Skript zur Vorlesung vom 12. und 13.10.1998, 2400 KB
Werbung

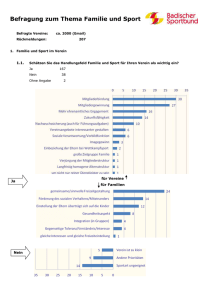
1 Vorlesung Experimentalphysik I am 12.10.1998 und 13.10.1998 J. Ihringer 1 Mechanik Die Mechanik ist die Lehre von der Bewegung und Verformung von Körpern unter dem Einfluß von Kräften. In der „Mechanik der Massenpunkte“ abstrahiert man den realen Körper auf einen einzigen Punkt, eben seinen Massenpunkt, in dem man sich die Masse des Körpers vereinigt denkt. Die Gestalt des Körpers und dessen sonstige Eigenschaften bleiben unberücksichtigt. Auf diese Weise sind Bewegungsabläufe entlang irgendwelcher Bahnen besonders einfach zu beschreiben. Allerdings kommt dieses Bild schon bei der Beschreibung von Rotationen realer Körper an seine Grenzen. Man weiß etwa aus dem Spiel mit einem Kreisel, daß für Rotationsbewegungen besondere Gesetze gelten. Offensichtlich genügt zur Berechnung der Kreiselbewegung die Abstraktion des Kreisels auf einen Punkt mit der einzigen Kenngröße „Masse“ nicht mehr. Man kann die Rotation zwar als eine kollektive Bewegung mehrerer einzelner Massenpunkte entlang den der Kreisbewegung entsprechenden Bahnen auffassen, allerdings ist die mathematische Bearbeitung der simultanen Bewegung mehrerer Teilchen immer sehr aufwendig. Um das „Einteilchenbild“ beizubehalten ordnet man dem Körper neben seinem Massenpunkt, der dann „Schwerpunkt“ genannt wird und sich durch eine bestimmte Lage im Körper auszeichnet, als weitere Eigenschaft seine „Trägheitsmomente“ bezüglich unterschiedlicher Richtungen zu. Die formale Behandlung der Rotationsbewegung ist das Thema der „Mechanik des starren Körpers“. Ein weiterer Schritt zum realen Körper ist die Berücksichtigung seiner Elastizität in der „Mechanik deformierbarer Medien“. Hier werden Phänomene behandelt, die mit der Viskosität der Materialien zusammenhängen. Sie reichen von der Biegung eines Balkens unter Last bis zum Zusammenhang zwischen Druck und Fließgeschwindigkeit in Aero- und Hydrodynamik. Eine ganz besondere Bewegungsart sind „Schwingungen und Wellen“, denen in der Mechanik ein besonderes Kapitel gewidmet ist. Schwingungen, die in allen Bereichen der Physik auftreten, sind deshalb so wichtig, weil sie im Idealfall - der auch in der Realität gut genähert werden kann - ohne Energieverbrauch andauern. Beim Bewegungsablauf „schwappt“ die Energie zwischen unterschiedlichen Formen hin und her, bei einer Schaukel z.B. zwischen kinetischer und potentieller Energie. Der geringe Energieverbrauch der Schwingung ist an einer Uhr mit Pendel gut zu illustrieren: Sie läuft- Tage oder Wochenlang nach einmaligem Aufziehen ihrer Feder. Denkt man sich die Feder als Antrieb eines Fahrzeugs für dessen Fahrt auf irgendeiner Bahn, so weiß man aus Erfahrung, daß die Bewegung nur einige Sekunden dauert. In der Natur kennt jeder die mechanische Schwingungen der Luft als Schall, aber auch in Form oszillierender Bewegungen der Flügel von Insekten, die mit dieser Bewegungsart bei minimalem Energieverbrauch weite Strecken zurücklegen. Die „Wärmelehre“ beschließt die Mechanik. Hier stehen die Gase im Vordergrund. Die Hauptsätze der Wärmelehre sowie Arbeitsweise und optimaler Wirkungsgrad von Wärmekraftmaschinen werden gezeigt. Die „kinetischen Gastheorie“ leitet schließlich die Begriffe der Thermodynamik, z.B. die Temperatur, aus den Verteilungen der kinetischen Energie der einzelnen Teilchen ab. Man erkennt dabei, daß der Mittelwert des Verhaltens 2 vieler Individuen eine stabile Größe ist, ungeachtet der Möglichkeit der Abweichungen vom Mittelwert, den „Fluktuationen“, für deren Größenordnung die Wahrscheinlichkeit abgeschätzt werden kann. Dieses Kapitel ist vielleicht das mit dem höchsten Synergie Effekt auf andere Zweige der Natur-, Wirtschafts- und sogar Sozialwissenschaften, weil es ausschließlich mit fundamentalen Regeln der Statistik arbeitet, die vom Objekt ihrer Anwendung unabhängig sind. 1.1 Messen und Maßeinheiten 1.1.1 Die Einheiten der physikalischen Grundgrößen Die Aussagen der Physik beruhen auf Messungen. Die Ergebnisses einer Messung werden in Anzahl der Einheiten einer für das Problem geeigneten Größe angegeben. Im Rahmen der Mechanik lassen sich alle Meßergebnisse auf drei Grundgrößen zurückführen, die im „Internationalen Einheitensystem“ dem SI-System (Système Internationale d’Unités), festgelegt sind. Man beachte, daß die Definition der Länge auf die der Zeit zurückgeführt ist. Grundgröße Si-Einheit Zeichen Name Länge m Meter Zeit s Sekunde Masse kg Kilogramm Definition 1 m ist die Strecke, die das Licht im 1 s zurücklegt Vakuum in 299792485 1 s ist die Zeit für 9192631770 Schwingungen des 133 55 Cäsium Isotops beim Übergang zwischen den beiden Hyperfeinstrukturniveaus des Grundzustandes (magnet. Kernresonanz) Urkilogramm in Bureau International des Poids et Mesures in Paris Sèvres Tabelle 1 Grundgrößen der Mechanik Grundgröße Elektrische Stromstärke Si-Einheit Zeichen Name Ampere A Kelvin Temperatur K Definition Die Stromstärke in zwei parallel zueinader angebrachten Leitern im Abstand von 1m beträgt 1 A, wenn die Ströme, bezogen auf die Länge 1m die Kraft 2 10 7 N aufeinander ausüben Zwischen dem Nullpunkt der thermodynamischen Temperaturskala (aboluter Nullpunkt) und dem Tripelpunkt des Wassers liegen 273,15 K 3 Mol Stoffmenge mol Candela Lichtstärke cd 1 mol eines Stoffes ist die Menge des Stoffes, die ebensoviele Teilchen enthält, wie Atome in 121000 kg des Nuklids 12 C enthalten sind. Lichtstrom, der von 160 cm 2 eines schwarzen Körpers bei 2042 K, der Schmelztemperatur von Platin, ausgeht Tabelle 2 Grundgrößen für die übrigen Gebiete der Physik Es sei daran erinnert, daß Winkel im Grad- oder im Bogenmaß angegeben werden. Das Bogenmaß ist das Verhältnis des Kreisbogens über dem Winkel zum Radius des Kreises. Es ist also eine dimensionslose Zahl, es trägt den Namen Radiant (rad). Analog ist der Raumwinkel definiert: Man betrachtet ihn als den Öffnungswinkel eines geraden Kreiskegels mit der Spitze im Mittelpunkt einer Kugel. Seine Größe wird als das Verhältnis der Fläche der von ihm an der Oberfläche ausgeschnittenen Kalotte zum Quadrat des Radius der Kugel angegeben. Als Beide Winkelangaben sind Verhältnisse und deshalb dimensionslos. Bei Kontrolle der Einheiten können beide „1“ gesetzt werden. Winkel Radiant Umrechnung in Grad l l rad r 1 rad r Raumwinkel Steradiant F F sr r2 r Tabelle 3 Definition der Winkels Radiant und Raumwinkels Steradiant 1.1.2 Mittelwert und Standardabweichung 360 0 57,2950 2 4 Meßwerte können Ergebnisse der Abzählung irgendwelcher Ereignisse sein, oder Resultate der Ablesung von Instrumenten oder Skalen. Das Ergebnis einer einzigen Messung muß – ohne weitere Information – als zufällig angesehen werden. Man denke z.B. an eine Lotterie, bei der man nur ein einziges Los zieht: Gewinnt man, so wäre die Annahme verfrüht, jedes Los würde gewinnen. Gewinnt man nicht, dann wäre es ebenso falsch, anzunehmen, man gewinnt nie etwas. Die Gewinn/Verlustverteilung der Lotterie erkennt man erst bei wiederholter Teilnahme. Auf die Naturgesetze übertragen schreibt Gottfried Wilhelm Leibniz (1646-1716) an Jakob Bernoulli (1655-1705): „Die Gewohnheiten der Natur erkennt man eben erst durch häufiges Beobachten“. Wiederholt man die gleiche Messung öfter, bei gleichbleibenden Versuchsbedingungen, dann werden –je nach der Art der Messung- die Ergebnisse jeweils mehr oder weniger unterschiedlich ausfallen. Zählt man im Takt einiger Sekunden z.B. die Möwen, die in der Umgebung eines Schiffes in einer bestimmten Richtung unter einem bestimmten Raumwinkel beobachtet werden, dann erhält man eine Tabelle: Abbildung 1 Möwen im gleichen Raumwinkel, beobachtet nach jeweils 3 s. Beobachtung Nr. 1 2 3 4 1 n x xi Mittelwert n i 1 Anzahl 4 3 5 6 4,5 5 Tabelle 4 Definition und Berechnung des Mittelwerts aus 4 aufeinanderfolgenden Beobachtungen Aus den 4 Beobachtungen kann man zunächst den Durchschnitts- oder Mittelwert errechnen, der sich zu 4,5 ergibt. Die mehrmaligen Beobachtung beinhalten aber noch weitere Information über das „Möwen“ System, die sich aus der Standardabweichung erschließt: Nach den in der nächsten Tabelle angegeben Regeln erhält man 1,118 . Die Größe ist ein Maß für die Streuung der einzelnen Beobachtung. Sie besagt, daß bei vielen, wiederholten Beobachtung in 68% aller Fälle mit einem Wert zwischen 4,5- =3,4 und 4,5+ =5,6 zu rechnen ist. Beobachtung Nr .i 1 2 3 4 Quadrat der Standardabweichung Standardabweichung Anzahl-Durchschnitt (Anzahl-Durchschnitt)2 x xi ( x xi ) 2 4 -0,5 0,25 3 -1,5 2,25 5 0,5 0,25 6 1,5 2,25 n 1 2 2 x xi 1,7 n 1 i 1 1,3 Anzahl xi Tabelle 5 Definition und Berechnung der Standardabweichung 1.1.3 Die Poissonverteilung Bei abzählbaren Ereignissen, wie im Beispiel oben, ist das Ergebnis immer eine positive ganze Zahl einschließlich der Null. Letztere ergibt sich, wenn zum Beobachtungszeitpunkt z.B. gerade keine Möwe in Blickrichtung zu finden ist. Die Statistik zeigt, daß die Wahrscheinlichkeitsverteilung einer ganzzahligen Zufallsgröße, wie sich z.B. aus der Abzählung irgendwelcher zufälligen Ereignissen ergibt, die Poisson Verteilung ist. Eine Verteilung zeigt die Häufigkeit, mit der einzelne Ergebnisse bei vielfach wiederholten Messungen erzielt wurden. Die Annäherung an die Poisson Verteilung wird schon bei 250facher Wiederholung z.B. der Möwen Beobachtung gut sichtbar. 6 Abbildung 2 Verteilung der Ergebnisse von 250 Beobachtungen eines Ereignisses mit Mittelwert 5. Mittelwert (5) und Standardabweichung 5 sind eingezeichnet Die Poisson Verteilung entspricht der Hüllkurve dieses Häufigkeits-Gebirges im Idealfall unendlich vieler Messungen. Der Maßstab der Ordinate wird so gewählt, daß das Integral über die Verteilung „1“ ergibt. Abbildung 3 Poisson Verteilung für 5 , die Werte der Ordinate sind mit 100 multipliziert. Versuch 1 On-line Erzeugung des Histogramms zur Poisson-Verteilung aus der Simulation von etwa 250 Abzählungen von Ereignissen mit Mittelwert 5. (Prog. HIST_POI.GFA mit Datei POI_VERT.DAT, letztere wird mit POIVER.GFA erzeugt) 1.1.4 Die Gaußverteilung 7 Ist die Meßgröße nicht das Ergebnis einer Abzählung, sondern das der Ablesung einer Skala, dann ist die Verteilung der Meßwerte durch die Gaußverteilung gegeben. Abbildung 4 Carl Friedrich Gauß (1777-1855) und die nach ihm genannte Verteilung auf der 10 DM Banknote. Die Grafik zeigt die Verteilung für 3 und 1 . Die auf dem Geldschein aufgedruckte Funktion zur Kurve ist f x 1 2 x 2 e 2 2 Bei der Gaußverteilung wird zum einen vorausgesetzt, daß die Abweichungen der Beobachtung vom „wahren Werte“, dem Mittelwert , zu dessen beiden Seiten gleich wahrscheinlich sind. Ist W ( x) f ( x) dx die Wahrscheinlichkeit, daß eine Beobachtung x zwischen x und x dx gefunden wird, dann gilt im Fall der Gaußverteilung: f x 1 x 2 e 2 2 2 Das Maß für die Streuung ist die Standardabweichung . Im Modell der Gaußverteilung bedeutet diese, daß, bei Annahme einer vielfachen Wiederholung der Messung, 68% aller Meßwerte zwischen und gefunden werden. In 99,7% aller Messungen liegen die Meßwerte zwischen 3 und 3 . Mit anderen Worten: Einzelmessungen mit Abweichungen von mehr als 3 vom Mittelwert kommen praktisch nie vor. Ergibt eine Messung doch ein unerwartetes Ergebnis, so kann nur die mehrmalige Wiederholung zeigen, ob es zufällig außerhalb des angenommen Mittelwertes lag oder ob sich der Mittelwert geändert hat. Hat man einige Meßwerte erfaßt, z.B. die zu den 4 Beobachtungen der Möwen, dann zeichnet sich der Mittelwert 1 n x xi n i 1 dadurch aus, daß für ihn die „Summe der Abweichungsquadrate“ n 1 2 2 x xi n 1 i 1 minimal ist. Das Maß für die Streuung ist die Standardabweichung . 8 1.1.5 Näherung der Poisson- durch die Gaußverteilung Bei genügend großen Mittelwerten, etwa ab 4 , kann bei Abzählungen die Poisson- durch eine Gaußverteilung mit Mittelwert und Standardabweichung ersetzt werden. Es ist das besondere an dieser Gaußverteilung, daß der Mittelwert auch deren Standardabweichung vorgibt, weil die Poissonverteilung eben nur durch einen einzigen Parameter, ihren Mittelwert , gekennzeichnet ist. Bei kleinen Mittelwerten von Abzählungen ist die Symmetrie der Abweichungen nicht gegeben, weil die kleinste Beobachtung die Ereigniszahl „0“ ist. In diesen Fällen, etwa für 4 , muß die Wahrscheinlichkeit für ein bestimmtes Ergebnis aus der Poissonverteilung ermittelt werden. Im Gegensatz dazu können Skalenwerte um beliebige Mittelwerte schwanken, insbesondere auch um „0“, so daß diese immer der Gaußverteilung folgen. In der folgenden Abbildung sind Gauß- und Poissonverteilung für den Mittelwert 5 zusammengestellt, man erkennt die kleinen Abweichungen, die aber bei größeren Mittelwerten noch geringer werden. Abbildung 5 Vergleich zwischen Gauß- (durchgezogene Linie) und Poissonverteilung (gestrichelte Linie) bei gleichem Mittelwert 5 und Standardabweichung 5 . Verteilung des Typs Mittelwert Standardabweichun g Anmerkung f (k ) zeigt die Wahrscheinlichkeit, daß eine Zufallsgröße k (natürliche Poisson f (k ) e Zahl) beobachtet wird, wenn deren k! Mittelwert (rationale Zahl) ist.. f ( x) dx zeigt die Wahrscheinlichkeit, daß eine x 2 1 2 2 Beobachtung f x e Gauß 2 mit symmetrischer Streuung um den Mittelwert , zwischen x und x dx liegt Bestimmung von Mittelwert und Standardabweichung aus einer Meßreihe k 9 Für den so definierten Mittelwert ist die Summe der Abweichungsquadrate, und damit 2 , minimal. Die Standardabweichung zeigt die Streuung der einzelnen Meßwerte: Bei vielfacher Wiederholung der Messung würden 68% aller Ergebnisse zwischen und liegen. 1 n x xi n i 1 2 n 1 2 x xi n 1 i 1 xi n Messwert Nr. i Anzahl der Messungen Standardabweichung des Mittelwerts x n Tabelle 6 Zusammenfassung der Poisson- und Gaußverteilung, Mittelwert, Standardabweichung der Einzelmessung und Standardabweichung des Mittelwerts Die Anwendung der Verteilungen setzt voraus, daß das Ergebnis des Experiments nicht durch systematische Fehler beeinflußt wird. Ein systematischer Fehler ergibt sich z.B. aus der Parrallaxe bei der Ablesung eines Instruments. Versuch 2 Parallaxe bei der Ablesung einer Skala. Eine Skala wird schräg an die Wand projiziert. 1.1.6 Messung der Länge Die Messung der Länge kann auf die Abzählung von Wellenlängen zurückgeführt werden. Ist die Wellenlänge durch einen elementaren Prozeß definiert, z.B. den Übergang eines Atoms zwischen zwei Zuständen, dann liefert, bei Wahl einer möglichst kurzen Wellenlänge als Längeneiheit, deren Abzählung entlang der zu messenden Strecke die genaueste Längenangabe. Tatsächlich ist das Meter auf diese Weise definiert. 2,0 1,5 1,0 0,5 0,0 -0,5 -1,0 -1,5 -2,0 0 10 20 30 40 50 l Abbildung 6 Messung einer Strecke der Länge l durch Abzählung der Wellenlängen: l 7 . Die Standardabweichung kann mit / l abgeschätzt werden. Im Interferometer von Michelson wird der von einer Lichtquelle ausgehende Strahl durch einen halbdurchlässigen Spiegel in zwei Teilstrahlen aufgeteilt. Nach Reflektion an zwei 10 Spiegeln werden beide Teilstrahlen zur Überlagerung gebracht. In Abhängigkeit von der Stellung des beweglichen Spiegels überlagern sich die Teilstrahlen konstruktiv oder sie löschen sich aus. Beginnt man bei einer Stellung mit Auslöschung, dann erhält man Auslöschung nach Verschiebung des Spiegels um jeweils / 2 . Eine Messung einer beliebigen Strecke wird damit zu einer Abzählung. 2,0 2,0 1,5 1,5 1,0 1,0 0,5 0,5 0,0 0,0 -0,5 -0,5 -1,0 -1,0 -1,5 2,0 Zeit -1,5 2,0 -2,0 -2,0 1,5 01,5 1,0 1,0 0,5 0,5 0,0 0,0 -0,5 -0,5 -1,0 -1,0 -1,5 -1,5 2 0 4 2 6 4 8 6 10 8 10 Zeit Abbildung 7 Auslöschende (oben) und verstärkende (unten) Überlagerung von zwei Wellenzügen. -2,0 -2,0 0 0 2 2 4 4 6 6 8 8 10 10 Empfänger Sender Feststehender Spiegel Beweglicher Spiegel Halbdurchlässi ger Spiegel Abbildung 8 Michelson-Interferometer mit beweglichem Spiegel zur Längenmessung Versuch 3 Michelson Interferometer zur Angabe der Länge durch Abzählung von Wellenlängen. Hier: gezeigt mit cm-Wellen (Mikrowellen, 3,2 cm ). Anmerkung zum Michelson Interferometer: Läßt man beide Spiegel und die restlichen Komponenten fest, dann ändert sich die Überlagerung der beiden Wellenzüge nur noch dann, wenn sich die Geschwindigkeit der Ausbreitung beider Wellenzüge relativ zueinander 11 verändert. Mit der Sonne als Lichtquelle zeigt das Michelson Interferometer, daß die Lichtausbreitung nicht an einen ruhenden kosmischen „Äther“ gebunden ist. Abbildung 9 Das Interferometer werde z.B. in Luft nach links bewegt und der Sender sende Schallwellen aus. In beiden Stellungen ist der Schall mit der durch die Bewegung erhöhten Geschwindigkeit grün eingezeichnet. Man erkennt, daß sich die Laufzeit beider Strahlen bei Drehung des Interferometers ändert, damit ändert sich die Überlagerung im Empfänger. In Verbindung mit einer Zeitmessung kann bei bekannter Länge die Geschwindigkeit errechnet werden. Formel v v (t ) Anmerkung s t Konstante Geschwindigkeit ds dt Zeitlich variable Geschwindigkeit t Zeit s In der Zeit t zurückgelegter Weg ds dt Ableitung der Funktion des Wegs nach der Zeit Tabelle 7 Betrag der Geschwindigkeit, konstant bzw. zeitlich variabel Versuch 4 Messung von Weg und Zeit zur Bestimmung der Geschwindigkeit eines Geschosses. Gemessen werden 0,003913 s auf 1m Laufweg. v 255 m m , v Schall 330 . s s Versuch 5 Messung der Schallgeschwindigkeit bei variablem Druck 12 Versuch Nr. 1 2 3 Druck kg Pa m s2 1 0.1 < 0.05 Laufzeit Geschwindigkeit s m/s 0,0029 0,0031 0,0092 345 322 108 Tabelle 8 Versuchsergebnis: Schallgeschwindigkeit in Abhängigkeit vom Druck, der Druck ist in Pascal angegeben: 10 5 Pa 1 bar . Die Schallgeschwindigkeit ist bei nicht zu tiefen Drucken praktisch unabhängig vom Druck. Versuch 6 Schwingungsdauer eines Pendel. Die Schwingungsdauer ist von der Auslenkung unabhängig.