Kein Folientitel - TSV Weikersheim
Werbung

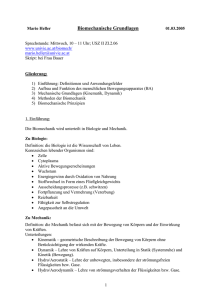
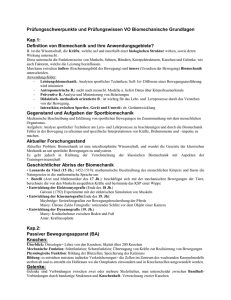
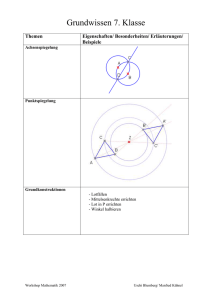
Biomechanik Was ist denn das ??? © Copyright by Birgit Naberfeld & Sascha Kühnel Was ist Biomechanik Seite 2 Was ist Biomechanik? Definitionen: "Die Biomechanik des Sports ist die Wissenschaft von der mechanischen Beschreibung und Erklärung der Erscheinungen und Ursachen von Bewegungen im Sport unter Zugrundelegung der Bedingungen des menschlichen Organismus". (Willimczik, Bewegungswissenschaft) "Die Biomechanik erforscht die Form der Bewegungsabläufe von Lebewesen, die mechanischen Kräfte, die auf die Lebewesen einwirken, und die Wirkung derjenigen mechanischen Kräfte, die von den Lebewesen erzeugt werden. Außerdem untersucht die Biomechanik den Zusammenhang zwischen der Wirkung der Kräfte und der Form der Bewegungsabläufe. Um diese rein physikalischen Aufgaben erfüllen zu können, ist es notwendig, daß sich die Biomechanik auch mit dem Körperbau des Lebewesens befaßt; denn erst die Gesamtbetrachtung des Baues und der Funktion des Körpers liefert gültige Ergebnisse. ... Außerdem muß die Biomechanik die physiologischen Gesetze des Körpers in die Betrachtung mit einbeziehen und sie tut gut daran, sich an die Biologie zu wenden, um den Bau und die Funktion eines Organismus aus dem Gang der Entwicklungsgeschichte zu verstehen. Erst die umfassende Erforschung der mechanischen Umwelt, der Struktur und der Funktion eines Lebewesens liefert biomechanische Prinzipien. Diese machen eine Aussage über die bestmögliche Ökonomie einer organischen Bewegung." (Wiemann,Sportkunde) © Copyright by Birgit Naberfeld & Sascha Kühnel Definitionen Seite 3 Definitionen: Masse Masse ist eine physikalische Grundgröße, die die Eigenschaften der Schwere und der Trägheit eines Körpers kennzeichnet. Kraft Die Kraft ist diejenige Wirkung auf einen Körper (eine Masse), die zur Änderung des Bewegungszustandes (= zur Beschleunigung) des Körpers führt. Die Kraft (F), die einen Körper beschleunigt, ist definiert nach Betrag und Richtung durch die Masse (m) und die Beschleunigung (a) des Körpers: F = m * a [N (Newton)] Geschwindigkeit Geschwindigkeit wird definiert durch Weg und Zeit. Je schneller man eine gewisse Strecke zurücklegt, desto größer ist die eigene Geschwindigkeit V = s / t [m / s (Meter / Sekunde) oder km / h (Kilometer / Stunde)] Beschleunigung Die Beschleunigung ist abhängig von Geschwindigkeit und Zeit. a = v / t [m / s² ] Druck Druck wird definiert durch die Kraft, die auf eine gewisse Fläche einwirkt. Je größer die Kraft bzw. je kleiner die Fläche, desto stärker ist der auftretende Druck. P= F / A [N (Newton)] Impuls Der Impuls beschreibt den Bewegungszustand (fortschreitende Bewegung) eines Körpers ( Masse) nach Richtung und Geschwindigkeit. p= m * v Impulsübertragung Trifft ein bewegter Körper auf einen anderen Körper (oder wird dieser abgebremst) kommt es zu einer Impulsübertragung (z.B. Kopfwurf) Impulsübertragungen durch Abbremsen eines oder mehrerer Körperteile spielen im Sport eine wichtige Rolle. Drehmoment Das Drehmoment (die Drehkraft) ist die Wirkung auf einen Körper (eine Masse), die zu einer Drehbeschleunigung des Körpers um eine Achse führt. Das Drehmoment ist definiert nach Betrag und Richtung durch das Produkt aus der Kraft F und dem senkrechten Abstand (r) der Kraft von der Drehachse. M=F*r © Copyright by Birgit Naberfeld & Sascha Kühnel Newtonsche Axiome Seite 4 Newtonsche Axiome 1. Ein Körper beharrt im Zustand der Ruhe oder der gleichförmig geradlinigen Bewegung, solange keine äußeren Kräfte auf ihn wirken. 2. Die Kraft F, die einer Masse m die Beschleunigung a erteilt ist gleich dem Produkt m⋅a. 3. Übt ein Körper A auf einen Körper B eine Kraft aus, so übt auch B eine Kraft auf A aus. Beide Kräfte sind gleich groß, aber von entgegengesetzter Richtung. 12 10 8 6 4 2 0 -2 -4 -6 -8 -10 -12 6 5 4 3 2 1 0 -1 -2 -3 -4 -5 -6 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Zeit t [s] © Copyright by Birgit Naberfeld & Sascha Kühnel Beschleunigung a [m/s^2] Geschwindigkeit v [m/s] Geschwindigkeit-Zeit-Diagramm Beschleunigung-Zeit-Diagramm Körperschwerpunkt Seite 5 In der Biomechanik arbeiten wir mit Modellen. Warum? Der menschliche Körper ist zu komplex für die mechanische Analyse. Einfachstes Modell des menschlichen Körpers: 1. Der Körperschwerpunkt (KSP) Die in einem Punkt vereinigt gedachte Masse des Körpers. Die Lage des KSP ist abhängig von der Anordnung der Körperteile und ihrer Massen. KSP Die Gewichtskraft G der Person wirkt am KSP. G Der Körperschwerpunkt kann aber auch außerhalb des Körpers liegen. KSP G © Copyright by Birgit Naberfeld & Sascha Kühnel Phasen eines Sprungs F [N] v [m/s] s [cm] P [W] © Copyright by Birgit Naberfeld & Sascha Kühnel Seite 6 Kraft Geschwindigkeit Sprunghöhe Leistung Körperachsen und Ebenen Seite 7 Drehachsen des menschlichen Körpers a - Horizontalachse (Tiefenachse); Hauptbewegungsrichtung parallel zum Boden/Erdoberfläche b - Vertikalachse (Längsachse) senkrecht zur Erdoberfläche c - Querachse (Breitenachse) quer zur Haupbewegungsrichtung und parallel zur Erdoberfläche Man sieht sofort, daß man z.B. beim • Salto um die Körperquerachse (Breitenachse) • Rad um die Tiefenachse (Sagittalachse) • Pirouette um die Körperlängsachse (Longitudinalachse) rotiert. Ebenen des menschlichen Körpers A - Horizontalebene B - Sagittalebene C - Frontalebene b B A a c C © Copyright by Birgit Naberfeld & Sascha Kühnel Kräfte Seite 8 Kräfte und Kräftegleichgewicht W F G=-B W=-F G und B sind gleich groß, aber entgegengesetzt gerichtet. G B Kräfte = 0 Druck und Fläche Wirkt eine Kraft auf eine Fläche, so wird auf diese Fläche ein Druck ausgeübt. Je größer die Kraft und je kleiner die Fläche, desto größer ist der Druck. F1 = 10 N 1 kg F2 = 10 N 1 kg A1 = 1/2 * A2 A = Fläche P = Druck © Copyright by Birgit Naberfeld & Sascha Kühnel P1 = 2 * P2 Vektoren und resultierende Kraft Seite 9 Vektoren und resultierende Kraft FV FR FH Kräfte werden durch Vektoren dargestellt, wobei die Pfeilrichtung die Kraftrichtung anzeigt. Aus zwei (oder mehreren) Kräften läßt sich eine resultierende Kraft (FR) berechnen. dF = FHOR2 - FHOR1 dF FHOR1 FHOR2 Trifft man bei einem Fauststoß das Ziel nicht geradlinig, sondern in einem Winkel, so verringert sich die Kraft, die auf das Ziel einwirkt. © Copyright by Birgit Naberfeld & Sascha Kühnel Biomechanik der Würfe Seite 10 Biomechanik im menschlichen Körper r α 50 kg Belastung auf die Wirbelsäule: 0° = 720 kg 30° = 630 kg 60° = 360 kg 90° = 90 kg r 50 kg © Copyright by Birgit Naberfeld & Sascha Kühnel Je weiter man sich abbeugt (je kleiner α ist), umso größer ist das Drehmoment, das an der Lendenwirbelsäule angreift. Drehmoment Seite 11 Drehmoment Wirkt eine Kraft nicht auf den Körperschwerpunkt, sondern etwas davon entfernt auf den Körper, so ergibt sich ein Drehmoment, daß sich aus dem Abstand zum KSP und der angreifenden Kraft. M=F*r Je größer der Abstand (r), desto weniger Kraft muß man zum Drehen aufwenden. F1 F2 KSP r Je kompakter der Körper zusammen ist, desto schneller kann er sich drehen. © Copyright by Birgit Naberfeld & Sascha Kühnel Drehmoment Seite 12 Drehmoment 1 1 1 2 Kraft * Kraftarm = Last * Lastarm Z.B. 10 N * 1m = 10 N * 1m 10 N * 1m = 20 N * 0,5m Drehmomente = 0 Hebel: Kraftarm © Copyright by Birgit Naberfeld & Sascha Kühnel Lastarm Hebel & Gelenke Gelenkart Seite 13 Bild Ellipsoid- Beispiele oberes Kopfgelenk gelenk Sattel- Handwurzel-Mittelhandgelenk gelenk des Daumens Kugel- Hüftgelenk gelenk Schanier- kleine Fingergelenke gelenk Dreh- unteres Kopfgelenk gelenk Im Ju-Jutsu arbeiten wir mit Streck-, Beuge- und Drehhebeln, sowie deren Mischformen. © Copyright by Birgit Naberfeld & Sascha Kühnel Biomechanik der Würfe Seite 14 Wurfsystematik nach Gleeson Nach Gleeson werden die Würfe in 4 Kategorien unterteilt, gemäß ihrer Art und Richtung, in die das Gleichgewicht von Uke gebrochen wird: 1. den „Roller“ 2. den „Stoßer“ 3. den „Heber“ 4. die Tricks Zieht man eine Linie durch Ukes Füße, so gibt es eine „unstabile“ oder auch schwache Richtung (nach vorne), und eine „stabile“ oder auch starke Richtung (zur Seite). Zur schwachen Richtung hin ist Uke jedoch mobiler und zur starken Richtung hin kann er nur mühsam ausweichen. Daher kann man nicht unbedingt folgern: schwache Richtung gut, starke Richtung schlecht zum Gleichgewicht brechen. 1. beim „Roller“ wird Uke in die schwache Richtung über ein Hindernis gerollt, 2. beim „Stoßer“ reißt ein Kräftepaar Ukes Schultern in eine Richtung, seine Füße in die entgegengesetzte, entlang der starken Linie. 3. ein typischer „Heber“ ist z.B. der Hüftwurf 4. „Tricks“ sind die Würfe, die nicht klassifizierbar sind Die Roller und die Stoßer sind die Haupttypen, die am häufigsten vorkommen. © Copyright by Birgit Naberfeld & Sascha Kühnel Übersichtstabellen © Copyright by Birgit Naberfeld & Sascha Kühnel Seite 15