1 Einführung
Werbung

1
Stichpunkte zur Vorlesung Nichteuklidische Elementargeometrie “
”
Wintersemester 2001/2002
1
Einführung
1.1
Historisches über euklidische und nichteuklidische Geometrie
Die Geometrie war ursprünglich eine Naturwissenschaft.
Erst allmählich gewann man die Einsicht, daß logische Abhängigkeiten bestehen und Deduktionen möglich
sind: Aus Evidenzen“ weitere wahre“ Sätze herleiten.
”
”
Heute ist die Geometrie eine rein deduktive mathematische Theorie, die aus einigen wenigen Axiomen
hergeleitet wird; freilich gibt es sehr unterschiedliche Wege solcher Herleitungen.
Um 300 v.Chr. gab es bei Euklid die Festschreibung grundlegender geometrischer Axiome, die als evident
angesehen wurden.
In der Zeit von 1800 bis 1930 gab es einen grundlegenden Wandel in der Auffassung des Wesens der
Geometrie, größere geistige Beweglichkeit, neue Theorien. Auch kompliziertere Geometrien“ wurden als
”
möglich erkannt und betrachtet.
Speziell: Die sog. nichteuklidischen Geometrien.
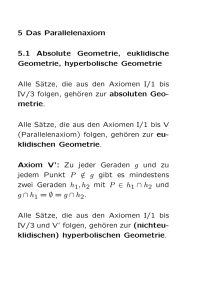
Bei Euklid findet sich folgender Sachverhalt als Axiom aufgeschrieben (“Parallelenpostulat“):
..
...
...
.
B...................................................................................................................................................................... h2
.
..
....
.....
.....................
...
...
.
.
..
...
...
...
...
.
.
..
...
......
... .....
... .....
.
.
...
..
...
...
...
...............................................................................................................................................................................................................
...
.
.
...
A
Wenn <
) (h1 , AB + )+ <
) (h2 , BA+ ) < π,
dann ist h1 ∩ h2 6= ∅.
h1
Euklid brauchte dieses z.B., um die Existenz von Rechtecken zu beweisen,
(der Unvoreingenommene fragt: Ist das denn nötig? Antwort: Wieso denn nicht?)
etwa durch Ergänzung eines rechtwinkligen Dreiecks zu einem Rechteck:
.............................................................................................................................................................................................
... ......
..... ..
... ........
...... ..
........... ..
.. .............
...... ..........................
.
.
......................... ............
.
.
.
.........
.......
...
......
..
......
......
......
....
......
...
...... ............
....
...
...........
.
.
.
.
...
...
.
......
....
.
.
.
.
.
.
...
...
.
.
......
....
.
.
.
.
.
.
...
...
.
.
......
....
.
.
.
.
.
.
...
...
.
.
......
....
.
.
.
.
.
.
...
..
.
.
......
..
...... ...........
.....................
..................................................................................................................................................................
A
B
D
C
Das bei B rechtwinklige Dreieck ABC sei gegeben. In C wird das
Lot auf BC errichtet, und D sei so auf diesem Lot in der Halbebene
BCA+ gewählt, daß AB ∼
= CD wird. Es folgt AC ∼
= BD, die Winkel
<
) BAD und <
) CDA sind kongruent. Behauptung: Diese Winkel sind
rechte. Beweis: Wären sie es nicht, z.B. <
) BAD < π2 , dann folgt nach
+
+
dem Parallelenpostulat AD ∩ BC 6= ∅, und aus
<
) CDA < π2 folgt DA+ ∩ CB + 6= ∅, also bestünde AC ∩ BC aus
mindestens zwei Punkten, was der eindeutigen
Verbindbarkeit zweier Punkte durch eine Gerade widerspricht; analog schließt man im Falle BAC >
π
2.
Bemerkung: Hier fragt der Leser berechtigterweise, ob er denn die Kongruenzsätze hier verwenden darf? Antwort: Ja, das
darf man schon, aber das sieht man erst ein, wenn man den Aufbau der Geometrie in den Details kennt. Es zeigt sich die
Notwendigkeit für den modernen Geometer, die Geometrie von Grund auf axiomatisch aufbauen zu können, siehe weiter
unten!
Gegen 1800 gab es verstärkte Überlegungen, das Parallelenpostulat aus anderen Axiomen herzuleiten. Die
Frage Was wäre, wenn...“ wurde in diesem Zusammenhang erörtert. Es gab zunächst keine Resultate bei
”
dem Bemühen, aus der Annahme der Negation des Parallelenpostulats einen Widerspruch herzuleiten.
Ungefähr um 1830: Gauss, Lobatschewski, Bolyai sahen, daß es eine widerspruchsfreie Geometrie
gibt, in der das Parallelenpostulat nicht gilt (nichteuklidische Geometrie). Die Veröffentlichungen von
Lobatschewski und Bolyai (Gauss veröffentlichte nichts) fanden kein Echo.
(Zur Intensität der Bemühungen: Das Verhältnis Vater und Sohn Bolyai.)
Nach 1860: Einfluß der Differentialgeometrie; Geometrie auf Flächen (Gauss: Geodätische als Geraden
2
1
EINFÜHRUNG
ansehen), aber i.a. keine längen- bzw. winkelerhaltenden Transformationen. Riemannsche Geometrie,
Kleinsche Räume. Die nichteuklidischen Geometrien (jetzt sogar viele!) wurden Allgemeingut der Mathematiker.
Spezialfall: Geometrie auf der Kugeloberfläche (sphärische Geometrie). Diese, obwohl längstens bekannt
und ein Beispiel einer Geometrie, in der es keine sich nicht schneidende Geraden gibt, hatte keinen Einfluß
auf die Theorie der Parallelen!
1.2
Zugänge zur Elementargeometrie – kurze Wegbeschreibungen und etwas
Axiomatik
Wir betrachten drei mögliche Wege:
1. Inzidenz, Anordnung, Kongruenz - der klassische Weg zur Elementargeometrie.
2. Der euklidische Rn - der Königsweg zur elementaren und höheren Geometrie.
3. Metrische Räume, Kleinsche Räume und andere - der Weg ins allgemeine.
Zu 1.:
Voraussetzungen: Nur Mengenlehre, Kenntnis über Mengen, Relationen, Operationen, Abbildungen, vielleicht noch Gruppen.
Wir betrachten hier nur ebene euklidische Geometrie.
a) Inzidenzlehre.
Definition einer ebenen (Inzidenz-)Geometrie:
Ein Paar (P, G) mit folgenden Eigenschaften:
(I0) P ist eine nichtleere Menge, ihre Elemente heißen Punkte. G ist ein nichtleeres System von Teilmengen von P, dessen Elemente Geraden heißen.
(I1) Zu zwei beliebigen verschiedenen Punkten gibt es genau eine Gerade, die diese Punkte enthält.
(I2) Ist g eine Gerade, P ein Punkt mit P ∈
/ g, so gibt es genau eine Gerade g 0 mit P ∈ g 0 und g ∩ g 0 = ∅.
(I3) Jede Gerade enthält mindestens zwei Punkte, und keine Gerade enthält alle Punkte.
Begriffe: Verbindungsgerade, kollinear, parallel wie üblich, insbesondere
g||h
:⇔
g ∩ h = ∅ oder g = h
Folgerungen: 1. Zwei Geraden haben entweder genau einen gemeinsamen Punkt oder sie sind parallel.
2. Parallelität ist eine Äquivalenzrelation. Klassen: Parallelenscharen oder Richtungen.
3. Zwei beliebige Geraden sind gleichmächtig.
2
Beispiele: R , Π22 .
Wie kann man auf diesem Standpunkt z.B. die Translationen beschreiben?
Antwort: Als bijektive geradentreue Abbildung τ : P → P mit P Q||τ (P )τ (Q) und τ (X) 6= X. Um die
Existenz von solchen Abbildungen zu sichern, sind weitere Axiome erforderlich (z.B. Desarguesscher
Satz).
b) Anordnungslehre
Zwei wesentliche Forderungen:
(A1) Jede Geraden wird ein Paar entgegengesetzter totaler Ordnungen ohne größtes und kleinstes Element zugeschrieben.
(A2) Jede Gerade bewirkt eine Seiteneinteilung der Ebene derart, daß zwei Punkte genau dann in verschiedenen Seiten einer Geraden liegen, wenn zwischen ihnen ein Punkt der Geraden liegt.
1.2
Zugänge zur Elementargeometrie – kurze Wegbeschreibungen und etwas Axiomatik
3
Die Begriffe Strecke, Halbgerade, Halbebene, Winkel, Umgebung, innere, äußere und Begrenzungspunkte
einer Punktmenge sind nun formulierbar.
c) Kongruenz
Kongruenz wird als Relation mit Eigenschaft der Abtragbarkeit und Zusammensetzbarkeit in der Menge
der Strecken und der Winkel gefordert, oder aber:
(K) Existenz und Auszeichnung einer Gruppe von geradentreuen, anordnungserhaltenden oder
-umkehrenden 1-1-Abbildungen von P auf sich mit Existenz und Einzigkeitsforderung: Zu zwei
Flags gibt es genau eine Abbildung, die die eine in die andere überführt; und zu zwei Winkelschenkeln gibt es eine Abbildung, die diese miteinander vertauscht.
(Flag: Ein Tripel Punkt (P , Halbgerade s , Halbebene H) mit P = Anfangspunkt von s und h ⊂
Begrenzung von H.
Aus den genannten Axiomen und einem Axiom über Abgeschlossenheit folgt im wesentlichen die bekannte
euklidische Geometrie der Ebene.
Zu 2.
Ein reeller Vektorraum V kann bekanntlich durch folgendes Axiomensystem charakterisiert werden:
(V1) (V, +) ist eine kommutative Gruppe.
(V2) λ(v + w) = λv + λw für alle λ ∈ R.
(V3) (λ + µ)v = λv + µv für alle λ, µ ∈ R, v ∈ V .
(V4) λ(µv) = (λµ)v für alle λ, µ ∈ R, v ∈ V .
(V5) 1 · v = v für alle v ∈ V .
Fordert man noch die Existenz einer endlichen Basis, so hat man endlichdimensionale affine Räume zur
Verfügung: Punkte sind Vektoren, Geraden sind eindimensionale lineare Mannigfaltigkeiten usw. Die
Anordnungsbeziehungen ergeben sich aus den Anordnungsbeziehungen der reellen Zahlen.
Eine Längenmessung wird ermöglicht, indem man V durch Hinzunahme eines Skalarproduktes zu einem
euklidischen Vektorraum macht. Ein Skalarprodukt ist bekanntlich eine Abbildung von V × V in R, die
zwei Vektoren v, w die reelle Zahl vw zuordnet, so daß gilt
(S1) vw = wv für alle v, w ∈ V ,
(S2) (u + v)w = uw + vw für alle u, v, w ∈ V
(S3) (λv)w = λ(vw) für alle λ ∈ R, v, w ∈ V ,
(S4) vv ≥ 0 für alle v ∈ V und vv = 0 genau für v = 0.
p
Die Länge einer Strecke pq ist dann (p − q)(p − q). Die Kongruenzabbildungen sind die affinen Abbildungen von V in sich mit orthogonaler Abbildungsmatrix. Die euklidische Geometrie in Räumen beliebiger
Dimension ist so auf die Axiome
(V1), . . . , (V5), (S1), . . . ,(S4) gegründet.
Es sei darauf hingewiesen, daß in diesem Rahmen auch nichteuklidische Geometrie betrieben werden
kann. Z.B. ist die 2-dimensionale sphärische Geometrie als Geometrie auf einer im dreidimensionalen
euklidischen Raum befindliche Kugeloberfläche realisierbar (vgl. Schluß von 1.1). Ebenso ist auch die 2dimensionale hyperbolische Geometrie (s.Kapitel 3) als Geometrie gewisser eindimensionaler Unterräume
des 3-dimensionalen euklidischen Raumes realisierbar; dazu später mehr.
Zu 3.
In euklidischen Räumen gilt:
Es gibt eine Funktion d, die je zwei Punkten P, Q eine reelle Zahl als Abstand zuordnet, und diese
Funktion hat folgende Eigenschaften:
(M1) d(P, Q) > 0 für alle P 6= Q und d(P, P ) = 0.
4
1
EINFÜHRUNG
(M2) d(P, Q) = d(Q, P )
(M3) d(P, R) ≤ d(P, Q) + d(Q, R)
Eine Menge, auf der eine solche Funktion d gegeben ist, heißt metrischer Raum. Jeder euklidische Raum
ist ein spezieller metrischer Raum.
Vom Begriff des metrischen Raumes ausgehend kann man Geometrie aufbauen. Um zur üblichen Geometrie zu gelangen, sind natürlich zahlreiche Zusatzaxiome nötig. Was soll in einem metrischen Raum z.B.
eine Gerade sein?
Spezialfälle von metrischen Räumen gewinnt man leicht aus Vektorräumen, indem man sie normiert:
Jedem Vektor v wird eine nichtnegative reelle Zahl kvk zugeordnet, so daß gilt:
(N1) kvk = 0 ⇒ v = 0
(N2) kλvk = |λ|kvk
(N3) kv + wk ≤ kvk + kwk
Als Abstand definiert man dann einfach d(v, w) := kw − vk
√
Beispiel: Euklidischer Vektorraum mit kvk = vv.
Die Norm muß nicht aus einem Skalarprodukt gewonnen werden. Beispiele zum R2 :
a) v = (x1 , x2 ) ⇒ kvk := |x1 | + |x2 |
b) v = (x1 , x2 ) ⇒ kvk := max(|x1 |, |x2 |) (führt auf sog. Manhattan-Metrik)
Aufgabe: Was für Punktmengen sind in diesen Metriken die Einheitskreise? In jedem Fall ist die Einheits”
kugel“ eine zentralsymmetrische konvexe Figur, und umgekehrt liefert jede zentralsymmetrische konvexe
Figur eine Norm. So entstehen viele im speziellen Sinne nichteuklidische Geometrien, die sog. BanachMinkowski-Geometrien.
Ein anderer Aspekt der Geometrie geht davon aus, daß es eine Gruppe von bijektiven Selbstabbildungen
der Menge ausgezeichnet ist, die auf der Menge transitiv operiert, d.h.: Zu je zwei Punkten gibt es
mindestens eine Transformation aus der Gruppe, bei der der eine Punkt auf den anderen abgebildet
wird. Und oft interessieren nur die Aussagen, die gegenüber Transformationen invariant sind (z.B. nur
die Längen und Winkel eines Dreiecks, nicht seine Lage z.B. gegenüber einem Bezugssystem). So ist
ein Kleinscher Raum einfach eine Menge mit einer auf ihr transitiv operierenden Gruppe, und die
Geometrie“ besteht wesentlich aus Aussagen über die Invarianten der Gruppe.
”
Weitere Räume“, auf denen Geometrie getrieben werden kann, die von der euklidischen Geometrie sehr
”
verschieden sein kann:
- Differenzierbare Mannigfaltigkeiten (Verallgemeinerung der in der elementaren Differentialgeometrie betrachteten Begriffe Kurve und Fläche),
- topologische Räume.
1.3
Der projektive Abschluß einer affinen Ebene
In den durch die Axiome (I0) bis (I3) aus 1.2 definierten Geometrien, insbesondere in der ebenen euklidischen Geometrie der Ebene gibt es Geraden, die leeren Durchschnitt haben. Man kann solche Ebenen
auf einfache Weise so erweitern, daß zwei Geraden stets einen nichtleeren Durchschnitt haben:
Es sei (P, G) ein System, das diesen Axiomen genügt, d.h. eine affine Inzidenzebene. Die Parallelität ist
eine Äquivalenzrelation, die Klassen heißen Parallelenscharen. Es sei U eine zum System aller Parallelenscharen gleichmächtige Menge mit
P ∩ U = ∅, ihre Elemente mögen uneigentliche Punkte heißen.
Erweiterung:
(I) Jeder Gerade aus G wird genau ein uneigentlicher Punkt hinzugefügt.
(II) Zwei Geraden bekommen genau dann den gleichen uneigentlichen Punkt hinzugefügt, wenn sie
parallel sind.
1.3
Der projektive Abschluß einer affinen Ebene
5
(III) Die Menge U wird der Menge G als weiteres Element hinzugefügt.
Es entsteht ein neues System (P1 , G1 ) mit
P1
G1
:= P ∪ U
:= System aller erweiterten Geraden ∪ {U},
Die Elemente von P1 mögen auch Punkte, die von G1 auch Geraden heißen. Dann hat (P1 , G1 ) folgende
Eigenschaften:
(P1) Zu zwei verschiedenen Punkte existiert genau eine Gerade, die die beiden Punkte enthält.
(P2) Zwei verschiedene Geraden haben genau einen gemeinsamen Punkt.
(P3) Jede Gerade enthält mindestens drei Punkte, und es gibt vier Punkte, von denen je drei nicht auf
ein und derselben Geraden liegen.
Beweis zu (P1): A, B ∈ P : klar.
A ∈ P, B ∈ U : wegen Axiom (I2) und (II).
A, B ∈ U : wegen Definition von G1 .
Beweis zu (P2): Lassen die uneigentlichen Punkte weg. Falls die beiden Geraden dann nicht
parallel sind, haben sie genau einen Punkt gemeinsam, keinen uneigentlichen.
Falls sie dann parallel sind, wurden sie um denselben uneigentlichen Punkt
erweitert wegen (II).
Beweis zu (P3): Aus (I3) und (I).
Ein System von Punkten und Geraden, das (P1), (P2) und (P3) erfüllt, heißt projektive Ebene.
Es bildet hier den sog. projektiven Abschluß der Ebene (P, G).
Satz: Zu jeder Inzidenzebene existiert ein projektiver Abschluß.
Umgekehrt:
Satz: Ist (P1 , G1 ) eine projektive Ebene, g0 eine Gerade aus G1 , so ist
(P \ g0 , G \ {g0 }) eine affine Inzidenzebene.
Beweis: Aufgabe.
Die projektive Abschließung einer affinen Inzidenzebene wird problematisch, wenn man Anordnungsoder gar Kongruenz- bzw. Längenbeziehungen mit in Betracht ziehen will, wie folgende nicht korrekt
begründete, also mehr anschauliche Überlegung zeigt:
In einer Geometrie mit Anordnung (insbesondere Seiteneinteilung), Streckenabtragung und Längenmessung in üblicher Weise (analog der euklidischen Geometrie) gibt es mit Notwendigkeit Geraden, die einen
leeren Durchschnitt haben; folglich muß in Geometrien mit üblicher Anordnung und Längenmessung, in
der sich zwei Geraden stets schneiden, jede Gerade notwendig eine endliche Länge haben.
Begründung:
....
...
..
...
...
...
...
.
.
.
.
.
.
.
.
.
.
.............................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................
...................... ............................................ ................................................................................
.
.
.
.
.
.
...............................................
.
.
.
.
.................. ....... ... ....... ...........................
.
.
.
.
.
.
.
.
.
..... ........ ...........
.
...... ........... .......
.
.
.
.
.
.
..
...
.
.....
.
.
.
.
..
.....
........
..... .............. ...................
....
.....
.......... ..............
..........
.......
.....
.....
..........
..........
.......
...
.....
.......
.....
..........
........
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....................................................................................................................................................................................................................................................................................................................................................
Z
g
Q3
Q2
Q1
M
P1
P2
P3
g Gerade, Q1 , P1 ∈ g, Z ∈
/g
M Mittelpunkt von Q1 P1 .
t
P2 , P3 , . . . so, daß Pi Pi+1 = M P1 .
t
Q2 , Q3 , . . . so, daß Qi Qi+1 = Q1 M .
Die Folge der Geraden ZPi , i = 1, 2, . . .
hat eine Grenzgerade, welche g nicht
schneiden kann, ebenso lim ZQi .
i→∞
In der euklidischen Ebene sind diese beiden Grenzgeraden gleich und gleich der Parallelen zu g durch Z.
In der hyperbolischen Geometrie (s. Kapitel 3) sind sie verschieden voneinander.
6
2
2
2.1
SPHÄRISCH-ELLIPTISCHE GEOMETRIE
Sphärisch-elliptische Geometrie
Von der projektiven Ebene zur elliptischen Ebene und zur zweidimensionalen sphärischen Geometrie
Eine projektive Ebene ist ein System (P, G), wo P eine nichtleere Menge ist, deren Elemente Punkte heißen, G ein System von Teilmengen von P ist, dessen Elemente Geraden heißen, so daß die die
Eigenschaften (P1), (P2), (P3) aus Abschnitt 1.3 gelten.
In bestimmter Weise gehen die Begriffe Punkt und Gerade in (P1) und (P2) symmetrisch ein.
Die zu (P3) symmetrische Aussage ist:
(P3)’ Zu jedem Punkt gibt es mindestens drei ihn enthaltende Geraden, und es gibt vier Geraden, von
denen nicht drei denselben Punkt gemeinsam haben.
Behauptung: (P3)’ folgt aus (P1), (P2), (P3).
Beweis: (P3) =⇒ es existieren A1 , A2 , A3 , A4 ∈ P, keine drei in derselben Geraden enthalten
=⇒ die Geraden A1 A2 , A2 A3 , A3 A4 , A4 A1 haben die Eigenschaft in (P3)’.
Ist X ein beliebiger Punkt, so findet man drei X enthaltende Geraden ( z.B. Fallunterscheidung: 1.: X ∈ {A1 , . . . A4 },
2.: X ∈ Ai Aj , 3.: Weder 1. noch 2.
Genaue Formulierung der Gleichberechtigung von Punkten und Geraden in einer projektiven Ebene:
Satz(Dualitätsprinzip): Ist (P, G) eine projektive Ebene, und definiert man für beliebige
g ∈ G, X ∈ P:
g ∈∗ X :⇐⇒ X ∈ g,
so bildet das Paar (G, P) mit ∈∗ als Elementbeziehung ebenfalls
eine projektive Ebene, die zu (P, G) duale Ebene.
Beweis: Mit ∈∗ wird P ein Teilmengensystem von G. Aus (P1) wird (P2), aus (P2) wird (P1), und (P3)
wird zu (P3)’.
Es sei jetzt (G, P) die reelle projektive Ebene, d.h. der projektive Abschluß der reellen affinen Ebene
(Ga , Pa ), P = Pa ∪ Pu . Es läßt sich ein wichtiger Zusammenhang der reellen projektiven Ebene zu den
ein- und zweidimensionalen linearen Unterräumen des R3 feststellen:
..................................................................................................................................................
...
.....
...
.....
...
.....
Es wird Pa als eine Ebene ε in den dreidimensiona.....
.....
..
.....
.
.
.....
.
.......... Z
...
....
.
.
3
.
.
.
.
.
.
..
....
len affinen Raumes R eingebettet. Ferner wird ein
.....
..
ε1
.....
.....
.....
.
.....
........................................................................................................................................................
...
Punkt
...
...
.
Z ∈ R3 , Z ∈
/ ε betrachtet, und ε1 sei
............................................................................................................................................................
.....
...
.
..
.
.
....
...
...
.
.
.
.
.....
.... X
...
die Ebene durch Z parallel zu ε.
.
.
.....
.
.
..
...
.....
.
.
.
.
.
.
.
.
..
..
..
ε
.....
.....
.
Dann gilt:
.....
.....
......................................................................................................................................................
a) Die Zuordnung X ∈ ε 7→ Gerade ZX ist eine Bijektion von ε auf die Menge der nicht in ε1
liegenden Geraden durch Z.
b) Die Geraden durch Z, die in ε1 liegen, können bijektiv den Parallelenscharen von ε zugeordnet
werden.
Aus a) und b) folgt: Es gibt eine Bijektion von P auf die Menge aller Geraden des R3 durch Z. Sie hat
die Eigenschaft, daß Punkte aus P genau dann kollinear sind, wenn die zugeordneten Bildgeraden in
derselben Ebene liegen.
Satz: Ist (P, G) die reelle projektive Ebene, Z ein Punkt des dreidimensionalen affinen
Raumes, so gibt es eine Bijektion von P auf die Menge aller Geraden des
Raumes durch Z, welche über die Teilmengenbeziehung eine Bijektion von G
auf die Menge aller Ebenen des Raumes durch Z induziert.
Kurz:
Die Punkte und Geraden der reellen projektiven Ebene sind bezüglich des Enthaltenseins isomorph als die 1- und 2-dimensionalen linearen Unterräume des R3 darstellbar.
An folgende Sachverhalte aus der linearen Algebra des Rn sei erinnert:
2.1
Von der projektiven Ebene zur elliptischen Ebene und zur zweidimensionalen sphärischen Geometrie7
a) das Standard-Skalarprodukt, das zwei Vektoren x = (ξ1 , . . . , ξn ) und y = (η1 , . . . ηn )
die reelle Zahl xy = ξ1 η1 + . . . ξn ηn zuordnet,
b) das orthogonale Komplement U ⊥ eines linearen Unterraumes U ⊆ Rn :
U ⊥ := {x ∈ Rn : xu = 0 für alle u ∈ U }.
Das orthogonale Komplement hat folgende Eigenschaften:
1) Speziell im R3 gilt: dim U = 1 =⇒ dim U ⊥ = 2
2) Speziell im R3 gilt: dim U = 2 =⇒ dim U ⊥ = 1
3) (U ⊥ )⊥ = U
4) U ⊆ V =⇒ U ⊥ ⊇ V ⊥
5) U ∩ U ⊥ = {0}
Übersetzung dieser Eigenschaften in die Sprache der projektiven Ebene (P, G):
Es gibt eine Abbildung pol von P ∪ G auf P ∪ G mit folgenden Eigenschaften:
1) Das Bild eines Punktes ist eine Gerade, sie wird als Polare des Punktes bezeichnet.
2) Das Bild einer Geraden ist ein Punkt, er wird als Pol der Geraden bezeichnet.
3) Die Abbildung ist involutorisch (d.h. pol ◦ pol = id.)
4) Aus P ∈ g folgt pol g ∈ pol P , d. h. die Polare eines Punktes einer Geraden geht durch den Pol dieser
Geraden, und der Pol einer Geraden durch einen Punkt liegt auf der Polaren dieser Geraden.
5) Pol und Polare sind nie inzident.
Eine solche Abbildung heißt auch Polarsystem oder Polarität.
Geometrische Deutung im dreidimensionalen euklidischen Raum: P = g ⊥ ist die lineare Hülle eines
Normalenvektors der g darstellenden Ebene, und die p = P ⊥ darstellende Ebene ist senkrecht zu den
Vektoren von P .
Bemerkung: Es gibt auch andere Polarsysteme, in denen nur die Eigenschaften 1) bis 4) gelten und 5) nicht erfüllt ist; solche
entstehen bei Ersetzung des Standardskalarproduktes durch eine andere symmetrische Bilinearform.
Die Gruppe der bijektiven linearen Abbildungen des R3 erzeugt in der projektiven Ebene eine Gruppe
von geradentreuen Abbildungen, die sog. Kollineationen. Die linearen Abbildungen ϕ, für die ein reelles
λ mit ϕ(v) = λv für alle v ∈ R3 gilt (zentrische Streckungen), erzeugen in der projektiven Ebene nur die
identische Abbildung, und zwei lineare Abbildungen erzeugen genau dann dieselbe Kollineation wenn sie
sich nur durch eine Streckung unterscheiden.
Die Kollineationsgruppe der projektiven Ebene ist ziemlich umfangreich. Man kann zeigen:
Satz: Sind (P1 , P2 , P3 , P4 ) und (Q1 , Q2 , Q3 , Q4 ) zwei Punktquadrupel, i n denen keine drei Pi bzw.
keine drei Qi kollinear sind, so existiert genau eine Kollineation κ mit κ(Pi ) = Qi für i =
1, 2, 3, 4.
Beweis: Übungsaufgabe.
Bei Kollineation ist das Bild des Pols einer Geraden i.a. nicht der Pol der Bildgeraden.
Auszeichnung einer Untergruppe der Kollineationsgruppe:
Es sei G0 die Menge derjenigen Kollineationen κ, die die Pol-Polaren-Beziehung invariant lassen, für die
also gilt
x = pol y =⇒ κ(x) = pol κ(y)
Offenbar ist G0 eine Gruppe. Die linearen Abbildungen des R3 , die diese Kollineationen erzeugen, haben
die Eigenschaft, daß die Bilder zweier Vektoren mit dem Skalarprodukt 0 ebenfalls das Skalarprodukt 0
haben.
Hilfssatz: Sei E ein endlichdimensionaler euklidischer Vektorraum, ϕ eine lineare Abbildung
ϕ : E −→ E mit der Eigenschaft
xy = 0 =⇒ ϕ(x)ϕ(y) = 0 für alle x, y, ∈ E
Dann existiert ein % > 0 mit ϕ(u)ϕ(v) = %uv für alle u, v, ∈ E.
Vor.
Beweis: Sei e1 , . . . , en eine Orthonormalbasis von E. ei ej = 0 =⇒ ϕ(ei )ϕ(ej ) = 0, Bild der Basis ist
8
2
SPHÄRISCH-ELLIPTISCHE GEOMETRIE
(nicht notwendig normierte) Orthogonalbasis.
Vor.
(ei + ej )(ei − ej ) = e2i − e2j = 0 =⇒ ϕ(ei + ej )ϕ(ei − ej ) = 0
=⇒ (ϕ(ei ) + ϕ(ej ))(ϕ(ei ) − ϕ(ej )) = 0, (ϕ(ei ))2 − (ϕ(ej ))2 = 0, kϕ(ei )k2 = kϕ(ej )k2 =: %.
P
P
Sei u = ξi ei ,Pv = ηjP
ej . Es folgtP
P
ϕ(u)ϕ(v) = ϕ( ξi ei )ϕ( ηj ej ) = ξi ηj ϕ(ei )ϕ(ej ) = % ξi ηi , w.z.b.w.
Zu den Kollineationen, die die Pol-Polaren-Beziehung invariant lassen, führen demnach diejenigen linearen
Transformationen des R3 , die das Skalarprodukt entweder invariant lassen oder mit einem konstanten
positiven Faktor multiplizieren. Das sind genau die Isometrien (orthogonale lineare Abbildungen) und
die Streckungen.
Definition der elliptischen Ebene: (als Kleinscher Raum, vgl 1.2, S.4)
Die reelle elliptische Ebene ist die reelle projektive Ebene, zu der als Gruppe von
Kongruenztransformationen die Gruppe der die Pol-Polaren-Beziehung invariant lassenden Kollineationen genommen wird.
Diese Gruppe hat tatächlich die beiden wesentlichen Eigenschaften einer Gruppe von Kongruenztransformationen: Zu zwei Punkten gibt es stets (unendlich viele) Transformationen, die den einen Punkt auf
den anderen abbilden, aber zu einem Paar (P, g) von Punkt und Gerade mit P ∈ g gibt es genau vier
Transformationen, die P als Fixpunkt haben und g auf sich abbilden. (Beweis als Aufgabe).
Zwei Modelle der elliptischen Ebene:
a) Punkte:
diametrale Punktepaare der Einheitskugeloberfläche im E3
Geraden:
Großkreise (d.h. Schnitte der Ebenen durch o mit Kugeloberfläche)
mit Diametralpunkt-Identifizierung
Kongruenztransformationen: Kongruenztransformationen des E3 ,
die o festlassen, modulo Punktspiegelung an o.
b)
Punkte:
Geraden:
Kongruenztransformationen:
Punkte der Halbkugel auf der Einheitskugeloberfläche im E3
mit Identifizierung der Diametralpunkte des Randkreises
Durchschnitte von Großkreisen mit der Halbkugel, und der Randkreis
Kongruenztransformationen des E3 , die o festlassen,
eingeschränkt auf die Halbkugel und Ersetzung von Bildpunkten,
die nicht auf der Halbkugel liegen, durch ihre Diametralpunkte.
An diesen Modellen läßt sich der Mechanismus der Pol-Polaren-Beziehung und der
Kongruenztransformationen erkennen. Jede Gerade ist längentreu zu R modulo π isomorph.
Man beachte, daß die projektive Ebene und erst recht die elliptische Ebene nicht orientierbar ist, wie
folgendes Beispiel zeigt: Ein Kreis ändert seinen Umlaufsinn bei einer stetigen Bewegung innerhalb der
elliptischen Ebene.
...........................................................
.............
........
........
.....
.....
...
......
....
.........
.........
.
.
.
... ............
.
.
.
.
...... ...
...................
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................
.
...
...
.
...
...................
...
...
.
...
...
....
...... 1 .....3
....
.....
2
.
.
.
.
.
...
......
.
.. .....
.......
......
.......... .......... ...............
........................
−→
3
2
.....................................................................
........
..... 1 .....
.............
.....
........
.............
...
.....
....
......
.....
....
.........
.
.......
. ..
.
.
.
... ............
.
.
.
.
.
..3 ................... ....
...................2...
...
.
.
.
.
.
.
.
.
.
.
.
......................
.
...
.
...
...
...
..................
...
...
...
....
....
.....
.
.
.
.
......
.
.......
......
......
..........
.................................
−→
...........................................................
.............
........
................
........
.....
....
.....
...
.
3......
......2
......
...
....
.
.........
.
........1
.........
.
.
.
... ............
.....
.
.
.
.
.
.
.
.
...... ...
...................
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................
.
...
...
...
...
...
...
....
....
.....
.
.
.
.
......
.
.......
......
......
..........
.................................
−→
...........................................................
.............
........
........
.....
.....
...
......
....
.........
.........
.
.
.
... ............
.
.
.
.
...... ...
...................
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.......................
.
...
...
.
...
...................
...
...
.
...
...
....
...... 1 .....2
....
.....
3
.
.
.
.
.
...
......
.
.. .....
.......
......
.......... .......... ...............
........................
Eine Gerade bewirkt keine Seiteneinteilung in zwei Halbebenen; zwei Geraden erzeugen zwei Einecke“.
”
Der Anschauung steht die Geometrie auf der Kugeloberfläche des dreidimensionalen euklidischen Raumes
näher als die Geometrie der elliptischen Ebene. Daher wird gern in dem unter a) angegebenen Modell die
Identifizierung von Diametralpunkten aufgegeben. Die Punkte einer Kugeloberfläche mit den Großkreisen als Geradensystem erfüllen dann zwar die Axiome (I1) und (I2) nicht mehr, aber die erforderlichen
Modifizierungen (nämlich: eindeutige Verbindbarkeit nur für nicht diametrale Punkte, und zwei Geraden
haben stets zwei diametrale gemeinsame Punkte) sind gegenüber dem Gewinn an Anschauung so geringfügig, daß man statt ebener elliptischer Geometrie einfach Geometrie auf der Kugeloberfläche treiben
kann, man spricht dann von zweidimensionaler sphärisch-elliptischer Geometrie.
In den folgenden Abschnitten wird elliptische Geometrie in diesem Sinne, also als sphärisch-elliptische
Geometrie, betrachtet werden.
2.1
Von der projektiven Ebene zur elliptischen Ebene und zur zweidimensionalen sphärischen Geometrie9
Exkurs über einen projektiven Zugang zur hyperbolischen nichteuklidischen Geometrie:
Die projektive Ebene kann durch Auszeichnung anderer Untergruppen der Kollineationsgruppe zu anderen Kleinschen Räumen führen. Wählt man z.B. eine Gerade der projektiven Ebene aus und betrachtet
nur diejenigen Kollineationen, die diese Gerade in sich selbst überführen, so ergibt sich eine zur Gruppe
der affinen Transformationen der euklidischen Ebene isomorphe Gruppe – der entsprechende Kleinsche
Raum ist die affine Ebene. Auch die im Kapitel 3 dieser Vorlesung zu behandelnde hyperbolische nichteuklidische Geometrie kann auf diese Weise gewonnen werden. Dies wird jetzt gezeigt; dieser Zugang zur
hyperbolischen Geometrie wird allerdings in Kapitel 3 nicht benutzt werden.
Die projektive Ebene werde wieder als projektiver Abschluß der Ebene x3 = 1 des reellen dre11idimensionalen
euklidischen Raumes aufgefaßt.
Definition einer Untergruppe H der Kollineationsgruppe:
H:= Gruppe derjenigen Kollineationen der projektiven Ebene, die den Kreis {(x1 , x2 , x3 ) ∈ R3 : x21 +
x22 = 1, x3 = 1} in sich überführen.
Die Gruppe der linearen Abbildungen des R3 , die zu H gehören, lassen also den Kegel x21 + x22 − x23 = 0
invariant. Die Rotationen um die x3 -Achse und die Spiegelungen an Ebenen durch die x3 -Achse gehören
zu dieser Gruppe.
Es sei A = (aik ) die Abbildungsmatrix einer linearen Abbildung, die eine Kollineation aus H induziert.
Durch Zusammensetzung mit einer Rotation um die z3 -Achse kann erreicht werden, daß a11 = 0 ist:
cos ϕ − sin ϕ 0
a · ·
a11 · ·
sin ϕ cos ϕ = · b · · = ·
· · ,
0
0
1
· · ·
·
· ·
a11 = a cos ϕ − b sin ϕ = 0 ist durch passende Wahl von ϕ erreichbar.
Unter Verwendung der Matrizen
x1
1 0 0
x := x2 ,
M := 0 1 0
x3
0 0 −1
kann die Invarianz des Kegels x21 + x22 − x23 = 0 durch die Forderung
!
xT M x = (Ax)T M Ax = xT AT M Ax
realisiert werden. Das bedeutet, daß die Matrix A die Gleichung
AT M A = M,
erfüllt, d.h., für die Spaltenvektoren gilt
a21i a21j
a21i + a22i − a23i
+ a22i a22j − a23i a23j
= ±1
= 0 für i 6= j,
−1
analoges gilt für die Zeilenvektoren wegen M = M −1 = A−1 M AT , also AM AT = M . Rechnet man
die Matrix spaltenweise aus, so ergibt sich nach etwas Rechnung:
√
b
0
± 1 + b2
√
√
2
2
A= ± 1+a
±ab
±a 1 + b
√
√
√
2
2
2
a
±b 1 + a ± 1 + a 1 + b
(Die Vorzeichen sind nicht unabhängig voneinander wählbar!).
Die Gruppe H wird also von linearen Abbildungen induziert, deren Abbildungsmatrizen Produkte von
Matrizen der Form A und Matrizen von Rotationen um die x3 -Achse sind.
Diese Gruppe hat folgende Eigenschaft: Sind P, Q beliebige Punkte im Inneren des Kreises x21 + x22 = 1,
x3 = 1 und g, h Geraden der projektiven Ebene mit P ∈ g, Q ∈ h, so gibt es genau vier Transformationen
10
2
SPHÄRISCH-ELLIPTISCHE GEOMETRIE
in der Gruppe H, die (P, g) in (Q, h) überführt. Zum Beweis wird hier nur gezeigt, daß es endlich viele
solche Transformationen gibt. Dazu genügt es zu zeigen, daß es zu gegebenen
q, r mitp2 +
q 2 − r2 < 0
p,
0
p
mindesten eine, aber höchstens endlich viele Matrizen A gibt, so daß A 0 = % q gilt. Das
1
r
entsprechende Gleichungssystem
b
p
2
±a 1 + b
p
p
± 1 + a2 1 + b2
= %p
= %q
= %r
q2
−1
und %2 = 2
. Wegen p2 + q 2 − r2 < 0 ist der Bruch für
+1
p + q 2 − r2
%2 positiv, es gibt also Lösungen %, a, b.
Somit kann man mittels der Gruppe H einen Kleinschen Raum definieren:
Definition der hyperbolischen Ebene: (als Kleinscher Raum):
Die hyperbolische Ebene ist die Menge der inneren Punkte eines in der reellen
projektiven Ebene liegenden Kreises; die Geraden sind alle nichtleeren Durchschnitte von Geraden der projektiven Ebene mit dieser Kreisfläche, und die
Kongruenztransformationen sind die diesen Kreis invariant lassenden Kollineationen (Gruppe H) der projektiven Ebene.
An dieser Darstellung der hyperbolischen Ebene ist sofort zu erkennen, daß das Verbindbarkeitsaxiom
erfüllt ist, daß es aber zu einer Geraden g und einem Punkt P mit P ∈
/ g unendlich viele Geraden h mit
P ∈ h gibt, die g nicht schneiden.
führt auf b2 = %2 p2 ,
2.2
a2 = %2
%2 p 2
Sphärische Trigonometrie
Literatur: M.Berger, Geometry II, Springer-Verlag Berlin, Heidelberg, New York 1987
2.2.1
Größen zur Erfassung sphärischer Dreiecke
Es sei S 2 die Einheitskugelfläche im dreidimensionalen euklidischen Raum.
Sphärisches Dreieck:
Drei Punkte auf S 2 , deren Ortsvektoren linear unabhängig sind; die
Punkte werden auch Ecken genannt. Bezeichnung: Dreieck xyz.
Kürzerer der beiden Kreisbögen, die von x und
Seiten des sphärischen Dreiecks xyz:
y (bzw. von y und z bzw. von z und x) auf dem
durch x und y (bzw. von y und z bzw. von z
und x) festgelegten Großkreis erzeugt werden.
Inneres eines sphärischen Dreiecks xyz: Durchschnitt der drei Halbkugelflächen xyz + , yzx+ , zxy + .
Zur Beschreibung von Winkeln verwendet man zweckmäßig Tangentialvektoren an die Dreiecksseiten.
xy
............
........................................................................... . .... ...............
.
.6
.
.
x
.
.
.
.
.
......
...
.....
..........
.....
Definition: Für linear unabhängige Vektoren x, y ∈ S 2 sei xy der Vektor
...
.....
....
...
...
.
.
...
mit folgenden Eigenschaften (“Tangentialvektor von x nach y“):
....
...
...
...
.
...
.
(1) xy ⊥ x
...
....
...
...
...
.
.
...
(2) xy liegt in der von o, x, y erzeugten Ebene
....
...
......
.
.....
...
o ...........
(3) |xy | = 1
....
.....
.
.
.....
.
.
.
.
.....
(4) xy weist auf dieselbe Seite bezgl. x wie y
..
..... y
..
...
.....
..
.....
..
.....
..... .....
..... ...
...
R
1
;
Berechnung von xy : (2) ⇒ xy = λx + µy; (1) ⇒ λ = −µxy, also xy = µ(y − (xy)x); (3) ⇒ µ = ± |y−(xy)x|
(4) bedeutet: Ist speziell x ⊥ y, so muß xy = y sein, also muß das obere Vorzeichen genommen werden.
Insgesamt:
1
xy =
(y − (xy)x)
|y − (xy)x|
2.2
Sphärische Trigonometrie
11
Traditionelle Stücke“ eines Dreiecks:
”
z
Seiten:
_
a :=yz=<
) (y, z),
_
b :=zx=<
) (z, x),
_
c :=xy=<
) (x, y),
Winkel:
....
...... ..........
.....
.....
.....
.....
.....
.....
.
.
.
.
..
..
..... ......
..... .....
.... ............................... ........
.
.
.
...
..
.
...
.
..
...
.
.
.
...
...
...
...
...
.
.
..
.
.
..............
..........
.
.
.....
..... ....
..
.
.
.
.
...
...
...
....
...
.
...
...
...
...
..
..
...
..
.
..........
....
....
.
.
.
.
.
.
.
........... .
..................
..................
.
.
.
.............................................
γ
α :=<
) (xy , xz )
β :=<
) (yz , yx )
γ :=<
) (zx , zy )
b
a
α
x
2.2.2
β
c
y
Polarität
Auf Grund der in 2.1 (S.9) genannten geometrischen Bedeutung der Pol-Polaren-Beziehung kann man
_
diese auf S 2 so formulieren, daß die Polare eines Punktes P die Menge p := {X : X ∈ S 2 , XP = π2 }
ist, sie ist ein Großkreis. Die Ebene, die p enthält, hat den Ortsvektor von P als Normalenvektor. Das
Senkrechtsein zweier Großkreise g, h kann über die Polarenbeziehung so charakterisiert werden:
g ⊥ h ⇐⇒ pol(g) ∈ h ⇐⇒ pol(h) ∈ g
Die Abbildung P unkt 7→ P olare ist nicht eindeutig umkehrbar: Der zu P diametrale Punkt hat dieselbe
Polare. Jeder Großkreis hat also zwei diametrale Pole.
Folgende Aussagen sind äquivalent:
X liegt auf der Polaren von P ,
_
XP = π2 ,
P liegt auf der Polaren von X.
Polardreieck:
Ordnet man einer jeden Seite eines Dreiecks denjenigen ihrer beiden Pole zu, der auf derselben Halbkugelfläche wie der jeweilige dritte Dreieckspunkt liegt, so erhält man das Polardreieck des Ausgangsdreiecks.
Genauer:
xyz sei ein sphärisches Dreieck.
x0 sei der Einheitsvektor mit x0 y = x0 z = 0 und xx0 > 0,
y 0 sei der Einheitsvektor mit y 0 z = y 0 x = 0 und yy 0 > 0,
z 0 sei der Einheitsvektor mit z 0 x = z 0 y = 0 und zz 0 > 0
Dann sind x0 , y 0 , z 0 linear unabhängig, denn aus λx0 + µy 0 + νz 0 = 0 folgt durch Multiplikation mit x, y, z,
dass λ = µ = ν = 0 ist. Die drei Punkte bilden also ein Dreieck, das Polardreieck (xyz)0 von xyz.
Aus der Definition (die in den gestrichenen und ungestrichenen Variablen symmetrisch ist) folgt sofort:
((xyz)0 )0 = xyz.
Beziehungen zwischen den Stücken“ eines Dreiecks und denen seines Polardreiecks:
”
Hat das sphärische Dreieck xyz die Stücke a, b, c, α, β, γ und hat das zugehörige Polardreieck (xyz)0 die
Stücke a0 , b0 , c0 , α0 , β 0 , γ 0 , so gilt
a + α0 = b + β 0 = c + γ 0 = a0 + α = b0 + β = c0 + γ = π
Beweis:
12
2
SPHÄRISCH-ELLIPTISCHE GEOMETRIE
Wegen der Polarität und der Gleichberechtigung der drei
Ecken genügt es, z. B. die Beziehung a0 + α = π nachzuweisen.
Es ist α =<
) (xy , xz ) und a0 =<
) (y 0 , z 0 ). Die Vektoren xy
und xz sind parallel zu derjenigen Ebene, die durch o geht
und senkrecht zu x ist.
Nach Definition von y 0 ist y 0 ⊥ x und y 0 ⊥ z, also ist y 0
ebenfalls parallel zu dieser Ebene, und es ist <
) (xz , y 0 ) = π2 .
0
0
0
Ebenso: Wegen z ⊥ x und z ⊥ y ist z parallel zu dieser Ebene, und es ist unter Beachtung der Orientierung
<
) (xy , z 0 ) = − π2 .
Es folgt
α + a0 =<
) (xy , xz )+ <
) (y 0 , z 0 ) =
0
0
=<
) (xy , z )+ <
) (z , xz )+ <
) (y 0 , xz )+ <
) (xz , z 0 ) = −π, q.e.d.
2.2.3
..
...
..
...
...
...
...
...
...
...
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................................................
.
.
............
.
.
.
............
.
.
.
.
.
.
.
...
.
..........
......
.
.
.
.
.
.
.
...
........
.
......
.
.......
.
.
.
.
...
.
......
....
.
.
.
.
.
......
.
.
.
....
z
.
.
.
.
.
.
.......
.
....
.
.
............ ........
.
.
.
.
.
.
.
....... .
.
...
.
.
.
..
.
...
.
.
.
.
.
.
.
.
...
........
.
.
.
..
.
..
.
.
.
.
.
.
.
.
...
.....
..
...
.... ..........................
..
..
.
...........
.....
...
.........................................
...
..
..... .......... ......... ..............................................................
.
.
.
.
.
.
...
...............
.........
...
..
.
.
.
.
.
.
...
.
.
.
.
.
.
.....
..
...
.....
..... .............
.....
...
.. ...
.....
.....
.....
....................................................................
......
.....
.....
.....
......
......
.....
.....
.
.
.
.
.
.
.
.
.......
.
..
.....
....
........
.......
.....
......... .........
..... .................
..............
.......... 0
................
..................................................................................
x
6
x
*
o
xy
- z0
R
y
Fundamentalformeln der sphärischen Trigonometrie
Die sechs Stücke eines Dreiecks sind nicht unabhängig, durch drei von ihnen sind die übrigen schon
bestimmt. Das wird durch die folgenden Sätze genauer gezeigt.
Seitenkosinussatz:“
”
Für jedes sphärische Dreieck mit den Stücken a, b, c, α gilt
cos a = cos b cos c + sin b sin c cos α
Beweis:
x, xy bilden eine Orthonormalbasis (ein kartesisches Koordinatensystem), folglich gilt wegen
_
c =xy=<
) (x, y) die Gleichung
y = (cos c)x + (sin c)xy
_
Ebenso: x, xz ist ein Orthonormalsystem, xz= b =<
) (x, z), also
z = (cos b)x + (sin b)xz
Es ist a =<
) (y, z) also
cos a = cos <
) (y, z) = yz = (x cos c + xy sin c)(x cos b + xz sin b)
Wegen xxy =xxz = 0 und xy xz = cos(xy , xz ) = cos α folgt die Behauptung.
Sinussatz“:
”
Für jedes sphärische Dreieck mit den Stücken a, b, c, α, β, γ gilt
sin a
sin b
sin c
=
=
sin α
sin β
sin γ
Beweis:
x, xy und v := x × xy bilden ein rechtwinkliges Koordinatensystem. In diesem haben x, y, z folgende
Koordinaten:
1
cos <
) (x, y)
cos c
) (x, y) = sin c , denn y liegt in der von x und xy erzeugten Ebene.
x = 0 ,
y = sin <
0
0
0
Ferner ist z = λx + µxz und wegen xz ⊥ x gibt es %, σ mit xz = %xy + σv.
λ = zx = cos b,
cos b
µ = zxz = sin b,
Es ist:
also:
z = sin b cos α
% = xz xy = cos α,
sin b sin α
σ = sin α,
Es folgt:
1 cos c
cos b
det(x, y, z) = det 0 sin c sin b cos α = sin α sin b sin c
0
0
sin b sin α
2.2
Sphärische Trigonometrie
13
Zyklische Vertauschung von x, y, z ändert die Determinante nicht, bewirkt aber anderseits eine zyklische
Vertauschung von a, b, c bzw. α, β, γ. Somit gilt sin α sin b sin c = sin β sin c sin a = sin γ sin a sin b, und
hieraus folgt der Satz.
Winkelkosinussatz“:
”
Für jedes sphärische Dreieck mit den Stücken a, b, c, α gilt
− cos α = cos β cos γ − sin β sin γ cos a
Beweis:
Übergang zum Polardreieck, Anwendung des Seitenkosinussatzes und Verwendung der Beziehungen
cos(π − ξ) = − cos ξ, sin(π − ξ) = sin ξ.
Mit den Kosinussätzen und dem Sinussatz ist es möglich, aus drei beliebigen Dreiecksstücken ein beliebiges
viertes zu berechnen (wenn ein entsprechendes Dreieck existiert).
2.2.4
Formeln für rechtwinklige sphärische Dreiecke
Für rechtwinklige Dreiecke mit der Hypotenuse c, den Katheten a, b und den ihnen gegenüberliegenden
Winkeln α, β reduzieren sich die Formeln aus 2.2.3 auf Relationen zwischen drei Stücken.
Folgende Fälle sind möglich: Relation zwischen a) drei Seiten,
b) zwei Seiten und einem Winkel,
c) einer Seite und zwei Winkeln.
In den Fällen b) und c) ist noch zu unterscheiden, ob die Seiten Hypotenuse oder Katheten sind und ob die
beiden Winkel (Seiten) dem Winkel (der Seite) anliegen oder nicht. Also gibt es bis auf Umbezeichnung
sechs Möglichkeiten für Formeln, die drei Stücke verknüpfen.
Aufgabe: Man leite diese Formeln aus den Kosinussätzen und dem Sinussatz her.
Lösung:
Nr. Stücke
Formel
Herleitungsweg
1
a, b, c
cos c = cos b cos a
Seitenkosinussatz mit a als Hypotenuse
2
a, b, α tan a = tan α sin b
Seitenkosinussatz mit c als Hypotenuse
3
a, c, α
sin a = sin c sin α
Sinussatz mit c als Hypotenuse
4
a, c, β tan a = tan c cos β
Kombination der Fälle 3.,5.,6.
5
a, α, β cos α = sin β cos a Winkelkosinussatz mit c als Hypotenuse
6
c, α, β cos c = cot α cot β Winkelkosinussatz mit a als Hypotenuse
2.2.5
Das Pentagramma mirificum
Die fünf Stücke eines rechtwinkligen sphärischen Dreiecks sind nicht unabhängig, siehe 2.2.4. Die Eigenschaft von fünf Zahlen (a, b, c, α, β), die Stücke eines rechtwinkligen sphärischen Dreiecks sein, kann als
fünfstellige Relation über R angesehen werden. Es wird gezeigt, wie aus dem Bestehen dieser Relation
für ein Zahlenquintupel auch für weitere Zahlenquintupel diese Relation folgt.
Trivial ist: Sind (a, b, c, α, β) in der Relation, so auch (b, a, c, β, α).
Seien (a, b, c, α, β) in Relation. Das rechtwinklige Dreieck xyz habe diese Stücke, der rechte Winkel liege
bei z.
Zu den drei Großkreisen
ka
kb
kc
:=
:=
:=
Verbindung von y und z
Verbindung von z und x
Verbindung von x und y
werden noch die Polaren
von x und y hinzugenommen, sie seien mit px und py bezeichnet. Diese fünf
Geraden haben 52 = 10 Diametralpunktepaare als Schnittpunkte.
Da die Verbindungsgerade eines Punktes mit einem beliebigen Punkt seiner Polaren immer senkrecht zur
Polaren ist, entstehen an vier Schnittpunktpaaren rechte Schnittwinkel: Zwei an Schnitten der beiden
Großkreise durch x mit px , zwei an den Schnitten der beiden Großkreise durch y mit py .
14
2
SPHÄRISCH-ELLIPTISCHE GEOMETRIE
Die übrigen Schnittpunktpaare enthalten die Dreieckseckpunkte x, y, z (ein rechter Schnittwinkel bei z)
sowie die Eckpunkte des Polardreiecks (xyz)0 , denn :
ka ⊥ py
⇒ py ∩ kb enthält die Pole von ka , x0 ist einer davon.
ka ⊥ kb
kb ⊥ px
⇒ px ∩ ka enthält die Pole von kb , y 0 ist einer davon.
kb ⊥ ka
px ∩ py enthält als Schnitt zweier Polaren die Pole der Verbindungsgeraden der betreffenden Pole, also
die Pole von kc , also z 0 und seinen Diametralpunkt.
Tabelle der Schnittpunkte (p bezeichne den Diametralpunkt von p):
ka
kb
kc
px
py
ka
kb
kc
px
py
−
{z, z}
−
{y, y}
{x, x}
−
{y 0 , y 0 } {z3 , z3 } {z1 , z1 }
−
{z2 , z2 } {x0 , x0 } {z4 , z4 } {z 0 , z 0 } −
Bei den Punkten z, z1 , z2 , z3 , z4 und ihren Diametralpunkten sind rechte Schnittwinkel.
Wählt man aus den Diametralpunktepaaren folgende aus:
Die Eckpunkte x, y, z des Ausgangsdreiecks,
die Ecken x0 , y 0 , z 0 des dazu polaren Dreiecks (xyz)0 ,
die Rechtwinkelscheitel zi aus den Paaren {zi , zi } so, daß (nach evtl. Weglassen des Querstriches) gilt:
_
_
xy + yz1
_
=
_
xx0 + x0 z3
_
_
_
0
_
0
yx + xz4
yy + y z2
=
=
=
π
2
π
2
π
2
π
,
2
dann erhält man die Figur des pentagramma mirificum (von C.F.Gauss so genannt), in der das rechtwinklige Dreieck xyz nunmehr gleichberechtigt neben die vier anderen rechtwinkligen Dreiecke (rechte
Winkel bei z1 , . . . , z4 ) tritt: Zu jedem solchen Dreieck enthält die Figur außer den Trägergeraden der
Dreiecksseiten noch die Polaren zu den Hypotenusenendpunkten.
.....z
..... ......
..... . .....
.............................
.
.
.
.....
b............
.... a
...
.
.
.
...
...
...
...
...
...
...
...
...
.
.
.....................................................................................
.
......................
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
................
.
...
..........
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
...
...................
4 ........... ....
...
...
... ..
...
..
... ....
.
.... ...
.
...
.
........
.....
.
...
...
...
...
...
...
..
.
...
.
.
...
...
..
..
.
...
.
.
.
...
.
.
...
..
.
.
.
... ..
... ..
... ...
... ...
........ 0
0.............
....
.
.........
.
.
.... ........
.
... ...
.
.
.
... ........
.
...
...
.
.....
.
.
.
...
...
.....
...
..
......
...
.....
......
......
...
...
.....
......
.
.
.
...
.
....
.
......
....
.
...
.
.
......
.
.
...
...
......
.
...
.
.
.
.
.
....
....... .......
...
...........
..
...
. .......
.
.
.
.
.
...
.
.......
...
....
.
.
.
0
.
.
.
.
.
.
...
.
........
...
.....
.
.
.
.
.
.
.
.
.
.
.
............
........
....
............
.
.........
.
.
.
... ...... .................
.
......... ...
.......... ....
.... ................
............
...........
x
Ferner bilden von dem inneren“ Fünfeck
”
xyy 0 z 0 x0 je zwei nicht nebeneinanderliegende
Ecken mit der gegenüberliegenden“ Dreiecks”
Rechtwinkelecke ein gleichsseitiges dreirechtwinkliges Dreieck, und je zwei nebeneinanderliegende Ecken ergeben die Polare des ge”
genüberliegenden“ Punktes des Fünfecks.
z .
c
y
. z1
y
x
z
.
z3
0
Für das Dreieck y yz1 gilt dann (vgl. Figur):
_
y 0 y=
π
− a,
2
_
yz1 =
<
) y = β,
π
− c,
2
_
y 0 z1 = π − α −
<
) y0 = π − (
π
π
= −α
2
2
π
π
+ b) = − b.
2
2
.
z2
2.2
Sphärische Trigonometrie
15
Vereinbarung zur Bezeichnung: Im folgenden sei für beliebiges t für den Komplementwinkel
π
2
− t kurz t∗ geschrieben.
Zu dem Dreieck mit den Stücken (a, b, c, α, β) hat man also eines mit den Stücken (α∗ , c∗ , a∗ , β, b∗ ) gefunden, es enthält die Stücke: Komplement des ersten Winkels, Komplement der Hypotenuse, Komplement
der ersten Kathete, zweiter Winkel, Komplement der zweiten Kathete. Die Wiederholung dieser Zuordnung ergibt folgende fünfgliedrige Kette zugeordneter Dreiecke des pentagramma:
(a,
b,
c,
(α∗ , c∗ , a∗ ,
(β ∗ , a, α,
(b,
α∗ , β,
(c∗ , β ∗ , b∗ ,
α, β)
β, b∗ )
b∗ , c)
c, a∗ )
a∗ α)
Diese Kette kann zur abermaligen Herleitung trigonometrischer Gleichungen verwendet werden.
Beispiel:
Formel Nr.6 aus 2.2.4 ergibt für das zweite Dreieck der Kette die Beziehung cos a∗ = cot β cot b∗ bzw.
sin a tan β = tan b, das ist (bis auf die Bezeichnung) Formel Nr.2.
Verfährt man mit den anderen Dreiecken der Kette ebenso, erhält man die
c .
......
..
......
......
erste Nepersche Regel: Man ordne die fünf Stücke c, α, b∗ , a∗ , β zyklisch an
.
.
.
.
.
......
.
......
......
......
......
.
.
.
.
.
.
.
.
(in der entsprechenden Reihenfolge liegen sie auch im Dreieck aneinander).
β..
α
Dann ist der Kosinus jeden Stückes gleich dem Produkt der Kotangenten seiner
...
....
...
..
...
...
anliegenden Stücke.
...
..
.
...
...
...
..
...
..
Wendet man Formel Nr.1 auf die Dreiecke der Kette an, so ergibt sich die
.
.
...
..
∗
∗
zweite Nepersche Regel: Im genannten Zyklus ist der Kosinus jedes Stückes
a .................................... b
gleich dem Produkt der Sinus der nicht anliegenden Stücke.
Aufgabe: Man verifiziere die Neperschen Regeln und leite damit die Formeln Nr.1 bis 5 aus 2.2.4.
erneut ab.
2.2.6
Winkelsumme und Flächeninhalt
Aus den trigonometrischen Formeln kann gefolgert werden:
• Die Summe dreier Seitenlängen eines sphärischen Dreiecks ist kleiner als 2π.
• Es gilt die Dreiecksungleichung.
• Die Summe der Innenwinkel ist größer als π.
Beweis:
Aus dem Seitenkosinussatz folgt wegen sin b > 0 und sin c > 0:
| cos α| =
| cos a − cos b cos c|
<1
sin b sin c
Folglich gilt:
cos a − cos b cos c ≤ | cos a − cos b cos c| < sin b sin c
⇒ cos a < cos(b − c),
− cos a + cos b cos c ≤ | cos a − cos b cos c| < sin b sin c ⇒ cos a > cos(b + c),
also ist
cos(b + c) < cos a < cos(b − c).
Hieraus folgt
a < b + c < 2π − a und a + b + c < 2π.
Durch zyklische Vertauschung von a, b, c erhält man die übrigen Dreiecksungleichungen, und durch Übergang zum Polardreieck erhält man π − α + π − β + π − γ < 2π, also α + β + γ > π.
Geometrische Deutung der Winkelsumme eines sphärischen Dreiecks:
Bei einem zweirechtwinkligen Dreieck (eine Ecke ist Pol des Trägerkreises der gegenüberliegenden Seite)
ist der Flächeninhalt offenbar eine monoton wachsende Funktion der Winkelsumme. Das Flächeninhaltsfunktional F l ist hauptsächlich durch seine Additivität bestimmt: Wird ein Dreieck D in zwei Teildreiecke
D1 und D2 zerlegt, so gilt
F l(D) = F l(D1 ) + F l(D2 )
(1)
16
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Für die Winkelsumme Ws gilt dagegen
Ws(D) = Ws(D1 ) + Ws(D2 ) − π
(2)
Aus diesen beiden Funktionalgleichungen kann unter wenigen zusätzlichen Voraussetzungen gefolgert
werden, daß die Funktionale F l und Ws in linearem Zusammenhang stehen:
Ws = λ · F l + µ
(Ohne Beweis)
Es muß λ (s.obiges Beispiel) positiv sein, o.B.d.A. λ = 1, Ws = F l + µ. Einsetzen in (2) liefert
F l(D) + µ = F l(D1 ) + µ + F l(D2 ) + µ − π,
mit (1) ergibt das
F l(D) + µ = F l(D) + 2µ − π,
also µ = π. Die Zahl α + β + γ − π wird auch sphärischer Exzeß genannt, und man hat nun den
Satz:
Der Flächeninhalt eines sphärischen Dreiecks ist gleich seinem sphärischen Exzeß.
3
Hyperbolische nichteuklidische Geometrie
In 1.3 und 2.1 wurde gezeigt:
Die Negation des euklidischen Parallelenaxioms in dem Sinne, daß sich zwei in derselben Ebene liegende
Geraden immer schneiden, führt im Hinblick auf die Inzidenz auf die projektive Geometrie und – bei
Beschränkung auf diejenigen Kollineationen, die das (durch das euklidische Standard-Skalarprodukt im
R3 erzeugte) Polarsystem invariant lassen – auf die elliptische Geometrie.
Die Negation des euklidischen Parallelenaxioms in dem Sinne, daß es zu einer Geraden durch einen Punkt
außerhalb dieser Geraden mehr als eine die Gerade nicht schneidende gibt, kann bezüglich der Inzidenz
allein schon in der euklidischen Ebene realisiert werden:
Man betrachte als Punktmenge die inneren Punkte eines
Kreises, als Geraden die Strecken, deren Endpunkte auf
..................................
.........
.............
........
.......
.......
......
dem Kreis liegen (Sehnen). Eine Gruppe von Kongruenz.....
......
.
.
.
.
.....
...
.
.
.....
.
”
.
....
....
.
.
.
...
transformationen“ für diese Geometrie aber kann die eu..
.
...
.
...
...
.
..
..
.
..........
klidische bzw. affine Ebene nicht bieten: Es müßte ja der
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
...
........
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
...
.........
.
.
.
.
.
................
.
.
.
.
.
.
.
.
.
...............
.......................
......
Kreis invariant bleiben, und das geht nur mit euklidischen
......... ............................................................................................
...
...
.................................................................................................
...
...............
.
........
.
...............
Kongruenztransformationen; doch diese erlauben es nicht,
.................
..
...............
..
...
...............
.
.
..............
...
.
...
eine Sehne auf eine beliebige andere abzubilden. Am Schluß
..
...
..................
...
.......................
...
.......................
...
von 2.1 wurde gezeigt: Bettet man den Kreis in die projek.......................
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..........................
...
....
....
.....
tive Ebene ein, so findet man eine Untergruppe der Kol.....
.....
.....
.....
.
.
.
.
.
......
......
.......
lineationsgruppe, die den Kreis als Ganzes fest läßt und
......
........
.............
.........
....................................
die folgende für Gruppen von Kongruenztransformationen
wesentliche Eigenschaft hat:
Sind (Pi , si ) (i = 1, 2) zwei Paare von Punkt und Sehne durch den Punkt, so gibt es genau vier Transformationen in der Untergruppe die (P1 , s1 ) auf (P2 , s2 ) abbildet. Die Rechnungen dazu wurden am Ende
des Abschnittes 2.1 (Exkurs über einen projektiven Zugang zur hyperbolischen Geometrie) durchgeführt.
Damit ist ein Existenzbeweis für eine nichteuklidische sog. hyperbolische Geometrie erbracht. Da die betreffenden Kollineationen der Anschauung zunächst nicht so zugänglich sind wie im Falle der elliptischen
Geometrie (dort waren es im wesentlichen Kongruenztransformationen des R3 , die eine Kugel fest lassen),
wird dieser Weg hier nicht weiter verfolgt, sondern die hyperbolische Geometrie wird von den Grundlagen
her so aufgebaut, wie es auch ihre Entdecker Bolyai, Lobatschewski und Gauss getan haben.
Bei diesem Aufbau ist es zweckmäßig, sich zunächst klar zu machen, welche von der euklidischen Geometrie her bekannten Sachverhalte auch in der hyperbolischen Geometrie richtig sind und welche nicht. Der
den beiden Geometrien gemeinsame Grundstock ist die absolute (d.h.: vom Parallelenaxiome unabhängige, losgelöste) Geometrie. Sie wird im folgenden kurz referiert.
3.1
Absolute Geometrie
3.1
17
Absolute Geometrie
Absolute Geometrie ist, kurz formuliert, Geometrie ohne Parallelenaxiom und dessen Folgerungen. Je
nachdem, welches Parallelenaxiom der absoluten Geometrie hinzugefügt wird, entsteht die euklidische
oder eine nichteuklidische Geometrie.
3.1.1
Absolute Geometrie der Ebene
Die ebene absolute Geometrie kann definiert werden als ein Quadrupel (P, G, Z, B), in dem P eine nicht
leere Menge ist, deren Elemente Punkte heißen, G ein System von Teilmengen von P ist, dessen Elemente
Geraden heißen, Z eine dreistellige Relation auf der Menge P ist, die Zwischenrelation genannt wird,
und B ist eine Gruppe von bijektiven Abbildungen von P auf sich, die Bewegungen genannt werden,
derart, daß die im folgenden formulierten dreizehn Axiome gelten. Diese Axiome werden ihrem Inhalt
nach zweckmäßig in vier Gruppen (im folgenden a) bis d)) eingeteilt.
Gruppe I: Axiome der Inzidenz
(1) Es gibt mindestens zwei Punkte, und jede Gerade enthält mindestens zwei Punkte, aber keine
Gerade enthält alle Punkte.
(2) Zu zwei verschiedenen Punkten gibt es genau eine Gerade, die die beiden Punkte enthält.
Punkte werden kollinear genannt, wenn sie zu ein und derselben Geraden gehören. g(AB) bezeichne die
nach Axiom (2) existierende und eindeutig bestimmte Gerade, die A und B enthält, sie wird Verbindungsgerade genannt.
Gruppe II: Axiome der Anordnung
Das Bestehen der Zwischenrelation für drei Punkte X, Y, Z werde mit Zw(XY Z) bezeichnet.
(3) Aus Zw(XY Z) folgt, daß X, Y, Z drei paarweise verschiedene kollineare Punkte sind.
(4) Aus Zw(XY Z) folgt, daß Zw(ZY X) gilt und daß Zw(Y XZ) nicht gilt.
(5) Aus Zw(XY Z) und T ∈ g(XY ), T 6= Y , folgt, daß Zw(T Y Z) oder Zw(XY T ) gilt.
(6) Sind X, Y, Z drei paarweise verschiedene kollineare Punkte, so gilt Zw(XY Z) oder Zw(Y ZX) oder
Zw(ZXY ).
(7) Zu zwei Punkten X, Y gibt es mindestens einen Punkt W mit Zw(XY W ) und mindestens einen
Punkt Z mit Zw(XZY ).
(8) (Axiom von Pasch) Sind A, B, C nicht kollineare Punkte, g ein Gerade, die weder A noch B noch
C enthält, aber einen Punkt Z mit Zw(AZB), so enthält g einen Punkt X mit Zw(BXC) oder
mit Zw(AXC).
Hieraus kann gefolgert werden:
Satz (Halbgeradenzerlegung):
Ist g eine Gerade, A ein Punkt von g, so gibt es eine Zerlegung von g \ {A} in zwei Teilmengen derart,
daß zwei Punkte X und Y genau dann zu verschiedenen Teilmengen gehören, wenn Zw(XAY ) gilt.
Die in diesem Satz genannten Teilmengen werden Halbgeraden oder auch Strahlen mit dem Anfangspunkt A genannt, der Anfangspunkt wird meist als zu den Halbgeraden gehörend definiert. Bezeichungen:
AP + , AP − .
Satz (Halbebenenzerlegung):
Ist g eine Gerade, so gibt es eine Zerlegung der nicht zu g gehörenden Punkte in zwei Teilmengen derart,
daß zwei Punkte X und Y genau dann in verschiedenen Teilmengen liegen, wenn es einen Punkt P auf
g gibt, für den Zw(XP Y ) gilt.
Dies beiden Teilmengen werden offene Halbebenen mit der Begrenzungsgerade g genannt. Fügt man
g zu einer der offenen Halbebenen hinzu, so heißt diese Punktmenge eine abgeschlossene Halbebene.
18
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Bezeichnungen: XY Z + , XY Z − . Die Vereinigungsmenge einer offenen Halbebene mit einem auf ihrer
Begrenzungsgerade liegenden Halbgeraden und dessen Anfangspunkt heißt Semi-Ebene (auch: Orientierungsfigur oder Flag oder Fahne). Bezeichnungen: XY + Z + , XY − Z + usw.
Sind A, B zwei verschiedene Punkte, so heißt die Menge AB := {X : Zw(AXB) ∪ {A} ∪ {B}} die Strecke
mit den Endpunkten A und B.
Gruppe III: Axiome der Bewegung
(9) Für jede Bewegung α folgt aus Zw(ABC) auch Zw(α(A)α(B)α(C)).
(10) Sind F, F 0 zwei Semi-Ebenen, so gibt es genau eine Bewegung, bei der F 0 die Bildmenge von F ist.
(11) Sind h, k zwei Halbgeraden mit gemeinsamem Anfangspunkt, so gibt es eine Bewegung, bei der h
die Bildmenge von k und gleichzeitig k die Bildmenge von h ist.
Auf dem Begriff der Bewegung beruht der Begriff der Kongruenz: Zwei Punktmengen F, F 0 (geometrische
Figuren) heißen kongruent, wenn es eine Bewegung gibt, bei der F 0 die Bildmenge von F ist. Schreibweise:
F ∼
= F 0 . Auf Grund der Gruppeneigenschaften der Bewegungen ist die Kongruenz eine Äquivalenzrelation
in der Menge aller geometrischen Figuren.
Gruppe IV: Axiome der Stetigkeit und Vollständigkeit
(12) (Archimedisches Axiom) Sind AB, CD zwei Strecken, so gibt es eine natürliche Zahl n ≥ 1 und
Punkte A0 , A1 , ...., An mit A0 = A, mit Zw(Ai−1 Ai Ai+1 ) für i = 1, ..., n, mit Ai Ai+1 ∼
= CD für
i = 0, 1, ...., n − 1, und es gilt Zw(ABAn ), aber nicht Zw(ABAn−1 ).
(13) (Dedekindsches Schnittaxiom) Ist eine Gerade g so in zwei nichtleere disjunkte Teilmengen u und
v zerlegt, so daß gilt: Kein Punkt von u liegt zwischen zwei Punkten von v und kein Punkt von v
liegt zwischen zwei Punkten von u, dann existiert genau ein Punkt Z ∈ g, so daß für alle Punkte
U von u und alle Punkte V von v mit U, V 6= Z gilt: Zw(U ZV ).
Aus diesen Axiomen können viele (aber nicht alle) von der euklidischen Geometrie her bekannten Sachverhalte hergeleitet weren, diese gelten dann auch in der nichteuklidischen Geometrie. Die für das folgende
wichtigsten seien hier aufgezählt (ohne Beweise).
Sachverhalte zur Inzidenz (Axiomgruppe I):
Der Durchschnitt zweier Geraden ist entweder leer oder genau ein Punkt, oder die Geraden sind gleich.
Sachverhalte zur Anordnung (Axiomgruppen I und II):
Über die im Anschluß an Axiom (8) genannten Sätze und Begriffe hinaus ist noch wichtig:
• Es gibt zwei Sorten von Semi-Ebenen - die beiden Orientierungsklassen; hierauf beruht der Begriff
der Gleichorientierung.
• Die Begriffe Winkel, Dreieck, Polygon (als Punktmengen) können wie üblich definiert werden. (Winkel werden hier definiert als Durchschnitt zweier abgeschlossener Halbebenen, die sich in einem
Punkt schneidende Begrenzungsgeraden haben.) Ferner: Scheitelwinkel, Nebenwinkel, bei Dreiecken:
Innen- und Außenwinkel.
• Die Menge aller auf einer festen Geraden g liegenden Halbgeraden zerfällt in zwei Sorten, die man
die beiden Enden von g nennt: Zwei auf g liegende Halbgeraden s und t gehören genau dann zum
gleichen Ende, wenn s ⊆ t oder t ⊆ s gilt; ein Ende einer Geraden kann also als eine Äquivalenzklasse
von Halbgeraden definiert werden.
Sachverhalte zu Bewegungen und zur Kongruenz (Axiomgruppen I, II, III):
• Es gibt gleich- und ungleichsinnige Bewegungen.
• Zu speziellen Lagen zweier gegebener Semi-Ebenen als Original- und Bildmenge, die gemäß Axiom
(10) eine Bewegung festlegen, ergeben sich spezielle Typen von Bewegungen: Geradenspiegelungen (Original- und Bild-Semi-Ebene haben gleiche Randhalbgeraden und entgegengesetzte Halbebenen), Drehungen (Original- und Bild-Semi-Ebene haben den gleichen Anfangspunkt und sind
3.1
Absolute Geometrie
19
gleichorientiert), Verschiebung längs einer Geraden (die Randhalbgeraden der beiden Semi-Ebenen
sind kollinear und gehören zum gleichen Ende, und die beiden Halbebenen sind gleich). Zu zwei
Punkten gibt es mindestens eine Verschiebung, bei der der eine auf den anderen abgebildet wird.
(Über die Einzigkeit entscheidet dann das Parallelenaxiom: Bei euklidischem Parallelenaxiom gibt
es genau eine, bei hyperbolischem Parallelenaxiom aber nur bei Zusatzforderungen hinsichtlich der
Geraden, längs der die Verschiebung erfolgen soll.)
• Das Senkrechtsein von Geraden kann mittels Geradenspiegelung definiert werden. Es gelten die
üblichen Existenz- und Einzigkeitssätze über Senkrechte (Lote). Symmetrie wird mittels Geradenspiegelungen definiert.
• Strecken und Winkel können ohne Verwendung eines Zahlbegriffes allein mittels Kongruenz- und
Anordnungsbeziehungen durch die Relation größer als verglichen werden.
• Es gelten folgende Kongruenzsätze über Dreiecke: sws, wsS, wsw, wws, sss, ferner die bekannten
Sätze über gleichschenklige Dreiecke.
• Es gilt der Satz vom Außenwinkel für Dreiecke in der Form, daß jeder Außenwinkel größer als jeder
nicht anliegende Innenwinkel ist. Ferner gilt: Im Dreieck liegt der größeren Seite der größere Winkel
gegenüber.
• Es gelten der Satz vom Höhenschnittpunkt, vom vom In- und vom Umkreismittelpunkt in dem
Sinne, daß, wenn sich zwei Höhen (bzw. Winkelhalbierende bzw. Seitenmittelsenkrechte) schneiden,
auch die dritte Höhe (bzw. Winkelhalbierende bzw. Seitenmittelsenkrechte) durch diesen Schnittpunkt geht.
Messung (Axiomgruppe IV):
Strecken, Winkel und Flächen können mit positiven reellen Zahlen (wie im euklidischen üblich) gemessen
werden. Winkel können in spitze, rechte und stumpfe eingeteilt werden. Der Abstand eines Punktes von
einer Geraden wird als Länge der Strecke Punkt-Lotfußpunkt definiert.
Was in der absoluten Geometrie nicht gilt:
Folgende Begriffe, Sachverhalte und Sätze stehen nicht zur Verfügung – sie sind wesentlich vom Parallelenaxiom abhängig und gelten nur unter der Voraussetzung des euklidischen Parallelenaxioms, in der
hyperbolischen Geometrie sind sie im allgemeinen falsch – :
• Der Parallelenbegriff im euklidischen Sinne,
• Sätze über Winkel an geschnittenen Parallelen,
• Translationen, Vektoren,
• die Innenwinkelsumme im Dreieck ist 180o ,
• Ähnlichkeitslehre (Strahlensätze, Ähnlichkeitssätze),
• Satz des Pythagoras,
• Satz des Thales, Peripheriewinkelsatz, Sehnen- und Sekantensatz,
• Gerade als Menge der Punkte konstanten Abstandes von einer anderen Geraden.
3.1.2
Absolute Geometrie des dreidimensionalen Raumes
Der absolute Raum ist ein Quintupel (P, G, E, Z, B), dabei haben P, G, Z und B dieselbe Bedeutung
wie in 1.1, und es ist E ein weiteres System von Teilmengen von P, dessen Elemente Ebenen genannt
werden, und es gelten die im folgenden aufgelisteten 16 Axiome (R1) bis (R16) (von denen einige mit den
Axiomen aus 3.1.1 übereinstimmen).
Punkte, die in ein und derselben Ebene enthalten sind, werden komplanar genannt.
20
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
(R1) Es gibt mindestens drei Punkte, jede Gerade enthält mindestens zwei Punkte, und keine Ebene
enthält alle Punkte.
(R2) = (2) aus 3.1.1
(R3) Zu drei nicht kollinearen Punkten gibt es genau eine Ebene, die diese Punkte enthält.
Bezeichnung: (ABC).
(R4) Der Durchschnitt einer Geraden mit einer Ebene ist entweder leer oder ein Punkt oder die Gerade
selbst.
(R5) Der Durchschnitt zweier Ebenen ist entweder leer oder eine Gerade, oder die Ebenen sind gleich.
(R6) bis (R10): Wie (3) bis (7) aus 3.1.1
(R11) (Axiom von Pasch) Sind A, B, C drei nicht kollineare Punkte, g eine in (ABC) gelegene Gerade,
die weder A noch B noch C enthält, aber einen Punkt Z mit Zw(AZB), so enthält g einen Punkt
X mit Zw(BXC) oder Zw(AXC).
Die Begriffe Halbgerade, Strecke, Halbebene usw. werden nun wie in der Ebene eingeführt. Dazu kommen
die Begriffe offener und abgeschlossener Halbraum sowie Semiraum (auch: Räumliche Orientierungsfigur
oder Flagge): Dieser ist die Vereinigungsmenge einer Semi-Ebene mit einem der beiden von der Trägerebene dieser Semi-Ebene erzeugten offenen Halbräume.
(R12) = (9) aus 3.1.1
(R13) Sind S, S 0 zwei Semiräume, so gibt es genau eine Bewegung, bei der S 0 die Bildmenge von S ist.
(R14) = (11) aus 3.1.1
(R15) = (12) aus 3.1.1
(R16) = (13) aus 3.1.1
Hieraus sind die in der absoluten Geometrie der Ebene schon angebenen Sachverhalte herleitbar. Ferner:
Das Senkrechtsein von Geraden und Ebenen und entsprechende Existenz- und Einzigkeitsätze. An räumlichen Bewegungen gibt es jedenfalls: Verschiebungen längs einer Geraden, Drehungen um eine Gerade
(Achse), Ebenenspiegelungen, dazu die entsprechenden Existenz- und Einzigkeitssätze.
3.2
3.2.1
Hyperbolische Geometrie der Ebene
Das hyperbolische Parallelenaxiom, der Begriff der hyperbolischen nichteuklidischen
Parallelen, Parallelwinkel und Paralleldistanz
Satz (zur absoluten Geometrie gehörend):
Ist g eine Gerade, P ein nicht zu g gehörender Punkt, so existiert eine Gerade h durch P , die g nicht
schneidet.
Beweis: l := Lot zu g durch P , h := Lot zu l durch P . Wäre h ∩ g ein Punkt S, so wäre im Dreieck
F P S ein Außenwinkel einem nicht anliegenden Innenwinkel kongruent, im Widerspruch zum Satz vom
Außenwinkel.
Folgerung: Zwei verschiedene Geraden, die ein gemeinsames Lot haben, schneiden sich nicht.
Hyperbolisches Parallelenaxiom:
Ist g eine Gerade, P ein nicht zu g gehörender Punkt, so gibt es mehr als eine Gerade, die
P enthält und g nicht schneidet.
Definition der hyperbolischen nichteuklidischen Ebene:
Die hyperbolische nichteuklidische Ebene ist ein System (P, G, Z, B) von Punkten, Geraden, Zwischenrelation, Bewegungen, das den Axiomen der absoluten Geometrie der Ebene (Axiome (1) bis
(13)) und dem hyperbolischen Parallelenaxiom genügt.
3.2
Hyperbolische Geometrie der Ebene
21
Zur Definition der hyperbolischen Parallelen:
Ist g eine Gerade, P ein nicht zu g gehörender Punkt, so zerfällt die Menge aller Geraden durch P in
zwei Sorten: Solche, die g schneiden und solche, die g nicht schneiden. Als die hyperbolischen Parallelen
zu g durch P werden diejenigen beiden Geraden definiert werden, die diese beiden Sorten in bestimmter
Weise voneinander trennen:
Es sei F der Fußpunkt des Lotes von P auf g und
...
...
Q sei ein Punkt 6= P auf dem Lot zur Geraden P F ,
...
...
...
...
.
...
.
ferner sei R der Fußpunkt des Lotes von Q auf g. Aus
Q
................ ... P
.
.....................................................................................................................................................................................................
................
.......
.
.
.
.
....
dem hyperbolischen Parallelenaxiom folgt, daß es auf
.
.
................
................
...
....
................
.
................
...
................ .... S
der Strecke QR einen Punkt S 6= Q gibt, so daß die
...
................
.. ..................
...
.
...
.
Halbgerade P S + die Gerade g nicht schneidet, und
...
....
...
...
...
...
+
für alle X mit Zx(SXQ) schneidet P X die Gerade
... Z
...
...
...
...
...
g ebenfalls nicht. Somit ist
...
...
...
...
...
...
+
−
u := {X ∈ [QR] : P X ∩ g = ∅} ∪ QR
...
...
...
...
.
.......
.
+
−
R
....... F
..
v := {Y ∈ [QR] :
P Y ∩ g 6= ∅} ∪ RQ eine
.
...................................................................................................................................................................................... g
....
....
Dedekindsche Zerlegung der Geraden g(QR). Nach
...
...
...
...
...
...
dem Dedekindschen Schnittaxiom existiert genau ein
Punkt Z mit Zw(U ZV ) für alle U ∈ u, V ∈ v.
Er trennt“ in der Menge der in <
) F P Q liegenden Halbgeraden mit Anfangspunkt P die g schneidenden
”
von den g nicht schneidenden: Halbgeraden mit Anfangspunkt P , die in <
) F P Z liegen, schneiden g,
und solche, die in <
) ZP Q liegen, schneiden g nicht. P Z + selbst schneidet g nicht. Die Trägergerade der
Halbgeraden P Z + definiert man als die eine der beiden hyperbolischen Parallelen zu g durch P , die
andere ergibt sich durch Spiegelung an der Geraden g(P F ).
Definition der hyperbolischen nichteuklidischen Parallelen:
Es sei g eine Gerade, P ein Punkt, P ∈
/ g, e ein Ende von g.
Die Gerade p ist Parallele durch P zu g nach dem Ende e hin
:⇐⇒ Ist F der Fußpunkt des Lotes von P auf g und H diejenige offene Halbebene
bezüglich der Geraden g(P F ), in der Halbgeraden des Endes e enthalten sind,
so hat die in H gelegene Halbgerade s auf p mit Anfangspunkt P folgende
Eigenschaft: Eine beliebige in H liegende Halbgerade mit Anfangspunkt P
schneidet g dann und nur dann, wenn sie im Inneren des von s und P F +
gebildeten Winkels liegt.
Folgerungen:
1) Zu einer Geraden mit gegebenem Ende und einem nicht auf der Geraden liegenden Punkt gibt es
genau eine Parallele durch den Punkt zur gegebenen Geraden zum gegebenen Ende.
2) Zu einer Geraden g gibt es durch einen nicht zu ihr gehörenden Punkt genau zwei Parallelen (zu
jedem Ende hin eine), sie schneiden die Gerade g nicht.
3) Die Eigenschaft der Parallelität ist gegen Anwendung von Bewegungen invariant.
Begriffe Parallelwinkel und Paralleldistanz
Aus Folgerung 3) ergibt sich: Gibt man eine positive reelle Zahl d vor, wählt eine Strecke P F mit der
Länge d und eine auf P F senkrechte Gerade g durch F sowie einen zu g parallelen Strahl s mit dem
Anfangspunkt P , so hat der Winkel <
) (s, P F + ) eine nur von der Zahl d, nicht von der Wahl von P und
F abhängige Größe α. Man bezeichnet die Zahl α mit Π(d) und nennt sie Parallelwinkel zu d; umgekehrt
heißt d die zur Winkelgröße α gehörende Paralleldistanz d = ∆(α).
....
...
...
...................
.
...
....................................
................................
... .......
......................
.............
...
...
...
...
...
...........
. .
..........................................................................................................................................................................
P
d
g
F
α
}
α = Π(d)
d = ∆(α)
22
3
3.2.2
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Eigenschaften der Parallelität, Lage zweier Geraden zueinander
Hilfssatz
Ist p Parallele durch P zu g zum Ende e, Q ein Punkt von p, so ist p auch Parallele
durch Q zu g zum Ende e.
Zum Beweis: Fall 1: Q ∈ P e+ , Fall 2: Q ∈ P e− , Halbgerade im fraglichen Winkelbereich
betrachten, im Fall 1 einen Punkt auf ihr, im Fall 2 einen Punkt auf der dazu
entgegengesetzten Halbgeraden mit P verbinden und mittels Axiom von Pasch
(Axiom (8) aus 3.1.1) zeigen, daß die Halbgerade g schneidet.
Folgerungen:
1) die Sprechweise p ist Parallele zu g zum Ende e“ ist sinnvoll, d.h., der Zusatz durch P“ kann auch
”
”
weggelassen werden.
Schreibweise: p k g zum Ende e, oder: p ke g.
2) Parallele Geraden haben kein gemeinsames Lot.
Durch Definition legt man fest, daß jede Gerade zu sich selbst (nach ihren beiden Enden) parallel ist.
Dann kann man formulieren:
Satz: Die Parallelität nach einem Ende ist eine Äquivalenzrelation.
Beweis:
Symmetrie: Sei p ke g. Es genügt, für das Geradenpaar p, g eine Symmetrieachse zu finden, so daß bei
Spiegelung an dieser Achse g und p vertauscht werden. Sei P ∈ p, G ∈ g, w1 bzw. w2 die den Winkel
<
) (P e+ , P G+ ) bzw. <
) (Ge+ , GP + ) halbierende Halbgerade. Wegen p ke g schneidet w1 die Gerade g,
also schneiden sich w1 und w2 in S. Die Lotfußpunkte von S auf g, g(P G), p seien F1 , F2 , F3 . Es ist
|SF1 | = |SF2 | = |SF3 |. Ist w die Winkelhalbierende von <
) (SF1 , SF3 ), so geht bei Geradenspiegelung an
w die Gerade g in p über.
Transitivität: Sei a ke b und b ke c.
a ................................................................................................................................................................................................. ..........
... ......
...
......
...
...
Fall 1: a und c auf derselben Seite bezüglich b und o.B.d.A. b
......
...
......
.....
..
......
.
und c auf derselben Seite von a.
c ................................................................................................................................................................................................. .......
...
......
......
.......
a schneidet c nicht, denn andernfalls müßte wegen b ke c die
......
......
...
......
...
......
...
......
Gerade a auch b schneiden, im Widerspruch zu a ke b; und
...
......
......
...
......
...
......
jede Halbgerade mit Anfangspunkt auf a im fraglichen Win...
......
.
......
................................................................................................................................................................................. .......
kelbereich schneidet wegen a ke b die Gerade b, also erst recht b
c.
a ............................................................................................................................................................................................. ..........
Fall 2: a und c auf verschiedenen Seiten bezüglich b.
a schneidet c nicht, und jede Halbgerade mit Anfangspunkt auf
a im fraglichen Winkelbereich schneidet wegen a ke b auch b
und dann wegen b ke c auch c.
b
c
......
......
......
......
......
......
......
......
......
......
......
......
...
........................................................................................................................................................................................
......
......
......
......
......
......
.
....................................................................................................................................................................................
Hilfssatz über Geraden mit kongruenten Wechselwinkeln:
(Dieser Satz gehört zur absoluten Geometrie)
Zwei Geraden a, b mögen von einer Geraden t so geschnitten werden, daß die Summe
der beiden “inneren“, auf derselben Seite von t liegenden Schnittwinkel gleich π wird.
Dann haben a und b ein gemeinsames Lot.
Beweis:
...
...
...
...
...
...
...
.....
....
...
...
...
...
...
...
...
...
....
3.2
Hyperbolische Geometrie der Ebene
23
A := a ∩ t, B := b ∩ t,
M : Mittelpunkt von [AB],
F : Lotfußpunkt von M auf a,
G auf b ∩ tF − so, daß |AF | = |BG|.
Kongruenzsatz sww in den Dreiecken M AF und M BG liefert
) M F A =<
) M GB,
|M G| = |M F | und <
) AM F =<
) BM G und π2 =<
also sind F, M, G kollinear, und g(F G) ist gemeinsames Lot von a
und b.
a
..
.....
.....
.....
.....
.....................................................................................................................................................................
........
.....
.
.....
....
.....
.....
....
.....
.
.
...
.
.
....
...
.....
... ..........
... .......
.
.
.
.
.
.
.
.......
..... ..
..... ....
.....
...
.....
.
.
...
.
.
..
...
.....
.....
.
...
.
.
.
...
...
.
.
.
.
..
....
.
.
.
.
......................................................................................................................................................
..
.
.
.
.
....
.
.
.
.
.....
.....
.....
.....
.....
F
β
A
α
M
b
B
β
G
t
Hilfssatz über symmetrische Vierecke:
Hat ein Viereck zwei kongruente gegenüberliegende Seiten und bilden diese mit einer
dritten Seite je einen rechten Winkel, dann sind die übrigen Innenwinkel des Vierecks
spitz.
Beweis:
Sei ABC + = ABD+ , |AC| = |BD|,
g(AB) ⊥ g(AC), g(AB) ⊥ g(BD). Spiegelung an der Mittelsenkrechten von [AB] ergibt <
) ACD ∼
) ABD.
=<
Sei p die Parallele zu AB + durch C, q die
Parallele zu AB + durch D, e das Ende, zu
dem AB + gehört.
α :=<
) (CA+ , Ce+ ), β :=<
) (Ce+ , CD+ ),
+
+
γ :=<
) (DC , DB ).
C......................................................................................................................................D
.............
.................
............
. ....
...
............
............ β
γ ........ α...........................
... α
...........
..
.......
............
...
.......
............
....
...
.......
............
...
...
.....
............
..
............
...
............
.
...
...............
.............
...
... ...............
...
............
...
...
............
...
..........
...
...
...
...
...
...
...
...
..
..
.........
........
.........................................................................................................................................................................................................................................
=
=
A
B
.....
...
...
...
...
...
...
.......
...
...
...
...
.
....
Es folgt <
) (DB + , De+ ) = Π(|DB|) = Π(|CA|) = α. Wegen p ke q haben p und q kein gemeinsames Lot,
also ist nach dem Hilfssatz über Wechselwinkel β + γ + α < π. Wegen der Symmetrie des Vierecks ist
aber α + β = γ, also 2γ < π, γ < π2 .
Satz über die Winkelsumme im Dreieck:
In jedem Dreieck ist die Summe der Innenwinkel kleiner als π.
Beweis:
Sei [AB] die längste Seite im Dreieck ABC. Die Lote von A, B, C auf die Verbindungsgerade der Mittelpunkte von [AC] und [BC] mögen die Lotfußpunkte
FA , FB , FC haben. Es ist |AFA | = |CFC | = |BFB |, also
ist das Viereck symmetrisch mit rechten Winkeln bei
FA , FB . Nach dem vorigen Hilfssatz ist sind die Winkel <
) (AFA+ , AB + ) und <
) (BFB+ , BA+ ) spitz, und ihre
Summe ist zugleich die Winkelsumme des Dreiecks.
C
.......
..... .....
... ... .....
... .. .........
.....
... ....
.
.
.....
.
.....
.....
...
.....
...
....
.....
...
.
.
.....
.
.........
..
...
.
.
.
.........................A
...........................................................................................................................................................B
........
.....
.
.......
.
.........
.
.....
...
..
.
.....
.
....
C
...
.....
..
.
.
.
.
...
.....
..
.....
...
....
...
.....
... .....
..... ....
..... ..
... ....
..... ..
.......
......................................................................................................................................................
=
∼
F
=
A
F
F
∼
B
Eine unmittelbare Folgerung ist der
Satz über dreirechtwinklige Vierecke:
Hat ein Viereck drei rechte Innenwinkel, so ist der vierte Innenwinkel spitz.
Folgerung: Zwei Geraden haben höchstens ein gemeinsames Lot.
Eigenschaften der Parallelwinkelfunktion:
Hilfssatz: Die Funktion Π ist streng monoton fallend.
Beweis: Würde für d1 < d2 gelten Π(d1 ) = Π(d2 ), so ergäbe sich nach dem Hilfssatz über Geraden
mit kongruenten Wechselwinkeln, daß zwei Parallelen ein gemeinsames Lot hätten, was nicht sein kann.
Hieraus folgt auch die Unmöglichkeit von d1 < d2 mit Π(d1 ) < Π(d2 )
24
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Hilfssatz:
Es gilt
lim Π(d) =
d→0
π
2
und
lim Π(d) = 0.
d→∞
Beweis: Die Existenz der Limites folgt aus der Monotonie und Beschränktheit der Parallelwinkelfunktion.
Wäre lim Π(d) = ω0 < π2 , dann hätte in einem rechtwinkligen Dreieck mit einem Winkel ω0 die anliegende
d→0
Kathete einen Parallelwinkel, der größer als ω0 ist.
Angenommen, es sei lim Π(d) = ω∞ > 0.
d→∞
Da ω∞ größte untere Schranke ist, existiert
ein ω im Wertebereich mit
ω∞ < ω <
5
ω∞ .
4
Da π2 kleinste obere Schranke ist, existiert
ein ξ im Wertebereich mit
π ω∞
π ω∞
−
<ξ< −
.
2
2
2
3
Q
.
.........
....... ..........
.......
...
.......
.
.
.
.
...
.
.
..
...
.......
.......
.
.
.
.
.
....
.
.....
.
.
.... ..
.
.
.
.
.
. .....
.....
.
.
.
.
.
.
.
.
... ..................
.....
.
.
.
.
.
.
.
......... ..... .......
......
......... .... .... ..............
.......
............
.......
.. ...
........
......... .............
.......
.
.
.
.
.
.
.
.
.
.
.
.
.. ... ........ ...............
.
.
............
.
........
.........
... .......
........................ .......................
.........
..........
........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.........
....
...
....... ....
..........
..............
......
...
...
............
.............
.
.
.
.
.
.
.
.
.
.
............
.
.
.
.
.
...
...
.
........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.....
.
.......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... ..........
...
...
....
...
...
...
...
..
...
..
... ................................................................................................................................................................................................................................................................
...
.....
ωP
ξ ξ
R
S
Man lege Winkel ω, ξ aneinander, trage wie
in der Figur ξ nach der anderen Seite ab
und betrachte die Parallelen wie in der Figur. Es wird
ω + 2ξ > ω∞ + π − ω∞ = π; also existiert der Schnittpunkt S. Die Winkelsumme im Dreieck P SR ist
kleiner als π, also
π
π−ω−ξ+ +<
) P SR < π.
2
Es folgt
π
5
π ω∞
π
15 − 4
11
<
) P SR < ω + ξ − < ω∞ + −
− =
ω∞ =
ω∞ .
2
4
2
3
2
12
12
Aber <
) P SR ist Parallelwinkel zu |QS| und kleiner als ω∞ im Widerspruch dazu, daß ω∞ größte untere
Schranke ist. Also ist die Annahme ω∞ > 0 falsch, es ist ω∞ = 0.
Hilfssatz über den Höhenschnittpunkt:
(Dieser Satz gehört absoluten Geometrie)
Wenn sich zwei Höhen eines Dreiecks schneiden, dann geht auch die dritte Höhe durch diesen Schnittpunkt.
(Beweis als Übungsaufgabe.)
Hilfssatz:
Es seien a und b zum Ende e parallele Geraden, A ∈ a, B ∈ b, A0 Lotfußpunkt von B auf a, B 0 Lotfußpunkt
von A auf b, und AB 0+ ∩ BA0+ sei ein Punkt S. Ist dann l das Lot von S auf g(AB), so ist auch l parallel
zu a zum Ende e.
Beweis:
Wenn l nicht zu a, b parallel ist, dann l schneidet es jedenfalls a oder b, da es im Winkelbereich der
Schneidenden liegt. Sei o.B.d.A. l ∩ a =: T . Im Dreieck ABT ist l und g(BB 0 ) Höhe, S der Schnittpunkt.
Nach dem vorigen Hilfssatz ist g(AS) die dritte Höhe, der Fußpunkte sei Q. Das Dreieck BA0 Q hat dann
zwei rechte Innenwinkel, was nicht sein kann.
Hilfssatz:
Die Abbildung Π : d 7→ Π(d) ist surjektiv.
Beweis:
Sei α ∈]0, π2 [ gegeben. Gesucht ist d mit Π(d) = α.
Wegen lim Π(d) = 0 gibt es α0 mit α0 < α, das im Wertebereich enthalten ist, d.h., es existieren Punkte
d→∞
3.2
Hyperbolische Geometrie der Ebene
25
P, F mit Π(|P F |) = α0 . Es sei s eine Halbgerade mit <
) (P F + , s) = α, Q ein Punkt ∈ F P − , R ∈ s der
Fußpunkt des Lotes von Q auf s. Die Halbgerade t habe den Anfangspunkt Q und sei parallel zu s. Das
Lot von P auf t habe den Fußpunkt T , QR+ ∩ P T + = S. Auf die Parallelen s, t und die Lote P T + , QR+
kann der vorige Hilfssatz angewendet werden, es wird danach das Lot von S auf g(P Q( parallel zu s und
t. Ist G der Lotfußpunkt von S auf g(P F ), so wird α = Π(|P G|).
Aus den letzten Hilfssätzen folgt der
Satz über die Parallelwinkelfunktion:
Die Parallelwinkelfunktion Π hat folgende Eigenschaften:
• Der Definitionsbereich ist das offene Intervall ]0, ∞[.
• Der Wertebereich ist das offene Intervall ]0, π2 [.
• Π ist streng monoton fallend.
• Π ist stetig.
• lim Π(d) =
d→0
π
2
und lim Π(d) = 0.
d→∞
Satz über Abstände zwischen schneidenden Geraden:
..
.....
.....
.....
.....
.
.
.
.
.....
.....
.....
.....
.....
.
.
.
.....
.....
.......... .....
..... ... .....
..... ......... ....
.
.
.
....
...
....
..... ...
.....
....
..... ......... ...
...
.....
.
...
..... .........
...
.
.
.
.
.
.
.
.
...
..
.................. .........
.
.
...
.
.
.
.
.
.....
.
.
...
.
.
.
.
.
.
.
...
.
.
.
.
...
...
.
.
.
.
.
....
.
.
.
.
.
.
.... ........
.
.
.
.
.
......
.
..
...
.
.
.
.
.
.
.
..
.
.
.
.
...
...
.
.
.
.
.
.
.
.
.
.
.
.
...
...
.....
....
..... .........
.
...
.....
...
..... .........
...
...
.....
.
...
...
........ .........
..
.........
.... .....
.............................................................................................................................................................................................................
.
.
.
.
.
....
.
.
.
....
.....
.....
.....
.....
x
Die in der Figur definierte Funktion f ist
streng monoton wachsend, und es gilt
f (x)
lim f (x) = ∞.
x→∞
Zum Beweis:
Die Monotonie folgt aus dem leicht zu beweisenden Hilfssatz: In einem Viereck mit zwei an derselben
Seite anliegenden rechten Winkeln liegt von den beiden anderen Winkeln der kleinere an der größeren
Seite an. Um zu zeigen, daß beliebig große Abstände zwischen beiden Geraden existieren, trage man auf
der einen Geraden vom Schnittpunkt aus die Paralleldistanz des Schnittwinkels ab, errichte im Endpunkt
die Senkrechte (Parallele zur anderen Geraden), trage auf dieser vom Lotfußpunkt eine beliebig große
Strecke s ab und fälle vom Endpunkt das Lot auf die andere Gerade. Der so erhaltene Lotfußpunkt ist
dann von der ersten Geraden weiter entfernt als die abgetragene Strecke s.
Satz über Abstände zwischen parallelen Geraden:
Die in der Figur definierte
..........
..........
..........
............
Funktion f ist streng mono.
... ..............
..........
...
..........
...
..........
.
.
.
.
.
ton
fallend mit
.
.
...
y
..................
.... ......
..
..........
.........
...
..........
.........
...
..........
.........
...
..........
..........
.........
...
..........
.........
...
..........
...........
.........
...
... ...........
.........
...
..........
...
.........
...
..........
...
..........
.........
...
..........
...
.........
...
..........
...
..........
.........
...
..........
.
...
.........
...
.
...
.........
...
...
.........
...
...
.........
...
...
.........
...
.........
.........
.........
.........................................................................................................................................................................................................................................................................
lim f (x) = 0,
x
x→∞
g(y)
f (x)
.....
...
...
....
.
......
...
.
.....
und die in der Figur definierte Funktion g ist streng monoton steigend mit
lim g(x) = ∞.
x→∞
Zum Beweis:
Monotonie wie im vorigen Satz.
26
3
Zu lim f (x):
x→∞
Sei ake b, A ∈ a, Lot
von A auf b, Lotfußpunkt B. Es sei r > 0
beliebig, insbesondere
beliebig klein gegeben.
Auf BA+ Strecke der
Länge r abtragen, der
Endpunkt liege zwischen A und B. Die
Parallele zum
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
a ..........................
.......
.
.......
.......
.......
.......
.......
.......
.......
.......
.......
.
.
.
.
.
.
.
.......
...
.......
.......
.......
.......
.......
.......
.............
.......
.......
.
.
... ..........
.
.
.
.
..
.......
...
.......
.......
.......
...
.......
.......
.......
...
.......
.......
....... ..............
.....
...
................
...
....... .... ..............
...
.......
.......
...
...
.......
........
.......
........
.
.
....
...
.
.
.
.
.
........
..
........
....
...................
.
.
...................
.
.
.
.
.
.
.
.
.
..
...... ...........
.
.
.
.
........... ..................
.
.
.
.
.
.........
....
.............
......
.
.
.
.........
.
.
.
.
.
.
................
.......
.
......
.
.
.
.........
.
.
.
.....................
.
.
.
.
.
.
.
.
.
.........
...
.........
........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.........
.........
........
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.........
.........
...
...............
...............
.....
.............................................................................................................................................................................................................................................................................................................
A
S
V
r
b
r
B
T
e
U
anderen Ende durch den Streckenendpunkt schneide Ae+ in S. Der Lotfußpunkt von S auf a sei T . Wählt
man U ∈ T B − so, daß |T U | = |BT | wird, so schneidet das Lot auf a in U die Gerade b in einem Punkte
V , und es wird |U V | = r, was zu zeigen war.
Unter einem Parallelstreifen kann man den Durchschnitt zweier Halbebenen verstehen, die von parallelen
Geraden begrenzt werden und die jeweils die andere Gerade enthalten: ist akb, so begrenzen a, b den
Parallelstreifen ab+ ∩ ba+ .
Folgerung:
Zwei beliebige Parallelstreifen sind kongruent.
Beweis: Ein Lot in ein Parallelenpaar einzeichnen, zu dessen Länge gibt es auf dem anderen Parallelenpaar
ein Lot mit dieser Zahl als Länge, Lote samt Parallelen durch Bewegung ineinander überführbar.
Satz über das gemeinsame Lot:
Zwei Geraden, die sich nicht schneiden und die nicht parallel sind, haben genau ein
gemeinsames Lot.
Beweis:
Es genügt, ein symmetrisches zweirechtwinkliges Viereck zu finden, das zwei Seiten auf den
beiden Geraden hat.
Sei (s.Figur) |AC| > |BD|. E ∈ CA+ so,
daß |EC| = |BD|. Halbgerade t so, daß
<
) (EC + , t) ∼
) (BD+ , BA− ).
=<
A
...................
E
t
.
.................
....................
...
..............
...................
........................
...
.................
........................
......................................
................
.............................................................................................................................................................................
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.................................................................
...
...
........
...
.
.
...
....
....
...
...
...
...
...
...
...
...
...
...
...
..
....
.
...
...
...
...
...
...
.
...
...
.
.
...
...
...
...
...
...
...
....
.
...
...
...
...
...
...
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.........................................................
...
...........................................................
.
............................
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
..
.....................
...........................................
.
..................
.......
..............
C
B
D
S
T
Die Halbgerade t schneidet g(AB) in einem Punkt S. Beweis: Siehe unten. Der Lotfußpunkt von S auf
g(CD) sei T . Die Verschiebung längs g(CD), die C auf D abbildet, erzeugt ein zum zweirechtwinkligen
Viereck ECT S kongruentes Viereck, das zwei gegenüberliegende Seiten auf den beiden Geraden hat. Die
Seiten [ST ] und die dazu kongruente des Bildvierecks ergeben das gesuchte symmetrische zweirechtwinklige Viereck.
Der nebenstehenden Figur ent.......
nimmt man einen Beweis für
.......... .....
........... ........
A
............ .........
...................
............. ...............
.................
....................
.
.
.
.
.
.
...
.
.
.
.
B
.
.
.
.
................... ............
........................
..
die Existenz des oben genann...
........
.......................................
.........................
.................
....................................S
..................................................................................................................................
....
...........
.
.
.
.
.................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
............................................................
...
....
..........
E ..........
...
........
...
...........
ten Schnittpunktes S: Parallele zu
........
...
...........
...
........
....
...
...........
........
...
...........
.
.
... ...............
.
...
.
.
.
.
.
.
.
.
...
g(AB) durch D längs g(CD) nach
........
...
..........
...
.........
...........
...
........ ....
...........
...
...
........
...........
...
...
... ...............
C verschieben, das Bild kann die
...........
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
. ...
.. ............
...
........
...........
........ ....
...
............ ...
........
...
originale Parallele nicht schnei...
........... ...... ..
........
...
................ ...........................................................................................................................................................................................
.
.
.
.
.
.
.
.......................
... .........................................
...................
..........
den, schneidet also g(AB), und
.............
D
.................
C
daher muß auch t die Gerade
g(AB) schneiden.
Folgerungen:
1) Die Lotfußpunkte des gemeinsamen Lotes zweier Geraden haben den kürzesten Abstand zweier auf je
einer der beiden Geraden liegenden Punkte.
3.2
Hyperbolische Geometrie der Ebene
27
2) Das gemeinsam Lot zweier Geraden ist eine Symmetriegerade für die beiden Geraden; eine andere
Symmetriegerade ist die Mittelsenkrecht auf der gemeinsamen Lotstrecke.
Als Aussage über die Lagebeziehung zweier Geraden folgt nun der
Satz über die Lage zweier Geraden zueinander:
Zwei verschiedene Geraden haben entweder einen gemeinsamen Punkt, oder sie sind
parallel, oder sie haben ein gemeinsames Lot; diese drei Fälle schließen sich gegenseitig
aus.
Zur bequemeren Formulierung von Aussagen mit parallelen Geraden dient der Begriff des Fernpunktes,
der im folgenden definiert wird.
In der Menge aller Strahlen ist folgende Relation eine Äquivalenzrelation:
s, t sind äquivalent :⇔ s ⊆ t oder t ⊆ s, oder die Trägergeraden von s und t sind
parallel zu dem Ende, dem s und t angehören.
Die Klassen heißen Fernpunkte oder Enden im weiteren Sinne.
Sprechweise:
Ist g eine Gerade, e ein Fernpunkt, so wird definiert:
e ∈ g :⇐⇒ es gibt eine Halbgerade h mit h ∈ e und h ⊂ g
Folgerungen:
1) Jede Gerade hat genau zwei Fernpunkte.
2) Ein Fernpunkt kann durch eine Halbgerade repräsentiert (insbes. vorgegeben) werden.
Satz über die Inzidenz mit Fernpunkten:
Das Verbindbarkeitsaxiom und das hyperbolische Parallelenaxiom gelten weitgehend
auch dann noch, wenn man zur Menge der Punkte die Fernpunkte hinzufügt und das
Enthaltensein von Fernpunkten in Geraden wie oben angegeben definiert.
Satz über die Existenz und Einzigkeit der Lote von Fernpunkten auf Geraden:
Zu einer beliebig gegebenen Geraden und einem beliebigen nicht zur Geraden gehörenden Fernpunkt gibt es genau eine zur gegebenen Geraden senkrechte Gerade, die den
Fernpunkt enthält.
Beweise: Übungsaufgabe.
3.2.3
Geradenbüschel, Kreise, Grenzkreise, Abstandslinien
Definition eigentliches Geradenbüschel:
Es sei T ein Punkt. Die Menge
{g :
g ist Gerade mit T ∈ g}
heißt eigentliches Geradenbüschel mit dem Trägerpunkt T .
Definition Parallelenbüschel:
Es sei e ein Fernpunkt. Die Menge
{g :
g ist Gerade mit e ∈ g}
heißt Parallelenbüschel zum Ende e.
Definition Überparallelenbüschel:
Es sei l eine Gerade. Die Menge
{g :
g ist eine zu l senkrechte Gerade }
heißt Überparallelenbüschel zum Lot l.
28
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Diese drei Begriffe werden zum Begriff Geradenbüschel zusammengefaßt.
Folgerungen:
1.) Zu zwei verschiedenen Geraden gibt es genau ein Geradenbüschel, dem diese Geraden angehören, das
von ihm erzeugte Büschel.
2.) Ist B ein Geradenbüschel, X ein Punkt oder Fernpunkt mit der Voraussetzung
X 6= Trägerpunkt, falls B eigentliches Büschel ist,
X 6= e, falls B Parallelenbüschel mit Ende e ist,
X 6= Ende des gemeinsamen Lotes, falls B Überparallelenbüschel ist,
so existiert genau eine Gerade g mit g ∈ B und X ∈ g.
3.a) Sind B1 und B2 zwei verschiedene Geradenbüschel, nicht beide Überparallelenbüschel, so existiert
genau ein Gerade g mit g ∈ B1 ∩ B2 .
3.b) Sind B1 bzw. B2 zwei Überparallelenbüschel mit Loten l1 bzw. l2 , so gilt:
B1 , B2 haben eine gemeinsame Gerade
⇐⇒
l1 und l2 sind überparallel.
Vereinbarung zur Bezeichnung: Die Geradenspiegelung an der Geraden x wird mit σx bezeichnet.
Satz über Mittelsenkrechte eines Dreiecks:
Die drei Mittelsenkrechten eines Dreiecks gehören zu einem einzigen Geradenbüschel.
Beweis:
Im Dreieck ABC sei s1 die Mittelsenkrechte von [BC], s2 die Mittelsenkrechte von [AC].
Fall 1: s1 ∩ s2 = {S}. Es hat S von A, B, C denselben Abstand, also enthält die
Mittelsenkrechte von [AB] den Punkt S.
Fall 2: s1 , s2 seien überparallel mit dem gemeinsamen Lot l.
σ s1
σs2 (A) = C,
σs1 (C) = B,
◦ σs2 (A) = B,
σs2 (l) = l
σs1 (l) = l
σs1 ◦ σs2 (l) = l
C
......
...
......
...
.....
.....
...
..... ...........
.....
...
......
.....
.
.
.....
.
.
.
.
.
......
.
...
....
......
... 1
.....
......
2 ...........
.....
...
......
..
......
...
.....
...... ....
... .........
...... ..
... ......
.......
...........
.........
..... ...
.......... ............
..... .....
......
..
....
.
.
.
.
.
.
.
.
......
...
.
...
.
.
.
......
.
.
.
.
...
......
.....
..
......
...
..
.....
.
.
.
......
.
.
.
.
.
..
....................................................................................................................................................................................................
...
...
...
...
...
.
...
...
.
...
...
...
...
...
..
....
....
.
...
.
.
...
...
.
...
.
...
...
.
.
.
...
.
.
.
....
....
...
.
.
...
...
.
...
...
...
....
...
.
.......
.
.
.
.
.
.
.
.
.
.
.
.
..............................................................................................................................................................................................................
.
...
.
.
...
...
A
B
...
...
.
s
s
Ist FA der Lotfußpunkt des Lotes
von A auf l, FB der Lotfußpunkt
A
B
des Lotes von B auf l, so folgt
σs1 ◦ σs2 (FA ) = FB . Das Vier=
=
eck AFA FB B ist also zweirechtwinklig symmetrisch, die Mittell
F
F
senkrechte von [FA FB ] ist Symmetrielinie, also zugleich Mittelsenkrechte von [AB].
Fall 3: s1 ke s2 .
Wegen Fall 1 und Fall 2 kann die drit..........................................................................
..............................................................................................
te Mittelsenkrechte s1 weder schneiden
........
..
.......
.......
......
.......
......
...
......
noch dazu überparallel sein, ebenso s2 ;
......
..... .........
......
.
.
.
.
.
.
.
.
.....
s2 ...........
...
... s1
...
.....
.....
.....
..... C .........
.....
also hat sie mit s1 , s2 je ein Ende ge.....
.....
.....
.....
.....
....
.....
.....
... ........
..... ......
.......
......
meinsam. Diese Enden können nicht
..
.
... .....
..... ...
..... .....
... .........
..
.....
.....
.
.
.
.
.
.
.
von e verschieden sein, weil sonst al.
...
....
..
....
.
.
.
.
.
.
................................................................................................................
B
...
.
..
...
A
le drei Seiten“ des Dreiecks“ aus den
.
..
...
.
”
”
...
..
.
...
...
drei Fernpunkten der Geraden s1 , s2
...
...
...
...
...
...
....
von g(AB) geschnitten würden, was der
...
..
...
...
...
..
von g(AB) erzeugten Halbebenenzerle... ....
... ..
... ...
gung zuwiderlaufen würde.
.. ..
Hilfssatz: Für beliebige Geraden a, b ist σa (b) eine Gerade des von a und b erzeugten Büschels.
3.2
Hyperbolische Geometrie der Ebene
29
Zum Beweis: Eigentliches Geradenbüschel: a ∩ b ist Fixpunkt.
Überparallelenbüschel: Gemeinsames Lot ist Fixgerade.
Parallelenbüschel: Lot von einem Punkt ∈ b auf a, Paralleldistanz und -winkel.
Satz über drei Spiegelungen:
Das Produkt dreier Geradenspiegelungen an drei Geraden eines Büschels ist eine
Geradenspiegelung an einer Geraden dieses Büschels.
Beweis:
Seien g, h, k drei Geraden eines Büschels, A ∈ g so, daß die Punkte A, B := σh (A) und C := σk (B) nicht
kollinear sind. h und k sind Mittelsenkrechten im Dreieck ABC und m sei in diesem Dreieck die dritte
Mittelsenkrechte (die von [AC]). Setzt man ϕ := σm ◦ σk ◦ σh ◦ σg , so ist ϕ(A) = A. Nach dem Satz über
die Mittelsenkrechten eines Dreiecks gehört m zu dem von g, h, k erzeugten Büschel, und nach dem letzten
Hilfssatz gilt ϕ(g) = g. Für X ∈ g, X 6= A folgt ϕ(AX + ) = AX + (Halbebenen betrachten!), und da ϕ
als Produkt von vier Geradenspiegelungen gleichsinnig ist, folgt für Y ∈
/ g, daß ϕ(AX + Y + ) = AX + Y +
ist, also ϕ = ι, d.h., σk ◦ σh ◦ σg = σm .
Der Begriff des Kreises läßt sich (schon in der absoluten Geometrie) mit Hilfe eines eigentlichen Geradenbüschels definieren. Zieht man in der hyperbolischen Geometrie auch die beiden anderen Sorten
von Geradenbüscheln heran, so ergeben sich zwei weitere Typen von Kreisen im weiteren Sinne, in der
Literatur auch als Zykeln bezeichnet.
Definition Kreis, Grenzkreis, Abstandslinie:
Es sei B ein Geradenbüschel, P ein beliebiger Punkt. Die Menge
k := {X : X = σg (P ), g ∈ B}
heißt
a) Kreis mit Mittelpunkt M ,
falls B ein eigentliches Geradenbüschel mit
dem Trägerpunkt M ist,
b) Grenzkreis zum Ende e,
falls B ein Parallelenbüschel zum Ende e ist,
c) Abstandslinie zur Basisgeraden l, falls B ein Überparallelenbüschel mit dem
gemeinsamem Lot l ist.
Eigenschaften aller drei Sorten von Kreisen im weiteren Sinne:
1. Für Q ∈ k ist auch k = {X : X = σg (Q), g ∈ B}. (Unabhängigkeit von P ∈ k)
2. Jedes g ∈ B ist Symmetrieachse von k. (Symmetrie)
3. Ist a ∈ B, A = k ∩ a und h das Lot auf a in A, so liegt k bezüglich h ganz auf einer Seite.
(Stützgerade)
4. Der Durchschnitt einer beliebigen Geraden mit k besteht - falls k nicht selbst Gerade ist - aus
höchstens zwei Punkten. (Schnittpunkte mit Geraden)
5. Zu drei beliebigen paarweise verschiedenen Punkten gibt es genau einen Kreis im weiteren Sinne,
der die drei Punkte enthält.
Beweise:
Zu 1.: Q ∈ k ⇒ es existiert g0 ∈ B, Q = σg0 (P ). Sei gP die Gerade ∈ B mit P ∈ gP .
{Y : Y = σg (Q), g ∈ B} = {Y : Y = σg σg0 (P ), g ∈ B} = {Y : Y = σg σg0 σgP (P ), g ∈ B}
Nach dem Satz von den drei Spiegelungen ist σg ◦ σg0 ◦ σgP = σh mit h ∈ B, und wenn
g ganz B durchläuft, dann h ebenfalls (die Abbildung g 7→ h mit σg ◦ σg0 ◦ σgP = σh ist
eine Bijektion von B auf B), also ist
{Y : Y = σg (Q), g ∈ B} = {Y : Y = σh (P ), h ∈ B} = k
Zu 2.: Sei h ∈ B beliebig und gP die Gerade mit gP ∈ B, P ∈ gP . Es folgt
σh (k) = {σh (X) : X = σg (P ), g ∈ B} = {Y : σh (Y ) = σg (P ), g ∈ B} =
= {Y : Y = σh σg (P ), g ∈ B} = {Y : Y = σh σg σgP (P ), g ∈ B} =
= {Y : Y = σl (P ), l ∈ B} = k.
30
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Zu 3.: Wegen 1. kann A = P gesetzt werden. Ist g ∈ B beliebig und B := σg (P ), so ist die
Halbebene hB + gleich hT + , falls B eigentliches Büschel mit Trägerpunkt T , oder gleich
he+ , falls B Parallelenbüschel zum Ende e, oder gleich hl+ , falls B Überparallelenbüschel
mit dem Lot l ist, unabhängig von der Wahl von g. Also liegen alle Punkte von k in
derselben Halbebene bezüglich h.
Zu 4.: Wenn A, B, C drei kollineare Punkte von k sind, so gehören (wegen 1.) die Mittelsenkrechten von [AB] und [AC] beide zu B, es ist B ein Überparallelenbüschel mit g(AB) als
Lot, d.h., k = g(AB).
Zu 5.: Die Mittelsenkrechten von [AB] und [BC] erzeugen ein Büschel B, und k = {X : X =
σg (A), g ∈ B} ist der einzige A, B, C enthaltende Kreis im weiteren Sinne.
Eigenschaften spezieller Sorten von Kreisen im weiteren Sinne:
1. Kreise sind beschränkte Punktmengen, Grenzkreise und Abstandslinien sind unbeschränkt. Geraden
sind spezielle Abstandslinien (in der Definition unter c) P ∈ l wählen).
2. Kreise schneiden jede Gerade des erzeugenden Büschels in genau zwei Punkten, Grenzkreise und
Abstandslinien in genau einem.
3. Zwei beliebige Grenzkreise sind kongruent.
4. Durch zwei verschiedene Punkte gibt es genau zwei Grenzkreise.
5. Ist g eine Gerade und % eine positive reelle Zahl, so ist die Menge der Punkte, die von g den Abstand
% haben, ein Paar von symmetrisch zu g liegenden Abstandslinien mit der Basisgeraden g.
Beweise:
Zu 1.: F ist beschränkt :⇐⇒ F ist Teilmenge einer Kreisfläche {X : |XM | ≤ r}.
Da die Abstände der Punkte einer Geraden zu den Lotfußpunkten auf eine dazu parallelen Geraden
beliebig groß werden, sind Grenzkreise unbeschränkt.
Da es überparallele Geraden mit beliebig langer Entfernung ihrer Schnittpunkte mit ihrem gemeinsamen Lot gibt, sind Abstandslinien unbeschränkt.
Zu 2.: Sei gP die Gerade mit gP ∈ B und P ∈ gP , ferner g ∈ B beliebig. Wenn B eigentlich ist (k ist Kreis),
dann haben gP und g genau zwei (senkrechte) Symmetrielinien. Wenn B ein Parallelen- oder ein
Überparallelenbüschel ist (k ist Grenzkreis oder Abstandslinie), dann haben gP und g genau eine
Symmetrielinie. Eine solche Symmetrielinie s, sie gehört zu B. Es ist σs (gP ) = g und k ∩ g = σs (P ).
Zu 3.: O.B.d.A. seien k1 , k2 Grenzkreise zum gleichen Parallelenbüschel B, ferner g ∈ B und k1 ∪ g = A1
+
+
und k2 ∪ g = A2 . Die Kongruenztransformation ϕ, die A1 A+
in A2 A−
abbildet, führt g und
2X
1X
auch B je in sich über. Es folgt
ϕ(k1 ) = ϕ({X : X = σg (A1 ), g ∈ B} = {ϕ(X) : X = σg (A1 ), g ∈ B} =
= {Y : ϕ−1 (Y ) = σg (ϕ−1 (A2 )), g ∈ B} = {Y : Y = ϕσg (ϕ−1 (A2 )), g ∈ B} =
= {Y : Y = σϕ(g) (A2 )), g ∈ B} = {Y : Y = σg (A2 )), g ∈ B} = k2 .
Zu 4.: Jeder zwei gegebene Punkte enthaltende Grenzkreis muß zu einem Parallelenbüschel gehören, dem
die Mittelsenkrechte der beiden Punkte angehört. Es gibt genau zwei solche Büschel: Zu jedem
Ende der Mittelsenkrechten eines.
Zu 5.: Ist A ein Punkt, F der Lotfußpunkt von A auf g, |AF | = %, ferner X ein Punkt ∈ gA+ , der von
g den Abstand % hat, G der Lotfußpunkt von X auf g, so ist das Viereck AF GX zweirechtwinklig
symmetrisch, X ergibt sich aus A durch Spiegelung an der Mittelsenkrechten von [AG]. Somit liegt
X auf der Abstandslinie mit der Basisgeraden g, auf der auch A liegt, und jeder Punkt dieser
Abstandslinie hat von g den Abstand %. Die analoge Überlegung gilt für die andere Halbebene
bezüglich g.
Bemerkung:
Grenzkreise und Abstandslinien haben wie Geraden die Eigenschaft, zusammenhängende Linien zu sein,
die die Ebene in zwei unbeschränkte Gebiete zerlegen derart, daß zwei Punkte genau dann im gleichen
Gebiet liegen, wenn sie sich durch einen die Linie nicht schneidenden Streckenzug verbinden lassen.
3.2
Hyperbolische Geometrie der Ebene
3.2.4
31
Kongruenztransformationen in der hyperbolischen Ebene
Nach Bewegungsaxiom (10) aus 3.1.1 kann jede Kongruenztransformation durch Angabe zweier SemiEbenen, die Original- und Bildmenge sind, eindeutig festgelegt werden; die Original-Semi-Ebene kann
beliebig gewählt werden. Da man eine beliebige Semi-Ebene edurch Zusammensetzung von höchstens
drei Geradenspiegelungen in eine beliebige andere überführen kann und da ein Produkt dreier Geradspiegelungen ungleichsinnig ist, folgt der
Satz über Darstellung von Kongruenztransformationen mittels Spiegelungen:
Jede Kongruenztransformation ist als Produkt von höchstens drei Geradenspiegelungen darstellbar, und jede gleichsinnige Kongruenztransformation ist
als Produkt von zwei Geradenspiegelungen darstellbar.
a) Gleichsinnige Kongruenztransformationen:
Erster Fall: Produkt zweier Geradenspiegelungen an sich schneidenden Geraden.
Der Schnittpunkt S ist Fixpunkt. Die geordneten Paare Originalstrahl-Bildstrahl mit Anfangspunkt S
sind alle gleichsinnig kongruent (= Drehwinkelgröße). Die Kongruenztransformation ist eine Drehung mit
dem Fixpunkt S.
Spezialfall: Involutorische Drehungen (= 180o -Drehung, Punktspiegelung, Produkt von Spiegelungen an
zwei zueinander senkrechten Geraden).
Alle Drehungen mit ein und demselben Fixpunkt Z bilden eine Gruppe. Orbits dieser Gruppe: Kreise
mit dem Mittelpunkt Z.
Zweiter Fall: Produkt zweier Geradenspiegelungen an zueinander parallelen Geraden.
Das gemeinsame Ende der beiden Spiegelgeraden bleibt fest. Ein beliebiger Grenzkreis zu diesem Ende
bleibt als Ganzes fest. Sind A, B zwei Punkte eines solchen Grenzkreises, A0 , B 0 ihre Bilder, so sind die
Strecken [AA0 ] und [BB 0 ] kongruent. Die Kongruenztransformation heißt Grenzdrehung. Eine Grenzdrehung ist durch Angabe eines Paares Originalpunkt-Bildpunkt sowie der Halbebene bezüglich dieses
Paares, in der das feste Ende der Grenzdrehung liegen soll, eindeutig bestimmt. Involutorische Grenzdrehungen gibt es nicht.
Alle Drehungen mit ein und demselben festen Ende bilden eine Gruppe. Orbits: Die Grenzkreise zu diesem
Ende.
Dritter Fall: Produkt zweier Geradenspiegelungen an überparallelen Geraden.
Das gemeinsame Lot der beiden Geraden bleibt als Ganzes fest. Die geordneten Paare OriginalpunktBildpunkt auf diesem Lot sind alle zueinander kongruent. Die Kongruenztransformation ist eine
Verschiebung längs einer Geraden. Involutorische Verschiebungen gibt es nicht.
Alle Verschiebungen längs einer festen Geraden bilden eine Gruppe. Orbits: Abstandslinien mit dieser
Geraden als Basisgerade.
b) Ungleichsinnige Kongruenztransformationen
Es sind Produkte dreier Geradenspiegelungen zu betrachten.
Erster Fall: Drei Spiegelgeraden, die nicht zu einem Büschel gehören.
Das Produkt kann umgerechnet werden in ein Produkt aus einer Verschiebung längs einer Geraden und
einer Spiegelung an dieser Geraden. Die Kongruenztransformation heißt Schubspiegelung.
Zweiter Fall: Drei Spiegelgeraden, die zu einem Büschel gehören.
Das Produkt ist nach dem Satz über drei Spiegelungen (s.3.2.3) eine Geradenspiegelung.
Zusammenfassung:
Satz über Typen von hyperbolischen ebenen Kongruenztransformationen:
Jede gleichsinnige Kongruenztransformation ist eine Drehung oder eine Grenzdrehung oder eine Verschiebung.
Jede ungleichsinnige Kongruenztransformation ist eine Schubspieglung oder eine Geradenspieglung.
32
3
3.2.5
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Hyperbolisches Pentagramma
Ein rechtwinkliges Dreieck habe in der traditionellen Bezeichnungsweise die
Bestimmungsstücke“ a, b, c, α, β. Von diesen reichen schon zwei aus, um das Dreieck bis auf Kongruenz
”
eindeutig festzulegen.
Ein dreirechtwinkliges Viereck möge die Seitenlängen p, q, r, s und den spitzen Winkel γ haben, wobei
die Seiten mit den Längen p und q den spitzen Winkel einschließen mögen und die Seite mit der Länge
p an der mit der Länge r anliegen möge. Auch hier liegen fünf Bestimmungsstücke“ vor, und auch hier
”
genügen zwei, um das Viereck bis auf Kongruenz eindeutig festzulegen.
Zwischen je vier Bestimmungsstücken eines rechtwinkligen Dreiecks bestehen Abhängigkeiten, ebenso zwischen je vieren eines dreirechtwinkligen Vierecks. Auf Grund starker Analogien zwischen diesen Abhängigkeiten bei Drei- und Viereck ergeben sich bemerkenswerte Zuordnungsmöglichkeiten.
a) Rechtwinkliges Dreieck:
.......
......................
......
...
......
...
......
.
......
..
......
..
.
......
.
......
...
.
......
......
..
.
......
..
.
......
.
......
.
.
.....
..
.
.
.....................................................................................................................................................................................................
..............
......
......
..............
......
..
.............
......
...
......
.............
...
......
.............
......
...
.............
......
............
.... .
......
............
...... . .....
............
...... ..
...........
.. ..
.........
........
.
........
.....
..... .......
..
......
a
b
α
β
c
......
......
..
..... ..........
...
...
... .......... ...........
... ...... .......
.....
.
...
..... ..........
...
......
.....
...
......
....
...
......
....
......
...
...
......
...
...
...
...
...
..............
...
...
... . ...........
...
...
......
...
.
.
.
......
...
... ..
......
.
...
... ...
......
......
...
......
.
...
.
......
.....
......
.
...
.
......
.. ....
...
.
.
......
.. ...
...
.
......
.
...
..
...
......
.
.
...
......
... ....
......
...
... ...
......
.
.....
... ..
.
.
.
.
.
...............................................................................................................................................
b
α
β
c
Π(c + ∆(β)) + α = Π(b)
(1)
.......................................................
...
...
...
...
...
....
...
...
...
...
...
...
...
...
...
...
.
...
...
.....
...
...
..
...
...
....
....
...
....
...
...
....
...
....
...
....
...
...
.....
...
.....
...
...
.....
..
.....
...
...
.....
...
.....
...
...
.....
...
....
.
...
.....
.........
...
.......... .........
..
...
.....
...
.
....
...
.
.....
.
.....
...
...
...
.....
...
...
...
.....
...
...
.....
.
....
.
.....
...
..
.
...
.
.....
...
..
.....
.
...
.
...
.
.....
.
...
.
.....
.
...
..
...
.....
.
.
.
...
.....
...
..
.
.....
.
...
...
..
.....
.
.
.
.....
... ...
...
.....
.
... ...
..
..
.
.
.
...................................................................................................................................................................................................
b
α
β
c
Unter evtl. Verwendung der Definition Π(−x) := π − Π(x) gilt:
Π(c − ∆(β)) − α = Π(b)
.......
.......
.......
.......
.......
....
.................
.... .. ..............
....
.......
.
.
.
.......
..
.......
......
.......
......
..
......
.
.
.
......................
.
.
..
............. ............................
.
.
.
.
.
.
.
.
.
......
.
.
.
.......
........
.
.
.
.
.
..
.......
.
.
.
.
.
.
.
.......
..
........
.
.
.
.
.
.
.
.
.
.
.
.
.......
.
.
.......
.............
..
...
..
.
.
..........................................................................................................................................................
...
...
.
.
..........
..........
...
.........
.........
...
.........
...
........
........ ......
...........
..
b
α
a
β
(2)
Π(∆(β) − a) + Π(∆(α) + b) =
b) Dreirechtwinkliges Viereck:
Ergänzen sich die Parallelwinkel zweier Strecken s1 , s2 zum Winkel
und schreibt s2 = s∗1 , also
π
x∗ := ∆( − Π(x))
2
π
2,
π
2
(3)
so nennt man sie komplementär
3.2
Hyperbolische Geometrie der Ebene
33
Mit dieser Bezeichnung erhält man folgende Beziehungen:
.........
..........
...... .........
... .... ................
...............................
... ...
.................................................................................................................
... .....
.......
.....
.....
...
..
.....
..
...
....
.....
..
...
.....
...
...
......
...
.
...
.
.
.......
.
...
...
.
.
.
.
.......
.
...
...
.
.
.
.
.
.
.
.........
...
.
...
.
.
.
.
.
.
.........
...
...
.
.
.
.
.
.
.
....
.
............
...
.....
...........
...
......
....... ...
...
... ..................
..........
..... ..
...
...
...........
...
...
...........
...
..
...........
....
...
........... ....
...
...
.....
...
...
....
.....
...
...
...
...
...
...
...
...
...
.
.
...
...
..
.
...
...
..
.
...
.........
.........
.....................................................................................................................................................................................
..
q
γ
p
s
γ = Π(p) + Π(q + s∗ )
(4)
r
......
..........................
.....................
... ....
........................
..............................................................
.... ....
.....
..........
.. ....
...
...
...
....
...
...
...
...
..
...
...
....
.
...
..
...
...
.
...
..
...
.
...
...
.
.
...
...
.
...
.
.
...
...
.
...
.
.
...
.
...
...
.
.
...
.
...
...
..
.
.
.
...
.
.
...
.
.
.
.
....
...
...
...
.
.
.
.
.
.
...
...
..
.
.
.
.
.
.
.
...
...
...
..
.
.
.
.
.
.
...
...
...
.
..
.
.
.
.
.
.
.
.
...
...
. ..
....
.
.
.
.
.
...........
.
...
.
..............
.
.
.
.
.
.
.
.
...
.
...
.
.......................................... .....
.
...
.....
..
.
.... ..................................................................................................................................................................................
...
γ
q
γ
p
.............
.............
.............
.............
..................
.
........ ............................................
.........................
...
.. ..
...............................................
...
... ....
.......
....
... ....
....
..
...
.
...
...
...
..
.
...
...
...
..
.
.
.
...
.
...
..
.
.
.
...
..
..
.
.....
.
.
...
..
...
.
..
.
.
...
...
...
..
.
.
...
.
.
..
.
.
.
.
.
....
.
.
.
...
....
...
.
.
.
.
...
.
.
.
.
.
.
.
.
.
...
......... ..............
...
...
...
...
.
.
.
.
.
.
.
.
.
.
....
... ......................................................................................................................................................................
..
q
p
s
s
r
r
Unter evtl. Verwendung von Π(−x) = π − Π(x) gilt:
γ = Π(q − s∗ ) − Π(p)
.....
.....
.....
...
...........
..... ........
...
.....
..............
...
...
..
..... ......
...
. .. .......
.
..
.
.
........
.
........ ....
.... ... .....
........ ..
... ...
..........
... ...
... ............
... ....
.........
...
...............
...
...
...
...............................
...
...
...
.....
.
...
...
.
.
.
....
...
...
...
...
...
...
...
...
.
...
...
... ...
...
...
... ..
... ..
...
...
... ...
...
....
........
.
.
.
.
.
.
.
.
................................................................................................................................
γ
q
p
Π(s∗ − r) + Π(p + ∆(γ)) =
(5)
π
2
(6)
s
r
Vergleicht man die Formeln (1) und (2) mit den Formeln (4) und (5), so wird nahegelegt,
q
s∗
= c
= ∆(β).
zu setzen. Dadurch ist im Falle, daß ein rechtwinkliges Dreieck gegeben ist, ein dreirechtwinkliges Viereck
bis auf Kongruenz eindeutig festgelegt, und um gekehrt im Falle eines gegebenen dreirechtwinkligen
Vierecks ein rechtwinkliges Dreieck.
Durch Kombination der Drei- und Vierecksgleichungen (Addition und Subtraktion von (1) und (2), ebenso
von (4) und (5), Einsetzen in (6), Vergleich mit (3)) ergibt sich folgender
Satz über Zuordnung von rechtwinkligen Drei- und Vierecken:
Zu jedem rechtwinkligen Dreieck mit den Stücken (a, b, c, α, β) existiert ein
dreirechtwinkliges Viereck (p, q, r, s, γ) mit
34
3
p
q
r
s
γ
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
= ∆(α)
= c
= a
π
= ∆( − β)
2
= Π(b),
und zu jedem dreirechtwinkligen Viereck mit den Stücken (p, q, r, s, γ) existiert
ein rechtwinkliges Dreieck (a, b, c, α, β) mit
α
=
β
=
a =
b =
c =
Π(p)
π
− Π(s)
2
r
∆(γ)
q
(7)
(8)
(9)
(10)
(11)
Folgerung:
Ist ABCD ein bei B, C, D rechtwinkliges Viereck,
E ein Punkt auf [AD], so gilt [EC] ∼
= [AB] genau
dann, wenn CE + und BA+ parallele Halbgeraden sind: Man lege das im Satz genannte Dreieck
kongruent so in das Viereck, daß |DC| = r = a ist
und <
) ECB = π2 − β = Π(s) = Π(|BC|). Hieraus
ergibt sich eine Möglichkeit, mit Zirkel und Lineal zu gegebener Strecke der Länge x den Parallelwinkel Π(x) zu konstruieren und umgekehrt (s.
nebenstehende Figur)
.
...............................
..
......................
.....
................................................................... ... ...
..................................................................
.....................
...
..
.....
.........
...
.........
...
...
.........
....
...
.........
.........
...
.
.
........
...
........
.
.....
........ ...
...
..........
.........
...
... ...........
....
........
...
...
.
....... . ..
...
.
.
.
...
.
.
.
.
..........
...
...
.
.
.
.
.
...
. . .........
...
.......
...
...
......
...
......
...
.....
.....
.....
...
..... ....
..
..... ...
..... ..
....
.................................................................................................
A
B
γ
E
D
β
C
Berücksichtigt man die Tatsache, daß mit (a, b, c, α, β) auch (b, a, c, β, α) die Bestimmungsstücke eines
rechtwinkligen Dreiecks sind und daß mit (p, q, r, s, γ) auch (q, p, s, r, γ) ein dreirechtwinkliges Viereck
festlegt, so ergibt sich durch Kombination der im letzten Satz angegebenen Zuordnungen :
Satz über zugeordnete rechtwinklige Dreiecke:
Sind (in der traditionellen Bezeichnungsweise) die fünf Zahlen (a, b, c, α, β)
die Bestimmungsstücke eines rechtwinkligen Dreiecks, so auch die fünf Zahlen (b, ∆( π2 − β), ∆(α), π2 − Π(a), Π(c)).
Die in diesem Satz angegebene Zuordnung kann wiederholt werden. Es zeigt sich, daß sich nach fünf
Schritten wieder das Ausgangsdreieck ergibt, so daß sich folgende fünfgliedrige Kette zugeordneter rechtwinkliger Dreiecke ergibt (wie in 2.2.5 werde für einen Winkel ξ der Komplementwinkel π2 − ξ mit ξ ∗
bezeichnet):
(a,
b,
(b,
∆(β ∗ ),
∗
(∆(β ),
(c∗ ,
(∆(α∗ ),
c,
α,
β)
∆(α), Π(a)∗ ,
∗
Π(c))
∗
c ,
∗
a ,
Π(b) ,
α)
∆(α∗ ),
b∗ ,
β,
Π(a)∗ )
a,
∆(β),
Π(c),
Π(b)∗ )
Bemerkungen und Übungsaufgaben:
1.) Eine analoge Kette zugeordneter Figuren kann für dreirechtwinklige Vierecke hergestellt werden.
2.) Zu jedem rechtwinkligen Dreieck mit den Bestimmungsstücken (a, b, c, α, β) gibt es ein Fünfeck mit
fünf rechten Innenwinkeln, dessen Seitenlängen die Längen der fünf Hypotenusen der Dreiecke in der oben
genannten Kette sind.
3.2
Hyperbolische Geometrie der Ebene
35
3.) Eine Anwendung der Kette zugeordneter rechtwinkliger Dreiecke besteht darin, mit Zirkel und Lineal
ein Dreieck aus drei gegebenen Winkeln zu konstruieren.
3.2.6
Zerlegungsgleiche Polygone in der hyperbolischen Ebene, Dreiecksinhalt und Defekt
Begriffe: Polygon, Elementargeometrische Summe, Zerlegungsgleichheit
Polygon: Konvexes Polygon := Durchschnitt endlich vieler Halbebenen, der beschränkt
ist und innere Punkte enthält.
Polygon: Vereinigung endlich vieler konvexer Polygone.
Elementargeometrische Summe: A, B, C Polygone.
A + B = C :⇐⇒
C = A ∪ B und A ∩ B enthält keine inneren Punkte von A
oder B.
A1 + . . . + P
An = C :⇐⇒ C = A1 + (A2 + . . . + An ) (Induktion)
kurz: C = Ai .
Zerlegungsgleichheit: P, Q Polygone.
z
P = Q :⇐⇒
Es existieren eine natürliche ZahlPn und Polygone
P
P1 , . . . , Pn , Q1 , . . . , Qn mit P =
Pi , Q =
Qi
und Pi ∼
= Qi für i = 1, . . . , n
z
Folgerung: = ist Äquivalenzrelation.
Zum Beweis:
z
z
A = B und B = C =⇒
P
P
P
P
A = Pi , B = Qi1 , ϕi (Pi ) = Qi1 , B = Qj2 , C = Rj , ψj (Qj2 ) = Rj .
Man setze Sij := Qi1 ∩ Qj2 (Zerlegungen übereinanderlegen) und betrachte die Mengen ϕ−1
i (Sij ) ⊆ A
und ψj (Sij ) ⊆ C für i = 1, . . . , n, j = 1, . . . , m.
Es gibt eine bemerkenswert einfache Beziehung zwischen Zerlegungsgleichheit und Winkelsumme. Hierzu
zunächst fünf Hilfssätze.
Hilfssatz 1:
Ist D ein Dreieck, s eine Seite von D, so existiert ein zweirechtwinkliges (rechte
Winkel liegen aneinander) symmetrisches Viereck V mit folgenden Eigenschaften:
(1) Die an den spitzen Winkeln von V anliegende Seite ist s.
(2) Die Summe der spitzen Winkel von V ist die Winkelsumme von D.
z
(3) V = D.
Beweis: (Vergl. Satz über die Winkelsumme im Dreieck in 3.2.2, Seite 29)
C
....
.............
....... .....
....... . ..........
....... . . .......................
.
.
.
.
.
.
.
....... ..... . ......................
....... . ..... .....................
........ . . .................................
....... . . . . .....................
....... . . . . ....................................................
.
.
.
.
.
....... . . . . . ...............................
....... . . . . . .....................................
........ . . . . . . ......................................
....... . . . . . . . .............................
........ . . . . . . . . . . . . . . ........................................................................
.
.
.
.
.
....
...............................
....... . . . . . . . . .................................................
........ . . . . . . . . .........................................................
...................................................................................................................................................................................................................................................................................................................................................................................................................................
........................................ . . . . . . . . . .......
......................................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
................
.................................................. . . . . . . . . .......
...............................................................................
............................................................ . . . . . . . ..........
............................................ . . . . . . . ..........
.....................................................................
..................................................... . . . . . . . . . . . . ..........
....................................................
........................
...................................... . . . . . ..........
.
..........
................................. . . . . . .......
....................................................
.................................................... . . . . .............
....................................
.................... . . . . .....
..................................
........................................................ . . ...............
...............................
..................... . ..... ......
................... . . ...........
......................
................
................... . ............
...........
............ ...........
....
..............
.................................................................................................................................................................................................................................................................................................
k
Die Fußpunkte der Lote von den
Ecken von D auf die Verbindungsgerade der Mittelpunkte der beiden
an s anliegenden Seiten bilden mit s
das Viereck V .
∼
A
∼
∼
k
s
B
Hilfssatz 2:
Zwei Dreiecke mit einer gemeinsamen Seite und gleicher Winkelsumme sind
zerlegungsgleich.
Beweis:
36
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Zu beiden Dreiecken bilde man gemäß Hilfssatz 1 die zu ihnen zerlegungsgleichen Vierecke auf der gemeinsamen Seite, diese ist dann beiden Vierecken gemeinsam. Nach Voraussetzung sind die spitzen Winkel
beider Vierecke gleich groß, und da die vierte Vierecksseite als gemeinsames Lot eindeutig festgelegt ist,
sind die Vierecke kongruent, also zerlegungsgleich. Wegen der Transititvität der Zerlegungsgleichheit sind
auch die Dreiecke zerlegungsgleich.
Hilfssatz 3:
Zu jedem Dreieck D existiert ein Dreieck D0 mit folgenden Eigenschaften:
z
(1) D0 = D.
(2) D und D0 haben dieselbe Winkelsumme w.
(3) D0 hat einen Winkel der Größe w2 .
Beweis:
Zu D gemäß Hilfssatz 1 das symmetrische zweirechtwinklige Viereck bilden, es hat einen spitzen Winkel
der Größe w2 . Eine Seite zwischen spitzem und rechtem Winkel über den Rechtwinkelscheitel hinaus um
ihre eigene Länge verlängern und Endpunkt mit dem Scheitel des anderen spitzen Winkels verbinden
ergibt D0 .
Hilfssatz 4:
Zwei Dreiecke mit gleicher Winkelsumme sind zerlegungsgleich.
Beweis:
Man bilde zu beiden Dreiecken gemäß Hilfssatz 3 je ein
zerlegungsgleiches Dreieck ABC und AB 0 C 0 mit gleicher
...
......
..... ...
..... .. C
Winkelsumme so, daß <
) BAC die halbe Winkelsumme ist
..... ....
.
.
.
.
.....
..
..
.....
und B 0 ∈ AB + sowie C 0 ∈ AC + gilt. Ist B = B 0 , so
..... γ ....
.....
..
....
.
.
.
.
.
0
0
.
auch C = C , fertig. Gelte o.B.d.A. Zw(ABB ). Wäre
...
0...........
C
...
..... .....
..... .. ..
...
..... .... ....
.
.
.
.
.
Zw(ACC 0 ), so hätte das Viereck CC 0 B 0 B die Winkelsum.
.
..
....
.... ....
...
.....
...
.....
... ....
.....
me 2π, was nicht sein kann. Also gilt Zw(AC 0 C).
... ... ....
.....
.
.
.
.
.
.
.
.
.
.
... ..
.....
....
......
.....
Werden in üblicher Weise die Innenwinkel von ABC und
...
...
.....
.....
....
...
.....
.
.
.. ..
.
0 0
0
.
.
.
.. .....
...
.
.
.
.
AB C mit α, . . . , γ bezeichnet, so gilt für die Winkelsum.
.
.
.
.
. ....
...
.
.
.
.
.
.
.
.
...
....
.... ....
...
.....
men
... ...
...
.....
.....
...
... ...
.....
.
.
...
.
.
.
0
0
0
.
.
.
. ...
...
....
.
.
im Dreieck BC C: β− <
) ABC + π− <
) AC B + γ,
.
.
.
...
. ..
...
.
.
.
.
.
.
.
...
. ...
...
.
.
.
.
0 0
0
0
0
0
.
.
...
...
...
.
.
.
im Dreieck BC B : π− <
) ABC + γ − <
) AC B + β ,
.
...
.
.
0
.
....
...
.
.
.
.
.
β
.
.
..................................................................................................................................................................
0
0
wegen β + γ = β + γ sind diese Winkelsummen gleich,
A
B
B0
und da [BC 0 ] beiden Dreiecken gemeinsam ist, sind sie
nach Hilfssatz 2 zerlegungsgleich, somit auch ABC und
AB 0 C 0 und die Ausgangsdreiecke.
Hilfssatz 5:
Zwei zerlegungsgleiche Dreiecke haben dieselbe Winkelsumme.
Beweis:
Ist D elementargeometrische Summe von Dreiecken D1 , . . . , Dn , so gilt
Ws(D1 ) + Ws(D2 ) + · · · + Ws(Dn ) ≡ Ws(D) modπ
Aus Hilfssatz 4 und 5 folgt nun der
Satz über die Äquivalenz von Zerlegungs- und Winkelsummengleichheit:
Zwei Dreiecke der hyperbolischen Ebene sind genau dann zerlegungsgleich,
wenn sie dieselbe Winkelsumme haben.
Zum Begriff Flächeninhalt (für Polygone):
Inhaltsfunktional: Ein Inhaltsfunktional ist eine Abbildung F l der Menge aller Polygone in
die Menge der positiven reellen Zahlen mit
(I) A ∼
= B =⇒ F l(A) = F l(B) (Invarianz)
(A) F l(A + B) = F l(A) + F l(B) (Additivität)
Satz über die Existenz und Einzigkeit von Inhaltsfunktionalen:
Zu einem gegebenen Polygon P (z.B.Dreieck) und einer gegebenen positiven
Zahl a (z.B. 1) gibt es genau ein Inhaltsfunktional mit F l(P ) = a
3.2
Hyperbolische Geometrie der Ebene
37
(Ohne Beweis.)
Folgerungen:
1) A ⊆ B =⇒ F l(A) ≤ F l(B)
z
2) A = B =⇒ F l(A) = F l(B)
3) Ws(D1 ) = Ws(D2 ) =⇒ F l(D1 ) = F l(D2 )
Es ist zweckmäßig, statt der Winkelsumme w eines Dreiecks D die Zahl π − w zu betrachten, sie wird
Defekt von D genannt:
def(D) := π − Ws(D)
Folgerung 3) bedeutet: Es existiert eine im Intervall ]0, π[ definierte reelle Funktion f , so daß F l(D) =
f (def(D)) für alle Dreiecke D gilt.
Eigenschaften von f :
(f1) Für alle x, y ∈]0, π[ mit x + y ∈]0, π[ gilt f (x + y) = f (x) + f (y).
(f2) f ist streng monoton wachsend.
Beweis:
Zu (f1): Dreieck in zwei Teildreiecke zerlegen.
Zu (f2): Man betrachte zwei Halbgeraden mit gemeinsamem Anfangspunkt, fälle Lote von Punkten der
einen Halbgeraden auf die andere und verwende das monotone Fallen der Funktion Π.
Die in (1) genannte Gleichung heißt Cauchysche Funktionalgleichung. Über sie gilt der
Hilfssatz über die monotonen Lösungen der Cauchyschen Funktionalgleichung:
Ist f eine im Intervall ]0, π[ definierte Funktion, die monoton ist und die der
Gleichung
f (x + y) = f (x) + f (y) für alle x, y mit x, y, x + y ∈]0, π[
genügt, so existiert eine Konstante c, so daß f (x) = cx für alle x, y in[0, π[ gilt.
Zum Beweis: Mit c := f (1) folgt die Behauptung zunächst für x ∈ Z, dann für rationale x und schließlich
mittels der Monotonie für beliebige reelle x ∈]0, π[.
Bemerkungen: Statt des Intervalls ]0, π[ ginge auch jedes andere Intervall. - Die Voraussetzung der Monotonie ist wesentlich: Es gibt auch nicht-monotone Lösungen der sc Cauchyschen Funktionalgleichung,
diese sind allerdings nirgends stetig.
Aus dem Hilfssatz über die Cauchysche Funktionalgleichung folgt sofort:
F l(D) = c · def(D)
Wenn man im Sinne einer Normierung die Konstante c gleich 1 setzt, folgt:
Satz über den Flächeninhalt hyperbolischer Dreiecke:
Der Flächeninhalt eines Dreiecks ist gleich seinem Defekt.
Folgerung:
Satz von Bolyai und Gerwien:
Zwei Polygone sind genau dann zerlegungsgleich, wenn sie flächengleich sind.
38
3.3
3.3.1
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Hyperbolische Geometrie in drei Dimensionen
Parallelität im Raum
Zu den Axiomen (R1) bis (R15) der absoluten Geometrie (s.Abschnitt 3.1.2, Seite 24/25) wird das hyperbolische Parallelenaxiom hinzugenommen:
(R16)
Ist g eine Gerade, P ein nicht zu g gehörender Punkt, so gibt es in der P und
g enthaltenden Ebene mehr als eine Gerade durch P , die g nicht schneidet.
Die Parallelität von Geraden im Raum wird so definiert:
Zwei Geraden sind genau dann parallel, wenn sie in derselben Ebene liegen und in dieser
Ebene parallel im Sinne von Abschnitt 3.2.1 sind.
Es folgt: Jede Ebene des dreidimensionalen hyperbolischen Raumes ist eine hyperbolische Ebene im Sinne
von Abschnitt 3.2 dieser Vorlesung.
Im Hinblick auf das Senkrechtsein von Geraden und Ebenen in der absoluten Geometrie sind folgende
Sachverhalte wichtig, dabei seien U, V, W Ebenen, g, h Geraden und P ein Punkt:
1) U ⊥ V ⇐⇒ σV (U ) = U , U 6= V . Folgerung: V ⊥ U .
2) g ⊥ U ⇐⇒ σU (g) = g, gnicht in U enthalten.
3) g ⊥ U, h ⊂ U, U ∩ g ∈ h =⇒ g ⊥ h.
4) U ⊥ V, P ∈ U =⇒ das Lot von P auf V ist in U enthalten.
5) U ⊥ V ⇐⇒ U enthält eine zu V senkrechte Gerade.
6) U ⊥ V
=⇒ U ⊥ (V ∩ W ), falls V ∩ W 6= ∅.
U ⊥W
7) U ⊥ V, g ⊂ U, g ⊥ (U ∩ V ) =⇒ g ⊥ V .
Hilfssatz (absolute Geometrie):
Schneiden sich von drei Ebenen je zwei in einer Geraden derart, daß mindestens
zwei von den drei Schnittgeraden ein gemeinsames Lot haben, dann existiert eine
Ebene, die zu allen drei Schnittgeraden senkrecht ist, und zwei beliebige der drei
Schnittgeraden haben ein gemeinsames Lot.
Beweis:
...
........... ...............
..........
.
........... ................... ....................
.
.
...........
.......... .................. .................. ....
.
.
.
.
.
.
.
.
.
...
....... ............... ..............
.
.
.
.
.
.
.
...
.
.
......
...... ..............
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
..
..
..
...
..........
..........
...........
...
.......... ................... .....................
.
.
.
.
.
.
.
.
.
...
............ .................. ................. ..........
...
...
... ...........
....
.
.
.
.
.
.
...
.
.
...
... ..
.....
.
.
.
.
...
.
.
.
.
.
.
.
................
...
...
.
.
.
.
...
...
...........
.
.
.
.
.
.
.
.
.
.
..
...
...
...
...
.... ....
...
...
...
... ....
...
.
...
...
.
...
...
...
....
...
...
...
...
...
...
...
.
.
.
...
...
...
...
...
...
....
...
...
...
...
..........
...
...
.
.
... ........
...
...
... ........
....
...
...
......
...
...
...
...
......
...
.
.
......
...
...
........
...
.
.
......
.
.
.
.
.
.
.
.
.
...
......
...
...
.....
.
.
.
.
.
.
.
.
......
.
.
.
.
.
.
.
...
...
......
......... ..............
.
.
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
......
...
......
..... ................
.
.
.
.
.
.
.
.
.
.
......
.
.
.
.
.
.
.
.
...
..
...
.....
.....
......
.
.
.
.
.
.
.........
.
...
.
.
.............
....
.
......
.
.
.
.
.
......
...
.
.
.........
.
.
.
.
.
.
.
... ............
......
.........
.
.
.
.
.
.
.
.
.
.
.
.
.
......
...
......
.......
.
.
.
.
.
.
.
.
......
.
.
.
.
.
.
.
.
.
...
.....
......
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
......
...
...
.......
......
.........
... ..................
......
.........
...........
.........
......
.........
......
.........
.........
.
......
.
.........
.
.
.
.
.
.
.
.
...
......
.........
......
.........
......
.........
......
.........
......
.........
.
.
.
......
.
.
.
.
.
......
......
......
.........
...... .................
............
l
V
U
Die Ebenen seien U, V, W und l sei
das gemeinsame Lot von
U ∩ V und U ∩ W .
T := Ebene durch l mit T ⊥ U , also
T ∩ U = l.
7) =⇒ T ⊥ U ∩ V, T ⊥ U ∩ W .
5) =⇒ T ⊥ V, T ⊥ W .
Wegen U ∩ W ⊥ T folgt aus 3): U ∩
W ⊥ V ∩ W,
also: T ∩W ist gemeinsames Lot von
U ∩ W und V ∩ W .
Analog: V ∩ W und V ∩ U haben ein
gemeinsames Lot.
W
Nun wird das hyperbolische Parallelenaxiom hinzugenommen, und der folgende Hilfssatz bezieht sich auf
hyperbolisch parallele Geraden:
Hilfssatz über parallele Geraden im Raum:
Sind g, h parallele Geraden und P ein Punkt, der nicht in der Ebene von g und h
liegt, so ist die Schnittgerade der Ebene durch P und g mit der Ebene durch P und
h zu g und zu h parallel.
3.3
Hyperbolische Geometrie in drei Dimensionen
39
Beweis:
............
....................
.......
...................
.................
....................
................
....................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..........
............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
............
...................
......................................
...................
..
...................
...
.................
...
......................
.
.
...
...
...
...
...
...
...
...
..
........
.
..............
...
...
..............
...
..
..............
...
..
..............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
... ..
..............
... ...
..............
... ..
..............
.................
... ...
............... ...........
.
.
.
.
.
.
.
.
... ..
.
.
.
.
.
.
.
.
.
...
.
...........
..............................
...
................................. ......
...
...
.......
...
.... ....
...
........
... ....
...
......... .....
... ...
...
................
...
...
................
...
...
...........
................
.
.
.
...
.
.
...
.
.
.
.
.
.
.
.
.
...
.
.
...
...
........
...............
..
........................
...
...
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
...
...
...
..........
.
.
.
.
.
.
.
.
.
.
.
.
.
...
...
.
.
...
...
.
... ..............................
...
..........
..
.
................ ......
...
...
..................
................
...
.. ................... .....
................
...
..............
................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... .. .................
...
...................
. .......
...
...............
...
................
...
................
.................................
....
................
................
................
s
V
h
U
g
U := Ebene durch P und g,
V := Ebene durch P und h,
W := Ebene durch g und h,
s := U ∩ V .
Wäre s∩g ein Punkt S, so wäre auch
S =U ∩V ∩g =U ∩V ∩U ∩W =
U ∩V ∩W = U ∩W ∩V ∩W =
g ∩ h, Widerspruch zur Parallelität
von g und h. Folglich: s und g sind
entweder parallel oder sie haben ein
gemeinsames Lot. Im letzteren Falle
müßten nach dem vorigen Hilfssatz
auch g und h ein gemeinsames Lot
haben, was nicht geht.
Satz über die Transitivität des Parallelseins im Raume:
Für Geraden g, h, k im Raume folgt aus gke h und hke k auch gke k.
Beweis:
Für drei komplanare Geraden g, h, k: Siehe Abschnitt 3.2.2.
Seien g, h, k nicht komplanar.
P : Punkt von k,
U : Ebene durch P und g,
V : Ebene durch P und h.
Nach dem vorigen Hilfssatz ist U ∩ V parallel zum Ende e zur Geraden h und zu g. In V ist aber k die
einzige Parallele durch P zu h, also ist k = U ∩ V , also kke g.
Begriff Geradenbündel (Analog zum Begriff Geradenbüschel aus 3.2.3):
Eigentliches Geradenbündel mit Trägerpunkt A := Menge aller Geraden durch den Punkt A.
Parallelenbündel zum Ende e := Menge aller Geraden, die zueinander zum Ende e hin parallel sind.
Überparallelenbündel zur Basisebene E := Menge aller zur Ebene E senkrechten Geraden.
Wie in 3.2.2 können Fernpunkte als Äquivalenzklassen der Relation parallel“ in der Menge aller Halbge”
raden definiert werden. Sie können auch als neue“ Punkte aufgefaßt werden, die zur Menge der Punkte
”
( eigentliche Punkte“) hinzugefügt werden derart, daß
”
1. jeder Geraden genau zwei Fernpunkte hinzugefügt werden und
2. zwei verschiedene Geraden genau dann ein und denselben Fernpunkt hinzugefügt bekommen, wenn
sie parallel sind, und
3. jede Ebene diejenigen Fernpunkte hinzugefügt bekommt, die zu den in ihr enthaltenen Geraden
gehören.
Es gelten die Inzidenzaxiome (R1) bis (R4) auch dann, wenn die Menge der Fernpunkte zur Punktmenge
P hinzugefügt wird. Axiom (R5) ist dahingehend zu ergänzen, daß der Durchschnitt zweier Ebenen auch
genau ein Fernpunkt sein kann.
Parallelität von Gerade und Ebene bzw. zwei Ebenen:
Eine Gerade und eine Ebene heißen parallel, wenn sie mindestens einen gemeinsamen Fernpunkt haben.
Zwei verschiedene Ebenen heißen parallel, wenn sie genau einen gemeinsamen Fernpunkt haben.
Folgerungen:
1. Zwei verschiedene parallele Ebenen haben kein gemeinsames Lot.
2. Die Parallelität von Ebenen ist keine Äquivalenzrelation.
40
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Satz über parallele Ebenen:
Ist E eine Ebene, g eine zu E parallele, nicht in E enthaltene Gerade, so gibt es genau
eine Ebene, die g enthält und die zu E parallel ist.
Beweis:
U : Ebene durch g, senkrecht zu E,
E 0 : Ebene durch g, senkrecht zu U .
E 0 und E haben einen Fernpunkt von g gemeinsam.
Annahme: P sei ein weiterer gemeinsamer Punkt von E und E 0 . P liegt nicht in U , denn U ∩ E 0 ∩ E =
g ∩ E = ∅.
.
..........
........ ....
........
...
........
...
.......
.
.
.
.....
.
.
.
...
.
.
.. ..
........
...
....... ....
........
.
.
.
.
........
.
.
...
..
.
........
......
.
.
.
.
.
.
.
.
.
.
.
.
...
.
........
........
.....
...
........
........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
. ..........
......
.
.
.
.
.
.
..
.
.
.
.
........
....
.
.
.
.
.
.
.
.
.
.
......
.
.
.
.....
..... .........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
......
.....
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
.
.
.
......
....
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
......
...
.....
.
.
.
.
.
...
.
.
.
.
.
.........
.
.
......
......
.......
...
....
........
.......
.... ....................
...
...
........
.
.....
........
...
.......
............
....................
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
......
....
..... ...
.
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
....
....
.... ...
........
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
........
........
........
........
....
....
........
.............
.......
........
..
... ..............
.......
........
........
. ..
....... ...
........
........
...............
.......
.
....... .. ...............
.
.
.
.
.
.
.
.
.
.
.
.
......
.......
........
......
............
........
........
......
........ ........
........
........
......
....... .... ............
......
........
........
........
......
..
......
....... ..
........
.
.
........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
.
.
.
.
.
......
.
.
.
.
.
......
.........
...
.....
..... ....
.....
.
.
.
.
.
.
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.............
. ............
......
.
.....
.
.
.
.
.
.
.
.
.
.
......
.
.
.
.
.
.......... ..
.
.....
.
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
......
....
..... ...........
.
.
.
.
.
..
.
....
.
............
......
......
.
......
.
.
........
.
.
.
.
.
.
.
......
....
........
.
.
.
.
.
.
..
.
.
.
.
.
.
......
.
.
.
.
.....
.....
.
.
.
......
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
......
..
........
........
......
........
...... .... ..............
...... .. ........
........
.........
........
......
........
.
.
.
.
.
.
......
.
......
........
......
........
......
........
......
........
......
........
.
.
.
.
.
......
.
.....
......
........
......
........
......
........
......
.....................
..
U
g
E
E
und U ∩ E 0 ist g. Das Spiegelbild von P bezüglich der Spiegelebene U ist ein von P verschiedener Punkt
∈
/ g, aber ∈ E ∩ E 0 . Also enthält E ∩ E 0 mindestens zwei Punkte und einen dazu nicht kollinearen
Fernpunkt, d.h. E = E 0 , im Widerspruch zur Voraussetzung.
Es bleibt zu zeigen, daß jede weitere Ebene durch g notwendig E in eigentlichen Punkten schneidet.
00
..
..... E
.....
Sei E 00 eine weitere Ebene durch g, sie bil.....
.
.....
.....
.....
.....
.
.
.
.
.....
.....
.....
.....
.....
.
.
.
.
..
.....
.....
..................................................................................................................................................................................
0
............... ....
.
.
.
.
.
.
..... ... ...
....... ....
.
....... .....
....
....... .........
.
.
.
.
.
.
.
.
....
........
.....
.....
........
...
.....
........
.....
...
.........
.....
.........
.
.
...
.
.
.
.
.
.
.
.
.
.
.
..
...
.
.
.......................
.
.
.....
..
.. .
.
.
.
.
...
.
.....
...
.
.
..
.
.
...
.
.........................................................................................................................................................................................................................................................
.
.
.
.
.
in der Ebene V
g
E
d
h
3.3.2
E
det mit U einen Winkel α < π2 . In jeder zu
h := E ∩ U senkrechten Ebene V schneiden E
und E 0 zwei Geraden mit gemeinsamem Lot
(= Schnitt mit U ) aus. Da es auf g einen Punkt
gibt, dessen Abstand d von h kleiner als ∆(α)
ist, also Π(d) > α, schneiden sich in der Ebene
V durch einen solchen Punkt von g die Spurgeraden von E und E 0 , also auch die Ebenen
E und E 0 .
Kugeln im weiteren Sinne und eine räumliche Herleitung der Pentagramma-Kette
Definition Kugel, Grenzkugel, Abstandsfläche:
Es sei B ein Geradenbündel, P ein beliebiger Punkt. Die Menge
k := {X : X = σg (P ), g ∈ B}
heißt
a) Kugel(fläche) mit Mittelpunkt M ,
b)
c)
Grenzkugel(fläche) zum Ende e,
Abstandsfläche zur Basisebene E,
falls B ein eigentliches Geradenbündel mit
dem Trägerpunkt M ist,
falls B ein Parallelenbündel zum Ende e ist,
falls B ein Überparallelenbündel mit der
Basisebene E ist.
3.3
Hyperbolische Geometrie in drei Dimensionen
41
Folgerungen:
1) Eine Geradenspiegelung kann als Produkt zweier Ebenenspiegelungen an zueinander senkrechten Ebenen dargestellt werden. Folglich kann man in obiger Definition statt der Geradenspiegelungen auch die
Ebenenspiegelungen an Ebenen durch M im Falle a), an Ebenen durch den Fernpunkt e im Falle b) und
an Ebenen senkrecht zur Basisebene E verwenden.
2) Die Schnitte von Kugeln i.w.S. mit Ebenen, die wie unter 1) beschrieben mit den definierenden Geradenbündeln zusammenhängen, sind Kreise i.w.S., im Fall a) also gewöhnliche Kreise, im Fall b) Grenzkreise und im Fall c) Abstandslinien.
3) Die Kugeln i.w.S. haben die unter 1) genannten Ebenen als Symmetrieebenen, bei Spiegelungen an
diesen Ebenen gehen sie jeweils in sich selbst über.
Die “Innere Geometrie“ auf den Kugeln im weiteren Sinne:
Betrachtet man Punktmenge einer Kugel i.e.S. als Grundmenge und die in Folgerung 2) genannten ebenen Schnitte als “Geraden“ sowie die Kongruenztransformationen des hyperbolischen Raumes, die die
betreffende Kugel i.w.S. in sich selbst überführen, als Bewegungsgruppe, so erhält man jeweils eine ebene
Geometrie, die innere Geometrie diese Kugel i.w.S. Es gilt:
a) Die innere Geometrie einer gewöhnlichen Kugelfläche ist die sphärische Geometrie, wie auf einer
Kugelfläche im dreidimensionalen euklidischen Raum.
b) Die innere Geometrie einer Grenzkugel ist die euklidische Geometrie der Ebene.
c) Die innere Geometrie einer Abstandsfläche ist die hyperbolische Geometrie der Ebene.
Die Behauptung c) ergibt sich daraus, daß die die “Geraden“ definierenden Schnittebenen in der Basisebene gewöhnliche Geraden ausschneiden, und bei den die Abstandsfläche festlassenden Kongruenztransformation die Basisebene fest bleibt.
Zum Beweis der Behauptung b) genügt es nachzuweisen, daß die auf einer Grenzkugel liegenden Grenzkreise das euklidische Parallelenaxiom erfüllen. Lezteres folgt aber sofort aus dem Satz über parallele
Ebenen.
Folgerung aus b): Die Summe der Kantenwinkel eines Paralleldreikants (= konvexe Hülle dreier zum
gleichen Ende paralleler, nicht komplanarer Ebene) ist π.
Räumlicher Zugang zur Dreieckskette des pentagramma mirificum:
Es sei ABC ein bei C rechtwinkliges Dreieck (Seiten und Winkel in üblicher Weise bezeichnet), l sei das
Lot auf die Ebene des Dreiecks im Punkte A, E ein Ende dieses Lotes, und es werden die zu diesem
Ende parallelen Halbgeraden mit den Anfangspunkten B und C betrachtet. Die Punkte A, B, C und der
Fernpunkt E bilden die Ecken eines asymptotischen Tetraeders. Seine Kantenwinkel sind
E
...
..............................................
...
.. ..... ....
.... .....
.
.....
.
.
.... ...
...
.... .....
.
...
.
.
.
... ......
...
.
.
.
.
...
... ......
.
.
.
.
...
... ......
.
.
.
.
..
...
.
.
.
.
.
.....
.
.
.
....
....
.
.
.
.
.
.
....
..
...
.
.
.
.
.
.
...
.
.
..
...
.
.
.
.
...
.
.
.
.
...
....
.
.
.
...
.
.
.
.
...
...
.
.
...
.
.
.
.
.
.
...
...
...
.
.
.
.
.
.
.
.
...
..
.
.
.
.
.
.
.
.
.
.....
...
...
.
.
.
.
.
.
.
...
.
.
...
...
.
.
.
.
.
...
.
.
.
.
...
....
.
.
.
.
.
.
.
.
.
.
........................
...
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...................................................................................................................................................................................
.
.
.
.
.
.
.
.
.
.
... .....
...........
.....
............
.....
.
.............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
............
...
.....
............
...
......
............
...
............
......
...
............
......
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
...
1
1......
..
............
............... .....
............
......... .........
...........
... .... ..........
............
... ...........................................
.
.
.
.........................
...............
Längs Kante
AE :
00
BE :
00
CE :
π
2
00
AB :
π
2
00
AC :
π
2
00
BC :
Π(b)
C
A
C
B
E
A1
α
π
2
−α
Betrachtet man eine Kugel mit Mittelpunkt B, so schneiden die Halbgeraden
BC + , BE + , BA+ auf ihrer Oberfläche ein
sphärisches Dreieck C1 E1 A1 aus.
Seine Seiten und Winkel sind:
<
) C1
= Π(b)
42
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
<
) A1
=
<
) E1
=
_
A1 C1
_
A1 E1
_
E1 C1
π
2
π
−α
2
= β
= Π(c)
= Π(a)
Also gibt es eine Zuordnung von ebenem rechtwinkligen Dreieck und sphärischem rechtwinkligen Dreieck
mit den Stücken
−→
(a, b, c, α, β) [eben]
(Π(c), β, Π(a), Π(b),
π
− α) [sphärisch] ,
2
und umgekehrt gibt es eine Zuordnung
(r, s, t, u, v) [sphärisch]
−→
(∆(t), ∆(u), ∆(r),
π
− v, s) [eben] ,
2
Kombiniert man diese Zuordnungen noch mit einer Vertauschung der Katheten im sphärischen Dreieck,
so bekommt man die Folge
(a, b, c, α, β) [eb.]
−→
−→
π
− α, Π(b)) [sph.]
−→
2
π
π
(a, ∆( − α), ∆(β),
− Π(b), Π(c)) [eb.] ,
2
2
(β, Π(c), Π(a),
und dies zweite ebene rechtwinklige Dreieck ist eines, das in der Kette des Pentagramma in 3.2.5 vorkommt, so daß diese Kette hier neu hergeleitet ist.
Auch die Zuordnung von ebenem rechtwinkligen Dreieck und dreirechtwinkligem Viereck läßt sich auf
diese Weise herstellen: Man errichte auf der Ebene des Vierecks in der dem spitzen Winkel gegenüberliegenden Ecke eine Senkrechte und nehme dazu die Parallelen durch die drei anderen Viereckseckpunkte.
Auf einer Kugel um den Scheitel des spitzen Winkels entsteht durch diese Parallelen ein sphärisches
rechtwinkliges Dreieck, das mit den Vierecksstücken zusammenhängt und von dem ausgehend man nach
obiger Zuordnung ein ebenes rechtwinkliges Dreieck bekommt (Einzelauführung: Übungsaufgabe).
3.4
3.4.1
Hyperbolische Trigonometrie
Die Parallelwinkelfunktion
Voraussetzungen und Bezeichnungen:
Grenzkreisbögen haben meßbare Längen,
auf Grenzkugeln gilt die euklidische Geometrie,
_
Grenzkreisbögen mit den Randpunkten X, Y werden mit XY bezeichnet,
Grenzkreisbögen und ihre Länge werden mit denselben Variablen bezeichnet.
Definition: koaxiale Grenzkreisbögen sind Grenzkreisbögen, die auf zwei Grenzkreisen liegen, die zum
gleichen Fernpunkt gehören und die von denselben beiden parallelen Geraden durch diesen Fernpunkt
begrenzt werden.
Hilfssatz 1: Ein Grenzkreisbogen werde in n kongruente Teilbögen zerlegt. Die durch die Teilpunkte
gehenden Geraden des zum Grenzkreis gehörenden Parallelenbüschels erzeugen dann auf jedem zum
gleichen Parallelenbüschel gehörenden Grenzkreis ebenfalls n untereinander kongruente Grenzkreisbögen.
Beweis: Spiegelungen an den Parallelen durch die Teilpunkte führen die Teilbögen jeweils ineinander über.
Hilfssatz 2: Sind p und q zwei Bögen auf einem Grenzkreis, und sind auf einem weiteren Grenzkreis p0 zu
p und q 0 zu q koaxial, dann gilt für die Bogenlängen
p
p0
= 0.
q
q
3.4
Hyperbolische Trigonometrie
43
Beweis: p in n kongruente Teilbögen der Länge
0 ≤ s < 1 und
p
n
q=m
zerlegen. Dann existieren m ∈ N und s ∈ R mit
p
p
+s .
n
n
Mit Hilfssatz 1 folgt hieraus
q0 = m
p0
p0
+ s0 mit 0 ≤ s0 < 1
n
n
Es folgt
q
s
q0
s0
m
= − = 0− ,
n
p n
p
n
hieraus folgt mittels Grenzübergang n → ∞ die Behauptung.
Hilfssatz 3: Es seien b1 , b01 mit b1 > b01 zwei koaxiale Grenzkreisbögen auf zwei Grenzkreisen zum Ende
e, ferner b2 , b02 zwei weitere koaxiale Grenzkreisbögen mit b2 > b02 auf zwei weiteren Grenzkreisen zum
gleichen Ende e derart, daß b1 von b01 denselben Abstand hat wie b2 von b02 . Dann gilt:
b2
b1
= 0.
0
b1
b2
..
............
...........
............
.............
.
.
.
.
.
.
.
.
.
.
.
... ..
.............
..
............ ....
...
...........
..
...
............
..
...
............
.
.
.
.
.
.
.
.
.
.
.
.
..
...
.......
.
.
.
.
.
.
.
.
.
.
.
.
... 1
..
........
.
.
.
.
.
.
.
.
.
.
.
..
...
0....
..
...........................
.
..
..
...
...........................................
1
..
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
..............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
..............
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.............
... ...........................................
...
...........
...
................
...
.......................................................
...........................................................
..... ............................................................. 0 ...
..
...
...
..
... .......................................................................2
................................2
....................................................................................
.........
b
b
b
b
Beweis:
Durch eine Grenzdrehung kann man erreichen,
daß b1 von Geraden g, h begrenzt wird und b2
von h und einer Geraden k ⊂ hg − , dabei sind
g, h, k zum Ende e parallel. Dann verschiebe
man den Bogen b1 längs h so, daß er an b2
anschließt, wegen der Voraussetzung schließt
dann b01 an b02 an, und mittels Hilfssatz 2 ergibt
sich die Behauptung.
Folgerung:
Das Längenverhältnis zweier koaxialer Grenzkreisbögen ist nur von deren Abstand abhängig. Also gibt
es eine Funktion f , die dem Abstand zweier Grenzkreisbögen ihr Längenverhältnis zuordnet (längerer zu
kürzerem). Diese Funktion hat folgende Eigenschaften:
.
...
............
... ............
......
..
.
......
.........
...... 3
.....
... ...........
.....
......
..
.
.....
......
..
.....
.
.....
.....
..
.
.
.
.
.....
.
.... .........
.
.
.
.
........
.....
. ..
...
.....
2
.
..... .................
..
.
........... .......
...
............
...
..... ...
..... .....
...
.............
.
..
.
.
.
.
..
..... .....
......
..... .....
..... ....
... ............
..... ......
......
...
..............
.
.....
.
..
.
.
.
1 ..............................
...
.. ..
...
.............
...
.....
..
.....
.....
.
.
.
.
.....
.....
b
b
y
b
1) f ist streng monoton wachsend,
2) f (0) = 1,
3) f (x + y) = f (x) · f (y),
denn es ist
x
f (x + y) =
b3
b3 b 2
=
·
= f (x) · f (y)
b1
b2 b 1
Hilfssatz 4: Über die monotonen Lösungen der Funktionalgleichung f (x + y) = f (x)f (y)
Ist f eine im Intervall I := [0, ∞[ definierte reelle Funktion mit
1) f (x + y) = f (x) · f (y) für alle x, y ∈ I,
2) f (0) = 1,
3) f ist in I streng monoton wachsend,
dann existiert eine positive Konstante c0 , so daß für alle x ∈ I gilt:
f (x) = ec0 x .
Beweis: Analog zum Beweis des Hilfssatzes über die monotonen Lösungen der Cauchyschen Funktionalgleichung in Abschnitt 3.2.6.
Aus der Folgerung zu Hilfssatz 3 ergibt sich nun mittels Hilfssatz 4 der
44
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Satz über das Längenverhältnis koaxialer Grenzkreisbögen:
...
...
..
...
...
...
...
...
..
.
...
...
...
..
...
..
...
...
... ............................... ...
........ .....
.....
...
... ...
...
... ...
...
... ..
...
.. ....
.
...
... .....
...
... .....
...
... ...
...
.... ....
...
........................................ ......
...
..
...
...
...
...
...
..
.
...
...
...
...
...
..
.. .
....
.......................................
..
a
b
r
Es gibt eine positive Konstante c0 , so daß gilt: Sind a und b zwei
koaxiale Grenzkreisbögen mit a ≥ b, die voneinander den Abstand
r haben, so gilt
a
= ec0 r .
b
Das heißt insbesondere, daß das Längenverhältnis zweier koaxialer
Grenzkreisbögen nur von deren Abstand abhängig ist.
Die Längeneinheit wird so gewählt, daß die im letzten Satz genannte Konstante c0 den Wert 1 hat.
Darstellung der Parallelwinkelfunktion Π durch elementare Funktionen:
Es soll folgender Satz bewiesen werden:
Satz über die Parallelwinkelfunktion:
Für jedes x gilt
Vereinbarung:
Π(x) = 2 arctan e−x .
.......
..
Π(x)
90.◦.............
...
80.◦.................
◦..... .....
70........ .....
.
60.◦........... ........
◦..... ......
Graph der Parallelwinkelfunktion
50....... ....
.
.
40.◦........... ........
..
.
..
..
30.◦..........
...
...
◦.....
...
20........
...
....
....
◦....
.....
......
10.........
........
..
x
.............
..
...........
.
.........................................................................................................................................................................................................................................................................................................................................
....
..
.
1
5
10
Zum Beweis zunächst zwei Hilfsätze:
Hilfssatz 1: Für zwei beliebige parallele Geraden
g, h mit dem gemeinsamen Fernpunkt E hat der
Grenzkreisbogen zum Ende E, der von g und h
begrenzt wird und der durch den Fußpunkt desjenigen Lotes verläuft, welches von dem von E verschiedenen Fernpunkt von g auf h gefällt wird,
eine universelle, nicht von g und h abhängige
Länge.
Beweis: Die Behauptung aus der Kongruenz zweier beliebiger Parallelstreifen und der Invarianz
des Parallelseins und des Senkrechtseins bei Kongruenztransormation.
.
... .
... ...
... ....
...
..
.
..
...
....
...
..
..
.
.
.
..
.....
...
...
...
...
.......
...
..........
...
................
.
.........
.......
.
.
..........
.
...... .....
........
..
.
.
.
.
.
.
.
.
.
.
.
.
.
..... ..
.
...
..... ..
........
...
........
........
...
.......
.......
...
..... ... .............
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..........
...
......
..
.......
...
......
...
......
.
.
...
.
.
.
.
.
......
...
.....
...
.....
.....
...
.....
.
.
...
.
.
.
.
.....
...
.....
...
.....
....
...
.....
..
.
.
.
.
.
.
.
.....
...
....
...
.....
...
.....
..
....
.
.
.
.
.
..
...
...
...
...
...
...
...
.
.
..
Bezeichnung: Die in Hilfssatz 1 genannte Bogenlänge wird mit b0 bezeichnet.
Hilfssatz 2: Ein Satz über euklidische rechtwinklige Dreiecke: Sind (a, b, c, α, β) die Stücke eines euklidischen rechtwinkligen Dreiecks, so gilt
tan α =
a
.
b+c
3.4
Hyperbolische Trigonometrie
45
Beweis: Das Dreieck habe die Ecken A, B, C, rechter
Winkel bei C.
Sei D ∈ AB − mit |AD| = |AC|.
Mit δ :=<
) ADC wird die Winkelsumme im gleichschenkligen Dreieck ADC gleich 2δ + π − α = π, also
δ = α2 .
In B wird das Lot auf g(AB) errichtet, es schneide
g(DC) in F .
Der Winkel <
) BCF ergänzt sich mit <
) ACD = δ zu
π
,
ebenso
wegen
der
Winkelsumme
im
Dreieck der
2
Winkel <
) BF D. Folglich sind beide Winkel gleich
groß, das Dreieck CBF ist gleichschenklig. Im rechtwinkligen Dreieck DBF ist nun
tan δ = tan
α
a
=
.
2
b+c
D
.......
..........
... ........
... ........
.......
...
.......
...
.......
...
.......
...
.......
...
.......
...
.....
...
.... ............
...
.......
...
...
.......
...
...
.......
...
.......
...
.......
...
.
.
.......
...
.......
...
....
.......
.
...
.
.......
.
...
.
.......
.
...
.
.......
.
.
...
.......
... ....
.......
... ..
.......
.......
... ...
.......
... .........
....
..... ..
............................................................................................................................................
...... ...
... .........
.......
... .......
.
.
.
..
............
......
...
...
...
...
..
.
.
...
.
...
...
...
...
...
...
...
..
.
.
...
..
...
...
...
...
...
...
...
...
...
.
.
...
...
...
...
...
...
...
...
...
.
... ........... ...
..........................
.................
... ..
......
.
≈
A
≈
C
B
F
Zur Herleitung eines Formelausdrucks für Π(x) sei eine Strecke [AB] der Länge x gegeben. In B wird
auf g(AB) ein Lot errichtet, es habe den einen Fernpunkt E, dieser wird mit A verbunden, so daß
<
) EAB = Π(x) wird. Auf der Ebene des asymptotischen Dreiecks ABE wird in A ein Lot errichtet, E 0
sei einer seiner Fernpunkte. Dieser wird mit B und mit E verbunden. Auf der zum Fernpunkt E 0
E. 0
..........................
.......................
... .
...
...
...
gehörenden Grenzkugel durch A schnei...
...
..
...
...
...
....
...
...
....
det BE + einen Punkt B 0 und EE 0+ einen
...
...
.....
...
.....
....
.....
.
...
...
.....
Punkt C aus. Das Grenzkreisbodendreieck
...
...
.....
.
......
...
...
......C
...
...
......
.
AB 0 C ist ein euklidisches rechtwinkliges
...
...
..... ......
...
...
....... ............
.
.
.
........D
.
.
...
...
. ...
.
............
.
.
Dreieck mit rechtem Winkel bei B 0 . Ferner
.
.
.
.....
.
.. .
. .
_
_
sei BD der zu B 0 C koaxiale Grenzkreisbogen.
Es gilt dann
_
...
...
... ..
.. ...........................................................................................
...
...
..... ..
...
...
...
...
..... ....
...
..
... .........
...
..
..
...
.
.
... ......
...
.
.
.
....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
.
.
...................
.... ....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
..................................
.
.... ...
.
...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
..
.. ............. ..........................................................
.
.
.
.
.
.
.
.
.
.
.
. ...
.......................................................................................
..........
0
...
......
..........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
......
...
.......
.
.
.
.
.
.
......
.
.
.
.
.
.
...
...
......
..........
...
...
......
..........
......
...
...
..........
......
...
..........
...... ....
...
..........
.
.
.
.
.
.
.
.
.
.
.
...... ...
.
.
..............................................
.........................
....
E
B
A
x
_
AC=BD= b0
B
Ferner ist im Grenzkreisbogendreieck AB 0 C der Winkel bei A gleich Π(x), also nach Hilfssatz 2:
_
B0C
Π(x)
= _
tan
_
2
AB 0 + AC
_
_
Es sei y := |BB 0 |. Dann folgt B 0 C=BD ·e−y = b0 e−y , also
tan
Π(x)
b0 · e−y
= _
2
AB 0 +b0
(∗)
Auf die Ebene ACE wird die Drehung δ um die Achse g(AE)0 mit δ(AE + ) = AB − angewendet. In der
Ebene ABE 0 ergibt sich folgendes Bild:
46
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
E0
δ(C), A, B 0 liegen auf einem Grenzkreisbogen!
Man fälle das Lot von δ(E) auf g(BB 0 ),
Fußpunkt sei B 00 . Der durch B 00 verlaufen-
. .. ..
... ... ....
... ... .....
....
.... .....
....
....
.. ..
....
... ....
....
....
.... ....
.....
... ...
.....
... ...
.....
.....
... ....
.....
...
...
.....
...
.....
...
...
.....
...
.....
...
.
.
.....
...
..
.....
.
...
.....
000 ......
00
...
.
.
.
.
.
.
.
.
.
.
.
.
.................................................................................................
..
.
.....
.
.
.
.
.
.
..
.....
....
..
.
.
.
.
.
.
.
.
.
.....
..
......
.....
....
...
......
.....
...
...
......
.....
....
......
..
.....
......
.....
.
.
.
.
.
.
.....
.
.
.
.
.
.
. ........
...
.....
.
.
.
0
.
.
.
.
.
.
..........
..
....
.
.
.
.
.
.
........
.
.
... ......
...... ....
.
.
.
.
.
.
..... .........
.
.
.
.
.
.
.
.
.
.
.
.....
...
.....
....
......
.
.....
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.....
... .........
....
......
.....
.....
...................
.....
.......
.....
...........
.....
....
......
.....
..........
.....
......
...
.....
..........
.......
.........
.
.
.
.
.
.
....
.
.
...
.
.
.
.
.............
.
.
.
.
.
.
....
.................................................................................................................................................................................................................................................................
B
B
δ(C)
δ(E)
_
de Grenzkreisbogen B 00 B 000 zum Ende E 0
hat die Länge b0 . Es wird
|B 00 B| = ∆(<
) ABE 0 ) = ∆(Π(x)) = x,
B
A
x
und nach dem Satz über koaxiale Grenzkreisbögen wird
B
_
_
B 0 A + Aδ(C)
_
B 00 B 000
_
0
B A +b0
b0
= ex−y
= ex−y ,
mit Formel (∗) ergibt sich
tan
Π(x)
b0 e−y
= x−y
= e−x ,
2
e
· b0
also
Π(x) = 2 arctan e−x
Es ist zweckmäßig, die Hyperbelfunktionen heranzuziehen:
sinh x =
ex − e−x
,
2
cosh x =
ex + e−x
,
2
tanh x =
sinh x
,
cosh x
coth x =
Dann wird
1
tanh x
Π(x) Π(x)
2e−x
2
1
+
)=
= x
=
−2x
−x
2
2
1−e
e −e
sinh x
Analog berechnet man die übrigen trigonometrischen Funktionen der Parallelwinkelfunktion und kommt
insgesamt zu folgenden Gleichungen:
tan(Π(x)) = tan(
tan Π(x)
=
cot Π(x)
cos Π(x)
=
=
sin Π(x)
=
1
sinh x
sinh x
tanh x
1
cosh x
sinh ∆(α) =
cosh ∆(α) =
tanh ∆(α) =
coth ∆(α) =
cot α
1
sin α
cos α
1
cos α
3.4
Hyperbolische Trigonometrie
3.4.2
47
Trigonometrie am rechtwinkligen Dreieck
Satz über Strecken an Grenzkreisbögen:
_
b =AB sei ein
Grenzkreisbogen < b0 , die Achse durch A sei g, die
Achse durch B sei h.
F := Lotfußpukt von A auf h,
das Lot von A auf g schneide h in D,
t := |AD|, u := |DB|, y := |AF |
Dann gilt:
.....
.....
.....
.....
.....
.....
.....
.....
.....
.....
...
.............
..... .. ...........
......
........ ....
.
.
.......
....... ....
.
.......
.
.......
... .. ...
........
..
.... ....
.
.
........
.
.
.........
... ...
....
.
.
..........
..
.. ...
.
.
...........
.
.
...
..............
..
.
.
.
.
....................
.
.
...
.
.
......................
.
.
.
.
...
..
.
.
.
.
.
.
.
....
...
.
.
.
.
.
..
...
.
.
.
.
.
.
.
...
..............................................................................................................................................................................................................
....................................
..
A
t
b
g
y
h
b
b
D
= b0 tanh t
= b0 sinh y
= cosh t
u
B F
eu
Beweis:
Von den Fernpunkten der Geraden g(AD) werden die Lote auf h gefällt, ferner die Enden von g(AD) wie in
folgender Figur mit denen von g bzw. h verbunden, außerdem werden die eingezeichneten Grenzkreisbögen
_
_
_
_
HL, DJ, GK und CM betrachtet:
...
.......... ..............
.. .... .... ..... ..
.
.... .... ....
.. .. ..
... ... ....
.... .... ....
...
.. ..
...
... ...
...
... ...
...
.... ....
...
... ...
...
...
... ...
...
... ...
.
... ...
..........
.
. ..
.
.
.
.
.
..
...
.... ..........
....
...
.
. .....
.
.
...
....
...
...
.....
...
.... .........
.
...
.
.
.
.
.
..........
. .... ...
.
..........
.
.
..........
.......
.
.
.. ..... ...
.
.
..........
.
.
... ....
.
. ...
.
..........
.
.
.
.
.
.
.
...
..........
...
.
.....
.
..
.
..........
...
.
.
.
..
..........
...
......
.....
...
..........
...
....
..
...
..........
......
..
...........
..
...
.
.
.
.
.
.
. ....
...
..................... ....
.
.
.
...
.
..
....
................................ ... ....
...
............ ..
...
.
... .
...
.. .................
...
.... ...
.
.
...
..........
.. ...
.
..... ...
.
.
.
...
.
..........
....
..
.... ...
.
.
.
.
.
..
.
.
.
.
.
.......... ....
...
.. ... ...
.....
.
.
.
.
. .. ..
...
..
.
.
.
.
.
.
.
.
.
.
.
.. .. .. ..
..
... ...
...............
.
...
.. ..
......................................................................................................................................................................................................................................
.........
..
...
.............
...
.....
.
.
.
.
.
.
.
.
......
.
...
.
.
......
.......... ..
...
.. ...
.......... ...........
.......
...
... ...
..........
.......
..........
...
.......
... ..
..........
.......
.
.
.
.
.
.. ....
.
.
.
.
.
.
.
.
.
.
.
.
.
...
..
. ...
.......
............
...
...
.......
..........
...
... ............
..........
...
..........
..
..........
...
..........
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
... .
.........
..................... .............. ....
..........
...
...
..........
......
... ..................
... ............
.....
.
.
.
.
.
.
.
.
.
.
.
.........
........
... ...................
... .
.....
M
K
J
A
t
y
H
DB
G
C
Es
wird_
_
_
_
AM =AC=HL=GK= b0 ,
ferner wegen der Symmetrien im Punkte D:
t = |AD| = |HD| und |DG| = |HD|.
Folglich:
_
BC
_
BM
= b0 − b
= b0 · e−(t+u) ,
= b0 + b
=
b0 · et−u .
Durch Addition und Subtraktion ergibt
sich:
2b0
2b
= b0 (e−t−u + et−u ) =⇒ eu
= b0 (et−u − e−t−u ) =⇒ b
=
cosh t,
= b0 tanh t.
L
_
Ferner: DJ= b · eu = b0 sinh t, Übertragung auf b, y ergibt b = b0 sinh y.
Nun sei ABC ein bei C rechtwinkliges Dreieck mit <
) BAC = α, |AB| = c, |BC| = a. F sei der
Lotfußpunkt vom Fernpunkt E von AC + auf g(AB) und es werde Zw(ABF ) angenommen (für Zw(AF B)
ändern sich die folgenden Rechnungen geringfügig, das Ergebnis bleibt; Übungsaufgabe!).
48
3
....
.....
.....
.....
.....
.
.
.
....
.....
.......
.............
........... .........
.
.
.
.
.
.....
......
.....
..... ..
.....
..... ...
.....
..... ...
.....
.....
..... ....
.
.
.
.
.....
... ....
.
......
.
.
.
......
... ...
.
.
.
.
......
.
....
.
2
.
.
......
.
.
.
...
.
......
.
.
.
.
.
......
...
.
.
.
.
.
.
.
......
.
...
.
.
.
......
.
.
.
.
...
......
.
.
.
.
.
.
......
.
...
.
.
.
.
...
.
.
........................................
.
.
.
.
.................
...... ...
.
.
.
.
.
.
.
.
.
.
.
.
.
..................
.
... ... ...
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..................
..................
..... .. ..
...
..................
..... .... ....
..
..................
.....
.. 1
.....
.. ...
.....
...
.. ....
....
.
.
.
.
.
.
.
.
.
.....
..............................................................................................................................................................................................................
F
s
B
u
s
A
s
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Es sei s der von den Achsen g(EB) und g(AC)
begrenzte Grenzkreisbogen durch B zum Ende E,
Der Grenzkreisbogen durch F zum Ende E, der
von g(AC) und g(F E) begrenzt wird, wird durch
g(BE) in die Teilbögen s1 , s2 zerlegt. Dann folgt
aus den Sätzen über koaxiale Grenzkreisbögen
E bzw. über Strecken an Grenzkreisbögen:
C
s
s2
s1 + s2
eu
s
=
=
=
=
=
b0 · sinh a
b0 · tanh(∆(α) − c)
b0 · tanh(∆(α))
cosh(∆(α) − c)
s1 · eu
(1)
(2)
(3)
(4)
(5)
Aus (5), (1) und (4) folgt
s1 = se−u =
b0 · sinh a
cosh(∆(α) − c)
Addition von (2) und Vergleich mit (3) ergibt
b0 · sinh a
+ b0 tanh(∆(α) − c) = b0 · tanh ∆(α).
cosh(∆(α) − c)
Multiplikation mit
cosh(∆(α)−c)
b0
ergibt
sinh a + sinh(∆(α) − c) = tanh ∆(α) · cosh(∆(α) − c).
Durch Anwendung der Additionstheoreme für sinh und cosh und Multiplikation mit cosh ∆(α) kommt
man zu
sinh a cosh ∆(α) = sinh c · (cosh2 ∆(α) − sinh2 ∆(α)),
also zu sinh a cosh ∆(α) = sinh c. Wegen cosh x =
1
Π(x)
folgt hieraus die Formel
sinh a = sinh c sin α.
Zur Herleitung von Beziehungen zwischen anderen drei der fünf Stücke“ eines rechtwinkligen Dreiecks
”
kann man die in 3.2.5 hergeleitete Dreieckskette ausnutzen. Zum Beispiel ergibt Anwendung der eben
hergeleiteten Formel auf das zugeordnete Dreieck
(a, b, c, α, β) −→ (b, ∆(β ∗ ), ∆(α), Π(a)∗ , Π(c))
die Gleichung
π
− Π(a)),
2
das ergibt unter Verwendung der Formeln am Schluss von 3.4.1 die Gleichung
sinh b = sinh ∆(α) · sin(
tanh a = tan α sinh b.
Ferner ergibt die Anwendung der oben hergeleiteten Formel auf das zugeordnete Dreieck
(a, b, c, α, β) −→ (∆(α∗ ), a, ∆(β), Π(c), Π(b)∗ )
die Beziehung
π
− α) = sinh ∆(β) · sin Π(c),
2
und dies ergibt unter Verwendung der Formeln am Schluss von 3.4.1 die Gleichung
sinh ∆(
tan α tan β cosh c = 1.
Weitere Beziehungen zwischen drei Stücken eines rechtwinkligen Dreiecks ergeben sich aus der Dreieckskette auf diese Weise nicht. Der im nächsten Abschnitt dargestellte Zusammenhang mit fünfrechtwinkligen
Fünfecken ergibt dann aber eine Möglichkeit, schnell alle möglichen Beziehungen zwischen drei der fünf
Stücke eines rechtwinkligen Dreiecks aufzuschreiben.
3.4
Hyperbolische Trigonometrie
3.4.3
49
Fünfrechtwinklige Fünfecke
Errichtet man in den Endpunkten der Hypotenuse eines rechtwinkligen
Dreiecks die Lote zu den jeweils anliegenden Katheten (Längen a, b), so
haben diese genau dann ein gemeinsames Lot, wenn a > b∗ gilt bzw.,
damit äquivalent, b > a∗ . Hieraus folgt: Sind x1 , x2 zwei Streckenlängen,
so existiert genau dann ein fünfrechtwinkliges Fünfeck, das zwei aneinanderliegende Seiten mit den Längen x1 , x2 hat, wenn x2 > x∗1 gilt,
und das Fünfeck ist durch x1 , x2
bis auf Kongruenz eindeutig beP5
stimmt.
Es sei P1 P2 P3 P4 P5 ein fünfrechtx2
x3
winkliges Fünfeck, dem Punkt Pi
G
liege die Seite mit der Länge xi
P4
F
gegenüber. Ferner E das Ende P1
von P2 P3+ , F der Lotfußpunkt
von E auf g(P5 P4 ) und G der
x1
x4
Lotfußpunkt von E auf g(P1 P5 ).
Es wird
P4 F
P1 G
= x∗1
= x∗4
x5
P2
P3
a
b
.................................................................
E
und
<
) P4 P5 E
<
) P1 P5 E
= Π(x2 + x∗1 )
= Π(x3 − x∗4 )
Folglich gilt
π
(1)
2
Durch zulässige Permutation der Zahlen 1 bis 5 (Einhaltung des Umlaufzyklus des Fünfecks!) ergeben
sich hieraus noch neun weitere derartige Gleichungen.
Eine ähnlich strukturierte Formel ergibt sich bei Betrachtung eines rechtβ
a
winkligen Dreiecks, wenn man vom En∆(α)
α
de der Trägergeraden der Hypotenuse
α
die Lote auf die Trägergeraden der Ka∆(β) − a
thete fällt und außerdem den Rechtwinkelscheitel mit diesem Ende verbindet.
Es folgt dann mit den traditionellen Bezeichnungen
π
Π(∆(α) + b) + Π(∆(β) − a) =
(2)
2
und analog nach Vertauschung der Katheten:
Π(x2 + x∗1 ) + Π(x3 − x∗4 ) =
Π(∆(β) + a) + Π(∆(α) − b) =
π
2
(3)
Vergleich von (2) und (1) legt nahe zu setzen
x2
x1
:= ∆(α)
:= b
Da im rechtwinkligen Dreieck stets b < ∆(α) ist, folgt die Existenz eines fünfrechtwinkligen Fünfecks mit
zwei anliegenden Seiten der Längen x1 , x2 . Die übrigen Seiten seien in der Reihenfolge ihres Aneinanderliegens x2 , . . . , x5 . Ihre Längen werden jetzt berechnet. Einsetzen von x1 , x2 in (3) ergibt
Π(∆(β) + a) + Π(x2 − x∗1 ) =
π
2
(4)
50
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Aus (1) folgt durch Anwendung der Permutation
1
4
2
3
3
2
4
1
5
5
Π(x3 + x∗4 ) + a) + Π(x2 − x∗1 ) =
die Gleichung
π
2
(5)
Vergleich mit (4) ergibt
x3 + x∗4 = ∆(β) + a
(6)
Setzt man andererseits x1 , x2 in (2) ein, so ergibt sich Π(x2 +
Vergleich mit (1) ergibt
x3 − x∗4 = ∆(β) − a
x∗1 )
+ a) + Π(∆(β) − a) =
π
2,
und der
(7)
Aus (6) und (7) folgt durch Addition und Subtraktion:
x4 = a∗
x3 = ∆(β),
Zur Bestimmung von x5 wird die Dreiecksformel (2) für ein Dreieck aus der Kette zugeordneter rechtwinkliger Dreiecke (vgl. 3.2.5) hingeschrieben, und zwar für das Dreieck (a0 , b0 , c0 , α0 , β 0 ) = (∆(β ∗ ), c∗ , a∗ , Π(b)∗ , α).
Die Beziehung (2) lautet hierfür Π(b∗ + c∗ )Π(∆(α) − ∆(β ∗ )) = π2 bzw. mit den schon berechneten xi :
Π(x1 + c∗ ) + Π(x2 − x∗3 ) =
π
2
(8)
Eine hierzu analoge Fünfeckformel ergibt sich aus (1) durch Anwendung der Permutation
Π(x1 + x∗5 ) + Π(x2 − x∗3 ) =
π
2
1 2
5 1
3 4
2 3
5
4
(9)
Vergleich von (8) und (9) ergibt
x5 = c
Also gilt der
Satz über rechtwinklige Dreiecke und fünfrechtwinklige Fünfecke:
Sind (a, b, c, α, β) die Stücke eines rechtwinkligen Dreiecks, so existiert ein Fünfeck mit fünf rechten
Winkeln, dessen aufeinanderfolgende Seiten die Längen
b∗ , ∆(α), ∆(β), a∗ , c
haben. Diese Längen sind genau die Längen der Hypotenusen der Dreiecke der in 3.2.5 hergeleiteten
Dreieckskette.
Als Folgerung hieraus ergeben sich pentagonometrische Formeln für Fünfecke mit fünf rechten Winkeln.
In folgender Figur sind Fünfeck und zugehörige Dreiecke der Kette eingezeichnet:
a
β
∆(α∗ )
β
c∗
b
∆(β ∗ )
b∗
c
α
Π(a)∗
α
Π(a)∗
∆(α)
a∗
∆(β ∗ )
c∗
Π(b∗ )
∆(β)
Π(b∗ )
∆(α∗ )
Π(c)
Π(c)
a
b
:
3.4
Hyperbolische Trigonometrie
51
Drückt man alle Seitenlängen durch die des Fünfecks aus, kommt man zu folgender Figur:
5∗
3∗
Π(4)
Π(4)
2∗
1∗
1
2
Π(3)
Π(5)
Π(3)
4∗
Π(5)
1∗
4∗
3
5
Π(2)
4
Π(2)
Π(1)
2∗
Π(1)
5∗
3∗
Das ist das Analogon zum pentagramma mirificum in der sphärischen Geometrie.
Die für rechtwinklige Dreiecke hergeleitete Formel sinh a = sinh c sin α wird nun zu einer Gleichung für
fünf-rechtwinklige Fünfecke, denn es ist
π
a = ∆( − Π(x2 ))
2
c = x1
α = Π(x4 ),
also
π
− Π(x2 ))) = sinh x1 · sin Π(x4 ),
2
das ergibt unter Verwendung der Formeln aus 3.4.1:
sinh(∆(
tan Π(x2 )
1
sinh x2
1
cosh x4
1
sinh x1 ·
,
cosh x4
= sinh x1 ·
=
also
cosh x4 = sinh x1 · sinh x2
(10)
In Worten:
Der hyperbolische Kosinus einer Seite eines fünf-rechtwinkligen Fünfecks ist gleich dem Produkt der
hyperbolischen Sinus der dieser Seite gegenüberliegenden beiden Seiten.
Schreibt man dies für alle fünf Seiten des Fünfecks explizit auf, so ergeben sich außer obiger Formel vier
weitere Formeln für die Stücke des rechtwinkligen Dreiecks, z.B.
cosh ∆(
π
π
− Π(b)) = sinh ∆( − Π(a)) · sinh ∆(β),
2
2
weiter unten werden alle Formeln zusammengestellt.
Um auch für drei aneinanderliegende Seiten des Fünfecks eine Beziehung zu bekommen, schreibt man
Gleichung (10) für die Indextripel (1, 3, 4), (2, 4, 5) und (3, 5, 1) hin:
cosh x1
cosh x2
cosh x3
= sinh x3 sinh x4
= sinh x4 sinh x5
= sinh x5 sinh x1
(11)
(12)
(13)
52
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Multiplikation von (11) und (13) ergibt
cosh x1 cosh x3 = sinh x3 sinh x4 sinh x5 sinh x1
Einsetzen von (12) ergibt
cosh x1 cosh x3 = sinh x3 cosh x2 sinh x1
bzw.
cosh x2 = coth x1 · coth x3 ,
(14)
in Worten:
Der hyperbolische Kosinus einer Seite eines fünf-rechtwinkligen Fünfecks ist gleich dem Produkt der
hyperbolischen Kotangenten der beiden dieser Seite anliegenden Seiten.
Zur Aufstellung aller Formeln für rechtwinklige Dreiecke sind in folgender Tabelle die fünf Seiten des einem
rechtwinkligen Dreieck (a, b, c, α, β) zugeordneten fünf-rechtwinkligen Fünfecks sowie deren hyperbolische
Kosinus, Sinus und Kotangenten zusammengestellt:
i
Seite xi
1
c
2 ∆( π2 − Π(a))
cosh xi
sinh xi
coth xi
cosh c
sinh c
coth c
coth a
1
sinh a
cosh a
3
∆(β)
1
sin β
cot β
1
cos β
4
∆(α)
1
sin α
cot α
1
cos α
5
∆( π2 − Π(b))
coth b
1
sinh b
cosh b
Nun kann man für alle möglichen Fälle der Verknüpfung dreier Stücke eines rechtwinkligen Dreiecks eine
Formel hinschreiben, indem man in (6) und (10) die erforderlichen zyklischen Vertauschungen der Seiten
des Fünfecks vornimmt:
Fall Nr.
Verknüpfte Stücke
Formel
1
Drei Seiten
cosh c = cosh a cosh b
2
Zwei Katheten, ein Winkel
sinh b tan α = tanh a
3
Hypotenus, Kathete, gegenüberliegender Winkel
sinh a = sinh c sin α
4
Hypotenuse, Kathete, anliegender Winkel
tanh c cos β = tanh a
5
Hypotenuse, zwei Winkel
tan α tan β cosh c = 1
6
Kathete, zwei Winkel
cosh a sin β = cos α
3.4.4
Trigonometrie für beliebige Dreiecke
Es seien (a, b, c, α, β, γ) in traditioneller Bezeichnungsweise die Stücke“ eines beliebigen Dreiecks. Durch
”
je drei von ihnen sind die übrigen bestimmt, daher gibt es 15 Gleichungen zwischen je vier Stücken. Diese
teilen sich auf folgende vier Fälle auf: 1) 3 Seiten, 1 Winkel,
2) 2 Seiten, 1 eingeschlossener, 1 gegenüberliegender Winkel,
3) 2 Seiten, 2 gegenüberliegende Winkel,
4) 1 Seite, 3 Winkel.
3.4
Hyperbolische Trigonometrie
53
Zu Fall 3:
Zerlegt man das Dreieck mittels der Höhe zur Seite c in zwei rechtwinklige Dreiecke (bzw. ergänzt sie zu
solchen), dann folgt aus der betreffenden Formel rür rechtwinklige Dreiecke, wenn die Höhe die Länge h
hat:
sinh h = sinh a sin β = sinh b sin α
Hieraus folgt der hyperbolische Sinussatz“:
”
sinh a
sin α
=
sinh b
sin β
Zu Fall 1:
Für die in der Figur angegebenen rechtwinkligen Teildreiecke gilt
cosh a =
cosh b =
cosh h cosh c1
cosh h cosh c2
γ1 γ2
und
a
sinh c1
sinh c2
b
= sinh a sin γ1
= sinh b sin γ2
h
α
β
c1
c2
c
und
tanh h = tanh a cos γ1
tanh h = tanh b cos γ2
Es folgt unter Anwendung des Additionstheorems für den hyperbolischen Kosinus
cosh c = cosh(c1 + c2 ) =
cosh a cosh b
+ sinh a sinh b sin γ1 sin γ2
(cosh h)2
bzw.
cosh c =
=
cosh a cosh b
(tanh h)2
+
sinh
a
sinh
b
·
− cos γ
(cosh h)2
tanh a tanh b
1
cosh a cosh b ·
+ (tanh h)2 − sinh a sinh b cos γ
2
(cosh h)
also
cosh c = cosh a cosh b − sinh a sinh b cos γ
Dies ist der Seitenkosinussatz“ der hyperbolischen Geometrie.
”
54
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Zu Fall 4:
Für die in der Figur angegebenen rechtwinkligen Teildreiecke gilt
cos γ1
cos γ2
=
=
cosh c1 sin β
cosh c2 sin α
γ1 γ2
sowie
a
cos β
cos α
=
=
b
cosh h sin γ1
cosh h sin γ2
h
α
β
und
c1
tanh h
tanh h
=
=
c2
c
sinh c1 tan β
sinh c2 tan α
Es folgt
cos(γ1 + γ2 ) = cos γ1 cos γ2 − sin γ1 sin γ2 = cosh c1 cosh c2 sin α sin β −
cos α cos β
(cosh h)2
bzw.
cos γ
cos α cos β
(cosh h)2
2
(tanh h)
cos α cos β
−
= sin α sin β cosh c − sin α sin β
tan α tan β
(cosh h)2
1
= sin α sin β cosh c − cos α cos β((tanh h)2 −
,
(cosh h)2
=
sin α sin β cosh c − sin α sin β sinh c1 sinh c2 −
also
cos γ = sin α sin β cosh c − cos α cos β
Dies ist der Winkelkosinussatz“ der hyperbolischen Geometrie.
”
3.5
Ein Blick auf kreistreue Abbildungen in der hyperbolischen Ebene
P0
Die Abbildung
x 7→ x∗ := ∆
π
− Π(x)
2
(x ∈ R, x > 0)
x∗
kann in der hyperbolischen Ebene geometrisch realisiert werden:
P
x
a
In Formeln:
sinh ∆
π
π
1
− Π(x) = cot
− Π(x) = tan Π(x) =
,
2
2
sinh x
also
sinh x∗ =
1
.
sinh x
Dies ist offenbar eine involutorische Abbildung einer von a erzeugten offenen Halbebene auf sich.
3.5
Ein Blick auf kreistreue Abbildungen in der hyperbolischen Ebene
55
Die Abstandslininen zur Basisgeraden a gehen wieder in solche
über; die Abstandslinie mit dem Abstand arsinh 1 bleibt punktweise fest.
Das Bild einer Geraden, die mit a ein gemeinsames Lot hat, ist
ein Halbkreisbogen:
a
Diese und eine ganze Reihe weiterer derartiger Abbildungen ergibt sich wie folgt durch eine Konstruktion
im dreidimensionalen hyperbolischen Raum.
Es sei E0 eine fest gewählte Ebene im dreidimensionalen hyperbolischen Raum.
H0 sei einer der beiden von E0 erzeugten Halbräume.
F0 sei die Menge aller Fernpunkte des dreidimensionalen hyperbolischen Raumes, die zu H0 gehören.
X
Eine Abbildung π : F → E0 wird definiert durch
π(X) := Fußpunkt des Lotes von X auf E0
Dies ist offenbar eine Bijektion zwischen F0 und E0 .
π(X)
E0
Es gilt der
Hilfssatz: Eine Teilmenge M von F0 ist genau dann komplanar, wenn π(M ) Teilmenge einer Kreislinie
im weiteren Sinne oder einer Geraden ist.
Beweis:
M ⊂ F0 ist komplanar ⇐⇒ es existiert eine Ebene E mit E ⊃ M .
Hinsichtlich der gegenseitigen Lage von E und E0 gibt es drei Fälle:
1.: E und E0 haben ein gemeinsames Lot,
2.: E und E0 sind parallel,
3.: E und E0 schneiden sich.
Zu 1.:
l
In einer Ebene durch das gemeinsame Lot l entsteht das nebenstehende Bild:
Es wird π(E) eine Kreislinie mit dem Mittelpunkt l ∩ E0 als Mittelpunkt uind dem Radius s∗ , wo s der Abstand zwischen den
Ebenen E und 0 ist, und π(M ) wird eine Teilmenge dieser Kreislinie. – Umgekehrt hat jede Teilmenge dieser Kreislinie ihre Originalpunkte in E ∩ F0 .
E
X
E0
π(X)
56
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Zu 2.:
Z1
Es sei Z der gemeinsame Fernpunkt von E und E0 . Jede Ebene
senkrecht zu E und E0 ist eine Symmetrieebene der Figur E ∪ E0 .
In einer solchen Ebene ergibt sich nebenstehendes Bild:
Alle Punkte π(Z1 ) gehen durch Spiegelungen an den Symmetrieebenen auseinander hervor, sie liegen also auf einem Grenzkreis
zum Ende Z hin. – Umgekehrt liegen die Originale von Punkten
eines Grenzkreises in E ∩ F0 .
Z
π(Z1 )
Zu 3.:
Ist E0 ∩ E eine Gerade s, so zeigt eine Betrachtung in einer Ebene senkrecht zu s, dass für die Punkte
X ∈ E ∩ F0 die Bilder π(X) auf einer Abstandslinie zur Basisgeraden s mit dem Abstand ∆(α) liegen,
wo α der Schnittwinkel von E und E0 ist; für α = π2 ist s selbst das Bild von E ∩ E0 .
Folgerung:
Die Bildmenge der Fernpunkte eines Halbraumes bezüglich einer beliebigen Ebene ist das Innere oder
Äußere eines Kreises im weiteren Sinne oder eine Halbebene oder E0 oder leer.
Mit Hilfe der Abbidlung π wird nun ein spezieller Typ von Abbildungen der Ebene E0 in sich definiert.
Es sei ϕ eine beliebige Kongruenztransformation des dreidimensionalen hyperbolischen Raumes auf sich.
Dann sei κ definiert durch
κ := π ◦ ϕ ◦ π −1
κ wird Kreisverwandtschaft genannt.
Bemerkungen:
1.) Der Definitionsbereich von κ ist i.a. eine echte Teilmenge von E0 , denn Punkte P ∈ E0 mit ϕπ −1 ∈
/ F0
gibt es keine Bilder (extremes Beispiel: ϕ ist die Ebenenspiegelung an E0 ).
Es ist Def(κ) = E0 ∩ π(F0 ∩ ϕ(f0 )).
2.) κ ist genau dann eine Kongruenztransformation, wenn ϕ eine Kogruenztransformation des Hyperbolischen Raumes ist, die E0 und H0 als Ganzes in sich überführt.
Eigenschaften der Abbildung κ:
1. Definitions- und Wertebereich von κ sind jeweils Inneres oder Äußeres eines Kreises im weiteren
Sinne oder E0 oder leer.
Beweis: X ∈ Def(κ) bedeutet: Es existiert ein Y y im Wertebereich mit Y = πϕπ −1 (X), also
X = πϕ−1 π −1 (Y ). Es liegt π −1 (Y ) in F0 , und es muss ϕ−1 π −1 (Y ) in H0 ∩ F0 liegen. Nach obiger
Folgerung ist Def(κ) Ineres oder Äußeres eines Kreises i.w.S.
2. Ist ϕ eine involutorische Kongruenztransformation, so ist stimmen Definitions- und Wertebereich
von κ überein.
3. κ ist kreistreu, genauer: Die Bildmenge einer Kreislinie i.w.S. mit dem Definitionsbereich ist der
Durchschnitt einer Kreislinie i.w.S. mit dem Wertebereich von κ.
Beweis: Dies folgt aus obigem Hilfssatz und der Invarianz der Komplkanarität einer Punktmenge
bei Kongruenztransformation.
4. κ ist winkeltreu, d.h., der Schnittwinkel zweier Kreislinien i.w.Sinne hat in Original und Bild dieselbe
Größe.
Beweis: Es seien k1 , k2 zwei sich im Punkt S schneidende Kreislinien, t1 , t2 die Tangenten an die
Kreislinien in S. Dann folgt für i = 1, 2: Zu ki gibt es eine Ebene Ei , deren Fernpunkte in F0 genau
π −1 (ki ) sind. Zu ti gibt es eine Ebene Eit mit ti ⊂ Eit und Eit ⊥ E0 , die Fernpunkte von Eit in
F0 sind genau π −1 (ti ). Der Schnittwinkel der Kreilinien ist gleich dem Schnitwinkel der Ebenen
E1t , E2t . Betrachtet man eine Grenzkugel zum Ende π −1 (S), so schneiden die vier Ebenen E −
1, E2 , E1t , E2t dort vier Grenzkreise aus. Dabei sind die von E1 und E1t ausgeschnittenen Grenzkeise
3.5
Ein Blick auf kreistreue Abbildungen in der hyperbolischen Ebene
57
im Sinne der auf der Grenzkugel geltenden euklidischen Geometrie parallel“, ebenso die von E2
”
und E2t ausgeschnittenen. In dem von den vier Grenzkreisen gebildeten Parallelogramm“ sind
”
jeweils Innenwinkel und Scheitelwinkel des gegenüberliegenden Innenwinkels kongruent. Also ist
t
t
der Schnittwinkel der Ebenen E1 , E2 gleich dem Schnittwinkel von E1 , E2 , aber dieser ändert sich
nicht bei Kongruenztransformation, und daraus folgt die Behauptung.
5. Existenz- und Einzigkeitssatz: Sind A, B, C drei paarweise verschiedene Punkte in E0 derart, dass
das Dreieck ABC keine nichttrivialen Symmetrien aufweist, ebenso A0 , B 0 , C 0 , so existieren genau
zwei Kreisverwandtschaften, die A in A0 , B in B 0 und C in C 0 überführen.
Beweis: Die Punkte π −1 (A), π −1 (B), π −1 (C) können durch drei Geraden verbunden werden, diese
sind komplanar in einer Ebene E; das Analoge gilt für A0 , B 0 , C 0 , Ebene E 0 . Es gibt genau zwei
räumliche Kongruenztransformationen, die E smt dem asymptotischen Dreieck in E 0 samt asymptotischem Dreieck überführt (beide unterscheiden sich durch die Ebenenspiegelung an E 0 ).
Zwei Beispiele:
Beispiel 1:
In der Bezeichnung aus Eigenschaft 5. sei A = A0 , B =
B 0 , C = C 0 . Die Ebene des zugehörigen asymptotischen
Dreiecks sei E. Ist ϕ die identische Abbildung, so ist auch
κ die identische Abbildung. Sei nun ϕ die Spiegelung an der
Ebene E, und es mögen E und E0 das gemeinsame Lot l
haben, κ := π ◦ σE ◦ π −1 . κ ist involutorisch. Das Bild von
E ∩ F0 bei π ist ein Kreis k, der l ∩ E0 als Mittelpunkt hat.
k bleibt bei κ punktweise fest. Das Bild von σe (E0 ) ∩ F0
bei κ ist ein mit k konzentrischer, innerhalb k liegender
Kreis. Definitions- und Wertebereich von k ist die Ebene
E0 ohne die Punkte der Kreisfläche des inneren Kreises. Die
innerhalb von k liegenden Punkte des Definitionsbereiches
werden auf Punkte außerhalb k abgebildet und umgekehrt.
l
σE (E0 )
E
E0
Beispiel 2:
Es sei ϕ die Spiegelung an einer Ebene E1 die E0 in einer Geraden s schneidet, der Schnittwinkel sei
In einer Ebene, die s senkrecht schneidet, zeigt sich das
nebenstehende Bild.
Man erkennt, dass es sich hier genau um die zu Beginn
dieses Abschnittes angegebene Abbildung
handelt, die mit
der Abbildung x 7→ x∗ := ∆ π2 − Π(x) verknüpft ist. Diese Abbildung ist demnach eine Kreisverwandtschaft. Man
sieht weiterhin, dass bei dieser Abbildung Geraden, die mit
s ein gemeinsames Lot l haben, auf Halbkreise mit Mittelpunkt l ∩ s abgebildet werden. Geraden, die zu s parallel
sind, werden auf Grenzkreise (zu einem Ende von s hin)
abgebildet, und aus Halbgeraden mit Anfangspunkt auf s
werden Abstandslinien.
π
.
4
X
x
π
4
κ(X)
x
∗
x
58
3
3.6
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Koordinatengeometrie in der hyperbolischen Ebene
3.6.1
Weierstraßsche Koordinaten
Zwei zueinander senkrechte Geraden a1 , a2 werden als Koordinatenachsen ausgezeichnet; ihr Schnittpunkt O sei der Koordinatenursprung.
Durch einen beliebigen Punkt P werden die Lote zu den Achsen
betrachtet, die Lotfußpunkte seien F1 , F2 . Es ergeben sich drei
Zahlen
x := |P F2 |,
y := |P F1 |,
r := |OP |.
Es ist nun zweckmäßig, nicht die Zahlen X, y als Koordinaten zu
verwenden, sondern ihre hyperbolischen Sinus und außerdem den
hyperbolischen Kosinus von r hinzuzunehmen. Nur dann kann erwartet werden, dass Geraden durch lineare Gleichungen beschrieben werden, wie die Formeln für rechtwinklige Dreiecke zeigen.
Man definiert:
ξ := ± sinh x,
η := ± sinh y,
a2
F2
x
P
r
y
ϕ
O
a1
F1
% := cosh r
Das Vorzeichen wird in üblicher Weise entsprechend den von a1 , a2 erzeugten vier Quadranten festgelegt.
Die Zuordnung P −→ (ξ, η, %) heißt Weierstraßsches Koordinatensystem.
Die dritte Koordinate % ist durch ξ und η bereits bestimmt. Im rechtwinkligen Dreieck OP F1 gilt
sin ϕ sinh r = sinh y, und im Dreieck OP F2 gilt sin( π2 − ϕ) · sinh r = sinh y bzw. cos ϕ sinh r = sinh x.
Durch Quadrieren und Addieren ergibt sich sinh2 r = sinh2 y + sinh2 x, also %2 − 1 = ξ 2 + η 2 , d.h. es gilt
stets
%2 − ξ 2 − η 2 = 1
Es besteht also eine Bijektion zwischen der hyperbolischen Ebene und den Zahlentripeln (ξ, η, %) mit
%2 − ξ 2 − η 2 = 1 und % ≥ 1. Dies kann geometrisch als Abbildung der hyperbolischen Ebene auf eine
Schale eines zweischaligen Hyperboloids im dreidimensionalen euklidischen Raum gedeutet werden.
3.6.2
Abstandsberechnung und Kongruenztransformationen
Es seien P1 , P2 zwei Punkte. Koordinaten: Pi ↔ (ξi , ηi , %i ) (i =
1, 2). Es sei d der Abstand |P1 P2 |. Dann gilt nach dem Seitenkosinussatz Im Dreieck OP1 P2
cosh d
cosh d
= cosh r1 cosh r2 − sinh r1 sinh r2 cos(ϕ2 − ϕ1 )
= %1 %2 − sinh r1 sinh r2 cos ϕ2 cos ϕ1 −
− sinh r1 sinh r2 sin ϕ2 sin ϕ1
a2
x2 P2
r2 y 2
ϕ2
x1
ϕ1
P1
y1
Durch
a1
Ferner ist für i = 1, 2
sin ϕi sinh ri = sinh yi
cos ϕi sinh ri = sinh xi
Einsetzten ergibt sich cosh d = %1 %2 − sinh x1 sinh x2 − sinh y1 sinh y2 . Also gilt die Abstandsformel
cosh |P1 P2 | = %1 %2 − ξ1 ξ2 − η1 η2
Kongruenztransformationen
Zunächst drei Beispiele:
1.) Drehung um O um den Drehwinkel ϕ
3.6
Koordinatengeometrie in der hyperbolischen Ebene
59
x0
P0
Es ist
ξ
η
=
=
sinh x = sinh r cos ϕ0
sinh y = sinh r sin ϕ0
r
Hieraus folgt
0
ξ
η0
ϕ
= sinh r cos(ϕ0 + ϕ) = sinh r cos ϕ0 cos ϕ − sinh r sin ϕ0 sin ϕ
= sinh r sin(ϕ0 + ϕ) = sinh r sin ϕ0 cos ϕ + sinh r cos ϕ0 sin ϕ
y0
x
P
r
ϕ0
y
Demnach gilt für die Drehung die Transformationsformel
ξ0
η0
= ξ cos ϕ − η sin ϕ
= ξ sin ϕ + η cos ϕ
2.) Verschiebung längs der ersten Korrdinatenachse um die Länge a
Nach einer Formel für dreirechtwinklige Vierecke gilt:
sinh x = cosh y sinh a0
sinh x0 = cosh y sinh(a0 + a) =
= cosh y sinh a0 cosh a + cosh y sinh a cosh a0 ,
und nach einer Formel für rechtwinklige Dreiecke:
cosh r
cosh r0
=
=
P
x
r
cosh y cosh a0
cosh y cosh(a0 + a) =
= cosh y cosh a0 cosh a + cosh y sinh a0 sinh a
P0
x0
r0
a0
y = y0
a
Aus beidem folgt
sinh x0
cosh r0
= sinh x cosh a + cosh r sinh a
= cosh r cosh a + sinh x sinh a
Demnach gilt für die Verschiebung längs der ersten Achse die Transformationsformel
ξ0
%0
= ξ cosh a + % sinh a
= ξ sinh a + % cosh a
3.) Grenzdrehung zum Ende der ersten Koordinatenachse um das Bogenstück a
Hier ist es zweckmäßig, einen beliebigen Punkt P statt durch die
Koordinaten ξ, η, % durch zwei andere Parameter u, v zu beschreiben. Es seien F, G die Lotfußpunkte von P auf die Koordinatenachsen, und es mögen die drei Grenzkreise durch O, P und F zum
(positiven) Ende der ersten Achse betrachtet werden. Der Grenzkreis durch P schneide die erste Achse in U . Es ist bzw. wird
gesetzt:
x = |GP |,
, y = |F P |,
u := |OU |,
_
v :=OV ,
f := |OF |
V
P
G
r
O
y
U F
Nun werden u, v durch ξ, η, % ausgedrückt. Auf Grund der Sätze über Strecken an Grenzkreisbögen bzw.
koaxiale Grenzkreisbögen gilt
_
v = eu · P U = eu sinh y
60
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
und
ef −u = cosh y bzw. ef = cosh y · eu
Es folgt
η = v · e−u
(1)
Weiter folgt auf Grund einer Formel für dreirechtwinklige Vierecke
ξ
sinh |P G| = cosh y sinh f =
=
=
1
1
ef − e−f
cosh y =
cosh yeu −
cosh y =
u
2
2
cosh ye
2
2
1
1
u
u
u
−u
=
2 (cosh ye − e ) = 2 (1 + sinh y)e − e
=
1 u
2 (e
=
− e−u + 12 v 2 e−u
also ist
1
ξ = sinh u + v 2 e−u
2
Ferner ist nach einer Formel für rechtwinklige Dreiecke
%
=
=
=
=
=
=
=
cosh r = cosh f cosh y =
1
2
cosh yeu +
2
1
2 (cosh
1
2
1
cosh y·eu
ef +e−f
2
(2)
cosh y =
cosh y =
yeu + e−u ) cosh y =
(1 + sinh2 y)eu + e−u
also
1
% = cosh u + v 2 e−u
2
Aus (1), (2) und (3) folgt unter Benutzung der Definition von sinh und cosh:
%+ξ
%−ξ
(3)
= eu + v 2 e−u
= e−u
Die Grenzdrehung um das positive Ende der ersten Achse um das Bogenstück der Länage a auf demjenigen Grenzkreis zu diesem Ende, der durch den Ursprung geht, bedeutet den Übergang vom Punkt mit
den Parameterwerten (u, v) zum Punkt mit den Paramterwerten (u0 , v 0 ) = (u, v + a). Dem entspricht
ein Übergang vom Koordinatentripel (ξ, η, %) zum Tripel (ξ 0 , η 0 , %0 ). Die letzteren Werte werden jetzt
berechnet:
ξ0
1
sinh u + (v + a)2 e−u =
2
1
1
= sinh u + v 2 e−u + ave−u + a2 e−u ,
2
2
=
also
ξ 0 = (1 −
a2
a2
)ξ + aη + %,
2
2
ferner
η0
also
= (v + a)e−u =
= η + a(% − ξ),
3.6
Koordinatengeometrie in der hyperbolischen Ebene
61
η 0 = −aξ + η + a%
und schließlich
%0
=
1
1
cosh u + (v + a)2 e−u = % + ave−u + a2 e−u =
2
2
1
% + aη + a2 (−ξ + %),
2
also
%0 = −
a2
a2
ξ + aη + (1 + )%.
2
2
In allen drei Beispielen hat sich ergeben, dass die Abbildung in den Weierstraßschen Koordinaten eine
lineare Abbildung ist:
0
ξ
ξ
η0 = A · η ,
%0
%
dabei ist
− sin ϕ
cos ϕ
0
cos ϕ
A = sin ϕ
0
0
0
1
cosh a 0 sinh a
0
1
0
A =
sinh a 0 cosh a
für eine Drehung um O um den Drehwinkel ϕ,
1
0
0
A = 0 cosh a sinh a
0 sinh a cosh a
für eine Verschiebung längs der ersten Achse um die Länge a,
2
1 − a2
−a
A =
2
− a2
a2
a
2
1
a
a2
a 1+ 2
für eine Verschiebung längs der zweiten Achse um die Länge a,
für eine Grenzdrehung um ein Ende der ersten Achse um den Bogen a.
Jede gleichsinnige Kongruenztransformationen ist aus diesen vier Typen zusammensetzbar, ist also im→
−
→
mer in der Form x0 = A · −
x darstellbar. Die hierbei und auch bei den ungleichsinnigen Kongruenztransformationen entstehenden Matrizen können allgemein charakterisiert werden. Schreibt man die die
Weierstraßschen Koordinaten zweier Punkte P1 , P2 als dreizeilige einspaltige Matrizen, wi = (ξi , ηi , %i )T
(i = 1, 2), so kann der hyperbolische Kosinus ihres Abstandes als Matrizenprodukt geschrieben werden:
−1 0 0
cosh |P1 P2 | = w1T · M0 · w2 mit M0 = 0 −1 0 .
0
0 1
Bei der Abbildung w0 = Aw liegt genau dann eine Kongruenztransformation vor, wenn sich der Abstand
nicht ändert, d.h., für beliebige w1 , w2 muss gelten
w10T M0 w20 = w1T M0 w2 ,
also
(Aw1 )T M0 Aw2 = w1T M0 w2
bzw.
w1T AT M0 Aw2 = w1T m0 w2 .
Dies gilt für alle w1 , w2 genau dann wenn die Matrixgleichung
AT · M0 · A = M0
gilt. Dies ist eine notwendige und hinreichende Bedingung dafür, dass duchr w0 = Aw eine Kongruenztransformation beschrieben wird.
62
3.6.3
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Darstellung von Geraden in Koordinaten
Es sei g eine beliebige Gerade und F der Lotfußpunkt von O auf g. Die Gerade kann dann durch zwei
Parameter gekennzeichnet werden: durch die Länge a := |OF | und den Winkel ϕ, den die Halbgerade
OF + (falls O = F ist, kann eine Halbgerade OL+ mit L auf dem Lot zu g duchr O genommen werden)
mit der positiven Halbgeraden der ersten Achse bildet.
Man kann g aus der zweiten Koordinatenachse erzeugen, indem man diese um a längs der ersten Achse
verschiebt und dann um O um den Winkel ßf f i dreht. Diezweite
Achse istdurch
die Gleichung x = 0
ξ
ξ0
bzw. ξ = 0 charakterisiert. Bei Anwendung der Beziehung η = A−1 · η 0 ergibt sich hieraus,
%
%0
wenn man für A die für eine Verschiebung zuständige Abbildungsmatrix nimmt (zur Bildung von A−1
ist legiglich a durch −a zu ersetzen), die Gleichung
cosh aξ 0 − sinh a%0 = 0
und hieraus nach Anwendung einer Drehung (und Weglassen der Striche) die allgemeine Geradengleichung
(cosh a cos ϕ) · ξ + (cosh a sin ϕ) · η − sinh a · % = 0.
Die Gleichung hat die Form
P ξ + Qη − R% = 0
mit
P 2 + Q2 − R2 = 1,
Q
P
dabei ist R der hypebolische Sinus des Abstandes der Geraden vom Koordinatenursprung, √1+R
, √1+R
2
2
sint Kosinus und Sinus des Winkels erste Korrdinatenachse und Lot durch O zur Geraden.
Beispiel: Für Gerade, die zu den positiven Enden der Koordinatenachsen parallel ist, ist der Abstand von
O gleich ∆( π4 ), und der genannte Winkel ist π4 , folglich hat die Gerae die Gleichung ξ + η + % = 0.
3.6.4
Darstellung von Kreisen in Koordinaten
1.) Eigentlicher Kreis
Auf Grund der Abstandsformel in 3.6.2 ergibt sich, dass ein Kreis, dessen Mittelpunkt die Koordinaten
(P, Q, R) hat und für den der cosh seines Radius den Wert C hat, durch die Gleichung
−P ξ − Qη + R% = C
mit
P 2 + Q2 − R2 = −1,
C>1
hat.
2.) Abstandslinie
Sei zunächst speziell die erste Koordinatenachse die Basisgerade, und der Abstand sei d. Diese spezielle
Abstandslinie entsteht aus dem Punkt mit den Koordinaten (0, sinh d cosh d) durch Anwendung der Verschiebungen längs der ersten Achse um die Länge t, wobei t die reellen Zahlen durchläuft. Hieraus ergibt
sich die Parameterdarstellung der Abstandslinie in der Form
ξ
η
%
=
=
=
sinh t cosh d
sinh d
cosh t cosh d
t∈R
bzw. in paramterfreier Form:
η = sinh d
Die allgemeine Form der Gleichung einer Abstandslinie ergibt sich hieraus durch Anwendung von Verschiebung längs der zweiten Achse und Drehung um O. Die Formeln aus 3.6.2 liefern nach der Verschiebung
cosh a · η − sinh a · % = sinh d
und nach der Drehung
cosh a(ξ sin ϕ + η cos ϕ) − sinh a · % = sinh d
bzw.
3.7
Das Konformmodell der hyperbolischen Ebene
63
cosh a sin ϕ ξ + cosh a cos ϕ η − sinh a % = sinh d
Die Gleichung hat die Form
P ξ + Qη + R% = C
mit
P 2 + Q2 − R2 = 1
3.) Grenzkreis
Sei zunächst speziell der Grenzkreis durch den Koordinatenursprung betrachtet, der zum positiven Ende
der ersten Koordinatenachse gehört. Er enststeht aus dem Ursprung (0, 0, 1) durch Anwndnung aller
Grenzdrehungen um dieses Ende, so dass isch die Parameterdarstellung
ξ
η
t2
2
= t
=
t∈R
2
% =
t
2
1+
ergibt. Eine zugehörige parameterfreie Gleichung lautet dann
%−ξ =1
Die allgemeine Form der Gleichung eines Grenzkreises ergibt sich hieraus durch Anwendung von Verschiebung und Drehung. Verschiebung längs der ersten Achse führt auf
(cosh a + sinh a)(% − ξ) = 1,
Drehung ergibt
ea (% − ξ cos ϕ + η sin ϕ) = 1
bzw.
− cos ϕ · ξ + sin ϕ · η + % = e−a
Die Gleichung hat die Form
P ξ + Qη + R% = C
mit
P 2 + Q2 − R2 = 0
Insgesamt haben Gerade, eigentlicher Kreis, Abstandslinie und Grenzkreis lineare Gleichungen in den
Weierstraßschen Koordinaten:
P ξ + Qη + R% = C,
dabei ist
−1
0
P 2 + Q2 − R2 =
1
1
3.7
für einen eigentlichen Kreis
für eine Grenzkreis
für eine Abstandslinie
und C = 0 für eine Gerade
Das Konformmodell der hyperbolischen Ebene
Die Inversion am Kreis
In der euklidischen Ebene sei ein Kreis k0 fest vorgegeben, er habe den Mittelpunkt O und den Radius r.
Die Inversion am Kreis k0 (auch: Spiegelung an k0 ) ist die folgendermaßen definierte Abbildung:
64
3
HYPERBOLISCHE NICHTEUKLIDISCHE GEOMETRIE
Für einen beliebigen Punkt P 6= O ist der Bildpunkt P 0 festgelegt
durch:
(1) P 0 liegt auf der Halbgeraden OP + und
(2) es ist |OP | · |OP 0 | = r2 .
Erweitert man die euklidische Ebene um einen einzigen Punkt
∞ (“inversionsgeometrische Ebene“) und definiert diesen als Bild
von O sowie O als Bild von ∞, so wird die Inversion an k0 eine bijektive Abbildung. Die Inversion ist involutorisch. k0 bleibt
O
punktweise fest. Das Innere und das Äußere von k0 werden ausgetauscht. Das Bild eines Punktes P außerhalb k0 kann man dadurch
gewinnen, dass man durch P die Tangenten an k0 legt und die Verbindungsgerade der Berührungspunkte T1 , T2 mit OP schneidet,
denn das Dreieck OTi P ist zum Dreieck OP T ähnlich, und aus
der Verhältnisgleichheit entsprechender Seiten folgt die Bedingung
|OP | · |OP 0 | = r2 .
Mit Hilfe des Sekanten-Tangenten-Satzes bzw. des Sehnensatzes beweist man
T1
P0
P
T2
ganz elementar:
• Das Bild einer Geraden durch O ist ein Kreis durch O, der in O eine zur Geraden parallele Tangente
hat, und umgekehrt ist das Bild eines Kreises durch O eine zur Tangente an den Kreis in O parallele
Gerade.
• Das Bild eines O nicht enthaltenden Kreises ist wieder ein Kreis (der O nicht enthält).
Als Folgerung ergibt sich:
Die Inversion am Kreis ist winkeltreu, d.h., Schnittwinkel zwischen zwei Geraden oder Geraden und
Kreisen oder zwei Kreisen ändern ihre Größe nicht.
Denn Schnittwinkel zwischen Kreisen werden als die Schnittwinkel zwischen den Tangenten in den Schnittpunkten definiert, und aus zwei Geraden werden bei Inversion zwei Kreise durch O, die dort zu den
Geraden parallele Tangenten, also dieselbe Schnittwinkelgröße haben.
Führt man zwei Inversionen an verschiedenen Kreisen hintereinander aus, erhält man wieder eine Abbildung, die Kreise und Geraden in Kreise und Geraden überführt, die außerdem winkeltreu ist. Im
Spezialfall zweier konzentrischer Kreise ergibt sich bei der Zusammensetzung der Inversionen an ihnen
eine zentrische Streckung. Es ist daher zweckmäßig, alle Inversionen und alle Ähnlichkeitstransformationen zusammenzufassen und festzusetzen, dass die Ähnlichkeitsabbildungen den Punkt ∞ auf sich selbst
abbilden. Man erhält dann eine Gruppe von Abbildungen der inversionsgeometrischen Ebene, die Gruppe der Kreisverwandtschaften. Die Relation zwischen Figuren, durch Kreisverwandtschaft ineinander
überführbar zu sein, ist dann eine Äquivalenzrelation. In diesem Sinne ist z.B. die Menge aller Geraden
durch einen festen Punkt (Geradenbüschel) mit der Menge aller Kreise durch zwei feste Punkte äquivalent, ebenso eine Menge zueinander paralleler Geraden zu einer Menge sich in einem Punkte berührender
Kreise. Hier zwei Beispiele zueinander äquivalenter Figuren:
Es werde jetzt ein Kreis k0 ausgezeichnet und die Menge derjenigen Kreisverwandtschaften betrachtet,
bei denen k0 und sein Inneres in sich selbst übergehen. Offensichtlich bildet diese Menge eine Gruppe H.
Diese Gruppe enthält z.B. die Drehungen um den Mittelpunkt von k0 sowie die Geradenspiegelungen an
Geraden durch den Mittelpunkt von k0 . Die Gruppe ist so reichhaltig, dass man jeden Punkt innerhalb
k0 auf jeden anderen Punkt innerhalb k0 abbilden kann. Zum Beweis genügt es zu zeigen, dass der
Mittelpunkt M von k0 auf jeden anderen Punkt P in k0 abgebildet werden kann. Spiegelt man k0 an
einem Kreis k1 mit einem der beiden Punkte k0 ∩ g(M P ) als Mittelpunkt, so geht g(M P ) in sich und
k0 in eine zu g(M P ) senkrechte Gerade über. Mit dem Schnittpunkt dieser Geraden als Zentrum einer
3.7
Das Konformmodell der hyperbolischen Ebene
65
Streckung kann man das Bild von M in das Bild von P überführen, und nach anschließender abermaliger
Inversion an k1 hat man insgesamt eine Kreisverwandtschaft aus H bekommen, die M in P überführt.
Man kann überlegen, dass es nach Festlegung je einer von M und von P ausgehenden Richtung genau
zwei Abbildungen in H gibt, die auch die Richtung in M in diejenige in P überführt.
Eine besondere Rolle spielen bei den Kreisverwandtschaften der Gruppe H diejenigen Kreise, die k0
senkrecht schneiden, sie zusammen mit den Geraden durch den Mittelpunkt von k0 mögen hier kurz
Orthokreise genannt werden. Sie haben folgende Eigenschaften:
(1) Das Bild eines Orthokreises bei einer Kreisverwandtschaft aus H ist wieder ein Orthokreis.
(2) Die Inversionen an den Orthokreisen gehören zur Gruppe H.
(3) Ein Kreis ist genau dann Orthokreis, wenn er zwei Punkte enthält, die Original und Bild bei der
Inversion an k0 sind.
(4) Zu zwei verschiedenen Punkten innerhalb von k0 gibt es genau einen Orthokreis, der diese beiden
Punkte enthält.
Die Eigenschaften (1) und (2) folgen aus der Winkeltreue der Kreisverwandtschaften. – Eigenschaft (3)
ergibt sich so: Legt man durch zwei Punkte P, P 0 , die bei der Inversion an k0 miteinander vertauscht
werden, einen Kreis k, so muss dieser k0 in einem Punkt K schneiden. Bei der Inversion an k0 geht also
die Menge {P, P 0 , K} und damit der Kreis k in sich selbst über, und das bedeutet wegen er Winkeltreue
der Inversion, dass k ein Orthokreis ist. Umgekehrt geht jeder Orthokreis bei Inversion an k0 in sich selbst
über, er enthält also Punktepaare, die Original und Bild voneinander sind. – Die Eigenschaft (4) ergibt
sich mittels (3) so: Sind P, Q Punkt innerhalb k0 , so gibt es genau einen Kreis durch P, Q und das Bild
von P bei Inversion an k0 , dieser ist Orthokreis und enthält auch das Bild von Q bei Inversion an k0 ;
und jeder Orthokreis durch P und Q muss auch deren Spiegelbilder bei Inversion an k0 enthalten.
Die Eigenschaft (4) ist eine zum Verbindbarkeitsaxiom aus der
k0
Axiomgruppe zur Inzidenz analoge Aussage: Die Punkte im Inneren von k0 als Punktmenge und die im Inneren von k0 verlaufenden
P
b
Bögen der Orthokreise als Geraden erfüllen die Inzidenzaxiome
der absoluten Geometrie der Ebene (vgl 3.1.1). Im Hinblick auf
das Parallelenaxiom ist sofort zu sehen, dass hier das hyperbolische Parallelenaxiom gilt: Zu einem Orthokreisbogen b im Inneren
von k0 und einem Punkt P innerhalb k0 , der nicht auf diesem Bogen liegt, gibt es unendlich viele Orthokreisbögen innerhalb k0 ,
die b nicht schneiden.
Die Punkte im Inneren von k0 und die im Inneren von k0 verlaufenden Orthokreisbögen bilden also ein
Modell für die Inzidenzgeometrie der hyperbolischen Ebene. Das Modell enthält aber auch eine Darstellung der Kongruenztransformationen der hyperbolischen Ebene: Die Transformationen der Gruppe H,
eingeschränkt auf das Innere von k0 , haben die Eigenschaften der Bewegungen der hyperbolischen Ebene.
Man kann insbesondere die einzelnen Typen (Drehung, Grenzdrehung, Verschiebung) an diesem Modell
im einzelnen verfolgen.
Dieses Modell der hyperbolischen Ebene bildet zwar die hyperbolischen Geraden im allgemeinen als
euklidische Kreise ab und ist natürlich – da in einem endlichen Gebiet liegend – nicht abstandstreu, aber
es bildet die Winkel in originaler Größe ab. Es wird daher als Konformmodell der hyperbolischen Ebene
bezeichnet.
66
INHALTSVERZEICHNIS
Inhaltsverzeichnis
1 Einführung
1.1 Historisches über euklidische und nichteuklidische Geometrie . . . . . . . . . . . . . . . .
1.2 Zugänge zur Elementargeometrie – kurze Wegbeschreibungen und etwas Axiomatik . . . .
1.3 Der projektive Abschluß einer affinen Ebene . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
2
4
2 Sphärisch-elliptische Geometrie
2.1 Von der projektiven Ebene zur elliptischen Ebene und zur zweidimensionalen sphärischen
Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Sphärische Trigonometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Größen zur Erfassung sphärischer Dreiecke . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Polarität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Fundamentalformeln der sphärischen Trigonometrie . . . . . . . . . . . . . . . . .
2.2.4 Formeln für rechtwinklige sphärische Dreiecke . . . . . . . . . . . . . . . . . . . . .
2.2.5 Das Pentagramma mirificum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.6 Winkelsumme und Flächeninhalt . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
3 Hyperbolische nichteuklidische Geometrie
3.1 Absolute Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Absolute Geometrie der Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Absolute Geometrie des dreidimensionalen Raumes . . . . . . . . . . . . . . . . . .
3.2 Hyperbolische Geometrie der Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Das hyperbolische Parallelenaxiom, der Begriff der hyperbolischen nichteuklidischen Parallelen, Parallelwinkel und Paralleldistanz . . . . . . . . . . . . . . . . . .
3.2.2 Eigenschaften der Parallelität, Lage zweier Geraden zueinander . . . . . . . . . . .
3.2.3 Geradenbüschel, Kreise, Grenzkreise, Abstandslinien . . . . . . . . . . . . . . . . .
3.2.4 Kongruenztransformationen in der hyperbolischen Ebene . . . . . . . . . . . . . .
3.2.5 Hyperbolisches Pentagramma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.6 Zerlegungsgleiche Polygone in der hyperbolischen Ebene, Dreiecksinhalt und Defekt
3.3 Hyperbolische Geometrie in drei Dimensionen . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Parallelität im Raum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Kugeln im weiteren Sinne und eine räumliche Herleitung der Pentagramma-Kette .
3.4 Hyperbolische Trigonometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Die Parallelwinkelfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.2 Trigonometrie am rechtwinkligen Dreieck . . . . . . . . . . . . . . . . . . . . . . .
3.4.3 Fünfrechtwinklige Fünfecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.4 Trigonometrie für beliebige Dreiecke . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 Ein Blick auf kreistreue Abbildungen in der hyperbolischen Ebene . . . . . . . . . . . . .
3.6 Koordinatengeometrie in der hyperbolischen Ebene . . . . . . . . . . . . . . . . . . . . . .
3.6.1 Weierstraßsche Koordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6.2 Abstandsberechnung und Kongruenztransformationen . . . . . . . . . . . . . . . .
3.6.3 Darstellung von Geraden in Koordinaten . . . . . . . . . . . . . . . . . . . . . . .
3.6.4 Darstellung von Kreisen in Koordinaten . . . . . . . . . . . . . . . . . . . . . . . .
3.7 Das Konformmodell der hyperbolischen Ebene . . . . . . . . . . . . . . . . . . . . . . . .
6
10
10
11
12
13
13
15
16
17
17
19
20
20
22
27
31
32
35
38
38
40
42
42
47
49
52
54
58
58
58
62
62
63