Staub im Käfig - Das Modell einer Paulfalle
Werbung

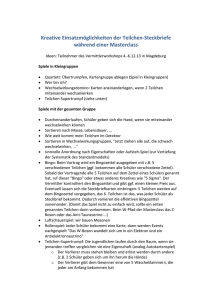
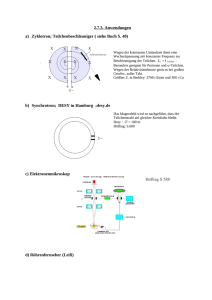
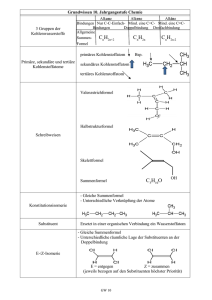
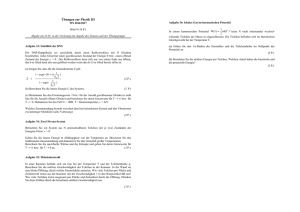
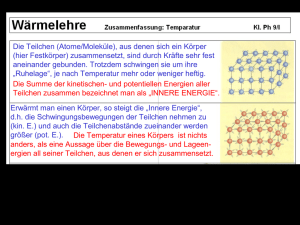
Staub im Käfig - Das Modell einer Paulfalle Bernhard Dörling und Peter Fritz 11. Januar 2003 Inhaltsverzeichnis 1 Einführung 1.1 Was ist eine Paulfalle ? . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Unser Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 2 2 Aufbau der Falle 2.1 aktueller Aufbau . . . . . . . . . . . . . . . 2.1.1 Elektroden . . . . . . . . . . . . . . 2.1.2 Netzgerät und Trafo . . . . . . . . . 2.1.3 Beleuchtungsapparatur und Kamera 2.1.4 Windschutz . . . . . . . . . . . . . . 2.1.5 Bärlappsporen . . . . . . . . . . . . 2.2 Entwicklung der Falle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2 3 4 4 4 4 4 3 Bestimmung der Konstanten 3.1 Ladungs-Masse Verhältnis . . . . . . 3.2 Masse . . . . . . . . . . . . . . . . . 3.2.1 Bestimmung durch Wiegen . 3.2.2 Bestimmung per Fallversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 6 6 6 4 Theorie 4.1 Gleichung des Potentials . . . . . . . . 4.2 Bewegungsgleichungen . . . . . . . . . 4.3 Teilung in Mikro- und Makrobewegung 4.3.1 Mikrobewegung . . . . . . . . . 4.3.2 Makrobewegung . . . . . . . . 4.4 Reibung . . . . . . . . . . . . . . . . . 4.5 Gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7 9 10 11 11 13 14 5 Simulationen 14 6 Fehlereinschätzung 15 7 Schlusswort 15 8 Quellen 15 9 Anlagen 15 1 1 Einführung In dem Projekt Paulfalle bauten wir ein Modell einer Paulfalle mit möglichst einfachen Mitteln. Das heißt, wir benützten nur Mittel, die in der Schulsammlung oder im Baumarkt zu finden waren. Außerdem entwickelten wir ein theoretisches Modell, um die Bewegung der Teilchen möglichst exakt zu beschreiben. Mithilfe dieses Modells erstellten wir eine Computer-Simulation der Bewegung, die durch ihre Übereinstimmung mit der Wirklichkeit die Bestätigung der Theorie lieferte. 1.1 Was ist eine Paulfalle ? Die Paulfalle ist ein Instrument der modernen Physik, mit der mittels eines wechselnden elektrischen Feldes die freischwebende, räumliche Stabilisierung elektrischer Ladungsträger ermöglicht wird. Sie ist benannt nach ihrem Erfinder, Wolfgang Paul, der dafür 1989 den Nobelpreis für Physik erhielt. Durch Einsatz eines Hochvakuums können mit diesen Fallen einzelne Moleküle oder Ionen gefangen werden. 1973 gelang es an der Universität von Washington, einzelne Elektronen einzufangen, und zwölf Jahre später, diese über einen Zeitraum von über 10 Monaten zu isolieren. Benützt werden diese Fallen u.a zum Beobachten und Messen des Verhaltens einzelner Teilchen, insbesondere um Quantenmechanische Vorhersagen zu testen. Da die dreidimensionale Stabilisierung elektrisch geladener Teilchen mit einem statischen, elektrischen Feld nicht möglich ist, wird in der Paulfalle ein wechselndes elektrisches Feld benutzt. Es gibt ausgehend von diesem Prinzip unterschiedliche Bauformen, z.B. lineare oder rotationssymmetrische Fallen. Beim Fangen von einzelnen Ionen ist eine sehr hohe Spannung und sehr hohe Frequenzen nötig. Deshalb, und aufgrund des benötigten Vakuums, ist es nicht möglich, eine solche Falle in der Schule zu realisieren. 1.2 Unser Modell Bei unserem Modell einer rotationssymmetrischen Falle wird das gleiche Prinzip verwendet. Anstatt einzelne Ionen oder Moleküle zu fangen, beschränken wir uns auf staubgroße Teilchen, Bärlappsporen. Dadurch sinkt die benötigte Spannung auf ca. 8000 Volt und die Verwendung der üblichen Netzfrequenz von 50 Hertz wird möglich. Außerdem ist nun kein Vakuum mehr nötig, die Teilchen lassen sich problemlos in Luft fangen. Die zum Bau des Modells, das im weiteren Verlauf des Textes als Paulfalle bezeichnet wird, verwendeten Komponenten sind zudem alle in einer Schulsammlung zu finden, bzw. billig im Baumarkt zu bekommen. Ein Video von in der Falle gefangenen Teilchen befindet sich auf der beigefügten CD. 2 Aufbau der Falle Die Idee für unsere Falle haben wir aus einem Video der Universität Mainz, welches ein mit simplen Mitteln realisiertes Modell einer Paulfalle zeigt. Unser erster Versuch, eine Paulfalle zu bauen orientierte sich grob an diesem Video. Da sich der dort gezeigte Aufbau jedoch als verbesserungsbedürftig erwies veränderten wir die Falle solange, bis sie schließlich so aussah, wie sie im Folgenden beschrieben wird. 2.1 aktueller Aufbau Unsere Falle hat eine Grundfläche von circa 20 x 20 Zentimetern und ist 30 Zentimeter hoch. Die Basis der Falle bildet ein kleines Stativ, an dem die 3 Elektroden, zwischen denen die Teilchen gefangen werden, befestigt sind. Die zum Fangen der Teilchen benötigte hohe Wechselspannung wird von einem Transformator erzeugt, der primärseitig von einem Netzgerät gespeist wird. Damit durch die hohe Spannung niemand zu Schaden kommt wird der Stromkreis mit einem Schutzwiderstand abgesichert. Die gesamte Apparatur wird von einer Lampe beleuchtet, um die kleinen, gefangenen Teilchen 2 Abbildung 1: gesamter Aufbaus auch gut sichtbar zu machen. Um die gefangenen Teilchen noch besser sehen zu können benützen wir ausserdem eine ”Schwanenhalskamera“ und einen Bildschirm. Die gesamte Apparatur wird von einer Plexiglashaube überdeckt, die die Luftbewegung in der Falle unterdrücken soll. Im Folgenden werden die einzelnen Teile der Falle etwas genauer beschrieben. 2.1.1 Elektroden Die 3 Elektroden sind der zentrale Teil der Falle, denn zwischen ihnen werden die Teilchen in einem wechselnden elektrischen Feld festgehalten. Abbildung 2: Elektroden Die mittlere Elektrode (die Ringelektrode) besteht aus einer Ringschraube mit einem Innendurchmesser von 2 · r0 = 2, 5cm, die obere und untere Elektrode (die Endkappen) bestehen jeweils aus einer Linsenkopfschraube. Der Abstand der Endkappen voneinander beträgt 2 · z0 = 1, 8cm. Die angenähert hyperboloide Form der Elektroden ist bewusst so gewählt, da die auf ein gefangenes Teilchen wirkende Kraft dann idealerweise linear zur Entfernung des Teilchens von der Fallenmitte zunimmt. Die Elektroden sind schwarz lackiert, um Lichtreflexionen zu vermindern. 3 Die Elektroden sind die einzigen Komponenten, die nicht in der Schulsammlung vorhanden waren, und die wir deshalb kaufen mussten. 2.1.2 Netzgerät und Trafo Die benötigte Spannung wird von einem normalen Netzgerät (bis zu 20 Volt Wechselspannung mit 50 Hertz) geliefert, die dann von einem Transformator mit einem Windungszahlenverhältnis der Spulen von 20:23.000 verstärkt wird. Tatsächlich wird die Spannung aber nicht um das 1150-fache verstärkt, wie es bei einem idealen Transformator der Fall sein müsste, sondern nur um das circa 950-fache (entspricht ca 17,4% Verlust). Um Teilchen stabil in der Falle zu isolieren benötigen wir ca. 8000 Volt Effektivspannung an den Elektroden. Abbildung 3: Schaltplan 2.1.3 Beleuchtungsapparatur und Kamera Um die gefangenen Teilchen auch gut beobachten zu können, benutzen wir eine Apparatur bestehend aus einer Linse und einer Blende, die das Licht einer Lampe genau in die Fallenmitte bündelt. Ohne diese Bündelung würden die Elektroden, trotz ihrer schwarzen Farbe, das eingestrahlte Licht so stark reflektieren, dass eine Aufnahme mit einer Kamera nur schlecht möglich wäre. Um Videos aufzunehmen und um das Falleninnere bei Vorführungen zeigen zu können, benutzen wir eine Schwanenhalskamera und einen Bildschirm beziehungsweise einen Videorecorder. 2.1.4 Windschutz Um unsere Falle vor äusseren Einflüssen, im speziellen Luftbewegungen, zu schützen, befindet sie sich komplett unter einer Plexiglashaube. 2.1.5 Bärlappsporen Die von uns anstelle von Ionen verwendeten Teilchen sind sog. Bärlappsporen. Sie heißen auch Lycopodium und sind die Sporen des Bärlapps Lycopodium clavatum. Die Teilchen sind ca. 3/100 mm groß und hellgelb. 2.2 Entwicklung der Falle Unser Falle sah keineswegs von Anfang an so aus, sondern ist das Ergebniss einer Entwicklung durch die sie immer weiter verbessert wurde. Diese Entwicklung ist auch noch nicht zu Ende, da es immer noch Dinge gibt die einer Verbesserung bedürfen. Die Elektroden unserer ersten Falle waren zwei Nägel und eine Unterlagscheibe und damit keine klar definierten hyperboloiden Elektroden. Unsere aktuellen Elektroden entsprechen einer solchen idealen hyperboloiden Form schon sehr viel besser, jedoch sind sie immer noch nicht perfekt. Diese perfekte Form wäre aber auch gar nicht realisierbar, da sich die Elektroden ins Unendlichen gehen, und sich dort berühren. Die erste Falle wurde 4 Abbildung 4: Bärlappsporen in der Falle nur von einer normalen Lampe beleuchtet und die Elektroden reflektierten das eingestrahlte Licht aufgrund ihrer silbernen Farbe sehr stark. Wir versuchten die Reflexionen zu vermeiden, indem wir einen Laser benutzten, da dieser durch seine definierte Größe und Richtung so gerichtet werden konnte, dass er nicht von den Elektroden reflektiert wurde. Doch ein normaler Laserstrahl war zu schmal um das gesamte Falleninnere auszuleuchten und ein auf die benötigte Grösse aufgeweiteter Laserstrahl war nicht intensiv genug um die Teilchen zu beleuchten. Schliesslich entschlossen wir uns, die unter 2.1.3 beschriebene Beleuchtungsapparatur in Verbindung mit schwarzlackierten Elektroden zu verwenden, um die Reflexionen so gering wie möglich zu halten ohne auf eine genügende Ausleuchtung des Fallenzentrums verzichten zu müssen. Da Luftbewegungen die Bewegungen der Teilchen in der ursprünglichen Falle beeinflussten, bauten wir eine Plexiglashaube um den störenden Einfluss auszuschalten. Mit der ersten Falle versuchten wir Kakao oder Korkmehl zu fangen, jedoch erwiesen sich diese Teilchen als zu inhomogen. Deshalb entschieden wir uns, Bärlappsporen zu benutzen, da diese einheitlichere Eigenschaften aufweisen und somit besser zu fangen sind. 3 Bestimmung der Konstanten Um nun Berechnungen zu ermöglichen, und um realitätsnahe Werte für eine Simulation zu haben, waren die Konstanten der Falle zu bestimmen. Die angelegte Spannung und die Frequenz derselben sind leicht aus dem Aufbau zu erkennen, genauso die Abmessungen der Elektroden. Zu Messen waren also noch die Eigenschaften der Bärlappsporen. Diese sind natürlich keine exakten Werte, da sie Naturprodukte sind, deshalb messen wir Durchschnittswerte. 3.1 Ladungs-Masse Verhältnis Um das Ladungs-Masse Verhältnis q/m zu messen, benutzten wir einen Aufbau ähnlich dem Milikan-Versuch. Ein Plattenkondensator mit variablem Elektrodenabstand wurde waagrecht aufgestellt, und bei einer fest eingestellten Spannung von 3kV Bärlappsporen mit einer möglichst kleinen Geschwindigeit in den Kondensator gebracht. Dann wurde der Abstand auf einen Wert verkleinert, bei dem ein Teil der Bärlappsporen nicht mehr herunterfielen, sondern anfingen zu schweben bzw. nach oben zu wandern. Aus dem einfachen Kräftegleichgewicht Fel = Fg kann nun q/m berechnet werden: E·q =g·m d q ⇔ =g· m U q C ⇒ = 1 · 10−4 m kg 5 3.2 Masse Um die Luftreibung in die Bewegung der Teilchen integrieren zu können, war der Wert der Masse alleine nötig. Außerdem folgt aus der Masse die Ladung, da wir q/m kennen. 3.2.1 Bestimmung durch Wiegen Um das Gewicht einer einzelnen Bärlappspore zu messen, bestimmten wir in einem ersten Versuch das Volumen eines einzelnen Teilchens, berechneten damit die Anzahl der Sporen in einem Becherglas, wogen den Inhalt desselben und teilten das Ergebnis durch die Anzahl der Teilchen. Also legten wir zuerst einige Bärlappsporen auf ein feines Gitter unter ein Mikroskop. 3 Damit konnten wir den Durchmesser der Teilchen mit 100 mm bestimmen. Abbildung 5: Sporen unter dem Mikroskop Da wir die Sporen nur in das Glas einfüllten und nicht pressten, rechneten wir etwas Luft mit ein, indem wir das Volumen einer Bärlappsporen als Würfel mit einer Kantenlänge, die dem Durchmesser einer Bärlappspore entspricht, berechneten. Eine Sporen hat somit das Volumen 2, 7 · 10−14 m3 . 10ml der Bärlappsporen wogen 3,55 kg g, d.h. die Sporen haben eine Dichte von 335 m 3 . Daraus ergibt sich die Masse einer einzelnen Spore von m = 355 3.2.2 kg · 2, 7 · 10−14 m3 = 1 · 10−11 kg m3 Bestimmung per Fallversuch Da die obige Messung aufgrund der geschätzten Luft zwischen den Sporen relativ ungenau ist, versuchten wir zusätzlich, die Masse der Sporen durch einen Fallversuch über die Luftreibung zu bestimmen. Wir ließen einige Bärlappsporen in einem langen zylindrisches Glasgefäß fallen, damit Luftbewegungen das Ergebnis nicht verfälschten. Da sich bei diesem Fallversuch schnell ein Gleichgewicht zwischen der Reibungskraft und der Gewichtskraft einstellt, fallen die Sporen näherungsweise mit einer konstanten Geschwindigkeit. Diese berechnet sich mit v= s 0, 445m m = = 0, 3 t 1, 5s s Die Stokesche Reibungsformel, die für diese Art von Bewegung gilt, lautet: m·g 6·π·η·r v·6·π·η·r ⇔ m = g v = ⇒ m = −5 kg −5 0, 3 m m s · 6 · π · 1, 81 · 10 m·s · 1, 5 · 10 m 9, 81 s2 ⇒ m = 1, 6 · 10−10 kg 6 Der gravierende Unterschied der beiden Massen ist dadurch zu erklären, dass bei der Bestimmung durch Wiegen die Masse als zu klein ermittelt wird, da die Anordnung der Bärlappsporen als Würfel die geringstmögliche Dichte ergibt. Es ist sehr unwahrscheinlich, dass die Sporen tatsächlich genau in dieser Art aufeinanderliegen. Bei der Bestimmung der Masse durch den Fallversuch haben wir die Masse eher als zu groß berechnet, da die Bildung von Luftwirbeln möglich ist und durch die die Reibunskraft vergrößert wird. Daraus folgt bei gleicher Geschwindigkeit eine geringere Masse. Da wir nicht sagen konnten, welches der beiden Massebestimmungsverfahren die Masse genauer bestimmt hat, aber die Masse zwischen diesen beiden Werten liegen muss, verwendeten wir für spätere Berechnungen den Durchschnittswert der beiden Messungen: m = 8, 5 · 10−11 kg Daraus folgt die Ladung mit: q = 8, 5 · 10−15 C 4 Theorie Da es eines unserer Hauptziele war, die Beobachtungen der Teilchenbewegungen auch theoretisch begründen und berechnen zu können, arbeiteten wir eine theoretische physikalische Erklärung aus, mit der wir die Bewegung der Teilchen berechnen und simulieren können. 4.1 Gleichung des Potentials Wie vorher schon erwähnt, ist die Stabilisierung eines elektrisch geladenen Teilchens in einem statischen elektrischen Feld nur in zwei Richtungen möglich. Dies folgt aus der sog. Poissongleichung, die aus einem der 4 Maxwellschen Axiome der Elektrodynamik folgt. Sie gilt für das Potential Φ eines elektrischen Feldes und lautet: d2 Φ d2 Φ d2 Φ + 2 + 2 =0 dx2 dy dz (1) Unser Feld muss aufgrund des Aufbaus der Falle zwei Bedingungen erfüllen: 1. In der Fallenmitte (x = 0 | y = 0 | z = 0) soll die auf ein Teilchen wirkende Kraft, und somit das Feld und das Potential null sein. 2. Die Kraft in der Falle soll von der Fallenmitte aus in jede Richtung linear zunehmen. Das heißt, das elektrische Feld soll ebenfalls linear zunehmen. Da das Potential das Integral des elektrischen Feldes ist, sieht unser Ansatz, bei dem die obigen Bedingungen erfüllt sind, so aus: Φ(x, y, z) = ax2 + by 2 + cz 2 (2) Wenn man nun dieses Potential zweimal nach einer Raumrichtung ableitet, erhält man: d2 Φ dx2 d2 Φ dy 2 d2 Φ dz 2 = 2a = 2b = 2c Dieses in die Poissonsgleichung eingesetzt ergibt: 2a + 2b + 2c = 0 7 (3) Damit die Falle rotationssymmetrisch ist, muss gelten: a = b. Daraus folgt c = −2a. Also heißt das Potential Φ: Φ(x, y, z) = a(x2 + y 2 − 2z 2 ) (4) Aufgrund der Rotationssymmetrie gilt nach Pythagoras: x2 + y 2 = r2 . Daraus folgt: Φ(r, z) = a(r2 − 2z 2 ) (5) Das Potential entspricht der Lageenergie eines Teilchens im elektrischen Feld. Die Teilchen streben immer auf den Punkt des kleinsten Potentials zu, da dort ihre Lageenergie am kleinsten ist. Abbildung 6 zeigt das Potential der Falle in r- und z-Richtung: Abbildung 6: Sattelpotential Hier sieht man anschaulich, dass bei einem solchem statischen Potential das Teilchen nur in einer Richtung (in der Abbildung ist dies die r-Richtung) stabil ist. Dies kann man auch an der Gleichung (5) erkennen, da das Potential Φ nach r und das nach z immer unterschiedliche Vorzeichen haben. Also benötigen wir ein wechselndes Potential, das bedeutet, der Koeffizient a muss eine periodische Funktion enthalten. Das heißt praktisch: es muss an die Elektroden eine Wechselspannung anliegen, also ist U (t) = U0 · sinωt Um nun den Faktor a zu bestimmen müssen wir uns das Potential genauer ansehen. Abbildung 7: Äquipotentialflächen Abbildung 7 ist ein Bild der Äquipotentialflächen (= Flächen gleichen Potentials) des obigen Potentials Φ. Diese sind an jedem Punkt senkrecht zu den elektrischen Feldlinien. Da auf einer Elektrode die Feldlinien immer senkrecht stehen, müssen die Elektroden die Form einer solchen Äquipotentialfläche haben um dieses elektrische Potential zu erzeugen (siehe 2.1.1). Die Äquipotentialflächen können mathematisch als 8 Hyperboloide ausgedrückt werden. Der Potentialunterschied zwischen zwei unterschiedlich geladenen Elektroden entspricht der angelegten Spannung U (t). Da das Potential an den roten Äquipotentiallinien null ist, muss das Potential an Elektrodenoberflächen die Hälfte des Potentialunterschieds zwischen zwei Elektroden, also U2(t) sein. Also ist das Potential Φ(r = r0 | z = 0) = U2(t) und Φ(r = 0 | z = z0 ) = − U2(t) . Eingesetzt in (5) gibt das: a(r02 − 02 ) = U (t) 2 a(02 − 2z02 ) = − (6) U (t) 2 daraus folgt: a · r02 = 2 · a · z02 ⇔ r0 = √ 2z0 (7) außerdem gilt aus (6): a= U (t) 2r02 (8) Daraus ergibt sich die Gleichung des Potentials: Φ(r, z) = Φ(x, y, z) = U (t) · (r2 − 2z 2 ) 2r02 U (t) · (x2 + y 2 − 2z 2 ) 2r02 (9) (10) Die Formel für U (t) eingesetzt ergibt dann: Φ(r, z, t) = Φ(x, y, z, t) = U0 · sinωt · (r2 − 2z 2 ) 2r02 U0 · sinωt · (x2 + y 2 − 2z 2 ) 2r02 (11) (12) Mit diesen Gleichungen lassen sich nun die Bewegungsgleichungen herleiten. 4.2 Bewegungsgleichungen Die von uns im Folgenden hergeleiteten Bewegungsgleichungen sind Näherungen ohne Berücksichtigung von Gravitation und Reibung. Außerdem venachlässigen sie die Existenz der Elektroden, die die Bewegungsmöglichkeiten der Teilchen einschränken. Das Potential nach einer Bewegungsrichtung abgeleitet ergibt das elektrische Feld E: dΦ E(x) dx E(y) = − dΦ dy dΦ E(z) dz Da das elektrische Feld multipliziert mit der Probeladung die auf die Probeladung wirkende Kraft ergibt, gilt: dΦ F (x) dx F (y) = −q · dΦ dy dΦ F (z) dz 9 Aus der auf ein Teilchen wirkenden Kraft ergibt sich durch das 2. Newtonsche Axiom F = m · a: dΦ a(x) dx q a(y) = − · dΦ dy m dΦ a(z) dz Mit dem Potential aus (11) abgeleitet und eingesetzt ergibt dies: d2 x(t) x(t) dt2 q U 2 d y(t) 0 dt2 = − · 2 · sinωt · y(t) m r 2 0 d z(t) −2z(t) dt2 (13) Dieses System von Differentialgleichungen zweiter Ordnung vom Typ Matthieusche Differentialgleichung ist mit unserem Kenntnisstand nicht lösbar. Da die Bewegung in eine Raumrichtung jedoch von der in eine andere unabhängig ist, ist es ohne größeren Aufwand möglich, die Bewegung in nur einer Richtung mit dem Computer zu simulieren. Abbildung 8: Simulation x/t Dieses Bild zeigt die Bewegung eines Teilchens in einer Richtung abhängig von der Zeit. 4.3 Teilung in Mikro- und Makrobewegung Wie man an Abbildung 8 sieht, lässt sich die Bewegung eines Teilchens näherungsweise als eine Überlagerung einer schnellen Oszillation mit kleiner Amplitude, die wir Mikrobewegung nennen, und einer langsamen Oszillation mit großer Amplitude, die wir Makrobewegung nennen, beschreiben. Diese Näherung gilt allerdings nur wenn: 1. die Frequenz der Mikrobewegung sehr viel schneller als die der Makrobewegung ist und 2. die Amplitude der Mikrobewegung sehr viel kleiner als die der Makrobewegung ist. Um eine differenziertere mathematische Vorstellung der Bewegung zu bekommen betrachten wir diese zwei Bewegungen nun etwas genauer. Zur mathematischen Beschreibung führen wir folgende Definitionen ein: ω: Kreisfrequenz der Mikrobewegung s(t): Mikrobewegung Ω: Kreisfrequnz der Makrobewegung 10 x̄(t): Makrobewegung in eine Raumrichtung, gemittelt über eine Periode der Mikrobewegung Die Bewegung in eine Raumrichtung x(t) kann näherungsweise als Summe der Teilbewegungen ausgedrückt werden: x(t) = x̄(t) + s(t) 4.3.1 (14) Mikrobewegung Wenn die obigen Bedingungen erfüllt sind, können wir annehmen, dass während einer Periode der Mikrobewegung die Makrobewegung die Position x̄(t) des Teilchens nur unwesentlich verändert hat. Wir sehen x̄ also als zeitunabhängig an. Deweiteren kann s(t) als Bestandteil von x(t) vernachlässigt werden, da die Amplitude aufgrund der geforderten Bedingungen sehr gering ist. Nun folgt aus (14): x(t) = x̄ (15) Da wir zunächst nur eine der drei Raumrichtungen betrachten, ergibt sich aus (13) und (15): q U0 d2 s(t) = − · 2 · sinωt · x̄ 2 dt m r0 Durch zweimalige Integration dieser Gleichung ergibt sich unter Einbeziehung von (15): s(t) = q U0 · · sinωt · x̄ m r02 · ω 2 (16) An dem Faktor x̄ sieht man, dass die Amplitude der Mikrobewegung proportional zur Auslenkung der Makrobewegung ist. Außerdem ist die Amplitude der Mikrobewegung umgekehrt proportional zum Quadrat ihrer Kreisfrequenz ω. Abbildung 9: Diagramm mit halbem ω In diesem Diagramm hat sich im Vergleich zu Abbildung 8 die Kreisfrequenz der Mikrobewegung halbiert. Man sieht deutlich, dass die Amplitude der Mikrobewegung größer geworden ist. Außerdem hat sich auch noch die Frequenz der Makrobewegung verdoppelt. Dieses Verhalten soll im folgenden Abschnitt erklärt werden. 4.3.2 Makrobewegung Um die Makrobewegung x̄(t) zu bestimmen, müssen wir die im Mittel auf ein Teilchen wirkende Kraft F̄ (x, t) ermitteln. Im Mittel heißt hier über die Periode einer Mikrobewegung gemittelt. Da wir uns die Bewegung x(t) als Summe der Mikrobewegung s(t) 11 und der Makrobewegung x̄(t) vorstellen, gilt: F (x, t) ⇔ F (x, t) U0 · sinωt · x(t) r02 U0 = −q · 2 · sinωt · [x̄(t) + s(t)] r0 = −q · Über eine Peridode der Mikrobewegung gemittelt ergibt dies: F̄ (x, t) = M ittelwert[−q · U0 U0 · sinωt · x̄(t)] + M ittelwert[−q · 2 · sinωt · s(t)] r02 r0 sinωt · x̄(t) ergibt über eine Periode der Mikrobewegung gemittelt näherungsweise 0, da sich x̄(t) nach Voraussetzung während dieser Periode so gut wie nicht ändert und deshalb als konstanter Faktor betrachtet werden kann. ⇒ F̄ (x, t) = 0 − q · U0 · M ittelwert[sinωt · s(t)] r02 Die Mikrobewegung (16) eingesetzt in die Gleichung der Kraft F̄ (x, t) ergibt: F̄ (x, t) F̄ (x, t) U0 q U0 1 · M ittelwert[sinωt · · · · x̄(t) · sinωt] r02 m r02 ω 2 U0 q U0 1 = −q · 2 · M ittelwert[ · 2 · 2 · x̄(t) · sin2 ωt] r0 m r0 ω = −q · Über eine Periode der Mikrobewegung gemittelt ergibt sin2 ωt den Wert 0, 5. F̄ (x, t) = −q · F̄ (x, t) = − U0 q U0 1 · · · · x̄(t) · 0, 5 r02 m r02 ω 2 q 2 U02 1 · · · 0, 5 · x̄(t) m r04 ω 2 (17) Am negativen Vorzeichen kann man erkennen, dass die gemittelte Kraft F̄ immer rücktreibend zum Fallenzentrum gerichtet ist. Außerdem sieht man am Quadrat der Ladung, dass deren Vorzeichen für die Kraftrichtung unerheblich ist. Mit F = m · a ergibt sich die Differentialgleichung der gemittelten Makrobewegung: d2 x̄(t) q2 U 2 1 = − 2 · 40 · 2 · 0, 5 · x̄(t) 2 dt m r0 ω (18) Man sieht an dieser Formel, dass die Makrobewegung eine harmonische Schwingung ist, da ihre Gleichung dem allgemeinen Muster einer harmonischen Schwingung entspricht. 2 Dieses lautet d dts(t) = −k · s(t), wobei die Konstante k je nach Art der Schwingung 2 √ verschieden ist. Es gilt allerdings immer: ω = k. Daraus ergibt sich die Kreisfrequenz der gemittelten Makrobewegung Ω: Ω= q U0 1 p · · · 0, 5 m r02 ω (19) Man sieht hier, dass Ω proportional zu ω1 ist. Das heißt, eine Verdoppelung der Frequenz der an den Elektroden anliegenden Wechselspannung hat die Halbierung der Frequenz der Makrobewegung zufolge. Dies kann man leicht an Abbildung 8 und Abbildung 9 sehen. 12 Abbildung 10: Diagramm r/z ohne Stoke-Reibung 4.4 Reibung Die in den letzten Abschnitten hergeleiteten Formeln vernachlässigen alle den Einfluss der Luftreibung auf die Bewegung der Teilchen. Abbildung 10 ist ein Diagramm der Bahn eines Teilchens in zwei Dimensionen. Diese Bewegung stimmt offensichtlich nicht mit der realen Falle überein, da im realen Expriment von der Makrobewegung aufgrund der Reibung kaum noch etwas zu sehen ist. Im Folgenden wollen wir diesen Einfluss rechnerisch bestimmen. Es gibt grundsätzlich zwei verschiedene Reibungsgesetze, das von uns bei der Bestimmug der Konstanten schon verwendete Stoke-Gesetz, welches für langsame Bewegungen gilt, und das Gesetz zur Berechnung der turbulenten Luftreibung. Aufgrund der Tatsache, dass die Geschwindigkeit der Teilchen bei ca. 1 m/s liegt, ist zu erwarten, dass das Stokesche Reibungsgesetz zutrifft. Um dies zu bestätigen, simulierten wir die Teilchenbewegung mit beiden Gesetzen. Dabei stellte sich heraus, dass nur das Stokesche Reibungsgesetz unseren Beobachtungen an der realen Falle entsprach. Die Abbildung 11 zeigt die Simualtion mit der Stoke-Reibung. Die Makrobewegung wird sehr stark abgebremst, Abbildung 11: Diagramm r/z mit Stoke-Reibung was sich auch mit unseren Beobachtungen deckt. Die Bewegungsgleichung (13) ergibt zusammen mit dem Stokeschen Gesetz F = 6πηrv die folgende Gleichung: d2 x(t) dx(t) x(t) 2 dt dt q U0 6πηr dy(t) d2 y(t) · 2 · sinωt · y(t) − · dt dt2 = m r m 2 0 dz(t) d z(t) −2z(t) dt dt2 (20) 13 4.5 Gravitation Der Einfluss der Gravitation auf die Bewegung der Teilchen ist marginal, da er die Makrobewegung der Teilchen nur um ein geringen Faktor nach unten verschiebt. Die Amplitude der Mikrobewegung wird durch die Gravitation im Punkt des Kräftegleichgewichts nicht mehr null, da dieser nicht mehr mit dem Mittelpunkt des elektrischen Feldes zusammenfällt. Die Gravitation lässt sich in der Simulation recht leicht berücksichtigen, da nur die Erdbeschleunigung von der Beschleunigung in z-Richtung subtrahiert werden muss. Es ergibt sich ausgehend von (20) folgende Formel: d2 x(t) dx(t) x(t) 0 2 dt dt q U 6πηr 2 d y(t) 0 0 · 2 · sinωt · y(t) − · dy(t) − dt2 = dt m r m 2 0 dz(t) d z(t) −2z(t) 9, 81 sm2 dt dt2 (21) Damit ergibt sich dann unsere beste Annäherung an die Wirklichkeit: Abbildung 12: Diagramm r/z mit Reibung und Gravitation Wie man erkennen kann, wird die Makrobewegung nach kurzer Zeit vollständig von der Luftreibung unterdrückt. Stattdessen nähert sich das Teilchen mit der Mikrobewegung oszillierend einer stabilen Position unterhalb der Fallenmitte. Die Abbildung 4 auf der Seite 5 zeigt diese Bewegung, wobei aufgrund der relativ langen Belichtungszeit die Teilchen als Striche erscheinen. 5 Simulationen Da wir unsere hergeleiteten Gleichungen nicht direkt am Realexperiment überprüfen können, simulierten wir die Teilchenbahnen mit dem Computer und verglichen diese Ergebnisse mit der Wirklichkeit. Die erzielte Übereinstimmung zwischen Simulation und Wirklichkeit ist ein guter Anhaltspunkt dafür, dass unsere Theorie stimmt. Die meisten Ergebnisse der Simulationen sind in diesem Dokument verteilt zu finden. Zusätzlich zu diesen Diagrammen haben wir noch eine dreidimensionale Animation der Bewegung eines gefangenen Teilchens erstellt. Diese befindet sich mit einer Animation des Sattelpotentials auf der beigefügten CD. Die Diagramme erstellten wir mit dem Programm des Klett-Verlags Moebius, die Animationen mit Maple 7. 14 6 Fehlereinschätzung Folgende Dinge verschlechtern die Übereinstimmung von Theorie und Wirklichkeit: 1. Die Oberflächenform der Elektroden entspricht nur grob den hyperboloiden Äquipotentialflächen der Theorie. 2. Die spezifische Ladung und die Masse der Bärlappsporen konnten von uns nur grob bestimmt werden, außerdem schwanken diese Werte auch, da die Sporen Naturprodukte sind. 3. Die Reibung konnte von uns nicht exakt bestimmt werden, da auch ein Zwischenzustand zwischen beiden Reibungsgesetzen möglich ist. 4. Die Teilung in Mikro- und Makrobewegung gelingt nur unter gewissen Annahmen und Vereinfachungen. Die Punkte 1-3 haben zur Folge, dass die tatsächliche Bewegungsbahn der Teilchen von der Berechneten bzw. Simulierten abweicht. Punkt 4 hat nur auf die in dem betreffenden Abschnitt hergeleiteten Formeln Einfluss, da diese nicht zur Simulation, sondern nur zum Verständnis benötigt werden. 7 Schlusswort Abschließend kann man sagen, dass unsere Falle eine anschauliche und einfache Möglichkeit ist, die Funktionsweise einer realen Paulfalle zu verdeutlichen, und einen theoretischen Zugang zu diesem Gebiet zu bekommen. Unsere Gleichungen sind zwar nur begrenzt zutreffende Beschreibungen, allerdings lassen sich damit alle wichtigen Eigenschaften der Falle erklären und sogar eine weitestgehend zutreffende Simulation erstellen. Zum Schluss wollen wir noch allen danken, die uns bei unserer Arbeit unterstützt haben: • Herr Hirlinger • Heinz Fritz Kunststoffverarbeitung 8 Quellen Folgende Quellen haben wir verwendet: • Video der Uni Mainz von Prof. Quast • Staatsexamenszulassungsarbeit von Margit Fries am Max-Planck-Institut für Quantenoptik in Garching unter Leitung von Prof. Dr. H. Walther 1991 9 Anlagen Diesem Dokument ist eine CD beigefügt, die Folgendes enthält: • Video der Falle • 3D Animation (Simulation) als .gif und als .mws (Maple Worksheet) • Animation des Sattelpotentials als .gif und als .mws • Videoplayer 15