Technisch-Ökonomische Wartesysteme - WiSo
Werbung

Operations Research und Wirtschaftsinformatik
Prof. Dr. P. Recht // M.Radermacher, M.Sc.
DOOR
Mastermodul Operations Research IV:
Technisch-Ökonomische Wartesysteme
Skriptum zur Veranstaltung
im Sommersemester 2016
Stand: 12. Juli 2016
Das Fachgebiet im Internet:
• http://www.wiso.tu-dortmund.de/wiso/or/de/ •
Inhaltsverzeichnis
1 Einführung
2 Eine
2.1
2.2
2.3
2.4
2
kurze Wiederholung zur Wahrscheinlichkeitstheorie
Begrifflichkeiten . . . . . . . . . . . . . . . . . . . . . . . . .
Unabhängigkeit und bedingte Wahrscheinlichkeit . . . . . .
Zufallsvariablen und Verteilungen . . . . . . . . . . . . . . .
Zusammenstellung von im Weiteren benötigten Sachverhalte
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
10
10
11
13
22
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
24
4 Das Wartesystem M |M |1
4.1 Stationären Verteilungen in M |M |1-Wartesystemen . . . . . . . . . . . . . . . .
4.1.1 Zeitabhängige Analyse des Systems . . . . . . . . . . . . . . . . . . . . .
4.1.2 Zeitunabhängige Analyse; stationärer Zustand bzw. Gleichgewichtszustand
4.2 Die Pasta-Eigenschaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Verkehrsintensität; Auslastung eines Wartesystems . . . . . . . . . . . . . . . .
4.4 Little’sche Formeln oder Little’sches Gesetz . . . . . . . . . . . . . . . . . . . .
4.5 Ein M |M |1-System mit einer (speziellen) Prioritätsbedienung . . . . . . . . . .
4.6 Der Austrittsprozess; Burke’sches Gesetz . . . . . . . . . . . . . . . . . . . . . .
4.7 Eine (elementare) Supply Chain als M |M |1-Wartesystem . . . . . . . . . . . .
37
37
38
40
42
42
48
50
51
54
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer
systeme
5.1 Homogene Markov-Ketten mit stetiger Zeit, stationäre Markov-Ketten .
5.2 Bestimmung einer stationären Verteilung p∗ . . . . . . . . . . . . . . . .
5.3 Modellierung allgemeinere Ankunfts- und Bedienprozesse . . . . . . . .
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
6.1 Wartesystem vom Typ M |M |1 mit ungeduldig ankommenden Kunden
6.1.1 Erfassungsrate und effektive Ankunftsrate . . . . . . . . . . . .
6.2 Wartesysteme vom Typ M |M |m . . . . . . . . . . . . . . . . . . . . .
6.3 Ein Wartesystem vom Typ M |M |∞: Selbstbedienung . . . . . . . . .
6.4 Ein Wartesystem vom Typ M |M |m|K . . . . . . . . . . . . . . . . . .
6.5 Wartesysteme vom Typ M |M |m|0 bzw. M |G|m|0 . . . . . . . . . . . .
6.6 Ein spezielles „geschlossenes“ Wartesystem vom Typ M |M |m . . . . .
.
.
.
.
.
.
.
Warte. . . .
. . . .
. . . .
58
59
62
66
.
.
.
.
.
.
.
69
69
71
72
78
81
84
87
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
93
7.1 Ein Wartesystem vom Typ M |M |1|K mit Gruppenbedienung . . . . . . . . . . 93
7.2 Ein M |M |m|0 Wartesystem mit Gruppenbedienung . . . . . . . . . . . . . . . 96
7.3 Ein M |M |m|K|SIRO Wartesystem mit Gruppenankünften . . . . . . . . . . . . 100
i
7.4
Ein Wartesystem vom Typ M |Erl(µ, r)|1 . . . . . . . . . . . . . . . . . . . . . 103
8 Netzwerke von Wartesystemen
108
8.1 Ein elementares Netzwerk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
8.2 Offene Netzwerke von Wartesystemen . . . . . . . . . . . . . . . . . . . . . . . 111
9 Wartesysteme mit Prioritäts-Bedienung
117
9.1 Das System M|M|m|K1 = 0, K2 = 0|Prio| – mit Unterbrechung . . . . . . . . . 117
9.2 Das System M|M|m|K1 , K2 |Prio| – mit Unterbrechung . . . . . . . . . . . . . . 119
10 Anhang: Eine kleine Einführung in die Simulation
10.1 Simulation von Zufallsexperimenten . . . . . . . . . . . . . . . . . . . . .
10.2 Verfahren zur Erzeugung gleichverteilter Zufallszahlen . . . . . . . . . . .
10.2.1 Linearer Kongruenz-Generator (Methode der linearen Kongruenz)
10.2.2 Inverser Kongruenzgenerator . . . . . . . . . . . . . . . . . . . . .
10.3 Erzeugung nicht gleichverteilter Zufallsvariablen . . . . . . . . . . . . . . .
10.3.1 Allgemeiner Ansatz/Inversionsmethode . . . . . . . . . . . . . . .
10.3.2 Rejektions-/Verwerfungsmethode . . . . . . . . . . . . . . . . . . .
10.3.3 Verfahren zur Erzeugung spezieller Zufallszahlen . . . . . . . . . .
10.3.4 Gütetests der erzeugten Verteilungen . . . . . . . . . . . . . . . . .
Literaturverzeichnis
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
121
122
123
123
124
125
125
127
127
128
131
ii
Kapitel 1
1
1 Einführung
In dieser Veranstaltung soll ein Überblick gegeben werden über
• Eine Theorie der technisch-ökonomischen Wartesysteme,
• ihre Bedeutung innerhalb technisch-ökonomischer Entscheidungsprobleme,
• Techniken und Methoden zur Analyse von Wartesystemen.
Die Kenntnis des „Funktionierens“ von Wartesystemen ist oft von großem ökonomischen Nutzen, deshalb muss man Informationen gewinnen, die eine effiziente Gestaltung eines Wartesystems zulassen.
Beispiele in denen Wartesysteme auftreten:
• Kasse im Lebensmittelgeschäft
• Tankstelle
• Abfüllanlagen
• Studentensekretariat
• Hotlines
• Mensa
• Fertigungssysteme
• Fußgängerampel
• Pannenservice des ADAC
• Operationen im Krankenhaus
• Organverpflanzungen
Definition 1.1
Unter einem technisch-ökonomischen Wartesystem verstehen wir ein technisch-ökonomisches System, bestehend aus einer Menge von „Kunden“, einer Menge von „Bedienstationen“ (an denen die Kunden bedient werden sollen bzw. wollen) und einem Regelwerk,
nach welchem die Kunden an die Bedienstationen herantreten („Ankunftsmuster“) bzw.
einem Regelwerk, nach welchem die Kunden von den Bedienstationen abgefertigt werden
(„Bedienungsmuster“). Die Menge von ankommenden Kunden vor der (den) Bedienstation(en), die noch nicht abgefertigt werden, heißt „Warteschlange“.
2
1 Einführung
OR II c, Master-Modul IV
Beispiel 1.2
Die nachfolgenden Abbildungen 1.1, 1.3 und 1.2 stellen drei technisch-ökonomische Wartesysteme dar, einmal mit einer Warteschlange vor einer Bedienstation, einmal mit einer Warteschlange vor zwei Bedienstationen und einmal mit zwei Warteschlangen vor zwei Bedienstationen.
Bedienstation
Warteschlange
Kunden- Ankunftsquelle
muster
Bedienungsmuster
Systemaustritt
Abbildung 1.1: Wartesystem mit einer Warteschlange vor einer Bedienstation
Bedienstation 1
Warteschlange 1
Warteschlange 2
Bedienstation 2
Kunden- Ankunftsquelle
muster
Bedienungsmuster
Systemaustritt
Abbildung 1.2: Wartesystem mit zwei Warteschlangen vor zwei Bedienstationen
Bedienstation 1
Warteschlange
Bedienstation 2
Kunden- Ankunftsquelle
muster
Bedienungsmuster
Systemaustritt
Abbildung 1.3: “Amerikanische“ Warteschlange: eine Warteschlange vor zwei Bedienstationen;
Wir werden in dieser Veranstaltung Modelle technisch-ökonomischer Wartesysteme betrachten,
die Abbild gewisser realer Wartesysteme sind. Bei dieser Modellbildung werden wir uns auf
die wesentlichen Eigenschaften der organisatorischen Struktur konzentrieren. Bereits im OR I
haben wir versucht, eine bestimmte Typisierung vorzunehmen.
Wir haben bereits kennengelernt, dass wir technisch-ökonomische Wartesysteme durch folgende
fünf wesentlichen Komponenten charakterisieren können.
3
1 Einführung
OR II c, Master-Modul IV
(i) Das Ankunftsmuster
Das Ankunftsmuster, d. h. die Gesetzmäßigkeit, nach der „Kunden“ das technisch-ökonomische Wartesystem „betreten“, wird normalerweise durch die „Zwischenankunftszeiten“ τ = (τi )i=1,2,... , d. h. die Zeit zwischen den aufeinanderfolgenden Ankünften zweier
Kunden angegeben. Diese kann deterministisch (d. h. a priori exakt bekannt) sein. Im Allgemeinen ist sie jedoch eine Zufallsvariable, deren Verteilung als bekannt vorausgesetzt
wird oder aufgrund von Beobachtungen ermittelt werden kann.
Zwischenankunftszeit ¿
Ankunftszeitpunkt des
i-ten Kunden
¿1
¿2
¿3
¿4
¿5
t
T=0
Kunden
T1
T2
T3
T4
T5
Kunde 1 Kunde 2 Kunde 3 Kunde 4 Kunde 5
τ deterministisch: τ a priori exakt bekannt, d. h. (τi )i=1,2,... bekannt.
τ Zufallsvariable: Verteilung von τ bekannt, d. h. P (τ ≤ t) ist bekannt für alle t ∈ R+ .
Darüber hinaus kann es auch sein, dass die Kunden nicht einzeln das Wartesystem betreten, sondern in Gruppen zusammengefasst und dann in das Wartesystem aufgenommen
werden.
(ii) Das Bedienungsmuster
Das Bedienungsmuster, d. h. die Gesetzmäßigkeit, nach der die einzelnen Kunden von den
Bedienstationen abgefertigt werden, wird durch folgende drei Größen charakterisiert:
a) Die „Bedienzeit“ (engl. service) S, d. h. die Zeit, die eine Bedienstation benötigt,
um einen Kunden zu bedienen.
Kunde Nr.
1
2
3
4
5
Bedienzeit S
S1
S2
S3
S4
S5
Auch hier kann S deterministisch sein, d. h. die einzelnen Bedienzeiten der Kunden
(Si )i=1,2,... sind a priori exakt bekannt. Dies ist beispielsweise bei bestimmten Fertigungsprozessen der Fall, bei denen etwa die Bearbeitungszeit eines Objektes auf
einer Maschine stets die exakt gleiche Zeitdauer benötigt. Meist ist jedoch S eine
zufällige Größe. Wir werden voraussetzen, dass für die Dauer der Bedienzeit eines
Kunden diese Bedienstation nicht für neu eintreffende Kunden zugänglich ist.
b) Die Anzahl m von „Bedienstationen“ (engl. server), die für die Bedienung der
Kunden zur Verfügung steht. Wird dabei angenommen, dass ein ankommender Kunde sofort bedient wird, falls er eine freie Service-Station vorfindet, und dass alle freien
Geräte in gleicher Weise für alle ankommenden Kunden zugänglich sind, so spricht
4
1 Einführung
OR II c, Master-Modul IV
man manchmal von einem System mit vollkommener Erreichbarkeit. Dies ist im
Allgemeinen bei Kassen, Fahrkartenschaltern, etc. der Fall. Davon zu unterscheiden
sind Systeme mit unvollkommener Erreichbarkeit, bei denen die eintreffenden
Kunden nach bestimmten Kriterien in „Kundengruppen“ unterteilt werden und jede dieser Kundengruppen ihre eigenen Bedienstationen hat. (Bsp.: Kasse im Supermarkt für Kunden mit geringer Anzahl von Artikeln, Frauenparkplätze im Parkhaus,
Klassifikation nach Buchstaben im Studentensekretariat)
In bestimmten technisch-ökonomischen Wartesystemen sind die Bedienstationen
nach der Beendigung einer Bedienung nicht sofort wieder „servicebereit“ (Pause,
Umrüstung, Reparatur). D. h. die Zahl m ist abhängig von t, und die Bedienstationen haben die möglichen Zustände „besetzt“, „frei“ oder „ausgefallen“.
c) Die „Bedienungsdisziplin“ (engl. queueing discipline), d. h. die Reihenfolge, in
der die Kunden bedient werden.
Das Festlegen einer solchen Disziplin ist immer dann notwendig, wenn Kunden keine
freien Bedienstationen vorfinden. Mit ihr wird entschieden: „Wer ist der nächste
Kunde aus der Warteschlange, der bedient wird?“
• Die Mehrheit der Systeme arbeitet nach der FIFO-Disziplin/FCFS Disziplin
(First-In-First-Out /First-Come-First-Serve))
• Manchmal jedoch auch – etwa in Produktionssystemen mit Zwischenlagern,
wo Teile auf Bearbeitung warten – nach dem Last-In-First-Out-Prinzip (LIFODisziplin).
• In einer weiteren Klasse von technisch-ökonomischen Wartesystemen arbeiten
die Bedienstationen nach Prioritätsregeln (PRI-Disziplin). Die Kunden bestehen dabei aus „Teil-Kundengruppen“ K1 , K2 , ..., Kp , die untereinander einen
Vorrang genießen. Kundengruppe K1 wird vor allen anderen bedient, und Kunden aus Ki+1 werden nur dann bedient, wenn sich keine Kunden aus Ki in der
Warteschlange befinden (z. B. Behandlung von Unfällen in Krankenhäusern,
kürzeste Bedienzeit zuerst).
• Ebenso ist eine zufällige Auswahl der wartenden Kunden für die einzelnen Bedienstationen möglich. Eine solche SIRO-Disziplin (Service-In-Random-Order)
bei der Auswahl des nächsten Kunden für die Bediennung sieht man beispielsweise bei Verarbeitung von Kleinteilen in der Fertigung oder auch innerhalb
eines Kollektivs von Versicherungsnehmern bei einer Lebensversicherung.
(iii) Die Kapazität K des Systems
Die Systemkapazität K ist die maximale Anzahl von Kunden, die gleichzeitig in der
Warteschlange zugelassen sind. Diese kann endlich oder unendlich sein. Im Falle K < ∞
wird ein Kunde aus dem technisch-ökonomischen Wartesystem abgewiesen, falls bei seiner
Ankunft die Warteschlange die Länge K hat. Man spricht in einem solchen Fall häufig
von einem Warte-Verlust-System. Der Spezialfall K = 0 trifft etwa in einem Telefonnetz
zu, wenn alle Verbindungsleitungen besetzt sind.
5
1 Einführung
OR II c, Master-Modul IV
In der Literatur hat sich für die Darstellung der organisatorischen Struktur eines technischökonomischen Wartesystems die sogenannte Kendall’sche Notation durchgesetzt, in der für
jedes konkrete Wartesystem die charakteristischen Größen (in einem Fünf-Tupel) zusammengefasst werden.
Kendall’sche Notation: τ /S/m/K/Disziplin
Die angesprochenen Komponenten für eine Charakterisierung der technisch-ökonomischen Wartesysteme beschreiben also im Wesentlichen die organisatorische Struktur der Systeme.
Die Zielsetzung, die wir verfolgen wollen, besteht darin, aus dieser Charakterisierung für konkrete, gegebene technisch-ökonomische Wartesysteme ökonomische Bewertungen zur Einschätzung dieser speziellen organisatorischen Struktur des Systems zu gewinnen (sog. measures of
performance). Solche Bewertungen wird man gewinnen können, wenn man bestimmte Vergleichsgrößen ermittelt, die Aussagen darüber erlauben, dass ein Wartesystem „besser arbeitet“ als ein anderes. Erst auf diese Weise erhält man als Entscheider eines Unternehmens die
Möglichkeit, Empfehlungen zu einer rationalen Gestaltung von technisch-ökonomischen Wartesystemen zu geben, etwa hinsichtlich:
• einer sinnvollen Dimensionierung des technisch-ökonomischen Wartesystems.
• einer effizienten Ausnutzung bzw. Steuerung des technisch-ökonomischen Wartesystems.
Beispiel 1.3
a) Supermarkt: Um wieviel muss die durchschnittliche Bedienzeit verringert werden, damit
pro Zeiteinheit durchschnittlich mindestens 10 Kunden abgefertigt werden? oder
Wann und für wie lange sollte eine zusätzliche Kasse geöffnet werden, damit die maximale
Wartezeit eines Kunden mindestens 2, höchstens aber 4 Minuten beträgt?
b) Dimensionierung eines Parkhauses: Wie viel Parkplätze sollten beim Bau eines Parkhauses für ein Einklaufszentrum vorgesehen werden, damit durchschnittlich mindeseten 80
% der ankommenden Autos einen freien Platz vorfinden können? Wieviele dieser Parkplätze sollen als „Behindertenparkplätze“ ausgewiesen werden, damit mindestens 90%
der ankommenden Autofahrer, die behindert sind, einen freien Parkplatz vorfinden?
c) Hotlines: Das Call-Center einer Hotline eines Mobilfunkanbieters klassifiziert ankommende Kundenanrufe nach deren Inhalten (etwa: Fragen zur Rechnung, Neuanmeldungen,
Technische Unterstützung). Ist für jeden dieser Kundenbereiche genügend Personal vorhanden, damit ein Anrufer im Mittel höchstens 3 Minuten, bei den „Neuanmeldungen“
höchstens 30 Sekunden, warten muss?
d) Bearbeitung von Steuererklärungen im Finanzamt: Wie hoch ist die durchschnittliche
Zeit, die zwischen Abgabe der Steuererklärung und Erteilung des Steuerbescheides vergeht. Sollten zwei zusätzliche Mitarbeiter für die Bearbeitung der Steuererklärungen eingestellt werden? Wie reduziert sich dadurch die Bearbeitungszeit“? Sollte das Finanzamt
den eingehenden Anträge Prioritäten zuweisen?
6
1 Einführung
OR II c, Master-Modul IV
e) Check-in an Flughäfen: Wegen der aktuellen Terrorwarnungen wurde die durchschnittliche Zeit für den Check- in und für die Sicherheitsüberprüfung jeweils verdoppelt. Reicht
die bisherige Empfehlung an die Kunden, spätestens zwei Stunden vor Abflug am Flughafen Ckeck-in einzutreffen noch aus?
f) Kreisverkehr: Der Autoverkehr aus 4 verschiedenen Richtungen passiert eine Strassenkreuzung. Derzeit wird der verkerh durch eine Ampelanlage gesteuert. Aus Umweltgründen sollen die ampelbedingten Halte vermieden werden. Daher soll die Kreuzung zu einem
Kreisverkehr umgebaut werden. Wie gross muss der „Radius“ des Kreisels im Kreisverkehr sein, damit der Verkehr tatsächlich „flüssig“ läuft?
Die Beantwortung von Entscheidungsfragen derartigen Typs lassen sich häufig aufgrund von
quantitativen Größen, welche aus den Charakteristika des im jeweilig konkreten Fall vorliegenden technisch-ökonomischen Wartesystems hervorgehen, durchführen.
Die Beantwortung von Entscheidungsfragen derartigen Typs lassen sich häufig aufgrund von
quantitativen Größen, welche aus den Charakteristika des im konkreten Fall vorliegenden technisch-ökonomischen Wartesystems hervorgehen, durchführen.
Solche interessierenden Größen könnten beispielsweise sein:
T1 , T2 , T3 , . . . , Ti , . . .
Ankunftszeit des i-ten Kunden, i = 1, 2, . . .
S 1 , S 2 , . . . , Si , . . .
Bedienungsdauer des i-ten Kunden, i = 1, 2, . . .
E(S)
Durchschnittliche Bedienungsdauer der Kunden
ϑ 1 , ϑ 2 , . . . , ϑi , . . .
Austrittszeitpunkt des i-ten Kunden aus dem System,
i = 1, 2, . . .
W 1 , W 2 , . . . , Wi , . . .
Wartezeit des i-ten Kunden, bis Bedienung erfolgt,
i = 1, 2, . . .
E(W )
durchschnittliche Wartezeit der Kunden
V1 , V2 , . . . , Vi , . . .
Verweildauer des i-ten Kunden im technisch-ökonomischen
Wartesystem, i = 1, 2, . . .
E(V )
durchschnittliche Verweildauer der Kunden im Wartesystem
Ut
Arbeitsvorrat der Bedienstationen, also die notwendige Zeit
bis zur Abfertigung aller Kunden, welche sich zum Zeitpunkt t im Wartesystem befinden, t ∈ [0, ∞[
αt
Anzahl aller bis zum Zeitpunkt t angekommenen Kunden,
t ∈ [0, ∞[
δt
Anzahl aller bis zum Zeitpunkt t abgefertigten Kunden, t ∈
[0, ∞[
Lt
Anzahl der sich zum Zeitpunkt t im System befindenden
Kunden, t ∈ [0, ∞[
7
1 Einführung
OR II c, Master-Modul IV
E(L)
durchschnittliche Anzahl der Kunden im Wartesystem
pj
relativer zeitlicher Anteil, in dem sich j Kunden im System
befinden (j = 0, 1, 2, . . . ,).
rj
relativer Anteil der neu ankommenden Kunden, die j Kunden im System vorfinden (j = 0, 1, 2, . . . ,).
Nt
Zahl der wartenden Kunden zum Zeitpunkt t, t ∈ [0, ∞[
E(N )
durchschnittliche Anzahl der wartenden Kunden
Y 1 , Y 2 , Y 3 , . . . , Yj , . . .
Länge der Perioden, in denen die Bedienungsstation unproduktiv ist
Abbildung 1.4 auf Seite 9 stellt für ein Beispiel die Zusammenhänge derartiger Grössen einmal
dar.
Da wir im Weiteren formale (d. h. mathematische) Modelle bestimmter technisch-ökonomischer
Wartesysteme aufstellen wollen, um notwendige Größen für eine ökonomische Bewertung zu
ermitteln, müssen wir in die Lage versetzt werden, die Charakteristika der Systeme analytisch
zu beschreiben. Dies geschieht zunächst durch eine entsprechende Beschreibung des Ankunftsmusters (d. h. der Zwischenankunftszeiten τ ) und der Bedienzeit S.
Nun ist das Ankunftsmuster der Kunden im Allgemeinen eine zufällige Größe, d. h. die einzelnen
Kunden treffen zu zufälligen Zeitpunkten Ti , i = 1, 2, . . . im Wartesystem ein. Die Anzahl αt der
in einem Zeitintervall [0, t] ankommenden Kunden ist also ebenfalls zufällig und in Abhängigkeit
von t ein sogenannter stochastischer Prozess. Ebenso sind etwa die Bedienzeiten der einzelnen
Kunden Si , i = 1, 2, . . . zufällige Größen.
Also: Zufälligkeit ist ein wesentlicher Aspekt bei der Analyse technisch-ökonomischer Wartesysteme. Es ist deshalb notwendig, dass wir eine Reihe von Grundbegriffen und Sachverhalten aus
dem Bereich der Wahrscheinlichkeitstheorie bzw. Statistik wiederholen bzw. bereitstellen.
8
1 Einführung
OR II c, Master-Modul IV
¿1
Kundenankunfte
Ä
T0=0
¿2
¿4
¿3
T3
T2
T1
¿5
¿6
T5
T4
T6
t
U(t)
Arbeitsvorrat
im System
S2
S1
W1=0
S6
S5
W4
W3
W2
T0=0
Kundenaustritte
S4
S3
#1
#2
W5=0
W6
#3 #4
#5 #6
T0=0
t
t
®(t)
±(t)
akkumulierte
Ä
Ankunfte
und
Austritte
T0=0
T1
T3
T2
T5
T4
T6
t
L(t)
Z1
Y1
Z2
Y2
Zahl der
Kunden im
System
T0=0
T1
T2
#1
T3
T4 #2
#3 #4 T5
Abbildung 1.4: Wartesystem mit m = 1, K = ∞
9
T6
#5 #6
t
2 Eine kurze Wiederholung zur
Wahrscheinlichkeitstheorie
In diesem kleinen Kapitel sind eine Reihe von Sachverhalten aus dem Bereich der Statistik
bzw. der Wahrscheinlichkeitstheorie überblicksmässig zusammengestellt. Diese Zusammenstellung ersetzt natürlich nicht die (für das weitere Verständnis vorausgesetzten !) Kenntnisse einer
Einführungsveranstaltung aus dem Bereich der Statistik. Für eine umfangreichere Wiederholung sei hier das Buch [13] (ggf. zum Eigenstudium) empfohlen.
2.1 Begrifflichkeiten
Die Wahrscheinlichkeitstheorie beschäftigt sich mit der Bereitstellung von Methoden zur Beschreibung und Analyse von Experimenten mit zufälligem Ausgang. Man interessiert sich hierbei unter anderem für die Beobachtung von „Ereignissen“ bzw. von „Zufallsgrößen“ und deren
Wahrscheinlichkeiten.
Definition 2.1
Als Zufallsexperiment bezeichnet man einen zufälligen Versuch, wenn dessen Ausgang unter
den gegebenen Versuchsbedingungen a priori nicht feststeht und der – zumindest gedanklich –
beliebig oft wiederholt werden kann. Die Menge aller möglichen Versuchsergebnisse nennt man
Zustandsraum, Merkmalsraum oder Ereignissraum Ω.
Definition 2.2
Unter einem zufälligen Ereignis verstehen wir ein Ereignis, das im Rahmen eines Zufallsexperiments eintreten kann, nicht aber eintreten muss. Es wird als Teilmenge des Merkmalsraums
Ω aufgefasst. Die einelementigen Teilmengen von Ω nennt man Elementarereignisse ω. Sie
repräsentieren die möglichen Versuchsergebnisse des Experiments.
Für zwei Ereignisse A und B repräsentiert
• Ac das sog. komplementäre Ereignis zu A,
• A ∪ B das Ereignis, dass mindestens eines der beiden Ereignisse A oder B eintritt,
• A ∩ B das Ereignis, dass sowohl das Ereignis A als auch das Ereignis B eintritt,
• A \ B das Ereignis, dass zwar das Ereignis A, nicht aber das Ereignis B eintritt,
10
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
• Ω das sichere Ereignis und
• ∅ das unmögliche Ereignis.
Die Wahrscheinlichkeitstheorie bezeichnet eine Menge von Teilmengen von Ω als sog. σ-Algebra
A, wenn folgende Bedingungen erfüllt sind:
(i) Ω ∈ A
(ii) A ∈ A ⇒ Ac ∈ A
(iii) Für eine abzählbare Familie (Ai )i∈I von Mengen von A gilt
S
i∈I
Ai ∈ A.
Ein Ereignis A entspricht demnach einem Element der σ-Algebra A, d. h. A ∈ A.
Beispiel 2.3
Die Menge aller möglichen Teilmengen von Ω, die sog. Potenzmenge P(Ω) von Ω, ist stets eine
σ-Algebra.
Grundlage für alle weiteren Betrachtungen in der Wahrscheinlichkeitstheorie bildet ein sog.
Wahrscheinlichkeitsraum (Ω, A, P ). Dabei ist Ω eine beliebige Menge (Merkmalsraum), A eine
σ-Algebra in Ω und P ein auf der σ-Algebra A definiertes Wahrscheinlichkeitsmaß, also eine
Abbildung P : A → [0, 1] mit den folgenden Eigenschaften:
(i) P (Ω) = 1
(ii) P (A) ≥ 0 für alle A ∈ A
S
P
(iii) P ( i Ai ) = i P (Ai ) für jede abzählbare Familie von paarweise disjunkten Ereignissen
A1 , A2 , . . . ∈ A.
Beispiel 2.4
Bei in der Praxis vorkommenden Problemen hat man es manchmal mit sog. Laplace-Experimenten
zu tun. Es handelt sich um Zufallsexperimente mit nur endlich vielen möglichen „elementaren
Ereignissen“, deren jeweiliger Eintritt als gleichwahrscheinlich angenommen wird. Das zugehörige mathematische Modell ist ein Wahrscheinlichkeitsraum (Ω, A, P ), der sog. Laplace’scher
Wahrscheinlichkeitsraum, mit einer endlichen (n-elementigen) Menge Ω, A = P(Ω) und P als
Wahrscheinlichkeitsmaß mit P ({ω}) = 1/n. Mittels einfacher Überlegungen erhält man die
Wahrscheinlichkeiten für ein beliebiges Ereigniss A ∈ A als
P (A) =
1
· |A|.
n
2.2 Unabhängigkeit und bedingte Wahrscheinlichkeit
Es sein (Ω, A, P ) ein Wahrscheinlichkeitsraum und A, B ∈ A zwei Ereignisse mit P (B) > 0.
Interessiert man sich für die Wahrscheinlichkeit des Eintritts von A unter der Bedingung,
dass das Ereignis B eintritt, bzw. schon eingetreten ist, hat man mit den sog. bedingten
Wahrscheinlichkeiten zu tun.
11
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
Definition 2.5
Die bedingte Wahrscheinlichkeit P (A|B) des Eintritts von A unter der Bedingung, dass
das Ereignis B eintritt bzw. eingetreten ist, wird durch
P (A|B) :=
P (A ∩ B)
P (B)
definiert.
Bemerkung 2.6
Mit der Zuordnung
P (A ∩ B)
P (B)
A 7→
wird ein Wahrscheinlichkeitsmaß PB (·) auf A definiert. Offenbar gilt PB (B) = 1. Durch den
Übergang von P zu PB ist B zu einem Ereignis mit Wahrscheinlichkeit 1 geworden. Für jedes
A ∈ A bezeichnet man daher PB (A) als die bedingte Wahrscheinlichkeit unter (der Hypothese)
B und schreibt PB (A) für P (A|B).
Verallgemeinernd führt die Definition der bedingten Wahrscheinlichkeit auf die Formel der
totalen Wahrscheinlichkeit: Es sei (Ω, A, P ) ein Wahrscheinlichkeitsraum. Sei weiterhin eine
endliche oder abzählbar unendliche Familie (Bi )i∈I gegeben mit paarweise disjunkten EreigS
nissen Bi ∈ A, P (Bi ) > 0 für alle i ∈ I und i Bi = Ω („Zerlegung von Ω“). Dann gilt für
jedes Ereignis A ∈ A
P (A) =
X
i∈I
P (A|Bi ) · P (Bi ).
(2.1)
Speziell ergibt sich wegen Ω = B ∪ B c :
P (A) = P (A|B) · P (B) + P (A|B c ) · P (B c ).
Aus der Formel von der totalen Wahrscheinlichkeit ergibt sich unter der Annahme, dass P (A) >
0 die der Satz von Bayes 1 :
und wiederum speziell
P (B|A) =
P (Bk |A) = P
P (A|Bk ) · P (Bk )
,
i∈I P (A|Bi ) · P (Bi )
P (A|B) · P (B)
P (A|B) · P (B)
=
.
P (A)
P (A|B) · P (B) + P (A|B c ) · P (B c )
Aufgabe(siehe Übungsblatt 1): Wie jedes Jahr im Semester wird auch diesmal das Blutspendemobil des Roten Kreuzes wieder Station auf dem Martin-Schmeißer-Platz machen. Das
1
Benannt nach dem engl. Mathematiker Th. Bayes, geb. 1702 gest. 1761.
12
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
dort gespendete Blut wird untersucht, unter anderem auch auf das Vorkommen von HIV. Das
Testverfahren des hiesigen Blutlabors habe eine Genauigkeit von 99 % und einer von 1 000
Studenten Ihrer Altersgruppe sei HIV-positiv. Außerdem betrage die Rate für falsch positiv
erkannte HIV-Infektionen 5 %. Angenommen, die Analyse eines Testes fällt HIV-positiv aus.
Mit welcher Wahrscheinlichkeit ist die untersuchte Person wirklich HIV-positiv? Hinweis: Die
angegebenen 99 % beziehen sich auf die Wahrscheinlichkeit P(Test ist positiv|Person ist HIVpositiv). Gesucht ist die Wahrscheinlichkeit P (Person ist HIV-positiv|Test ist positiv).
Gilt in der Gleichung der bedingten Wahrscheinlichkeit, dass P (A|B) = P (A), so hängt die
Wahrscheinlichkeit für das Ereignis A nicht vom Eintritt des Ereignisses B ab.
Definition 2.7
Zwei Ereignisse A und B heißen (stochastisch) unabhängig, wenn gilt P (A ∩ B) = P (A) ·
P (B). Eine (möglicherweise unendliche) Familie von Ereignissen (Ai )i∈I heißt unabhängig,
wenn für jede endliche Teilmenge J ⊂ I
P(
\
Ai ) =
Y
P (Ai )
i∈J
i∈J
gilt.
Bemerkung 2.8
Aus der Unabhängigkeit der (Ai )i∈I folgt die paarweise Unabhängigkeit je zweier Ereignisse Ai
und Aj mit i, j ∈ I und i 6= j. Die Umkehrung gilt jedoch nicht!
2.3 Zufallsvariablen und Verteilungen
Bei einem Zufallsexperiment interessiert man sich häufig nicht direkt für den Ausgang des
Experiments, sondern für mit dem Ausgang verbundenen Werte, also quantitativen Grössen
Definition 2.9
Es sei (Ω, A, P ) ein Wahrscheinlichkeitsraum. Eine (A-messbare) Abbildung X : Ω → R heißt
(reelle) Zufallsvariable.
Bemerkung 2.10
Die Abbildung X ordnet damit jedem Elementarereignis ω ∈ Ω eines zufälligen Versuchs eine
reelle Zahl x = X(ω) zu. Man nennt x ∈ R eine Realisierung von X. Wegen der Messbarkeit
gilt für jede (Borelsche) Menge B ⊂ R, dass deren Urbildmenge X −1 (B) in A liegt, also ein
Ereignis ist. Für derartige Mengen B ⊂ R setzt man
{X ∈ B} := {ω ∈ Ω | X(ω) ∈ B} = X −1 (B)
13
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
und definiert
PX (B) := P ({X ∈ B}) = P (X −1 (B)).
Man bezeichnet {X ∈ B ∈ B} als das Ereignis „X liegt in B“ und PX (B) als die Wahrscheinlichkeit dieses Ereignisses. Man spricht auch oft von dem durch P induzierten Bildmaß auf
(R, B) bzw. der Verteilung der Zufallsvariablen X. .
Bemerkung 2.11
Wie schon erwähnt, entspricht der Verteilung von X das Bildmaß X(P ) =: PX . Mit Hilfe
der Verteilung PX können somit die Wahrscheinlichkeiten P (X ∈ B) berechnet werden. Von
besonderer Bedeutung ist hierbei, dass der im Allgemeinen „komplizierte“ und das zufällige
Geschehen beschreibende Wahrscheinlichkeitsraum (Ω, A, P ) nicht explizit bekannt sein muss.
Die Verteilung einer Zufallsvariablen X ist vollständig bestimmt, wenn man für jede Zahl x ∈ R
den Wert FX (x) := P (X ∈] − ∞, x]) = P (X ≤ x) = P ({ω ∈ Ω | X(ω) ≤ x}) kennt.
Definition 2.12
Es sei X eine reelle Zufallsvariable. Dann heißt die Funktion FX : R → R mit
FX (x) := PX (x ≤ x)
die Verteilungsfunktion von X.
In der Praxis unterscheiden wir üblicherwiese zwei Arten von Zufallsvariablen
Definition 2.13
Eine reelle Zufallsvariable X : Ω → R heißt diskret verteilt (kurz: diskret), falls sie nur Werte aus einer abzählbaren Menge M ⊂ R annehmen kann (d. h. X(ω) ∈ M = {xk |k ∈ I, I ⊂ N}.
Man nennt pk := P (X = xk ) = P ({ω ∈ Ω | X(ω) = xk }) häufig die „Einzelwahrscheinlichkeit“ von X. Manchmal spricht man hier auch von der diskreten Dichte-Funktion.
Für diskrete Zufallsvariablen ist die Verteilung von X durch die Dichtefunktion vollständig
bestimmt. Die Werte der Verteilungsfunktion FX lassen sich nämlich für jedes x ∈ R über
FX (x) =
X
pk
{k|xk ≤x}
bestimmen.
Beispiele für das Vorkommen diskrete Zufallsvariablen in technisch-ökonomischen Wartesystemen sind:
• Länge der Warteschlange (zu einem Zeitpunkt t),
• Anzahl der abgewiesenen Kunden (bis zu einem Zeitpunkt t),
14
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
• Anzahl der abgefertigten Kunden (bis zu einem Zeitpunkt t),
• Anzahl der ankommenden Kunden (bis zu einen Zeitpunkt t).
Definition 2.14
Der Erwartungswert E(X) einer diskreten Zufallsvariablen X wird definiert als
E(X) :=
X
k∈I
sofern
P
k
xk · pk ,
|xk · pk | < ∞.
Der Erwartungswert der Zufallsvariable X kann dabei als der Sachverhalt interpretiert werden,
dass bei „genügend häufiger“ Durchführung des Zufallsexperiments der mit den pk gewichtete
Durchschnitt der beobachteten Werte von X „in der Nähe“ von E(X) liegt .
Als ein praktisches Maß für die Größe der Abweichungen der Realisierungen wird üblicherweise
die Varianz herangezogen.
Definition 2.15
Unter der Varianz V ar(X) einer diskreten reellen Zufallsvariablen X wird definiert als
V ar(X) :=
X
k∈I
sofern
P
k
(xk − E(X))2 · pk
x2k · pk < ∞.
Die Grösse
p
V ar(X) wird als Standardabweichung
√ oder Streuung von X bezeichnet.
V ar(X)
Falls E(X) 6= 0, dann heisst die Grösse cX := E(X) der Variationskoeffizient von X. Der
Variationskoeffizient ist eine dimensionslose Grösse, die die Standardabweichung durch den
Erwartungswert „relativiert“ wird. Ist die Standardabweichung größer als der der Erwartungswert, so ist der Variationskoeffizient offenbar größer 1, im entgegengesetzten fall kleiner 1.
Beispiel 2.16
(i) Binomialverteilung: Gegeben seien zwei Parameter p, 0 < p < 1 und n ∈ N sowie
eine diskrete Zufallsvariable X : Ω → {0, . . . , n}. Dan heisst X binomial-verteilt mit
Parametern n und p, kurz: X ∼ B(n, p) falls die Wahrscheinlichkeitsverteilung von X
durch
!
n k
P (X = k) =
p (1 − p)n−k , k = 0, 1, . . . , n,
k
gegeben ist. Für eine mit den Parametern n und p binomial-verteilte Zufallsvariable X
gilt
1−p
.
E(X) = n · p,
V ar(X) = n · p · (1 − p),
c2X =
n·p
15
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
Die Dichte und die Verteilungsfunktion der Binomialverteilung ist in Abb. 2.1 dargestellt.
Verwendung: Tritt als Folge eines Zufallsexperiments ein bestimmtes Ereignis A mit
Wahrscheinlichkeit 0 < p < 1 auf, und wird das Experiment n-mal unabhängig voneinander wiederholt, dann lässt sich die „Anzahl k des Auftretens des Ereignisses A in
diesem n Experimenten“ (offenbar ist 0 ≤ k ≤ n) durch eine eine Zufallsvariable X
darstellen, die der Binomialverteilung mit den Parametern p und n folgt.
0.5
1
0.4
0.8
0.3
0.6
0.2
0.4
0.1
0.2
0
0
0
5
10
15
0
5
10
15
Abbildung 2.1: Dichte und Verteilungsfunktion von B(15, 0.5)
Hat man zwei Zufallsvariablen X und Y , wobei X ∼ B(n1 , p) und Y ∼ B(n2 , p) (der
Parameter p ist also bei beiden derselbe), so gilt für die Zufallsvariable Z = X + Y :
Z ∼ B(n1 + n2 , p).
(ii) Geometrische Verteilung: Es sei 0 < p < 1. Eine diskrete Zufallsvariable X : Ω →
{0, 1, . . .} = N0 heisst geometrisch -verteilt mit Parameter p (kurz: X ∼ G(p)), falls
pk = P (X = k) = p · (1 − p)k−1 .
Für die Verteilungsfunktion von FX ergibt sich:
FX (n) = P (X ≤ n) = 1 − P (X > n) = 1 − (1 − p)n ,
Erwartungswert, Varianz und Variationskoeffizient errechnen sich als
1
E(X) = ,
p
V ar(X) =
1−p
,
p2
c2X =
1
.
p
Anwendung: geometrisch-verteilte Zufallsvariable werden typischerweise für die Beschreibung des
„Wartens auf den ersten Erfolg“
benutzt. Es sei A ein Ereignis, welches innerhalb eines Experimentes mit Wahrscheinlichkeit p eintritt („Erfolgswahrscheinlichkeit“). Die Zufallsvariable X beschreibe die Anzahl
der (unabhängigen) Versuche im Experiment, die durchgeführt werden, bis zum ersten
mal A eintritt. Dann wird die Wahrscheinlichkeit, dass dies genau im k-ten Versuch
geschieht durch p · (1 − p)k−1 beschrieben, d.h. X ∼ G(p).
16
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
1
0.25
0.2
0.8
0.15
0.6
0.1
0.4
0.05
0.2
0
−0.05
0
0
10
20
30
0
10
20
30
Abbildung 2.2: Dichte und Verteilungsfunktion von P o(6)
Satz 2.17
Eine diskrete Zufallsvariable X : Ω → {0, 1, 2, . . .} ist geometrisch-verteilt genau dann,
wenn sie folgender Bedingung („Gedächtnislosigkeit“) genügt:
P (X = n + k | X > n) = P (X = k) für alle
n, k ≥ 1.
(iii) Poisson-Verteilung 2 : Es sei λ > 0. Eine diskrete Zufallsvariable X : Ω → {0, 1, . . .}
heisst Poisson-verteilt mit Parameter λ (kurz: X ∼ P o(λ)), falls
pk = P (X = k) =
λk −λ
e .
k!
Für den Erwartungswert, Varianz und Variationskoeffizient rechnet man aus:
E(X) = λ,
V ar(X) = λ,
c2X =
1
.
λ
Abb. 2.2 auf Seite 17 zeigt die Dichte und Verteilungsfunktion der Poisson-Verteilung.
Anwendung: Poisson-verteilte Zufallsvariable werden typischerweise für eine
Beschreibung von „Zähl-Ereignissen“ innerhalb eines bestimmten festgelegten
Zeitintervalls
benutzt. Sind innerhalb dieses Zeitintervalls die Auftritte dieses Ereignisses unabhängig
voneinander und tritt es dort durchschnittlich λ-mal auf, so ist die Wahrscheinlichkeit,
k
dass das Ereignis während dieser Zeit k-mal auftritt gerade λk! e−λ .
Im Zusammenhang mit technisch-ökonomischen Wartesystemen werden typischerweise
„Ankunft eines Kunden (im Intervall [0, t])“ oder „Verlassen eines Kunden (im Intervall
[0, t])“ als solche angesehen und und das „Zählen“ des Auftretens durch Poisson-verteilte
Zufallsvariable beschrieben.
Wichtig ist auch noch der folgende Sachverhalt
2
Benannt nach dem frz. Mathematiker S.D. Poisson, geb. 1781 gest. 1840.
17
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
Satz 2.18
Es seien X1 ∼ P o(λ1 ) und X2 ∼ P o(λ2 ).
Dann ist die Zufallsvariable Z = X1 + X2 Poisson-verteilt mit Parameter λ1 + λ2 . Also
X1 + X2 ∼ P o(λ1 + λ2 ).
Beweis: Als Übungsaufgabe
Die Summe zweier Poisson-verteilter Zufallsvariablen ist also ebenfalls Poisson-verteilt
und die Parameter addieren sich.
Definition 2.19
Eine Zufallsvariable X : Ω → R heißt stetig verteilt (oder kurz: stetig), falls es eine integrierbare Funktion f : R → R+ gibt, derart, dass für die Verteilungsfunktion FX gilt
FX (x) =
Z
x
f (s)ds.
−∞
In einem solchen Fall heißt f die Wahrscheinlichkeitsdichte oder Dichte der Zufallsvariablen X.
Bemerkung 2.20
Im diskreten Fall entspricht der Wahrscheinlichkeitsdichte der diskrete Funktion f : R → R+
P
P
mit f (xk ) = pk . Es gilt weiterhin, dass k pk = k f (xk ) = 1. Im stetigen Fall gilt wegen
1 = P (Ω) = P (X ∈ R) = lim FX (x) = lim
x→∞
für die Dichte der Zufallsvariablen X, dass
Z
x
x→∞ −∞
R∞
−∞ f (s)ds
f (s)ds
= 1.
Definition 2.21
Der Erwartungswert E(X) bzw. die Varianz V ar(X) einer stetigen reellen Zufallsvariablen
wird definiert als
E(X) :=
V ar(X) :=
Z
∞
−∞
Z ∞
−∞
s · f (s)ds
(s − E(X))2 · f (s)ds
sofern die jeweiligen Integrale existieren.
Auch für stetige Zufallszahlen versteht man unter
p
V ar(X) die
√ Standardabweichung oder
V ar(X)
Streuung von X. Falls E(X) =
6 0, dann heisst die Grösse cX := E(X) auch hier der Variationskoeffizient von X.
Beispiele für stetige Zufallsvariablen in technisch-ökonomischen Wartesystemen sind:
18
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
• Zwischenankunftszeit τi des i-ten Kunden,
• Bedienzeit Si des i-ten Kunden,
• zeitlicher Arbeitsvorrat Ut einer Bedienstation,
• Betriebszeiten Zk der Bedienstation,
• Leerlaufzeiten Yk der Bedienstation.
Beispiel 2.22
(i) Stetige Gleichverteilung (Rechteckverteilung): Es sei eine stetige reelle Zufallsvariable
X : Ω → [a, b] ⊂ R gegeben. Man nennt X gleichverteilt auf dem Intervall [a, b], kurz
X ∼ U (a, b), falls für die Dichtefunktion gilt, dass
f (x) =
1
, a≤x≤b
b−a
0,
sonst.
Die Dichte einer gleichverteilten Zufallsvariablen ist also auf dem Intervall [a, b] konstant.
Für den Erwartungswert und die Varianz einer gleichverteilten Zufallsvariable rechnet
man aus:
(b − a)2
a+b
und V ar(X) =
.
E(X) =
2
12
Anwendung: Gleichverteilte Zufallsvariable sind grundlegend für den Bereich der „Simulationsverfahren“ (siehe späteres Kapitel ??). Im Rahmen einer solchen Simulation wird
dann gefordert dass zu generierenden „Zufallszahlen“ einer bestimmten Verteilung gehorchen sollen. Diese Verteilung erhält man durch Transformation von Zufallszahlen, die
auf dem Einheitsintervall [0, 1] gleichverteilt sind (X ∼ U (a, b)).
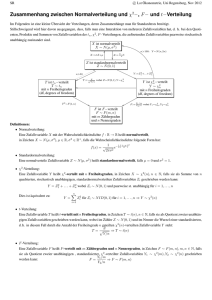
(ii) Gauß’sche Normalverteilung: Es sei µ ∈ R und σ 2 > 0„Eine stetige Zufallsvariable
X : Ω → R heisst normal-verteilt mit Parametern µ und σ 2 (kurz: X ∼ N (µ, σ 2 )), falls
X die Dichtefunktion
1
2
2
f (x) = √
e−(x−µ) /2σ
2πσ
besitzt. Für den Erwartungswert bzw Varianz erhält man
E(X) = µ
und V ar(X) = σ 2 .
Für den Spezialfall µ = 0 und σ 2 = 1 heisst X ∼ N (0, 1) standard-normalverteilt. Abb.
2.3 zeigt die als Gauß’sche Glockenkurve bekannte Dichte und die Verteilungsfunktion
der Normalverteilung graphisch.
Die Normalverteilung stellt eine äusserst wichtige Verteilung dar. Ihre Bedeutung erhält
sie durch den Zentralen Grenzwertsatz, der besagt, dass die Summe unabhängiger und
identisch verteilter Zufallsvariablen beliebiger Verteilungen annähernd normal-verteilt
sind (Konvergenz in Verteilung gegen eine normal-verteilte Zufallsvariable).
Anwendung: Die Normalverteilung tritt häufig im Zusammenhang mit der Beschreibung
von zufälligen Meßfehlern und Fabrikationsfehlern auf.
19
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
0.5
1
0.4
0.8
0.3
0.6
0.2
0.4
0.1
0.2
0
0
−2
0
2
−2
0
2
Abbildung 2.3: Dichte und Verteilungsfunktion von N (0, 1)
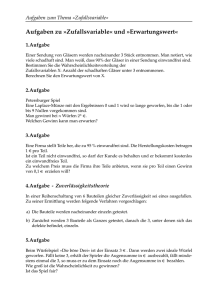
(iii) Exponentialverteilung: Es sei λ > 0. Eine stetige Zufallsvariable X : Ω → [0, ∞[ heisst
exponential-verteilt mit Parameter λ (kurz: X ∼ E(λ), falls X die Dichte
f (x) =
(
0,
x<0
−λx
λ·e
, x≥0
besitzt. Für die Verteilungsfunktion von FX gilt dann für t > 0:
FX (t) = P (X ≤ t) = 1 − P (X > t) = 1 − e−λt ,
d.h.
P (X > t) = 1 − FX (t) = e−λt .
Für den Erwartungswert, die Varianz bzw. den Variationskoeffizienten erhält man
E(X) = 1/λ,
V ar(X) = 1/λ2 ,
cX = 1.
Die Dichte und die Verteilungsfunktion der Exponentialverteilung ist in Abb. 2.4 graphisch dargestellt.
2.5
1
2
0.8
1.5
0.6
1
0.4
0.5
0.2
0
0
0
2
4
0
2
4
Abbildung 2.4: Dichte und Verteilungsfunktion von E(2)
Anwendung: Die Exponentialverteilung gehört zu den wichtigen und häufig anzutreffenden Verteilungen. Sie wird oft genutzt, um die Lebensdauer von Objekten zu modellieren,
die „nicht altern“, also immer „wie neu“ sind. Dies wird bspw. oft von elektronischen
Bauteilen angenommen. Auch zur Beschreibung von Zwischenankunftszeiten bzw. Bedienzeiten wird sie herangezogen. Es gilt nämlich der fundamentale Zusammenhang:
20
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
Satz 2.23
Eine reelle Zufallsvariable X : Ω → [0, ∞[ ist exponential-verteilt genau dann, wenn sie
folgender Bedingung („Gedächtnislosigkeit“) genügt:
P (X > s + t | X > s) = P (X > t) für alle
s, t ≥ 0.
Die zufällige Lebensdauer von Glühbirnen oft mit Hilfe der Exponentialverteilung modelliert. Die damit unterstellt Gedächtnislosigkeit weist darauf hin, dass es nicht viel
Sinn ergibt, eine funktionierende Glühbirne durch eine neue zu ersetzen. Die Eigenschaft
besagt nämlich, dass die Wahrscheinlichkeit dafür, dass eine Glühbirne, die bisher s
Stunden funktionsfähig war, noch t weitere Stunden funktioniert, genauso groß ist wie
die Wahrscheinlichkeit, dass eine neue Glühbirne t Stunden funktioniert. Die Eigenschaft
der Gedächtnislosigkeit einer Exponentialverteilung führt – wie wir noch sehen werden –
zu der sog. „Markov-Eigenschaft“ von Poisson-Prozessen.
Eine weitere wichtige Eigenschaft von exponentialverteilten Zufallsvariablen ist die folgende
Satz 2.24
Es seinen X1 , X2 , . . . , Xk k voneinander stochastisch unabhängige, exponentialverteilte
Zufallsvariablen mit den Parametern λ1 , λ2 , . . . , λk
Dann ist die Zufallsvariable
X = min{X1 , X2 , . . . Xk }
exponentialverteilt mit Parameter λ = λ1 + λ2 + · · · + λk
Beweis: In der Übung als Übungsaufgabe.
(iv) Erlang-Verteilung 3 : Es sein λ > 0 und r ∈ N, r ≥ 2. Eine stetige Zufallsvariable
X : Ω → [0, ∞[ heisst Erlang-verteilt mit Parameter λ und r (kurz: X ∼ Erl(λ, r), falls
X die Dichte
(
0,
x<0
f (x) =
λn ·xr−1
−λx
, x≥0
(r−1)! · e
besitzt.
Als Verteilungsfunktion von FX ergibt sich dann für t > 0:
−λt
FX (t) = P (X ≤ t) = 1 − P (X > t) = 1 − e
d.h.
−λt
P (X > t) = 1 − FX (t) = e
3
·
r−1
X
i=0
·
r−1
X
i=0
(λ · t)i
i!
!
(λ · t)i
i!
!
,
.
Benannt nach dem dänischen Mathematiker und Ingenieur A.K. Erlang, geb. 1878 gest. 1929.
21
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
Für den Erwartungswert, die Varianz bzw. den Variationskoeffizienten erhält man hier
r
,
λ
E(X) =
V ar(X) =
r
,
λ2
c2x =
1
.
r
Anwendung: Erlang-Verteilungen gehören bei der Modellierung von Bedienzeiten ebenfalls zu wichtigen und häufig anzutreffenden Verteilungen. In der Realität besteht ein
„Bedienungsvorgang“ häufig aus mehreren einzelnen (also etwa n ≥ 1) "Bedienungsschritten“. Sind die Dauern Si , i = 1, 2, . . . r dieser einzelnen Bedienungsschritte voneinander
unabhängig und exponential-verteilt mit gleichem Parameter λ, so ist die Dauer S des
gesamten Bedienungvorgangs Erl(λ, r)-verteilt.
2.4 Zusammenstellung von im Weiteren benötigten Sachverhalte
a) Es ist
(i) Reihenentwicklung für die Exponentialfunktion:
ea·x =
∞
X
(a · x)i
i!
i=0
, für alle a, x ∈ R
•
∞
X
xi =
i=0
1
, für |x| < 1
1−x
•
n
X
1 − xn+1
für |x| < 1.
1−x
xi =
i=0
•
∞
X
i=0
i · xi =
x
, für |x| < 1
(1 − x)2
•
∞
X
i=0
i2 · xi =
x · (1 + x)
, für |x| < 1
(1 − x)3
b) Abschätzung von Wahrscheinlichkeiten: Es sei X eine nicht-negative Zufallsvariable, dann gilt für alle t > 0:
P (X ≥ t) ≤
E(X)
t
22
(Markov-Ungleichung).
2 Eine kurze Wiederholung zur Wahrscheinlichkeitstheorie
OR II c, Master-Modul IV
c) Satz vom totalen Erwartungswert
Satz 2.25
Es sei X eine integrierbare Zufallsvariable und (Bi )i∈I eine endliche oder abzählbar unS
endliche Familie von Teilmmengen Bi ⊂ R, P (Bi ) > 0, paarweise disjunkt und i Bi = Ω
(„Zerlegung von R“). Dann gilt
E(X) =
X
i∈I
E(X|Bi ) · P (Bi ).
d) Faltungssatz (siehe etwa [13]):
Satz 2.26 (Faltungssatz)
Es seien X1 und X2 zwei unabhängige Zufallsvariablen mit Dichtefunktionen fX1 bzw.
fX2 . Dann ergibt sich die Dichtefunktion fX der Zufallsvariablen X = X1 + X2 als:
fX (t) = fX1 ∗ fX2 (t) =
Z
+∞
−∞
fX1 (t − s) · fX2 (s)ds.
Der Ausdruck fX1 ∗ fX2 (t) heißt Faltung von fX1 und fX2 .
23
3 Stochastische Prozesse in Wartesystemen,
„Gedächtnislosigkeit“
Die meisten zufälligen Größen in einem technisch-ökonomischen Wartesystem unterliegen zeitlichen Veränderungen. Beispiele hierfür sind:
• Die Anzahl αt von Kunden, die bis zum Zeitpunkt t an einer Bedienstation angekommen
sind.
• Die Anzahl δt von Kunden, die bis zum Zeitpunkt t an einer Bedienstation bedient
worden sind. Diese, vom zufälligen Eintreten der Kunden in das Wartesystem und von
seiner (zufälligen) Bedienzeit abhängige, Zahl ist mit t veränderlich.
• Die Anzahl Bk der am Tag Nr. k insgesamt bearbeiteten Einkommensteuerbescheide in
einem Finanzamt.
Statt einer einzelnen Zufallsvariablen zu einem bestimmten Moment hat man also eine Familie
von Zufallsvariablen, die zu jedem Zeitpunkt (t ≥ 0, oder k ∈ N) bestimmte (zufällige) Werte
annehmen.
Definition 3.1
Es sei T = [0, ∞[ oder T = {0, 1, . . .}. Für jedes t ∈ T sei eine Zufallsvariable Xt : Ω → R
gegeben. Dann nennen wir die Gesamtheit der Zufallsgrößen (Xt )t∈T einen stochastischen
Prozess. Ist T = [0, ∞[, so heißt (Xt )t∈T ein stochastischer Prozess mit stetigem oder kontinuierlichem (Zeit-) Parameter, im Falle T = {0, 1, . . .} ein stochastischer Prozess mit
diskretem (Zeit-) Parameter. Oft spricht man auch salopp von einem stochastischen Prozess mit stetiger (bzw. diskreter) Zeit.
Beispiele für das Auftreten stochastischer Prozesse im Zusammenhang mit technisch-ökonomischen Wartesystemen sind beispielsweise:
(i) mit diskretem (Zeit-)Parameter:
• Zwischenankunftszeit τk := Tk −Tk−1 , k = 1, 2, . . . zwischen Kunde k −1 und Kunde
k
• Bedienzeit des k-ten Kunden, Sk , k = 1, 2, . . .
• Ankunftszeitpunkte des k-ten Kunden, Tk , k = 1, 2, . . .
• Zeitpunkt sk an dem der k-te Kunde das Wartesystem verlässt
24
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
• Dauer bis zum Zeitpunkt, in dem die Warteschlange zum ersten Mal k Kunden lang
ist
(ii) mit stetigem (Zeit-)Parameter:
• Länge der Warteschlange Nt zum Zeitpunkt t
• Anzahl der Kunden Lt , die sich zum Zeitpunkt t im Wartesystem befinden
• Anzahl der abgefertigten Kunden δt bis zum Zeitpunkt t
• Anzahl der zurückgewiesenen Kunden bis zum Zeitpunkt t
• Anzahl der zum Zeitpunkt t eintreffenden Kunden Xt
Um Kenngrössen für das Wartesystem zu ermitteln, wird es also notwendig sein, bestimmte
stochastische Prozesse des Systems zu untersuchen.
Beispiel 3.2 (Stochastische Prozesse an einem Ski-Lift:)
Wir betrachten als Wartesystem einen Ski-Teller-Lift innerhalb eines Skigebietes. Dieser
Teller-Lift befördert die Skifahrer, die bei ihm ankommen, wieder „nach oben“ und zwar
jeweils einen Skifahrer im Abstand von einer Zeiteinheit (z. B. 10 Sek.).
Auf Grund von statistischen Untersuchungen hat man festgestellt, dass ein Anteil von α
(0 < α < 1) aller abfahrenden Skifahrer den Teller-Lift benutzen wollen und der übrige
Anteil der Skifahrer , also (1 − α), an der Teller-Lift-Station vorbei fährt. Diese Information interpretieren wir so, dass mit Wahrscheinlichkeit α das Ereignis „ein abfahrender
Skifahrer hält am Lift und will wieder „nach oben“ befördert werden“ eintritt. Mit Wahrscheinlichkeit (1 − α) fährt er vorbei.
Wir bezeichnen mit {0, 1, . . .} die einzelnen Zeitpunkte, zu denen der Tellerlift bedienen
kann, betrachten die Zeitintervalle zwischen zweier solcher Bedienungen und nummerieren diese durch. Während eines Zeitintervalles [k, k − 1[ kommt also eine vom Zufall
abhängige Anzahl, nämlich Xk , von Skifahrern am Tellerlift an, um bedient zu werden.
Ein ankommender Skifahrer stellt sich, falls er nicht sofort befördert werden kann, in
einer Warteschlange an. Die Beförderungsdisziplin sei zunächst unerheblich. Die Grösse
Xk (also die Anzahl der im Zeitintervall [k − 1, k[ (k = 1, 2, . . .) am Tellerlift ankommenden Skifahrer) ist also eine Zufallsvariable und (Xk )k∈{1,2,...} ein stochastischer Prozess
mit diskreter Zeit.
Nehmen wir nun an, dass diese Zufallsvariablen Xk identisch verteilt (d. h. ihre Verteilung ist unabhängig vom Zeitintervall k immer dieselbe) und voneinander unabhängig
seien (d. h. die Ankünfte der innerhalb zweier verschiedenen Zeitintervalle ankommenden
Kunden seien voneinander unabhängig). Für die Verteilung gelte
pn := P (Xk = n) = (1 − α) · αn ,
n ≥ 0,
0 < α < 1,
d.h. die Zuvallsvariablen Xk sind jeweils gemäss einer geometrischen Verteilung mit Parameter α verteilt.1
Wenn wir wissen, dass die Ankünfte Xk auf diese Weise verteilt sind, so können wir
beispielsweise als eine Kenngrösse des Wartesystems die durchschnittliche Anzahl der
1
Dies entspricht der Wahrscheinlichkeit, dass die ersten n Skifahrer am Lift ankommen, bevor zum ersten Mal
ein Skifahrer vorbeifährt.
25
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
ankommenden Skifahrer am Lift, also die mittlere Anzahl der im Zeitintervall [k − 1, k[
(bzw. der in irgendeinem Zeitintervall) ankommenden Skifahrer, berechnen als:
E(Xk ) =
∞
X
n=0
=
n · P (Xk = n) = (1 − α) ·
α
.
1−α
∞
X
n=0
n · αn
Kennen wir also den Anteil α aller Skifahrer, die den Lift überhaupt benutzen wollen,
so haben wir auch bereits Kenntnis über die erwartungsgemäss in einem Zeitintervall
[k − 1, k[ dort ankommenden Skifahrer!
Ein weiterer, sich aus dem Prozess (Xk )k∈{1,2,...} ergebender, stochastischer Prozess mit
diskreter Zeit ist der Prozess (Nk )k∈{1,2,...} der Länge der Warteschlange (= Anzahl der
Wartenden) zum Zeitpunkt k (am Ende des Zeitintervalls [k − 1, k[ nach Ankunft der X
Skifahrer, aber vor Abfahrt des k-ten Tellers). Dieser Prozess lässt sich durch
Nk+1 =
(
Nk − 1 + Xk , falls Nk ≥ 1
X,
falls Nk = 0
beschreiben.
Wir sehen, dass bei diesem stochastischen Prozess die (zufällige) Warteschlangenlänge
Nk+1 unmittelbar vor dem Zeitpunkt k + 1 nur von der Länge der Warteschlange zum
Zeitpunkt k und von X, also den im Zeitintervall [k, k + 1[ ankommenden Skifahrern
abhängig ist, nicht jedoch davon, wie sich die Warteschlange in den Zeitpunkten vor k
verhalten hat. Stochastische Prozesse mit diskreter Zeit, bei denen der Wert zum Zeitpunkt k + 1 ausschließlich vom Wert zum Zeitpunkt k abhängt (und nicht von noch
früheren Werten), haben die sogenannte Markov-Eigenschaft.
Für den Prozess (Nk )k∈{1,2,...} könnten wir nun beispielsweise die Frage stellen, wie wahrscheinlich es ist, dass wir am Ende von Intervall [k, k + 1[ genau j Skifahrer in der
Warteschlange sehen, sofern wir zum Ende des vorhergehenden Zeitintervalls [k − 1, k[
i wartende Skifahrer beobachtet haben. Um diese Wahrscheinliochkeite zu beschreiben
überlegen wir uns, welches Ereignis im Intervall [k, k + 1[ stattgefunden haben muss.
Damit rechnen wir dann die sog. „Übergangswahrscheinlichkeiten“, d. h. die bedingten
Wahrscheinlichkeiten der Warteschlangenlänge
Pij
:= P (Nk+1 = j | Nk = i)
=
P (im Zeitintervall [k, k + 1[ stehen j Skifahrer in der Warteschlange |
im Zeitintervall [k − 1, k[ standen i Skifahrer in der Warteschlange)
aus. Wir überlegen uns:
– 0 ≤ j < i − 1: da zu jedem Zeitpunkt k nur ein Teller für die Beförderung zur
Verfügung steht, kann nicht mehr als eine Person abgefertigt werden, also
Pij = 0.
– Falls j ≥ i−1 ≥ 0, so entspricht diese Situation dem Ereignis: „Im Intervall [k, k+1[
kommen j − i + 1 Personen an, eine Person wird befördert“). Also:
Pij = (1 − α) · αj−i+1 .
26
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
– Falls i = 0, j ≥ 1, heisst das „Im Intervall [k, k + 1[ kommen j Personen an“. )
Daher
P0j = P (Xk = j) = (1 − α) · αj .
– Für i = 0, j = 0, liegt das Ereignis vor „Im Intervall [k, k + 1[ kommen 0 Personen
an“). D.h.
P00 = P (Nk+1 = 0 | Nk = 0) = P (X = 0) = p0 = (1 − α).
Wir bezeichnen eine nicht-negative, ganzzahlige Zufallsvariable Z als gedächtnislos, falls
P (Z ≥ n + i|Z > n) = P (Z ≥ i), für alle n, i
gilt.
Interpretation: Wenn man weiß, dass Z den Wert n überschritten hat, so ist die Wahrscheinlichkeit, dass Z diesen Wert n auch noch um den Wert i überschreitet, genau so gross wie
die Wahrscheinlichkeit, dass Z den Wert i überschreitet. Der Wert ist also unabhängig von
n, die Zufallsvariable Z „merkt“ sich also den Wert n nicht . Daher kommt der Begriff der
„Gedächtnislosigkeit“.
Achtung: „gedächtnislos“ heisst nicht: P (Z ≥ n + i|Z ≥ n) = P (Z ≥ n + i).
Die Eigenschaft der Gedächtnislosigkeit spielt bei der Modellierung und Analyse technischökonomischer Wartesysteme eine sehr wichtige Rolle, da sie (zumindest idealisiert) häufig in
der Realität beobachtet werden kann. (Natürlich haben nicht alle stochastischen Prozesse eine
derartige Eigenschaft.)
Übung: Zeigen Sie, die Eigenschaft der Gedächtnislosikteit für eine geoemetrisch verteilte Zufallsvariable.
Interessant dabei ist nämlich, dass für ganzzahlige, nicht-negative Zufallsvariablen die geometrische Verteilung die einzige Verteilung ist, welche die Eigenschaft der Gedächtnislosigkeit
besitzt.
Kann man also die Gedächtnislosigkeit einer diskreten, nicht-negativen Zufallsvariable Z beobachten, so muss diese Zufallsvariable Z geometrisch verteilt sein.
Wenn man dies also weiß (beobachtet hat) , geht es nun „nur noch“ darum, den Parameter α
zu „ermitteln“.
Die „Gedächtnislosigkeit“ von Zufallsgrössen kann auch im Falle stetiger Zufallsvariablen beobachtet werden.
27
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
Definition 3.3
Eine nicht-negative (rellwertige) Zufallsvariable Z heisst exponential-verteilt mit Parameter λ > 02 , falls für alle t ≥ 0
P (Z ≤ t) = P (Z < t) = 1 − e−λt
gilt.
Die Exponentialverteilung ist deshalb von so großer Bedeutung bei der Analyse technischökonomischer Wartesysteme, weil sie die einzige Verteilung ist, die für stetige, nicht-negative
Zufallsgrössen Z die sog. „Markov-Eigenschaft“ (oft als Eigenschaft der „Gedächtnislosigkeit“
bezeichnet) besitzt. Wir nennen eine nicht-negative Zufallsvariable Z als gedächtnislos, falls
P (Z ≥ t + s|Z ≥ t) = P (Z ≥ s), für alle t, s
gilt.
Interpretation: Wenn man weiß, dass Z den Wert t überschritten hat, so ist die Wahrscheinlichkeit, dass Z diesen Wert t auch noch um weitere s überschreitet, genau so gross wie die
Wahrscheinlichkeit, dass Z den Wert s überschreitet. Der Wert ist also unabhängig von t, die
Zufallsvariable Z „merkt“ sich also den Wert t nicht . Daher kommt der Begriff der „Gedächtnislosigkeit“.
Achtung auch hier: „gedächtnislos“ heisst nicht: P (Z ≥ t + s|Z ≥ t) = P (Z ≥ t + s).
Für eine exponentialverteilte Zufallsvariable gilt:
P (Z ≥ t + s | Z ≥ t) =
=
P (Z ≥ t + s und Z ≥ t)
P (Z ≥ t)
P (Z ≥ t + s)
e−λ·(t+s)
=
= e−λ·s = P (Z ≥ s).
P (Z ≥ t)
e−λ·t
Exponentialverteilte Zufallsvariablen werden typischerweise zur Modellierung von Lebensdauern von Objekten herangezogen, die „nicht altern“, die also stets „so gut, wie neu“ sind. Beispielsweise wird sie oft für eine adäquate Beschreibung
i. der Länge von Telefongesprächen,
ii. der Zeit, welche zwischen zwei aufeinander folgenden eingehenden (ausgehenden) Anrufen
vergeht,
iii. der Lebensdauern von Bauteilen, bei denen Verschleisserscheinungen nicht berücksichtigt
werden (müssen), siehe etwa „LED-Leuchtmittel“,
2
In der Literatur findet man auch manchmal die Bezeichnung „negativ exponential-verteilt“.
28
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
herangezogen.
Die obige Formel zeigt dies gerade: denn beschreibt Z etwa das Alter eines „nicht alternden“
Objektes, so sagt die Formel aus, dass im Falle einer Exponentialverteilung die Verteilung der
„Restlebensdauer“ s, gilt P (Z ≤ s) = P (Z ≤ t + s | Z > t), sie also unabhängig vom jetzigen
Alter t ist. „Die Überlebenswahrscheinlichkeit des Objektes in Bezug auf einen bestimmten
Zeitpunkt ist also unabhängig vom bisher erreichten Alter“.
Bei vielen in der Praxis vorkommenden, technisch-ökonomischen Wartesystemen kann man
nun (zumindest idealisiert) qualitativ beobachten, dass
(i)
a) die Zwischenankunftszeiten τk := Tk − Tk−1 , k = 1, 2, . . . jeweils stochastisch
unabhängige Zufallsvariablen sind,
b) die Zufallsvariablen τk identisch verteilt sind (also die Verteilung unabhängig von k
ist) und daher durch eine Zufallsvariable τ beschrieben werden kann
c) die Zufallsvariable τ die Eigenschaft der Gedächtnislosigkeit besitzt
(ii)
a) die Bedienzeiten Sk , k = 1, 2, . . . stochastisch unabhängige Zufallsvariablen sind.
b) die Zufallsvariablen Sk identisch verteilt sind (also die Verteilung unabhängig von
k ist) und daher durch eine Zufallsvariable S beschrieben werden kann
c) die Zufallsvariable S die Eigenschaft der Gedächtnislosigkeit besitzt
Kann man dies also für die einzelnen Zufallsvariablen „Zwischenankunftszeiten“ τ bzw. „Bedienzeiten“ S – zumindest idealisiert – feststellen, so muss die entsprechende Zufallsvariable
exponentialverteilt sein, d.h.
P (τ ≤ t) = 1 − e−λt , für geeignetes λ > 0,
bzw.
P (S ≤ t) = 1 − e−µt , für geeignetes µ > 0,
Damit geht es also nun aber „nur noch“ darum, die geeigneten Parameter λ ( bzw. µ) zu
„ermitteln“.
Hierzu macht man sich das Folgende zunutze: ist Z eine exponential-verteilte Zufallsvariable
(also P (Z ≤ t) = 1 − e−λt ), dann gilt für den Erwartungswert:
E(Z) =
1
.
λ
Die Grösse λ kann also angegeben werden, sofern man den Erwartungswert der Zufallsvariablen
kennt. Bei der Analyse eines konkreten Wartesystems könnte man daher also etwa so vorgehen,
und die beiden Erwartungswerte E(τ ) bzw. E(S) schätzen (bzw. experimentell bestimmen),
und auf diese Weise die Parameter λ bzw. µ ermitteln.
Bemerkung 3.4
Für eine exponential-verteilte Zufallsvariable Z mit Erwartungswert E(Z) =
aus :
29
1
λ
rechnen wir
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
•
1
− E(Z)
·E(Z)
P (Z ≤ E(Z)) = 1 − e
•
= 1 − e−1 = 1 − 0, 367 ≈ 0, 63
1
·0,5·E(Z)
− E(Z)
P (Z ≤ 0, 5 · E(Z)) = 1 − e
OR II c, Master-Modul IV
= 1 − e−0,5 = 1 − 0, 6065 ≈ 0, 40
Die Wahrscheinlichkeit, dass eine exponential-verteilte Zufallsvariable Z einen Wert annimmt,
der kleiner als ihr Mittelwert E(Z) ist, beträgt also mehr als 60%, und die Wahrscheinlichkeit, dass sie einen Wert annimmt, der kleiner als 12 · E(Z) ist, beträgt immer noch ungefähr
40%. Exponentialverteilte Zufallsvariabeln „bevorzugen“ also (gemessen am Mittelwert) kleinere Zwischenankunftszeiten.
Beispiel 3.5
In einer ALDI-Filiale wird im Rahmen einer Service-Analyse das Bedienverhalten an einer
der Kassen Kasse untersucht. Es wird dabei festgestellt, dass sich die Bedienzeiten der Kunden
„gedächtnislos“ verhalten und eine Bedienung im Durchschnitt 1 min 40 sec (= 100 sec) dauert.
Der Filialleiter gewinnt daraus folgende Informationen:
• die Bedienzeit S eines Kunden ist exponential-verteilt, d.h. P (S ≤ t) = 1 − e−µt
• Um µ zu bestimmen, führt man den Ansatz durch:
100 sec = E(S) =
1
1
⇔µ=
sec−1
µ
100
.
Mit diesen Daten kann man nun beispielsweise die Wahrscheinlichkeit berechnen, dass die
Bedienzeit eines Kunden nicht länger als 10 sec dauert:
−1
P (S ≤ 10 sec ) = 1 − e−0,01 sec ·10 sec = 1 − e−0,1 = 0, 0951 ≈ 0, 1
Oder die Wahrscheinlichkeit, dass sie länger als 80 sec ist :
−1
P (S ≥ 80 sec ) = 1 − P (S ≤ 80 sec ) = 1 − (1 − e−0,01 sec ·80 sec ) = e−0,8 = 0, 449 ≈ 0, 45
Der Filialleiter interpretiert diese Größen nun so, dass bei ca. 10 % der Kunden der Kassiervorgang nicht länger als 10 Sekunden benötigt und ca. 45 % der Kunden länger als 80 Sekunden
an der Kasse stehen.
Übung
In einer Zahnarztpraxis befinden sich 2 Behandlungsstühle. Die Behandlungszeiten der einzelnen Patienten sind voneinander unabhängig und exponential-verteilt mit Mittelwert 20 Minuten. Innerhalb der den nächsten 30 Minuten kommen genau 3 Patienten, nämlich A (zum
Zeitpunkt 0), B (zum Zeitpunkt 15 min) und C ( zum Zeitpunkt 30 min) in der Praxis an,
um dort behandelt zu werden. Zum Zeitpunkt 0 wird kein Patient behandelt.
Wenn B ankommt, wird A noch behandelt, wenn C ankommt befinden sich beide, A und B,
noch in Behandlung.
• Wie gross ist die Wahrscheinlichkeit, dass A vor B mit der Behandlung fertig ist?
30
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
• Wie gross ist die Wahrscheinlichkeit, dass C vor A mit der Behandlung fertig ist?
• Wie gross ist die Wahrscheinlichkeit, dass C vor B mit der Behandlung fertig ist?
Überlegen Sie sich dies bitte selbst.
Im Weiteren werden wir nun zunächst davon ausgehen, dass alle betrachteten Wartesysteme
exponentialverteilte Zwischenankunftszeiten (Parameter λ) und exponentialverteilte Bedienzeiten (Parameter µ) besitzen. In diese4m Fall so können wir dann auch eine Aussage über die
„Anzahl der Ankünfte“ in einem bestimmten Beobachtungsintervall [0, t] treffen.
Wir machen dazu zunächst die folgende allgemeine Definition:
Definition 3.6
Es sei (Zk )k∈N0 ist ein stochastischer Prozess mit diskreter Zeit, 0 = Z0 ≤ Z1 ≤ Z2 ≤ . . .,
so dass die Differenzen zk := Zk − Zk−1 , k = 1, 2, . . . voneinander unabhängige Zufallsvariable
sind, welche alle mit demselben Parameter λ > 0 exponentialverteilt sind. Für t ≥ 0 sei die Zufallsvariable Xt definiert als Xt := j, falls Zj ≤ t < Zj+1 . Dann nennen wir den stochastischen
Prozess mit stetiger Zeit (Xt )t∈[0,∞[ einen Poisson-Prozess mit Intensität λ.
Bemerkung 3.7
(i) Beschreibt der stochastische Prozess (Zk )k∈N0 speziell die Ankunftszeitpunkte Tk (wir
haben also den Prozess (Tk )k∈N0 ), so spricht bei dem zugehörigen stochastischen Prozess
(Xt )t∈[0,∞[ auch häufig von einem Poisson’schen Ankunftsprozess mit Intensität
λ. Statt Xt schreibt man in diesem Fall αt . Die Zufallsvariable αt zählt also gerade die
im Intervall [0, t[ am Wartesystem angekommenen Kunden.
Xt=®t
5
4
3
2
1
T1
T2 T3
T4
T5
t
(ii) Der Begriff „Poisson-Prozess“ rührt daher, dass sich aus der Exponentialverteilung der
Differenzen zk = Tk −Tk−1 (also P (zk ≤ t) = 1−e−λt ) die Verteilung der Zufallsvariablen
αt im stochastischen Prozess (Xt )t∈T ergibt als
P (αt = k) =
31
(λ · t)k −λt
·e .
k!
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
Für einen festen Zeitpunkt t ist die Zufallsvariable Xt also Poisson-verteilt mit Parameter λ · t. (siehe Übung)
(iii) Wir haben genauer (siehe bspw. [30]):
(αt )t≥0 Poisson-verteilt mit Intensität λ ⇔ τ exponentialverteilt mit Parameter λ.
Sind in einem Wartesystem die Zwischenankunftszeiten der Kundenankünfte exponentialverteilt mit Parameter λ, dann ist die Zufallsvariable αt , die die Anzahl
der Ankünfte beschreibt, die im Zeitintervall [0, t[ stattfinden, Poisson-verteilt
mit Parameter λ · t. Und umgekehrt.
(iv) Ist (Xt )t∈[0,∞[ ein Poisson-Prozess mit Intensität λ, so gilt (bekanntlich) für den Erwartungswert und die Varianz der Zufallsvariablen Xt :
E(Xt ) =
∞
X
k=0
k · P (Xt = k) = λ · t
und
Var(Xt ) = λ · t.
Beschreibt (αt )t∈[0,∞[ einen Poisson’schen Ankunftsprozess mit Intensität λ, so ist die
„durchschnittliche Anzahl“ von Kunden, die bis zum Zeitpunkt t in das System eingetreten sind, also gleich λ · t.
Die Größe λ entspricht also gerade der „durchschnittlichen Anzahl“ von Kunden, die
pro Zeiteinheit in das System eintreten, d. h. der Ankunftsrate für das technischökonomische Wartesystems.
(v) Durch Satz 2.18 (siehe Seite 18) wissen wir, dass sich Poisson-Prozesse „addieren“.
Haben wir beispielsweise „Kunden eines Typs I“, deren Ankunftsprozess am System
durch einen Poisson-Prozess (αIt )t∈[0,∞[ einen mit Ankunftsrate λI , beschrieben werden kann und „Kunden eines Typs II“, deren Ankunftsprozess am System durch einen
II
Poisson-Prozess (αII
t )t∈[0,∞[ mit Ankunftsrate λ , erfolgt, so ist der gemeinsame Ankunftsprozess beider Kundentypen ebenfalls ein Poisson-Prozess mit der Ankunftsrate
λ = λI + λII .
Eine analoge Aussage gilt natürlich auch für mehr als zwei „Kundentypen“.
(vi) Betrachten wir die „umgekehrte“ Situation: Gegeben sei ein Poisson’scher Ankunftsprozess mit Ankunftsrate λ. Angenommen jeder Kunde, der ankommt, gehört zu einem von
zwei Kundentypen („Typ 1“ bzw „Typ II“).
Mit Wahrscheinlichkeit p ist er „Kunde des Typs I“, mit Wahrscheinlichkeit 1− p „Kunde
des Typs II“. Die die Ankünfte der beiden Typen sind unabhängig voneinander. Dann
sind die so aufgeteilten Ankunftsprozesse (αIt )t∈[0,∞[ bzw. (αII
t )t∈[0,∞[ der jeweiligen
Kundentypen ebenfalls Poisson’sche Ankunftsprozesse mit den Parametern λI = p · λ
bzw. λII = (1 − p) · λ.
Diese „Splitting-Eigenschaft“ gilt auch hier für mehr als zwei solcher Aufteilungen.
Beispiel 3.8
Bei der Situation in Beispiel 3.5 werde zudem festgestellt, dass durchschnittlich alle 10 Sekunden ein Kunde an die Kasse herantritt, wobei die Zeit, die zwischen dem Herantreten vergeht
sich gedächnislos verhält. Der Filialleiter ist daran interessiert, zu erfahren
32
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
• wie gross die Wahrscheinlichkeit ist, dass innerhalb einer Minute mehr als 6 Kunden an
die Kasse herantreten
• wie gross die Wahrscheinlichkeit ist, dass innerhalb einer Minute genau 3 Kunden an die
Kasse herantreten
Um dies zu ermitteln, schliesst er aus der Gedächtnislosigkeit der Zwischenankunfstzeit τ
zunächst, dass diese exponentialverteilt sind (mit Parameter λ). Wenn er die Zeiteinheit als
„Minute“ festlegt, beobachtet er also durchschnittlich 6 Personenankünfte pro Minute erhält
6
= 6 · min−1 .
so die Ankunftsrate λ = min
Nun ermittelt er für das Intervall [0, 1] (also t = 1 min) die Wahrscheinlichkeiten
P (α1 = k) =
(6 · t)k −6·t
·e
.
k!
Er erhält
Kunden k
0
1
2
3
4
5
6
7
8
usw.
P (α1 = k)
0,0025
0,015
0,0446
0,0892
0,1339
0,1606
0,1606
0,1307
0,1033
usw.
Damit haben wir dann
P (α1 > 6) = 1 −
6
X
i=0
P (α1 = i) ≈ 1 − 0, 604 = 0, 396
und
P (α1 = 3) ≈ 0, 09.
Für die Untersuchung von Wartesystemen benötigt man – wie wir sehen werden – auch den
Zuwachs αt − αs der innerhalb eines bestimmten Zeitintervalls [s, t] in das System eingetretenen Kunden. Die zufällige Größe ∆s,t = αt − αs , welche diesen beschreibt, kann offenbar
nur die Werte 0, 1, . . . annehmen. Eine Eigenschaft, die für man für die Beschreibung dieser
Zuwächse ausnutzt, wird durch den folgenden wichtigen allgemeinen Sachverhalt beschrieben
(siehe [30]).
Satz 3.9
Ein monoton wachsender, stochastischer Prozess (Xt )t∈[0,∞[ ist ein Poisson-Prozess mit der
Intensität λ > 0 genau dann, wenn die beiden folgenden „Prozess-Eigenschaften“ vorliegen:
33
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
(i) („Prozess mit unabhängigen Zuwächsen“)
Es gilt X0 = 0, und für jedes s ∈ [0, t[ sind die Zufallsvariablen ∆s,t = Xt −Xs voneinander
stochastisch unabhängig .
(ii) („Prozess mit Poisson-verteilten Zuwächsen“)
Für alle festen s, t mit 0 ≤ s < t ist ∆s,t = Xt − Xs eine Poisson-verteilte Zufallsvariable
mit dem Parameter λ · (t − s), d. h.
P (∆s,t = k) = P (Xt − Xs = k) =
(λ(t − s))k −λ(t−s)
·e
k!
Bemerkung 3.10
Aus der Tatsache, dass ein Poisson-Prozess auch Poisson-verteilte Zuwächse besitzt, ergibt
sich zunächst
P (αt+h − αs+h = k) = P (αt − αs = k) = P (αt−s = k) für alle k ≥ 0.
Diese Eigenschaft beschreibt die sog. Stationarität bzw. die zeitliche Homogenität des Prozessen
(αt )t∈[0,∞[ .
Nutzt man nun die Reihendarstellung der e-Funktion (siehe Kap. 2.4), d.h.
∞
X
e−x =
i=0
(−1)i ·
xi
x1 x2 x3
=1−
+
−
...,
i!
1!
2!
3!
dann schliesst man für s = t + h und h „klein“:
(i) P (αt+h − αt = 1) =
(λ·h)1
1!
· e−λ·h = λ · h · (1 − λ · h +
(ii) P (αt+h − αt = 0) =
(λ·h)0
0!
· e−λ·h = 1 · (1 − λ · h +
(iii) P (αt+h − αt = k ≥ 2) =
(λ·h)k
k!
· e−λ·h =
(λ·h)k
k!
(λ·h)2
2!
(λ·h)2
2!
−
· (1 − λ · h +
−
(λ·h)3
3!
(λ·h)3
3!
(λ·h)2
2!
. . .) = λ · h + o(h)
. . .) = 1 − λ · h + o(h)
−
(λ·h)3
3!
. . .) = o(h)
Beispiel 3.11
Als Fan des Fussball-Vereins „Borussia Dortmund“ gehen Sie durchschnittlich einmal im Monat (= 30 Tage) in das heimische Stadion, besuchen dort ein Bundesligaspiel, schauen sich
Trainings an oder besuchen die Vereins-Kneipe, um dort gegebenenfalls Spieler zu treffen, etc.
Sie haben festgestellt, dass die Zeit zwischen zwei solcher Besuche exponentialverteilt ist. Beantworten Sie bitte die folgenden Fragen:
• Wie groß ist die Wahrscheinlichkeit, dass Sie in einer Zweimonatsperiode das Stadion
nicht besucht haben?
• Wie groß ist die Wahrscheinlichkeit, dass Sie mehr als 6 mal im Jahr das Stadion besucht
haben?
• Wie groß ist die Wahrscheinlichkeit, dass zwischen 2 Besuchen mehr als 3 Monate vergangen sind?
34
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
• Wie gross ist die Wahrscheinlichkeit, dass Sie innerhalb der nächsten beiden Tage zweimal
das Stadion besuchen?
• Wie groß ist die Wahrscheinlichkeit, dass Sie sowohl heute als auch morgen einmal ins
Stadion gehen?
• Wie groß ist die Wahrscheinlichkeit, dass Sie während eines gesamten Jahres nicht im
Stadion waren?
Siehe auch Übungsblatt 2.
Zusammenstellung der Eigenschaften des Ankunftsprozesses (αt )t∈[0,∞[ mit Intensität λ
Wenn die Zwischenankuftszeiten τ mit Parameter λ exponentialverteilt sind, dann gilt:
(i) Für festes t ist die Zufallsvariable αt Poisson-verteilt mit Parameter λ · t
P (αt = k) =
(λ · t)k −λt
·e
k!
(ii) Als durchschnittliche Anzahl der bis zum Zeitpunkt t angekommenen Kunden ergibt sich:
E(αt ) = λ · t
(iii) Die durchschnittliche Anzahl der pro Zeiteinheit angekommenen Kunden entspricht der
Ankunftsrate =
E(αt )
=λ
t
(iv) Als Wahrscheinlichkeitsverteilung für die Anzahl der „Neukunden“ im Intervall [t, s] erhält man:
(λ(s − t))k −λ(s−t)
P (αs − αt = k) =
·e
k!
(v) Speziell für s = t + h und h „klein“, d. h. h → 0 gilt † :
P (αt+h − αt = 1) = P (αh = 1) = λ · h + o(h)
P (αt+h − αt = 0) = P (αh = 0) = 1 − λ · h + o(h)
P (αt+h − αt ≥ 2) = P (αh ≥ 2) = o(h)
(vi) Markov-Eigenschaft des Ankunftsprozesses, d. h. für festes t hängt der weitere Ankunftsprozess αt+h nur von αt , nicht von der Vergangenheit ab:
P (αt+h = k | αt = i, αt1 = i1 , . . . , αtk = ik )
= P (αt+h = k | αt = i)
für alle t > t1 > t2 > . . . > 0, h > 0
35
3 Stochastische Prozesse in Wartesystemen, „Gedächtnislosigkeit“
OR II c, Master-Modul IV
Konvention: Sind in einem technisch-ökonomischen Wartesystem die Zwischenankunftszeiten
bzw. Bedienzeiten exponentialverteilt (mit Parameter λ bzw. µ), so wird in der Kendall’schen Notation für die Symbole τ und S der Buchstabe M gesetzt.
M steht für „Markov-Eigenschaft“ der zugehörigen Ankunfts- bzw. Bedienmuster, z. B.
M |M |m|K|FIFO.
36
4 Das Wartesystem M |M |1
Als Motivation für dieses Kapitel betrachten wir das folgende Beispiel.
Beispiel 4.1
Die Hausdruckerei eines Marketingdienstleisters möchte einen neuen Drucker kaufen. Fünf verschiedene Modelle hat sie zur Auswahl. In der folgenden Tabelle sind für die Modelle jeweils
die Druckerkosten (pro Stunde, in der der Drucker arbeitet) und die jeweilige Druckgeschwindigkeit (in „Seiten pro Minute“) angegeben.
Drucker
Drucker
Drucker
Drucker
Drucker
1
2
3
4
5
Druckerkosten
[e pro Stunde]
40 e
50 e
60 e
70 e
80 e
Druckgeschwindigkeit
[Seiten pro Minute]
30 Seiten
35 Seiten
40 Seiten
45 Seiten
50 Seiten
Aus der Vergangenheit weiß man, dass die Druckaufträge, die elektronisch aus den einzelnen
Abteilungen an den Drucker gesendet werden, als Poisson-Prozess mit der Intensität von 4
Aufträgen pro Stunde eingehen und die jeweilige Druckumfänge exponential-verteilt sind mit
einer durchschnittlichen Auftragsgröße von 400 Seiten.
Bei der Entscheidung welcher Drucker ausgewählt werden soll, rechnet die Druckerei – neben
den Druckerkosten – mit „internen Strafkosten“ in Höhe von EUR 25,– für jeden Druckauftrag,
der an einem Tag nicht erledigt werden kann.
Es soll nun derjenige Drucker ausgewählt werden, dessen durchschnittliche Gesamtkosten eines
Tages möglichst gering ist. Es wird davon ausgegangen, dass die Drucker ohne Unterbrechung
arbeiten können.
Wir werden sehe, dass wir ein derartiges Entscheidungsproblem durch die Analyse geeigneter
Wartesysteme eines bestimmten Typs behandeln können.
4.1 Stationären Verteilungen in M|M|1-Wartesystemen
Wir betrachten folgendes technisch-ökonomische Wartesystem, bei dem wir folgende Beobachtungen gemacht haben:
37
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
a) Die Zwischenakunftszeiten der Kunden sind von einander unabhängig und verhalten sich
gedächtnislos:
⇒ τ exponentialverteilt mit Parameter λ (=
ˆ Ankunftsrate)
⇒ Ankunftsprozess (αt )t∈[0,∞[ ist ein Poisson’scher Ankunftsprozess.
b) Die Bedienzeiten der Kunden sind von einander unabhängig und verhalten sich gedächtnislos:
S exponentialverteilt mit Parameter µ ( µ1 =
ˆ durchschnittliche Bedienzeit)
c) Das Wartesystem hat eine Bedienstation
d) die Kapazität der Warteplätze ist beliebig gross.
e) Die Bedienungsdisziplin ist FIFO.
4.1.1 Zeitabhängige Analyse des Systems
Es handelt sich also um ein M |M |1-Wartesystem.
Dieses wollen wir nun genauer untersuchen.
Dazu betrachten wir die Grösse Lt die Anzahl der Kunden im Wartesystem zum Zeitpunkt
t (also die Länge der Warteschlange plus den Kunden, der gerade bedient wird). (Lt )t∈[0,∞[
beschreibt also einen stochastischen Prozess mit stetigem Zeitparameter, der sowohl das Ankunftsmuster als auch die Bedienung berücksichtigt. Die Grösse Lt ist eine erste „elementare“
Kenngröße eines Wartesystems. Wir wollen uns daher für ihre Verteilung interessiert.
Offenbar ist Lt eine diskrete Zufallsvariable, die Werte in {0, 1, 2, . . . , j, j + 1, . . .} annimmt.
Die Verteilung P (Lt = j), j = 0, 1, 2, . . . dieser Zufallsvariablen Lt können wir herleiten, indem
wir für die beiden Zeitpunkte t und t + h (h „klein“) Lt bzw. Lt+h beobachten und überlegen,
was aufgrund dieser beiden Beobachtungen im Intervall [t, t+h] im Wartesystem alles „passiert
sein muss“.
Wir halten also einen (beliebigen) Zeitpunkt t fest und schauen uns Lt und Lt+h an. Indem
wir die Erkenntnisse aus Bemerkung 3.10 nutzen, erhalten wir die folgende Übersicht:
38
4 Das Wartesystem M |M |1
Zustand, in
dem sich Lt
befinden kann
OR II c, Master-Modul IV
Zustand, in
dem sich Lt+h
befinden kann
Lt = 0
Lt+h = 0
Lt = 1
Lt+h = 0
für i ≥ 1 :
Lt = i − 1
Lt+h = i
Lt = i
Lt+h = i
Lt = i + 1
Lt+h = i
Wahrscheinlichkeit
für dieses Ereignis
(jeweils +o(h))
Welches Ereignis hat in
[t, t + h] stattgefunden?
kein neuer Kunde angekommen;
ein Kunde wurde bedient;
1 − λh
ein neuer Kunde ist angekommen;
kein neuer Kunde angekommen, und kein Kunde abgefertigt
oder
λh
µh
1 − (λh + µh)
ein neuer Kunde angekommen und ein Kunde abgefertigt;
ein Kunde wurde abgefertigt;
0
µh
Wir können uns das Verhalten in [t, t + h[ auch an einem (unendlichen) bewerteten Digraphen
~ = (V, E, c) klarmachen. Dabei seien die Größen wie folgt gegeben:
G
=
b Menge der möglichen Zustände von Lt bzw. Lt+h (also mögliche Anzahl
von Kunden im Wartesystem während unseres „kleinen“ Beobachtungszeitraumes)
E =
b Menge der möglichen Übergänge von Lt nach Lt+h
V
c =
b Wahrscheinlichkeitsintensitäten der Übergänge (der Faktor h wurde
weggelassen).
λ
0
λ
...
1
µ
µ
λ
λ
λ
i
i−1
µ
µ
λ
...
i+1
µ
µ
Um für festes t die Verteilung der Zufallsvariablen Lt zu bestimmen, müssen wir also P (Lt = i)
für i = 0, 1, 2, . . . ermitteln. Die Ermittlung überlegen wir uns folgendermaßen:
Schreiben wir wir
pi (t) := P (Lt = i),
so haben nach den obigen Überlegungen für den „kleinen“ Beobachtungszeitraum [t, t + h[
folgende Bedingungen:
p0 (t + h) = (1 − λ · h) · p0 (t) + µ · h · p1 (t)
pi (t + h) = λ · h · pi−1 (t) + (1 − λ · h − µ · h)pi (t) + µ · h · pi+1 (t)
39
für i ≥ 1.
(4.1)
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Durch Umformung des Gleichungssystems (4.1) erhalten wir dann:
p0 (t + h) − p0 (t)
h
pi (t + h) − pi (t)
h
= −λ · p0 (t) + µ · p1 (t)
= λ · pi−1 (t) − (λ + µ) · pi (t) + µ · pi+1 (t) für j ≥ 1.
Nun lassen wir das Intervall [t, t + h[ immer „kleiner“ werden. Für h → 0 erhält man dann das
sog. Chapman-Kolmogorov-Differentialgleichungs-System
p′0 (t) = −λ · p0 (t) + µ · p1 (t)
p′i (t) = λ · pi−1 (t) − (λ + µ) · pi (t) + µ · pi+1 (t)
für i = 1, 2, . . . ,
(4.2)
welches durch die Angabe einer Anfangsbedingung (für den Zeitpunkt t = 0) pi (0) für i =
0, 1, . . . eindeutig gelöst werden könnte.
Die Lösung p0 (t), p1 (t), . . . würde dann dann gerade wegen P (Lt = i) = pi (t) für i = 0, 1, . . .
die Verteilung für die Zufallsvariable Lt bei festem aber beliebigem Zeitpunkt t liefern.
Dieses Differentialgleichungssystem wollen wir allerdings hier nicht lösen, sonder uns stattdessen mit einer vom Zeitpunkt t unabhängigen Analyse des Systems beschäftigen.
4.1.2 Zeitunabhängige Analyse; stationärer Zustand bzw. Gleichgewichtszustand
Bei der Analyse von Wartesystemen interessiert man sich oft nicht für das „ momentane Verhalten“ von Lt zu einem bestimmten Zeitpunkt t, sondern stellt sich die Frage, was über das
System ausgesagt werden kann, wenn man es sich „lange genug selbst überlassen“ hat.
Oft „schwingt sich ein solches System nämlich ein“ und befindet sich dann in einem sog.
„stationären Zustand“ oder auch „Gleichgewichtszustand“ (steady state, ).
Wir wollen deshalb im weiteren nur derartige Situationen, also Wartesysteme im stationären Zustand betrachten.
Formal bedeutet dies, dass wir von den Verteilungen pi (t) des Prozesses (Lt )t∈[0,∞[ fordert, dass
diese unabhängig von t werden, wenn t hinreichend groß ist (also nach der „Einschwingzeit“).
Dies wiederum heisst, dass in einem solchen „stationären Zustand“ aus dem stochastischen
Prozess (Lt )t∈T eine (von t unabhängige) Zufallsvariable L wird. Diese Zufallsvariable L beschreibt dann gerade die „Anzahl der Kunden im Wartesystem im stationären Zustand“. Für
diesem Fall heisst das dann
pi (t) = p∗i , für t ≥ t0 ,
pi (t) ist also für jedes i eine Konstante. Damit ist also p′i (t) ≡ 0. Dies führt für das M |M |1
System dann zu
λ
· p∗0
µ
p′i (t) ≡ 0 = λ · p∗i−1 − (λ + µ) · p∗i + µ · p∗i+1 , i ≥ 1.
p′0 (t) ≡ 0 = −λ · p∗0 + µ · p∗1
⇐⇒
p∗1 =
Daraus ergibt sich die folgende rekursive Berechnungsvorschrift:
40
(4.3)
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
λ · p∗i = µ · p∗i+1 ,
und damit
λ
p∗i = ( )i · p∗0 ,
µ
(Machen Sie sich dies bitte klar). Da aber auch
∞
X
1=
p∗i
=
p∗0
i=0
sofern
λ
µ
i = 0, 1, . . .
·
i ∈ N0 .
P∞
∗
i=0 pi
∞ i
X
λ
i=0
µ
= 1 gelten muss, hat man
= p∗0 ·
1
1−
λ
µ
,
< 1 gilt. Man erhält also insgesamt
p∗0 = 1 −
λ
µ
und
p∗i =
λ ∗
λ
·p
= ( )i · p∗0 ,
µ i−1
µ
i = 1, 2, . . . .
(4.4)
Die Grössen (p∗i )i∈N0 heißen stationäre Zustandswahrscheinlichkeiten des Prozesses
(Lt )t∈[0,∞[ , d. h. es ist p∗i = P (L = i).
In der Praxis werden die Zustandswahrscheinlichkeiten oft als
p∗i =
ˆ zeitlicher Anteil, in dem sich das Wartesystem im Zustand L = i befindet
interpretiert. Die spezielle Grösse p∗0 als ein Mass dafür, dass ein ankommender Kunde sofort
bedient werden kann, wird oft als „Servicegrad“ bezeichnet.
Man erkennt aus den Gleichungen 4.3 auch eine Art „Flusserhaltung“.
In jedem Zustand Nr. i ≥ 1 (in der Graphik ist i ≥ 1) entspricht der „Fluss“ auf denjenigen
Kanten, die aus dem Zustand Nr. i heraus zu anderen Zuständen verlaufen
(λ + µ) · p∗i
dem „Fluss“ auf den Kanten, die von anderen Zuständen in den Zustand Nr. i hinein verlaufen
λ · p∗i−1 + µ · p∗i+1 .
λ · p∗i−1
λ · p∗i
i
„=“
i
µ · p∗i
„+“
i
µ · p∗i+1
41
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
4.2 Die Pasta-Eigenschaft
Die sog. Pasta-Eigenschaft liefert eine weitere Interpretation der stationären Zustandswahrscheinlichkeiten p∗i . Wir überlegen uns dazu, wie wahrscheinlich es ist, dass ein neu ankommender Kunde im System genau j Kunden vorfindet. Wie bereits vorher, schauen wir uns dazu
zunächst die zeitabhängige Formulierung an. Dazu fixieren wir wieder t und schreiben
ri (t) := P [Ein zum Zeitpunkt t neu ankommener Kunde findet genau Lt = i Kunden vor].
Wir rechnen
ri (t) = limh→0 P [Lt−h = i | αt − αt−h = 1]
P [Lt−h = i ∧ αt − αt−h = 1]
= limh→0
P [αt − αt−h = 1]
P [Lt−h = i] · P [αt − αt−h = 1]
= limh→0
P [αt − αt−h = 1]
= limh→0 P [Lt−h = i] = P [Lt = i] = pi (t).
Auch hier kann man nun wieder den stationären Zustand des Wartesystems betrachten und
erhält:
ri∗ = P [Ein neu ankommener Kunde findet genau L = i Kunden vor] = p∗i .
Diese Eigenschaft ri∗ = p∗i wird oft als Pasta-Eigenschaft bezeichnet(„Poisson arrivals see
time averages“, siehe [33]).
Pasta-Eigenschaft: Im Gleichgewichtszustand eines M |M |·-Systems entspricht
der Anteil ri∗ derjenigen neu ankommender Kunden, welche das Wartesystem in
einem bestimmten Zustand (hier: L = i) vorfinden, dem zeitlichen Anteil = p∗i ,
in dem sich das Wartesystem in diesem bestimmten Zustand befindet
Diese Eigenschaft gilt allerdings nicht in jedem Wartesystem.
Übung: Geben Sie bitte ein D|D|1-Wartesystem (mit geeignet gewählten Zwischenankunftszeiten bzw. Bedienzeiten) an, bei dem die Pasta-Eigenschaft nicht gilt.
4.3 Verkehrsintensität; Auslastung eines Wartesystems
Bei der Bestimmung der stationären Verteilung (p∗i )j∈N0 in 5.4 spielt offenbar die (formale)
Bedingung µλ < 1 eine wesentliche Rolle. Das dies nicht nur eine formale Anforderung ist,
sonder auch inhaltlich interpretiert werden kann zeigt folgende Überlegung, die auch für ein
beliebiges Wartesystem angestellt werden.
In einem Wartesystem beschreibe λ die Ankunftsrate der Kunden und E(S) die mittlere Bedienzeit, d.h. pro Zeiteinheit kommen durchschnittlich λ Kunden an, und um einen Kunden
zu bedienen dauert es durchschnittlich E(S) Zeiteinheiten. Über die Verteilung der Ankünfte
42
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
bzw der Bedienzeiten ist hier nichts weiter ausgesagt (also nicht notwendig nur M |M |1). Die
Grösse
λ · E(S)
beschreibt also dann (im Mittel) die Anzahl der Kunden, die in dem Zeitraum ankommen,
während dessen durchschnittlich ein Kunde bedient wird. Sie wird Verkehrsintensität des Wartesystems genannt. Ist in einem Wartesystem mit einer Bedeinstation λ · E(S) > 1, so nimmt
dieses Wartesystem (auf Dauer) mehr Kunden auf, als es abfertigen kann. Die Warteschlange
wird also immer grösser und die Bedienstation(en) müssten intensiver arbeiten (Verringerung
der durchschnittlichen Bedienzeit), damit die Warteschlange nicht (noch) größer wird). Im umgekehrten Falle ̺ < 1, kann eine immer grösser werdenden Warteschlange nicht eintreten. In
einem solchen Falle heißt das Wartesystem stabil.
Interpretiert wird die Grösse ̺, als dermittlere zeitliche Anteil in dem die Bedienstation(en)
arbeiten und stellt ein Maß für die mittlere zeitliche Auslastung der Bedienstation(en) dar.
In einem M |M |1-System ist
λ · E(S) =
λ
:= ̺.
µ
Nur wenn sicher gestellt werden kann, dass die Warteschlange nicht immer grösser wird (d.h.
̺ = µλ < 1) kann eine stationäre Verteilung von L bestimmt werden.
Zusammenfassend kann man nun für das Wartesystem M |M |1 die folgenden Aussagen formulieren (wir kommen auf die dort formulierten Sachverhalte später noch einmal etwas allgemeiner
zurück). Dieser Satz beschreibt die für die Beurteilung der Effektivität des Systems wesentlichen Größen.
Satz 4.2
Gegeben sei ein technisch-ökonomisches Wartesystem vom Typ M |M |1 mit Ankunftsrate λ
und Bedienrate µ. Es sei ̺ = µλ < 1.
(i) Es existieren die eindeutig bestimmten stationären Zustandswahrscheinlichkeiten
(p∗i )i∈N0 mit
p∗0 = (1 − ̺),
p∗i = ̺i · (1 − ̺).
(ii) Es beschreibe E(L) die durchschnittliche Anzahl der Kunden im System im stationären
Zustand. Dann gilt:
E(L) =
∞
X
i=0
i · p∗i =
∞
X
i=0
i · (1 − ̺) · ̺i =
̺
.
1−̺
(iii) Es beschreibe E(N ) die durchschnittliche Anzahl der Kunden in der Warteschlange im
stationären Zustand. Dann gilt:
E(N ) =
∞
X
i=0
i · P (N = i) =
∞
X
i=0
i · P (L = i + 1) =
43
∞
X
i=1
(i − 1) · p∗i = E(L) · ̺ =
̺2
.
1−̺
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
(iv) Für die durchschnittliche Anzahl E(δT ) der im Intervall [0, T ] abgefertigten Kunden gilt
E(δT ) = µ · T ·
∞
X
i=1
p∗i = µ · T · (1 − p∗0 ) = µ · T · ̺.
(v) Es beschreibe E(V ) die durchschnittliche Zeit, welche ein Kunde im Wartesystem verbringt (d. h. die durchschnittliche Verweilzeit), wenn das Wartesystem im stationären
Zustand vorliegt. Dann gilt:
E(V ) =
1
1
1
· E(L) =
=
λ
µ−λ
µ(1 − ̺)
( also
E(L) = λ · E(V )).
(vi) Es sei E(W ) die durchschnittliche Zeit, welche ein Kunde in der Warteschlange verbringt
(d. h. die durchschnittliche Wartezeit), wenn der stationäre Zustand vorliegt. Dann gilt:
E(W ) =
̺
̺
1
· E(N ) =
=
λ
µ−λ
µ · (1 − ̺)
( also
E(N ) = λ · E(W )).
(vii) Es sei E(C) die mittlere Länge eines Arbeitstaktes. d.h. des Zeitraums C, der zwischen
der Ankunft eines Kunden vergeht, der das System „leer“ vorfindet (L = 0) und dem
Zeitpunkt, bei dem es zum nächsten mal wieder “leer“ vorgefunden wird. Dann gilt
E(C) =
1
+ E(V ).
λ
(viii) Es sei E(W |L ≥ 1) die durchschnittliche Zeit, welche ein Kunde in der Warteschlange
verbringt, sofern er überhaupt warten muss. Dann gilt mit dem Satz 2.25, Seite 23 )im
stationären Zustand
E(W |L ≥ 1) =
1
1
· (E(W ) − E(W |L = 0) · P (L = 0)) =
· E(W ) = E(V ).
∗
1 − p0
1 − p∗0
(ix) Beschreibt P (V ≥ s) die Wahrscheinlichkeit, dass ein Kunde mehr als s Zeiteinheiten im
Wartesystem verbringt, so gilt:
s
− E(V
)
P (V ≥ s) = e
= e−s·(µ−λ) .
(x) Es beschreibe P (W ≥ s) die Wahrscheinlichkeit, dass ein Kunde mehr als s Zeiteinheiten
in der Warteschlange verbringt. Dann gilt:
s
−̺ E(W
)
P (W ≥ s) = ̺ · e
= ̺ · e−s·(µ−λ) .
Natürlich lassen sich aus der Tatsache, dass die stationären Zustandswahrscheinlichkeiten
(p∗i )i∈N0 bekannt sind, auch noch weitere, als die im Satz beschriebenen Größen bestimmen,
um sie dann zur Beurteilung der Effektivität des M |M |1-Systems zu verwenden.
44
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Man beachte auch: Die stationären Zustandswahrscheinlichkeiten p∗i sind offenbar unabhängig von der Bedienungsdisziplin. Daher haben auch die Erwartungswerte E(L), E(N ), E(V )
und E(W ) diese Eigenschaft.
Bemerkung 4.3
(i) Aus (vi) und (ii) sehen wir sofort, dass
E(W ) =
1
1
̺
· = E(L) · = E(L) · E(S)
(1 − ̺) µ
µ
gilt. Die durchschnittliche Wartezeit eines (ankommenden) Kunden ergibt sich – wie nicht
anders zu erwarten – als die Zeit, die benötigt wird, um die (durchschnittliche) Anzahl
der Kunden E(L), die sich bereits im System befinden, zu bedienen. Jeder einzelne dieser
Kunden braucht durchschnittlich µ1 = E(S) Zeiteinheiten.
(ii) Wegen E(V ) = E(W ) + E(S) ist dann natürlich
E(V ) = E(L) · E(S) + E(S) = E(L) ·
1
1
+ .
µ µ
(iii) Zur Herleitung von (vii)
Um die mittlere Länge E(C) zu berechnen, überlegen wir folgendermassen:
Der Zeitraum, der zwischen zwei solchen Arbeitstakten vergeht, setzt sich offenbar zusammen aus der Zeitspanne C0 , in der die Bedienstation frei ist (L = 0) und dem Zeitraum
C1 , an dem zum ersten mal die Bedienstation wieder frei wird. Da aber offensichtlich
C0 = τ gilt, ergibt sich
E(C) = E(C0 ) + E(C1 ) =
1
+ E(C1 ).
λ
Das Verhältnis der Zeiträume
E(C1 )
E(C)
entspricht aber auch gerade dem zeitlichen Anteil ̺, in dem die Bedienstation arbeitet.
Wir erhalten so
E(C1 )
=
E(C0 ) + E(C1 )
Es ergibt sich
E(C1 ) =
1
λ
E(C1 )
= ̺,
+ E(C1 )
1
.
µ · (1 − ̺)
und somit für die mittlere Länge eines Arbeitstaktes im M |M |1-System
E(C) =
45
1
+ E(V ).
λ
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
(iv) Zur Herleitung von (viii): Falls ein ankommender Kunde keinen weiteren Kunden vorfindet, so gilt P (W > s) = 0. Andernfalls findet er i ≥ 1 Kunden im System vor. In diesem
Fall ist also W = S1 + S2 + . . . + Si . Also gilt
P (W > s) = 1 − P (W ≤ s)
= 1−
p∗0
· P (0 ≤ s) +
∞
X
!
p∗i
· P (S1 + S2 + . . . + Si ≤ s | L = i) .
i=1
Jeder einzelne Summand dieser Reihe beschreibt die Verteilung der Summe von i unabhängigen Zufallsvariablen, die alle mit dem Parameter µ exponentialverteilt sind. Diese
Verteilung eines Summanden entspricht dann gerade einer Erlang-Verteilung mit den
Parametern µ und i (Erl(λ, i), siehe Kap. 2.3). Also berechnen wir:
P (S1 + S2 + . . . + Si ≤ s | L = i) =
s
Z i i−1 −µx
µx e
(i − 1)!
0
dx i ≥ 1
1
i=0
Daraus ergibt sich dann unter Benutzung von (i) für die Darstellung der p∗i und der
Reihendarstellung für die Exponentialfunktion (siehe Kap. 2.4):
P (W > s) = 1 − (1 − ̺) +
= ̺ + (1 − ̺) ·
= ̺ + (1 − ̺) ·
∞
X
i=1
Zs X
∞
0 i=1
Zs ∞
̺i (1 − ̺)
̺i ·
Zs
0
µi xi−1 e−µx
dx
(i − 1)!
X ̺i · µi xi−1
(i − 1)!
0 i=1
= ̺ + (1 − ̺) · ρ · µ ·
= ̺ − ̺ · µ · (1 − ̺)
Zs X
∞
0 i=0
Zs
µi xi−1 e−µx
dx
(i − 1)!
· e−µx dx
̺i · µi xi −µx
·e
dx
(i)!
e−µ(1−̺)x dx
0
−µ(1−̺)s
= ̺·e
= ̺ · e−(µ−λ)s .
Beispiel 4.4
Wir betrachten ein französisches Delikatessengeschäft, das von einem Gourmet-Koch betrieben
wird. Samstags vormittags kommen die Kunden entsprechend einem Poisson’schen Ankunftsprozess mit einer mittleren Ankunftsrate von 10 Personen pro Stunde. Sie werden nach der
FIFO-Disziplin bedient und sind – da die Reputation des Geschäftes so exzellent ist – bereit,
so lange zu warten, bis sie bedient werden. Die Zeit, einen Kunden zu bedienen, ist dabei
exponentialverteilt mit einer durchschnittlichen Bedienzeit von 4 Minuten. Es handelt sich um
ein M |M |1-System mit
• λ = 10 Personen pro Stunde =
1
6
[Personen pro Minute]
46
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
• µ = 1 Person pro 4 Minuten =
1
4
[Personen pro Minute].
Die Verkehrsintensität des Geschäftes ist ̺ = 32 , d. h. das Geschäft, als Wartesystem betrachtet,
ist stabil. Es existieren somit stationäre Zustandswahrscheinlichkeiten. Wir haben:
• Durchschnittliche Anzahl von Kunden im Geschäft (im stationären Zustand):
E(L) =
2·3
̺
=
= 2 [Personen]
1−̺
3·1
• Durchschnittliche Anzahl der Kunden in der Warteschlange (im stationären Zustand):
E(N ) =
̺2
4·3
4
=
=
1−̺
9·1
3
[Personen]
• Durchschnittliche Verweilzeit eines Kunden im Geschäft (im stationären Zustand):
E(V ) =
1
=
µ−λ
1
4
1
−
1
6
=
24
= 12
2
[Minuten]
• Durchschnittliche Wartezeit eines Kunden im Geschäft (im stationären Zustand):
E(W ) =
2 · 24
̺
=
= 8 [Minuten]
µ−λ
3·2
• Die Wahrscheinlichkeit, dass ein Kunde mehr als 30 Minuten im Geschäft verbringt:
30
5
P (V ≥ 30) = e− 12 = e− 2 ≈ 0, 0821.
Interpretation: durchschnittlich sind ca. 8 % der Kunden länger als 30 Minuten im Geschäft
• Die Wahrscheinlichkeit, dass ein Kunde weniger als 6 Minuten auf seine Bedienung warten
muss:
6
1
2
2
P (W ≤ 6) = 1 − · e− 12 = 1 − · e− 2 ≈ 0, 596.
3
3
Interpretation (Pasta): Für durchschnittlich ca. 60 % der Kunden startet die Bedienung
innerhalb von 6 Minuten nach ihrer Ankunft.
Beispiel 4.5
In einem M |M |1 - Wartesysteme erfolgt der Eingang der Aufträge gemäss eines Poisson’schen
Ankunftsprozesses mit Intensität λ = 4. Der Betreiber der Bedienstation hat die Möglichkeit,
die Geschwindigkeit der Auftragsbearbeitung durch geeignete technische Massnahmen an der
Bedienstation zu beeinflussen. Allerdings entstehen ihm –abhängig von der eingestellten Bedienrate µ– Kosten in Höhe von Kµ = 5 · µ GE. Eine weitere Kostenkomponente KW hat er zu
beachten, welche durch das Warten der Auftrage in der Warteschlange entsteht und die sich
als proportional zur mittleren Wartezeit E(W ) erweist. (KW = 6 · E(W )) GE.
Der Betreiber will die Bearbeitungsgeschwindigkeit an der Bedienstation so einstellen, dass die
erwarteten Gesamtkosten K = Kµ + KW möglichst klein sind. Wie ist dazu µ zu wählen?
47
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
4.4 Little’sche Formeln oder Little’sches Gesetz
Die Darstellungen E(L) = λ·E(V ) in (v) bzw. E(N ) = λ·E(W ) in (vi) werden in der Literatur
auch als „Little’sche Formeln“ oder als das „Little’sche Gesetz “bezeichnet (siehe dazu [23]):
„Durchschnittliche Anzahl der Kunden im System“ =
„Kunden-Ankunftsrate mal durchschnittliche Verweilzeit eines Kunden“.
bzw.
„Durchschnittliche Anzahl der Kunden in der Wartschlange“ =
„Kunden-Ankunftsrate mal durchschnittliche Wartezeit eines Kunden“.
Diese Little’sche Formeln gelten allgemein, sofern sich ein technisch-ökonomisches Wartesystem
im Gleichgewichtszustand befindet. Sie sind unabhängig von Annahmen über Verteilungen von
Zwischenankunftszeit bzw. Bedienzeit.
Zur Herleitung etwa der Formel E(L) = λ · E(V ) betrachte man das Intervall [0, t0 ]. Dann
beträgt die „Mittlere Kunden-Ankunftsrate“ in diesem Zeitraum
α(t0 )
.
t0
λ̄t0 =
Definieren wir eine Funktion Vi : T → [0, 1] mit
Vi (t) =
(
1, t ∈ [Ti , ϑi ]
0, sonst,
die für jeden Zeitpunkt t angibt, ob sich der i-te Kunde im System befindet oder nicht, dann
erhält man durch
Z
n0
X
t0
i=1 0
Vi (t)dt
die Summe der Verweildauern aller Kunden bis zum Zeitpunkt t0 , wobei mit n0 die Gesamtzahl
aller bis t0 beobachteten Kunden gemeint ist.
Bezeichnet man als V̄t0 die durchschnittliche Verweildauer eines jeden Kunden bis zum Zeitpunkt t0 , so gilt mit dem vorher Gesagten, dass
V̄t0 =
n0 Rt0
P
i=1 0
Vi (t)dt
.
α(t0 )
Andererseits gilt für die durchschnittliche Anzahl der Kunden L̄t0 im System bis zum Zeitpunkt
t0 , dass
L̄t0 =
Rt0
0
48
Lt dt
t0
.
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Die Zähler der beiden vorhergehenden Ausdrücke stimmen nun aber überein. , d. h.
t0
γ(t0 ) :=
n0 Z
X
Vi (t)dt =
i=1 0
Zt0
Lt dt.
0
Die beiden Zähler beschreiben nämlich jeweils die Summe der Verweilzeiten aller Kunden, die
bis zum Zeitpunkt t0 eingetroffen sind. Dass dies so ist, verdeutlicht die Abbildung 4.1. Die
Integrale (also die Flächeninhalte) stimmen überein, sie werden nur „unterschiedlich“ berechnet.
P R t0
i 0
R t0
Vi (t)dt
0
t0
Lt dt
t0
t
Abbildung 4.1: Darstellung für
P Rt0
i
0
Vi (t)dt bzw.
Rt0
0
t
Lt dt
Man erhält somit also insgesamt
L̄t0 =
Rt0
0
Lt dt
t0
γ(t0 )
α(t0 γ(t0 )
=
=
·
= λ̄t0 ·
t0
t0
α(t0 )
n0 Rt0
P
i=1 0
Vi (t)dt
α(t0 )
= λ̄t0 · V̄t0 .
Nun betrachtet man einen „sehr langen“ Zeitraum (d. h. t0 → ∞). Dann erhält man also für
t → ∞:
L̄t0
V̄t0
λ̄t0
→ E(L)
→ E(V )
→ λ
und konsequenterweise:
E(L) = λ · E(V ).
Die Formel (iv) lässt sich auch intuitiv klar machen:
Auch während der durchschnittlichen Aufenthaltszeit E(V ) eines „durchschnittlichen Kunden“
im Wartesystem kommen die Neukunden mit Rate λ an. D. h. am Ende von E(V ) Zeiteinheiten
können λ · E(V ) Neukunden erwartet werden. Das wiederum heißt, dass dieser „durchschnittliche Kunde“ vom Zeitpunkt seines Eintritts in das System bis zum Zeitpunkt seines Austritts
(er hat dann also E(V ) Zeiteinheiten im System verbracht) erwarten kann, λ · E(V ) Kunden
im System vorzufinden: E(L) = λ · E(V ) (Pasta!!).
49
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
4.5 Ein M|M|1-System mit einer (speziellen) Prioritätsbedienung
Wir betrachten hier ein M |M |1-System mit zwei verschiedene Klassen von Kunden . Beide
Typen von Kunden kommen jeweils entsprechend einem Poisson’schen Ankunftsprozess mit
Rate λ1 bzw. λ2 am System an. Die Ankünfte sind voneinander unabhängig. Die mittlere Bedienzeit E(S) ist für beide Kunden dieselbe und ist durch den Parameter µ bestimmt.
Ankommende Kunden werden (prinzipiell) nach der FIFO-Regel bedient, allerdings werden
Typ 1-Kunden gegenüber den Typ 2-Kunden in folgendem Sinne bei der Bedienung priorisiert:
Prioritätsregel: Typ 1-Kunden werden stets vor Typ 2-Kunden bedient. Findet ein Kunde des Typs 1 bei seiner Ankunft die Situation vor, dass gerade ein Kunde des Typs 2 bedient
wird, so wird diese Bedienung sofort unterbrochen und der Typ 1-Kunde wird bedient. Erst
wenn sich kein Typ 1-Kunde mehr im Wartesystem befindet, erfolgt die „Restbedienung“ des
Kunden vom Typ 2.
Um für dieses System eine Reihe von Kenngrössen zu ermitteln, überlegen wir Folgendes:
Da die Prioritätsregel die Bedienungsunterbrechung für Typ 1-Kunden fordert, gibt es aus
Sicht der Typ 1-Kunden, Kunden vom Typ 2 gar nicht. Für die Kundenklasse 1 können also
(1)∗
die zugehörige stationären Verteilung (pi )i∈N0 und sämtliche sonstigen charakteristischen
Kenngrössen aus Satz 4.2 unmittelbar mit den Parametern λ1 und µ gewonnen werden. Beschreiben L(i) und V (i) , i = 1, 2 die Anzahl bzw die Verweilzeit der Kunden vom Typ i im
System im stationären Zustand, so ist dann bspw.
E(L(1) ) =
̺1
1 − ̺1
und
E(V (1) ) =
1
.
µ · (1 − ̺1 )
Mit dem Satz 2.18 wissen wir auch, dass die Ankünfte sämtlicher Kunden (Typ 1 und Typ 2) am
System ebenfalls durch einen Poisson’schen Ankunftsprozess mit dem Parameter λ = λ1 + λ2
beschrieben wird. Also ist
λ
λ1 + λ2
̺= =
= ̺1 + ̺2 ,
µ
µ
d.h. die Gesamtverkerhsintensität setzt sich additiv aus den beiden eizelnen Verkehrsintensitäten zusammen.
Wegen der Gedächtnislosigkeit der Exponentialverteilung ist die „Restbedienungszeit“ des
Kunden von Typ 2 ebenfalls exponentialverteilt (mit Parameter µ). Daher hängt die Anzahl L(2) der Kunden von Typ 2 im System nicht von der Reihenfolge ihrer Bedienung ab.
Mit L = L(1) + L(2) ergibt sich für die erwartet Anzahl E(L(2) ) der Kunden von Typ 2 im
System:
E(L(2) ) = E(L) − E(L(1) ) =
̺1
̺2
̺1 + ̺2
−
=
.
1 − (̺1 + ̺2 ) 1 − ̺1
(1 − ̺1 ) · (1 − ̺)
Mit der Little’schen Formel folgt dann für die durchschnittliche Verweildauer E(V (2) ) eines
Kunden von Typ 2:
1
E(L(2) )
=
.
E(V (2) ) =
λ2
µ · (1 − ̺1 ) · (1 − ̺)
50
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Wegen E(W (i) )+E(S) = E(V (i) ) ermittelt man darüber hinaus die durchschnittliche Wartezeit
E(W (2) ) eines Kunden vom Typ 2 durch:
E(W (2) ) = E(V (2) ) −
1
.
µ
Für die durchschnittliche Anzahl E(N (2) ) wartender Kunden vom Typ 2 ergibt sich damit
dann mit der Little’schen Formel:
E(N (2) ) = λ2 · E(W (2) ).
Übung:
Stellen Sie sich nun vor, dass die obige Prioritätsregel für die Bedienung folgendermassen
abgeändert wird:
Prioritätsregel modifiziert: Typ 1-Kunden werden stets vor Typ 2-Kunden bedient. Findet
ein Kunde des Typs 1 bei seiner Ankunft die Situation vor, dass gerade ein Kunde des Typs 2
bedient wird, so wird diese Bedienung zuerst beendet und danach der Typ 1-Kunde bedient.
Aufgabe: Bestimmen Sie bitte für diesen Fall E(L(i) ) und E(V (i) ), i = 1, 2.
4.6 Der Austrittsprozess; Burke’sches Gesetz
Nun interessieren wir uns für den „Austrittsprozess“ in einem M |M |1-System. Kenntnisse über
diesen Autrittsprozess sind bei der Analyse von Wartesystemen deshalb von grundsätzlicher
Bedeutung, weil der Austrittsprozess des einen System oft den Ankunftsprozess für ein unmittelbar darauf folgendes Wartesystem darstellt, in welches der im ersten System bediente
Kunde eintritt bzw. eintreten muss.
Für eine solche Analyse betrachten wir dazu einen beliebigen Zeitpunkt t0 zu welchem ein
Kunde aus den M |M |1-System ausgetreten ist, (o. B. d. A. sei hierbei t0 = 0) und wollen
untersuchen, was sich über den Zeitraum sagen lässt, der vergeht bis der nächste Kunde austritt
(Zwischenaustrittszeit).
Es sei d die Zufallsvariable, die den Zeitpunkt beschreibt, zu dem der nächste Kunde das System
verlässt. Dann können die folgenden beiden Situationen beobachtet werden, je nachdem welchen
Wert die Zufallsvariable Lt0 = L0 , („Anzahl der Kunden im System zum Zeitpunkt t0 = 0“)
annimmt:
• L0 = 0: in diesem Fall gilt d = τ + S.
• L0 > 0: in diesem Fall ist d = S.
Damit ergibt sich für die Wahrscheinlichkeit, dass der Austritt des nächsten Kunden innerhalb
der kommenden h Zeiteinheiten stattfindet:
P (d1 ≤ h) = p0 · P (τ + S ≤ h) + (1 − p0 ) · P (S ≤ h).
51
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Da τ exponentialverteilt mit Parameter λ und S exponentialverteilt mit Parameter µ ist,
kennen wir für beide Verteilungen die Dichten angeben (siehe Kap. 2.3). Da weiterhin die die
Zwischenankunftszeiten von den Bedienzeiten unabhängig sind, lässt dann nämlich die Dichte
von τ + S über die Faltung der beiden Dichtefunktionen fτ und fS bestimmen und auf diese
Weise P (τ + S ≤ h) zu berechnen.
Mit den Dichten fτ (t) = λ · e−λt bzw. fS (t) = µ · e−µt machen wir von dem Faltungssatz 2.26
aus Kapitel 2.4 Gebrauch und erhaltenb nach Berechnen des Faltungsintegrals:
fτ +S (t) =
Z
∞
−∞
fτ (t − s) · fS (s)ds =
µ·λ
· (e−µt − e−λt ).
λ−µ
Nun setzen wir, unter Beachtung, dass p0 = 1 − ̺ = 1 − µλ , an:
fd (t) = p0 · fτ +S (t) + (1 − p0 ) · fS (t)
= (1 − ̺) · fτ +S (t) + ̺ · fS (t)
λ
µ · λ −µt
λ
· e
− e−λt + · µ · e−µt
·
=
1−
µ
λ−µ
µ
λ
µ − λ µ · λ −µt
·
· e
− e−λt + · µ · e−µt
=
µ
λ−µ
µ
−µt
−λt
−µt
= −λ · (e
−e )+λ·e
= λ · e−λt .
Offenbar ist also fd (t) gerade die Dichte einer Exponentialverteilung mit dem Parameter λ.
Also gilt
P (d ≤ t) = 1 − e−λt ,
d. h. d als Austrittszeitpunkt ist exponentialverteilt mit Parameter λ. Daraus schließen wir,
dass die Zwischenaustrittszeiten exponentialverteilt sind mit Parameter λ (siehe Kap. 2.3).
Dieses Resultat ist als Satz von Burke oder Burkes Gesetz (siehe [9]) bekannt:
Satz 4.6
Gegeben sei ein M |M |1-System mit den Parametern λ und µ.
Dann ist der Austrittsprozess (δt )t∈T Poisson-verteilt mit Parameter λ.
Bemerkung 4.7
• Dieses Ergebnis erscheint zunächst überraschend, da tatsächlich Austritte mit Rate µ
(statt mit Rate λ) zu beobachten sind, sofern im Wartesystem bedient wird, d.h. sofern
sich mindestens ein Kunde darin befindet (L0 = i > 0). Allerdings wird ja nicht immer
bedient (falls L0 = 0). Die Grund, dass im stationären Zustand der Poisson-Prozess
der Austritte den Parameter λ besitzt, liegt also darin, dass die Länge der einzelnen
Bedienungsperioden (also die Zeitspannen, in denen Bedienstationen arbeiten bzw. nicht
arbeiten) und der Austrittsprozess von diesen Perioden nicht unabhängig ist.
52
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
• Das Ergebnis besagt weiterhin, dass wir bei ausschließlicher Betrachtung des Austrittsprozesses (etwa in einem M |M |1-System) zwar Aussagen über λ erhalten, aber nichts über
die Bedienrate µ erfahren.
• In der obigen Überlegung wurde die Größe µ1 bei der Ermittlung von fd1 (t) „eliminiert“.
Man kann nun zeigen, dass dies auch der Fall ist, wenn die Größe µ1 nicht konstant,
(1)
sondern möglicherweise abhängig vom Zustand L0 = j ist, also µ1 = µ1 (j). In jedem
Fall fällt diese Größe bei der Ermittlung von fd1 (t) heraus.
Dies hat zur Konsequenz, dass auch für den Fall, dass das Wartesystem v1 ein System
vom Typ M |M |m ist, der Austrittsprozess exponentialverteilt mit Parameter λ1 ist.
Der Satz von Burke gilt also allgemeiner, als oben formuliert.
53
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
4.7 Eine (elementare) Supply Chain als M|M|1-Wartesystem
Im Folgenden wollen wir ein M |M |1-Wartesystem dazu heranziehen, um eine Verhandlungssituation zwischen einem Produzenten und einem Vorlieferanten innerhalb einer Supply Chain
(„Lieferkette“) zu beschreiben, diese zu untersuchen und mit ihr zu „experimentieren“ (vgl.
dazu [15]).
Wir betrachten die folgende Situation:
Vorlieferant
Hersteller
Endverbraucher
In diesem Supply Chain System fragt der Endverbraucher beim Hersteller die Lieferung
eines bestimmten Gutes (z.B. Fahrrad) zum Preis von π pro Stück nach. Der Hersteller selbst
hat dieses Produkt zu Kosten von cH pro Stück gefertigt (zusammengebaut). Es wird angenommen, dass die Nachfragen der Endverbraucher zufällig und einzeln beim Hersteller gemäß
eines Poisson-Prozesses mit Ankunftsrate λ eingehen. Der Hersteller verfügt über ein Lager
der Kapazität KI . Die Lagerhaltungskosten betragen cI pro Stück, die Fehlmengenkosten, die
entstehen, wenn der Hersteller nicht sofort an einen Endverbraucher ausliefern kann, belaufen
sich auf cF pro Stück.
Eine eingehende Kundennachfrage wird – sofern möglich – aus dem Lager des Herstellers befriedigt.
Nach Eingang einer Kundennachfrage ordert der Hersteller bei dem Vorlieferanten unmittelbar die nötigen Komponenten nach, die notwendig sind, um wiederum einen Ersatz für das
nachgefragte Produkt bei sich fertigen.
Wir gehen davon aus, dass die Fertigungen der Komponenten beim Zulieferer einzeln erfolgen
und deren Produktionszeit S exponential-verteilt ist. Die durchschnittliche Fertigungsdauer
betrage E(S) = µ1 .
Die reinen Produktionskosten des Vorlieferanten betragen cV pro Komponentenset, er verkauft
ein solches Set an den Hersteller zum Preis von πV .
Die Lieferzeit der Komponenten vom Vorlieferanten(= Zeit zwischen Aufgabe der Order an
den Vorlieferanten und Auslieferung des bestellten Komponentenset an den Hersteller) ist eine
zentrale Grösse in dieser Supply Chain, da sie letztlich als Maß für den „Lieferservice“ des
Herstellers gegenüber dem Endverbraucher angesehen werden kann:
je später/früher die Komponenten beim Vorlieferanten gefertigt sind, umso später/früher kann
kann dieser die Komponenten an den Hersteller liefern und umso später/früher kann dieser
wiederum die Kundennachfrage befriedigen (bzw. das Lager wieder auffüllen).
Der Hersteller ist an einem hohen Lieferservice seines Vorlieferanten interesseirt, also an einer
kurzen Lieferzeit. Daher besteht sein Wunsch darin, vom Vorlieferanten ein „grosses“ µ einzufordern.
Der Vorlieferant ist hingegen nicht unbedingt an einer kurzen Lieferzeit interessiert, da er vielleicht auch andere Unternehmen beliefert und die Garantie einer kurzen Lieferzeit für ihn mit
zusätzlichen Kosten verbunden ist (also sein Wunsch: µ eher “klein“).
Um diesen „Konflikt“ zwischen Hersteller und Vorlieferant zu verringern und ggf. einen Kompromiss für die gegensätzliche Interessenlage zu finden, ist der Hersteller bereit, sich einen
54
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
„guten Lieferservice“ etwas kosten zu lassen, natürlich nicht zu jedem Preis.
Die Grösse
T (λ, µ, KI )
soll eine solchen Zahlung beschreiben, welche der Hersteller an den Vorlieferanten für die Garantie eines bestimmten “Service-Levels“ µ zu leisten bereit ist.
Um nun zwischen Hersteller und Vorlieferant entsprechende Vertragsverhandlungen über die
durchschnittliche Lieferzeit (das heisst über die Grösse µ) aufnehmen zu können, sollen die
erwarteten Erträge der beiden Beteiligten ermittelt werden, welche sich unter diesen Bedingungen ergeben.
Vor allem interessiert dabei natürlich, wie diese von µ abhängen.
Um eine derartige Analyse durchzuführen, wollen wir die Situation als als |M |M |1 Wartesystem
auffassen.
Wir begreifen in einem solchen System die „Kunden“ als die einzelnen Order des Herstellers
an den Vorlieferanten ihm die Komponenten zu liefern.
Den Vorlieferanten interpretieren wir als die Bedienstation. Eine Order erreicht das Wartesystem daher ebenfalls mit Ankunftsrate λ und wird vom Vorlieferanten mit Rate µ bedient.
Die Grösse L beschreibe„die Anzahl der Order im stationären Zustand“. Diese Grösse L ∈ {j =
0, 1, . . .} entspricht auch genau der Anzahl der Nachfragen der Endverbraucher beim Hersteller
(im stationären Zustand).
Der folgende Graph verdeutlicht die Zustände bzw. die einzelnen Übergänge für die in diesem
Fall interessierende Größe I = KI − j, den Lagerbestand, der natürlich von L abhängt:
λ
KI
λ
KI −1
µ
λ
λ
...
KI −2
µ
...
µ
...
λ
0
λ
...
−1
µ
µ
...
µ
...
Für die stationären Zustandswahrscheinlichkeiten haben wir dann mit Satz 4.2:
P (I = KI − i) = P (L = i) = p∗i = ̺j · (1 − ̺)
für i = 0, 1, . . .
Für die erwartete Anzahl von Ordern beim Vorlieferanten ergibt sich
E(L) =
∞
X
i=0
j · ̺i · (1 − ̺) =
̺
.
(1 − ̺)
Sofern eine Kundennachfrage nicht unmittelbar befriedigt werden kann, also eine Fehlmenge
entsteht liegt der Fall I = KI − i ≤ 0 vor. In einem solchen Fall kommen auf den Hersteller
die Fehlmengenkosten cF pro Stück zu. Offenbar gilt
P (I ≤ 0) = P (KI − L ≤ 0) = P (L ≥ KI ) =
55
∞
X
j=KI
̺j · (1 − ̺).
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Damit ergibt sich für die zu erwartende Fehlmenge E(R) :
E(R) =
∞
X
j=KI
(j − KI ) · ̺j · (1 − ̺) =
̺KI +1
.
(1 − ̺)
Für die zu erwartende Größe des „tatsächlichen“ Lagerbestandes (E(I|I ≥ 0)) ergibt sich
(unter Benutzung von Formeln für die Partialsumme geometrischer Reihen):
E(I|I ≥ 0) =
KI
X
i=0
(KI − j) · p∗i = (1 − ̺) · KI ·
KI
X
j=0
̺j −
KI
X
i=0
i · ̺i
1 − ̺KI +1 KI · ̺KI +2 − (KI + 1) · ̺KI +1 + ̺
= (1 − ̺) · KI ·
−
1−̺
(1 − ̺)2
= KI − KI · ̺KI +1 −
!
KI · ̺KI +2 − (KI + 1) · ̺KI +1 + ̺
(1 − ̺)
Für die zu erwartende Lieferzeit des vom Vorlieferanten produzierten Komponentensets (=
Verweilzeit der Order beim Vorlieferanten bis zu deren Produktionsende) ergibt sich unter
Anwendung der Little’schen Formel (siehe 4.2):
E(V ) =
1
.
(µ − λ)
Für die Funktion GH der (pro Zeiteinheit) zu erwarteten Erträge des Herstellers könnten wir
nun beispielsweise ansetzen:
GH = (π − cH − πV )λ − cI · E(I|I ≥ 0) − cF · E(R)−T (λ, µ, KI ).
Für die zu erwartenden Erträge des Vorlieferanten GV könnte man etwa ansetzen
GV = T (λ, µ, KI ) + (πV − cV ) · λ − cµ · µ.
Die Größe cµ beschreibt hier die zusätzlichen Produktionsstückkosten, die dem Vorlieferanten
dadurch entstehen, dass er das Servicelevel µ garantiert.
Die Größen cH , cI , cF und KI i.A. ausschließlich dem Hersteller bekannt sind. Der Vorlieferant
kennt natürlich „seine Größen“ cV und cµ , welche der Hersteller i.A. wiederum nicht kennt. Beiden bekannt sind die Größen λ und π. Die Erträge beider Beteiligten werden jeweils essentiell
durch λ, µ, KI und T (λ, µ, KI ) beeinflusst.
In den Verhandlungen zwischen Produzent und Vorlieferant wird es im Wesentlichen darum
gehen, welche Zahlung T (λ, µ, KI ) für welchen Servicelevel µ vereinbart wird, damit beide an
der Supply Chain Beteiligten „hinreichend grosse, positive“ Erträge GV , bzw. GH erwarten
können.
Übung: Erstellen Sie bitte ein geeignetes EXCEL-Blatt und „experimentieren“ Sie hierin.
56
4 Das Wartesystem M |M |1
OR II c, Master-Modul IV
Setzen Sie dazu zunächst Kostengrössen cV , cµ , cH , cI , cF und Preise πV , π sinnvoll fest und
definieren eine Ankunftsrate λ bzw. die Lagerkapazität KI .
Ermitteln Sie jeweils die Wirkung einer Veränderungen der Grösse µ auf die entsprechenden
Ertragsgrößen GV bzw. GH der beiden an der Supply Chain Beteiligten. Überlegen Sie sich
dazu auch verschiedene Ansätze für eine mögliche Struktur der Funktion T , also etwa
T (λ, µ, S) = max{0, c1 · (µ − λ)},
oder, alternativ die etwas kompliziertere Kostenfunktion
T (λ, µ, S) = max{0, c1 · µ2 − c2 · λ + c3 ·
1
}
KI
Hierin sind c1 , c2 , c3 geeignet festzulegen.
Machen Sie insbesondere jeweils „Verhandlungsvorschäge“ für die Größen µ und T (λ, µ, KI ).
57
5 Markov-Ketten als Instrumente zur
Modellierung technisch-ökonomischer
Wartesysteme
Bei der Untersuchung eines technisch-ökonomischen Wartesystems vom Typ M |M |1 hatten
wir bereits intuitiv festgestellt, dass sowohl für den Ankunftsprozess (αt )t∈T als auch für den
Bedienprozess (δt )t∈T galt, dass dessen zukünftige Entwicklung nur von der Kenntnis der Gegenwart, nicht aber von der Kenntnis der Vergangenheit abhing. Dies war im Wesentlichen
eine unmittelbare Konsequenz aus der Exponentialverteilung von Zwischenankunftszeiten und
Bedienzeiten. Ebenso war es bei dem Beispiel der Ski-Fahrer und des Tellerliftes. Hier erwies
sich, dass die Länge der Warteschlange der am Tellerlift wartenden Skifahrer zum Zeitpunkt
k + 1 nur von der Länge der Warteschlange zum Zeitpunkt k und der zufällig ankommenden
Anzahl neuer Skifahrer Xk+1 abhing, nicht jedoch von Ereignissen, die vor dem Zeitpunkt
k stattfanden. Eine derartige Eigenschaft hatten wir „Markov-Eigenschaft“ bzw. „Gedächtnislosigkeit“ genannt. Viele Prozesse innerhalb technisch-ökonomischer Wartesysteme haben
diese Eigenschaft, so dass es sinnvoll ist, Prozesse mit der Markov-Eigenschaft nun genauer
zu untersuchen. Es erweist sich dabei, dass diese Prozesse nicht nur von theoretischer Bedeutung sind, sondern auch für die Praxis „Rezepte“ liefern, wie auch kompliziertere als M |M |1
Wartesysteme modelliert werden können. Beispiele für solche komplizierteren Systeme sind
etwa:
• M |M |m
• M |M |m|K
• M |M |m|0
• M |M |m|K und „ungeduldige“ Kunden
• M |M |m|K und „zustandsabhängige“ Bedienzeiten
• Wartesystem mit „Gruppenbedienungen“
• Wartesysteme mit Prioritätsklassen
• „Netzwerke“ von Wartesystemen der obigen Arten
Wir erinnern uns, dass wir beim M |M |1-System wir
(Lt )t∈[0,∞[
als den für uns wichtigen stochastische Prozess identifiziert hatten und für die interessierenden
Kenngrössen des Systems die Zufallsvariable
L
sowie deren Verteilung
58
p∗ = (p∗0 , p∗1 , . . . , )
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
abgeleitet hatten. Wesentliches Hilfsmittel dabei war der Digraph auf Seite 39, aus dem wir
Informationen über die möglichen Übergänge von L und deren Wahrscheinlichkeit „ablesen“
konnten,
Wir werden nun sehen, dass wir uns anhand so genannter Markov-Ketten – ähnlich wie beim
Wartesystem vom Typ M |M |1 – das Verhalten von uns interessierenden Grössen mittels eines
bewerteten Digraphen, dem sog. Markov-Graphen, klarmachen können, aus dem wir dann wie
beim M |M |1-System auch schon
• die Verteilung für den stochastischen Prozess,
• die Verteilung für den Prozess nach dem „Einschwingen“ des Systems und
• daraus resultierende Kenngrößen zur Beschreibung der Effizienz/ Effektivität des Wartesystems
ablesen bzw. herleiten können.
Dazu betrachten wir einen stochastischen Prozess (Xt )t∈[0,∞[ , bei dem die Zufallsvariablen Xt
Werte auf einer höchstens abzählbaren Menge I annehmen. Die einzelnen Werte in I werden
wir Zustände nennen. Später wollen wir derartige „Zustände“ in unseren Wartesystemen beobachten und beschreiben, bspw. die Zustände „ein Kunde ist im System“, „zwei Kunden sind
im System“ ,... oder etwa die Zustände “eine Bedienstation hat geöffnet und zwei Kunden sind
im System “, „zwei Bedienstationen haben geöffnet und 7 Kunden sind im System“,...
5.1 Homogene Markov-Ketten mit stetiger Zeit, stationäre
Markov-Ketten
Zunächst wollen wir uns klarmachen, was eine Markov-Kette überhaupt ist.
Definition 5.1
Ein stochastischer Prozess (Xt )t∈[0,∞[ mit Zufallsvariablen Xt : Ω → I ⊂ N0 heißt MarkovKette (mit stetiger Zeit), falls für k beliebig ausgewählte Zeitpunkte t1 < t2 < . . . < tk ∈ T
und beliebig ausgewählte Zustände x1 , . . . , xk ∈ I die Markov-Eigenschaft gilt, d. h.
P (Xtk = xk | Xtk−1 = xk−1 , . . . , Xt1 = x1 ) = P (Xtk = xk | Xtk−1 = xk−1 ).
Die bedingten Wahrscheinlichkeiten pij (s, t) := P (Xt = xj | Xs = xi ) heißen Übergangswahrscheinlichkeiten der Markov-Kette.
Als Anfangsverteilung (pi )i∈I bezeichnet man die Verteilung der Zufallsvariablen X0 , d. h.
der Zufallsvariablen des stochastischen Prozesses zum Zeitpunkt t = 0.
(Die bedingten Wahrscheinlichkeiten pij (s, t) hängen also nur vom „zuletzt beobachteten“ Zustand xk−1 ab, nicht von der weiteren „Vorgeschichte“) Salopp: In „Markov-Ketten hängt,
59
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
die Zukunft nur von der Gegenwart, nicht von der Vergangenheit ab“. Die Anfangsverteilung
(pi )i∈I ist offenbar gegeben durch pi := P (X0 = xi ) für i ∈ I.
Beispiel 5.2
(i) Ein Poisson’scher Ankunftsprozess (αt )t∈[0,∞[ ist eine Markov-Kette.
(ii) In einem M |M |1-System betrachten wir den stochastischen Prozess (Lt )t∈T , wobei Lt
der Anzahl der Kunden im Wartesystem zum Zeitpunkt t entspricht, Lt : Ω → N0 . Nun
fixieren wir einen festen Zeitpunkt t0 . Dann wissen wir bereits aus dem letzten Kapitel:
a) Berücksichtigt man nur Ankünfte der Kunden für t ≥ t0 , so ist der Verlauf des
Prozesses (Lt )t∈T für t ≥ t0 unabhängig vom Verlauf des Prozesses für t < t0 .
b) Der durch die Austritte aus dem System bedingte Verlauf des Prozesses für t ≥ t0
ist abhängig von
• der Anzahl der Kunden im System zum Zeitpunkt t0 ,
• der Zahl der Bedienungen für t ≥ t0 ,
nicht jedoch von der Anzahl der Bedienungen der Kunden für t ≤ t0 .
Da die Anzahl der Bedienungen auch unabhängig vom Ankunftsprozess (αt )t≤t0 ist, hängt
insgesamt der Verlauf des stochastischen Prozesses (Lt )t∈T für t > t0 nur von Lt0 ab,
nicht jedoch von Lt (für t < t0 ). (Lt )t∈T ist also wie (αt )t∈T eine Markov-Kette.
Bemerkung 5.3
a) Derartige Überlegungen sind bei der Analyse von technisch-ökonomischen Wartesystemen
stets anzustellen, um zu plausibilisieren, ob es sich bei zu untersuchenden stochastischen
Prozessen um Markov-Ketten handelt.
b) Im Folgenden wollen wir der Übersichtlichkeit halber nicht mehr von „Zustand xi “ sprechen, sondern von „Zustand Nr. i“. Wir identifizieren also den Zustand xi mit seinem
Index i.
c) Kennt man die Verteilung (pi (s))i∈I , das heißt eine Verteilung pi (s) = P (Xs = i) für
alle Zustände mit der Nr. i mit i ∈ I, und die Übergangswahrscheinlichkeiten pij (s, t),
so kennt man die Verteilung der Markov-Kette zu jedem beliebigen Zeitpunkt t, da nach
der Formel der totalen Wahrscheinlichkeit (2.1) auf Seite 12 gilt:
pj (t) = P (Xt = j) =
=
X
i∈I
P (Xt = j | Xs = i) · P (Xs = i)
i∈I
pij (s, t) · pi (s).
X
Für die Untersuchung allgemeinerer Wartesysteme sind nun spezielle Markov-Ketten von großer
Bedeutung, weil sie oft eine „einfache Berechnung“ von Verteilungen zulassen.
60
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
Definition 5.4
Eine Markov-Kette (Xt )t∈[0,∞[ heißt homogen, falls die Übergangswahrscheinlichkeiten
pij (s, t) = P (Xt = j | Xs = i)
nur von der Differenz (t − s) und nicht von s und t selbst abhängen. Man schreibt dann
pij (s, t) = pij (t − s).
„Homogenität“ besagt, dass die Wahrscheinlichkeit eines Übergangs von Zustand Nr. i in den
Zustand Nr. j während des Zeitintervalls [s, t] nicht von der Lage des Intervalls innerhalb eines
Betrachtungszeitraums abhängt.
Beispiel 5.5
Ein Poisson’scher Ankunftsprozess (αt )t∈[0,∞[ mit Intensität λ in einem Wartesystem beschreibt eine homogene Markov-Kette. Dann erhält man für j ≥ i
pij (s, t) = P (αt = j | αs = i)
= P (αt − αs = j − i)
= P (Im Intervall [s, t] gibt es j − i „Neu-Kunden“)
(λ · (t − s))j−i −λ(t−s)
·e
=
(j − i)!
= P (αt−s = j | α0 = i)
= pij (0, t − s).
Bei homogenen Markov-Ketten kann man also für einen festen Zeitraum h die Übergangswahrscheinlichkeiten pij (h) := pij (0, h) in einer (möglicherweise unendlich grossen) Übergangsmatrix P (h) := (pij (h))i∈I,j∈I zusammenfassen, d. h.
P (h) =
p00 (h) p01 (h) p02 (h)
p10 (h) p11 (h) p12 (h)
p20 (h) p21 (h) p22 (h)
..
..
..
.
.
.
···
···
···
..
.
.
Schreibt man zudem die Wahrscheinlichkeiten pj (t) = P (Xt = j) für alle j ∈ I als (möglicherweise unendlichen) Spaltenvektor p(t) auf, so gilt nach dem eben Gesagten, dass
pj (t) =
=
X
i∈I
P (Xt = j | Xs = i) · P (Xs = i)
i∈I
pij (t − s) · pi (s)
X
und man erhält p(t) = (P (t − s))T · p(0) und speziell für den Fall, das s = 0
p(0) = (P (0))T · p(0).
61
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
Die Bedeutung einer homogenen Markov-Kette liegt darin, dass ihr stochastisches Verhalten
nur von der Verteilung zu Beginn, d. h. durch den Vektor (pi (0))i∈I und durch die Matrix
(pij (t))i,j∈I = P (t) „gesteuert“ wird. Je nach der Verteilung zu Beginn (s = 0) entwickeln sich
bei gleicher „Übergangsmatrix“ P (t) die entsprechenden stochastischen Prozesse unterschiedlich.
Wie wir schon bei der Untersuchung der technisch-ökonomischen Wartesysteme vom Typ
M |M |1 gesehen haben, können sich bestimmte stochastische Prozesse (Xt )t∈T häufig in einen
stationären Zustand einschwingen (steady state). Dies bedeutet, dass der stochastische Prozess
unabhängig von der Zeit t ist, und daher eine Zufallsvariable X diesen stationären Zustand
beschreibt. Dies wollen wir nun etwas genauer untersuchen.
Definition 5.6
Eine Markov-Kette (Xt )t∈[0,∞[ heißt stationär genau dann, wenn die Verteilung von Xt für
t ≥ t0 unabhängig von t ist.
Die Verteilung
p∗ := (p∗i )i∈I , mit p∗i = P (Xt = i) für t ≥ t0
heisst dann stationäre (Anfangs-) Verteilung der Markov-kette.
In diesem Sinne bedeutet Stationarität etwa für t0 = 0, dass
p(t) = p∗ = P T · p∗ für alle t.
5.2 Bestimmung einer stationären Verteilung p∗
Zu einem technisch-ökonomischen Wartesystem betrachten wir eine homogene Markov-Kette
(Xt )t∈[0,∞[ mit stetiger Zeit (z. B. einen Poisson’schen Ankunftsprozess (αt )t∈[0,∞[ oder etwa
die Größe (Lt )t∈[0,∞[ ). Es beschreiben wieder pij (h) := P (Xt+h = j | Xt = i) die Übergangswahrscheinlichkeiten.
Wir machen folgende, einerseits formale, andererseits aber auch realitätsnahe generelle Voraussetzung:
lim pii (h) = 1 für alle i ∈ I.
hց0
Diese Annahmne bedeutet, dass die Markov-Kette Xt bei „Start zum Zeitpunkt t im Zustand
Nr. i“ eine kurze Zeit später (t + h) immer noch (d. h. mit Wahrscheinlichkeit 1) im Zustand
Nr. i verbleibt, also nicht sofort in einen anderen Zustand, etwa Zustand Nr. j, „springt“.
Dann hat man für i 6= j wegen 0 ≤ pij (h) ≤
P
k∈I,k6=i
pik (h) = 1 − pii (h) unmittelbar:
lim pij (h) = 0 für alle i, j ∈ I, i 6= j.
hց0
Man kann in diesem Fall sogar zeigen, dass die Ableitungen:
62
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
(i) lim
hց0
pij (h)
h
= lim
hց0
und
(ii) lim
hց0
1−pii (h)
h
pij (h)−0
h
= lim
hց0
= lim
hց0
pii (0)−pii (h)
h
pij (h)−pij (0)
h
OR II c,
= p′ij (0) =: qij
= −p′ii (0) =: qi
existieren. Als „Ableitung“ beschreibt die Grösse qij die von h unabhängige (!) Veränderungsrate der Wahrscheinlichkeit eines Übergangs von Zustand Nr. i in den Zustand Nr. j
(Übergangsintensität von i nach j). D. h. für ein „kleines Zeitintervall der Länge h“ gilt:
pij (h) = qij · h + o(h).
Weiterhin gilt für festes i, dass
damit folgt, dass
X
P
j∈I
p′ij (0) = 0, da
p′ij (0) =
X
j∈I,j6=i
j∈I,j6=i
P
j∈I
pij (h) = 1 für alle h ∈ [0, ∞[. Und
qij = −p′ii (0) = qi .
qi beschreibt also gerade die von h unabhängige Veränderungsrate der Wahrscheinlichkeit,
überhaupt aus dem Zustand i in irgendeinen anderen Zustand zu wechseln. Also anders ausgedrückt, dass
pii (h) = 1 − qi · h + o(h)
für ein kleines Zeitintervall der Länge h.
Bemerkung 5.7
Achtung: Die Größen qij bzw. qi sind selbst keine Übergangswahrscheinlichkeiten, sondern
beziehen sich auf die Veränderungsraten von Übergangswahrscheinlichkeiten.
Beispiel 5.8
Ist (Xt )t∈[0,∞[ ein Poisson-Prozess (z. B. der Ankunftsprozess (αt )t∈[0,∞[ der Kunden, mit Ankunftsrate λ > 0), so ist
pi,i+1 (h)
1
= lim · P (Xt+h = i + 1 | Xt = i)
hց0 h
h
1
1 (λ · h)1 −λh
= lim · P (Xt+h − Xt = 1) = lim ·
·e
hց0 h
hց0 h
1!
= lim λ · e−λh = λ
qi,i+1 =
lim
hց0
hց0
qij
qij
= 0, j ≥ i + 2
= 0, j < i
qi =
X
N0,j6=i
j∈
qij = λ.
Die Veränderungsrate der Wahrscheinlichkeit, vom Zustand Nr. i aus in einen anderen zu gelangen, entspricht also –wie von einem Ankunftsprozess zu erwarten– gerade der Ankunftsrate.
Startet eine homogene Markov-Kette (Xt )t∈[0,∞[ zum Zeitpunkt 0 in einem Zustand Nr. i, so
bleibt sie zunächst eine bestimmte Zeit dort, bis sie zum Zeitpunkt T1 zum ersten Mal in einen
63
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
Zustand Nr. j (j 6= i) springt. Es gilt dann offenbar:
P (T1 > t | X0 = i) = P ((Xs = i) ∧ (s ≤ t) | X0 = i)
k
· t = i, k = 1, 2, . . . , n | X0 = i
= lim P X
n→∞
n
k
k−1
= lim P X
·t =i|X
·t =i
n→∞
n
n
k−2
k−1
·t =i|X
·t =i
·P X
n
n
1
·... · P X
· t = i | X0 = i
n
t
t
· . . . · pii
= lim pii
n→∞
n
n
=
lim
n→∞
|
{z
n-mal
1 − qi ·
n
t
1
+o
n
n
= e−qi ·t .
}
Eine Markov-Kette (mit stetiger Zeit) „verweilt“ somit in jedem Zustand, den sie annimmt,
eine exponentialverteilte zufällige Zeit, wobei der Parameter der Exponentialverteilung den
Wert qi hat.
Diese Charakterisierung des Verhaltens von Markov-Ketten mit stetiger Zeit ermöglicht es, für
derartige stochastischen Prozesse einen so genannten Markov-Graphen zu definieren.
Definition 5.9
Es sei (Xt )t∈[0,∞[ (Xt : Ω → I ⊂ N) eine homogene Markov-Kette. Es sei V = I, d. h. die
Menge der Zustände, die die Markov-Kette annehmen kann. Weiterhin sei
E = {(i, j) | i, j ∈ I, qij > 0, i 6= j} ∪ {(i, i) | i ∈ I}
und
c : E → R, c((i, j)) =
(
qij ,
i 6= j
.
1 − qi , i = j
~ = (V, E, c) der zu (Xt )t∈[0,∞[ gehörige Markov-Graph.
Dann heißt der bewertete Digraph G
Unser Ziel besteht nun darin, aus dem Markov-Graphen einer homogenen Markov-Kette mit
stetiger Zeit stationäre Verteilungen p∗ = (p∗i ) = P (X = i) zu finden. Folgendes Vorgehen
wäre hier sinnvoll:
64
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
Schritt 1: Aufstellen des DGL-Systems:
X
pij (t + h) =
k∈I
X
1
(pij (t + h) − pij (t)) =
h
=⇒
pik (t) · pkj (h)
k∈I,k6=j
X
p′ij (t) =
k∈I,k6=j
pik (t)
pjj (h) − 1
· pkj (h) +
· pij (t)
h
h
(5.1)
qkj · pik (t) − qj · pij (t)
Schritt 2: Berechnen einer Verteilung P (Xt = i) = pi (t) mit Hilfe des DGL-Systems 5.1 und
einer Anfangsverteilung P (X0 = j) =: pj (0):
pj (t) =
⇐⇒
p′j (t) =
=
=
X
i∈I
pi (0) · pij (t)
i∈I
pi (0) · p′ij (t)
i∈I
pi (0) ·
X
X
X
=
X
k6=j
mit der Nebenbedingung
P
i∈I
k∈I,k6=j
X
k∈I,k6=j i∈I
X
qkj · pik (t) − qj · pij (t)
pik (t)pi (0) qkj −
|
{z
pk (t)
}
qkj · pk (t) − qj · pj (t)
X
i∈I
|
pij (t)pi (0) qj
{z
pj (t)
}
pi (t) = 1.
Schritt 3: Falls möglich, Ermittlung einer stationären Verteilung P (X = i) = p∗i durch „Nullsetzen“ der Ableitung p′i (t):
X
qki · p∗k − qi · p∗i ,
0=
k6=i
wobei – daran sei erinnert – (s.o.), dass
qi =
X
qik .
k6=i
Zur Ermittlung einer stationären Verteilung ist also offenbar ein lineares Gleichungssystem zu lösen, welches sich in der Form Qp∗ = 0 darstellen lässt, wobei die Koeffizienten
von Q direkt aus dem Markov-Graphen abgelesen werden können. Für die Zeile Nr. i der
Intensitätsmatrix Q gilt
qji ,
j 6= i, qji > 0
Q = Qij =
−qi , i = j
0,
sonst.
65
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
5.3 Modellierung allgemeinere Ankunfts- und Bedienprozesse
Es sei (Xt )t∈[0,∞[ eine Markov-Kette mit stetiger Zeit, I = {0, 1, . . . , ∞} oder I = {0, 1, . . . , N }.
(Xt )t∈[0,∞[ habe die Eigenschaft, innerhalb eines kleinen Zeitintervalls nur in Nachbar-Zustände
„springen“ zu können, genauer: qij = 0 falls |i − j| > 1.
Mit der Setzung
λi := qi,i+1 > 0
und
µi := qi,i−1 > 0
hat man dann im Sinne unserer obigen Interpretation den nachfolgend dargestellten zugehörigen Markov-Graphen des Prozesses gegeben.
λ0
x0
λ1
x1
λ2
µ2
λm−2
...
x2
µ1
...
µ3
...
λm−1
...
xm
xm−1
µm−1
λm
µm+1
µm
Abbildung 5.1: Markov-Graph zum allgemeinen Ankunfts- und Bedienprozess
Vergleichen wir diesen Markov-Graphen mit dem Markov-Graphen, den wir für die Zufallsvariable L für das M |M |1-Wartesystem gewonnen hatten, so erkennen wir zunächst eine große
strukturelle Ähnlichkeit. Er ist aber bereits wesentlich allgemeiner als der dortige Graph, da
hier die Übergangsintensitäten nicht konstant sind (λ bzw. µ) sondern vom jeweiligen Zustand
Nr. i abhängen (λi , µi ). Dies ist – wie wir sehen werden – sehr nützlich für die Beschreibung
allgemeiner Wartesysteme.
Falls eine stationäre Anfangsverteilung (p∗i )i∈N für die sich aus der Markov-Kette ergebende Zufallsvariable X (=
b Markov-Kette im stationären Zustand) gesucht wird, kann man sie
entsprechend dem vorherigen „Schritt 3“ mittels des Gleichungssystems Q · p∗ = 0, mit
Q=
−λ0
µ1
λ0 −(λ1 + µ1 )
µ2
0
λ1
−(λ2 + µ2 )
..
.
λi−1
µ3
−(λi + µi ) µi+1
..
.
.
bestimmen. Die Koeffizienten der Intensitätsmatrix Q liest man aus dem Markov-Graphen ab.
Es ergibt sich also für i = 0
p∗0 = (1 − λ0 ) · p∗0 + µ1 · p∗1 ,
d.h.
λ0 · p∗0 = µ1 · p∗1
66
(5.2)
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
und für i ≥ 1
p∗i = (1 − λi − µi ) · p∗i + λi−1 · p∗i−1 + µi+1 · p∗i+1 ,
d.h.
(λi + µi ) · p∗i = λi−1 · p∗i−1 + µi+1 · p∗i+1 .
(5.3)
Die Frage, unter welchen Bedingungen dieses Gleichungssystem lösbar ist, beantwortet der
folgende Satz:
Satz 5.10
Es seien λi , µi ≥ 0, i = 1, 2, . . .. Es gebe eine Zahl q mit 0 < q < 1 derart, dass
alle k > k0 .
Dann besitzt das Gleichungssystem Q · p∗ = 0 eine nicht-triviale Lösung p∗ .
Beweis: Siehe [1]
λk−1
µk
≤ q für
Bemerkung 5.11
λ
Die Bedingung µk−1
≤ q für alle k > k0 ist eine Verallgemeinerung der Stabilitätsbedingung
k
λ
µ < 1, wie wir sie aus dem M |M |1-Wartesystem kennen. Sie sorgt dafür, dass das Wartesystem
(auf Dauer) nicht „überläuft“.
Wie beim M |M |1-Wartesystem, nennen wir daher ein (allgemeines) Wartesystem mit obigem
Markov-Graphen stabil, wenn diese allgemeinere Bedingung erfüllt ist.
Bemerkung 5.12
Wie bereits beim speziellen Fall eines M |M |1-Systems lässt sich dieses Gleichungssystem als
System von „Gleichgewichts- Gleichungen“ (Gleichungen 5.2 und 5.3) interpretieren.
Sie besagen, dass für eine Markov-Kette in jedem Zustand Nr. i der „Fluss“ auf denjenigen
Kanten, die aus dem Zustand Nr. i heraus zu anderen Zuständen verlaufen ((λi + µi ) · p∗i ) dem
„Fluss“ auf den Kanten, die von anderen Zuständen in den Zustand Nr. i hinein verlaufen
(λi−1 · p∗i−1 + µi+1 · p∗i+1 ) entspricht.
λi−1 · p∗i−1
λi · p∗i
i
„=“
i
µi · p∗i
„+“
i
µi+1 · p∗i+1
Diese allgemeine Tatsache lässt sich hier nun speziell nutzen, um die stationäre Anfangsverteilung (p∗i )i∈N rekursiv zu bestimmen.
67
5 Markov-Ketten als Instrumente zur Modellierung technisch-ökonomischer Wartesysteme
Master-Modul IV
OR II c,
Daraus ergibt sich die folgende rekursive Berechnungsvorschrift(machen Sie sich das bitte
klar):
λi · p∗i = µi+1 · p∗i+1 ,
d.h.
p∗i =
λi−1 ∗
· pi−1 ,
µi
i = 0, 1, . . .
i = 1, 2, . . . .
Kennt man also p∗0 so lassen sich alle übrigen stationären Zustandswahrscheinlichkeiten p∗i
(rekursiv) ermitteln. Man hat also
Satz 5.13
Unter den Stabilitätsvoraussetzungen des Satzes 5.10 gilt für i = 1, 2, ...:
p∗i =
λi−1 ∗
· pi−1 =
µi
wobei sich p∗0 über die Bedingung
P∞
∗
i=0 pi
λi−1 · λi−2 · · · λ0
µi · µi−1 · · · µ1
· p∗0 ,
(5.4)
= 1 ermitteln lässt.
Beweis: Übungsaufgabe. Per vollständiger Induktion über i.
Bemerkung 5.14
Wie beim M |M |1-System interpretieren wir diese Zustandswahrscheinlichkeiten des Wartesystems im stationären Zustand oft als
ˆ zeitlicher Anteil, in dem sich das Wartesystem im Zustand Nr. i befindet.
• p∗i =
bzw. als Pasta-Eigenschaft
• p∗i =
ˆ Anteil der ankommenden Kunden, die das Wartesystem im Zustand Nr. i vorfinden.
68
6 Wartesysteme mit „Einzelankünften“ und
„Einzelbedienungen“
In diesem Kapitel wollen wir nun spezielle technisch-ökonomische Wartesysteme betrachten.
Wir werden dabei im Wesentlichen den am Ende des vorherigen Kapitels hergeleiteten MarkovGraphen für den allgemeineren Ankunfts- und Bedienprozess heranziehen, um die zu untersuchenden Wartesysteme zu modellieren. Generell werden wir hier zunächst annehmen, dass
die Kunden „einzeln“ in das Wartesystem eintreten und auch „einzeln“ von der (oder den)
vorhandenen Bedienstationen abgefertigt werden.
Für die Analyse des Systems wollen wir die bereitgestellten Kenntnisse über homogene MarkovKetten heranziehen und uns dabei konzentrieren auf:
• die Aufstellung des Markov-Graphen,
• das Bestimmen stationärer Anfangsverteilungen,
• das Ermitteln von sich daraus ergebenden charakteristischen Kenngrößen des technischökonomischen Wartesystems.
6.1 Wartesystem vom Typ M|M|1 mit ungeduldig ankommenden
Kunden
Wir nehmen an, dass wir ein Wartesystem vom Typ M |M |1 mit der Ankunftsrate λ bzw.
der Bedienrate µ vorliegen haben. Bei der Ankunft eines neuen Kunden am System reiht sich
dieser allerdings nicht unbedingt in die mögliche Warteschlange ein, sondern entscheidet sich,
wenn er feststellt, dass i Kunden im System sind, mit einer Wahrscheinlichkeit ai für den
tatsächlichen Eintritt (und damit dann für die Einreihung in die möglicherweise vorhandene
Warteschlange). Um diese Situation zu beschreiben, betrachtet den zugehörigen homogenen
Markov-Prozess (Lt )t∈[0,∞[ (Lt =
b Anzahl der Kunden im System) und die Interpretation der
Kantengewichte in einem zugehörigen Markov-Graphen.
qi,i+1
i
pi,i+1 (h)=qi,i+1 ·h+o(h)
i+1
Interpretation
⇐⇒
69
i
i+1
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Mit den Überlegungen aus dem Markov-Graphen für das „reinem“ M |M |1 Wartesystem (siehe
Seite 39) überlegen für für die vorliegende Situation:
pi,i+1 (h)
=
=
=
=
=
(λ · h + o(h)) · P (Übergang von i nach i + 1 kann überhaupt stattfinden)
(λ · h + o(h)) · P (ankommender Kunde reiht sich in die Warteschlange ein)
(λ · h + o(h)) · ai
λ · ai · h + o(h) · ai
(λ · ai ) · h + o(h)
| {z }
λi
→ λi = λ · ai .
Dann führt dies zu dem Markov-Graphen:
λ1 =λa1
λ0 =λa0
0
1
µ
...
λ2 =λa2
...
2
µ
λk−1 =λak−1
...
k
...
µ
λk =λak
µ
µ
Um die stationären Verteilungen (p∗i )i∈N0 , p∗i := P (L = i) zu bestimmen, stellt man das
entsprechende Gleichungssystem
Qp∗ = 0
auf, wobei sich die Intensitätsmatrix Q –wie eben dargestellt– aus dem Markov-Graphen ergibt
als:
−λ · a0
µ
0
...
λ·a
−(λ · a1 + µ)
µ
0
...
0
0
λ
·
a
−(λ
·
a
+
µ)
µ
0
.
.
.
.
1
2
Q=
..
..
..
..
.
.
.
.
0
...
0
λ · ai −(λ · ai + µ) µ
Nach dem im vorherigen Kapitel Gesagten ist also das Gleichungssystem im Fall ̺ = µλ < 1
(d. h. Verkehrsintensität kleiner 1) nicht-trivial lösbar. Man erhält unter Benutzung der Rekursion 5.4 in Satz 5.13 (Seite 68)
p∗i = P (L = i) =
−1
n−1
∞
Q
P
, i=0
aν
̺n
1+
n=1
p∗0
·
̺i
·
ν=0
i−1
Q
ν=0
aν ,
i ≥ 1.
Bemerkung 6.1
Analog zu Satz 4.6 lassen sich nun für das „M |M |1“-System mit ungeduldigen Kunden etwa
die Größen E[L], E[N ], E[V ], E[W ], . . . angeben.
70
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
6.1.1 Erfassungsrate und effektive Ankunftsrate
Innerhalb eines Wartesystems mit ungeduldigen Kunden interessiert man sich nun häufig für
ein Maß, welches die tatsächlich „bedienten“ Kunden erfasst. Dies erfolgt durch die sogenannte
Erfassungsrate.
Im stationären Zustand drückt die Erfassungsrate β den Anteil der Kunden aus, die - auf
lange Sicht gesehen - tatsächlich in das Wartesystem eintreten, d. h.
β=
Anzahl der tatsächlich bedienten Kunden
.
Anzahl der potentiell zu bedienenden Kunden
Die Ermittlung einer solchen Erfassungsrate machen wir uns wie folgt klar.
Für M |M |1 mit ungeduldigen Kunden:
Während eines Zeitintervalls der Länge T ist die Bedienstation durchschnittlich eine Zeitdauer
von (1 − p∗0 ) · T in Betrieb, und es werden durchschnittlich
(1 − p∗0 ) · T
= (1 − p∗0 ) · µ · T
E(S)
Kunden abgefertigt. In dieser Zeit hätten andererseits – sofern kein Kunde ungeduldig gewesen
wäre – λ · T Kunden in das Wartesystem eintreten können. Damit erhält man für β, dass
(1 − p∗0 ) · µ · T
= (1 − p∗0 ) · ̺−1 .
λ·T
Die effektive Ankunftsrate λeff der tatsächlich pro Zeiteinheit in das Wartesystem eintretenden Kunden ist dann
λeff = β · λ = µ · (1 − p∗0 ).
β=
Allgemein:
Mit einer ähnlichen Überlegung können wir uns die Größe der Erfassungsrate β auch für
allgemeinere Wartesysteme mit mehr als einer Bedienstation klarmachen. Dazu betrachten
wir einen anderen stochastischen Prozess, nämlich (Barb )t∈[0,∞[ wobei Barb,t der Anzahl der
zum Zeitpunkt t bedienenden Stationen entspricht. Wir nehmen an, dass die Bedienzeit S der
Kunden an allen Bedienstationen dieselbe sei (E(S) = µ1 ).
Befindet sich das Wartesystem im stationären Zustand, so liefert die Zufallsvariable Barb
dann die Anzahl der bedienenden Stationen. Angenommen, wir könnten den Erwartungswert
E(Barb ) von Barb ermitteln, dann überlegen wir uns – genau wie im Fall einer Bedienstation–
folgendes:
Während eines Zeitintervalls der Länge T sind die Bedienstationen durchschnittlich T ·E(Barb )
Zeiteinheiten in Betrieb, und es werden im Mittel
T · E(Barb )
= T · E(Barb ) · µ
E(S)
Kunden bedient. In dieser Zeit hätten λ·T Kunden in das Wartesystem eintreten können (bzw.
sind eingetreten). Damit hat man in diesen Fall für die Erfassungsrate β und die effektive
Ankunftsrate λeff :
µ
β = E(Barb ) ·
und
λeff = β · λ = E(Barb ) · µ.
λ
71
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Bemerkung 6.2
Für die Situation einer Bedienstation gilt offenbar: E(Barb ) = 1 − p∗0 .
6.2 Wartesysteme vom Typ M|M|m
Wir betrachten ein Wartesystem mit m Bedienstationen. Die Kunden betreten dabei das Wartesystem entsprechend eines Poisson’schen Ankunftsprozesses mit Intensität λ (Ankunftsrate).
Jede der m Bedienstationen kann nur einen Kunden bedienen. Gibt es beim Eintreffen eines
Kunden eine freie Bedienstation, so beginnt seine Bedienung sofort, anderenfalls reiht er sich
in die Warteschlange ein. Die Bedienzeit der Kunden sei unabhängig von der Station, an der er
bedient wird. Sie gehorche bei allen Stationen derselben Exponentialverteilung mit Parameter
µ. Weiterhin seien die m Bedienzeiten voneinander unabhängig.
¹
¹
¸
¹
Nun betrachten wir wieder die homogene Markov-Kette mit stetiger Zeit (Lt )t∈[0,∞[ , (Lt entspricht hierbei wie bisher der Anzahl der zum Zeitpunkt t im Wartesystem befindlichen Kunden)
und interessieren uns dann wieder für die Zufallsvariable (bzw. deren Verteilung) L, wobei L
der Anzahl der im Wartesystem befindlichen Kunden entspricht, wenn das System sich „eingeschwungen“ hat (stationärer Zustand).
Offenbar kann Lt , und damit L, die Zustände 0, 1, 2, . . . annehmen. Der Übergang vom Zustand „i Kunden sind im Wartesystem“ in den Zustand „i + 1 Kunden sind im Wartesystem“
wird durch den Parameter des Poisson’schen Ankunftsprozesses λ bestimmt, d. h. für die Übergangsintensität qi,i+1 gilt (siehe Beispiel 5.8):
qi,i+1 = λ
und
qi,j = 0
für j > i + 1.
λ
i
i+1
Wir müssen uns nun die Übergangsintensität qi,i−1 überlegen. Wir wissen, dass wir mit den
Übergangsintensitäten die folgende Interpretation verbinden:
72
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
„In einem kleinen Zeitraum h ist die Wahrscheinlichkeit, dass der Prozess Lt+h den Zustand
i − 1 annimmt, falls Lt im Zustand i war, genau qi,i−1 · h + o(h), d. h.
P (Lt+h = i − 1 | Lt = i) = qi,i−1 · h + o(h).“
Ein Übergang von i nach i − 1 innerhalb von h Zeiteinheiten erfolgt offenbar genau dann,
wenn die erste der zum Zeitpunkt t arbeitenden Bedienstationen innerhalb der h Zeiteiheiten frei wird. (Man beachte: wenn Lt = i, i ≥ m, dann arbeiten zum Zeitpunkt t alle m
Bedienstationen, wenn i < m, dann arbeiten i Bedienstationen.
Die folgende Überlegung kann als Spezialfall des Satzes 2.24 (siehe S. 21) aufgefasst werden.
(Machen Sie sich dies bitte klar):
Arbeiten j Bedienstationen 1 ≤ j ≤ m, so wird das Freiwerden einer Bedienstation durch
die einzelnen (alle mit Parameter µ exponentialverteilten) Bedienzeiten an den j Stationen
bestimmt. Da diese unabhängig voneinander arbeiten, erhalten wir für „kleine“ h, dass
P (Eine der j Bedienstationen wird innerhalb der nächsten h Zeiteinheiten frei)
= P (S (1) ≤ h) oder (S (2) ≤ h) oder . . . oder (S (j) ≤ h)
= P
min {S
(k)
k=1,2,...,j
= 1−P
}≤h
min {S
(k)
k=1,2,...,j
}>h
= 1 − P (S (k) > h für alle k = 1, 2, . . . j)
= 1 − P (S (1) > h) und (S (2) > h) und . . . und (S (j) > h)
= 1 − P (S (1) > h) · P (S (2) > h) · · · P (S (j) > h)
−µ·h
= 1 − (e| −µ·h · e−µ·h
{z · · · e })
j-mal
−j·µ·h
= 1−e
.
D. h. das Minimum der Bedienzeiten S (1) , . . . , S (j) ist exponentialverteilt mit Parameter j ·
(j)
µ, was wiederum bedeutet, dass der Austritts prozess (δt )t∈[0,∞[ , bei j ≥ 1 bedienenden
Stationen ein Poisson-Prozess mit Intensität j · µ ist.
Für den Fall, dass 1 ≤ i ≤ m ist, arbeiten i Bedienstationen und es gilt
qi,i−1 · h + o(h) = P (Lt+h = i − 1 | Lt = i)
= P (In einem Zeitraum der Länge h wird ein Kunde abgefertigt)
(i · µ · h)1 −i·µ·h
=
·e
1!
= i · µ · h · (1 + o(h))
=⇒ qi,i−1 = i · µ
i
i−1
i·µ
73
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Falls i > m ist, gilt
qi,i−1 · h + o(h) = P (Lt+h = i − 1 | Lt = i)
= P (In einem Zeitraum der Länge h wird ein Kunde abgefertigt)
(m · µ · h)1 −m·µ·h
·e
=
1!
= m · µ · h · (1 + o(h))
=⇒ qi,i−1 = m · µ
Und weiterhin gilt, dass qi′ ,j = 0 für i′ < i − 1 und insgesamt gilt dann:
λ
i
i−1
(
i·µ,
falls i ≤ m
m·µ,
sonst
Man erhält somit den Markov-Graphen:
λ
0
λ
1
λ
2µ
3µ
λ
λ
...
2
µ
...
m
...
mµ
λ
...
m+1
mµ
...
mµ
...
Anhand dieses Graphen erkennt man nun wieder unmittelbar die Intensitätsmatrix Q, die man
Berechnen einer stationären Verteilung p∗ für die Zufallsvariable L hernaziehen kann. Offenbar
ist
Q=
−λ
µ
λ
−(λ + µ)
..
..
.
.
λ
0
2·µ
..
.
...
0
..
.
...
−(λ + (m − 1)µ)
m·µ
0
...
λ
−(λ + mµ)
m·µ
0
...
λ
−(λ + mµ) m · µ 0
..
..
..
.
.
.
...
Die Anwendung Stabilitätsbedingung des Satzes 5.10 liefert, dass für
λ
< 1,
m·µ
dieses Gleichungssystem nicht-trivial lösbar ist, d. h. das Wartesystem ist unter dieser Bedingung stabil und besitzt eine stationäre Verteilung für die Zufallsvariable L. Man erhält unter
74
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
λ
µ
Benutzung der Rekursion 5.4 in Satz 5.13 (Seite 68) und mit der Setzung ̺ =
rung: ̺ =
b Verkehrsintensität einer Bedienstation):
(zur Erinne-
1
1
· ̺ · p∗i−1 = · ̺i · p∗0 ,
i = 1, . . . , m
i i−mi!
P (L = i) = p∗i =
̺
1
· ̺i · p∗0 , i > m,
=
p∗m ·
i−m
m! · m
m
mit
p∗0
m−1
X
=
i=0
1
̺m
̺i
+
·
i!
(m − 1)! m − ̺
!−1
.
Die sich aus dieser stationären Verteilung p∗ für den Prozess L (Anzahl der Kunden im System,
wenn sich das System im steady state befindet) ergebenden charakteristischen Kenngrößen wollen wir nun zusammenfassen.
Satz 6.3
Gegeben sei das oben beschriebene Wartesystem M |M |m mit Ankunftsrate λ, Bedienrate µ
und ̺ = µλ .
Im stationären Zustand gelten dann folgende Aussagen:
(i) Für die Wahrscheinlichkeit, dass alle Bedienstationen frei sind, gilt:
P (Alle Bedienstationen sind frei)
= P (L = 0) =
p∗0
=
m−1
X
i=0
mit ̺ =
λ
µ
1
̺m
̺i
+
·
i!
(m − 1)! m − ̺
!−1
.
(ii) Für die Wahrscheinlichkeit, dass ein ankommender Kunde warten muss, gilt:
P (Ein ankommender Kunde muss warten)
= P (L ≥ m)
= P ((L = m) ∨ (L = m + 1) ∨ (L = m + 2) ∨ . . . )
∞
X
=
p∗i
i=m
∞
̺m ∗ X
̺
=
· p0 ·
m!
m
k=0
k
=
p∗m
̺ .
1− m
(iii) Für die durchschnittliche Länge E(N ) der Warteschlange gilt:
E(N ) =
∞
X
(i − m) ·
p∗i
=
∞
X
i=m
i=m
(i − m)
· p∗m
̺
·
m
i−m
=
p∗m
̺
·
·
m
1
̺
1− m
!2
(iv) Für die durchschnittliche Anzahl der Kunden E(L) im Wartesystem gilt:
E(L) =
m−1
X
i=1
i·p∗i +
∞
X
p∗m
i=0 |
̺
·
m
{z
=p∗m+i
i
}
·(m+i) = ̺·
75
m−2
X
i=0
p∗i +p∗m ·m·
1
̺
1
∗
·
̺ +pm ·
̺ 2
1− m
m (1 − m
)
|
{z
E(N )
}
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
(v) Für die mittlere Anzahl der arbeitenden Bedienstationen E(Barb ) gilt:
E(Barb ) = E(L) − E(N ) = ̺ ·
m−2
X
i=0
p∗i + p∗m · m ·
1
̺
1− m
Alternativ: im M |M |m System mit geduldigen Kunden gilt β = 1 und mit
β = E(Barb ) · ̺−1 ⇒ E(Barb ) = ̺
(vi) Für die mittlere Anzahl der freien Bedienstationen E(Bfrei ) gilt:
E(Bfrei ) = m − E(Barb ) =
m−1
X
k=0
(m − k) · p∗k = p∗0 ·
m−1
X
k=0
m−k k
·̺
k!
(vii) Die mittlere Wartezeit E(W ) in der Warteschlange bzw. die mittlere Verweilzeit E(V )
im System berechnet sich über die Little’schen Formeln:
E(W ) =
1
· E(N )
λ
bzw. E(V ) =
1
· E(L).
λ
Bemerkung 6.4
(i) Grundsätzlich ist es auch in einem M |M |m-Wartesystem möglich, dass die Übergangsintensitäten λ nicht konstant sind, sondern vom Zustand L = i abhängig sind (λi ). Die
stationären Zusandswahrscheinlichkeiten lassen sich natürlich auch in einem solchen Fall
über die Rekursionsgleichung 5.4 bestimmen.
(ii) Eine Möglichkeit, ein solches Wartesystem ökonomisch zu bewerten, wäre etwa durch die
folgende Kostenfunktion
C(λ, µ, m) = c1 · m + c2 · E(Barb ) + c3 · E(Bfrei ) + c4 · E(N )
gegeben. Hierbei beschreibt c1 die Kosten, die für den Unterhalt einer Bedienstation
anfallen, c2 die Kosten, die entstehen, wenn eine Bedienstation „arbeitet“ und c3 die
Stillstandskosten einer Bedienstation. Die Größe c4 erfasst die „Kosten“ für einen wartenden Kunden.
Beispiel 6.5
Wir betrachten das Kassensystem einer mittelgroßen Aldi-Filiale. Der Manager vor Ort hat
folgende „Kassenöffnungspolitik“ vorgegeben:
Ist kein Kunde im Kassenbereich, so hat keine Kasse geöffnet; befinden sich zwischen 1 und
4 Kunden im Kassenbereich, so wird eine Kasse geöffnet; befinden sich zwischen 5 und 10
Kunden im Kassenbereich, so werden 2 Kassen besetzt; bei 11 und mehr Kunden sind es alle
3 Kassen.
Diese Kassenöffnungspolitik soll nun von Ihnen analysiert werden.
76
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Dazu haben Sie zunächst festgestellt, dass die Kundenankünfte im Kassenbereich gemäß eines
Poisson-Prozesses erfolgen und im Mittel 42 Kunden pro Stunde dort eintreffen. Die durchschnittliche, exponentialverteilte Abfertigungszeit an den Kassen beträgt 3 Minuten, wobei alle
Kassen gleich schnell arbeiten.
Zunächst sollen Sie für diese Situation den zugehörigen Markov-Graphen für die Zufallsgröße
L = „Anzahl der Kunden im System“ skizzieren und anschliessend mit der Rekursionsionsgleichung 5.4 die stationäre Verteilung für bestimmen (das alles sollten Sie am Besten in Excel
durchführen). Anschliessend sind folgenden Fragen zu beantworten:
(i) Wie hoch ist der zeitliche Anteil, an dem eine Kasse (zwei Kassen, alle drei Kassen)
besetzt ist?
(ii) Wie viele Kassen sind durchschnittlich unbesetzt?
(iii) Welche Länge hat die Warteschlange im Mittel?
(iv) Wie lange muss ein Kunde durchschnittlich warten, bis er bedient wird?
(v) Wie ändern sich alle diese Größen, wenn sich die durchschnittlichen Kundenankünfte um
10 % erhöhen (erniedrigen) sollten?
(vi) Wie ändern sich alle diese Größen, wenn sich die durchschnittliche Zeit für den Kassiervorgang von 3 Minuten auf 4 Minuten (auf 2 Minuten) erhöht (erniedrigt)?
(vii) Wie ändern sich diese Größen, wenn die dritte Kasse ausfällt, d.h. nicht besetzt werden
kann?
(viii) Wie ändern sich diese Größen, wenn eine vierte Kasse geöffnet werden kann, die immer
dann besetzt wird, wenn sich 14 Kunden und mehr im Kassenbereich befinden?
(ix) „Versuchen“ Sie herauszufinden, ob es eine „Kassenöffnungspolitik“ gibt, die dafür sorgt,
dass die durchschnittliche Wartezeit eines Kunden nicht größer als 4 Minuten ist.
„Experimentieren“ Sie bitte auch selbst ein wenig mit dem Wartesystem (auf Ihrem ExcelBlatt), indem Sie z.B. die Ankunftsrate der Kunden/Servicezeit der Kassen einmal „stark“
erhöhen/erniedrigen. Auch können Sie die Politik, wann bestimmte Kassen geöffnet werden
sollten, verändern um die Effekte, die sich damit einstellen, zu erkennen.
Beispiel 6.6
Der Kassenbereich einer Aldi-Filiale besteht aus 3 Kassen Durchschnittlich 15 Kunden treten
pro Stunde an die Kassen entsprechend einem Poisson-Prozess heran. Die Zeit für das Abkassieren eines Kunden ist exponential-verteilt mit einer durchschnittlichen Dauer von 2 Minuten.
Sofern ein Kassiervorgang beendet ist und sich kein weiterer Kunde im Kassenbereich befindet,
beginnt die Kassiererin damit, Ware aus den Kisten auszupacken um damit die Regale nachzufüllen. Das Auspacken und Einlagern pro Kiste benötigt eine exponential-verteilte Anzahl
an Zeit und dauert durchschnittlich 5 Minuten. Sobald allerdings wieder ein Kunde an eine
Kasse herantritt, unterbricht die Mitarbeiterin das Auffüllen der Regale und beginnt mit dem
Kassiervorgang. Das weitere Auspacken der Kiste(n) und Auffüllen der Regale setzt sie dann
später fort.
(i) Skizzieren Sie bitte den zugehörigen Markov-Graphen.
77
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
(ii) Stellen Sie bitte das System der Gleichgewichtsgleichungen auf.
(iii) Wie gross ist durchschnittlich die Anzahl der Kassen, die mit einem Kassiervorgang
beschäftigt sind?
(iv) Wieviele Warenkisten werden durchschnittlich pro Stunde in die Regale aufgefüllt?
(v) Wie gross ist die Wahrscheinlichkeit, dass ein Kunde auf den Kassiervorgang warten
muss?
(vi) Wie lange muss im Mittel ein Kunde auf den Kassiervorgang warten?
Beispiel 6.7
Sie erinnern sich vielleicht, dass es – beispielsweise bei der Post – früher üblich war, dass es
eine Reihe von Postschaltern gab, und sich hinter jedem einzelnen Postschalter eine separate,
eigene Warteschlage bildete. Seit einigen Jahren ist nun zu beobachten, dass man von diesem
Typ von mehreren, einzelnen Wartesystemen Abstand genommen hat und stattdessen dafür
gesorgt wird, dass sich auch bei mehreren Postschaltern nur eine einzige Warteschlange bilden
kann. Die folgende Übungsaufgabe soll Ihnen deutlich machen, dass ein solcher „Wechsel“ der
Wartesystem-Typen sinnvoll war.
Übung:
Betrachten Sie bitte zwei Wartesysteme
(1): M |M |1 mit Parametern λ bzw. µ
(2): M |M |2 mit Parametern 2 · λ und µ
Es beschreibe W (i) die durchschnittliche Wartezeit eines Kunden im Wartesystem i, i = 1, 2.
Zeigen Sie mit den obigen Kenngrößen und unter Zuhilfenahme der Little’schen Formel, dass
gilt:
E(W (2) ) < E(W (1) ).
Das Beispiel lässt sich leicht auf m Wartesysteme vom Typ M |M |1 mit Parametern λ bzw.
µ einerseits und ein Wartesystem vom Typ M |M |m mit Parametern m · λ und µ übertragen.
Interpretieren Sie bitte Ihr Ergebnis vor dem Hintergrund der Änderung der „WartesystemTypen“ bei der Post.
6.3 Ein Wartesystem vom Typ M|M|∞: Selbstbedienung
Hier betrachten wir den Spezialfall eines Systems M |M |m, nämlich ein Wartesystem, welches
(gedanklich) beliebig viele Bedienstationen besitzt (m = ∞).
Der Ankunftsprozess (αt )t∈[0,∞[ der Kunden sei wiederum ein Poisson-Prozess mit Intensität λ (also exponential verteilte Zwischenankunftszeiten). Die Bedienzeiten der Kunden seien
exponentialverteilt mit Parameter µ.
78
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Wegen m = ∞ muss keiner der Kunden warten, da er unmittelbar bei Ankunft im Wartesystem
auf eine freie Bedienstation trifft. Diese Situation tritt beispielsweise auf, wenn sich der Kunde
„selbst“ bedienen kann.
Wiederum betrachten wir jetzt die homogene Markov-Kette (Lt )t∈[0,∞[ (Anzahl der Kunden im
System zum Zeitpunkt t). Da der Prozess (Nt )t∈[0,∞[ (Anzahl der Kunden in der Warteschlange
zum Zeitpunkt t) identisch Null ist, haben wir auch Barb,t = Lt . Der Prozess Lt , und damit
auch die Zufallsvariable L (Anzahl der Kunden im System im stationären Zustand), kann
offenbar die Werte 0, 1, . . . annehmen.
Auf exakt dieselbe Weise wie im M |M |m-Wartesystem überlegen wir uns die Übergangsintensitäten qi,i+1 bzw. qi,i−1 (wir beachten dabei nur, dass m beliebig groß sein kann).
Damit erhalten wir
qi,i+1 = λ,
i = 0, 1, . . .
qi,i−1 = i · µ, i = 1, 2, . . .
qi,j = 0,
|i − j| > 1.
Auf diese Weise erhält man den Markov-Graphen dieses „Selbstbedienungssystems“ (wiederum
sind die Schleifen nicht eingezeichnet) als
λ
λ
λ
0
1
µ
...
...
2
3µ
2µ
λ
λ
...
k
...
...
kµ
(k+1)µ
...
bzw. das Gleichungssystem Qp∗ = 0 mit der Intensitätsmatrix
−λ
µ
λ −(λ + µ)
0
.
.
.
Q=
λ
0
..
.
0
2µ
···
0
···
..
.
−(λ + 2µ)
3µ
..
.
0
λ
−(λ + 3µ)
..
.
kµ
0
λ
..
..
..
.
. −(λ + kµ)
.
λ
..
.
···
0
···
..
.
(k + 1)µ
..
.
−(λ + (k + 1)µ)
..
..
.
.
·
λ
Dieses Gleichungssystem ist nach 5.10 stets lösbar (das Wartesystem ist also stabil) , da i·µ
< 1,
falls i hinreichend groß ist, Man erhält unter Benutzung der Rekursion 5.4 in Satz 5.13 (Seite
68) mit ̺ = µλ , dass
(
e−̺ ,
i=0
∗
pi = P (L = i) =
̺i
∗
p0 · i! , i ≥ 1
also p∗i =
̺i
i!
· e−̺ , d. h. die Zufallsvariable L ist Poisson-verteilt mit Parameter ̺ = µλ .
79
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Wir fassen wieder zusammen:
Satz 6.8
Gegeben sei das oben beschriebene „Selbstbedienungssystem“ M |M |∞ mit den Parametern λ
und µ. Dann gelten im stationären Zustand
(i) p∗i = P (L = i) = P (Barb = i) =
̺i −̺
i! e ,
(ii) E(L) = E(Barb ) = ̺ = λµ .
Bemerkung 6.9
Auch hier wieder: die Übergangsintensitäten λ müssen nicht konstant sein, sondern können
vom Zustand L = i abhängig sein (λi ). Die stationären Zusandswahrscheinlichkeiten lassen
sich auch in diesem Fall über die Rekursion 5.4 in Satz 5.13 bestimmen.
Die Betrachtung von „Selbstbedienungssystemen“ ist vom ökonomischen Standpunkt vor allem im Vergleich zu Systemen der Form M |M |m bzw. M |M |m|K interessant. In Selbstbedienungssystemen tauchen zwar keine Wartezeiten auf und ein Kunde kann auch nicht abgewiesen
werden, da das System eine unendliche Kapazität besitzt, andererseits kann es sein, dass die
durchschnittliche Bedienzeit µ1 im Selbstbedienungssystem erheblich größer ist als in Wartesystemen mit „Fremdbedienung“ (Konsequenz: E(L) ist gross).
Beispiel 6.10 (vgl.[31])
Ein Investor möchte durchschnittlich einmal pro Monat 1000 EUR in einen speziellen Typ von
Pfandbrief investieren. Er wartet bei seinem Kauf allerdings stets auf eine „gute Kaufgelegenheit“, so dass der tatsächliche Kaufzeitpunkt zufällig ist. Die Zeit, die zwischen zwei Käufen
vergehnt, ist exponential-verteilt.
Nach dem Kauf hält der Investor das Wertpapier noch eine exponential-verteilte Zeit von
durchschnittlich 3 Jahren, bevor er es wieder abstößt und verkauft es erst, wenn es eine „gute
Verkaufsgelegenheit“ gibt. Aus Statistiken der Vergangenheit weiß der Investor, dass 25 % der
Pfandbriefe an Wert verlieren (und zwar 20 % pro Jahr), die übrigen 75 % allerdings gewinnen
12 % pro Jahr. Wie groß ist, auf Dauer gesehen, das durchschnittliche, jährliche Vermögen des
Investors?
Diese Situation kann als M |M |∞ Wartesystem aufgefasst werden. Der „Kundenquelle“ entspricht hier die Menge an Pfandbriefen, die man kaufen kann. Ein Kunde „betritt“ das Wartesystem dann, wenn der Investor den Pfandbrief kauft. Dies erfolgt durchschnittlich jeden
Monat einmal (d.h. λ = 12 pro Jahr). Die „Bedienung“ eines Pfandbriefes besteht im „Liegenlassen“, bis er wieder verkauft wird. Die durchschnittliche Bedienzeit beträgt 3 Jahre (d.h.
µ = 13 pro Jahr). Ein solcher Pfandbrief muss bis zu seiner „Bedienung“ natürlich nicht warten,
bis ein anderer verkauft ist („bedient“ wurde). Er wird nicht bedient, sondern er bedient sich
selbst.
Mit diesen Größen erhält man für L = „Anzahl der auf Dauer gehaltenen Pfandbriefe“ und
A = „jährliches Vermögen“:
λ
E(L) = ̺ = = 36,
µ
80
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
bzw.
E(A) = (0, 25 · E(L) · (1 − 0, 2) + 0, 75 · E(L) · (1 + 0, 12)) · 1000 = 37.440 EUR.
6.4 Ein Wartesystem vom Typ M|M|m|K
Im Folgenden betrachten wir ein M |M |m- System wie im vorherigen Abschnitt, jedoch mit den
zusätzlichen Bedingungen, dass das System eine Kapazität von K Warteplätzen hat. Sind also
m + K Kunden im Wartesystem, wird jeder weitere ankommende Kunde abgewiesen und geht
somit für das Wartesystem verloren. Man nennt das System in dieser Situation „blockiert“.
Bemerkung 6.11
Es spielt keine Rolle, ob die Kunden abgewiesen werden, weil bereits K Kunden warten, oder
ob sie aus eigenem Entschluss gehen, weil die Warteschlange die Länge K hat.
Wiederum betrachten wir den stochastischen Prozess (Lt )t∈[0,∞[ , wobei Lt der Anzahl der sich
zum Zeitpunkt t im Wartesystem befindenden Kunden entspricht. Offenbar kann Lt nur die
Zustände {0, 1, . . . , m+K} annehmen. Die Analyse der Übergangsintensitäten erfolgt wie beim
M |M |m-System und ergibt folgenden Markov-Graphen (ohne die Schleifen gezeichnet)
λ
0
1
µ
λ
λ
3µ
...
λ
...
...
...
(m−1)µ
mµ
...
mµ
λ
λ
m+
K−1
mµ
...
...
mµ
...
m+1
81
...
λ
m
m−1
λ
mµ
λ
λ
...
2
2µ
...
...
m+K
mµ
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
d. h.
λi = λ,
λm+K = (
0
µi =
OR II c, Master-Modul IV
0 ≤ i ≤ m+K −1
i · µ, 1 ≤ i ≤ m
m · µ, m ≤ i ≤ m + K,
aus dem unmittelbar das Gleichungssystem Q · p∗ = 0 für die stationäre Verteilung angegeben
werden kann. Die entsprechende Intensitätsmatrix hat das Aussehen
−λ
µ
λ −(λ + µ)
2·µ
λ
−(λ + 2 · µ) 3 · µ
..
Q=
.
..
.
λ
−m · µ
·
Die Stabilitätsvoraussetzungen des Satzes 5.10 sind in diesem Fall übrigens mit beliebigen(!)
Werten von λ, µ > 0 stets erfüllt (Warum?). Das heißt:
Das Wartesystem ist stets stabil. Damit gibt es stets eine stationäre Verteilung (p∗i )i=0,1,...,m+K .
Mit ̺ = µλ kann man sie ebenfalls unter Benutzung der Rekursion 5.4 aus Satz 5.13 (Seite 68)
ermitteln. Es ist dann:
1 · ̺i · p ∗ ,
1≤i≤m
0
∗
i!
pi =
1
· ̺i · p∗0 , m ≤ i ≤ m + K
m! · mi−m
Die Grösse p∗0 ergibt sich über die Normalisierungsbediung
m−1
P
i=0
p∗0 =
m−1
P
i=0
̺i
i!
mi
i!
+
1
m!
+ (K +
i=0
−1
̺ K+1
1−( m
)
̺
1− m
−1
m
,
1) · mm!
· ̺m ·
Pm+K
p∗i = 1:
, ̺ 6= m
̺=m
Die sich aus dieser stationären Verteilung p∗ für den Prozess L (Anzahl der Kunden im System
im stationären Zustand) ergebenden charakteristischen Kenngrößen fassen wir zusammen im
Satz 6.12
Gegeben sei das oben beschriebene System mit Ankunfstrate λ, Bedienrate µ und Verkehrsintensität ̺ := µλ . Dann gilt im stationären Zustand:
(i) P (Das System ist blockiert) = P (L = m + K) = p∗m+K mit
p∗m+K =
1
· ̺K+m · p∗0
m! · mK
(ii) P (Alle Bedienstationen sind besetzt)
= P (Ein ankommender Kunde muss warten oder wird abgewiesen)
= P (Ein ankommender Kunde muss warten)
+P (Ein ankommender Kunde
wird abgewiesen)
=
m+K
X
i=m
P (L = i) =
m+K
X
i=m
p∗i
=
p∗m ·
̺ K+1
)
1−( m
,
̺
1− m
p∗ · (K + 1),
m
82
̺ 6= m
̺ = m.
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
(iii) Für die durchschnittliche Länge der Warteschlange ergibt sich:
E(N ) =
m+K
X
j=m
= p∗m ·
und speziell für ̺ = m:
(j − m)
K
X
j=0
j·
· p∗j
̺
m
E(N ) = p∗m ·
=
m+K
X
j=m
j
(j − m) ·
p∗m
·
̺
m
j−m
K·(K+1)
.
2
(iv) Für die durchschnittliche Anzahl der freien Bedienstationen gilt:
E(Bfrei ) =
m
X
i=0
(m − i) · p∗i
(v) Für die durchschnittliche Anzahl der arbeitenden Bedienstationen gilt:
E(Barb ) = m − E(Bfrei )
(vi) Für die durchschnittliche Anzahl der Kunden im System gilt:
E(L) = E(Barb ) + E(N )
(vii) Die mittlere Wartezeit E(W ) in der Warteschlange bzw. die mittlere Verweilzeit E(V ) im
Wartesystem berechnet sich über die Little’schen Formeln und die effektive Ankunftsrate
λeff :
1
1
· E(N ) bzw. E(V ) =
· E(L).
E(W ) =
λeff
λeff
wobei λeff = λ · β mit Erfassungsrate β = E(Barb ) · ̺−1 ist (siehe Unterkap. 6.1.1).
Beispiel 6.13
Wir betrachten die Praxis eines Arztes, bei der beobachtet werden kann, dass der Ankunftsprozess (αt )t∈[0,∞[ ein Poisson-Prozess ist. Durchschnittlich werden 8 nachfragende Patienten pro
Stunde gezählt. Die Patienten werden vom Arzt in der Reihenfolge ihres Eintreffens behandelt.
Aus Statistiken ergibt sich, dass die Behandlungsdauer der Patienten exponentialverteilt ist
und sich der Arzt dabei durchschnittlich 6 Minuten für einen Patienten Zeit nimmt. Ankommende Patienten, welche den aus 5 Plätzen bestehenden Behandlungsraum besetzt vorfinden,
ziehen es vor, einen anderen Arzt zu besuchen.
a) Es handelt sich offenbar um ein M |M |1|5-System mit λ = 8 Patienten/h, µ = 10 Patienten/h, ̺ = 0, 8.
b) Wie groß ist die Wahrscheinlichkeit, dass ein Patient nicht behandelt werden kann und
wie viele Patienten gehen dem Arzt im Durchschnitt pro Arbeitstag (=8h) verloren?
83
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Es ist
P̄ = P (ein ankommender Kunde wird abgewiesen)
= P (Das System ist blockiert)
1
1−̺
= p∗m+K = p∗6 =
· ̺m+K · p∗0 = ̺6 · p∗0 = ̺6 ·
= 0,0663.
K
m! · m
1 − ̺7
Im Durchschnitt fragen pro Arbeitstag 8 · λ = 64 Patienten den Arzt nach, von denen
8 · λeff = 8 · λ · β tatsächlich „erfasst“ werden, also die Praxis überhaupt betreten. Alle
übrigen, d. h. 8 · (λ − λeff ) Patienten gehen der Arztpraxis im Mittel verloren.
Mit λeff = µ · (1 − p∗0 ) hat man also
8 · (λ − λeff ) = 64 − 8 · 10 · ̺ ·
1 − ̺6
1 − ̺7
!
= 4,25.
Alernative Berechnung ohne λef f :
P̄ · 64 = 4,25.
6.5 Wartesysteme vom Typ M|M|m|0 bzw. M|G|m|0
Ein Spezialfall eines M |M |m|K-Systems ist das System M |M |m|0. Wiederum kommen die
Kunden entsprechend eines Poisson’schen Prozesses mit Parameter λ am Wartesystem an, und
die Bedienung (mit Bedienrate µ) an einer der m Bedienstationen beginnt sofort, allerdings
nur dann, wenn eine Bedienstation frei ist. Anderenfalls, d. h. wenn alle Bediengeräte besetzt
sind, entfernt sich der Kunde wieder. (Es ist dabei gleichgültig, warum er sich entfernt: weil
er sich entfernen muss, da das System blockiert ist oder aus eigenem Antrieb, weil er bspw.
ungeduldig ist.)
¹
¹
¹
Beispiel 6.14
Um die Qualität eines Fertigungsprozesses zu sichern, sind an einem Fließband 2 Qualitätskontrolleure eingesetzt. Entsprechend einem Poisson’schen Ankunftsprozess kommen die zu
überprüfenden Teile mit durchschnittlich einem Teil pro Minute bei den Qualitätskontrolleuren an. Sind beide Kontrolleure mit der Inspektion beschäftigt, dann passiert ein ankommendes
Teil ungeprüft den Kontrollpunkt. Die Prüfzeit gehorcht bei beiden Kontrolleuren derselben
Exponentialverteilung. Für die Überprüfung eines Teil werden (unabhängig vom Prüfer) durchschnittlich 2 Minuten benötigt.
84
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Wir betrachten in diesem Wartesystem wiederum den stochastischen Prozess (Lt )t∈[0,∞[ , wobei
Lt der Anzahl der sich zum Zeitpunkt t im Wartesystem befindlichen Kunden entspricht. Lt
kann offenbar nur die Zustände 0, 1, 2, . . . , m annehmen. Die Analyse der Übergangsintensitäten ergibt dann unter Verwendung der Ergebnisse des Wartesystems M |M |m|K für K = 0
den Markov-Graphen (hier ohne Schleifen gezeichnet):
λ
λ
0
λ
1
µ
λ
λ
...
2
2µ
m
m−1
3µ
mµ
(m−1)µ
Damit hat man unmittelbar das Gleichungssystem Qp∗ = 0, mit dem eine stationäre Verteilung
für die Zufallsvariable L (Anzahl der Kunden im System, wenn sich das System im steady state
befindet) angegeben werden kann (Rekursion 5.4 in Satz 5.13 (Seite 68)). Es ist
−λ
µ
λ −(λ + µ) 2µ
Q=
0
..
.
0
mµ
λ −mµ
Damit erhält man die stationäre Anfangsverteilung:
P (L = i) = p∗i =
Wiederum führt die Bedingung
m
P
i=0
i
λ
1
·
i!
µ
· p∗0 ,
i = 0, 1, . . . , m.
p∗i = 1 dazu, dass
p∗0
=
!−1
m
X
1 λ i
i=0
i!
µ
.
Bemerkung 6.15
Man kann zeigen, dass die obige Formel für die stationäre Verteilung (p∗i )i=0,1,... der Zufallsvariablen L auch dann Gültigkeit hat, wenn die Bedienzeiten nicht notwendig exponentialverteilt
sind. Sie gilt in einem technisch-ökonomischen Wartesystem vom Typ M |G|m|0 immer, wenn
wir die durchschnittliche Bedienzeit E[S] darstellen als E[S] = µ1 .
Die wesentlichen Kenngrößen für die ökonomische Beurteilung des technisch-ökonomischen
Wartesystems vom Typ M |G|m|0 fassen wir im Folgenden wieder zusammen:
85
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Satz 6.16
Gegeben sei ein technisch-ökonomisches Wartesystem vom Typ M |G|m|0 mit Ankunftsrate
λ und E(S) = µ1 . Es sei ̺ = λµ . Dann gilt für die Zufallsvariable L (Anzahl der Kunden im
System im stationären Zustand):
(i) P (Das System ist blockiert) = P (L = m) = p∗m mit
p∗m
m
X
̺i
̺m
·
=
m!
i!
i=0
!−1
.
(ii) Für die durchschnittliche Anzahl arbeitender Bedienstationen gilt:
E(Barb ) = E(L) =
m
X
i=0
i · p∗i = ̺ ·
m
X
i=1
m−1
X
̺i−1
· p∗0 = ̺ ·
pi = ̺ · (1 − p∗m ).
(i − 1)!
i=0
(iii) Für den durchschnittlichen „Auslastungsgrad“ σ einer Bedienstation im stationären Zustand gilt:
E(Barb )
̺ · (1 − p∗m )
σ=
=
.
m
m
(iv) Für die effektive Ankunftsrate λeff gilt (siehe Unterkap. 6.1.1):
λeff = λ · β
mit Erfassungsrate
β = E(Barb ) · ̺−1 .
(v) Die mittlere Verweilzeit E(V ) im Wartesystem berechnet sich über die Little’schen Formeln:
1
E(L) = E(S).
E(V ) =
λeff
Für unser Beispiel erhält man mit λ = 1 und E[S] =
p∗0 = 0,2;
p∗1 = 0,4;
86
1
µ
= 2, d. h. µ = 12 :
p∗2 = 0,4
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
(i) P (zu überprüfendes neues Teil kann nicht überprüft werden) = p∗2 = 0,4
(ii) Durchschnittliche Anzahl arbeitender Qualitätsingenieure = ̺ · (1 − p∗2 ) =
2 · 0,6 = 1,2
(iii) Für den Erfassungsrate gilt:
β = E(Barb ) · ̺−1 =
(iv) Die effektive Ankunftsrate λeff beträgt:
1,2
= 0,6 =
b 60%
2
λeff = λ · β = 1 · 0,6 = 0,6.
6.6 Ein spezielles geschlossenes technisch-ökonomisches
Wartesystem vom Typ M|M|m
Hier wollen wir ein technisch-ökonomisches Wartesystem betrachten, bei dem eine begrenzte
Anzahl r von Kunden vorhanden ist, die allerdings mehrfach bedient werden können. Eine
solche „Mehrfachbedienung“ gibt es im folgenden Sinne:
Nur die r „Kunden“ können potentiell in das Wartesystem mit m Bedienstationen eintreten.
Die Eintritte erfolgen unabhängig voneinander. Tritt ein Kunde in das Wartesystem ein und
wurde dort (nach einer möglicherweise positiven Wartezeit) bedient, so kann er danach erneut
in das System eintreten, um bedient zu werden.
¹
¹
¹
Ein derartiges „geschlossenes“ Wartesystem liegt etwa bei der Instandhaltungsabteilung eines
Unternehmens vor, welche r Maschinen warten muss. Den Kunden enstprechen die einzelnen
der r Maschinen, die im Falle eines Schadens in das System eintreten, dort nach einer möglichen Wartezeit bedient (d. h. repariert) werden, nach der Reparatur wieder eine Zeit lang
arbeiten, um dann irgendwann wegen einer erneut fälligen Reparatur wieder in das Wartesystem einzutreten. Die Schadenseintritte der einzelnen Maschinen seien dabei voneinander
unabhängig.
87
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
Das Wartesystem bestehe also aus m Bedienstationen, welche jeweils einen Kunden bedienen
können. Falls eine Station frei ist, wird ein eintreffender Kunde sofort bedient, ansonsten reiht
er sich in die Warteschlange ein. Die Bedienzeit S eines Kunden sei exponentialverteilt mit
Bedienrate µ.
Die Ankunft eines Kunden kann aufgefasst werden, als sei er von einer eigenen „Kundenquelle“
(also etwa die Kundenquelle Nr. i) erzeugt worden. Nach dem „Erzeugen“ eines Kunden hat
diese Kundenquelle dann eine „Pause“, bis der von ihr erzeugte Kunde bedient wurde. Die
Zwischenankunftszeiten der Kunden aus den einzelnen Kundenquellen seien jeweils exponentialverteilt, alle mit dem gleichen Parameter λ. Eine „Kundenquelle“ Nr. i induziert also einen
(i)
Poisson’schen Ankunftsprozess (αt )t∈[0,∞[ mit Intensität λ , d.h.
(i)
P (αt = n) =
(λt)n −λt
e ,
n!
i = 1, 2, . . . , r.
Dieses Wartesystem soll nun analysiert werden.
Wir beachten zunächst: Können k der Kundenquellen noch Kunden erzeugen, 0 ≤ k ≤ r (die
übrigen r − k Kunden sind bereits im Wartesystem), so gilt für den stochastischen Prozess
(k)
(k)
(At )t∈[0,∞[ (At beschreibt die Anzahl der aus den k Kundenquellen erzeugten Kunden bis
zum Zeitpunkt t), wegen der Unabhängigkeit:
(k)
P (At
= n) = P
k
X
(i)
αt
=n
i=1
!
=
(k · λ · t)n −(k·λ)·t
·e
.
n!
D. h. die k Kundenquellen erzeugen Kunden, die gemäß einem Poisson’schen Ankunftsprozess
mit Parameter λ · k am Wartesystem eintreffen (siehe auch Satz ?? auf Seite ??). Wir setzen
nun r ≥ m voraus (damit überhaupt eine Warteschlange entstehen kann), betrachten wieder
die homogene Markov-Kette (Lt )t∈T mit Lt als Anzahl der Kunden im Wartesystem zum
Zeitpunkt t und interessieren uns für die Verteilung der Zufallsvariablen L (Anzahl der Kunden
im Wartesystem, wenn sich das System eingeschwungen hat).
Dies wollen wir wieder mit Hilfe des zugehörigen Markov-Graphen tun. Offenbar kann Lt , und
damit L, die Zustände 0, 1, . . . , m, . . . , r annehmen. Wir interessieren uns zunächst wieder für
die Übergangsintensitäten qi,i+1 =: λi und qi,i−1 =: µi . Aus den Überlegungen zum M |M |mSystem wissen wir bereits, dass
µi =
(
i · µ, i = 1, . . . , m
m · µ, i = m, . . . , r.
Für die λi stellen wir nun eine ähnliche Überlegung an: Befindet sich Lt im Zustand i, d. h.
88
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
i Kunden sind im Wartesystem, so gilt für einen kleinen Zeitraum h:
P (Lt+h = i + 1 | Lt = i)
= P (im Intervall [0, h] erzeugt genau eine der r − i Kundenquellen
genau einen Kunden, etwa den Kunden Nr. 1)
(j ∗ )
= P die kleinste der möglichen Zwischenankunftszeiten τ1
(j ∗ )
Kundenquelle j ∗ liegt im Intervall [0, h] und τ1
die übrigen Zwischenankunftszeiten
(j ∗ )
= P τ1
=
(j ∗ )
∧ τ1
r−i
X
n
(j ∗ )
+ τ2
(j ∗ )
P τ1
j ∗ =1
(j)
:= min τ1
+ τ2
n
o
(j)
(j ∗ )
+ τ2
o
| j ∈ {1, . . . , r − i} \ {j ∗ } > h
> h ∧ min τ1
(j ∗ )
> h und
liegen außerhalb von [0, h]
| j ∈ {1, . . . , r − i} ≤ h
≤ h ∧ τ1
n
(j)
τ1
einer
(j ∗ )
>h
o
(j)
∧ min τ1 | j ∈ {1, . . . , r − i} \ {j ∗ } > h
=
r−i
X
P τ1
r−i
X
P τ1
r−i
X
P τ1
≤ h ∧ τ1
= 1 | α0
j ∗ =1
=
j ∗ =1
=
j ∗ =1
=
r−i
X
r−i
X
(j ∗ )
(j ∗ )
(j ∗ )
(j ∗ )
P αh
j ∗ =1
=
(j ∗ )
≤ h ∧ τ1
(j ∗ )
≤ h ∧ τ1
(j ∗ )
(j ∗ )
(j ∗ )
+ τ2
(j ∗ )
+ τ2
(j ∗ )
+ τ2
r−i
Y
j=1
j6=j ∗
r−i
Y
>h ·
>h ·
(j)
P τ1
>h
e−λh
j=1
j6=j ∗
> h · e−λ(r−i−1)h
= 0 · e−λ(r−i−1)h
(λh · e−λh ) · e−λ(r−i−1)h
j ∗ =1
=
r−i
X
j ∗ =1
λh · e−λ(r−i)h
= λh(r − i) · e−λ·(r−i)·h
= λ(r − i)h + o(h).
Aus dieser Beziehung überlegen wir uns genauso wie im M |M |m-Fall, dass
λi = qi,i+1 = λ · (r − i),
i = 0, . . . , r − 1
gilt. Somit haben wir den Markov-Graphen (Schleifen
hier nicht eingezeichnet) . . .
. . . sind
(r−1)λ
(r−m)λ
(r−2)λ
(r−m+1)λ
rλ
0
1
µ
...
2
2µ
3µ
89
...
...
m
mµ
mµ
...
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
...
λ
2λ
...
...
r
r−1
mµ
mµ
und das Gleichungssystem Qp∗ = 0, mit dem eine stationäre Verteilung für die Zufallsvariable
L bestimmt werden kann. Man erhält:
µ · p∗1 − r · λ · p∗0 = 0
(r − i + 1) · λ · p∗i−1 − ((r − i) · λ + i · µ) · p∗i + (i + 1) · µ · p∗i+1 = 0,
(r − i + 1) · λ
· p∗i−1
− ((r − i) · λ + m ·
m·µ
· p∗r
µ) · p∗i
=λ
+m·µ
· p∗r−1 .
· p∗i+1
= 0,
i = 1, . . . , m − 1
m≤i≤r−1
Das Lösen dieses Gleichungssystems (bzw. Nutzung der Rekursion 5.4 in Satz 5.13, Seite 68)
ergibt mit der üblichen Setzung ̺ = µλ
p∗i =
wobei
m
X
p∗0 =
i=0
!
r
· ̺i · p∗0 ,
1≤i≤m
i
r!
· ̺i · p∗0 , m ≤ i ≤ r
i−m
m
· m! · (r − i)!
−1
r
X
r! · ̺i
r!
+
· ̺i
i−m
i! · (r − i)! i=m+1 m
· m! · (r − i)!
.
Die wesentlichen Kenngrößen für die ökonomische Beurteilung dieses geschlossenen technischökonomischen Wartesystems fassen wir nun wieder zusammen.
Satz 6.17
Gegeben sei ein technisch-ökonomisches Wartesystem vom Typ M |M |m mit Parametern λ
und µ, welches im obigen Sinne geschlossen sei. Es sei ̺ = µλ . Dann gilt für das System im
stationären Zustand:
(i) P (keine Bedienstation arbeitet) = p∗0 mit
p∗0 =
m
X
i=0
−1
r
X
r!
r! · ̺i
+
· ̺i
i−m
i! · (r − i)! i=m+1 m
· m! · (r − i)!
(ii) P (Alle Bediengeräte arbeiten) = P (L = m oder L = m + 1 oder . . . oder L = r)
=
=
r
X
p∗i
i=m
r
X
r!
· ̺i · p∗0
i−m · m! · (r − i)!
m
i=m
90
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
(iii) Für die durchschnittliche Anzahl E(Barb ) arbeitender Bedienstationen gilt:
E(Barb ) =
m
X
i=1
i · p∗i + m ·
r
X
i=m+1
p∗i .
(iv) Für die durchschnittliche Anzahl der Kunden im System gilt:
E(L) =
r
X
i=1
i · p∗i .
(v) Für die durchschnittliche Länge E(N ) der Warteschlange gilt:
E(N ) =
r
X
(i − m) · p∗i .
i=m+1
(vi) Für den Auslastungsgrad σ einer Bedienstation gilt:
m
r
X
i
E(Barb ) X
∗
=
· pi +
p∗i .
σ=
m
m
i=1
i=m+1
(vii) Für die durchschnittliche Ankunftsrate E(λ) ergibt sich
E(λ) =
r
X
i=0
λi · p∗i
=
r
X
i=0
(r − i)λ ·
p∗i
=λ·
r
X
i=0
r
· p∗i
−
r
X
i=0
i
· p∗i
!
= λ · (r − E(L)).
(viii) Die mittlere Wartezeit E(W ) in der Warteschlange bzw. die mittlere Verweilzeit E(V )
im System berechnet sich mittels der Little’schen Formeln (siehe: Kap. 4.4)
E(W ) =
1
· E(N )
E(λ)
bzw. E(V ) =
1
· E(L).
E(λ)
Beispiel 6.18
Der PC-Administrator Olaf E. hat zusammen mit seinem Kollegen Jens W. die Aufgabe, die
400 Rechner der WiSo Fakultät an der TU Dortmund zu warten. Im Falle eines Rechnerproblems erfolgt eine unmittelbare Mitteilung an den PC-Support und einer der beiden Mitarbeiter
beginnt sofort damit, sich des Problems anzunehmen. Natürlich nur, sofern er frei ist. Die Zeit,
die jeder der beiden gewöhnlich für eine solche Problembehebung benötigt, beträgt – unabhängig vom Rechner – durchschnittlich 1 Stunde und ist exponential verteilt. Die beiden arbeiten
pro Arbeitstag 8 Stunden.
Durchschnittlich hat jeder der Rechner 2 mal im Jahr (220 Arbeitstage) ein solches Problem,
wobei die Zeit zwischen dem Auftreten derartiger Defekte exponential verteilt ist.
• Wie groß ist der zeitliche Anteil, an dem beide Mitarbeiter mit Wartungsarbeiten be-
91
6 Wartesysteme mit „Einzelankünften“ und „Einzelbedienungen“
OR II c, Master-Modul IV
schäftigt sind?
• Wie groß ist der Zeitraum, an dem keiner der beiden Mitarbeiter mit Wartungsarbeiten
beschäftigt ist?
• Wie stark ist jeder der beiden Mitarbeiter ausgelastet?
• Wie viele Rechner machen pro Arbeitstag durchschnittlich Probleme?
• Wie groß ist der durchschnittliche „unerledigte Auftragsbestand“ eines Tages?
• Wie viel Zeit dürfen die beiden Mitarbeiter durchschnittlich für die Wartung eines Rechners aufwenden, damit dieser „unerledigte Auftragsgsbestand“ (erwartungsgemäss) halbiert werden kann?.
• Wie lange dauert es durchschnittlich bis ein gemeldetes Rechnerproblem wieder behoben
ist?
• Wie ändern sich die obigen Größen, wenn einer der beiden Mitarbeiter ausfällt?
• Wie ändern sich die Größen, wenn ein zusätzlicher, gleich qualifizierter Mitarbeiter eingestellt wird, um sich ebenfalls um die Rechnerwartung zu kümmern?
• Wie viele (gleich qualifizierte) Mitarbeiter müssten eingestellt werden, damit wahrend 6
Stunden eines Arbeitstages mindestens 90 % der Rechner arbeitsfähig sind?
• Wie ändern sich die Größen, wenn der Rechnerpool „aufgerüstet“ wird und statt 400 nun
500 Rechner zu warten sind?
• Wie groß ist in allen Fällen die Produktivität des Rechnerpools, wobei wir als Produktivitätsmaß den Quotienten
Produktivität =
Anzahl verfügbarer Rechner − Anzahl ausgefallener Rechner
Anzahl verfügbarer Rechner
verstehen ?
92
7 Wartesysteme mit Gruppenbedienungen
bzw. Gruppenankünften
In diesem Kapitel wollen wir bestimmte Typen technisch-ökonomischer Wartesysteme betrachten, welche in der Realität ebenfalls große Bedeutung besitzen. Häufig kommt es nämlich vor,
dass Kunden nicht einzeln, sondern „gruppenweise“ ankommen (z.B. Ankunft von Postsendungen eines geleerten Briefkastens in einem Briefverteilzentrum, Ankunft von Daten-Paketen
in den einzelnen Knoten eines Informationsnetzes, Warenanlieferung in den einzelnen Filialen
eines Supermarktes) und nach ihrer Ankunft dann einzeln oder ebenfalls in Gruppen bedient
werden.
Auch der Fall, dass die Kunden einzeln in das Wartesystem eintreten und dann gruppenweise von den Bedienstationen abgefertigt werden, kommt in der ökonomischen Wirklichkeit oft
vor (Ampeln, Personenbeförderungssysteme, bestimmte Fertigungsvorgänge bei der Produktion von Gütern).
Sowohl innerhalb des Ankunftsmusters als auch im Rahmen der Bedienung können die Größen
der Gruppen dabei konstant sein oder auch (zufällig) variieren.
Wir wollen uns in diesem Abschnitt auf die beispielhafte Analyse solcher Wartesysteme beschränken, auf die wir unsere bisherigen Ergebnisse und Analysemethoden ebenfalls anwenden
können.
7.1 Ein Wartesystem vom Typ M|M|1|K mit Gruppenbedienung
Betrachtet wird hier ein Wartesystem mit einer Bedienstation und der Kapazität K an Warteplätzen.
Die als ein Poisson-Prozess mit Ankunftsrate λ ankommenden Kunden warten dabei auf Bedienung, sofern die Bedienstation arbeitet, aber auch dann, wenn die Bedienstation frei ist und
die Warteschlange eine Länge kleiner als r − 1 hat. Sobald wartende Kunden eine „Gruppenstärke“ von r erreicht haben, beginnt die freie Bedienstation mit der Bedienung der gesamten
Gruppe. Die Bedienzeit S (für die Gruppe) ist dabei exponentialverteilt mit Erwartungswert
E(S) = µ−1 . Die Bedienung beginnt und endet gleichzeitig für alle Kunden der Gruppe. Ankommende Kunden können sich während der Bedienung einer Gruppe von Kunden der Warteschlange nur dann anschließen, sofern die maximale Warteplatzkapazität K noch nicht erreicht
ist. Wir setzen hier K ≥ r voraus, da sonst nie bedient würde).
Um ein derartiges Wartesystem mit den uns bekannten Techniken zu modellieren, betrachten wir wiederum die Zufallsvariable L =
b „Anzahl der Kunden im System im stationären
Zustand“.
93
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
L kann offenbar die Zustände 0, 1, 2, . . . , K + r annehmen. Ist L = i, so befinden sich im
Fall 0 ≤ i ≤ r − 1 i Kunden in der Warteschlange und die Bedienstation arbeitet nicht. Für
r ≤ i ≤ r +K werden r Kunden bedient und i−r ≤ K Kunden warten in der Warteschlange.
Wir erhalten damit den folgenden Markov-Graphen (die Intensitäten 1 − qii sind wieder weggelassen):
• 1≤i≤r−1:
von r + 1
0
µ
¸ λ ... ¸
r
r-1
µ
λ¸
¸λ
i
1
¹
¹µ
¹µ
¸ λ ... λ
¸
¸λ
von 2r + 1
von 2r
von 2r − 1
r+1
...
¹
µ
µ
• r ≤i≤K −1:
nach i − r − 1
¹
µ
λ ¸
nach i − r + 1
nach i − r
¹
µ
¸ λ ¸
µ
¸λ
λ¸
...
...
i-1
i+1
i
µ
µ
µ
von r + i − 1
von r + i
von r + i + 1
• K ≤i≤K+r :
nach i − r
nach K − r nach K + 1 − r
¸
λ
µ
...
K
λ ... ¸ λ µ
µ
λ ... λ
i
K+1
K+r
µ
Aus dem Markov-Graphen gewinnen wir wiederum das Gleichungssystem Qp∗ = 0. Es ergibt
sich durch (siehe Bemerkung 5.12 auf S. 67):
λ · p∗0
λ · p∗i
(λ + µ) · p∗i
(λ + µ) · p∗i
µ · p∗k+r
=
=
=
=
=
µ · p∗r
λ · p∗i−1 + µ · p∗i+r
λ · p∗i−1 + µ · p∗i+r
λ · p∗i−1
λ · p∗k+r−1 .
94
für 1 ≤ i ≤ r − 1
für r ≤ i ≤ K
für K + 1 ≤ i ≤ K + r + 1
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Daraus lassen sich nun wieder Kenngrößen des Wartesystems ermitteln.
Wir haben folgenden Satz.
Satz 7.1
Gegeben sei das oben beschriebene M |M |1|K Wartesystem mit Gruppenbedienung und den
Parametern λ, µ und r. Dann gilt im stationären Zustand:
(i) P (ein neu ankommender Kunde kann nicht bedient werden) = P (L = K + r) = p∗K+r
(ii) P (ein neu ankommender Kunde muss warten)
= P (L = 0 ∨ L = 1 ∨ . . . ∨ L = r − 2 ∨ L = r ∨ . . . ∨ L = K + r − 1)
= 1 − p∗K+r − p∗r−1 = (1 − p∗K+r ) − p∗r−1
= P (ein ankommender Kunde kann bedient werden)
−P (ein ankommender Kunde kann sofort bedient werden)
(iii) P (iKunden warten auf Bedienung) = P (L = i ∨ L = r + i) = p∗i + p∗r+i (falls i ≤ r
(iv) P (die Bedienstation arbeitet nicht) = P (L = 0 ∨ L = 1 ∨ . . . ∨ L = r − 1) =
(v) P (die Bedienstation arbeitet) = P (L = r ∨ L = r + 1 ∨ . . . ∨ L = K + r) =
(vi) P (unter der Bedingung, dass das System arbeitet, befinden sich i Kunden
in der Warteschlange)
= P (N = i| die Bedienstation arbeitet)
= P (N = i ∧ die Bedienstation arbeitet ) ·
= p∗r+i ·
K+r
P
j=r
p∗j
!−1
K+r
P
j=r
p∗j
r−1
P
i=0
K+r
P
i=r
p∗i
p∗i
!−1
(Formel für die bedingte Wahrscheinlichkeit)
(vii) Für die durchschnittliche Anzahl der Kunden im System gilt:
E(L) =
K+r
X
i=1
i · p∗i
(viii) Für die durchschnittliche Anzahl (an der Bedienstation oder in der Warteschlange oder
an beiden) wartender Kunden im System gilt:
E(Ñ ) =
r−1
X
i=0
i · p∗i +
K+r
X
i=r
(i − r) · p∗i
(ix) Für die durchschnittliche Anzahl W1 der Kunden, welche warten müssen, weil (d.h. unter
der Bedingung, dass) die Bedienstation arbeitet, gilt:
E(W1 ) = 1 · P (N = 1| die Bedienstation arbeitet)
+ 2 · P (N = 2| die Bedienstation arbeitet)
95
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
+ . . . + (K − r) · P (N = K − r| die Bedienstation arbeitet)
=
K+r
X
i=r
=
K+r
X
i=r
(i − r) ·
p∗i
!
(i − r) ·
p∗i
!
· P (die Bedienstation arbeitet)−1
·
K+r
X
i=r
p∗i
!−1
(x) Analog:
Für die durchschnittliche Anzahl W2 der Kunden, welche warten, weil (d.h. unter der
Bedingung, dass) die Bedienstation zwar frei ist, aber die Gruppenstärke von r noch
nicht erreicht wurde, gilt:
E(W2 ) =
r−1
X
i=0
!
i · p∗i ·
r−1
X
i=0
p∗i
!−1
7.2 Ein M|M|m|0 Wartesystem mit Gruppenbedienung
Wir betrachten hier ein technisch-ökonomisches Wartesystem mit m voneinander unabhängig
arbeitenden Bedienstationen.
Jede dieser Bedienstationen kann Kundengruppen der Größe r bedienen.
Die Kunden treten einzeln in das Wartesystem gemäß eines Poisson-Prozesses mit Rate λ ein,
können bedient werden, sofern eine Bedienstation frei ist, allerdings erst dann, wenn sich eine
Gruppe von r zu bedienenden Kunden eingefunden hat.
Sofern keine der m Bedienstationen frei ist, geht ein ankommender Kunde dem System verloren.
In dem vorliegenden, speziellen Fall, d. h. sofern alle m Bedienstationen arbeiten, ist „Warten“
(im strengen Sinne) also ausgeschlossen (K = 0).
Die Festlegung K = 0 bedeutet aber hier nicht, dass es keinerlei Möglichkeit gibt, auf Bedienung
zu warten. Eine freie Bedienstation besitzt in unserem Falle sogar r − 1 „Warteplätze“. Ein
ankommender Kunde kann – sozusagen– „an der Bedienstation warten“, bis eine Gruppe von
r zu bedienenden Kunden zusammengestellt ist.
Die Bedienzeiten seien exponentialverteilt mit dem (für alle m Bedienstationen gleichen) Parameter µ (Bedienrate).
Nach einer solchen „Gruppenbedienung“ verlassen die r bedienten Kunden einer Gruppe das
System wieder.
96
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Beispiel 7.2
Bei der Konzeption zur Gestaltung eines neuen Freizeitparks steht das Management vor einem
Entscheidungsproblem. Ankommende Besucher sollen die Möglichkeit erhalten, mit kleinen
Transportfahrzeugen durch den Park gefahren zu werden.
Für die Anschaffung dieser Transportfahrzeuge hat man die Angebote unterschiedlicher Unternehmen eingeholt und sich letztlich drei Varianten ins Auge gefasst, von denen eine ausgewählt
werden soll.
• 30 Fahrzeuge mit je 4 Sitzplätzen,
• 60 Fahrzeuge mit je 3 Sitzplätzen oder
• 80 Fahrzeuge mit je 2 Sitzplätzen
Kaufpreise und Unterhaltskosten für die einzelnen Wagen sind dem Parkmanagement bekannt,
genauso wie die Vorstellungen über den Preis, den ein Besucher für das Mitfahren in den einzelnen Transportfahrzeugen zahlen sollte.
Statistische Analysen haben ergeben, dass der Besucherstrom einem Poisson-Prozess entspricht
(λ = 200 Besucher pro Stunde) und die Fahrzeit als exponentialverteilt mit Mittelwert 32
min/Fahrt angenommen werden kann. Die Wagen fahren allerdings nur, wenn alle Plätze besetzt sind. Besucher, welche keinen freien Wagen vorfinden, müssen den Erlebnispark zu Fuß
erkunden
Für seine Entscheidung möchte das Management eine ökonomische Analyse der einzelnen in
Frage kommenden Varianten vornehmen und dazu zunächst eine Reihe von Kenngrössen ermitteln.
Es handelt sich bei den drei zu analysierenden Varianten offenbar um Wartesysteme vom Typ
M |M |m|0 mit Gruppenbedienung (im obigen Sinne), wobei in
Variante 1: m = 30, r = 4
Variante 2: m = 60, r = 3
Variante 3: m = 80, r = 2
gilt.
Für Wartesysteme des Typs M |M |m|0 mit Gruppenbedienung werden wir die Zufallsvariable
L=
b „Anzahl der Kunden im System im stationären Zustand“ etwas differenzierter beschreiben,
nämlich durch die beiden Zufallsvariablen
und
L1
L2
=
b
=
b
Anzahl der arbeitenden Bedienstationen
Anzahl der auf Bedienung wartenden Kunden
Offenbar ist dann L = r · L1 + L2 , wobei
L1 ∈ {0, 1, 2, . . . m}
L2 ∈ {0, 1, 2, . . . r − 1}.
Die Zustande der Zufallsvariable L des Wartesystems lässt sich dann eindeutig durch die beiden
Werte von L1 und L2 eindeutig beschreiben. Wir schreiben abkürzend (i, k) für den Zustand
(L1 = i, L2 = k).
97
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Um für dieses System charakteristische Kenngrössen zu bestimmen, interessiert uns zunächst
wiederum die stationäre Verteilung P (L1 = i, L2 = k) = p∗i,k .
Den Markov-Graphen diese Systems erstellen wir dann mit denselben Überlegungen, wie wir
sie früher schon gemact haben. (In der folgenden Darstellung ist der Zustand i, k für i = 0 und
i = m − 1 besonders hervorgehoben)
von z1,k
von z1,r−1
µ
λ
λ
...
λ
...
(0, r − 1)
nach zi−2,r−1 nach zi−1,0
(i − 1)µ
2µ
λ
(1, 0)
(1, 1)
...
(i, r − 1)
(i + 1, 0)
...
(m − 1, r − 1)
(m, 0)
nach zi−1,k
iµ
iµ
λ
λ
(i − 1, r − 1)
... λ
(i, 1)
(i, 0)
...
(i, k)
(i − 1)µ
iµ
(m − 2)µ
(m − 1)µ
(m − 2, r − 1)
...
(m − 1, 1)
(m − 1, 0)
(m − 1)µ
(m − 1)µ
(m − 1)µ
λ
λ
...
λ
µ
µ
...
λ
(0, k)
(0, 1)
(0, 0)
2µ
µ
λ
von z2,1
von z2,0
λ
...
(m − 1, k)
mµ
Aufgrund dieses Markov-Graphen lässt sich nun wiederum das Gleichungssystem Qp∗ = 0
aufstellen, aus dem die stationäre Verteilung, d. h. die Werte p∗i,k , berechnet werden kann.
98
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Es ergibt sich dann:
λ · p∗0,0 = µ · p∗1,0
λ · p∗0,k = λ · p∗0,k−1 + µ · p∗1,k
(iµ + λ) · p∗i,k = λ · p∗i,k−1 + (i + 1)µ · p∗i+1,k
(iµ + λ) · p∗i,0 = λ · p∗i−1,r−1 + (i + 1)µ · p∗i+1,0
((m − 1)µ + λ) · p∗m−1,k = λ · p∗m−1,k−1
m · µ · p∗m,0 = λ · p∗m−1,r−1
wobei zusätzlich p∗m,0 +
m−1
P
P r−1
i=0 k=0
k = 1, . . . r − 1
i = 1, 2, . . . m − 2,
k = 1, 2, . . . r − 1
i = 1, 2, . . . m − 1
k = 1, 2, . . . r − 1
p∗i,k = 1 gelten muss (Wahrscheinlichkeitsverteilung).
Eine in analytischer Form angebbare Lösung dieses Gleichungssystems (d. h. eine Darstellung
der p∗ik in Abhängigkeit von λ, µ, m und r) führt zu ausgesprochenen unübersichtlichen Formeln
und ist daher für die Darstellung hier unzweckmäßig. Also wird man das System Qp∗ = 0 stets
explizit lösen.
Bemerkung 7.3
a.) Im Fall m = 1 (d.h. es steht nur eine Bedienstation für die Gruppenbedienung zur
Verfügung) ergibt sich mit ̺ = µλ :
(i) P (ein ankommender Kunde kann nicht bedient werden)
= P (die Bedienstation arbeitet und kein Kunde wartet auf Bedienung)
= P (L1 = 1, L2 = 0) = p∗1,0 = (1 + r · ̺−1 )−1
(ii) P (k Kunden müssen auf die Bedienung warten)
= P (L1 = 0, L2 = k) = p∗0,k = ̺−1 · p∗1,0
b.) Falls m = 2 erhält man durch Lösen des entsprechenden Gleichungssystems:
(i) P (ein ankommender Kunde kann nicht bedient werden)
= P (beide Bedienstationen arbeiten und kein Kunde wartet auf Bedienung)
= P (L1 = 2, L2 = 0) = p∗2,0 = (1 + 2r · ̺−1 (1 + ̺−1 )r )−1
(ii) Der Fall, dass k Kunden auf eine Bedienung warten, liegt dann vor, wenn beide
Bedienstationen (noch) nicht arbeiten können, da die Gruppenstärke von r noch
nicht erreicht ist, oder eine Bedienstation arbeitet und für die zweite die erforderliche
Gruppenstärke noch unterschritten ist. Wir erhalten in diesen Fällen:
p∗0,k =
p∗1,k
2̺−1 (1 + ̺−1 )r − (1 + ̺−1 )r−k−1
1 + 2̺−1 r(1 + ̺−1 )r
2̺−1 (1 + ̺−1 )r−k−1
=
1 + 2̺−1 r(1 + ̺−1 )r
Wir fassen wiederum zusammen.
99
k = 0, . . . r − 1.
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Satz 7.4
Gegeben sei das oben beschriebene M |M |m|0 Wartesystem mit Gruppenbedienung und den
Parametern λ, µ und Gruppenstärke r. Dann gilt im stationären Zustand
(i) P (alle Bedienstationen arbeiten nicht) = P (L1 = 0) =
r−1
P
k=0
p∗0,k
(ii) P (ein neu ankommender Kunde kann bedient werden)
= 1 − P (ein ankommender Kunde kann nicht bedient werden)
= 1 − P (alle Bedienstationen arbeiten) = 1 − p∗m,0
(iii) P (ein neu ankommender Kunde muss warten)
= P (ein ankommender Kunde findet weniger als r − 1 wartende Kunden vor)
= P ((L1 = 0 ∨ L1 = 1 ∨ . . . ∨ L1 = m − 1) ∧ (L2 = 0 ∨ L2 = 1 ∨ . . . ∨ L2 = r − 2))
=
m−1
P
P r−2
i=0 k=0
p∗i,k = P (ein neu ankommender Kunde kann bedient werden) −
(iv) Für die durchschnittliche Anzahl der arbeitenden Bedienstationen gilt:
E(Barb ) =
m−1
X r−1
X
i
i=1
k=0
m−1
P
i=0
p∗i,r−1
p∗i,k + m · p∗m,0 .
(v) Für die durchschnittliche Anzahl wartender Kunden:
E(N ) =
r−1
X
k=1
k·
m−1
X
p∗i,k .
i=0
7.3 Ein M|M|m|K|SIRO Wartesystem mit Gruppenankünften
Wir betrachten hier ein technisch-ökonomisches Wartesystem mit m voneinander unabhängig
arbeitenden Bedienstationen und einer beschränkten Anzahl K von Warteplätzen.
Die Bedienstationen können jeweils einen Kunden bedienen (Einzelbedienung). Die Bedienzeiten sind exponentialverteilt mit dem für alle Stationen gleichem Parameter µ.
Eine Besonderheit des Wartesystems besteht darin, dass die Ankunft der Kunden gruppenweise
erfolgt, d.h. r > 0 Kunden treffen jeweils zum selben Zeitpunkt ein. Die (Gruppen)ankünfte
entsprechen dabei einer Poisson-Verteilung mit Parameter λ.
Sind bei Ankunft einer solchen Kundengruppe r oder mehr Bedienstationen frei, so werden alle
Kunden dieser Gruppe sofort (einzeln) bedient. Sind weniger als r Bedienstationen frei, so werden für diese freien Bedienstationen jeweils ein Kunde zufällig (entsprechend einer Gleichverteilung) ausgewählt und dann (einzeln) bedient, die restlichen Kunden müssen warten, sofern
die Warteschlange nicht größer als K wird.
100
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Würde die Warteschlange größer als K werden, so müssen so viele Kunden das System verlassen, dass die Warteschlange maximal die Größe K erreicht. Die Auswahl der Kunden, die das
System verlassen müssen erfolgt wiederum zufällig (entsprechend einer Gleichverteilung).
Beispiel 7.5
In einem Analysetool für Wertpapiere treffen entsprechend einem Poisson-Prozess mit der
Intensität λ = 4 [millisec−1 ] 30 Informationen über die einzelnen DAX-Werte ein.
Ein Rechner mit 48 voneinander unabhängig arbeitenden Prozessoren steht zur Verfügung, um
diese Informationspakete einzeln nach verschiedenen Kriterien auszuwerten und zu analysieren.
Die Verarbeitungszeit für ein Informationspaket ist exponentialverteilt mit einer (für sämtliche
Prozessoren identischen) Bedienrate µ = 8 [millisec−1 ]. Sind alle Rechner belegt, so können
eingehende Daten nicht weiterverarbeitet werden. Durch geeignete technische Maßnahmen,
z. B. entsprechende Dimensionierung der Anzahl der Rechner, soll erreicht werden, dass auf
lange Sicht gesehen der Anteil der Datenpakete, welche bei den Analysen nicht berücksichtigt
werden, auf unter 1% sinkt.
Um ein derartiges System allgemein zu analysieren, betrachten wir wieder die Zufallsvariable
L und den zugehörigen Markov-Graphen. Offenbar ist L ∈ {0, 1, . . . m, m + 1, . . . m + K}.
Für den Fall r ≤ m ergibt sich:
¸
¸
¸
i
...
2¹
¸
¸
(i+1)¹
i¹
¸
nach k+r
k
¸
nach m+r
m
...
(k+1)¹
von K+m¡1¡r
(r¡1)¹
von j¡r
m¹
m¹
¸
von K+m¡r
K+m¡1
K+m
m¹
m¹
von K+m¡1
von K+m¡2
..
.
von K+m¡r+1
¸
¸
..
.
¸
101
(r+1)¹
¸
¸
j
m¹
¸
r+1
r¹
...
¹
r
r¡1
nach j+r
...
1
k¹
nach 2r
¸
0
...
von k¡r
nach 2r¡1
...
¸
nach i+r
m¹
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Das sich hieraus ergebende Gleichungssystem für die Bestimmung der stationären Verteilungen
sieht dann folgendermaßen aus:
λ · p∗0
(i · µ + λ) · p∗i
(i · µ + λ) · p∗i
(m · µ + λ) · p∗i
m · µ · p∗K+m
=
=
=
=
=
µ · p∗1
(i + 1) · µ · p∗i+1
λ · p∗i−r + (i + 1) · µ · p∗i+1
λ · p∗i−r + m · µ · p∗i+1
P
λ · rj=0 p∗K+m−r+j
1≤i≤r−1
r ≤i≤m−1
m≤i≤m+K −1
Übung: Wie sieht der Markov-Graph bzw. das Gleichungssystem für den Fall r > m aus?
Wir erhalten auf diese Weise (für r ≤ m) die folgenden Ergebnisse.
Satz 7.6
Gegeben sei das Wartesystem vom Typ M |M |m|K mit Gruppenankünften und Einzelbedienung, sowie dessen Parameter λ, µ und r. Dann gilt:
(i) Die Wahrscheinlichkeit, dass nicht alle ankommenden Kunden bedient werden können:
P (nicht alle ankommenden Kunden können bedient werden)
= P (K + m − r + 1 ≤ L ≤ K + m)
= P (L = K + m − r + 1) + P (L = K + m − r + 2)
+ · · · + P (L = K + m − 1) + P (L = K + m)
=
r−1
X
p∗K+m−i
i=0
(ii) Die Wahrscheinlichkeit, dass ein bestimmter von allen ankommenden Kunden nicht bedient werden kann, weil er abgewiesen werden muss:
P (Ein bestimmter von allen ankommenden Kunden kann nicht bedient werden)
= P ((K + m − r + 1 ≤ L ≤ K + m) ∧ (der nicht bediente Kunde
gehört der ankommenden Gruppe an))
= P ((L = K + m − r + 1) ∧ (der nicht bediente Kunde der ankommenden Gruppe
ist der r-te Kunde der Gruppe))
+P ((L = K + m − r + 2) ∧ (der nicht bediente Kunde der ankommenden
Gruppe ist der r-te Kunde oder der (r − 1)-te Kunde der Gruppe))
...
+P ((L = K + m − 1) ∧ (der nicht bediente Kunde der ankommenden Gruppe
ist der r-te Kunde, der (r − 1)-te Kunde,. . . oder der zweite Kunde der Gruppe))
+P (L = K + m)
=
r
X
i=1
p∗K+m−r+i ·
i
r
102
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
(iii) Für die durchschnittliche Anzahl der arbeitenden Bedienstationen erhalten wir
E(Barb ) =
m
X
i
i=0
· p∗i
+m·
K
X
p∗m+i
i=1
(iv) Für die durchschnittliche Länge der Warteschlange ergibt sich:
K+m
X
E(N ) =
i=m+1
(i − m) · p∗i
(v) P (alle ankommenden Kunden können bedient werden) = 1 −
r−1
P
i=0
p∗K+m−i
(vi) P (mindestens einer der ankommenden Kunden muss auf Bedienung warten)
= P (alle ankommenden Kunden können bedient werden)
−P (alle ankommenden Kunden können sofort bedient werden)
= 1−
= 1−
r−1
P
i=0
r−1
P
i=0
p∗K+m−i − P (L = 0 ∨ L = 1 ∨ . . . ∨ L = m − r)
p∗K+m−i −
m−r
P
i=0
p∗i
7.4 Ein Wartesystem vom Typ M|Erl(µ, r)|1
Beispiel 7.7
In dem kleinen Unternehmen „Auto-Glas“ werden defekte Windschutzscheiben ausgewechselt.
Kunden kommen entsprechend einem Poisson-Prozess mit Rate λ = 6 Kunden pro Arbeitstag
(= 8 Stunden) an. Der einzige Mechaniker der für das Wechseln der Scheibe zur Verfügung
steht, baut die defekte Scheibe aus und anschließend die neue Windschutzscheibe wieder ein.
Die Aus- bzw- Einbauzeit einer Scheibe ist jeweils exponentialverteilt. Im Mittel benötigen die
beiden Tätigkeiten jeweils 30 Minuten.
Wir betrachten hier ein Wartesystem mit nur einer Bedienstation. Die Kunden kommen dabei
entsprechend einem Poisson-Prozess mit Parameter λ am System an, ihre Bedienung besteht
allerdings aus r nacheinander auszuführenden, stochastisch von einander unabhängigen „Bedienschritten“. Jeder dieser Bedienschritte hat eine exponentialverteilte Dauer deren Mittelwert jeweils (für alle Schritte gleich!) µ1 beträgt. Diese Tatsache impliziert, dass die „GesamtBedienzeit“ eines Kunden Erlang-verteilt ist mit den Parametern µ und r, also (siehe auch
Seite 22):
−λt
P (S ≤ t) = 1 − e
·
n−1
X
i=0
(λ · t)i
i!
103
!
und
E(S) =
r
.
µ
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Die Tatsache, dass sowohl die Zwischenankunftszeiten der Kunden als auch die Bedienzeiten
der einzelnen Bedienschritte exponentialverteilt sind(mit λ bzw. µ), führt dazu das System auf
kanonische Weise als Wartesystem mit Gruppenankünften der Grösse r aufzufassen: mit jeder
Kundenankunft kommen r abzuarbeitende Bedienschritte im System an.
Wir betrachten nun die Zufallsvariable
R = Anzahl der Bedienschritte, die sich im System befinden.
Offenbar gilt dann für die Anzahl L der Kunden im System
L=
R
.
r
Damit erhalten wir den folgenden Markov-Graphen für R:
λ
λ
λ
...
0
1
µ
...
...
2
µ
µ
...
r
µ
...
r+1
µ
...
µ
Über die sich daraus ergebende Intensitätsmatrix Q lässt sich nun wieder durch Qp∗ = 0 die
stationäre Verteilung ermitteln. Es gilt offenbar
λ · p∗0 = µ · p∗1
(λ + µ) · p∗i = µ · p∗i+1 ,
(λ + µ) ·
p∗i
=λ·
p∗i−r
i = 1, 2, . . . , r − 1
+ µ · p∗i+1 ,
i ≥ r.
Wir können damit zusammenfassen
Satz 7.8
Gegeben sei ein Wartesystem vom Typ M |Erl(µ, r)|1 mit Ankunftsrate λ. Es sei ̺ =
gilt
(i) Falls
λ · E(S) =
r·λ
= r · ̺ < 1,
µ
so existiert die stationäre Verteilung.
(ii) Es gilt
p∗0 = 1 − r · ̺.
104
λ
µ
Dann
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
(iii) Die durchschnittliche Anzahl der abzuarbeitenden Bedienschritte im System ergibt sich
durch
E(R) =
∞
X
i=0
i · p∗i .
(iv) Die mittlere Anzahl „wartender“ Bedienschritte im System errechnet sich als:
E(NR ) =
∞
X
i=1
(i − 1) · p∗i .
(v) Die durchschnittliche Wartezeit eines Kunden ergibt sich als
E(W ) =
1 − p∗0 r + 1 1
r·̺
r+1 1
· =
·
· .
·
p∗0
2
µ
1−r·̺
2
µ
(vi) Mit der Little’schen Formel ergibt sich dann für die durchschnittliche Anzahl wartender
Kunden:
E(N ) = λ · E(W ).
(vii) Die durchschnittliche Verweilzeit eines Kunden ergibt sich als
E(V ) = E(W ) + E(S) =
r+1 1
r
r·̺
·
· + .
1−r·̺
2
µ µ
(viii) Mit der Little’schen Formel ergibt sich dann für die durchschnittliche Anzahl Kunden im
System:
E(L) = λ · E(V ).
Bemerkung 7.9
(i) Die Grösse p∗0 in (ii.) ergibt sich auch indem man überlegt:
die erwartete Anzahl der im Zeitraum T ankommenden Kunden entspricht der Grösse
λ · T . Während dieses Zeitraums arbeitet die Bedienstation im Mittel (1 − p∗0 ) · T Zeiteinheiten. Pro E(S) Zeiteinheiten wird durchschnittlich ein Kunde bedient, so dass sich
1
.
die erwartete Anzahl der im Zeitraum T bedienten Kunden ergibt als (1 − p∗0 ) · T · E(S)
Da sich das System im stationären Zustand befindet sind beide Grössen identisch, d.h.
λ=
µ
1
· (1 − p∗0 ) = · (1 − p∗0 ),
E(S)
r
also
p∗0 = 1 − r · ̺.
(ii) Die Formel für die mittlere Wartezeit E(W ) eines Kunden in (v) überlegt man sich
folgendermassen (siehe auch Bemerkung 4.3 auf S. 45): ein „durchschnittlich“ ankommender Kunde muss zunächst warten, bis die Kunden, die vor ihm in der Warteschlange
stehen abgearbeitet wurden (das sind im Mittel E(N ) Kunden); jeder hat eine durchschnittliche Bedienzeit E(S) = µr ). Dazu kommt (sofern die Bedienstation arbeitet) als
Wartezeit die Zeit E(TRest ), die durchschnittlich benötigt wird, bis Bearbeitungsschritte
105
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
des sich gerade in Bearbeitung befindenden Kunden alle abgearbeitet sind. Also beträgt
die durchschnittliche Wartezeit
E(W ) = E(N ) ·
r
+ (1 − p∗0 ) · E(TRest ).
µ
Sofern die Bedienstation arbeitet, arbeitet sie mit Wahrscheinlichkeit 1r am ersten Bedienungsschritt, bis zum Ende der Bearbeitung des Kunden müssen also alle r Bearbeitungsschritte noch bearbeitet werden. Mit Wahrscheinlichkeit 1r bearbeitet die Station gerade
den zweiten Bedienungsschritt, bis zum Ende der Bearbeitung des Kunden müssen also
noch r − 1 Schritte bearbeitet werden. Etc, etc.
Da jeder Bearbeitungsschritt die mittlere Dauer µ1 hat ergibt sich für E(TRest ):
1
r
1
=
r
E(TRest ) =
=
r
1 r−1
1
+ ·
+ ··· + ·
µ r
µ
r
r
X
1
1 r · (r + 1)
·
k· = ·
µ
r
2
k=1
·
1
µ
·
1
µ
r+1 1
· .
2
µ
Mit der Little’schen Formel E(N ) = λ · E(W ) regibt sich somit
E(W ) =
r·̺
r+1 1
1 − p∗0 r + 1 1
·
· =
·
· .
∗
p0
2
µ
1−r·̺
2
µ
(iii) Oft wird in Wartesystemen anstatt von eine exponentialverteilten (Gesamt-)Bedienzeit
S mit Erwartungswert
1
E(S) := ′
µ
davon ausgegangen, dass sich die Bedienung aus einer Anzahl von r „kleineren“, hintereinander auszuführenden, stochastisch von einander unabhängigen Bedienungsschritten
additiv „zusammensetzt“. Vom jedem dieser Bedienungsschritte wird dann angenommen,
dass seine Dauer exponentialverteilt ist und den Mittelwert
E(S)
1 1
1
:=
= · ′
µ
r
r µ
besitzt.
Für die mittlere Gesamtbedienzeit gilt dann – da S Erlang-verteilt ist – E(S) = r ·
1
1
r · r·µ
′ = µ.
1
µ
=
Mit diesem „Trick“ modelliert man in der Praxis oft Situationen, bei denen man zwar
E(S) = µ1′ „beobachten“, nicht aber unbedingt „Gedächnislosigkeit“ bei der (Gesamt-)
Bedienzeit S annehmen kann. Erlang-Verteilungen haben die Eigenschaft der Gedächtnislosigkeit (für r > 1) bekanntlich nicht. Trotzdem kann man in diesem Fall, wie eben
gesehen, die Technik der Markov-Graphen für die Bestimmung von stationären Verteilungen anwenden.
106
7 Wartesysteme mit Gruppenbedienungen bzw. Gruppenankünften
OR II c, Master-Modul IV
Beispiel 7.10
Hier greifen wir die Bemerkung 3.4 auf S. 29 auf. Dort hatten wir gesehen, dass für eine
exponentialverteilte Zufallsvariable Z mit Parameter µ′ ca. 63 % ihrer Realisationen unterhalb
ihres Erwartungswertes E(Z) = µ1′ liegen. Dies ist oftmals in der Realität nicht gegeben, da
häufig auch „längere“ Bedien- oder Zwischenankunftszeiten beobachtbar sind.
Modelliert man nun die Zufallsvariable Z nicht als exponentialverteilt, sondern Erlang-verteilt,
3
etwa mit Parametern r = 3 und Erwartungswert E(Z) = µ1′ = §·µ
′ , dann rechnen wir mit
′
µ := 3 · µ aus:
−µ·E(Z)
P (Z ≤ E(Z)) = 1 − e
!
µ · E(Z) (µ · E(Z))2
+
)
· (1 +
1
2
= 1 − e−3 · (1 + 3 + 4, 5) = 1 − 8, 5 · 0, 0497
≈ 0, 57
In einer solchen Modellierung liegt also Die Wahrscheinlichkeit, dass Z einen Wert annimmt,
der kleiner als ihr Mittelwert E(Z) ist, nur mehr ca. 57%.
107
8 Netzwerke von Wartesystemen
Im Folgenden wollen wir eine Menge von Wartesystemen betrachten, welche innerhalb eines
„Netzwerkes“ miteinander in Beziehung stehen.
~ = (V, E, c) mit V = V1 ∪· V2 , in dem
Zu Grunde gelegt sei dabei ein gewichteter Digraph G
die Knoten v ∈ V1 die Bedeutung von Wartesystemen im Sinne der früher behandelten Wartesysteme haben (d. h. gegeben sind durch ein Ankunfts- bzw. Bedienmuster im Sinne der
Kendall’schen Charakterisierung).
Darüber hinaus seien mit v ∈ V2 diejenigen Knoten ausgezeichnet, die keine Wartesysteme
repräsentieren sollen, sondern potentielle (Kunden)quellen q, q1 , q2 , . . . bzw. eine Senke s beschreiben, die das Eintreten der Kunden in bzw. das Austreten der Kunden aus dem Netzwerk
darstellen.
Eine Kante e = (vi , vj ) ∈ E spiegelt die Tatsache wieder, dass ein Kunde nach Verlassen des
Wartesystems vi unmittelbar in das Wartesystem vj eintreten kann. Die Größe c(e) = c((vi , vj ))
beschreibt dabei die Wahrscheinlichkeit, mit der er dies tut.
Quellen
q1
v1
c12
v2
c25
c55
q2
q
q3
v3
v7
v5
q4
s
Senke
v6
v4
Derartige Netzwerke von Wartesystemen treten in der technisch-ökonomischen Realität natürlich viel häufiger auf als „einzelne“ Wartesysteme. So, etwa innerhalb von Produktionssystemen,
Supermärkten etc. Wir wollen in diesem Kapitel analysieren, wie wir auf Grund der Informationen über die einzelnen Wartesysteme Aussagen über die charakteristischen Kenngrößen des
gesamten Systems gewinnen können.
8.1 Ein elementares Netzwerk
Wir betrachten dazu zunächst den einfachsten Fall eines solchen Netzwerkes mit zwei hintereinander angeordneten einzelnen Wartesystemen, in denen sich jeweils nur eine Bedienstation
befindet:
108
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
Folgende Annahmen werden dabei zu Grunde gelegt:
• v1 ist ein M |M |1-System mit Ankunftsrate λ1 , Bedienrate µ1 und ρ1 =
λ
µ1
< 1.
• Alle aus v1 austretende Kunden treten unmittelbar in das Wartesystem v2 ein. v2 verfügt
über ∞-grosse Kanpazität
• In v2 werden die Kunden ebenfalls mit exponentiell verteilter Bedienzeit von der Bedienstation/den Bedienstationen bedient (Bedienrate µ2 ).
• Nach erfolgter Bedienung im System v2 verlassen die Kunden das Netzwerk in die Senke
s hinein.
Nach ihrer Bedienung im System v1 treten die Kunden mit Wahrscheinlichkeit 1 in das Wartesystem v2 ein.
Mit dem Satz von Burke (siehe Satz 4.6, S. 52) wissen wir, dass Kunden entsprechend einem
Poisson-Prozess mit Rate λ im System v2 ankommen.
Da beide Wartesystem v1 und v2 M |M |1-System sind, können wir, falls ̺2 =
Wartesystem separat auf bekannte Weise analysieren.
λ
µ2
< 1, jedes
Beschreiben L1 ≥ 0 bzw. L2 ≥ 0 die Anzahl der Kunden im System v1 bzw v2 , so wissen wir
nämlich:
∗(1)
pi
∗(2)
pi
λ i
λ
·
= (1 − ̺1 ) · ̺i1 , i = 0, 1, . . .
:= P (L1 = i) =
1−
µ1
µ1
j
λ
λ
:= P (L2 = i) =
1−
·
= (1 − ̺2 ) · ̺j2 , j = 0, 1, . . . .
µ2
µ2
Nun sind aber nicht die beiden einzelnen, sondern das aus v1 und v2 bestehende Netzwerk zu
analysieren.
Um dies zu tun, beschreiben wir mit dem Paar L = (L1 , L2 ) den Zustand der beiden Wartesysteme im stationären Zustand, und interessieren uns für die stationäre Verteilung P (L1 , L2 ),
d.h.
p∗(i,j) = P (L1 = i, L2 = j), i, j ≥ 0.
Um diese Größen zu bestimmen, gehen wir wieder wie üblich vor und stellen zunächst einen
entsprechenden Markov-Graphen auf, der die Zustände bzw. Übergänge und Intensitäten innerhalb der möglichen Zustände (L1 , L2 ) im Netzwerkes beschreibt: wir erhalten etwa so für
den Fall, dass i > 0 und j > 0 den folgenden Ausschnitt aus dem Markov-Graphen:
109
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
(i,j¡1)
(i¡1,j¡1)
¹2
(i¡1,j)
¸
(i,j)
¹1
¸
(i+1,j)
¹2
¹1
(i¡1,j+1)
(i+1,j¡1)
(i,j+1)
(i+1,j+1)
Man beachte, dass (wegen i > 0) die Übergänge von (i, j) nach (i−1, j +1) bzw. von (i+1, j −1)
nach (i, j) jeweils mit der Übergangsrate µ1 erfolgen und nicht mit der „Austrittsrate“ λ1 , da
für diese Zustände in v1 bedient wird (siehe Punkt 1 der Bemerkung 4.7).
Übung: Bitte ergänzen Sie den Ausschnitt des Markov-Graphen um die Zustände mit i = 0,
bzw. j = 0.
Als nächstes muss daraus das zugehörige Gleichungssystem aufgestellt werden. Dazu erinnern
wir uns, dass wir im Kapitel über Markovketten (Bemerkung 5.12, S. 67) gesehen hatten,
dass in jedem Zustand einer homogenen Markovkette für die stationären Verteilungen und die
Übergangsraten eine Art „Flusserhaltung“ gilt.
Für unsere Situation ergibt sich somit:
(λ + µ1 + µ2 ) · p∗(i,j) = λ · p∗(i−1,j) + µ1 · p∗(i+1,j−1) + µ2 · p∗(i,j+1) ,
i, j > 0.
(Übung: Bitte ergänzen Sie dieses Gleichungssystem mit den Gleichungen, die zu den Fällen
i = 0 bzw. j = 0 gehören.)
Dieses Gleichungssystem könnte man nun unter Berücksichtigung, dass
∞ X
∞
X
p∗(i,j) = 1
i=0 i=j
gilt, lösen. Andererseits kann man es sich (in diesem speziellen Fall), „einfacher“ machen, und
die Randverteilungen betrachten.
Man kann nämlich leicht zeigen, dass
p∗(i,j) = P (L1 = i) · P (L2 = j),
i, j ≥ 0
die Gleichungen in obigem Gleichungssystem erfüllen, und somit eine Lösung für die stationäre
Verteilung P (L1 , L2 ) darstellen (Übung!).
Man kennt also die gemeinsame Verteilung von (L1 , L2 ) des (kleinen) Netzwerkes, sofern man
die Verteilungen von L1 bzw. L2 in den Wartesystemen v1 bzw. v2 kennt.
Diese Tatsache lässt sich nun verallgemeinern.
110
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
8.2 Offene Netzwerke von Wartesystemen
Wir betrachten nun ein Netzwerk von Wartesystemen mit einem zugrunde liegenden Digraph
~ = (V, E, c) ohne Schlingen. Dieser besitze eine einzige Quelle q („Kundenquelle“, „Eingang“
G
in das Netzwerk) und eine Senke s („Ausgang“ aus dem Netzwerk.
Kunden treten von q direkt in die Wartesysteme vk , k = 1, 2, . . . , N ein. In diesem Sinne sei
das Netzwerk „offen“. Die weiteren Annahmen sind:
• Jedes Wartesystem habe mk gleichrtige Bedienstationen.
• Die Zwischenankunftszeit τ der von außen gesamthaft in das Netzwerk eintretenden Kunden sei exponentialverteilt mit Parameter λ (Poisson-Prozess).
• Die Wahrscheinlichkeit, dass ein von aussen ankommender Kunde direkt das Wartesystem
vk betreten sei cq,k . Für mindestens ein k gelte cq,k > 0.
• Die Bedienzeitenen der Bedienstation im Wartesystem vk seien exponentialverteilt mit
Parameter µk und voneinander unabhängig.
• Nach Verlassen des Wartesystems vk wählt der Kunde mit Wahrscheinlichkeit ck,t das
Wartesystem vt , in das er als nächstes eintritt, oder er verlässt das System mit Wahrscheinlichkeit ck,s .
• Für jedes Wartesystem vk gilt: es gibt mindestens einen Weg von q nach vk bzw. einen
~
Weg von vk nach s in G.
λ · cq,k
ck,t
λ1 · c1,k
µk
λk
λ2 · c2,k
λk
ck,s
Wir betrachten zunächst die „Gesamt-Ankunftsrate“ λk im Wartesystem vk , welche sich aus
den einzelnen Ankunftsraten λ · cq,k , λ1 · c1,k , λ2 · c2,k , . . . , λn · cn,k zusammensetzt.
~ keinen Kreis enthält (es handelt sich also in einem
Wenn wir wüssten, dass das Netzwerk G
solchen Fall um ein Netzwerk von Wartesystemen, bei dem ein Kunde ein einmal besuchtes
Wartesystem nicht erneut besuchen kann) so liefert Satz 2.18 (Seite 18 und der Satz von Burke
(S. 52), dass für jedes Wartesystem vk im Netz der Ankunftsprozess ein Poisson-Prozess mit
Parameter λk ist. Die Ankunftsrate λk des Poisson-Prozesses am Wartesystem vk ergibt sich in
diesem Fall additiv aus den (aufgeteilten, d.h. mit ci,k gewichteten) Austrittsraten der einzelnen
111
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
Poisson-Prozesse (Burke) der Vorgängerwartesysteme von System vk . Wir machen daher den
Ansatz
λk = λ · cq,k +
n
X
j=1
cj,k · λj , k = 1, 2, . . . , n,
(8.1)
bzw. für die Senke (wegen cq,s = 0)
(8.2)
n
X
(8.3)
λ = λs =
j=1
cj,s · λj .
Zur Bestimmung der Größen Λ = (λ1 , . . . , λn ) ist also dieses lineare Gleichungssystem zu
lösen!
Sind die Werte λk auf diese Weise berechnet, lassen sich für jedes Wartesystem vk (sofern dort
die Stabilitätsbedingung ̺k = µλkk < mk erfüllt sind) die stationären Verteilungen
p∗lk := P (Lk = lk ), lk ∈ {0, 1, . . . }
angeben. Nun betrachten wir wiederum die Größe L als „Anzahl der Kunden im Netzwerk
im stationären Zustand“. Dann wird L beschrieben durch L = (L1 , L2 , . . . , Ln ), wobei Lk die
„Anzahl der Kunden im Wartesystem vk “ beschreibt. Wir interessieren uns wieder für eine
stationäre Anfangsverteilung P (L = l), wobei l = (l1 , l2 , . . . , ln ) ist. Diese ergibt den folgenden
Satz von Jackson ([17]):
Satz 8.1
Gegeben sei ein offenes Netzwerk von Wartesystemen mit obigen Annahmen.
Dann gilt im stationären Zustand:
P (L = l) = p∗l1 · p∗l2 · · · p∗ln
Beweis: Der Beweis des Satzes orientiert sich an völlig analogen Überlegungen, die wir im
Falle zweier hintereinander angeordneter einzelner Wartesysteme bereits gemacht haben. Allerdings bestehen hier die einzelnen Zustände nicht aus Paaren (l1 , l2 ), sondern aus n−Tupeln
(l1 , l2 , . . . , ln ).
T
Bezeichnen wir ei mit (0, . . . , 0, 1(i) , 0, . . . , 0) und P (L = l + ei ) mit P (L = (l1 , l2 , . . . , li +
T
1, li+1 , . . . , ln ) ). Dann ergibt sich mit der „Flusserhaltungsüberlegung“ und der Indikatorfunktion
(
1, li > 0
1{li >0} :=
0, li = 0
112
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
der folgende Zusammenhang:
λ
Pn|{z}
c ·λ
i=1 q,i
= λ·
+
·P (L = l) +
n
X
n
X
i=1
1{li >0} · µi · P (L = l)
cq,i · P (L = l − ei ) +
i=1
n X
n
X
i=1 j=1
n
X
ci,s · µi · P (L = l + ei )
i=1
cj,i · µj · P (L = l + ej − ei )
Wiederum ist hier die linke Seite der „Fluss“ aus Zustand l, die rechte Seite der Fluss in
P
den Zustand l hinein. Einsetzen der Gleichungen λ · cq,i = λi − nj=1 λj · cj,i in den ersten
Summanden der rechten Seite liefert
λ · P (L = l) +
n
X
=
i=1
i=1
1{li >0} · µi · P (L = l)
λi · P (L = l − ei ) −
n
X
+
n
X
i=1
n X
n
X
i=1 j=1
ci,s · µi · P (L = l + ei ) +
λj · cj,i · P (L = l − ei )
n X
n
X
i=1 j=1
cj,i · µj · P (L = l + ej − ei ).
Wenn wir nun als „Versuch“ den Ausdruck P (L = l) = p∗l1 · p∗l2 · · · p∗ln betrachten, so lassen sich
mit Hilfe der expliziten Darstellung der p∗li die Relationen
λi · P (L = l − ei ) = 1{li >0} · µi · P (L = l),
λj · P (L = l − ei ) = µj · P (L = l − ei + ej )
und
λi · P (L = l) = µi · P (L = l + ei )
nachweisen. (Übung!)
Das Einsetzen dieser Relationen in die rechte Seite liefert dann
λ · P (L = l) +
=
n
X
i=1
+
n
X
i=1
1{li >0} · µi · P (L = l)
1{li >0} · µi · P (L = l) −
n
X
i=1
ci,s · λi · P (L = l) +
n X
n
X
i=1 j=1
n
n
XX
i=1 j=1
cj,i · µj · P (L = l + ej − ei )
cj,i · µj · P (L = l + ej − ei ).
Wir erhalten damit
λ · P (L = l) = P (L = l) ·
n
X
i=1
ci,s · λi ,
P
was offenbar in unserem Netzwerk von Wartesystemen erfüllt ist (λ = ni=1 ci,s · λi ).
Also erfüllt der Ausdruck P (L = l) = p∗l1 · · · p∗ln die für das Netzwerk bestimmende Flusserhaltungsgleichung und stellt damit eine Lösung dar.
113
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
Bemerkung 8.2
(i) Das Netzwerk verhält sich also im stationären Zustand so, als wäre es aus unabhängig
voneinander operierenden M |M |mk -Systemen „zusammengesetzt“ (Produktdarstellung
der stationären Anfangsverteilung). Die Ankunftsraten λk der einzelnen Wartesysteme
werden dabei über das Gleichungssystem bestimmt. Dies bedeutet dann natürlich, dass
man charakteristische Kenngrößen der einzelnen Systeme mit den bisher gelernten Methoden ermitteln kann.
(ii) Falls die Bedienraten µk des Systems vk zustandsabhängig vom Zustand Lk sind, d. h.
µk = µk (j), dann gilt mit
p∗lk = P (Lk = 0) · Ql
|
{z
p∗l
k =0
}
λlkk
j=1 µk (j)
k
ebenfalls die Produktdarstellung in der Lösung, wobei für lk ∈ {0, 1, 2, . . . } gilt.
(iii) Damit sichergestellt ist, dass der Ankunftsprozess am Wartesystem vk ein Poisson~ kreisfrei ist.
Prozess ist, muss der der dem Netzwerk zu Grunde liegende Digraph G
Man betrachte etwa folgendes Netzwerk von 2 Wartesystemen, welches einen Kreis (Schlinge) enthält.
®¢¸1
q
¸
¹
¸1
(1¡®)¢¸1
s
Obwohl die Zwischenankunftszeiten in das Gesamtsystem und von außen in das Wartesystem vk exponentialverteilt sind (Parameter λ bzw. cq,k · λ), gilt i. Allg. nicht, dass
die Ankunftsprozesse am Wartesystem ebenfalls Poisson-Prozesse sind: es lässt sich für
0 < α < 1 zeigen, dass zwar
λ1 = λ + α · λ1 , d. h. λ1 =
λ
1−α
Kunden durchschnittlich pro Zeiteinheit am System vk ankommen (Ankunftsrate λ1 ),
aber die Ankünfte dort keinen Poisson-Prozess beschreiben.
Allerdings: Im Satz von Jackson wird diese Voraussetzung nicht benötigt. Man muss
nur die Ankunftsrate λk kennen. Obwohl die Ankuftsprozesse an vk nicht Poisson-verteilt
sein müssen (bei vorliegen eines Kreises) verhält sich dieser Ankunftsprozess an vk für
die Bestimmung der stationären Verteilung aber so, als wäre er ein Poisson-Prozess mit
Ankunftsrate λk .
Wesentliche Voraussetzung ist „nur“, dass der externe Ankunftsprozess an die Wartsyteme ein Poisson-Prozess ist.
Wir erhalten also insgesamt das folgende Resultat:
114
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
Satz 8.3
Gegeben sei ein offenes Netzwerk von Wartesystemen in obigem Sinne. Dann gilt:
(i) Die Verkehrsintensität ̺j des Wartesystems vk ergibt sich als
̺k =
λk
.
µk
(ii) Für die mittlere Anzahl aller Kunden im Netzwerk gilt:
E(L) =
n
X
E(Lk ).
k=1
(iii) Die durchschnittliche Gesamtverweilzeit eines Kunden E(V ) im gesamten Netzwerk ergibt sich über die Little’sche Formel:
n
n
n
1 X
λi
1
1 X
1 X
.
E(V ) = E(L) = ·
E(Li ) = ·
λi E(Vi ) = ·
λ
λ i=1
λ i=1
λ i=1 µi − λi
(iv) Die durchschnittliche „Restverweilzeit“ E(ViRest ) eines in das Wartesystem vi eintretenden Kunden ermittelt sich als
E(ViRest ) := E(Vi,s ) = E(Vi ) +
n
X
j=1
wobei
E(Vi ) =
ci,j · E(VjRest ),
1
1
1
1
E(Li ) =
·
=
.
λi
1 − ̺i µi
µ i − λi
(Es handelt sich hierbei um ein Gleichungssystem mit n Gleichungen und n Unbekannten
E(Vi,s )).
(v) Für die mittlere Anzahl aller im Netzwerk wartenden Kunden gilt:
E(N) =
n
X
E(Nk ).
k=1
(vi) Die durchschnittliche Gesamtwaretezeit eines Kunden E(V ) im gesamten Netzwerk ergibt
sich über die Little’sche Formel:
E(W ) =
n
n
1
1 X
1 X
λk E(Wk ).
E(N) = ·
E(Ni ) = ·
λ
λ i=1
λ k=1
(vii) Die durchschnittliche „Restwartezeit“ E(WiRest ) eines in das Wartesystem vi eintretenden Kunden ermittelt sich als
E(WiRest ) := E(Wi,s ) = E(Wi ) +
n
X
j=1
115
ci,j · E(WjRest ),
8 Netzwerke von Wartesystemen
OR II c, Master-Modul IV
wobei
E(Wi ) =
1
E(Ni ).
λi
(Auch hier handelt sich um ein Gleichungssystem mit n Gleichungen und n Unbekannten
E(Wi,s )).
116
9 Wartesysteme mit Prioritäts-Bedienung
Hier betrachten wir ein Wartesystem mit r verschiedenen Kundenquellen Q1 , Q2 , . . . , Qr , welche gemäß einer Poisson-Verteilung mit den Parametern λ1 , λ2 , . . . , λr verschiedene Kundentypen erzeugen. Bei der Bedienung habe der Kundentyp Nr. i Vorrang vor dem Kundentyp
Nr. j, falls i < j, d. h. Kunden aus Qi werden also bevorzugt bedient gegenüber den Kunden
aus Qj . Die Qi -Kunden haben also eine höhere Priorität als Qj -Kunden. Für jeden Kundentyp
gebe es eine (eigene)Warteschlange mit Kapazität Ki .
Zwei Bedienungssituationen können nun unterschieden werden:
(i) Bedienung mit Unterbrechung:
Bei Ankunft eines Kunden mit höherer Priorität wird – sofern alle Bedienstationen arbeiten – die Bedienung eines Kunden niedrigster Priorität abgebrochen (Kunde verlässt
das System) oder unterbrochen (Kunde geht in seine Warteschlange zurück). Zu einem
späteren Zeitpunkt kann er dann erneut (von Beginn an) bedient werden oder es erfolgt
seine Restbedienung, und zwar dann, wenn kein Kunde höherer Priorität mehr wartet.
(ii) Bedienung ohne Unterbrechung:
Bei Ankunft eines Kunden k höherer Priorität werden – sofern alle Bedienstationen arbeiten – zunächst alle bestehenden Bedienungen weitergeführt. Der ankommende Kunde
muss also warten, unabhängig von seiner Priorität. Sobald dann eine Bedienstation frei
wird, beginnt die Bedienung desjenigen Kunden, der die höchste Priorität hat.
9.1 Das System M|M|m|K1 = 0, K2 = 0|Prio| – mit Unterbrechung
Wir haben Kundenquellen Q1 , Q2 mit Ankunftsraten λ1 , λ2 und exponentialverteilten Zwischenankunftszeiten. An sämtlichen m Bedienstationen können beide Kundentypen bedient
werden. Die Bedienzeit ist jeweils exponentialverteilt mit der Rate µ1 (falls der Kunde aus Q1
kommt) bzw. µ2 (falls der Kunde aus Q2 kommt).
Arbeiten sämtliche Bedienstationen, so geht ein ankommender Kunde aus Q2 dem System
verloren. Ein Kunde aus Q1 geht dem System verloren, falls sämtliche Bedienstationen die
Kunden aus Q1 bearbeiten. Bedient jedoch mindestens eine Station einen Kunden aus Q2 , so
wird dessen Bedienung zugunsten des Kunden aus Q1 abgebrochen. Der Kunde aus Q2 verlässt
das System.
Betrachte Anzahl Kunden Lk vom Typ k im System, wobei k ∈ {1, 2}. Dann haben wir die
beobachtbaren Zustände (L1 = i, L2 = j) = zij , mit 0 ≤ i, j ≤ m und i + j ≤ m.
Aufstellen der Markov- Graphen liefert:
117
9 Wartesysteme mit Prioritäts-Bedienung
λ1
z00
µ2
λ2
λ1
µ1
λ2
λ1
zm−1,0
zm,0
mµ
1
λ2
λ1
zm−1,1
2µ1 z20
z10
µ2
λ2
z01
λ2
OR II c, Master-Modul IV
z11
2µ2
2µ2
z02
z12
3µ2
3µ2
z21
z22
zi,m−i
λ2
z0,m−1
z1,m−1
λ2 mµ2
λ1
z0,m
Wir erhalten für p∗i,j = P (L1 = i, L2 = j) das folgende Gleichungssystem:
(λ1 + λ2 ) · p∗0,0 = µ1 · p∗1,0 + µ2 · p∗0,1
(λ1 + i · µ1 + λ2 ) · p∗i,0 = λ1 · p∗i−1,0 + (i + 1) · µ1 · p∗i+1,0 + µ2 · pi,1 ,
(λ1 + i
m · µ1 · p∗m,0
(λ1 + λ2 + j · µ2 ) · p∗0,j
(λ1 + m · µ2 ) · p∗0,m
· µ1 + λ2 + j · µ2 ) · p∗i,j
(λ1 + i · µ1 + (m − i) · µ2 ) ·
(1 ≤ i ≤ m)
= λ1 · p∗m−1,0 + λ1 · p∗m−1,1
= λ2 · p∗0,j−1 + (j + 1) · µ2 · p∗0,j+1 + µ1 · p∗1,j , (1 ≤
= λ2 · p∗0,m−1
= λ1 · p∗i−1,j + (i + 1) · µ1 · p∗i+1,j
+ (j + 1) · µ2 · p∗i,j+1 , (i ≥ 1, j ≥ 1, i + j < m)
p∗i,m−i = λ1 · p∗i−1,m−i+1
+ λ1 · p∗i−1,m−i + λ2 · p∗i,m−i−1 , (1 ≤ i ≤ m)
j < m)
Bemerkung 9.1
Betrachtet man ausschließlich die Kunden vom Typ Nr. 1, so beschreibt das obige Bedienungsmuster ein Wartesystem vom Typ M |M |m|0, d. h. für die stationäre Verteilung P (L1 = i) = p∗i
haben wir p∗i = p0 ·
̺i1
i!
(mit ̺1 =
λ1
µ1 ).
Andererseits gilt natürlich auch p∗i =
Pm−i
j=0
p∗i,j .
Bemerkung 9.2
Für die spezielle Situation m = 1 liefert das obige Gleichungssystem im Fall λ2 + µ2 6= µ1 für
die stationären Wahrscheinlichkeiten
µ1 · (λ1 + µ2 )
p∗00 =
(λ1 + µ1 ) · (λ1 + λ2 + µ2 )
λ1
p∗10 =
λ1 + µ1
λ2 · µ 1
p∗01 =
(λ1 + µ1 )(λ1 + λ2 + µ2 )
118
bzw. im Fall λ2 + µ2 = µ1 :
(λ1 + µ2 ) · µ1
(λ1 + µ2 )2
λ1
=
λ1 + µ 1
λ2 · µ 1
=
.
(λ1 + µ1 )2
p∗00 =
p∗10
p∗01
Wir erhalten in dieser Situation als charakteristische Kenngrößen im stationären Zustand z. B.:
(i) P (Bedienstation arbeitet nicht) = p∗00 .
(ii) P (Kunde Typ 2 kann nicht zu Ende bedient werden)
= P (Im Intervall [0, t] kommt ein Kunde vom Typ 1 an
| die Bedienzeit eines Kunden vom Typ 2 ist t)
R
= 0∞ (1 − e−λ1 t ) · µ2 e−µ2 t dt
R
= 1 − µ2 0∞ e−(λ1 +µ2 )t dt
2
1
= 1 − λ1µ+µ
= λ1λ+µ
.
2
2
(iii) P (Kundtentyp 2 wird bis zu Ende bedient) =
µ2
λ1 +µ2 .
9.2 Das System M|M|m|K1, K2|Prio| – mit Unterbrechung
Wieder seien zwei Kundenquellen Q1 , Q2 mit Ankunftsraten λ1 , λ2 und exponentialverteilten
Zwischenankunftszeiten gegeben. An sämtlichen m Bedienstationen können beide Kundentypen bedient werden. Die Bedienzeiten seien jeweils wieder exponential-verteilt mit Parameter
µ1 (für Q1 -Kunden) bzw. µ2 (für Q2 -Kunden).
Bedienen sämtliche Bedienstationen Q1 -Kunden, so reiht sich ein ankommender Qi -Kunde in
seine Warteschlange ein, sofern deren Kapazität Ki noch nicht überschritten ist (andernfalls
geht er dem System verloren). Bedient bei Belegung aller Bedienstationen allerdings eine der
Stationen gerade einen Kunden aus Q2 , so wird dessen Bedienung sofort zugunsten eines ankommenden Kunden aus Q1 abgebrochen. Der Kunde aus Q2 verlässt in diesem Fall das System
ohne fertig bedient zu sein.
Betrachte wieder Anzahl Kunden Lk vom Typ k im System, wobei k ∈ {1, 2}. Dann haben wir
die beobachtbaren Zustände (L1 = i, L2 = j) = zij , mit 0 ≤ i, j ≤ m und i + j ≤ m.
Der zugehörige Markov-Graph sieht dann folgendermassen aus:
120
0, 1
0, K2
¹
mµ2
¸
¹
mµ2
λ2
¹
0, m + K2
¸
0, m + K2 − 1
λ2
µ1
λ1
¸
µ1
λ1
µ1
λ1
µ1
K2 µ2 λ1
2µ¸ 2
µ2
0, m + K2 − 2
λ2
λ2
λ2
λ2
µ1
¸
¸
¸
λ1
¸
¸
2µ1
mµ2
1, m + K2 − 1
λ2
¸
λ1
2µ1
λ1
2µ1
λ1
2µ1
mµ2
1, m + K2 − 2
λ2
¸
1, K2
¸
1, 1
1, 0
...
¹
¹
¹
¹
¹
¹
¹
¸
¸
λ1
¸
λ1
¹
3µ1
λ1
3µ1
λ1
3µ1
mµ2
2, m + K2 − 2
¹
λ2
¸
2, 1
2, 0
¸
2, K2
¹
...
λ1
...
¹
¹
m − 1, 1
¸
λ1
¸
¸
¹ λ1
m − 1, K2 + 1
¸
m − 1, K2
(m − 1)µ1
λ1
¹
(m − 1)µ1
λ1
¸
m − 1, 0
(m − 1)µ1
λ1
m − 2, K2 + 2
λ2
¹
¹
¹
¸
...
¸
¹
mµ1
λ1
mµ1
λ1
mµ1
λ1
¹
¹
¸
m, 1
m,
¹ 0
λ1
m,¹ K2
...
¸
mµ1
λ1
mµ1
λ1
mµ1
λ1
¹
¹
¹
mµ1
λ1
mµ1
λ1
mµ1
λ1
¹
m + K1 , 1
m +¹ K1 , 0
¸
m + K1 , K2
¸
...
0, 0
...
...
...
...
...
...
λ1
...
...
...
¸
λ2
λ2
λ2
9 Wartesysteme mit Prioritäts-Bedienung
OR II c, Master-Modul IV
10 Anhang: Eine kleine Einführung in die
Simulation
Aus Sicht des Operations Research ist Simulation die Nachahmung der Realität durch Modelle
auf einem Rechner. Gründe für den Einsatz von Rechnersimulationen sind:
• Das vollständige mathematische Optimierungsmodell ist nicht verfügbar (Vorhersage des
Wetterverlaufs) bzw. nicht entwickelbar (durch zu hohe Kosten).
• Die verfügbaren analytischen Methoden machen vereinfachte Annahmen erforderlich, die
den Kern des eigentlichen Problems verfälschen.
• Die verfügbaren analytischen Methoden sind zu kompliziert bzw. mit zu hohem Aufwand
verbunden.
• Die Durchführung realer Experimente ist zu komplex bzw. zu kostspielig (z. B. Windkanaltests von Prototypen).
• Die Beobachtung realer Systeme oder Prozesse ist zu gefährlich (Verhalten von Atomreaktoren), zu zeitaufwendig (Kursverhalten über längere Perioden auf Aktienmärkten)
oder mit irreversiblen Konsequenzen verbunden.
Definition 10.1
Eine Simulation ist eine Methode zur Modellierung und Analyse von Systemen mit Hilfe von
Rechnern.
Ein bestehendes Modell eines (technisch-ökonomischen) Systems wird mit bestimmten (meist
zufälligen) Inputs bestückt und die damit zusammenhängenden Outputs werden beobachtet.
Man unterscheidet
• deterministische Simulation:
zur Lösung deterministischer Probleme, für die keine Standardverfahren existieren (erweiterte Tourenplanungsprobleme)
• stochastische Simulationen:
– für die Lösung von Problemen mit Zufallseinflüssen
– in Abhängigkeit von den Zufallseinflüssen (Zufallsvariablen oder stochastische Prozesse) unterscheidet man weiter zwischen diskreter Simulation und stetiger Simulation.
Damit bedeutet der Begriff der Simulation ein auf Rechenanlagen durchgeführtes gesteuertes
statistisches Zufallsexperiment.
121
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
10.1 Simulation von Zufallsexperimenten
Für die Simulation von Zufallsexperimenten benötigt man Zufallsvariablen einer bestimmten
Verteilung, z. B. der Exponential- oder der Normalverteilung. Grundsätzlich ist es möglich,
Zufallszahlen beliebiger Verteilungen zu erzeugen. Dies geschieht in der Praxis über bestimmte
Transformationen von gleichverteilten Zufallszahlen.
Die Generierung der Zufallszahlen erfolgt über deterministische Algorithmen, die eine endliche
Folge sog. Pseudozufallszahlen erzeugen. „Echte Zufallszahlen“ existieren nur als theoretische
Konzepte. Man versucht, diese durch Modellierung physikalischer Prozesse nachzuempfinden,
man erreicht aber auch so nicht die sog. „real randomness“.
Von zu generierenden Zufallszahlen werden verschiedene, wesentliche Gütekriterien erwartet:
• Unabhängigkeit: Die Elemente einer jeden Teilfolge erzeugter Zufallszahlen sollten paarweise unabhängig sein (sog. „serielle Autokorrelation“)
• Gleichverteilung: Die Verteilung der erzeugten Zahlen sollte im Hinblick auf die Generierung gleichverteilter Zufallszahlen auch wirklich gleichverteilt im Intervall [0, 1] sein.
• Besetzungsdichte: Deterministische Algorithmen erzeugen lediglich eine endliche Zahl
verschiedener „Zufallszahlen“ (sog. Periodizität/Zyklenlänge). Es müssen also hinreichend viele unterschiedliche Zufallszahlen zur möglichst lückenlosen Besetzung des gewünschten Intervalls erzeugt werden.
• Reproduzierbarkeit: Ein (deterministischer) Algorithmus sollte unter gleichen Startbedingungen (Initialisierung) bei erneutem Lauf auch identische Zufallszahlen generieren.
Das Erzeugen von Zufallszahlen geschieht in der Praxis in zwei Stufen, wie es im Folgenden
dargestellt wird.
Stufe 1: Erzeugen von im Intervall [0, 1] gleichverteilter Zufallszahlen durch geeignete Algorithmen:
• linearer Kongruenz-Generator
• inverser Kongruenz-Generator
• linearer Rekursion-mod2-Generator
• Kombination der obigen Generatoren
Stufe 2 : Transformation einer oder mehrerer auf dem Intervall [0, 1] gleichverteilter Zufallszahlen in die gewünschte Verteilung durch geeignete Verfahren:
• Inversionsmethode (stetig oder diskret)
• Rejektionsmethode/Verwerfungsmethode (stetig, normal)
• Kompositionsmethode (alle)
• Alias-Methode (diskret)
122
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
Man unterscheidet deshalb im Allgemeinen zwischen gleichverteilten Zufallszahlen (engl.
uniform random numbers) und nicht-gleichverteilten Zufallszahlen (engl. nonuniform random numbers oder random variates).
10.2 Verfahren zur Erzeugung gleichverteilter Zufallszahlen
10.2.1 Linearer Kongruenz-Generator (Methode der linearen Kongruenz)
Definition 10.2
Es sei M ∈ N groß, a ∈ N mit 1 ≤ a < M und c ∈ ZM := {0, 1, . . . , M − 1}. Dann erhält man
nach der Wahl einer Initialisierungsgröße v0 ∈ ZM durch die Vorschrift
vn+1 = (a · vn + c)
mod M
mit un := vMn für n = 0, 1, . . . eine Folge u0 , u1 , . . . auf dem Intervall [0, 1] annähernd gleichverteilter Zufallszahlen.
M bezeichnet man dabei als Modulus und a als Multiplikator. Für c = 0 spricht man von einem sog. multiplikativen Kongruenz-Generator. Alle drei Parameter bestimmen die statistische
Qualität des Generators.
Folgende Nachteile bzw. Schwächen können beobachtet werden:
• Als Rest kommen nur positive ganze Zahlen und die 0 in Frage; das Vorliegen der Gleichverteilung in [0, 1] ist somit an sich schon in Frage zu stellen.
• Periodizität: Da das Verfahren eine neue Zufallszahl auf Grundlage ihres Vorgängers
generiert, entsteht ein Zyklus, sobald eine generierte Zufallszahl erneut benutzt wird (es
gilt per(un ) = per(vn ) ≤ M , wobei mit per(un ) von nun an die maximale Periodenlänge
bezeichnet werden soll).
• Hyperebeneneigenschaft: Alle mit einem linearen Kongruenz-Generator erzeugten Folgen von Zufallszahlen haben die Eigenschaft, dass, wenn man je q aufeinanderfolgende
Glieder einer Folge von Zufallszahlen als Punkte eines q-dimensionalen Einheitswürfels
1
auffasst, diese auf höchstens (q!M ) q parallelen Hyperebenen liegen. Man hat also streng
genommen keine Zufälligkeit.
Beispiel:
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
0.2
0.4
0.6
0.8
1
x =170x mod 509
i+1
0
0
0.2
0.4
0.6
x =59x mod 509
i
i+1
123
i
0.8
1
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
Daher werden gewisse Empfehlungen für die Wahl der Parameter gegeben. Der Modulus M
sollte groß sein und entspricht daher meistens der Word-Länge des Rechners als M = 232 oder
M = 231 − 1. Der Multiplikator a sollte „weder zu groß noch zu klein“ sein.
Wichtig: Die Periodenlänge per(vn ) sollte groß sein, d. h. am besten einem vollen Zyklus M
entsprechen. Ist sie kleiner als M , so können große oder irreguläre Löcher auftreten, was für
die Gleichverteilung unerwünscht ist.
Satz 10.3
Eine durch einen linearen Kongruenz-Generator erzeugte Folge von Zufallszahlen besitzt dann
und nur dann die maximale Periode M , falls
a) c und M teilerfremd sind,
b) a = 1 mod p gilt für jede Primzahl p, die M teilt,
c) a = 1 mod 4 gilt, wenn M ein Vielfaches von 4 ist.
Beweis: siehe [18, § 3.2.1]
Die folgenden drei „Standardeinstellungen“ haben sich für die praktische Implementierung als
sinnvoll erwiesen (per(un ) nahe M ).∗
• M ist prim, a ist primitive Wurzel modulo M , c = 0 und v0 6= 0 (⇒ wegen vn = an y0
mod M für n = 0, 1, . . . , dass per(un ) = M − 1).
• M = 2q für q ∈ N, a = 5 mod 8, c ist ungerade (⇒ per(un ) = M ).
• M = 2q , a = 5 mod 8, c = 0, y0 ungerade (⇒ per(un ) =
M
4 ).
Damit ergeben sich zum Beispiel weitläufig genutzte Werte:
• M = 231 − 1, a = 75 = 16.807 0der a = 630.360.016
(APL System von IBM, IMSL, SIMPL/I, Simscript II5, DEC-20 Fortran-System)
• M = 231 , m = 235 mit a = 513 (populär in den Sechzigern: man hat per(un ) = 233 )
• M = 233 − 1, a = 950.706.637, a = 742.938.285, a = 1.226.874.159, a = 62.089.911,
a = 1.343.714.438
10.2.2 Inverser Kongruenzgenerator
Definition 10.4
Sei M ∈ N groß, prim, a ∈ N, 1 ≤ a < M und c ∈ ZM := {0, 1, . . . , M − 1}. Dann erhält man
nach Wahl von v0 ∈ ZM über die Vorschrift
vn+1 := (a · v̄n + c) mod M
mit un := vMn für n = 0, 1, . . . eine Folge u0 , u1 , . . . auf dem Intervall [0, 1] annähernd gleichverteilter Zufallszahlen. Dabei ist v̄n das zu vn inverse Element in der multiplikativen Restklassengruppe modulo M , d. h. v̄n ist diejenige ganze Zahl aus {1, . . . , M − 1}, die mit vn multipliziert
den Rest 1 nach Division durch M ergibt.
∗
a ist primitives Element/Wurzel modulo M ⇒ ai − 1 ist Vielfaches von M nur für i = M − 1, aber für kein
kleineres i.
124
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
Der Vorteil des inversen Kongruenzgenerators ist, dass er nicht an der Hyperebeneneigenschaft
leidet. Allerdings benötigt er etwa die 18-fache Rechenzeit!
10.3 Erzeugung nicht gleichverteilter Zufallsvariablen
Grundlage für die Erzeugung nicht gleichverteilter Zufallsvariablen bilden die auf dem Intervall
[0, 1] gleichverteilten Zufallszahlen.
10.3.1 Allgemeiner Ansatz/Inversionsmethode
Es sei U ∼ U (0, 1) eine gleichverteilte Zufallsvariable auf [0, 1]. (Zur Erinnerung: Für U gilt
dann P (U ≤ u) = u). Weiterhin sei X eine Zufallsvariable mit bestimmter/gewünschter Verteilung, die nur Werte im Intervall ]a, b[∈ R annimmt. Für X sei FX die Verteilungsfunktion,
die auf ]a, b[ streng monoton wachsend und stetig ist. Dann besitzt FX die Inverse FX−1 und
für die (0, 1)-gleichverteilte Zufallsvariable gilt
P (X ≤ x) = FX (x) = P (U ≤ FX (x)) = P (FX−1 (U ) ≤ x).
Man nimmt daher eine Folge u0 , u1 , . . . in [0, 1] gleichverteilter Zufallszahlen und erhält über
FX−1 (un ) = xn für n = 0, 1, . . .
eine Folge x0 , x1 , . . . von mit der gewünschten Verteilung verteilten Zufallszahlen.
FX(x)
1
Verteilungsfunktion
un
x
xn
Wir betrachten einige Beispiele:
• Gleichförmige Verteilung:
kurze Erinnerung zur Dichte- und Verteilungsfunktion:
f (x) =
⇒ FX (x) =
Z
x
(
1
b−a ,
0,
f (x) ds =
a≤x≤b
sonst
Z
x
a
−∞
125
1
x−a
ds =
.
b−a
b−a
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
Daher erhält man über die Transformationsgleichung z = FX (x), also
z=
x−a
b−a
und schließlich durch Auflösen nach x, dass
x = a + (b − a)z.
• Exponentialverteilung:
Erinnerung zur Dichtefunktion:
f (x) =
(
0,
x<0
λe−λx , x ≥ 0
und zur Verteilungsfunktion
FX (x) = 1 − e−λx .
Daher erhält man über z = FX (x) mit
z = 1 − e−λx
und nach Auflösen nach
1
x = − ln(1 − z)
λ
exponentialverteilte Zufallszahlen.
Bemerkung: Ebenso wie z ist 1 − z in [0, 1] gleichverteilt. Man kann daher 1 − z durch z
ersetzen. Wegen z ≤ 1 gilt ln(z) ≤ 0 und man erhält als verwendbare Transformationsfunktion schließlich
1
x = | ln z|.
λ
• Diskrete Verteilungen:
Für diskrete Zufallsvariablen X ist die Verteilungsfunktion FX gegeben durch die Summe
der Einzelwahrscheinlichkeiten als
FX (x) =
X
pk
k:xk ≤x
mit pk = P (X = xk ) und ergibt anschaulich eine Treppenfunktion, die an jeder Stelle xk
eine Stufe der Höhe pk hat. Durch Projektion dieser Stufen auf die Ordinatenachse erhält
man eine Aufteilung des Einheitsintervalls. Für eine gleichverteilte Zufallszahl zk sucht
man nun das zugehörige Teilintervall und erhält darüber die gewünschte Realisierung xk .
Das folgende Beispiel soll die Erzeugung der Zufallszahlen diskreter Verteilungen verdeutlichen.
Pk
pk
xk
i=0 pi Teilintervalle für z
0 10%
10%
0 − 0, 1
1 25%
35% 0, 1 − 0, 35
85% 0, 35 − 0, 85
2 50%
95% 0, 85 − 0, 95
3 10%
4 5%
100% 0, 95 − 1
126
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
z
1
0,95
0,85
zk
0,35
0,1
1
3
2
xk
4
5
x
Problem: Die Suche nach der Zugehörigkeit zu einem Teilintervall ist von der Zeitkomplexität O(n), für großes n damit sehr aufwändig.
10.3.2 Rejektions-/Verwerfungsmethode
Die gerade vorgestellte Inversionsmethode kann u. U. sehr aufwendig sein und setzt die Kenntnis der Verteilungsfunktion voraus. Die Verwerfungsmethode vermeidet die Inversion der Verteilungsfunktion und benutzt ausschließlich die Dichtefunktion. Sie benötigt im Allgemeinen
aber zwei oder mehrere gleichförmig verteilte Zufallszahlen zur Generierung einer Zufallszahl
der gewünschten Verteilung.
Es sei X eine stetige Zufallsvariable, deren Dichtefunktion f beschränkt und nur auf einem
beschränkten Intervall [a, b] positiv ist. Weiterhin sei
c := max{f (x) | a ≤ x ≤ b}
bestimmt. Dann erhält man eine Zufallszahl der gewünschten Verteilung über folgendes Vorgehen:
1. Generiere eine gleichverteilte Zufallszahl z1 auf dem Intervall [a, b].
2. Generiere eine gleichverteilte Zufallszahl z2 auf dem Intervall [0, c].
3. Setze x = z1 , falls z2 ≤ f (z1 ), andernfalls gehe zu i).
10.3.3 Verfahren zur Erzeugung spezieller Zufallszahlen
Weiß man, dass sich Zufallsvariablen auf einfachere Weise aus Zufallsvariablen anderer Verteilungen zusammensetzen lassen, so bieten sich daraus spezielle Verfahren zur Generierung von
Zufallszahlen an.
127
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
Beispielhaft soll im folgenden die Poisson-Verteilung kurz betrachtet werden:
• Poisson-Verteilung:
Treffen mit mittlerer Rate λ irgendwelche n Ereignisse A rein zufällig ein, sodass der
zeitliche Abstand je zweier aufeinanderfolgender Ereignisse unabhängig und exponentialverteilt ist mit Mittelwert λ1 , dann ist die Zahl der in einem bestimmten Zeitintervall
der Länge t eintreffenden Ereignisse eine poisson-verteilte Zufallsvariable mit Mittelwert
λ. Man kann daher aus exponentialverteilten Zufallszahlen leicht poisson-verteilte gewinnen, indem fortlaufend exponentialverteilte Zufallszahlen τi aufaddiert werden bis die
Summe t überschreitet. D. h. ist
k
X
i=1
k+1
X
τi ≤ t <
τi ,
i=1
dann ist k eine mit Parameter λ · t poisson-verteilte Zufallszahl.
10.3.4 Gütetests der erzeugten Verteilungen
Die generierten Zufallszahlen sind stets auf die Güte der Gleichverteilung zu überprüfen. Das
geschieht durch eine Reihe von Stichprobenverfahren, von denen ein einfaches und bekanntes der sog. χ2 -Test (gesprochen: Chi-Quadrat-Test) ist. Mit diesem Test wird anhand einer
Stichprobe überprüft, ob eine Zufallsgröße X einer Normalverteilung genügt.
10.3.4.1 χ2 -Verteilung
Es seien n stochastisch unabhängige, (0,1)-normalverteilte Zufallsvariablen X1 , X2 , . . . , Xn gegeben. Dann heißt die Verteilung der Zufallsvariablen
2
χ :=
n
X
Xi2
i=1
χ2 -Verteilung mit Freiheitsgrad n. Die Verteilungsfunktion wird mit Fχ2 (x), die Dichtefunktion
mit fχ2 (t) bezeichnet und sind gegeben als
und
t
n
1
t 2 −1 e− 2 , t > 0
n
fχ2 (t) =
2 Γ( 2 )
0,
t≤0
n
2
1
Fχ2 (x) = P (χ ≤ x) = n n
2 2 Γ( 2 )
2
Z
x
n
t
t 2 −1 e− 2 dt,
x>0
0
mit Γ(x) als Gammafunktion, die als sog. Euler’sches Integral 2. Gattung gegeben ist durch
Γ(x) =
Z
∞
e−t tx−1 dt,
x>0
0
und der Eigenschaft Γ(x + 1) = x · Γ(x). Für ganzzahlige Werte x = n = 0, 1, . . . erhält man
gerade Γ(n) = (n − 1)!. Insofern erreicht man durch die Gammafunktion die Ausweitung des
Fakultätsbegriffs auf beliebige Zahlen x.
128
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
Für den Erwartungswert und die Varianz der χ2 -Verteilung gilt
E(χ2 ) = n,
V ar(χ2 ) = 2n.
Für das Verständnis des χ2 -Tests ist weiterhin der Begriff des Quantils nötig. Als α-Quantil
χ2α,m der χ2 -Verteilung mit Freiheitsgrad m bezeichnet man denjenigen Wert χ2α,m , für den
P (χ2 ≥ χ2α,m ) = α
mit einem vorgegebenen Signifikanzniveau α. Kleine Signifikanzniveaus α (1 %, 5 %) nennt man
häufig auch Irrtumswahrscheinlichkeit. Abbildung 10.1 verdeutlicht den Begriff des Quantils.
fχ2 (t)
α
χ2α,m
t
Abbildung 10.1: Darstellung des α-Quantils der χ2 -Verteilung mit Freiheitsgrad m
10.3.4.2 χ2 -Anpassungstest für die Gleichverteilung
Als χ2 -Anpassungstest bezeichnet man die Prüfung einer gewählten Stichprobe hinsichtlich
eines gegebenen Signifikanzniveaus α in Bezug auf die Hypothese, die Grundgesamtheit ist
(0,1)-normalverteilt.
Für die Überprüfung einer Folge von Zufallszahlen u1 , u2 , . . . , un auf die Güte der (0,1)Gleichverteilung ist daher folgende Vorgehensweise notwendig.
a) Unterteile das Intervall ]0, 1[ in s disjunkte Teilintervalle ]t0 = 0, t1 [, [t1 , t2 [, . . . , [ts−1 , ts =
1[.
b) Bestimme nun, wie viele der beobachteten Messwerte (hier die generierten Zufallszahlen)
im jeweiligen Teilintervall liegen. Mit τ̺ bezeichne die Anzahl der Glieder der Zufallszahlenfolge im Teilintervall [t̺−1 , t̺ [ für ̺ = 2, . . . , s bzw. ]t̺−1 , t̺ [ für ̺ = 1.
c) Bestimme über τ̺̄ := (t̺ − t̺−1 ) · n den Erwartungswert für die Zugehörigkeit eines
Messwertes (einer Zufallszahl) zum ̺-ten Teilintervall für ̺ = 1, . . . , s, falls eine (0,1)Gleichverteilung vorliegt.
d) Für große n besitzt die Prüfgröße
v :=
s
X
(τ̺ − τ̺̄ )2
̺=1
129
τ̺̄
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
näherungsweise eine χ2 -Verteilung mit Freiheitsgrad s − 1 unter der Voraussetzung, dass
min̺=1,...,s τ̺̄ ≥ 5. Ist diese Voraussetzung nicht erfüllt, fasse benachbarte Intervalle zusammen.
Es sei χ2α,m das tabellierte α-Quantil der χ2 -Verteilung mit Freiheitsgrad s − 1. Dann
wird mit der vorgegebenen Irrtumswahrscheinlichkeit α die Hypothese „Gleichverteilung
der Zufallszahlenfolge“ abgelehnt, wenn
v > χ2α,m
gilt.
130
Literaturverzeichnis
[1] Anossowa, N. N. et al.: Bedienungstheorie, Teubner-Verlag, Leipzig, 1986
[2] Asmussen, S.: Applied probability and queues, Springer, New York, 2003
[3] Baccelli, F.;Bremaud, P.: Elements of queuing theory: Palm martingal calculus and stochastic recurrence, Springer, New York, 2003
[4] Bascharin, I. K. et al.: Handbuch der Bedienungstheorie I, II, Akademie Verlag, Berlin,
1983
[5] Berenson, M.L.; Levine D.M.; Krehbiel, T.C.: Basic business statistics. Concepts and
applications, 10th ed., Prentice Hall, Upper Saddle River, 2006
[6] Bolch,G.; Greiner, S,; de Meer,H.; Shridharbhai,K.S.: Queuing networks and Markov
chains,Wiley, New York, 1998
[7] Bose,S. An introduction to queuing systems,Kluwer, New York, 2001
[8] Bronson, R.: Theory and Problems of Operations Research, McGraw-Hill Inc., 1982
[9] Burke, P.: The Output of a Queuing System, Operations Research, Vol. 4, 1956, 699–704
[10] Giambene, G.: Queuing theory and telecommunications: Network and applications, Springer, New York, 2005
[11] Gross,D.; Shortle,J.;Thompson,J.;Harris,C.: Fundamentals of queuing theory,Wiley, New
York, 2008
[12] Hall, P. W.: Queuing Methods for Services and Manufacturing, Prentice Hall, Englewood
Cliffs, 1991
[13] Hartung, J.; Elpelt, B.; Klösener, K.H.: Statistik: Lehr- und Handbuch der angewandten
Statisitk, (14. Aufl.), München, 2005
[14] Helles, W. D. et al.: Stochastische Systeme, Berlin, New York, 1978
[15] Hennet, J.-C.; Arda, Y.: Supply Chain coordination; a game theoretic approcach, Engineering Applications of Artificial Intelligence Volume 21, Issue 3, 2008,399–405
[16] Hillier, F. S.; Lieberman, G. J. : Introduction to Operations Research, McGraw-Hill Inc.,
2005
[17] Jackson, J. R.: Networks of Waiting Lines, Operations Research 5 (4), 1957, 518–521
[18] Knuth, Donald E.: The Art of Computer Programming, Vol. 2, Seminumerical Algorithms,
2nd ed., Addison Wesley, Reading, MA, 1981
[19] Kleinrock, L.: Queuing Systems, Vol. 1, theory Wiley, New York, 1975
131
10 Anhang: Eine kleine Einführung in die Simulation
OR II c, Master-Modul IV
[20] Kleinrock, L.: Queuing Systems, Vol. 2, applications Wiley, New York, 1976
[21] Krickeberg, K.; Ziezold, H.: Stochastische Methoden, Springer Verlag, Berlin Heidelberg
New York, 1977
[22] Lehmer, D. H.: Mathematical methods in large-scale computing units, in Proc. 2nd Symp.
on Large-Scale Digital Calculating Machinery, Havard University Press, Cambrigde, Mass.,
1951, 141–146,
[23] Little, J. D. C.: A Proof of the Queueing Formula L = λW , Operations Research, 9, 1961,
383–387
[24] Marsaglia, G.: Random numbers fall mainly in the planes, Proceedings of the National
Academy of Sciences of the United States of America, Vol. 60, 1968, 25–28
[25] Neumann, K.; Morlock, M.: Operations Research, Hamburg, München, 1993
[26] Ng,C.H.: Queuing modelling fundamentals, Wiley, New York, 1997
[27] Papoulis, A.; Pillai, S.U.: Probability, random variables and stochastic processes, (4rd
edition), Boston, 2002
[28] Schoo, M., Pawlikowski, K. und McNickle, D. C.: A Survey and Empirical Comparison
of Modern Pseudo-Random Number Generators for Distributed Stochastic Simulations,
Technical Report TR-CSSE, University of Canterbury, Christchurch, New Zealand, 2005
[29] Spiegel, M.R.; Stephens, L.J.: Statisitcs, Schaum’s outlines, 3rd ed., McGraw-Hill, New
York, 1998
[30] Waldmann,K.H.; Stocker, U.M.: Stochastische Modelle - Eine anwendungsorientierte Einführung, Springer, Berlin-heidelberg, 2004
[31] Taha, H.A.: Operations Research, An Introduction, Boston, 2011
[32] Thomopoulos, N.T.: Fundamentals of queuing theory, Springer, New York, 2012
[33] Wolff, R.W.; Poisson arrivals see time averages, Operations Research, 30 (2), 1982, 223–
231
132