KAPITEL I KINEMATIK
Werbung

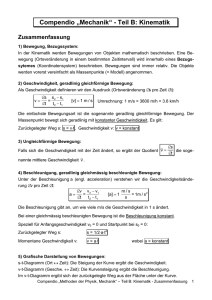
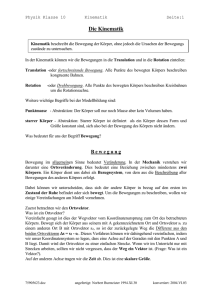
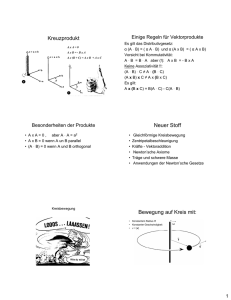
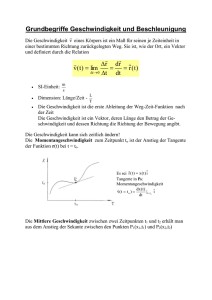
KAPITEL I KINEMATIK 1. GRUNDLAGEN DER KINEMATIK Die Mechanik wird aufgeteilt in die Kinematik und die Dynamik. Die Kinematik beschreibt, wie sich Körper bewegen und nach welchen Gesetzen Bewegungen ablaufen. Die Dynamik fragt nach den Ursachen für bestimmte Bewegungen also nach dem Zusammenhang zwischen Kräften und Bewegungsformen. 1.1 BEZUGSSYSTEM Um Bewegungen von Körpern zu beschreiben, müssen wir immer ein Bezugssystem benutzen, auf das die Bewegung bezogen wird. Es gibt stets mehrere mögliche Bezugssysteme, zwischen denen wir wählen können. In unterschiedlichen Bezugssystemen kann die Bahnkurve einer bestimmten Bewegung unterschiedliche Formen annehmen. BEISPIEL 1 Ein Fahrgast lässt in einem gleichförmig bewegten Zug einen Gegenstand fallen und beobachtet eine geradlinige Bewegung senkrecht nach unten. Für einen Beobachter am Bahnsteig kommt zu dieser Bewegung die des fahrenden Zuges dazu, er sieht eine Parabelbahn. BEISPIEL 2 Ein Radfahrer betrachtet während der Fahrt die Bewegung des Ventils des Vorderrades. Aus seiner Sicht (Bezugssystem Fahrrad) beschreibt das Ventil eine Kreisbahn. Ein am Wegrand stehender Beobachter (Bezugssystem Erdoberfläche) sieht eine Zykloïde (Kurve in roter Farbe). BEISPIEL 3 Ein Kreidestück wird relativ zur Tischfläche gleichförmig auf geradliniger Bahn gezogen. Das Kreidestück streicht dabei an einer rotierenden Scheibe vorbei und zeichnet so eine Bahn auf diese Scheibe ein. Die Bahn relativ zum Bezugssystem „rotierende Scheibe“ ist eine gekrümmte Kurve, relativ zum Bezugssystem „Tisch“ hingegen eine Gerade. Eine besondere Bedeutung haben so genannte Inertialsysteme, die relativ zum Fixsternhimmel ruhen oder sich geradlinig gleichförmig bewegen. Nur in Inertialsystemen gelten die Newton’schen Grundgesetze (Axiome) der Mechanik. Die Erde rotiert relativ zum Fixsternhimmel und ist daher kein Inertialsystem. Bei kurzzeitigen Experimenten und bei nicht zu großer Messgenauigkeit können wir aber von der verhältnismäßig langsamen Erdrotation absehen. Bei unseren Überlegungen kann die Erde als Inertialsystem betrachtet werden. 1.2 MODELL DER PUNKTMASSE Wenn wir im Folgenden von der Bewegung eines materiellen Körpers sprechen, meinen wir eigentlich nur die Bewegung des Massenmittelpunktes. Alle Erscheinungen der Rotation oder Verformung des bewegten Körpers bleiben vorläufig außer Betracht. Nur die Bewegung des Massenmittelpunktes wird untersucht, die Ausdehnung des Körpers wird vernachlässigt → Modell der Punktmasse. KINEMATIK 2 BEISPIEL 1 Betrachtet man das gesamte Sonnensystem, so dürfen die Planeten einfach als Punktmassen angesehen werden, denn ihre Ausdehnung ist im Vergleich zu den ungeheuren Entfernungen im Sonnensystem verschwindend klein. Ähnlich verhält es sich mit den Molekülen eines Gases. Auch sie dürfen im Allgemeinen als Punktmassen angesehen werden. BEISPIEL 2 Die einzelnen Punkte einer rollenden Kugel bewegen sich relativ zu einem Inertialsystem auf komplizierten Bahnen. Nur der Kreismittelpunkt führt eine geradlinige Bewegung aus. 1.3 SKALARE UND VEKTOREN Physikalische Größen, die durch Betrag (Größenwert) und Richtung gekennzeichnet sind, heißen Vektoren. Größen, die bereits durch die alleinige Angabe des Betrages (Größenwert) vollständig bestimmt sind, heißen Skalare. r r r Weg s , Geschwindigkeit v und Beschleunigung a sind Vektoren, gekennzeichnet durch einen Pfeil über dem Formelzeichen. Der Größenwert bzw. Betrag dieser physikalischen Größen schreibt sich s, v oder a. Er ist definiert als Produkt aus Zahlenwert und Einheit. BEISPIEL r s s r Vektor Weg : Betrag und Richtung r Betrag des Vektors s z.B. s = 10 mm z.B. s = 10 mm Zeit t , Masse m oder Temperatur T sind Skalare und durch ihren Betrag eindeutig bestimmt. BEISPIEL m Skalar Masse z.B. m = 10 kg T Skalar Temperatur z.B. T = 373 K Bei Bewegungen in der Ebene oder im Raum, also bei mehrdimensionalen Bewegungen (Kreisund Wurfbewegungen), müssen vektorielle Größen stets als Vektoren (Betrag und Richtung) angesehen werden. Bei geradlinigen, also eindimensionalen Bewegungen, reicht für vektorielle Größen die Angabe des Betrages aus. Die Richtung wird durch unterschiedliche Vorzeichen berücksichtigt. r v + v = + 30 km/h r v v = - 30 km/h 1.4 BESCHREIBUNG VON BEWEGUNGEN Die Bewegung eines Körpers wird durch die Angabe seines Weges s als Funktion der Zeit t beschrieben. Die Funktionsgleichung s = f (t ) oder s = s (t ) heißt Zeit-Weg-Gesetz. Die Zuordnung von Zeit und Weg kann gegeben sein : • durch eine Wertetabelle, die Zeit-Weg-Tabelle, • durch eine Diagramm, das Zeit-Weg-Diagramm, • durch eine Gleichung, das Zeit-Weg-Gesetz. KINEMATIK 3 Um Bahnkurven mathematisch beschreiben zu können, müssen wir vorher ein Koordinatensystem festlegen. Da wir uns vorerst auf geradlinige Bewegungen beschränken, genügt es, nur eine einzige Koordinatenachse zu wählen. Auf unserer Achse wählen wir willkürlich einen Nullpunkt. Dann ordnen wir jedem Punkt auf der Achse als Koordinate seine Entfernung vom Nullpunkt zu. Um Örter gleicher Entfernung vom Nullpunkt eindeutig zu kennzeichnen, vereinbaren wir noch eine Richtung und versehen die Entfernungsangaben noch mit einem Vorzeichen. So erhalten wir die Ortsachse, kurz s-Achse (s vom lat. Wort spatium, Strecke), und aus den Ortsmarkierungen die Ortskoordinaten. Örter, die vom Nullpunkt aus gesehen in Pfeilrichtung liegen, haben stets positive Ortskoordinaten, und Örter in entgegen gesetzter Richtung negative Ortskoordinaten. Δs43 = s3 – s4 s4 = - 9 m s3 = - 4 m Δs34 = s4 – s3 Δs12 = s2 – s1 0 s1 = 3 m Δs21 = s1 – s2 s2 = 10 m s Der zurückgelegte Weg Δs berechnet sich stets aus der Differenz „Endwert minus Anfangswert“. Für Bewegungen in Pfeilrichtung ist der Weg Δs stets positiv, für solche in umgekehrte Richtung immer negativ. BEISPIEL ΔS43 = S3 – S4 = - 4 – (- 9) = + 5 m ΔS34 = S4 – S3 = - 9 – (- 4) = - 5 m Wollen wir die Bewegung eines Körpers längs der s – Achse beschreiben, müssen wir zu jedem Ort mit Ortskoordinate s noch den Zeitpunkt t angeben, zu dem sich der Körper an diesem Ort befindet. Die Zeitspanne Δt um den Weg Δs zurückzulegen berechnet sich gleichsam aus der Differenz „Endwert minus Anfangswert“. Da bei der Zeit der Endwert stets größer als der Anfangswert ist, erhalten wir für die Zeitspanne Δt immer einen positiven Betrag. KINEMATIK 4 2. GERADLINIG GLEICHFÖRMIGE BEWEGUNG Eine geradlinige Bewegung, bei der in gleichen Zeitspannen Δt auch stets gleiche Wege Δs in gleicher Richtung zurückgelegt werden, heißt geradlinig gleichförmig. Bei gleichförmiger Bewegung durchfährt ein Fahrzeug in der doppelten Zeitspanne die doppelte Strecke, in der dreifachen Zeitspanne die dreifache Strecke, usw. Der zurückgelegte Weg Δs ist also direkt proportional zur Fahrzeit Δt. Also ist der Quotient aus Δs und Δt konstant. Bewegt sich das Fahrzeug schneller, erhalten wir einen höheren Quotientenwert; fährt es langsamer, einen kleineren Wert. Dieser Quotient ist geeignet, das Tempo, mit dem sich ein Körper bewegt, zu kennzeichnen. Wir bezeichnen ihn als Geschwindigkeit v. Die Geschwindigkeit v eines geradlinig gleichförmig bewegten Körper ist der Quotient aus dem zurückgelegten Weg Δs und der dafür benötigten Zeitspanne Δt : v Δs Δt = = s − s0 t − t0 mit den Anfangskoordinaten (s0, t0 ) bzw. den Endkoordinaten (s, t ) der Bewegung. Die geradlinig gleichförmige Bewegung ist eine Bewegung mit konstanter Geschwindigkeit : v = v0 = konstant Die Geschwindigkeit ist gleich der Steigung der Geraden im Zeit-Weg-Schaubild (t-s-Diagramm). Die Geschwindigkeit ist eine abgeleitete Größe, da sie mithilfe zweier Basisgrößen, Weg und Zeit, definiert ist. Ihre Einheit ergibt sich aus den Einheiten dieser beiden Grundgrößen [v] = [Δs] [Δt ] 1m 1s m = 1 s = [v] Häufig können wir den Uhrenstand am Anfang so wählen, dass der Anfangszeitpunkt t0 = 0 ist. Dann wird die Zeitspanne Δt = t und das Zeit-Weg-Gesetz schreibt sich v v s − s0 s Δs Δt s − s0 = t = v ⋅t = = s0 + v ⋅ t Die Bewegungsgleichungen der geradlinig gleichförmigen Bewegung schreiben sich mit den Anfangsbedingungen ( s = s0 für t = t0 = 0) v = v0 s = = konstant s0 + v ⋅ t Die Geschwindigkeit lässt sich in einem Zeit-Geschwindigkeit-Diagramm (t-v-Diagramm) darstellen. Die t-v-Kurve der gleichförmigen Bewegung ist eine Gerade parallel zur Zeitachse. Die Rechteckfläche unter der Zeit-Geschwindigkeit-Geraden stellt den zurückgelegten Weg dar. KINEMATIK 5 Bei Bewegungen ist auch deren Richtung von Bedeutung, sodass der Weg außer durch seinen Betrag auch durch seine Richtung bestimmt ist : der Weg ist ein Vektor. Da die Zeit ein Skalar ist, muss die Geschwindigkeit auch ein Vektor sein. Bei einer eindimensionalen Bewegung wird die Vektoreigenschaft des Weges und der Geschwindigkeit am Vorzeichen deutlich. Bei Bewegungen in positiver Richtung der Messstrecke ist Δs > 0 und wegen Δt > 0 ist die Geschwindigkeit v positiv; bei Bewegungen in umgekehrter Richtung ist Δs < 0 und wegen Δt > 0 ist die Geschwindigkeit v negativ. Da die Geschwindigkeit der Steigung der Geraden im Zeit-Weg-Schaubild entspricht, ergibt sich für Bewegungen in positiver Richtung der Strecke eine positive Steigung und für solche in entgegen gesetzter Richtung eine negative Steigung. Häufig können wir jedoch die Anfangskoordinaten so wählen, dass zum Zeitpunkt t = t0 = 0 auch die Ortskoordinate s = s0 = 0 ist. Nur unter dieser Bedingung erhalten wir im Zeit-Weg-Diagramm eine Nullpunktgerade (Ursprungsgerade). KINEMATIK 6 3. DURCHSCHNITTS- UND MOMENTANGESCHWINDIGKEIT s2 s1 t2 t1 Die Darstellung einer Bewegung mit veränderlicher Geschwindigkeit in einem t-s-Diagramm ergibt keine Gerade sondern eine irgendwie gebogene Kurve. In der Abbildung befindet sich der Körper zum Zeitpunkt t1 am Ort s1 und zum Zeitpunkt t2 am Ort s2. Er legt also das Wegintervall Δs im Zeitintervall Δt zurück. Bei einer Bewegung mit nicht konstanter Geschwindigkeit gibt der Quotient Δs/Δt die Durchschnitts- oder Intervallgeschwindigkeit v dar. Die Durchschnittsgeschwindigkeit v = Δs/Δt ist gleich der Steigung der Sekante durch die Punkte P1 und P2. Der Tachometer eines Autos zeigt nicht die Durchschnittsgeschwindigkeit, sondern die Momentangeschwindigkeit an. Auch bei der in der Abbildung durch die Kurve dargestellte Bewegung des Körpers hat dieser zu jedem zwischen t1 und t2 liegenden Zeitpunkt eine bestimmte Momentangeschwindigkeit, die nicht mit der Durchschnittsgeschwindigkeit identisch ist. Soll die Geschwindigkeit im Punkt P bestimmt werden, so kann das Weg- und somit das Zeitintervall Δt immer verringert werden. Es ergibt sich eine Folge von Durchschnittsgeschwindigkeiten bzw. Sekantensteigungen, die sich der Momentangeschwindigkeit, also der Steigung der Tangente zur Kurve im Punkt P, immer stärker annähern. Die Momentangeschwindigkeit v ist identisch mit der Durchschnittsgeschwindigkeit v wenn das Zeitintervall Δt verschwindend klein wird. Die Momentangeschwindigkeit ist der Grenzwert der Folge der Intervallgeschwindigkeiten v = lim Δt →0 Δs Δt Gesprochen „limes Δs durch Δt für Δt gegen Null“. Sie ist die Steigung der Tangente im Zeit-Weg-Diagramm im Punkt P. KINEMATIK 7 4. GERADLINIGE BEWEGUNG MIT KONSTANTER BESCHLEUNIGUNG 4.1 BESCHLEUNIGUNG Das Kennzeichen der geradlinigen Bewegung mit konstanter Beschleunigung ist: Die Geschwindigkeit nimmt mit der Zeit gleichmäßig zu bzw. ab, und demnach liegen im t-v- Diagramm die Wertepaare auf einer Geraden. Die Beschleunigung a wird durch die Steigung der Geraden dargestellt. Es gilt also a = Δv Δt [a] = 1 m/s2 Da die Beschleunigung a = a0 = konstant ist, folgt Δv = a ⋅ Δt . Die Geschwindigkeitsänderung Δv spanne Δt direkt proportional. ist zur zugehörigen Zeit- 4.2 BESCHLEUNIGUNG AUS DER RUHE Wir betrachten zunächst einen Sonderfall: Der beschleunigte Körper ist am Anfang in Ruhe. Des Weiteren werden Ortsmarkierung und Uhrenstand so eingerichtet, dass der Körper zum Startzeitpunkt t = 0 den speziellen Ort s = 0 einnimmt. Seine Bewegung erfolge in Richtung der positiven s – Achse. Dies führt zu folgenden Vereinfachungen : v0 = 0 und Δv = v − v0 = v s0 = 0 und Δs = s − s0 = s t0 = 0 und Δt = t − t 0 = t Das Zeit-Geschwindigkeit-Gesetz Δv = a ⋅ Δt vereinfacht sich zu v = a ⋅ t . v t Die Beschleunigungsstrecke s entspricht der unter der Geraden im t-v- Diagramm liegenden Fläche des rosa gefärbten Dreiecks : s = s = v ⋅t 2 a ⋅t ⋅t 2 v = a ⋅t = 1 2 ⋅ a ⋅t2 KINEMATIK 8 Die Bewegungsgleichungen der geradlinigen Bewegung mit konstanter Beschleunigung sind für die Anfangsbedingungen ( v = 0 und s = 0 für t = 0) a = a0 = konstant v = a ⋅t s = 1 2 ⋅ a ⋅t2 4.3 ALLGEMEINE BEWEGUNGSGESETZE Solche allgemeinen Bewegungen sind z.B das Abbremsen eines Fahrzeugs oder das Beschleunigen eines schon fahrenden Zuges, also Bewegungen wobei am Anfang der Körper bereits eine Geschwindigkeit hat. Die Orientierung der Wegachse wird stets so gewählt, dass die Anfangsgeschwindigkeit v0 einen positiven Wert ab. Dann ist beim Beschleunigen (v2>v1) die Beschleunigung positiv, beim Abbremsen (v2<v1) aber negativ. Eine Bewegung mit negativer Beschleunigung bezeichnen wir als verzögerte Bewegung. Startet die Zeitmessung mit dem Beginn der Beschleunigung so gilt nach der Definition aus 4.1 a = Δv Δt v − v0 . t = Daraus folgt für das allgemeine Zeit-Geschwindigkeits-Gesetz die Gleichung v = v0 + a ⋅ t . Die Flächeninhalte der Trapeze unterhalb der Bewegungsgeraden entsprechen den in dieser Zeit zurückgelegten Strecken s = v0 + (v0 + a ⋅ t ) ⋅t 2 ⇒ s = v0 ⋅ t + 12 ⋅ a ⋅ t 2 Für den Fall, dass sich der Körper bei Beginn der Zeitmessung am Ort s0 befindet gilt für das Zeit-Weg-Gesetz s = s0 + v0 ⋅ t + 12 ⋅ a ⋅ t 2 Die allgemeinen Bewegungsgleichungen der geradlinigen Bewegung mit konstanter Beschleunigung sind für die Anfangsbedingungen (v = v0 und s = s0 für t = 0) a = a0 = konstant v = v0 + a ⋅ t s = s0 + v0 ⋅ t + 12 ⋅ a ⋅ t 2 Ist die konstante Beschleunigung null, so ergeben sich die Gleichungen einer gleichförmigen Bewegung. KINEMATIK 9 5. VEKTOREIGENSCHAFT VON WEG, GESCHWINDIGKEIT UND BESCHLEUNIGUNG Bei geradlinigen eindimensionalen Bewegungen wir die Vektoreigenschaft der Größen Weg, Geschwindigkeit und Beschleunigung dadurch berücksichtigt, dass diese positiv oder negativ sein können. Damit ist ihre Richtung in Bezug auf einen Einheitsvektor angegeben. Vorgänge, die in einer Ebene verlaufen, können in einem zweidimensionalen Koordinatensystem beschrieben werden, wie z.B. bei einem Ruderer, der von einem Ufer eines Flusses zum anderen rudert. sG sR vR vF vG vF sF sF Der Ruderer hat den Eindruck den Fluss senkrecht zu seiner Strömungsrichtung zu überqueren. Gleichzeitig bewegt er sich mit dem Fluss in Strömungsrichtung stromabwärts. Der tatsächliche Weg sG und die tatsächliche Geschwindigkeit vG über Grund lassen sich vektoriell in die Weg- und Geschwindigkeitskomponenten beider Teilbewegungen – Bewegung des Ruderers und Bewegung des Flusses – zerlegen. Weg, Geschwindigkeit und Beschleunigung sind Vektoren und lassen sich dementsprechend in Komponenten zerlegen. Sind die Komponenten bekannt, so ergibt deren vektorielle Addition die tatsächlichen Werte dieser Größen. 5.1 SENKRECHTER WURF NACH OBEN Beim senkrechten Wurf handelt es sich um eine eindimensionale Bewegung entlang der s – Achse in zwei entgegen gesetzte Richtungen. Hypothesen : • s – Achse senkrecht nach oben gerichtet, • Anfangsgeschwindigkeit v0 in Richtung der s – Achse, • für t = 0 gilt s = 0 , v = v0 . Die Bewegung des senkrechten Wurfs wird zerlegt in eine Bewegung mit konstanter Geschwindigkeit v0 nach oben in positiver Richtung der s – Achse s = v0 ⋅ t , v = v 0 , a = 0 und in eine Fallbewegung in entgegen gesetzter Richtung nach unten (daher das Minuszeichen) s = − 12 ⋅ g ⋅ t 2 , v = − g ⋅ t , a = − g wobei g = 9,81 m/s2 die Fallbeschleunigung in Erdnähe darstellt. Die Bewegungsgleichungen des senkrechten Wurfes ergeben sich durch Addition der einzelnen Komponenten von Weg, Geschwindigkeit und Beschleunigung: s = v0 ⋅ t − 12 ⋅ g ⋅ t 2 , v = v0 − g ⋅ t , a = − g Im höchsten Punkt der Bahn ist die Geschwindigkeit null. Daraus lässt sich die Steigzeit th und die Wurfhöhe h ermitteln: KINEMATIK 10 s = v0 ⋅ t − 12 ⋅ g ⋅ t 2 v = v0 − g ⋅ t h = v0 ⋅ t h − 12 ⋅ g ⋅ t h s = h ⇒ v = 0 , t = th 0 = v0 − g ⋅ t h th = v0 g h= v02 g ⋅ v02 − g 2⋅ g2 h= v02 2g s = h ⇒ t = th 2 th = v0 g Der Wurf ist beendet, wenn der Körper wieder am Ausgangspunkt ankommt ⇒ s = 0. Hieraus lassen sich die Wurfdauer te und die Endgeschwindigkeit ve berechnen. s = v0 ⋅ t − 12 ⋅ g ⋅ t 2 t = te ⇒ s = 0 v = v0 − g ⋅ t g ⋅ t e2 2 g ⋅ te ⎞ ⎛ 0 = t e ⋅ ⎜ v0 − ⎟ 2 ⎠ ⎝ 0 = v0 .t e − ve = v0 − g ⋅ ⇒ v = ve 2 ⋅ v0 g ve = v0 − 2v0 2 Lösungen : t e ,1 = 0 = t 0 Wir stellen fest : t = te und t e , 2 = t e = 2 ⋅ v0 g ve = − v 0 - Die Wurfdauer te ist genau doppelt so groß ist wie die Steigzeit th . - Die Endgeschwindigkeit ve hat gleichen Betrag wie die Anfangsgeschwindigkeit v0 aber entgegen gesetzte Richtung. Die Wurfbahn im Zeit-Weg-Diagramm verläuft symmetrisch. Der zweite Teil des senkrechten Wurfs entspricht dem freien Fall aus der Wurfhöhe h . h vh = 0 a = -g a = -g v0 te th -v0 KINEMATIK 11 5.2 WAAGERECHTER WURF Beim waagerechten Wurf handelt es sich um eine zweidimensionale Bewegung in einer senkrechten Ebene; daher ist ein Koordinatensystem mit 2 Achsen nötig zur seiner Beschreibung, Hypothesen : • x – Achse waagerecht in Richtung der Anfangsgeschwindigkeit v0, • y – Achse senkrecht nach unten in Richtung der Fallbeschleunigung g, • für t = 0 gilt s = 0 , v = v0 . In horizontaler x – Richtung bewegt sich der Körper mit der konstanten Geschwindigkeit v0 ; es gelten die Gesetze der gleichförmigen geradlinigen Bewegung s x = v 0 ⋅ t , v x = v0 , a x = 0 . In vertikaler y – Richtung fällt die Kugel; es gelten die Gesetze des freien Falls s y = 12 ⋅ g ⋅ t 2 , v y = − g ⋅ t , a y = − g . Die Gleichung der Wurfbahn ergibt sich aus den beiden senkrecht zueinander stehenden Komponenten sx und sy : s x = v0 ⋅ t sy = g ⋅t2 2 sy = g ⋅ s x2 2 ⋅ v02 sy = g ⋅ s x2 2 ⋅ v02 Die Bahngleichung t= mit sx v0 g = k = konstant 2 ⋅ v02 s y = k ⋅ s x2 ist die Gleichung einer Parabel mit dem Scheitelpunkt im Koordinatennullpunkt und mit der Öffnung in Richtung der y – Achse, also nach unten gerichtet. Die Wurfweite sx,w und die Wurfzeit tw lässen sich aus der Fallhöhe h wie folgt bestimmen : sy = h = 2 x ,w = s x ,w = s g ⋅ s x2 2 2 ⋅ v0 g ⋅ s x2,w 2 2 ⋅ v0 2 ⋅ v02 ⋅ h g 2⋅h ⋅ v0 g sy = h ⇒ s x = s x ,w sy = h = t w2 = tw = g 2 ⋅t 2⋅ g 2 ⋅ tw 2⋅ 2⋅h g s y = h ⇒ t = tw 2⋅h g r Der Geschwindigkeitsvektor v liegt tangential zur Bahnkurve am betrachteten Ort. Seine Richtung ergibt sich durch vektorielle Addition der Komponenten in x- und y- Richtung. Sein Betrag v wird mit dem Satz von Pythagoras bestimmt : v 2 = v x2 + v 2y = v 02 + g 2 t 2 v = v 02 + g 2 t 2 KINEMATIK 12 6. GLEICHFÖRMIGE KREISBEWEGUNG Viele Bewegungsabläufe in Umwelt und Technik sind Kreisbewegungen, bei denen Körper zumindest zeitweise gleichförmig rotieren: Kabine eines Riesenrades, Punkt am Umfang einer Schleifscheibe, Flügelspitze des Rotors einer Windkraftanlage, usw. 6.1 UMLAUFZEIT UND (DREH)FREQUENZ Die Umlaufzeit T ist der Quotient aus der Zeit t von n Umläufen und der Anzahl n dieser Umläufe : T = t n [T] = 1 s Die Frequenz f gibt die Anzahl n der Umläufe pro Zeiteinheit an : f = n t [f] = 1 s-1 = 1 Hz (1 Hertz) Die Frequenz ist der Kehrwert der Umlaufzeit und umgekehrt : T = 1 f und = f 1 T Bei der gleichförmigen Kreisbewegung sind Umlaufzeit und Frequenz konstant ! 6.2 BAHNGESCHWINDIGKEIT r Da Umlaufzeit und Frequenz konstant sind, hat der Vektor der Bahngeschwindigkeit v stets den r gleichen Betrag v = v ; seine Richtung verläuft in jedem Punkt der Kreisbahn tangential zum Kreis und ändert daher fortlaufend seine Richtung. r v r r Bahngeschwindigkeit Radiusvektor/Angabe der Lage des Körpers auf der Kreisbahn r Radius der Kreisbahn r = r r Δϕ vom Radiusvektor in der Zeit Δt überstrichener Winkel oder Drehwinkel oder Bogenmaß ) Δs Bogenlänge oder Kreisbogen Der Betrag der Bahngeschwindigkeit v errechnet sich aus v = Δs Δt v = 2π ⋅ r − 0 T −0 v = 2π ⋅ r T = s1 − s0 t1 − t 0 da T = Wir wählen : t0 = 0 ⇒ s0 = 0 t1 = T s1 = 2π ⋅ r ⇒ 1 f v = 2π ⋅ r ⋅ f KINEMATIK 13 6.3 BOGENMAß UND BOGENLÄNGE Bogenlänge Radius ) Δs = r Bogenmaß = Δϕ Als Einheit vom Bogenmaß erhalten wir : [Δϕ ] = [Δs) ] [r ] = 1m 1m = 1 oder 1 rad ( 1 Radiant ) Wir können also sagen, dass das Bogenmaß keine Einheit besitzt. Um aber deutlich zu machen, dass es sich beim Bogenmaß um ein Winkelmaß handelt, schreiben wir meistens als Einheit 1 rad. ) Aus der obigen Formel lässt sich die Bogenlänge Δs nur errechnen, wenn das dazugehörige Bogenmaß in Radiant ausgedrückt wird. ϕ (°) = ϕ (rad ) ⋅ MERKE : ϕ (rad ) = ϕ (°) ⋅ 180° π π 180° 6.4 WINKELGESCHWINDIGKEIT Die Winkelgeschwindigkeit ω ist der Quotient aus dem im Zeitintervall Δt überstrichenen Winkel Δϕ und dem Zeitintervall Δt . Der Betrag der Winkelgeschwindigkeit ω errechnet sich aus : ω = Δϕ Δt ω = 2π − 0 T −0 ω = 2π T = ϕ1 − ϕ 0 Wir wählen : t1 − t 0 da T = t0 = 0 ⇒ ϕ 0 = 0 t1 = T ⇒ ϕ1 = 2π 1 f ω = 2π ⋅ f Als Einheit der Winkelgeschwindigkeit erhalten wir : [ω ] = [ω ] = [ω ] [Δϕ ] [Δt ] 1 1s 1 = oder s bzw. s −1 [ω ] = [ω ] = [ω ] [Δϕ ] [Δt ] 1 rad 1s 1 rad = s Zwischen der Bahngeschwindigkeit v = 2π ⋅ r ⋅ f und der Winkelgeschwindigkeit ω = 2π ⋅ f besteht eine einfache Beziehung v = ω ⋅r KINEMATIK 14 6.5 ZENTRIPETALBESCHLEUNIGUNG r Die Bahngeschwindigkeit v ist ein Vektor. Bei der gleichförmigen Kreisbewegung hat sie stets den r gleichen Betrag v = v = konstant, ändert aber ständig ihre Richtung. Ihr Vektor zeigt stets in r Richtung der Tangente zum Kreis und steht daher immer senkrecht zum Radiusvektor r . Da jede zeitliche Änderung des Geschwindigkeitsvektors (Betrag und/oder Richtung) eine Beschleunigung bedeutet, liegt also auch bei der gleichförmigen Kreisbewegung (Änderung der Richtung) eine Beschleunigung vor. Die Beschleunigung ist genau wie die Geschwindigkeit ein Vektor. In der Abbildung erkennen wir : r v2 r Δv r r r r r r r = v1 + Δv r r = v2 − v1 r Aus der Definition der Beschleunigung a = Δv / Δt folgt, dass der Beschleunigungsvektor a bei der gleichförmigen Kreisbewegung gleiche Richtung hat wie der Vektor der Geschwindigkeitsänderung r Δv . Da der Betrag der Geschwindigkeit nicht ändert, kann der Beschleunigungsvektor keine Komponente in Richtung des Geschwindigkeitsvektors besitzen; dies ist nur möglich, wenn der Beschleunigungsvektor senkrecht zum Geschwindigkeitsvektor steht. In jedem Bahnpunkt verläuft daher der Beschleunigungsvektor und damit auch der Vektor der Geschwindigkeitsänderung entlang des Bahnradius und zeigt zum Kreismittelpunkt → Radialbeschleunigung oder r Zentripetalbeschleunigung a z . Werden alle Geschwindigkeitsvektoren v1 , v2 , v3 , ... von selben Anfangspunkt aus eingetragen, r so liegen ihre Spitzen auf einem Kreis mit dem Radius v = v . ) Für die Bogenlänge b erhalten wir ) b = v ⋅ Δϕ . ) Wenn Δϕ sehr klein wird, dann sind b und Δv ungefähr gleich, und wir können schreiben Δv = v ⋅ Δϕ . Für den Betrag der Zentripetalbeschleunigung gilt : Δv Δt v ⋅ Δϕ Δt az = az = az = v ⋅ω az = ω ⋅ r ⋅ω Δv Δϕ Δt v = v ⋅ Δϕ = ω = ω ⋅r KINEMATIK 15 ω = az 2 ⋅r da ω = v r 2 az ⎛v⎞ = ⎜ ⎟ ⋅r ⎝r⎠ az = v2 r Die Zentripetalbeschleunigung einer gleichförmigen Kreisbewegung hat den Betrag az = ω2 ⋅r oder a z = v2 . r Der Vektor der Zentripetalbeschleunigung ist stets zum Mittelpunkt (Zentrum) der Kreisbahn gerichtet. KINEMATIK 16