Blatt 8: Drallsatz - Institut für Nichtlineare Mechanik
Werbung

Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 8.1
Aufgabe 8.1
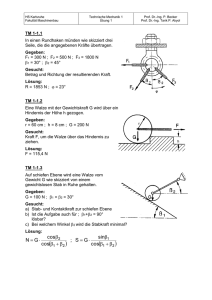
Bei einer Wirbelstrombremse wird das Schwungrad SR (Masse m,
Radius r) durch einen Bremsmagnet B verzögert. Das hierbei wirkende Bremsmoment MB ist proportional zur Winkelgeschwindigkeit
(MB = kω). In der Lagerung wirkt zusätzlich ein konstantes Reibmoment MR .
B
ω
a) Stellen Sie den Drallsatz für die Wirbelstrombremse auf.
b) Bestimmen Sie ω(t) für den Fall, dass ω(t = 0)=ω0 ist.
SR
c) Nach welcher Zeit t∗ kommt das Rad zum Stehen?
Aufgabe 8.2
Eine homogene Walze (Masse m, Radius r) wird zum Zeitpunkt t = 0 mit der translatorischen
Geschwindigkeit v0 auf eine raue waagrechte Ebene (Gleitreibungskoeffizient µ) aufgesetzt. Vor
dem Aufsetzen dreht sich die Walze nicht. In Folge der Gleitreibung fängt die Walze an, sich zu
drehen.
a) Wie lange dauert es, bis ihre Drehgeschwindigkeit so groß geworden ist, dass sie von da an
ohne Gleiten weiterrollt?
b) Welche Strecke hat ihr Schwerpunkt bis dahin zurückgelegt?
Aufgabe 8.3
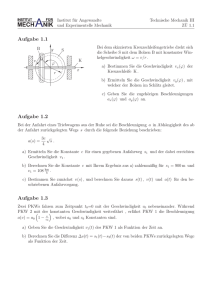
Eine Vollwalze W (Masse m1 , Durchmesser d) rollt auf einer schiefen Ebene ohne Gleiten
nach unten und wird dabei an ihrer Oberseite durch ein homogenes Brett B (Masse m2 ,
Länge L) gebremst, das parallel zur schiefen Ebene verläuft und an seinem oberen Ende gelenkig gelagert ist. Haft- und Gleitreibungskoeffizient zwischen Brett und Walze seien µ0 und µ.
g
L
a) Welche Entfernung x0 muss der Berührpunkt
der Walze vom Lager des Brettes haben, damit aus der Ruhe heraus gerade eine Bewegung beginnen kann?
x0
d
x
B
α
W
b) Welche Neigung α muss mindestens vorhanden sein, wenn das nach a) zu errechnende
x0 < L sein soll?
c) Welche Geschwindigkeit v̄ hat der Schwerpunkt der Walze am unteren Ende des
Bretts, wenn die Walze bei x0 wie in
a) berechnet die Bewegung ohne (merkliche) Anfangsgeschwindigkeit begonnen hat?
Drücken Sie das Ergebnis in µ0 , µ, α, L und
m2
aus.
m1
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 8.2
Lösung zur Aufgabe 8.1
MB
ϕ, ω
MR
S
a) Der Drallsatz für eine ebene Scheibenbewegung bezüglich des Körperschwerpunkts S
lautet allgemein:
X
Θ(S) ω̇ =
MkS
k
In diesem Fall (Θ(S) z.B. aus Formelsammlung):
r
Θ(S) , m
Θ(S) ω̇ = −MB − MR
1
m r2 ω̇ = −k ω − MR
2
dω
1
m r2
= −k ω − MR
2
dt
(1)
b) Ausgehend von Gln. (1) erhält man durch Trennung der Variablen:
m r2
dω
2 (k ω + MR )
Zω
1
m r2
dω̃
2k
ω̃ + MkR
ω
0
2
mr
MR ω
ln ω̃ +
2k
k
ω̃=ω0
2
mr
MR
MR
ln ω +
− ln ω0 +
2k
k
k
!
w + MkR
ln
ω0 + MkR
MR
k
ω0 + MkR
w+
= −dt
= −
Zt
dt̃
0
= −t
= −t
= −
2k
t
m r2
2k
= e− m r2 t
MR
MR − 2 k2 t
e mr
ω(t) = −
+ ω0 +
k
k
(2)
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 8.3
c) Mit der in Gleichung (2) berechneten Winkelgeschwindigkeit ω(t) ergibt sich:
!
ω (t∗ ) = 0
−
MR
MR
+ ω0 +
k
k
2k
∗
= 0
2k
∗
=
e− m r 2 t
MR
ωo k + MR
m r2
ωo k + MR
=
ln
2k
MR
e− m r 2 t
t∗
Lösung zur Aufgabe 8.2
a) In vertikaler Richtung findet keine Bewegung statt. Der Impulssatz in vertikaler Richtung führt daher auf die statische
Gleichgewichtsbedingung. Das Kräftegleichgewicht liefert:
ω
v
S
N = mg
mg
(1)
Der Impulssatz in horizontaler Richtung lautet:
N
R
m
dv
(1)
Gleitreib.
= −R = −µ N = −µ mg
dt
(2)
Die Symmetrieachse des Zylinders behält bei der Bewegung ihre Richtung bei. Für eine
solche ebene Bewegung gilt der Drallsatz bezüglich des Schwerpunktes in der Form:
X
Θ(S) ω̇ =
MkS
(3)
k
Hinweis: Da zunächst zwischen der Walze und der Ebene ein Schlupf auftritt, ist der Auflagepunkt in diesem Fall kein Momentanpol.
Aus Gleichung (3) folgt mit Θ(S) = 21 m r2 , der Gleitreibungsbeziehung und (1):
Θ(S) ω̇ = r R
=⇒
1
dω
m r2
= r µ mg
2
dt
=⇒
1 dω
r
= µg
2 dt
(4)
Gleichungen (2) und (4) gelten, solange das Rad rutscht. Mit den Anfangsbedingungen
v(t = 0) = v0 und ω(t = 0) = 0 folgt:
aus (2) :
Zv
dṽ
1
r
2
Zω
= −µg
ṽ=v0
aus (4) :
Zt
dt̃
⇒
v = v0 − µgt
⇒
ω=2
(5)
t̃=0
ω̃=0
dω̃ = µ g
Zt
t̃=0
dt̃
µg
t
r
(6)
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 8.4
Zum Zeitpunkt t = T , in dem die Bewegung in reines Rollen übergeht, gilt v = ωr (der
Auflagepunkt ist nun Momentanpol) und somit folgt aus (5) und (6):
v0 − µgT =
2µg
Tr
r
=⇒
T =
v0
3µ g
(7)
b) Der zurückgelegte Weg sT ergibt sich aus (5) durch Integration:
ds
= v0 − µgt ;
dt
ZT
ZsT
(v0 − µgt) dt
ds =
⇒
v =
mit s(t = 0) = 0
0
0
1
µg T 2
2
v02
µ g v02
5 v02
=
−
=
3 µ g 18 µ2 g 2
18 µ g
sT = v0 T −
mit (7) sT
Lösung zur Aufgabe 8.3
x0
K
P
L
2
Px
S
Py
α
a) Damit Walze und Brett im statischen Gleichgewicht sind,
muss gelten (MP: Momentalpol):
Brett:
X
!
MkP = 0
k
m2 g
−Kx0 + m2 g cos α ·
K
m1 g
L
=0
2
K = m2 g cos α ·
ω
S
d
R
MP
N
L
2 x0
(1)
Walze:
X
!
MkMP = 0
k
−Sd + m1 g sin α ·
d
=0
2
1
S = m1 g sin α
2
(2)
Im Fall des Haftens gilt |S| ≤ µ0 K und damit für den Grenzfall des Gleichgewichts:
S = µ0 K
(3)
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 8.5
Einsetzen von (1) und (2) in (3) liefert:
L
1
m1 g sin α = µ0 m2 g cos α ·
2
2 x0
m 2 µ0 L
x0 =
m1 tan α
(4)
b) Für x0 < L gilt mit (4):
m 2 µ0 L
< L
m1 tan α
tan α > µ0
m2
m1
m2
α > arctan µ0
m1
c) Im Allgemeinen wird der Impuls- und Drallsatz eines Körpers bezüglich seines Schwerpunktes
aufgestellt. Für die homogene abrollende Walze kann aber auch der Drallsatz bezüglich des
Momentanpols aufgestellt werden.
Der Drallsatz für die Walze bezüglich des Momentanpols MP liefert:
1
Θ(MP) ω̇ = d m1 g sin α − S d
2
2
2
d
1
d
(MP)
+ m1
Massenträgheitsmoment: Θ
= m1
2
2
2
| {z }
(5)
Steineranteil
Θ(MP) =
3
m1 d2
8
(6)
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
(aer, ee) ZÜ 8.6
Außerdem gilt die kinematische Beziehung
d
ẋ = ω
2
2
ω̇ = ẍ
d
⇒
(7)
,
wobei ẋ die Geschwindigkeit des Schwerpunktes ist.
Zwischen Walze und Brett tritt Gleitreibung auf:
S = µK
(8)
Einsetzen von (1) für beliebiges x in (8) liefert die Reibkraft S:
S=µ
L
m2 g cos α
2x
(9)
Einsetzen von (6), (7) und (9) in (5) liefert:
3
2
1
L
m1 d2 ẍ =
d m1 g sin α − µ m2 g cos α · d
8
d
2
2x
m2
1
3
ẍ = sin α − µL
cos α ·
2g
m1
x
·
2
m1 g d
Gleichung (10) ist eine Differentialgleichung, die mit Hilfe der Beziehung ẍ = v
Trennung der Variablen (Separation) und Integration gelöst werden kann:
Zv
2g
ṽ dṽ =
3
0
ZL x0
m2
1
sin α − µL
cos α ·
m1
x
dx
L
1 2 v
m2
2g
sin α · x − µL
ṽ cos α · ln x
=
2
3
m1
ṽ=0
x=x0
v
2
m2
L
4
g sin α · (L − x0 ) − µL
cos α · ln
=
3
m1
x0
Durch Einsetzen von x0 aus (4) erhält man:
4
m2
m2
m2 1
2
v = gL sin α − µ0
cos α + µ
cos α · ln µ0
3
m1
m1
m1 tan α
Damit ist die gesuchte Geschwindigkeit:
s
+
m2
m2
m2
gL
v =(−) 2
cos α + µ
cos α · ln µ0
cot α
sin α − µ0
3
m1
m1
m1
(10)
dv
durch
dx