Elektrodynamik - Institut für Theoretische Physik
Werbung

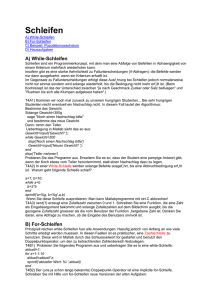
Vorlesungsmitschrift
Theoretische Physik III
Elektrodynamik
Dozent Prof. Dr. Ulrich Schwarz
WS 2014/15
Stand January 25, 2015
Universität Heidelberg
Institut für Theoretische Physik
Inhaltsverzeichnis
1 Elektrostatik
1.1 Notation . . . . . . . . . . . . . . . . . . . . . . .
1.2 Mathematischer Einschub 1: Vektorfelder . . . . .
1.3 Coulombgesetz und Feldgleichungen . . . . . . . .
1.4 Randwertprobleme und Greensche Funktionen . .
1.5 Numerische Loesung des Randwertproblems . . .
1.6 Entwicklung in spezielle Funktionen . . . . . . . .
1.7 Mathematischer Einschub 2: Fourier-Entwicklung
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
5
19
28
34
36
37
2 Magnetostatik
48
2.1 Stationaere Stroeme und Magnetfelder . . . . . . . . . . . . . . . . . . . 48
2.2 Die Feldgleichungen der Magnetostatik . . . . . . . . . . . . . . . . . . . 50
2.3 Lokalisierte Stromverteilungen . . . . . . . . . . . . . . . . . . . . . . . . 54
3 Elektrodynamik
3.1 Maxwell-Gleichungen . . . . . . . . . . . . . . . . .
3.2 Potentiale . . . . . . . . . . . . . . . . . . . . . . .
3.3 Einschub: Wellengleichungen . . . . . . . . . . . . .
3.4 Elektromagnetische Wellen (im Vakuum) . . . . . .
3.5 Energie und Impuls des elektromagnetischen Feldes
3.6 Dipolstrahlung . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
58
58
59
60
65
65
67
4 Elektrodynamik in Materie
72
4.1 Makroskopische Maxwellgleichungen . . . . . . . . . . . . . . . . . . . . . 72
4.2 Elektromagnetische Wellen in Materie . . . . . . . . . . . . . . . . . . . . 76
4.3 Optik: Brechung und Reflexion . . . . . . . . . . . . . . . . . . . . . . . 77
5 Kovarianz und Lagrangeformalismus
79
2
1 Elektrostatik
1.1 Notation
r1
x
• Ortsvektor: r = r2 oder y
r3
z
• Skarlarprodukt: a · b = |a| |b| cos (θ) =
X
ai bi = ai bi (Einstein Konvention)
i
• Linienintegral einer Funktion f entlang einer Raumkurve r (t) :
Z
f (r (t)) dt
R dφ
z.B. Kreislinie : L =
Z2π
dφ
dφR = 2πR
0
• Oberflaechenintegral einer Funktion ueber
eine Flaeche. u,v beschreiben die interZ
nen Koordinaten der Flaeche r (u, v) : f (r (u, v)) dudv
z.B. Kreisf laeche (u = φ, v = r) : A =
Z2π
0
3
dφ
ZR
0
rdr = πR2
z.B. Kugeloberf laeche : A =
Z2π
dφ
0
Zπ
R2 sin (θ) dθ = 4πR2
0
(u = φ, v = θ)
u
v
• Normalenvektor der durch t1 und t2 aufgespannten Tangentialebene:
n (u, v) =
t1 (u, v) × t2 (u, v)
∂r (u, v)
∂r (u, v)
, t1 =
, t2 =
|t1 (u, v) × t2 (u, v)|
∂u
∂v
b Rand von V, wobei V eine Punktmenge ist, z.B. V = Kugel und ∂V = Kugeloberflaeche.
• ∂V =
b zyklische Permutation
• z.P. =
• Partielle Ableitungen:
∂
∂ri
= ∂i ,
∂
∂ri0
= ∂i0
∂1
• Nabla-Operator: ∇ =
∂2
∂3
• Laplace-Operator: ∆ = ∂12 + ∂22 + ∂32 = ∂i ∂i , ∆0 = ∂i0 ∂i0
4
1.2 Mathematischer Einschub 1: Vektorfelder
Eine typische Anwendung von Vektorfeldern ist das Fliessen einer Fluessigkeit (Hydrodynamik). Man ist eventuell daran interessiert, wie viele Teilchen pro Zeit durch eine
Flaeche A gehen. Sei v(r) die Geschwindigkeit einer Fluessigkeit am Ort i.
• Im Folgenden Flaeche senkrecht zur Geschwindigkeit:
∆N = ρ∆V = ρA∆s = ρAv∆t ⇒
∆N
= ρv =: j ”Stromdichte”
∆tA
Der Gesamtstrom durch die Flaeche errechnet sich nun zu:
IA = jA = ρvA =
∆N
∆t
• Gekippte Flaeche:
θ
Charakterisiere die Flaeche durch den Vektor A mit |A| = A, A k n
⇒ IA = j · A, j := ρv
n
tu
tv
• Beliebige Flaechen:
r (u,v)
IA =
Z
j · dA =
A
Z
j · ndA ≈
N
X
ρv (ri ) · ni
i=1
∆Ai
("Riemannsche Diskretisierung des Integrals")
V
i nummeriert die Plaquetten, in die wir die Flaeche aufteilen. Im Folgenden
arbeiten
Z wir mit v als Beispiel fuer ein beliebiges Vektorfeld.
IA = v · dA ist dann ein Mass fuer die Durchdringung der Flaeche A durch das
A
Vektorfeld v (r).
5
Wir betrachten IA jetzt fuer geschlossene Flaechen A, die ein Volumen einschliessen.
Beispiel 1.
v ≡ const,
V = Quader mit Seitenlaengen a,b,c
Fluss von v durch die Flaeche A berechnet sich durch:
IA =
I
v · ndA ≈
6
X
v (ri ) ni Ai = vz ab − vz ab + vy ca − vy ca + vx bc − vx bc = 0
i=1
z
vz
c
b
y
a
vx
x
(v
(
vz
v = vy = const.
z
"Was reinkommt, geht auch wieder raus"
b const fuer beliebige geschlossene Flaechen.
Der Gesamtfluss IA verschwindet fuer v =
Der Beweis folgt spaeter.
Beispiel 2 (radialsymmetrisches Feld).
v := v (r) er
Wir berechnen den Fluss ueber eine Kugelflaeche mit Radius R
IA =
I
A
vdA =
I
A
v (r) er · er dA = v(R)4πR2
| {z }
=1
IA (R) ≡ const ⇒ v(R) ∼
1
R2
6
Wir wollen nun ein lokales Mass fuer die Durchdringung von geschlossenen Flaechen
bzw. ein Mass fuer die lokale Quelldichte eines Vektorfeldes definieren.
Definition (Divergenz des Vektorfeldes).
1 I
divv (r) := lim
v · dA
V →0 V
A=∂V
divv = 0 ⇒ v ist quellenfrei,
divv > 0 ⇒ es existieren Quellen,
divv < 0 ⇒ es existieren Senken.
Bemerkung. divv (r) ist ein skalares Feld
Im Folgenden berechnen wir die Divergenz mit Hilfe eines Quaders.
1
1 I
vdA =
[vx (x + ∆x, y, z) ∆y∆z − vx (x, y, z) ∆y∆z
divv =
V
∆x∆y∆z
A
+ vy (x, y + ∆y, z) ∆x∆z − vy (x, y, z) ∆x∆z
+ vz (x, y, z + ∆z) ∆x∆y − vz (x, y, z) ∆x∆y]
vx (x + ∆x, y, z) − vx (x, y, z) vy (x, y + ∆y, z) − vy (x, y, z)
=
+
∆x
∆y
vz (x, y, z + ∆z) − vz (x, y, z) V →0
+
−−−→ ∂x vx + ∂y vy + ∂z vz
∆z
= ∂i vi = ∇ · v
⇒ divv = ∇ · v
Beispiel.
• v ≡ const ⇒ divv = 0
• v = r ⇒ divv = ∇ · r = 3
• v=
r
r3
=
1 r
r2 r
=
(Solche Felder haben konstanten Fluss IA )
1
e
r2 r
Hier gilt fuer r 6= 0:
divv = ∇ · r = ∂x
=
=
x
(x2
1
3
2
3
+
−
3
x2x
+ z.P.
2 (x2 + y 2 + z 2 ) 25
+
z2) 2
+ z.P.
y2
(x2 + y 2 + z 2 )
3 (x2 + y 2 + z 2 ) − 3x2 − 3y 2 − 3z 2
5
(x2 + y 2 + z 2 ) 2
7
=0
Achtung: Fuer r = 0 ⇒ divv = ” 00 ” "nicht definiert!"
Wir moechten nun das Integral der Divergenz ueber ein Volumen V mit ∂V = A berechnen. Es gilt:
Z
divvdV = lim
N →∞
V
N
X
divv (ri ) ∆Vi = lim
N →∞
i=1
N I
X
i=1 A
vdA =
I
vdA
A
i
Bemerkung.
• Wir fuellen unser Volumen V mit hinreichend kleinen Quadern aus.
• Die Ai entsprechen den geschlossenen Oberflaechen dieser Quader.
• Alle internen Flaechenintegrale heben sich weg.
Die vorherige Rechnung begruendet den folgenden Satz:
Theorem (Integralatz von Gauss).
Fuer A = ∂V gilt:
I
v · dA =
A
Z
divvdV =
V
Z
∇ · vdV
V
Bemerkung. Es existieren Mengen V fuer die der Satz nicht gilt! V muss kompakte
Teilmenge des Rn mit stueckweise glattem Rand sein. Zusaetzlich muss das Vektorfeld in einer offenen Menge stetig differenzierbar sein. Wir werden in dieser Vorlesung
allerdings nur solche Faelle betrachten, die diese Vorraussetzungen erfuellen, da wir hier
physikalische Felder behandeln, die in dieser Hinsicht gut definiert sind.
Erste physikalische Anwendung:
Wir wenden den Satz von Gauss auf die Stromdichte j = ρv an:
⇒ IA =
I
A=∂V
j · dA =
Z
∇ · j dV 0 = −
V
| {z }
Z
d Z
ρdV 0 = (−ρ̇) dV 0
dt
V
=divj
V
b "Kontinuitaetsgleichung"
⇒ ∇ · j = −ρ̇ ⇒ ρ̇ + ∇ · j = 0 =
8
starke Wirbel
keine Wirbel
Neben der Quelldichte von Vektorfeldern ist eine weitere wichtige Eigenschaft ihre Wirbelstaerke (d.h. die Existenz von Zirkulationen). Wir moechten diese im Folgenden charakterisieren. Hierzu verwenden wir die Zirkulation entlang eines geschlossenen Weges C,
welcher eine planare Flaeche A mit Normalenvektor n berandet und betrachten den
Grenzuebergang A → 0. Dies motiviert die folgende
Definition (Rotation des Vektorfelds).
1 I
(rotv) n := lim
A→0 A
v · ds , f uer A k n
C=∂A
Bemerkung.
b Flaechennormale
• n=
b Linienelement
• ds = tds =
b Tangentialvektor
• t=
• Im Gegensatz zur Divergenz ist die Rotation kein skalares, sondern ein vektorielles
Vektorfeld, da sie abhaengig von der Flaechennormale n ist.
9
Behauptung: Ein dreidimensionaler Vektor (rotv) beschreibt vollstaendig alle moeglichen
Linienintegrale dieser Art. Man sagt die Darstellung ist koordinatenunabhaengig. Wir
rechnen dies exemplarisch nach:
z
D
nx
ny
n
cx
cy
y
B
cz
Weg C
nz
A
x
C=A→B→D→A
W eg
Wir zerlegen C in drei Teilwege, wodurch sich die Inneren Teile paarweise wegheben.
I
v · ds =
C
I
I
v · ds +
v · ds +
v · ds
Cz
Cy
Cx
I
Es sei Ax := A · ex = Acos (θx ) mit θx = ^ (A, ex )
Ay , Az seien analog definiert.
1
A→0 A
lim
I
v · ds = lim
A→0
C
cos (θx )
cos (θx ) Ax
t
cos (θx )
=
cos (θy )
cos (θz )
I
v · ds +
Cx
lim
Ax →0
lim
A →0
·
x
lim
Ax →0
1
Ax
Z
cos (θy )
cos (θy ) Ay
I
Cy
v · ds
1
v
·
ds
Ay
CZy
1
v
·
ds
A
CZx
z
Cz
= n · rotv
⇒ die kartesischen Komponenten genuegen.
10
v · ds +
cos (θz )
cos (θz ) Az
I
v · ds
Cz
Lemma (Rotation als Differentialoperator).
Fuer die Rotation gilt:
rotv = ∇ × v
(rotv)i = εijk ∂j vk
εijk
1, fuer positive Permutationen,
: = −1, fuer negative Permutationen,
0 sonst.
Beweis.
Man zeigt komponentenweise die Behauptung:
z
y
2
3
1
z
4
z
y
y
x
1 I
(rotv)x =
v · ds
∆y∆z
Cx
1
[vz (x, y + ∆y, z) ∆z − vz (x, y, z) ∆z + vy (x, y, z + ∆z) ∆y + vy (x, y, z) ∆y]
∆y∆z
vz (x, y + ∆y, z) − vz (x, y, z) vy (x, y, z + ∆z) − vy (x, y, z)
=
−
∆y
∆z
= ∂y vz − ∂z vy
=
Analog gilt:
(rotv)y = ∂z vx − ∂x vz
(rotv)z = ∂x vy − ∂y vx
11
Beispiel.
• Scherfluss
0
−a
az
⇒
rotv
=
∇
×
v
=
v=
0
0
0
Interpretation: Richtung und Betrag der Drehung eines Testteilchens.
• v ≡ const ⇒ rotv = 0
0
−y
x
• v = ⇒ rotv = ∇ × v = 0
2
0
z
y
x
0
• v = r radialsymmetrisch ⇒ rotv =
0
0
12
Fuer ein Vektorfeld ergeben sich also zwei wichtige abgeleitete Groessen:
Name
Bedeutung
Beispiel
Integraldarstellung
Divergenz
Quellendichte
x
v = y , divv = 3, rotv = 0
z
1 I
divv = lim
v · dA
V →0 V
Rotation
Wirbelstaerke
−y
0
v = x , rotv = 0 , divv = 0
0
2
1 I
(rotv)i = lim
v · ds
A→0 A
divv = ∇ · v = ∂i vi
rotv = ∇ × v = εijk ei ∂j vk
A=∂V
Differentialdarstellung
C=∂A
Akei
Theorem (Integralsatz von Stokes).
Ai
Z
rotv · dA ≈
Def.
rotv (ri ) · ni dAi =
N I
X
i=1
A
⇒
N
X
Z
Z
I
∇ × v · dA =
Weg C
v · ds
C=∂A
i
A
A
v · ds =
i=1 C
rotv · dA =
I
(∗)
(∗) "interne Strecken heben sich auf"
v · ds
C=∂A
Korollar.
• Fuer ein wirbelfreies Vektorfeld (rotv = 0) sind Linienintegrale wegunabhaengig,
d.h.
I
v · ds =
C
Z
Z
v · dr +
v · dr =
−C2
C1
Z
v · dr −
C1
Z
C2
v · dr =
Z
∇×v=0
A
P
C2
⇒
Z
v · dr =
C1
Z
C1
C
v · dr
C2
P0
Wir definieren in so einem Fall:
φ (r) :=
Zr
b (skalares) potential des Vektorfeldes
v · ds =
r0
13
• Wegen der Wegunabhaengigkeit ist φ (bis auf eine Integrationskonstante) eindeutig
bestimmt.
• Man kann φ und v wie folgt ineinander ueberfuehren:
dφ = ∂x φdx + ∂y φdy + ∂z φdz = ∇φ · ds
Δ
φ(r)
φ r)
Zr
⇒ φ (r) =
Zr
dφ =
ro
Zr
∇φ · ds =
ro
v r)
∀C
v dr
v · ds ⇒ v = ∇φ
ro
• Fuer den Wirbelfluss durch eine geschlossene Flaeche A = ∂V, C = ∂A = 0 (die
Randkurve wird auf einen Punkt zusammengezogen!) gilt:
I
v · ds = 0 =
C
I
(∇ × v) · dA
A
D.h. Der Wirbelfluss ∇ × v durch eine geschlossene Flaeche verschwindet fuer
jedes Vektorfeld v.
• Das gleiche Ergebnis liefert der Gauss’sche Satz:
I
(∇ × v) · dA =
Z
V
A
∇ · (∇ × v) dV = 0
|
{z
}
=εijk ∂i ∂j vk =0
Beispiel.
• radialsymmetrisches Vektorfeld: v (r) =
(∇ × v)x = ∂y
=
z
3
(x2 + y 2 + z 2 ) 2
1
e
r2 r
5
(x2 + y 2 + z 2 ) 2
−
r
e
r3 r
− ∂z
z − 32 2y
=
⇒ IA = 4π
y
3
(x2 + y 2 + z 2 ) 2
y − 32 2z
5
=0
(x2 + y 2 + z 2 ) 2
⇒ wirbelf rei ⇒ Potential existiert:
Zr
ro
14
Z
r r
1
1
1
·
dr
=
dr
=
−
−
r3 r
r2
r r0
φ
v(r)
Konvention: r0 = ∞
r
Probe: v = ∇φi , vi = ∂i − 1r = ∂i
1
=
1
(x2 +y 2 +z 2 ) 2
i
(−1)(− 12 )2ri
r3
=
i
r
r3
Theorem (1. Greenscher Satz).
a (r) = φ (r) · ∇ψ (r)
⇒ diva = ∇ · a = ∂i ai = ∂i (φ∂i ψ) = (∂i φ) (∂i psi) + φ(∂i ∂i ψ)
|{z}
=∆
⇒
Z
[(∇φ) · (∇ψ) + φ∆ψ] dV =
Z
∇ · adV =
V
V
I
φ∇ψ · ndA
A=∂V
Mit der Normalenableitung: ∇ψ · n = ∂n ψ = ∂i ψni = ni ∂i ψ = (n · ∇) ψ =: ∂n ψ
⇒
Z
I
[(∇φ) · (∇ψ) + φ∆ψ] dV =
V
φ∂n ψdA
b 1. Greensche Identitaet
=
A=∂V
Theorem (2. Greenscher Satz).
Aus dem 1. Greenschen Satz erhaelt man durch Vertauschen von φ ↔ ψ und Subtraktion:
⇒
Z
[φ∆ψ − ψ∆φ] dV =
V
z.B. φ = 1 ⇒
I
b 2. Greensche Identitaet
[φ∂n ψ − ψ∂n φ] dA =
A=∂V
Z
V
∆ψdV =
I
∂n ψdA
A=∂V
Theorem (Zerlegungs und Eindeutigkeitssatz).
Jedes Vektorfeld v (r) wird eindeutig durch sein Quellenfeld divv (r) und sein Wirbelfeld
rotv (r) bestimmt, sofern dieses stetig differenzierbar ist und im Unendlichen hinreichend
schnell abfaellt (mindestens wie r12 ).
Beweis. Wir fuehren den Beweis konstruktiv durch, d.h. wir konstruieren zunaechst
15
die Zerlegung und zeigen im Anschluss deren Eindeutigkeit.
v (r) :=
vD (r)
+
| {z }
vR (r)
| {z }
Divergenzanteil
Rotationsanteil
1 Z ∇ × v (r0 ) 0
vR (r) := ∇ ×
dV
4π 3 |r − r0 |
1 Z ∇ · v (r’) 0
vD (r) := ∇ −
dV
4π 3 |r − r’|
R
|
{z
R
}
|
:=α(r) =
b "skalares Potential"
{z
}
:=β(r) =
b "Vektorpotential"
Man sieht leicht ein, dass vD rotationsfrei und vR divergenzfrei sind, denn es gilt:
rotvD = ∇ × vD = ∇ × ∇α = εijk ∂j ∂k α = 0
divvR = ∇ · vR = ∂i εijk ∂j βk = εkij ∂i ∂j βk = 0
Die Zerlegung beruht im Wesentlichen auf den speziellen Eigenschaften der Funktion 1r !
Wir definieren:
1
1
f (r) := ∆ , r = |r| = x2 + y 2 + z 2 2
r
Und betrachten die speziellen Eigenschaften von f:
• Fuer r 6= 0 gilt f (r) = 0, denn:
2x
1
1
1
r
ri
2y
=
−∇
·
∆ =∇· ∇
=∇
=
−∂
i
r
r
2 (x2 + y 2 + z 2 )
r3
r3
2z
=
∂i vi
−
r3
• Falls 0 ∈ V gilt:
+
Z
− 32 ri 2ri
r5
=
3r 2
− 5
r
−
=r2
z}|{
3 ri ri
r5
=0
f (r) dV = −4π. Wir zeigen dies fuer eine Kugel K im
V
Ursprung:
Z
f (r) dV =
K
Z
V
=
Z
1
∇ · ∇ dV
r
Gauss
=
Z
A=∂K
1
∇
· dA
r
r r
1
· dA = − 2 4πR2 = −4π
3
r r
R
16
⇒
Z
(
f (r) =
−4π, falls 0 ∈ V
0,
sonst
V
Dies ist ein Beispiel fuer eine "Distribution" (→ Funktionalanalysis). Die "Delta-Funktion"
ist ebenfalls eine solche und definiert durch:
δ(x)
Z
δ (r) = 0, f uer r 6= 0,
δ (r) = 1, f uer 0 ∈ V
V
x
1
1
∆ = −4πδ (r) , wobei −
die "Greensche Funktion" fuer die Laplace-Gleichung ist.
r
4πr
Wir berechnen nun:
Z
Z
1
v (r0 )
1
vm (r0 ) 0
0
∇×∇
dV
=
ε
∂
ε
∂
dV
ijk
j
klm
l
4π
|r − r0 |
4π
|r − r0 |
V
V
i
Z
Z
1
vj (r0 )
vi (r0 )
∗ 1
0
dV
dV 0
=
∂i ∂j
−
∂
∂
i j
4π
|r − r0 |
4π
|r − r0 |
V
|
V
{z
}
(1)
|
{z
(2)
!
}
1 Z
1 Z 0
1
1
1
0
0
0
0
(1) =
∂i vj (r) ∂j
dV
=
−
∂
∂
v
(r
)
−
∂
v
(r
)
dV 0
i
j
j
j
j
0
0
4π
|r − r |
4π
|r − r |
|r − r0 |
V
V
1 I
Gauss
= −
4π
A=∂V
vj (r)
dAj − ∂i α (r) = −∂i α (r)
|r − r0 |
1 Z
1
vi (r0 ) ∆
(2) = −
dV 0 = vi (r)
0
4π
|r − r |
V
|
{z
}
=−4πδ(r−r0 )
∗ εijk εklm = εkij εklm = δil δjm − δim δjl
⇒ vi (r) = ∂i α (r) + A
Bleibt noch zu zeigen: A = ∇ × β (r)
17
Z
Z
v (r0 )
vk (r0 )
1
0
0
dV
=
ε
∂
dV
=
−ε
vk (r0 ) ∂j0
dV 0
ijk j
ijk
0
0
|r − r |
|r − r |
|r − r0 |
Z
4πβi (r) = ∇ ×
V
= −εijk
Z
0
= 0+
Z
V
!
vk (r )
1
+ ∂j0 vk (r0 )
dV 0
0
|r − r |
|r − r0 |
∂j
V
Gauss
V
!i
∇0 × v (r0 )
|r − r0 |
!
i
Damit ist die Konstruktion abgeschlossen. Wir muessen lediglich noch die Eindeutigkeit
beweisen. Hierzu nehmen wir an, es existieren zwei Vektorfelder die unsere Forderungen
erfuellen und folgern dass diese gleich sein muessen. Seien also v1 , v2 zwei Vektorfelder
mit
∇ · v1 = ∇ · v2 , ∇ × v1 = ∇ × v2
D = v1 − v2 ⇒ ∇ · D = ∇ · v1 − ∇ · v2 = 0, ∇ × D = ∇ × v1 − ∇ × v2 = 0
wirbelf rei
⇒
D = ∇ψ ⇒ ∇ · D = ∆ψ = 0
ψ ist das zu D gehoerende Potential. Insbesondere ist D quellen- und wirbelfrei. Mit
der 1. Greenschen Identitaet fuer φ = ψ folgt:
Z
2
0
ψ ∆ψ + (∇ψ) dV
|{z}
V
=0
Z
Im ∞ faellt alles ab
⇒
I
=
ψ∇ψ · dA = 0
A=∂V
(∇ψ)2 dV = 0 ⇒ ∇ψ = 0 = D
Korollar.
• Ein wirbelfreies Vektorfeld ist ein Gradientenfeld
• Ein quellenfreies Vektorfeld ist ein Wirbelfeld
• Im allgemeinen Fall haben wir eine Ueberlagerung der Form:
v = ∇α + ∇ × β
• Wichtige Eigenschaften des skalaren Potentials:
!
1 Z
∇0 v (r0 )
1 Z 0
0
∆α = −
∆
dV = −
∇ · ∇ (−4πδ (r − r0 )) dV 0
4π
|r − r0 |
4π
= ∇ · v (r) = ∆α
• Analog folgt fuer das Vektorpotential:
∆β = −∇ × v (r)
18
1.3 Coulombgesetz und Feldgleichungen
Experimentelle Grundlagen:
• Die Coulombkraft ist eine Zentralkraft, die quadratisch mit dem Abstand abfaellt. Experimentell
bestaetigt von 10−12 m bis 108 m =
b 20 Groessenordnungen.
• Die Coulombkraft ist proportional zu den elektrischen Ladungen q1 und q2 . Gleichartige Ladungen stossen sich ab, gegengesetzte ziehen sich an (Im Gegensatz zur Gravitation!). ⇒ F (r1 , r2 ) =
−r2
kq1 q2 |rr1−r
|3
1
2
• Die Wechselwirkungsstaerke k haengt vom Masssystem (bzw. von der Einheit der Ladungen) ab.
Zwei Standardsysteme
• SI-System (oder MKSA): A (Ampere) fuer Stromstaerke ist die fundamentale Einheit. 1A = Cs
mit C fuer Coulomb. Praktisch wird A definiert fuer die Stromstaerke in zwei parallelen Leitern
N
mit Abstand 1m, die sich mit der Kraft 2 · 10−7 m
anziehen.
Elektronenladung:
ρ = 1, 6 · 10−19 C
∗
k = 10−7
N c2 ∗∗ 1
≈
A2
4πε0
* Magnetostatik, c =
b Lichtgeschwindigkeit
** ε0 Dielektrizitaetskonstante des Vakuums
In vielen Buechern: F = 4πε1 0 ε qr1 q22 (z.B. Nolting, typisch fuer Experimentalphysik)
• Gauss-System (oder CGS): Die Ladungseinheit wird so gewaehlt, dass k = 1. Ausserdem
wird Laenge in cm und Kraft in dyn = 10−5 N gemessen. Die Ladungseinheit heisst esu fuer
1/2
3/2
electrostatic unit mit esu = dyn1/2 cm = g cm
s
Die Elektronenladung ist hier: e = 4, 8 · 10−10 esu, esu = 3, 3 · 10−10 C (z.B. Fliessbach, typisch
fuer theoretische Physik)
Vergleich zur Gravitation:
• Die Abstandsabhaengigkeit ist die Gleiche, allerdings ist diese bei der Gravitation deutlich
schwaecher. Fuer ein Proton und ein Elektron im Abstand im Bohrradius 0,53Å gilt:
FC = 8 · 10−8 N
FG = 4 · 10−47 N
Dies entspricht einem Unterschied von 39 Groessenordnungen! Aber: auf grossen Skalen heben
sich negative und positive elektrische Ladungen auf und die Gravitation dominiert!
• Elektrische Ladungen koennen sich gegenseitig schwaechen ("Abschirmung" oder "Screening").
Ab jetzt gelte: k = 1
Experimentelle Beobachtung: Die Coulombkraft fuer mehrere Ladungen kann einfach
aufsummiert werden (Superpositionsprinzip):
F (r) =
N
X
i=1
qqi
r − ri
b "Testladung"
=: qE (r) , q =
|r − ri |3
Hierbei entspricht E der elektrischen Feldstaerke (auch elektrisches Feld oder E-Feld).
19
Beispiel.
• Punktladung
q
• Zwei Punktladungen
q
q
q
-q
Typischerweise betrachtet man N 1 ⇒ Kontinuumsbeschreibung
∆Q
Ladungsdichte ρ (r0 ) = ∆V
auf einer Skala von 100Å
⇒ E (r) =
Z
ρ (r0 )
r − r0
dV
|r − r0 |3
Andere Richtung: ρ (r) =
N
X
qi δ (r − ri ) ⇒ E (r) =
i=1
i=1
⇒ E (r) = −∇
Z
N
X
qi
r − r0
|r − r0 |3
ρ (r’)
b (skal.) elektr. Potential, bis auf k ∈ R eindeutig
dV 0 , φ (r) =
0
|r − r |
|
{z
φ(r)
}
⇒ E (r) = −∇φ (r)
E ist ein Gradientenfeld, d.h. es gilt: rotE = 0. Wir berechnen die Divergenz:
divE = ∇ · E = −∆φ = −∆
Z
Z
ρ (r’)
0
ρ (r’) (−4π)δ (r - r’) dV 0 = 4πρ (r)
dV
=
−
|r − r0 |
Somit erhalten wir die Feldgleichungen der Elektrostatik, der Spezialfall der MaxwellGleichungen fuer B = 0 und ∂t E = 0:
rotE = ∇ × E = 0
divE = ∇ · E = 4πρ (r)
Oft ist es viel einfacher mit φ statt mit E zu arbeiten (eine statt drei Komponenten).
20
Es gilt:
∇ · E = ∆φ = −4πρ
Dies ist die Grundgleichung der Elektrostatik ("Poisson-Gleichung"). Sie ist
eine in φ lineare, inhomogene, partielle Differentialgleichung 2. Ordnung.
Im Prinzip ist die Loesung das Poisson-Integral:
φ (r) =
ρ (r’)
dV 0
|r − r0 |
Z
Aber: meistens hat man Randwertprobleme.
Feldgleichungen in integraler Form:
∇ · E = 4πρ ⇒ IA =
I
Gauss
E · dA =
Z
∇ · EdV 0 = 4π
V
A=∂V
Z
ρdV 0 = 4πQ
V
⇒ Gauss Gesetz: Der Gesamtfluss eines Vektorfeldes E durch eine geschlossene Flaeche
A ist gleich 4π mal der eingeschlossenen Ladung Q.
∇×E=0⇒
Z
I
Stokes
(∇ × E) · dA =
A
E · ds = 0
C=∂A
Linienintegrale sind wegunabhaengig, es gibt keine geschlossenen Feldlinien.
Wir berechnen die Energie des elektrostatischen Feldes. Hierzu bewegen wir eine
Testladung q von r1 nach r2 . Dafuer muss Arbeit geleistet werden. Wir nehmen hier
an, dass die Bewegung von q das elektrostatische Feld nicht veraendert:
W12 = −
Zr2
r1
F · dr = −q
Zr2
E · dr = q
r1
Z
r2 ∇φ · dr
r1
⇒ W12 = q [φ (r2 ) − φ (r1 )]
Die elektrostatische Arbeit entspricht genau der Potentialdifferenz (oder "Spannung"
V). Fuer positives W12 wird Energie gespeichert, fuer negatives W12 wird Energie frei.
Die Einheit von W ist J fuer Joule. qφ (r) ist die elektrostatische Energie der Ladung
in einem gegebenen E-Feld. Eine bewegliche Ladung wird in Richtung der Feldlinien
beschleunigt und aendert dabei ihre potentielle Energie. Falls sie sich sehr langsam
bewegt (ueberdaempft, keine Masse), dann entsprechen ihre Trajektorien genau den
Feldlinien. Eine Verschiebung entlang der Aequipotentiallinien aendert die Energie nicht
und benoetigt keine Arbeit.
Wir betrachten eine Ladungsverteilung ρ (r) im externen Feld φext (r) :
Wext =
Z
ρ (r’) φext (r’) dV 0
21
In Wirklichkeit haben wir aber meistens die Situation, dass das elektrische Feld durch
die Ladungen selbst verursacht wird. Was ist die Energie der Ladungsverteilung in ihrem
eigenen Feld? Wir bringen N Ladungen qi sukzessiv vom Unendlichen an die Positionen
ri :
∗
Wint =
N X
N
qi qj
qi qj i6=j 1 X
=
2 i=1 j=1 |ri − rj |
i=2 j=1 |ri − rj |
N X
i−1
X
* Superposition der Coulombkraft und i = 1 kostet noch keine Energie.
Wuerde man im letzten Schritt i = j zulassen, waere der Term im Nenner 0! In anderen
Worten: die Selbstenergie einer Ladung in ihrem eigenen Feld wuerde divergieren.
Z
ρ (r) ρ (r’)
1Z
dV
dV = Wint
2
|r − r0 |
Kontinuumslimes
−→
Dieses Integral ist wohldefiniert, da ρ stetig ist.
1Z
1 Z
P oisson
ρ (r’) φ (r’) dV 0 = −
(∆φ) φdV 0
2
8π
Z
1 Z
part.Int. 1
0
b "elektrostatische Energie"
=
−∇φ · ∇φdV =
|E (r)|2 dV 0 =
8π
8π
1
b "elektrostatische Energiedichte"
|E (r)|2
⇒ ω (r) =
=
8π
⇒ Wint =
Homogen geladene Kugel
(
ρ (r) = ρ (r) =
ρ0 , falls r ≤ R
0, sonst
Feldgleichungen koennen auf drei Wegen geloest werden:
1. Gauss-Gesetz
Z
2
E · dA = 4πr E (r) = 4π
Zr
(
02
0
0
4πr ρ (r ) dr =
0
3
16π 2
ρ0 r3 = 4πQ Rr 3 ,
3
16π 2
ρ0 R3 = 4πQ,
3
3
Wobei Q = ρ (r) dV 0 = ρ0 4πR
die Gesamtladung ist.
3
R
Qr
,
R3
Q
,
r2
(
⇒ E (r) =
falls r ≤ R
sonst
Das Potential erhaelt man durch Integration (φ0 = −E):
( Q
φ (r) =
R
2
r
− 2R
2 +
Q
,
R
3
2
, falls r ≤ R
sonst
22
falls r ≤ R
sonst
2. Poisson-Gleichung
In Kugelkoordinaten erhalten wir eine gewoehnliche Differentialgleichung:
1 d
dφ
− 4πρ (r) = ∆φ (r) = 2
r2
r dr
dr
!
c1
+ c2
r
0
2π
c3
r ≤ R : ρ = ρ0 ⇒ inhomogene GDGL ρ2 φ0 = 0 ⇒ φ = − ρ0 r2 − + c4
3
r
r > R : ρ = 0 ⇒ homogene GDGL r2 φ0
0
=0⇒φ=−
Wir muessen nun allerdings noch die Integrationskonstanten bestimmen! Aus φ(∞) = 0
folgt c2 = 0. Da wir keine Punktladung im Ursprung haben ist φ (0) endlich und somit
0
c3 = 0. Ferner hat sowohl ρ (r) als auch ∆φ (r2 φ0 ) einen Sprung bei r = R, φ und
und
φ0 muessen aber in r = R stetig sein. Somit erhalten wir c1 = −Q und c4 = 3Q
2R
erhalten die gleiche Loesung wie in (1)!
3. Integraldarstellung fuer φ
Wir legen r in z-Richtung und nutzen die Rotationssymmetrie des Problems um die
z-Achse aus. Sei also:
!
!
0
r0 sinθ
2
2
r=
, r0 = 0
⇒ |r − r0 | = r0 + r2 − 2rr0 cosθ
r
r cosθ
Damit erhalten wir:
R
2π
φ (r) =
Z
1
Z
Z
Z
ρ (r)
0
02
0
dV
=
dφ
r
dr
|r − r0 |
0
−1
0
ρ0
r0 2
+
r2
−
2rr0 cosθ
1 d (cosθ)
2
R
2πρ0 Z
=
dr0 r0 (|r + r0 | − |r − r0 |)
r
0
Hierbei haben wir
2
a
1
(b + ax) 2 als Stammfunktion von
1
1
(b+ax) 2
verwendet. Wir unter-
scheiden zwei Faelle:
r > R ⇒ φ (r) =
4πρ0 R3
Q
=
3r
r
4πρ0
r < R ⇒ φ (r) =
r
Zr
0
02
0
r dr +
ZR
0
rr dr
r
0
Q
=
R
Was wieder das gleiche Ergebnis wie (1) und (2) liefert.
23
3 1 r2
−
2 2 R2
!
Selbstenergie der homogen geladenen Kugel
2
ω (r) =
⇒ Wint =
r≤R
r>R
1
Q
R6
|E (r)|2 =
8π
8π r14
Z∞
R
∞
Q2 Z 2 r2 Z 2 1
2
r dr 6 + r dr 4
4πr drω (r) =
2
R
r
0
0
2
=
r2
Q
2
R
2
1
1
3Q
+
=
= Wint
5R R
5 R
N ebenbemerkung : Im Feld um die Kugel steckt viel mehr Energie als in der Kugel
selbst!
Fuer R → 0 divergiert die Selbstenergie einer Punktladung, wie wir vorhin schon bemerkt
haben. Fuer R ≡ const ist sie konstant ⇒ Modell z.B. fuer das Elektron.
Wir setzen Wint gleich der Ruheenergie:
3 e2
3 e2
= 1.7f m = 1.7 · 10−16 m
= me c2 ⇒ Re =
5 Re
5 me c2
Offensichtlich gibt es aber in diesem Modell keine Kraefte die die Ladungsverteilung
zusammenhalten!
Weitere Beispiele
• Geladene Linie: Linienladungsdichte λ =
Gauss-Gesetz folgt:
Q
,
L
z.B. DNA: λ =
−2e
.
3.4Å
Aus dem
2πrLE (r) = 4πλL
2λ
⇒ E (r) =
r
r
⇒ φ (r) = −2λln
R
= −λln
r
R
2 !
⇒ divergiert fuer r klein!
z
L
r
R
24
r
• Geladene Ebene: Flaechenladungsdichte σ. Nach Gauss liefert nur der Deckel
und Boden Beitraege:
A
2AEz = 4πσA
⇒ Ez = 2πσ
⇒ φ (z) = −2πσz
⇒ Kraft unabhaengig vom Abstand.
Potential steigt linear an.
σ
• Plattenkondensator: Zwei geladene Ebenen. Feldlinien parallel zwischen den
Platten. Im Aussenraum heben sich die beiden Kraefte auf, im Innenraum hingegen addieren sich die beiden Kraefte zu 4πσ.
Fuer die Gesamtladung gilt: Qges = Q − Q = 0. C bezeichne die Kapazitaet des
Kondensators. Die Potentialdifferenz entspricht der Spannung U :
∆φ = U = 4πσd = 4π
d
1
Q
d = 4π Q = Q
A
A
C
E,
E
z
d
d
-σ
0
σ
• Kugelkondensator: Zwei Kugelschalen mit Radien R1 und R2 , Ladungen Q und
−Q. Kugelsymmetrie und Gauss liefern:
E(r) =
0
Q
r2
0
falls r < R1
falls R1 < r < R2
falls r > R2
Q 1
R1
⇒ φ(r) = Q
1
r
1
R
2
1
R2
−
−
0
falls r < R1
falls R1 < r < R2
falls r > R2
V = φ (R1 ) − φ (R2 ) ,
C=
25
Q
R1 R2
=
V
R2 − R1
Φ
R2
R1
Q
-Q
R1
R2
r
• Dipol: Zwei gleichgrosse, aber entgegengesetzte Ladungen sind
durch einen Ab
+q
+
standsvektor a getrennt. Eigentlich ist das Potential bekannt φ (r) = −q
,
|r|
|r−a|
wir interessieren uns aber fuer den Grenzfall |a| |r|. Wir verwenden hierzu die
multivariate Taylorentwicklung:
3
∂f
1 X
∂ 2f
(a = 0) ai +
(a = 0) ai aj + ...
2 i,j=1 ∂rj ∂ri
i=1 ∂ri
1
= f (r) + (a · ∇) f (0) + (a · ∇)2 f (0) + ...
2
f (r + a) = f (a)
Dipol: f (r) =
1
|r|
=
3
X
1
1
(x2 +y 2 +z 2 ) 2
q
a
-
+
-q
⇒
− 1
1
= (x − a1 )2 + (y − a2 )2 + (z − a3 )2 2
|r − a|
3
3
1 X
−ri
1 X
−δij 3ri rj
= +
(−a
)
+
+ 5
i
r i=1 r3
2 i,j=1 r3
r
−q
1
r·a 1
⇒ φ (r) =
+q
+ 3 +
|r|
|r|
r
2
!
2
qr · a
a a→0 (qa) · r
=
+ O 3 −→
3
r
r
r3
p·r
qa=:p
⇒ φ (r) = 3
r
26
!
(−ai ) (−aj ) + ...
3 (r · a)2 a2
− 3
r3
r
!!
Vergleiche mit φ ∼ 1r . Hier: φ ∼
Kugelkoordinaten gilt:
φ (r) =
1
.
r2
Oberste Ordnung hat sich weggehoben. In
p·r
pcosθ
1
= −p · ∇ =
3
r
r
r2
Fuer E (r) = −∇φ (r) gilt:
– Kugelkoordinaten:
2pcosθ
r3
1
psinθ
Eθ = − ∂θ φ =
r
r3
1
∂ϕ φ = 0
Eφ = −
rsinθ
Er = −∂r φ =
– Kartesisch: Ei = −∂i φ = −∂i
⇒ Eext (r) = − rp3 +
Feld Eext (r)?
3(r·p)r
r5
rj pj
r3
=−
δij pj
r3
−
3rj pj ri
r5
Welche Kraft wirkt auf den Dipol in einem aeusseren
T aylor
F = −qEext (0) + qEext (a) ≈ −qEext (0) + q (Eext (0) + (a · ∇) Eext (r)) |r=0
Wenn Eext ≡ const ⇒ F = 0
Drehmoment um 0: M = −q (0 × Eext (0))+q (a × Eext (a)) = 0+q (a × Eext (a))
⇒ bei Eext ≡ const dreht sich der Dipol. M verschwindet fuer a k Eext . Was ist
die zugehoerige Energie? Welche Konfiguration ist sinnvoller (↑↑ oder ↑↓)?
F = (p · ∇) Eext = ∇ (p · Eext ) − p × (∇ × Eext ) = −∇V
⇒ V = −p · Eext
Die potentielle Energie eines Dipols im aeusseren Feld ↑↑ ist somit guenstiger.
Kartesische Multipofwicklungen
Wir betrachten eine beliebige Ladungsverteilung, die um den Ursprung lokalisiert ist.
Es bezeichne Q die Gesamtladung, p das Dipolmoment und Qij den Quadrupoltensor
(bzw. das Quadrupolmoment). Fuer das Potential am Ort r ergibt sich mit dem PoissonIntegral:
z
y
φ (r) =
Z
ρ (r’)
dV 0
0
|r − r |
r
x
R0
27
Entwicklung um
|r|
R0
1 liefert:
φ (r) =
=
Z
1
ρ (r’)
r
+
X −ri i
r3
(−ri0 )
1 X 3ri rj
δij
+
− 3
5
2 i,j
r
r
{z
|
=:Rij
!
(−ri0 )
−rj0
}
+ ...dV 0
1Z
r Z
Q r·p
ρ (r’) dV 0 + 3 ρ (r’) r’dV 0 = + 3 + ? + ...
r|
r
r
{z
} r |
{z
}
=:p
=Q
3
X
3
3r2
−
r5
r3
i=1
0 0
Wir uebertragen jetzt die Eigenschaft "Spurlosigkeit" auf ri rj (auch ein Tensor) und
erhalten auf Grund der Spurlosigkeit von Rij das gleiche Ergebnis:
Bemerkung: Rij ist ein spurloser Tensor, d.h.
X
1Z
2 δij
ρ (r’) Rij ri0 rj0 − r0
2
3
i,j
Rii = 0 =
!
dV 0
Deshalb koennen wir den isotropen Teil von Rij weglassen. Es folgt:
X 3ri rj
1Z
φ (r) =
ρ (r’)
2
r5
i,j
ri0 rj0
−r
0 2 δij
3
!
dV 0 =
1 ri rj Z
0
0 0
02
δ
ρ
(r’)
3r
r
−
r
ij dV
i j
2 r5 |
{z
}
=:Qij
⇒ φ (r) =
Q p·r 1
ri rj
+ 3 + Qij 5 + ...
r
r
2
r
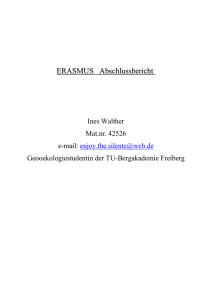
Weit draussen sieht man eine Punktladung! Die Ausnahmen sind:
+1
+1
• Q = 0 ⇒ Dipol dominiert
+1
p
-2
p
-1
• p = 0 ⇒ Quadrupol
dominiert
p
+1
Monopol
Dipol
Quadropol
1.4 Randwertprobleme und Greensche Funktionen
Fuer eine gegebene Ladungsverteilung ρ (r) folgt das elektrostatische Potential p (h) ir
R ρ(r’)
im unbegrenzten Raum aus dem Poisson-Integral: φ (r) = |r−r
0 | Fuer viele praktische
Anwendungen muss man aber das Potential in einem Raumbereich berechnen, der durch
Oberflaechen berandet ist, die ganz bestimmte elektrostatische Eigenschaften haben.
28
Der Standardfall sind metallische Leiter, also z.B. eine Punktladung vor einer
Metalplatte:
In einem Metall gibt es frei bewegliche Elektronen ⇒ im Gleichgewicht muss im Metall gelten: E = 0, φ ≡ const. Wie sind
die Gegebenheiten direkt an der Oberflaeche? Hier sammeln sich
Ladungen mit einer Flaechenladungsdichte σ (r) an.
-
+
-
Wir legen einen flachen Quader um die Oberflaeche und erhalten mit dem Gauss-Gesetz:
Z
E · dA =
∂V
Z
n · E2 − n · E1 dA
| {z } | {z }
Deckel
= 4πσ (r) A
Boden
n
A
⇒ n (E2 (r) − E1 (r)) = 4πσ (r)
Die Normalkomponente von E (r) macht an einer Oberflaeche mit Flaechenladungsdichte
σ (r) einen Sprung von 4πσ (r).
Nun legen wir eine flache Schleife senkrecht durch die Oberflaeche und verwenden den
Satz von Stokes:
0=
Z
(∇ × E) · dA
A
=
Z
E · dr = l (E1 − E2 ) = 0
C
Die Tangentialkomponente von E (r) ist stetig ueber eine Oberflaeche mit der Flaechenladungsdichte σ (r).
Da fuer einen metallischen Leiter E1 = 0 im Inneren gilt, haben wir insgesamt: das
elektrische Feld E steht senkrecht auf der Leiteroberflaeche und springt von innen nach
aussen von N ull auf 4πσ.
Das Randwertproblem mit der Bedingung φ ≡ const auf ∂V geloest werden ("DirichletRandbedingungen", im allgemeinen Fall wird φ (r) auf dem Rand vorgegeben). Die
1
1
(n · ∇φ) = − 4π
∂n φ (r).
Flaechenladungsdichte folgt dann als: σ (r) = −4π
Ist die Flaechenladungsdichte gegeben, dann loest man das Problem mit vorgegebenem
∂n φ (r) auf dem Rand ("Neumann-Randbedingungen"). Die Vorgabe beider Randbedingungen waere eine Ueberbestimmung.
Wir gehen jetzt allgemeine Loesungsformeln fuer diese Randwertprobleme an. Gegeben
sei ρ (r) in V . Gesucht wird eine Loesung mit ∆φ (r) = −4πρ (r) in V und φ (r) = f (r)
auf ∂V (Dirichlet) oder ∂n φ (r) = f (r) auf ∂V (Neumann).
Da die Poisson-Gleichung eine lineare PDE ist und somit das Superpositionsprinzip gilt,
29
verwenden wir die Methode der "Greenschen Funktion". Diese ist fuer die PoissonGleichung definiert durch ∆G (r, r0 ) = −4πδ (r − r0 ). Da ∆G (r, r0 ) symmetrisch in r
und r0 ist gilt auch ∆0 G (r, r0 ) = −4πδ (r − r0 ).
Ist G bekannt, dann folgt die allgemeine Loesung als (ohne Randbedingungen!):
φ (r) =
⇒ ∆φ (r) =
Z
Z
ρ (r’) G (r,r’) dV 0
0
ρ (r’) ∆G (r,r’) dV =
Z
ρ (r’) (−4πδ (r-r’)) dV 0 = −4πρ (r)
Green’sche Funktionen existieren fuer alle linearen PDEs und ODEs (Wellengleichungen,
Waermeleitungsgleichung, Schroedingergleichung etc.)!
Ausnahme: Green’sche Funktionen gibt es nicht fuer nicht-lineare PDEs wie bspw. die
Poisson-Boltzmann-Gleichung (oder die Navier-Stokes-Gleichung) ∆φ = e−φ .
Zurueck zur Poisson-Gleichung: allgemeine Loesung = spezielle Loesung + homogene
Loesung:
G (r,r’) =
1
+ F (r,r’)
|r − r0 |
Im unendlichen Raum (d.h. keine Randbedingungen) folgt F (r,r’) ≡ 0.
Fuer die allgemeine Formel fuer G folgt mit der 2. Green’schen Identitaet:
Z
Z
0
φ (r’) ∆ψ (r’) − ψ (r’) ∆φ (r’) dV =
V
φ (r’) ∂n0 ψ (r’) − ψ (r’) ∂n0 φ (r’) dA0
∂V
Waehle ψ (r’) = G (r,r’) und φ (r’) als Loesung der Poisson-Gleichung, also ∆φ (r’) =
−4πρ (r’)
⇒
Z
φ (r’) (−4πδ (r-r’)) − G (r,r’) (−4πρ (r’)) dV 0
V
=
Z
φ (r’) ∂n0 G (r,r’) − G (r,r’) ∂n0 φ (r’) dA0 = −4πφ (r) +
Z
4πdV 0 G (r,r’) ρ (r’)
V
∂V
⇒ φ (r) =
Z
V
1 Z
G (r,r’) ρ (r’) dV 0 −
(φ∂n0 G − G∂n0 φ) dA0
| {z } | {z }
4π
∂V
:=I
:=II
• Dirichlet’sches Randwertproblem:
GD (r,r’) = 0 fuer r ∈ ∂V (durch Wahl von F)
⇒ Term II verschwindet
⇒ in Term I einsetzen und φ (r) ausrechnen: φ (r’) = f (r’)
• Neumann’sches Randwertproblem: Im Prinzip wollen wir: ∂n0 GN = 0, also
dass Term I verschwindet. Aber:
Z
V
∆0 G (r,r’) dV 0 =
Z
−4πδ (r,r’) dV 0 = −4π =
V
Z
∂V
⇒ ∂n0 G (r,r’) 6= 0
30
G (r,r’) |∇ ·{zdA’}
0
=dA∂n
4π
Loesung des Problems: ∂n0 GN ≡ const = − |A|
⇒ φ (r) =
Z
V
1 Z
GN (r,r’) ρ (r’) dV +
GN (r,r’) ∂n0 φ (r’) dA0
4π
0
∂V
Zusammenfassung: Wir finden eine vollstaendige Loesung, wenn GD (bzw. GN )
bekannt ist. Beide haengen nicht von ρ (r) oder f (r) bzw. g (r) ab und sind rein geometrischer Natur. Der dritte Term wird wegen der Eichfreiheit vernachlaessigt. ∂n φ (r’)
auf dem Rand ist als f (v) vorgegeben.
Green’sche Funktion: Lineare Differentialgleichung
Lφ (r) = f (r) ⇒ LG (r,r’) = δ (r-r’)
Loesung
=⇒ φ (r) =
Z
f (r’) G (r,r’) dV 0
Gilt nur wenn keine Randbedingungen erfuellt sein muessen, also wenn ueber den gesamten
Raum integriert wird.
Die Green’sche Funktion "transportiert Information von r0 nach r".
"Propagator"
Beispiel (Waermeleitungsgleichung).
(∂t − λ∆) G (r,r’,t,t’) = δ (r-r’) δ (t-t’)
G (r,r’,0,0) = δ (r-r’)
(r − r0 )2
=⇒ G (r,r’,t,t’) =
−
3 exp
4λ (t − t0 )
(4πλ (t − t0 )) 2
Θ (t-t’)
Loesung
!
Poisson-Gleichung:
∆G (r,r’) = −4πδ (r-r’)
⇒ φ (r) =
Z
G (r,r’) ρ (r’) dV 0 −
V
1 Z
φ (r’) ∂n G (r,r’) − G (r,r’) ∂n φ (r’) dA0
4π
∂V
Wie kann man GD und GN richtig waehlen?
G (r,r’) =
1
|r − r0 |
+F (r,r’) ,
∆F = 0
| {z }
partikulaereLoesung
Metalle: Dirichlet-Problem, φ ≡ const auf Oberflaeche, geerdete Metallplatte: φ = 0 ⇒
keine Oberflaechenterme (Term I faellt auch weg, da φ = 0 auf dem Rand).
31
Zwei wichtige Eigenschaften von GD
• Symmetrie unter r ↔ r’. Mit der 2. Green’schen Identitaet folgt naemlich fuer
φ (r”) = GD (r,r”) und ψ (r”) = GD (r’,r”)
Z
GD (r,r”) ∆00 GD (r’,r”) −GD (r’,r”) ∆00 GD (r,r”) dV 0 = −4π (GD (r,r’) − GD (r’,r))
|
V
=
Z
{z
=4πδ(r’-r”)
}
|
{z
=−4πδ(r-r”)
}
GD (r,r”) ∂n00 GD (r’,r”) − GD (r’,r”) ∂n00 GD (r,r”) dA0 = 0
∂V
|
{z
=0
|
}
{z
=0
}
⇒ GD (r,r’) = GD (r’,r)
• Eindeutigkeit von GD :
Seien φ1 , φ2 zwei Loesungen. Setze ψ := φ1 − φ2 . Es gilt ∆ψ = 0 sowie ∀r0 ∈ ∂V :
ψ (r’) = 0.
Wir zeigen nun mit Hilfe der 1. Green’schen Identitaet (mit φ = ψ), dass ψ ≡ 0
und somit φ1 = φ2 gilt:
Z
V
⇒
Z
ψ ∆ψ + (∇ψ)2 dV 0 −
|{z}
=0
Z
∂V
ψ ∂n ψdA0 = 0
|{z}
=0
2
(∇ψ) dV 0 = 0 ⇒ ∇ψ = 0 ⇒ ψ ist konstant, aber: ψ = 0 auf ∂V ⇒ ∀r : ψ = 0
Dies ist auch der Beweis fuer die Nichtexistenz eines E-Felds im Faraday’schen
Kaefigs.
Beispiele
• Geerdete Metalplatte
1
Wir benoetigen Dirichlet’sche Greenfunktion GD = |r−r
0 | + FD (r,r’)
Von F ist bekannt: ∀r ∈ V : ∆FD (r,r’) = 0 sowie ∀r ∈ ∂V : GD (r,r’) = 0
Einfacher Trick: Eine Loesung von ∆φ = δ (r-r’) hat automatisch ∆φ = 0 wenn
r0 ∈
/V
⇒ Generiere dadurch F (r,r’) ⇒ "Methode der Bildladung" ("method of images")
Nutze Symmetrie des Systems: Platziere Bildladung mit umgekehrtem Ladungsvorzeichen am Spiegelpunkt:
⇒ GD (r,r’) =
=
−1
1
+
0
|r − r | |r − rB |
1
(x − x0 )2 + (y − y 0 )2 + (z − z 0 )2
32
1
2
−
1
(x + x0 )2 + (y + y 0 )2 + (z + z 0 )2
1
2
x
Fuer z = 0 ⇒ GD
y , r’ = 0
0
φ = 0 auf ∂V ⇒ keine Oberflaechenterme
0
0
Wir legen die Punktladung auf die z-Achse ⇒ r’ = 0 , rB = 0
z0
−z 0
1
1
φ (r) = qG (r,r’) = q
−
0
|r − r | |r + r0 |
!
(x, y, (z − z 0 ))
⇒ E (r) = −∇φ (r) = q
x2 + y 2 + (z − z 0 )
−
2
3
2
(x, y, (z + z 0 ))
x2 + y 2 + (z + z 0 )2
3
2
q
(0, 0, −2z 0 )
1
⇒ E (z = 0) = q 3 ∼ −ez 3
r
x2 + y 2 + z 0 2 2
z
Das
E-Feld
steht senkrecht auf der Metalplatte und zerfaellt lateral wie ein Dipol
1
∼ r3 .
• Induzierte Oberflaechenladung (nur an z = 0)
σ (x, y) =
q
1
E ((x, y, z = 0)) = − 4π
2π
z0
r2
+
z02
3 ,
r 2 = x2 + y 2
Radialkoordinaten
2
• Berechnen der gesamtinduzierten Ladung
QB =
Z
σ (x, y) dA = 2π
z=0
= +qz 0
Z∞
r
0
Z∞
0
d
dr z0
r2 + z 0 2
3
2
q
−
dr
2π
1
r2 + z 0 2
1 dr
= −q
2
Also: Es wird genau die Ursprungsladung induziert!
• Ursprungsladung und induzierte Ladung ziehen sich an!
"Bildkraft": Kraft auf Ursprungsladung = -Kraft auf Metallplatte (Newton III)
33
Kraft auf Metallplatte: "summieren kleine Bildkraefte auf die induzierten Ladungen auf, um Kraft auf Leiter zu erhalten"
Z
Z
1
FB =
dFB = dAσ E (z = 0)
2
z=0
=
1
1
σ 4πσ
ez dA = −q 2 ez
|
{z
}
2
(2z 0 )2
Z
Ez
Coulombgesetz fuer zwei Ladungen q und −q im Abstand 2z 0
Der Faktor 21 ist noetig, um eine Doppelzaehlung der Ladungen in der Verteilung
zu vermeiden (induzierte Ladungen bauen sich sukzessive auf). Genauere Begruendung ueber "Maxwell-Tensor" fuer Impulsuebertrag.
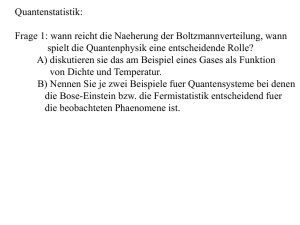
1.5 Numerische Loesung des Randwertproblems
Wir betrachten drei verschiedene Ansaetze.
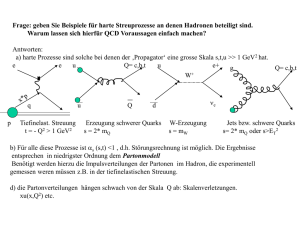
• 1 Finite Differenzen
Die Poisson-Gleichung ∆φ (r) = −4πρ (r) wird auf einem Gitter diskretisiert. Wir
betrachten der Einfachheit halber den Fall d = 1:
φ00 (x) = −4πφ (x)
Die zweite Ableitung kann folgendermassen berechnet werden:
1
φ (x + ∆x) = φ (x) + φ0 (x) ∆x + φ00 (x) ∆x2 + O x3
2
1
φ (x − ∆x) = φ (x) − φ0 (x) ∆x + φ00 (x) ∆x2 + O x3
2
φ
(x
+
∆x)
+
φ
(x
−
∆x)
− 2φ (x)
⇒ φ00 (x) =
+
O
x3
∆x2
Gitter φi+1 + φi−1 − 2φi
b "Drei-Punkte-Formel", h = Gitterkonstante
= −4φ (xi ) , =
⇒
h2
Wir wollen Dirichlet’sche Randbedingungen: φ0 = φN +1 = 0
−2
1
1
⇒ 2
h
0
..
.
..
.
0
1
−2
0
1
...
0
...
...
...
...
1
−2
..
.
1
..
0
..
...
..
.
..
.
1
..
...
...
.
.
...
..
.
.
0
ρ1
φ1
..
..
.
.
.
.
.
.
.
.
. = −4π .
.
.
.
.
.
.
.
0
..
.
−2
ρN
φN
0
0
..
.
..
.
ρ, ϕ
0.08
0.06
ρ
0.04
φ
0.02
0.2
0.4
0.6
Dieses lineare Gleichungssystem Aφ = ρ (mit Tridiagonalmatrix A) kann fuer
detA 6= 0 algebraisch geloest werden.
34
0.8
1.0
x
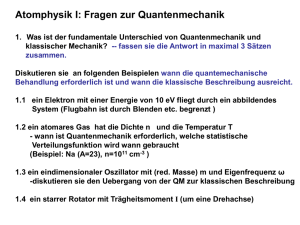
• 2 Variationsverfahren
Wir starten von der Beobachtung, dass die Loesung der Poisson-Gleichung,
∆φ = −4πρ, auch das Minimum eines Energiefunktionals ist:
Z
1 Z
2
(∇φ (r)) dV − ρ (r) φ (r) dV
E [φ] =
8π
Beweis. Beispiel fuer eine Variationsrechnung
E [φ]. Variation: φ → φ + δφ, δφ = 0
Euler-Lagrange-Gleichung fuer
∂V
Z
1 Z
(∇φ + ∇δφ)2 − (∇φ)2 dV − ρ [(φ + δφ) − φ] dV
8π Z
Z
1
=
∇φ · ∇δφdV − ρδφdV + O δφ2
4π Z
Z
pI 1
(−∆φ − 4πρ) δφdV +
=
δφ ∂n φdA + O δφ2
|{z}
4π
⇒ δE =
∂V
=0
⇒ ∆φ = −4πρ
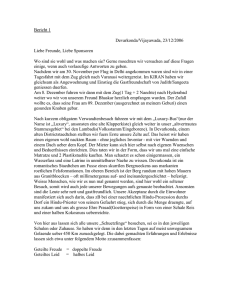
Es ergibt sich folgende numerische Loesungsstrategie: Verwende eine Testfunktion.
Beispielsweise ein Polynom φτ ({ai }1≤i≤n+1 ) =
n
X
aj+1 X j . Werte nun E [φ] fuer
j=0
unsere Testfunktion φτ aus und minimiere E bezueglich der Parameter ai .
Beispiel: ρ =
1
4π
(1 − x) ⇒ φ = 13 x − 21 x2 + 16 x3
φτ = aX (1 − X) ⇒ 12 · 8πE [φτ ] = 7a2 − 2a ⇒ amin =
1
−1 1
⇒ Emin =
7
8π 84
Die exakte Loesung φ = 13 X − 12 X 2 + 16 X 3 ergibt hingegen:
ϕ
φexact
0.06
0.05
1 1
1 1
−1 2
E [φ] =
−
=
8π 45 4π 45
8π 90
0.04
φT
0.03
0.02
0.01
0.2
0.4
0.6
0.8
1.0
x
• 3 Finite-Elemente-Methode (FEM)
Kombiniert Elemente von 1 und 2 . Wir transformieren die PDE in ihre "schwache
Form" durch Multiplikation mit einer Testfunktion w (x) und Integration ueber das
35
Intervall [a, b]. Es gilt fuer jede Testfunktion w:
I=
Zb
w (x) [φ00 + 4πρ] = 0
|
a
b
I = wφ0 −
{z
}
=
b Residuum R
Zb
Zb
0 0
w φ dx +
a
a
w4πρdx = 0
a
Die schwache Form haengt nur noch von ersten Ableitungen ab und kann deshalb
unter schwaecheren Bedingungen geloest werden. Nach Diskretisierung kann diese
Gleichung algebraisch und unabhaengig von w geloest werden.
Galerkin-Methode:
φ (x) =
ω (x) =
n
X
i=1
n
X
φi Ni (x) =: φ · N (x)
ωi Ni (x) =: ω · N (x)
i=1
Sowohl φ als auch ω werden nach "Formfunktionen" (Polynome der Ordnung n-1)
("shape functions") entwickelt.
!
−φ0 |a
Zb
dN dN
×
dx φ + ω N (x) 4φρ (x) dx = 0
I = ω · 0 −ω
dx
dx
0
a
φ |b
|
{z
}
|
{z
=:fext
}
=:K
f := fint + fext ⇒ ω · K · φ = ω · f
⇒ K · φ = f kann algebraisch geloest werden!
Im Dirichlet-Fall sind Teile von φ gegeben. Im Neumann-Fall hingegen ist fext
bekannt. Dementsprechend muss anders aufgeloest werden.
Software fuer FEM:
– Comsol Multiphysics (userfreundlich)
– Abaqus, Ansys, Adina (Spezialprogramm)
– dune, deal.II (open software aus Heidelberg)
Bemerkung: Die Theorie der Testfunktionen, sowie die Existenz und Eindeutigkeit
von Loesungen der hier behandelten PDEs wird in der Funktionalanalysis untersucht.
1.6 Entwicklung in spezielle Funktionen
Laplace- und Poisson-Gleichungen muessen oft mit bestimmten Symmetrien geloest werden. Dies gelingt in der Regel mit einem Separationsansatz mit Transformation in
36
geeignete Koordinaten (z.B. Legendre-Polynome pl (X), Kugelflaechenfunktionen Ylm (θ, φ)).
Motivation:
Elektrostatisches Problem: ∆φ = 0 in V, φ (x, y) = 0 an den Raendern links, rechts,
unten. φ (x, y) = φ0 (x) am oberen Rand.
Separationsansatz: φ (x, y) = f (x) g (y)
⇒ ∆φ = ∂x2 f g + f ∂y2 g = 0
1 2 1 2 ⇒
∂x f
∂ g
+
f
g y
|
{z
}
haengt nur von x ab
|
{z
=0
}
haengt nur von y ab
1
1 2 ∂y g = α2 = − ∂x2 f
g
f
αy
⇒ g (y) = g1 e + g2 e−αy = g3 cosh (αy) + g4 sinh (αy)
g3 = g1 + g2 , g4 = g1 − g2
f (x) = f1 cos (αx) + f2 sin (αx)
⇒
Aus den Randbedingung berechnet man:
φ (0, y) = 0 ⇒ f1 = 0
φ (x, 0) = 0 ⇒ g3 = 0
φ (x0 , y) = 0 ⇒ α = αn =
allg. Loesung
⇒
nπ
, n∈N
x0
∞
X
nπ
nπ
cn sinh
φ (x, y) =
y sin
x
x0
x0
n=1
Die Koeffizienten cn werden durch die restlichen Randbedingungen festgelegt. Es gilt:
∞
X
nπ
nπ
cn sinh
φ (x, y0 ) = φ0 (x) =
y0 sin
x
x0
x0
n=1
⇒ cn =
Zx0
2
x0 sinh
nπ
y
x0 0
0
nπ
φ0 (x) sin
x dx
x0
Dies entspricht der Fourier-Entwicklung von φ0 (x). Falls die Reihe konvergiert, so sind
die Koeffizienten eindeutig bestimmt und somit ist insbesondere die Fourierentwicklung
einer Funktion im Falle der Existenz eindeutig.
1.7 Mathematischer Einschub 2: Fourier-Entwicklung
Erinnerung: Die Taylor-Reihe ist eine Entwicklung in Polynome: f (x) =
∞
X
n=0
Nun entwickeln wir in 2π-periodische Funktionen:
f (x + 2π) = f (x) ⇒ Entwicklung in sin und cos
37
an X n
∞
X
Ansatz: f (x) = a0 +
an cos (nx) + bn
n=1
Z2π
cos (nx) dx = 0,
0
|
{z
sin (nx)
}
|
gerade F ktn.
Z2π
{z
}
ungerade F ktn.
sin (nx) dx = 0
0
1Z
cos ((n + m) x) + cos ((n − m) x) dx = πδnm
2
Z
1Z
cos ((n − m) x) − cos ((n + m) x) dx = πδnm
sin (nx) sin (mx) dx =
2
Z
1Z
sin (nx) cos (mx) dx =
sin ((n + m) x) + sin ((n − m) x) dx = 0
2
Z
cos (nx) cos (mx) dx =
Z2π
⇒ sin (nx) und cos (mx) sind orthogonal zueinander. ⇒
f (x) dx = 2πa0
0
2π
2π
2π
1 Z
1Z
1Z
⇒ a0 =
f (x) dx, an =
f (x) cos (nx) dx, bn =
f (x) sin (nx) dx
2π
π
π
0
0
0
Satz von Dirichlet: Die Fourierreihe konvergiert, wenn f (x) und f 0 (x) stueckweise
stetig sind.
Man kann die Fourierreihe auch mit Hilfe der Euler Formel eiφ = cosφ + isinφ in
komplexer Form schreiben. Es gilt:
f (x) =
∞
X
cn einx = c0 +
n=−∞
= c0 +
∞
X
cn (cos (nx) + isin (nx)) +
cn (cos (nx) + isin (nx)) +
= c0 +
|{z}
=a0
∞
X
c−n (cos (nx) − isin (nx))
n=1
n=1
∞
X
c−n (cos (−nx) + isin (−nx))
n=1
n=1
∞
X
∞
X
(cn + c−n ) cos (nx) + i (cn − c−n ) sin (nx)
|
{z
}
|
{z
}
n=1
=an
=bn
1
(an − ibn ) , (n ≥ 1)
2
1
= (an + ibn ) = c¯n , (n < 0)
2
⇒ cn =
c−n
Also ist f (x) genau dann reell, wenn c−n = c¯n gilt. Weiter gilt:
2π
2π
1
1 Z −inx
1 Z
cn = (an − ibn ) =
[cos (nx) − isin (nx)] f (x) dx =
e
f (x) dx
2
2π
2π
0
0
Wir machen nun den Uebergang von periodischen zu beliebigen Funktionen. Hierzu
fuehren wir fuer eine Funktion f eine Periodenlaenge T ein und betrachten danach den
38
Fall T → ∞.
1
f (t + T ) = f (t) ⇒ f (t) =
T
1 X
2
cn eiωn t
n∈Z
T
2πn
1
ωn =
, cn =
T
T
1
Z2
1
2
(2π)
1
2
− T2
|
T →∞
−→
1
Z
{z
}
= f˜(ωn )
b "Fourier-Integral"
e−iωt f (t) dt = f˜ (ω) =
1
2
(2π)
e−iωn t f (t) dt
R
1
⇒ f (t) =
T
1 2
2π
T
1 X
2
f˜ (ωn ) eiωn t =
n∈Z
1
X 2π 1
2
T }
(2π) n∈Z | {z
f˜ (ωn ) eiωn t
=∆ω
1
−→ √
2π
T →∞
Z
b "Fourier-Transformierte"
eiωt f˜ (ω) dω = f (t) =
R
Die Fouriertransformation weist folgende interessante und nuetzliche Eigenschaften auf:
f (t)
a1 f1 (t) + a2 f2 (t)
f 0 (t)
Z
h (t) =
1
2π
f (t − s) g (s) ds
f˜ (t)
a1 f˜1 (ω) + a2 f˜2 (ω)
iω f˜ (ω)
f˜ (ω) g̃ (ω)
Linear
Ableitung
Multiplikation
Parsival Theorem: Faltung
Produkt
Wo verwendet man Fouriertransformationen in der Physik?
Ortsraum: f (t) ←→ f˜ (ω) Fourierraum/reziproker Raum, ω Frequenz
Ortsraum: f (x) ←→ f˜ (k) Fourierraum/reziproker Raum, k Wellenvektor
Bemerkung: Die Fouriertransformierte f˜ (t) existiert fuer jede L1 Funktion f . Falls
f ∈ L2 gilt, so ist auch f˜ ∈ L2 .
1
Hierbei ist f ∈ Lp : ⇐⇒
Z
p
|f (x)|p dx < ∞.
R
In Worten bedeutet dies etwa so viel wie: Eine Funktion liegt in Lp genau dann, wenn
sie p-fach integrierbar ist. Fuer p = 1 "integrierbar", fuer p = 2 "quadradintegrabel" etc.
39
Einsetzen von f˜ (ω) in das Fourier-Integral liefert:
Z
Z
Z
Z
1 Z
iωt
0 −iωt0
0
0
0 1
iω(t−t0 )
f (t) =
dωe
dt e
f (t ) = dt f (t )
e
= f (t0 ) δ (t − t0 ) dt0
2π
2π
R
⇒ δ (t) =
R
1
2π
Z
R
R
R
eiωt dt
R
1 Z 1 iωt
√
√ e dω
⇒ δ (t) =
2π
2π
|
{z
1
δ̃(ω)= 2π
}
Bemerkung: Das Resultat fuer die Delta-Funktion haengt allerdings vom Vorfaktor ab.
Die Wahl die wir fuer die Transformation getroffen haben hat unter Anderem den Vorteil,
dass man die Inverse der Fouriertransformation relativ einfach bestimmen kann. In der
Funktionalanalysis hingegen ist (haeufig) die Fourier-Transformierte der Delta-Funktion
die 1. In der Tat stellt diese ein neutrales Element des Faltungsraums (erweitert auf
Distributionen) dar.
Funktionen, welche in beiden Raeumen die gleiche Form haben sind die Gauss-Funktionen.
Verallgemeinert man die Transformation auf vektorwertige Funktionen, so gilt:
1
f (k) =
(2π)
Z
d
2
eik·x f (x) dV
Rn
Beispiele
• Fourier-Integral
f (t)
2
−a t2
Gauss’sche Funktion
e
Exponentialfunktion
e−a|t|
f˜ (ω)
2
ω
√1 e− 2a
qa
2
a
π ω 2 +a2
• Fourier-Reihe
Stufenfunktion
Saegezahn
f(t)
0 −π ≤ t ≤ 0
π 0 < t ≤ π
t fuer −π < t ≤ π
cn
q
√
π1
2n
[(−1)n − 1]
n
2πi (−1)
n
40
3
3
2
1
2
-3
-2
-1
1
1
2
3
-1
-2
-3
-2
-1
1
2
3
-3
Vollstaendige orthonormale Funktionensysteme (VONS)
Ein VONS ist eine Menge von Funktionen {un (x)} auf einem Intervall [a, b] mit folgenden
Eigenschaften:
•
Zb
un (x) um (x) dx = δnm
a
• Vollstaendig:
X
un (x) un (x) = δ (x − y)
n
Dies entspricht der Definition einer Orthonormal-Basis eines Vektorraums. Unsere Vektoren sind hier allerdings Funktionen! Ferner definiert das Integral aus der ersten
Eigenschaft ein Skalarprodukt zwischen zwei Lp -Funktionen und man erhaelt somit den
Hilbertraum der Lp -Funktionen auf [a, b].
Allgemein ist ein Hilbertraum ein Vektorraum mit Skalarprodukt, welcher bezueglich
der vom Skalarprodukt induzierten Norm vollstaendig ist, d.h. jede Cauchy-Folge konvergiert. Die Vollstaendigkeit hat nichts mit der Basis zu tun!
Fuer jedes f ∈ L2 gilt:
f (x) =
X
cn un (x) , cn =
n
⇒ f (x) =
=
Z
2
|f (x)| dx =
Zb
a
Z
un (x) dx
a
X
n
Zb
b
Z
un f
0
(x ) dx
0
un (x) =
a
Zb
f (x0 )
X
un (x0 ) un (x) dx
n
a
f (x0 ) δ (x − x0 ) dx = f (x)
f (x) f (x) dx =
X
cn cm
Z
un (x) um (x) dx =
n,m
X
n
|
{z
=δnm
cn cn =
X
|cn |2 < ∞
n
}
Die Fouriertransformation war nun ein Beispiel fuer eine Zerlegung nach Wellen. Man
41
kann Funktionen aber auch auf andere Weisen zerlegen, z.B. auf der Kugeloberflaeche:
In Kugel-KO: f (r) = f (r, θ, φ) =
∞ X
l
X
Rlm (t)
l=0 m=−l
Orthonormalitaet:
Z2π
dφ
Vollstaendigkeit:
|
{z
}
”Kugelf laechenf unktion”
d (cosθ) Yl0 m0 (θ, φ) Ylm (θ, φ) = δl0 l δm0 m
−1
0
∞
X
Z1
Ylm (θ, φ)
l
X
Ylm (θ0 , φ0 ) Ylm (θ, φ) = δ (cosθ − cosθ0 )
l=0 m=−l
Entwicklung in Kugelflaechenfunktionen
Wir schreiben die Laplace-Gleichung in Kugelkoordinaten:
1
1 2
1
∂r (rφ) + 2
∂θ (sinθ∂θ φ) + 2 2 ∂ϕ φ = 0
r
r sinθ
r sin θ
Ein geschickter Separationsansatz lautet:
u (r)
P (cosθ) Q (ϕ)
r
!
P Q d2 u
uQ d
dP
uP d2 Q
+
sinθ
+
=0
⇒
r dr2 r3 sinθ dθ
dθ
r3 sin2 θ dϕ2
!
2
1 d2 Q
sinθ d
dP
2
2 1d u
⇒
= −r sin θ
−
sinθ
Q dϕ2
u dr2
P dθ
dθ
φ (r, θ, ϕ) =
| {z }
|
≡:−m2
{z
(1)
}
haengt nicht von ϕ ab
(∗)
⇒ Q00 + m2 Q = 0 ⇒ Qm (ϕ) = eimϕ (m ∈ Z)
(∗) Achtung: hier geht ein, dass Q (ϕ) 2π-periodisch sein muss! Wir betrachten nun die
rechte Seite von (1):
1
1
dP
r2 d2 u
=
−
sinθ
⇒
dr2}
P sinθ dθ
dθ
|u {z
|
≡:λ
!
+
m2
sin2 θ
{z
(2)
}
haengt nicht von r ab
d2 u
λ
− 2 =0
2
dr
r
Die verbleibende Differentialgleichung schreiben wir um mit cosθ = x:
⇒
d
1
d
=
dx
−sinθ dθ !
!
d m2
2 dP
⇒
1−x
+ λ−
P =0
dx
dx
1 − x2
(3)
⇒
(4)
Wir betrachten zunaechst nur den Fall m = 0 (Zylindersymmetrie):
⇒ 1 − x2 P 00 − 2xP 0 + λP = 0
(5)
42
Wir suchen Loesungen fuer den Bereich −1 ≤ x ≤ 1. Ein Taylor-Ansatz zeigt, dass es
konvergierende Loesungen nur fuer λ = l (l + 1) mit λ ∈ N0 geben kann.
⇒ Pl (x) =
2
1 dl 2
x
−
l
2l l! dxl
("Legendre Polynome", Konvention: Pl (1) = 1)
Das Legendre Polynom Pl ist vom Grad l und je nach Wahl von l entweder gerade oder
ungerade.
P0 = 1, P1 = x, P2 =
Die Funktionen {
•
Z1
2l+1
2
1
2
•
Pl (x)} bilden ein VONS auf [−1, 1]:
Pl (x) Pl0 (x) dx =
−1
∞
X
l=0
1 2
1 3
3x − 1 , P3 =
5x − 3x , ...
2
2
2
δll0
2l + 1
2l + 1
Pl (x) Pl (x0 ) = δ (x − x0 )
2
Die Radialgleichung (3) lautet somit:
bl
r2 d2 u
= l (l + 1) ⇒ ul (r) = al rl+1 + l
2
u dr
r
Die allgemeine Loesung der Laplace-Gleichung bei Zylindersymmetrie lautet aufgrund
des Superpositionsprinzips:
φ (r, θ) =
∞
X
l=0
l
al r +
bl
rl+1
!
Pl (cosθ)
Die Koeffizienten {al }l und {bl }l werden durch die Randbedingungen festgelegt. Wenn
0 ∈ V gilt und sich keine Punktladung in V befindet, dann ist bl = 0. Wenn ∞ ∈ V
und φ (∞) = 0, dann ist al = 0.
43
Beispiele
• Punktladung q bei r0 in z-Richtung ⇒ Zylindersymmetrie:
∆φ = 0 gilt fuer V1 := {r|r < r0 } und V2 := {r|r > r0 }
⇒ wir bestimmen die Koeffizienten fuer beide Entwicklungen
In V1 gilt auf der z-Achse (r < r0 ) :
|r − r0 | = r0 − r ⇒ φ (r, 0) =
Pl (θ = 0) = 1 ⇒ al =
q
r0 l+1
q
q
= r0 − r
r0 1 −
T aylor
r
r0
=
∞ r l
q X
r0 l=0 r0
, bl = 0
Die Betrachtung der z-Achse reicht zur Bestimmung der Koeffizienten!
In V2 gilt auf der z-Achse (r > r0 ) :
q
q
(r − r0 ) = r − r0 ⇒ φ (r, 0) =
=
r − r0
r
1
1 − rr0
!
T aylor
=
∞
qX
r0
r l=0 r
l
Pl (θ = 0) = 1 ⇒ al = 0, bl = qr0 l
Mit den Definitionen r> := max(r, r0 ), r< := min(r, r0 ) lassen sich beide Entwicklungen in einer Formel zusammenfassen:
φ (r, θ) =
∞
X
r< l
q
=q
P (cosθ)
l+1 l
|r − r0 |
l=0 r>
Insbesondere sieht man, dass diese Formel auch fuer r → r0 eindeutig ist.
• Leitende Kugel im homogenen Feld
Das homogene Feld E0 in z-Richtung koennte z.B. durch einen Plattenkondensator
erzeugt werden. Die Randbedingungen lauten dann:
φ (R, θ) ≡ const = φ0
φ (r → ∞, θ) = −E0 z + const = −E0 rcosθ + φ1
Zylindersymmetrie und die erste Randbedingung liefern:
φ (R, θ) =
∞
X
l=0
!
bl
al R + l+1 Pl (cosθ) = φ0 = φ0 P0 (cosθ)
R
l
Multiplikation mit Pn (cosθ), Integration ueber θ und Verwendung der Orthogonalitaet ergibt:
b0
= φ0 ⇒ b0 = R (φ0 − a0 )
R
bn
n > 0 : an Rn + n+1 = 0 ⇒ bn = −an R2n+1
R
n = 0 : a0 +
44
Mit der zweiten Randbedingung folgt:
a0 = φ1 , a1 = −E0 , a2 = a3 = ... = 0
⇒ b0 = R (φ0 − φ1 ) , b1 = E0 R3 , b2 = b3 = ... = 0
⇒
φ (r, θ) =
φ1
(φ0 − φ1 )
+
|{z}
unwichtige Konstante
|
{z
R
r}
Gesamtladung auf der Kugel
−
E0 rcosθ
| {z }
homogenes Feld
+
E0
|
R3
cosθ
2
r{z
}
Feld der induzierten Ladungen, Dipol
Wir berechnen die induzierte Gesamtladung vom letzten Term:
r=−
1 ∂φ 3
1 ∂φ =−
=
E0 cosθ
4π ∂n R
4π ∂r R 4π
⇒ Positive Ladungen oben, negative Ladungen unten, die Summe verschwindet
und die Kugel ist effektiv ein Dipol mit Dipolmoment p = E0 R3 ez .
⇒ Polarisierbarkeit α = Ep0 = R3 fuer eine leitende Kugel.
Zurueck zur Laplace-Gleichung in Kugelkoordinaten ohne Zylindersymmetrie. Fuer m 6=
0 lautet die Differentialgleichung fuer P (cosθ) :
dP
d 1 − x2
dx
dx
!
!
m2
+ λ−
P (x) = 0
1 − x2
Sie wird geloest durch die "zugeordneten Legendre-Polynome". Sei Plm (x) mit λ = l(l+1)
wie zuvor und m = 0, ±1, ±2, ..., ±l :
Plm
m l+m l
(−1)m 2 2 d
2
1
−
x
x
−
1
(x) =
2l l!
dxl+m
(l−m)! m
Pl (x)
Man kann zeigen, dass Plm und Pl−m zueinander proportional sind: Plm (x) = (−1)m (l+m)!
0
Fuer m = 0 ergeben sich wieder die Legendre-Polynome: Pl (x) = Pl (x)
• Beispiele:
√
1√
P00 = 1, P10 = x, P11 = − 1 − x2 , P1−1 =
1 − x2 ,
2
√
1 2
P20 =
3x − 1 , P21 = −3x 1 − x2 , ...
2
⇒ die zugeordneten Legendre-Polynome sind gar keine Polynome!
Die Abhaengigkeit von θ und ϕ wird in neuen Funktionen Funktionen zusammengefasst:
Ylm (θ, ϕ) =
2l + 1 (l − m)!
4π (l + m)!
!1
2
Plm (cosθ) eimϕ
∗
(θ, ϕ) = (−1)m Yl−m (θ, ϕ)
Ylm
("Kugelflaechenfunktionen")
45
• Beispiele:
s
Y00
Y20
s
1
3
3
= √ , Y10 =
cosθ, Y1,±1 = ∓
sinθe±iϕ ,
4π
8π
4π
s
s
5
15
=
cosθsinθe±iϕ , ...
3cos2 θ − 1 , Y2,±1 = ∓
16π
8π
In kartesischen Koordinaten:
s
3
z, rY1,±1 =
4π
s
15
(∓x − iy) z, ...
8π
rY10 =
2
r Y2,±1 =
s
3
(∓x − iy) , r2 Y20 =
8π
s
5 2
2z − x2 − y 2 ,
16π
Insbesondere sieht man in der kartesischen Darstellung, dass die Terme rl Ylm unter
∆ = ∂i ∂j verschwinden. Wie oben angegeben, bilden die Kugelflaechenfunktionen ein
VONS fuer Funktionen f (θ, ϕ). Die allgemeine Loesung von ∆φ = 0 in Kugelkoordinaten lautet somit also:
φ (r, θ, ϕ) =
∞ X
l
X
!
l=0 m=−l
blm
alm rl + l+1 Ylm (θ, ϕ)
r
b Modulus des Drehimpuls. m =
b z-Komponente
Bemerkung: In der Quantenmechanik ist l =
des Drehimpuls.
1
Wir entwickeln jetzt |r−r
0 | nach Kugelflaechenfunktionen. Die Abhaengigkeit von (θ, ϕ)
∗
}, welches auch ein VONS bildet.
entwickeln wir nach {Ylm } und die von (θ0 , ϕ0 ) nach {Ylm
X
1
All0 mm0 (r, r0 ) Yl∗0 m0 (θ0 , ϕ0 ) Ylm (θ, ϕ)
=
0
|r − r | l,l0 ,m,m0
!
X
1
1 d2
l(l + 1)
⇒∆
=
r−
All0 mm0 (r, r0 ) Yl∗0 m0 (θ0 , ϕ0 ) Ylm (θ, ϕ)
0
2
|r − r | l,l0 ,m,m0 r dr
r2
= −4πδ (r − r0 ) = −
=−
X
4π
0
∗
δ
(r
−
r
)
Ylm
(θ0 , ϕ0 ) Ylm (θ, ϕ)
r2
l,m
Koeffizientenvergleich
=⇒
4π
δ (r − r0 ) δ (cosθ − cosθ0 ) δ (ϕ − ϕ0 )
r2
All0 mm0 (r, r0 ) = Alm (r, r0 ) δll0 δmm0
!
⇒
1 d2
4π
l(l + 1)
r−
Alm (r, r0 ) = − 2 δ (r − r0 )
2
2
r dr
r
r
Eine genaue Untersuchung ergibt Alm (r, r0 ) =
⇒
l
4π r<
l+1
2l+1 r>
∞ X
l
l
X
1
4π r<
∗
0
0
=
l+1 Ylm (θ , ϕ ) Ylm (θ, ϕ)
|r − r0 | l=0 m=−l 2l + 1 r>
46
Ein Vergleich mit der Entwicklung in Legendre-Polynomen ergibt das Additionstheorem
fuer Kugelflaechenfunktionen (Θ Winkel zwischen (θ, ϕ) und (θ0 , ϕ0 )):
pl (cosΘ) =
∞ X
l
4π X
∗
Ylm
(θ0 , ϕ0 ) Ylm (θ, ϕ)
2l + 1 l=0 m=−l
Wir betrachten eine in r < R0 lokalisierte Ladungsverteilung und machen eine Multipolentwicklung fuer das Fernfeld in Kugelkoordinaten mit r< = r0 , r> = r:
φ (r) =
=
Z
Z
X 4π
ρ (r’)
r0l ∗ 0 0
0 r>R0
=
ρ
(r’)
dV
Y (θ , ϕ ) Ylm (θ, ϕ) dV 0
l+1 lm
|r − r0 |
2l
+
1
r
l,m
s
∞ X
l
X
l=0 m=−l
s
⇒ qlm =
4π qlm
q00 q10
1 q1,±1
+ 2 cosθ ∓ √
Ylm (θ, ϕ) =
sinθe±iϕ + ...
l+1
2l + 1 r
r
r
2 r2
4π Z
l ∗
(θ0 , ϕ0 ) dV 0 (sphaerische Multipolmomente)
ρ (r’) r0 Ylm
2l + 1
Ein Vergleich mit der kartesischen Multipolentwicklung ergibt:
q00 = q, q10 = p3 , q1,±1 =
Q33
∓p1 + ip2
√
, q20 =
, etc.
2
2
Fuer die hoeheren Ordnungen gibt es weniger sphaerische als kartesische Komponenten,
was die Rechnung eleganter macht und vereinfacht.
47
2 Magnetostatik
2.1 Stationaere Stroeme und Magnetfelder
Mikroskopische Erklaerung fuer Magneten: Kreisstroeme.
Moderne Erklaerung (Quantenmechanik): Spin der Elektronen
Anwendungen: magnetische Speichermedien (Festplatten), MRT (z.B. 7T-Tomograph
am DKFZ), Kompass, Magnetsinn von Organismen (Voegel, Fische, Bakterien), Plasmaphysik, Astrophysik, etc.
Weltrekord: 91, 4T am HZ Dresden-Rossendorf mit 200kg schwerer Kupferspule
Kuehlschrankmagnet: 0.05T , Erde: 5 · 10−5 T
Elektrostatik: Eine ruhende Ladungsverteilung ρ (r) erzeugt ein elektrisches Feld E (r);
eine Testladung q erfaehrt dann eine elektrische Kraft Fe = qE.
Magnetostatik: Ein elektrischer Strom (d.h. bewegte Ladungen) erzeugt ein magnetisches Feld B (r); eine bewegte Ladung q erfaehrt dann eine magnetische Kraft Fm .
Achtung: Der magnetische Kompass richtet seine Nadel in Richtung des geographischen
Nordens; da dies seine "Nordseite" ist und sich gegenseitige Pole anziehen, ist der geographische Norden ein magnetischer Sueden!
Quelle
Feld
Kraft
Elektrostatik
dq = ρdV
r−r0
dE (r) = dq |r−r
0 |3
dFe = dqE
Magnetostatik
jdV = Idl
dB (r) = ?
dFm = ?
Ursache
Wirkung
Wirkung
I = j·A Strom durch eine Flaeche, z.B. durch einen Draht ⇒ in der Magnetostatik ist die
Quelle vektoriell, nicht skalar! Ladungserhaltung ⇒ Kontinuitaetsgleichung ρ̇+∇·j = 0.
In der Magnetostatik betrachten wir nur stationaere Stroeme: j = j (r) (keine Zeitabhaengigkeit), ∇ · j = 0.
Die Formeln fuer B und Fm folgen aus experimentellen Befunden: ein stromdurchflossener Leiter an r0 erzeugt ein Feld B an r, welches dann die Kraft Fm bewirkt. Fuer
die Kraft findet man experimentell dFm ∼ I, dFm ∼ dl, dFm ⊥ dl
I
⇒ dFm = dl × B (r)
c
j = I dl
r-r'
j' = I' dl'
r
r'
Diese Gleichung kann als Def inition von B betrachtet werden (dFm , I und dl sind
M essgroessen). Eine Geschwindigkeit ist aus Dimensionsgruenden noetig. Experi-
48
mentell findet man die Lichtgeschwindigkeit c.
Fuer B findet man (experimentell) dB ∼ I 0 dl0 , dB ⊥ dl0 , dB ⊥ (r − r0 ),
1
dB ∼ |r−r
0 |2 (wie dE!)
r − r0
I0 0
⇒ dB (r) = dl ×
c
|r − r0 |3
Fuer eine gegebene stationaere Stromverteilung kann das Magnetfeld also folgendermassen berechnet werden:
⇒ B (r) =
r − r0
1Z
0
j (r’) ×
3 dV
0
c
|r − r |
("Gesetz von Biot-Savart")
Vergleich mit dem Ergebnis aus der Elektrostatik:
E (r) =
Z
ρ (r’)
r − r0
dV 0
|r − r0 |3
("Poisson-Integral")
Lorentz-Kraft auf ein bewegtes Elektron: j = qv
q
⇒ F = Fe + Fm = qE + v × B
c
Aber: B kann so nicht berechnet werden, da ein einzelnes Elektron ein zeitabhaengiges
magnetisches Feld erzeugt.
Das Analogon zum Coulomb-Feld ist nicht die Wechselwirkung zwischen zwei bewegten
Ladungen, sondern zwischen zwei unendlich langen, stromdurchflossenen Leitern.
Wir berechnen zunaechst das magnetische Feld um einen Leiter: j (r’) = Iδ (x0 ) δ (y 0 ) ez
⇒ B (r) =
I 0 Z δ (x0 ) δ (y 0 ) ez × [(x − x0 )ex + (y − y 0 )ey + (z − z 0 )ez ] 0
dV
3
c
[(x − x0 )2 + (y − y 0 )2 + (z − z 0 )2 ] 2
=
I0 Z
xey − yex
0
3 dV
2
0
2
c
2
R (r + (z − z ) )
=
xey − yex
2I 0
eϕ = B (r) mit eϕ :=
cr
y
B ∼ 1r wie beim elektrischen Feld um eine geladene Linie. Die Feldlinien sind Kreise um
den Leiter in einer Ebene senkrecht dazu.
Wir berechnen nun die Kraft auf den zweiten Leiter:
1
2I 0
2II 0
2II 0 1
eϕ = 2 dzez × eϕ = 2 dz ex (xey − yex )
dF = Idzez ×
c
cr
cr
cr r
0
0
2II
1
2II
= 2 dz (−xex − yey ) = 2 dz(−er )
cr r
cr
0
dF
−2II
⇒
= 2 er
dz
cr
!
49
z
y
x
Zwei gleichgerichtete Draehte ziehen sich mit dieser Kraft pro Laenge an. Die Kraefte
wirken parallel zur kuerzesten Verbindung.
Analog zum Coulomb-Gesetz: FC = q1r2q2 aber anders als Abstandsgesetz wegen Integration!
2 2
C2
Einheitentest: [Fm ] = Ams2 = m
2 = [Fe ]
−7 N
SI-System: F = 2 · 10 m fuer I1 = I2 = 1A, R = 1m
µ0 Z j0 × (r − r0 ) 0
dV
B=
4π
|r − r0 |3
F = Idl × B
1
kg
[B] =
= 1 T esla = 104 Gauss, c = (ε0 µ0 )− 2
2
As
2.2 Die Feldgleichungen der Magnetostatik
Analog zum skalaren Potential φ (r) der Elektrostatik fuehren wir jetzt ein Vektorpotential A fuer die Magnetostatik ein (vgl. Zerlegungs- und Eindeutigkeitssatz fuer
Vektorfelder).
j (r’)
1
−(r − r0 )
r − r0
∇×
=
∇
×
j
(r’)
=
×
j
(r’)
=
j
(r’)
×
|r − r0 |
|r − r0 |
|r − r0 |3
|r − r0 |3
!
1 Z j (r’)
dV 0
⇒ B (r) = ∇ × A (r) , A (r) =
0
c |r − r |
Dies ist analog zu E = −∇φ, φ =
Z
ρ (r’)
dV 0 .
0
|r − r |
(analog zu ∇ × E = 0)
⇒ ∇·B=0
Das magnetische Feld hat keine Quellen und seine Feldlinien sind geschlossen. Es gibt
keine magnetischen Monopole (experimentelle Beobachtung)!
Der
Z
Z magnetische Fluss
∇ · BdV 0 =
durch eine geschlossene Flaeche verschwindet: 0 =
V
q
∂V
I
50
B · dA
Wir berechnen die Rotation:
∇ × B = ∇ × (∇ × A) = −∆A + ∇ (∇ · A)
!
1Z
1
∇·A=
j (r’) · ∇
dV 0
c
|r − r0 |
|
{z
=−∇0
1
|r−r0 |
}
1Z
1
=
(∇0 · j (r’))
dV 0 = 0
{z
} |r − r0 |
c |
("Coulomb-Eichung")
=0
1
∆A =
c
Z
1
j (r’) ∆
|r − r0 |
|
⇒ ∇×B=
{z
=−4πδ(r-r’)
!
=
−4π
j (r)
c
}
4π
j (r)
c
("Amperesches Gesetz")
Das gleiche Ergebnis folgt auch aus dem Zerlegungssatz und der Definition von A. Mit
∇ · B = 0 und ∇ × B = 4π
j (r) ist B (r) eindeutig bestimmt! Das Randwertproblem der
c
j (r).
Magnetostatik lautet ∆A = − 4π
c
Integrale Form des Ampereschen Gesetz: wir integrieren ueber eine beliebige Flaeche A
mit Rand ∂A = C:
Z
Stokes
(∇ × B) · dA =
A
Z
B · dr =
4π Z
4π
j · dA =
IA
c
c
A
∂A
c Z
⇒ IA =
B · dr
4π
("Ampersches Durchflutungsgesetz")
∂A
Dies ist analog zum Gauss’schen Gesetz in Integralform: QV =
1
4π
Z
E · dA.
∂V
Hierbei war der elektrische Fluss
Z
E·dA frueher auch als IA definiert. Jetzt bezeichnen
∂V
wir damit den magnetischen Fluss.
Der Gesamtstrom durch die Flaeche IA ergibt sich aus dem Wegintegral. Er verschwindet
fuer geschlossene Flaechen A.
51
Beispiele
• duenner, stromdurchflossener Leiter
I
Es gilt: ∇ · B = 0
⇒ Feldlinien geschlossen.
Zylindersymmetrie
Kreise mit Radius r um den Leiter
I
4π
⇒ B · dr = 2πrB (r) =
I
c
⇒ B (r) =
B
r
2I
wie oben
cr
• dicker, homogen durchflossener Leiter (Analogon zur homogen geladenen
Kugel in der Elektrostatik)
(
j (r) =
1 Z j (r’)
ez πRI 2 , falls r ≤ R
, A (r) =
dV 0 ⇒ A k ez
0
0,
r>R
c |r − r |
0
⇒ A (r) = A (r) ez = 0
A (r)
⇒ B (r) = ∇ × A (r)
1
= er
∂ϕ Az −∂z Aϕ + eϕ ∂z Ar −∂r Az
|{z}
|{z}
r | {z }
=0
=0
=0
1
+ ez
∂r r Aϕ − ∂ϕ Ar
|{z}
|{z}
r
=0
=0
0
= −A (r) eϕ = B (r) eϕ
52
φ
R
r
B
Wie zuvor werten wir nun das Ampersche Durchflutungsgesetz auf einem Kreis
mit Radius r aus:
( 2
I
Ir
4π
, falls r ≤ R
R2
Bdr = 2πrB (r) =
IA =
I, r>R
c
2I r2
⇒ B(r) = eϕ R
1
c
r
j
r≤R
r>R
B
|A|
const.
~ ln r
~1/r
~r
~ r²
R
r
R
r
R
r
• Unendlich lange Spule (wieder in Zylinderkoordinaten)
B
B
a
tr
kt
n
io
s
Ab
p
Fa rak
ll tis
c
I
R
Stromdichte: j (r) =
he
r
NS I
δ (r − R) eϕ
lS
j⊥ez ⇒ A⊥ez ⇒ A (r) = Ar er + Aϕ eϕ
Zylindersymmetrie: A (r) = Ar (r) er + Aϕ (r) eϕ
1
c
0 = divA = ∂r (rAr ) ⇒ Ar =
r
r
A darf bei r → 0 nicht divergieren ⇒ c = 0 ⇒ A = Aϕ (r) eϕ
Fuer das Magnetfeld folgt: B (r) = ∇ × A = ez 1r ∂r (rA (r)) = B (r) ez = B (r)
⇒ ∇ × B = −B 0 (r) eϕ
1
4π
4π NS I
∂r (rA (r)) =
j=
δ (r − R)
= −∂r
r
c
c lS
53
4π NS I
(Θ (r − R) + c1 )
c lS
2
2
2
−4π NS I (r −R )Θ(r−R)
+ c1 r2
c
lS
2
1. Integration liefert: 1r ∂r (rA (r)) =
2. Integration liefert: rA (r) =
Wegen A (r) =
1
c
Z
+ c2
j (r’)
dV 0 muessen A (0) = 0 und A (∞) = 0 sein und somit
|r − r0 |
c1 = −1 und c2 = 0.
4π NS I 2r
⇒ A (r) = A (r) eϕ =
eϕ R 2
c lS
2r
r≤R
r>R
Das Magnetfeld ist dann:
4π NS I
1
B (r) = ∂r (rA (r)) ez = ez c lS
0
r
r≤R
r>R
Im Inneren der Spule ist es konstant, ausserhalb der Spule verschwindet es! Also
ist die Spule die Standardloesung fuer die Erzeugung eines homogenen Magnetfelds (analog zum Plattenkondensator in der Elektrostatik). Wenn dieses allgemeine Ergebnis bekannt ist, koennen die Details mit dem integralen AmpereGesetz hergeleitet werden. Wir verwenden die Schleife C fuer das Wegintegral:
I
B · dr = lS B0 =
C
4π
4π NS I
4π
IA =
NS I ⇒ B0 =
c
c
c lS
NS I
Fuer eine endliche Spule muss der endliche Fluss IA = πR2 4π
ueber den
c lS
gesamten Aussenraum zurueckfliessen, ist dort also sehr klein.
2.3 Lokalisierte Stromverteilungen
Bisher haben wir unendlcih ausgedehnte Leiter betrachtet. Jetzt untersuchen wir den
Fall, dass die Stroeme nur in einem beschraenkten Gebiet |r0 | < R fliessen. Fuer |r| > R
verwenden wir eine kartesische Multipolentwicklung:
1Z
1 r0 · r
r0 2
1 Z j (r’)
0
dV
=
j
(r’)
+
+
O
A (r) =
c |r − r0 |
c
r
r3
r3
"
Der erste Term verschwindet, da:
∇ (rl j) = ∂k (rl jk ) = jl + rl (∂k jk )
| {z }
∇·j=0
⇒
Z
jl (r’) dV 0 =
Z
∇0 (rl 0 jr0 ) dV 0 = rl 0 jr0 54
Rand
=0
!#
dV 0
Ausserdem haben wir:
0=
Z
∂k (rl 0 jk (r’) rm 0 ) dV 0 =
Z
0
0
(∂k rl ) jk rm
| {z }
+ rl 0 (∂k jk ) rm 0 + rl 0 jk (∂k rm 0 ) dV 0
=0
=δkl
⇒
Z
rm 0 jl (r’) dV 0 = −
Z
| {z }
| {z }
=δkm
rl 0 jm (r’) dV 0
Damit lautet der 2. Term der Multipolentwicklung:
11 Z 0
rl Z 0
0
Ai (r) =
rl jk (r’) − rk 0 jl (r’) dV 0
rl rl jk (r’) dV =
3
3
cr
2cr
=
1 Z
1 Z
0
0
(r
·
r’)
j
(r’)
−
(r
·
j
(r’))
r
dV
=
((r’ × j (r’)) × r)k dV 0
k
k
2cr3
2cr3
Wir definieren das magnetische Dipolmoment
1 Z
m :=
r’ × j (r’) dV 0
2c
in Analogie zum elektrischen Dipolmoment p =
⇒ A (r) =
Z
r’ρ (r’) dV 0
1m×r
c r3
analog zum Potential eines elektrischen Dipols φ (r’) = p·r
.
r3
Die Stromdichte zum magnetischen Dipol ergibt sich formal als:
j (r) = −
c m×r
c
1
c
∆A = − ∆ 3 =
∆ (m × ∇) = −c (m × ∆) δ (r)
4π
4π
r
4π
r
⇒ j verschwindet fuer r 6= 0, es handelt sich um einen P unktdipol. j ist eine Distribution
und kann in Integralen verwendet werden. Insbesondere gilt:
Z
1
1 Z j (r’)
0
dV = −m × (∇0 δ (r’))
dV 0
A (r) =
c |r − r’|
|r − r’|
=m×
=
Z
Z
!
Z
1
1
0
δ (r’) ∇
dV = δ (r’) −∇
dV 0
|r − r’|
|r − r’|
δ (r’)
0
r − r’
r
3 = m× 3
r
|r − r’|
55
Das magnetische Feld folgt als
1
rm
ml rm = εkij εklm ml ∂j
3
r
r3
!
3rm rj
3mi 3mi r3 mi 3ri (ml rl )
−
=
−
− 3 +
r5
r3
r5
r
r5
Bi = (∇ × A)i = εijk ∂j Ak = εijk ∂j εklm
= εkij εklm ml
⇒ B (r) =
δjm
r3
rr (m · r) m
− 3
r5
r
analog zum elektrischen Feld eines elektrischen Dipols E (r) = −∇ p·r
− rp3 .
= 3r(p·r)
r3
r5
Fuer einen konstanten Strom I in einer Ebene haben wir einen geschlossenen Weg C = ∂A
so, dass:
m=−
1 I
IZ
I
1 Z
(j (r’) × r’) dV 0 = − I dr’ × r’ =
dA = Aez
2c
2c
c
c
C
Fuer eine Leiterschleife mit Radius R: m =
A
IπR2
ez . Man erhaelt dieses Ergebnis auch
c
folgendermassen:
j (r’) = Iδ (r0 − R) δ (z 0 ) eϕ
∞
2π
Z∞
1 Z 0 0Z
0
r dr dϕ
dz 0 (r0 er + z 0 ez ) × eϕ Iδ (r0 − R) δ (z 0 )
⇒m=
2c
0
=
0
−∞
IπR2
I
2
2πr0 (er × eϕ ) 0 =
ez
| {z } r =R
2c
c
=ez
Systeme, die sich wie magnetische Dipole verhalten: Magnet, Spule, Leiterschleife, Erde,
Elektron, Proton, Neutron, etc.
Gyromagnetisches Verhaeltnis
Fuer einen rotierenden starren Koerper aehnelt das magnetische Dipolmoment m dem
Drehimpuls L. Sei ω der Rotationsvektor und r der Ortsvektor
⇒ v (r) = ω × r
1 Z
ρ (r) (r × v (r)) dV
⇒m=
2c
L=
Z
ρm (r) (r × v (r)) dV
Wenn beide Dichten im Koerper gleich verteilt sind,
⇒
|m|
gq
=
|L|
2mc
ρ
q
=
ρm
,
m
dann folgt m =
q
L
2mc
(gyromagnetisches Verhaeltnis, "g-Faktor")
56
ge eh̄
z.B. fuer ein Elektron: |L| = h̄2 ⇒ |m| = 4m
ec
Experimentell findet man g ≈ 2.002. Die relativistische Dirac-Gleichung ergibt g = 2
und mit der QED kann man Korrekturen ausrechnen, die bis auf 10 Nachkommastellen
mit dem experimentellen Wert uebereinstimmen!!!
Fuer Proton und Neutron findet man gp ≈ 5.58, gn ≈ −3.82 (bei fiktiver Ladung e).
⇒ alle g-Faktoren sind von der Groessenordnung 1, d.h. die Masse sagt zumindest die
Groessenordnung des magnetischen Moments von Elementarteilchen voraus.
Welche Kraft F und welches Drehmoment
M wirken auf einen magnetischen Dipol im
Z
aeusseren Feld B (r)? Es gilt F = 1c j (r) × B (r) dV 0 . Wir entwickeln B um r0 = 0:
B (r0 + r’) = B (r0 ) + (r’ · ∇0 ) B (r0 ) + ...
⇒ Fi =
1Z
1Z
εklm jl (r’) Bm (r0 ) dV 0 +
εklm jl (r’) rn 0 ∂n0 Bm (r0 ) dV 0
c
c
|
{z
}
=0
Dieses Integral hat also den gleichen Charakter wie oben der 2. Term der Multipolentwicklung!
Z
Z
Wir verwenden wieder rm 0 jl (r’) dV 0 = − rl 0 jm (r’) dV 0 und verdoppeln damit den
Ausdruck:
F=
=
1 Z
[(r’ · ∇0 ) j (r’) − r’ (∇0 · j (r’))] × B (r0 ) dV 0
2c
1 Z
[(r’ × j (r’)) × ∇0 ] × B (r0 )
2c
= (m × ∇0 ) × B (r0 ) = ∇0 (m · B (r0 )) − m (∇0 · B (r0 ))
|
⇒ F = −∇0 Vm mit Vm := −m · B (r0 )
{z
=0
}
(Feldgleichung fuer externes Feld)
In einem homogenen Magnetfeld
Z verschwindet diese Kraft (analog zum elektrischen
Feld). Das Drehmoment M =
1
c
r×(j (r) × B (r)) dV errechnet sich in einer aehnlichen
Weise zu
M=m×B
analog zum Drehmoment p × E, das ein elektrisches Dipol im aeusseren Feld erfaehrt.
57
3 Elektrodynamik
3.1 Maxwell-Gleichungen
Bei dynamischen Prozessen sind E und B gekoppelt.
Bisheriger Stand: entkoppelte Feldgleichungen
∇ · E = 4πρ
∇·B=0
∇×E=0
4π
∇×B=
j
c
Faradaysche Ergaenzung 1831: Induktionsgesetze
magnetischer Fluss: IA =
Z
B · dA
experimentelle Beobachtung:
Aenderung von IA erzeugt einen Strom in der Schleife
I
1 dIA
Ringspannung: E := E · dr = −
c dt
∂A
Lenzsche Regel: der induzierte Strom erzeugt ein Magnetfeld, das dem Alten entgegenwirkt.
I
Z
1d Z
1Z
1 dIA
=−
B · dA = −
Ḃ · dA
Stokes:
E · dr = (∇ × E) · dA = −
c dt
c dt
c
A
∂A
1
⇒ ∇ × E = − ∂t B
c
Diese neue Gleichung erzeugt eine Inkonsistenz! ⇒ Maxwellsche Ergaenzung 1865
Problem: Kontinuitaetsgleichung (Ladungserhaltung) soll erfuellt sein: ρ̇ + ∇ · j = 0
ρ̇ = ∂t
1
1
1
∇·E =
∇ · Ė = −∇ · j ⇒ ∇ j +
Ė = 0
4π
4π
4π
c
Widerspruch zur Magnetostatik: ∇ · j = 4π
∇ (∇ × B) = 0
⇒ verbesserte Feldgleichung: ∇ × B =
4π
c
j +
1
Ė
4π
| {z }
”V erschiebungsstrom”
58
exp. Beispiel: Kondensator
wird kurzgeschlossen ⇒ E
wird abgebaut ⇒ erzeugt
Magnetfeld, Testmagnet bewegt sich
Voller Satz Maxwell-Gleichungen:
∇ · E (r, t) = 4πρ (r, t)
1
∇ × E (r, t) + ∂t B (r, t) = 0
c
∇ · B (r, t) = 0
1
4π
∇ × B (r, t) − ∂t E (r, t) =
j (r, t)
c
c
Check Kontinuitaetsgleichung:
∇·j=
1
1
c
∂t (∇ · E) = −ρ̇
∇ · (∇ × B) − ∇ · Ė = −
{z
} c
4π |
4π
=0
3.2 Potentiale
Die Maxwell-Gleichungen im Vakuum (ρ = 0, j = 0) haben Wellenloesungen!
1
∇ × B − ∂t E = 0 ∇×
c
1
1
0 = ∇ (∇ · B) −∆B − ∂t (∇ × E) = −∆B + 2 ∂t 2 B = 0
| {z }
c | {z }
c
=0
=− 1c ∂t B
1 2
⇒ Wellengleichung:
∂t − ∆ B =: B = 0
("d’Alembert Operator")
c2
1
1
0 = ∇ (∇ · E) −∆E + ∂t (∇ × B) = −∆E + 2 ∂t 2 E = 0
| {z }
c | {z }
c
=0
=
1
∂ E
c t
⇒ E = 0
Die elektromagnetischen Wellen wurden 1886-1888 von Heinrich Hertz nachgewiesen.
Zur Vereinfachung der Rechnungen fuehren wir Potentiale ein:
∇ · B = 0 ⇒ B = ∇ × A ⇒ 0 = ∇ × E + 1c ∂t B = ∇ × (E + 1c ∂t A) =: ∇ × (−∇φ)1
⇒ E = −∇φ − ∂t A ⇒ Reduktion von 6 auf 4 Variablen!
c
59
Ausserdem: "Eichfreiheit"
1
φ −→ φ − ∂t Λ
c
A −→ A + ∇Λ ⇒ veraendert Maxwell-Gleichungen und somit E, B nicht
4. Maxwell-Gleichung umschreiben auf A und φ:
1
1
4π
∇ × (∇ × A) + ∂t (∇φ + ∂t A) =
j
c
c
c
1
1
= −∆A + 2 ∂t 2 A +∇ (∇ · A + ∂t φ)
|
|
{zc
}
{z c
}
=A
("Lorentz-Eichung")
=0
Gleichung fuer Lorentz-Eichung bei Eichtransformation:
1
1
∇ · A + ∆Λ + ∂t φ − 2 ∂t 2 Λ = 0
c
c
1
⇒ Λ = ∇ · A + ∂t φ
c
⇒ kann immer geloest werden! (kommt spaeter)
⇒ Lorentz-Eichung kann vorausgesetzt werden
⇒ A =
4π
j
c
("inhom. Wellengleichung")
("Wellengleichung fuer A")
1
1
1
1. Maxwell-Gleichung: − ∆φ − ∂t − ∂t φ = −∆φ + 2 ∂t 2 φ = 4πρ
c
c
c
⇒ φ = 4πρ
("Wellengleichung fuer φ")
⇒ Im Vakuum breiten sich E, B, φ, A mit Lichtgeschwindigkeit aus!
3.3 Einschub: Wellengleichungen
1 2
∂t − ∆ u (r, t) = 0
c2
Behauptung: Die Wellengleichung hat Loesungen der Form f (n · r − ct) fuer f (x) und
Normalenvektor n beliebig.
Beweis:
∂t 2 f (n · r − ct) = c2 f 00 (n · r − ct)
∇f = nf 0
∆f = ∇ · (∇f ) = n2 f 00 = f 00
1
⇒ 2 ∂t 2 f − ∆f = f 00 − f 00 = 0
c
60
Bedeutung: f (x) habe ein
Maximum bei x0 ⇒ bewegt
sich nach rechts mit der Zeit
In 3d: Maximum bei n · r = ct ⇒ "Wellenfront" behaelt Maximum ⇒ Welle breitet sich
in Richtung n aus ⇒ keine "Dispersion" (Welle laeuft nicht auseinander), da c ≡ const
Das wichtigste Beispiel ist: f (x) = eikx ("harmonische oder ebene Wellen")
⇒ u(r, t) = eik·x+iωt
Komplexer Fourieransatz: Einsetzen in Wellengleichung ⇒ Re(u(r, t)) wird als physikalische Loesung genommen. Dabei ist k "Wellenvektor, n = kk Ausbreitungsrichtung, λ = 2π
k
raeumliche Periode, T = 2π
zeitliche
Periode.
ω
1 2
2
Einsetzen in Wellengleichung: ⇒ − 2 ω + k eik·x+iωt = 0
c {z
|
}
=0
⇒ |ω| = kc
("Dispersionsrelation fuer Photonen")
Zum Vergleich: harmonische Kette = einfachste mechanische Schwindung
d2 un
Fn = m 2 = K(un+1 − un ) − K(un − un−1 )
dt
un+1 + un−1 − 2un 2
2
=a K
≈a K∆un
a2
m
⇒ ∆un − 2 ∂t 2 un = 0
|a{zK}
=
("Wellengleichung")
1
v2
Das ist aber nur eine Naeherung. Exakte Loesung:
un (x, t) = uk (t) eikx , x = na
⇒ mu¨k eikx = K(eika + e−ika − 2)eikx uk (t) = 2K(cos(ka) − 1)eikx uk (t)
iωk t
Ansatz: uk (t) = Ak e
2K
ka
=
2sin2
m
2
s
⇒ ωk
2
ka ka
2K
2K
=
(1 − cos (ka)) =
1 − cos
+
m
m
2
2
!!
!
!
K ka ⇒ ωk = 2
sin
m
2 ("Dispersionsrelation fuer harmonische Kette")
61
∂ωk
∂k
Fuer ka 1 : v =
q
=
K
a
m
wie bei Naeherung
Zurueck zur allgemeinen Wellengleichung
Fourieransatz (im Raum): u (r, t) =
1
1
∂2
c2 Z t
− ∆ u(r, t) = 0
ũ (k, t) eik·r d3 k
3
(2π) 2
Einsetzen in Wellengleichung:
⇒
1¨
ũ + k 2 ũ = 0
2
c
("Helmholtz-Gleichung")
Fourieransatz (in Zeit): ũ (k, t) = α (k) eiωt + β (k) e−iωt
⇒ u (r, t) =
1
(2π)
Z 3
2
α (k) eiωt + β (k) e−iωt eik·r d3 k
Anfangsbedingungen: u (r, t = 0) = a (r) , u̇ (r, 0) = b (r)
⇒ u (r, 0) =
1
(2π)
Z
3
2
(α + β) eik·r d3 k =
1
(2π)
Z
u̇ (r, 0) ãeik·r d3 k
3
2
⇒ α + β = ã, iω(α − β) = b̃
1
1
1
1
b̃, β = ã −
b̃
⇒ α = ã +
2
2ωi
2
2ωi
Damit ist die allgemeine Loesung der Wellengleichung bekannt. Eine besondere Loesung
ist der sogenannte "Wellenausbreitungskern" D (r, 0) = 0, Ḋ (r, 0) = δ (r)
Behauptung: Die allgemeine Loesung ist dann:
u (r, t) =
Z
a (r) Ḋ (r-r’, t) + b (r’) D (r-r’, t) d3 r0
D ist ein "Propagator": propagiert die Welle von r0 nach r
Beweis.
D = 0 ⇒ u =
Z
a (r’) Ḋ (r-r’, t) +b (r’) D (r-r’, t) d3 r0 = 0
|
u (r, t = 0) =
Z
Z
}
|
{z
=0
}
a (r’) Ḋ (r-r’, 0) +b (r’) D (r-r’, 0) d3 r0 = a (r)
|
u̇ (r, t = 0) =
{z
=∂t D=0
u (r’)
{z
=δ(r-r’)
D̈
|{z}
=c2 ∆D=0
}
|
{z
=0
}
+b (r’) |{z}
Ḋ d3 r0 = b (r)
=δ(r-r’)
Behauptung: Die Greens-Funktion fuer die inhomogene Wellengleichung folgt aus D.
1 2
∂t − ∆ G (r, t) = δ (r) δ (t) ⇒ G (r, t) = c2 Θ (t) D (r, t)
c2
62
Beweis.
Ġ (r, t) = c2 δ (t) D (r, t) +c2 Θ (t) Ḋ (r, t)
{z
|
}
=0
G̈ (r, t) = c2 δ (t) Ḋ (r, t) +c2 Θ (t) D̈ (r, t)
|
{z
}
=δ(t)δ(r)
1
⇒ 2 ∂t 2 − ∆ G = δ (t) δ (r) + Θ (t) D̈ (r, t) − c2 Θ (t) |{z}
∆D
c
1
c2
D̈
= δ (t) δ (r)
Also koennen wir auch die inhomogene Wellengleichung loesen: u = −h (r) (h Quelle)
u (r, t) =
Z
3 0
dr
Z
h (r’, t0 ) G (r-r’, t − t0 ) dt0
Die Lorentzeichung bewirkt eine inhomogene Wellengleichung
mit Greens-Formalismus
loesbar
Zum Schluss rechnen wir den Wellenleitungskern explizit aus:
D (r, t = 0) = 0, Ḋ (r, 0) = δ (r) ⇒ ã (k) = 0, b̃ (k) =
⇒ D (r, t) =
1
1
3
Z
3
(2π) 2 (2π) 2
1
3
(2π) 2
eiωt − e−iωt ik·r 3
e dk
2ωi
∞
1
Z2π
1 Z 2 eiωt − e−iωt Z
ikrx
=
k dk
dxe
dϕ
(2π)3
2ωi
−1
0
=
=
2π
(2π)3
1
(2π)2
Z∞
k 2 dk
eiωt − e−iωt 1 ikr
e − e−ikr
2ωi
ikr
k 2 dk
−1 iωt
−iωt
ikr
−ikr
e
−
e
e
−
e
2k 2 rc
0
Z∞
0
0
∞
1 1 Z
−1 iωt
−iωt
ikr
−ikr
dk
e
−
e
e
−
e
=
(2π)2 2
2rc
−∞
Z
i
h
−1
i(kr+ωt)
i(−kr+ωt)
i(kr−ωt)
i(−kr−ωt)
=
dk
e
−
e
−
e
+
e
2rc(2π)2 2
R
1
r
r
=
δ t−
−δ t+
2
4πc r
c
c
63
∼
1
r
wie bei Laplace-Gleichung
⇒ haengt nur von r ab
Kugelwelle mit endlicher Ausbreitungsgeschwindigkeit c!
1
r
r
D (r, t) =
δ t−
−δ t+
2
4πc r
c
c
(*)
Mit Green’scher Funktion:
1
r
⇒ G (r, t) = Θ (t)
δ t−
4πr
c
("retardierter Propagator")
(*) Welle in negativer Zeitrichtung ist unphysikalisch (akausal) → kann weggelassen
werden!
Maxwell-Gleichung mit Wellen
1
4πρ = ∇ · E = ∇ −∇φ − ∂t A
c
1
1
= −∆φ − ∂t (∇ · A) = −∆φ + 2 ∂t 2 φ = φ
c | {z }
c
=− 1c ∂t φ
inhomogene Wellengleichung ⇒ φ (r, t) =
φ=
Z
dt0
Z
G (r-r’, t − t0 ) 4πρ (r’, t0 ) dV 0
|r − r0 |
1
ρ
r’,
t
−
dV 0
|r − r0 |
c
!
Z
("retardiertes Potential")
ohne Zeitabhaengigkeit:
φ (r) =
Z
ρ (r’)
dV 0
|r − r0 |
Dito fuer Vektorpotential: A =
("Poisson-Integral der Elektrostatik")
4π
j
c
1Z
1
|r − r0 |
⇒ A (r, t) =
j
r’,
t
−
dV 0
c |r − r0 |
c
!
Bemerkung zur Fouriertransformation:
Z
1 Z
allgemeine Form: u (r, t) = 1 3 d3 k
dωũ (k, ω) eik·r eiωt
1
(2π) 2
(2π) 2
Elektrodynamik: Wellengleichung ergibt Dispersionsrelation |ω| = kc ⇒ ω-Integration
faellt weg
Z
i
h
1
d3 k α (k) eiωt + β (k) e−iωt eik·r
⇒ u (r, t) =
3
(2π) 2
64
3.4 Elektromagnetische Wellen (im Vakuum)
Fourieransatz:
E (r, t) = E0 (k) ei(k·r−ωt)
B (r, t) = B0 (k) ei(k·r−ωt)
∇ · B = 0 ⇒ k · B0 = 0
∇ · E = 0 ⇒ k · E0 = 0
1
1
ω
∇ × E = − Ḃ ⇒ ik × E0 = − (−iω)B0 ⇒ k × E0 = B0
c
c
c
1
ω
∇ × B = Ė ⇒ k × B0 = − E0
c
c
Also:
Lineare Gleichungen: Ueberlagerung moeglich
Ueberlagerung von zwei Wellen:
E (r, t) = [E1 e1 + E2 e2 ]eik·r−iωt
Fuer Ei = |Ei | eiϕi unterscheiden wir 3 Faelle:
• ϕ1 = ϕ2 ⇒ E gedrehte Richtung, aber Richtung ist konstant, "linear polarisiert"
• ϕ2 = ϕ1 ± π2 , |E2 | = |E1 | ⇒ E2 = ±iE1 ⇒ Re(E) rotiert, "zirkular polarisiert"
π
2
• ϕ2 6= ϕ1 , ϕ2 6= ϕ1 ±
⇒ "elliptisch polarisiert"
3.5 Energie und Impuls des elektromagnetischen Feldes
Lorentz-Kraft auf geladenes Teilchen:
v
FL = q E + × B
c
Bei Ortsveraenderung dr wird folgende Arbeit am Teilchen verrichtet:
dW = FL · dr = FL =
dr
dt = FL · vdt = qE · vdt
dt
65
Das Magnetfeld verrichtet keine Arbeit.
Teilchen im Magnetfeld: mr̈ = qc v × B
kinetische Energie: T = dtd ( 12 mṙ2 ) = mr̈· ṙ = qc v × B ·v = 0 ⇒ T ≡ const, |ṙ| ≡ const
Kontinuumsversion: j = qv
Leistung:
Z
Z
c
1
dW
= E (r, t) · j (r, t) dV = E
∇ × B − ∂t E dV
dt
4π
c
=
c Z
1
−∇(E × B) + B (∇ × E) −E ∂t E dV
| {z }
4π
c
=− 1c ∂t B
Bilanz: Energieerhaltung:
dW
c Z
d Z 1
∇(E × B)dV +
(E2 + B2 )dV
0=
+
dt
4π
dt
8π
| {z }
∗
|
{z
}
∗∗
|
{z
∗∗∗
}
∗ = "Energieuebertrag durch auesseres Feld pro Zeit"
∗∗ = "Oberflaechenbeitrag (=
Z
S · dA)"
∗ ∗ ∗ = "Energiedichte des elektromagnetischen Feldes"
c
(E × B)
S :=
4π
("Poynting-Vektor")
Kontinuitaetsgleichung:
dω
+ ∇ · S + ωem
˙ =0
dt
Mechanischer Impuls eines Teilchens:
v
dpmech
= FL q(E + × B)
dt
c
Z
dPmech Z
j
d
−→
= ρE + × BdV = ... = − gem + ∂j Tji ei dV
dt
c
dt
Definition:
S
1
E×B= 2
4πc
c
!
1
δij 2
2
Tij :=
Eij + Bi Bj − (E + B )
4π
2
gem :=
("Impulsdichte em-Feld")
Bilanz: Impulserhaltung
Z
dPmech
d Z
0=
+
gem dV − Tji dAj
dt
dt
i
∂V
Tji nj ist i-te Komponente der Kraft pro Flaeche, die auf dA ausgeuebt wird.
66
3.6 Dipolstrahlung
Aehnlich Multipolentwicklung: Quellen raeumlich begrenzt, |r0 | < R
j (r’, t) = j (r’) eiωt , ω = kc
j (r’) = 0, ∀ |r0 | > R
("Dispersionsrelation")
Fernfeld und Langwellennaeherung: |r| >> R, R << λ << |r|
Inhomogene Wellengleichung:
1
4π
j
A = 2 ∂t 2 − ∆ A =
c c
|r−r0 |
1 Z j r’, t − c
⇒ A (r, t) =
dV 0
c
|r − r0 |
−iωt 1
=e
Z
c
0
eik|r−r | 0
j (r’)
dV
|r − r0 |
0
Taylorreihe in rr << 1:
r0
e
=e e
1+O
r
!!
1 r · r0
1
r0
1
= + 3 =
1+O
|r0 − r|
r
r
r
r
ikr Z
1e
0
r ·r’
⇒ A (r, t) = e−iωt
j (r’) e| −ike
{z } dV
c r
=1
ik|r−r0 |
!!
ikr −iker ·r0
Langwellennaeherung: R << λ << |r|
kr0 ∼
r0
0
<< 1 ⇒ e−iker ·r ≈ 1
λ
Magnetostatik:
Z
j (r’) dV 0 = 0, weil ∇ · j = 0
Hier: ∇ · j = −ρ̇ = iωρe−iωt
⇒
Z
j (r’) dV 0 =
Z
p.I.
(j · ∇0 )r0 dV 0 = −
Z
r0 (∇0 · j)dV 0 = −iωe−iωt
Z
|
r0 ρdV 0
{z
}
Dipolmoment p(r)
⇒ A (r, t) = −ikp
eikr
r
Skalares Potential: aus der Lorentz-Eichung
1
ic
0 = ∇ · A + ∂t φ ⇒ φ (r) = − ∇ · A
c
ω
67
EM-Felder: B (r) = ∇ × A
1
∂t E = ∇ × B ⇒ E (r) = ik∇ × B
c
Alle Operatoren wirken nur auf
eikr
r
(raeumlicher Faktor bzgl. A)! Somit:
eikr
d eikr
eikr
1
= er
= er
ik −
r
dt
r
r
r
⇒ ∇ kann ersetzt werden durch iker
!
∇
F ernf eld
≈
er ik
eikr
r
ic
eikr −iωt
eikr −iωt
⇒ φ (r, t) = − (iker )(−ik)p
e
= −iker · p
e
ω
r
r
1
r
⇒ φ (r, t) = er · ṗ t −
cr
c
1
r
1
⇒ B (r, t) = 2 p̈ t −
× er , B ∼
cr
c
r
⇒ E (r, t) = −(er × B)
E und B sind gleichphasig. E und B stehen senkrecht auf der Ausbreitungsrichtung. ⇒
wie bei ebener Welle.
Also: Problem geloest fuer Fernfeld und Langwelle.
Achtung: Im Nahfeld gibt es zwischen E und B Phasenverschiebung!
Energiebilanz: Transport von Energie und Impuls wird durch Poynting-Vektor beschrieben.
1
c
(E × B) ∼ er 2
S=
4π
r
Transportierte Gesamtleistung:
Z
1
P = S · dA ∼ r2 er · er 2 ≡ const
r
Energiefluss pro Zeit ist konstant
Energieerhaltung fuer Kugelwelle
Genaue Rechnung mit Winkeln
Abstrahlcharakteristik. Fuer S:
i
c h S=
Re E (r) e−iωt × Re B (r) e−iωt
4π c 1
1
−iωt
iωt
−iωt
iωt
=
E (r) e
+ E* (r) e
×
B (r) e
+ B* (r) e
4π 2
2
⇒ Terme der Art 1 und e±2iωt . Interessant ist nur der zeitlich gemittelte S.
T
2π
1Z
Sdt, T =
< S >t :=
T
ω
0
c 1
c
⇒< S >t =
[E × B∗ + E∗ × B] =
Re(E × B∗ )
4π
4
8π
"
!
!#
ikr
−ikr
c
2e
∗ 2e
=
× (er × p )k
Re − er × (er × p)k
8π
r
r
4
ck
=
[((er × p) × er ) × (er × p∗ )]
8πr2
68
Energietransport in einem bestimmten Raumwinkel dΩ = d(cosθ)dϕ
dP
ck 4
= r 2 er S =
er · [...]
dΩ
8π
Spatprodukt: a(b × c) = b(c × a)
Kontraktion: (a × b) · (c × d) = (a · c)(b · d) − (a · d)(b · a)
dP
ω4
ω4
2
=
|e
×
p|
=
|p|2 sin2 θ
r
3
3
dΩ
8πc
8πc
⇒ Dipol strahlt vor Allem senkrecht zu seiner Ausrichtung ab!
⇒
Integrierte Strahlungsleistung:
1
P =
Z
Z
dP
ω4
2
dΩ =
|p|
(1 − cos2 θ)d(cosθ)
dΩ
8πc3
−1
4
⇒ P =
ω
|p|2
3
3c
("Dipolformel")
Beispiele:
• Abstrahlung auf Kreisbahn
Wichtige Anwendungen:
– Elementarteilchenphysik (LHC)
– Synchrotronstrahlung
Abstrahlung unerwuenscht
Abstrahlung gewuenscht
– Elektronen in der Atomhuelle (klassisch)
Kreisbewegung:
ρ (r, t) = qδ (x − Rcosωt) δ (y − Rsinωt) δ (z)
p(t) =
Z
rρ (r, t) dV = qR(ex cosωt + ey sinωt) = Re pe−iωt
p = qR(ex + iey )
2ω 4 q 2 R2
ω4
Dipolf ormel
=⇒ P = 3 |p|2 =
3c
3c3
2 2
2a q
P =
3c3
69
("Gesamte abgestrahlte Leistung")
("allg. Formel fuer beschl. Ladung")
Beispiel: Atom
~2
≈ 0, 53Å
me e 2
1
e2
=
,
v = αc, α =
137
h̄c
2πv
2π
=
= 4 · 1016 Hz
ω=
T
2πR
2 3 e2
P = α ω
3
R
3 1
E
=
= 10−10 s
Lebenszeit: τ =
P
2 α3 ω
QM erklaert Stabilitaet von Atomen
R=
("Bohrscher Radius")
("Feinstrukturkonstante")
• Lichtstreuung
Das einfallende Licht bringt die Elektronen in der Atomhuelle zum Schwingen
Abstrahlung in alle Richtungen
blaues Licht (hoeheres ω) wird staerker abgestrahlt als rotes Licht.
Genaue Rechnung: Lorentz-Modell
Elektron = gedaempter, getriebener harmonischer Oszillator, der durch die Welle getrieben wird:
me r̈ + me Γṙ + me ω0 2 r = −eE0 ei(k·r−ωt)
2π
eik·r = 1, k · r =
R << 1
λ
kurze Zeiten: ungedaempfte Schwingung r(t) = ae−iωt
⇒ (−ω 2 − iΓω + ω0 2 )a =
⇒ p(t) = −eae
−iωt
=
ω0
−e
E0
me
e2
me E 0
2 − ω2 −
Polarisierbarkeit: αe (ω) =
⇒
ω0 2 −
dP
ω4
c
=
|p|2 sin2 θ =
3
dΩ
8πc
8π
iΓω
e−iωt = αe E
e2
me
ω2 −
e2
me c2
70
iΓω
!2
ω 4 sin2 θ |E0 |2
(ω0 2 − ω 2 )2 + ω 2 Γ2
("Lorentzkurve")
Im Teilchenbild: differentieller Streuquerschnitt fuer Photonen
#gestreute Teilchen pro Zeit pro dΩ
1
dP
dσ
=
=
dΩ
#einfallende Teilchen pro Zeit
< |S| >t dΩ
dσ
=
dΩ
e2
me c2
!2
=
ω 4 sin2 θ
(ω0 2 − ω 2 )2 + Γ2 ω
dP
8π
e2
σ=
dΩ ⇒ σ =
dΩ
3 me c2
ωblau
σblau
= 1, 8 ⇒
≈ 10
ωrot
σrot
Z
!2 ω
ω0
Im Streulicht ist 10 mal so viel blau wie rot.
71
4
("Rayleigh-Streuung")
4 Elektrodynamik in Materie
4.1 Makroskopische Maxwellgleichungen
Polarisierung schwaecht das
aeussere Feld.
Idee: Mittelung ueber die
"mikroskopischen"
elektrischen und magnetischen
Felder, e (r, t) und i (r, t),
auf einer Skala von 100Å.
makroskopisches Feld (f (c) "Abstandsfunktion"):
E (r, t) =< e (r, t) >=
Z
f (c) e (r+c, t) d3 c,
Z
f (c) d3 c = 1, f (c) = f (-c)
Maxwell-Gleichung: ∇ · e = 4πη
⇒< ∇ · e > = ∇ < e >= ∇ · E = 4π < η >
< η (r, t) > =
Z
f (c)
XX
n
=
XX
n
j
qnj f (r − rnj (t))
j
T aylor
XX
=
n
=
qnj δ(r − rnj (t) + c)d3 c
qnj [f (r − rn (t)) − dnj (t) · ∇f (r − rn (t)) + ...]
j
X
[qn f (r − rn (t)) − pn (t)∇f (r − rn (t))]
n
=
X Z
f (c) qn δ(r − rn (t) + c)d3 c − ∇
n
= ρ (r, t) − ∇ · P (r, t)
Dabei war n Index Molekuel, j Index Ladung
b Dipolmomentdichte oder Polarisation
P=
72
Z
f (c) δ (r − rn (t) + c) pn (t) d3 c
Makroskopische Maxwell-Gleichung: ∇ · E = 4π < η >= 4π(ρ − ∇ · P)
b "elektrische Verschiebung"
⇒ ∇ (E + 4πP) = 4πρ , D =
|
{z
=:D
}
Andere Maxwell-Gleichung fuer E bleibt gleich: ∇ × E + 1c ∂t B = 0
Problem: Wegen der Einfuehrung von P bzw. D sind die Gleichungen nicht mehr
geschlossen! Beziehung zwischen E und P?
Loesung: Lorentz-Modell fuer Dipole:
P (r, ω) = χe (ω) E (r, ω)
P ∼ E "linear response", χe elektrische Suszeptibilitaet
⇒ D = E + 4πP = E + 4πχe E = (1 + 4πχe ) E
|
{z
=:ε(ω)
}
ε (0) dielektrische Konstante
typische Werte:
• Vakuum ε = 1
• Luft ε = 1, 00059
• Glas ε = 5, 5
• Wasser ε = 80 (permanente Dipole)
• Metall ε = ∞
Makroskopische Maxwell-Gleichungen:
∇ · D = ∇(εE) = 4πρ → Korrektur
1
∇ × E + ∂t B = 0 → unveraendert
c
Aehnliche Rechnungen fuer anderen beiden Maxwell-Gleichungen, Ergebnis:
b "magnetische Dipoldichte"
< i (r, t) >= j (r, t) + ∂t P (r, t) + c∇ × M, M =
1
b "magnetische Erregung"
⇒ ∇ × (B − 4πM) − ∂t (E + 4πP), H =
{z
} c |
{z
}
|
=:H
=D
1
B (r, t)
Linear response: H (r, t) = µ(ω)
Fuer die meisten Materialien ist µ ≈ 1, 1 − µ ≈ ±10−3
73
µ (ω) heisst Permeabilitaetsfunktion, µ (ω, T )
makroskopische Maxwell-Gleichungen:
statistische Physik
1
∇ · D = 4πρ, ∇ × E + ∂t B = 0
c
4π
1
j
∇ · B = 0, ∇ × H − ∂t D =
c
c
1
D = εE, H = B
µ
E und B sind wirkliche Felder
wirken als Kraefte auf Testteilchen.
Anwendung auf eine Grenzflaeche:
Anwendung der Integralsaetze: Gauss auf ∇ · D = 4πρ ⇒
Z
D · dA = An(D2 − D1 )
⇒ ∆D⊥ =
D springt
4πσ
wenn σ 6= 0 und ∆D⊥ = 0 kontinuierlich fuer σ = 0 aber
nicht E! E1 = εD1 , E2 = εD2
Stokes auf ∇ × E = 0(∂t B = 0) ⇒ ∆Ek = 0
Ek stetig, aber nicht Dk !
74
Beispiele:
• Kondensator
keine Ladung! D = 4πσez
∇ · P = −σind ⇒ σind = ±
ε−1
σ
ε
• Punktladung vor Grenzflaeche
Methode der Bildladungen q 0 , q 00
Maxwell-Gleichungen abschnittsweise:
x < 0 : ∇ · E = 4πqδ(r + aex ), ∇ × E = 0
x > 0 : ε∇ · E = 0, keine Ladungen
Stetigkeit: Ek stetig, D⊥ stetig
Ansatz:
E (r) =
q r+aex 3
r−aex
+ q 0 |r−ae
3
x|
|r+aex |
q 00 r+aex 3
|r+aex |
x>0
Stetigkeit fuer D⊥ : E(x <
⇒q
a
(y 2 + z 2 + a2 )
x<0
3
2
0)e˙x + q0
x=0
= εE(x > 0)e˙x −a
(y 2 + z 2 + a2 )
3
2
= εq 00
⇒ q − q 0 = εq 00
Stetigkeit fuer Ek : q + q 0 = q 00 , insgesamt also:
ε−1
q
ε+1
2
q 00 =
q
ε+1
q0 = −
Grenzfaelle:
• Vakuum ε = 1
q 0 = 0, q 00 = q
• Metall ε = ∞
q 0 = −q, q 00 = 0
75
x=0
a
3
(y 2 + z 2 + a2 ) 2
4.2 Elektromagnetische Wellen in Materie
Fourieransatz: E (r, t) = Re (E (r) e−iωt ), B, D, H analog!
MG
iω
B (r) = 0
c
iωµε
E=0
∇ · B = 0, ∇ × B +
c
=⇒ ∇ · E = 0, ∇ × E −
Aus 2. und 4. Formel folgt mit der Identitaet ∇ × (∇ × a) = −∇a + ∇(∇ · a):
∇ × (∇ × E) − ∇ ×
iω
iω
ω 2 µε
B (r) = −∆E + ∇ (∇ · E) − ∇ × B (r) = −∆E − 2 E = 0
| {z }
c
c
c
=0
2
!
ω µε
E (r) = 0
c2
!
ω 2 εµ
⇒ ∆+ 2
B (r) = 0
c
⇒ ∆+
Wellengleichungen wie im Vakuum.
Aber: Neue Dispersionsrelation
ω2 =
c2 k 2
c2 k 2
:= 2
εµ
n
keine Dispersion, wenn ω ∼ ±k (also wenn ε, µ nicht von ω abhaengen)
Typischerweise ist ε, µ von ω abhaengig ⇒ Dispersion
n (ω) :=
q
ε (ω) µ (ω)
("komplexer Brechungsindex")
n (ω) = nr (ω) + ik (ω) ,
(nr : "reller Brechungsindex")
Mit n ist auch k komplex.
Einfache Annahme: k = nk0
Raeumlicher Fouer-Ansatz: E (r) = E0 eik·r = E0 eink0 ·r
MG
=⇒ k · E0 = 0, k0 · B0 = 0
k0 × (nE0 ) = k0 B0 , k0 × B0 = −k0 (nE0 )
⇒ k0 ⊥ E0 , k0 ⊥ B0
transversale Welle
⇒ E (r, t) = Re E0 ei(nr k0 ·r−ωt) e−κk0 ·r
κ bewirkt Absorption von Energie im Medium
Energiedichte: wlm ∼ e−αx
α≈
ω Im (ε)
q
c Re (ε)
Waerme
("Absorptionskoeffizient")
76
Die meisten Materialien haben µ ≈ 1, ε = ε (ω).
Lorentz-Modell: p = χe E
2
4πn0 me e
ε = 1 + 4πχe = 1 + 4πn0 αe = 1 + 2
ω0 − ω 2 − iωΓ
Formel fuer induzierte Dipole, dann kommen noch Effekte von permanenten Dipolen
ωp 2 := 4πn0
e2
me
("Plasmafrequenz")
ω0 2 − ω 2
ωp 2
Re (ε) = 1 +
2 (ω0 2 − ω 2 )2 + ω 2 Γ2
ωΓ
ωp 2
Im (ε) =
2
2 (ω0 − ω 2 )2 + ω 2 Γ2
4.3 Optik: Brechung und Reflexion
Hier: Geometrische Optik
Wellenansatz:
E (r, t) = E0 e−i(k·r−ωt)
E’ (r, t) = E’0 ei(k
0
(einfallend)
·r−ω 0 t)
E” (r, t) = E”0 ei(k
00
(gebrochen)
·r−ω 00 t)
(reflektiert)
Maxwell-Gleichungen (makroskopisch) schraenken E, E’, E” stark ein, aufgrund der
Stetigkeitsbedingungen:
D⊥ und Ek muessen stetig sein!
1
Stokes
∇ × E = − ∂t B ⇒ ∇ × E ≈ 0, da Grenzflaeche sehr scharf
c
⇒ I˙A ≈ 0, da A klein sein kann
E := Ek + E⊥ = Ek + Ez ez
⇒ e z × E = e z × Ek
⇒ ez × E0 ei(k·r−ωt) + ez × E”0 ei(k
00
·r00 −ω 00 t)
0
0
= ez × E’0 ei(k ·r−ω t)
Am gleichen Ort: ω 0 = ω 00 = ω
ck
ck 0
ck 00
= 0 = 00
n
n
n
0
k
n0
⇒ k = k0,
=
k
n
⇒
⇒ reflektierte Welle
gleiches λ, gebrochene Welle: k 0 = k
77
n0
n
Bei gleicher Zeit, aber verschiedenem Ort:
kx
Einfallende Welle nur in x − z−Ebene ⇒ k = 0
kz
⇒ k · r
z=0
= kx x = k00 · x = kx00 x + ky00 y = kx0 x + ky0 y
⇒ ∀x, y : ky00 = ky0 = 0 ⇒ Alle drei Wellen in derselben Ebene!
• 1) kx = ksinα
• 2) kx0 = k 0 sinβ
• 3) kx00 = k 00 sinα
1,3
⇒ kx0 = kx , k = k 00 =⇒ α = α00
⇒ kx0 = kx ,
("Reflexionsgesetz")
k0
n0
sinα
n0
=
=⇒
=
k
n
sinβ
n
("Snellius’sches Brechungsgesetz")
Eintritt in optisch dichteres Medium: n0 > n ⇒ β < α ⇒ Brechung zum Lot
Fresnel’sche Formeln
Amplituden E00 , E000 koennen auch ausgerechnet werden
78
5 Kovarianz und Lagrangeformalismus
Spezielle Relativitaetstheorie:
• Physikalische Gesetze muessen invariant unter Lorentztransformationen sein!
• Newton’sche Mechanik nur invariant unter Galilei-Transformationen
relativistische Theorie verallgemeinert werden
muss auf
• Elektrodynamik kann umgeschrieben werden
Raum und Zeit werden zusammengefasst als Vierervektor im Minkowski-Raum.
ct
Zeitkomponente
x
Raumkomponente
kontravariante Form xα = =
y
Raumkomponente
z
Raumkomponente
Minkowski-Metrik:
|x|2 = (ct)2 − x2 − y 2 − z 2
Konstant unter Lorentz-Transformation
1
0
kontrainvariante Form xα = ηαβ xβ , wobei ηαβ = η αβ =
0
−1
−1
−1
|x|2 = xα xα = ηαβ xβ xα = ct2 − x2 − y 2 − z 2
Physikalische Skalare muessen Lorentzskalare sein!
∂α ∂ α =
∂ ∂
1
∂ ∂
= η αβ α β = 2 ∂t − ∆ = α
∂x ∂xα
∂x ∂x
c
Vierervektor fuer Quellen:
cρ
j
x
jα =
jy
jz
!
∂α j α = 0 ⇒ ∂t ρ + ∇ · j = 0
("Kontinuitaetsgleichung")
79
Vierervektor fuer Felder:
φ
A
Aα = x
Ay
Az
2. Ableitung der Felder sind Quellen Aα =
4π α
j
c
∂α Aα = 0, Lorentzeichung ⇒ ∂ α ∂β Aβ = 0
F αβ := ∂ α Aβ − ∂ β Aα
D −Ex −Ey −Ez
E
0
−Bz By
x
=
Ey
Bz
0
−Bx
Ez −By Bx
0
4π α
⇒
j = ∂β ∂ β Aα − ∂ α ∂β Aβ = ∂β (∂ β Aα − ∂ α Aβ )
| {z }
c
("Feldstaerketensor")
=0
= ∂β F αβ =
4π α
j
c
("inhomogene Maxwellgleichungen")
Homogene Maxwell-Gleichungen folgen aus:
∂β F̃ βα = 0
mit dem dualen Feldstaerketensor:
0 −Bx −By −Bx
B
0
Ez −Ey
= x
By −Ez
0
Ex
Bz Ey −Ex
0
F̃ αβ
Wie die Mechanik kann auch die Elektrodynamik als Extremalprinzip formuliert werden:
δS = δ
L=−
Z
dt
Z
dV, L = 0
("Hamiltonsches Prinzip fuer Wirkung S")
1 αβ
1
F Fαβ − Aα jα
16π
c
("Lagrange-Funktion")
80