Physikalische Grundlagen der Biomechanik
Werbung

Physikalische Grundlagen
der Biomechanik
Diplomarbeit
zur Erlangung des Magistergrades
an der Naturwissenschaftlichen Fakultät
der Leopold-Franzens-Universität Innsbruck
eingereicht bei
Herrn A. Univ.-Prof. Dr.
Christoph LEUBNER
Institut für Theoretische Physik
von
Florian NEURURER
Innsbruck, Juli 2003
1
Dank
Ich möchte mich bei meinen Eltern bedanken, die stets versuchten, mich bei der
Verwirklichung meiner Träume zu unterstützen und mir dieses Studium ermöglichten.
Ein besonderer Dank gilt auch meinem Betreuer Herrn Christoph Leubner, der mir
einen Großteil meines brauchbaren Fachwissens vermittelte und mich mit viel Einsatz und zahlreichen Verbesserungsvorschlägen bei der Fertigstellung dieser Arbeit
unterstützte.
Recht herzlich bedanken möchte ich mich ebenso bei meinem Freund Paul für die
schöne Studienzeit und die unzähligen grenzgenialen Unterhaltungen.
Meiner Freundin Tina möchte ich ebenfalls danken, da sie mich immer wieder
motivierte und meinen Ausführungen geduldig zuhörte.
2
Für wen und mit welchen Zielvorgaben wurde diese Arbeit
geschrieben?
Ein Großteil meines bisherigen Lebens war vom Sport bestimmt. Bis zu meinem 19.
Lebensjahr hatte ich versucht, im alpinen Skirennlauf den Durchbruch an die Weltspitze zu schaffen, ohne aber diesen Lebenstraum verwirklichen zu können. So entschied ich mich, ein Lehramtsstudium für die Unterrichtsfächer „Mathematik“ und
„Physik“ an der Universität Innsbruck zu beginnen. Mein Herz schlug aber nach wie
vor für den Skisport und deshalb bestritt ich neben dem Studium während dreier weiterer Jahre relativ intensiv Universitätswettkämpfe, die 1997 und 1999 in der Teilnahme an der Universiade (Weltwinterspiele für Studierende) in Muju-Chonchu (Südkorea) und Poprad (Slowakei) gipfelten. Danach übernahm ich bis Dezember 2002
das Training der österreichischen Studenten-Ski-National-Mannschaft. In dieser Zeit
absolvierte ich die österreichische staatliche Trainerausbildung „Ski Alpin“.
Als Trainer machte ich mir bereits Gedanken über die physikalischen Aspekte des
Skilaufs, doch den ersten tatsächlichen Kontakt zur Biomechanik hatte ich während
meiner Trainerausbildung. Im allgemeinen Teil dieser Ausbildung sollte in wenigen
Stunden ein kurzer Einblick in die Aufgabengebiete der Biomechanik geboten werden. Für die meisten Zuhörer waren vor allem die Ausführungen über die verfügbaren Messapparaturen (z.B. Kraftmessplatten) von großem Interesse, und nicht die
physikalischen Grundlagen der Biomechanik. Viele der Teilnehmer hatten schon sehr
lange keinen Kontakt mehr zur Physik, und die wenigsten hatten einen Abschluss
einer höheren Schule. Dieser physikalische Wissenstand machte es dem Vortragenden nicht leicht, den Stoff zu vermitteln. Dazu kam noch erschwerend hinzu, dass der
theoretische Aspekt von vielen, rein aus der Praxis kommenden Trainern, als nicht
wesentlich angesehen wurde. Die Aufarbeitung eines so umfangreichen und komplexen Stoffgebietes in wenigen Stunden ist unter den genannten Bedingungen fast
aussichtslos. Die Grundidee der Physik, mit wenigen Annahmen viele gleichartige
Probleme erklären zu können, fiel dem Zeitdruck zum Opfer. Für mich interessiertem
Physiker brachten die Ausführungen des Vortragenden keinen Gewinn.
Diese Erfahrung weckte mein Interesse, und so fasste ich den Entschluss, mich genauer über Biomechanik zu informieren. Ich begann, Artikel über Skilauf zu lesen,
3
und versuchte mehr und mehr physikalische Überlegungen in meine Korrektur von
Skirennläufern einfließen zu lassen.
Einen weit größeren Bezug zur Biomechanik bekam ich dann am Institut für Sportwissenschaften, wo ich die Vorlesung „Grundlagen der Biomechanik“ besuchte. In
dieser einstündigen Lehrveranstaltung sollten sowohl die physikalischen als auch
anatomisch-physiologischen Grundlagen der Biomechanik vermittelt werden. Die
sehr kurze zur Verfügung stehende Zeit führte manchmal zu Einbußen in der näheren physikalischen Begründung der dargestellten Formeln und Gesetze. Diese Rahmenbedingungen bilden keine optimale Ausgangsituation für die Studenten, um sich
mit den physikalischen Grundlagen der Biomechanik vertraut zu machen.
Diskussionen mit dem Vortragenden während und nach der Vorlesung machten mich
mit diesem besser bekannt, und führten zu einem regen Kontakt zu ihm und dem
Institut für Biomechanik. Durch mein bekundetes Interesse wurde ich später engagiert, um diverse Untersuchungen im Bereich der Biomechanik durchzuführen, wobei
ich hauptsächlich mit dem Österreichischen Skiverband (Ski Alpin) zusammenarbeitete. In Gesprächen mit Sportstudenten während dieser Zeit wurde immer wieder der
Wunsch nach einem verständlichen physikalischen Leitfaden für Anfänger im Bereich
der Biomechanik laut, obwohl bereits ein sehr großes Angebot an Literatur in den
Bibliotheken zur Verfügung steht. Ein Grossteil dieser Bücher ist allerdings auf einem
zu hohen physikalischen Niveau, und außerdem in englischer Sprache verfasst. Dies
erschwert den Sportstudenten die Lektüre zusätzlich und geht an ihren Bedürfnissen
vorbei. Hinzu kommt das unterschiedliche Vorwissen der Studierenden. Einige der
Studenten stammen aus einer technisch orientierten höheren Schule, andere besitzen einen Abschluss eines musisch ausgelegten Gymnasiums.
Aus diesen Gründen habe ich mich entschlossen, ein Skriptum zu verfassen, welches nur das Maturawissen in Mathematik voraussetzt. Ich möchte zeigen, dass
Physik auf diesem Niveau leicht nachvollziehbar ist und keinerlei besondere Fähigkeiten erfordert. Es soll in erster Linie Sportstudenten ansprechen, daneben aber
auch Physiklehrer anregen, die zahlreichen ausgearbeiteten Beispiele aus der sportlichen Lebenswelt der Schüler in ihren Unterricht einzubauen. Sportliche Anwendungen der Physik wecken das Interesse der Schüler.
4
Entsprechend dieser Zielgruppe sollte diese Arbeit ein Nachschlagewerk für grundlegende mechanische Fragen sein, die sich aus dem Bereich der Biomechanik ergeben und eine Begleitung zu den physikalischen Aspekten der Vorlesung „Grundlagen
der Biomechanik“ am Institut für Sportwissenschaften Innsbruck darstellen. Sämtliche
Erklärungen sollten auf wenigen Grundannahmen beruhen, mit deren Hilfe dann ein
großes Repertoire an Problemen gelöst werden kann. Die eigentliche Idee der Physik (für viele zunächst unterschiedlich anmutende Vorgänge mit einer Theorie auszukommen) sollte demonstriert, und so den Lesern die Faszination der Physik nachvollziehbar gemacht werden. Wichtig ist für mich, dass die Sportstudenten ermuntert
werden, die Physik zu verstehen, und endlich vom sturen Einsetzen von Zahlenwerten in auswendig gelernte Formeln loszukommen.
5
Inhaltsverzeichnis
1.
Was ist Biomechanik? .......................................................................................... 7
2.
Die Elemente der Newtonschen Mechanik........................................................... 8
2.1.
2.2.
2.3.
2.4.
Die „Methode der Physik“ in elementarer Darstellung................................... 8
Die Modellierung äußerer Einwirkungen auf reale Körper als „Kräfte“........ 12
Die Modellierung realer Körper als „Massenpunkte“ ................................... 16
Die Modellbausteine „Bezugssystem“, „Bahnkurve“, „Geschwindigkeit“ und
Beschleunigung“ .......................................................................................... 20
2.4.1.
2.4.2.
2.4.3.
2.4.4.
2.5.
Die Verknüpfung der Modellbausteine durch die „Newtonschen Axiome“ .. 28
2.5.1.
2.5.2.
2.5.3.
2.5.4.
2.5.5.
2.5.6.
2.6.
3.
Das „1. Newtonsche Axiom“........................................................................... 29
Das „2. Newtonsche Axiom“........................................................................... 30
Das „3. Newtonsche Axiom“........................................................................... 31
Wie das „1. Newtonsche Axiom“ nicht lautet.................................................. 32
Das „2. Newtonsche Axiom“ ist keine Definition der Kraft.............................. 33
Fehler bei der Anwendung des „3. Newtonschen Axioms“ ............................ 35
Anwendungen der „Newtonschen Axiome“ ................................................. 37
2.6.1.
2.6.2.
2.6.3.
2.6.4.
2.7.
2.8.
2.9.
Das „Bezugssystem“: Allgemeine Bezugssysteme und Inertialsysteme........ 20
„Die „Bahnkurve“ ............................................................................................ 22
Die „Geschwindigkeit“ .................................................................................... 25
Die „Beschleunigung“..................................................................................... 27
Kräfte aus Bahnkurven................................................................................... 37
Bahnkurven aus Kräften................................................................................. 46
Schwerkraftmodellierung in Erdnähe ............................................................. 55
Bestimmung der Masse durch Wägung ......................................................... 56
Newtonsche Mechanik und „Starrer Körper“ ............................................... 57
Der „Schwerpunkt“ eines „Starren Körpers“ ................................................ 58
Die Bewegungsgleichungen des „Starren Körpers“ .................................... 63
Anwendungen der Newtonschen Mechanik auf die Biomechanik...................... 78
3.1.
3.2.
3.3.
3.4.
3.5.
3.6.
Der „freie Fall“ ohne Luftwiderstand ............................................................ 78
Freier Fall mit Luftwiderstand ...................................................................... 83
Der Vorteil schwerer Abfahrer in Gleitstücken ............................................ 89
Der Stabhochsprung.................................................................................... 91
Weshalb „rudern“ Abfahrer bei Geländesprüngen oft mit den Armen? ....... 98
Die Innenlage beim Short Track ................................................................ 100
4.
Literaturverzeichnis........................................................................................... 105
5.
Verzeichnis der Bildquellen .............................................................................. 106
6
1. Was ist Biomechanik?
Biomechanik ist eine „Teildisziplin der Biophysik und untersucht Strukturen und
Funktionen biologischer Systeme unter Verwendung des Begriffsapparates, der Methoden und Gesetzmäßigkeiten der Mechanik“ [Röthig, 1992].
Schränken wir diese recht allgemein gehaltene Definition auf den für diese Arbeit
relevanten Bereich der Biomechanik des Sports ein, ist folgende Charakterisierung
etwas aussagekräftiger: „Die Biomechanik des Sports hat sich als Lehr- und Forschungsgebiet wesentlich im Rahmen der Sportwissenschaften entwickelt. Ihr Gegenstand ist der menschliche Körper und die sportliche Bewegung. Aufgaben sind
die objektive, quantitative Beschreibung und Erklärung der Erscheinungen unter anderem durch vereinfachte Modellierung der im Allgemeinen komplexen Systeme unter weitgehender Verwendung der Sprache der Mathematik“ [Röthig, 1992].
Die oben beschriebene Definition und Beschreibung des Begriffs Biomechanik (des
Sports) ist nur eine der in der Literatur vorzufindenden. Ihre wesentlichen Inhalte,
nämlich die Beschreibung von biologischen Systemen (auf den Sport bezogen) durch
physikalische Modellierungen unter Anwendung der Mathematik, sind aber in allen
Erklärungen zu finden. Aus diesen Erklärungen folgt unmittelbar die Anforderung an
ein Verständnis der Mechanik als Teilgebiet der Physik.
Die Ziele der Biomechanik sind unter anderem: [Nachbauer, 2000]
1. Verbesserung der Technik und des Techniktrainings
2. Verbesserung des Konditionstrainings
3. Verbesserung der Ausrüstung
4. Verhinderung von Schädigungen des Bewegungsapparates.
7
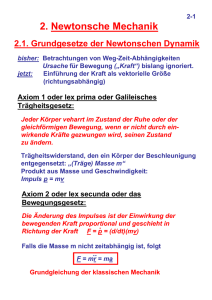
2. Die Elemente der Newtonschen Mechanik
2.1. Die „Methode der Physik“ in elementarer Darstellung
Während die Mechanik Bewegungen von ganz allgemeinen Körpern im Rahmen der
sogenannten „Newtonschen Mechanik“ zu verstehen versucht, beschränkt sich die
Biomechanik auf Bewegungen im Sport. Dabei handelt es sich sowohl um Bewegungen von Sportgeräten als auch um Bewegungen von Sportlern. Die Biomechanik ist
also ein Teil der Mechanik. Um Vorhersagen über den Ablauf von Bewegungen im
Sport machen zu können, müssen wir uns also in den folgenden Abschnitten mit den
Elementen dieser „Newtonschen Mechanik“ vertraut machen.
Dazu ist zu aller erst von Nutzen, uns die typische Vorgangsweise der Physik bewusst zu machen, mit der sie zu „physikalischen Erkenntnissen“ kommt. Diese Vorgangsweise nennen wir im Folgenden kurz die „Methode der Physik“. Leider wird
diese „Methode der Physik“ in der Schule praktisch nicht vermittelt. Deshalb ist auch
bei Sportstudenten darüber nichts bekannt.
Diese „Methode der Physik“ mit ihrem Modelldenken wird in der Diplomarbeit von
Karin Lenz [Lenz, 2002] sehr ausführlich beschrieben, und ihre elementare Darstellung im Folgenden wird sich eng an diese Arbeit anlehnen - allerdings angepasst an
die Bedürfnisse von Sportstudenten.
Die „Methode der Physik“ ist nichts anderes als eine Verfeinerung der von uns Menschen ganz allgemein geübten Praxis beim Verstehen von Vorgängen in unserer Lebenswelt. Erinnern wir uns, als Beispiel für eine Klasse von solchen Vorgängen an
die Zeit, als wir das Fußballspielen noch sehr wichtig nahmen. Eine der größten Herausforderungen stellte damals das gefühlvolle Plazieren des Balles im Kreuzeck dar,
so wie wir es von den großen Fußballstars vom Fernsehen kannten. Allen Kindern,
die es auch so weit bringen wollen, fällt sehr bald auf, dass bestimmte Dinge für den
erfolgreichen Schuss ins Kreuzeck wichtig sind, und andere nicht. So spielen etwa
die Herstellermarke und die Farbe des Balles keine Rolle, wohl aber sein Gewicht
(ob es ein Jugend- oder Erwachsenenball ist), die genaue Bewegung des Beines mit
der zugehörigen Muskelanspannung, und wo sich das Tor relativ zum Abschussort
8
befindet. Waren wir einmal erfolgreich, so versuchen wir auch in Zukunft mit dieser
Bewegung des Beines und dieser Muskelanspannung zum Erfolg zu kommen. Und
wir werden feststellen, dass der Ball immer ins Kreuzeck fliegt, wenn es uns gelingt,
diese offensichtlich wichtigen Merkmale zu wiederholen (wobei wir von Windeinflüssen absehen wollen).
Die nächste Erkenntnis ist, dass diese Merkmale nicht nur für uns selbst, sondern
ganz allgemein wichtig sind. Wenn wir sie einem bewegungsbegabten Spielkameraden mitteilen, der annähernd unseren Körperbau hat, dann kann dieser ohne Training, nur durch genaue Beachtung der von uns erkannten wichtigen Merkmale,
schon beim ersten Versuch ins Kreuzeck treffen. Es spielt also auch keine Rolle, wer
den Ball schießt, solange die wichtigen Merkmale beim Abschuss erfüllt werden.
Wenn wir von einer bestimmten Position regelmäßig ins Kreuzeck trafen, versuchten
wir, dies auch von anderen Positionen aus zu schaffen. Und wieder stellten wir fest,
dass sich der Ball bei entsprechenden „Werten“ der wichtigen Merkmale immer
gleich verhält. Die wichtigen Merkmale sind die gleichen geblieben – bei keiner
Schussposition wird etwa die Farbe des Fußballs zu einem wichtigen Merkmal.
Ganz allgemein sind „wichtige Merkmale“ für uns jene, für die sich das für uns Wichtige des betrachteten Vorganges wiederholt, wenn wir die „Werte“ dieser wichtigen
Merkmale ungeändert lassen. Als „unwichtig“ bezeichnen wir dagegen Merkmale, die
wir verändern können, ohne dass der Vorgang für unsere Maßstäbe anders abläuft.
Da aber verschiedene Leute an einen bestimmten Vorgang verschiedene Maßstäbe
anlegen können, ist die Unterteilung in wichtige und unwichtige Merkmale letztlich
subjektiv. Zum Glück sind wir uns jedoch bei - physikalischen - Vorgängen in der
Biomechanik stets einig, was daran als wichtige Merkmale anzusehen sind und was
nicht! Dass das für uns an biomechanischen Bewegungen Wesentliche immer nur
von einigen wenigen wichtigen Merkmalen abhängt, erleichtert das gesamte motorische Lernen und ein gezieltes Techniktraining ungemein.
Allerdings ist es im Sport nicht immer leicht, den als wichtig identifizierten Merkmalen
einer Bewegung auch genau die richtigen Werte zu geben. Ein Beispiel dafür ist der
sogenannte „Trainingsweltmeister“. So wird ein Sportler bezeichnet, der zwar im
9
Training immer herausragt (also den wichtigen Merkmalen der absolvierten Bewegungen genau die richtigen Werte zu geben versteht), vor Publikum aber regelmäßig
versagt. Man sagt dann meistens, der Sportler sei mental schwach, und meint damit,
dass ihn die Anwesenheit der Zuschauer psychologisch so beeinflusst, dass er sich
nicht mehr darauf konzentrieren kann, den wichtigen Merkmale auch die zum Erfolg
führenden Werte zu geben. Bekanntlich versucht man es in solchen Fällen mit mentalen Trainingsformen.
Wenn wir bei einem Bewegungsablauf die wichtigen von den unwichtigen Merkmalen
zu unterscheiden gelernt haben, und die unwichtigen Merkmale in der Folge weglassen, dann haben wir gedanklich den ursprünglichen Vorgang durch einen einfacheren ersetzt, bei dem nur mehr die wichtigen Merkmale vorhanden sind. Diesen vereinfachten, in der Realität nicht wirklich ablaufenden Vorgang nennen wir ein „Modell“ des ursprünglichen Vorganges.
Haben wir den eigentlichen Vorgang durch ein uns passend erscheinendes Modell
ersetzt, haben also „die Modellierung“ des eigentlichen Vorganges durchgeführt,
dann folgt die Prüfung unseres Modells auf seine Brauchbarkeit. Ein Modell ist dann
brauchbar, wenn es alle jene Züge des Vorganges richtig vorhersagt, die wir als
wichtig einstufen. Tut es dies, dann bleiben wir bei diesem Modell, tut es dies nicht,
dann müssen wir es in der einen oder anderen Richtung verbessern. Im Sport kommen solche Verbesserungsvorschläge für unsere persönlichen Modelle für die Bewegungsabläufe in der betreffenden Disziplin häufig von einem Trainer oder einem
Teamkameraden.
Dies ist bereits alles, was zur „Methode der Physik“ auf elementarem Niveau zu sagen ist. Die beschriebene Vorgangsweise lässt sich sehr einprägsam in einem Diagramm darstellen, das der Diplomarbeit von Karin Lenz [Lenz, 2002] entnommen ist.
In den folgenden Kapiteln werden wir uns an die Teilschritte dieses Diagramms halten.
10
Klasse von realen Vor-
Für die Klasse der ide-
gängen aus der Le-
Unwesentliche Merkmale
alisierten Vorgänge:
benswelt, die physika-
weglassen: ergibt Klasse von
Erfindung eines Mo-
lisch verstanden wer-
idealisierten Vorgängen
dells aus mathemati-
den soll
schen Bausteinen
Von einem
Schluss-
passenden
folgerung
realen Vorgang
aus dem
unwesentliche
Modell im
Merkmale
Rahmen der
weglassen
gewählten
Logik
Passender
idealisierter
Vorgang
Besteht Übereinstimmung
zwischen der Vorhersage
und dazu passendem
idealisiertem Vorgang?
Vorhersage über
einen bestimmten idealisierten Vorgang
Abbildung 2.1.1: Schema des Modellierens und Überprüfens
Die Newtonsche Mechanik wurde geschaffen, um die Ursache von Bewegungen und
deren Verlauf zu verstehen. In diesem Bestreben kam Newton aus der Beobachtung
von Vorgängen in der Natur zur Überzeugung, dass die Bewegung eines bestimmten
Körpers immer mit der Einwirkung von anderen Körpern auf diesen herausgegriffenen Körper in Verbindung gebracht werden kann.
Diese Idee galt es nun in ein brauchbares Modell zu gießen. Was muss dieses Modell leisten? Es muss die Bewegung von Körpern als Reaktionen auf Einwirkungen
aus der Umgebung modellieren.
An dieser Stelle ist es nützlich, sich vor Augen zu halten, das der Satz „die Bewegung von Körpern als Reaktionen auf Einwirkungen aus der Umgebung modellieren“
11
bereits für sich ein Modell ist, denn nur die als wichtig eingestuften Merkmale der
Vorgänge (für Newton Bewegungen von allgemeiner Art; für uns Bewegungen von
Körpern in der Biomechanik) sind darin enthalten. Die als unwichtig eingestuften
wurden bereits weggelassen. Im Unterschied zur Newtonschen Mechanik, die ein
Modell aus mathematischen Bausteinen ist, ist es jedoch ein „verbales Modell“. Es
bestehet aus Wörtern - „Bewegung“, „Körper“, „Umgebung“, „Einwirkung“, „Reaktion“,
und „modellieren“ – zwischen denen es eine Beziehung angibt. Auch wenn solche
„verbalen Modelle“ für physikalische Zwecke zu ungenau sind, sind sie jedoch für
den Menschen mit seiner Sprache unentbehrlich.
Wir gehen nun in den anschließenden Abschnitten daran, die verbalen Bausteine
dieses „verbalen Modells“ Stück für Stück in präzisere mathematische Bausteine zu
übertragen, und werden so auf einsichtige Weise bei der Newtonschen Mechanik
landen.
2.2. Die Modellierung äußerer Einwirkungen auf reale Körper als
„Kräfte“
Da wir gemäß der Überschrift äußere Einwirkungen auf (im einfachsten Fall) einen
realen Körper geeignet modellieren wollen, müssen wir uns zuerst darüber klar werden, was in dem beobachteten Vorgang der „Körper“ und was die „Umgebung“ sein
soll. Dabei macht die Identifizierung des Körpers im Allgemeinen keine Probleme,
wohl aber der zweite Schritt, nämlich den gesamten Rest bewusst als „Umgebung“
des ausgewählten Körpers zu berücksichtigen. In seiner Diplomarbeit zeigt Christian
Pronegg dazu ein junges Paar, das Rücken an Rücken auf einem Surfbrett sitzt
[Pronegg, 1993]. Pronegg bemerkt, dass man einerseits den jungen Mann als den
„Körper“ auswählen kann; dann wird der Rücken der jungen Frau zu einer Einwirkung auf den ausgewählten „Körper“. Oder man kann die junge Frau als „Körper“
auswählen, dann wird dadurch der Rücken des jungen Mannes zu einer Einwirkung
auf den ausgewählten Körper.
Beim Beispiel „Fußball“ waren wir an der Flugbahn des Balles interessiert. Also war
dort der Ball das reale Objekt, und der tretende Fuß des Spielers eine der wesentli12
chen äußeren Einwirkungen auf den Ball und dessen Flugbahn. Eine andere Einwirkung auf die Flugbahn sind die Hände oder Fäuste des gegnerischen Tormannes,
der durch gekonntes Eingreifen verhindern kann, dass die Flugbahn des Balles im
Netz endet.
In einer anderen Situation könnten wir allerdings auch diesen Tormann als den realen Körper betrachten, beispielsweise wenn er gerade einen scharfen Schuss in den
Bauch bekommen hat und sich vor Schmerzen windet. Dann gehörte der Ball, der an
diesen bedauerlichen Zustand des Tormannes schuld ist, nunmehr zu den äußeren
Einwirkungen, die den augenblicklichen Zustand des realen Objektes „Tormann“ herbeigeführt haben.
Wir wählen also das reale Objekt je nach unserer Interessenslage aus, und machen
damit alle anderen Objekte zu dessen Umgebung. Diese Umgebung wird immer in
der einen oder anderen Weise auf das ausgewählte Objekt einwirken. Von dieser
Umgebung lassen wir in der Folge jedoch alles weg, von dem wir glauben, dass es
für die Bewegung des ausgewählten Objektes unwichtig ist. Nur den verbleibenden
kleinen Rest der einwirkenden Umgebung behalten wir weiterhin bei, und es fragt
sich, wie die Newtonsche Mechanik diese wesentlich einwirkende Umgebung behandelt, oder mit den Worten unserer Grafik in Abb. 2.1.1, wie sie diese wesentlich
einwirkende Umgebung modelliert.
Betrachten wir dazu den Schuss beim Fußballspiel noch einmal etwas genauer. Wir
haben schon festgestellt, dass die entscheidende äußere Einwirkung für die anfängliche Bewegung des Balles der Tritt des Spielers ist. Nun könnten wir dem Tritt des
Spielers wieder eine Menge von Eigenschaften zuschreiben. Von diesen sind aber
wieder die meisten für die Vorhersage der Bahnkurve des Balles ziemlich irrelevant,
wie beispielsweise die Marke des Fußballschuhs am Trittfuß. Newton hat nun vorgeschlagen, bei allen mechanischen Einwirkungen auf einen herausgegriffenen Körper
immer alle Eigenschaften bis auf drei wegzulassen. Diese drei verbleibenden Eigenschaften sind die „Stärke“, die „Richtung“ und der „Angriffspunkt“ der Einwirkung.
Weiters schlug er vor, diese drei Eigenschaften mit einem Pfeil zu modellieren, dessen Richtung für die Richtung der Einwirkung, dessen Länge für die Stärke der Einwirkung, und dessen Spitze für den Angriffspunkt der Einwirkung stehen soll.
13
Beim Tritt eines Fußballs ist die Übertragung von Stärke und Richtung des Tritts in
einen entsprechend langen und gerichteten Pfeil unmittelbar einsichtig. Und dass die
Stelle, wo der Ball von diesem Tritt getroffen wird, ebenfalls sehr wichtig ist, wissen
wir von den berühmten Bogenschüssen von Spielern wie Roberto Carlos von Real
Madrid oder von David Beckham von Manchester United.
Abbildung 2.2.1: Modellierung der Einwirkung des Trittfußes als Pfeil
In vielen Fällen unterliegt der herausgegriffene Körper gleichzeitig mehreren Einwirkungen, von denen wir jede für sich als „Kraftpfeil“ modellieren. Für diese Situationen
hat Newton herausgefunden, dass solche Kraftpfeile, wenn sie auf den selben Angriffspunkt wirken, durch einen einzigen „Kraftpfeil“ ersetzt werden können, den man
aus den einzelnen „Kraftpfeilen“ durch die aus der Schule bekannte Vektoraddition
erhält. Und wenn wir außerdem vereinbaren, dass die „Kraftpfeile“ mit Zahlen multipliziert werden können mit der Bedeutung, dass etwa ein mit der Zahl 3 multiplizierter
„Kraftpfeil“ das selbe sein soll wie der drei Mal so lange ursprüngliche „Kraftpfeil“,
dann sehen wir, dass die an einem Angriffpunkt wirkenden äußeren Einwirkungen in
der Newtonschen Modellierung einen Vektorraum bilden, dessen Elemente die
„Kraftpfeile“ sind. In diesem Sinne sprechen wir von nun an nur noch von „Kraftvektor
r
ren“ F . Für das Zusammenwirken mehrerer Kratfvektoren Fi , i = 1,2,3...., an ein und
dem selben Angriffspunkt gilt in dieser Schreibweise also
r
r
r
r
F1 + F2 + F3 + ..... = Fges .
(2.2.1)
14
Abbildung 2.2.2: Vektorsumme der Kräfte
Dank der einfachen Bedeutung des Produktes einer Zahl λ und eines Kraftvektors
mit dem Angriffspunkt P als einem gleich gerichteten Kraftvektor mit der λ-fachen
Länge und dem gleichen Angriffspunkt P, benötigen wir für jeden Angriffspunkt und
jede Richtung eigentlich nur einen einzigen Vektor, aus dem wir alle anderen durch
bloße Multiplikation mit einer Zahl konstruieren können. Aus (2.2.1) sehen wir sogar
weiter, dass wir an einem Angriffspunkt gar nicht für jede Richtung einen eigenen
„Basisvektor“ benötigen, sondern für alle Richtungen reicht eine Auswahl von nur
drei Basisvektoren aus (drei, weil der Raum, in dem sich biomechanische und andere Bewegungen abspielen, dreidimensional ist). Diese einfachen Erkenntnisse werden sich alsbald als recht nützlich erweisen.
Die Modellierung einer Einwirkung auf den uns betrachteten Körper durch einen Vektor macht allerdings nur dann Sinn, wenn wir überhaupt sinnvoll von einem Angriffs“Punkt“ sprechen können. Wenn wir zum Beispiel unsere Hände eincremen, und die
gerade eingecremte Hand als reales Objekt herausgreifen, so ist die andere - eincremende - Hand offensichtlich eine Einwirkung auf die erste. Es lässt sich hier aber
15
offensichtlich kein bestimmter „Angriffspunkt“ angeben, und es macht somit keinen
Sinn, diese Einwirkung mit dem Modell des Kraftvektors zu beschreiben.
Streng genommen lässt sich für überhaupt keine realistische Einwirkung ein „Angriffspunkt“ angeben, da jede Einwirkung räumlich ausgedehnt sein muss, damit sie
überhaupt wirkungsvoll sein kann, das mathematische Modell „Punkt“ jedoch per Definition keine Ausdehnung besitzt. Jede Einwirkung besitzt also eine Angriffsfläche.
Ist diese allerdings im Vergleich zur Oberfläche des Körpers, auf den sie wirkt, klein,
so können wir diese zu einem Angriffspunkt schrumpfen lassen. Falls dies nicht möglich ist, müssen wir zu aufwendigeren Modellen als der Newtonschen Mechanik greifen.
2.3. Die Modellierung realer Körper als „Massenpunkte“
Nachdem wir die Einwirkungen der Umgebung mit Hilfe des „Kraftvektors“ modelliert
haben, wenden wir uns nun einer geeigneten Modellierung von realen Körpern zu.
Zunächst einmal: Was meinen wir überhaupt mit einem „realen Körper“? Darunter
verstehen wir ein Objekt aus unserer Erlebenswelt, das eine deutliche Grenze besitzt. Ein Auto besitzt eine deutliche solche Grenze und ist daher ein Körper. Eine
Duftwolke besitzt dagegen keine solche Grenze, und zählt daher bei uns nicht als
Körper.
Newton fand heraus, dass wir bei der Beschreibung von Bewegungen eines realen
Körpers häufig mit nur zwei wesentlichen Merkmalen auskommen. Diese sind der
augenblickliche „Ort“ des Körpers und seine „Masse“.
Was wollen wir unter dem „Ort“ eines ausgedehnten Körpers (und alle Körper sind
schließlich ausgedehnt!) verstehen? Unmittelbar einsichtig ist das Konzept eines „Ortes“ für einen ausgedehnten Körper dann eine brauchbare Vereinfachung (also Modellierung), wenn seine räumliche Ausdehnung im Verhältnis zu den Dimensionen
der Umgebung des betrachteten Vorgangs klein ist, und wenn wir uns nur für die
grobe Bewegung des Objektes interessieren.
16
Betrachten wir dazu ein Beispiel: Nehmen wir an, wir betrachten während einer
Wanderung durch ein breites Hochtal die Flugmanöver eines Turmfalken bei der Futtersuche. Wenn wir die Dimensionen der Umgebung, also die Breite des Tales und
die Höhe der Nadelbäume an dessen Flanken zu Grunde legen, dann ist die Ausdehnung des Objektes „Turmfalke“ sehr klein dagegen. Aus der Entfernung sehen
wir auch nicht genau, wie es der Turmfalke anstellt, um bald „rüttelnd“ praktisch still
zu stehen, um dann im Sturzflug auf eine Beute herunter zu stoßen. Für die Beschreibung der Grobbewegung des Turmfalken, „Stillstand und Sturzflug“ genügt uns
ein einziger „Ort“. Dem Problem, diesen - zeitlich veränderlichen - Ort genau anzugeben, wenden wir uns im Abschnitt 2.4.1. zu. Aber schon jetzt sollten wir uns bewusst machen, dass die Redeweise „der Turmfalke steht 100 Meter über dem Talgrund in der Mitte zwischen den Talhängen still“, andere Körper (hier z. B. den Talgrund und die das Tal begrenzenden Talhänge) als Bezugspunkte zu Hilfe nimmt.
Diese Einführung eines Bezugssystems wird uns in Abschnitt 2.4.1 gleich eingehender beschäftigen.
Ein (leider sehr unerwünschter!) Bewegungsablauf, bei dem die Angabe eines Ortes
für den betrachteten Körper „Auto“ nicht ausreicht, ist ein Autounfall: Hier geht es neben der genauen Geschwindigkeit – um die genaue Orientierung der Autos der
Unfallgegner unmittelbar vor und nach dem Aufprall. Mit der Angabe eines Ortes ist
dies nicht mehr zu bewerkstelligen. Auf die, diesem komplizierteren Fall angepasste
Modellierung eines Körpers werden wir in Abschnitt 2.7. zurückkommen.
Das zweite Merkmal, von dem Newton zeigte, dass es in einfachen Fällen zusammen mit dem „Ort“ zur Beschreibung der Bewegung eines realen Körpers ausreicht,
ist die „Masse“. Heute haben wir uns an den Begriff „Masse“ bereits derart gewöhnt,
dass wir uns anstrengen müssen, um ihn noch als geniale Erfindung Newtons werten
zu können. Und doch war es ein Geniestreich Newtons zu erkennen, dass sich die
für die Bewegung wichtigen Merkmale eines realen Körpers in vielen Fällen neben
dem „Ort“ durch nur eine einzige weitere Zahl, die man immer mit dem Buchstaben
„m“ bezeichnet, sinnvoll modellieren lassen! Bedenken wir dazu, dass es nicht möglich ist, aus der Betrachtung von realen Bewegungsabläufen die große Nützlichkeit
eines Konzeptes wie der „Masse“ irgendwie „logisch“ abzuleiten. Vielmehr erfordert
es die geniale Kreativität eines Newton, um vorherzusehen, dass sich mit seiner Idee
17
eines Modellbausteins „Masse“ bei der Beschreibung von Bewegungen eine ganze
Menge anfangen lassen müsse; mehr noch: das Konzept „Masse“ hat sich bisher
immer fantastisch bewährt.
Wer mit der Idee der „Masse“ nicht vertraut ist, kann sich auch nicht vorstellen, wie
dieses Konzept bei der Beschreibung von Bewegungen zum Einsatz kommt. Das
besprechen wir in Abschnitt 2.5.2. Und erst dort wird sich aus der Rolle, die die
„Masse“ in der Newtonschen Mechanik spielt, auf reichlich indirekte Weise eine Methode ergeben, um jedem vorgegebenen realen Körper eine zugehörige Massenzahl
m zuzuschreiben. Erst dort werden wir verstehen, warum man diese Zahl m mit Hilfe
einer Waage bestimmen kann. Dies jetzt schon zu sagen, wäre eine leere Behauptung, deren Herkunft wir uns noch nicht erklären können, wenn wir uns nicht damit
zufrieden geben wollen, dass wir sie schon oft gehört und ebenso oft selbst bestimmt
zu haben.
Es ist ein tiefgründiger Sachverhalt, dass die Rolle, die ein als brauchbar angesehener Modellbaustein wie die „Masse“ in dem Gesamtmodell (hier die „Newtonsche
Mechanik“) spielen soll, nicht nach irgendwelchen Regeln abgeleitet werden kann,
sondern erfunden werden muss. Und dass erst aus dieser Rolle im Gesamtmodell
hervorgeht, auf welche Weise wir der Masse jedes vorliegenden Körpers eine Zahl
zuweisen können. Um wenigstens eine Idee von diesen Zusammenhängen zu bekommen, wollen wir eine absichtlich vollkommen an den Haaren herbeigezogenen
Analogie erfinden, die aber die wesentliche Problematik erhellt.
Stellen wir uns ein Schulsystem vor, in dem die Schüler nur durch eigenes Herumprobieren (also ohne Anleitung durch einen Lehrer) „mechanische“ Entdeckungen im
Straßenverkehr machen sollen. Stellen wir uns weiters eine stark von der gegenwärtigen Feng Shui Welle angehauchte Schülerin vor, die irgendwo aufgeschnappt zu
haben glaubt, dass die Sicherheit von Fahrzeugen im Straßenverkehr auch von uralten Feng Shui Weisheiten bestimmt wird (was immer das auch heißen mag). Deshalb
hat sie die Idee, allen Fahrzeugen eine „Feng Shui Zahl“ zuzuordnen, wobei Fahrzeuge mit hoher „Feng Shui Zahl“ unfallsfrei bleiben, solche mit kleiner „Feng Shui
Zahl“ aber häufig in Unfälle verwickelt werden sollten. Nachdem unsere Schülerin
diese Idee – diese Erfindung - geboren hat, steht sie aber vor dem Problem abzuklä18
ren, ob diese Idee für heutige Fahrzeuge überhaupt brauchbar ist, und wenn ja, nach
welchem Verfahren sie einem vorliegenden modernen Fahrzeug die zugehörige
„Feng Shui Zahl“ zuweisen kann. Wenn wir „Feng Shui Esoterik“ durch „Newtonsche
Mechanik“ und „Feng Shui Zahl“ durch „Massenzahl“ ersetzen, dann sind die Probleme dieser Schülerin ganz analog unseren Problemen mit dem Konzept der „Masse“.
In Fällen, wo wir die Beschreibung der Bewegung eines Körpers mit einem „Ort“ und
einer Massenzahl für ausreichend erachten, sprechen wir von der Modellierung des
betreffenden Körpers als „Massenpunkt“. Da wir natürlich auch in diesem Fall die
äußeren Einwirkungen auf diesen Körper als „Kraftvektoren“ modellieren, bleibt diesen als Angriffspunkt nur der augenblickliche Ort des Massenpunktes. Bei einer Modellierung als Massenpunkt müssen wir also die Angriffspunkte aller Kraftvektoren
zusammen fallen lassen.
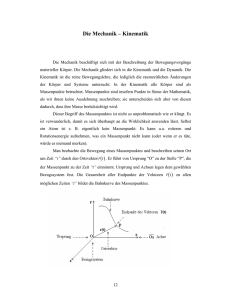
Abbildung 2.3.1: Modellierung einer Skirennläuferin als Massenpunkt. Ihren augenblicklichen Ort
könnten wir etwa durch ihre augenblicklichen Entfernungen d l und d r von der linken und rechten
roten Torstange angeben. An Einwirkungen auf die Rennläuferin erkennen wir unmittelbar die
Schwerkraft, den Luftwiderstand und die Schneekraft (die sie einerseits stützt und andererseits mehr
oder weniger längs der „Ideallinie“ gleiten lässt). Und obwohl die Schwerkraft an ihrem ganzen Körper
angreift, der Luftwiderstand in etwa an ihrer ganzen Vorderseite und die Schneekraft an der gesamten
Schifläche, kommt wegen der Modellierung der Rennläuferin als Massenpunkt als gemeinsamer Angriffspunkt für die diese Einwirkungen modellierenden Kraftvektoren nur der augenblickliche Ort des
Massenpunktes in Frage.
19
2.4. Die Modellbausteine „Bezugssystem“, „Bahnkurve“,
„Geschwindigkeit“ und Beschleunigung“
2.4.1.
Das „Bezugssystem“: Allgemeine Bezugssysteme und
Inertialsysteme
Bisher haben wir uns lediglich bewusst gemacht, dass wir vom „Ort“ eines Massenpunktes nur relativ zu anderen, geeignet gewählten, Körpern sprechen können. Der
Turmfalke „rüttelte“ 100 Meter über der Talsohle und in der Mitte zwischen den beiden Talhängen, die Schirennläuferin war d l Meter von der linken, und d r Meter von
der rechten roten Torstange entfernt. Die Position eines Tennisspielers geben wir
etwa als „am Netz“ an, die eines Fußballspielers etwa als „im Strafraum“, der bekanntlich durch eine weiße Linie gekennzeichnet ist.
Diese Angaben führen uns nachdrücklich vor Augen, dass der Ort eines Körpers nur
relativ zu anderen Körpern angegeben werden kann. Wählen wir andere Bezugskörper, so ändert sich – angepasst an diese geänderten Bezugskörper - unsere Ortsangabe. Der Ort eines Körpers ist daher von der Wahl der Bezugskörper abhängig. Allerdings sind unsere bisherigen Ortsangaben für die meisten Zwecke zu unpräzise.
Für die Marssonde, die während der Abfassung dieser Arbeit gestartet wurde und die
ihre Bahn sehr genau einhalten muss, um ihre Mission erfolgreich durchzuführen,
wäre die Angabe, „sie befände sich gerade auf halbem Weg zwischen der Erde und
Mars“ viel zu ungenau. Und für die Ermittlung des Siegers eines olympischen Marathonlaufs wäre es viel zu unpräzise zu sagen: „Sieger ist der, der als erster ins Stadion zurückkommt“, wenn dies etwa zwei Läufern praktisch gleichzeitig gelingen sollte.
Um unsere Angabe des Ortes eines als Massenpunkt modellierten Körpers genauer
zu machen, ergänzen wir unsere Bezugskörper durch ein so genanntes Koordinatensystem. Am Tennisplatz wird der genaue Ort des Auftreffpunktes des Balles heute
zwar automatisch gemessen, wir könnten aber diesen Punkt und den augenblicklichen Ort einer Spielerin auch an zwei Maßbändern ablesen, die wir an zwei zueinander senkrechten Begrenzungslinien ausgelegt haben, und auf die wir die instantane Position der Spielerin projizieren. Diese Methode liefert uns für jeden Zeitpunkt
zwei Zahlen x( t ), y( t ) . Dabei bedeutet der Buchstabe t („time“) den auf einer Stopp20
uhr abgelesenen Zeitpunkt, zu dem die Koordinaten x( t ) und y( t ) aktuell waren.
Wenn wir diesen „Katalog“ von Zahlenpaaren mit dem Geodreieck auf ein Blatt Papier übertragen, und zu jedem Zahlenpaar die Zeit markieren, zu der dieses Zahlenpaar aktuell war, dann erhalten wir die „Bahnkurve“ des Massenpunktes relativ zu
dem gewählten Bezugssystem. Die Abbildung 2.4.1 veranschaulicht diese Vorgangsweise für ein Fußballfeld.
Abbildung 2.4.1: Position eines ausgewählten Spielers „m“ relativ zu einem Koordinatensystem, das
aus zwei langen Maßbändern besteht, die längs einer Seitenoutlinie und längs einer Toroutlinie ausgelegt sind. Der Schnittpunkt dieser beiden Maßbänder (der mit der Eckfahne zusammenfällt) wird mit
„O“ bezeichnet, was wir wahlweise als „Null“ (für „Nullpunkt“ – dieser Ort hat ja die Koordinaten x = 0
und y = 0), als auch als ersten Buchstaben des englischen Wortes „Origin“ lesen können. Das Diagramm im rechten Bildteil zeigt die Übertragung der zum Zeitpunkt t = t0 aktuellen Koordinaten x(t0) =
a und y(t0) = b des Massenpunktes, mit dem wir den Spieler „m“ modelliert haben, auf ein Blatt Papier.
Zur Angabe der Bahnkurve der Tennisspielerin reichen zwei Zahlen x( t ), y( t ) aus,
da Tennisspieler den Boden nur selten verlassen. Beim Fußballspieler ist dies nicht
so, denn es macht einen Unterschied, ob ein Stürmer nach einer Flanke eines Mitspielers höher springt als ein gegnerischer Verteidiger. In solchen Fällen (von denen
die Bahnkurven eines Diskus, einer Kugel, eines Hochspringers und einer Stabhochspringerin noch markantere Beispiele sind) kommen wir mit zwei Zahlen nicht aus. In
diesen Fällen ergänzen wir die bisherigen beiden Maßbänder durch einen senkrechten Maßstab, auf dem wir eine dritte Positionszahl z( t ) ablesen. Wie im Mathematikunterricht an der Schule eingeführt, schreiben wir diese drei Zahlen in Form einer
Spalte
21
x(t )
r
x (t ) = y (t )
z (t )
(2.4.1.1)
zusammen. Wenn wir nur einen einzigen Zeitpunkt t = t0 im Auge haben, dann nennen dieses Objekt den „Ortsvektor“ (diese Redeweise ist eigentlich nicht korrekt, führt
aber in der von uns hier angestrebten elementaren Darstellung der Mechanik zu keinen Problemen) des betrachteten Massenpunktes zur Zeit t = t0 . Interpretieren wir
aber das Objekt (2.4.1.1) als Stellvertreter aller im Laufe eines ganzen Zeitintervalls
von unserem Massenpunkt eingenommen Orten, dann nennen wir (2.4.1.1) – wie
schon benutzt - die „Bahnkurve“ des Massenpunktes, von der nun genauer die Rede
sein soll.
2.4.2.
„Die „Bahnkurve“
Schon bei der Einführung eines Bezugssystems zur Angabe der aufeinander folgenden „Orte“ eines als Massenpunkt modellierten Körpers – also seiner „Bahnkurve“ war klar, dass das, was sich uns nach der Übertragung dieser Bahnkurve auf ein
Blatt Papier darbietet, ganz wesentlich von der Wahl des Bezugssystems abhängen
wird. Da dieser Umstand für die Newtonsche Mechanik von grundlegender Bedeutung ist, müssen wir uns damit näher befassen. Gerade im Sport werden die verschiedensten Bezugssysteme verwendet.
So liefert bei der TV-Übertragung hochkarätiger Leichtathletik-Meetings eine auf
Schienen neben den 100 m-Sprintern gleichmäßig entlang bewegte Kamera packende Bilder. Da der TV-Zuschauer natürlich die Umrandung der Mattscheibe seines
Fernsehgerätes als Bezugssystem verwendet, ordnet er den Läufern ganz andere
Bahnkurven zu als ein Zuschauer auf der Tribüne, der die Laufbahn als Bezugssystem verwendet (also etwa die Startlinie als gedachte x-Achse, und den Außenrand
der Laufbahn als gedachte y-Achse). Die Abbildung 2.4.2 zeigt zwei Bildfolgen, wie
sie mit einer ruhenden und einer mitgeführten Kamera aufgenommen wurden. Mit
dem Bildrand als natürlichem Bezugssystem ergeben sich daraus unterschiedliche
Bahnkurven für denselben realen Vorgang.
22
Abbildung 2.4.2: Mitbewegte Kamera
Ruhende Kamera
Das natürliche Bezugssystem ist in beiden Fällen der Bildrand der Aufnahme: Für denselben realen
Vorgang werden unterschiedliche Bahnkurven erhalten.
Unter den bei Sportübertragungen benutzten Bezugssystemen ist die auf Schienen
gleichmäßig mit Läufern mitgeführte Kamera ein besonders einfacher Ausnahmefall.
Im Allgemeinen sind die verwendeten Bezugsysteme viel komplizierter. Denken wir
nur, als einem Beispiel unter vielen ähnlichen, an die Übertragung eines SchiGroßereignisses wie den Slalom am „Ganslernhang“ in Kitzbühel (vgl. Lenz, 2002).
Die Kameraleute des ORF (die ja die Spezialisten für Schiübertragungen sind) versuchen natürlich, den TV-Zuschauern den gerade fahrenden Läufer vom Start bis ins
Ziel in Großaufnahme, d.h. möglichst immer in der Mitte des Kamerabildes, zu zeigen. Die Kamera schwenkt also möglichst immer mit den rasch aufeinanderfolgenden Richtungswechseln des Läufers mit. Da der TV-Zuschauer natürlich wieder die
Berandung seines TV-Gerätes als Bezugssystem wählt, setzen sich für ihn die in
diesem Bezugssystem aufeinanderfolgenden Orte des Läufers zu einer komplizierten
Bahnkurve zusammen, die ähnlich wie der Faden eines Wollknäuels immer mehr
oder weniger um die Mitte des TV-Bildschirmes „kreist“. Wir nennen ein solches Bezugssystem ein „mit dem beschriebenen Körper mitbewegtes“ Bezugssystem. Auch
die neben der Laufbahn mitbewegte Kamera vermittelte ein „mitbewegtes Bezugssystem“, nur war es wegen der gleichmäßigen geradlinigen Bewegung der Läufer
von viel einfacherer Art als das Bezugsystem bei der Schiübertragung. Wegen der
äußerst raschen Richtungswechsel des Slalomläufers kann von einer gleichmäßig
bewegten Kamera keine Rede sein. Auf ein einfaches Bezugssystem würde der TVBetrachter nur dann reduziert, wenn die TV-Kamera beispielsweise wegen extrem
tiefer Temperaturen in einer bestimmten Position festfrieren würde. Dann würde man
23
für die kurze Strecke, auf der die Läufer eventuell noch sichtbar wären, eine Bahnkurve relativ zu einem „einfachen“ Bezugssystem erhalten.
Um später Newtonsche Mechanik treiben zu können, müssen wir den bisher bloß
qualitativ getroffenen Unterschied zwischen „einfachen“ und „komplizierten“ Bezugssystemen schärfer herausarbeiten. Für die Zwecke der Beschreibung von biomechanischen Bewegungen im Rahmen der Newtonschen Mechanik ist jedes mit der Erde
fest verbundene Bezugssystem in ausreichender Genauigkeit ein „einfaches“ Bezugssystem. Man beachte, dass dies keineswegs eine Definition ist, sondern ein
empirischer Befund, der sich erst durch die erfolgreiche Anwendung der Newtonschen Mechanik ergeben hat. Unter unseren bisherigen Beispielen waren die Maßbänder entlang des Tennis- und des Fußballplatzes, sowie die festgefrorene Kamera
mit der Erde festverbundene Bezugssysteme, und daher „einfach“. Ab jetzt werden
wir jedoch nicht mehr von „einfachen“, sondern von inertialen Bezugssystemen sprechen.
Darüber hinaus ist jedes gegen die Erde mit gleichmäßiger Geschwindigkeit längs
einer geraden Linie bewegtes Bezugssystem ebenfalls „inertial“. Unter unseren bisherigen Beispielen stellte die auf Schienen längs des Randes der Laufbahn (der ja
eine gerade Linie bildet) mit gleichbleibender Geschwindigkeit geführte Kamera ein
solches „inertiales“ Bezugssystem dar. Dagegen stellt die dem Slalomläufer bei all
seinen Richtungsänderungen ständig folgende Kamera ein „nichtinertiales“ Bezugssystem dar.
Für die Newtonsche Mechanik besteht nun der ganz und gar wesentliche Unterschied zwischen „inertialen“ und „nichtinertialen“ Bezugssystemen darin, dass die
Newtonschen Bewegungsgesetze aus Abschnitt 2.5. nur in inertialen Bezugssystemen gelten. Ein bestimmtes nichtinertiales Bezugssystem, das man gerne benutzen
möchte, weil in ihm die vorliegende oder die gesuchte Bahnkurve besonders einfach
aussehen, kann allerdings dann verwendet werden, wenn man weiß, wie dieses bestimmte „nichtinertiale“ Bezugssystem mit einem „inertialen“ Bezugssystem zusammenhängt. Dies ist auch durchaus einleuchtend, weil man sich dann ja immer auf
das „Inertialsystem“ zurückziehen kann. In einem solchen Fall formuliert man die
Newtonschen Bewegungsgesetze zuerst im betreffenden Inertialsystem, wo sie ja
24
gültig sind (vgl. Abschnitt 2.5.), und rechnet sie dann auf das bequemere Nichtinertialsystem um. Ein sehr häufig verwendetes nichtineritales Bezugssystem rotiert gegen die Erde mit gleichbleibender Winkelgeschwindigkeit. Man beachte, dass die
Formulierung „rotiert gegen die Erde mit gleichbleibender Winkelgeschwindigkeit“
gerade den oben geforderten Sachverhalt ausdrückt, dass wir bei Verwendung eines
„Nichtinertialsystems“ (etwa eine rotierende Scheibe als Bezugskörper) genau wissen müssen, wie es sich gegen ein „Inertialsystem“ (z. B. die Erde) bewegt.
2.4.3.
Die „Geschwindigkeit“
Die instantane Geschwindigkeit eines als Massenpunkt modellierten Körpers ist ein
wichtiger Modellbaustein der Newtonschen Mechanik. Da dieser Begriff aus der
Schulphysik einigermaßen vertraut sein dürfte, können wir uns kurz halten.
r
Durchläuft der Massenpunkt die Bahnkurve x (t ) , so betrachten wir im ersten Schritt
r
r
r
die Änderung der Position des Massenpunktes ∆x (t ) = x (t2 ) − x (t1 ) im dazugehörenr
r
r
den Zeitintervall ∆t = t2 − t1 . Der Vektor ∆x (t ) = x (t2 ) − x (t1 ) stellt den Sehnenvektor
r
r
vom Punkt x( t1 ) zum Punkt x( t2 ) der Bahnkurve dar. Im nächsten Schritt bilden wir
r
∆x (t )
und lassen das Zeitintervall ∆t gedanklich immer kleiner werden Quotienten
∆t
den. Wie aus der Schulzeit bekannt ist, erhalten wir so die „Ableitung des Ortes nach
r
der Zeit“. Der so gewonnene Vektor wird in der Physik als „Geschwindigkeit“ v ( t )
bezeichnet.
r
r
∆x (t ) dx (t ) r
=
lim ∆t → 0
:= v (t )
∆t
dt
Die „Geschwindigkeit“ des Massenpunktes ist somit wieder von der Zeit t abhängig
und ebenfalls eine vektorielle Größe. Aus der Art des Zustandekommens der Geschwindigkeit ergibt sich deren Einheit zu [ m ]. Analog zur Darstellung (2.4.1.1) des
s
Ortsvektors stellen wir auch die Geschwindigkeit als Spalte dann dar, wenn wir ihre
drei Komponenten explizit sichtbar machen wollen:
25
v x (t )
r
v (t ) = v y (t )
v z (t )
Der Betrag des Geschwindigkeitsvektors,
r
v (t ) = v x (t ) 2 + v y (t ) 2 + v z (t ) 2 ,
gibt Auskunft über die Größe der Geschwindigkeit zum Zeitpunkt t. Die Richtung der
Geschwindigkeit zu einem Zeitpunkt t ist als Grenzwert des Sehnenvektors immer
r
tangential zur Bahnkurve im Punkt x( t ) . Die Bahnkurve zusammen mit einer Reihe
von maßstabsgetreuen Geschwindigkeitsvektoren ergibt einen guten Eindruck über
den Verlauf der Bewegung. Beim Auto Fahren gibt uns der Tachometer Auskunft über den Betrag der Momentangeschwindigkeit, und deren Richtung ergibt sich aus
der Tangente an die Fahrlinie. Die Geschwindigkeitsvektoren zu aufeinander folgenden Zeitpunkten ergeben den so genannten „Geschwindigkeitsverlauf“.
Abbildung 2.4.2: Richtung der Geschwindigkeit
Betrag der Geschwindigkeit (in km/h)
26
2.4.4.
Die „Beschleunigung“
In der Newtonschen Mechanik hat die Geschwindigkeit vor allem als Ausgangsgröße
r
für den noch viel wichtigeren Modellbaustein „Beschleunigung“ a (t ) Bedeutung.
Newton hat nämlich festgestellt, dass zur Beschreibung der Reaktionen eines als
Massenpunkt modellierten Objektes, auf eine Einwirkung aus seiner Umgebung ein
weiterer Modellbaustein, eben die Beschleunigung, notwendig ist.
Wir konstruieren diesen Modellbaustein „Beschleunigung“ an einem bestimmten
r
r
Bahnpunkt x( t1 ) , indem wir den Geschwindigkeitsvektor v ( t2 ) vom etwas späteren
r
r
Bahnpunkt x( t2 ) zum Geschwindigkeitsvektor v ( t1 ) parallel verschieben. Auf diese
r r
r
Weise erhalten wir einen Differenzvektor ∆v = v ( t2 ) − v ( t1 ) , den wir wieder durch das
dazugehörende Zeitintervall ∆t = t2 − t1 dividieren. Indem wir es gedanklich immer
kleiner werden lassen, gehen wir zum Grenzwert bzw. zur Ableitung über:
r
r
∆v ( t ) dv ( t ) r
=
=: a( t )
lim∆t →0
∆t
dt
(2.4.4.1)
Da wir die Geschwindigkeit durch Ableiten der Bahnkurve berechnet haben und wir
diese nochmals ableiten müssen, um auf die Beschleunigung zu kommen, können
wir die Beschleunigung auch direkt durch zweifache Ableitung der Bahnkurve nach
der Zeit berechnen,
r
2r
r
dv (t ) d x (t )
=
.
a (t ) =
dt
d ²t
Dass gerade diese Größe eine - wie wir im nächsten Kapitel sehen werden – in der
Newtonschen Mechanik eine so bedeutende Rolle spielt, ist natürlich keineswegs
selbstverständlich. Erst durch die nachgewiesene fantastische Brauchbarkeit des
Gesamtmodells der Newtonschen Mechanik erhält dieses Konzept seine Bedeutung.
Es wäre zumindest eine Welt vorstellbar, in der die Ableitung der Beschleunigung die
zentrale Rolle spielt, so wie es in der Vorstellung des Aristoteles die Geschwindigkeit
(und nicht die Beschleunigung war), auf die es anzukommen schien.
27
Wie bei der Geschwindigkeit handelt es sich bei der Beschleunigung um eine vektorielle Größe, und die Einheit ergibt sich zu [ ms −2 ]. Häufig verwendete Bezeichnungen
für Geschwindigkeit und Beschleunigung sind auch
r r
v = x ′ = x&
r r r
a = v ′ = x ′′ = &x&
wobei „Striche“ und „Punkte“ die Zahl der Ableitungen symbolisieren, die wir ausführ
ren müssen, um diese aus der Bahnkurve x( t ) zu erhalten. „Geschwindigkeit“ bzw.
„Beschleunigung“ beziehen sich immer auf einen bestimmten Zeitpunkt und werden
deshalb häufig als „Momentangeschwindigkeit“ bzw. „Momentanbeschleunigung“
bezeichnet.
Viel wichtiger für das Verständnis der Newtonschen Mechanik ist aber für uns die
Tatsache, dass die „Beschleunigung“ eines Massenpunktes auf eine ganz bestimmte
Weise einzig und allein aus seiner Bahnkurve gewonnen wird.
2.5. Die Verknüpfung der Modellbausteine durch die „Newtonschen
Axiome“
Wir haben jetzt alle Modellbausteine der Newtonschen Mechanik für die Beschreibung von jenen einfachen Bewegungen zusammen getragen, wo die bewegten Körper als Massenpunkte modelliert werden können. Aber wie beim Hausbau ergibt erst
der geeignete Zusammenbau dieser Bausteine daraus ein tragfähiges Gebäude.
Für Körper, die als Massenpunkte modelliert werden können, schaffte Newton dies
mit der Formulierung von drei Zusammenhängen zwischen den Bausteinen „Bezugssystem für die Registrierung der Bahnkurve des Massenpunktes“, „Masse des Massenpunktes“
„Gesamtkraft(vektor)
auf
den
Massenpunkt“,
und
„Beschleuni-
gung(svektor) des Massenpunktes“. Diese werden meist als die „drei Newtonschen
Axiome“ bezeichnet. Obwohl es nur drei sind, werden sie häufig falsch wiedergegeben und interpretiert, und Schüler und Studenten bekommen so ein falsches Bild der
28
Mechanik. Zum besseren Verständnis wird zuerst jedes Axiom erläutert und erst
dann kurz und prägnant formuliert.
2.5.1.
Das „1. Newtonsche Axiom“
Nach Abschnitt 2.4.1. können wir die uns interessierenden Bewegungen in verschiedenen Bezugssystemen betrachten. Je nach der getroffenen Wahl eines Bezugssystems erhalten wir unterschiedliche Bahnkurven für den als Massenpunkt modellierten
realen Körper. Wenn wir den Modellbaustein „Beschleunigung“ immer nach dem Verfahren von Abschnitt 2.4.4. gewinnen (und dies wollen wir vereinbaren), dann werden
wir für ein und dieselbe Bewegung klarerweise zu unterschiedlichen Beschleunigungen geführt.
Andererseits ist es das Ziel der Physik, in der Natur „Muster“ oder „Regelmäßigkeiten“ zu entdecken. Was sind aber “Muster“ und „Regelmäßigkeiten“? Das ist Etwas,
was bei genauerem Hinsehen eine ganze Anzahl von Phänomenen gemeinsam haben, die auf den ersten Blick nichts mit einander zu tun zu haben schienen. Wenn wir
also die „Beschleunigung“ nach Newton als grundlegenden „Modellbaustein“ für die
Beschreibung der Bewegung eines bestimmten Körpers ansehen, dann sollte diese
Beschleunigung für die Bahnkurven, die man für diese Bewegung relativ zu verschiedenen Bezugssystemen erhält, immer die gleiche sein. Dies ist aber natürlich
nicht für alle vorstellbaren Bezugssysteme möglich, wohl aber für eine große Klasse
von Bezugssystemen, nämlich für die in Abschnitt 2.4.1. diskutierten „Inertialsysteme“. Das „1. Newtonsche Axiom“ besagt genau das: „Nur bei Beschleunigungen, die
wir aus Bahnkurven relativ zu „Inertialsystemen“ gewonnen haben, handelt es sich
um Modellbausteine der Newtonschen Mechanik. Solche Beschleunigungen werden
r
deshalb als „Newtonsche Beschleunigungen“, aNewton (t ) bezeichnet, und nur für diese
gilt das „2. Newtonsche Axiom“:
•
„1. Newtonsches Axiom“:
Um die Newtonsche Mechanik anwenden zu können, benötigen wir spezielle Bezugssysteme, Inertialsysteme genannt. Ein Inertialsystem ist ein Bezugssystem, bei
dem sich ein als kräftefrei bekannter und als Massenpunkt modellierter Körper mit
29
r
r
konstanter Geschwindigkeit v ( t ) = v0 bewegt. Nur aus einer (auf die Einwirkung beliebiger Kräfte zurückgehende) Bahnkurve, die relativ zu einem Inertialsystem aufgezeichnet wurde, erhalten wir jenen Modellbaustein „(Newtonsche) Beschleunigung“
r
aNewton (t ) , auf den sich das 2. Axiom bezieht.
2.5.2.
Das „2. Newtonsche Axiom“
Mit der zu Grunde Legung eines Inertialsystems haben wir die Voraussetzungen für
die Gültigkeit der zwei weiteren Axiome geschaffen. Ohne zunächst die einwirkenden
Kräfte berücksichtigen zu müssen, können wir zu jedem Zeitpunkt t aus der zu diesem Inertialsystem gehörenden Bahnkurve eine Beschleunigung (des als Massenpunkt modellierten Körpers) angeben, die für alle Inertialsysteme der selbe Vektor
r
aNewton (t ) ist.
Anschließend wenden wir uns der Frage zu, wie die Umgebung auf unseren Massenpunkt einwirkt und setzen voraus, dass wir immer alle Einwirkungen kennen und
als Kraftvektoren modellieren können. Schließlich ersetzen wir mehrere auf den
r
Massenpunkt wirkende Kraftvektoren durch eine resultierende Kraft Fges (t ) .
In einem weiteren Schritt nehmen wir noch an, dass wir dem von uns als Massenpunkt modellierten Körper eine Massenzahl m zuordnen können. Damit sind wir nun
mehr in der Lage, das „2. Newtonsche Axiom“ zu formulieren
•
„2. Newtonsches Axiom“:
Für einen als Massenpunkt modellierten realen Körper ist zu jedem Zeitpunkt t die
r
Vektorsumme Fges (t ) aller einwirkenden Kraftvektoren gleich dem Produkt aus der
r
Masse m und der Newtonschen Beschleunigung aNewton (t ) :
r
r
ma Newton (t ) = Fges (t ) .
(2.5.2.1)
30
Aus dem Produkt der Einheiten der Beschleunigung [m/s2] und der Masse [ kg ] auf
der linken Seite von (2.5.2.1) ergibt sich die Einheit der Kraft zu [kg m/s2], welche
kurz als „Newton“ [ N ] bezeichnet wird.
2.5.3.
Das „3. Newtonsche Axiom“
Zur Vorbereitung des „3. Newtonschen Axioms“ betrachten wir nochmals das Beispiel des Fußballspielers aus Abschnitt 2.2. Wir stellten dort fest, dass ein scharfer
Schuss in den Bauch des Tormannes als eine Einwirkung auf diesen mit einem
r
Kraftvektor FBall _ auf _ Tormann modelliert werden kann. Wählen wir andererseits den Ball
als unseren herausgegriffenen Körper, so stellt der Tormann umgekehrt eine Einwirr
kung auf dessen Bahnkurve dar, welche wir mit einem Kraftvektor FTormann _ auf _ Ball modellieren.
Newton hat nun postuliert, dass diese zwei Kraftvektoren eng zusammen hängen,
nämlich als
r
r
FTormann _ auf _ Ball = − FBall _ auf _ Tormann .
Allgemein formuliert lautet das „3. Newtonsche Axiom“ so:
•
Drittes Newtonsches Axiom:
Wenn zwei sich gegenseitig beeinflussende Körper K1 und K2 vorliegen, dann können wir einmal den Körper K1 als unser reales Objekt herausgreifen. Dann haben wir
den Körper K2 zur Umgebung des herausgegriffenen Objektes K1 gemacht. Als Teil
der Umgebung wirkt der Körper K2 auf das herausgegriffene Objekt K1 ein. Diese
Einwirkung des Körpers K2 auf das von uns herausgegriffene Objekt modellieren wir
r
mit einem Kraftvektor F2 →1 .
Wir können aber auch umgekehrt den Körper K2 als unser reales Objekt betrachten.
Dann ist alles andere die gesamte Umgebung dieses herausgegriffenen Objektes,
31
also auch der Körper K1. Als Teil der Umgebung wirkt er auf K2 ein. Diese Einwirr
r
r
kung modellieren wir mit einem Kraftvektor F2 ←1 . Für die Kraftvektoren F2 →1 und F2 ←1
gilt, dass sie betragsmäßig gleich groß und entgegen gesetzt gerichtet sind:
r
r
F2 ←1 = − F2 →1 .
2.5.4.
Wie das „1. Newtonsche Axiom“ nicht lautet
Sehr viele Bücher bieten folgende Formulierung des „1. Newtonschen Axioms“ an:
„Ein kräftefreier Körper bewegt sich mit gleichbleibender Geschwindigkeit längs einer
Geraden“. So wie dieser Satz da steht, ist er der einfachste Spezialfall des „2. Axioms“ und daher als eigenes Axiom völlig überflüssig; außerdem findet sich in diesem
Satz nicht der kleinste Hinweis darauf, in was für einer Art von Bezugssystem sich
der kräftefreie Körper mit gleichbleibender Geschwindigkeit längs einer Geraden bewegt. Wir haben dagegen schon mehrfach betont, dass das Konzept „Bahnkurve eines Körpers“ erst dann zu existieren beginnt, wenn wir ein Bezugssystem gewählt
haben. Wir brauchen uns dazu nur vor Augen zu halten, dass in einem mit dem Körper mitbewegten Bezugssystem die Bahnkurve in einen Punkt „entartet“, weil es im
mitbewegten Bezugssystem per definitionem keine Ortsveränderung des Körpers
gibt!
Für die Übersetzung der Worte „bewegt sich mit gleichbleibender Geschwindigkeit
längs einer Geraden“ in mathematische Sprache, kommt wohl nur ein Ausdruck der
Form
r
x ( t ) = ( x0 + v x 0 t , y 0 + v y 0 t , z 0 + v z 0 t ) ,
(2.5.4.1)
in Frage. Dieser stellt aber nur dann das Beabsichtigte dar, wenn wir gleichzeitig wisr
sen, dass sich die darin enthaltenen Größen „Anfangsort der Bahn x0 = ( x0 , y 0 , z 0 ) “,
r
und „gleichbleibende Geschwindigkeit v0 = ( v x 0 , v y 0 , v z 0 ) längs der Bahn“ auf ein mit
kartesischen Koordinaten überzogenes Inertialsystem beziehen. Bezieht sich der
Ausdruck (2.5.4.1) jedoch auf ein beliebiges Nichtinertialsystem, dann kann er trotz
32
dann kann er trotz seines einfachen Aussehens von einer beliebig komplizierten
Ortsveränderung des betrachteten Körpers in der realen Welt herkommen. Machen
wir uns dazu wieder bewusst, dass eine solche beliebig komplizierte Ortsveränderung in der realen Welt in einem mit dem Körper mitbewegten Bezugssystem sogar
noch einfacher als (2.5.4.1) aussieht, nämlich
r
x( t ) = ( x0 , y 0 , z 0 ) .
Wir kommen also nicht darum herum, im „1. Newtonschen Axiom“ die besonderen
Eigenschaften der inertialen Bezugssysteme für die Newtonsche Mechanik zu postulieren. Haben wir das getan, dann ist die Formulierung: „Ein kräftefreier Körper bewegt sich mit gleichbleibender Geschwindigkeit längs einer Geraden“ tatsächlich der
einfachste Spezialfall des „2. Newtonschen Axioms“ und als solcher natürlich in ihm
enthalten! Deshalb ist es überflüssig, ihn eigens zu erwähnen.
2.5.5.
Das „2. Newtonsche Axiom“ ist keine Definition der Kraft
Zahlreiche Missverständnisse ranken sich um das „2. Newtonsche Axiom“. Die häufigste Fehlmeinung deutet dieses Axiom als eine „Definition“ der „Kraft“. Das würde
aber doch bedeuten, dass es eine Kraft überhaupt nur dann gibt, wenn sich Körper
beschleunigt bewegen.
Demgegenüber haben wir bei der Formulierung des „2. Newtonschen Axioms“ betont, dass Masse, Beschleunigung und Kraft völlig unabhängige Modellbausteine
sind. Die Masse wird einem herausgegriffenen Körper zugewiesen, unabhängig davon, ob dieser Körper gerade eine Bahnkurve durchläuft oder nicht, und unabhängig
davon, ob die Umgebung auf ihn einwirkt oder nicht. Die Beschleunigung wird unabhängig von der Größe der Masse und unabhängig von der Kenntnis äußerer Einwirkung allein aus der Bahnkurve gewonnen. Die Kräfte werden völlig unabhängig davon modelliert, ob überhaupt Körper da sind, auf die sie einwirken. Und wenn Körper
da sind, unabhängig davon, ob diese Körper unter diesen Einwirkungen beschleunigte Bewegungen ausführen, oder ob solche Bewegungen durch gleich große Gegen-
33
kräfte verhindert werden. In der „Golden Gate“ Hängebrücke in San Francisco, Kalifornien, gibt es z. B. gewaltige Gewichtskräfte und eben so gewaltige Gegenkräfte
der Stahlseile, so dass es zu keinen größeren Beschleunigungen kommt, was für die
Brücke fatal wäre! Wenn Kräfte erst durch das Vorliegen von Beschleunigungen definiert würden, dann wäre die Golden Gate Brücke kräftefrei – was uns wohl ziemlich
unsinnig anmutet.
Was das „2. Newtonsche Axiom“ wirklich besagt ist also nicht mehr und nicht weniger, als dass, wenn ein als Massenpunkt der Masse m modellierter Körper als Folge
von Einwirkungen aus der Umgebung, die als ein resultierender Kraftvektor modelliert werden, relativ zu einem inertialen Bezugssystem eine beschleunigte Bewegung
ausführt, das Produkt aus Masse und Beschleunigung immer die gleiche Richtung
und immer den numerisch gleichen Betrag hat wie der resultierende Kraftvektor.
Ironischerweise hat Newton als Schöpfer der „Newtonschen Mechanik“ dieser Irrmeinung selbst Vorschub geleistet, denn seine Worte „By the method of Analysis......we
may proceed from......Motions to the Forces producing them; and in general from Effects to their Causes...... And the Synthesis consists in assuming the Causes discovered, and established as Principles, and by them explaining the Phenomena proceeding from them, and proving the Explanations“ [Wilczek, 2003] wurden und werden von einigen „Mechanikern“ stark verkürzt als „Zuerst muss man aus den Beschleunigungen die Kräfte erkennen, und wenn man diese hat, daraus weitere
Schlüsse ziehen“ interpretiert. Genährt wird diese Fehlinterpretation insbesondere
durch Newtons eigener spektakulärer Herleitung der funktionalen Gestalt der
Schwerkraft, die genau nach diesem Schema abgelaufen zu sein schien.
Erinnern wir uns, dass damals der Begriff „Kraft“ in der Physik noch gar nicht oder
höchstens sehr vage existierte: Galilei stellte zwar fest, dass alle Körper (ohne Luftwiderstand) mit der gleichen Beschleunigung fallen, aber er sprach noch nicht von
einer „Schwerkraft“, die dieses Fallen bewirken sollte. Und die drei Keplerschen Gesetze für die Planetenbewegung enthielten auch noch kein Konzept einer „Kraft“, die
die Planeten auf ihrer Bahn halten sollte. Dann kam jedoch Newton mit seiner Überzeugung von der Gültigkeit des „2. Axioms“. Und danach musste, weil die Planetenbewegung um die Sonne – relativ zum als inertial angenommenen Fixsternhimmel -
34
ja eine beschleunigte Bewegung war, das Produkt aus der Planetenmasse und dieser Beschleunigung zu jedem Zeitpunkt gleich einer „Schwerkraft“ sein, die die Sonr r
ne auf die Planeten ausübte, ma = FSchwerkraft .
Newton berechnete nun die Beschleunigung, die zu der von Kepler angegebenen
Bahn gehörte, setzte sie auf der linken Seite ein und konnte – nachdem er auch noch
sein 3. Axiom benutzte, die noch heute gültige funktionale Gestalt der von seinem „2.
r
Axiom“ postulierten Schwerkraft FSchwerkraft angeben!
Wir verschieben den ebenso einfachen wie lehrreichen Nachvollzug dieser Ableitung
(für den einfachsten Fall einer planetaren Kreisbahn) auf den Abschnitt 2.6.1. Doch
auch ohne diese Herleitung ist schon an dieser Stelle einsichtig, dass die Aufeinaderfolge der Newtonschen Schritte tatsächlich so war, wie von ihm beschrieben. Aus
dem 2. Axiom wurde die Gestalt der Schwerkraft erschlossen, und nachdem diese
bekannt war, wurde damit eine Reihe weiterer Phänomene erklärt, die auf der
Schwerkraft beruhen.
Doch dies war nur der besonderen historischen Situation zur Zeit Newtons zuzuschreiben. Heutzutage sind wir mit allen in der Mechanik vorkommenden Kräften so
vertraut, dass wir unsere Modellierungen für diese Kräfte nicht mehr über das Einfüttern zusätzlicher Information in das „2. Newtonsche Axiom“ gewinnen müssen.
2.5.6.
Fehler bei der Anwendung des „3. Newtonschen Axioms“
Der typische Fehler bei der Anwendung des „3. Newtonschen Axioms“ lässt sich am
einfachsten am biomechanischen Beispiel des Tauziehens erläutern, wobei wir uns
weitgehend an Karin Lenz [Lenz, 2002] halten. Beim Tauziehen ziehen bekanntlich
zwei Teams von Sportstudenten an den Enden eines Seils und versuchen, die jeweils gegnerische Mannschaft über eine bestimmte Marke zu ziehen, die sich anfänglich unter der Seilmitte befindet.
35
Wir wissen bereits, dass wir zur Anwendung der Newtonschen Mechanik die reale
Situation geeignet modellieren müssen. Dabei genügt es uns, die beiden Teams als
Massenpunkte zu modellieren, Team A mit der Masse M A , und Team B mit der
Masse M B . Zuerst wählen wir das Team A als den uns interessierenden Körper.
Dann gehört Team B zur Umgebung des „Körpers A", die auf den „Körper A" mit der
r
(vom Seil übertragenen) Kraft FA→ B einwirkt. Der Index „ A → B “ soll andeuten, dass
das Team A durch das Seil in die Richtung zum Team B gezogen wird. Andererseits
können wir aber auch Team B zum „Körper“ unseres Interesses machen. Dann wird
Team A zur Umgebung des „Körpers B". Diese wirkt auf den „Körper B" mit der (vom
r
Seil übertragenen Kraft) FB→ A . Nach dem „3. Newtonschen Axiom“ ist aber zu allen
Zeitpunkten
r
r
FA→ B = - FB→ A .
Manche Leute meinen angesichts dieser Konsequenz des „3. Newtonschen Axioms“,
die Newtonsche Mechanik würde voraussagen, keines der beiden Teams könnte das
Tauziehen je gewinnen, da es immer vom gegnerischen Team mit genau der gleichen Kraft gezogen würde, mit der es selbst zieht!
Doch mit den Augen der Newtonschen Mechanik betrachtet, sieht die Sache gleich
ganz anders aus: Denn wenn zum Beispiel unser herausgegriffener Körper das
Team A ist, dann gehört zu dessen Umgebung - die auf Team A mit Kräften einwirkt nicht nur das Seil, an dem Team B zieht, sondern auch die Schwerkraft der Erde und
die Stützkraft des Bodens, gegen den sich Team A stemmt. In vertikaler Richtung
wirkt also die Schwerkraft und die Bodenauflagekraft auf den „Massenpunkt Team A"
und in horizontaler Richtung die Zugkraft von Team B und die Reibungskraft des Bodens. Während sich die beiden Kräfte in vertikaler Richtung zu Null kompensieren,
hängt die Beschleunigung des „Massenpunktes Team A" in horizontaler Richtung
von der, aus der Reibungskraft des Bodens und der Zugkraft des gegnerischen
Teams B zusammengesetzten horizontalen Komponente der Gesamtkraft
rA
r
rA
Fgesamt
= FA→ B + FBodenreibu
ng ab. Ganz Analoges gilt, wenn wir das Team B als „unseren“
Körper
heraus
greifen.
Dann
wirkt
auf
diesen
die
Gesamtkraft
36
rB
r
rB
Fgesamt
= − FA→ B + FBodenreibu
ng . Da die Zugkraft des jeweils gegnerischen Teams gleich
ist, wird somit (bei aus Fairness etwa gleichen Massen, M A ≅ M B ) jenes Team auf
die gegnerische Mannschaft die größere Gesamtkraft ausüben, dem es gelingt, am
Boden festeren Halt zu finden und so eine höhere Reibungskraft des Bodens auf sich
einwirken zu lassen als das gegnerische Team. Im Allgemeinen wird daher trotz der
Gültigkeit des „3. Newtonschen Axioms“ eines der beiden Teams die Oberhand behalten.
2.6. Anwendungen der „Newtonschen Axiome“
2.6.1.
Kräfte aus Bahnkurven
Wir führten bereits im Abschnitt 2.5.5. aus, dass es zu Newtons Zeiten ganz und gar
nicht selbstverständlich war, sich über alle Einwirkungen der Umgebung auf einen
herausgegriffenen Körper Rechenschaft zu geben, und diese gar mit Kraftvektoren
zu modellieren. Man war sich zwar allgemein bewusst, dass das Ziehen oder Heben
von Lasten durch Mensch und Tier Kräfteaufwand erforderte, aber schon bei Bodenreibung und Luftwiderstand war dies im Sinne der aristotelischen „naturphilosophischen“ Tradition keineswegs so. Andererseits waren Beschleunigungen von Körpern
leicht zu beobachten. Und aus dem „2. Newtonschen Axioms“ wusste man nunmehr,
dass solche Beschleunigungen immer mit Kräften einhergingen. Des Weiteren wusste man, dass diese Kräfte ihrerseits passende Modellierungen jener Einwirkungen
waren, die in der Realität die beobachteten Beschleunigungen der realen Körper bewirkten. Daher ergab sich nun die Möglichkeit, aus den Bahnkurven, die herausgegriffene Körper bei gegebenen Einwirkungen durchliefen, über die zugehörigen Beschleunigungen die „passenden“ Modellierungen für diese gegebenen Einwirkungen
zu finden.
Diese Idee wollen wir an einem ebenso einfachen wie eindrucksvollen Beispiel illustrieren. Dazu nehmen wir an, dass ein von uns als Massenpunkt mit der Masse m
modellierter Körper durch eine bestimmte – uns im Augenblick noch nicht näher bekannte - Einwirkung auf einer ebenen, mit gleichbleibender Geschwindigkeit v0 durch-
37
laufenen Kreisbahn mit dem Radius R gehalten wird. Dabei bezieht sich unsere Feststellung „auf einer ebenen Kreisbahn“ auf das von uns zu Hilfe genommene Bezugssystem, als welches wir einen Sportplatz annehmen. Auf dieses zeichnen wir rechtwinklige Koordinaten x, y ein, und zwar so, dass deren Ursprung 0 mit dem Mittelpunkt der durchlaufenen Kreisbahn zusammenfällt. In diesem Koordinatensystem
r
r
wird die Bahn des Massenpunktes m mit x( t ) , x( t ) = R , beschrieben. Der Ort des
r
Massenpunktes m ist also zu jedem Zeitpunkt das Ende des Ortsvektors x( t ) , der
r
seinerseits zu allen Zeitpunkten die feste Länge R besitzt, x( t ) = R (was ja die Eigenschaft einer Kreisbahn ist).
Von der Einwirkung, die den Massenpunkt auf dieser Kreisbahn hält, wissen wir vorerst nur, dass sie eben den Massenpunkt um den Ursprung 0 unseres
Koordinatensystems kreisen lässt. Natürlich modellieren wir auch die Einwirkung
durch einen Kraftvektor
r
r
F = − f ( R )x ,
(2.6.1.1)
in dessen vorläufige Gestalt wir unsere bisherige Information über diese Einwirkung
aufgenommen haben: Sie zeigt immer vom Massenpunkt (der sich ja an der Stelle
r
r
x( t ) befindet) zum Ursprung, hat also die Richtung − x( t ) , und hat zu verschieder
r
nen Abständen R verschiedene Stärken: F = Rf ( R ) , da ja x( t ) = R gilt. Dass sie
immer zum Ursprung zeigt, also immer senkrecht zur Kreisbahn gerichtet sein muss,
wissen wir aus der Information über die gleichbleibende Geschwindigkeit des Massenpunktes m längs der Kreisbahn. Hätte die Kraft eine Komponente in Richtung der
Bahn, gäbe es nach dem „2. Newtonschen Axiom“ auch eine Beschleunigung in dieser Richtung, und die Geschwindigkeit wäre nicht konstant. Da sie es nach unserer
(angenommenen) Information über die Bahn aber ist, muss der die Einwirkung modellierende Kraftvektor immer senkrecht zur durchlaufenen Kreisbahn sein.
Als Nächstes gilt es, die zu dieser mit konstanter Geschwindigkeit v0 durchlaufenen
Kreisbahn gehörige Beschleunigung zu bestimmen. Wir gehen dazu so wie in Abschnitt 2.4.4. vor, um die dort allgemein erklärte geometrische Konstruktion der Beschleunigung am jetzt vorliegenden einfachen Beispiel zu üben.
38
Abbildung 2.6.1: Positionen des Massenpunktes auf der Kreisbahn
r
r
r
dx
In einem ersten Schritt konstruieren wir die Geschwindigkeit v ( t ) =
=: x& . Dazu
dt
r
betrachten wir nach Abb. 2.6.1 zwei knapp aufeinander folgende Ortsvektoren x( t )
r
r
r
r
r
und x( t + ∆t ) , und bilden deren Differenz: ∆x( t ) = x( t + ∆t ) − x( t ) . ∆x( t ) ist also ein
r
r
Vektor längs der „Kreissehne“ von x( t ) nach x( t + ∆t ) , und nähert sich immer mehr
r
der Tangente im Punkt x( t ) , je kleiner wir ∆t wählen. Aber wie klein wählen wir ∆t ?
Da die Größe von ∆t physikalisch unwesentlich ist, möchten wir davon loskommen
und gehen deshalb zum „Limes ∆t → 0 “ über:
r
r
r
r
dx
x (t + ∆t ) − x (t )
v (t ) =
= lim
.
dt ∆t →0
∆t
r
Da wir uns bereits überlegten, dass v (t ) längs der Tangente an den Kreis im Punkt
r
x (t ) liegen muss, ist die Richtung der Geschwindigkeit bekannt. Wir müssen nur
r
noch ihren Betrag v (t ) bestimmen:
r
r
r
r
x (t + ∆t ) − x (t )
∆x (t )
.
v (t ) = lim
= lim
∆t →0
∆t →0 ∆t
∆t
39
Abbildung 2.6.2: Geschwindigkeitsvektor beim Durchlaufen einer Kreisbahn´
Der letzte Term in dieser Beziehung zeigt uns, dass wir die Länge des Vektors
r
∆x( t ) durch ∆t dividieren müssen. Dazu lehrt uns ein Blick auf die Abb. 2.6.1, dass
wir dies mit dem aus der Schule bekannten „Kosinussatz“ erreichen können. Dazu
r
r
müssen wir aber den Winkel zwischen x( t ) und x( t + ∆t ) kennen. Der ist jedoch einfach zu bestimmen: Wenn wir den von unserem Massenpunkt in einer Sekunde zurückgelegten Winkel mit dem Buchstaben ω bezeichnen; und sinnvoller Weise „Winkelgeschwindigkeit“ nennen, dann legt der Massenpunkt in ∆t Sekunden den Winkel
r
r
ω∆t zurück. Also ist der gesuchte Winkel zwischen x( t ) und x( t + ∆t ) gleich ω∆t ,
und wir finden durch Anwendung des Kosinussatzes und geeignete Umformungen
der Reihe nach
r
R 2 + R 2 − 2 R 2 cos( ω∆t )
2 R 2 [1 − cos( ω∆t )]
r
∆x( t )
= ω lim
= ω lim
v ( t ) = lim
∆t →0
∆t →0
∆t →0
∆t
ω∆t
ω∆t
ω∆t
ω∆t
4 R 2 sin 2
sin
2
2 = ωR = ω xr( t ) ,
= ω lim
= ωR lim
∆t →0
∆t →0
ω∆t
ω∆t
2
wobei wir im vorletzten Gleichheitszeichen den ebenfalls aus der Schule bekannten
Grenzwert lim
ε →0
sin ε
ε
= 1 verwendet haben.
40
Abbildung 2.6.3: Geometrische Bestimmung des Beschleunigungsvektors beim Durchlaufen einer
Kreisbahn.
Nun wenden wir uns der Berechnung der Beschleunigung zu. Wieder gehen wir so
wie bei der Einführung der Beschleunigung im Abschnitt 2.4.4. geometrisch vor. Dazu betrachten wir nach Abb. 2.6.3 zwei knapp aufeinander folgende Geschwindigr
r
keitsvektoren v ( t ) und v ( t + ∆t ) . Zum Unterschied von den beiden Ortsvektoren bei
der Bildung der Geschwindigkeit, „entspringen“ diese beiden Geschwindigkeitsvektor
ren nicht am selben Punkt, sondern an den verschiedenen Punkten x( t ) und
r
x( t + ∆t ) . Um die Differenz von zwei Vektoren bilden zu können, müssen sie aber
r
am selben Ort „entspringen“. Daher verschieben wir v ( t + ∆t ) parallel vom Punkt
r
r
x( t + ∆t ) zum Punkt x( t ) und bilden dann den Differenzvektor. Dieser zeigt von der
r
r
Spitze von v ( t ) zur Spitze von v ( t + ∆t ) , und wird im Limes ∆t → 0 antiparallel zu
r
r
x( t ) . Damit steht auch die Richtung der Beschleunigung a( t ) fest, und wir müssen
r
uns nur noch um deren Betrag a( t ) kümmern. Zu seiner Berechnung
r
r
∆v ( t )
a( t ) == lim
∆t →0
∆t
benötigen wir – analog zur Berechnung des Betrages der Geschwindigkeit - wieder
r
r
die Länge des Vektors v ( t ) , also ∆v ( t ) . Gemäß Abb. 2.6.3 kann dies wieder mit
r
r
Hilfe des „Kosinussatzes“ erfolgen. Der Winkel zwischen v ( t ) und v ( t + ∆t ) ist wieder
ω∆t , und wir finden nach den analogen Umformungen wie bei der Berechnung der
Geschwindigkeit der Reihe nach
41
r
ω 2 R 2 + ω 2 R 2 − 2ω 2 R 2 cos( ω∆t )
2ω 2 R 2 [1 − cos( ω∆t )]
r
∆v ( t )
= ω lim
= ω lim
a( t ) = lim
∆t →0
∆t →0
∆t →0
∆t
ω∆t
ω∆t
ω∆t
ω∆t
4ω 2 R 2 sin 2
sin
2
2 = ω 2 R = ω 2 xr( t ) .
= ω lim
= ω 2 R lim
∆t →0
∆t →0
ω∆t
ω∆t
2
Nach Betrag und Richtung erhalten wir also für die Beschleunigung längs einer
Kreisbahn vom Radius R, die mit der konstanten Geschwindigkeit v0 = ωR durchlaufen wird
r
r
a( t ) = −ω 2 x( t )
(2.6.1.2)
Zu der von uns in (2.6.1.2) berechneten Beschleunigung ist zunächst eine wichtige
Erinnerung am Platze: Wir vereinbarten vor Beginn dieser Rechnung, die Bahnkurve
unseres als Massenpunkt mit der Masse m modellierten Körpers relativ zu einem
Sportplatz als Bezugssystem aufzuzeichnen – und die Aufzeichnung relativ zu diesem Bezugssystem ergab erst die mit konstanter Geschwindigkeit v0 durchlaufene
Kreisbahn. Da es sich bei diesem Bezugssystem um ein Inertialsystem handelt, ist
die aus dieser Kreisbahn mit den Newtonschen Verfahren gewonnene Beschleunigung (2.6.1.2) eine „Newtonsche Beschleunigung“, für die das „2. Newtonsche Axiom“ gilt.
Im vorliegenden Fall gilt daher
r
r
− mω 2 x( t ) = − f ( R )x( t ) ,
(2.6.1.3)
wobei wir natürlich für die Modellierung der Einwirkung den Kraftvektor aus (2.6.1.1)
übernahmen. Aus dieser Beziehung lesen wir also ab,
f ( R ) = mω 2
(2.6.1.4)
42
Nun fragt sich noch, wie die Funktion f ( R ) vom Radius der vom Massenpunkt
durchlaufenen Kreisbahn abhängt. Da wir bis jetzt wissen, dass f ( R ) = mω 2 ist, lässt
sich die Antwort auf diese Frage aus der Abhängigkeit des Produktes mω 2 vom Radius R erhalten. Da m die Masse des die Kreisbahn durchlaufenden Körpers bedeutet, und die Masse nur vom Körper, nicht aber von der durchlaufenen Bahn abhängt,
ist m für alle Radien R gleich, und somit unabhängig von R. Also bleibt noch ω 2 ( R )
zu eruieren, also wie das Quadrat der Winkelgeschwindigkeit einer unter Einwirkung
der Kraft (2.6.1.1) durchlaufenen Kreisbahn vom Radius R dieser Kreisbahn abhängt.
Dazu müssen wir uns die einzelnen Einwirkungen konkret ansehen.
Als ersten Fall nehmen wir an, unser Körper sei mit einer auf die Länge R gedehnten
Spiralfeder an den Ursprung 0 gebunden, und genau so in Bewegung gesetzt, dass
der Körper eine Kreisbahn vom Radius R durchläuft. Dabei bleibt also während der
Bewegung die Länge der Spiralfeder immer gleich R (wobei wir offensichtlich annehmen, dass die sehr wohl immer vorhandenen Reibungseinflüsse hier so klein sind,
dass sie zunächst einmal weg gelassen werden können). Wenn wir auf diese Weise
Kreisbahnen mit lauter verschiedenen Radien R1, R2, R3........produzieren, dann stellen wir fest, dass auf die mit solchen Winkelgeschwindigkeiten durchlaufen einzelnen
Kreisbahnen die Beziehung
ω 2( R ) =
k
m
(2.6.1.5)
gilt. Damit finden wir als geeignete Modellierung für die Wirkung einer Spiralfeder auf
eine Masse den Kraftvektor
r
r
FSpiralfeder = −kx ,
(2.6.1.6)
mit der „Federkonstanten“ k.
Als zweiten wichtigen Fall wechseln wir vom Sportplatz als unserem inertialen Bezugssystem zum Fixsternhimmel über, und betrachten einen Planeten der Masse m,
der auf einer Kreisbahn mit dem Radius R und mit der für einen bestimmten Radius
43
konstanten Winkelgeschwindigkeit ω ( R ) um die Sonne kreist. Die Kreisbahn ist ein
Spezialfall des „1. Keplerschen Gesetzes“: „Die Planeten umkreisen die Sonne auf
Ellipsenbahnen, in deren einem Brennpunkt die Sonne steht“. Die konstante Winkelgeschwindigkeit ist ein Spezialfall des „2.Keplerschen Gesetzes“: „Der Radiusvektor
von der Sonne zum Planeten überstreicht in gleichen Zeiten gleiche Flächen“. Da bei
einer Kreisbahn der Radiusvektor immer die Länge R hat, überstreicht er bei konstanter Winkelgeschwindigkeit offensichtlich gleiche Flächen in gleichen Zeiten.
Schließlich macht das „3. Keplersche Gesetz“ (als Formel geschrieben) die Aussage,
dass das Produkt ω 2 ( R )R 3 für alle Planeten, unabhängig von ihrer Masse, immer die
gleiche Zahl ist:
ω 2( R ) =
Kons tan te
.
R3
(2.6.1.7)
Damit finden wir als geeignete Modellierung für die Wirkung der Schwerkraft einer
Masse M Sonne auf eine Planetenmasse mPlanet den Kraftvektor
r
m
Kons tan te r
FSchwerkraft ( R ) = − Planet 3
x.
R
(2.6.1.8)
Die Konstante in (2.6.1.8) lässt sich noch weiter untersuchen. Da unsere zugehörige
Überlegung mit Sonne und Erde zu unrealistisch klingen würde, denken wir uns zwei
andere Himmelskörper mit den Massen m1 und m2, die aufeinander gravitativ einwirken. Halten wir von diesen beiden Himmelskörpern zuerst den Körper m2 fest und
lassen ihn von m1 im Abstand R umkreisen, dann würden wir – genau wie oben - als
Schwerkraft von m2 auf m1 den Vektor
r 2→1
m2 K 2→1 r
FSchwerkraf
(
R
)
=
−
x2→1
t
R3
(2.6.1.9)
finden (Die Indizes „2→1“ sollen nur daran erinnern, dass es sich dabei um Größen
handelt, die auftreten, wenn das festgehaltene m2 auf m1 einwirkt). Halten wir dagegen den Himmelskörper m1 fest und lassen ihn im Abstand R von m2 umkreisen, dann
würden wir – wieder mit den gleichen Schlüssen – auf den Kraftvektor
44
r 1→2
m1 K 1→2 r
FSchwerkraf
(
R
)
=
−
x1→2
t
R3
(2.6.1.10)
geführt werden.
r 1→2
r 2→1
Nun ist aber wegen des „3. Newtonschen Axioms“ FSchwerkraf
t ( R ) = − FSchwerkraft ( R ) , und
r
r
x1→2 = − x2→1 . Setzen wir dies in (2.6.1.10) ein und vergleichen das Resultat mit
(2.6.1.9), so finden wir, dass für alle Massenpaare {m1 , m2 }
m1 K 1→2 = m2 K 2→1
gelten muss. Dies ist der Fall, wenn gilt
K 1→2 = m2 G und K 2→1 = m1G ,
mit einer gemeinsamen Konstanten G, die „Gravitationskonstante“ heißt. Damit haben wir endgültig für die Modellierung der gravitativen Einwirkung einer Masse m2 auf
eine sie im Abstand R umkreisende Masse m1 den Kraftvektor
r
mmGr
FSchwerkraft ( R ) = − 1 32 x ,
R
(2.6.1.11)
und für seinen Betrag
r
mmG
FSchwerkraft ( R ) = 1 22
R
(2.6.1.12)
gefunden.
45
2.6.2.
Bahnkurven aus Kräften
Im vorangegangenen Abschnitt wurden aus Kreisbahnen, die von einem als Massenpunkt modellierten realen Körper unter vorgegebenen Einwirkungen durchlaufen
werden, geeignete Modellierungen für die Kraftvektoren erhalten, die diese Einwirkungen im Rahmen der Newtonschen Mechanik beschreiben sollen. Dazu waren
hinreichende Details über die Winkelgeschwindigkeit erforderlich, die sich bei einer
Kreisbahn mit Radius R einstellt. Diese Aufgabe lösten wir für zwei wichtige Einwirkungen, die von einer Spiralfeder ausgeübte Kraft und die Gravitation. Im ersten Fall
erhielten wir als Kraftvektor das so genannte „Hooksche Gesetz“ (2.6.1.6), im zweiten Fall das „Newtonsche Gravitationsgesetz“ (2.6.1.11).
Klarerweise können „die Details über die Bahneigenschaften“, die sich bei uns auf
die Kenntnis der Funktion mω 2 ( R ) in Abhängigkeit vom Abstand reduzieren ließ,
nicht definiert werden, sondern müssen aus experimentellen Beobachtungen gewonnen werden. Aus diesem Grunde ist jetzt noch einsichtiger als im Abschnitt 2.1.9,
dass die über das „2. Newtonsche Axiom“ in (2.6.1.6) und (2.6.1.11) gewonnenen
Kraftvektoren keine Definitionen sind, wie dies manche Leute auch heute noch behaupten.
Damit ist der erste Teil des Newtonschen Programms: „By the method of Analysis......we may proceed from......Motions to the Forces producing them” einigermaßen
illustriert, so dass wir uns nun dem zweiten Teil diese Programms: „And the Synthesis consists in assuming the Causes discovered, and established as Principles, and
by them explaining the Phenomena proceeding from them…”. Mit anderen Worten,
wir nehmen nun an, wir haben für alle vorkommenden Einwirkungen auf Körper, die
wir als Massenpunkte modellieren können, geeignete Modellierungen in Form von
r r r
Kraftvektoren F ( x , x& ) zur Verfügung, und wir sind von der Richtigkeit des „2. Newtonschen Axioms“
r r r r
m&x& = F ( x , x& )
(2.6.2.1)
überzeugt. Was fangen wir damit an?
46
Damit haben wir die Möglichkeit, die Bahnkurven dieser Körper theoretisch vorherzusagen, ohne vorher an diesen Körpern Experimente durchführen zu müssen, wenn
r
r
wir den Startort x0 und die Startgeschwindigkeit v0 kennen. Um die Bedeutung dieser Möglichkeit einzusehen, müssen wir gar nicht lange nach Beispielen suchen: Die
Bahnkurve der Marssonde, die während der Niederschrift dieser Arbeit unterwegs ist,
wurde mit Hilfe der Newtonschen Mechanik voraus berechnet. Es wäre aus Kostenund Zeitgründen auch gar nicht möglich, eine Bahn in einer Art „trial and error“ Methode mühsam zu finden. Ebenso wichtig ist es, die Bahn eines „Bungee Jumpers“
voraus berechnen zu können: Wir kennen ja die „Federkraft“ des verwendeten elastischen Seils, wir kennen die Schwerkraft, wir kennen die Masse des „Jumpers“, und
wir kennen den Absprungsort und die Absprunggeschwindigkeit. Oder nehmen wir
den Bau einer großen Sprungschanze: Auch hier müssen die Ingenieure die Bahnkurve der Springer für eine gewählte Absprunggeschwindigkeit, eine gewählte
Schanzenneigung, und eine gewählte Form des Aufsprunges vorausberechnen können. Dies ist mit Hilfe der Newtonschen Mechanik möglich, weil wir für die Schwerkraft und für die Luftkräfte (Auftrieb und Widerstand) gute Modellierungen zur Verfügung haben. Deshalb kommen wir ohne praktische Vorversuche aus, die die Gesundheit der verwendeten „Versuchskaninchen“ nur unnötig gefährden würden.
Wir können leicht einsehen, dass wir aus den drei Bestimmungsstücken
r
r r r r r
m&x& = F ( x , x& ) , x0 und v0 die Bahnkurve eines Massenpunktes berechnen können. Als
ersten Schritt dazu nehmen wir an, wir hätten die Bahnkurve beobachtet, und uns für
beliebig
knapp
hinter
Zeitpunkte t0 , t0 + ∆t , t0 + 2∆t ,
r
r
r
Beschleunigungen a( t0 ) , a( t0 + ∆t ) , a( t0 + 2∆t ) ,
einander
liegende
t0 + 3∆t ,.....die zugehörigen
r
a( t0 + 3∆t ) ,.......nach dem im Abschnitt 2.1.4. dargelegten Verfahren verschafft. Dann
können wir daraus wieder die Bahnpunkte mit Schrittweisen, sehr durchsichtigen
Verfahren auf folgende Weise gewinnen:
r
r r
v ( t0 + ∆t ) = v0 + a( t0 )∆t ,
(2.6.2.2a)
r r
denn v0 = v ( t0 ) , und die Beschleunigung ist nach (2.4.1.1) – ohne den Übergang
r
r
r
r
v ( t0 + ∆t ) − v ( t0 )
zum Grenzwert - a( t0 ) =
. Und den Bahnpunkt x( t0 + ∆t ) finden wir
∆t
47
aus
r
r r
x( t0 + ∆t ) = x0 + v0 ∆t .
(2.6.2.2b)
Ganz analog berechnen wir die Geschwindigkeit und den Ort zum „nächsten Zeitpunkt t0 + 2∆t :
r
r
r
v ( t0 + 2∆t ) = v ( t0 + ∆t ) + a( t0 + ∆t )∆t ,
(2.6.2.3a)
r
r
r
x( t0 + 2 ∆t ) = x( t0 + ∆t ) + v ( t0 + ∆t )∆t .
(2.6.2.3b)
Auf diese Weise lassen sich nach einander alle Bahnpunkte rekonstruieren. Der
springende Punkt ist nun der, dass wir durch (2.6.2.1) ohne vorherige Kenntnis der
Bahn dennoch die Beschleunigung für jeden Bahnpunkt mitgeteilt bekommen, wenn
wir nur wissen, dass der Massenpunkt irgendwann diesen Bahnpunkt mit der Ger
r
schwindigkeit x& ( t ) = v ( t ) „betritt“. Deshalb können wir die obigen Schritte auch so
schreiben:
r r r
r
r
v ( t0 + ∆t ) = v0 + F ( x0 , v0 )∆t ,
r
r r
x( t0 + ∆t ) = x0 + v0 ∆t .
r r
r
r
r
v ( t0 + 2 ∆t ) = v ( t0 + ∆t ) + F ( x( t0 + ∆t ), v ( t0 + ∆t ))∆t ,
r
r
r
x( t0 + 2 ∆t ) = x( t0 + ∆t ) + v ( t0 + ∆t )∆t .
(2.6.2.4a)
(2.6.2.4b)
(2.6.2.5a)
(2.6.2.5b)
Während sich dieses Verfahren sehr effizient mit Hilfe eines Computerprogramms
numerisch durchführen lässt, wäre es für eine „per Hand Berechnung“ äußerst umständlich. Glücklicherweise hat die Mathematik mit ihrer „Theorie der Differentialgleichungen“ für Fälle, wo der Kraftvektor auf der rechten Seite von (2.6.2.1) eine einfache Gestalt hat, Methoden entwickelt, um die Bahnkurve direkt zu erhalten. (Das „2.
Newtonsche Axiom“ (2.6.2.1) wird deshalb als „Differentialgleichung“ bezeichnet, weil
r
darin nicht nur die gesuchte Größe x( t ) selbst, sondern auch deren erster und zweiter Differentialquotient auftreten).
48
Ein solcher Fall mit einfachem Kraftvektor ist (2.6.1.6), die Bewegung eines Massenpunktes unter dem Einfluss einer Spiralfeder. Dafür lautet das „2. Newtonsche Axiom“ zusammen mit den Anfangsbedingungen (zur Zeit t = 0 , wenn wir unsere
Stoppuhr, mit der wir die Zeit messen, zu Beginn der Bewegung einschalten)
r
r r
r r
r
m&x& = −kx , x( 0 ) =: x0 , v ( 0 ) =: v0 .
(2.6.2.6)
Da wir nicht die Absicht haben, in die Lösungstheorie für Differentialgleichungen einzusteigen, geben wir die Lösung (2.6.2.6) einfach an, und zeigen anschließend, dass
sie tatsächlich alle geforderten Eigenschaften besitzt:
r
r
r
v0
x( t ) = x0 cos ωt + sin ωt , ω 2 = k m .
ω
(2.6.2.7)
r
r
Für die Zeit t = 0 reduziert sich (2.6.2.7) auf x( t ) = x0 , also auf den Anfangsort, und
die Ableitung von (2.6.2.7), also die Geschwindigkeit,
r
r
r
r
x& ( t ) = v ( t ) = −ωx0 sin ωt + v0 cos ωt
(2.6.2.8)
r
r
reduziert sich auf v ( 0 ) = v0 , also die Anfangsgeschwindigkeit. Bilden wir schließlich
durch nochmalige Ableitung von (2.6.2.8) die Beschleunigung, so finden wir
&xr&( t ) = −ω 2 xr cos ωt − ωvr sin ωt = −ω 2 xr( t ) = − k xr( t ) ,
0
0
m
also gerade das auf diese Bewegung spezialisierte „2. Newtonsche Axiom“ (2.6.2.6).
Die Bahnkurve (2.6.2.7) erfüllt also alle Bedingungen und ist somit – wie behauptet –
die Lösung des vorliegenden Problems.
Wie sieht die Bahnkurve (2.6.2.7) in einer Grafik aus? Dies hängt vom Anfangsort
r
und Anfangsgeschwindigkeit ab. Beginnen wir mit dem einfachsten Fall, bei dem x0
r
r
längs der x-Achse liegt und den Betrag x0 = R besitzt, und v0 liegt längs der y-Achse
49
r
r
und besitzt den Betrag v0 = ω x0 = ωR . Dann sieht die Bahnkurve in Komponenten so
aus:
cos ωt
x( t )
y( t ) = R sin ωt .
0
z( t )
(2.6.2.9)
r
Daraus ist unmittelbar zu entnehmen, dass der Betag von x( t ) sich nicht ändert,
sondern immer gleich R ist,
r
x( t ) = x 2 ( t ) + y 2 ( t ) + z 2 ( t ) = R 2 cos 2 ( ωt ) + R 2 sin 2 ( ωt ) + 0 = R .
Diese speziellen Annahmen für den Anfangsort und die Anfangsgeschwindigkeit ergeben als Bahnkurve also jene Kreisbahnen mit dem Mittelpunkt im Ursprung 0 unseres Koordinatensystems, aus denen wir in Abschnitt 6.2.1. die Modellierung der
Spiralfederkraft gewonnen haben.
r
r
Wenn wir in einem etwas allgemeineren Fall x0 wieder längs der x-Achse und v0
wieder längs der y-Achse legen, aber die Beträge beider Vektoren beliebig annehmen, dann beschreibt die Bahn (2.6.2.7) eine Ellipse in Hauptlage (vgl. Abb. 2.6.4).
Abbildung 2.6.4: Massenpunkt wird durch Feder auf Ellipsenbahn gehalten
Denn nun lautet die Bahn in Komponentendarstellung
50
r
x( t ) x0 cos ωt
r
y( t ) = v0 sin ωt / ω ,
z( t )
0
(2.6.2.10)
woraus wir durch Elimination von t die Gleichung einer Ellipse erhalten, deren Mittelpunkt der Ursprung 0 ist, und deren Achsen parallel zu den Koordinatenachsen liegen:
x 2 (t ) ω 2 y 2 (t )
2
2
r 2 + r 2 = cos (ωt ) + sin (ωt ) = 1.
x0
v0
r
r
Nehmen wir nun noch allgemeiner zwar x0 wieder längs der x-Achse, v0 aber in einer beliebigen Richtung, so ist die zugehörigen Bahnkurve zwar wieder eine Ellipse
mit dem Mittelpunkt im Ursprung 0, deren Hauptachse schließt aber nun einen gewissen Winkel mit der x-Achse ein.
r
In (2.6.2.9) und (2.6.2.10) haben wir jeweils die z-Komponente des Ortsvektors x( t )
mit angezeigt, obwohl diese immer Null ist, die Bewegungen also in einer Ebene verlaufen. Diese Eigenschaften der durch (2.6.2.6) beschriebenen Bewegungen sind
bereits in der Bewegungsgleichung enthalten – denn alle Schlüsse, die wir in der
Newtonschen Mechanik ziehen, sind bereits im Modell enthalten. Das muss ja auch
so sein, denn durch das „Folgern“ kann doch keine neue Information hinzukommen –
nur die dem Modell bereits inne wohnende Information wird transparenter gemacht.
Dass bereits (2.6.2.6) ebene Bewegungen voraussagt, sehen wir auf folgende Weise: Wir beginnen mit der „kreuzweisen“ Multiplikation (also der „Vektormultiplikation“
r
zum Unterschied von der skalaren Multiplikation) der Bewegungsgleichung mit x( t ) :
r
r
r r
r
r r
x × m&x& = x × ( − kx ) = − k ( x × x ) = 0 ,
r
weil das „Kreuzprodukt“ .von x( t ) mit sich selbst ja Null ist. Die linke Seite der ent-
standenen Gleichung können wir aber als eine Ableitung nach der Zeit schreiben,
51
(
)
r r
d r
x × mx& = 0 ,
dt
weil einer der beiden bei der Differentation dieses Produktes entstehenden Terme
r
r
wieder Null ist, x& × mx& = 0 . Wenn jedoch die zeitliche Ableitung des Ausdrucks
r
r
r
r
x × mx& =: L immer Null ist, dann muss gelten, dass L sich im Zeitablauf nicht ändert.
r
Da die Größe L als der „Drehimpuls“ des Massenpunktes m bezüglich des Ursprunges 0 bezeichnet wird, können wir auch sagen, dass bei Bewegung unter einer Spiralfederkraft der Drehimpuls zeitlich konstant ist,
r
r r
x × mx& = L0 ,
(2.6.2.11)
r
was wir mit dem Index „Null“ am Symbol L0 andeuten.
Wie sieht man nun aus der zeitlichen Konstanz des Drehimpulses, dass die Bewer
gung insgesamt in einer Ebene verläuft? Da x& ∆t zwei „aufeinanderfolgende“ Ortsr
r
r
r
vektoren x( t ) und x( t + ∆t ) verbindet, spannen x& ( t ) und x( t ) die instantane Bewer
r
r
r
r
gungsebene auf. Und da x × mx& , also auch L0 , senkrecht auf x& ( t ) und x( t ) stehen,
r
ist L0 parallel zur instantanen Normalen auf die Bewegungsebene. Da sich weiterhin
diese Normale im Zeitablauf nicht ändert, ändert auch die instantane Bewegungsebne ihre Richtung nicht – die Bewegung ist eben.
Wenn wir die oben in (2.6.1.6) gefundenen Bahnkurven eines Körpers unter der Einwirkung einer Spiralfeder aber ohne Einwirkung der Schwerkraft beobachten wollen,
dann müssen wir den Körper sich auf einer möglichst glatten (um die Reibungskraft
klein zu halten) horizontalen Ebene (um die Schwerkraft durch die Stützkraft der Ebene zu kompensieren) bewegen lassen. Das „2. Newtonsche Gesetz“ lautet dann:
r
r
r
r r
r
r r
r
m&x& = − kx + FRe ibung + FSchwerkraft + FStützkraft , x( 0 ) = x0 , x( 0 ) = x0 . (2.6.2.12)
Dabei werden sich die Schwerkraft und die Stützkraft aufheben, die Reibungskraft
wird aber – anders als in unserer bisherigen idealisierten Betrachtungsweise – nicht
52
Null sein. Für die Reibung auf einer glatten Oberfläche ist eine Modellierung der
Form
r
r
FRe ibung = −rx&
(2.6.2.13)
recht brauchbar. Damit erhält unsere Bewegungsgleichung (2.6.2.12) das Aussehen
r
r r r
r r
r
m&x& = −kx − rx& , x( 0 ) = x0 , v ( 0 ) =: v0 .
(2.6.2.14)
Auch für diese Differentialgleichung liefert uns die Mathematik direkt die Lösung in
der Form
r
r
v0
− dt r
x( t ) = e x0 cos Ωt + sin Ωt , d := r 2m , Ω = ω 2 − d 2 , (2.6.2.15)
Ω
von der wir wieder leicht zeigen können, dass sie die Bewegungsgleichung mit den
Anfangsbedingungen erfüllt. Der Unterschied zur reibungsfreien Bewegung (2.6.2.6)
besteht bei schwacher Reibung darin, dass der Körper für einen Umlauf auf seiner
„Ellipsenbahn“ nun etwas länger braucht, und dass diese Ellipsenbahn nun eine elliptische Spirale ist, die langsam auf den Ursprung zusammen schrumpft. Dies erkennen wir auch am zeitlichen Verhalten des zugehörigen Drehimpulses. Denn multiplir
zieren wir die Bewegungsgleichung (2.6.2.14) wieder „kreuzweise“ mit x , so erhalten
wir
r
r
r&
r
r&
d r
dL
x × mx = −2d ( x × mx ) oder
= −2dL ,
dt
dt
(
)
was wieder eine einfache Differentialgleichung darstellt, von deren Lösung
r
r
L( t ) = e −2 dt L( 0 )
(2.6.2.16)
man leicht nachweist, dass sie die zugehörige Gleichung erfüllt. Die in (2.6.2.16) zum
Ausdruck kommende zeitliche Entwicklung des Drehimpulses bedeutet, dass die
53
r
Richtung des Drehimpulses immer parallel zur Anfangsrichtung L( 0 ) bleibt und die
Bewegung damit weiterhin eben ist, dass aber der Betrag des Drehimpulses immer
kleiner wird, in dem Maße, wie der an der Spiralfeder hängende Körper auf den Ursprung zu „spiralt“.
Wenn wir nun nach diesen theoretischen Untersuchungen zur experimentellen Seite
wechseln und etwa eine Kugel an einer Spiralfeder auf einer glatten Fläche um einen
Punkt 0 umlaufen lassen, dann finden wir, dass alle experimentell vorkommenden
Bewegungen in (2.6.2.15) enthalten sind. (2.6.2.15) beschreibt also die allgemeinste
Bewegung eines Körpers unter Einwirkung einer Spiralfeder und einer Reibungskraft,
die sich gemäß (2.6.2.13) modellieren lässt. Dies ist durchaus im Sinne des 2. Teiles
des „Newtonschen Programms“ bemerkenswert: Im Abschnitt 2.6.1 erhielten wir aus
einigen speziellen (nämlich kreisförmigen) Bahnkurven die Modellierung
r
r
FSpiralfeder = −kx für den Kraftvektor einer Spiralfeder. Im vorliegenden Abschnitt behaupteten wir dann versuchsweise, dass diese Modellierung nicht nur für Kreisbahnen sondern auch für die allgemeinste Bewegung unter der Einwirkung einer Spiralfeder gültig ist. Aus dieser Hypothese folgerten wir (unter Hinzunahme einer Reibungskraft) die Bahnkurven (2.6.2.15). Und die experimentelle Überprüfung ergibt
tatsächlich, dass die Modellierung (2.6.2.13) allgemein gültig ist!
Ganz das gleiche finden wir für die Schwerkraft: Aus einer Spezialisierung der
Keplerschen Gesetze auf Kreisbahnen fanden wir als geeignete Modellierung des
Schwerkraftvektors (2.6.1.11). Wenn wir nun die allgemeinste Lösung der Bewegungsgleichung für einen Massenpunkt der Masse m1 im Schwerefeld eines zweiten
Massenpunktes der Masse m2 ,
r
mmGr
m1 &x& = − 1 32 x ,
R
suchen, so finden wir (was wir hier aber nicht explizit tun wollen – die Theorie der
Differentialgleichungen ist uns hier kein Anliegen) nicht nur unsere Kreisbahnen wieder, sondern auch jene Ellipsenbahnen mit dem Massenpunkt m2 in einem ihrer
Brennpunkte, von denen die Keplerschen Gesetze (vgl. Seite 44 f.) sprechen. Also
54
haben wir auch in diesem Fall die Modellierung des Schwerkraftvektors zunächst
versuchsweise aus einigen Spezialfällen entnommen, damit aber bereits die allgemein gültige Form gefunden. Denn die damit vorhergesagten Keplerellipsen stimmen
mit den Beobachtungen ausgezeichnet überein.
2.6.3.
Schwerkraftmodellierung in Erdnähe
Von Seite 35 wissen wir, dass Galilei aus seinen Fallversuchen zur Überzeugung
kam, dass auf der Erde – ohne Luftwiderstand – alle Körper mit der gleichen Ber
schleunigung g = 9 ,81ms −2 fallen. Setzen wir dies auf der linken Seite des „2. Newr r Erdnähe
tonschen Axioms“ m&x& = FSchwerkraf
t , das ja für alle Bewegungen gilt, ein, so erhalten wir
r r Erdnähe
mg = FSchwerkraf
t.
(2.6.3.1)
r
Die Schwerkraft auf einen Körper der Masse m ist also mg . Wie passt dies zum
Schwerkraftvektor Newtons, für den wir in (2.6.1.11) speziell für die Gravitationskraft,
die ein Massenpunkt M Erde auf einen sich im Abstand R befindlichen und als Massenpunkt modellierten Körper der Masse mKörper ausübt, die Modellierung
r
m
M Gr
FSchwerkraft ( R ) = − Körper 3 Erde x
R
(2.6.3.2)
fanden? Dazu müssen wir nur bedenken, dass „Fallen in Erdnähe“ eine Fallhöhe von
maximal etwa D ≈ 3km bedeutet – wenn wir an einen Fallschirmspringer denken. Da
aber R vom Erdmittelpunkt aus gezählt werden muss, ist der relative Schwerkraftunterschied zwischen den Abständen R + D und R recht klein:
1
1
r
mKörper M ErdeG 2 −
2
∆FSchwerkraft
1
2D
RErde (RErde + D ) = 1 −
≈
≈ 10 −3 .
=
r
2
m
M
G
RErde
Körper
Erde
FSchwerkraft
D
1 +
2
RErde
RErde
55
Der relative Schwerkraftunterschied beträgt also nur etwa 1 0 00 . Deshalb genügt es,
für die Newtonsche Schwerkraft in Erdnähe einfach
r Erdnähe
r
M ErdeG
FSchwerkraf
= mKörper g
t ≈ mKörper
2
RErde
r
zu setzen, wobei die Richtung von g gleich der Richtung der Newtonschen Schwerr r
kraft in (2.6.3.2) ist, − x / RErde , also senkrecht zur Erdoberfläche und auf den Erdmit-
r M G
telpunkt gerichtet. Wenn wir für g = Erde
die Zahlenwerte für die Erdmasse, den
2
RErde
r
Erdradius und die Gravitationskonstante einsetzen, dann erhalten wir g ≈ 9 ,81 , also
das Galiläische Ergebnis.
2.6.4.
Bestimmung der Masse durch Wägung
Nun sind wir endlich in der Lage, jedem als Massenpunkt modellierbaren Körper eine
Massenzahl m zuzuordnen. Da die Masse eines Körpers ja ein Baustein im Gesamtmodell „Newtonsche Mechanik“ ist, kann eine solche Zuordnung auch nicht irgendwie unabhängig durch „Definition“, sondern nur im Rahmen der Newtonschen Mechanik erfolgen. Eine Möglichkeit dazu besteht in folgenden Schritten: Wir stellen den
Körper, dessen Masse wir bestimmen wollen, auf eine entsprechend ausgelegte Spiralfeder, wobei wir natürlich eine übliche Badezimmerwaage im Auge haben. Auf diesen Körper wirken dann im Wesentlichen zwei Kräfte ein: die Federkraft und die
Schwerkraft. Sind etwaige anfängliche kleine Schwingungen abgeklungen, dann ist
die „Bahn“ des zu messenden Körpers im Inertialsystem „Badezimmer“ ein Punkt
geworden, und Geschwindigkeit und Beschleunigung sind Null. Damit lautet das „2.
Newtonsche Axiom“ einfach
r r Erdnähe
r
r
0 = FSchwerkraf
t + FSpiralfeder = ( − mKörper g + k Feder ∆z )e z ,
(2.6.4.1)
56
r
mit ez als einem Einheitsvektor in z-Richtung. Kennen wir nun die Federkonstante
k Feder der benutzten Spiralfeder und die Strecke ∆z , die sie vom zu messenden Körper eingedrückt wurde, dann können wir aus (2.6.4.1) dem Körper die Masse
mKörper =
k Feder ∆z
g
(2.6.4.2)
zuordnen. Die Badezimmerwaage ist so geeicht, dass sie die Massenzahl mKörper in
der Einheit „Kilogramm“ anzeigt. Das bedeutet, dass sie genau die Masse 1 anzeigen
würde, wenn man den so genannten „Internationalen Prototyp des Kilogramms“, der
ein Platin-Iridium-Zylinder ist, und im „Bureau International des Poids et Mesures“ in
Sèvres bei Paris aufbewahrt wird, auf die Waage stellen würde.
Von dieser aus einer speziellen Anwendung des „2. Newtonschen Axioms“ in Verbindung mit der Schwerkraft für jeden Körper angebbare Massenzahl mKörper stellt
sich heraus, dass sie auch zu keinerlei Widersprüchen führt, wenn sie im Rahmen
der Newtonschen Mechanik in anderen Anwendungen benutzt wird.
2.7. Newtonsche Mechanik und „Starrer Körper“
Im Abschnitt 2.3. haben wir überlegt, wann wir für die Anwendung der Newtonschen
Mechanik ein reales Objekt, dessen Bewegung wir entweder vorhersagen, oder –
wenn wir sie bereits beobachtet haben – verstehen wollen, als Massenpunkt modellieren können. In vielen Fällen, insbesondere auch in der Biomechanik, ist uns die in
r
einem einzigen Ortsvektor x( t ) enthaltene Information für die Bewegung des betrachteten Körper zu wenig. Es interessiert uns zumindest noch die instantane Orientierung des Körpers relativ zu dem von uns gewählten Bezugssystem. In solchen Fällen modellieren wir den Körper als einen so genannten „Starren Körper“. Damit meinen wir, dass wir uns den Körper aus sehr vielen Massenpunkten aufgebaut denken,
die aber im Zeitablauf ihre gegenseitigen Abstände nicht ändern können. In diesem
Sinn ist der Modellkörper also „starr“.
57
Eine noch aufwendigere Modellierung eines realen Körpers könnte durch Verbindung
mehrerer „Starrer Körper“ geschehen, um etwa beim Geräteturnen eine Relativbewegung von Rumpf und Beinen zu ermöglichen. Eine andere über den „Starren Körper“ hinausgehende Modellierung wäre die eines „Elastischen Körpers“, den wir uns
auch wieder aus sehr vielen Massenpunkten aufgebaut denken, die aber im Zeitablauf ihre gegenseitigen Abstände ein Wenig verändern können. Das „ein Wenig“ bedeutet dabei genauer, dass die relativen Abstandsänderungen ∆d d kleine Zahlen
sind. Ein schwindender Stab wird beispielsweise als „Elastischer Körper“ modelliert.
In dieser Arbeit begnügen wir uns jedoch mit dem Modell des „Starren Körpers“. Weil
wir uns diesen aus sehr vielen Massenpunkten aufgebaut denken, und weil wir in der
Newtonschen Massenpunktmechanik die Bahn eines Massenpunktes mit einem
Ortsvektor beschrieben haben, könnte man zunächst meinen, dass wir nun beim
„Starren Körper“ mit ebenso vielen Ortsvektoren wie Massenpunkten arbeiten müssten! Dem ist aber glücklicherweise nicht so. Um aber zu zeigen, dass es viel einfacher – wenn auch notgedrungen komplizierter als beim Massenpunkt – geht, müssen
wir voraus zwei Konzepte einführen, den „Schwerpunkt“ eines „Starren Körpers“ und
dessen „Drehimpuls“.
2.8. Der „Schwerpunkt“ eines „Starren Körpers“
Unsere Argumente für die Modellierbarkeit eines Körpers als Massenpunkt waren
einerseits unser Interesse an einer bloß groben Bewegung des Objektes, andererseits dessen kleine räumliche Ausdehnung im Verhältnis zu den restlichen Dimensionen des betrachteten Vorgangs. Trotz dieser groben Betrachtungsweise stellt sich
immer noch die Frage, in welchen Punkt des Körpers wir den Ortsvektor des modellierenden Massenpunktes legen. Es ist zwar richtig, dass die Platzierung des Ortsvektors manchmal keine große Rolle spielt, ganz allgemein empfiehlt sich dafür jedoch ein besonderer Punkt des Körpers, den wir seinen „Schwerpunkt“ nennen, und
dessen (zeitabhängigen) Ort in unserem Bezugssystem – also dessen Bahnkurve r
wir mit s ( t ) bezeichnen.
58
Zur Auffindung des Schwerpunktes eines ausgedehnten Körpers zerlegen wir diesen
in viele kleine Massenelemente ∆mi , i = 1,2 ,3 ,...... , und denken uns zu jedem dieser
r
r
Massenelemente einen Ortsvektors xi ( t ) gezogen. Als Bahn s ( t ) des Schwerpunktes dieses Körpers nehmen wir nun das mit ∆mi gewichtete arithmetische Mittel aller
Ortsvektoren,
r
∑ ∆m x
r
s( t ) =
∑ ∆m
i i
i
.
(2.7.1.1)
i
i
Aus (2.7.1.1) ist ersichtlich, dass der Vektor zu einem Massenelement umso mehr
zählt, je größer die zu diesem Massenelement gehörige Masse ∆m ist. Deshalb heißt
(2.7.1.1) auch „gewichtetes arithmetisches Mittel“. Der Ausdruck (2.7.1.1) gilt für den
Schwerpunkt eines „Starren Körpers“ und eines „Elastischen Körpers“.
Im Hinblick auf den folgenden Abschnitt ist eine ebenso einfache wie nützliche Überlegung im Zusammenhang mit (2.7.1.1) von Vorteil. Wie in Abb. 2.7.1 dargestellt,
zerlegen dazu jeden Ortsvektor gemäß
r
r
r
xi ( t ) = s ( t ) + ri ( t ) ,
(2.7.1.2)
d. h. wir „gehen“ vom Ursprung 0 nicht direkt zum i-ten Massenpunkt, sondern zuerst
r
r
entlang des Vektors s zum Schwerpunkt, und erst dann entlang des Vektors ri zum
i-ten Massenpunkt.
Abbildung 2.7.1: Zerlegung eines Ortsvektors in
r
r
r
xi (t ) = s (t ) + ri (t )
59
Setzen wir nun die Zerlegung (2.7.1.2) in die Definition des Schwerpunktes (2.7.1.2)
ein, so finden wir
r
r
r
r
∑ ∆m [ s ( t ) + r ( t )] r ∑ ∆m ∑ ∆m r ( t ) r
∑ ∆m r ( t )
r
.
= s( t )
+
= s( t ) +
s( t ) =
∑ ∆m
∑ ∆m
∑ ∆m
∑ ∆m
i
i
i i
i
i
i
i
i
i
i
i
i i
i
i
i
i
i
Aus einem Vergleich der linken mit der rechten Seite schließen wir, dass
r
r
∑ ∆m r ( t ) = 0 ,
(2.7.1.3)
i i
i
und damit ebenso
r
d
∆mi ri ( t ) =
∑
dt i
r
r
∑ ∆mi r&i ( t ) = 0
(2.7.1.4)
i
Untersuchen wir nun den Schwerpunkt des einfachsten „Starren Körpers“, nämlich
zwei in Hantelart starr verbundene Massenpunkte, vgl. Abb. 2.7.2. Die Anwendung
von (2.7.1.1) liefert
Abbildung 2.7.2: Zwei starr miteinander verbundene Massenpunkte
r
r
r
m1 x1 + m2 x2 r
m2
(xr2 − xr1 ) .
s( t ) =
= x1 +
m1 + m2
m1 + m2
(2.7.1.2)
Die Form nach dem ersten Gleichheitszeichen entspricht (2.7.1.1), während die identische Umformung nach dem zweiten Gleichheitszeichen darlegt, dass der Schwer-
60
r
r
punkt erwartungsgemäß auf der Verbindungslinie von x1 nach x2 liegt, und zwar um
r
so näher bei x2 , je größer m2 im Verhältnis zu m1 ist. Für den Spezialfall m1 = m2
lehrt uns diese Umformung, dass dann der Schwerpunkt in der Mitte der Verbinr
r
dungslinie von x1 nach x2 liegt, vgl. Abb. 2.7.3.
Abbildung 2.7.3: Schwerpunkt eines „hantelförmigen“ Körpers
Falls wir den „hantelförmigen“ Körper in der Abb. 2.7.3 als Massenpunkt modellieren,
könnten wir für den „Ort“ der Hantel ihren Schwerpunkt wählen (vgl. Abb. 2.7.4).
Abbildung 2.7.4: Modellierung eines „hantelförmigen“ Körpers als Massenpunkt
Ein allgemeineres Beispiel für das Konzept „Schwerpunkt“ wäre etwa ein Kletterer: In
den folgenden Abbildungen (Abb. 2.7.5 und Abb. 2.7.6) ist die Aufteilung seines Körpers in Massenelemente ∆mi schematisch angedeutet. Denken wir uns noch die
r
Ortsvektoren xi (t ) zu jedem dieser Massenelemente gezogen, dann erhalten wir aus
r
der (2.7.1.3) den Schwerpunkt s ( t ) des Kletterers. Während dieser höher steigt, ver-
61
verändert sich der Ort des Schwerpunktes laufend - er ist, wie angedeutet, von der
Zeit abhängig.
Abbildung 2.7.5: Modellierung eines Kletterers als Ansammlung von Massenpunkten
Abbildung 2.7.6: Schwerpunkt eines Kletterers
Wenn es für die Beschreibung bestimmter Bewegungen eines Menschen wichtig ist,
dass dieser seine Haltung ändern kann, dann reicht eine Modellierung als starrer
Körper nicht aus. Da der Schwerpunkt von der Verteilung der Massen abhängig ist,
wird dessen Position natürlich von der Körperhaltung beeinflusst. Bei einer aufrechten Haltung befindet sich der Körperschwerpunkt etwa im Bauchraum auf Höhe des
Bauchnabels. Bei bestimmten Körperhaltungen kann die Lage des Körperschwerpunktes allerdings sehr von dieser Lage abweichen und manchmal sogar außerhalb
des Körpers liegen. Denken wir beispielsweise an die extremen Körperhaltungen einer Bodenturnerin:
62
Abbildung 2.7.7: Der Körperschwerpunkt liegt in dieser Haltung nicht mehr im Bauchraum sondern
außerhalb des Körpers.
2.9. Die Bewegungsgleichungen des „Starren Körpers“
Wie kommen wir von der Newtonschen Mechanik für Massenpunkte zu einer Verallgemeinerung für „Starre Körper“? Indem wir in bester didaktischer Tradition dort zu
beginnen versuchen, wo wir uns bereits auskennen. Unsere gedachte Zerlegung eines „Starren Körpers“ in einzelne Massenelemente war ja bereits der Versuch, den
„Starren Körper“ auf Massenpunkte zurückzuführen. Diesen Weg gehen wir jetzt
konsequent weiter, und schreiben die Newtonschen Bewegungsgleichungen für alle
diese Massenelemente untereinander an:
r
r
r
Massenelement 1: ∆m1 &x&1 ( t ) = F1extern + ∑ F1←k
k ≠1
r
r
r
Massenelement 2: ∆m2 &x&2 ( t ) = F2extern + ∑ F2←k
k ≠2
r
r
r
Massenelement 3: ∆m3 &x&3 ( t ) = F3extern + ∑ F3←k
k ≠3
Massenelement 4: ..........................................
(2.7.2.1)
Auf den linken Seiten dieser Bewegungsgleichungen steht das Produkt aus der Masse des k-ten Massenelementes ∆mk und der Beschleunigung dieses Massenelemen-
63
r
tes &x&k ( t ) . Auf den rechten Seiten sind die „externen“ und die „inneren“ Kräfte getrennt ausgewiesen. Die „inneren“ Kräfte werden von den übrigen Massenelementen
des „Starren Körpers“ auf das k-t Massenelement ausgeübt. Daher fehlt unter den
r
„inneren“ Kräften jeweils der Term Fk ←k , weil ja das k-te Massenelement auf sich
selbst keine Kraft ausübt. Die externen Kräfte werden von der Umgebung auf den
„Starren Körper“ ausgeübt, und erscheinen nur in der Bewegungsgleichung jener
Massenelemente, an denen sie angreifen.
Nun addieren wir alle Gleichungen (2.7.2.1) mit dem Ergebnis
r extern
r
∑ ∆m &x& ( t ) = ∑ F
i i
i
i
i
r
+ ∑∑ Fi←k .
i
(2.7.2.2)
k
In der Doppelsumme über die „inneren“ Kräfte fehlt natürlich noch immer der Term
r
r
r
Fk ←k , doch mit einer Kraft Fm←n kommt in dieser Summe immer auch eine Kraft Fn←m
r
r
vor. Nach dem „3. Newtonschen Axiom“ ist aber Fn←m = − Fm←n , weil mit einer bestimmten Kraft des m-ten auf das n-te Massenelement auch das n-te auf das m-te
Massenelement eine gleich große, aber entgegen gesetzt gerichtete Kraft ausübt.
Aus diesem Grunde ist in (2.7.2.2) die Doppelsumme über die inneren Kräfte gleich
Null! Wenn wir noch die linke Seite mit der Gesamtmasse
M gesamt = ∑ ∆mi
(2.7.2.3)
i
erweitern, erhalten wir also mit (2.7.1.1) die Gleichung
r
r
M gesamt &s&( t ) = ∑ Fi extern ,
(2.7.2.4)
i
die in Worten schlicht und einfach besagt, dass sich der Schwerpunkt so bewegt, als
sei er ein Massenpunkt mit der gesamten Masse M gesamt des „Starren Körpers“, auf
den alle äußeren Kräfte einwirken, die auch auf den „Starren Körper“ einwirken.
64
Wir sollten uns bewusst machen, dass wir die Bewegungsgleichung (2.7.2.4) auch
ohne Umweg erhalten hätten, wenn wir eine Modellierung des vorliegenden realen
Körpers als „Starren Körper“ gar nicht erst ins Auge gefasst hätten, sondern gleich
auf das Modell des Massenpunktes losgesteuert wären. Wir hätten dann den vorliegenden Körper auf eine Waage gelegt und als Massenzahl M gesamt abgelesen, wir
hätten den Schwerpunkt des realen Körpers als repräsentativen „Ort“ zur Beschreibung der Bahnkurve des Massenpunktes gewählt, und wir hätten – unabhängig von
ihrem tatsächlichen Angriffspunkt am realen Körper - alle Kräfte an diesem „Ort“ angreifen lassen, ganz so wie wir es bisher bei allen Massenpunktproblemen getan haben. Wären wir also mit einer Massenpunkt-Modellierung zufrieden, könnten wir uns
jetzt dem Auffinden der Bahnkurve des Schwerpunktes unseres „Starren Körpers“
zuwenden.
Wir wollen aber mehr. Und da in der Gleichung (2.7.2.4) die Orientierung des „Starren Körpers“ in keiner Weise eingegangen ist, wir jedoch eine Beschreibung dieser
im Zeitablauf wechselnden Orientierung anstreben, müssen wir uns überlegen, wie
wir eine solche Beschreibung ins Spiel bringen können.
Wie lässt sich zunächst einmal die „Orientierung“ des „Starren Körpers“ genauer fassen? Ganz einfach: Wir denken ihn uns aus Hartschaum ausgeführt, durch dessen
Schwerpunkt wir drei dünne, zu einander senkrechte Stricknadeln gesteckt haben,
die wir als x − , y − , und z − Achse bezeichnen (während die x − , y − , und z − Achse
ohne Querstrich unser inertiales Bezugssystem bezeichnen). Mit diesen drei „Stricknadeln“ lässt sich die instantane Orientierung unseres „Starren Körpers“ genau festlegen. Durch die Angabe der beiden Winkel, die die z − Achse mit der x − und
y − Achse unseres Bezugssystems bildet, ist die Orientierung dieser z − Achse be-
reits fest gelegt. Die noch verbleibende Orientierungsmöglichkeit des „Starren Körpers“ besteht dann in einer Drehung der x − (und y − )Achse um die z − Achse. Dazu
ist die Angabe noch eines Winkels erforderlich. Insgesamt sind also drei Zahlenangaben zur Festlegung der Orientierung des „Starren Körpers“ notwendig.
Die Orientierung des „Starren Körpers ließe sich noch auf andere als der hier besprochenen Weise festlegen, immer aber sind dazu drei Zahlenangaben erforderlich.
Also könnten wir auch die drei Komponenten eines geeigneten Vektors dafür heran-
65
ziehen. Ein solcher Vektor ist der Gesamtdrehimpuls des „Starren Körpers“, worunter
wir einfach die Summe aller Drehimpulse der einzelnen Massenelemente meinen,
aus denen wir uns den „Starren Körper“ aufgebaut gedacht haben. Auf Seite 52 führten wir bereits den Drehimpuls (relativ zum Ursprung 0 des Bezugssystems) eines
r
r
Massenpunktes der Masse m am Ort x( t ) , der sich mit der Geschwindigkeit x& ( t )
bewegt, als
r
r r
x × mx& = L( 0 )
(2.6.2.11)
r
ein (wobei der obere Index „(0)“ am Symbol „ L “ andeuten soll, dass diese Größe der
Drehimpuls relativ zum Ursprung 0 ist). Deshalb ist klar, dass wir den Drehimpuls
eines einzelnen Massenelementes unseres „Starren Körpers“ als
r (0 )
r
r
xi × ∆mi x&i = ∆Li
einführen. Der Gesamtdrehimpuls des „Starren Körpers“ relativ zum Ursprung ist
dann natürlich
r
r (0 )
r
r
L( 0 ) = ∑ ∆Li = ∑ xi × ∆mi x&i ,
i
i
oder, wenn wir die Zerlegung (2.7.1.2) einführen,
[
(
)] (
)
r
r r
r r
r r
r r r
r
r
r
L( 0 ) = ∑ (s + ri ) × ∆mi s& + r&i = s × s& ∑ ∆mi + ∑ ∆mi ri × s& + s × ∑ ∆mi r&i + ∑ ri × ∆mi r&i .
i
i
i
i
i
Von den vier Termen nach dem zweiten Gleichheitszeichen sind allerdings der zweite und der dritte wegen (2.7.1.3) und (2.7.1.4) Null, so dass wir unter Verwendung
(2.7.2.3) mit der Beziehung
r
r
r r
r r
r
r
L( 0 ) = s × M ges s& + ∑ ri × ∆mi r&i = s × M ges s& + L( S )
(2.7.2.5)
i
r
verbleiben. Der Drehimpuls eines „Starren Körpers“ relativ zum Ursprung, L( 0 ) , setzt
sich also zusammen aus dem Drehimpuls eines Massenpunktes mit der Gesamt-
66
masse M ges des „Starren Körpers“ am Ort des Schwerpunktes des „Starren Körpers“,
r
r
s × M ges s& , und dem Drehimpuls des „Starren Körpers“ relativ zu seinem Schwerpunkt,
r
L( S ) . Aus (2.7.2.5) erhalten wir durch Ableitung nach der Zeit
r
r
r&
r
r& r
r& dL( S )
dL( 0 ) r
&
&
&
= s × M ges s + ∑ ri × ∆mi ri = s × M ges s +
.
dt
dt
i
(2.7.2.6)
Wenn wir den Drehimpuls für die Beschreibung der instantanen Orientierung des
„Starren Körpers“ wählen, und diese instantane Orientierung natürlich von den Einr
r
wirkungen aus der Umgebung abhängt, dann müssen wir L( 0 ) bzw. dL( 0 ) dt selbstverständlich aus den Bewegungsgleichungen (2.7.2.1) der einzelnen Massenelemente, aus denen der „Starre Körper“ aufgebaut ist, gewinnen: Denn letztlich sind es diese Gleichungen, die die Reaktion des „Starren Körpers“ auf die Einwirkung aus der
Umgebung beschreiben.
Der Weg von den Bewegungsgleichungen (2.7.2.1) zur zeitlichen Änderungsrate des
Drehimpulses stellt kein Problem dar, wenn wir uns an die Vorgangsweise aus Abschnitt 2.6.2 erinnern. Wir multiplizieren jede Gleichung in (2.7.2.1) zuerst „kreuzweir
r
se“ mit xi . Dann zerlegen wir xi gemäß (2.7.1.2), und addieren anschließend alle
Gleichungen auf, mit dem Zwischenresultat
r
s r
r r
r
r
r
r r
s × M ges &s& + ∑ ri × ∆mi &r&i = s × ∑ Fi extern + ∑ ri × Fi extern + ∑∑ xi × Fi←k . (2.7.2.7)
i
i
i
i
k
Wenn wir hier den ersten Term auf der rechten Seite auf die linke Seite schreiben
r
und s herausheben, dann lautet die Gleichung
r
r
r
r
r
s r
r r
s × M ges &s& − ∑ Fi extern + ∑ ri × ∆mi &r&i = ∑ ri × Fi extern + ∑∑ xi × Fi←k .
i
i
i
k
i
(2.7.2.8)
Da der Term in der runden Klammer gerade die Bewegungsgleichung (2.7.2.4) für
den Schwerpunkt des „Starren Körpers“ ist, ist dieser Term also zu allen Zeiten Null,
und die Gleichung (2.7.2.8) vereinfacht sich weiter zu
67
r
r
r
r extern
∑ r × ∆m &r& = ∑ r × F
i
i
i i
i
i
i
r r
+ ∑∑ xi × Fi←k ,
i
k
r
r
r& dL( S )
&
oder, wenn wir aus (2.7.2.6) noch ∑ ri × ∆mi ri =
übernehmen, zu
dt
i
r
s r
r r
dL( S )
= ∑ ri × Fi extern + ∑∑ xi × Fi←k
dt
i
i
k
(2.7.2.9)
Nun nehmen wir uns noch den Term mit den inneren Kräften vor und zeigen, dass
auch dieser Null ist. Wir umgehen jedoch die selbstverständlich mögliche formale
Herleitung dieser Tatsache und begnügen uns mit einer qualitativen Argumentation.
Dazu machen wir uns klar, dass dann, wenn die Doppelsumme in (2.7.2.9) beir
r
r
r
spielsweise den Term x19 × F19←34 enthält, sie auch den Term x34 × F34←19 enthalten
r
muss. Denn wenn das 34. Massenelement mit der Kraft F19←34 auf das 19. Massenr
element einwirkt, dann wirkt auch das 19. Massenelement mit der Kraft F34←19 auf
r
r
das 34. ein. Noch dazu gilt nach dem „3. Newtonschen Axiom“, dass F34←19 = − F19←34
r
r
r
ist. Wir können also die beiden Terme zu ( x19 − x34 ) × F19←34 zusammenfassen. Und
weil die einzig denkbare Kraft, die das 34. Massenelement auf das 19. Masseneler
r
r
r
r
ment ausübt, die Richtung von ( x19 − x34 ) haben muss, können wir ( x19 − x34 ) × F19←34
r
r
r
r
r
r
detaillierter als ( x19 − x34 ) × f 19←34 ( x19 − x34 )( x19 − x34 ) schreiben. Dieser Term ist aber
offensichtlich Null, weil das „Kreuzprodukt“ zweier paralleler Vektoren Null ist. Da wir
die gleiche Argumentationskette auf alle zusammengehörenden Terme der Doppelsumme in (2.7.2.9) anwenden können, ist die ganze Doppelsumme Null, und wir erhalten endgültig
r
s r
dL( S )
= ∑ ri × Fi extern .
dt
i
(2.7.2.10)
Zusammen mit (2.7.2.4) stellt diese Gleichung für die zeitliche Änderungsrate des
Drehimpulses relativ zum Schwerpunkt die gesuchten Bewegungsgleichungen für die
68
Bahnkurve und für die zeitliche Abfolge der räumlichen Orientierungen eines „Starren
Körpers“ dar.
Das Nachvollziehen aller Schritte der Herleitung dieser beiden Gleichungen ist für
den in der mathematischen Sprache Ungeübten sicher nicht einfach. Dennoch ist es
von großem Wert einzusehen, dass die beiden Gleichungen im Rahmen der Newtonschen Mechanik abgeleitet wurden, ohne diesen Rahmen je zu verlassen (d. h.
ohne je Argumente zu benutzen, die nicht zur Newtonschen Mechanik gehören). Hätten wir sie einfach angeschrieben, wüssten wir nun nicht, dass sich die Herleitung
zur Gänze innerhalb des rechten Schenkels der Abb. 2.1.1 bewegt, wo mit Hilfe der
mathematischen Schlussregeln im Modell von Anfang an vorhandene Eigenschaften
deutlicher sichtbar gemacht werden. Auch sei an dieser Stelle wieder einmal daran
erinnert, dass die Begriffe „Schwerpunkt“, „Drehmoment“, „Drehimpuls“ in der realen
Welt genau so wenig existieren, wie der „Starre Körper“, dem wir sie zuweisen. Genau so wenig wie die Begriffe „Kraft“, „Beschleunigung“ usw., die wir dem in der realen Welt ebenfalls nicht existierenden „Massenpunkt“ zugeordnet haben. Erst durch
die festgestellte hohe Brauchbarkeit im Rahmen der Newtonschen Mechanik erlangen sie ihre Berechtigung.
Während uns der Aussagewert der „Schwerpunktsgleichung“ aus der Massenpunktmechanik vertraut ist, bedarf die „Drehimpulsgleichung“ (2.7.2.10) noch einer eingehenden Untersuchung. Die Summanden in der Summe auf der rechten Seite dieser
Gleichung heißen die „Drehmomente der äußeren Kräfte relativ zum Schwerpunkt“.
r
Wenn die äußere (d. h. von der Umgebung verursachte) Kraft Fkextern an einem Punkt
r
des „Starren Körpers“ angreift, der vom Schwerpunkt aus mit dem Vektor rk erreichbar ist (Abb. 2.7.8), dann sagen wir, es wirke auf den „Starren Körper“ relativ zu desr
r r
sen Schwerpunkt ein Drehmoment Dkextern = ri × Fkextern . Die zeitliche Änderung des
Drehimpulses des „Starren Körpers“ wird also durch die aus der Umgebung einwirkenden Drehmomente verursacht.
69
Abbildung 2.7.8: Angriffspunkte der Kräfte
In der Abb. 2.7.8 gibt es drei verschiedene Angriffspunkte von Kräften, daher wirken
r
auch insgesamt drei Drehmomente. Aus der Richtung der Kraft Fkextern und aus der
r
Richtung des zugehörigen „Kraftarmes“ rk ergibt sich die Richtung des daraus gebildeten Drehmomentes als „Kreuzprodukt“ dieser beiden Vektoren gemäß
r
r r
Dkextern = ri × Fkextern . Aus der Größe des Drehmomentes ergibt sich wiederum, zu welcher Art von Änderung des Drehimpulses dieses Drehmoment beiträgt. Sind Kraft
und Kraftarm parallel zu einander, so ist das zugehörige Drehmoment Null, sind sie
senkrecht aufeinander, ist das Drehmoment gleich dem Produkt aus Betrag der Kraft
und Betrag des Kraftarmes. Auch bewirkt bei gleicher Kraft ein längerer Kraftarm ein
größeres Drehmoment und damit eine stärkere Änderung des Drehimpulses. Je weiter wir vom Schwerpunkt entfernt sind, desto „effektiver“ ist unsere Krafteinwirkung.
Als kleine Anwendung überlegen wir uns, dass die Schwerkraft relativ zum Schwerpunkt des „Starren Körpers“ kein Drehmoment bewirken kann. Denn obwohl die
Schwerkraft auf alle Massenelemente des „Starren Körpers“ mit der Kraft
r
r
Fi Schwerkraft = ∆mi g einwirkt, ergibt sich in der Summe auf Grund von (2.7.1.3) für das
Gesamtdrehmoment der Schwerkraft relativ zum Schwerpunkt:
r
r
r
r
r r r r r
D Schwerkraft = ∑ DiSchwerkraft = ∑ ri × ∆mi g = ∑ ∆mi ri × g = 0 × g = 0 .
i
i
i
70
Nach dieser Diskussion der Terme auf rechen Seite der Gleichung (2.7.2.10) begeben wir uns nun auf die linke Seite, zur zeitlichen Änderungsrate des Drehimpulses
relativ zum Schwerpunkt des „Starren Körpers“. Unser Ziel bei der Herleitung der
Drehimpulsgleichung (2.7.2.10) war die Vorhersage der Orientierung des „Starren
r
Körpers“ im Zeitablauf. Durch die Lösung dieser Gleichung erhalten wir L( S ) ( t ) , da
wir ja die Drehmomente als Einwirkungen aus der Umgebung als bekannt annehr
men. Deshalb stellt sich uns zuerst einmal die Frage, wie dieses L( S ) ( t ) mit den drei
Winkeln zusammenhängt, mit denen wir auf Seite 65 die Orientierung des „Starren
Körpers“ festlegten. Um der Antwort auf die gestellte Frage näher zu kommen, erinr
nern wir uns, dass wir oben L( S ) ( t ) als Summe der Drehimpulse der einzelnen Massenelemente relativ zum Schwerpunkt einführten,
r
r
r
r
L( S ) = ∑ L(i S ) =∑ ri × ∆mi r&i .
i
(2.7.2.11)
i
In Abb. 2.7.8 ist ein „Starrer Körper“ angedeutet, der sich im Sinne einer Rechtsr
r
schraube um die .Richtung von ω ( t ) mit der Winkelgeschwindigkeit ω ( t ) dreht. Von
diesem.„Starren Körper“ ist insbesondere das Massenelement ∆mi hervorgehoben,
r
r
das sich vom Schwerpunkt S aus gesehen am Ort ri ( t ) befindet.
Abbildung 2.7.8: Drehbewegung
71
Da es sich um einen „Starren Körper“ handelt, bei dem sich der Abstand irgend
zweier seiner Punkte im Zeitablauf nicht ändern darf, darf sich also die Länge von
r
ri ( t ) , als Abstand des Schwerpunktes vom i-ten Massenelement, nicht ändern,
r
r
r
ri ( t ) ⋅ ri ( t ) = ri 2 ( t ) = const . Bilden wir davon die zeitliche Ableitung, so erhalten wir
r
r
r
r
r&i ( t ) ⋅ ri ( t ) = 0 . Bei konstanter Länge von ri ( t ) steht also die Geschwindigkeit r&i ( t )
r
senkrecht auf ri ( t ) , was auch anschaulich einleuchtet. Nun lässt sich aber der allr
r
r
gemeinste auf ri ( t ) senkrechte Vektor als „Kreuzprodukt“ ω ( t ) × ri ( t ) darstellen. Dar
r
her muss sich das auf ri ( t ) senkrechte r&i ( t ) als
r
r
r
r&i ( t ) = ω ( t ) × ri ( t ) ,
(2.7.2.12)
r
darstellen lassen, was auch betragsmäßig richtig ist, wenn wir ω ( t ) die obige Bedeu-
tung geben. Wir wissen ja von früher (vgl. Seite 42), dass
r
r
r&i ( t ) = ρ i ω ( t ) ,
r
ist, wenn ρ i den kürzesten Abstand zwischen Drehachse ω ( t ) und Massenelement
r
∆mi bezeichnet. Berechnen wir r&i ( t ) aus (2.7.2.12) unter Beachtung der Definition
es „Vektorproduktes“, so finden wir
r
r
r
r r
r&i ( t ) = ω ( t ) ri ( t ) sin(∠ω , ri ) ,
r r
r
wobei aus der Abb. 2.7.8 hervorgeht, dass ρ i = ri (t ) sin (∠ω , ri ) ist. Die Darstellung
der Geschwindigkeit mit (2.7.2.12) ist also nach Betrag und Richtung korrekt.
Der Drehimpuls dieses Massenelementes ∆mi bezüglich des Schwerpunktes ist
dann gemäß (2.7.2.11) und (2.7.2.12)
[
]
r
r
r r2
r
r
r
r
r
r
r
L(i S ) = ri (t ) × ∆mi r& (t ) = ∆mi ri (t ) × [ω (t ) × ri (t )] = ∆mi ω (t )ri (t ) − ri (t )(ω (t ) ⋅ ri (t ) )
(2.7.2.13)
72
und die Summe der Drehimpulse aller Massenelemente
[
]
r
r
r r2
r
r
r
L( S ) = ∑ L(i S ) = ∑ ∆mi ω ( t )ri ( t ) − ri ( t )(ω ( t ) ⋅ ri ( t )) .
i
(2.7.2.14)
i
r
Der Drehimpuls L( S ) ( t ) des „Starren Körpers“ hängt also mit der Winkelgeschwindigr
keit ω ( t ) zusammen, und diese wieder mit drei Orientierungswinkeln. Im Prinzip
r
kann man aus der Größe L( S ) ( t ) , die man ja nach Lösung der Drehimpulsgleichung
r
(2.7.2.10) zur Verfügung hat, ω ( t ) berechnen, und daraus wieder die instantane
r
r
Drehachse und Drehwinkel {eDrehachse (t ), ϕ (t ); eDrehachse (t ) = 1}, die die augenblickliche
Orientierung des „Starren Körpers“ beschreiben. Dies ist mathematisch sauber möglich, nur sind dazu mehr Mathematikkenntnisse erforderlich, als wir hier voraussetzen.
r
Aus (2.7.2.14) ist ersichtlich, dass der Drehimpuls L( S ) ( t ) im Allgemeinen nicht paralr
lel zur Winkelgeschwindigkeit ω ( t ) gerichtet ist. Und die Winkelgeschwindigkeit ist
r
ihrerseits nicht parallel zur Drehachse eDrehachse (t ) jener Drehung, die die instantane
r
Orientierung des „Starren Körpers“ beschreibt. Dies ist nur so, wenn eDrehachse (t ) nicht
von der Zeit abhängt. Dann gilt also
r
r
r
ω (t ) = ω (t )eDrehachse , mit ω ( t ) = ω ( t ) .
(2.7.2.15)
r
r
Für die Komponente des Drehimpulses in Richtung eDrehachse ( eDrehachse ist ja ein Vektor
der Länge Eins) erhalten wir dann aus (2.7.2.14)
r
r
r
r 2
eDrehachse ⋅ L( S ) = ∑ ∆mi (eDrehachse × ri (t ) ) ω (t ) = ∑ ∆mi ρ i2 ω (t )
i
i
(2.7.2.16)
Diese Komponente ist also das Produkt aus dem Betrag der Winkelgeschwindigkeit
r
und dem „Trägheitsmoment“ Θ(eDrehachse ) des „Starren Körpers“ relativ zur Achse
r
eDrehachse ,
73
r
r
r 2
Θ(eDrehachse ) = ∑ ∆mi (eDrehachse × ri (t ) ) = ∑ ∆mi ρ i2 .
i
(2.7.2.17)
i
Abbildung 2.7.9
r
Darin sind die ρ i wie oben die kürzesten Verbindungen von der Drehachse eDrehachse
zu den einzelnen Massenelementen, aus denen der „Starre Körper“ aufgebaut ist
(vgl. Abb. 2.7.9).
Da die Größe der Komponente des Drehimpulses des „Starren Körpers“ in Richtung
r
der Drehachse eDrehachse also wesentlich vom „Trägheitsmoment“ des „Starren Körr
pers“ relativ zu dieser Drehachse eDrehachse abhängt, und wir andererseits aus der
r
Drehimpulsgleichung den Drehimpuls L( S ) ( t ) erhalten, tun wir gut daran, einen etwas
eingehenderen Blick auf das „Trägheitsmoment“ zu werfen.
Grob gesprochen repräsentiert das Trägheitsmoment bezüglich einer gegebenen
Drehachse die Massenverteilung des Körpers um diese Achse. Von zwei „Starren
Körpern“ der gleichen Gesamtmasse, die um die gleiche Achse rotieren, wird jener
Körper ein größeres Trägheitsmoment besitzen, dessen Teilmassen im Mittel weiter
weg von der Drehachse angeordnet sind. Dann sind ja die ρ i ’s im Mittel größer, was
nach (2.7.2.17) zu einem größeren Trägheitsmoment führt. Ein Beispiel dafür sind
die Salti (ohne Schrauben) von Wasserspringern, die von ein und demselben Springer entweder gehockt, gehechtet oder gestreckt durchgeführt werden können. Dabei
ist das Trägheitsmoment in der gehockten Version am kleinsten, und in der gestreckten Version am größten (vgl. Abb. 2.7.10).
74
Abbildung 2.7.10: Salto gehockt
Salto gestreckt
Verschiedene Drehachsen und verschiedene Anordnungen der Körperteile (etwa
angewinkelte und weggestreckte Arme) führen bei dem als „Starrer Körper“ modellierten menschlichen Körper zu verschiedenen Trägheitsmomenten. In der Praxis
werden diese Trägheitsmomente nicht numerisch berechnet sondern experimentell
bestimmt. Die erhaltenen Werte sind natürlich vom Körperbau der Sportler abhängig,
und es hat sich als brauchbar herausgestellt, das Trägheitsmoment um bestimmte
Achsen in bestimmten Körperhaltungen im Verhältnis zum Trägheitsmoment in einer
definierten „Grundhaltung“ mit zugehöriger Achse des Sportlers gemäß Abb. 2.7.11
anzugeben.
Abbildung 2.7.11: Trägheitsmoment verschiedener Positionen und Drehachsen
75
Die einfachste, in der Biomechanik dennoch häufige, Form der Drehimpulsgleichung
(2.7.2.10) liegt vor, wenn überhaupt keine äußeren Drehmomente am Werke sind.
r
Dann reduziert sich (2.7.2.10) zu dL( S ) ( t ) dt = 0 , woraus folgt
r
r
L( S ) ( t ) = L( S ) ( 0 ) ,
(2.7.2.18)
Der Drehimpuls ist also konstant. Dieser Fall ist deshalb so häufig, weil wir uns auf
Seite 71 überlegt haben, dass die ja immer vorhandene Schwerkraft relativ zum
Schwerpunkt kein Drehmoment bewirken kann. Lassen wir daher bei einem Wasserspringer vom 10-Meter-Turm, bei einem Fallschirmspringer, bei einem Abfahrtsläufer
während eines Sprunges, bei dem er durch geeignete Schihaltung Ober- und Unterluft vermeidet, die Drehmomente durch den Luftwiderstand, und bei einem Eiskunstläufer die Reibung der Schlittschuhe am Eis während einer Pirouette als unwesentlich weg, dann haben wir den Fall (2.7.2.18) vor uns.
r
Erfolgt die Drehung, die den konstanten Drehimpuls L( S ) ( 0 ) verursacht, noch dazu
r
um eine zum Drehimpuls parallele raumfeste Achse eDrehachse (was bei den genannten
Beispielen der Fall ist), dann lesen wir aus (2.7.2.16) die Gültigkeit von
r
r
Θ(t ; eDrehachse )ω (t ) = Θ(0; eDrehachse )ω (0)
(2.7.2.19)
ab. In Worten heißt dies, dass (bei Abwesenheit von äußeren Drehmomenten und
Zutreffen der übrigen genannten Bedingungen) eine Vergrößerung des Drehmomentes eine Verringerung der Winkelgeschwindigkeit zur Folge hat und umgekehrt.
Dieser Sachverhalt lässt sich einfach experimentell überprüfen: Wir setzen uns dazu
mit weit ausgestreckten Armen auf einen (kugelgelagerten) Drehstuhl, und lassen
uns von einem Helfer in zügige Rotation versetzen. Da wir die Reibung im Kugellager
des Stuhles und gegen die umgebende Luft außer Acht lassen, gilt (2.7.2.19): Ziehen
wir daher jetzt unsere Arme dicht an den Körper, so verkleinern wir unser Trägheitsmoment bezüglich der (vertikalen) Drehachse deutlich, und die Winkelgeschwindigkeit erhöht sich ebenso deutlich. Aus der Abb. 2.7.12 entnehmen wir, dass das Trägheitsmoment um eine senkrechte Achse mit ausgestreckten Armen zweimal größer
76
als jenes mit angezogenen Armen ist. Die Winkelgeschwindigkeit wird also zweimal
größer.
Abbildung 2.7.12: Experiment 1 am Drehstuhl
Die Veränderung des Trägheitsmomentes mit der Körperhaltung machen sich Turmspringer zu Nutze, indem sie ihre ausgeprägte Drehbewegung am Ende mehrerer
Salti durch einen letzten gestreckten Salto vor dem Eintauchen stark verlangsamen
(vgl. Abb. 2.7.10).
Der Drehstuhl erlaubt noch einen zweiten interessanten Versuch: Diesmal stellen wir
uns wieder mit ausgestreckten Armen auf den Stuhl. Nun modellieren wir unseren
Körper – zum Unterschied vom ersten Versuch - ohne die Arme als „Starren Körper“,
und rechnen die Arme zur Umgebung. Da auf den armlosen Körper (bei ruhig gehaltenen Armen) kein Drehmoment wirkt, und der Drehimpuls des armlosen Körpers
anfänglich Null ist, bleibt er es gemäß (2.7.2.18) so lange, bis ein Drehmoment einwirkt. Ein solches Drehmoment erzeugen wir durch ruckartiges Drehen unserer Arme
im Uhrzeigersinn, weil dann die „Umgebung“ (also hier unsere Arme) nach dem „3.
Newtonschen Axiom“ auf uns eine gleich große „Reaktionskraft“ gegen den Uhrzeigersinn ausübt. Bilden wir aus diesen beiden Kräften (je eine Kraft von jedem Arm)
die auf uns wirkenden Drehmomente durch „Kreuzmultiplikation“ mit den Kraftarmen
r
r
( r1 und r2 gehen hier von unserem Schwerpunkt im Bauchraum zu den beiden
Schultergelenken), dann finden wir aus der Drehimpulsgleichung (2.7.2.10), dass
sich unser Drehimpuls wie in Abb. 2.7.13 dargestellt verändern sollte. Tatsächlich
wird diese Vorhersage vom Experiment eindruckvoll bestätigt.
77
Abbildung 2.7.13: Experiment 2 am Drehstuhl
3. Anwendungen der Newtonschen Mechanik auf die
Biomechanik
3.1. Der „freie Fall“ ohne Luftwiderstand
Im ersten Beispiel möchten wir den Verlauf der Bewegung eines Sportlers, welcher
sich aus einer bestimmten Höhe h fallen lässt (beispielsweise ein Turmspringer vom
10 Meter Brett) voraussagen. Unabhängig davon, welche zusätzliche Bewegungen etwa Saltos - der Sportler dabei ausführt, interessieren wir uns nur für einen groben
Verlauf der Bahnkurve während des Fallens. Eine Modellierung des Sportlers als
Massenpunkt ist also angebracht, und wir wählen die Erdoberfläche als Inertialsystem. Weiters nehmen wir zunächst an, dass der Sportler senkrecht fällt. Dann ist
die Bahn eindimensional und wir benötigen zur Beschreibung lediglich eine Koordinate y( t ) mit dem Ursprung 0 am Erdboden (bzw. beim Turmspringer auf der Wasseroberfläche des Sprungbeckens).
78
Abbildung: 3.1.1
Nach dem Absprung wirkt auf den Sportler die zum Boden gerichtete Schwerkraft FG
und die nach oben gerichtete Luftwiderstandskraft FL , die das freie Fallen behindert.
Beschränken wir uns allerdings auf kleine Absprunghöhen, und folglich auf nicht zu
große Geschwindigkeiten des fallenden Körpers, so können wir diese Luftreibungskraft vernachlässigen. In der Biomechanik sprechen wir dann vom „freien Fall“, und
diesen wollen wir hier betrachten. Die „Gesamtkraft“ während des Fallens besteht
daher nur aus der Schwerkraft, Fges = FG . Wenn der Sportler aber mit der Wasseroberfläche oder mit dem Boden in Berührung kommt, dann kommt sehr rasch eine
weitere Kraft ins Spiel - die „Auflagekraft“ der Wasseroberfläche oder des Bodens.
Zur Beschreibung der Bewegung im Rahmen der Newtonschen Mechanik einigen wir
uns auf folgende Daten: Der Sportler wird als Massenpunkt mit der Masse m modelliert.
t Absprung = 0
Da wir uns nur für die Bewegung nach dem
„Absprung“ interessieren, starten wir unsere
Stoppuhr mit dem „Absprung“
y (0 ) = h
…
Die Position zum Zeitpunkt des Absprunges
ist h .
v( 0 ) = y& ( 0 ) = 0
Wir nehmen an, dass sich der Sportler
einfach Fallen lässt.
Fgesamt = − mg …
Abbildung 3.1.2
Zu jedem Zeitpunkt des Falles wirkt nur die
Gravitation, da wir den Luftwiderstand
vernachlässigen.
Damit lautet das „2. Newtonsche Axiom“:
79
maNewton ( t ) = m
d 2 y( t )
= −mg ,
dt 2
(3.1.1)
wobei wir nochmals daran erinnern, dass die Newtonsche Beschleunigung aNewton nur
deshalb d 2 y( t ) dt 2 ist, weil y( t ) ein inertiales Bezugssystem ist. Aus der zu (3.1.1)
äquivalenten Differentialgleichung &y&( t ) = − g erhalten wir durch eine Integration die
Geschwindigkeit
v(t ) = y& (t ) = C1 − gt
und durch eine weitere Integration die Bahnkurve
gt 2
y( t ) = C2 + C1t −
2
Da y( 0 ) = h und v( 0 ) = y& ( 0 ) = 0 sein sollen, müssen wir den Integrationskonstanten
die Werte C1 = 0 und C2 = h geben. Damit erhalten wir für die Geschwindigkeit endgültig
v( t ) = − gt ,
(3.1.2)
und für die Bahn
y( t ) = h −
gt 2
.
2
(3.1.3)
Interessiert uns, nach welcher Fallstrecke der Sportler welche Geschwindigkeit erreicht hat, so brauchen wir aus den beiden Beziehungen (3.1.2) und (3.1.3) die Zeit
zu eliminieren, mit dem Ergebnis
y( t ) = h −
v2( t )
, bzw. v( t ) = 2 g (h − y( t )) .
2g
(3.1.4)
80
Die Aufprallgeschwindigkeit am Boden, wo y( t Aufprall ) = 0 ist, ergibt sich aus der zweiten Form von (3.1.4) als v Aufprall = 2 gh .
Für den Sprung vom 10 Meter Turm ergibt dies ganz grob eine Aufprallgeschwindigkeit von 15 ms −1 . Für einen „Klippenspringer“ aus 30 Meter Höhe sind es bereits etwa 25 ms −1 . Bei diesen Geschwindigkeiten wird das Eintauchen bereits zum Problem, wie auch der Volksmund weiß: „Beim Eintauchen aus immer größerer Höhe wird
das Wasser immer härter!“ Die physikalische Begründung dieser Beobachtung lässt
sich wieder mit der Newtonschen Mechanik qualitativ richtig geben: Beim Eintauchen
verdrängt der Körper des Sportlers mindestens so viel Wasser wie sein eigenes Volumen. Das bedeutet, dass er beim Eintauchen einen Raum dieser Größe vom Wasser „frei räumen“ muss. Um (das zunächst ruhende) Wasser aber „aus dem Weg zu
räumen“, muss es zuerst beschleunigt werden. Diese Beschleunigung ist groß, weil
die Geschwindigkeit der betroffenen Wasserelemente in sehr kurzer Zeit von Null auf
2 gh gebracht werden muss. Das Produkt aus dieser Beschleunigung und der Masse des zu verdrängenden Wassers ist also die Kraft, die der Körper des Turmspringers ausüben muss, um sich einen „Eintauchkanal frei zu räumen“.
Bisher haben wir die zu verdrängenden Wasserelemente als herausgegriffenen Körper betrachtet, und den Turmspringer als „Umgebung“, die auf diesen Körper einwirkt. Nun betrachten wir den Turmspringer als Körper und das Wasser als Umgebung, das auf den Turmspringer durch Kräfte einwirkt. Nach dem „3. Newtonschen
Axiom“ sind diese Kräfte gleich groß, aber umgekehrt gerichtet wie die Kraft des
Turmspringers auf das Wasser. Da wir diese Kraft als ziemlich groß abgeschätzt haben, ist auch die Kraft des Wassers, mit der es dem Eintauchen entgegenwirkt, groß,
und wird mit der Eintauchgeschwindigkeit immer größer! Eine genauere Analyse des
Zustandekommens dieser Widerstandskraft führen wir in Abschnitt 3.2. für Luft durch.
Muss sich ein Körper den Weg durch Luft „frei kämpfen“ sind die Verhältnisse ziemlich ähnlich, wenn man die viel geringere Dichte der Luft im Vergleich zu Wasser berücksichtigt.
Was ändert sich an der Bahnkurve, wenn unser Sportler zwar wieder aus der Höhe
h, aber unter einem Winkel α zur Horizontalen mit der Geschwindigkeit v0 nach
81
„vorne oben“ springt? Die resultierende Bahnkurve ist dann zweidimensional, und die
zugehörigen Anfangsbedingungen lauten
x( 0 ) = 0 , x&( 0 ) = v0 cos α , y( 0 ) = h , und y& ( 0 ) = v0 sin α .
(3.1.5)
Das „2. Newtonsche Axiom“ umfasst in diesem Fall zwei Bewegungsgleichungen,
nämlich
m&x&( t ) = 0
(3.1.6)
für die horizontale x-Komponente, weil die Schwerkraft in dieser Richtung nicht wirkt,
und die Gleichung (3.1.1) für die vertikale y-Komponente,
m&y&( t ) = −mg
(3.1.1)
weil die Schwerkraft nach wie vor senkrecht nach unten wirkt.
Die Bahnkurve setzt sich aus der Lösung (3.1.4) von (3.1.1) und der Lösung von
(3.1.6) zusammen,
x( t ) = B2 + B1t .
(3.1.7)
Bestimmt man die Konstanten B1 , B2 ,C1 ,C2 so, dass die Anfangsbedingungen (3.1.5)
erfüllt sind, dann erhält die Lösung das Aussehen
x( t ) = v0t cos α
y( t ) = h + v0t sin α −
(3.1.8a)
gt 2
2
(3.1.8b)
Die Bahnkurve wird etwas übersichtlicher, wenn wir aus der „Parameterdarstellung“
(3.1.8a,b) den Bahnparameter t in der Darstellung von y zugunsten von x eliminieren. Dabei erhalten wir
82
y( x ) = h + x tanα −
gx 2
,
2
2v0 cos 2 α
(3.1.8c)
also eine Parabel in der x-y-Ebene. Natürlich erfüllt (3.1.8c) ebenfalls die Anfangsbedingungen (3.1.5), denn für x = 0 (den Wert von x beim Absprung) folgt y( x ) = h ,
und dy dx = y& ( 0 ) x&( 0 ) = tanα .
Die Darstellung (3.1.8c) eignet sich sehr gut zur Bestimmung der Sprungweite. Da
diese Größe bei einem Weitspringer interessanter ist, als bei einem Turmspringer,
wählen wir nun h = 0 (der Weitspringer springt vom Boden ab) und y( xSprungweite ) = 0
(der Weitspringer landet wieder am Boden). Dann ergibt sich aus (3.1.8c) für die
Sprungweite die Beziehung
0 = xSprungweite tan α −
2
gxSprungweit
e
2v0 cos 2 α
2
,
oder nach Division durch xSprungweite (was wegen xSprungweite ≠ 0 erlaubt ist) und Verwendung von 2 sin α cos α = sin 2α ,
v0 sin 2α
,
g
2
xSprungweite =
die für α = 45° maximal wird.´
3.2. Freier Fall mit Luftwiderstand
Beim Fallschirmspringen sind die durchfallenen Distanzen viel größer als beim Turmoder Weitspringen, und der Luftwiderstand ist nicht mehr vernachlässigbar. Schnelle
Körper erfahren in Luft eine sehr starke Bremskraft, was wir bemerken, wenn wir eine
Hand aus dem Autofenster strecken: Während wir im langsamen Stadtverkehr wenig
spüren, können wir auf der Autobahn unsere Hand kaum ruhig halten. Deshalb müssen wir diese Kraft in die Formulierung des „2. Newtonschen Axioms“ für einen Fall-
83
schirmspringer, einen Abfahrer, ein Formel-1-Auto aufnehmen, und deshalb müssen
wir uns nun um eine geeignete Modellierung kümmern.
Abbildung 3.2.1: Luftwiderstand eines Formel-1-Autos
Dazu betrachten wir Luft als Ansammlung von Luftmolekülen. Ganz analog dem Vorgang des Eintauchens eines Turmspringers in Wasser in Abschnitt 3.1, muss ein
durch Luft bewegter Körper ständig Luftmoleküle „beiseite schieben“. Dazu ist eine
Kraft des bewegten Körpers auf die Luftmoleküle erforderlich, die wir folgendermaßen abschätzen können. Wird ein einzelnes ruhendes Luftmolekül der Masse µ von
dem mit der Geschwindigkeit v heranfliegenden Körper der sehr viel größeren Masse
M zentral gestoßen, so ändert sich seine Geschwindigkeit von Null auf 2v. „Zentral“
heißt hier, dass die stoßende Fläche genau senkrecht zur Geschwindigkeit v des
Körpers gerichtet ist.
Nach dem „2. Newtonschen Axiom“ bedeutet dies
FEinzelstoß = µ
dvLuftteilchen
dt
=µ
nach Stoß
vor Stoß
vLuftteilch
en − vLuftteilchen
∆ tStoßdauer
=µ
2vKörper − 0
∆ tStoßdauer
=
2 µ vKörper
∆ tStoßdauer
. (3.2.1)
In dieser Zeit ( ∆ tStoßdauer ) stößt der Körper aber nicht auf ein Luftmolekül, sondern auf
alle, die sich in jenem Volumen befinden, das der Körper bei seiner Bewegung in
dieser Zeit „durchpflügt“. Dieses Volumen ist das Produkt aus seiner Querschnittsfläche
A
und
der
in
der
Zeit
∆ tStoßdauer
zurückgelegten
Wegstrecke,
also
84
∆ V = AvKörper ∆ tStoßdauer . Befinden im Einheitsvolumen N Luftmoleküle, so ist die Zahl
der Luftmoleküle in ∆ V gleich NAvKörper ∆ tStoßdauer . Mit dieser Zahl müssen wir (3.2.1)
multiplizieren, um die Gesamtkraft, nämlich die Luftwiderstandskraft, zu erhalten
Fgesamt = FL =
2 µ vKörper
∆ t Stoßdauer
2
NA vKörper ∆ t Stoßdauer = 2 ρ AvKörper
.
(3.2.2)
In der Ableitung von (3.2.2) machten wir die Annahme, dass der unser Körper eine
Frontfläche senkrecht zu seiner Geschwindigkeit besitzt, so dass alle Luftmoleküle
zentral gestoßen werden. Nur dann ergibt sich in (3.2.2) der Faktor Zwei. In der Realität „stoßen“ jedoch ganz verschieden geformte Frontflächen auf die Luftmoleküle,
und auch andere Effekte spielen eine Rolle. Daher muss der Faktor Zwei durch eine
kleinere Zahl ersetzt werden, die man den „Luftwiderstandsbeiwert“ cW 2 nennt, und
für verschiedene Körperformen experimentell unter genormten Bedingungen bestimmt. Aus der folgenden Grafik können wir einige Zahlenwerte entnehmen, aus
denen der bekannte Sachverhalt ersichtlich ist, dass „stromlinienförmige“ Körper einen geringen Luftwiderstandsbeiwert haben. Solche Körperformen werden nicht
ganz passend als „aerodynamisch“ bezeichnet.
Abbildung 3.2.2: Luftwiderstandsbeiwerte
cW für verschiedene Formen
85
Der Luftwiderstand wird also endgültig von uns in der Form
FL =
1
cW Aρ v 2
2
(3.2.3)
modelliert, wobei wir die Geschwindigkeit des Körpers wieder als v ohne Index „Kör-
per“ geschrieben haben.
Wegen der quadratischen Abhängigkeit von v ist der Luftwiderstand vor allem bei
hohen Geschwindigkeiten sehr wichtig. Im Sport spielt er in vielen Bereichen eine
wesentliche Rolle. Denken wir nur an die Formel 1, wo riesige Summen in die Entwicklung „aerodynamischer“ Autos fließen. Die Dichte der Luft ist wohl kaum zu beeinflussen, und so für alle Sportler bei einem Rennen gleich. Aus diesem Grund konzentrieren sich viele Betreuer von Sportlern darauf, die Position (= Form) oder die
„schädliche Fläche“ A so klein wie möglich zu machen. Tests der österreichischen
Skinationalmannschaft im Windkanal sind bereits ein fester Bestandteil der Vorbereitung auf die Wettkampfsaison geworden. Die daraus gefundene etwas verbesserte
Abfahrtshocke ist allerdings nur einer der vielen Gründe für die derzeitige Dominanz
Österreichs in dieser Sportart.
Als Beispiel betrachten wir einen Fallschirmspringer, den wir wieder als Massenpunkt
modellieren. Wir nehmen an, dass er – relativ zu unserem mit der Erde verbundenen
Inertialsystem – senkrecht aus einer Höhe H zu fallen beginnt. Dann genügt zur Beschreibung der Bahnkurve eine Koordinate y( t ). Das „2. Newtonsche Axiom“ lautet
dann
m
dv( t )
1
= − mg + cWohne Fallschirm ρ Av 2 ,
dt
2
oder, wenn wir die Konstante in der Luftwiderstandskraft mit mk0 abkürzen,
dv( t )
= − g + k0 v 2 ,
dt
(3.2.4a)
mit den Anfangsbedingungen
86
y( 0 ) = H , v( 0 ) = 0 .
(3.2.4b)
Zur Abwechslung wurde in (3.2.4.a) die Beschleunigung als Ableitung der Geschwindigkeit nach der Zeit geschrieben, a( t ) = dv( t ) dt = d 2 y( t ) dt 2 .
Mit Hilfe der Theorie der Differentialgleichungen könnten wir aus (3.2.4a,b) die Bahnkurve in Abhängigkeit von der Zeit berechnen. Doch ist die nach einer gewissen Zeit
durchfallene Strecke für uns nicht so interessant wie die nach einer gewissen
Fallstrecke erreichte Fallgeschwindigkeit. Das heißt, dass wir am Zusammenhang
v( y ) interessiert sind. Der lässt sich aber aus (3.2.4a,b) leicht gewinnen. Zunächst
erhalten wir aus der „Kettenregel“
dy (t ) dy (t ) dv(t )
=
.
dt
dv dt
(3.2.5)
Die linke Seite von (3.2.5) ist v , und dv(t ) dt ist durch (3.2.4a) gegeben. Daher lässt
sich (3.2.5) umschreiben in
dy
v
1 − 2k0 v
1 d
=−
=
=
ln g − k0v 2 ,
2
2
dv
g − k0 v
2k0 g − k0 v
2k0 dv
(
)
woraus wir durch Integration
y (v ) =
(
)
1
ln g − k0v 2 + C
2k0
(3.2.6)
erhalten. Damit y (0) = H ist, wie es die Anfangsbedingungen (3.2.4b) verlangen,
muss die Integrationskonstante C in (3.2.6) zu
C=H−
1
ln ( g )
2k0
gewählt werden. Setzen wir dies in (3.2.6) ein, so erhalten wir die Umkehrfunktion
des gesuchten Zusammenhanges v( y ) , nämlich,
87
y (v ) = H +
1 g − k0 v 2
.
ln
2k0
g
(3.2.7)
(3.2.7) lässt sich jedoch elementar umkehren, mit dem Ergebnis
v( y ) =
(
g
1 − e2k0 ( y − H )
k0
)
(3.2.8)
Dieser Zusammenhang besagt, dass bei kleiner werdendem y , was einer größer
werdende Fallstrecke äquivalent ist, die Exponentialfunktion rasch klein wird, so dass
sich die Geschwindigkeit rasch der Grenzgeschwindigkeit
vGrenz =
g
=
k0
2mg
Aρ c
ohne Fallschirm
W
,
(3.2.9)
nähert, für die wir bei Annahme der Werte m=80 kg, g=9,81 m/s², cW =0,34 (Halbkugel
auf der runden Seite angeströmt), A=1 m² und ρ =1,2929 kg/m³ eine realistischen
Wert für die Grenzgeschwindigkeit von 59,8 m/s bzw. 215,3 km/h erhalten.
Falls wir nur an der Grenzgeschwindigkeit interessiert wären, hätten wir diese natürlich direkt aus (3.2.4a) entnehmen können; denn bei der erreichen der Grenzgeschwindigkeit ist die Beschleunigung Null geworden, und (3.2.4a) reduziert sich auf
0 = − g + k0v 2 , woraus unmittelbar (3.2.9) folgt.
88
3.3. Der Vorteil schwerer Abfahrer in Gleitstücken
Im alpinen Ski-Weltcup bringen Abfahrer meist wesentlich mehr Körpermasse auf die
Waage als etwa reine Slalomläufer. Auch bei Fernsehübertragungen zeigt sich an
den „Zwischenzeiten“ oft, dass etwas schwerere Athleten speziell in Gleitpassagen
ihren Konkurrenten trotz gleicher Skimarke und damit gleicher Präparation etwas Zeit
abnehmen können. Im Rahmen der Newtonschen Mechanik lässt sich einfach verstehen, worin der leichte Vorteil von schweren Abfahrern in Gleitpassagen besteht.
Da uns hier wieder nur der grobe Verlauf der Bewegung interessiert, modellieren wir
den Abfahrer als Massenpunkt. Als Inertialsystem wählen wir die Abfahrtstrecke und
wir legen unserer Betrachtung ein zweidimensionales Koordinatensystem zu Grunde,
wie in Abb. 3.3.1, mit α als dem Neigungswinkel des Hanges.
Abbildung 3.3.1: Fritz Strobl (AUT)
Welche wesentlichen Einflüsse wirken auf unseren Abfahrer? Wenn wir Windstille
r
annehmen, dann wirkt auf den Sportler einmal die Schwerkraft FG , weiters die Auflar
gekraft FA der Schneedecke, die die Normalkomponente der Schwerkraft kompensiert - sonst würde der Sportler ja entlang der Erdanziehungskraft fallen! Durch die
89
r
hohe Geschwindigkeit bei Gleitpassagen können wir den Luftwiderstand FL nicht
r
außer Acht lassen, und die Gleitreibung FR zwischen Ski und Schnee stellt eine wei-
tere wesentliche Einwirkung dar – sonst würden sich die „Serviceleute“ nicht so viel
Mühe mit deren Herabsetzung geben! Wir erhalten also die Gesamtkraft
r
r
r
r
v
Fgesamt = FG + FA + FL + FR .
Mit den bewährten Modellierungen für diese Kräfte lautet das „2. Newtonsche Axiom“
– die Newtonsche Bewegungsgleichung:
1
ax ( t ) mg cos( α )
0
− cW Aρv 2 − mg sin( α )µ g
=
+
+
m
+
− mg sin( α ) mg sin( α ) 2
a
(
t
)
0
y
0
oder zusammengefasst
1
a x ( t ) mg cos( α ) − cW Aρv 2 − mg sin( α )µ g
=
m
2
.
a y ( t )
0
Auf der rechten Seite der x-Komponente der Beschleunigung,
ax (t ) = g[cos(α ) − sin(α ) µ g ] −
cW ρ v 2 A
,
2 m
(3.3.1)
ist der erste Term für Abfahrer aller Massen gleich, der zweite jedoch nicht, denn er
enthält den Quotienten aus „schädlicher“ Querschnittsfläche und Masse. Betrachten
wir als Vorbereitung diesen Quotienten für eine Kugel vom Radius R und der Dichte
ρ . Hier ist die Querschnittsfläche A = R 2π und die Masse m = 4 R 3πρ 3 . Die Querschnittsfläche durch die Masse ist dann A / m = 3 /( 4 Rρ ) , ein Quotient, der bei
gleichbleibender Dichte umso kleiner wird, je größer der Radius R wird. Ganz ähnlich
verhält es sich mit einem Abfahrer: Die „schädliche“ Querschnittsfläche der Abfahrtshocke eines Abfahrers wird nicht proportional zu seiner Masse größer. Deshalb reduziert sich für einen schweren Sportler der zweite Term in der Beschleunigung
90
(3.3.1), wodurch die Beschleunigung gegenüber einem leichteren Kontrahenten etwas größer wird. Die „saloppe“ Redeweise unter Skirennläufern, dass „Masse läuft“,
hat somit auch physikalisch gesehen ihre Berechtigung, und weist nachdrücklich
darauf hin, dass die Modellierung der Bahnkurve eines Abfahrtsläufers ohne Luftwiderstand unrealistisch wäre. Der Luftwiderstand ist im Abfahrtslauf im Sinne der
Newtonschen Mechanik eben eine wesentlicher Einfluss der Umgebung.
3.4. Der Stabhochsprung
Als Nächstes wollen wir den Stabhochsprung aus dem Blickwinkel der Newtonschen
Mechanik etwas genauer unter die Lupe nehmen. Der Stabhochspringer versucht,
die beim Anlauf erzielte Geschwindigkeit möglichst effektiv über die Biegeelastizität
des Stabes in einen Gewinn an Höhe umzuwandeln. Diese Biegeelastizität des Stabes stellt zwar für die „Theoretische Mechanik“ kein Problem dar, kann aber mit unserem „mechanischen Repertoire“ nicht beschrieben werden. Deshalb ersetzen wir
den realen Stab durch einen gedachten Modellstab, der einerseits die wesentliche
Rolle des Stabes beim Stabhochsprung simuliert, andererseits aber mit unseren bisher kennen gelernten Modellierungen einfach beschrieben werden kann.
Dieser Ersatzstab ist in den Abbildungen 3.4.1 – 3.4.4 schematisch dargestellt. Wir
denken ihn uns aus zwei verschiebbar ineinander gesteckten (masselosen) Hülsen
gefertigt, die einer genügend kräftigen Spiralfeder in ihrem Inneren ausreichend Seitenstabilität geben. Diese Feder modellieren wir mit einer entspannten Länge L (d. h.
wenn nichts auf die Feder drückt, hat sie die Länge L), und einer Federkonstanten k.
Zur Anwendung der Newtonschen Mechanik modellieren wir den Stabhochspringer
wieder als Massenpunkt, auf den je nach Sprungphase verschiedene Kräfte wirken.
Die erste Phase beginnt für uns am Ende des Anlaufes, den der Sportler etwa bei x0
begonnen hat, und bei dem er auf den Ursprung zu gelaufen ist. Unsere erste Phase
beginnt mit dem „Einstechen“ des Stabes, wenn die bisher entspannte Spiralfeder
gestaucht zu werden beginnt. Der Stab ist in dieser Phase horizontal und wir benötigen zur Beschreibung der Bahn des Sportlers nur die Koordinate x( t ) . Es wirken
91
zwar auf den Stabhochspringer auch die vertikale Schwerkraft; diese wird jedoch
durch die ebenso vertikale Stützkraft der Anlaufbahn kompensiert.
Die Kraft der Spiralfeder auf den Sportler wirkt entlang der (horizontalen) x-Richtung,
und ist durch FSpiralfeder = k (L − x( t )) gegeben. Dieser Ausdruck ist positiv für alle
x( t ) < L , d. h. die Federkraft wirkt in positiver x-Richtung, also dem anstürmenden
Stabhochspringer entgegen, wie es sein soll. Und diese Kraft ist für x( t ) = L Null,
wenn die Stauchung gerade beginnt.
Abbildung 3.4.1
Das „2.Newtonsche Axiom“ für den Sportler lautet in dieser Phase:
m&x&( t ) = k (L − x(t)) ,
(3.4.1a)
mit den Anfangsbedingungen
x( 0 ) = L , x&( 0 ) = v Anlauf .
(3.4.1b)
Wir wollen aus der Gleichung (3.4.1a) unter Beachtung der Anfangsbedingungen
(3.4.1b) die bei der vorgegebenen Anlaufgeschwindigkeit v Anlauf maximal erzielbare
Stauchung xmax berechnen. Dazu bedenken wir, dass im Moment der maximalen
Stauchung der Feder die gesamte Anlaufgeschwindigkeit „aufgebraucht“ ist, also
x& max imale Stauchung = 0 gilt. Wir benötigen also einen Zusammenhang zwischen x&( t ) und
x( t ) .
92
Um einen solchen aus (3.4.1a) zu erhalten, multiplizieren wir diese Gleichung mit
x&( t ) , worauf sie als eine Zeitableitung geschrieben werden kann:
(
d mx& 2 (t ) k x 2 − 2 Lx + L2
+
2
dt 2
) = 0 .
(3.4.2)
Dabei haben wir ohne Beschränkung der Allgemeinheit eine Konstante kL2 2 hinzugefügt, weil dies einerseits bequem ist und weil diese Konstante andererseits bei der
Ableitung ohnehin verschwindet. Die Gleichung (3.4.2) kann nun sofort integriert
werden, mit dem Ergebnis
x& 2 ( t ) +
k
2
(L − x )2 = vAnlauf
m
(3.4.3)
wobei wir die ganze Gleichung bereits mit 2 / m multipliziert und der Integrationskonstanten den Wert gegeben haben, den sie nach den Anfangsbedingungen haben
muss.
Aus (3.4.3) erhalten wir nun sofort die maximale Stauchung
k
2
(L − xmax )2 = v Anlauf
.
m
(3.4.4)
Dieser Augenblick der maximalen Stauchung des Sprungstabes ist in Abb. 3.4.2 angedeutet.
Abbildung 3.4.2
93
Nun setzt eine Zwischenphase ein, für die wir annehmen, dass der Stabhochspringer
seinen Stab sehr schnell senkrecht stellt, und mit einem Sprung seinen Schwerpunkt
in die Höhe y = xmax bringt. Diese Zwischenphase ist in Abb. 3.2.3 schematisch dargestellt.
Abbildung 3.4.3
Nun beginnt die zweite Phase. Die Bahnkurve für den weiterhin als Massenpunkt
modellierten Stabhochspringer nehmen wir nun näherungsweise längs der y-Achse
an. Wir beschreiben sie durch eine Funktion y( t ) . In der Vertikalbewegung wirken
auf den Stabhochspringer zwei Kräfte, die Federkraft nach oben und die Schwerkraft
nach unten. Das „2. Newtonsche Axiom“ lautet daher
m&y&( t ) = − mg + k (L − y(t)) ,
(3.4.5a)
mit den Anfangsbedingungen
y( 0 ) = xmax , y& ( 0 ) = 0 .
(3.4.5b)
Wir wollen aus der Gleichung (3.4.5a) unter Beachtung der Anfangsbedingungen
(3.4.5b) die Geschwindigkeit des Stabhochspringers zu dem Zeitpunkt bestimmen,
zu dem die Feder wieder ihre Ruhelänge L erreicht hat. Wir nehmen an, dass die
Feder nicht über diese Länge hinaus expandieren kann, weil sie durch eine Arretierung der beiden „Stabhülsen“, die in dieser Position einrastet, daran gehindert wird.
Wir benötigen also wieder einen Zusammenhang zwischen y& ( t ) und y( t ) .
94
Nach dem Vorbild unserer Vorgangsweise in Phase I multiplizieren wir die Gleichung
(3.4.5a) mit y& ( t ) , worauf auch sie als eine Zeitableitung geschrieben werden kann:
2
d my& 2 ( t ) k (L − y )
+
+ mgy( t ) = 0 .
dt 2
2
(3.4.6)
Dabei haben wir mit der gleichen Begründung wie in Phase I wieder eine Konstante
kL2 2 hinzugefügt. Die Gleichung (3.4.6) kann nun sofort integriert werden, mit dem
Ergebnis
y& 2 ( t ) +
k
(L − y )2 + 2 gy = k (L − xmax )2 + 2 gxmax
m
m
(3.4.7)
wobei wir die ganze Gleichung bereits mit 2 / m multipliziert, und der Integrationskonstanten den Wert gegeben haben, den sie nach den Anfangsbedingungen haben
muss.
Die Geschwindigkeit in dem Zeitpunkt, in dem y = L wird, erhalten wir aus (3.4.7) zu
2
y& L ( t ) =
k
(L − xmax )2 − 2 g (L − xmax )
m
(3.4.8)
Nun folgt noch die Phase III: Der Stab hat seine Schuldigkeit getan, die erreichte
senkrechte Geschwindigkeit
y& L ( t ) trägt den Stabhochspringer aber noch etwas
höher (vgl. Abb. 3.4.4).
Abbildung 3.4.4
95
Da nun keine Federkraft mehr am Werke ist, lautet das „2. Newtonsche Axiom“ einfach
m&y&( t ) = − mg ,
(3.4.9a)
mit den Anfangsbedingungen
y( 0 ) = L , y& ( 0 ) = y& L .
(3.4.9b)
In Phase III wollen wir aus der Gleichung (3.4.9a) unter Beachtung der Anfangsbedingungen (3.4.9b) jene Höhe y = H berechnen, bei der die Geschwindigkeit des
Stabhochspringers Null geworden ist. Dies ist der Augenblick, an dem er beginnt,
zum Boden zurück zu fallen. H ist also die maximal erreichbare Höhe des Schwerpunktes des Stabhochspringers in der vorgenommenen Modellierung.
Die nun schon zur Routine gewordene Multiplikation der Gleichung (3.4.9a) mit y& ( t )
liefert
d my& 2 ( t )
+ mgy( t ) = 0
dt 2
und weiter
y& 2 ( t ) + 2 gy = y& L2 + 2 gL ,
(3.4.10)
wobei der Integrationskonstanten wieder der den Anfangsbedingungen (3.4.9b) entsprechende Wert gegeben wurde. Daraus lesen wir ab, dass
H=
y& L2
+L
2g
(3.4.11)
ist. Da uns jedoch interessiert, wie die Anlaufgeschwindigkeit die erreichbare Höhe H
beeinflusst, setzen wir in (3.4.11) noch den Wert von y& L2 aus (3.4.8) ein,
96
H=
k
(L − xmax )2 + xmax .
2 mg
Und nun bringen wir noch über (3.4.4) die Anlaufgeschwindigkeit ins Spiel, mit dem
Endergebnis
H=
2
v Anlauf
2g
+ xmax .
(3.4.12)
Die maximale Höhe hängt also wesentlich von der Anlaufgeschwindigkeit ab. Dazu
kommt jene Höhe xmax , von der wir in unserem Modell annahmen, dass der Stabhochspringer seinen Schwerpunkt am Beginn der Phase II durch einen Sprung in
diese Höhe bringt. Hat der Sportler beim Absprung die Geschwindigkeit v Anlauf , so ist
er durch eine perfekte Übertragung der Bewegung durch den Stab in der Lage, seinen Körperschwerpunkt auf die Höhe H zu heben.
Abbildung 3.4.5: Körperschwerpunkt beim Absprung bzw. Überqueren der Latte einer Stabhochspringerin.
Da der Weltrekord im 100m Lauf knapp unter 10 Sekunden liegt, können wir davon
ausgehen, dass ein Stabhochspringer (da er ja noch den Stab mitschleppen muss)
beim Absprung nicht schneller als 10 m/s sein wird. Daraus erhalten wir eine theoretisch mögliche Hebung des Körperschwerpunktes um H = 5,1 m + xmax (mit der obigen
Bedeutung von xmax ). Da sich der Körperschwerpunkt circa 1 Meter vom Boden entfernt befindet und der Körperschwerpunkt durch eine geschickte Position beim Überqueren der Latte etwas unterhalb dieser verläuft, können wir eine maximale Sprung97
höhe von circa 6,5 m erwarten. In der Tat liegt derzeit der Weltrekord bei 6,15 m (aufgestellt von Sergey Bubka (UKR)) und durch Material- und Technikverbesserungen
werden wir uns der 6,5 m Marke sicher noch etwas nähern, diese allerdings aufgrund
physikalischer Überlegungen nur schwer überbieten können. Die Anlaufgeschwindigkeit bei Stabhochspringern liegt etwas unter 10 m/s, durch Abstoßen vom Stab knapp
vor dem Umkehrpunkt wird diese kleinere Anlaufgeschwindigkeit jedoch kompensiert.
3.5. Weshalb „rudern“ Abfahrer bei Geländesprüngen oft mit den
Armen?
Die Abfahrt ist wohl die spektakulärste Disziplin des alpinen Ski Weltcups. Vor allem
die hohen Geschwindigkeiten mit weiten Sprüngen fesseln das Publikum. Solange
der Sportler keine Fehler begeht, können auch bei Geschwindigkeiten von über
120 km h perfekt „gezogene“ Schwünge gefahren, und Sprünge bis zu 60 Meter
problemlos gestanden werden. Begeht ein Fahrer jedoch einen Fehler, so werden
die auftretenden enormen Kräfte sichtbar, und es kann zu schwersten Verletzungen
kommen.
Eine große Herausforderung für die Athleten stellen weite Sprünge dar. Dabei besteht ein Risiko darin, durch einen vorangegangenen Fahrfehler etwas in Rück- oder
Vorlage abzuspringen. Dabei wird in den Sprung ein Drehimpuls mitgenommen, der
eine Drehung um eine horizontale Körperachse nach „hinten“ oder „vorne“ bewirkt.
Befindet sich der Läufer einmal in der Luft, kann zwar der Luftwiderstand in Form von
„Unterluft“ oder „Oberluft“ ein Drehmoment bewirken. Dieses wirkt aber fast nie
dämpfend auf die beim Absprung mitgenommene Drehbewegung ein, sondern verschärft im Gegenteil die heikle Lage fast immer. Durch dieses Drehen landet der
Läufer dann mit Rück- oder Vorlage, und kann deshalb den Sprung oftmals nicht
mehr stehen.
Ein typisches, meist unbewusstes, Verhalten des Sportlers in einer solchen Situation
ist ein Rudern mit den Armen. Hat er durch den verpatzten Absprung eine Drehung
nach „hinten“ erhalten, dann rotiert er mit den Armen nach „hinten“. Wie bei unserer
98
Diskussion des Drehstuhls wirken die Arme mit der Kraft auf den Rest des sich drehenden Körpers zurück, mit denen sie „gerudert“ werden. Das Rudern mit den Armen
nach hinten erzeugt daher ein Drehmoment auf den Rest des Körpers, das den Anfangsdrehimpuls zu neutralisieren versucht.
Abbildung 3.5.1: Bode Miller (USA) bei einem seiner „perfekten“ Sprünge.
Hat der Sportler allerdings eine zu starke Vorlage beim Sprung, so kann er durch ein
Rotieren der Arme nach „vorne“ aufgrund desselben Prinzips, eine leichte Drehung
des „restlichen“ Körpers nach „hinten“ bewirken. In beiden Fällen kann er den Aufsprungwinkel so etwas verbessern.
Eine zusätzliche Möglichkeit, die Bewegung zu steuern, besteht für den bedrängten
Abfahrer in einer Streckung des Körpers. Durch die Streckung des Körpers vergrößert er sein Trägheitsmoment bezüglich der Drehachse beim verpatzten Sprung, und
kann so die Winkelgeschwindigkeit etwas verlangsamen. Durch dieses Verlangsamen wird er sich bis zum Aufsprung um einiges weniger weit drehen und hat somit
bessere Chancen, den Sprung sicher zu landen.
Diese Vorgehensweise können wir bei allen in Bedrängnis geratenen Abfahrern beobachten. Auf die Frage, in welche Richtung sie die Arme bei einer Vor- oder Rücklage rotieren, geben die meisten allerdings die verkehrte Antwort, obwohl sie in der
gefährlichen Situation unbewusst richtig gehandelt haben.
99
3.6. Die Innenlage beim Short Track
In diesem Beispiel wollen wir die extreme Innenlage eines Short Track Läufers beim
Durchfahren einer Kurve im Rahmen der Newtonschen Mechanik verstehen. Platzsprecher und TV-Kommentatoren bei solchen Sportveranstaltungen behaupten immer wieder, dass diese Innenlagen auf Grund der enormen „Fliehkräfte“ zustande
kommen. „Fliehkräfte“ werden ja in allen Sportarten vermutet, bei denen der Sportler
beim Durchfahren einer Kurve eine Innenlage einnimmt (z.B.: Alpiner Skirennlauf,
Motorradsport,…). Nun gibt es aber in der Newtonschen Mechanik keine Fliehkraft –
alle Kräfte können auf Einflüsse der Umgebung auf den sich bewegenden Körper
gedeutet werden. Deshalb kommt die Newtonschen Mechanik bei ihrer Erklärung der
Innenlage selbstverständlich ohne Fliehkraft aus.
Sehen wir uns im Rahmen der Newtonschen Mechanik also zuerst einmal nach einer
passenden Modellierung eines Short Track Läufers beim Durchlaufen einer Kurve
um: Da wir den Neigungswinkel des Sportlers zum Kurvenmittelpunkt hin erklären
wollen, ist eine Modellierung des Sportlers als Massenpunkt nicht zielführend. Ein
Massenpunkt kann ja keinen bestimmten Winkel zur Bahn einnehmen. Wir müssen
den Sportler also zumindest als „Starren Körper“ modellieren. Im Abschnitt 2.9. haben wir, aufbauend auf der Newtonschen Massenpunkt-Mechanik zur Beschreibung
eines „Starren Körpers“ zwei Bewegungsgleichungen erhalten. Die eine beschreibt
den Bahnverlauf des Körperschwerpunktes, die zweite Gleichung die Drehbewegung
des Körpers um den Schwerpunkt.
Um die einfachste Situation zu wählen, die aber noch alle uns interessierenden Aspekte des realen Problems zeigt, modellieren wir den Short Track Läufer als einen
homogenen Stab der Länge 2 s , der mit der Winkelgeschwindigkeit ω auf dem Mantel eines Kegelstumpfes herumläuft. Der Schwerpunkt liegt dann im Abstand s vom
Fußpunkt des Stabes (von den Schlittschuhkufen des Läufers) entfernt, und beschreibt eine exakte Kreisbahn mit dem Radius R . Das zur Beschreibung nötige Inertialsystem verankern wir in der Eisfläche, wie in Abb. 3.6.1 angedeutet.
100
Abbildung 3.6.1: Short Track Läufer in der Kurve
Als Erstes befassen wir uns mit der Schwerpunktsgleichung aus Abschnitt 2.9, die in
r
Worten ja lautete, dass die Bahn des Schwerpunktes s ( t ) so verläuft, als würden
alle Kräfte, unabhängig von ihren tatsächlichen Angriffspunkten am realen Körper, an
ihm angreifen. An solchen Kräften (bewirkt durch Einflüsse der Umgebung!) entnehr
men wir aus der Abb. 3.6.1 im Wesentlichen drei: Einmal die Schwerkraft FG in Richr
tung − ez (also senkrecht nach unten) mit dem Schwerpunkt als Angriffspunkt. Dann
r
r
die Auflagekraft FA der Eisfläche in Richtung von ez (also senkrecht nach oben) mit
r
der Schlittschuhkufe als Angriffspunkt. Und schließlich eine Haltekraft des Eises FR
r
in Richtung − er (also radial nach innen) mit der Schlittschuhschneide als Angriffsr
punkt. Weiters wirkt noch eine kleine Reibungskraft in Richtung von − eϕ (also entgegen der Geschwindigkeitsrichtung), welche allerdings in dieser Betrachtung nur eine
vernachlässigbare Rolle spielt.
Da wir angenommen haben, dass der Schwerpunkt eine Kreisbahn mit dem Radius
R beschreibt, wissen wir von Seite 42, dass die Beschleunigung auf einer solchen
101
r
r
Kreisbahn a Newton = −ω 2 Rer ist. Ist die Gesamtmasse des Stabes noch M ges , dann
r
r
r
r
lautet die Schwerpunktsgleichung M ges aNewton = FG + FA + FR , oder ausgeschrieben,
r
r
r
r
− M gesω 2 Rer = − M ges gez + FAez − FR er .
(3.6.1)
r
r
Daraus entnehmen wir unmittelbar die Darstellungen für FA und FR , nämlich
r
r
r
r
FA = M ges gez und FR = − M gesω 2 Rer .
(3.6.2)
Mit der Lieferung dieser Darstellungen für die Auflage- und die Haltekraft hat die
Schwerpunktsgleichung ihre Schuldigkeit getan. Und gemäß unserer obigen Argumentation hat die „massenpunktartige“ Schwerpunktsgleichung keinerlei Winkel α
ins Spiel gebracht. Dies muss nun die zweite Bewegungsgleichung des „Starren Körpers“ tun, die Drehimpulsgleichung
r
dL( S ) r ( S ) r ( S )
= DA + DR ,
dt
(3.6.3)
auf deren rechter Seite nur die von der Auflagekraft und von der Haltekraft relativ
zum Schwerpunkt erzeugten Drehmomente stehen – wir haben uns ja auf Seite 71
überlegt, dass die Schwerkraft relativ zum Schwerpunkt kein Drehmoment erzeugt..
Da sowohl die Auflage- als auch die Haltekraft an den Schlittschuhkufen angreifen,
r
ist der Kraftarm für beide − s , so dass mit (3.6.2) das gesamte Drehmoment
r( S )
r
r
r
Dges
= − s × (M ges gez − M gesω 2 Rer )
(3.6.4)
r
r
r
lautet. Durch die Winkel zwischen s und ez bzw. er taucht nun endlich der gesuchte
Neigungswinkel α auf. Um ihn aus der Drehimpulsgleichung berechnen zu können,
müssen wir zuerst die zeitliche Änderungsrate des Drehimpulses auf der linken Seite
von (3.6.3) berechnen.
102
Diese Berechnung stützen wir natürlich auf unsere allgemeine Formel (2.7.2.14) aus
Abschnitt 2.7,
[
]
r
r
r r2
r
r
r
L( S ) = ∑ L(i S ) = ∑ ∆mi ω (t )ri (t ) − ri (t )(ω (t ) ⋅ ri (t ) ) .
i
(2.7.2.14)
i
r
r
In unserem Falle ist ω = ω ez ,
r
s , σ als Länge des Vektors
r
r
r
ri = σ es , mit es als dem Einheitsvektor in Richtung von
r
ri und ∆ mi = qµ dσ , mit dem Stabquerschnitt q und
der Stabdichte µ . Wenn wir noch statt der Summe ein Integral schreiben ( ∆ mi lassen wir immer kleiner werden), dann ist der gesuchte Drehimpuls durch den Ausdruck
+s
+s
r
rr r r r
r r
r r
2s3
L( S ) = ∫ dσµωσ 2 q ez es2 − es ( ez ⋅ es ) = ωµq(ez − es cos α ) ∫ σ 2 dσ = ωµq (ez − es cos α )
3
−s
−s
(
)
gegeben, was sich durch Einführung der Gesamtmasse, M ges = 2 sqµ , zu
r( S ) M gesω s 2 r r
(ez − es cos α )
L =
3
(3.6.6)
r
Die einzige zeitabhängige Größe in (3.6.6) ist der Einheitsvektor es ( t ) , der sich mit
dem Stab ja mitdreht. Dadurch ändert sich die Richtung des Drehimpulses im Laufe
der Zeit, obwohl sein Betrag zeitlich gleich groß bleibt (was bei Betrachtung der angenommenen Bewegung auch plausibel ist),
r
M ω s 2 sin α
,
L( S ) = ges
3
wobei wir
(erz − ers cosα )2
r r
= 1 − 2 cos α ez ⋅ es + cos 2 α = 1 − cos 2 α = sinα verwendet
haben.
In der Drehimpulsgleichung benötigen wir jedoch die zeitliche Ableitung des Drehimpulses,
103
r
2
M ges s 2ω
M ges s 2ω 2
r&
r r
dL( S ) d M ges s ω r r
(ez − es cosα ) = −
=
cos α es = −
cos α ez × es ,
dt
dt
3
3
3
r
r r
r r
r
weil e&s = ω ez × es ist. Da ez × es = − sinα eϕ , gilt also
r
2 2
r
dL( S ) M ges s ω
=
cos α sin α eϕ .
dt
3
(3.6.7)
Setzen wir (3.6.7) auf der linken, und (3.6.4) auf der rechten Seite von (3.6.3) ein,
r
r r r
r
r r
r
und beachten dass s = ses , ez × es = − sinα eϕ , und er × es = − cos α eϕ , so erhalten wir
(nach Division durch die Gesamtmasse M ges , durch s, und durch ω 2 die gesuchte
Gleichung für den Neigungswinkel α :
s
g
sin α cos α = R cos α − 2 sin α ,
3
ω
(3.6.7)
die wir am bequemsten numerisch lösen würden. Dazu würden wir für Rω die im
Short Track Sport vorkommenden Kurvengeschwindigkeiten, für R die Radien der
Short Track Bahnen, und für s etwa 1 m einsetzen. Dann würden wir für α durchaus
die extremen Werte wie in der Abb. 3.6.1 erhalten.
Abschließend sei noch einmal hervorgehoben, dass wir diesen Neigungswinkel
gänzlich ohne Verwendung einer „Fliehkraft“ und nur durch systematisches Anwenden der Newtonschen Mechanik erhalten haben.
104
4. Literaturverzeichnis
Lenz, 2002: Karin Lenz: „Die Newtonsche Mechanik schülergerecht dargestellt für
den AHS-Unterricht als ein Musterbeispiel für das Modelldenken der Physik.“
Universitätsbibliothek Innsbruck
Röthig, 1992: Röthig u.a.: „Sportwissenschaftliches Lexikon. 6., völlig neu bearbeite
Auflage.“ Verlag Hofmann Schorndorf
Nachbauer, 2000: Werner Nachbauer: „Grundlagen der Biomechanik“, Vorlesung
am Institut für Sportwissenschaften der Universität Innsbruck, Wintersemester
2000
Pronegg, 1993: Christian Pronegg: „Einfache Mechanik im Schulunterricht“, Univer-
sität Innsbruck 1993, Abb. 3.1.a auf Seite 33
Wilczek, 2003: F. Wilczek, “Analysis and Synthesis I: What matters for Matter“,
Physics Today 56 (5), May 2003, pp 10-11]
105
5. Verzeichnis der Bildquellen
Abbildung. 2.4.2: http://www.ferrarihome.de/bilder/Ferrari/cwdata/9.html (mit eigener
Bearbeitung)
Abbildung 2.7.7: http://www.fig-gymnastics.com (mit eigener Bearbeitung)
Abbildung 2.7.10:
http://digilander.libero.it/VigOnLine/images/andrea_raggruppato_jpg.jpg (mit
eigener Bearbeitung)
Abbildung 2.7.11: Rainer Ballreich und Wolfgang Baumann: „Grundlagen der Bio-
mechanik des Sports“, Ferdinand Enke Verlag Stuttgart 1988 (mit eigener Bearbeitung)
Abbildung 3.2.1: http://www.sauber.ch/de/sauber/auto.html (mit eigener Bearbei-
tung)
Abbildung 3.2.2: http://www.uni-ulm.de/~phaegele/Vorlesung/Naturwiss_I/Reibung-
Leute.pdf (mit eigener Bearbeitung)
Abbildung 3.3.1: http://www.fritzstrobl.com (mit eigener Bearbeitung)
Abbildung 3.4.5:
http://www.stabhochsprung.com/movies/20030126_Becker_460.mov (mit eigener Bearbeitung)
Abbildung 3.5.1: www.olympic.org (mit eigener Bearbeitung)
Abbildung 3.6.1: http://www.fisu.net (mit eigener Bearbeitung)
106