 U/min
40 U/min
0,12 kgm²
830 W
110 bis 440 V
Bemerkungen
darüber kann die Maschine mechanische
Schaden nehmen
darunter sind Drehmomentpulsationen zu
erwarten
135 kg
unabhängig von der Erregerwicklung
muss entsprechend bestellt werden
darüber kann die Maschine dielektrisch
Schaden nehmen
für eine Belastung mit dem Nennstrom
muss vom Kühlluftventilator aufgebracht
werden
Bauform B3
150 kg
Bauform B5
620 V
470 m³/h
550 Pa
3.7. Übung Kommutatormaschine
3.7.1.
Theoretischer Kleinantrieb
Nenndaten einer permanent erregten Gleichstrommaschine: M = 180 mNm,
n = 6876 U/min, U = 24 V, I = 6 A, m = 500 g, J = 13 mgm²
Die Eisen-, Reibungs- und Zusatzverluste, die Sättigung und Ankerrückwirkung
werden vernachlässigt.
1.
Skizzieren Sie die skalierte Drehmoment-Drehzahl-Kennlinie dieser Maschine
im Bereich von –1000 U/min bis zu 9000 U/min und zeichnen sie den
Nennpunkt ein.
2.
Zeichnen Sie in Skizze aus der (Aufgabe 1) die Drehmoment-DrehzahlKennlinie dieser Maschine an einer Spannung von 12 V.
3.
Zeichnen Sie in Skizze aus der (Aufgabe 1) die Drehmoment-DrehzahlKennlinie dieser Maschine an einem Strom von 6 A.
4.
Wie hoch die maximale dauernde Abgabeleistung beim Betrieb mit 12 V?
5.
Wie hoch darf die maximale Spannung sein, damit der Motor dauend blockiert
betrieben werden kann?
6.
Wie hoch ist die maximale Leistung die bei Nennspannung aus dem Antrieb
kurzzeitig herausgeholt werden kann?
7.
Wie gross ist der Wirkungsgrad im Nennpunkt?
8.
Wie gross ist der Wirkungsgrad bei einer Belastung mit 18 mNm?
9.
Wie hoch ist die Stromaufnahme bei Nennspannung und einer Drehzahl von 764 U/min?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 39/108
10. Wie hoch ist die Stromaufnahme bei Nennspannung und einer Drehzahl von
8404 U/min?
11. Wie lange dauert der Hochlauf der unbelasteten Maschine am Nennstrom bis
zu Nenndrehzahl?
12. Wie lange dauert der Hochlauf der unbelasteten
Nennspannung bis zu Nenndrehzahl?
3.7.2.
Maschine
an
der
Realer Kleinantrieb
Nenndaten ähnlich wie Antrieb A): M = 180 mNm, n = 6876 U/min, U = 24 V, I = 6 A,
m = 500 g, J = 13 mgm² und I0 = 0,2 A (Leerlaufstrom)
Die Reibungsverluste werden berücksichtig. Die Eisen- und Zusatzverluste, die
Sättigung und Ankerrückwirkung werden vernachlässigt.
1.
Wie hoch ist das konstante Reibungsmoment?
2.
Wie hoch ist die theoretische Leerlaufdrehzahl?
3.
Wie hoch ist die reale Leerlaufdrehzahl?
4.
Wie hoch ist der Anlaufstrom und das Anlaufmoment?
5.
Wie gross ist der Wirkungsgrad im Nennpunkt?
6.
Wie gross ist der Wirkungsgrad bei einer Belastung mit 18 mNm?
3.7.3.
Theoretischer Grossantrieb
Nenndaten einer industriellen Gleichstrommaschine: P = 90 kW, n = 1910 U/min,
U = 400 V, I = 250 A, Ue = 200 V, Ie = 7 A, m = 425 kg, J = 0,64 kgm²
Die Eisen-, Reibungs- und Zusatzverluste, die Sättigung und Ankerrückwirkung
werden vernachlässigt.
1.
Skizzieren Sie die skalierte Drehmoment-Drehzahl-Kennlinie dieser Maschine
im Bereich von –500 U/min bis zu 4500 U/min und zeichnen sie den Nennpunkt
ein.
2.
Zeichnen Sie in Skizze aus der (Aufgabe 1) die Drehmoment-DrehzahlKennlinie bei halber Erregung.
3.
Wie gross ist der Wirkungsgrad im Nennpunkt?
4.
Wie gross ist der Wirkungsgrad bei einer Belastung mit dem Halben
Nennmoment?
5.
Wie gross ist der Wirkungsgrad bei einer Belastung mit den Doppelten
Nennmoment?
6.
Wie gross ist der Wirkungsgrad beim Antrieb mit dem Nennmoment im
Generatorquadranten?
7.
Wie gross ist der Wirkungsgrad beim Antrieb bei der Belastung mit der
Nennleistung bei halber Erregung?
8.
Wie lange dauert etwa der Hochlauf der Maschine bis zu Nenndrehzahl, bei
einer Strombegrenzung mit 250 A?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
9.
Seite 40/108
Wie viel Wärme entsteht im Rotor beim Hochlauf auf die Nenndrehzahl an der
Nennspannung?
10. Wie gross ist das Bremsmoment im Leerlauf, wenn ein Klemmenkurzschluss an
der Ankerwicklung erfolgt?
11. Wie gross ist die
Ankerspannung?
maximale
dauernde
Abgabeleistung
bei
200
V
12. Wie gross ist der Wirkungsgrad bei einer Belastung mit dem Nennmoment und
Betrieb mit 200 V Ankerspannung?
3.7.4.
Realer Grossantrieb
Nenndaten ähnlich wie Antrieb C): P = 90 kW, n = 1910 U/min, U = 400 V, I = 250 A,
Ue = 200 V, Ie = 7 A, m = 425 kg, J = 0,64 kgm² und R = 0,12 Ω, Mr = 5 Nm
(Reibungsmoment)
Die Eisen- und Reibungsverluste werden berücksichtig. Die Zusatzverluste, die
Sättigung und Ankerrückwirkung werden vernachlässigt.
1.
Wie gross sind die Kupferverluste im Nennpunkt?
2.
Wie gross sind die Reibungsverluste im Nennpunkt?
3.
Wie gross sind die Eisenverluste im Nennpunkt?
4.
Wie hoch ist etwa der Leerlaufstrom?
5.
Wie hoch ist etwa die reale Leerlaufdrehzahl?
6.
Wie hoch ist das Anlaufmoment?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
4.
Seite 41/108
Leistungselektronik
Für die Ansteuerung von elektrischen Antrieben werden oft Halbleiter eingesetzt. Da
die entsprechenden Schaltungen und Komponenten für die Stromversorgung
(Bereitstellung von elektrischer Leistung) eingesetzt werden, spricht man von
Leistungselektronik. Zusätzlich sind die Spannungen und Ströme oft sehr viel höher,
als in der übrigen Elektronik.
Für die Umwandlung von Wechselstrom in Gleichstrom gibt es Gleichrichter, für die
Umwandlung von Gleichstrom in Wechselstrom Umrichter.
4.1.1.
B2-Schaltung
Brückenschaltung mit 4 Dioden um Wechselstrom (1-phasig) gleichzurichten.
Es ergeben sich über eine Periode 2 Halbwellen (B2).
Der Spitzenwert der Zwischenkreisspannung ist derselbe wie derjenige der
Eingangsspannung:
Der lineare Mittelwert Ud der Zwischenkreisspannung rechnet sich:
Bei einer Netzspannung von 230 V ergibt das:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
4.1.2.
Seite 42/108
B6-Schaltung
Brückenschaltung mit 6 Dioden um Drehstrom (3-phasig) gleichzurichten.
Es ergeben sich über eine Periode 6 Halbwellen (B6).
Der Spitzenwert der Zwischenkreisspannung ist derselbe wie derjenige der
Eingangsspannung zwischen 2 Phasen:
Der lineare Mittelwert Ud der Zwischenkreisspannung rechnet sich:
Bei einer Netzspannung (Phase zu Nulleiter) von 230 V (oder Phase zu Phase) von
400 V ergibt das:
Bei einer Last ergeben sich folgende Leiterströme:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
4.1.3.
Seite 43/108
B6-Schaltung mit Glättungskondensator
Um die Zwischenkreisspannung zu glätten werden Zwischenkreiskondensatoren
eingesetzt.
Daraus ergibt sich folgende geglättete Zwischenkreisspannung und das typische Bild
mit 2 Stromhöcker während einer Spannungshalbwelle in er Zuleitung.
4.1.4.
Phasenanschnittsteuerung
Mit Thyristoren kann in einer B2 oder B6 Schaltung der Durchgangszeitpunkt der
Halbleiter stufenlos verschoben werden.
4.2. Zusammenstellung Gleichrichterschaltungen
Für die Umformung von Wechselstrom in Gleichstrom mit Halbleiter gibt es folgende
Schaltungen:
U1 = Netzspannung, Ud = gleichgerichtete Spannung, U = Effektivwert, Û =
Spitzenwert, Ū = Mittelwert
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Schaltungstyp
Seite 44/108
Schema
Kurven
M1: Einwegschaltung
minimaler Schaltungsaufwand,
hohe Bauteilbelastung
1 Diode, 180° stromführend
Ûd = Û1 = √2 U1 = 1,41 U1
Ūd = Ûd / π = 0,45 U1
Ud = U1 / 2 = 0,5 U1
M2: Mittelpunktschaltung
oft realisiert in Netzgeräten,
Mittelpunktabgriff am Trafo
2 Dioden, 180° stromführend
Ûd = Û1 = √2 U1 = 1,41 U1
Ūd = 2 Ûd / π = 0,90 U1
Ud = U1
B2: Brückenschaltung
oft realisiert, für Wechselstrom
4 Dioden, 180° stromführend
Ûd = Û1 = √2 U1 = 1,41 U1
Ūd = 2 Ûd / π = 0,90 U1
Ud = U1
M3: Mittelpunktschaltung
selten realisiert, für kleinere
Leistungen
3 Dioden, 120° stromführend
Ûd = Û1 = √2 U1 = 1,41 U1
Ūd = Ûd 1,5 √3 / π = 1,17 U1
Ud = Ûd √(0,5 + √27 / (8 π)) =
1,19 U1
B6: Brückenschaltung
oft realisiert, für Drehstrom
6 Dioden, 120° stromführend
Ûd = √3 Û1 = √6 U1 = 2,45 U1
Ūd = Ûd 3 / π = 2,34 U1
Ud = Ûd √(0,5 + √27 / (4 π)) =
2,34 U1
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
4.2.1.
Seite 45/108
Transistorschaltungen
Für die Umformung von Gleichstrom in Wechselstrom mit Halbleiter gibt es
verschiedene Schaltungen mit Transistoren.
4.2.2.
Gleichstromsteller, Chopper
Für kleine Gleichstrommaschinen (bis 100 A) wird eine H-Brückenschaltung
verwendet. Damit das System den Antrieb bremsen kann, muss der von der Last
kommende Strom (Generatorbetrieb) im Zwischenkreis abgebaut werden können.
Dazu ist eine Bremswiderstand vorgesehen, welcher über einen Transistor
angesteuert wird.
Chopper oder H-Schaltung, nicht eingezeichnet der Einschaltwiderstand.
4.2.3.
Frequenzrumrichter
Für Asynchronmaschinen wird heute einen Spannungs-Zwischenkreis-Umrichter
verwendet. Damit das System den Antrieb bremsen kann, muss der von der Last
kommende Strom (Generatorbetrieb) im Zwischenkreis abgebaut werden können.
Dazu ist ein Bremswiderstand vorgesehen, welcher über einen Transistor
angesteuert wird.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 46/108
Frequenzrumrichter, nicht eingezeichnet der Einschaltwiderstand.
4.2.4.
Taktung und Ausgangsspannung
Die Transistoren werden nicht stufenlos sonder in wie Schalter angesteuert. Sie sind
entweder voll leitend oder gesperrt. Die Ausgangsspannung besteht aus
rechteckigen Spannungszeitflächen. Je länger die Schalter geschlossen sind, desto
höher wird der Mittelwert der Ausgangsspannung.
Es gibt 2 verschiedene Ansteuerarten:
Pulsumrichter
Beim Pulsumrichter, ist die Einschaltdauer konstant ist, aber die Einschalthäufigkeit
vom Sollwert abhängt, die Taktfrequenz ist hoch.
Ausgangsspannung eines Pulsumrichters mit 10 kH Taktfrequenz und 30%
Spannungssollwert.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 47/108
Ausgangsspannung eines Pulsumrichters mit 10 kH Taktfrequenz und 90%
Spannungssollwert.
PWM-Umrichter
Beim PWM-Umrichter (PulsWeiten Modulierte Umrichter) ist die Einschaltdauer vom
Sollwert abhängt, die Taktfrequenz ist tief. Dieser Umrichtertyp wird am häufigsten
eingesetzt.
Ausgangsspannung eines PWM-Umrichters mit 1 kH Taktfrequenz und 30%
Spannungssollwert.
Ausgangsspannung eines PWM-Umrichters mit 1 kH Taktfrequenz und 90%
Spannungssollwert.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
5.
Seite 48/108
Transformator
Der Transformator gehört zu den elektrischen Maschinen. Basis für das Verständnis
des Transformators ist die Induktion. Der Transformator ist zu
vergleichen mit einem Getriebe, welches hohe Drehzahlen
(Spannungen) in tiefe transformiert, dafür aber kleine
Drehmomente (Ströme) in hohe umwandelt. Das ganze kann
natürlich auch in die andere Richtung ablaufen. Vereinfacht
interessiert die übertragbare Scheinleistung S [VA] und das
Übersetzungsverhältnis ü [-]. Die Dimensionierung und
Messung von Transformatoren hat viele Ähnlichkeiten mit dem
Vorgehen bei elektrischen Maschinen, vor allem bei Asynchronmaschinen.
Die übertragbare Leistung eines Transformators ist bei gegebener Flussdichte und
Stromdichte proportional zur Eisenquerschnittsfläche und Kupferquerschnittsfläche.
Die Verluste eines Transformators bei gegebenen spezifischen Eisenverlusten und
Stromdichten proportional zum Eisen- und Kupfervolumen. Für geometrisch ähnliche
Transformatoren mit der Länge l ergeben sich folgende Grössengesetze:
Grösse
Abhängigkeit
Übertragungsleist
S~l4
ung
Transformatorver
Pv ~ l 3
luste
Transformatorobe
A~l2
rfläche
Konsequenzen
Die Übertragungsleistung steigt mit der 4. Potenz der
Abmessung (ein 100 MVA Transformator ist nur 10 mal
länger als einer für 10 kVA)
Je grösser ein Transformator ist, desto besser wird sein
Wirkungsgrad (bis 99,8%)
Je grösser ein Transformator ist, desto mehr Probleme
hat er mit der Abführung der Verlustwärme
Transformator und Ersatzschaltbild.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 49/108
5.1. Induktion
Wenn sich der magnetische Fluss ändert, wird in den Fluss umschliessenden
elektrischen Leitern eine Spannung induziert: u = dΨ/dt [V], wobei Ψ [Vs]
Flussverkettung (Windungszahl w [-] mal magnetischer Fluss Φ [Vs]) bedeutet.
Diesen Vorgang nennt man Induktion. Eine induzierte Spannung entsteht auch in der
Wicklung (Spule, Drossel bei einem Eisenkern), welche die Veränderung des
Magnetflusses verursacht (Selbstinduktion).
Ein veränderter Strom verursacht einer veränderte Durchflutung: dΘ/dt = w di/dt.
Diese veränderte Durchflutung verursacht über den magnetischen Widerstand Rm
[A/Vs] einen veränderten Fluss dΦ/dt = (dΘ/dt) / Rm. Genau dieser veränderte Fluss
verursacht auch eine induzierte Spannung u = w dΦ/dt in der anregenden Wicklung,
was zusammengerechnet die Funktion u = (w² / Rm) di/dt. Dabei ergibt sich die
Berechnungsgrundlage für die Induktivität L = w² / Rm [H (Henry) = Ωs], was die
Grundbeziehung für die Spannung über einer Induktivität u = L di/dt ergibt. Wenn der
Strom sinusförmig mit der Kreisfrequenz ω [1/s] ist i = Î sin(ω t) ergibt die Ableitung
di/dt = Î ω cos(ω t), das heisst, die induzierte Spannung über einer Spule ist
proportional zum Strom und zur Frequenz und eilt dem Strom um 90° voraus.
Transformiert in den Frequenzbereich lautet die Gleichung für die Induktivität U = jωL
I, mit U und I als Effektivwert und j als komplexer Zeiger.
Da eine Spule aus einem elektrischen Leiter aufgebaut ist, muss in der
Ersatzschaltung auch der ohmsche Widerstand R [Ω] dieses Leiters berücksichtigt
werden, als Seriewiderstand zur Induktivität.
Eine Luftspule und das Ersatzschaltbild.
Wenn zur Erhöhung der Induktivität Eisen als magnetischer Leiter verwendet wird
(Eisendrossel), so ist zu berücksichtigen, dass das Eisen selber auch elektrisch
leitend ist. Wie in der Spule werden auch im Eisen Spannungen induziert, welche im
Eisen Wirbelströme verursachen. Zusätzlich ergeben sich durch die
Flussänderungen im Eisen Hystereseverluste (auch Ummagnetisierungsverluste
genannt). Diese Eisenverluste sind abhängig vom Eisen, der Induktion und
Frequenz. Sie werden für den Nennstrom und die Nennfrequenz der Drossel mit dem
Ersatzwiderstand RFe [Ω] berücksichtigt. Es gibt auch ein kleinen magnetischen
Teilfluss Φσ, welcher nicht wie der Hauptfluss Φh durch das Eisen verläuft.
Zusätzlich ist zu berücksichtigen, dass das Eisen bei hoher Induktion (ab 1,8 T) in die
Sättigung gerät, das heisst die Induktivität mit zunehmendem Strom abnimmt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 50/108
Eine Eisendrossel und das Ersatzschaltbild mit Eisenverlusten und Streuung.
5.2. Eisenverluste
Bei magnetischen Wechselfeldern wie sie in elektrischen Maschinen vorkommen,
entstehen im Eisen Wärmeverluste. Man unterscheidet zwischen Wirbelstrom- und
Hystereseverlusten.
5.2.1.
Wirbelstromverluste
Wenn sich der magnetische Fluss ändert, wird in den Fluss ganz oder teilweise
umschliessenden elektrischen Leitern, auch dem Eisen, eine Spannung induziert.
Diese Spannung führt im Eisen zu Wirbelströmen, welche das Eisen aufheizen. Die
induzierte Spannung ist u = dΦ/dt = A dB/dt ~ A ω B, die Wirbelstromverlustleistung
ist Pw = u² / R ~ ω² B². Das heisst, die Wirbelstromverluste nehmen mit der
magnetischen Flussdichte und deren Frequenz quadratisch zu. Durch eine
Unterteilung der Eisenfläche in elektrisch von einander isolierte Bleche wird in den
einzelnen Elementen durch die geringere Fläche A [m²] weniger Spannung induziert
und der ohmsche Widerstand für den Wirbelstrom wird grösser. Durch diese
Aufteilung des Eisens in gestapelte Bleche (Laminierung) werden die
Wirbelstromverluste stark reduziert, dafür wird die magnetische Leitfähigkeit des
Eisens auch etwas reduziert, was mit dem Füllfaktor berücksichtigt wird.
Im laminierten Eisen (links) entstehen viel geringere Wirbelstromwärmeverluste als
im vollen Material (rechts).
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
5.2.2.
Seite 51/108
Hystereseverluste
Wenn Eisen ummagnetisiert wird, verlaufen die Magnetisierungskennlinien (B-HDiagramm) nicht auf der selben Bahn. Bei jeder Ummagnetisierung entstehen
spezifische Wärmeverluste [J/m³], welche dem Umlaufintegral auf der
Magnetisierungskennlinie entsprechen: Wh = ∫ H dB. Die sich ergebende
Hystereseverlustleistung ist Ph ~ ω B². Das heisst, die Hystereseverluste nehmen mit
der magnetischen Flussdichte quadratisch und deren Frequenz linear zu.
Bei der Ummagnetisierung von Eisen fallen bei jedem Zyklus Wärmeverluste
proportional zur Hysteresefläche an.
5.2.3.
Spezifische Eisenverluste
Die Eisenverluste sind schwierig vorauszuberechnen, da die lokalen
Flussverhältnisse sowie die Verarbeitung der Bleche die Werte beeinflussen. Weil
die Eisenverluste von der Veränderung der magnetischen Flussdichte abhängig sind,
werden spezifischen Werte pro kg Eisen für eine feste Flussdichte und Frequenz
angegeben. Je nach Eisenqualität und Blechdicke liegen die spezifischen
Eisenverluste zwischen 0,8 bis 12 W/kg bei einer Flussdichte von 1,5 T und einer
Frequenz von 50 Hz.
5.3. Dimensionierung von Transformatoren
Die Dimensionierung von Transformatoren erfolgt über die magnetische Flussdichte
B [T] im Eisen und die elektrische Stromdichte J [A/m²] im Leiter. Die dauernd
übertragbare Scheinleistung S [VA] ist Nennspannung U [V] mal Nennstrom I [A]. Die
Spannung und Frequenz f [Hz] ergibt die Anzahl Primärwindungen w1 [-] und den
Eisenquerschnitt AFe [m²].
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 52/108
Spannungsanpassung: Die induzierte Spannung in der Primärwicklung ist u1 =
dΨ/dt, die veränderte Flussverkettung ist dΨ/dt = w1 dΦ/dt, der veränderte Fluss ist
dΦ/dt = AFe dB/dt. Bei einem sinusförmigen Fluss ist die Ableitung von dB/dt = ω B.
mit ω [1/s] für die Netzdrehfrequenz (ω = 2π f). Daraus ergibt sich die Formel U1 =
w1 AFe B ω. Bei gegebener Flussdichte und Frequenz nimmt mit zunehmendem
Eisenquerschnitt die erforderliche Anzahl Primärwindungen ab, was sich gut auf die
Stromdichte in den elektrischen Leitern auswirkt. Je höher die Frequenz ist, desto
kleiner wird der Transformator, je grösser die Spannung ist, desto mehr Windungen
sind erforderlich.
Stromanpassung: Der Nennstrom ist I1 = ACu J / w1 mit der Stromdichte J [A/m²]
und dem zur Verfügung stehenden Querschnitt für die Leiter der Primärwicklung ACu
[m²]. Je mehr Windungen erforderlich sind, desto geringer wird der zulässige
Nennstrom. Wenn der zur Verfügung stehende Querschnitt vergrössert wird, nimmt
die Länge des magnetischen Flusses im Eisen zu, was dann oft mit einem grösseren
Eisenquerschnitt aufgeführt wird, was wiederum eine Anpassung der Windungszahl
erforderlich macht.
5.3.1.
Beispiel für eine Dimensionierung
Für den untenstehenden Transformator sind anhand der Konstruktion und
Nenndaten verschiedene Grössen zu berechnen:
Anzahl der Primär und Sekundärwindungen sowie der Drahtquerschnitt (Füllfaktor ff
= 0,5)
Die Grössen des Ersatzschaltbildes (Kupferwiderstand: ρCu(50°C) = 20 10-9 Ωm,
Eisenverluste bei 1,2 T und 50 Hz: γFe = 6 W/kg, Spezifisches Gewicht von Eisen:
ρFe = 7800 kg/m³, Streuung: σ = 1%)
Die Nennleistung, der Leerlaufstrom, der Wirkungsgrad bei voller und halber
Nennlast sowie der Kurzschlussstrom und die Kurzschlussspannung
Beispiel für eine Transformator-Dimensionierung.
Die Anzahl Primärwindungen ist: w1 = U1 / (AFe B ω) = 230 V / (0,0004 m² 1,2
Vs/m² 314 1/s) = 1526 => 1530
Der Leiterquerschnitt der Primärwicklung ist: AL1 = ff ACu / w1 = 0,5 0,0018 m² /
1530 = 0,588 10-6 m² => 0,5 mm² (für 1 A ausreichend)
Die Anzahl Sekundärwindungen ist: w2 = w1 U2 / U1 = 1530 12 V / 230 V = 79,8
=> 80
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 53/108
Der Leiterquerschnitt der Sekundärwicklung ist: AL1 = ff ACu / w1 = 0,5 0,0018 m²
/ 80 = 11,3 10-6 m² => 10 mm² (für 20 A ausreichend)
Daraus ergeben sich folgende Werte für das Ersatzschaltbild:
Widerstand der Primärwicklung: RCu1 = ρCu lL1 / AL1 = ρCu UL1 w1 / AL1 = 20 109 Ωm 0,20 m 1530 / 0,5 10-6 m² = 12,2 Ω => 12 Ω (bei etwa 50 °C)
Widerstand der Sekundärwicklung: RCu2 = ρCu lL2 / AL2 = ρCu UL2 w2 / AL2 = 20
10-9 Ωm 0,20 m 80 / 10 10-6 m² = 32,0 mΩ => 33 mΩ (inklusive Anschlüsse)
Induktivität der Primärwicklung: L1 = w1² / Rm = w1² / (lFe / (AFe μ0 μr)) = (1530)² /
(0,32 m / (0,0004 m² 1,26 μVs/Am 2000)) = 7,35 H => 7,4 H
Induktivität der Sekundärwicklung: L2 = w2² / Rm = w2² / (lFe / (AFe μ0 μr)) = (80)² /
(0,32 m / (0,0004 m² 1,26 μVs/Am 2000)) = 20,1 mH => 20 mH
Hauptinduktivität: Lh = L1 / (1 - σ) = 7,4 H (1 - 0,01) = 7.33 H => 7,3 H
Streuinduktivität der Primärwicklung: Lσ1 = L1 σ = 7,4 H 0,01 = 74 mH
Streuinduktivität der Sekundärwicklung: Lσ2 = L1 σ = 20 mH 0,01 = 0,20 mH
Eisenverluste: PvFe = γFe mFe = γFe ρFe lFe AFe = 6 W/kg 7800 kg/m³ 0,32
m 0,0004 m² = 5,99 W => 6 W
Ersatzwiderstand für die Eisenverluste: RFe = U1² / PvFe = (230 V)² / 6 W = 8,82 kΩ
=> 8,8 kΩ
Das Ersatzschaltbild für den Transformator hat 2 Unzulänglichkeiten:
keine galvanischen Trennung zwischen der Primär- und Sekundärwicklung
keine Transformation mit dem Übersetzungsverhältnis: ü = w1 / w2 = 1530 / 80 =
19,13. Das wird einem Hochkomma (') bei den Grössen auf der Sekundärseite
korrigiert:
U2' = U2 ü = U1 = 12 V 19,13 = 229,6 V => 230 V
I2' = I2 / ü = I1 = 20 A / 19,13 = 1,05 A => 1 A
RCu2' = RCu2 ü² ≈ RCu1 = 33 mΩ (19,13)² = 12,1 Ω => 12 Ω (Wenn für die
beiden Wicklungen der gleiche Füllfaktor möglich ist und der gleiche Raum zur
Verfügung steht)
Lσ2' = Lσ2 ü² ≈ Lσ1 = 0,20 mH (19,13)² = 73,2 mH => 74 mH
Z2' = Z2 ü²
(Für alle Impedanzen, welche an der Sekundärwicklung
angeschlossen werden)
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 54/108
Ersatzschaltbild mit den berechneten Werten.
Die Betriebsdaten rechnen sich aus:
Nennleistung: S2 = U2 I2 = 240 V 20 A = 240 VA (Die Transformatorbelastung
(zulässige Kupfer- und Eisenverluste) ist unabhängig von der übertragenen
Wirkleistung, somit ist die Nenngrösse eines Transformators die Scheinleistung, also
unabhängig vom Leistungsfaktor cosφ)
Leerlaufstrom durch die Hauptinduktivität: Iμ = U1 / jωLh = 230 V / (314 s-1 7,4 H) =
99,0 mA => 100 mA (Der Spannungsabfall über den Leiterwiderstand und die
Streuinduktivität ist im allgemeinen zu vernachlässigen (0,1 A 26 Ω = 2,6 V
gegenüber 230 V)
Leerlaufstrom durch den Ersatzwiderstand für die Eisenverluste: IFe = U1 / RFe =
230 V / 8,8 kΩ = 26,14 mA => 26 mA
Leerlaufstrom: I0 = IFe + jIμ = √((26 mA)² + (100 mA)² ) = 103,3 mA => 103 mA
(Der Magnetisierungsstrom durch die Hauptinduktivität ist dominant)
Verluste bei Nennstrom: Pv = PvFe + 2 PvCu1 = PvFe + 2 RCu1 I1² = 6 W + 2 12
Ω (1 A)² = 30 W
Wirkungsgrad bei Nennleistung: η = Pab / Pauf = P / (P + Pv) = 240 W / (240 W +
30 W) = 0,889 => 89% (Bei der Berechnung des Wirkungsgrades wird mit einer
ohmischen Last belastet, damit Wirkleistungen miteinander verglichen werden
können)
Verluste bei 50% Nennleistung: Pv50% = PvFe + 2 PvCu1 = PvFe + 2 RCu1 (I1
0,5)² = 6 W + 2 12 Ω (1 A 0,5)² = 12 W
Wirkungsgrad bei 50% Nennleistung: η50% = Pab / Pauf = P50% / (P50% + Pv50%)
= 120 W / (120 W + 12 W) = 0,909 => 91%
(Der Wirkungsgrad ist
belastungsabhängig, im Leerlauf ist der Wirkungsgrad 0%, weil keine Leistung
übertragen werden und die Eisenverluste doch vorhanden sind)
Kurzschlussstrom: I1k = U1 / (RCu1 + jωLσ1 + RCu2' + jωLσ2' ) ≈ U1 / (2 (RCu1
+ jωLσ1)) = 230 V / (2 √((314 s-1 0,074 H)² + (12 Ω)² )) = 4,4 A (Der
Kurzschlussstrom ist 4,4 mal grösser als der Nennstrom. Der Spannungsabfall über
die Streuinduktivität ist vor allem bei grösseren Transformatoren dominant)
Kurzschlussspannung: Uk = U1 I1 / I1k = 230 V 1 A / 4,4 A = 52 V => 23% (Das
heisst, dass bei einem sekundärem Kurzschluss und einer Eingangsspannung von
52 V der Nennstrom von 1 A fliesst)
Bei einem Primärstrom von 4,4 A ist die Sekundärspannung 0 V (Kurzschluss). Das
heisst, dass beim Nennstrom von 1 A die Sekundärspannung nicht 12 V sondern um
23% tiefer bei 9,3 V liegt. Damit die Sekundärspannung bei übertragener
Nennleistung den gewünschten Wert von 12 V hat, müssen mehr
Sekundärwindungen eingebaut werden. Wenn dieser Transformator mit einer
angepassten Sekundärwicklung im Leerlauf betrieben wird, liegt die Spannung an
den Sekundärklemmen bei etwa 15,6 V, das Übersetzungsverhältnis ü ist von 19,1
auf 14,8 gesunken.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 55/108
5.4. Messungen an Transformatoren
Die spezifischen Daten von Transformatoren können über Messungen oder über die
Nachrechnung der Konstruktion bestimmt werden.
5.4.1.
Abschätzung der Nenndaten
Wenn keine Nenndaten angegeben sind, kann bei einer angenommenen Frequenz
(z.B. 50 Hz) über die Aufnahme der Leerlaufkennlinie die Nennspannung
abgeschätzt werden. Dazu wird mit einer veränderlichen Wechselspannungsquelle
(Verstelltrafo, Variac) die Spannung von 0 V aus kontinuierlich erhöht und zusammen
mit dem Strom in einem Diagramm dargestellt. Meistens liegt die Nennspannung im
Übergang zur Sättigung. Der Nennstrom kann aus dem Leiterquerschnitt der
Primärwicklung abgeschätzt werden. Überschlagsmässig kann von etwa 10 A Strom
pro 1 mm² Leiterquerschnitt ausgegangen werden.
Auf der Leerlaufkennlinie dieses Transformators erfolgt der Übergang in die
Sättigung bei einer Spannung von etwa 230 V.
5.4.2.
Messungen
Die einzelnen Werte des Ersatzschaltbildes eines Transformators können mit
verschiedenen Messungen bestimmt werden.
Ersatzschaltbild eines Transformators.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 56/108
Widerstandsmessung
Der ohmsche Widerstand der Wicklungen RCu1 und RCu2 kann mit einem
Ohmmeter gemessen werden. Bei grösseren Transformatoren sind die
Widerstandswerte so klein, dass der Übergangswiderstand der Messklemmen eine
grosse Rolle spielt. Nebst der Verwendung einer Messbrücke kann man einen
Gleichstrom von zum Beispiel 1 A einspeisen und an den Transformatorklemmen die
Spannung messen. Bei der Widerstandsmessung ist zu beachten, dass
Temperaturkoeffizient von Kupfer 0,0039 1/K beträgt, bei 10 K Temperaturdifferenz
sind das fast 4%.
Leerlaufmessung
Bei offenen Sekundärklemmen wird an die Primärwicklung die Nennspannung
angelegt. Das Verhältnis der Primärspannung zur Sekundärspannung ergibt das
Übersetzungsverhältnis: ü = U1 / U2. Das Spannungsverhältnis im Leerlauf ist auch
das Verhältnis der Wicklungszahlen ü = w1 / w2
Der aufgenommene Leerlaufstrom I0 teilt sich auf in den Magnetisierungsstrom Iμ
und den Strom für die Eisenverluste IFe. Mit einer zusätzlichen
Leerlaufleistungsmessung P0 ≈ PvFe [W] können diese beiden Ströme
unterschieden werden: IFe = PvFe / U1 denn vor allem die Eisenverluste beziehen
Wirkleistung (die Wirkleistungsaufnahme der Primärwicklung kann bei kleinen
Leerlaufströmen im Verhältnis zum Nennstrom im allgemeinen vernachlässigt
werden. Bei relativ grossen Leerlaufströmen können die Kupferverluste mit PvCu1 =
RCu1 I0² von der Leerlaufleistung P0 abgezogen werden, der ohmsche Widerstand
RCu1 ist aus der Widerstandsmessung schon bekannt). Daraus lässt sich der
Ersatzwiderstand für die Eisenverluste berechnen: RFe = U1² / PvFe oder RFe = U1
/ IFe.
Mit der im Leerlauf aufgenommenen Blindleistung lässt sich nach dem gleichen
Verfahren wie beim Eisenwiderstand der Strom durch die Hauptinduktivität
berechnen: Iμ = Q0 / U1 und daraus die Primärinduktivität: L1 = U1 / (ω Iμ). Bei
vielen Transformatoren ist die Streuinduktivität Lσ1 sehr viel kleiner als die
Hauptinduktivität Lh, so dass L1 ≈ Lh gesetzt werden kann. Wenn keine
Blindleistungsmessung zur Verfügung steht, kann die Blindleistung aus der
Scheinleistung und Wirkleistung errechnet werden: Q0 = √(S0² - P0²).
Kurzschlussmessung
Bei kurzgeschlossenen Sekundärklemmen wird die Spannung an der Primärwicklung
soweit erhöht, bis der Nennstrom fliesst. Wenn die Nennspannung angelegt würde,
könnten die entstehenden Stromwärmeverluste in den Kupferdrähten den
Transformator zerstören. Je höher diese Spannung U1k im Verhältnis zur
Nennspannung U1 liegt, desto grösser ist die Streuung des Transformators. Je tiefer
die relative Kurzschlussspannung liegt, desto grösser wäre der Kurzschlussstrom:
I1k = I1 U1 / U1k. Der Strom, welcher über die Hauptinduktivität Iμ und den
Eisenwiderstand IFe fliesst, kann in den meisten Fällen vernachlässigt werden.
Zusätzlich liegt beim Kurzschluss nur etwa die halbe Eingangsspannung über diesen
beiden Impedanzen an. Der Kurzschlussstrom wird durch den ohmschen Widerstand
RCu und die Streuinduktivität Lσ der beiden Wicklungen begrenzt. Da bei der
üblichen Transformatorauslegung die Primärgrössen und transformierten
Sekundärgrössen etwa gleich gross sind RCu2' = RCu2 ü² ≈ RCu1 und Lσ2' = Lσ2
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 57/108
ü² ≈ Lσ1, ergibt sich folgende Formel: 2 (RCu1 + jωLσ1) = U1k / I1 und für die
gesuchte Streuinduktivität: Lσ1 = √((U1k / (2 I1))² - RCu1²) / ω. Bei grösseren
Transformatoren kann der Wicklungswiderstand oft vernachlässigt werden.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
6.
Seite 58/108
Synchronmaschinen
Die Synchronmaschine wurde früher fast ausschliesslich als Generator in
Elektrizitätswerken von 1 kW bis 1,7 GW eingesetzt. Als Motor findet sie durch den
Einsatz von Permanentmagneten für die Erregung und Leistungselektronik für die
Ansteuerung (elektronische Kommutierung) eine grosse Verbreitung als Servoantrieb
(von 1 W bis etwa 20 kW Nennleistung).
6.1. Synchronmaschine als Servoantrieb
Bei der Synchronmaschine befindet sich die Erregung im Rotor. Der Rotor dreht
synchron mit dem umlaufenden Feld des Statorstromes.
.
Schnitt
durch
einen
6-poligen Foto eines aufgeschnittenen 6-poligen
permanenterregten Synchronmotor.
Synchronmotors.
Die Drehmoment-Drehzahlkennline einer Synchronmaschine ist eine senkrechte
Strecke. Mit der Netzfrequenz ω [rad/s], der Polpaarzahl p [-] ergibt sich folgende
Beziehung für die Drehzahl: Ω = ω / p [rad/s]. Das Nennmoment Mn hängt von der
thermischen Möglichkeiten der Maschine ab. Bei einer Belastung über dem
Kippmoment Mk hat die Maschine kein Drehmoment mehr, kippt sie weg. Die
Synchronmaschine kann ohne Hilfe (Dämpferwicklungen ...) am Drehstromnetz nicht
selber anlaufen. Wenn der Rotor nicht mit der Statorfrequenz drehen kann (hohe
Beschleunigung oder zu hohes Lastmoment), fliessen in den Statorwindungen sehr
hohe Ströme. Der Synchronmotor kann daher nur bei einfachen Anwendungen
zusammen mit einem Frequenzumrichter betrieben werden.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 59/108
Die Drehmoment-Drehzahl-Kennlinie einer 2-poligen 3 kW Synchronmaschine am 50
Hz Netz.
In Anlehnung an die Kommutatormaschine lauten die Grundgleichungen für die
Synchronmaschine (oft auch bürstenlose Gleichstrommaschine genannt):
Formel
M~IΨ
U~ZI+ΩΨ
Ω=ω/p
Symbol
I
Ψ
Z
ω
f
Einheit
Nm
V
rad/s
Einheit
A
Vs
Ω
rad/s
Hz
Bezeichnung
Drehmoment
Spannung
Drehzahl
Bezeichnung
Strom
Flussverkettung
Statorimpedanz
Netzdrehfrequenz
Netzfrequenz
p
-
Polpaarzahl
Bemerkungen
Bemerkungen
R + jωL
ω = 2 π f (bei 50 Hz = 314 rad/s)
eine 2-polige Maschine hat die Polpaarzahl
1
Bei Servoantrieben wird durch einen Rotorlagegeber im Motor (zum Beispiel ein
Resolver) der Elektronik mitgeteilt, welche Windungsspule gerade im Magnetfeld ist
und eingeschaltet werden soll. Die Kommutierung erfolgt elektronisch (Transistoren
als Schalter). Je nach Kühlung, zulässiger Übertemperatur (dT) und nach der
maximalen Stromstärke des Ansteuergerätes ergibt sich für ein Servoantriebssystem
untenstehende Kennlinienfeld:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 60/108
Kennlinienfeld eines 7 Nm Servoantriebes mit Regelgerät.
Je höher die Drehzahl ist, desto grösser werden die Eisenverluste. Das
Motorgehäuse kann unabhängig von der Drehzahl nur eine bestimmte Verlustwärme
abführen, da die Kühlung bei Servoantrieben nicht über einen Lüfter auf der
Motorwelle erfolgt. Die zulässigen Verluste, welche aus der Belastung (Drehmoment)
des Antriebes entstehen, müssen somit reduziert werden. Dadurch nimmt das
Nennmoment mit zunehmender Drehzahl ab.
Es gibt auch Ansteuergeräte, welche Synchronmotoren ohne Sensoren betreiben
(Zum Beispiel durch die Erfassung der 3. Oberwelle). Für einen hochwertigen
Servoantrieb (Beherrschen von tiefen Drehzahlen, geringe Momentpulsationen ...) ist
aber eine Rückführung von Informationen über die Bewegung notwendig.
Typische Reglerstruktur für einen Servoantrieb.
Synchronmotoren mit Permanentmagneten sind für Drehmomente bis etwa 30 Nm
interessant. In Katalogen sind sehr selten Angaben über den Wirkungsgrad zu
finden. Obwohl im Rotor eigentlich keine Verluste entstehen sollten, werden die
Motoren durch Wärmeverluste im Eisen und den Magneten sehr heiss, vor allem bei
höheren Nenndrehzahlen.
6.2. Drehstrom
Drehstrom ist die Bezeichnung für 3-phasigen Wechselstrom, welcher weltweit für
grössere elektrische Leistungen zur Verfügung steht. Im Haushalt und für kleiner
Leistungen wird Wechselstrom verwendet. Als Zwischenform wird hier noch der
Zweiphasen-Wechselstrom und die Gleichstromübertragung erklärt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
6.2.1.
Seite 61/108
Einphasenstrom (Wechselstrom)
Der Wechselstrom steht an den üblichen Steckdosen im Haushalt zur Verfügung.
Aus dem Einphasennetz kann aber keine kontinuierliche Leistung bezogen werden.
Bei einer Netzfrequenz von 50 Hz pulsiert die Leistung mit 100 Hz. Viele
Eisenbahnnetze werden mit Einphasenstrom versorgt, damit nur 1 Fahrleitungsdraht
verwendet werden muss (Die Rückleitung erfolgt über die Schienen).
Formel
Einheit Bezeichnung Bemerkungen
S=UI
VA
Scheinleistung S² = P² + Q²
P = S cosφ W
Wirkleistung
Q = S sinφ VAr
Blindleistung Ar (kommt von Ampère reaktiv)
Û = √2 U V
Spitzenwert
Amplitude der Wechselspannung
Î = √2 I
A
Spitzenwert
Amplitude des Wechselstroms
Symbol
Einheit Bezeichnung Bemerkungen
U
V
Statorspannung Strangspannung (Phase -Null)
I
A
Statorstrom
Strangstrom
φ
Phasenwinkel Winkel zwischen Strom und Spannung
Schnitt durch eine einphasige 2-polige Ersatzschaltbild der Spannungsquelle mit
Synchronmaschine
Last.
Spannung an der Statorwicklung bei Spannung (50 Hz) und Leistung (100 Hz)
einer Drehzahl von 3000 U/min.
an der Statorwicklung bei einer
ohmschen Belastung mit 50 W.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
6.2.2.
Seite 62/108
Zweiphasenstrom
Der Zweiphasenstrom wird bei der Energieversorgung nicht verwendet. Er ist hier
aufgeführt, weil mit ihm auch kontinuierliche Leistung übertragen werden kann. Für
die Energieübertragung werden aber wie beim Drehstrom auch 3 Leiter benötigt,
wobei die einzelnen Leiter nicht gleichmässig belastet sind.
Formel
S=2UI
P = S cosφ
Q = S sinφ
Upp = √2 U
Symbol
U
I
Einheit
VA
W
VAr
V
Einheit
V
A
Bezeichnung
Scheinleistung
Wirkleistung
Blindleistung
Spannung zwischen 2 Phasen
Bezeichnung
Statorspannung
Statorstrom
φ
-
Phasenwinkel
Bemerkungen
S² = P² + Q²
Ar (= Ampère reaktiv)
Bemerkungen
Strangspannung (Phase -Null)
Strangstrom
Winkel zwischen Strom und
Spannung
Ersatzschaltbild
der
Schnitt
durch
eine Ersatzschaltbild
der beiden
verbundenen
zweiphasige
2-polige beiden Spannungsquellen Spannungsquellen
mit
Synchronmaschine.
mit Last.
Last.
Spannung (50 Hz) und Leistung (0 Hz)
an den Statorwicklungen bei einer
ohmschen Belastung mit je 50 W.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
6.2.3.
Seite 63/108
Dreiphasenstrom (Drehstrom)
Mit einer 3-phasigen Stromversorgung kann kontinuierliche Leistung übertragen
werden und die Übertragungsleitungen sind symmetrisch ausgelastet.
Formel
S = √3 U I
P = S cosφ
Q = S sinφ
Upp = √3 Upn
S = 3 Upn I
Symbol
Einheit
VA
W
VAr
V
VA
Einheit
Bezeichnung
Scheinleistung
Wirkleistung
Blindleistung
Spannung zwischen 2 Phasen
Bemerkungen
S² = P² + Q²
Bezeichnung
U = Upp
V
Nennspannung
Upn
I
V
A
Phasenspannung
Statorstrom
φ
-
Phasenwinkel
Bemerkungen
Strangspannung (Phase Phase)
Strangspannung (Phase -Null)
Strangstrom
Winkel zwischen Strom und
Spannung
Ar (= Ampère reaktiv)
Schnitt durch eine 3 einphasige 2-polige Synchronmaschinen, mit um 120°
verdrehten Statorwicklungen.
Spannung an den drei Statorwicklungen bei einer Drehzahl von 3000 U/min.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 64/108
Ersatzschaltbild der drei
Schnitt
durch
eine Ersatzschaltbild der drei verbundenen
dreiphasige
2-polige Spannungsquellen
mit Spannungsquellen
mit
Synchronmaschine.
Last und Rückleitern.
Last (.
Spannung an den drei Statorwicklungen in Spannung (50 Hz) und Leistung an den
einem Diagramm bei einer Drehzahl von Statorwicklungen bei einer ohmschen
3000 U/min.
Belastung mit je 50 W.
Spannung der Phase 1, der Phase 2
Phasenspannungen, welche um √3 höher ist.
GLOOR ENGINEERING, CH-7434 SUFERS
und
die
Differenz
der
beiden
16. April 2008
Elektrische Antriebstechnik
6.2.4.
Seite 65/108
Gleichstrom
Zur Ergänzung werden hier auch noch die Beziehungen bei Gleichstrom gezeigt. Mit
Gleichstrom kann kontinuierliche Leistung mit minimalem Leitungsaufwand
übertragen werden. Da grosse Generatoren Synchronmaschinen sind, grosse
Verbraucher Drehstrom benötigen und Wechsel- und Drehstrom einfach auf höhere
Spannungen transformiert werden können, werden Gleichstromsysteme nur bei
besonderen Aufgabensysteme (HGÜ) in grösseren Energiesystemen eingesetzt, wie
Kabel (Meer) über 100 km Länge und in sehr langen Freileitung über 1000 km.
Formel Einheit Bezeichnung
P=UIW
Wirkleistung
Symbol Einheit Bezeichnung
U
V
Spannung
I
A
Strom
Ersatzschaltbild.
Prinzipschaltbild HGÜ.
HGÜ = Hochspannungs-Gleichstrom-Übertragung. Die Spannung kann bis zu einem
MV betragen. Aufwendig sind die Konverter (AC/DC und DC/AC), welche in beide
Richtungen Energie übertragen können.
6.3. Synchrongeneratoren
Zur Umwandlung von mechanischer in elektrische Energie wird hauptsächlich die
Synchronmaschine verwendet. Die Erregung erfolgt mit Elektromagneten im Rotor.
Der erforderliche Gleichstrom wird über Schleifkontakte zugeführt. Man unterscheidet
zwischen 2 Maschinentypen:
Schenkelpolmaschine, ausgeprägte Pole, für tiefere Drehzahlen
Vollpolmaschine oder auch Turbogenerator genannt, Walzenläufer, für höhere
Drehzahlen
Schnitt
durch
Schenkelpolmaschine.
eine
2-poligeSchnitt
durch
Vollpolmaschine.
GLOOR ENGINEERING, CH-7434 SUFERS
eine
2-poligen
16. April 2008
Elektrische Antriebstechnik
6.3.1.
Seite 66/108
Stromortskurve
Je nach Antrieb oder Belastung und
Synchronmaschine am Netz der Statorstrom.
Erregerstrom
verändert
sich
bei
Stromortskurve einer Vollpol Synchronmaschine
Bei einer Übererregung (hoher Erregerstrom) wird die Synchronmaschine zur
Kapazität (Aufnahme von Blindleistung).
Symbol
U
I
Ie'
Ie0'
φ
Einheit
Bezeichnung
A
Grundbeziehung
V
A
A
A
-
Statorspannung
Statorstrom
Erregerstrom
Erregerstrom
Phasenwinkel
Polradwnkel
Bemerkungen
in dieser einphasigen Betrachtung Phase-Null
im Leerlauf
zwischen Statorspannung und Statorstrom
zwischen Rotor und Statorfeld
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
6.3.2.
Seite 67/108
Polzahl
Die Mechanische Drehzahl ist die elektrische Drehzahl durch die Polpaarzahl.
Schenkelpolmaschinen gibt es mit hoher Polzahl (Grössenordnung 100) für
Nenndrehzahlen bis in den Bereich von 60 U/min.
Schnitt
durch
eine
permanenterregte SM.
2-polige Schnitt
durch
eine
permanenterregte SM.
4-polige
6.4. Übung Synchronmaschine
6.4.1.
Fragen zur Stromversorgung
1.
Warum erfolgt die Elektrizitätsversorgung nicht mit Gleichstrom?
2.
Warum gibt es Drehstrom?
3.
Was für einen Leiterstrom muss eine 380 kV Drehstromleitung für eine
Scheinleistung von 1 GVA übertragen?
4.
Was für eine Wirkleistung bezieht eine Drehstromlast bei 400 V, 16 A und cosφ
von 0,9?
5.
Wie gross ist der Wirkleistungsbezug, der Leiterstrom I1 und die beiden Ströme
IR1 und IR2 in der Sternschaltung wenn die Widerstände R je 100 Ω haben?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 68/108
6.
Wie gross ist der Wirkleistungsbezug, der Leiterstrom I1 und die beiden Ströme
IR1 und IR2 in der Dreieckschaltung wenn die Widerstände R je 100 Ω haben?
7.
Was ist der Unterschied zwischen dem Nullleiter und der Erde?
8.
Wie hoch ist der maximale Spannungsmomentanwert zwischen einem Leiter
und der Erde (Annahme Erde = Nullleiter) bei einer 380 kV Freileitung?
9.
Was ist Blindleistung und was kann man dagegen tun?
10. Was ist Spitzenleistung und was kann man dagegen tun?
11. Was ist Wirkleistung und was kann man dagegen tun?
6.4.2.
Fragen zur Synchronmaschine
1.
Wie viele Pole hat ein 100 kVA Generator mit 12‘000 U/min für die 400 Hz
Elektrizitätsversorgung in eine Flugzeug?
2.
Was für eine Drehzahl hat ein 6-polige Generator für die Elektrizitätsversorgung
des Eisenbahnnetzes mit 16,6 Hz?
3.
Welches ist die höchste Drehzahl einer Synchronmaschine am 60 Hz Netz?
4.
Was für ein Drehmoment hat eine 4-polige 50 MW Synchronmaschine am 50
Hz Netz?
5.
Was bedeutet Inselbetrieb?
6.
Wie erfolgt die Netzsynchronisierung?
7.
Wie funktioniert eine bürstenlose Gleichstrommaschine?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
7.
Seite 69/108
Asynchronmaschinen
Der Asynchronmotor ist der am meisten verwendete Industriemotor. Er kann direkt
(mit Motorschutzschalter) ans Drehstromnetz angeschlossen werden und ist sehr
robust und einfach zu bauen. Grosse Asynchronmotoren haben einen guten
Wirkungsgrad. Wegen diesen guten Eigenschaften ist dieser Antrieb international
normiert und er wird auf der ganzen Welt in grossen Stückzahlen produziert.
Schnitt durch einen Asynchronmotor.
Foto eines Asynchronmotors.
Der Asynchronmotor hat seinen Namen von der Tatsache, dass er sich nicht genau
mit der Netzfrequenz dreht. Er hat nur ein Drehmoment, wenn seine Drehzahl von
der synchronen Drehzahl abweicht. Im Betriebsbereich ist das Drehmoment
proportional zu dieser Abweichung, welche als Schlupf bezeichnet wird. Die
Berechnung der Schlupfleistung kann grafisch erfolgen, die der Stromaufnahme nach
einfacher Geometrie und die des Drehmomentes ist komplex.
Drehmoment-Drehzahl-Kennlinie einer 2-poligen 3 kW Asynchronmaschine am 50
Hz Netz.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 70/108
Beim Asynchronmotor wird die Rotorspannung über das Statormagnetfeld induziert,
aus diesem Grund wird er auch Induktionsmotor genannt. In die Nuten des Stators
sind die Wicklungspakete eingelegt. Im Rotor ist beim Kurzschlussankermotor nur
ein Leiter pro Nut eingelegt oder eingegossen. Die Rotorleiter werden über je einen
Ring an den Stirnflächen des Rotors kurzgeschlossen. Es werden weder Bürsten
noch Magnete verwendet. Der Asynchronmotor wird direkt an das Drehstromnetz (3 *
400 V) angeschlossen. Für kleine Leistungen (unter 2 kW) kann der Asynchronmotor
mit einem Kondensator auch an das Wechselstromnetz (1 * 230 V) angeschlossen
werden. Für noch kleinere Leistungen gibt es den Spaltpolmotor (einphasiger
Asynchronmotor mit gespaltenem Stator), welcher einen schlechten Wirkungsgrad
hat.
7.1. Typenschild eines Asynchronmotors
1
2
3
4
5
6
Motorenwerke ACME EFF2
7
ASM 100L-2
0123456 8
∆ 400 V
5,9 A
9
3 kW
cosφ 0,86 10
2890 U/min
50 Hz
11
Isol. Kl. F
IP 44
12
Die einzelnen Eintragungen bedeuten:
Feld Symbol Bezeichnung
Bemerkungen
1
Hersteller
2
Motortyp
Typenbezeichnung des Herstellers, oft Baugrösse und Polzahl
3
U
Nennspannung es wird die verkettete Spannung angegeben
4
P
Nennleistung Zulässige dauernde mechanische Abgabeleistung
5
n
Nenndrehzahl Drehzahl bei der Belastung mit der Nennleistung
6
Isolationsklasse Temperaturfestigkeit der Wicklung
7
Effizienzklasse EFF1 ist am besten, ohne Bezeichnung EFF3
8
Serienummer
9
I
Nennstrom
Stromaufnahme bei Nennspannung und Nennbelastung
10 cosφ Leistungsfaktor Phasenwinkel bei Nennspannung und Nennbelastung
11 f
Nennfrequenz
12
Schutzklasse
Schutz gegen das Eindringen von Fremdkörper und Wasser
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 71/108
Aus diesen Daten lassen sich folgende Nenngrössen ableiten:
Formel
Einheit Bezeichnung
Beispiel
Bemerkungen
U/min Leerlaufdrehzahl 3000 U/min
aus der Nennfrequenz und
Polpaarzahl oder von der
Nenndrehzahl aufgerundet
rad/s
Nennwinkelgeschwindigkeit
Nm
Nenndrehmoment 9,9 Nm
9,9 Nm
W
Elektrische
Leistung
3515 W
3515 W
-
Wirkungsgrad
85,4%
Minimum für EFF2 ist 82,6%,
EFF1 86,7%
W
Nennverluste
515 W
Alle Verluste zusammen
Iw = I cosφ
A
Wirkstrom
5,1 A
Bei Nennspannung und
Nennbelastung
Im = I sinφ
A
Magnetisierungsst
3,0 A
rom
Ω = n π/30
302,6 rad/s
bei 50 Hz Netzfrequenz ein 2poliger Motor
Blindstrom
7.2. Grundgleichungen
Das Ersatzschaltbild der Asynchronmaschine ist sehr ähnlich dem eines
Transformators. Im Ersatzschaltbild wird als Last an den Sekundärklemmen ein
Widerstand eingesetzt, welcher vom Schlupf s [-] abhängig ist. Bei Drehzahlen um
die Leelaufdrehzahl Ω0 [rad/s] wird dieser Widerstandswert gross. Bei Drehzahlen
über der Leerlaufdrehzahl wird der Widerstandswert negativ, der Widerstand wird zur
Quelle. Die Leistung im Widerstand Rr (1-s)/s Ir² [W] im Widerstand entspricht der
mechanischen Leistung M Ω = M Ω0 (1-s) [W], das Drehmoment ist somit M = Rr Ir² /
(s Ω0) [Nm].
Ersatzschaltbild einer Asynchronmaschine. s = Schlupf
Aus
diesem
einphasigen
Grundgleichungen herleiten:
Formel
Ersatzschaltbild
lassen
sich
untenstehende
Einheit Bezeichnung
Bemerkungen
Nm
in Funktion der Statorspannung Us
Drehmoment
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Formel
Seite 72/108
Einheit Bezeichnung
Bemerkungen
Nm
Drehmoment
in Funktion des Statorstromes Is
1/s
Leerlaufdrehzahl
auch synchrone Drehzahl genannt
-
Schlupf
im Stillstand ist s = 1 im Leerlauf s =
0
Nm
Kippmoment
das maximale Drehmoment des Motors
im Betriebsbereich
-
Kippschlupf
der Schlupf, bei dem das Kippmoment
wirkt
-
Streuung
-
Rotorhilfswert drehzahlabhängig
Nm
Drehmoment
Formel von Kloss
Symbol Einheit Bezeichnung
Bemerkungen
Us
V
Statorspannung
Strangspannung (Phase -Null)
Is
A
Statorstrom
Strangstrom (Sternschaltung)
ωs
rad/s Statordrehfrequenz
ω = 2 π f (bei 50 Hz = 314 rad/s)
f
Hz
Statorfrequenz
üblicherweise 50 Hz, in Amerika 60 Hz
Rs
Ω
Statorwiderstand
bei grossen Motoren zu vernachlässigen
Lσs
H
Statorstreuinduktivität
Ls
H
Statorinduktivität
Ls = Lσs + Lh
Lh
H
Hauptinduktivität
gemeinsame Induktivität von Stator und Rotor
Ur
V
Rotorspannung
bei Kurzschlussankermotoren ist Ur = 0
Ir
A
Rotorstrom
ωr
rad/s Rotordrehfrequenz
im Stillstand ist ωr = ωs im Leerlauf ωr = 0
Rr
Ω
Rotorwiderstand
bei Industriemotoren schlupfabhängig
Lσr
H
Rotorstreuinduktivität
Lr
H
Rotorinduktivität
Lr = Lσr + Lh
m
Anzahl Phasen
üblicherweise 3 (für Drehstrom)
p
Polpaarzahl
eine 2-polige Maschine hat die Polpaarzahl 1
Ω
rad/s Drehzahl
3000 U/min sind 314 rad/s
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 73/108
Daraus ergibt sich untenstehende Kennlinie, wie sie bei Schleifringankermotoren
gemessen werden. Bei diesen wird über Schleifkontakte die Rotorwicklung
abgegriffen und an externe Widerstände oder Phasenanschnittgeräte
angeschlossen. Im Nennbetrieb sind die Rotorwicklungen intern oder extern
kurzgeschlossen.
Theoretische Drehmoment-Drehzahl-Kennlinie einer 2-poligen 3 kW 50 Hz
Asynchronmaschine.
7.2.1.
Stromverdrängungsläufer
Die Drehmoment-Drehzahl-Kennlinie eines Asynchronmotors mit einer runden
Leiterform im Rotor ist für den Netzbetrieb nicht universell geeignet, da das
Anlaufmoment (auch Anzugsmoment genannt) gering ist. Für den Betrieb mit
Frequenzumrichter wären runde Rotorleiter aber besser, aber solche Motoren sind
nicht Standard. Für ein hohes Anlaufmoment setzt man spezielle Leiterformen ein,
welche auch einen geringen Anlaufstrom ergeben.
Verschiedene Formen der Rotorläufer.
Bei hoher Rotorfrequenz (beim Anlauf) wird durch das wechselnde Magnetfeld des
Rotorstroms der Strom aus den inneren Zonen des Rotor Richtung Luftspalt
gedrängt (Stromverdrängung). Dadurch erhöht sich der Widerstand der
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 74/108
Rotorwicklung und der Kippschlupf wird grösser, was ein höheres Moment bei tiefen
Drehzahlen ergibt. Wenn der Motor in den Bereich der Nenndrehzahl gelangt, wird
die Rotorfrequenz immer kleiner (fast Gleichstrom) und die Stromverdrängung wirkt
kaum noch. Dadurch steht der ganz Rotorleiterquerschnitt zur Verfügung, was einen
geringen Widerstandswert und somit einen kleinen Kippschlupf ergibt. Durch die
steile Kennlinie läuft der Motor auf einer hohen Nenndrehzahl (geringer Schlupf) und
hat eine grosse Leistung und geringe Rotorverluste (hohen Wirkungsgrad). Beim
Rundstabläufer ist der Stromverdrängungseffekt gering, dafür hat er die beste
Nennleistung. Standardmotoren haben einen Hochstab- oder Doppelstabläufer. Es
gibt auch noch weitere Läuferformen wie der Tropfenstab und Keilstab. Die
Leiterformen bewirken untenstehende Drehmoment-Drehzahl-Kennlinien:
Drehmoment-Drehzahl-Kennlinien von 2-poligen 3 kW Asynchronmaschinen mit
unterschiedlichen Formen der Rotorleiter. Zusätzlich ist die Kennlinie eines Rotors
mit Magneten (SM) eingetragen.
7.2.2.
Vereinfachte Grundformeln
Für die Überprüfung von Asynchronmotoren können folgende vereinfachte
Beziehungen verwendet werden:
Formel
Einheit Bezeichnung
Nm
Drehmoment
Nm
Drehmoment
V
Spannung
Bemerkungen
das Drehmoment ist im Bereich der
Nenndrehzahl ungefähr das Produkt aus
Wirkstrom und Magnetisierungsstrom
das Drehmoment ist zwischen der Hälfte der
Kippmomente ungefähr das Produkt aus
Wirkstrom und Magnetisierungsstrom
die Spannung ist ist im Bereich der
Nenndrehzahl etwa proportional zum
Magnetisierungsstrom und zur Drehzahl
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Symbol
Einheit Bezeichnung
Iw
A
Im
A
Mn
sn
Nm
-
7.2.3.
Wirkstrom
Magnetisierungsstrom
Nennmoment
Nennschlupf
Seite 75/108
Bemerkungen
Iw = I cosφ kann über eine
Wirkleistungsmessung ermittelt werden
Im = I sinφ auch Blindstrom genannt
Nennleistung durch Nenndrehzahl in rad/s
Schlupf bei der Nenndrehzahl
Veränderung der Statorspannung
Beim Anlauf nimmt der Asynchronmotor sehr hohe Ströme auf. Um die Belastung
des Stromnetzes zu reduzieren wird der Motor bei grösseren Leistungen mit einer
tieferen Spannung angefahren. Mit dem Stern/Dreieck Anschluss liegen in der
Sternschaltung 400 V über zwei Windung an. Nach einer gewissen Zeit wird durch
einen externen Schalter in die Dreieckschaltung umgeschaltet und 400 V an eine
Windung angelegt. In der Sternschaltung hat der Motor nur ein Drittel des
Nenndrehmomentes. Auf dem Typenschild sind die erforderlichen Spannungen für
die Nennleistung in Dreieck und Sternschaltung angegeben (Nennspannung 400/690
V). Die hohen Anlaufströme und die mechanischen Anfahrstösse können auch mit
einem Sanftanlaufgerät reduziert werden. Der Softstarter (Phasenanschnittgerät zur
kontinuierlichen Spannungserhöhung) wird normalerweise nach dem Hochfahren
überbrückt.
Drehmoment-Drehzahl-Kennlinien einer 2-poligen 3 kW Asynchronmaschine mit
unterschiedlichen Statorspannungen. Das Drehmoment nimmt mit dem Quadrat der
Statorspannung zu. M ~ Us²
Motoren sind zur maximalen magnetischen Ausnützung des Eisens oft sehr knapp
ausgelegt. Das heisst, wenn sie mit einer zu hohen Spannung betrieben werden,
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 76/108
kommt das Eisen in die Sättigung und der Strom nimmt überproportional (hohe
Leerlaufverluste) zu. Industriemotoren werden oft knapp unter der Sättigungsgrenze
ausgelegt, eine höhere Betriebsspannung bewirkt eine überproportionale Zunahme
des Stromes, erhöht kaum das Drehmoment und kann den Motor zerstören.
Leerlaufstrom in Funktion der Spannung.
7.2.4.
Veränderung des Rotorwiderstandes
Für besondere Anwendungen (Aufzüge ...) werden auch Asynchronmotoren mit
einem hohen Läuferwiderstand (Rotorwiderstand) gebaut. Je höher der Widerstand
ist, desto mehr verschiebt sich das maximale Drehmoment (Kippmoment) zu tiefen
Drehzahlen.
Solche Widerstandsläufermotoren
haben
einen
schlechten
Wirkungsgrad und brauchen deshalb ein grosses Gehäuse, um die Verlustwärme
loszuwerden. Bei grösserer Leistung wird statt des Kurzschlussankers im Rotor eine
Drehstrom-Wicklung eingelegt, deren Enden über 3 Schleifringe von aussen
abgegriffen werden. Die Rotorleistung wird dann in externen Widerständen verheizt
(Anlaufwiderstände) oder über ein Steuergerät (Untersynchrone Kaskade) ins Netz
zurückgespiesen.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 77/108
Drehmoment-Drehzahl-Kennlinien einer 2-poligen 3 kW Asynchronmaschine mit
unterschiedlichen Rotorwiderständen. Der Kippschlupf nimmt mit dem
Rotorwiderstand proportional zu. sk ~ Rr Das Kippmoment Mk ist unabhängig vom
Rotorwiderstand.
7.2.5.
Veränderung der Statorfrequenz
Mit einem Frequenzumrichter kann die Statorspannung und Frequenz des
Asynchronmotors stufenlos verändert werden. Dadurch wird aus dem Standardmotor
ein drehzahlveränderliches Antriebssystem. Mit einem Rotorlagegeber, dem
Errechnen der Magnetisierung und dem Einprägen der entsprechenden Statorströme
(Vektorregelung) hat ein Asynchronmotor die Eigenschaften eines Servoantriebes.
Drehmoment-Drehzahl-Kennlinien einer 2-poligen 3 kW Asynchronmaschine mit
unterschiedlichen Frequenzen unter der Nennfrequenz. Die synchrone Drehzahl ist
proportional zur Frequenz. Ω0 ~ ωs. Unterhalb der Nennfrequenz muss die
Spannung wegen der Sättigung reduziert werden. Us ~ ωs
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 78/108
Bis zur Nenndrehzahl muss die Ausgangsspannung der Ausgangsfrequenz
angepasst werden, damit der Motor nicht in die Sättigung gelangt.
Wenn die Frequenz über die Nennfrequenz erhöht wird, was für den
Frequenzumrichter kein Problem ist, nimmt der Magnetisierungsstrom ab, da die
Ausgangsspannung normalerweise nicht über den Nennwert erhöht werden kann.
Wie bei der Gleichstrommaschine bei geschwächtem Erregerfeld nennt man diesen
Bereich Feldschwächbereich. Das Kippmoment fällt quadratisch mit der Frequenz,
das Nennmoment proportional zur Frequenz. Daraus ergibt sich ein Bereich
konstanter Nennleistungsabgabe, bis das Kippmoment kleiner als das Nennmoment
wird.
Drehmoment-Drehzahl-Kennlinien einer 2-poligen 3 kW Asynchronmaschine mit
unterschiedlichen Statorfrequenzen. Die synchrone Drehzahl ist proportional zur
Frequenz Ω0 ~ ωs. Das Kippmoment fällt über der Nennfrequenz im Quadrat zur
Frequenz. Mk ~ 1 / ωs²
7.2.6.
Veränderung der Streuung
Die standardisierten Asynchronmotoren sind für den Betrieb am Drehstromnetz
konstruiert.
Das
heisst,
sie
haben
ein
hohen
Anlaufmoment
(Stromverdrängungsnuten) und sind getrimmt auf einen möglichst niedrigen
Anlaufstrom (Kippmoment das 2 bis 3-fache des Nennmomentes). Auch
Asynchronmaschinen im Megawattbereich, welche in Einzelstücken hergestellt
werden, unterliegen dieser Orientierung am Netzbetrieb. Ein Antriebssystem,
welches aus einem Frequenzumrichter und einer Asynchronmaschine besteht, stellt
andere Anforderungen an den Motor.
Durch eine geschickte Konstruktion, welche die Streuung minimiert, kann das
Kippmoment sehr viel höher liegen. Dadurch kann der Asynchronmotor kurzzeitig ein
mehrfaches seines Nennmomentes abgeben, ohne überdimensioniert zu sein. Bei
Anwendungen, welche über einen weiten Bereich konstante Leistung benötigen
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 79/108
(spanabhebende Bearbeitung, Zentrumswickler, Traktion ...), erlaubt dieses hohe
Kippmoment einen grossen Feldschwächbereich, indem der Wirkungsgrad besser
als im Nennpunkt ist.
Drehmoment-Drehzahl-Kennlinien einer 2-poligen 3 kW Asynchronmaschine mit
unterschiedlichen Streuung. Das Drehmoment und der Anlaufstrom nehmen mit
abnehmender Streuung zu.
Am Beispiel einer streuarmen Asynchronmaschine ergeben sich beim Betrieb mit
einem Frequenzumrichter folgende Wirkungsgrade in Funktion der Drehzahl und
Belastung:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 80/108
Wirkungsgradfeld einer 4-poligen streuarmen 3 kW Asynchronmaschine mit einem
Frequenzumrichter zwischen 0 und 200 Hz.
7.3. Drehmomentberechnung der ASM
Die Berechnung des Drehmoments einer Asynchronmaschine erfolgt am einfachsten
über untenstehendes vereinfachtes einphasiges Ersatzschaltbild. Bei dieser
Berechnung werden die Sättigung, die Eisenverluste und die Stromverdrängung in
den Rotornuten vernachlässigt.
Vereinfachtes Ersatzschaltbild der elektrischen Kreise einer Asynchronmaschine.
Maschengleichung für den Statorkreis und den Rotorkreis
Us = Rs Is + j ωs Ls Is + j ωs Lh Ir
Ls = Lσs + Lh
Ur = Rr Ir + j ωr Lr Ir + j ωr Lh Is
Lr = Lσr + Lh
=0
Rotorwicklung kurzgeschlossen
.
Berechnung des Rotorstroms
Ir = - j ωr Lh Is / (Rr + j ωr Lr)
= - j ωr Lh Is x / (ωr Lr + j ωr Lr x) x = ωr Lr / Rr
= - j Lh Is x / (Lr (1 + j x)
= - j Lh Is x (1 - j x) / (Lr (1 + x²))
= - Lh Is x (j + x) / (Lr (1 + x²))
Einsetzen des Rotorstroms in die Maschengleichung des Statorkreises
Us = Rs Is + j ωs Ls Is - j ωs Lh Lh Is x (j + x) / (Lr (1 + x²))
= Rs Is + j ωs Ls Is - j ωs (1- σ) Ls Is x (j + x) / (1 + x²) σ = 1 - Lh² / (Ls Lr)
= (Rs + j ωs Ls + ωs (1- σ) Ls x (1 - j x) / (1 + x²)) Is
Berechnung der Wirkleistung des Statorkreises eines Stranges
Ps = Us Is*
Imaginärteil fällt weg
= (Rs + ωs (1- σ) Ls x / (1 + x²)) Is²
Berechnung der Verlustleistungen eines Stranges
Pv = Rs Is² + Rr Ir²
= Rs Is² + Rr (- Lh Is x (j + x) / (Lr (1 + x²)))²
= Rs Is² + (Rr Lh² x² (j + x)² / (Lr (1 + x²))²) Is²
= Rs Is² + (ωr Lh² x (j + x)² / (Lr (1 + x²)²)) Is² Rr = ωr Lr / x
= Rs Is² + (ωr (1- σ) Ls x (j + x)² / (1 + x²)²) Is² Lh² = (1 - σ) Ls Lr
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 81/108
= Rs Is² + (ωr (1- σ) Ls x (1 + x²) / (1 + x²)²) Is² Berechnung des Betrages
= (Rs + ωr (1- σ) Ls x / (1 + x²)) Is²
Berechnung der mechanischen Leistung eines Stranges
Pm = Ps - Pv
= (Rs + ωs (1- σ) Ls x / (1 + x²)) Is² - (Rs + (ωr (1- σ) Ls x / (1 + x²)) Is²
= ((ωs - ωr) (1- σ) Ls x / (1 + x²)) Is²
Berechnung der mechanischen Drehzahl, Definition des Schlupfes
Ω = (ωs - ωr) / p
p = Polpaarzahl (1 für 2-polig)
Ω0 = ωs / p
Synchrone Drehzahl (Leerlauf)
s
= ωr / ωs
Schlupf
= (Ω0 - Ω) / Ω0
Berechnung des Drehmoments aus dem Statorstrom
M = m Pm / Ω
m = Strangzahl (3 für 3-phasig)
M = m p (1- σ) Ls x / (1 + x²) Is² Drehmoment
Berechnung der Statorimpedanz
Zs = Us / Is
= Rs + j ωs Ls + ωs (1- σ) Ls x (1 - j x) / (1 + x²)
= (j (1 + x²) + (1- σ) x (1 - j x)) ωs Ls / (1 + x²)
= ((1- σ) x + j (1 + x² - (1- σ) x²)) ωs Ls / (1 + x²)
= ((1- σ) x + j (1 + σ x²)) ωs Ls / (1 + x²)
für Rs << ωs Ls
Zs² = ((1- σ)² x² + (1 + σ x²)²) ωs² Ls² / (1 + x²)²
= (x² - 2 σ x² + σ² x² + 1 + 2 σ x² + σ² (x²)²) ωs² Ls² / (1 + x²)²
= (1 + x²) (1 + σ² x²) ωs² Ls² / (1 + x²)²
= (1 + σ² x²) ωs² Ls² / (1 + x²)
Berechnung des Drehmoments aus der Statorspannung
M = m p (1- σ) Ls x / (1 + x²) Us² / Zs²
= m p (1- σ) Ls x / (1 + x²) Us² / ((1 + σ² x²) ωs² Ls² / (1 + x²))
M = m p (1- σ) x / (Ls (1 + σ² x²)) Us² / ωs²
Drehmoment
Berechnung des Kippmomentes und Kippschlupfes
M’ = dM / dx
~ 1 / (1 + σ² x²) - 2 σ² x² / (1 + σ² x²)²
0 = 1 + σ² x² - 2 σ² x²
Bedingung für Kippmoment
xk = 1 / σ
Mk = m p (1- σ) / (Ls σ (1 + σ² / σ²)) Us² / ωs² Kippdrehmoment
Mk = m p (1- σ) / (2 σ Ls) Us² / ωs²
Kippmoment
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
xk = ωrk Lr / Rr
ωrk = Rr / (σ Lr)
sk = Rr / (σ ωs Lr)
Seite 82/108
Rotorkippfrequenz
Kippschlupf
7.4. Luftspaltleistung
Wie bei der Kommutatormaschine errechnet sich die Luftspaltleistung (die Leistung
im Rotor) aus der Leerlaufdrehzahl mal das abgenommene Drehmoment. Die
mechanische Leistung Pm ist Drehmoment man Drehzahl und die Verlustleistung im
Rotor Pvr ist die Differenz aus der Luftspaltleistung und der mechanischen Leistung.
Formel
Einheit Bezeichnung
Bemerkungen
Pel = √3 U I cosφ W
Elektrische Leistung An den Klemmen
Pm = M Ω
W
Mechanische Leistung an der Welle
Pv = |Pel - Pm| W
Verlustleistung
im ganzen Motor
Pr = M Ω0
W
Luftspaltleistung
Leistung im Rotor
Pvr = M (Ω0 - Ω) W
Rotorverlustleistung nur im Rotor
Ω0 = ωs / p
rad/s Leerlaufdrehzahl
Synchrone Drehzahl
Symbol
Einheit Bezeichnung
Bemerkungen
M
Nm
Drehmoment
Ω
rad/s Drehzahl
955 U/min sind 100 rad/s
ωs
rad/s Statorfrequenz
50 Hz sind 314 rad/s
p
Polpaarzahl
4-polig ergibt 2
7.4.1.
Nennpunkt
Die Luftspaltleistung, die mechanische Leistung und die Verlustleistung im Rotor
lassen sich gut aus der Drehmoment-Drehzahl-Kennlinie ablesen:
Leistungsaufteilung im Nennpunkt bei 10 Nm Belastung. Die Luftspaltleistung beträgt
3,14 kW (314 rad/s mal 10 Nm), die mechanische Leistung 3 kW (300 rad/s mal 10
Nm), die Rotorverluste 0,14 kW (14 rad/s mal 10 Nm). Im Stator entstehen
zusätzliche Verluste, welche bei dieser Darstellung nicht herausgelesen werden
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 83/108
können. Bei diesem Motor fallen im Nennpunkt zusätzlich etwa 0,65 kW
Gesamtverluste (Rotor uns Stator) an. (Berechnung mit 400 V Spannung und 5,3 A
Wirkstrom, Werte aus Normmotoren)
7.4.2.
Teillast
Wenn der Antrieb nur mit dem halben Nennmoment belastet wird, so reduzieren sich
die Nennverluste im Rotor um den Faktor 4:
Leistungsaufteilung bei einer Belastung mit 5 Nm. Die Luftspaltleistung beträgt 1,57
kW (314 rad/s mal 5 Nm), die mechanische Leistung 1,53 kW (307 rad/s mal 5 Nm),
die Rotorverluste 0,035 kW (7 rad/s mal 5 Nm). Die Gesamtverluste (Stator und
Rotor) betragen etwa 0,33 kW. (400 V Spannung und 2,7 A Wirkstrom)
7.4.3.
Überlast
Wenn der Antrieb mit dem doppelten Nennmoment belastet wird, so erhöhen sich die
Nennverluste im Rotor um den Faktor 4:
Leistungsaufteilung bei einer Belastung mit 20 Nm. Die Luftspaltleistung beträgt 6,28
kW (314 rad/s mal 20 Nm), die mechanische Leistung 5,60 kW (280 rad/s mal 20
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 84/108
Nm), die Rotorverluste 0,68 kW (34 rad/s mal 20 Nm). Die Gesamtverluste (Stator
und Rotor) betragen etwa 1,3 kW. (400 V Spannung und 10 A Wirkstrom)
7.4.4.
Anlauf
Wenn der Antrieb blockiert ist oder anläuft, ist die ganze Luftspaltleistung
Verlustleistung im Rotor:
Leistungsaufteilung beim Anlauf mit einem Anlaufmoment von 20 Nm: Die
Luftspaltleistung beträgt 6,28 kW (314 rad/s mal 20 Nm), die mechanische Leistung 0
kW (0 rad/s mal 20 Nm), die Rotorverluste 6,28 kW (314 rad/s mal 20 Nm). Die
Gesamtverluste (Stator und Rotor) betragen etwa 7,5 kW. (400 V Spannung und 11
A Wirkstrom)
7.4.5.
Gegenstrombetrieb
Wenn der Antrieb gegen seine Drehrichtung angetrieben wird, so setzt sich die
Verlustleistung im Rotor aus der Luftspaltleistung und der mechanischen Leistung
zusammen:
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 85/108
Leistungsaufteilung bei einer Belastung mit 22 Nm im Gegenstromquadranten: Die
Luftspaltleistung beträgt 6,9 kW (314 rad/s mal 22 Nm), die mechanische Leistung
1,1 kW (50 rad/s mal 22 Nm), die Rotorverluste 8 kW (364 rad/s mal 22 Nm).
7.4.6.
Generatorbetrieb
Wenn der Antrieb über seiner synchronen Drehzahl von 3000 U/min angetrieben
wird, ist die Luftspaltleistung kleiner als die mechanische Leistung und die
Verlustleistung im Rotor ist die Differenz.
Leistungsaufteilung im Generatorbetrieb bei 10 Nm Antrieb. Die Luftspaltleistung
beträgt -3,14 kW (314 rad/s mal -10 Nm), die mechanische Leistung -3,28 kW (328
rad/s mal -10 Nm), die Rotorverluste 0,14 kW (-14 rad/s mal -10 Nm).
7.5. Datenblatt
Die folgenden Tabellen sind übliche Nenndaten von 2-poligen, 4-poligen, 6-poligen
und
8-poligen
der
international
standardisierten
Asynchronmotoren
(Käfigläufermotoren) für eine Nennspannung von 400 V und eine Nennfrequenz von
50 Hz. In einer eigenen Tabelle werden das Nenndrehmoment und die Nennleistung
der verschiedenen Motoren verglichen. Seit einigen Jahren gibt es
Asynchronmotoren (EFF1 und EFF2) mit besserem Wirkungsgrad.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
7.5.1.
Seite 86/108
2-polige Asynchronmotoren
Pn BG nn
ηn cosφn In
Mn Ma/Mn Ia/In Mk/Mn J
m
kW U/min % A
Nm Nm/Nm A/A Nm/Nm kgm²
kg
0.09 56
2745 61 0.81 0.26 0.32 2.0
3.7 2.0
0.00013 3.0
0.12 56
2745 64 0.81 0.33 0.41 2.1
3.9 2.1
0.00013 3.0
0.18 63
2740 64 0.81 0.50 0.62 2.3
4.0 2.3
0.00016 3.5
0.25 63
2765 66 0.81 0.67 0.86 2.3
4.3 2.3
0.00020 4.1
0.37 71
2765 66 0.79 1.02 1.3 2.3
4.3 2.3
0.00035 5.0
0.55 71
2800 71 0.81 1.38 1.9 2.3
4.9 2.3
0.00045 6.6
0.75 80
2850 74 0.84 1.74 2.5 2.4
6.0 2.3
0.00085 8.2
1.1 80
2850 77 0.85 2.42 3.7 2.6
6.1 2.3
0.0011 9.9
1.5 90S 2860 77 0.82 3.4 5.0 2.5
6.2 2.5
0.0015 12.9
2.2 90L 2860 82 0.85 4.6 7.4 2.8
6.8 2.8
0.0020 15.7
3
100L 2885 83 0.86 6.1 9.8 2.4
7.2 2.6
0.0038 21
4
112M 2895 84 0.88 7.8 13 2.4
7.6 2.8
0.0055 28
5.5 132S 2910 85 0.84 11.1 18 2.0
6.3 2.6
0.014 40
7.5 132S 2910 86 0.85 14.8 25 2.2
6.9 2.6
0.019 50
11 160M 2915 87 0.85 21.5 36 2.0
6.3 2.6
0.033 69
15 160M 2925 88 0.85 29 49 2.3
7.2 3.1
0.040 82
18.5 160L 2930 90 0.87 34 60 2.6
7.7 3.3
0.050 99
22 180M 2940 91.7 0.89 39 71 2.5
6.9 3.2
0.077 165
30 200L 2940 92.3 0.89 53 97 2.4
6.9 2.8
0.14
230
37 200L 2945 92.8 0.90 64 120 2.4
6.9 2.8
0.16
250
45 225M 2955 93.3 0.90 77 145 2.3
6.9 2.7
0.24
310
55 250M 2965 93.6 0.91 93 177 2.1
6.9 2.8
0.45
415
75 280S 2970 94.4 0.90 127 241 1.9
7.0 2.7
0.79
570
90 280M 2970 94.8 0.91 151 289 2.0
7.0 2.7
0.92
610
110 315S 2980 94.8 0.90 186 353 1.8
7.0 2.8
1.3
790
132 315M 2980 94.9 0.90 225 423 1.9
7.0 2.8
1.5
850
160 315L 2980 95.4 0.91 265 513 1.8
7.0 2.8
1.8
990
200 315L 2980 95.8 0.92 330 641 1.9
7.0 2.8
2.3
1100
250 355L 2982 96.1 0.92 410 801 1.6
7.0 2.8
3.3
1470
315 355L 2982 96.4 0.92 510 1010 1.6
7.0 2.8
4.0
1650
355 400L 2985 96.7 0.92 580 1140 1.6
7.0 2.8
6.2
2000
400 400L 2985 97.0 0.92 650 1280 1.6
7.0 2.7
6.8
2120
500 450 2986 96.5 0.92 810 1600 1.7
7.0 2.5
12
2920
630 450 2986 96.8 0.92 1020 2010 1.7
7.0 2.5
15
3250
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
7.5.2.
Seite 87/108
4-polige Asynchronmotoren
Pn BG nn
ηn cosφn In
Mn Ma/Mn Ia/In Mk/Mn J
m
kW U/min % A
Nm Nm/Nm A/A Nm/Nm kgm²
kg
0.06 56
1320 58 0.72 0.21 0.43 1.9
2.8 2.0
0.00027 3.0
0.09 56
1320 59 0.75 0.29 0.65 2.1
3.3 2.1
0.00027 3.0
0.12 63
1315 56 0.74 0.42 0.88 1.9
3.0 1.9
0.0003 3.5
0.18 63
1320 60 0.75 0.58 1.3 2.0
3.2 2.0
0.0004 4.1
0.25 71
1325 58 0.75 0.83 1.8 1.8
3.0 1.8
0.0006 4.8
0.37 71
1375 66 0.76 1.06 2.6 2.0
3.7 2.0
0.0008 6.0
0.55 80
1400 71 0.78 1.43 3.7 2.3
4.7 2.4
0.0015 8.0
0.75 80
1400 74 0.80 1.83 5.1 2.5
5.0 2.6
0.0018 9.4
1.1 90S 1410 74 0.81 2.65 7.5 2.1
5.0 2.5
0.0028 12.3
1.5 90L 1405 75 0.82 3.5 10 2.2
4.9 2.6
0.0035 15.6
2.2 100L 1415 79 0.82 4.9 15 2.2
6.0 2.6
0.0048 22
3
100L 1415 83 0.81 6.4 20 2.7
6.2 3.0
0.0058 24
4
112M 1435 83 0.80 8.7 27 2.8
7.0 3.0
0.011 29
5.5 132S 1450 85 0.83 11.3 36 2.4
6.9 3.3
0.023 42
7.5 132M 1450 87 0.83 15.0 49 2.7
7.7 3.3
0.028 53
11 160M 1455 88 0.85 21.2 72 2.4
7.1 2.9
0.05
73
15 160L 1455 89 0.85 28.6 98 2.8
7.7 3.2
0.07
90
18.5 180M 1460 90.5 0.84 35 121 2.3
7.0 3.0
0.13
165
22 180L 1460 91.2 0.85 41 144 2.3
7.0 3.0
0.15
180
30 200L 1465 91.8 0.86 55 196 2.6
7.0 3.2
0.24
240
37 225S 1475 92.5 0.86 67 240 2.5
7.0 3.1
0.44
300
45 225M 1475 93.1 0.87 80 292 2.6
7.0 3.2
0.52
330
55 250M 1475 93.8 0.87 97 356 2.7
6.7 2.5
0.79
435
75 280S 1480 94.5 0.86 133 484 2.5
6.7 2.7
1.4
610
90 280M 1480 94.7 0.86 160 581 2.5
6.8 2.7
1.6
660
110 315S 1485 94.7 0.86 195 707 2.5
6.7 2.7
2.2
830
132 315M 1485 95.3 0.87 230 849 2.5
6.9 2.7
2.7
910
160 315L 1485 95.7 0.87 275 1030 2.5
7.0 2.7
3.2
1060
200 315L 1485 95.9 0.87 345 1290 2.6
7.0 2.7
4.2
1200
250 355L 1488 96.2 0.88 430 1610 2.1
7.0 2.6
6.0
1590
315 355L 1488 96.3 0.88 540 2020 2.1
7.0 2.6
7.4
1790
355 400L 1490 96.3 0.88 600 2280 2.1
7.0 2.6
12
2120
400 400L 1490 96.5 0.88 680 2560 2.1
7.0 2.6
14
2260
500 450 1491 96.6 0.88 850 3200 2.1
7.0 2.6
19
3020
630 450 1491 96.8 0.88 1070 4040 2.1
7.0 2.5
24
3430
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
7.5.3.
Seite 88/108
6-polige Asynchronmotoren
Pn
BG nn
ηn cosφn In Mn Ma/Mn Ia/In Mk/Mn J
m
kW U/min % A Nm Nm/Nm A/A Nm/Nm kgm²
kg
0.037 56
830 36 0.62 0.24 0.42 2.0
2.0 2.0
0.00027 3.0
0.045 56
830 38 0.62 0.28 0.52 2.0
2.0 2.0
0.00027 3.0
0.06 63
830 38 0.66 0.35 0.7 1.8
2.0 1.8
0.0003 3.5
0.09 63
820 41 0.66 0.48 1.1 1.9
2.2 1.9
0.0004 4.1
0.18 71
830 54 0.67 0.72 2.1 1.9
2.3 1.9
0.0006 6.3
0.25 71
835 60 0.72 0.84 2.8 2.0
3.0 2.0
0.0009 6.3
0.37 80
905 62 0.72 1.20 3.9 1.9
2.3 2.0
0.0015 7.5
0.55 80
900 63 0.72 1.75 5.8 2.0
3.2 2.1
0.0018 9.4
0.75 90S 905 69 0.75 2.1 8.0 2.2
3.9 2.3
0.0028 12.5
1.1 90L 900 72 0.75 2.9 12 2.4
4.1 2.4
0.0035 15.7
1.5 100L 925 76 0.76 3.7 15 2.0
4.5 2.1
0.0063 22
2.2 112M 940 78 0.73 5.6 22 2.2
5.1 2.5
0.011 25
3
132S 945 79 0.75 7.3 30 2.0
4.7 2.2
0.020 38
4
132M 950 80 0.75 9.6 40 2.0
5.0 2.4
0.028 43
5.5 132M 950 83 0.76 12.6 55 2.2
5.4 2.5
0.035 51
7.5 160M 960 84 0.76 17.0 75 2.2
6.0 2.7
0.055 73
11 160L 965 88 0.76 23.7 108 2.5
7.0 3.0
0.080 99
15 180L 970 89 0.83 29.3 148 2.6
5.7 2.4
0.20
170
18.5 200L 975 90.2 0.83 35.7 181 2.6
5.7 2.3
0.29
220
22 200L 975 90.8 0.83 42.1 215 2.5
5.7 2.3
0.33
235
30 225M 978 91.7 0.85 56 293 2.6
5.7 2.2
0.57
305
37 250M 980 92.2 0.85 68 361 2.6
6.0 2.2
0.89
410
45 280S 982 92.7 0.86 81 438 2.5
6.0 2.3
1.3
540
55 280M 982 93.3 0.86 99 535 2.6
6.2 2.4
1.5
580
75 315S 985 93.7 0.86 134 727 2.5
6.0 2.5
2.4
770
90 315M 985 94.2 0.86 160 873 2.5
6.0 2.5
2.9
830
110 315L 985 94.5 0.86 195 1070 2.6
6.6 2.5
3.5
970
132 315L 986 94.9 0.86 235 1280 2.7
6.7 2.6
4.3
1060
160 355L 988 95.3 0.86 280 1550 2.1
6.7 2.3
6.0
1460
200 355L 988 95.6 0.86 350 1930 2.1
6.7 2.3
7.5
1580
250 355L 988 95.9 0.86 440 2420 2.2
6.8 2.3
9.1
1790
315 400L 990 96.2 0.86 550 3040 2.1
6.9 2.4
17
2250
400 450 992 96.4 0.86 700 3850 2.1
7.0 2.2
24
2990
500 450 992 96.6 0.86 870 4810 2.1
7.0 2.2
30
3380
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
7.5.4.
Seite 89/108
8-polige Asynchronmotoren
Pn
BG nn
ηn cosφn In
Mn
Ma/Mn Ia/In Mk/Mn J
m
kW
U/min % A
Nm
Nm/Nm A/A Nm/Nm kgm²
kg
0.09 71 630 56 0.67
0.35
1.4 1.7
2.4 1.7
0.0009
6.3
0.12 71 650 51 0.64
0.53
1.8 1.7
2.2 1.7
0.0009
6.3
0.18 80 675 50 0.62
0.84
2.5 1.7
2.4 1.8
0.0015
7.5
0.25 80 670 52 0.64
1.08
3.5 1.7
2.6 1.7
0.0018
9.4
0.37 90 S 665 63 0.75
1.13
5.3 1.4
2.8 1.7
0.0025 10.2
0.55 90 L 665 66 0.75
1.60
7.9 1.5
2.9 1.7
0.0035 13.2
0.75 100 L 675 70 0.75
2.06 10.6 1.6
3.5 1.8
0.0053 18
1.1 100 L 675 73 0.75
2.9
15.6 1.8
3.6 2.0
0.007
20
1.5 112 M 695 72 0.75
4.0
20.6 1.8
4.0 2.0
0.013
22
2.2 132 S 700 75 0.73
5.8
30 1.7
4.2 2.1
0.025
38
3 132 M 700 77 0.73
7.7
41 1.9
4.4 2.2
0.033
46
4 160 M 710 78 0.73 10.1
54 1.7
4.6 2.3
0.050
58
5.5 160 M 710 82 0.73 13.3
74 1.9
4.7 2.4
0.065
67
7.5 160 L 715 84 0.73 17.7 100 2.4
5.8 2.9
0.09
88
11 180 L 725 87 0.75 24.3 145 2.0
5.0 2.2
0.21
175
15 200 L 725 87.5 0.78 31.7 198 2.1
5.0 2.2
0.37
245
18.5 225 S 725 88.5 0.80 37.7 244 2.1
5.0 2.2
0.58
300
22 225 M 725 89.0 0.81 44
290 2.1
5.0 2.2
0.66
325
30 250 M 730 90.5 0.82 58
392 2.1
5.0 2.2
1.10
435
37 280 S 732 91.8 0.82 71
483 2.2
5.5 2.2
1.4
550
45 280 M 732 92.2 0.83 85
587 2.2
5.5 2.2
1.6
600
55 315 S 738 92.5 0.82 105
712 2.2
6.0 2.4
2.3
740
75 315 M 738 93.4 0.83 140
971 2.3
6.2 2.5
3.0
850
90 315 L 738 93.7 0.83 167
1170 2.3
6.2 2.5
3.6
990
110 315 L 738 94.1 0.83 205
1420 2.3
6.2 2.5
4.4
1100
132 355 L 738 94.6 0.82 245
1710 2.1
6.2 2.2
6.2
1440
160 355 L 738 94.8 0.82 300
2070 2.1
6.2 2.2
7.5
1580
200 355 L 740 95.2 0.82 370
2580 2.2
6.5 2.3
9.3
1790
250 400 L 742 95.8 0.82 460
3220 2.1
6.6 2.5
16
2200
315 450 743 95.9 0.82 580
4050 2.1
6.6 2.2
24
2970
400 450 743 96.2 0.82 730
5140 2.1
6.8 2.3
30
3350
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
7.5.5.
Seite 90/108
Einheiten
Symbol Einheit Bezeichung
Un
V
Nennspannung (400 V in Dreieckschaltung)
fn
Hz
Nennfrequenz (50 Hz)
Pn
kW
Nennleistung
BG
Baugrösse (Achshöhe in mm)
nn
U/min Nenndrehzahl
ηn
Wirkungsgrad bei Nennbelastung
cosφn Leistungsfaktor bei Nennbelastung
In
A
Nennstrom
Mn
Nm
Nenndrehmoment
Ma/Mn Nm/Nm Verhältnis Anlaufdrehmoment zu Nenndrehmoment
Ia/In
A/A
Verhältnis Anlaufstrom zu Nennstrom
Mk/Mn Nm/Nm Verhältnis Kippdrehmoment zu Nenndrehmoment
J
kgm² Polares Massenträgheitsmoment (Schwungmasse) des Rotors
m
kg
Masse (Gewicht) des Motors
Pvn
kW
Verlustleistung bei Nennbelastung (Mittelwert)
Anstelle des Ausdruckes Nennleitung, Nennstrom ... wird seit einigen Jahren der
Ausdruck Bemessungsleistung, Bemessungsstrom ... verwendet.
7.5.6.
Vergleich der Polzahl
Drehmoment-Drehzahl-Kennlinien von Asynchronmaschinen der Baugrösse 100L
(rund 20 kg schwer) mit unterschiedlichen Polzahlen. Die 6 und 8-polige Maschine
hat bedeutend weniger Kippmoment.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 91/108
Motorgrösse Nenndrehmoment Mn
Nennleistung Pn
BG m
Pvn 2-polig 4-polig 6-polig 8-polig 2-polig 4-polig 6-polig 8-polig
- kg kW Nm
Nm
Nm
Nm
kW
kW
kW
kW
56 3
0.07
0.4
0.7
0.5
0.12 0.09 0.045
63 4
0.13
0.9
1.3
1.1
0.25 0.18 0.09
71 6
0.17
1.9
2.6
2.8
1.8 0.55 0.37 0.25
0.12
80 10
0.29
3.7
5.1
5.8
3.5 1.1
0.75 0.55
0.25
90 15
0.42
7
10
12
8
2.2
1.5
1.1
0.55
100 22
0.53 10
20
15
16
3
3
1.5
1.1
112 26
0.70 13
27
22
21
4
4
2.2
1.5
132 42
0.93 25
36
30
30
7.5
5.5
3
2.2
160 95
1.7
60
98
108
100
18.5 15
11
7.5
180 175 1.9
71
144
148
145
22
22
15
11
200 240 2.5 120
196
215
198
37
30
22
15
225 320 3.0 145
292
293
290
45
45
30
22
250 420 3.4 177
356
361
392
55
55
37
30
280 610 4.4 289
581
535
587
90
90
55
45
315 1110 7.8 641 1290 1280 1420 200
200
132
110
355 1750 11
1010 2020 2420 2580 315
315
250
200
400 2200 13
1280 2560 3040 3220 400
400
315
250
450 3350 19
2010 4040 4810 5140 630
630
500
400
4, 6 und 8-polige holen etwa das gleiche Drehmoment aus einer gegebenen
Motorgrösse. 2 und 4-polige Motoren holen etwa die gleiche Leistung aus einer
gegebenen Motorgrösse. Bei einem Betrieb mit 100 Hz und entsprechend
angepasster Spannung oder Wicklung hätte ein 4-poliger Asynchronmotor doppelt
soviel Nennleistung als ein 2-poliger (Erklärung).
7.6. Nennwirkungsgrade
Bei den normierten Asynchronmotoren gibt es 3 Wirkungsgradklassen. Der nicht
näher bezeichnete Asynchronmotor gehört in die Klasse EFF3 und hat den
schlechtesten Wirkungsgrad. Die Motoren der Klasse EFF2 sollen Standard werden
und haben mindestens den Wirkungsgrad, wie er in der untenstehenden Tabelle
aufgeführt ist. Die besten Motoren haben die Klasse EFF1, für 2 und 4-poligen
Motoren gelten hier leicht unterschiedliche Werte.
Nennleistung
kW 1.1
EFF2 2+4-pol > 76
%
2-polig > 83
%
EFF1
4-polig > 84
%
1.5 2.2 3 4 5.5 7.5 11 15 19 22 30 37 45 55 75 90
79 81 83 84 86 87 88 89 90 91 91 92 93 93 94 94
84 86 87 88 89 90 91 91 92 92 93 93 94 94 95 95
85 86 87 88 89 90 91 92 92 93 93 94 94 94 95 95
Nennwirkungsgrade von 2 und 4-poligen Asynchronmotoren von 1,1 bis 90 kW
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 92/108
Nennwirkungsgrad von 2 und 4-poligen Asynchronmotoren.
Aus der Differenz der Nennverlustleistung kann die Energieeinsparung abgeschätzt
werden. Ein guter (EFF1) 11 kW Motor hat etwa 0,4 kW weniger Verluste, als ein
mittelmässiger (EFF2). Bei 4000 Jahresbetriebsstunden und einem Strompreis von
12,5 Rp./kWh ergibt sich eine jährliche Einsparung von 200 Franken. Ein EFF1 Motor
kostet etwa 200 Franken mehr, als ein 11 kW Standardmotor (rund 1000 Franken).
Der teurere Motor macht sich also schon nach einem Jahr Betrieb bezahlt.
Maximale Nennverlustleistung von EFF1 und EFF2 Motoren.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 93/108
7.7. Übung Asynchronmaschine
Eine 2-polige Norm-Asynchronmaschine der Baugrösse 280M hat folgende
Nenndaten: Pn 90 kW, nn 2970 U/min, Un 400 V, fn 50 Hz, In 155 A, cosφn
0,91, m 660 kg, J 0,92 kgm², Ma/Mn 2,0 Nm/Nm, Mk/Mn 2,7 Nm/Nm, Ia/In 7 A/A
1.
Skizzieren Sie die skalierte Drehmoment-Drehzahl-Kennlinie dieser Maschine
im Bereich von –500 U/min bis zu 4000 U/min und zeichnen sie den Nennpunkt
ein.
1.
Wie lange dauert etwa der Hochlauf der leeren Maschine bis zu Nenndrehzahl?
2.
Wie gross sind die Verluste im Nennpunkt, wie gross sind die Rotorverluste?
3.
Wie viel Verlustwärme (J) entsteht im Rotor beim Hochlauf der leeren
Maschine?
4.
Wie gross ist die Abgabeleistung bei einer Drehzahl von 2960 U/min?
5.
Wie gross ist das Drehmoment bei einer Drehzahl von 3015 U/min?
6.
Wie gross ist der Aufnahmestrom bei einer Abgabeleistung von 10 kW?
7.
Wie hoch ist der Leerlaufstrom beim Betrieb am 400 V, 60 Hz Netz?
8.
Wie gross ist das Anzugsmoment (Nm) in der Sternschaltung?
9.
Wie hoch ist das Kippmoment (Nm) bei 100 Hz (Frequenzumrichterbetrieb)?
10. Was ist Vektorregelung?
11. Skizzieren sie die Drehmoment-Drehzahl-Kennlinie bei einer Speisung mit
Gleichstrom und beschreiben sie stichwortartig das Betriebsverhalten.
12. Welche Verluste (Grundprinzip) entstehen wo in einer Asynchronmaschine?
13. Wie kann man den Wirkungsgrad verbessern?
14. Was kostet ein 10-jähriger Dauerbetrieb bei Nennleistung (Strom 12 Rp./kWh)?
15. Wie gross wären die Verluste bei einer EFF1 Maschine, wie gross die Energieund Kosteneinsparung (Aufgabe 14)?
16. Was für eine Frequenz und Ausgangsspannung (ohne Boost) ist für ein
Drehmoment von 200 Nm bei 600 U/min erforderlich?
17. Was ist zu beachten, wenn der 90 kW Frequenzumrichter 30 Ventilatoren mit 3
kW Leistung speisen soll?
18. Was passiert, wenn der Motor am 500 V Netz betrieben wird?
19. Welches sind die Vorteile der ASM gegenüber der GM?
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
8.
Seite 94/108
Reluktanzmaschinen
Beim Reluktanzmotor entsteht die Kraft im Luftspalt zwischen Eisen und Eisen
(Maxwellkraft).
Differenzielle Grundgleichungen für die Reluktanzmaschine (φ = Verdrehwinkel)
Es kann zwischen 3 Ausführungsarten unterschieden werden:
Reluktanzmotor: Ein Asynchronmotor mit Reluktanzmoment. Dabei handelt es sich
um einen Asynchronmotor, welcher einen Rotor mit ausgeprägten Polen hat. Bis in
die Nähe der Nenndrehzahl hat dieser Antrieb die Kennline eines Asynchronmotors.
Dann springt er in das Verhalten eines Synchronmotors. Dieser Antrieb hat einen
hohen Blindleistungsbedarf mit einem schlechten cos(j) und einem schlechten
Wirkungsgrad. Er ist nur für einfache Anforderungen geeignet.
Schrittmotor: Von einigen Watt bis zu einigen 100 Watt Leistung wird dieses
gesteuerte System bei Positionierantrieben (Drucker, Automaten ...) eingesetzt. Es
ist sehr günstig, hat einen schlechten Wirkungsgrad und ist für Anwendungen mit
geringen Störmomenten geeignet.
Switched reluctance drive (untenstehendes Foto): Wenn der Reluktanzmotor mit
einem Rotorlagegeber ausgerüstet wird, so spricht man von einem geschalteten
Reluktanzmotor, wobei vor allem der englische Begriff verwendet wird.
Foto eines Switched Reluctance Drives
Der Switched reluctance drive wird von einem Ansteuergerät gespiesen, welches
über Halbleiter-Schalter Strom in die Motorwicklungen fliessen lässt. Ein
Regelsystem, welches über Sensoren den Strom und die Rotorlage erfasst, steuert
die Schalter. Der Stator besteht aus bewickelten, ausgeprägten Polen. Die
gegenüberliegenden Spulen werden gemeinsam gespiesen und bilden eine Phase
mit Nord- und Südpol. Der Rotor ist eine einfache zahnradähnliche Konstruktion
ohne Magnete, Wicklungen und Bürsten.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 95/108
Schnitt durch einen Switched Reluctance Drive
Beim Einschalten der entsprechenden Statorwicklungen wirkt auf den Rotor ein
Drehmoment, welches von der magnetischen Anziehungskraft zwischen Stator- und
Rotorpol herrührt. Die Regelung sorgt anhand der Informationen vom Rotorlagegeber
dafür, dass die Spulen im richtigen Augenblick erregt sind, um das benötigte
Drehmoment auf die wirksamste Weise zu erzeugen. Bei tiefen Drehzahlen arbeitet
die Steuerung im "Choppermodus": In die Windungen wird ein Strom über einen
bestimmten Rotorwinkel eingeprägt. Bei höheren Drehzahlen arbeitet die Steuerung
im "Pulsmodus": In einer entsprechenden Rotorlage wird für eine bestimmte
Zeitspanne eine Spannung an die Windungen angelegt.
Ansteuerung für einen 3-phasigen Switched Reluctance Motor. Die Motorwicklungen
liegen (im Gegensatz zu einer ASM mit FR) zwischen den Schaltern.
Es ist die Flexibilität der Motorerregung, welche weitgehend die hervorragenden
Regeleigenschaften und den hohen Wirkungsgrad über einen grossen Drehzahl- und
Drehmomentbereich ermöglicht. Der Rotorlagegeber dient auch als Tacho.
Drehmoment und Drehzahl sind voll regelbar, was eine auf die Anwendung
optimierte "programmierbare" Drehzahl-Drehmoment-Kennlinie innerhalb des
jeweiligen Leistungsbereichs ermöglicht. Bisher konnten sich SR-Antriebssysteme
wegen der fehlenden Standardisierung erst in kundenspezifischen Massenprodukten
behaupten.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
9.
Seite 96/108
Motorentechnik
9.1. Aufbau von Elektromotoren
Die technische Grösse eines Motors ist mit dem Abstand (mm) von der Welle zur
Auflage definiert. Diese Distanz wird als Baugrösse bezeichnet. Für
Asynchronmotoren ist diese Grösse normiert (IEC-Normmotor). Beispiel: Ein Motor
der Baugrösse 100 hat einen Durchmesser von 200 mm.
Schnitt durch einen Elektromotor
Ein Elektromotor besteht im Wesentlichen aus folgenden 3 Teilen:
Stator: der feststehende elektromechanische Teil
Rotor: der rotierende elektromechanische Teil
Gehäuse, Lager, Achse und Kühlung
9.2. Technische Ausführung von Motoren
Toleranzen
Die elektromechanischen Angaben für einen Motor sind oft nur berechnet und
unterliegen wegen der Blechqualität Toleranzen. Es wird eine zulässige Abweichung
von ± 10% toleriert.
Beispiele: 91% Wirkungsgrad kann 90% bis 92% sein, 1450 U/min Nenndrehzahl
kann bei der Asynchronmaschine zwischen 1445 und 1455 liegen.
Leistungsreduktion
Bei Umgebungstemperaturen über 40 °C und Unterdrücken welche Höhenlagen von
über 1000 m ü. M. entsprechen muss der Motor deklassiert werden.
Bei einer Umgebungstemperatur von 50 °C ist eine Deklassierung um 8%, bei 60 °C
eine von 18% erforderlich. Auf der anderen Seite kann beim Betrieb bei einer
Umgebungstemperatur von 10 °C 16% mehr Drehmoment abgenommen werden, bei
20 °C sind es 11% und bei 30 °C noch 6%.
Bei Höhenlagen von 2000 m ü. M ist eine Deklassierung um 6%, bei 3000 m um 14%
und bei 4000 m um 23% erforderlich.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 97/108
Isolationsklasse
Die Isolationsstoffklasse beschreibt die zulässige Dauertemperatur der
Wicklungsisolation. Klasse B (130 °C) entspricht dem Standard. Klasse F (155 °C) ist
bei umrichtergespiesenen Motoren empfehlenswert. Klasse H (180 °C) ist nur in
besonderen Fällen erforderlich.
Schutzart
Die Schutzart (IP 12) kennzeichnet den Schutz eines elektrischen Gerätes gegen
das Eindringen von Fremdkörpern wie Finger, Staub usw. (erste Ziffer) und gegen
Wasser (zweite Ziffer). Die Schutzart nimmt keinen Bezug auf die Beständigkeit
gegenüber Lösungsmittel und Korrosion. Für die Schutzart ist die Wellendichtung die
kritische Stelle. Ein wasserdichter Motor braucht eine spezielle Dichtung, welche
regelmässig ersetzt werden müsste und eine relativ hohe Reibung (Verluste) hat. In
vielen Fällen genügt da auch eine Schleuderscheibe auf der Welle.
Explosionsschutz
Elektromotoren gibt es in unterschiedlichen Zündschutzarten (erhöhte Sicherheit "e",
druckfeste Kapselung "d"). Ein explosionsgeschützter Motor muss zusammen mit
dem entsprechenden Steuergerät (Beispiel: Frequenzumrichter) bescheinigt werden.
9.3. Thermische Antriebsauslegung
Bei der thermischen Antriebsauslegung geht es um die Überprüfung der zulässigen
Erwärmung des Antriebes. Wenn ein Antrieb nicht über sein Nennmoment oder nur
selten für kurze Zeit überlastet wird, so entfällt die thermische Antriebsauslegung.
Betriebsart
Bei allen Antrieben (auch beim Betrieb mit Regelgeräten) gilt vereinfacht die
Betrachtung, dass die Verlustwärme quadratisch zum Drehmoment M(t) anfällt und
dass der Antrieb dauend mit dem Nenndrehmoment Mn [Nm] belastet werden kann.
Daraus ergibt sich die Formel: t0 >= ∫ (M(t)/Mn)² dt. Die wichtige Grösse ist hier die
thermische Zeitkonstante t0 welche auch die Integrationszeit ist und die von der
Grösse des Motors abhängt. Bei Motorgewichten zwischen 5 und 20 kg liegt die
Zeitkonstante im Bereich von 10 Minuten.
Betriebsarten S6/15 bis S6/100 über 10 Minuten mit gleicher Antriebserwärmung.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 98/108
Betriebsart
Dauerbetrieb
S1
Kurzzeitbetrieb
Aussetzbetrieb, ohne Anlauf, ohne
Bremsung
Aussetzbetrieb, mit Anlauf, ohne
Bremsung
Aussetzbetrieb, mit Anlauf, mit
Bremsung
Durchlaufbetrieb mit
Aussetzbelastung
Reversierbetrieb
Durchlaufbetrieb mit
veränderlicher Drehzahl
S2
S3
S4
S5
S6
S7
S8
Zusatzbezeichnung
keine (ohne Angabe auf dem Typenschild gilt die
Betriebsart S1)
Betriebszeit (0,5 bis 90 min)
Einschaltdauer (15; 25; 40; 60%), Spieldauer (10
min)
Schaltspiele (60 ... 600 /h), Einschaltdauer,
Trägheitsfaktor
Schaltspiele (60 ... 600 /h), Einschaltdauer,
Trägheitsfaktor
Einschaltdauer (15; 25; 40; 60%), Spieldauer (10
min)
Schaltspiele (60 bis 600 /h), Trägheitsfaktor
Schaltspiele (60 bis 600 /h), Einschaltdauer,
Trägheitsfaktor
Betriebsarten von elektrischen Maschinen.
Hochlaufverluste
Der Rotor eines ungeregelter Antriebs (Gleichstrommotor, Asynchronmotor ...)
erwärmt sich beim Hochlauf mit einem Energieäquivalent W = ∫ R i² dt = m cp Δθ
(Rotorwiderstand R [Ohm], Rotorstrom i [A], Rotormasse m [kg], spezifische
Wärmekapazität cp [J/kg K], Temperaturunterschied Δθ [K]) der aufgebrachten
kinetischen Energie der bewegten Masse W = ½ J Ω ² (gesamte Schwungmasse J
[kgm²], Drehzahl Ω [rad/s]). Vor allem bei grossen Motoren können zu viele
Startvorgänge in kurzer Zeit zu einer Überhitzung führen.
Motorkühlung
Bei vielen Antrieben wie bei den industriellen Asynchronmotoren wird die Kühlung
mit einem auf der Motorwelle aufgebrachten Lüfter unterstützt. Wenn diese Antriebe
durch Regelgeräte längere Zeit bei Belastungen in der Nähe des Nennmomentes
und tieferen Drehzahlen als der Nenndrehzahl betrieben werden, so fördern diese
Lüfter zuwenig Luft zur Motorkühlung. Entweder muss der Motor überdimensioniert
werden oder die Motorkühlung sollte unabhängig von der Motordrehzahl sein
(Fremdlüfter, Wasserkühlung ...).
9.4. Zuverlässigkeit
Elektrische Antriebssysteme sind im Allgemeinen zuverlässige Systemkomponenten.
Folgende Kriterien bestimmen die Zuverlässigkeit:
Bei Kollektormaschinen (Gleichstrommotoren, Universalmotoren ...) liegt die
Bürstenstandzeit zwischen 20 und 8000 Betriebsstunden. Der Kollektor ist jeweils
auch zu überprüfen und gegebenenfalls zu revidieren.
Die Lager halten 10'000 bis 50'000 Stunden. Bei grossen und in unbeaufsichtigten
Anlagen installierten Antrieben werden die Lagervibrationen und Temperaturen
überwacht. Bei Riemenantrieben ist eine verstärkte Lagerung am Motor vorzusehen.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 99/108
Ein Flachriemen ist einem Keilriemen vorzuziehen. Der Riemen und die Spannung ist
regelmässig zu kontrollieren.
Bei der Verwendung von Motoren mit hohen Schutzarten (zum Beispiel: IP 56) ist die
Lagerdichtung nach den angegebenen Betriebsstunden auszuwechseln.
Die Leistungselektronik erreicht Ausfallraten von unter 1%. Nach 5 Jahren
Dauerbetrieb können die Kühllüfter ausfallen. Nach etwa 7 Jahren (je nach
Umgebungstemperatur) können die Elektrolytkondensatoren ausgetrocknet sein.
Nach 15 Jahren ist die Gefahr gross, dass beim Lieferanten niemand mehr das Gerät
kennt.
Wicklung (100'000 Stunden Lebensdauer bei Nennbetrieb). Überspannungsimpulse
im Motor zum Beispiel vom Frequenzumrichterbetrieb verursacht, können die
Wicklungsisolation schneller altern lassen, im Extremfall auf ein paar Stunden
hinunter.
Redundanz durch Installation eines zweiten zuschaltbaren oder mitlaufenden Motors.
Beim Betrieb mit Frequenzumrichter Installation einer automatischen Überbrückung
(vom Netz direkt auf den Motor, mit Schutzelementen) wenn es die Anwendung
zulässt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 100/108
10. Sondermaschinen
10.1. Unipolarmaschine
Die Unipolarmaschine wird in Labors als Hochstromgenerator für Gleichspannung
eingesetzt.
10.2. Gleichstrommaschine mit eisenlosen Anker
Dieser Maschinentyp wir auch Glockenankermotor genannt.
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 101/108
10.3. Scheibenläufer
10.4. Integralmotor
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 102/108
10.5. Reluktanzmotor
10.6. Asynchronmotor mit Permanentmagneten
10.7. Spaltpolmotor
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 103/108
10.8. Bürstenloser Gleichstrommotor
10.9. Schleifringloser Synchrongenerator
10.10. Stromrichtermotor
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 104/108
10.11. Schrittmotor
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 105/108
10.12. Switched Reluctance Drive
10.13. Magnetmotor
10.14. Transversalflussmaschine
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 106/108
10.15. Linearantrieb
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 107/108
10.16. Akuratoren
10.17. Piezomotor
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008
Elektrische Antriebstechnik
Seite 108/108
11. Zusammenfassung
Die verschiedenen Antriebssysteme kann man auf verschiedene Art gliedern:
Antriebsaufgabe: Arbeitsantrieb, Stellantrieb, Servoantrieb
Antriebsbeschreibung: gross, klein; schnell, langsam; …
Antriebsprinzip: Kommutatormaschine, Synchronmaschine, Asynchronmaschine,
Reluktanzmaschine, Sondermaschinen
Querschnitte
Gleichstrommotor
Asynchronmotor
Reluktanzmotor
Synchronmotor
Kennlinien
30
100
20
Drehmoment [Nm].
Drehmoment [Nm]
80
60
40
20
0
-20
-40
-1000
10
0
-10
-20
-30
0
1000
2000
3000
4000
-1000
0
1000
Drehzahl [U/min]
Drehmoment
Nennmoment
Anlaufmoment
2000
3000
4000
Drehzahl [U/min]
Drehmoment
Leerlaufdrehzahl
Nennmoment
Anlaufmoment
Kippmoment
Asynchronmaschine
Gleichstrommaschine
80
60
70
Drehmoment [Nm]
Drehmoment [Nm]
40
20
0
-20
60
50
40
30
20
10
-40
0
-60
-1000
0
0
1000
2000
3000
Nennmoment
Synchronmaschine
Kippmoment
1000
1500
2000
2500
3000
Drehzahl [U/min]
4000
Drehzahl [U/min]
Drehmoment
500
Konstante Leistung
Konstantes Drehmoment
Lineares Drehmoment
Quadratisches Drehmoment
Nenndrehzahl
Verschiedene Lastkennlinien
GLOOR ENGINEERING, CH-7434 SUFERS
16. April 2008