Ein paar Anmerkungen zur Greenschen Funktion
Werbung

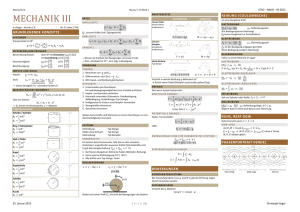
Universität Stuttgart 1. Institut für Theoretische Physik Dr. Holger Cartarius Ein paar Anmerkungen zur Greenschen Funktion Die Greensche Funktion wurde in der Vorlesung als Methode zum Lösen linearer, inhomogener Differentialgleichungen vorgestellt. Auf diesem Blatt sollen ein paar Ergänzungen gegeben und ein paar Fragen aus der Vorlesung aufgegriffen werden. Wie bei vorherigen Blättern dieser Art gilt: Wer sich tiefergehend informieren oder mehr zu physikalischen Anwendungen wissen möchte, greife zu einem mathematischen oder physikalischen Lehrbuch. Beispielsweise bietet das Buch „Mathematical Methods for Physics and Engineering“ von Riley, Hobson und Bence aus der Literaturliste der Vorlesung eine gute Einführung. Mehr zu Anwendungen in der Mechanik findet man im Buch „Klassische Mechanik“ von F. Kuypers, Wiley-VCH. Was ist die Greensche Funktion? Die Greensche Funktion ist die Lösung einer linearen Differentialgleichung (DGL) N -ter Ordnung N X i=0 ai (x) di G(x, z) = δ(x − z) dxi (A) bei der die Inhomogenität aus der δ-Funktion besteht. Sie gilt aber nur für vorher gewählte Rand- oder Anfangsbedingungen, die das Problem eindeutig definieren – bei einer DGL N -ter Ordnung sind das genau N Bedingungen – und in einem vorgegebenen Intervall. Was gewinnt man aus der Greenschen Funktion? Haben wir die Greensche Funktion für die gewählten Rand- oder Anfangsbedingungen im gewünschten Intervall [a, b] aufgestellt, erhalten wir für jede Inhomogenität b(x) die gesuchte Lösung yl (x) der DGL aus dem Integral yl (x) = Z b G(x, z)b(z) dz , (B) a d.h. wir haben – etwas euphorisch ausgedrückt – eine „universelle“ Lösung gefunden. Wir müssen die DGL nicht für verschiedene Inhomogenitäten lösen, sondern müssen „nur noch“ das Integral (B) berechnen. Es soll noch angemerkt werden, dass die Greensche Funktion ihre vollen Fähigkeiten erst beim Lösen partieller Differentialgleichungen entfaltet, die wir in der Vorlesung nicht behandeln können. Hier bieten sich weitaus mehr Gründe, die Greensche Funktion einer anderen Lösungsmethode vorzuziehen. Dafür benötigt man dann aber auch weitere Werkzeuge, die uns noch nicht zur Verfügung stehen. Das Prinzip und die Idee der Greenschen Funktion bleiben aber immer die gleichen, und genau das sollte in der Vorlesung vermittelt werden. Wie kommt man auf diesen Ansatz? Die Differentialgleichung (A) erhält man, wenn man den Ansatz (B) in die ursprüngliche inhomogene Differentialgleichung einsetzt. In der Vorlesung haben wir das für den Fall konstanter Koeffizienten, N X ai y (i) (x) = b(x) i=0 1 (5.19) betrachtet. Wie kommt man aber darauf, das Integral (B) anzusetzen? Dies darf auf dem Stand unserer Vorlesung als Versuch betrachtet werden, der funktioniert hat. Die Lösung (B) war unser Wunsch und wir hatten Erfolg damit, ihn uns zu erfüllen. Etwas plausibler wird der Ansatz erst, wenn man über das hinausgeht, was wir in der Vorlesung behandelt haben und was auch mit diesem Blatt abgedeckt werden kann. Ein wenig mehr Einblick sollte jedoch bereits mit den folgenden Fragen gewährt werden können. Für was benötigt man die Stetigkeits- und Sprungbedingungen aus der Vorlesung? Zur Beantwortung der Frage wiederholen wir, wie die Greensche Funktion aussehen muss. Sie ist Lösung der Differentialgleichung (A) und muss somit für alle x 6= z mit der Lösung der zugehörigen homogenen DGL übereinstimmen. Sie muss also die in der Vorlesung angegebene Form G(x, z) = (P N i=1 ci (z)yi (x) PN i=1 di (z)yi (x) für x < z für x > z (C) mit den N Lösungen yi (x) der homogenen DGL haben. Dabei ist es wichtig, die Lösung in den Bereichen links und rechts von der δ-Funktion getrennt anzusetzen, denn bei x = z wird die Lösung der DGL durch die δ-Funktion in einer Art beeinflusst, wie sie von der Lösung der homogenen DGL nicht erfasst werden kann, dort ist die DGL ja gerade nicht mehr homogen, sondern muss dem (unendlich hohen) Ausschlag der δ-Funktion gerecht werden. Trotzdem sind die beiden Bereiche nicht unabhängig. In der Vorlesung haben wir ausführlich besprochen, wie der Einfluss aussieht. Für die DGL N -ter Ordnung (A) haben wir gesehen, dass die N -te Ableitung bei x = z einen unendlich hohen Sprung haben muss, damit sie (A) erfüllen kann. Daraus konnten wir einen endlichen, eindeutig berechenbaren Sprung für die Ableitung y (N −1) folgern und, dass alle niedrigeren Ableitungen, also y (N −2) bis y (0) (x) = y(x), an dieser Stelle stetig sind. Das sind zusammen N Bedingungen, die exakt festlegen, wie die beiden Lösungen für x < z und x > z miteinander verknüpft sind. Damit ist der ganze Einfluss der δ-Funktion abgedeckt. Wir wissen nun, was mit der Lösung einer DGL passiert, wenn die δ-Funktion als Inhomogenität vorkommt. Der Sprung in der Ableitung y (N −1) ist genau diese Auswirkung. Die ganze Information über die Inhomogenität δ(x − z) steckt in der „Höhe“ des Sprungs. Einen anderen Einfluss hat die δ-Funktion nicht, kann sie auch nicht haben, denn für x 6= z verschwindet sie. Zum Abschluss dieser Frage können wir noch abzählen, ob wir wirklich alle Freiheiten aus dem Ansatz (C) abgedeckt haben. Dieser enthält N freie Integrationskonstanten ci sowie ebenfalls N freie Integrationskonstanten di . Andererseits haben wir die N erwähnten Sprungund Stetigkeitsbedingungen sowie die N bei der ersten Frage erwähnten Anfangs- oder Randbedingungen, für die wir die Lösung der DGL suchen. Den 2N wählbaren Konstanten stehen also genau 2N Bedingungen gegenüber. Damit ist die Greensche Funktion eindeutig bestimmt. Es gibt keine Freiheiten mehr. Wie war das nun mit der physikalischen Interpretation? Die physikalische Interpretation hängt sehr von der Anwendung ab. Am anschaulichsten ist ein Beispiel aus der Mechanik, wie es schon in der Vorlesung erwähnt wurde und das auch hier aufgegriffen werden soll. Betrachten wir z.B. eine (Schwingungs-)DGL der Form ẍ(t) + 2γ ẋ(t) + ω02 x(t) = f (t) 2 mit einer Kraftfunktion f (t) (physikalisch ist dies eine Kraft pro Masse), die eine äußere Anregung beschreibt, also z.B. die Kraft eines Motors, der ein Pendel bewegt. Die Kraft soll etwa die folgende Form haben: f(t) tA t1 t2 tE t Das Aufstellen der Greenschen Funktion bedeutet nun, dass wir die DGL nicht für die Inhomogenität f (t) lösen, sondern, dass wir uns erst für einen unendlich kurzen, auf 1 normierten Stoß zur Zeit τ interessieren. Wir fragen uns, wie reagiert das Pendel auf diesen Stoß. Diese Frage beantworten wir mit dem Lösen der DGL G̈(t, τ ) + 2γ Ġ(t, τ ) + ω02 G(t, τ ) = δ(t − τ ) , die δ-Funktion ist die mathematische Beschreibung dieses Stoßes. Die so gefundene Lösung, die wir G(t, τ ) nennen (Das ist unsere Greensche Funktion!), beschreibt also die Reaktion des Pendels für den Fall, dass es zur Zeit τ angestoßen wird, nichts weiter. Nun aber zurück zu unserer Kraftfunktion f (t). Diese können wir uns zerlegt vorstellen als eine Summe unendlich vieler Stöße, die alle für sich unendlich kurz sind. In der Abbildung oben ist z.B. die Zeit t1 herausgegriffen. Der zugehörige Stoß (Linie bei t1 ) wird mathematisch beschrieben durch f (t1 )δ(t − t1 ), da der δ-Stoß auf 1 normiert ist und f (t1 ) die Kraft zu diesem Zeitpunkt beschreibt. Gäbe es nur diesen einen Stoß, lautete die gesuchte Lösung x1 (t) = G(t, t1 )f (t1 ). Wir müssen also die Greensche Funktion für τ = t1 auswerten, weil der Stoß zu diesem Zeitpunkt stattfinden soll und mit f (t1 ) multiplizieren (Die DGL ist linear!). Nehmen wir noch den Stoß bei t2 hinzu, ist sofort einsichtig (Linearität!), dass die Lösung x1+2 (t) = G(t, t1 )f (t1 ) + G(t, t2 )f (t2 ) lautet. Die gesamte Kraft f (t) erhalten wir, indem wir alle Stöße aufaddieren. Ganz analog erhalten wir die Lösung der DGL für f (t) als die Summe der Reaktionen auf alle Stöße, die im Grenzwert zum Integral Z xf (t) = tE G(t, τ )f (τ )dτ tA wird. Man interpretiert diese Gleichung folgendermaßen: G(t, τ ) sagt uns, wie das Pendel auf den Stoß der Stärke 1 zur Zeit τ reagiert, während f (τ ) uns sagt, wie stark der Stoß zu diesem Zeitpunkt tatsächlich ist. Weil die Differentialgleichung linear ist, können wir nun alle diese Stöße zur Reaktion des Pendels auf die kontinuierliche Kraft f (t) zusammenaddieren. Aus dieser Betrachtung ergibt sich dann auch eine physikalische Motivation für den Ansatz (B). Warum sind homogene Rand- oder Anfangsbedingungen so wichtig? In der Vorlesung wurde erwähnt, dass der dort vorgestellte Weg nur mit homogenen Rand- oder Anfangsbedingungen, d.h. Bedingungen der Form y (i) (xj ) = 0 (Null auf der rechten Seite!), funktioniert. Warum ist das so? Betrachten wir dazu das Beispiel von oben mit den zwei Stößen zu den Zeiten t1 und 3 t2 . Die Greensche Funktion soll so festgelegt werden, dass jede Lösung für jede Inhomogenität die Rand- oder Anfangsbedingungen erfüllt. Erfüllen die Lösungen x1 (t) = G(t, t1 )f (t1 ) und x2 (t) = G(t, t2 )f (t2 ) zum Beispiel einzeln die Anfangsbedingung x(0) = 0, so ist sofort ersichtlich, dass auch die Lösung x1+2 (t) = G(t, t1 )f (t1 ) + G(t, t2 )f (t2 ) die selbe Anfangsbedingung erfüllt, weil sie sich gerade aus der Summe der beiden Lösungen x1 (t) und x2 (t) ergibt. Fordern wir stattdessen zum Beispiel x(0) = 2 wird ebenfalls sofort klar, dass diese Bedingung sich nicht mit der gleichen Greenschen Funktion für sowohl x1 (t) und x2 (t) einzeln als auch x1+2 (t) erfüllen lässt. Wie wir ganz elegant mit inhomogenen Rand- oder Anfangsbedingungen umgehen können, wird in Übungsaufgabe 27 behandelt. Die gleiche Betrachtung gilt natürlich auch für die Lösung (B). Und wie bestimmt man nun die Greensche Funktion für eine gegebene Differentialgleichung? Das wurde so ausführlich in der Vorlesung besprochen, dass dem nichts mehr hinzuzufügen ist. 4