Institut für Leistungselektronik und Elektrische Antriebe Universität
Werbung

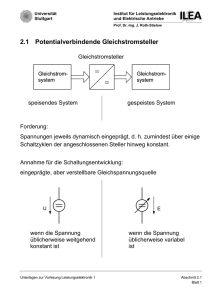
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 2.8 Umkehrstromrichter 2.8.1 Die Grundaufgabe des Umkehrstromrichters und ihre Lösung Gesteuerter Energieaustausch zwischen einem Wechsel- oder Drehstromsystem und einem Gleichstromsystem veränderlicher Polarität. Hauptanwendungsgebiet: Speisung von Antrieben einschließlich elektrischem Bremsen. Ein Umkehrstromrichter entsteht durch Kombination zweier Einfachstromrichter. Prinzipieller Aufbau am Beispiel einer sechspulsigen Brückenschaltung: Bild 1-2.8 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 1 Praktischer Aufbau: Bild 2-2.8 Symbol für den Umkehrstromrichter: Bild 3-2.8 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 2 2.8.2 Umkehrstromrichter in Gleichstromsystemen 2.8.2.1 In Verbindung mit einer Gleichstrommaschine Bild 4-2.8 Arbeitsbereich des Umkehrstromrichters und der Maschine: Bild 5-2.8 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 3 2.8.2.2 In Verbindung mit einem Gleichspannungszwischenkreis Bild 6-2.8 Arbeitsbereiche des Umkehrstromrichters: Bild 7-2.8 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 4 2.8.3 Umkehrstromrichter in Wechsel- und Drehstromsystemen (Direktumrichter) 2.8.3.1 Wechselstromsysteme Wird ein Umkehrstromrichter derart gesteuert, dass er seine Arbeitsbereiche periodisch durchläuft, so entsteht an seinem Ausgang ein Wechselstromsystem. Prinzipielle Anordnung: Bild 8-2.8 Die maximale Ausgangsfrequenz eines Direktumrichters ist begrenzt. Sie beträgt bei einem sechspulsigen Umkehrstromrichter ca. fd Unterlagen zur Vorlesung Leistungselektronik 2 0,8.....0,4 f . Abschnitt 2.8 bis Abschnitt 2.12 Blatt 5 Steuerverfahren: Sinusförmige Stromvorgabe: “Steuerumrichter“ Bild 9-2.8 Vorgabe 0 für ud 0 und ud Vorzeichenwechsel von ud : 0 sowie max (Wechselrichter-Trittgrenze) beim “Trapezumrichter“ Bild 10-2.8 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 6 2.8.3.2 Drehstromsysteme Durch Kombination dreier Umkehrstromrichter ist auch ein dreiphasiger Betrieb möglich, z.B. Speisung der Drehzahlsteuerung langsam laufender Synchron- oder Asynchronmaschinen. Es ist auch ein Betrieb ohne SR-Transformator möglich, da die drei Systeme in der Maschine galvanisch getrennt sind. Nachteil: Hoher Ventilaufwand (Beispiel: 36 Ventile bei Verwendung sechspulsiger Umkehrstromrichter). Prinzipielle Anordnung: Bild 11-2.8 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 7 Übliche Ausführung: Bild 12-2.8 Bei dieser Anordnung ist für eine Potentialtrennung immer ein SR-Transformator erforderlich. Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 8 2.9 Stromrichtermotoren 2.9.1 Stromrichtermotor mit Gleichstromerregung Bild 1-2.9 Charakteristische Merkmale: Das Drehspannungssystem II, welches die Kommutierungen im Stromrichter II bewirkt, resultiert mittelbar aus den in der Statorwicklung der Maschine induzierten Polradspannungen. (“Maschinengeführter“ bzw. “Lastgeführter“ Stromrichter) Die Polradspannungen sind (bei konstanter Erregung) ihrer Frequenz und damit auch der Maschinendrehzahl direkt proportional. (Siehe Bild 2-2.9) Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 9 Bild 2-2.9 Beim Anfahren und bei niedrigen Drehzahlen reichen diese Spannungen meist nicht mehr aus, um die Kommutierungen im Stromrichter II erfolgreich ablaufen zu lassen. Deshalb sind üblicherweise besondere Anlaufhilfen notwendig. Der Blindstrombedarf des Stromrichters II wird von der Synchronmaschine gedeckt, die sich dabei im Betriebszustand “übererregt“ befindet. Bei der Analyse der Kommutierungsvorgänge ist zu beachten, dass bei jeder Kommutierung ein zweipoliger Klemmenkurzschluss der Maschine vorliegt. Diese reagiert bei derartig kurzzeitigen Vorgängen gemäß ihrem sogenannten “subtransienten Ersatzschaltbild“, welches bei einer Vollpolmaschine mit vollständigem Dämpferkäfig das in Bild 3-2.9 gezeigte Aussehen hat. Bild 3-2.9 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 10 Die Kombination Stromrichter II und Synchronmaschine (“Stromrichtermotor“) entspricht dem Prinzip einer “umgekehrten“ Gleichstrommaschine: Die Gleichstromerregung ist vom Stator in den Rotor verlegt, die Ankerwicklung ist vom Rotor in den Stator verlegt und der mechanische Kommutator ist durch den als “elektronischer Kommutator“ fungierenden SR II ersetzt. Steuerung des maschinenseitigen Stromrichters: Bei Taktung durch die Maschinenspannung, genauer durch die Spannung hinter der subtransienten Reaktanz (Frequenz f II) entsteht der “selbstgesteuerte Stromrichtermotor“. Diese Anordnung verhält sich wie eine fremderregte Gleichstrommaschine, die mit einer über den Stromrichter I veränderbaren Gleichspannung gespeist wird. Bei geeigneter Ausführung der Steuergeräte der beiden Stromrichter ergeben sich die in Bild 4-2.9 gezeigten Drehmoment-Drehzahl-Kennlinien. Bild 4-2.9 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 11 Der Drehzahlbereich 0 n nmin kann wegen der genannten Kommutierungsprobleme im Stromrichter II nur mit erheblichen Einschränkungen genutzt werden. Außerdem führt die Speisung der Maschine mit nichtsinusförmigen Strömen zu erheblichen Pulsationen in deren Drehmoment, die sich im Bereich kleiner Drehzahlen störend auswirken können. Bei Taktung durch einen externen Frequenzgeber (mit veränderbarer Frequenz) entsteht der sogenannte “fremdgesteuerte Stromrichtermotor“. Bei diesem handelt es sich zunächst um ein strukturinstabiles System, das aber durch geeignete dynamische Einflüsse auf die Zündverzögerungswinkel des Netz- und/oder des maschinenseitigen Stromrichters stabilisiert werden kann. Dann verhält sich der fremdgesteuerte Stromrichtermotor wie eine Synchronmaschine, deren Drehzahl durch eine gleichsinnige Veränderung der Spannung Ud des netzseitigen Stromrichters und der Taktfrequenz verstellt werden kann. In Bild 5-2.9 ist dies anhand der Drehmoment-Drehzahlkennlinien des fremdgesteuerten Stromrichtermotors zu sehen. Bild 5-2.9 Der in Bild 5-2.9 schraffiert dargestellte Drehzahlbereich entfällt hier völlig. Außerdem können sich auch hier die Drehmoment-Pulsationen der Maschine bei kleineren Drehzahlen störend bemerkbar machen. Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 12 2.9.2 Stromrichtermotor mit Drehfelderregung Bild 6-2.9 Charakteristische Merkmale: Der Stromrichtermotor mit Drehfelderregung entsteht aus dem Stromrichtermotor mit Gleichstromerregung, wenn in dessen Rotor die dort vorhandene GleichstromErregerwicklung nebst Dämpferkäfig entfernt und durch eine Drehfeld-Erregerwicklung ersetzt wird. Der konstruktive Aufbau einer solchen Maschine entspricht somit dem einer Asynchronmaschine mit Schleifringläufer. Bei Speisung der Rotorwicklung mit Drehspannung erzeugt diese ein Drehfeld, das bereits im Stillstand der Maschine in deren Statorwicklung ein Drehspannungssystem induziert und auf diese Weise die Kommutierungen im maschinenseitigen Stromrichter II sicherstellt. Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 13 Von besonderer praktischer Bedeutung ist die Erregung der Maschine aus dem 50 Hz-Drehspannungsnetz. Der nutzbare Drehzahlbereich umfasst jetzt auch die beim Stromrichtermotor mit Gleichstromerregung ausgesparten Bereiche und kann darüber hinaus auch noch geringfügig in den Bereich negativer Drehzahlen ausgedehnt werden. Die zugehörige Spannungs- Drehzahlkennlinie ist in Bild 7-2.9 zu sehen. Bild 7-2.9 Mit einem geeignet ausgeführten Regelsystem weist diese Anordnung eine Reihe hervorragender Eigenschaften auf. Sie eignet sich u.a. auch für Gleichlaufantriebe, bei denen mehrere, über den gemeinsamen Stromrichter II gespeiste, gleiche Maschinen in völligem Gleichlauf zu halten sind. Der Stromrichtermotor mit Drehfelderregung kann auch ohne Schleifringe in völlig kontaktfreier Ausführung gebaut werden, wenn die bisher vorausgesetzte Schleifringläufer-Maschine gemäß Richter, Band 4 durch eine sogenannte Asynchronmaschinenkaskade (Bild 8-2.9) ersetzt wird. Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 14 Bild 8-2.9 Die beiden Läufer haben eine gemeinsame mechanische Welle: fmech Die beiden Läuferwicklungen sind elektrisch “über Kreuz“ (unter Vertauschung der Phasenfolge) verbunden: fLA = fLB (Vertauschung der Phasenfolge ist bereits durch die entgegengesetzte Pfeilung berücksichtigt). Die beiden Ständerwicklungen sind elektrisch getrennt; Die Ständerwicklung der Teilmaschine A ist an ein starres Drehspannungsnetz mit der Frequenz ferr angeschlossen: fSA = ferr Die Ständerwicklung der Teilmaschine B ist an SRII angeschlossen: Unterlagen zur Vorlesung Leistungselektronik 2 fSB = fII Abschnitt 2.8 bis Abschnitt 2.12 Blatt 15 Teilmaschine A z.B. Drehspannungsnetz: ferr 50Hz Ständerfrequenz: fSA = ferr Läuferfrequenz: fLA = ferr + fmech Teilmaschine B Läuferfrequenz: fLB = fLA = ferr + fmech Ständerfrequenz: fSB = fLB + fmech = ferr + 2·fmech Stromrichter SRII: fII Unterlagen zur Vorlesung Leistungselektronik 2 = fSB = ferr + 2·fmech Abschnitt 2.8 bis Abschnitt 2.12 Blatt 16 2.10 Halbgesteuerte Brückenschaltungen 2.10.1 Zweipulsige Brückenschaltungen 2.10.1.1 Symmetrisch halbgesteuerte Brückenschaltung Bild 1-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 17 30º V1I udi us10 V2I V1I us20 I us20 us10 ul10 ul10 udiII udi uAK1I 0 iA1I 2 Id iA2I iA1II Id iA2II i l1 Id 2 Bild 2-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 18 2.10.1.2 Unsymmetrisch halbgesteuerte Brückenschaltung Bild 3-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 19 30º V1I udi us10 V1I us20 I V1II u s20 us10 ul10 ul10 udiII udi uAK1I 0 iA1I 2 Id iA2I iA1II Id iA2II i l1 Id 2 Bild 4-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 20 2.10.1.3 Vergleich der symmetrisch- mit der unsymmetrisch halbgesteuerten Brückenschaltung: Udi Symmetrisch halbgesteuerte Unsymmetrisch halbgesteuerte Brückenschaltung Brückenschaltung 1 U 1 cos 2 di Udi max Udi 1 U 1 cos 2 di max Udi 0 Udi Udi 0 Die Wechselrichtertrittgrenze der kathoden- Die Schonzeit der Thyristoren ist stets gleich gekoppelten Kommutierungsgruppe ist zu der halben Periodendauer der treibenden respektieren und limitiert den Zünd- Wechselspannung. Die gleichgerichtete verzögerungswinkel. Die gleichgerichtete Spannung kann daher bis auf den Wert null Spannung kann deshalb nicht bis auf den vermindert werden. Wert null vermindert werden. Die Stromführungsdauer ist bei allen Ventilen Die Stromführungsdauer der gesteuerten konstant und gleich lang. Ventile nimmt mit zunehmendem Zündverzögerungswinkel ab, die der ungesteuerten Ventile nimmt im selben Maße zu. Die Phasenverschiebung zwischen der Leiterspannung ul1 us1 us2 und dem Lei- terstrom il1 ist bei beiden halbgesteuerten Schaltungen nur halb so groß wie bei der vollgesteuerten Schaltung. Die halbgesteuerten Schaltungen werden deshalb als blindstromsparende Schaltungen bezeichnet. Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 21 2.10.1.4 Kreisdiagramme der voll- und der halbgesteuerten Brückenschaltung Voraussetzung: Idealisierte Theorie 1. Kreisdiagramm der vollgesteuerten Brückenschaltung Wirkleistung: P1 Udi Id cos Grundschwingungsblindleistung: Q1 Udi Id sin Grundschwingungsscheinleistung: S1 P12 Q12 Gleichungen für das Kreisdiagramm: S1 Udi Id P1 S1 cos cos2 sin2 Q1 S1 Udi Id sin Bild 5-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 22 2. Kreisdiagramm der halbgesteuerten Brückenschaltung Bild 6-2.10 Q1: Grundschwingungsblindleistung P1: Wirkleistung S1: Grundschwingungsscheinleistung Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 23 2.10.2 Sechspulsige Brückenschaltung Bild 7-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 24 30º udi V1 V3 us10 V5 us20 us30 I 0 2 us20 udi us30 us10 II 0 2 ul10 ul20 ul30 udi 2 iA1 Id Id iA4 Id i l1 p Bild 8-2.10 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 25 Eigenschaften der halbgesteuerten sechspulsigen Brückenschaltung: Eine “unsymmetrische“ Ausführung der halbgesteuerten sechspulsigen Brückenschaltung ist nicht realisierbar. Bei der Aussteuerung der kathodengekoppelten Kommutierungsgruppe muss die Wechselrichtertrittgrenze beachtet werden. Die gleichgerichtete Spannung kann daher nicht bis auf den Wert null vermindert werden. Udi 1 U 1 cos 2 di 0 Udi Udi 0 Die Welligkeit w der Spannung udi ist für 0 bei der halbgesteuerten sechs- pulsigen Brückenschaltung grösser als bei der vollgesteuerten sechspulsigen Brückenschaltung. Das Kreisdiagramm der halbgesteuerten sechspulsigen Brückenschaltung ist identisch mit jenem der symmetrisch halbgesteuerten zweipulsigen Brückenschaltung. Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 26 2.11 Schaltungen mit Folgesteuerung Ein “blindstromsparendes Verhalten“ kann auch bei der vollgesteuerten Brückenschaltungen erzielt werden, wenn die beiden Teilsysteme getrennt voneinander angesteuert werden. 2.11.1 Zweipulsige Brückenschaltung Bild 1-2.11 Zunächst: Anschließend: 0 I I II Imax Imax Unterlagen zur Vorlesung Leistungselektronik 2 0 0 II IImax Abschnitt 2.8 bis Abschnitt 2.12 Blatt 27 Kreisdiagramm: Q1 S1 vollgesteuerte Schaltung 1 II II II max I I max I II 1 0 1 P1 S1 Bild 2-2.11 2.11.2 Sechspulsige Brückenschaltung Bei der sechspulsigen Brückenschaltung mit Folgesteuerung der beiden Kommutierungsgruppen ergibt sich das gleiche Kreisdiagramm (Bild 2-2.11) wie bei der zweipulsigen Brückenschaltung. 2.11.3 Folgesteuerung zweier in Reihe geschalteter, unsymmetrisch halbgesteuerter Brückenschaltungen Kreisdiagramm: Bild 3-2.11 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 28 Übersichtsschaltbild zweier in Reihe geschalteter, unsymmetrisch halbgesteuerter Brückenschaltungen: Bild 4-2.11 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 29 2.12 Wechsel- und Drehstromsteller 2.12.1 Wechselstromsteller Grundschaltung eines Wechselstromstellers: Bild 1-2.12 2.12.1.1 Phasenanschnittsteuerung bei rein ohmscher Last: R i u uT T1 T1 T2 z. B. u~ 120° 0t u u~ 0t i 0° i iT1 iT1 iT2 0t Bild 2-2.12 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 30 Berechnung der Phasenanschnittsteuerung bei rein ohmscher Last: Ueff,max Ueff0 Ueff,min 0 1 uˆ ~ 2 bei 0 bei 180 0 Steuerbereich: 180 Für die erste Halbschwingung der Spannung u gilt (Bild 2-2.12): 0 u 0V u uˆ ~ sin Berechnung des Effektivwerts der Spannung und des Stromes: Ueff 1 û~ 1 2 u2( ) d 0 Ieff mit 1 Ieff0 1 sin2 2 Ueff0 1 1 sin2 2 1 sin2 2 î 2 Ieff0 î und û~ R Für die Grundschwingung ergibt sich: I1 U = 1 Ieff0 Ueff0 1 2 1 sin2 2 1 1 cos2 4 2 Berechnung der Oberschwingungen: I U = Ieff0 Ueff0 2 1 2 2 1 K1 2 K2 ( 1) mit K1 sin cos cos sin und K2 sin sin cos cos Unterlagen zur Vorlesung Leistungselektronik 2 1 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 31 Maximalwert der Oberschwingungen bei K 1..... Mit (ganzzahlig) K 360 1 max und (je nach Ordnungszahl gibt es unterschiedliche 2.12.1.2 0 max max ). Phasenanschnittsteuerung bei rein induktiver Last: L i T1 u uT u~ T2 z. B. 120° 0t u u~ 0t i 1 udt L 0t Bild 3-2.12 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 32 Der Steuerbereich ist hier eingeschränkt: Es kann keine Beeinflussung für 2 û 0 L sin 2 sin erreicht werden. 2 Für den Strom gilt im Bereich i 2 : 2 2 Ieff 0 Effektivwert der Spannung: Ueff Ueff0 Effektivwert des Stromes: Ieff Ieff0 Grundschwingungen: I1 U = 1 Ieff0 Ueff0 2 4 1 sin2 2 1 1 cos2 2 3 sin2 4 1 sin2 2 Oberschwingungen in der Spannung: U Ueff0 2 1 sin 1 Oberschwingungen im Strom: 1 sin 1 2cos sin I 1 U = Ieff0 Ueff0 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 33 Steuerkennlinien: Bild 4-2.12 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 34 2.12.1.3 Phasenanschnittsteuerung bei gemischt ohmisch-induktiver Last: 120 Beispiel: 120° L R 60 L 60° L i u uT u~ 0t 120° u~ u 0t i 0t 233° (vorher 240°) Bild 5-2.12 Berechnung des Stromverlaufs: û i R2 0 L 2 sin L e tan L Unterlagen zur Vorlesung Leistungselektronik 2 sin L Mit tan L 0 L R Abschnitt 2.8 bis Abschnitt 2.12 Blatt 35 2.12.1.4 Vollschwingungssteuerung (Schwingungspaketsteuerung) Die Vollschwingungssteuerung stellt eine Alternative zur Anschnittsteuerung dar. uT u~ u 0t Bild 6-2.12 Der Vorteil der Vollschwingungssteuerung besteht darin, dass Oberschwingungen mit Frequenzen > 100 Hz sehr gering sind. Dafür erhält man aber stärkere Schwingungen mit Frequenzen < 100 Hz (auch < 50 Hz). Die Vollschwingungssteuerung ist auch für ohmisch-induktive Verbraucher geeignet. Die Einschwingvorgänge mit Gleichstromanteilen können auch dadurch vermieden werden, dass der Steller nicht mit 0 sondern mit Unterlagen zur Vorlesung Leistungselektronik 2 L angesteuert wird. Abschnitt 2.8 bis Abschnitt 2.12 Blatt 36 Anwendungsbeispiele für die Vollschwingungssteuerung: Spannungsverstellung in der Lichtbogenschweisstechnik Temperatureinstellung von Elektroöfen Primärseitige Steuerung von Transformatorgleichrichtern (für Verbraucher mit ungewöhnlichen Impedanzwerten, z.B. Elektrofilter mit U > 50 kV und I < 3 A, oder Galvanikanlagen mit U < 20 V und I > 2...10 kA). Beispiel eines Stromrichters mit Primärsteuerung: (primärseitig gesteuerter Transformatorgleichrichter) Bild 7-2.12 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 37 2.12.2 Drehstromsteller Grundschaltung: Bild 8-2.12 Ohne MP-Verbindung: 0L weist starke Potentialsprünge auf Sperrbeanspruchung der Ventile durch verkettete Spannung besonders hohe Sprünge der Ventilspannungen Mit MP-Verbindung: Es entsteht ein 3 x 2-pulsiges System. Steuerkennlinien: (Ohne MP-Verbindung) Bild 9-2.12 Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 38