Analysis 2
Werbung

Analysis 2
für Technische Mathematik
SS 2015
Michael Kaltenbäck
Inhaltsverzeichnis
8
9
Das Riemannsche Integral
8.1 Ober- und Untersummen . . . . . . . . . . .
8.2 Das Riemann-Integral . . . . . . . . . . . . .
8.3 Integrale von stetigen Funktionen . . . . . . .
8.4 Differential und Integralrechnung . . . . . . .
8.5 Weitere Eigenschaften des Integrals . . . . .
8.6 Uneigentliche Integrale . . . . . . . . . . . .
8.7 Vertauschung von Integralen mit Grenzwerten
8.8 Mittelwertsatz . . . . . . . . . . . . . . . . .
8.9 Übungsbeispiele . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
5
11
12
17
19
22
32
33
Normen und Banachräume
9.1 Normierte Räume . . . . . . . . . . . . . . .
9.2 Lineare Abbildungen . . . . . . . . . . . . .
9.3 Banachraumwertige Reihen, Funktionen, etc.
9.4 Übungsbeispiele . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
41
41
45
49
64
.
.
.
.
67
67
77
83
89
.
.
.
.
.
.
.
.
.
.
.
93
93
98
104
106
109
115
118
119
130
132
134
10 Ableitungen nach mehreren Variablen
10.1 Partielle Ableitungen . . . . . . .
10.2 Höhere Ableitungen . . . . . . . .
10.3 Extremwerte . . . . . . . . . . . .
10.4 Übungsbeispiele . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11 Wegintegrale
11.1 Wege . . . . . . . . . . . . . . . . . . .
11.2 Wegintegrale . . . . . . . . . . . . . . .
11.3 Offene Mengen in Rn und Gebiete . . . .
11.4 Gradientenfelder . . . . . . . . . . . . .
11.5 Lokale Gradientenfelder . . . . . . . . .
11.6 Homotopie und einfacher Zusammenhang
11.7 Komplexe Wegintegrale . . . . . . . . . .
11.8 Holomorphe Funktionen . . . . . . . . .
11.9 Nochmals komplexe Differenzierbarkeit*
11.10Harmonische Funktionen* . . . . . . . .
11.11 Übungsbeispiele . . . . . . . . . . . . . .
i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ii
12 Topologische Grundlagen
12.1 Topologische Grundbegriffe . . . . . . . . . . .
12.2 Abgeschlossene Mengen . . . . . . . . . . . . .
12.3 Stetige Abbildungen . . . . . . . . . . . . . . .
12.4 Basis, Subbasis . . . . . . . . . . . . . . . . . .
12.5 Initiale Topologie . . . . . . . . . . . . . . . . .
12.6 Spur- und Produkttopologie . . . . . . . . . . . .
12.7 Finale Topologie* . . . . . . . . . . . . . . . . .
12.8 Zusammenhang und Trennungseigenschaft (T 1)*
12.9 Trennungseigenschaften (T 3) und (T 4) . . . . . .
12.10Das Lemma von Urysohn* . . . . . . . . . . . .
12.11Kompaktheit . . . . . . . . . . . . . . . . . . . .
12.12Filter und Netze* . . . . . . . . . . . . . . . . .
12.13Satz von Tychonoff* . . . . . . . . . . . . . . .
12.14Kompaktheit in metrischen Räumen . . . . . . .
12.15Übungsbeispiele . . . . . . . . . . . . . . . . . .
INHALTSVERZEICHNIS
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
139
139
144
148
152
156
158
162
164
167
169
172
177
182
184
189
13 Lemma von Zorn*
195
Literaturverzeichnis
199
Index
200
INHALTSVERZEICHNIS
iii
Die mit * gekennzeichneten Abschnitte, Resultate bzw. Bemerkungen sind über die
Vorlesung hinausführendes Material, welches aber den Umfang der Vorlesung sprengen würde.
iv
INHALTSVERZEICHNIS
Kapitel 8
Das Riemannsche Integral
8.1 Ober- und Untersummen
Schon die Mathematik der Antike beschäftigte man sich mit der Problemstellung, die
Fläche gewisser Figuren zu berechnen. Bei Polygonen ist dies durch Zerlegung in Dreiecke unmittelbar möglich, bei krummlinigen Figuren ist dagegen nicht einmal so klar,
wie Fläche überhaupt zu definieren ist.
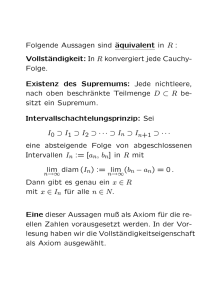
8.1.1 Beispiel. Betrachte die Parabel gegeben durch f (x) = x2 .
Wir sind an der Fläche, die von der x-Achse, der Parabel und der Geraden x = 1
begrenzt wird, interessiert. Dazu könnte man, unserer intuitiven Vorstellung von Fläche
folgend, so vorgehen, dass man die Fläche in Streifen der Breite △x zerlegt, z.B.
△x = 1n , und die Fläche eines Streifens durch das Rechteck mit der Breite △x und
der Höhe min f (x) approximiert, wobei das Minimum über die im betrachteten Streifen liegenden x-Koordinaten genommen wird. Ist △x sehr klein, so wird man hoffen,
dass die Summe der Flächen aller dieser Rechtecke fast gleich der zu bestimmenden
Fläche ist.
f (x) = x2
1
f (x) = x2
1
n=8
n=4
0
1
0
1
Abbildung 8.1: Approximation der Fläche von unten
In unserem Fall erhält man auf dieser Art und Weise die folgende Näherung für die
Gesamtfläche A:
An =
n
X
k=1
min{ f (x) : (k − 1)
1
1
1 1
≤ x≤k }· =
n
n n
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
2
=
!2
n
n−1
X
k−1
1
1 X 2
1 (n − 1)n(2n − 1)
· = 3
.
k = 3
n
n
6
n
n
k=1
k=0
Lässt man in dieser Formel n immer größer werden, so erhält man A = limn→∞ An = 31 .
Genauso könnte man natürlich die Fläche des Streifens durch das Rechteck mit
der Breite △x und der Höhe max f (x) approximieren. Unserer Vorstellung von Fläche
folgend sollte bei dieser zweiten Methode zur Flächenbestimmung das selbe herauskommen.
f (x) = x2
1
f (x) = x2
1
n=8
n=4
0
1
0
1
Abbildung 8.2: Approximation der Fläche von oben
In der Tat gilt
Ân =
n
X
k=1
1 1 X k2 1
1
≤ x≤k }· =
=
n
n n k=1 n2 n
n
max{ f (x) : (k − 1)
=
n
1 n(n + 1)(2n + 1)
1 X 2
,
k = 3
6
n3 k=1
n
und für n → ∞ erhält man wieder A = limn→∞ Ân = 31 .
Wir wollen den Zugang aus dem letzten Beispiel formalisieren.
8.1.2 Definition. Sei [a, b] ein endliches Intervall in R mit a < b. Wir nennen eine
endliche Teilmenge Z von [a, b] eine Zerlegung des Intervalls [a, b], falls a, b ∈ Z.
Wir bezeichnen mit Z die Menge aller solcher Zerlegungen, versehen diese Menge
mit der Relation ⊆, und erhalten damit eine gerichtete Menge; vgl. Definition 5.3.1.
Wollen wir die Elemente einer Zerlegung Z aufzählen, so werden wir das immer
so tun, dass n(Z) + 1 die Mächtigkeit von Z bezeichnet, und dass
Z = {ξ j : j = 0, . . . , n(Z)}, wobei
a = ξ0 < ξ1 < · · · < ξn(Z) = b .
Sei nun f : [a, b] → R eine beschränkte Funktion. Zu einer gegebenen Zerlegung
Z = {ξ j : j = 0, . . . , n(Z)} ∈ Z bezeichnen wir mit U(Z) die zu Z gehörige Untersumme von f , also die Summe der Flächen der Rechtecke unter der Funktion f , die zur
gegebenen Zerlegung gehört:
U(Z) =
n(Z)
X
j=1
(ξ j − ξ j−1 )
inf
t∈[ξ j−1 ,ξ j ]
f (t) .
(8.1)
8.1. OBER- UND UNTERSUMMEN
3
Entsprechend definieren wir die Obersumme
O(Z) =
n(Z)
X
j=1
(ξ j − ξ j−1 ) sup
f (t) .
(8.2)
t∈[ξ j−1 ,ξ j ]
f (x)
Z:
a = ξ0 ξ1
ξ2
ξ3
ξ4
ξ5
ξ6
ξ7
ξ8
ξ9 = b
f (x)
Z:
a = ξ0 ξ1
ξ2
ξ3
ξ4
ξ5
ξ6
ξ7
ξ8
ξ9 = b
Abbildung 8.3: Veranschaulichung einer Unter- bzw. Obersumme
Da wir f als beschränkt voraussetzen, existieren diese Ober- und Untersummen.
P
Klarerweise gilt wegen b − a = n(Z)
j=1 (ξ j − ξ j−1 )
(b − a) inf f (t) ≤ U(Z) ≤ O(Z) ≤ (b − a) sup f (t) .
t∈[a,b]
t∈[a,b]
Wir sehen also, dass alle Ober- und Untersummen gleichmäßig nach oben und nach
unten beschränkt sind. Somit ist folgende Definition sinnvoll.
8.1.3 Definition. Wir setzen
b
Z−
f dx := inf Z∈Z O(Z),
a
Zb
−
a
f dx := supZ∈Z U(Z) ,
und bezeichnen die erste Zahl als das obere- und die zweite als das untere Integral von
f über [a, b].
Die Funktion f heißt integrierbar auf [a, b], falls das obere mit dem unteren Integral
übereinstimmt. In diesem Fall bezeichnen ihren gemeinsamen Wert als das Integral1
1 Man
spricht auch vom Darbouxschen Integral.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
4
von f über [a, b]:
b
b
Z−
f dx =
−
a
Z−
f dx =
Zb
f dx .
−
a
a
8.1.4 Bemerkung. Da die Menge Z aller Zerlegungen von [a, b] bezüglich ⊆ eine ge
richtete Menge ist, können wir von den Netzen U(Z) Z∈Z und O(Z) Z∈Z sprechen.
Sei nun Z1 ⊆ Z2 , wobei Z1 = {ξ j : j = 0, . . . , n(Z1 )} sowie
Z2 = {ηk : k = 0, . . . , n(Z2 )}. Ist j ∈ {1, . . . , n(Z1 )}, so gibt es Indizes k( j − 1) < k( j),
sodass
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 < ηk( j) = ξ j .
|
{z
}
k( j)−k( j−1)−1 viele
Wegen (ξ j − ξ j−1 ) =
Pk( j)
k=k( j−1)+1 (ηk
(ξ j − ξ j−1 )
inf
t∈[ξ j−1 ,ξ j ]
− ηk−1 ) folgt
f (t) =
k( j)
X
(ηk − ηk−1 )
k=k( j−1)+1
inf
t∈[ξ j−1 , ξ j ]
| {z }
f (t) ≤
⊇[ηk−1 ,ηk ]
k( j)
X
(ηk − ηk−1 )
k=k( j−1)+1
inf
t∈[ηk−1 ,ηk ]
f (t) .
Summiert man über alle j ∈ {1, . . . , n(Z1 )} auf, so erhält man U(Z1 ) ≤ U(Z2 ). Wir
sehen also, dass U(Z) Z∈Z ein monoton wachsendes Netz ist. Nach (5.10) gilt daher
lim U(Z) = sup U(Z) =
Z∈Z
Entsprechend ist das Netz O(Z)
Z∈Z
Z∈Z
f dx .
−
a
der Obersummen monoton fallend, und
b
lim O(Z) = inf O(Z) =
Z∈Z
Zb
Z∈Z
Z−
f dx .
a
Klarerweise ist damit auch das Netz O(Z) − U(Z) Z∈Z monoton fallend, und besteht
aus nicht negativen reellen Zahlen. Also gilt auch (vgl. Nach (5.10))
inf (O(Z) − U(Z)) = lim (O(Z) − U(Z)) ,
Z∈Z
Z∈Z
(8.3)
und wegen der Rechenregeln für R-wertige Netze (siehe Anschnitt 5.3) gleicht dieser
Ausdruck
b
Z−
Zb
f dx .
(8.4)
f dx −
lim O(Z) − lim U(Z) =
Z∈Z
Z∈Z
a
−
a
Also ist die Integrierbarkeit einer Funktion f äquivalent dazu, dass der Ausdruck in
(8.3) verschwindet.
8.2. DAS RIEMANN-INTEGRAL
5
8.2 Das Riemann-Integral
Der oben vorgestellte Zugang zur Definition eines Integrals ist zwar befriedigend um
dem Begriff Fläche unter einer Kurve einen Sinn zu geben, um aber etwa komplexoder vektorwertige Funktionen integrieren zu können, benötigen wir einen alternativen
Ansatz.
n(R) 8.2.1 Definition. Wir nennen das Paar R = (ξ j )n(R)
j=0 ; (α j ) j=1 eine Riemann-Zerlegung
n(R)+1
eines reellen Intervalls [a, b] mit a < b, falls n(R) ∈ N und (ξ j )n(R)
, (α j )n(R)
j=0 ∈ R
j=1 ∈
n(R)
R , wobei
a = ξ0 < ξ1 < · · · < ξn(R) = b; α j ∈ [ξ j−1 , ξ j ], j = 1, . . . , n(R) ,
und nennen
|R| := max{(ξ j − ξ j−1 ) : j = 1, . . . , n(R)}
die Feinheit der Riemann-Zerlegung. Die Punkte ξ j heißen Stützstellen und die Punkte
α j Zwischenstellen. Weiters sei
R1 R2 :⇔ |R2 | ≤ |R1 | .
Ist R die Menge aller solcher Riemann-Zerlegungen, dann ist (R, ) eine gerichtete
Menge2 .
Ist f : [a, b] → R (C) eine beschränkte Funktion, so betrachtet man das Netz
S (R) R∈R , wobei die Riemannsumme zur Riemann-Zerlegung R durch
S (R) =
n(R)
X
j=1
(ξ j − ξ j−1 ) f (α j ) .
definiert ist. Konvergiert dieses Netz, so nennen wir die Funktion f Riemannintegrierbar und bezeichnen
Zb
f dx := lim S (R)
a
R∈R
als das Riemann Integral von f über [a, b].
Für limR∈R S (R) schreibt man auch lim|R|→0 S (R), um deutlich zu machen, dass R
durch die Feinheit der Riemann-Zerlegung gerichtet wird. Da es zu jedem δ > 0, δ ≤
b −a eine Riemann-Zerlegung R gibt mit |R| = δ, ist die Existenz von I = lim|R|→0 S (R)
äquivalent zu
∀ǫ > 0 ∃δ > 0 : |S (R) − I| < ǫ ∀R ∈ R, |R| ≤ δ .
8.2.2 Bemerkung. Ist f
: [a, b] → C, so folgt aus Re S ( f, R) =
S (Re f, R), Im S ( f, R) = S (Im f, R) und der Tatsache, dass ein komplexwertiges
Netz genau dann konvergiert, wenn Real- und Imaginärteil es tun, dass die RiemannIntegrierbarkeit von f zu der von Re f und Im f äquivalent ist.
2 ist sicher nicht antisymmetrisch und unterscheidet sich wesentlich von der Halbordnung ⊆ auf Z aus
Definition 8.1.2.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
6
f (x)
R:
a = ξ0
ξ1
α1
ξ2
ξ3
α2
ξ4
α3
α4
ξ5
α5
ξ6
α6
ξ7
α7
ξ8
α8
ξ9
=b
α9
Abbildung 8.4: Veranschaulichung einer Riemannsumme
8.2.3 Bemerkung. Für ein reell- oder komplexwertiges und beschränktes f definiert
auf [a, b] sei M eine feste, endliche Teilmenge von [a, b] mit m Elementen. Setzt man
für eine Riemann-Zerlegung R
n(R)
X
S M (R) =
(ξ j − ξ j−1 ) f (α j ) ,
j=1
M∩[ξ j−1 ,ξ j ]=∅
so hat diese Summe höchstens 2m Summanden weniger als S (R), da jedes Element aus
M in höchstens zwei verschiedenen Intervallen [ξ j−1 , ξ j ] liegen kann. Somit folgt
S M (R) − S (R) ≤
n(R)
X
(ξ j − ξ j−1 )| f (α j )| ≤ |R| · 2m · k f k∞ ,
wobei k f k∞ = sup{| f (t)| : t ∈ [a, b]}, und wir sehen, dass S M (R)
konvergiert, wenn S (R) R∈R es tut. In diesem Fall gilt
Z b
f dx = lim S (R) = lim S M (R) .
a
(8.5)
j=1
M∩[ξ j−1 ,ξ j ],∅
|R|→0
R∈R
genau dann
|R|→0
Als Anwendung dieser Bemerkung sieht man, dass, wenn sich zwei Funktionen f und g
nur auf einer endlichen Menge M unterscheiden, aus der Riemann-Integrierbarkeit von
f auch die von g folgt. In der Tat ist dann S M ( f, R) = S M (g, R), wobei das Argument
f bzw. g andeutet, von welcher Funktion die entsprechende Riemann-Summe gebildet
wird.
Mit Hilfe dieser Bemerkung können wir einen ersten Zusammenhang zwischen
Riemann-Summen und Ober- bzw. Untersummen herstellen.
8.2.4 Lemma. Sei f : [a, b] → R eine beschränkte reellwertige Funktion, und sei
Z0 ∈ Z, ǫ > 0. Dann gibt es ein δ > 0, sodass
∀R ∈ R, |R| ≤ δ ⇒ U(Z0 ) − ǫ ≤ S (R) ≤ O(Z0 ) + ǫ .
Beweis. Wir zeigen zunächst für ein beschränktes f : [a, b] → R mit f (x) ≥ 0, x ∈
[a, b], dass es ein δ > 0 gibt mit
∀R ∈ R, |R| ≤ δ ⇒ S (R) ≤ O(Z0 ) + ǫ .
(8.6)
8.2. DAS RIEMANN-INTEGRAL
7
Man schreibe Z0 = {ηk : k = 0, . . . , n(Z0 )} ∈ Z, und setze M = Z0 . Mit (8.5) erhalten
wir
S M (R) − S (R) ≤ |R| · 2(n(Z0) + 1) · k f k∞ .
n(R) Für R = (ξ j )n(R)
j=0 ; (α j ) j=1 ∈ R, bedeutet M ∩ [ξ j−1 , ξ j ] = ∅, dass [ξ j−1 , ξ j ] sicher ganz
in einem gewissen Intervall [ηk( j)−1 , ηk( j) ] enthalten ist. Mit J := { j ∈ {1, . . . , n(R)} :
M ∩ [ξ j−1 , ξ j ] = ∅} folgt3
S M (R) =
X
j∈J
n(Z
X0 )
X
k=1 j∈J,k( j)=k
Es folgt
|
(ξ j − ξ j−1 ) f (α j ) =
(ξ j − ξ j−1 ) sup
{z
≤ηk −ηk−1
}
t∈[ηk−1 ,ηk ]
f (t) ≤
n(Z
X0 )
X
k=1 j∈J,k( j)=k
(ξ j − ξ j−1 ) f (α j ) ≤
n(Z
X0 )
k=1
(ηk − ηk−1 ) sup
f (t) = O(Z0 ) .
t∈[ηk−1 ,ηk ]
S (R) ≤ S M (R) − S (R) + O(Z0 ) ≤ O(Z0 ) + |R| · 2(n(Z0 ) + 1) · k f k∞ .
Die zu beweisende Ungleichung (8.6) gilt nun für |R| ≤ δ :=
ǫ
2(n(Z0 )+1)·k f k∞ .
Erfüllt nun ein beschränktes f : [a, b] → R nicht notwendigerweise f (x) ≥ 0,
so betrachte f + c für ein hinreichend großes c ∈ R – etwa c = k f k∞ – auf dass
f (x) + c ≥ 0, x ∈ [a, b]. Insbesondere gilt (8.6) für f + c. Wegen
O( f + c, Z0 ) = O( f, Z0 ) + c(b − a) und S ( f + c, R) = S ( f, R) + c(b − a)
gilt (8.6) auch für f für ein bestimmtes δ > 0. Indem wir das Gezeigte auf − f anwenden
und beachten, dass
O(− f, Z0 ) = −U( f, Z0 ) und S (− f, R) = −S ( f, R) ,
erhalten wir U( f, Z0 ) − ǫ ≤ S ( f, R) ≤ O( f, Z0 ) + ǫ für |R| ≤ δ mit einem hinreichend
kleinen δ > 0.
❑
Wir werden nun zeigen, dass die beiden vorgestellten Zugänge zur Integration für
reellwertige beschränkte Funktionen f äquivalent sind.
8.2.5 Satz. Für eine beschränkte Funktion f : [a, b] → R sind folgende Aussagen
äquivalent:
(i) Das obere und das untere Integral von f stimmen überein.
(ii) inf Z∈Z (O(Z) − U(Z)) = 0.
(iii) f ist Riemann-integrierbar, d.h. lim|R|→0 S (R) existiert.
n(R) 4
(iv) Setzt man für eine beliebige Riemann-Zerlegung R = (ξ j )n(R)
j=0 ; (α j ) j=1 ∈ R
O(R) :=
n(R)
X
j=1
(ξ j − ξ j−1 ) sup
t∈[ξ j−1 ,ξ j ]
f (t), U(R) :=
n(R)
X
j=1
(ξ j − ξ j−1 )
inf
t∈[ξ j−1 ,ξ j ]
so gilt lim|R|→0 (O(R) − U(R)) = 0.
3 Die
Voraussetzung f ≥ 0 geht in der letzen Ungleichung ein.
gilt O(R) = O(Z) und U(R) = U(Z), wobei Z = {ξ j : j = 0, . . . , n(R)} ∈ Z.
4 Klarerweise
f (t) ,
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
8
(v) Es gibt eine Folge (Rn )n∈N von Riemann-Zerlegungen, sodass
limn→∞ (O(Rn ) − U(Rn )) = 0.
In einem dieser Fälle gilt
b
Z−
f dx =
Z
b
f dx = lim O(R) = lim U(R) =
|R|→0
a
−
a
|R|→0
lim S (Rn ) = lim O(Rn ) = lim U(Rn ) ,
n→∞
n→∞
n→∞
für jede beliebige Folge (Rn )n∈N von Riemann-Zerlegungen mit limn→∞ |Rn | = 0.
Beweis.
(iii) ⇒ (iv) : Setzen wir R := lim|R|→0 S (R), so wollen zeigen, dass R = lim|R|→0 O(R).
Zu jedem ǫ > 0 gibt es wegen der vorausgesetzten Konvergenz ein R0 , sodass
|R − S (R)| < ǫ für alle R R0 .
n(R) Sei R = (ξ j )n(R)
j=0 ; (α j ) j=1 R0 eine feste Riemann-Zerlegung. Wähle nun für
j = 1, . . . , n(R) und k ∈ N ein αkj ∈ [ξ j−1 , ξ j ], sodass
sup
t∈[ξ j−1 ,ξ j ]
f (t) −
1
< f (αkj ) ≤ sup f (t) .
k
t∈[ξ j−1 ,ξ j ]
k n(R) Setzt man Rk = (ξ j )n(R)
j=0 ; (α j ) j=1 , so folgt
n(R)
X
1
1
O(R) − S (Rk ) ≤
|ξ j − ξ j−1 | = (b − a) .
k
k
j=1
Aus |Rk | = |R| ≤ |R0 | folgt Rk R0 , und somit
|R − O(R)| ≤ |R − S (Rk )| + |S (Rk ) − O(R)| < ǫ +
b−a
.
k
Für k → ∞ folgt |R − O(R)| ≤ ǫ und zwar für alle R R0 . Also gilt
lim|R|→0 O(R) = R. Genauso sieht man, dass lim|R|→0 U(R) = R.
Aus den Rechenregeln für Grenzwerte folgt damit
0 = R − R = lim|R|→0 (O(R) − U(R)).
(iv) ⇒ (v) : Ist (Rn )n∈N eine Folge von Riemann-Zerlegungen mit limn→∞ |Rn | = 0, so
besagt dieses Grenzverhalten für die Feinheit gerade, dass O(Rn ) − U(Rn ) n∈N
eine Teilfolge des Netzes O(R) − U(R) R∈R im Sinne von Definition 5.3.6 ist.
Gemäß Lemma 5.3.7 folgt
lim (O(Rn ) − U(Rn )) = lim (O(R) − U(R)) = 0 .
n→∞
|R|→0
Schließlich sei noch bemerkt, dass es offensichtlich eine Folge von RiemannZerlegungen mit limn→∞ |Rn | = 0 gibt. Man nehme etwa die Folge (Rn )n∈N , wo
Rn genau n +1 viele äquidistante Stützstellen hat, und wobei die Zwischenstellen
genau in der Mitte zwischen den angrenzenden Stützstellen liegt.
8.2. DAS RIEMANN-INTEGRAL
9
(v) ⇒ (ii) : Das ist klar, wenn man beachtet, dass O(R) = O(Z), U(R) = U(Z), wenn
Z = {ξ j : j = 0, . . . , n(R)} ∈ Z die Menge der Stützstellen einer gegebenen
n(R) Riemann-Zerlegung R = (ξ j )n(R)
j=0 ; (α j ) j=1 ∈ R ist.
(i) ⇔ (ii) : Das haben wir schon in Bemerkung 8.1.4 gesehen (vgl. (8.3) und (8.4)).
b
(i) ⇒ (iii) : Nun gelte also I :=
R−
f dx =
a
Rb
−
a
f dx. Zu einem beliebigen ǫ > 0 wähle Z0
so, dass
I − ǫ < U(Z0 ) ≤ O(Z0 ) < I + ǫ .
Nach Lemma 8.2.4 folgt die Existenz eines δ > 0, sodass
I − 2ǫ < U(Z0 ) − ǫ ≤ S (R) ≤ O(Z0 ) + ǫ < I + 2ǫ
für |R| ≤ δ. Also lim|Z|→0 S (R) = I.
Dass limn→∞ O(Rn ) = lim|R|→0 O(R), limn→∞ U(Rn ) = lim|R|→0 U(R) und
limn→∞ S (Rn ) = lim|R|→0 S (R) für limn→∞ |Rn | = 0 gilt, sieht man genauso, wie im
zweiten Beweisschritt.
❑
8.2.6 Beispiel. Die Folgen An und Ân aus Beispiel 8.1.1 sind nicht anderes als U(Rn )
bzw. O(Rn ), wobei Rn = (( nj )nj=0 , ( nj )nj=1 )5 . Wegen Ân − An = O(Rn ) − U(Rn ) → 0 für
n → ∞ folgt aus Satz 8.2.5 die Riemann-Integrierbarkeit von f (x) = x2 auf [0, 1].
Wir können uns mit Satz 8.2.5 auch sicher sein, dass die Folgen An und Ân
tatsächlich gegen das Integral von f über [0, 1] konvergieren.
Wir werden später sehen, dass alle stetigen Funktionen integrierbar sind, und wie
man mit Hilfe der Differentialrechnung das Integral konkret ausrechnet. Dass bei weitem nicht alle Funktionen integrierbar sind, sieht man am übernächsten Beispiel.
8.2.7 Beispiel. Betrachte die konstante Funktion f : [0, 1] → C, d.h. f (t) = c, t ∈
[a, b]. Ist R eine Riemann-Zerlegung, so rechnet man
S (R) =
n(R)
X
j=1
(ξ j − ξ j−1 ) f (α j ) = c
n(R)
X
j=1
(ξ j − ξ j−1 ) = c(b − a) ,
Rb
und damit a c dx = lim|R|→0 S (R) = c(b − a).
Wegen Bemerkung 8.2.3 sehen wir auch, dass jede Funktion, die konstant gleich c
bis auf eine endliche Menge M ist, integrierbar ist und dass das Integral gleich c(b − a)
ist.
Diese Tatsache lässt sich aber nicht auf den Fall eines abzählbaren M ausdehnen.
8.2.8 Beispiel. Betrachte die Funktion f : [0, 1] → R definiert durch
0, x irrational
f (x) :=
.
1, x rational
5 Die
Zwischenstellen sind hier nicht von Bedeutung.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
10
Ist nun Z = {ξ j : j = 0, . . . , n(Z)} eine Zerlegung von [0, 1], so enthält jedes Intervall
[ξ j−1 , ξ j ] sowohl rationale als auch irrationale Zahlen. Somit folgt
U(Z) = 0, O(Z) = 1 .
Also ist f nicht integrierbar.
Im Folgenden wollen wir einige Eigenschaften von Integralen auflisten, die unmittelbar aus der Tatsache folgen, dass wir Integrale als Grenzwerte von Netzen auffassen.
8.2.9 Lemma.
(i) Seien f1 , f2 : [a, b] → R (C) Riemann-integrierbar über [a, b] und sei c ∈ R (C).
Dann sind auch f1 + f2 und c f1 Riemann-integrierbar, und es gilt
Zb
( f1 + f2 ) dx =
a
Zb
f1 dx +
a
Zb
f2 dx,
a
Zb
(c f1 ) dx = c
a
Zb
f1 dx .
a
(ii) Ist f Riemann-integrierbar über [a, b], so gilt
b
−
Z
Z
f dx ≤
| f (x)| dx ≤ (b − a) · k f k∞ ,
b
a
(8.7)
a
wobei sogar |S ( f, R)| ≤ (b − a) · k f k∞ für jede Riemann-Zerlegung R von [a, b].
(iii) Sind g1 , g2 reellwertige Riemann-integrierbare Funktionen über [a, b] mit g1 (x) ≤
g2 (x) für alle x ∈ [a, b], so gilt
Zb
a
g1 dx ≤
Zb
g2 dx .
a
Beweis. Zunächst folgt unmittelbar aus der Definition der Riemannsummen
S ( f1 + f2 , R) = S ( f1 , R) + S ( f2 , R), S (c f1 , R) = cS ( f1 , R), S (g1 , R) ≤ S (g2 , R) .
Durch den Grenzübergang |R| → 0 erhalten wir (i) und (iii).
Nun sei ǫ > 0 und Z0 eine Zerlegung von [a, b]. Weiters sei δ > 0, sodass |R| ≤
δ ⇒ S (| f |, R) ≤ O(| f |, Z0 ) + ǫ; vgl. Lemma 8.2.4.
Ist R eine Riemann-Zerlegung von [a, b] mit |R| ≤ δ, so folgt leicht aus der Definition der Riemannsummen und der Obersummen und der Dreiecksungleichung
|S ( f, R)| ≤ |S (| f |, R)| ≤ O(| f |, Z0 ) + ǫ ≤ k f k∞ (b − a) + ǫ .
(8.7) folgt durch die Grenzwertbildung, zuerst |R| → 0 und dann Z0 ∈ Z, sowie der
Tatsache, dass ǫ > 0 beliebig ist.
Schließlich folgt |S ( f, R)| ≤ (b − a) · k f k∞ für jede Riemann-Zerlegung R von [a, b]
unmittelbar aus der Dreiecksungleichung.
❑
8.3. INTEGRALE VON STETIGEN FUNKTIONEN
11
8.3 Integrale von stetigen Funktionen
Ehe wir uns konkret dem Problem der Integrierbarkeit einer stetigen Funktion widmen,
sei in Erinnerung gerufen, dass gemäß Definition 5.3.10 ein Netz (xi )i∈I mit Werten
in einem metrischen Raum hX, di über eine gerichtete Menge (I, ) als Cauchy-Netz
bezeichnet wird, falls (5.13), also
∀ǫ > 0 ∃i0 ∈ I : d(xi , x j ) < ǫ ∀i, j i0
gilt. Aus Lemma 5.3.11 wissen wir, dass ein Netz in einem vollständigen metrischen
Raum genau dann konvergiert, wenn es ein Cauchy-Netz ist.
Für den folgenden Satz 8.3.4 benötigen wir den Begriff der Oszillation einer Funktion f : D → Y, wobei hY, dY i ein metrischer Raum und D ⊆ X mit einem weiteren
metrischen Raum hX, dX i ist.
8.3.1 Definition. Die Oszillation ist die Abbildung ρ : (0, +∞) → [0, +∞] definiert
durch
(8.8)
ρ(γ) := sup{dY f (s), f (t) : s, t ∈ D, dX (s, t) ≤ γ}, γ ∈ (0, +∞) .
Offenbar hängt ρ(γ) monoton wachsend von γ ab.
8.3.2 Bemerkung. Gemäß (6.2) ist f : D → Y genau dann gleichmäßig stetig, wenn
∀ǫ > 0 ∃δ > 0 : ∀s, t ∈ D, dX (s, t) ≤ δ ⇒ dY ( f (s), f (t)) ≤ ǫ .
Da ein Supremum die kleinste obere Schranke einer Teilmenge von R ist, ist wegen
(8.8) das äquivalent zu
∀ǫ > 0 ∃δ > 0 : ρ(δ) ≤ ǫ .
Wegen der Monotonie von ρ ist das wiederum dasselbe wie
∀ǫ > 0 ∃δ > 0 : 0 ≤ ρ(t) ≤ ǫ ∀t ∈ (0, δ] .
Insbesondere ist die gleichmäßige Stetigkeit von f äquivalent zu limγ→0+ ρ(γ) = 06 .
8.3.3 Lemma. Für eine beschränkte Abbildung f : [a, b] → R (C) und zwei RiemannZerlegungen R1 und R2 von [a, b] gilt
S (R1 ) − S (R2 ) ≤ 2(b − a) · ρ(max(|R1 |, |R2 |)) .
(8.9)
Beweis. Um das einzusehen, sei R eine Riemann-Zerlegung, deren Stützstellen die von
R1 und R2 umfasst. Das bedeutet, dass mit
n(R1 ) n(R2 )
n(R2 ) 1)
R1 = (ξ j )n(R
j=0 ; (α j ) j=1 , R2 = (ζ j ) j=0 ; (γ j ) j=1 ,
die Beziehung
n(R) R = (η j )n(R)
j=0 ; (β j ) j=1 ,
{ξ j : j = 0, . . . , n(R1 )} ∪ {ζ j : j = 0, . . . , n(R2 )} ⊆ {η j : j = 0, . . . , n(R)}
6 Erfüllt die Funktion f : D → Y sogar ρ(γ) ≤ Mγ für alle γ > 0 und ein festes M ≥ 0, so nennet man f
Lipschitz stetig. Man sieht leicht ein, dass das äquivalent zu dY ( f (s), f (t)) ≤ MdX (s, t) für alle s, t ∈ D ist.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
12
gilt. Ist j ∈ {1, . . . , n(R1 )}, so gibt es Indizes k( j − 1) < k( j), sodass
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 < ηk( j) = ξ j .
|
{z
}
k( j)−k( j−1)−1 viele
Wir erhalten wegen (ξ j − ξ j−1 ) f (α j ) =
Pk( j)
k=k( j−1)+1 (ηk
− ηk−1 ) f (α j )
k( j)
X1 )
X
n(R
(ξ j − ξ j−1 ) f (α j ) −
S (R1 ) − S (R) = (ηk − ηk−1 ) f (βk ) =
j=1
k=k( j−1)+1
n(R
X1 )
k( j)
X
j=1 k=k( j−1)+1
n(R
X1 )
k( j)
X
(ηk − ηk−1 ) f (α j ) − f (βk ) ≤
(ηk − ηk−1 ) · | f (α j ) − f (βk )| .
j=1 k=k( j−1)+1
Bemerkt man, dass |α j − βk | ≤ (ξ j − ξ j−1 ) ≤ |R1 |, k ∈ {k( j − 1) + 1, . . . , k( j)}, so folgt
|S (R1 ) − S (R)| ≤
n(R
X2 )
k=1
(ηk − ηk−1 ) · ρ(|R1 |) = (b − a) · ρ(|R1 |) .
Genauso zeigt man |S (R2 ) − S (R)| ≤ (b − a) · ρ(|R2 |). Aus der Dreiecksungleichung
und der Monotonie von ρ folgt dann (8.9).
❑
8.3.4 Satz. Ist f : [a, b] → R (C) stetig auf dem reellen Intervall [a, b], so ist f
Riemann-integrierbar.
Beweis. Wir bemerken zuerst, dass wegen Proposition 6.1.13 die Funktion f beschränkt und wegen Satz 6.3.3 sogar gleichmäßig stetig ist.
Gemäß Lemma 5.3.11 folgt die Konvergenz von S (R) R∈R , wenn wir zeigen
können, dass S (R) R∈R ein Cauchy-Netz ist.
ǫ
; vgl. Bemerkung 8.3.2. Sind
Dazu sei ǫ > 0, und sei δ > 0 so, dass ρ(δ) ≤ 3(b−a)
nun R1 und R2 Riemann-Zerlegungen von [a, b] mit |R1 |, |R2 | < δ, so folgt aus (8.9)
sofort
|S (R1 ) − S (R2 )| ≤ 2(b − a) · ρ(max(|R1 |, |R2 |)) < ǫ
und damit die Tatsache, dass S (R) R∈R ein Cauchy-Netz ist.
❑
8.4 Differential und Integralrechnung
Um das Integral einer Funktion tatsächlich ausrechnen zu können, wollen wir einen
wichtigen Zusammenhang zur Differentialrechnung herstellen. Bevor wir das tun, brauchen wir folgendes Lemma.
8.4. DIFFERENTIAL UND INTEGRALRECHNUNG
13
8.4.1 Lemma. Sei f : [a, b] → R (C) ein Funktion auf dem reellen Intervall [a, b],
und sei c < d, [c, d] ⊆ [a, b]. Weiters bezeichne 1[c,d] die Indikatorfunktion (auch
charakteristische Funktion genannt), d.h.
(
1 , falls t ∈ [c, d]
1[c,d] (t) =
.
0 , falls t < [c, d]
Dann ist f |[c,d] auf [c, d] genau dann Riemann-integrierbar, wenn es 1[c,d] · f auf [a, b]
ist, wobei
Z
Z
d
b
a
1[c,d] · f dx =
c
f |[c,d] dx .
Das ist sicher der Fall, wenn f auf ganz [a, b] Riemann-integrierbar ist.
Beweis. Wir bezeichnen mit R ∈ R die Riemann-Zerlegungen von [a, b] und mit R′ ∈
R′ die Riemann-Zerlegungen von [c, d].
Sei zunächst f über [a, b] Riemann-integrierbar. Wir zeigen, dass dann
S ( f |[c,d] , R′ ) R′ ∈R′ ein Cauchy-Netz ist. Dazu sei ǫ > 0. Da S ( f, R) R∈R konvergent
und daher ein Cauchy-Netz ist, gibt es ein δ > 0, sodass |S ( f, R1 ) − S ( f, R2 )| < ǫ, wenn
nur |R1 |, |R2 | ≤ δ.
Sind nun R′1 , R′2 ∈ R′ mit |R′1 |, |R′2 | ≤ δ, so wähle eine beliebige Fortsetzung R1
und R2 von R′1 bzw. R′2 zu Riemann-Zerlegungen von [a, b] mit einer Feinheit kleiner
oder gleich δ und so, dass die Stütz- und Zwischenstellen von R1 und R2 außerhalb von
[c, d] übereinstimmen.
Die Summanden (ξ j −ξ j−1 ) f (α j ) zu Intervallen [ξ j−1 , ξ j ] mit [ξ j−1 , ξ j ] * [c, d] treten
dann bei S ( f, R1 ) und bei S ( f, R2 ) auf. Also folgt
S ( f, R ) − S ( f, R ) = S ( f | , R′ ) − S ( f | , R′ ) < ǫ .
1
2
′
Somit ist S ( f |[c,d] , R )
Riemann-integrierbar.
R′ ∈R′
[c,d]
1
[c,d]
2
auch ein Cauchy-Netz und f |[c,d] daher auf [c, d]
Wegen (1[c,d] · f )|[c,d] = f |[c,d] folgt aus dem eben bewiesenen auch aus der
Riemann-Integrierbarkeit von 1[c,d] · f die von f |[c,d] .
Wir setzen M = {c, d}, und wissen aus Bemerkung 8.2.3, dass der Beweis vollendet
ist, wenn wir
I = lim
S M ( f |[c,d] , R′ ) ⇒ I = lim S M (1[c,d] · f, R) ,
′
|R |→0
|R|→0
beweisen können. Dazu sei ǫ > 0 gegeben, und δ > 0, sodass aus |R′ | ≤ δ die Ungleichung |I − S M ( f |[c,d] , R′ )| < ǫ folgt.
n(R) Ist nun R = (ξ j )n(R)
j=0 ; (α j ) j=1 eine Riemann-Zerlegung von [a, b] mit |R| ≤ δ, so
′
′ )
′ n(R )
sei R′ = (ξ′j )n(R
die Riemann-Zerlegung von [c, d], für die
j=0 ; (α j ) j=1
′
{ξ1′ , . . . , ξn(R
′ )−1 } = {ξ1 , . . . , ξn(R)−1 } ∩ (c, d) ,
sowie
′
{α′2 , . . . , α′n(R′ )−1 } = {α1 , . . . , αn(R) } ∩ [ξ1′ , ξn(R
′ )−1 ] .
Es folgt
S M (1[c,d] · f, R) =
n(R)
X
(ξ j − ξ j−1 )1[c,d] (α j ) f (α j ) =
j=1
c,d<[ξ j−1 ,ξ j ]
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
14
n(R)
X
j=1
c<ξ j−1 ,ξ j <d
′
n(R
)−1
X
(ξ j − ξ j−1 ) f (α j ) =
j=2
(ξ′j − ξ′j−1 ) f (α′j ) = S M ( f |[c,d] , R′ ) .
Wegen |R′ | ≤ |R| ≤ δ folgt |I − S M (1[c,d] · f, R)|
I = lim|R|→0 S M (1[c,d] · f, R).
<
ǫ. Daher gilt
❑
8.4.2 Bemerkung. Mit Hilfe von Bemerkung 8.2.3 sieht man leicht, dass die RiemannIntegrierbarkeit von 1[c,d] · f über [a, b] zu der von 1(c,d) · f bzw. 1(c,d] · f oder auch der
von 1[c,d) · f äquivalent ist. Die entsprechenden Integrale stimmen alle überein.
8.4.3 Definition. Eine Abbildung f : [a, b] → R (C) heißt stückweise stetige Funktion,
falls es eine Zerlegung a = t0 < t1 < · · · < tn = b von [a, b] gibt, sodass sich die
Funktionen f |(t j−1 ,t j ) stetig auf [t j−1 , t j ] fortsetzen lassen.
8.4.4 Bemerkung. Aus Lemma 8.4.1 folgt, dass jede stückweise stetige Funktion
Riemann-integrierbar ist.
Ist nämlich f : [a, b] → R (C) und sind a = t0 < t1 < · · · < tn = b, sodass sich
für alle j = 1, . . . , n, die Funktion f |(t j−1 ,t j ) stetig auf [t j−1 , t j ] fortsetzen lässt, so sind
alle Funktionen 1(t j−1 ,t j ) · f und daher auch ihre Summe Riemann-integrierbar. Diese
Summe unterscheidet sich aber von f nur an endlich vielen Punkten und ist daher
selbst Riemann-integrierbar.
Sei f auf [a, b] reell- bzw. komplexwertig und Riemann-integrierbar. Für das Folgende macht es Sinn, für ein c ∈ [a, b] das Integral von f über [c, c] als
Z c
f (x) dx := 0
c
zu definieren. Sind nun a ≤ u ≤ v ≤ w ≤ b, so folgt mit dieser Konvention aus Lemma
8.4.1, Lemma 8.2.9 und Bemerkung 8.4.2
Z
w
f (t) dt =
u
Z
a
bzw.
Z
b
a
1[u,w] (t) · f (t) dt =
b
1[u,v) (t) · f (t) dt +
Z
Z
a
a
b
1[u,v) (t) + 1[v,w] (t) · f (t) dt =
Z
b
1[v,w] (t) · f (t) dt =
w
u
Z
f (t) dt −
Z
v
f (t) dt =
u
Z
v
f (t) dt +
Z
w
f (t) dt ,
v
u
w
f (t) dt .
(8.10)
v
8.4.5 Satz (Hauptsatz der Diff.-Int.Rechnung). Sei f eine reell- oder komplexwertige
Funktion auf [a, b], die über [a, b] Riemann-integrierbar ist. Für x ∈ [a, b] definiere7
F(x) :=
Zx
f (t) dt .
a
7 Die
Existenz dieses Integrals für alle x ∈ [a, b] folgt aus Lemma 8.4.1.
8.4. DIFFERENTIAL UND INTEGRALRECHNUNG
15
Dann ist die Funktion F : [a, b] → R (C) stetig auf [a, b].
Ist f in einem Punkt x0 stetig, so ist F bei x0 differenzierbar, und es gilt8
F ′ (x0 ) = f (x0 ) .
Beweis. Als erstes sei bemerkt, dass gemäß unser Definition 8.2.1 die Funktion f als
Riemann-integrierbare Funktion auch beschränkt ist. Für a ≤ x < y ≤ b folgt wegen
(8.10)
y
Z
|F(y) − F(x)| = f (t) dt ≤ k f k∞ · (y − x) .
x
Insbesondere ist F stetig9 .
Sei nun f stetig bei einem x0 ∈ [a, b). Ist ǫ > 0 gegeben, so existiert δ > 0, sodass
| f (t) − f (x0 )| ≤ ǫ für alle t ∈ [a, b], |t − x0 | < δ .
Insbesondere gilt für x0 < x < min(x0 + δ, b) wegen (8.10) und (8.7) 10
Zx
f
(t)
−
f
(x
)
F(x)
−
F(x
)
0
0
≤ sup | f (t) − f (x )| ≤ ǫ .
= −
f
(x
)
dt
0
0
x − x0
x
−
x
0
x0
t∈[x0 ,x]
Also folgt F ′ (x0 )+ = limx→x0 +
F ′ (x0 )− = f (x0 ), wenn x0 ∈ (a, b].
F(x)−F(x0 )
x−x0
=
f (x0 ). Entsprechend zeigt man
❑
8.4.6 Bemerkung. Mit den Voraussetzungen von Satz 8.4.5 gilt für
Z b
Z b
Z x
G(x) :=
f (t) dt = G(x) =
f (t) dt −
f (t) dt
x
a
a
′
G (x) = − f (x). Setzen wir allgemein für a ≤ u ≤ v ≤ b
Z v
Z u
f (t) dt ,
f (t) dt := −
u
v
so folgt für jedes feste c ∈ [a, b]
Z
x
c
′
f (t) dt = f (x)
egal, ob x ≥ c oder x ≤ c.
Folgendes Korollar ist die Grundlage, Integrale mit Hilfe der Stammfunktion berechnen zu können.
8.4.7 Korollar. Ist f : [a, b] → R (C) stetig, und ist H : [a, b] → R (C) eine Stammfunktion von f , d.h. H ist auf [a, b] differenzierbar mit H ′ (x) = f (x) für alle x ∈ [a, b],
so gilt
Z b
f (t) dt = H(b) − H(a) .
a
8 Ist
x0 gleich a oder b, so meinen wir die links- bzw. rechtsseitige Differenzierbarkeit bzw. Ableitung.
9 Wir sehen, dass diese Funktion sogar Lipschitz stetig ist, d.h. dass |F(y) − F(x)| ≤ M · |y − x| für alle
x, y ∈ [a, b] mit einer festen Konstante M ≥ 0 gilt.
10 Man beachte, dass die Länge das Integrationsintervalles gerade x − x ist.
0
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
16
Rx
Beweis. Nach Satz 8.4.5 ist die Funktion F(x) = a f (t) dt ebenfalls eine Stammfunktion von f auf [a, b]. Somit unterscheiden sich H und F nur um eine Konstante,
F ≡ H + c auf [a, b]; vgl. Bemerkung 7.5.2. Wegen 0 = F(a) = H(a) + c ist H(a) = −c,
und somit
Z
b
a
f (t) dt = F(b) = H(b) + c = H(b) − H(a) .
❑
8.4.8 Beispiel. Wir wollen das Integral der Funktion ln x über das Intervall [1, 3] berechnen. Eine Stammfunktion von ln x auf (0, +∞) ist x(ln(x) − 1). Also folgt mit der
Konvention, dass g(x)|ba = g(b) − g(a),
Z 3
ln t dt = x(ln(x) − 1)|31 = 3(ln 3 − 1) − (−1) = 3 ln 3 − 2 .
1
Rπ
8.4.9 Beispiel. Um das bestimmte Integral 0 te2it dt zu berechnen, nehmen wir die
1 2ix
von xe2ix und erhalten
Stammfunktion 2ix e2ix − (2i)
2e
!π
Z π
x 2ix
1 2ix π
2it
te dt =
e −
e = .
2
2i
2i
(2i)
0
0
8.4.10 Bemerkung. Aus dem Hauptsatz sieht man insbesondere, dass für eine überall
Rx
auf [a, b] stetige Funktion f die Funktion F(x) = f (t) dt eine stetig differenzierbare
a
Funktion ist, die F ′ (x) = f (x) und F(a) = 0 erfüllt.
Ist umgekehrt F(x) = eine stetig differenzierbare Funktion auf [a, b] mit F(a) = 0,
so ist ihre Ableitung f stetig und wegen Satz 8.3.4 integrierbar. Die Funktion x 7→
Rx
f (t) dt hat nach dem Hauptsatz die selbe Ableitung wie F. Außerdem verschwinden
a
sie beide bei a, und daher F(x) =
Rx
a
f (t) dt, x ∈ [a, b]; vgl. Korollar 8.4.7.
Also wird C[a, b] durch den Integraloperator bijektiv auf {F ∈ C 1 [a, b] : F(a) = 0}
abgebildet. Die Umkehrabbildung ist dabei das Differenzieren. Man sieht auch leicht,
dass diese beiden Mengen Vektorräume sind, und dass dieser Integraloperator linear
ist.
8.4.11 Korollar. Ist f : [a, b] → R stetig mit f (x) ≥ 0 für alle x ∈ [a, b], und gilt
Rb
f (x) dx = 0, so verschwindet f identisch auf [a, b].
a
Beweis.
Die Funktion F(x) =
Rx
a
f (t) dt, x ∈ [a, b] ist in C 1 [a, b], erfüllt
F(a) = F(b) = 0 und hat für x ∈ (a, b) die Ableitung F ′ (x) = f (x) ≥ 0. Also
ist F(x) monoton wachsend, und somit 0 = F(a) ≤ F(x) ≤ F(b) = 0. Mit F
verschwindet auch F ′ = f identisch.
❑
Die in Lemma 7.5.4 kennengelernten Regeln zur Auffindung von Stammfunktionen
führen auf entsprechende Regeln zur Berechnung von Integralen.
8.5. WEITERE EIGENSCHAFTEN DES INTEGRALS
17
8.4.12 Lemma (Substitutionsregel). Sei f reell- oder komplexwertig und stetig auf
[a, b], und g ∈ C 1 [α, β] reellwertig mit g([α, β]) ⊆ [a, b]. Dann gilt
Z g(β)
Z β
f (x) dx =
f (g(t))g′ (t) dt .
α
g(α)
R
Beweis. Nach Lemma 7.5.4 ist ( f ) ◦ g eine Stammfunktion von f (g(t))g′ (t). Aus
Korollar 8.4.7 folgt daher die behauptete Gleichheit.
❑
Ähnlich beweist man folgendes Lemma.
8.4.13 Lemma (Partielle Integration). Seien f, g ∈ C 1 [a, b]. Dann gilt
Zb
′
f g dx = f (b)g(b) − f (a)g(a) −
a
Zb
f g′ dx .
a
Für f (b)g(b) − f (a)g(a) schreibt man auch f g|ba .
Folgender Satz wird ebenfalls Hauptsatz der Differential-Integralrechnung genannt.
Dieser ist dem Satz 8.4.5 zwar sehr ähnlich, aber auf den zweiten Blick unterscheiden
sie sich doch durch die Voraussetzungen wesentlich.
8.4.14 Satz (*). Sei f : [a, b] → R Riemann-integrierbar über [a, b], sodass es eine
stetige Funktion F : [a, b] → R gibt, die auf (a, b) differenzierbar ist und die dort
F ′ (x) = f (x) erfüllt. Dann gilt
Zb
f (x) dx = F(b) − F(a) .
a
Beweis. Sei {ξ j : j = 0, . . . , n} eine Zerlegung von [a, b]. Dann existieren nach dem
Mittelwertsatz der Differentialrechnung Satz 7.2.6 Zwischenstellen αi , ξi−1 ≤ αi ≤ ξi ,
sodass
F(ξi ) − F(ξi−1 ) = (ξi − ξi−1 ) f (αi ) .
n(R)
Somit ist R = (ξ j ) j=0 ; (α j )n(R)
j=1 eine Riemann-Zerlegung von [a, b]. Es folgt
F(b) − F(a) =
n
X
i=1
X
F(ξi ) − F(ξi−1 ) =
(ξi − ξi−1 ) f (αi ) = S (R) .
Für |R| → 0 strebt die rechte Seite gegen
n
i=1
Rb
f (x)dx.
a
❑
Man beachte, dass Satz 8.4.14 nur auf reellwertige Funktionen anwendbar ist, da
im Beweis der Mittelwertsatz der Differentialrechnung verwendet wird, der ja nur für
reellwertige Funktionen gilt.
8.5 Weitere Eigenschaften des Integrals
Sind f und g im folgenden Satz stetig, so ist die Aussage des Satzes eine einfache
Konsequenz aus der Tatsache, dass stetige Funktionen integrierbar sind.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
18
8.5.1 Satz (*). Sind f, g reellwertig und über [a, b] Riemann-integrierbar, so sind es
auch | f |, f 2 , f g und
b
b
Z
Z
f dx ≤
| f |dx .
a
a
Beweis. Sei ǫ > 0 gegeben. Nach Satz 8.2.5 existiert eine Zerlegung
Z = {ξi : i = 0, . . . , n(Z)} von [a, b], sodass
O( f, Z) − U( f, Z) < ǫ .
Setze für i = 0, . . . , n(Z)
sup
Mi =
f (x), mi =
x∈[ξi−1 ,ξi ]
Mi∗ =
sup | f (x)|, m∗i =
x∈[ξi−1 ,ξi ]
inf
f (x),
inf
| f (x)| .
x∈[ξi−1 ,ξi ]
x∈[ξi−1 ,ξi ]
Für x, y ∈ [ξi−1 , ξi ] folgt | f (x)| − | f (y)| ≤ | f (x) − f (y)| ≤ Mi − mi , und mit Hilfe von
Lemma 2.9.11
Mi∗ − m∗i =
sup | f (x)| + sup (−| f (x)|) =
x∈[ξi−1 ,ξi ]
x∈[ξi−1 ,ξi ]
sup
x,y∈[ξi−1 ,ξi ]
(| f (x)| − | f (y)|) ≤ Mi − mi .
Es folgt
O(| f |, Z) − U(| f |, Z) =
≤
n(Z)
X
i=1
n(Z)
X
i=1
(Mi∗ − m∗i )(ξi − ξi−1 ) ≤
(Mi − mi )(ξi − ξi−1 ) = O( f, Z) − U( f, Z) < ǫ .
und nach (8.3) ist | f | integrierbar. Die behauptete Ungleichung folgt aus Lemma 8.2.9,
(ii).
Ist Z wie oben, so folgt aus der Tatsache, dass x 7→ x2 monoton wachsend auf
+
R ∪ {0} ist,
sup f (x)2 − inf f (x)2 = (Mi∗ )2 − (m∗i )2
x∈[ξi−1 ,ξi ]
x∈[ξi−1 ,ξi ]
=
(Mi∗
+
m∗i )(Mi∗
− m∗i ) ≤ 2k f k∞ · (Mi∗ − m∗i ) .
Nun sehen wir wegen
2
2
O( f , Z) − U( f , Z) =
≤ 2k f k∞
n(Z)
X
i=1
n(Z)
X
i=1
sup
x∈[ξi−1 ,ξi ]
2
f (x) −
inf
x∈[ξi−1 ,ξi ]
f (x) (ξi − ξi−1 ) ≤
2
(Mi∗ − m∗i )(ξi − ξi−1 ) = 2k f k∞ O(| f |, Z) − U(| f |, Z) < 2k f k∞ · ǫ
wie oben, dass auch f 2 integrierbar ist. Die Behauptung für f g folgt aus der Beziehung
fg =
1
( f + g)2 − f 2 − g2 .
2
❑
8.6. UNEIGENTLICHE INTEGRALE
19
8.5.2 Bemerkung (*). Sind die Funktionen in Satz 8.5.1 komplexwertig, so sind mit f, g
auch Re f, Im f, Re g, Im g Riemannintegrierbar. Da man | f |2 , Re f g, Im f g als Summe
von Produkten von Re f, Im f, Re g, Im g darstellen kann, sind auch | f |2 , f g Riemannintegrierbar.
p
Man zeigt auch ähnlich wie im Beweis von Satz 8.5.1, dass mit | f |2 auch | f |2 = | f |
Riemann-integrierbar ist.
8.6 Uneigentliche Integrale
Angenommen, eine Funktion f : [a, b) → R (C) lässt sich zu einer Riemannintegrierbaren Funktion f˜ : [a, b] → R (C) fortsetzen, dann folgt aus dem Hauptsatz
lim
x→b
Z
x
f (t) dt =
Z
b
f˜(t) dt .
(8.11)
a
a
Hat die Funktion f : [a, b) → R (C) nicht die Eigenschaft, dass sie sich auf [a, b]
zu einer Riemann-integrierbaren Funktion
R x fortsetzen lässt, so kann man immer noch
versuchen, für x ∈ [a, b) das Integral a f (t) dt zu berechnen, und dann x gegen b
streben zu lassen.
8.6.1 Definition. Sei f : [a, b) → R (C), wobei a < b ≤ +∞, und sei f |[a,x] für alle
x ∈ [a, b) Riemann-integrierbar. Dann heißt f uneigentlich integrierbar, falls
Z
b
f (t) dt := lim
β→b−
a
Z
β
f (t)dt
a
Rb
existiert. Dazu sagen wir auch, dass a f (t) dt konvergiert. Entsprechend definiert man
uneigentliche Integrale für Funktionen f : (a, b] → R (C), wenn −∞ ≤ a < b.
Ist f : (a, b) → R (C), so definiert man mit einem beliebigen c ∈ (a, b)
Z
b
f (t) dt := lim
β→b−
a
Z
c
β
f (t)dt + lim
α→a+
Z
c
f (t)dt ,
(8.12)
α
falls die Grenzwerte existieren.
Eine reell- bzw. komplexwertige Funktion f heißt absolut uneigentlich integrierRb
bar, falls | f | uneigentlich integrierbar ist. Dazu sagt man auch, dass a f (t) dt absolut
konvergiert.
Man sieht leicht, dass (8.12) nicht von der Wahl von c ∈ (a, b) abhängt.
8.6.2 Beispiel.
(i) Für a ∈ R rechnet man
Z
Z +∞
−t
e dt = lim
β→+∞
a
a
β
e−t dt = lim −(e−β − e−a ) = e−a .
β→+∞
(ii) Mit der Regel von de l’Hospital erhält man für ein b > 0
Z
0
b
ln t dt = lim
α→0+
Z
α
b
ln t dt = b(ln(b) − 1) − lim α(ln(α) − 1) = b(ln(b) − 1) .
α→0+
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
20
(iii) Bei der Berechnung von
Z
+∞
sin πt
dt
(8.13)
t
1
sieht man, dass bei uneigentlichen Integralen ähnliche Phänomene auftreten, wie
bei Reihen. In der Tat gilt
Z [β]
Z β
Z β
sin πt
sin πt
sin πt
dt =
dt +
dt =
t
t
t
1
[β]
1
[β]−1
X
(−1)n
n=1
Z
n+1
n
| sin πt|
dt +
t
Z
β
[β]
sin πt
dt .
t
R n+1
Man erkennt unschwer, dass n | sint πt| dt monoton gegen Null für n → ∞ konvergiert. Mit Hilfe des Leibnizschen Kriteriums und wegen
Z β
Z [β]+1
sin πt 2 β→+∞
1
dt
| sin πt| dt =
−→ 0
≤
t
[β] [β]
π[β]
[β]
sieht man, dass (8.13) konvergiert.
Das Integral ist aber nicht absolut konvergent in dem Sinne, dass auch
existiert, da
Z
1
β
R β sin πt t dt
1
Z 1
[β]−1
[β]−1
X Z n+1 | sin πt|
X 1
sin t dt ≥
dt
=
|
sin
πt|
dt
·
t n+1
n+1
0
n=1 n
n=1
für β → +∞ divergiert.
Das wohl am meisten verwendete und ähnlich wie bei den Folgen zu beweisende
Kriterium für die absolute Konvergenz ist das folgende Resultat.
8.6.3 Lemma. Seien f, g : [a, b) → R (C), wobei a < b ≤ +∞, und sei f |[a,x] und g|[a,x]
sowie der Betrag dieser Funktionen für alle x ∈ [a, b) Riemann-integrierbar.
Rb
Ist a g(x) dx absolut konvergent, so ist es auch konvergent. Gilt obendrein die
Rb
Ungleichung |g(x)| ≥ | f (x)| für alle x ∈ [c, b) mit einem c ∈ [a, b), so ist auch a f (x) dx
absolut konvergent und somit auch konvergent.
Entsprechende Aussagen gelten für Funktionen, die auf Intervallen der Bauart
(a, b] bzw. (a, b) definiert sind.
Beweis. Wegen den Ungleichungen
Z x
Z x
Z x2
Z x2
2
2
|g(t)| dt ,
|
f
(t)|
dt
≤
g(t)
dt
|g(t)|
dt,
≤
x1
x1
x1
x1
R x
vererbt sich die Eigenschaft, dass a |g(t)| dt
ein Cauchy-Netz ist auch auf
x≥a
R x
R x
g(t) dt x≥a bzw. a | f (t)| dt x≥a . Die behauptete Konvergenz folgt dann aus Lemma
a
5.3.11.
❑
8.6.4 Bemerkung. Man kann Lemma 8.6.3 anwenden, um aus der Divergenz eines
Rb
Rb
uneigentlichen Integrales a | f (x)| dx auf die Divergenz von a |g(x)| dx zu schließen,
wenn |g(x)| ≥ | f (x)| für alle x ∈ (a, b).
8.6. UNEIGENTLICHE INTEGRALE
21
8.6.5 Beispiel. Man betrachte das uneigentliche Integral
Z β
Z +∞
Z 1
x ln x
x ln x
x ln x
dx
:=
lim
dx
+
lim
dx .
2
3
2
3
β→+∞ 1 (x2 + 1)3
α→0+ α (x + 1)
(x + 1)
0
Da die Funktion h(x) := x ln x nur für x ∈ (0, +∞) definiert ist, ist dieses Integral
uneigentlich an beiden Integrationsgrenzen. Die Funktion h(x) lässt sich aber stetig auf
[0, +∞) durch h(x) = 0 stetig fortsetzen. Somit bleibt nur die Uneigentlichkeit bei der
Stelle +∞; vgl. (8.11).
Für x ≥ 1 ist der Integrand nicht negativ. Somit ergeben dort die Abschätzungen
x2
x2
1
x ln x = x ln x ≤
≤
(x2 + 1)3 (x2 + 1)3 (x2 + 1)3 (x2 )3 = x4 .
Wegen
Z
1
1 ∞ 1
dx
=
−
=
3
x4
3x3 0
1
folgt aus Lemma 8.6.3 die absolute Konvergenz unseres Integrals.
∞
8.6.6 Beispiel. Man betrachte das uneigentliche Integral
Z 1
ln x
dx .
2x
x
0 e −e
Dieses ist nur uneigentlich bei 0. Für x ∈ (0, 1] gilt
ln x = − ln x .
e2x − e x e2x − e x
Wegen e−x ≥ 1/e für alle x ∈ [0, 1] folgt
− ln x
1 − ln x
− ln x
≥
.
= e−x x
e − 1 e ex − 1
e2x − e x
Weiters gilt − ln x ≥ 1 für alle x ∈ (0, 1/e], d. h.
1 1
− ln x
≥ 1(0,1/e] (x) ·
≥ 0, x ∈ (0, 1] .
e ex − 1
e2x − e x
Dabei ist 1(0,1/e] die Charakteristische Funktion des Intervalls (0, 1/e]. Für alle ǫ ∈
(0, 1/e) erhalten wir mit der Monotonie des Integrals
Z 1 Z 1/e
Z
1 1/e e−x
1
ln x dx ≥ 1
dx .
Iǫ :=
dx
=
e2x − e x e ǫ ex − 1
e ǫ 1 − e−x
ǫ
Nun steht im Zähler die Ableitung des Nenners, d. h. eine Stammfunktion des Integranden ist ln(1 − e−x ). (Wegen x > 0 ist das Argument des Logarithmus positiv.) Daraus
ergibt sich
1/e 1 1 − e−1/e
1
.
Iǫ ≥ ln(1 − e−x ) = ln
ǫ
e
e
1 − e−ǫ
Für ǫ → 0+ konvergiert die rechte Seite und damit auch die linke Seite gegen +∞.
Insbesondere divergiert das uneigentliche Integral
Z 1 ln x dx ,
2x
x
0 e −e
und damit auch das im Beispiel angegebene.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
22
8.7 Vertauschung von Integralen mit Grenzwerten
Das folgende Lemma ist eine unmittelbare Verallgemeinerung von Lemma 6.6.11.
Auch den Beweis kann man fast wörtlich übernehmen.
8.7.1 Lemma. Seien (I, I ) und (J, J ) zwei gerichtete Mengen, und sei hY, di ein
vollständig metrischer Raum.
Weiters seien H : I × J → Y und h : I → Y Funktionen, sodass für alle j ∈ J die
Funktion H j : I → Y, i 7→ H(i, j) beschränkt ist, und sodass
h(i) = lim H(i, j)
j∈J
gleichmäßig auf I, d.h.
∀ǫ > 0 ∃ j0 ∈ J : ∀ j j0 , ∀i ∈ I : d(H(i, j), h(i)) ≤ ǫ ,
bzw. äquivalent dazu h = lim j∈J H j in hB(I, Y), d∞i11 .
Schließlich existiere für alle j ∈ J der Limes A j := limi∈I H(i, j). Unter diesen
Voraussetzungen ist sowohl (A j ) j∈J als auch (h(i))i∈I in Y konvergent, wobei
lim A j = lim h(i) ;
j∈J
i∈I
(8.14)
also gilt
lim lim H(i, j) = lim lim H(i, j) .
j∈J i∈I
i∈I j∈J
Beweis. Sei ǫ > 0 gegeben. Wegen der vorausgesetzten gleichmäßigen Konvergenz ist
H j j∈J in B(I, Y) ein Cauchy-Netz. Es existiert also ein j0 ∈ J, sodass für j, k j0 und
alle i ∈ I gilt
dY (H(i, j), H(i, k)) ≤ d∞ (H j , Hk ) ≤ ǫ .
Hält man j und k fest, so folgt dY (A j , Ak ) = limi∈I dY (H(i, j), H(i, k)) ≤ ǫ. Damit ist
(A j ) j∈J ein Cauchy-Netz, und wegen Lemma 5.3.11 konvergent. Setzen wir lim j∈J A j =:
A, so gilt
dY (h(i), A) ≤ dY (h(i), H(i, j)) + dY (H(i, j), A j) + dY (A j , A) .
Wähle j nach der vorausgesetzten gleichmäßigen Konvergenz so, dass für alle i ∈ I gilt
dY (h(i), H(i, j)) ≤ d∞ (h, H j) < ǫ und so, dass dY (A j , A) < ǫ. Für dieses j existiert ein
i0 ∈ I, sodass aus i i0 , die Ungleichung dY (H(i, j), A j) < ǫ folgt. Insgesamt erhalten
wir
dY (h(i), A) < 3ǫ für i ∈ I und i i0 .
❑
Aus diesem Lemma folgen nun eine Reihe wichtiger Ergebnisse.
8.7.2 Satz. Sei ( fn )n∈N eine Folge von Riemann-integrierbaren Funktionen auf [a, b]
mit Werten in R oder C. Gilt limn→∞ fn = f gleichmäßig auf [a, b], so ist auch f
Riemann-integrierbar, wobei
lim
n→∞
Zb
a
fn dx =
Zb
f dx .
a
Entsprechendes gilt für gleichmäßig konvergente Netze von Funktionen.
11 Wegen Satz 6.6.15 und Lemma 5.3.11 ist diese Tatsache, dass lim
j∈J H j in hB(I, Y), d∞ i existiert äquivalent dazu, dass (H j ) j∈J in hB(I, Y), d∞ i ein Cauchy-Netz ist.
8.7. VERTAUSCHUNG VON INTEGRALEN MIT GRENZWERTEN
23
Beweis. Um das letzte Lemma anwenden zu können, sei I = R die Menge aller
Riemann-Zerlegungen von [a, b] versehen mit der durch die Feinheit induzierte Ordnung und (J, J ) = (N, ≤). Weiters sei Y = R (C), versehen mit der Euklidischen
Metrik, je nachdem, wo die Funktionen hinein abbilden.
Wir setzen H(R, n) := S ( fn , R), h(R) = S ( f, R). Wegen Lemma 8.2.9, (ii), gilt
|H(R, n) − h(R)| = |S ( fn − f, R)| ≤ k fn − f k∞ · (b − a) = d∞ ( fn , f ) · (b − a) . (8.15)
Also konvergiert H(., n) gleichmäßig gegen h. Nach Lemma 8.7.1 folgt
lim
n→∞
Zb
fn dx = lim lim S ( fn , R)
n→∞ |R|→0
a
= lim lim S ( fn , R) = lim S ( f, R) =
|R|→0 n→∞
|R|→0
Zb
f dx ,
a
wobei limn→∞ S ( fn , R) = S ( f, R) für ein festes R ∈ R aus (8.15) folgt.
Der Beweis für Netze verläuft fast identisch.
❑
P∞
8.7.3 Beispiel. Sei n=0 an xn eine Potenzreihe mit positivem Konvergenzradius R.
Dann gilt für [a, b] ⊆ {x ∈ R : |x| < R}
Zb X
Z
∞
∞
X
n
an
an x dx =
a
n=0
n=0
b
xn dx =
a
∞
X
an n+1 b
x | x=a .
n
+1
n=0
Somit haben wir eine weitere Möglichkeit, Stammfunktionen auszurechnen. So ist et2
wa die Stammfunktion von e−x nicht als Summe von Produkten von Funktionen wie
Polynome, e hoch Polynomen, oder dergleichen darstellbar. Aber zumindest lässt sich
eine Stammfunktion F(x) als
F(x) =
Z
0
x
e
−t2
dt =
Z
0
∞
xX
j=0
X
(−1) j
(−1) j 2 j
t dt =
x2 j+1 ,
j!
(
j!)(2
j
+
1)
j=0
∞
anschreiben.
Mit Hilfe des Hauptsatzes können wir auch Differentiation und Limes vertauschen.
8.7.4 Korollar. Sei ( fn )n∈N eine Folge von reell- bzw. komplexwertigen und stetig differenzierbaren Funktionen definiert auf [a, b].
Existiert ein Punkt x0 ∈ [a, b], sodass ( fn (x0 ))n∈N konvergiert, und ist die Folge
( fn′ )n∈N gleichmäßig konvergent auf [a, b], so ist auch die Folge ( fn )n∈N gleichmäßig
konvergent auf [a, b], und es gilt
d
d
lim fn (x) = lim
fn (x), x ∈ [a, b] .
n→∞ dx
dx n→∞
Entsprechendes gilt für Netze von Funktionen.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
24
Rx
Beweis. Nach Satz 8.4.5 bzw. Bemerkung 8.4.6 gilt fn (x) = x fn′ (t) dt + fn (x0 ) für alle
0
x ∈ [a, b]. Setzen wir g := limn→∞ fn′ und A := limn→∞ fn (x0 ), so ist g wegen Korollar
6.6.13 stetig. Außerdem folgt für x ∈ [a, b] aus Satz 8.7.2
!
Z x
Z x
′
g(t) dt + A = lim
f (x) :=
fn (t) dt + fn (x0 ) = lim fn (x) ,
n→∞
x0
n→∞
x0
womit ( fn )n∈N zumindest punktweise gegen f (x) konvergiert. Nach Satz 8.4.5 ist die
linke Seite ableitbar, und daher gilt f ′ (x) = g(x) = limn→∞ fn′ (x), x ∈ [a, b].
Die Gleichmäßigkeit der Konvergenz folgt aus
Z x
′
k fn − f k∞ = sup | fn (x) − f (x)| = sup ( fn (t) − g(t)) dt + fn (x0 ) − A ≤
x∈[a,b]
x∈[a,b]
x0
n→∞
(b − a) · k fn′ − gk∞ + | fn (x0 ) − A| −→ 0 .
(8.16)
Der Beweis für Netze verläuft fast identisch.
❑
Dass aus der gleichmäßigen Konvergenz einer Funktionenfolge im Allgemeinen
nicht die gleichmäßige Konvergenz der Folge der Ableitungen folgt, zeigt
8.7.5 Beispiel. Sei fn (x) =
sin√ nx
n
für x ∈ R. Offensichtlich gilt
lim fn (x) = 0 ,
n→∞
und zwar gleichmäßig auf ganz R. Wegen
fn′ (x) =
√
n cos nx
gilt aber etwa limn→∞ fn′ (0) = +∞.
Wenden wir Korollar 8.7.4 auf Potenzreihen an, so erhalten wir folgendes Resultat.
Dieses zeigt insbesondere auch, dass die Taylorreihe zur Grenzfunktion einer Potenzreihe mit der gegebenen Potenzreihe übereinstimmt; vgl. Fakta 7.4.4, 7.
P
8.7.6 Proposition. Sei ∞
a zn eine Potenzreihe mit Konvergenzradius R > 0. Dann
P∞ n=0 n
hat die Potenzreihe n=0 (n + 1)an+1 zn denselben Konvergenzradius R.
Die Funktion
∞
X
f : (−R, R) → C, f (t) =
an t n
n=0
ist auf (−R, R) differenzierbar mit der Ableitung
f ′ (x) =
∞
X
(n + 1) an+1 xn .
n=0
Sie ist sogar beliebig oft differenzierbar mit (l ∈ N)
f (l) (x) =
∞
X
n=0
(n + l) · · · (n + 1) an+l xn ,
wobei auch diese Potenzreihe Konvergenzradius R hat. Insbesondere gilt
f (l) (0) = l! al .
(8.17)
8.7. VERTAUSCHUNG VON INTEGRALEN MIT GRENZWERTEN
25
P
n
Beweis. Dass der Konvergenzradius von ∞
prüft man entn=0 (n + 1)an+1 z auch R ist,
P
n
weder mit Hilfe des Majorantenkriteriums durch einen Vergleich mit ∞
n=0 |an z | nach,
12
oder man zeigt, dass
lim supn→∞
1
√n
|(n + 1)an+1 |
=
1
= R,
√
lim supn→∞ n+1 |an+1 |
vgl. Satz 6.7.7.
Für jedes feste r ∈ (0, R) konvergiert wegen Satz 6.7.7 die Funktionenfolge
PN
( n=0
an tn )N∈N auf [−r, r] gleichmäßig gegen f . Analog konvergiert die FunktionenPN−1
folge ( n=0
(n + 1)an+1 tn )N∈N auf [−r, r] gleichmäßig und zwar wegen Korollar 8.7.4
′
gegen f . Da r < R beliebig war, folgt die Behauptung.
Die Verallgemeinerung in (8.17) folgt nun leicht durch vollständige Induktion.
❑
8.7.7 Beispiel. Für x ∈ (−1, 1) ist die Funktion x 7→ ln(1 − x) beliebig oft differenzierP
1
n
bar. Da ln(1 − x)′ = − 1−x
=− ∞
n=0 x nach Proposition 8.7.6 mit der Ableitung von
P∞ xn
P
xn
x 7→ − n=1 n , x ∈ (−1, 1) übereinstimmt, und da ln(1 − x) und − ∞
n=1 n für x = 0
beide den Wert Null annehmen, folgt aus Korollar 7.2.9, dass
ln(1 − x) = −
∞
X
xn
für alle x ∈ (−1, 1) .
n
n=1
Da diese Reihe
auch für x = −1 (bedingt) konvergiert, folgt aus Satz 6.11.1, dass
P (−1)n
− ∞
=
ln(2).
n=1 n
Als Vorspiel zum nächsten Ergebnis wollen wir uns kurz mit dem Produkt zweier
metrischer Räume beschäftigen.
8.7.8 Fakta.
1. Seien hX, dX i und hY, dY i zwei metrische Räume. Ist X × Y die Menge aller geordneten Paare, und definiert man
d (a, b), (x, y) := max(dX (a, x), dY (b, y)) ,
(8.18)
so sieht man unmittelbar, dass (X × Y, d) ein metrischer Raum ist, und dass
(xn , yn ) → (x, y) genau dann, wenn xn → x und yn → y.
2. Sind K1 ⊆ X und K2 ⊆ Y jeweils kompakt, so ist es auch K1 × K2 , denn ist
(xn , yn ) n∈N eine Folge in K1 × K2 , so gibt es eine Teilfolge (xn(k) )k∈N , sodass
xn(k) → x ∈ K1 und weiter eine Teilfolge (yn(k( j)) ) j∈N mit yn(k( j)) → y ∈ K2 , also
(xn(k( j)) , yn(k( j)) ) → (x, y).
3. Die offene Kugel Uǫ (a, b) um ein (a, b) ∈ X × Y ist nichts anderes als Uǫ (a) ×
Uǫ (b), da
d (a, b), (x, y) = max(dX (a, x), dY (b, y)) < ǫ ⇔ dX (a, x) < ǫ ∧ dY (b, y) < ǫ .
4. Sind O1 ⊆ X, O2 ⊆ Y offen, so auch O1 × O2 ⊆ X × Y, da es zu (a, b) ∈ X × Y
sicherlich ein ǫ > 0 mit Uǫ (a) ⊆ O1 und Uǫ (b) ⊆ O2 gibt, und dann Uǫ (a, b) ⊆
O1 × O2 .
12 Um diese Gleichheit einzusehen, verwendet man am besten die Charakterisierung des Limes Superior
als größter Häufungspunkt; vgl. Proposition 5.2.3.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
26
5. Die Definition von d∞ auf R p passt genau in dieses Bild, denn haben wir p1 +
p2 = p, und sind sowohl R p1 als auch R p2 versehen mit d∞ , und versieht man
R p = R p1 × R p2 mit der Metrik aus (8.18), so erhält man genau wieder d∞ .
8.7.9 Korollar. Ist f : [a, b] × K → R (C) stetig, wobei K eine kompakte Teilmenge
eines metrischen Raumes (Y, dY ) ist, so ist auch die Funktion R : K → R (C) definiert
durch
Z
b
f (s, t) ds
R(t) =
a
stetig. R(t) nennt man Parameterintegral.
Beweis. Es gilt limt→t0 R(t) = limt∈K\{t0 } R(t) = R(t0 ) für ein beliebiges t0 ∈ K zu zeigen.
Dabei ist K \ {t0 } geordnet durch
t1 t2 ⇔ dY (t0 , t1 ) ≥ dY (t0 , t2 ) .
Wegen der Kompaktheit von [a, b] × K ist die Funktion f sogar gleichmäßig stetig; vgl.
Satz 6.3.3. Zu gegebenem ǫ > 0 gibt es somit ein δ > 0, sodass
d (s, t), (s′ , t′ ) < δ ⇒ | f (s, t) − f (s′ , t′ )| < ǫ .
Insbesondere folgt aus dY (t, t0 ) < δ wegen d (s, t), (s, t0 ) = dY (t, t0 ) die Ungleichung
| f (s, t) − f (s, t0 )| < ǫ für alle s ∈ [a, b] und somit
k f (., t) − f (., t0 )k∞ = sup | f (s, t) − f (s, t0 )| ≤ ǫ .
s∈[a,b]
Also konvergiert das Netz ( f (., t))t∈K\{t0 } gleichmäßig gegen die Funktion f (., t0 ) :
[a, b] → R (C). Wegen Satz 8.7.2 gilt dann
Z b
Z b
Z b
lim R(t) = lim
f (s, t0 ) ds = R(t0 ) .
lim f (s, t) ds =
f (s, t) ds =
t→t0
t→t0
a t→t0
a
a
❑
Mit unserem Grenzwertvertauschungssatz lässt sich auch die Vertauschbarkeit der
Integrationsreihenfolge zeigen.
8.7.10 Satz (Satz von Fubini). Ist f : [a, b] × [c, d] → R (C) stetig, so gilt
!
!
Z d Z b
Z b Z d
f (s, t) ds dt .
f (s, t) dt ds =
a
c
c
Beweis. Die Existenz der inneren Integrale wird durch
Integrale durch Korollar 8.7.9 gewährleistet.
Sei I = R die Menge aller Riemann-Zerlegungen
die Menge aller Riemann-Zerlegungen von [c, d] beide
Feinheit induzierten Ordnung. Wir definieren für R =
n(P) (η j )n(P)
j=0 ; (β j ) j=1
H(R, P) :=
Satz 8.3.4 und der äußeren
von [a, b] und sei J = P
gerichtet mit der durch die
n(R) (ξ j )n(R)
j=0 ; (α j ) j=1 und P =
n(R) X
n(P)
X
(ξ j − ξ j−1 )(ηk − ηk−1 ) f (α j , βk ) ,
j=1 k=1
(8.19)
a
(8.20)
8.7. VERTAUSCHUNG VON INTEGRALEN MIT GRENZWERTEN
27
und bemerken, dass
n(R)
X
(ηk − ηk−1 ) (ξ j − ξ j−1 ) f (α j , βk ) = S (S ( f1 , R), P) ,
H(R, P) =
k=1
j=1
|
{z
}
n(P)
X
=S ( f1 ,R)(βk )
wobei f1 die Funktion f mit festgehaltener zweiter Variablen ist, und S ( f1 , R) als
Funktion eben dieser Variable aus [c, d] betrachtet wird. Entsprechend gilt H(R, P) =
S (S ( f2 , P), R).
Wegen (8.9) gilt
|H(R, P1 ) − H(R, P2 )| = |S (S ( f1 , R), P1 ) − S (S ( f1 , R), P2 )| ≤
(8.21)
2(d − c) · sup{ |S ( f1 , R)(t) − S ( f1 , R)(t′ )| : t, t′ ∈ [c, d], |t − t′ | ≤ max(|P1 |, |P2 |) } .
Außerdem ist wegen Lemma 8.2.9, (ii),
|S ( f1 , R)(t) − S ( f1 , R)(t′ )| = S f (, t) − f (., t′ ) , R ≤ (b − a) · k f (., t) − f (., t′ )k∞ .
Da unsere Funktion f gleichmäßig stetig ist, gibt es zu gegebenen ǫ > 0 ein δ > 0,
sodass k f (., t) − f (., t′ )k∞ ≤ ǫ für alle t, t′ ∈ [c, d] mit |t − t′ | < δ. Aus (8.21) folgt dann
sup |H(R, P1 ) − H(R, P2 )| ≤ 2(d − c)(b − a)ǫ ,
R∈R
wenn nur |P1 |, |P2 | < δ. Somit ist H(., P) P∈J ein Cauchy-Netz in B(I, C)13 und konvergiert daher wegen Lemma 5.3.11 in B(I, C) bzgl. d∞ – also gleichmäßig – gegen
eine Funktion h : I → C, wobei
h(R) = lim H(R, P) = lim S (S ( f2 , P), R) =
|P|→0
|P|→0
S ( lim S ( f2 , P), R) = S (
|P|→0
Z
d
f (., t) dt, R) .
c
Daraus folgt
lim lim H(R, P) = lim S (
|R|→0 |P|→0
|R|→0
Z
d
f (., t) dt, R) =
c
Aus Symmetriegründen konvergiert auch H(R, .)
g : J → C, wobei
g(P) = lim H(R, P) = S (
|R|→0
Z
a
R∈I
Z
b
a
Z
d
!
f (s, t)dt ds .
c
in B(J, C) gegen eine Funktion
b
f (s, .) ds, P) ,
womit
lim lim H(R, P) = lim S (
|P|→0 |R|→0
|P|→0
Z
a
b
f (s, .) ds, P) =
Z
c
d
Z
b
a
!
f (s, t)ds dt .
13 Das ist der vollständig metrische Raum aller auf I beschränkten C-wertigen Funktionen versehen mit
d∞ , vgl. Definition 6.6.3.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
28
Weil alle Voraussetzungen von Lemma 8.7.1 erfüllt sind, erhalten wir
lim lim H(R, P) = lim lim H(R, P) ,
|R|→0 |P|→0
|P|→0 |R|→0
und damit (8.19).
❑
8.7.11 Bemerkung. Ist eine stetige reell- oder komplexwertige Funktion auf einem
Qp
Quader j=1 [a j , b j ] = [a1 , b1 ] × · · · × [a p , b p ] ⊆ R p definiert, so ist wegen Korollar
R bp
Q p−1
p−1
8.7.9 (t j ) j=1 7→ a f (t1 , . . . , t p−1 , s) ds stetig auf j=1 [a j , b j ] ⊆ R p−1 .
p
Nun kann man nach der vorletzten Variablen integrieren, dann nach der vorvorletzten, usw. . Schließlich erhält man
Z b1
Z bp
...
f (t1 , . . . , t p ) dt p . . . dt1 .
(8.22)
a1
ap
Wendet man Satz 8.7.10 mehrere Male an, so sieht man, dass es hier nicht auf die
Integrationsreihenfolge ankommt.
Man kann das als Ausgangspunkt für die Integrationstheorie für Funktionen, die auf
Q
einem Rechteck oder allgemeiner über einem Quader Q = pj=1 [a j , b j ] ⊆ R p definiert
sind, nehmen, indem man
Z
f (t) dt
Q
als (8.22) definiert. Dieser Ausdruck hängt zumindest für stetige f nicht von der Integrationsreihenfolge ab, ist also in einem gewissen Sinne sinnvoll definiert.
Größere Probleme tauchen auf, wenn man etwa das Integral einer stetigen Funktion über einen Kreis definieren will. Solche Integrale werden wir in der Analysis 3
Vorlesung behandeln.
Als Folgerung erhält man unmittelbar eine Aussage über die Differenzierbarkeit
von Parameterintegralen.
8.7.12 Korollar. Sei f : [a, b] × [c, d] → R(C) stetig und so, dass die Ableitung nach
der ersten Variablen für alle (s, t) ∈ [a, b] × [c, d] existiert, und dass
f1 (s, t) =
d
f (s, t)14 ,
ds
ebenfalls auf [a, b] × [c, d] stetig ist. Dann ist die Funktion s 7→
s ∈ [a, b] stetig differenzierbar mit der Ableitung
Z d
Z d
d
f1 (s, t) dt .
f (s, t) dt =
ds c
c
Rd
c
f (s, t) dt für
(8.23)
Beweis. Wegen Satz 8.7.10 und dem zweiten Hauptsatz gilt
Z xZ d
Z dZ x
Z d
f1 (s, t) dt ds =
( f (x, t) − f (a, t)) dt .
f1 (s, t) ds dt =
a
c
c
a
c
Differenziert man diese Gleichung nach der Variablen x, so erhält man (8.23). Dass
(8.23) stetig von s ∈ [a, b] abhängt, folgt aus Korollar 8.7.9.
❑
14 Dafür
werden wir später
∂
∂s
f (s, t) schreiben.
8.7. VERTAUSCHUNG VON INTEGRALEN MIT GRENZWERTEN
29
8.7.13 Beispiel. Als Anwendung der Grenzwertvertauschungen wollen wir folgende
besonders in der Statistik und Wahrscheinlichkeitstheorie wichtige Tatsache zeigen:
Z +∞
√
2
(8.24)
e−t dt = π .
−∞
Dazu betrachte man (x ∈ [0, C] mit C > 0 beliebig)
π
F(x) = −
4
Z
1
0
2 2
e−x (t +1)
dt .
t2 + 1
(8.25)
2 2
Die Ableitung des Integranden nach x ist −2xe−x (t +1) . Somit ist diese und offensichtlich der Integrand selber auf [0, C] × [0, 1] stetig. Aus Korollar 8.7.12 schließen wir
′
F (x) = 2xe
−x2
Z
1
2 2
e−x t dt .
0
Außerdem gilt
Z
1
1
π
dt = − arctan |10 = 0 .
2+1
4
t
0
R x 2 2
Rx 2
2
Ist andererseits G(x) = 0 e−t dt , so gilt G′ (x) = 2e−x 0 e−t dt, und aus der Substitutionsregel folgt F ′ (x) = G′ (x). Wegen G(0) = 0 = F(0) folgt F(x) = G(x) und
zwar für alle x ≥ 0, da ja C > 0 beliebig war.
F(0) =
−x2 (t 2 +1)
π
−
4
2
Wegen e t2 +1 ≤ e−x konvergiert der Integrand in (8.25) für x → +∞ gleichmäßig
gegen die Nullfunktion, und mit Satz 8.7.2 erhält man
lim G(x) = lim F(x) =
x→+∞
x→+∞
π
.
4
Aus der Stetigkeit der Wurzelfunktion folgt
lim
x→+∞
Z
x
√
π
,
2
2
e−t dt =
0
und damit (8.24).
8.7.14 Beispiel. Wir betrachten die Funktion
F(t) =
Z
0
+∞
sin x −xt
· e dx := lim
γ→0+
x
Z
γ
1
sin x −xt
· e dx + lim
β→+∞
x
Z
1
β
sin x −xt
· e dx .
x
Diese ist wohldefiniert für t ∈ [0, +∞), da obiges uneigentliches Integral für alle t ≥ 0
konvergiert, wobei es aber nur für t > 0 absolut konvergiert.
Man beachte dabei auch, dass 0 nicht wirklich eine Uneigentlichkeitsstelle obigen
Integrales ist, da sich die Funktion g(x) := sinx x , x ∈ (0, +∞) stetig auf [0, +∞) durch
g(0) := 1 = lim x→0+ sinx x fortsetzen lässt. Also gilt nach dem Hauptsatz der Differentialund Integralrechnung
lim
δ→0+
Z
1
δ
sin x −xt
· e dx =
x
Z
0
1
g(x) · e−xt dx .
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
30
Man betrachte, das Netz (α > 1)
Fα (t) =
Z
α
1
α
sin x −xt
· e dx
x
von Funktionen auf [0, +∞). Offenbar konvergiert
es punktweise gegen F(t).
Weiters wollen wir bemerken, dass sinx x ≤ 1, x > 0, da die Funktion sin x − x
bei Null verschwindet, und auf [0, +∞) eine Ableitung kleiner gleich Null hat und
somit monoton fallend ist. Also gilt sin x − x ≤ 0, x ∈ [0, +∞) und daher sinx x ≤ 1
sicher für x ∈ (0, 1]. Für x > 1 ist diese
klarerweise auch richtig, da
Ungleichung
.
| sin x| ≤ 1, x ∈ R, und für x < 0 gilt sinx x = sin(−x)
−x
Wir wollen nun limt→+∞ F(t) berechnen. Dazu betrachten wir F(t) für t ∈ [δ, +∞)
für ein festes δ > 0, und bemerken, dass für t ≥ δ
Z 1
Z β
α sin x
sin x −xt −xt
|F(t) − Fα (t)| = lim
· e dx + lim
· e dx ≤
β→+∞ α
x
x
γ→0+ γ
lim
γ→0+
Z
1
α
Z
1
α
e−δx dx + lim
β→+∞
γ
e−δx dx +
Z
β
e−δx dx =
α
1
+∞
e−δx dx =
α
0
Z
1 − e− α + e−α
.
δ
Der Ausdruck rechts konvergiert für α → +∞ gegen 0 und zwar unabhängig von t ∈
[δ, +∞). Also konvergiert Fα gegen F gleichmäßig auf [δ, +∞).
Andererseits gilt nach Satz 8.7.2 für ein festes α > 1
Z α
sin x −xt
lim Fα (t) = lim
· e dx =
t→+∞
t→+∞ 1
x
α
Z
α
sin x −xt
· e dx =
t→+∞ x
lim
1
α
Z
α
0 dx = 0 ,
1
α
1
da wegen sinx x · e−xt ≤ e−t α das Netz von Funktionen x 7→ sinx x · e−xt , x ∈ [ α1 , α] für
t → +∞ gleichmäßig gegen 0 konvergiert.
Setzen wir also H(t, α) := Fα (t) für (t, α) ∈ [δ, +∞)×(1, +∞), wobei diese Intervalle
jeweils gegen +∞ gereichtet sind, so folgt aus Lemma 8.7.1
lim F(t) = lim lim Fα (t) = lim lim Fα (t) = lim 0 = 0 .
t→+∞
t→+∞ α→+∞
α→+∞ t→+∞
α→+∞
Nun wollen wir F ′ (t) für t > 0 berechnen. Dazu halten wir wieder δ > 0 fest und
betrachten t ∈ [δ, +∞). Wir wissen schon, dass Fα → F und zwar gleichmäßig auf
dieser Menge. Betrachten wir nun für ein festes α > 1 die das Integral
Z α
sin x −xt
Fα (t) =
· e dx ,
1
x
α
so ist der Integrand stetig in (x, t) ∈ [ α1 , α] × [δ, +∞), und auch die Ableitung
∂ sin x −xt
· e = − sin x · e−xt
∂t x
8.7. VERTAUSCHUNG VON INTEGRALEN MIT GRENZWERTEN
31
des Integranden nach t (∈ [δ, +∞)) ist stetig in (x, t) ∈ [ α1 , α] × [δ, +∞). Also gilt nach
Korollar 8.7.12
Z α
Fα′ (t) =
Wegen (t ∈ [δ, +∞))
Z
− sin x · e−xt dx .
+∞
− sin x · e−xt dx −
0
Z
1
α
1
α
Z
Z
α
1
α
− sin x · e−xt dx ≤
1
+∞
1 − e− α + e−α
δ
α
0
konvergiert Fα′ (t) für α → +∞ unabhängig von t ≥ δ, daher gleichmäßig in t ∈ [δ, +∞),
gegen
Z
e−δx dx +
e−δx dx =
+∞
0
− sin x · e−xt dx .
Gemäß Korollar 8.7.4 ist das somit genau F ′ (t) und zwar für t ∈ (0, +∞), da ja das feste
δ > 0 beliebig war. Wegen
Z +∞
+∞
1
1
−xt − sin x · e−xt dx =
(t
sin
x
+
cos
x)e
, t > 0,
0 = −
2
1+t
1 + t2
0
folgt F(t) = C − arctan t, t ∈ (0, +∞) für ein festes reelles C. Lässt man t gegen +∞
streben, so sieht man, dass C = π2 .
Schließlich gilt für t ≥ 015
Z 1
Z +∞
sin x −xt
1 −xt
F(t) =
· e dx +
· e sin x dx .
x
x
0
1
Das erste Integral ist gemäß Korollar 8.7.9 stetig in t ∈ [0, +∞). Für das zweite stimmt
nach einer partiellen Integration überein mit
#β
"
Z β
1 t sin x + cos x −xt
1 t sin x + cos x −xt
−
lim
e
e dx .
(8.26)
lim −
β→+∞ 1 x2
β→+∞
x
1 + t2
1 + t2
1
Man beachte, dass der erste Grenzwert genau
t sin 1 + cos 1 −t
e
1 + t2
x+cos x −xt ist, und somit auch stetig in t ∈ [0, +∞) ist. Wegen t sin1+t
e
≤ 1 gilt für t ≥ 0
2
Z +∞
Z +∞
Z β
1 t sin x + cos x −xt 1
1 t sin x + cos x −xt
e dx −
e dx ≤
dx .
2
2
2
2
2
x
1
+
t
x
1
+
t
x
1
β
1
Also konvergiert das Netz
Z
1
β
1 t sin x + cos x −xt
e dx
x2
1 + t2
von stetigen (siehe Korollar 8.7.9) Funktion in t ∈ [0, +∞) gleichmäßig gegen den
zweiten Grenzwert aus (8.26). Also ist auch dieser stetig; vgl. Korollar 6.6.13. Damit
haben wir die Stetigkeit von F(t) auf ganz [0, +∞) nachgewiesen.
Da aber F(t) = π2 − arctan t für t > 0 folgt für t → 0+ die Gleichung
Z +∞
π
sin x
dx = F(0) = .
x
2
0
15 Man
denke sich wieder
sin x
x
bei x = 0 stetig fortgesetzt mit dem Wert 1.
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
32
8.8 Mittelwertsatz
Folgende Tatsache liegt unmittelbar auf der Hand.
8.8.1 Satz (Mittelwertsatz der Integralrechnung). Seien f und g reelle und Riemannintegrierbare Funktion auf [a, b], wobei g(t) ≥ 0, t ∈ [a, b]. Dann existiert ein µ ∈
[inf t∈[a,b] f (t), supt∈[a,b] f (t)] mit
Zb
f (t)g(t) dt = µ
a
Zb
g(t) dt .
(8.27)
a
Ist f stetig, so gibt es ein x ∈ [a, b], sodass µ = f (x).
Beweis. Man betrachte die Ungleichung
g(s) inf f (t) ≤ g(s) f (s) ≤ g(s) sup f (t) ,
t∈[a,b]
t∈[a,b]
und integriere alle Funktionen nach s. Nach Lemma 8.2.9 erfüllen die Integrale die
selbe Ungleichungskette. Daraus folgt unmittelbar (8.27). Für ein stetiges f ist nach
dem Zwischenwertsatz f (x) = µ für ein x ∈ [a, b].
❑
Für g(t) = t erhalten wir aus Satz 8.8.1 unmittelbar, dass für ein Riemannintegrierbares f : [a, b] → R
Zb
f (t) dt = µ(b − a) ,
(8.28)
a
wobei im Falle der Stetigkeit von f gilt, dass µ = f (x) für ein gewisses x ∈ [a, b].
Als Anwendung können wir mit Satz 8.8.1 die Darstellung des Restgliedes im Satz
von Taylor, Satz 7.4.2, unter etwas stärkeren Voraussetzungen nochmals ableiten. Dazu
benötigen wir zunächst eine Darstellung dieses Restgliedes in Integralform, die aber
auch für komplexwertige Funktion gültig ist.
8.8.2 Proposition. Sei I ⊆ R ein Intervall und n ∈ N ∪ {0}. Weiters sei f : I → R oder
f : I → C mit f ∈ C n+1 (I). Für x, y ∈ I, x , y gilt
f (x) = f (y) +
f ′ (y)
f ′′ (y)
f (n) (y)
(x − y) +
(x − y)2 + · · · +
(x − y)n +
1!
2!
n!
+
Zx
f (n+1) (t)
(x − t)n
dt .
n!
y
Beweis. Um diese Formel einzusehen, starten wir mit
f (x) − f (y) =
Zx
y
f ′ (t) dt ,
8.9. ÜBUNGSBEISPIELE
33
und integrieren partiell:
f (x) − f (y) = −
Zx
′
′
f (t)(−1) dt = f (y)(x − y) +
y
Zx
f ′′ (t)(x − t) dt =
y
(x − y)2
+
= f (y)(x − y) + f (y)
2
′
′′
Zx
f ′′′ (t)
(x − t)2
dt =
2
y
= ··· =
n
X
f (k) (y)
k=1
(x − y)k
+
k!
Zx
f (n+1) (t)
(x − t)n
dt .
n!
y
❑
8.8.3 Bemerkung. Ist f reellwertig, so folgt aus Satz 8.8.1, dass sich das Restglied in
n+1
der Form f (n+1) (ξ) (x−y)
(n+1)! für ein geeignetes ξ ∈ [min(x, y), max(x, y)] schreiben lässt;
vgl. Satz 7.4.2.
8.9 Übungsbeispiele
8.1 Man betrachte die Funktion f (x) = x3 + 1 : [0, 1] → [0, 1]. Wählen Sie n + 1 äquidistante
Stützstellen, und berechnen Sie zur entsprechenden Zerlegung Zn von [0, 1] die Ober- und
die Untersummen, sowie limn→∞ O(Zn ), limn→∞ U(Zn ).
P
Hinweis: 4 nk=1 k3 = n2 (n + 1)2 .
8.2 Berechnen Sie das Integral aus dem vorherigen Beispiel mit Hilfe von Riemannschen Zwischensummen mit n + 1 äquidistanten Stützstellen, und Zwischenstellen an den Intervallmittelpunkten.
8.3 Seien a, b ∈ R, a < b und bezeichne R die Menge aller Riemannzerlegungen von [a, b]
gerichtet durch die Feinheit. Zeigen Sie, dass dass für ein Netz ( f (R))R∈R mit Werten in
einem metrischen Raum folgende Aussagen äquivalent sind:
lim f (R) = y, dh. ∀ǫ > 0 ∃R0 ∈ R : ∀R R0 ⇒ d( f (R), y) < ǫ .
R∈R
∀ǫ > 0 ∃δ > 0 : ∀|R| < δ ⇒ d( f (R), y) < ǫ .
∀(Rn )n∈N mit lim |Rn | = 0 gilt lim f (Rn ) = y
n→∞
n→∞
8.4 Seien a, b ∈ R, a < b und f : [a, b] → C stetig. Weiters bezeichne R die Menge aller Rien(R)
mannzerlegungen von [a, b] gerichtet durch die Feinheit. Zu jedem R = ((ξ j )n(R)
j=0 , (α j ) j=1 ) ∈
R sei F(R) die Funktion auf [a, b] definiert durch
F(R)(x) = f (α j ) ,
wenn x ∈ [ξ j−1 , ξ j ), und F(R)(b) = f (αn(R) ).
Man zeige, dass dann limR∈R F(R) = f und zwar in B([a, b], C) bezüglich der Metrik d∞ ,
also gleichmäßig.
8.5 Man berechne folgende Integrale:
Ze
1
ln x
dx
,
x
Z
2
1
dx
.
x3 + x
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
34
8.6 Man berechne folgende Integrale:
Z
0
Z
x
dx,
x2 − 3x + 2
−1
3
4
1
4
x+1
dx .
x4 − x
8.7 Man berechne durch geeignte Substitutionen folgende Integrale:
√
Z 1 x
Z 5
e −1
x− x
5 x
dx,
√ dx .
x
−4 e + 1
1 x+
8.8 Man berechne folgende Integrale:
Z
9
Z
x3
dx,
4x − 1
5
−2
−3
1
dx .
x2 − 1
8.9 Man berechne die Integrale:
Z
π
2
π
8
1
dx,
sin x
8.10 Man berechne
Z
π
4
0
Z
π
4
π
8
1
dx .
sin2 x cos4 x
2 sin x + tan x
dx .
1 + cos x
8.11 Zeigen Sie mit Hilfe der Integralrechnung (Ober-, Unter-, Riemannsummen), dass
lim
n→∞
1k + 2k + . . . + nk
1
=
nk+1
k+1
k+1
(k, n ∈ N) .
Hinweis: xk+1 ist eine Stammfunktion von xk und es gilt
eine Stammfunktion von f ist.
8.12 Für m, n ∈ Z berechnen Sie
Z
Rb
a
f (x) dx = F(b) − F(a), wenn F
2π
exp(int) · exp(imt) dt ,
0
sowie
Z
2π
0
sin(nt) · sin(mt) dt,
Z
2π
0
cos(nt) · cos(mt) dt,
Z
2π
0
sin(nt) · cos(mt) dt .
Rb
Hinweis: Es gilt a f (x) dx = F(b) − F(a), wenn F eine Stammfunktion von f ist. Unterscheiden Sie dabei den Fall m = n und m , n. Um Rechenarbeit zu sparen, kann man die
letzten drei Integrale auf das erste zurück führen.
8.13 Man zeige:
Dn (t) :=
sowie
Rπ
−π
n
n
1
1 X ikt sin(n + 2 )t 1
t
1 X
= (cos nt + cot · sin nt) ,
+
cos mt =
e =
t
2 m=1
2 k=−n
2
2
2 sin 2
Dn (t) dt = π.
8.14 Sei f (x) eine auf ganz R definierte Funktion. Wir nehmen an, dass f (x) stetig und 1periodisch ist, dh. f (x) = f (x + 1) für alle x ∈ R. Man zeige, dass f (x) auf R beschränkt ist.
Weiters beweise man, dass für beliebiges α ∈ R folgende Gleichheit gilt:
Z
1
f (x)dx =
0
Z
α+1
f (x)dx .
α
8.9. ÜBUNGSBEISPIELE
35
8.15 Sind folgende uneigentliche Integrale absolut konvergent oder nicht?
Z +∞
Z π
Z 1
2
x ln x
ln x
dx,
dx .
ln(sin x) dx,
2x
x
2 + 1)3
e
−
e
(x
0
0
0
Rb
Hinweis zur Divergenz: Wenn ein uneigentliches Integral a | f (x)| dx divergiert, und wenn
Rb
|g(x)| ≥ | f (x)|, dann divergiert auch a |g(x)| dx (Divergente Minorante).
1
,
4x2 −12x+13
8.16 Man bestimme die Fläche unter der Kurve
wenn x in [−1, 2] läuft.
8.17 Man berechne mit Hilfe eines Riemannintegrals den Flächeninhalt eines Kreises mit dem
Radius r > 0.
Weiters berechne den Flächeninhalt folgender Teilmenge der Ebene:
{(x, y) ∈ R2 : x2 + y2 ≤ 1, y ≥ x2 }.
8.18 Welche folgender Integrale sind eigentliche bzw. uneigentliche Riemann-Integrale? Weiters
berechne man diese (r > 0):
√
Z 1
Z r √
Z 3
x2 + 4x + 5
1
2
2
dx .
dx,
r − x dx,
√
√
0
−r
1 2+ x+
9x − 4x2
x2 + 4x + 5
Hinweis: Zum letzten Integral: Substituieren Sie zuerst so, dass x2 + 4x + 5 = (x + 2)2 + 1 =
t2 + 1.
8.19 Für welche α ∈ R \ {0} existieren die (unbestimmten) Integrale:
Z 1
Z +∞
Z +∞
xα dx,
xα dx,
xα dx .
0
1
0
Im Falle der Existenz berechne man diese! Weiters berechne man (falls existent)
Z +∞
ln t
dt .
t2
1
8.20 Man berechne
Z
+∞
(t2 − 2t + 2) exp(−|t| · (2 + iπ)) dt .
−∞
Weiters betrachte man den Betrag f (x) des Integranden als Funktion von R nach R. Man bestimme lokal und globale Extrema, limx→+∞ f (x), limx→−∞ f (x). Wo ist f monton wachsend,
fallend, wo konvex und wo konkav?
8.21 Überprüfe, ob folgende Integrale absolut konvergieren:
Z ∞
Z π
2
1
ln x
dx .
dx,
√3
2
1+x
0
0
x sin x
8.22 Man berechne (a > 0, b ∈ R, w = −a + ib):
Z ∞
ewt dt ,
0
sowie
Z
∞
ewt cos bt dt,
0
8.23 Man berechne das uneigentliche Integral
8.24 Man berechne
Z
1
−1
x
dx,
x6 + i
Z
0
R +∞
0
Z
∞
ewt sin bt dt .
0
(t2 + 2t) exp(wt) sin t dt mit w ∈ C, Re w < 0.
1
xm (log x)n dx, n, m ∈ N .
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
36
8.25 Sei α ≥ 0, und Iα sei definiert als
Iα =
Z
π
2
sinα x dx .
0
Man finde durch partielle Integration eine Relation zwischen Iα und Iα+2 . Man zeige mit
Hilfe dieser Rekursionsformel, dass für k ∈ N folgende zwei Formeln gelten:
I2k =
2k − 1 2k − 3
3 1 π
·
· ··· · · · ,
2k
2k − 2
4 2 2
I2k+1 =
8.26 Für x ∈ [0, π2 ] und k ∈ N zeige man
2k − 2
4 2
2k
·
· ··· · · .
2k + 1 2k − 1
5 3
sin2k+1 x ≤ sin2k x ≤ sin2k−1 x .
Daraus und aus dem vorherigen Beispiel leite man folgende Ungleichungen her:
1 · 3 · · · · · (2k − 1) · π 2 · 4 · · · · · (2k − 2)
2 · 4 · · · · · (2k)
≤
≤
.
3 · 5 · · · · · (2k + 1)
2 · 4 · · · · · (2k) · 2
3 · 5 · · · · · (2k − 1)
Nun forme man diese Ungleichung so um, sodass in der Mitte nur noch
leite daraus die Wallische Produktformel her:
π
2
steht, und man
π
1
22 · 42 · · · · · (2k)2
= lim 2 2
·
.
2 k→∞ 3 · 5 · · · · · (2k − 1)2 2k
Rn P R j
8.27 Sei f (x) auf [0, n] stetig differenzierbar. Man zeige durch eine Zerlegung von 0 in nj=1 j−1
P
unter Verwendung der partiellen Integration, dass sich die Differenz von nk=1 f (k) und
Rund
n
f (x)dx berechnen lässt durch
0
n
X
k=1
f (k) −
Z
n
f (x)dx =
0
Z
n
0
(x − [x]) f ′ (x)dx .
Außerdem zeige man:
n
X
f (k) =
k=0
Z
n
f (x)dx +
0
8.28 Man zeige, dass der Limes
f (0) + f (n)
+
2
Z
n
0
1
(x − [x] − ) f ′ (x)dx .
2
n
X 1
− ln n
γ := lim
n→∞
k
k=1
existiert. Die Zahl γ wird Euler-Mascharonische Konstante genannt; ihr ungefährer Wert ist
0, 577215....
8.29 Sei f (x) auf [0,
R nn] zweimal stetig differenzierbar. Man zeige, dass sich die Differenz von
Pn
k=1 f (k) und 0 f (x)dx berechnen lässt durch
n
X
k=1
wobei φ(x) =
f (k) −
(x−[x])2 −(x−[x])
.
2
Z
n
f (x)dx =
0
f (n) − f (0)
−
2
Z
n
φ(x) f ′′ (x)dx ,
0
8.9. ÜBUNGSBEISPIELE
37
8.30 Man wende voriges Beispiel auf f (x) = ln(x + 1) an, und zeige, dass das uneigentliche
Integral
Z
∞
a := −
φ(x) f ′′ (x)dx + 1
0
existiert. Man zeige weiters, dass
1
3
a = lim ln((n + 1)!) − (n + ) ln(n + 1) + n + 1 = lim ln(n!) − (n + ) ln n + n .
n→∞
n→∞
2
2
8.31 Man zeige, dass für den Grenzwert a aus dem vorherigen Beispiel
n!en
√
n→∞ nn n
√
gilt. Man setze b := ea , und zeige weiters, dass b = 2π.
Hinweis: Man zeige mit Hilfe des Wallischen Produkts
ea = lim
1
b2n
= √ ,
b2n
2π
lim
n→∞
wobei bn =
n
n!e√
.
nn n
Man verwende dabei auch die Tatsache, dass
2k
k
22k
1 · 3 . . . (2k − 1)
.
2 · 4 . . . (2k)
=
Anmerkung: Mit diesem Beispiel erhält man die Stirlingsche Formel
n!en
= 1.
√
2πn
√
Es gilt somit die asymptotische Gleichung n! nn e−n 2πn.
lim
n→∞
nn
8.32 Sei Q[a, b] die Menge alle stückweise stetigen, reellwertigen Funktionen auf [a, b]. Weiters
sei N die Menge aller f : [a, b] → R, sodass f (t) , 0 für nur endlich viele t.
Zeigen Sie, dass Q[a, b] (versehen mit punktweiser Addition und Multiplikation) ein Vektorraum über R
R xund N ein Unterraum davon ist. Weiters zeige man, dass (c, f +N) 7→ F, wobei
F(x) = c+ a f (t) dt eine wohldefinierte, lineare und bijektive Abbildung von R× Q[a, b]/N
auf
{F ∈ C[a, b] : F ist einmal differenzierbar auf [a, b] mit F ′ ∈ Q[a, b]} .
Bestimmen Sie auch die Umkehrfunktion dieser linearen Bijektion!
8.33 Geben Sie eine Riemann-integrierbare aber nicht stückweise stetige Funktion f an und
führen Sie aus, warum f diese Eigenschaft hat!
Hinweis: Betrachten Sie etwa f : [0, 1] → R mit f (t) = 1 auf [ 12 , 1], f (t) = 12 auf [ 14 , 21 ),
f (t) = 14 auf [ 81 , 14 ), usw. . Bauen Sie zu jedem ǫ > 0 eine Zerlegung von [0, 1], sodass die
Differenz von Ober- und Untersumme kleiner als ǫ wird.
8.34 Man berechne
lim
a→0
Z
1
0
8.35 Man berechne
1
dx .
1 + a sin2 (x)
Z
+∞
e−xt
dt .
1 + t2
0
RR
RR
Hinweis: Zeigen Sie zunächst, dass limx→0+ 0 .. = 0 limx→0+ .. für jedes feste reelle R ≥ 0.
R R e−xt
Dann definiere man H : [0, +∞)×(0, 1] → R mit H(R, x) := 0 1+t
2 dt, wobei [0, +∞) durch
≤ und (0, 1] durch ≥ gerichtet sind. Nun weise man nach, dass sich Lemma 8.7.1 anwenden
lässt.
lim
x→0+
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
38
8.36 Man betrachte die Funktionenfolge
N
X
S N (x) =
k=−N
1
.
x−k
für x ∈ R \ Z. Man zeige, dass S N (x) auf jedem kompakten Teilintervall [a, b] ⊆ R \ Z
gleichmäßig gegen eine Funktion h(x) konvergiert.
Man berechne h(k + 12 ) für k ∈ Z.
Schließlich zeige man h(x) = π cot(πx), x ∈ R \ Z, indem man ihre Ableitungen vergleicht.
Man verwende dazu Beispiel 6.28 und 6.29.
PN
1
. Begründung für Vertauschen von Limes und
Hinweis: Es gilt S N (x) = 1x + 2x k=1
x2 −k2
Differenzieren!
8.37 Durch Betrachtung der Ableitung leite man die Taylorreihe zur Funktion arctan mit Anschlussstelle x0 = 0 her.
Anmerkung: Zusammen mit dem Ableschen Grenzwertsatz, Satz 6.11.1, folgt
∞
X
(−1)k
π
= .
2k
+
1
4
k=0
8.38 Durch Betrachtung der Ableitung leite man die Taylorreihe zur Funktion areatanh mit Anschlussstelle x0 = 0 her.
8.39 Man berechne
Z
1
0
Z
2
1
Z
2
z
1
x+y
! !
dx dy dz ,
und begründe alle vorgenommenen Vertauschungen.
8.40 Für x ∈ (0, +∞) zeige man, dass folgendes uneigentliche Integral absolut konvergiert:
Z ∞
Γ(x) :=
e−t t x−1 dt.
0
Weiters zeige man, dass Γ(x) stetig von x abhängt.
Rn
Hinweis: Sei [a, b] ⊆ (0, +∞) fest. Man zeige, dass fn (x) := 1 e−t t x−1 dt eine Folge stetiger
n
Funktionen auf [a, b] ist, die auf [a, b] gleichmäßig gegen Γ(x) konvergiert. Dazu zeige
man, dass |e−t t x−1 | ≤ K1 ta−1 , t ∈ (0, 1] und |e−t t x−1 | ≤ K2 t12 , t ∈ [1, +∞) mit irgendwelche
Konstanten K1 , K2 .
Allgemeiner Tipp, wie man f (t) ≤ Cg(t) mit irgendeinem C > 0 für nicht negative stetige
Funktionen f, g auf einem Intervall [a, b) mit g(t) , 0 herleitet:
f (t)
f (t)
Gilt limt→b− g(t)
= 0, so gibt es insbesondere zu ǫ = 1 ein t0 ∈ [a, b), sodass t ≥ t0 ⇒ g(t)
≤ 1.
Da die Funktion
f (t)
g(t)
f (t)
g(t)
auf dem kompakten Intervall [a, t0 ] stetig ist, ist sie dort beschränkt, d.h.
≤ C für ein C > 0, das oBdA. auch C ≥ 1 erfüllt. Also gilt
8.41 Man zeige, dass für x > 0, n ∈ N:
f (t)
g(t)
≤ C auf ganz [a, b).
Γ(x + 1) = xΓ(x), Γ(n) = (n − 1)!.
8.42 Für x ∈ (0, +∞) zeige man, dass folgendes uneigentliche Integral absolut konvergiert:
Z ∞
gk (x) :=
e−t (ln t)k t x−1 dt.
0
Ry
Weiters zeige man, dass die gk stetig sind, dass 1 gk (t)dt = gk−1 (y) − gk−1 (1), und dass daher
gk die k-te Ableitung der Gammafunktion ist.
Hinweis:
Sei [a, b] ⊆ (0, +∞) beliebig. Man zeige, dass (α ∈ (1, +∞), x ∈ [a, b]) F(α, x) :=
Rα
−t
k x−1
dt gleichmäßig auf [a, b] konvergiert, wenn α → +∞. Dazu zeige man, dass
1 e (ln t) t
α
3
|e−t (ln t)k t x−1 | ≤ K1 t 4 a−1 , t ∈ (0, 1] und |e−t (ln t)k t x−1 | ≤ K2 t12 , t ∈ (1, +∞) mit irgendwelchen
Konstanten K1 , K2 .
8.9. ÜBUNGSBEISPIELE
39
8.43 Sei x nun nicht nur in (0, +∞), sondern allgemeiner in {z ∈ C : Re z > 0}. Man zeige, dass
dann Γ(x) ebenfalls konvergiert, und zwar in {z ∈ C : Re z > 0}, dass diese Funktion stetig
auf ganz {z ∈ C : Re z > 0} ist, und dass Γ(z + 1) = zΓ(z) gilt.
Schließlich stelle man Re Γ(z) und Im Γ(z) getrennt dar.
8.44 Man berechne Γ( 21 )!
40
KAPITEL 8. DAS RIEMANNSCHE INTEGRAL
Kapitel 9
Normen und Banachräume
9.1 Normierte Räume
In diesem Kapitel wollen wir eine spezielle Klasse von metrischen Räumen betrachten.
Diese Räume stellen eine Schnittstelle zwischen Linearer Algebra und Analysis dar.
9.1.1 Definition. Sei X ein Vektorraum über R (C). Eine Abbildung k.k : X → [0, ∞)
heißt Norm, falls
(i) kx + yk ≤ kxk + kyk, für alle x, y ∈ X Dreiecksungleichung.
(ii) kλxk = |λ| · kxk, für alle x ∈ X, λ ∈ R (∈ C).
(iii) kxk > 0 für alle x , 0.
Das Paar (X, k · k) heißt dann normierten Raum.
Ist X ein normierter Raum, so folgt unmittelbar aus den Eigenschaften einer Norm,
dass
d(x, y) := kx − yk, x, y ∈ X ,
(9.1)
eine Metrik auf X ist. Diese Metrik hat ganz spezielle Eigenschaften.
9.1.2 Lemma. Sei (X, k · k) ein normierter Raum, und seien (xn )n∈N , (yn )n∈N Folgen in
X, x, y ∈ X, und (λn )n∈N eine Folge bzw. λ ein Element im Skalarkörper von X, also in
R bzw. C. Ist xn → x, yn → y, λn → λ für n → ∞, so folgt
lim kxn k = kxk, lim xn + yn = x + y, lim λn xn = λx .
n→∞
n→∞
n→∞
Entsprechende Aussagen gelten auch für Netze.
Beweis. Den Beweis führt man genauso, wie für Folgen von Zahlen. Die erste Gleichung folgt aus Lemma 3.2.10 wegen kxn k = d(xn , 0) → d(x, 0) = kxk.
Wir zeigen nur noch die dritte Grenzwertbeziehung. Die zweite ist noch einfacher
zu verifizieren.
Zu ǫ > 0 mit oBdA. ǫ < 1 gibt es ein N ∈ N, sodass |λ − λn |, kxn − xk < ǫ für alle
n ≥ N. Es folgt kxn k ≤ kxn − xk + kxk < 1 + kxk und damit
kλn xn − λxk ≤ kλn xn − λxn k + kλxn − λxk =
|λn − λ|kxn k + |λ|kxn − xk ≤ (1 + kxk + |λ|)ǫ .
41
KAPITEL 9. NORMEN UND BANACHRÄUME
42
Wir sehen also, dass λn xn → λx.
❑
9.1.3 Korollar. Sei (X, k · k) ein normierter und hY, di ein metrischer Raum, und seien
f, g : D → X und λ : D → R (C) stetig, wobei D ⊆ Y. Dann sind auch λ f und f + g
stetige Funktionen von D nach X.
Beweis. Aus yn → y in hY, di folgt wegen der Stetigkeit f (yn ) → f (y) und g(yn ) → g(y)
in (X, k·k). Aus Lemma 9.1.2 folgt ( f +g)(yn ) = f (yn ) +g(yn) → f (y) +g(y) = ( f +g)(y)
und mit Proposition 6.1.4 die Stetigkeit von f + g. Entsprechend zeigt man die Stetigkeit von λ f .
❑
Für die folgende Definition sei daran erinnert, dass ein metrischer Raum vollständig
heißt, wenn jede Cauchy-Folge konvergiert; vgl. Definition 3.5.5.
9.1.4 Definition. Ist die von (X, k·k) erzeugte Metrik vollständig, so heißt der normierte
Raum Banachraum.
9.1.5 Beispiel.
(i) Klarerweise ist (R, |.|) ein Banachraum über R. (C, |.|) ist auch ein Banachraum,
wobei man ihn als Vektorraum über C und als Vektorraum über R betrachten
kann.
p
(ii) Das
qP Paradebeispiel eines normierten Raums über R ist (R , k.k2 ), wobei kxk2 :=
p
1
T
2
j=1 |x j | . Dabei ist x = (x1 , . . . , x p ) . Die erzeugte Metrik ist die wohlbekannte Euklidische Metrik:
v
u p
t
X
|x j − y j |2 .
d2 (x, y) = kx − yk2 =
j=1
Wegen Korollar 3.6.3 ist (R p , k.k2 ) sogar ein Banachraum.
(iii) Man kann auch den normierten Raum (C p , k.k2 ) über C mit kzk2 :=
betrachten, wobei z = (z1 , . . . , z p )T .
qP
p
j=1 |z j |
2
Identifiziert man dabei die j-te Komponente z j mit dem Paar (Re z j , Im z j ), so
sieht man leicht, dass sich C p mit R2p identifizieren lässt. Wegen
v
v
u
u
tX
tX
p
p
p
X
|z j |2 =
| Re z j |2 +
| Im z j |2 ,
j=1
j=1
j=1
bleiben dabei auch die Normen erhalten, und mit (R2p , k.k2 ) ist auch (C p , k.k2 ) ein
Banachraum.
(iv) Man kann R p auch mit den Normen
kxk1 :=
1 Ab
p
X
j=1
|x j |, kxk∞ := max |x j |
j=1,...,p
hier wollen wir die Elemente von R p als stehende Vektoren betrachten.
9.1. NORMIERTE RÄUME
43
versehen. Die dazugehörigen Metriken sind gerade die wohlbekannten Metriken
d1 und d∞ . Wegen Korollar 3.6.3 sind (R p , k.k1 ) und (R p , k.k∞ ) ebenfalls Banachräume.
Ehe wir uns mehr Beispiele normierter bzw. Banachräume anschauen, brauchen
wir ein kleines Lemma.
9.1.6 Lemma. Ist hX, di ein vollständiger metrischer Raum und ist Y eine abgeschlossene Teilmenge von X, so ist hY, d|Y×Y i auch ein vollständiger metrischer Raum.
Ist umgekehrt hY, d|Y×Y i vollständig, wobei Y Teilmenge eines metrischen Raumes
hX, di ist, so ist Y abgeschlossen in X.
Beweis. Klarerweise ist Y versehen mit der eingeschränkten Metrik selber ein metrischer Raum.
Ist (xn )n∈N eine Cauchy-Folge in Y, so konvergiert diese nach Voraussetzung gegen
ein x ∈ X. Ist nun Y abgeschlossen und enthält daher alle seine Häufungspunkte, so
folgt x ∈ Y.
Ist (xn )n∈N eine Folge in Y, die gegen ein x ∈ X konvergiert, so ist diese sicherlich
eine Cauchy-Folge bzgl. d und somit auch bzgl. d|Y×Y . Ist Y vollständig, so konvergiert
(xn )n∈N bzgl. d|Y×Y und somit auch bzgl. d gegen ein y ∈ Y. Da aber Grenzwerte
eindeutig sind, folgt x = y ∈ Y. Also ist Y abgeschlossen.
❑
Folgende Situation tritt bei der Betrachtung konkreter Räume auf. Ist (X, k · k) ein
normierter Raum und Y ein linearer Unterraum (Untervektorraum), so kann man k.k auf
Y einschränken und erhält offenbar wieder einen Normierten Raum. Ist dabei (X, k · k)
ein Banachraum und ist Y als Teilmenge von X abgeschlossen, so muss nach Lemma
9.1.6 auch (Y, k · k) ein Banachraum sein.
9.1.7 Lemma. Ist (X, k · k) ein normierter Raum und Y ein linearer Unterraum, so ist
der Abschluss c(Y) von Y in X ebenfalls ein linearer Unterraum und somit der kleinste
abgeschlossene Teilraum von X, der Y enthält.
Beweis. Sind x, y ∈ c(Y) und λ, µ ∈ R (C), so gibt es Folgen xn , yn ∈ Y mit
limn→∞ xn = x und limn→∞ yn = y. Wir wissen, dass dann die Folge λxn + µyn ∈ Y
gegen λx + µy konvergiert und somit diese Linearkombination auch in c(Y) liegt.
❑
9.1.8 Beispiel. Wir wollen uns nun weitere Beispiele von normierten Räumen ansehen.
(i) Ist E eine nichtleere Menge und (Y, k.kY ) ein normierter Raum. Wir betrachten den
Raum B(E, Y) aller beschränkten Abbildungen von E nach Y. Diesen Raum haben wir schon im ersten Semester betrachtet, wobei aber Y allgemeiner ein metrischer Raum war; vgl. Definition 6.6.3. In unserem Fall ist mit Y auch B(E, Y) ein
Vektorraum über dem selben Skalarkörper, wie Y, wobei die Operationen punktweise definiert sind.
Setzen wir für f ∈ B(E, Y)
k f k∞ := sup{k f (x)kY : x ∈ E} ,
so prüft man leicht nach, dass k f k∞ eine Norm auf B(E, Y) ist. Die von dieser
Norm erzeugte Metrik ist genau die in Definition 6.6.3 eingeführte Metrik
k f − gk∞ = d∞ ( f, g) = sup k f (x) − g(x)kY .
x∈E
44
KAPITEL 9. NORMEN UND BANACHRÄUME
Im Falle, dass (Y, k.kY ) ein Banachraum ist, folgt aus Satz 6.6.15, dass
(B(E, Y), d∞) vollständig und damit (B(E, Y), k.k∞) auch ein Banachraum ist.
Für Y = R oder Y = C versehen mit |.| haben wir k.k∞ schon in Definition 6.7.1
kennen gelernt.
(ii) Ist E = N und Y = R oder Y = C, so ist B(E, Y) die Menge aller beschränkten
reellen bzw. komplexen Folgen, die man auch als l∞ bzw. l∞ (N) bezeichnet. Diese
sind Banachräume, da R und C vollständig sind.
(iii) Bezeichne c0 bzw. c0 (N) den Raum aller reellwertigen bzw. komplexwertigen
Nullfolgen. Offenbar ist c0 ein linearer Teilraum von l∞ . Mit Hilfe von Lemma
8.7.1 kann man sogar zeigen, dass c0 als Teilraum von l∞ abgeschlossen ist. Also
ist auch (c0 , k.k∞ ) ein Banachraum.
(iv) Mit der Notation aus (i) setzen wir noch zusätzlich voraus, dass E ⊆ X, wobei
hX, di ein metrischer Raum ist, und dass (Y, k.kY ) ein Banachraum ist.
Dann kann man die Menge Cb (E, Y) aller f ∈ B(E, Y) betrachten, die stetig
sind. Diese Menge stellt einen linearen Unterraum von B(E, Y) dar; siehe Korollar 9.1.3. Somit ist auch (Cb (E, Y), k.k∞ ) ein normierter Raum. Man beachte,
dass für kompaktes E alle stetigen Funktionen auf E automatisch beschränkt sind,
womit in diesem Fall Cb (E, Y) = C(E, Y).
Ist nun ( fn )n∈N eine Folge von Funktionen aus Cb (E, Y), die bzgl. d∞ gegen ein
f ∈ B(E, Y) konvergiert, so wissen wir aus Korollar 6.6.13, dass auch f stetig ist,
also f ∈ Cb (E, Y). Somit ist Cb (E, Y) sogar eine abgeschlossene Teilmenge von
B(E, Y).
Daher ist neben B(E, Y) auch Cb (E, Y) ein Banachraum, wenn nur (Y, k.kY ) ein
solcher ist.
(v) Ist Y = R oder Y = C, so schreiben wir für den Banachraum Cb (E, Y) auch Cb (E).
Ist E etwa [a, b] ⊆ R, so schreiben wir Cb [a, b] oder auch C[a, b] dafür, da [a, b]
ja kompakt ist.
Auf dem Raum C[a, b] können wir auch andere Normen betrachten wie beispielsweise
Z b
| f (t)| dt .
(9.2)
k f k1 :=
a
Diese Norm unterscheidet sich von k.k∞ wesentlich, denn es gibt bzgl. k.k1
Cauchy-Folgen, die bzgl. k.k∞ keine sind. Daraus kann man herleiten, dass
bezüglich k.k1 der Raum C[a, b] kein Banachraum ist.
(vi) Sind (X, k.kX ) und (Y, k.kY ) zwei normierte Räume über dem selben Körper R oder
C, so auch (X × Y, k.kmax ), wobei
k(x, y)kmax = max{kxkX , kykY } .
In der Tat ist X × Y ein Vektorraum, und die Axiome, die für eine Norm erfüllt
sein müssen, lassen sich auch leicht nachweisen. Die von k.kmax erzeugte Metrik
ist genau jene aus (8.18), wenn man dort dX (a, x) = kx−akX und dX (b, y) = ky−bkY
setzt.
9.2. LINEARE ABBILDUNGEN
45
Wie schon in Fakta 8.7.8 festgestellt ist eine Folge (xn , yn ) n∈N in X × Y konvergent gegen (x, y) genau dann, wenn (xn )n∈N gegen x und (yn )n∈N gegen y konver
giert. Man sieht auch sofort, dass (xn , yn ) n∈N genau dann eine eine Cauchy-Folge
ist, wenn (xn )n∈N und (yn )n∈N beide Cauchy-Folgen sind.
Somit erhält man auch, dass (X × Y, k.kmax ) ein Banachraum ist, wenn X und Y
beide Banachräume sind.
(vii) Ist im vorherigen Beispiel X = Y, so folgt aus Lemma 9.1.2, dass die Abbildung
+ : X × X → X stetig ist.
9.2 Lineare Abbildungen
9.2.1 Definition. Zwei Normen k.k1 und k.k2 auf einem linearen Raum X heißen äquivalent, falls es Konstanten α > 0, β > 0 gibt sodass
αkxk1 ≤ kxk2 ≤ βkxk1 für alle x ∈ X .
9.2.2 Bemerkung. Man überzeugt sich auch sofort davon, dass die Relation, äquivalent zu sein, auf der Menge aller Normen auf einem gegebenen Vektorraum X eine
Äquivalenzrelation ist.
Betrachtet man die jeweiligen Definitionen, so sieht man auch, dass äquivalente
Normen die gleichen konvergenten Folgen, die gleichen Cauchy-Folgen, die gleichen
abgeschlossenen bzw. offenen Mengen, etc. haben.
9.2.3 Beispiel.
(i) Sei X = R p . Die Normen k.k∞ , k.k2 und k.k1 sind äquivalent, denn für
(x1 , . . . , x p )T ∈ X = R p gilt
max |xi | ≤ (
i=1,...,p
p
X
i=1
2
1
2
|xi | ) ≤
p
X
i=1
|xi | ≤ p · max |xi | .
i=1,...,p
Man kann zeigen, dass auf R p alle Normen äquivalent sind. Insbesondere ist R p
mit jeder Norm vollständig.
(ii) Betrachte auf X = C[0, 1] neben der Supremumsnorm k.k∞ noch die Norm aus
(9.2). Diese beiden Normen sind nicht äquivalent. Es gilt zwar k f k1 ≤ k f k∞ , aber
es gibt kein β > 0, sodass k f k∞ ≤ βk f k1 gleichzeitig für alle f ∈ C[0, 1]. Um das
einzusehen, betrachte
(
1 − n t , t ∈ [0, n1 ],
.
fn (t) =
0
, t ∈ [ n1 , 1]
Dabei ist k fn k∞ = 1, aber k fn k1 ≤
1
2n .
Thematisch verwandt mit der Äquivalenz von Normen ist der Begriff der Beschränktheit einer linearen Abbildung. Man beachte dabei, dass die Definition der Beschränktheit einer linearen Abbildung nicht mit der Definition der Beschränktheit einer
Funktion aus Definition 3.2.11 übereinstimmt.
KAPITEL 9. NORMEN UND BANACHRÄUME
46
9.2.4 Definition. Seien (X, k.kX ) und (Y, k.kY ) zwei normierte Räume über demselben
Skalarkörper R oder C. Für eine lineare Abbildung A : X → Y sei
(
)
kAxkY
kAk := sup
: x ∈ X \ {0}
(9.3)
kxkX
in dem Sinne, dass kAk = +∞, falls obige Menge nach oben unbeschränkt ist; vgl.
Definition 2.2.4. Wir nennen A beschränkt , falls kAk < +∞, dh. falls es ein C ≥ 0 gibt,
sodass
kAxkY
C≥
, für alle x ∈ X \ {0} .
(9.4)
kxkX
Ist A beschränkt, so bezeichnet man das dabei endliche kAk als die Abbildungsnorm
von A.
9.2.5 Bemerkung. (9.4) ist äquivalent zu
kAxkY ≤ CkxkX , für alle x ∈ X ,
(9.5)
da für x = 0 diese Ungleichung immer gilt. Also ist die Menge aller C ≥ 0, für die
(9.5) zutrifft, genau die Menge aller oberen Schranken von
(
)
kAxkY
: x ∈ X \ {0} .
kxkX
Somit ist A genau dann beschränkt, wenn es es ein C ≥ 0 gibt, sodass (9.5) zutrifft, und
kAk ist dann eben das kleinste derartige C ≥ 0. Wegen
) (
!
)
(
1
kAxkY
: x ∈ X \ {0} = kA
x kY : x ∈ X \ {0} =
kxkX
kxkX
{kAxkY : x ∈ X, kxkX = 1} ⊆ {kAxkY : x ∈ X, kxkX ≤ 1}
und wegen kAxkY ≤ kA kxk1 X x kY für jedes x ∈ X mit 0 < kxk < 1 gilt auch
kAk = sup{kAxkY : x ∈ X, kxkX = 1} = sup{kAxkY : x ∈ X, kxkX ≤ 1} .
Aus obiger Definition erkennt man unmittelbar, dass zwei Normen k.k1 und k.k2 auf
einem Vektorraum genau dann äquivalent sind, wenn idX sowohl als Abbildung von
(X, k.k1 ) nach (X, k.k2 ) als auch als Abbildung von (X, k.k2 ) nach (X, k.k1 ) beschränkt ist.
9.2.6 Satz. Eine lineare Abbildung A : X → Y ist genau dann stetig, wenn sie beschränkt ist. Ist das der Fall, so ist sie sogar gleichmäßig stetig.
Beweis. Im Fall A = 0 ist A offenbar beschränkt und trivialerweise gleichmäßig stetig.
Gelte also A , 0.
ǫ
, so folgt
Sei A beschränkt. Ist ǫ > 0 und gilt kx − yk ≤ kAk
kAx − Ayk = kA(x − y)k ≤ kAk · kx − yk ≤ ǫ .
Also ist A gleichmäßig stetig und daher insbesondere stetig.
Ist umgekehrt A stetig, so gibt es wegen der Stetigkeit insbesondere bei x = 0
ein δ > 0 zu ǫ = 1, sodass
kxk ≤ δ die Ungleichung
kAxk ≤ 1 impliziert. Für jedes
δ δ x ∈ X \ {0} folgt kxk x ≤ δ und somit A( kxk x) ≤ 1 bzw. kAxk ≤ 1δ · kxk. Für x = 0
gilt diese Ungleichung trivialerweise auch.
❑
9.2. LINEARE ABBILDUNGEN
47
9.2.7 Satz. Sind (X, k.kX ) und (Y, k.kY ) zwei normierte Räume beide zugleich über R
oder C, so ist die Menge L(X, Y) aller beschränkten linearen Abbildungen von X nach
Y versehen mit der Abbildungsnorm k.k selber ein normierter Raum.
Ist (Y, k.kY ) ein Banachraum, so auch (L(X, Y), k.k).
Beweis. Für A, B ∈ L(X, Y) und für ein beliebiges x ∈ X gilt
k(A+ B)xkY = kAx + BxkY ≤ kAxkY + kBxkY ≤ kAk kxkX +kBk kxkX = (kAk+kBk)kxkX .
Gemäß Bemerkung 9.2.5 ist dann die lineare Abbildung A + B beschränkt. Da kA + Bk
das kleinste C ≥ 0 ist, sodass k(A + B)xkY ≤ C kxkX für alle x ∈ X, folgt aus dieser
Rechnung auch kA + Bk ≤ kAk + kBk. Für A ∈ L(X, Y) und λ ∈ R (C) ist
{ kλAxkY : x ∈ X, kxkX ≤ 1 } = |λ| · { kAxkY : x ∈ X, kxkX ≤ 1 }
nach oben beschränkt, und ihr Supremum ist genau |λ| · k Ak. Somit ist das lineare λA
beschränkt mit kλAk = |λ| · k Ak.
Dass A , 0 die Ungleichung kAk > 0 nach sich zieht, folgt sofort aus (9.3). Wir
haben somit nachgewiesen, dass (L(X, Y), k.k) ein normierter Raum ist.
Um die Vollständigkeit zu zeigen, könnten wir direkt vorgehen. Wir werden uns
aber der schon bekannten Tatsache bedienen, dass Cb (E, Y) versehen mit k f k∞ =
supt∈E k f (t)kY ein Banachraum ist, wenn E Teilmenge eines metrischen Raumes ist;
vgl. Beispiel 9.1.8.
Dazu setze E = {x ∈ X : kxk ≤ 1}. Für A ∈ L(X, Y) ist A|E sicherlich eine stetige
und beschränkte Funktion, wobei
kA|E k∞ = sup{ kAxkY : kxkX ≤ 1 } = kAk .
Also ist A 7→ A|E eine isometrische und daher injektive Abbildung von L(X, Y) in
Cb (E, Y). Diese Abbildung ist offenbar auch linear. Das Bild dieser Einbettung ist genau die Menge L aller f ∈ Cb (E, Y), sodass
x ∈ E, λ ∈ R (C), λx ∈ E ⇒ f (λx) = λ f (x) ,
und
x, y, x + y ∈ E ⇒ f (x + y) = f (x) + f (y) .
In der Tat sieht man mit einem solchen f leicht, dass die Abbildung A : X → Y
definiert durch A(0) = 0 und A(x) := kxkX f ( kxk1 X x) für x , 0 die eindeutige beschränkte
und lineare Abbildung ist, sodass A|E = f gilt.
Die Menge L ⊆ Cb (E, Y) ist abgeschlossen, denn aus fn → f mit fn ∈ L und
f ∈ Cb (E, Y) folgt f (x + y) = lim fn (x + y) = lim fn (x) + lim fn (y) = f (x) + f (y), falls
x, y, x + y ∈ E und genauso f (λx) = λ f (x), falls x, λx ∈ E und somit f ∈ L. Wegen
Lemma 9.1.6 ist (L, k.k∞ ), und daher auch (L(X, Y), k.k), ein Banachraum.
❑
Ähnlich wie im vorhergehenden Beweis erkennt man auch, dass für A ∈ L(X, Y)
und B ∈ L(Y, Z)
kBAk = sup{ kBAxkZ : x ∈ X, kxkX ≤ 1 } ≤
sup{ kBk · kAxkY : x ∈ X, kxkX ≤ 1 } = kBk · kAk .
Für die Räume L(X, Y) gilt in Analogie zu Lemma 9.1.2 folgendes Resultat.
(9.6)
KAPITEL 9. NORMEN UND BANACHRÄUME
48
9.2.8 Lemma. Seien X, Y, Z normierte Räume, und seien (An )n∈N , (Bn )n∈N , (xn )n∈N Folgen in L(X, Y), L(Y, Z) bzw. X. Weiters seien A ∈ L(X, Y), B ∈ L(Y, Z) und x ∈ X. Gilt
An → A, Bn → B und xn → x für n → ∞, so folgt
lim Bn An = BA und lim An xn = Ax ,
n→∞
n→∞
wobei die erste Folge in L(X, Z) bzgl. der Abbildungsnorm und die zweite in Y bzgl.
der Norm auf Y konvergiert. Entsprechende Aussagen gelten auch für Netze.
Beweis. Wir zeigen die erste Grenzwerteigenschaft. Zu ǫ > 0 mit oBdA. ǫ < 1 gibt es
ein N ∈ N, sodass kAn −Ak, kBn −Bk < ǫ für alle n ≥ N. Es folgt kAn k ≤ kAn −Ak+kAk <
1 + kAk und damit
kBn An − BAk ≤ kBn An − BAn k + kBAn − BAk =
kBn − Bk kAn k + kBk kAn − Ak ≤ (1 + kAk + kBk)ǫ .
Wir sehen also, dass Bn An → BA.
❑
Genauso wie in Korollar 9.1.3 folgt daraus
9.2.9 Korollar. Seien X, Y, Z normierte Räume und hM, di ein metrischer Raum und
D ⊆ M. Sind f : D → L(X, Y), g : D → L(Y, Z) und h : D → X stetig, so auch
g f : D → L(X, Z) und f h : D → Y. Dabei sind diese Funktionen definiert durch 2
(g f )(t) := g(t) f (t) sowie 3 ( f h)(t) := f (t)h(t).
9.2.10 Beispiel.
(i) Sei Y ein normierter Raum über R und y0 ∈ Y. Dann ist die Abbildung λ → λy0
von R nach Y linear und beschränkt durch ky0 k. Entsprechendes gilt für C.
(ii) Sei T : R p → Y linear, wobei Y ein normierter Raum ist. Ist R p mit k.k∞ oder
mit einer zu ihr äquivalenten Norm versehen, so ist T beschränkt und somit steP
tig. Denn ist x = (x1 , . . . , x p )T = pj=1 x j e j ∈ R p , wobei e j der j-te kanonische
p
Basisvektor in R ist, so folgt
kT (x)k = k
p
X
j=1
x j T (e j )k ≤
p
X
j=1
|x j | · kT (e j )k ≤ kxk∞
p
X
j=1
kT (e j )k .
(iii) Sei X = R p und Y = Rq , beide versehen mit k.k∞ . Wegen des vorherigen Beispiels
ist jede lineare Abbildung A : R p → Rq beschränkt. Also lässt sich L(R p , Rq ) als
Vektorraum mit Rq×p identifizieren.
(iv) Versieht man X = R p mit k.k∞ und auch Y = Rq mit k.k∞ , so hat man mit der
Abbildungsnorm k.k auf Rq×p R pq eine weitere Norm. Auch diese ist zu k.k∞
äquivalent. In der Tat ist für A = (ai j ) ∈ Rq×p und x ∈ R p
kAxk∞ = max |
i=1,...,q
p
X
j=1
ai j x j | ≤
2 Hintereinanderausführung von zuerst f (t) und dann g(t). Im Falle X = R p , Y = Rq , Z = Rr entspricht
das der Multiplikation der Matrizen g(t) und f (t).
3 Anwenden von f (t) auf h(t). Im Falle X = R p , Y = Rq entspricht das der Multiplikation der Matrix f (t)
mit dem Vektor h(t).
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
max p max |ai j | · kxk∞ = p
i=1,...,q
j=1,...,p
max
i=1,...,q; j=1,...,p
49
|ai j | · kxk∞ .
Also kAk ≤ pkAk∞ . Bezeichnet {e j } j=1,...,p die kanonische Basis von R p , so ist
sicherlich auch ( j = 1, . . . , p)
kAk ≥ kAe j k∞ = max |ai j | ,
i=1,...,q
und daher kAk ≥ kAk∞ .
Allgemeiner kann man X = R p und Y = Rq jeweils mit einer der Normen
k.k1 , k.k2 , k.k∞ versehen, wobei die Norm auf R p nicht dieselbe wie auf Rq sein
muss. Die daraus resultierenden Abbildungsnormen sind verschieden. Ähnlich
wie oben zeigt man aber, dass sie alle zu k.k∞ auf Rq×p R pq und somit auch
untereinander äquivalent sind.
(v) Sei X = Y = R2 mit k.k2 versehen und A ∈ R2×2 von der speziellen Form
A = ab −b
mit festen a, b ∈ R. Um die Abbildungsnorm von A zu berechnen,
a
bemerken wir, dass der erste und zweite Eintrag von
! !
!
a −b x
xa − yb
=
b a y
xb + ya
genau Real- bzw. Imaginärteil von (a + ib) · (x + iy) ist. Wegen k dc k2 = |c + id|
x
gilt kA y k2 = |(a + ib) · (x + iy)| = |a + ib| · |x + iy| = |a + ib| · k yx k2 . Daraus
folgt unmittelbar, dass kAk = |a + ib| = k ab k2 .
(vi) Sei X = Y = C[0, 1], und A : X → Y definiert durch
Z x
A( f )(x) :=
f (t) dt .
0
Man sieht sofort, dass A linear ist. Außerdem ist mit f ∈ C[0, 1]
kA( f )k∞ = sup |A( f )(x)| ≤ sup (x sup | f (t)|) ≤ k f k∞ .
x∈[0,1]
x∈[0,1]
t∈[0,x]
Also kAk ≤ 1.
9.3 Banachraumwertige Reihen, Funktionen, etc.
Zunächst verallgemeinern wir den Begriff von Zahlenreihen auf Reihen mit Summanden, die in einem normierten Raum liegen. Die Definition ist genau die gleiche.
9.3.1 Definition. Ist (an )n∈N eine Folge in einem normierten Raum (X, k.k), so heißt die
P
Reihe ∞
n=1 an konvergent, falls die Folge (S N )N∈N der Partialsummen
S N :=
N
X
an
n=1
in X, d.h. bzgl. der von k.k erzeugten Metrik, konvergiert.
P
P∞
Die Reihe ∞
n=1 an heißt absolut konvergent, falls
n=1 kan k in R konvergiert, dh.
P∞
falls n=1 kan k < +∞, vgl. Definition 3.9.12.
KAPITEL 9. NORMEN UND BANACHRÄUME
50
9.3.2 Fakta. Nicht nur die Definition lässt sich unmittelbar auf Reihen mit Werten
in normierten Räumen übertragen, sondern auch viele der im ersten Semester hergeleiteten Ergebnisse. Im Folgenden seien (X, k.k) und (Y, k.k) normierte Räume. Für die
Beweise der Verallgemeinerungen muss man in allen Fällen nur an geeigneten Stellen
|.| durch k.k ersetzen:
1. Rechenregeln (siehe Korollar 3.9.3):
∞
X
λan = λ
n=1
∞
X
an , und
n=1
∞
X
(an + bn ) =
n=1
∞
X
an +
n=1
∞
X
bn ,
n=1
wobei λ ∈ R bzw. λ ∈ C je nachdem, was der Skalarkörper von X ist, und
P
P∞
wobei ∞
n=1 an und
n=1 bn beide als konvergent vorausgesetzt sind. Die zweite
Rechenregel etwa folgt mit Lemma 9.1.2 aus
N
N
N
N
N
X
X
X
X
X
bn .
an + lim
bn = lim
(an + bn ) = lim an +
lim
N→∞
N→∞
n=1
n=1
N→∞
n=1
N→∞
n=1
2. Ist T : X → Y linear und stetig, so folgt für eine konvergente Reihe
T(
∞
X
n=1
an ) = T ( lim
N→∞
N
X
an ) = lim T (
N→∞
n=1
N
X
n=1
an ) =
∞
X
n=1
P∞
T (an ) ,
n=1
an
(9.7)
n=1
wobei die Reihe rechts automatisch konvergiert.
Da für ein festes a ∈ X die Abbildung λ 7→ λa von R bzw. C nach X linear und
beschränkt ist, gilt insbesondere für jede konvergente R- bzw. C-wertige Reihe
P∞
P
auch ∞
n=1 αn , dass
n=1 (αn a) in X konvergiert, wobei der Grenzwert letzterer
P∞
Reihe mit ( n=1 αn )a übereinstimmt.
3. Manipulationsregeln wie in Fakta 3.9.4, (1) und (2), d.h. man darf endlich viele
Summanden umändern, ohne das Konvergenzverhalten zu ändern. Der Grenzwert ändert sich im Allgemeinen. Außerdem kann man in einer Reihe Klammern
setzen.
P
4. Ist ∞
n=1 an konvergent, so folgt
n
n−1 ∞ ∞
X X
X X
lim an = lim a j − a j = an − an = 0
n→∞
n→∞
j=1
j=1
n=1
n=1
in X; vgl. Proposition 3.9.7.
Die Resultate für reell- bzw. komplexwertige Reihen, die die Vollständigkeit von
R (C) verwenden, lassen sich auf vollständige normierte Räume, d.h. Banachräume
verallgemeinern. Ist also (X, k.k) ein Banachraum, dann gelten folgende Verallgemeinerungen.
5. Setzt man in die Definition von Cauchy-Folge die Folge der Partialsummen ein,
so erhält man analog zu Lemma 3.9.11 das Cauchysche Konvergenzkriterium:
P∞
n=1 an konvergiert genau dann, wenn
m
X
∀ǫ > 0 ∃N ∈ N : a j < ǫ, ∀m > n ≥ N .
j=n+1 9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
51
P
6. Ist eine Reihe ∞
Konn=1 an absolut konvergent, so folgt aus dem Cauchyschen
P
vergenzkriterium und der Dreiecksungleichung sofort, dass ∞
a
auch
konn=1 n
vergiert, wobei wegen der Stetigkeit von k.k : X → R
∞
N
∞
X
X
X
an = lim an ≤
kan k .
n=1 N→∞ n=1 n=1
7. Majorantenkriterium (siehe Lemma 3.9.8): Ist kan k ≤ αn ∈ R+ ∪ {0} und konverP
P∞
giert ∞
n=1 αn , so konvergiert n=1 an absolut, wobei
∞
∞
∞
X
X
X
an ≤
kan k ≤
αn .
(9.8)
n=1 n=1
n=1
8. Quotienten- und Wurzelkriterium wie in Satz 3.10.3.
√
In der Tat folgt√aus n kan k ≤ q, n ≥ N, für ein q ∈ [0, 1) und ein N ∈ N – das ist
P
n
zu lim supn→∞ kan k < 1 äquivalent, dass kan k ≤ qn , n ≥ N. Also hat ∞
n=N kan k
P∞
eine konvergente Majorante, und in Folge konvergiert auch n=1 kan k.
p
Ist dagegen n(k) kan(k) k ≥ 1, k ∈ N für eine Teilfolge, so kann (an )n∈N keine
P
Nullfolge sein, und somit ∞
n=1 an nicht konvergieren.
k
≤ q, n ≥ N, für ein q ∈ [0, 1) und ein N ∈ N – das ist zu
Aus an , 0, kakan+1
nk
kan+1 k
lim supn→∞ kan k < 1 äquivalent – folgt kan k ≤ qn−N kaN k für n ≥ N und somit
√
lim supn→∞ n kan k < 1.
k
Ist dagegen an , 0, kakan+1
≥ 1, n ≥ N, für ein N ∈ N, so kann (an )n∈N wegen 0 <
nk
P
kaN k ≤ kaN+1 k ≤ . . . keine Nullfolge sein, und somit ∞
n=1 an nicht konvergieren.
Genauso wie im R-wertige bzw. C-wertigen Fall definieren wir auch hier Summen über beliebige Indexmengen; vgl. Definition 5.4.2. Für eine Menge M bezeichne
wieder E = E(M) die Menge aller endlichen Teilmengen. Versehen mit ⊆ wird diese
Menge zu einer gerichteten Menge.
9.3.3 Definition. Sei (X, k.k) ein normierter Raum, M , ∅ eine Menge und a j ∈ X für
P
jedes j ∈ M. Falls das Netz ( j∈A a j )A∈E in X bzgl. k.k konvergiert, so sagen wir, dass
P
4
j∈M a j unbedingt konvergiert und setzen
X
X
aj .
a j = lim
j∈M
A∈E
j∈A
Da Grenzwerte mit dem Addieren und dem skalaren Multiplizieren verträglich
sind, gilt wie im skalaren Fall, dass (λ, µ ∈ R (C))
X
X
X
(λa j + µb j ) = λ a j + µ b j
j∈M
j∈M
j∈M
in dem Sinn, dass die linke Seite unbedingt konvergiert, wenn es die rechte tut.
9.3.4 Fakta. Für einen Banachraum (X, k.k) gelten folgende Aussagen, die wie Fakta
5.4.3, Korollar 5.4.5, Proposition 5.4.8 und Lemma 5.4.9 zu verifizieren sind.
4 Die
Summe über die leere Indexmenge sei dabei per definitionem Null.
KAPITEL 9. NORMEN UND BANACHRÄUME
52
1. Die Summe
P
j∈M
ka j k konvergiert unbedingt genau dann, wenn
X
j∈A
ka j k ≤ C für alle A ∈ E ,
P
für ein C > 0. In dem Fall konvergiert auch j∈M a j unbedingt.
P
P
2. Konvergiert j∈M a j unbedingt, so auch j∈P a j für jede nichtleere Teilmenge
P ⊆ M.
3. Ist M̃ eine weitere Menge – es kann auch M̃ = M sein – und σ : M̃ → M eine
P
P
Bijektion, so konvergiert j∈M a j genau dann unbedingt, wenn j∈ M̃ aσ( j) es tut.
P
4. Im Falle M = N folgt aus der unbedingten Konvergenz von j∈N a j die KonverP∞
genz von n=1 an im Sinne von Definition 9.3.1 gegen den gleichen Grenzwert.
P
P
5. Wenn ∞
konvergiert, dh. ∞
n=1 an absolut
n=1 kan k < +∞, so konvergieren
P
P
ka
k
sowie
a
unbedingt.
j
j∈N
j∈N j
6. Im Allgemeinen gilt das Banachraumwertige Analogon von Satz 5.4.4 nicht; insP
besondere zieht die unbedingte Konvergenz von j∈N a j nicht notwendigerweise
P
die unbedingte Konvergenz von j∈N ka j k nach sich.
P
7. Falls die Reihe ∞
k=1 bk mit Summanden in X absolut konvergiert, so tut das auch
P∞
b
für
jede
Bijektion σ : N → N mit dem selben Grenzwert in X.
σ(k)
k=1
Ṡ
8. Zerlegt man M als M = i∈I Mi mit nichtleerer Indexmenge I und nichtleeren
P
Mengen Mi , i ∈ I, so folgt aus der unbedingten Konvergenz von j∈M a j auch
P P
die von i∈I j∈Mi a j , wobei
XX
aj =
i∈I j∈Mi
X
aj .
(9.9)
j∈M
Siehe Proposition 5.4.8.
P P
P
9. Konvergiert
unbedingt, dh. alle
sowie
i∈I
j∈Mi ka j k
j∈Mi ka j k
P P
P
konvergieren unbedingt, so konvergiert auch
i∈I Pj∈Mi ka j k
j∈M ka j k
sowie j∈M a j unbedingt, wobei wieder (9.9) gilt; vgl. Lemma 5.4.9.
9.3.5 Beispiel. Sei B ∈ R p×p (versehen z.B. mit der Abbildungsnorm) mit kBk < 1, und
definiere5 (B0 = I)
∞
X
S :=
Bn .
n=0
P
n
Wegen (9.6) hat man kBn k ≤ kBkn , und daher ist ∞
n=0 kBk eine konvergente Majorante,
P∞ n
und somit konvergiert S = n=0 B absolut, wobei mit (9.8)
kS k ≤
5 Man
∞
X
n=0
kBn k ≤
spricht von der von Neumannschen Reihe.
∞
X
n=0
kBkn =
1
.
1 − kBk
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
53
Die Tatsache, dass C 7→ BC eine beschränkte lineare Abbildung von R p×p nach R p×p
ist, erlaubt die Anwendung von (9.7), dh.
BS = B lim
N→∞
N
X
n=0
Bn = lim
N→∞
N
X
n=0
Bn+1 = lim (−I +
N→∞
N+1
X
n=0
Bn ) = −I + S .
Also I = (I − B)S . Genauso sieht man I = S (I − B). Also ist I − B invertierbar mit
S = (I − B)−1 .
9.3.6 Korollar. Ist T ∈ R p×p invertierbar, und ist S ∈ R p×p mit kT − S k < kT1−1 k , so ist
auch S invertierbar.
Insbesondere ist die Menge GL(p, R) aller invertierbaren p×p-Matrizen eine offene
Menge, und die Funktion S 7→ S −1 ist stetig auf GL(p, R) ⊆ R p×p .
Beweis. Nach Voraussetzung ist k(T − S )T −1 k < 1. Gemäß Beispiel 9.3.5 existiert
(I − (T − S )T −1 )−1 und
S T −1 (I − (T − S )T −1 )−1 = (T − (T − S ))T −1 (I − (T − S )T −1 )−1 =
(I − (T − S )T −1 )(I − (T − S )T −1 )−1 = I .
Also hat S eine Rechtsinverse. Entsprechend ist (I − T −1 (T − S ))−1 T −1 eine Linksinverse. Aus der Linearen Algebra ist bekannt, dass diese dann übereinstimmen müssen.
Um die Stetigkeit von S 7→ S −1 einzusehen, sei S n → S , wobei alle Matrizen
invertierbar sind. Es folgt
kS n−1 − S −1 k = kS n−1 (S − S n )S −1 k ≤ kS n−1 k · kS − S n k · kS −1 k
(9.10)
und daher kS n−1 k ≤ kS −1 k + kS n−1 − S −1 k ≤ kS −1 k + kS −1 k · kS n−1 k · kS − S n k. Für
hinreichend großes n hat man somit
kS n−1 k ≤
kS −1 k
.
1 + kS −1 k · kS − S n k
Also ist kS n−1 k beschränkt, und aus (9.10) folgt S n−1 → S −1 .
❑
9.3.7 Bemerkung. Im vorangegangenen Beispiel 9.3.5 und Korollar 9.3.6 haben wir
zwar von quadratischen Matrizen gesprochen. Es gilt aber der selbe Sachverhalt, wenn
die auftretenden Objekte allgemeiner beschränkte lineare Abbildungen eines Banachraumes X in sich – also Elemente von L(X, X) sind. Die Beweise sind so gewählt, dass
sie auch in diesem allgemeineren Fall funktionieren.
Man kann auch Funktionen mit Werten in normierten Räumen betrachten. Dabei
heißt eine Folge ( fn )n∈N von beschränkten Funktionen fn : E → X gleichmäßig konvergent gegen f , falls limn→∞ fn = f in dem normierten Raum B(E, X)6.
9.3.8 Fakta. Ist (X, k.k) sogar ein Banachraum, so gelten folgend Aussagen, die für
X = R (C) schon bekannt sind.
6 Dieses
ist.
Konzept ist schon aus Definition 6.6.5 bekannt, wenn sogar X allgemeiner ein metrischer Raum
KAPITEL 9. NORMEN UND BANACHRÄUME
54
1. Mit (X, k.k) ist auch B(E, X) ein Banachraum. Somit ist ( fn )n∈N in B(E, X) genau
dann konvergent, wenn diese Folge bzgl. k.k∞ eine Cauchy-Folge ist.
2. Ist E Teilmenge eines metrischen Raumes, so wissen wir schon, dass Cb (E, X)
abgeschlossen in B(E, X) ist, was zur Folge hat, dass die Grenzfunktion f stetig
ist, wenn alle fn es sind; vgl. Korollar 6.6.13.
P
3. Weierstraßsches Konvergenzkriterium (siehe Korollar 6.7.4): Ist ∞
n=1 fn eine
Reihe von X-wertigen beschränkten Funktionen, so folgt aus der absoluten KonP
P∞
vergenz ∞
n=1 k fn k∞ < +∞ die gleichmäßige Konvergenz der Reihe
n=1 fn .
Die absolute Konvergenz gilt insbesondere, wenn es eine konvergente Reihe
P∞
n=1 αn von nichtnegativen reellen Zahlen mit k fn k∞ ≤ αn gibt.
Das Weierstraßsche Konvergenzkriterium ist nichts anderes, als das Majorantenkriterium angewandt auf den Banachraum B(E, X); siehe (9.8).
4. Für Potenzreihen zeigt man fast genauso wie in Satz 6.7.7 folgenden Sachverhalt.
P
n
Für an ∈ X, n ∈ N ∪ {0}, sei R das Supremum aller |z|, sodass die Reihe ∞
n=0 z an
konvergiert. Dabei ist je nach Skalarkörper z ∈ R bzw. z ∈ C. Dann konvergiert
P
n
die Reihe ∞
n=0 z an in X absolut, wenn z ∈ R (C), |z| < R. Im Falle |z| > R
divergiert sie.
Für |z| ≤ r < R konvergiert sie gleichmäßig. Somit ist auf {z ∈ R (C) : |z| ≤ r} die
P
n
C
Funktion z 7→ ∞
n=0 z an (∈ X) stetig und beschränkt, d.h. sie liegt in C(Kr (0), X).
Auf {z : |z| < R} ist sie stetig.
Für R gilt auch (lim supn→∞
√
R = (lim supn→∞ n kan k)−1 .
kan+1 k −1
kan k )
≤ R ≤ (lim inf n→∞
kan+1 k −1
kan k )
und
Auch die Differentialrechnung lässt sich auf Funktionen mit Werten in normierten
Räumen ausdehnen.
9.3.9 Definition. Ist I ein reelles Intervall und f : I → X, so heißt f im Punkt x ∈ I
differenzierbar, wenn der Grenzwert
d
1
f (x) = f ′ (x) := lim
( f (t) − f (x))
t→x t − x
dx
in X existiert, wobei dieser Grenzwert einseitig zu verstehen ist, wenn x ein Randpunkt
von I ist. Ist f bei allen x ∈ I differenzierbar, so heißt f differenzierbar. Die Funktion
x 7→ f ′ (x) (Ableitung von f ) ist dann eine Abbildung von I nach X. Ist diese stetig, so
heißt f stetig differenzierbar. Mit C 1 I, X wird die Menge aller stetig differenzierbaren
X-wertigen Funktionen auf I bezeichnet.
Analog zum skalaren Fall definiert man auch die höheren Ableitungen.
9.3.10 Bemerkung. Im Falle X = R p kann man sich f (I) als Kurve vorstellen. Die
Ableitung f ′ (x) ist dann der Anschauung nach nichts anderes, als der Tangentialvektor
an diese Kurve im Punkt f (x).
Wir wollen uns auch ein Beispiel einer Funktion von einem Intervall in einen unendlich dimensionalen Banachraum anschauen.
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
55
9.3.11 Beispiel. Sei X = Cb (0, 1) der Banachraum aller reellwertigen, beschränkten
und stetigen Funktionen auf dem Intervall (0, 1) versehen mit der Supremumsnorm
k.k∞ .
Für t ∈ R sei f (t) die Funktion s 7→ et s(1 − s) . Man überzeugt sich leicht, dass
f (t) ∈ X = Cb (0, 1). Also
(
R → X
.
f :
t 7→ s 7→ et s(1 − s)
Für x, t ∈ R gilt
1 ( f (t) − f (x)) − f (x) = sup 1 et s(1 − s) − e x s(1 − s) − e x s(1 − s) =
t − x
∞
s∈(0,1) t − x
1 et − e x − e x · sup |s(1 − s)| = 1 et − e x − e x · 1 .
t − x
2
t − x
s∈(0,1)
1
1
( f (t) − f (x)) in X für t → x
Wegen limt→x t−x
et − e x = e x konvergiert somit t−x
′
gegen f (x). Also gilt f (x) = f (x).
9.3.12 Fakta. Ähnlich wie im skalarwertigen Fall zeigt man folgende Regeln.
1. Die Ableitung von konstanten Funktionen ist 0 ∈ X.
1
( f (t) − f (x)) → 0 · f ′ (x) = 0 für t → x, folgt aus
2. Wegen f (t) − f (x) = (t − x) · t−x
der Ableitbarkeit von f bei x die Stetigkeit von f bei x.
3. ( f + g)′ (x) = f ′ (x) + g′ (x), (λ f )′ (x) = λ f ′ (x), (α f )′ (x) = α′ (x) f (x) + α(x) f ′ (x),
wobei λ ∈ R (C), f, g : I → X und α : I → R (C). Siehe Satz 7.1.7. Die
Gleichheitszeichen sind dabei so zu interpretieren, dass die linke Seite existiert,
wenn die rechte Seite existiert und dann die Gleichheit gilt.
4. Ähnlich wie bei den Reihen sieht man, dass für jedes lineare und beschränkte
T : X → Y mit f auch T ◦ f bei einem x ∈ I differenzierbar ist, wobei dann
T ( f ′ (x)) = (T f )′ (x).
Insbesondere gilt für eine auf einem Intervall I definierte, R- bzw. C-wertige
und bei x differenzierbare Funktion α und einem a ∈ X, dass auch die Funktion
t 7→ α(t)a von I nach X bei x differenzierbar ist, wobei (α(.)a)′(x) = α′ (x)a.
5. Kettenregel (Satz 7.1.9): Sei f : (c, d) → X und α : (a, b) → R mit α (a, b) ⊆
(c, d). Dann gilt
( f ◦ α)′ (x) = α′ (x) f ′ (α(x)) ,
(9.11)
falls die Ableitungen rechts existieren.
Kann man Produkte von Funktionen bilden, so gelten jeweils auch Produktregeln.
6. Sei I ein reelles Intervall und f : I → L(X, Y), g : I → L(Y, Z). Für x ∈ I und
t ∈ I \ {x} gilt
k
1
g(t) f (t) − g(x) f (x) − g′ (x) f (x) − g(x) f ′ (x)k =
t−x
KAPITEL 9. NORMEN UND BANACHRÄUME
56
kg(t)
1
f (t) − f (x) − g(t) f ′ (x) + g(t) f ′ (x) − g(x) f ′ (x)+
t−x
1
g(t) − g(x) f (x) − g′ (x) f (x)k ≤
t−x
kg(t)k · k
1
f (t) − f (x) − f ′ (x)k + kg(t) − g(x)k · k f ′ (x)k+
t−x
1
k
g(t) − g(x) − g′ (x)k · k f (x)k .
t−x
Sind f und g bei x differenzierbar, so sind sie dort auch stetig und daher konvergieren für t → x alle Summanden gegen Null. Damit ist auch g f bei x differenzierbar, wobei
(g f )′ (x) = g′ (x) f (x) + g(x) f ′ (x) .
(9.12)
7. Entsprechend zeigt man ( f h)′ (x) = f ′ (x)h(x) + f (x)h′ (x), wenn f : I → L(X, Y)
und h : I → X, oder auch wenn f : I → R (C) und h : I → X.
8. Sind f, g : I → R p in einem Punkt x ∈ I differenzierbar, so zeigt man ähnlich
wie oben aber unter Zuhilfenahme der Cauchy-Schwarzschen Ungleichung, dass
die Funktion7 t 7→ ( f (t), g(t)) von I nach R auch in x differenzierbar ist, wobei
( f, g)′ (x) = ( f (x), g′ (x)) + ( f ′ (x), g(x)).
9.3.13 Beispiel. Sei X = Cb (0, 1) wieder der Banachraum aller reellwertigen, beschränkten und stetigen Funktionen auf dem Intervall (0, 1) versehen mit der Supremumsnorm k.k∞ .
√ Für t ∈ [0, 1] sei f (t) die Funktion s 7→ s+tt . Man überzeugt sich leicht, dass
f (t) ∈ X = Cb (0, 1). Also
(
[0, 1] → X
√ .
f :
t
7→ s 7→ s+tt
Klarerweise ist f (0) die Nullfunktion und somit (t > 0)
√
√
1
t
t
k f (t) − f (0)k∞ = sup
= lim
= √ .
s→0+ s + t
t
s∈(0,1) s + t
Der Grenzwert dieses Ausdruckes für t → 0 ist aber sicherlich nicht 0. Also ist f bei
t = 0 nicht stetig und daher insbesondere nicht differenzierbar. √
Man beachte, dass für feste s ∈ (0, 1) die Funktion t 7→ s+tt bei t = 0 sehr wohl
stetig ist.
Viele Resultate, die sich aus dem Mittelwertsatz, Satz 7.2.6, herleiten haben lassen,
können nicht unmittelbar auf Funktionen mit Werten in normierten Räumen verallgemeinert werden. Manches lässt sich jedoch mit Hilfe des folgenden Lemmas retten.
9.3.14 Lemma. Ist f : [a, b] → X stetig, f |(a,b) differenzierbar und gilt f ′ (x) = 0 für
alle x ∈ (a, b), so ist f konstant.
7 (., .)
bezeichnet das Skalarprodukt in R p .
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
57
Beweis. Subtrahieren wir von f (x) immer den Wert f (a), so können wir annehmen,
dass o.B.d.A. f (a) = 0.
Seien x, t ∈ (a, b), so folgt aus der Dreiecksungleichung k f (x)k ≤ k f (t) − f (x)k +
k f (t)k sowie k f (t)k ≤ k f (t) − f (x)k + k f (x)k. Also gilt
−k f (t) − f (x)k ≤ k f (t)k − k f (x)k ≤ k f (t) − f (x)k
und daher
− k f (t)k − k f (x)k 1
1
f (t) − f (x) ≤
f (t) − f (x) .
≤ t−x
t−x
t−x
Da k.k : X → R stetig ist, konvergieren für t → x die linke und die rechte Seite laut
Voraussetzung gegen 0 und nach dem Einschlusskriterium für Netze somit auch der
mittlere Ausdruck.
Also ist x 7→ k f (x)k auf (a, b) differenzierbar mit k f (x)k′ = 0 und klarerweise auf
[a, b] stetig. Wegen k f (a)k = 0 folgt aus dem Mittelwertsatz angewandt auf k f (x)k,
dass k f (x)k = 0, und somit f (x) = 0 für alle x ∈ [a, b].
❑
Als Folgerung erhält man z.B. dass zwei ableitbare X-wertige Funktionen übereinstimmen, wenn sie es an einer Stelle tun, und wenn ihre Ableitungen gleich sind.
9.3.15 Definition. Sei f : [a, b] → X eine beschränkte Funktion. Konvergiert das Netz
(S ( f, R))R∈R in X, wobei8
S ( f, R) =
n(R)
X
j=1
(ξ j − ξ j−1 ) f (α j ) ,
so heißt f Riemann-integrierbar. In diesem Fall schreiben wir
Z b
f (t) dt := lim S ( f, R) .
a
|R|→0
Der Zugang zu Integralen mit Ober- und Untersummen funktioniert offensichtlich
hier nicht.
9.3.16 Fakta. Man kann genauso wie im skalaren Fall folgende Tatsachen für den
normierten Raum wertigen Fall beweisen, indem man in den jeweiligen Beweisen an
den richtigen Stellen |.| durch k.k ersetzt.
1. Rechenregeln (Lemma 8.2.9):
Zb
a
(λ f + µg) dx = λ
Zb
a
f dx + µ
Zb
g dx ,
a
b
Z−
Zb
f dx ≤
k f (x)k dx ≤ k f k∞ (b − a) .
a
a
(9.13)
wobei f, g : [a, b] → X Riemann-integrierbar sind, und λ, µ ∈ R (C) je nachdem,
was der Skalarkörper von X ist. Zur Erinnerung: k f k∞ = supx∈[a,b] k f (x)k.
8 Vgl.
Definition 8.2.1.
KAPITEL 9. NORMEN UND BANACHRÄUME
58
2. Ist T : X → Y beschränkt und linear, so folgt aus der Stetigkeit von T
Z
Z
T ( f (t) dt) = T ( lim S ( f, R)) = lim S (T f, R) =
T f (t) dt .
|R|→0
|R|→0
(9.14)
Insbesondere gilt für ein Riemann-integrierbares g : [a, b] → R (C) und x ∈ X,
Rb
Rb
dass a (g(t)x) dt = ( a g(t) dt)x.
Setzt man noch voraus, dass (X, k.k) ein Banachraum ist, so gelten auch folgende
Aussagen, die ganz ähnlich wie im skalaren Fall zu beweisen sind. Um zu zeigen,
wie wenig sich die Beweise vom skalaren Fall unterscheiden, ist der Beweis von 3
ausgeführt.
3. Ist f : [a, b] → X stetig, so ist f Riemann-integrierbar, vgl. Satz 8.3.4.
Beweis. Genauso wie in Lemma 8.3.3 zeigt man zunächst für eine beschränkte
Abbildung f : [a, b] → X und zwei Riemann-Zerlegungen R1 und R2 von [a, b]
S (R1 ) − S (R2 ) ≤ 2(b − a) · ρ(max(|R1 |, |R2 |)) ,
(9.15)
wobei
ρ(γ) = sup{ k f (s) − f (t)k : s, t ∈ [a, b], |s − t| ≤ γ }, γ > 0 ,
die Oszillation von f bezeichnet. Um das einzusehen, sei R eine RiemannZerlegung, deren Stützstellen die von R1 und R2 umfasst. Das bedeutet, dass
mit
n(R2 ) n(R1 ) n(R2 )
1)
R1 = (ξ j )n(R
j=0 ; (α j ) j=1 , R2 = (ζ j ) j=0 ; (γ j ) j=1 ,
n(R) R = (η j )n(R)
j=0 ; (β j ) j=1 ,
die Beziehung
{ξ j : j = 0, . . . , n(R1 )} ∪ {ζ j : j = 0, . . . , n(R2 )} ⊆ {η j : j = 0, . . . , n(R)}
gilt. Ist j ∈ {1, . . . , n(R1 )}, so gibt es Indizes k( j − 1) < k( j), sodass
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 < ηk( j) = ξ j .
|
{z
}
k( j)−k( j−1)−1 viele
Wir erhalten wegen (ξ j − ξ j−1 ) f (α j ) =
Pk( j)
k=k( j−1)+1 (ηk
− ηk−1 ) f (α j )
k( j)
X
X1 )
n(R
=
(ξ j − ξ j−1 ) f (α j ) −
S (R1 ) − S (R) = (η
−
η
)
f
(β
)
k
k−1
k
k=k( j−1)+1
j=1
n(R
X1 )
k( j)
X
(ηk − ηk−1 ) f (α j ) − f (βk ) ≤
j=1 k=k( j−1)+1
n(R
X1 )
k( j)
X
j=1 k=k( j−1)+1
(ηk − ηk−1 ) · k f (α j ) − f (βk )k .
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
59
Bemerkt man, dass |α j − βk | ≤ (ξ j − ξ j−1 ) ≤ |R1 |, k ∈ {k( j − 1) + 1, . . . , k( j)}, so
folgt
kS (R1 ) − S (R)k ≤
n(R
X2 )
k=1
(ηk − ηk−1 ) · ρ(|R1 |) = (b − a) · ρ(|R1 |) .
Genauso zeigt man kS (R2 ) − S (R)k ≤ (b − a) · ρ(|R2 |). Aus der Dreiecksungleichung und der Monotonie von ρ folgt dann (9.15).
Ist nun f : [a, b] → X stetig, so ist f wegen Proposition 6.1.13 beschränkt und
wegen Satz 6.3.3 sogar gleichmäßig stetig.
Gemäß Lemma 5.3.11 folgt die Konvergenz von S (R) R∈R in X, wenn wir zei
gen können, dass S (R) R∈R in X ein Cauchy-Netz ist.
ǫ
Dazu sei ǫ > 0, und sei δ > 0 so, dass ρ(δ) ≤ 3(b−a)
; vgl. Bemerkung 8.3.2. Sind
nun R1 und R2 Riemann-Zerlegungen von [a, b] mit |R1 |, |R2 | < δ, so folgt aus
(9.15) sofort
kS (R1 ) − S (R2 )k ≤ 2(b − a) · ρ(max(|R1 |, |R2 |)) < ǫ
und damit die Tatsache, dass S (R) R∈R ein Cauchy-Netz ist.
❑
4. Sei f : [a, b] → X und c < d, [c, d] ⊆ [a, b]. Dann ist f |[c,d] über [c, d] Riemannintegrierbar genau dann, wenn 1[c,d] f es über [a, b] ist. Das ist insbesondere der
Fall, wenn f über [a, b] Riemann-integrierbar ist. vgl. Lemma 8.4.1.
5. Der Hauptsatz der Differential- und Integralrechnung (Satz 8.4.5) gilt auch für
Banachraum-wertige Funktionen:
Ist f : [a, b] → X Riemann-integrierbar, und setzt man für a ≤ x ≤ b
F(x) :=
Zx
f (t) dt ,
a
so ist F stetig auf [a, b]. Ist f in einem Punkt x0 stetig, so ist F bei x0 differenzierbar, und es gilt F ′ (x0 ) = f (x0 ).
6. Ist f : [a, b] → X stetig, und ist G : [a, b] → X stetig und stetig differenzierRx
bar auf (a, b), sodass G′ (x) = f (x), x ∈ (a, b), so erfüllt G(x) − f (t) dt die
a
Voraussetzung von Lemma 9.3.14. Also ist diese Funktion konstant, woraus
Zb
f (t) dt = G(b) − G(a)
(9.16)
a
folgt.
Man erhält
R x also wie im skalarwertigen Fall, dass der Integrationsoperator f 7→
(x 7→ a f (t) dt) den Vektorraum C([a, b], X) bijektiv auf die Hyperebene aller
bei a verschwindenden Funktionen in C 1 ([a, b], X) abbildet.
KAPITEL 9. NORMEN UND BANACHRÄUME
60
7. Sei I ⊆ R ein Intervall mit endlicher linker Intervallgrenze a, die in I liege. Ist f : I → X eine Funktion, dann gilt f ∈ C 1 (I, X) genau dann, wenn
f ∈ C(I, X), f |I\{a} ∈ C 1 (I \ {a}, X) und der X-wertige Grenzwert limtցa f ′ (t)
existiert, vgl. Korollar 7.2.17. Eine entsprechende Aussage gilt für die rechte
Intervallgrenze von I.
Um das einzusehen, sei f ∈ C(I, X), f |I\{a} ∈ C 1 (I \ {a}, X) und existiere
limtցa f ′ (t). Setzen wir g(t) = f ′ (t), t ∈ I \ {a}, und g(a) = limtցa f ′ (t), so
gilt klarerweise
R xg ∈ C(I, X), vgl. Bemerkung 6.4.4. Die X-wertige Funktion
F(x) = f (x) − a g(t) dt, x ∈ I, ist auf I stetig, hat auf I \ {a} eine verschwindende Ableitung, und ist somit wegen Lemma 9.3.14
R x auf jedem Intervall der Form
[a, s] mit s ∈ I konstant. Also ist mit x 7→ a g(t) dt, x ∈ [a, s] auch f (x) auf
[a, s] stetig differenzierbar; vgl. (5). Die Umkehrung gilt offensichtlich auch.
8. Da die Kettenregel (9.11) und auch die Produktregel für Funktion f : I → R (C)
und h : I → X (vgl. Fakta 9.3.12, 7) gilt, leitet man wie in Lemma 8.4.12 bzw.
Lemma 8.4.13 aus (9.16) die Substitutionsregel
Z β
Z g(β)
f (g(t))g′ (t) dt .
f (x) dx =
α
g(α)
mit R-wertige und stetig differenzierbarer Funktion g und stetiger, X-wertiger
Funktion f und die Regel der partiellen Integration
Zb
′
f g dx = f (b)g(b) − f (a)g(a) −
a
Zb
f g′ dx .
a
für stetig differenzierbare Funktionen f und g her, wobei f skalarwertig sein
muss, damit das Produkt von zwei Funktion erklärt ist.
9. Uneigentliche Riemann-Integrale lassen sich genauso wie im skalaren Fall definieren, siehe Definition 8.6.1.
Insbesondere zeigt man wie in Lemma 8.6.3, dass aus absoluten Konvergenz
Rb
Rb
von a g(x) dx einer Funktion g : [a, b) → X, dh. a kg(x)k dx < +∞, die
Rβ
Rb
Konvergenz von a g(x) dx, dh. von limβրa a g(x) dx in X folgt. Ist obendrein
Rb
kg(x)k ≥ k f (x)k für alle x ab einem c ∈ [a, b), so ist auch a f (x) dx absolut
konvergent, wobei f : [a, b) → X.
Bei diesem Schluss von absoluter Konvergenz auf die Konvergenz muss man
voraussetzen, dass für alle β ∈ [a, b) die Funktionen g, f, kg(.)k, k f (.)k auf [a, β]
Riemann-integrierbar sind.
10. Wie im skalaren Fall kann man auch Integral und Grenzübergang vertauschen
(siehe Satz 8.7.2)
Zb
Zb
lim
fn dx =
f dx .
(9.17)
n→∞
a
a
11. Genauso wie im skalaren Fall gilt für stetige Funktionen f : [a, b] × K → X –
dabei ist K kompakte Teilmenge eines metrischen Raumes –, dass R : K → X
definiert durch
Z
b
f (s, t) ds
R(t) =
a
(9.18)
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
61
stetig ist; vgl. Korollar 8.7.9.
Ebenfalls kann man für Banachraum-wertige Funktionen f : [a, b] × [c, d] → X
die Integrationsreihenfolge vertauschen (siehe Satz 8.7.10)
!
!
Z d Z b
Z b Z d
f (s, t) ds dt .
f (s, t) dt ds =
a
c
c
a
Schließlich kann man Integral und Ableitung vertauschen (siehe Korollar
8.7.12):
Z d
Z d
d
d
f (s, t) dt ,
(9.19)
f (s, t) dt =
ds c
ds
c
wenn f (s, t) und
d
ds
f (s, t) beide auf [a, b]×[c, d] stetig sind und Werte in X haben.
12. Man kann nun auch die Rechnung aus Proposition 8.8.2 nochmals für f : I → X
durchführen, um für eine (n + 1)-mal stetig differenzierbare Funktion die Taylorsche Entwicklung
n
X
1 (k)
f (y) +
f (x) =
(x − y)
k!
k=0
k
Zx
(x − t)n (n+1)
f
(t) dt .
n!
(9.20)
y
zu erhalten. Nur eine Abschätzung des Restgliedes mit Hilfe von f (n+1) ausgewertet an einer gewissen Stelle zwischen x und y wie im R-wertigen Fall hat man
nicht, da diese ja den Mittelwertsatz der Differentialrechnung bzw. Integralrechnung verwendet.
9.3.17 Bemerkung. Alle oben erwähnten Konzepte (Reihen, gleichmäßig konvergente
Funktionen, Ableitung, Integral) hängen nicht von der Norm auf X ab, solange diese
zur ursprünglich auf X gegenen Norm äquivalent sind, denn Grenzwerte und deren
Existenz in X bleiben unverändert, wenn man zu einer äquivalenten Norm wechselt.
9.3.18 Bemerkung. Ist X = Rd , so wissen wir, dass die Konvergenz eines Netz zur komponentenweisen Konvergenz äquivalent ist, wobei die Komponenten des Grenzwertes
genau die Grenzwerte der Komponentennetze sind.
Somit erhalten wir
P∞
d
f1
dt f1 (t)
an,1 n=1 an,1
∞
X
d .
..
..
.. (t) = ... ,
. =
,
.
P∞
d
dt
n=1
fd
an,d
f
(t)
d
n=1 an,d
dt
Z
a
b
R b
f1
a
.
.. (t) dt =
R
b
fd
a
f1 (t) dt
..
,
.
fd (t) dt
in dem Sinne, dass die linken Seiten genau dann existieren, wenn die rechten es tun.
Als Anwendung für obige eher abstrakt wirkende Konzepte wollen wir die Exponentialfunktion, die einer p × p-Matrix wieder eine p × p-Matrix zuweist, betrachten.
KAPITEL 9. NORMEN UND BANACHRÄUME
62
9.3.19 Beispiel. Sei A ∈ R p×p . Man betrachte die R p×p -wertige Potenzreihe (t ∈ R)
etA :=
∞
X
n=0
tn
1 n
A .
n!
(9.21)
Dabei sei R p×p mit einer Abbildungsnorm versehen. Wegen
ktn
1 n
(|t| kAk)n
A k≤
n!
n!
folgt nach dem Majorantenkriterium die absolute Konvergenz von etA für alle t ∈ R, da
ja
∞
X
(|t| kAk)n
(= e|t| kAk )
n!
n=0
konvergiert. Somit ist der Konvergenzradius R von (9.21) gleich +∞. Als Grenzfunktion einer Potenzreihe ist t 7→ etA eine stetige Funktion von R nach R p×p .
Wegen der Beschränktheit der Abbildungen B 7→ AB, B 7→ BA als Abbildungen
von R p×p nach R p×p gilt wegen (9.7)
∞
∞
X n 1 n X
1
tA
A =
(9.22)
Ae = A t
tn An+1 = etA A .
n!
n!
n=0
n=0
Sei x ∈ R. Da die Potenzreihe für auf [−|x|, |x|] gleichmäßig konvergiert, kann man
im Folgenden wegen (9.17) Integration und Grenzwert vertauschen.
Z
x
tA
e dt =
0
∞ Z
X
n=0
x
0
X xn+1
1 n n
t A dt =
An .
n!
(n
+
1)!
n=0
∞
Wegen (9.14) und (9.7) gilt somit
Z
0
x
tA
Ae dt = A
Z
0
x
etA dt =
∞
X
n=0
X 1
xn+1
An+1 =
xn An = e xA − I .
(n + 1)!
n!
n=1
∞
Aus dem Hauptsatz der Differential und Integralrechnung folgt daher dtd etA = AetA =
etA A.
Übrigens konvergiert etA auch für alle t ∈ R, wenn man R p×p mit einer anderen
Norm versieht, da diese alle äquivalent sind. Wir haben oben aber die Tatsache kAn k ≤
kAkn verwendet, welche i.A. nur von der Abbildungsnorm erfüllt wird.
9.3.20 Beispiel. Sei nun R eine weitere beliebige p × p-Matrix. Dann sieht man mit
Hilfe der Produktregel wie in (9.12), dass die Funktion f (t) = etA R eine Lösung des
Randwertproblems
f ′ (t) = A f (t), f (0) = R
(9.23)
ist. Ist umgekehrt f : R → R p×p eine weitere auf ganz R differenzierbare Lösung dieses Problems, so folgt aus der Produktregel für R p×p L(R p , R p )-wertige Funktionen
(9.12)
d −tA
(e f (t)) = −e−tA A f (t) + e−tA f ′ (t) = −e−tA A f (t) + e−tA A f (t) = 0 ,
dt
9.3. BANACHRAUMWERTIGE REIHEN, FUNKTIONEN, ETC.
63
und daher e−tA f (t) = e−0A f (0) = R. Da insbesondere etA eine Lösung von (9.23) mit
R = I ist, erhalten wir e−tA etA = I und somit e−tA = (etA )−1 .
Für unsere zunächst beliebige Lösung folgt daher auch f (t) = etA R. Also ist etA R
die einzige Lösung von (9.23).
Mit dieser Tatsache lässt sich nun auch die Frage behandeln, ob für die Exponentialfunktion wie im skalaren Fall gilt, dass eA+B = eA eB . Im Allgemeinen ist das nämlich
nicht richtig. Sollten aber A und B kommutieren (AB = BA), so gilt wegen (9.7)
∞
∞ n
∞ n
X
X
X tn n
t
t
tA
A B =
(An B) =
(BAn) = BetA ,
e B =
n!
n!
n!
n=0
n=0
n=0
und daher
d tA tB
(e e ) = AetA etB + etA BetB = (A + B)etAetB .
dt
Somit ist etA etB eine Lösung von (9.23) mit A ersetzt durch A + B und R ersetzt durch
I, und wegen der Eindeutigkeit der Lösung folgt et(A+B) = etA etB .
Betrachtet man die Abbildung A 7→ eA , so gilt folgende Aussage.
9.3.21 Proposition. Für jede p × p-Matrix A ∈ R p×p konvergiert die Reihe (A0 := I)
eA :=
∞
X
1 n
A .
n!
n=0
absolut im Banchraum R p×p versehen mit der Abbildungsnorm, wobei keA k ≤ ekAk und
zwar gleichmäßig auf jeder Menge der Form
Er = {A ∈ R p×p : kAk ≤ r}
für jedes beliebige 0 < r < +∞.
Die Abbildung A 7→ eA als Abbildung von R p×p nach R p×p ist stetig.
P kAkn
Beweis. Wegen (9.6) gilt kAn k ≤ kAkn für alle n ∈ N. Somit ist ∞
n=0 n! eine konverP∞ 1 n
gente Majorante und n=0 n! A konvergiert absolut, wobei keA k ≤ ekAk (siehe (9.8)).
Wegen der Beschränktheit der Abbildungen B 7→ AB, B 7→ BA als Abbildungen
von R p×p nach R p×p gilt wegen (9.7)
∞
∞
X 1 n X
1 n+1
A
A =
A = eA A .
Ae = A
n!
n!
n=0
n=0
Nun betrachte für ein r > 0 die Teilmenge
Er = {A ∈ R p×p : kAk ≤ r}
n
von R p×p . Für A ∈ Er gilt n!1 An ≤ rn! , und daher können wir das Weierstraßsche
P
N
1 n
Konvergenzkriterium anwenden. Insbesondere konvergiert dann
n=0 n! A N∈N für
N → ∞ gleichmäßig auf Er gegen die Funktion A 7→ eA .
Nach Korollar 9.2.9 ist A 7→ An stetig auf Er für alle n ∈ N, und nach Korollar 9.1.3
PN 1 n
ist auch A 7→ n=0
n! A stetig auf E r .
Da die Grenzfunktion von einer Folge stetiger Funktionen bei gleichmäßiger
Konvergenz wieder stetig ist, folgt die Stetigkeit von A 7→ eA auf Er . Weil die
Stetigkeit eine lokale Eigenschaft ist, folgt diese damit auf ganz R p×p .
❑
KAPITEL 9. NORMEN UND BANACHRÄUME
64
9.3.22 Bemerkung. Ganz ähnlich wie in Bemerkung 9.3.7 gelten auch Beispiel 9.3.19
und die Aussagen von Proposition 9.3.21 und Beispiel 9.3.20 für den Fall, dass A ∈
L(X, X) mit einem beliebigen Banachraum X. Die Beweise sind im wesentlichen die
selben.
9.4 Übungsbeispiele
9.1 Man beweise die Höldersche Ungleichung mit Hilfe von Beispiel 7.21:
p
Sei p ∈ R, p > 1 und sei q = p−1
. Weiters seien a j , b j ∈ [0, +∞), j = 1, . . . , n. Dann gilt
n
X
j=1
n
1
X p
p
a j b j ≤ a j
j=1
n
1
X q
q
b j .
j=1
Hinweis: Man beweise Die Ungleichung zuerst unter der zusätzlichen Voraussetzung, dass
b j > 0, j = 1, . . . , n. Dazu wende man das erwähntes Beispiel auf die Funktion x p und
a
I = [0, +∞) an, und setze µ j = bqj sowie x j = q−1j .
bj
n
9.2 Für p ≥ 1 sei k.k p : R → R definiert durch
k(x j )nj=1 k p
:=
v
t n
X
p
j=1
|x j | p .
Man zeige, dass k.k p eine Norm ist.
P
P
P
Hinweis: Es gilt j |x j + y j | p ≤ j |x j ||x j + y j | p−1 + j |y j ||x j + y j | p−1 . Nun wende man die
Höldersche Ungleichung an, .....
9.3 Man zeige, dass alle Normen k.k p , p ∈ [1, ∞] auf Rn äquivalent sind. Man zeige insbesondere, dass (1 ≤ p < q < ∞)
kxk∞ ≤ kxkq ≤ kxk p ≤ nkxk∞
Hinweis: Man verwende, dass aus 0 < p < q und λ ∈ [0, 1] folgt, dass λq ≤ λ p .
9.4 Man betrachte den Banachraum ℓ∞ (N, C) aller beschränkten, komplexwertigen Folgen versehen mit der Norm k.k∞ ; also k(zn )n∈N k∞ = supn∈N |zn |.
Zeigen Sie, dass die Menge c0 (N, C) aller komplexwertigen Nullfolgen ein abgeschlossener
Unterraum von ℓ∞ (N, C) ist.
Weiters bestimme man den Abschluss c(F) von F in dem Banachraum ℓ∞ (N, C), wobei
F = {(zn )n∈N ∈ ℓ∞ (N, C) : ∃N ∈ N, zn = 0 für alle n ≥ N} .
Anmerkung: Wegen F , c(F) ist das ein Teilraum eines Banachraumes, der nicht abgeschlossen ist.
9.5 Seien A1 : R2 → R2 , A2 : R3 → R und A3 : R → R3 in Matrixdarstellung gegeben durch
!
5
2 −1
, A2 = −2 0 2 , A3 = 0 ,
A1 =
0 1
1
wobei die Ausgangsräume der Abbildungen mit k.k∞ und die Zielräume mit k.k1 versehen
sind. Berechnen Sie die Abbildungsnormen von A1 , A2 , A3
9.6 Sei D = diag(λ1 , . . . , λn ) eine Diagonalmatrix im Rn×n . Man bereche kDk2 , kDk∞ , wenn man
2
D als Element vom Rn Rn×n betrachtet.
Weiters berechne man die Abbildungsnorm von D als Element von L(Rn , Rn ), wenn man Rn
vorne und hinten mit der k.k2 -Norm versieht.
9.4. ÜBUNGSBEISPIELE
65
9.7 Mit der Notation aus dem vorherigen Beispiel berechne man die Abbildungsnorm von D als
Element von L(Rn , Rn ), wenn man Rn vorne und hinten mit der k.k∞ -Norm versieht.
9.8 Sei Rn versehen mit k.k1 . Man betrachte L(Rn , R) den Raum aller linearen Abbildungen von
Rn nach R, d.h. den Dualraum von Rn , versehen mit der Abbildungsnorm k.k. Bekanntlich
ist L(Rn , R) isomorph zu Rn , indem man ein A ∈ L(Rn , R) in Matrixform (a1 , . . . , an ) angibt.
Man zeige, dass dann k.k mit der k.k∞ -Norm übereinstimmt.
9.9 Sei Rn versehen mit k.k∞ . Man betrachte L(Rn , R) den Raum aller linearen Abbildungen von
Rn nach R, d.h. den Dualraum von Rn , versehen mit der Abbildungsnorm k.k. Bekanntlich
ist L(Rn , R) isomorph zu Rn , indem man ein A ∈ L(Rn , R) in Matrixform (a1 , . . . , an ) angibt.
Man zeige, dass dann k.k mit der k.k1 -Norm übereinstimmt.
9.10 Mit welcher Norm stimmt die Abbildungsnorm auf L(Rn , R) überein, wenn man Rn mit k.k2
versieht. Warum?
9.11 Man betrachte den Banachraum ℓ∞ (N, C) aller beschränkten, komplexwertigen Folgen versehen mit der Norm k.k∞ ; also k(zn )n∈N k∞ = supn∈N |zn |.
c0 (N, C) sei der Banachraum aller komplexwertigen Nullfolgen.
Weiters sei A : ℓ∞ (N, C) → c0 (N, C) definiert durch
1
A((zn )n∈N ) = ( zn )n∈N .
n
Man zeige, dass A tatsächlich nach c0 (N, C) hinein abbildet, und dass A linear, beschränkt,
injektiv, aber nicht surjektiv ist.
9.12 Seien (X, k.kX ) und (Y, k.kY ) ein normierte Räume und (L(X, Y), k.k) der Raum aller beschränkten linearen Abbildungen von X nach Y. Weiters sei x ∈ X fest. Zeigen, Sie, dass die
Abbildung A 7→ Ax als Abbildung von L(X, Y) nach Y beschränkt und linear ist.
Ist weiters E eine nichtleere Menge und t ∈ E, so zeige man auch, dass die Abbildung
B(E, Y) → Y, f 7→ f (t)
beschränkt und linear ist. Bestimmen Sie die Abbildungsnorm dieser Abbildung!
9.13 Sei M eine Menge und B(M, R) der Banachraum aller beschränkten, reellwertigen Funktionen auf M versehen mit der Norm k.k∞ .
Seien t1 , . . . , tn ∈ I. Man zeige, dass die Abbildung T : B(M, R) → Rn definiert durch
linear und beschränkt ist.
f (t1 )
.
T ( f ) = ..
f (tn )
9.14 Man betrachte die Menge Cb [a, b] aller stetigen reellwertigen Funktionen auf [a, b] und
versehe diese mit
Z b
k f k1 :=
| f (t)| dt .
a
Zeigen Sie, dass k.k1 eine Norm ist, und dass (Cb [a, b], k.k1 ) kein Banchraum ist, indem Sie
eine Cauchy-Folge angeben, die nicht konvergiert.
Hinweis: OBdA. sei a = −1, b = 1. Approximieren Sie sgn(x) (diese liegt nicht in Cb [a, b])
geeignet durch eine Folge stetiger Funktionen.
9.15 Sei Cb [0, 1] die Menge aller stetigen und komplexwertigen Funktionen auf [0, 1] versehen
mit der Supremumsnorm. Weiters sei h : [−1, 1] → Cb [0, 1] definiert durch
h(t) = (s 7→
s
).
s+2+t
KAPITEL 9. NORMEN UND BANACHRÄUME
66
Zeigen Sie, dass h stetig ist, indem Sie kh(t1 ) − h(t2 )k∞ abschätzen. Berechnen Sie auch
Z 1
h(t) dt .
−1
Hinweis: Verwenden Sie (9.14) mit T s : Cb [0, 1] → C, T ( f ) = f (s) für jedes feste s ∈ [0, 1].
9.16 Seien T, A ∈ Rn×n , und sei T invertierbar. Man zeige, dass T −1 eA T = eT
rechne man eA , wenn A eine Diagonalmatrix ist und wenn
!
0 1
.
A=
0 0
9.17 Sei F : [1, 2] → R3 definiert durch
Berechnen Sie
R2
1
F(t) dt und F ′ .
−1 AT
. Weiters be-
3
t + 5
t2
F(t) = sin t + t+1 .
t exp(3t)
P
p
9.18 Für p ≥ 1 sei ℓ (N, C) die Menge aller komplexwertigen Folgen (zn )n∈N , die ∞
n=1 |zn | < +∞
p
erfüllen. Man zeige, dass ℓ (N, C) mit der gliedweisen
Addition und skalaren Multiplikation
pP
p
p
ein Vektorraum ist, und dass k(zn )n∈N k p := p ∞
n=1 |zn | eine Norm auf ℓ (N, C) ist.
p
Anmerkung: (ℓ (N, C), k.k p ) ist sogar ein Banachraum.
Ist nämlich ((zkn )n∈N )k∈N eine Cauchy-Folge in ℓ p (N, C), so ist für ein festes j ∈ N wegen
|zkj − zkj | ≤ k(zkn )n∈N − (zln )n∈N k p auch jede Komponentenfolgen (zkj )k∈N Cauchy-Folge und
somit konvergent gegen ein z j ∈ C konvergiert.
Es bleibt (zn )n∈N ∈ ℓ p (N, C) und k(zkn )n∈N − (zn )n∈N k p → 0 zu zeigen. Dazu sei ǫ > 0 und
N ∈ N beliebig und k0 so, dass k, l ≥ k0 ⇒ k(zkn )n∈N − (zln )n∈N k p ≤ ǫ. Wegen
v
t N
X
p
|zkn − zln | p ≤ k(zkn )n∈N − (zln )n∈N k p ≤ ǫ
p
n=1
folgt für l → ∞, dass mit beliebigen N ∈ N,
q
p PN
k
p
ungleichung
n=1 |zn | ≤ ǫ + k(zn )n∈N k p .
q
p
PN
n=1
|zkn − zn | p ≤ ǫ und wegen der Dreiecks-
Mit N → ∞ folgt aus letzerer Tatsache, dass (zn )n∈N ∈ l p , und aus der vorletzten Ungleichung
k(zkn )n∈N − (zn )n∈N k p ≤ ǫ und zwar für alle k ≥ k0 .
9.19 Man betrachte den normierten Raum (R p×p, k.k∞ ), und zeige, dass die Funktionen A 7→
Pp
spur(A) (= i=1
aii ), A 7→ det(A) stetig auf R p×p sind, und die Funktion A 7→ A−1 stetig auf
p×p
GL(p, R) (⊆ R ) ist.
Weiters sei y ∈ R p fest und man betrachte die Funktion von GL(p, R) (alle invertierbaren
p × p-Matrizen) nach R p , die jedem A ∈ GL(p, R) die Lösung x der Gleichung Ax = y
zuweist. Man zeige, dass diese Funktion auch stetig ist.
9.20 Sei (wn )n∈N eine komplexe Folge in einem normierten Raum (X, k.k), die für n → ∞ gegen
einen Grenzwert w ∈ X konvergiert. Man zeige, dass dann auch die Folge
w1 + · · · + wn
n
gegen w konvergiert.
Hinweis: Zeigen Sie das Ergebnis zuerst unter der Annahme, dass wn ∈ R, wn ≥ 0 und w =
0, und führen Sie das allgemeine Ergbenis auf diesen Fall zurück, indem Sie die Trivialität
w = w+···+w
verwenden.
n
Kapitel 10
Ableitungen nach mehreren
Variablen
10.1 Partielle Ableitungen
Wir wollen in diesem Kapitel die Differentialrechnung für auf D ⊆ Rn definierte Funktionen entwickeln. Dazu wollen wir im folgenden mit ei den i-ten kanonischen Basisvektor ei = (0, . . . , 0, 1, 0, . . . , 0)T mit der 1 an der i-ten Stelle bezeichnen.
10.1.1 Definition. Sei (X, k.k) ein Banachraum1. Sei f : D → X definiert auf einer
offenen Menge D ⊆ Rn . Existiert für ein x ∈ D der Limes
1
∂f
(x) := lim f (x + tei ) − f (x) ,
t→0 t
∂xi
(10.1)
so heißt dieser die partielle Ableitung von f nach der Variablen xi an der Stelle x.
∂f
(x) schreibt man auch Di f (x) oder f xi (x).
Anstatt ∂x
i
Ist allgemeiner v = (µ1 , . . . , µn )T ∈ Rn ein sogenannter Richtungsvektor, und existiert für x ∈ D der Limes
1
∂f
(x) := lim f (x + tv) − f (x)
t→0 t
∂v
so heißt dieser die Richtungsableitung von f an der Stelle x in Richtung v.
Offensichtlich gilt für den Richtungsvektor ei
∂f
∂f
(x) =
(x) .
∂xi
∂ei
10.1.2 Bemerkung. Für x ∈ D und v ∈ Rn ist die Abbildung t 7→ x + tv von R nach
Rn stetig, wobei 0 auf x abgebildet wird. Da D ⊆ Rn offen ist, gibt es daher ein reelles
Intervall (−δ, δ) mit δ > 0 um die Null, sodass x + tv ∈ D für alle t ∈ (−δ, δ). Setzt man
g(t) := f (x + tv), t ∈ (−δ, δ) ,
1 Man
sollte anfangs einfach an R oder Rm denken.
67
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
68
so bildet g das Intervall (−δ, δ) nach X hinein ab. Wegen
1
1
f (x + tv) − f (x) = g(t) − g(0)
t
t
ist g genau dann bei Null differenzierbar, wenn
∂f
∂v (x)
existiert. In dem Fall gilt dann
∂f
(x) .
∂v
Richtungsableitungen sind ihrer Natur nach also “eindimensional“. Denn man betrachtet ja f eingeschränkt auf die Strecke x + tv, t ∈ (−δ, δ). Insbesondere variiert bei
der Bildung der partiellen Ableitung nach xi wie in (10.1) beim Differenzenquotienten
f (x+tei )− f (x)
im Vektor x + tei , t ∈ (−δ, δ) nur die i-te Koordinate.
t
g′ (0) =
e2
e2
v
x
x
x + te1
x + tv
e1
e1
Abbildung 10.1: Ableitung in Richtung der Koordinate x1 bzw. des Vektors v
10.1.3 Definition. Sei f : D ⊆ Rn → X definiert auf der offenen Menge D. Existieren
∂f
∂f
(x), . . . , ∂x
(x), x ∈ D, so heißt f partiell differenzierbar
alle partiellen Ableitungen ∂x
1
n
auf D.
∂f
Sind alle X-wertigen Funktionen x 7→ ∂x
(x), j = 1, . . . , n, darüber hinaus stetig
j
auf D, so heißt f stetig partiell differenzierbar. Wir schreiben dafür f ∈ C 1 bzw. f ∈
C 1 (D).
10.1.4 Bemerkung. Teilmengen A von Vektorräumen Y (über R oder C) heißen konvex,
falls für alle x, y ∈ A folgt, dass auch alle Punkte auf ihrer Verbindungsgeraden in D
liegen, also tx + (1 − t)y ∈ D, t ∈ [0, 1].
Ist Y sogar mit einer Norm k.k versehen und ist A = Uǫ (z) oder A = Kǫ (z) die
offene bzw. abgeschlossene Kugel vom Radius ǫ, so ist A konvex, denn aus den aus
den Ungleichungen kz − xk, kz − yk < (≤)ǫ folgt
kz − (tx + (1 − t)y)k = kt(z − x) + (1 − t)(z − y)k ≤
tkz − xk + (1 − t)kz − yk < (≤) tǫ + (1 − t)ǫ = ǫ .
10.1.5 Lemma. Sei f : D ⊆ Rn → X, v = (µ1 , . . . , µn )T ∈ Rn ein Richtungsvektor und
sei x ∈ D. Wähle δ > 0 so, dass x + tv ∈ D für t ∈ (−δ, δ). Falls f ∈ C 1 (D), so ist die
Funktion g : (−δ, δ) → X definiert durch
g(t) := f (x + tv), t ∈ (−δ, δ) ,
stetig differenzierbar auf (−δ, δ), dh. g ∈ C 1 (−δ, δ), wobei
g′ (t) =
n
X
i=1
µi
∂f
(x + tv) , t ∈ (−δ, δ) .
∂xi
10.1. PARTIELLE ABLEITUNGEN
69
Beweis. Sei t ∈ (−δ, δ), setze y = x + tv, und wähle ρ > 0 so klein, dass2 Uρ·kvk∞ (y) ⊆ D.
Betrachte die Vektoren
v0 := 0, vi := µ1 e1 + . . . + µi ei , i = 1, . . . , n .
Offensichtlich gilt vn = v sowie vi = vi−1 + µi ei für i = 1, . . . , n. Da die ganze Kugel mit
Radius ρ · kvk∞ und Mittelpunkt y in D liegt, sind alle Punkte y + svi in D für |s| < ρ,
und damit auch alle Verbindungsstrecken zwischen ihnen (Kugeln sind konvex, vgl.
Bemerkung 10.1.4).
Nun lässt sich g(t + s) − g(t) für |s| < ρ als Teleskopsumme
g(t + s) − g(t) = f (y + sv) − f (y) =
n
X
i=1
f (y + svi ) − f (y + svi−1 )
∂f
(y + svi−1 + τei ) genau die Ableitung von τ 7→ f (y + svi−1 + τei )
darstellen. Da τ 7→ ∂x
i
ist, stimmt diese Teleskopsumme nach dem Hauptsatz der Differential- und Integralrechnung (vgl. (9.16)) überein mit
n Z
X
i=1
Wir erhalten
sµi
0
∂f
(y + svi−1 + τei ) dτ .
∂xi
g(t + s) − g(t) X ∂ f
(y) =
−
µi
s
∂xi
i=1
n
Z
n
X
1
i=1
s
sµi
0
(10.2)
!
∂f
∂f
(y + svi−1 + τei ) −
(y) dτ .
∂xi
∂xi
Wegen (9.13) ist die Norm dieses Ausdruckes kleiner oder gleich
n
X
i=1
|µi |
∂ f (y + sv + τe ) − ∂ f (y) .
i−1
i
∂xi τ∈[−|sµi |,|sµi |] ∂xi
sup
Wegen der Stetigkeit der partiellen Ableitungen in y konvergiert dieser Ausdruck
gegen 0, wenn s → 0.
❑
Zusammen mit Bemerkung 10.1.2 erhalten wir unmittelbar aus Lemma 10.1.5
10.1.6 Korollar. Für eine Funktion f : D ⊆ Rn → X mit f ∈ C 1 (D) existieren alle
Richtungsableitungen ∂∂vf (x) für x ∈ D und v ∈ Rn . Für v = (µ1 , . . . , µn )T gilt dabei
X ∂f
∂f
(x) .
(x) =
µi
∂v
∂xi
i=1
n
Insbesondere ist auch x 7→
2 Wir
∂f
∂v (x)
eine stetige Funktion von D nach X.
versehen hier praktischerweise Rn mit k.k∞ .
(10.3)
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
70
10.1.7 Bemerkung. Wir haben im Beweis von Lemma 10.1.5 die Stetigkeit der partiellen Ableitungen (in allen Variablen gleichzeitig) benützt, um zu zeigen, dass (10.2)
gegen Null strebt, wenn s → 0.
Beachte, dass z.B. die Funktion
!
ξη
T
T
ξ
ξ2 +η2 , (ξ, η) , (0, 0)
f
=
T
T
0
η
, (ξ, η) = (0, 0)
aus Beispiel 6.1.11 stets Richtungsableitungen in Richtung der Koordinatenachsen besitzt, die Richtungsableitung in Richtung v = e1 + e2 jedoch bei 0 nicht existiert. Man
∂f
nicht weglassen.
kann also in Lemma 10.1.5 die Voraussetzung der Stetigkeit der ∂x
i
Die Tatsache, dass für festes x die Richtungsableitung
abhängt, legt folgende Begriffsbildung nahe.
∂f
∂v (x)
in (10.3) linear von v
10.1.8 Definition. Sei f : D ⊆ Rn → X stetig partiell differenzierbar, und x ∈ D. Dann
bezeichne d f (x) ∈ L(Rn , X) die lineare Abbildung
µ1
n
X
.
∂f
.. 7→
(x) .
µi
∂xi
i=1
µn
Sie heißt die Ableitung von f im Punkt x.
Nach Korollar 10.1.6 ist d f (x)v gerade ∂∂vf (x), also die Richtungsableitung von f in
∂f
(x).
x in Richtung v. Insbesondere gilt d f (x)ei = ∂x
i
10.1.9 Fakta.
1. Ist D ⊆ R, dh. n = 1, so ist d f (x) gerade jene lineare Abbildung R → X, die 1
auf f ′ (x) abbildet.
2. Wir wissen, dass Netze in Rm genau dann konvergieren, wenn sie komponentenweise konvergieren. Für X = Rm (versehen mit zB. k.k∞ ) ist somit die Tatsache,
dass eine Funktion f : D ⊆ Rn → Rm , f = ( f1 , . . . , fm )T , (stetig) partiell differenzierbar ist, äquivalent dazu, dass jede ihrer Komponenten fk (stetig) partiell
differenzierbar ist.
3. Ist f : D ⊆ Rn → Rm stetig partiell differenzierbar, und x ∈ D, und zerlegen wir f (x) in seine Komponenten, f (x) = ( f1 (x), . . . , fm (x))T , so hat d f (x) ∈
L(Rn , Rm ) Rm×n als Matrix die Darstellung
!
∂ fi
d f (x) =
(x)
.
i=1,...,m
∂x j
j=1,...,n
Ist dabei m = 1, d.h. f ist R-wertig, so nennt man den Vektor d f (x)T auch den
Gradienten und schreibt auch grad f (x) dafür.
4. Ist f : D ⊆ Rn → X eine affine Abbildung, also von der Form x 7→ x0 + Ax mit
x0 ∈ X und einer linearen Abbildung A : Rn → X, so hat man
x0 + A(x + tei ) − x0 + A(x)
A(tei )
= lim
= A(ei ) ,
d f (x)ei = lim
t→0
t→0
t
t
10.1. PARTIELLE ABLEITUNGEN
71
und damit d f (x) = A für alle x ∈ D. Das ist eine Verallgemeinerung der Tatsache,
dass im eindimensionalen die Ableitung einer linearen Funktion kx + d konstant
gleich der Steigung k ist.
10.1.10 Beispiel. Sei D = R+ × R ⊆ R2 und T : D → R2 definiert durch
!
!
r
r cos t
T
=
.
t
r sin t
Diese Polarkoordinatenfunktion kennen wir schon aus dem ersten Semester; siehe Definition 6.8.12 und Bemerkung 6.8.13. Nun gilt offensichtlich
!
!
!
!
∂T r
∂T r
cos t
−r sin t
=
=
und
.
sin t
r cos t
∂r t
∂t t
∂T
Also sind ∂T
∂r und ∂t stetig, und damit T stetig partiell differenzierbar. Die Ableitung
T
2
dT (r, t) ∈ L(R , R2 ) ist damit
!
!
r
cos t −r sin t
dT
=
,
(10.4)
t
sin t r cos t
und die Richtungsableitung von T im Punkt (r, t)T in Richtung v = (µ1 , µ2 )T ist nach
Korollar 10.1.6
!
!
!
!
∂T r
r µ1
µ cos t − µ2 r sin t
= dT
= 1
.
t µ2
µ1 sin t + µ2 r cos t
∂v t
Berechnen wir diese Richtungsableitung gemäß Bemerkung 10.1.2 direkt dadurch,
dass wir g′ (0) mit g(s) = T (r, t)T + s(µ1 , µ2 )T bestimmen, so erhalten wir auch
!
d
(r + sµ1 ) cos(t + sµ2 ) | s=0
′
ds
g (0) = d
=
ds (r + sµ1 ) sin(t + sµ2 ) | s=0
!
!
µ1 cos(t + sµ2 ) − (r + sµ1 )µ2 sin(t + sµ2 ) | s=0
µ cos t − µ2 r sin t
= 1
.
µ1 sin(t + sµ2 ) + (r + sµ1 )µ2 cos(t + sµ2 ) | s=0
µ1 sin t + µ2 r cos t
10.1.11 Proposition. Sei f : D ⊆ Rn → X mit f ∈ C 1 (D).
Versieht man L(Rn , X) mit der Abbildungsnorm (Rn versehen mit k.k∞ und X mit
der darauf gegebenen Norm k.k)3 , so ist die Abbildung
d f : D ⊆ Rn → L(Rn , X), x 7→ d f (x)
stetig.
Für festes x ∈ D gilt
f (x + z) = f (x) + d f (x)z + kzk∞ ǫ(z) ,
(10.5)
4
wenn x + z ∈ D \ {x}, mit einer Funktion ǫ : (D \ {x} − x) → X, sodass
limz→0 ǫ(z) = 0.
3 Versieht man Rn dagegen mit k.k , k.k oder einer anderen äquivalenten Norm, so ist die resultierende
1
2
Abbildungsnorm auf L(Rn , X) zwar eine andere aber zur eingangs definierten Abbildungsnorm auf L(Rn , X)
äquivalent.
4 Man beachte, dass D \ {x} − x eine Menge der Bauart U (0) \ {0} enthält.
δ
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
72
Beweis.
Für x, y ∈ D gilt
k d f (x) − d f (y) k = sup k d f (x)v − d f (y)v k =
kvk∞ ≤1
sup
|µ1 |,...,|µn |≤1
n
n X
X
∂ f
∂f
(x) −
(y) .
µ j d f (x)e j − d f (y)e j ≤
∂x j
∂x j
j=1
j=1
Wegen der vorausgesetzten Stetigkeit der partiellen Ableitungen folgt
d f (y) → d f (x) für y → x.
Wir setzen (x ∈ D und z , 0, sodass x + z ∈ D)
ǫ(z) :=
1
( f (x + z) − f (x) − d f (x)z ) .
kzk∞
Ist ρ > 0, sodass Uρ (x) = x + Uρ (0) ⊆ D und 0 < kzk < ρ, so ist ǫ(z) definiert,
und wir haben wegen (10.2) mit t = 0, s = kzk∞ , v = (µ1 , . . . , µn )T := kzkz ∞ , wobei
offensichtlich max j=1,...,n |µ j | = kvk∞ = 1,
!
Z
n
X
∂f
1 sµi ∂ f
k ǫ(z) k = (x + svi−1 + τei ) −
(x) dτ ≤
∂xi
∂xi
i=1 s 0
n
X
i=1
|µi |
∂ f (x + sv + τe ) − ∂ f (x) ≤
i−1
i
∂xi
τ∈[−|sµi |,|sµi |] ∂xi
n
X
∂f
∂f
(x + y) −
(x) .
sup ∂xi
∂xi
i=1 kyk∞ ≤kzk∞
sup
Dieser Ausdruck konvergiert wegen der Stetigkeit der partiellen Ableitungen für
z → 0 gegen 0.
❑
10.1.12 Bemerkung. Wir sehen also, dass sich f lokal bei x durch die affine Abbildung
x + z 7→ f (x) + d f (x)z approximieren lässt, wobei der Fehler mit kzk∞ ǫ(z) verhältnismäßig klein ist.
Ist X = Rm und stellt man sich f (D) als n-dimensionale Fläche im Rm vor, so ist
deshalb der affine Teilraum
{ f (x) + d f (x)z : z ∈ Rn }
der Anschauung nach gerade die Tangentialebene an f (D) im Punkt f (x).
Man kann auch umgekehrt starten.
10.1.13 Definition. Sei f : D ⊆ Rn → X und x ∈ D. Gibt es ein d f (x) ∈ L(Rn , X),
sodass (10.5) mit einer X-wertigen Funktion ǫ definiert auf Uρ (0) \ {0} für ein gewisses ρ > 0, mit x + Uρ (0) ⊆ D, sodass limz→0 ǫ(z) = 0 erfüllt ist, so heißt f bei x
differenzierbar.
f heißt stetig differenzierbar, wenn f bei allen x ∈ D differenzierbar und die Abbildung x 7→ d f (x) stetig auf D ist.
10.1. PARTIELLE ABLEITUNGEN
73
Aus (10.5) folgt unmittelbar
10.1.14 Korollar. Ist f : D → X bei x ∈ D differenzierbar, so ist f dort auch stetig.
10.1.15 Fakta.
1. Wir haben oben gesehen, dass jede stetig partiell differenzierbare Funktion stetig
differenzierbar ist.
2. Ist f bei x differenzierbar, so existieren wegen (0 , v ∈ Rn , s ∈ R, sv ∈ Uρ (0))
f (x + sv) − f (x)
s→0
= d f (x)v + sgn(s) kvk∞ ǫ(sv) −→ d f (x)v ,
s
auch alle Richtungsableitungen, insbesondere alle partiellen Ableitungen, wobei
∂f
∂v (x) = d f (x)v.
Man sieht damit auch, dass d f (x) eindeutig durch f bestimmt ist, es also kein
weiteres d̃ f (x) ∈ L(Rn , X) mit d̃ f (x) , d f (x) geben kann, das auch (10.5) erfüllt.
3. Ist f stetig differenzierbar, so sind auch die partiellen Ableitungen stetig, da ja
∂ f (x) − ∂ f (y) = k d f (x)e − d f (y)e k ≤ k d f (x) − d f (y) k · ke k .
i
i
i ∞
∂xi
∂xi Somit folgt aus stetig differenzierbar die Eigenschaft stetig partiell differenzierbar.
Wir haben somit folgenden Satz bewiesen.
10.1.16 Satz. Eine Funktion f : D ⊆ Rn → X ist genau dann stetig differenzierbar,
wenn sie stetig partiell differenzierbar ist.
10.1.17 Bemerkung. Wenn X mit einer zweiten, zu k.k äquivalenten Norm versehen ist,
bleiben die partiellen Ableitungen und die Ableitung unverändert, da für äquivalente
Normen Netze genau denn bezüglich der einen Norm konvergieren, wenn sie bezüglich
der anderen konvergieren, und in dem Fall auch die Grenzwerte übereinstimmen.
10.1.18 Proposition. Sei D ⊆ Rn offen. Sind f, g : D → X zwei stetig differenzierbare
Funktionen und λ, µ ∈ R, so ist es auch λ f + µg und es gilt für alle x ∈ D
d(λ f + µg)(x) = λd( f )(x) + µdg(x) .
Beweis. Der Beweis folgt unmittelbar durch eine entsprechende Linearkombination
der Gleichungen
f (x + z) = f (x) + d f (x)z + kzk∞ ǫ(z)
und
g(x + z) = g(x) + dg(x)z + kzk∞ ǫ̃(z) .
❑
Wie im Eindimensionalen lassen sich auch im Mehrdimensionalen viele Funktionen als Zusammensetzung von einfacheren Funktionen schreiben. Zur Berechnung der
Ableitung dient dann folgender Satz, der die bekannte Kettenregel verallgemeinert.
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
74
10.1.19 Proposition (Kettenregel). Seien f : D̃ ⊆ Rm → X, und g : D ⊆ Rn → Rm
beide stetig differenzierbar, wobei g(D) ⊆ D̃.
Dann ist auch f ◦ g : D ⊆ Rn → X stetig differenzierbar, und es gilt für x ∈ D5
d( f ◦ g)(x) = d f g(x) dg(x) ,
wobei die rechte Seite die Hintereinanderausführung von zuerst dg(x) und dann
d f g(x) ist.
Beweis. Laut Voraussetzung haben wir für a, a + b ∈ D̃, b , 0 gemäß (10.5)
f (a + b) = f (a) + d f (a)b + kbk∞ ǫ̃(b) ,
und falls x, x + z ∈ D, z , 0
g(x + z) = g(x) + dg(x)z + kzk∞ ǫ(z) .
Wegen limb→0 ǫ̃(b) = 0 und limz→0 ǫ(z) = 0 können wir durch ǫ(0) = 0 und ǫ̃(0) = 0
diese beiden Funktion so fortsetzen, dass sie bei z = 0 bzw. b = 0 stetig sind.
Ist nun a = g(x) und b so, dass a + b = g(x + z), so folgt aus der ersten Gleichung
und durch Einsetzen der zweiten
f g(x + z) =
f g(x) + d f g(x) g(x + z) − g(x) + k g(x + z) − g(x) k∞ ǫ̃ g(x + z) − g(x) =
f g(x) + d f g(x) dg(x)z + kzk∞ ǫ(z) +
dg(x)z + kzk∞ ǫ(z) ∞ ǫ̃ g(x + z) − g(x) =
f g(x) + d f g(x) dg(x) z + kzk∞ γ(z) ,
wobei
1
γ(z) = d f g(x) (ǫ(z)) + k dg(x)(
z) + ǫ(z) k∞ ǫ̃ g(x + z) − g(x) .
kzk∞
Wir haben
kγ(z)k ≤ kd f (g(x))k · kǫ(z)k∞ + (kdg(x)k + kǫ(z)k∞ ) kǫ̃ g(x + z) − g(x) k .
Wegen ǫ̃(0) = 0 und der Stetigkeit von ǫ̃ bei 0 folgt aus limz→0 g(x+z)−g(x) = 0, dass
limz→0 ǫ̃ g(x + z) − g(x) = 0 (vgl. Proposition 6.1.4), und somit auch γ(z) → 0, z → 0.
Wir haben also d( f ◦ g)(x) = d f (g(x)) dg(x) gezeigt. Um mit Hilfe von Satz
10.1.16 sicher zu gehen, dass f ◦ g ∈ C 1 , brauchen wir noch die Stetigkeit von
x 7→ d f (g(x)) dg(x). Diese folgt aber aus Korollar 9.2.9.
❑
beachte, dass wegen dg(x) ∈ L(Rn , Rm ) und d f g(x) ∈ L(Rm , X) diese Hintereinanderausführung
linearer Abbildungen Sinn macht.
5 Man
10.1. PARTIELLE ABLEITUNGEN
75
10.1.20 Bemerkung. Ist v ∈ Rn , so folgt unmittelbar aus Proposition 10.1.19 zusammen
mit Korollar 10.1.6 und Definition 10.1.8, dass
∂
∂
f ◦ g(x) = d f g(x)
g(x) ,
∂v
∂v
wobei rechts die Anwendung der linearen Abbildung d f g(x) ∈ L(Rm , X) auf den
∂
g(x) ∈ Rm steht. Man beachte, dass die rechte Seite nicht dasselbe ist wie
Vektor ∂v
∂
∂
∂v f g(x) ∂v g(x). Letzterer Ausdruck mach nicht einmal Sinn.
10.1.21 Bemerkung. Hat man n = 1 in Proposition 10.1.19, dh. D ⊆ R, so gilt dg(t) =
g′ (t), wenn man g′ (t) mit der linearen Abbildung ξ 7→ ξ ·g′ (t) aus L(R, Rm ) identifiziert,
siehe Fakta 10.1.9, 1. Entsprechendes gilt für ( f ◦ g)′ (t). Also liest sich die Kettenregel
in dem Fall als
( f ◦ g)′ (t) = d f g(t) g′ (t), t ∈ D ,
(10.6)
wobei rechts die Anwendung der linearen Abbildung d f g(t) auf den Vektor g′ (t)
steht.
10.1.22 Bemerkung (*). Wir nehmen im Fall n = 1 nun sogar an, dass g ∈ C 1 (I) für
irgendein, nicht notwendigerweise offenes Intervall I ⊆ R mit g(I) ⊆ D̃. Dann gilt
(10.6) sogar für in I enthaltene Randpunkte t von I.
Dazu setze man g auf ein etwas größeres Intervall J := I ∪ (t − ǫ, t + ǫ) durch
g(s) := (s − t)g′ (t) + g(t) für s ∈ J \ I fort. Man überprüft unmittelbar, dass g ∈ C 1 (J),
und dass für eine hinreichend kleine Wahl von ǫ > 0 auch g(J) ⊆ D̃. Die Kettenregel
angewandt auf g|(t−ǫ,t+ǫ) ergibt dann (10.6).
10.1.23 Beispiel. Als Beispiel wollen wir sogenannte Parameterintegrale betrachten.
Sei h : (a, b) × (c, d) → R stetig und so, dass die Ableitung nach der ersten Variablen
für alle (s, t) ∈ (a, b) × (c, d) existiert, und dass
h1 (s, t) =
∂
h(s, t) ,
∂s
ebenfalls stetig ist. Weiters seien α, β : (a, b) → (c, d) zwei stetig differenzierbare
Funktionen. Wir wollen die Ableitung der Funktion
Z β(s)
h(s, t) dt
I(s) :=
α(s)
berechnen. Dazu wenden wir die eben gewonnene Kettenregel auf
Z η
3
T
h(ζ, t) dt
f : (c, d) × (c, d) × (a, b) ⊆ R → R, (ξ, η, ζ) 7→
ξ
und
g : (a, b) ⊆ R → R3 , s 7→ (α(s), β(s), s)T
an. Die partiellen Ableitungen von f sind nach dem Hauptsatz und nach Korollar 8.7.12
stetig, und die Matrixdarstellung von d f (x) ist (x = (ξ, η, ζ)T )
Z η
∂f
∂h
∂f
∂f d f (x) =
(x),
(x),
(x) = (−h(ζ, ξ), h(ζ, η),
(ζ, t) dt) .
∂ξ
∂η
∂ζ
ξ ∂ζ
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
76
Auch dg(s) = (α′ (s), β′ (s), 1)T ist stetig, und die Kettenregel ergibt
I ′ (s) = d( f ◦ g)(s) = d f (g(s))dg(s) =
α′ (s)
′
∂h
∂s (s, t) dt
β (s) =
1
Z
β(s)
∂h
h(s, β(s))β′ (s) − h(s, α(s))α′ (s) +
(s, t) dt .
α(s) ∂s
R β(s)
−h(s, α(s)) h(s, β(s)) α(s)
Siehe Fakta 10.1.9, 1.
10.1.24 Lemma. Sei D ⊆ Rn offen und f : D → X stetig differenzierbar. Sind mit x, y
auch alle Punkte auf ihrer Verbindungsgeraden in D, also tx + (1 − t)y ∈ D, t ∈ [0, 1],
so folgt
k f (x) − f (y)k ≤ max k d f tx + (1 − t)y k · kx − yk∞ .
t∈[0,1]
Beweis. Wegen der Stetigkeit von t 7→ tx + (1 − t)y ist das Bild der kompakten Menge [0, 1] ebenfalls kompakt. Somit hat die stetige Funktion z 7→ kd f (z)k darauf ein
Maximum.
Die Funktion g(t) := f x + t(y − x) ist nach Lemma 10.1.5 stetig differenzierbar
mit g′ (t) = d f x + t(y − x) (y − x). Nach dem Hauptsatz (9.16) gilt
Z 1
k f (y) − f (x)k = kg(1) − g(0)k = d f x + t(y − x) (y − x) dt ≤
0
sup k d f x + t(y − x) (y − x) k ≤ max k d f x + t(y − x) k · ky − xk∞ .
t∈[0,1]
t∈[0,1]
❑
Aus Lemma 10.1.24 folgt unmittelbar
10.1.25 Korollar. Gilt mit der Notation aus Lemma 10.1.24 die Ungleichung
kd f (x)k ≤ C für alle x ∈ M, wobei M ⊆ D konvex ist, so gilt
k f (x) − f (y)k ≤ Ckx − yk∞ , x, y ∈ M .
Insbesondere ist dann f auf M gleichmäßig stetig.
10.1.26 Bemerkung. Man kann auch Funktionen f : D → X betrachten, wo D offene
Teilmenge eines allgemeinen Banachraumes Y ist, und sich fragen, ob und in welcher
Hinsicht f differenzierbar ist.
Es stellt sich heraus, dass der Zugang aus Definition 10.1.13 der zweckmäßigste
ist. Man spricht dann von der sogenannten Fréchet-Differenzierbarkeit. Mit fast den
selben Beweisen wie hier angegeben bleiben alle Behauptungen ab Definition 10.1.13
bis zum Ende dieses Abschnitt richtig.
Eine Ausnahme stellt Satz 10.1.16 dar. Es gilt nur, dass aus der Differenzierbarkeit
folgt, dass alle Richtungsableitungen existieren. Die Umkehrung gilt nicht, da es in
dieser allgemeinen Situation kein Analogon zu Lemma 10.1.5 gibt.
10.2. HÖHERE ABLEITUNGEN
77
10.2 Höhere Ableitungen
Sei f definiert auf einer offenen Menge D ⊆ Rn mit Werten in einem Banachraum X
– man stelle sich für X z.B. wieder R vor –, und existiere für alle x ∈ D die partielle
∂f
∂f
Ableitung ∂x
(x). Dann ist ∂x
selbst eine Funktion
i
i
∂f
: D → X.
∂xi
Also macht es Sinn, von der Differenzierbarkeit dieser Funktion zu sprechen. Existiert
an einer Stelle x ∈ X die Ableitung
!
∂ ∂f
(x) ,
∂x j ∂xi
so spricht man von einer zweiten Ableitung von f oder von der Ableitung zweiter
2
f
Ordnung und schreibt kürzer ∂x∂j ∂x
, d.h. f wird zuerst nach xi differenziert und dann
i
nach x j . Höhere partielle Ableitungen definiert man induktiv fortfahrend:
Ist schon definiert, was partielle Ableitungen k-ter Ordnung sind, und ist
(i1 , i2 , . . . , ik+1 ) ein (k + 1)-Tupel von Indizes il ∈ {1, . . . , n}, so setzt man
!
∂k+1 f
∂
∂k f
(x) ,
(x) :=
∂xik+1 ∂xik · · · ∂xi1
∂xik+1 ∂xik · · · ∂xi1
falls diese Ableitungen existieren und sprechen von Ableitungen (k + 1)-ter Ordnung.
10.2.1 Definition. Sei f : D ⊆ Rn → X definiert auf der offenen Menge D und sei
k ∈ N. Wir sagen, f ist k-mal stetig differenzierbar auf D, und schreiben f ∈ C k oder
f ∈ C k (D), falls alle partiellen Ableitungen k-ter Ordnung von f auf ganz D existieren
und stetig sind.
Falls f ∈ C k (D) für alle k ∈ N, so schreibt man f ∈ C ∞ oder f ∈ C ∞ (D) für diesen
Sachverhalt.
10.2.2 Bemerkung. Bezeichnet man mit C(D) die Menge aller stetigen Funktionen auf
D, dann gilt
C(D) ⊇ C 1 (D) ⊇ . . . ⊇ C k (D) ⊇ C k+1 (D) ⊇ . . . .
Die erste Inklusion gilt wegen Korollar 10.1.14. Zu den anderen Inklusionen:
Ist f ∈ C k+1 (D), dann existieren alle partiellen Ableitungen (k + 1)-ter Ordnung.
Nach der induktiven Definition der (k + 1)-ten partiellen Ableitungen müssen auch alle
k
f
eine solche. Dann
partiellen Ableitungen k-ter Ordnung existieren. Sei g = ∂xi ∂···∂x
i
k
1
existieren alle partiellen Ableitungen von g und sind stetig, d.h. g ∈ C 1 . Wegen C 1 (D) ⊆
C(D) folgt, dass g selbst stetig ist; vgl. Korollar 10.1.14. Also gilt f ∈ C k (D).
10.2.3 Satz (Satz von Schwarz). Sei f ∈ C 2 (D), D ⊆ Rn , und seien i, j ∈ {1, . . . , n},
2
2
sodass ∂x∂i ∂xf j und ∂x∂j ∂xf j auf ganz D existieren und stetig sind. Dann gilt
∂2 f
∂2 f
=
.
∂xi ∂x j ∂x j ∂xi
Allgemeiner gilt für f ∈ C k (D), dass es bei der Bildung einer partiellen Ableitung
höchstens k-ter Ordnung nicht darauf ankommt, in welcher Reihenfolge differenziert
wird.
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
78
Beweis. Sei x ∈ D und δ > 0, so dass Uδ (x) ⊆ D, wobei wir Rn mit k.k∞ versehen. Nach
dem Hauptsatz der Differential- und Integralrechnung (siehe (9.16)) gilt für |ξ|, |η| < δ
Z ξ
∂f
f (x + ξei + ηe j ) − f (x + ηe j ) =
(x + ζei + ηe j ) dζ .
0 ∂xi
2
f
(x + ζei + ηe j ), und daher stetig in
Die Ableitung des Integranden nach η ist gerade ∂x∂j ∂x
i
ζ und η. Somit können wir (9.19) – siehe auch Korollar 8.7.12 – anwenden und erhalten
bei der Ableitung obiger Gleichung nach η
Z ξ 2
∂f
∂ f
∂f
(x + ξei + ηe j ) −
(x + ηe j ) =
(x + ζei + ηe j ) dζ .
∂x j
∂x j
∂x
j ∂xi
0
Leiten wir nun nach ξ ab, so folgt mit dem Hauptsatz
∂2 f
∂2 f
(x + ξei + ηe j ) =
(x + ξei + ηe j ) .
∂xi ∂x j
∂x j ∂xi
Die Behauptung für Funktionen f ∈ C k (D) folgt aus dem Bewiesenen leicht durch
vollständiger Induktion, wenn man sich vor Augen hält, dass sich jede Permutation als
Hintereinanderausführung von Transpositionen schreiben lässt.
❑
10.2.4 Bemerkung. Ist (i1 , i2 , . . . , ik ) ∈ {1, . . . , n}k ein k-Tupel, und bezeichnet α j (∈
N ∪ {0}) für j = 1, . . . , n die Anzahl der m ∈ {1, . . . , k} mit im = j, so gilt für ein
f ∈ C k (D) wegen Satz 10.2.3
∂k f
∂k f
(x) = α1
(x) ,
∂xik · · · ∂xi1
∂x1 · · · ∂xαn n
(10.7)
α
wobei ∂x j j für α j mal nach x j abgeleitet steht. Offenbar gilt k = α1 + · · · + αn .
Man überzeugt sich z.B. durch eine Induktion nach n davon, dass es dabei genau
k!
α1 ! · · · · · αn !
viele k-Tupel (i1 , i2 , . . . , ik ) gibt, die im obigen Sinne dasselbe n-Tupel (α1 , . . . , αn ) ∈
(N ∪ {0})n erzeugen. Für den Ausdruck in (10.7) schreibt man auch
D(α1 ,...,αn ) f (x) .
Die n-Tupelen (α1 , . . . , αn ) ∈ (N ∪ {0})n nennt man auch Multiindizes.
10.2.5 Beispiel. Wir betrachten abermals die Funktion T : D → R2 definiert durch
!
!
r
r cos t
T
=
.
t
r sin t
mit D = R+ × R ⊆ R2 . Um die höheren Ableitungen dieser speziellen Funktion zu
studieren, bietet es sich an, die Bildmenge R2 als C zu betrachten, da man dann
!
r
T
= r · exp(it)
t
10.2. HÖHERE ABLEITUNGEN
79
schreiben kann. Die höheren partiellen Ableitungen sind dann
!
π r cos t + l π2
∂l
r
l
T
= r · i exp(it) = r · exp i(t + l )
,
2
∂tl t
r sin t + l π2
!
cos t + l π2
∂1+l
r
l
,
T
= i exp(it) ∂r ∂tl t
sin t + l π2
und
!
∂k+l
r
T
= 0, k ≥ 2 .
∂rk ∂tl t
Für f ∈ C 1 (D) haben wir die Ableitung d f : D → L(Rn , X) so definiert, dass
d f (x)v genau die Richtungsableitung von f in Richtung v ist. Siehe Lemma 10.1.5.
Ist nun f ∈ C k (D) und sind v1 = (µ1,1 . . . , µ1,n )T , . . . , vk = (µk,1 . . . , µk,n )T Richtungsvektoren, so erhält man mit Lemma 10.1.5
X
∂f
∂f
(x) =
(x) .
µ1,l
∂v1
∂xl
l=1
n
Wendet man Lemma 10.1.5 nochmals an, so folgt
n
n
n
X
X
X
∂ ∂f
∂2 f
∂ ∂
f (x) =
(x) =
(x) .
µ1,l
µ1,l1
µ2,l2
∂v2 ∂v1
∂v2 ∂xl
∂xl1 ∂xl2
l=1
l =1
l =1
1
2
Macht man das nun insgesamt k-mal, so sieht man, dass die k-malige Hintereinanderausführung der Richtungsableitungen nach v1 bis vk existiert und mit
n
X
∂
∂
∂k f
...
f (x) =
(x)
µ1,l1 · · · · · µk,lk
∂vk
∂v1
∂xl1 . . . ∂xlk
l ,...,l =1
1
(10.8)
k
übereinstimmt.
10.2.6 Definition. Für eine mindestens k-mal stetig differenzierbare Funktion f : D →
X mit einem offenen D ⊆ Rn und einem Banachraum X und für x ∈ D sowie v1 , . . . , vk ∈
Rn bezeichnen wir mit d k f (x)(v1 , . . . , vk ) den Ausdruck in (10.8).
10.2.7 Fakta.
1. Im Falle k = 1 stimmt dieser gerade mit der Ableitung d f (x)v1 überein.
2. Für allgemeines k ∈ N ist dk f (x)(v1 , . . . , vk ) linear in jedem Argument, d.h.
dk f (x)(v1 , . . . , αvl + βv′l , . . . , vk ) =
αdk f (x)(v1 , . . . , vl , . . . , vk ) + βd k f (x)(v1 , . . . , v′l , . . . , vk ) .
Außerdem ist dk f (x)(v1 , . . . , vk ) symmetrisch in v1 , . . . , vk , hängt daher nicht von
der Reihenfolge der Richtungsvektoren ab. Das folgt unmittelbar aus Satz 10.2.3
und (10.8).
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
80
3. Somit ist dk f (x) : Rk×n → X eine symmetrische, multilineare Abbildung, sodass
dk f (x)(v1 , . . . , vk ) gerade ∂v∂k . . . ∂v∂1 f (x) ist. Wir nennen sie die k-te Ableitung
von f an der Stelle x.
4. Im Fall n = 1, also D ⊆ R, gilt dk f (x)(v1 , . . . , vk ) = v1 · · · · · vk f (k) (x).
5. Für einen späteren Gebrauch stellen wir noch heraus, dass wenn y, v ∈ Rn mit
y + tv ∈ D, t ∈ [0, 1], die k-te Ableitung der Funktion6
φ(t) = f (y + tv), t ∈ [0, 1] ,
∂
∂
. . . ∂v
f (y + tv) = dk f (y + tv)(v, . . . , v) ist. Ordnen wir für
nichts anderes als ∂v
v = v1 = · · · = vk die Ableitungen ∂xl in (10.8) nach aufsteigendem l wie in
(10.7), so erhalten wir mit v = (µ1 , . . . , µn )T
φ(k) (t) = dk f (y + tv)(v, . . . , v) =
X
µα1 1 · · · · · µαn n
(α1 ,...,αn )∈(N∪{0})n
α1 +···+αn =k
∂k f
k!
(y + tv) .
α1 ! · · · · · αn ! ∂xα1 1 · · · ∂xαn n
(10.9)
10.2.8 Beispiel. Wir betrachten die Funktion T aus Beispiel 10.2.5. Die lineare Abbil
dung dT (r, t)T haben wir in (10.4) berechnet.
Für m ∈ N, m ≥ 2 folgt aus Beispiel 10.2.5 mit x1 = r, x2 = t, µ j,1 = ρ j , µ j,2 = τ j
!
!!
!
!
2
X
∂m T
ρ
r
r ρ1
=
,..., m =
µ1,l1 · · · · · µm,lm
dm T
t τ1
τm
∂xl1 . . . ∂xlk t
l1 ,...,lm =1
!
!
∂m
∂m
r
r
T
=
T
+
τ
·
·
·
·
·
τ
1
m m
t
∂t
∂r ∂tm−1 t
cos t + (m − 1) π2
r cos t + m π2
+ τ1 · · · · · τm
.
(ρ1 τ2 . . . τm + · · · + τ1 . . . τm−1 ρm ) sin t + (m − 1) 2π
r sin t + m π2
(ρ1 τ2 . . . τm + · · · + τ1 . . . τm−1 ρm )
Man erkennt unmittelbar aus (10.4), dass diese Beziehung auch für m = 1 richtig ist.
Wir können nun die mehrdimensionale Taylorsche Formel herleiten.
10.2.9 Satz (Taylorsche Formel). Sei f : D (⊆ Rn ) → X und q ∈ N, sodass f ∈
C q+1 (D). Weiters sei y ∈ D fest und x ∈ D so, dass die gesamte Strecke von y bis x in D
liegt7 . Dann gilt
f (x) = f (y) +
q
X
1 l
d f (y)(x − y, . . . , x − y) + Rq (x) ,
|
{z
}
l!
l=1
l−mal
wobei sich das Restglied Rq schreiben lässt als
1
Rq (x) =
q!
Z1
0
6 An
(1 − t)q · dq+1 f (1 − t)y + tx (x − y, . . . , x − y) dt .
|
{z
}
den Randpunkten ist die Ableitung einseitig zu verstehen.
stimmt immer, wenn D konvex ist.
7 Das
(q+1)−mal
(10.10)
10.2. HÖHERE ABLEITUNGEN
81
Beweis. Wir entwickeln die Funktion (h = x − y)
φ(t) = f (y + th), t ∈ [0, 1]
nach Taylor, wie in (9.20). Also gilt
φ(1) = φ(0) +
q
X
φ(l) (0)
l=1
l!
+
Z1
(1 − t)q (q+1)
φ
(t) dt .
q!
0
Aus (10.9) wissen wir, dass φ(l) (t) = dl f (y + th)(h, . . . , h), woraus unmittelbar die
behauptete Entwicklung folgt.
❑
10.2.10 Bemerkung. Den Ausdruck
pq (x) = f (y) +
q
X
1 l
d f (y)(x − y, . . . , x − y)
|
{z
}
l!
l=1
l−mal
nennt man das q-te mehrdimensionale Taylorsche Polynom der Funktion f an der Anschlussstelle y. Mit (10.9) folgt die Darstellung
pq (x) =
X
(α1 ,...,αn )∈(N∪{0})n
α1 +···+αn ≤q
1
∂α1 +···+αn f
(y) ,
(x1 − y1 )α1 · · · · · (xn − yn )αn α1
α1 ! · · · · · αn !
∂x1 · · · ∂xαn n
wenn wir für α1 + · · · + αn = 0 den entsprechenden Summanden als f (y) interpretieren. Wir sehen insbesondere, dass pq (x) tatsächlich ein Polynom in den n Variablen
x1 , . . . , xn mit Werten in X vom Grad ≤ q ist; vgl. Beispiel 10.2.11.
10.2.11 Beispiel. Setzen wir für α ∈ (N ∪ {0})n und x = (x1 , . . . , xn )T ∈ Rn
|α| = α1 + · · · + αn , α! = α1 ! · · · · · αn !, xα = xα1 1 · · · · · xαn n ,
und sind cα für |α| ≤ m Koeffizienten aus einem Banachraum X, so heißt die Funktion
f : Rn → X
X
f (x) =
xα cα
α∈(N∪{0})n
|α|≤m
Polynom in den Variablen x1 , . . . , xn vom Grad ≤ m mit Werten in X.
Durch Ausmultiplizieren erkennt man leicht, dass für jedes feste y ∈ Rn mit f auch
x 7→ f (x − y) ein Polynom vom Grad ≤ m ist.
Ebenfalls unschwer überprüft man, dass für α, β ∈ (N ∪ {0})n mit β ≤ α, dh. β1 ≤
α1 , . . . , βn ≤ αn , 8
α!
∂|β|(x 7→ xα )
(y) =
yα−β ,
(10.11)
∂xβ
(α − β)!
gilt, wobei α − β ∈ (N ∪ {0})n komponentenweise berechnet wird. Falls β j > α j für
|β|
α
mindestens ein j ∈ {1, . . . , n}, so gilt ∂ (x7∂x→β x ) ≡ 0.
8 Hier
und im Rest des Beispiels ist
∂|β| f
∂xβ
eine Kurzschreibweise für
∂β1 +···+βn f
β
β
∂x11 ···∂xnn
.
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
82
Wenden wir für ein festes y ∈ Rn Satz 10.2.9 auf ein Polynom f vom Grad ≤ m und
q ≥ m an, so folgt
X
1 ∂|α| f
(y) ,
f (x) =
(x − y)α
α! ∂xα
α∈(N∪{0})n
|α|≤m
da
|α|
∂ f
∂xα
= 0 für |α| > m und damit insbesondere wegen
dq+1 f (1 −t)y+tx (x − y, . . . , x − y) =
|
{z
}
(q+1)−mal
X
(x−y)α
α∈(N∪{0})n
|α|=q+1
(q + 1)! ∂q+1 f
((1 −t)y+tx) = 0
α!
∂xα
auch das Restglied verschwindet.
|α|
Für y = 0 folgt aus (10.11), dass cα = α!1 ∂∂xαf (0), womit die Koeffizienten cα eindeutig durch die Funktionswerte von f auf jeder beliebig kleinen offenen Kugel um die
Null bestimmt sind.
10.2.12 Proposition. Mit der Notation aus Satz 10.2.9 gilt:
(i) Ist C ≥ 0 so, dass sich die partiellen Ableitungen q + 1-ter Ordnung abschätzen
lassen durch
∂q+1 f
(10.12)
(u) ≤ C ,
∂xl1 · · · ∂xlq+1
für alle l1 , . . . , lq+1 ∈ {1, . . . , n} und u auf der Strecke von y bis x, dann gilt
kRq (x)k ≤ C
nq+1
kx − ykq+1
∞ .
(q + 1)!
(ii) Ist D konvex und f sogar in C ∞ (D) und gilt (10.12) für alle q und alle u ∈ D, so
konvergiert die Reihe
f (y) +
∞
X
1 l
d f (y)(x − y, . . . , x − y)
|
{z
}
l!
l=1
l−mal
(gleichmäßig auf beschränkten Teilmengen von D) gegen f (x).
Beweis.
(i) Aus (10.12) folgt wegen (10.8) für u = (1 − t)y + tx und h = (h1 , . . . , hn )T ∈ Rn
n
X
∂q+1 f
q+1
q+1
(u) ≤ Cnq+1 khk∞ .
k d f (u)(h, . . . , h) k ≤
|hl1 | . . . |hlq+1 | · ∂xl1 . . . ∂xlq+1 l1 ,...,lq+1 =1
Für h = x − y folgt daraus mit (10.10)
1
kRq (x)k ≤
q!
Z1
0
(1 − t)q · kd f q+1 (1 − t)y + tx (x − y, . . . , x − y)k dt ≤
nq+1 q+1
khk∞
C
q!
Z1
0
(1 − t)q dt = C
nq+1
khkq+1
∞ .
(q + 1)!
10.3. EXTREMWERTE
83
q+1
n
(ii) Bei fest gewähltem y konvergiert (q+1)!
kx − ykq+1 und damit Rq (x) für jedes x
gegen 0. In der Tat geht diese Konvergenz für x in beschränkten Teilmengen von
D gleichmäßig von statten.
❑
10.2.13 Beispiel. Sei T : D → R2 wie in Beispiel 10.2.5, wobei aber jetzt D : (0, α)×R
für irgend ein festes α ∈ R+ , α > 1. Wendet man Satz 10.2.9 für den Punkt y = (r, t)T =
(1, 0) an, so erhalten wir mit x − y = (ρ, τ)T aus Beispiel 10.2.8
T (x) = T (y) +
q
X
1 l
d T (y)(x − y, . . . , x − y) + Rq (x) =
|
{z
}
l!
l=1
l−mal
!
!
!!
q
π
π
1 X1
l−1 cos(l − 1) 2
l cos l 2
=
+
lρτ
+τ
+ Rq (x) .
0
sin(l − 1) 2π
sin l π2
l!
(10.13)
l=1
In Beispiel 10.2.5 haben wir insbesondere gesehen, dass (10.12) für C = α und k.k =
k.k∞ erfüllt ist. Also konvergiert die entsprechende Reihe in (10.13) gegen T (x).
10.3 Extremwerte
Wir haben im ersten Semester in Definition 7.2.1 definiert, was es bedeutet, dass eine
reellwertige Funktion f : D → R – D ist Teilmenge eines metrischen Raumes – in
einem Punkt x ∈ D ein lokales Maximum (lokales Minimum) hat:
∃δ > 0 : ∀t ∈ Uδ (x) : f (t) ≤ (≥) f (x) .
Ist D offene Teilmenge von R, und ist f differenzierbar in einem lokalen Maximum
(Minimum) x, so haben wir in Satz 7.2.2 gesehen, dass dann f ′ (x) = 0. Wir wollen
diese Tatsache nun für auf D ⊆ Rn definierte Funktionen herleiten.
10.3.1 Satz. Sei x ein lokales Extremum, d.h. Maximum oder Minimum, von
f : D ⊆ Rn → R. Falls für v ∈ Rn die Richtungsableitung
f (x + tv) − f (x)
∂f
(x) = lim
,
t→0
∂v
t
bei x existiert, so ist diese gleich Null. Für f ∈ C 1 folgt d f (x) = 0.
Beweis. Sei v ∈ Rn ein beliebiger Vektor. Betrachte die Funktion φ(t) = f (x + tv). Da
D offen ist, ist φ in einer Umgebung von 0 definiert, und wegen unserer Voraussetzung
ist auch φ bei 0 differenzierbar und hat die Ableitung φ′ (0) = ∂∂vf (x). Da x ein relatives
Extremum von f ist, hat auch φ ein relatives Extremum bei 0. Somit gilt φ′ (0) = 0.
Für f ∈ C 1 ist d f (x) derart definiert, dass d f (x)v = ∂∂vf (x) für alle v ∈ Rn . Es folgt
also d f (x) = 0.
❑
1
Für f ∈ C (D) ist also d f (x) = 0 eine notwendige Bedingung für ein Extremum.
Punkte mit d f (x) = 0 heißen stationäre Punkte. Wie im eindimensionalen ist d f (x) = 0
aber nicht hinreichend. Um dieses Problem genauer studieren zu können, wollen wir
folgende Sprechweise einführen.
84
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
10.3.2 Definition. Sei D ⊆ Rn offen und liege f : D → R in C k (D). Für gerades k heißt
die k-te Ableitung dk f (x) : Rk×n → R von f im Punkt x positiv definit bzw. positiv
semidefinit, wenn d k f (x)(h, . . . , h) > 0 bzw. d k f (x)(h, . . . , h) ≥ 0 für alle 0 , h ∈ Rn .
Entsprechend definiert man negativ definit bzw. negativ semidefinit.
10.3.3 Bemerkung. Ist n = 1, d.h. f : D ⊆ R → R, so gilt ja d k f (x)(h, . . . , h) =
hk · f (k) (x), und man sieht, dass d k f (x) genau dann positiv definit (semidefinit) ist, wenn
f (k) (x) > (≥) 0. Entsprechendes gilt für den negativ definiten (semidefiniten) Fall.
10.3.4 Bemerkung. Der für die meisten Anwendungen relevante Fall ist k = 2. Hier
lassen sich die Definitheitseigenschaften von d2 f (x) mit Mitteln der Linearen Algebra
betrachten. In diesem Fall ist d2 f (x) : R2×n → R eine symmetrische Bilinearform:
d2 f (x)(u, v) =
n
X
ul1 vl2
l1 ,l2 =1
u1
...
∂2 f
(x)
∂x1 ∂x.1
..
un
∂2 f
∂xn ∂x1 (x)
...
∂2 f
(x) =
∂xl1 ∂xl2
..
.
...
2
∂2 f
v1
∂x1 ∂xn (x)
∂2 f
∂xn ∂xn
.
. .
.
(x) vn
Diese symmetrische n × n-Matrix H f (x) = ∂x∂i ∂xf j (x) heißt auch Hesse-Matrix.
Aus der Linearen Algebra ist bekannt, dass die Bilinearform positiv definit (semidefinit) ist, wenn alle Eigenwerte λ1 , . . . , λn – diese sind nicht notwendigerweise
paarweise verschieden – von H f (x) größer (größer gleich) Null sind. Entsprechendes
gilt für den negativen Fall.
Weiters ist diese Bilinearform positiv definit genau dann, wenn alle Hauptminoren9
von H f (x) größer Null sind. Entsprechend ist sie genau dann negativ definit, wenn die
Hauptminoren nicht verschwinden und abwechselndes Vorzeichen beginnend mit −
haben.
Für den Beweis des folgenden Satzes benötigen wir ein Lemma.
10.3.5 Lemma. Für k, n ∈ N sei ω : Rk×n → R eine symmetrische, multilineare
Abbildung. Gilt ω(v, . . . , v) = 0 für alle v ∈ Rn , so verschwindet ω(v1 , . . . , vk ) für alle
v1 , . . . , vk ∈ Rn .
Beweis. Für k = 1 ist nichts zu beweisen. Für größere k’s zeigen wir die Aussage durch
vollständige Induktion nach k. Ist k = 2, so gilt für beliebige v, w ∈ Rn
0 = ω(v + w, v + w) = ω(v, v) + ω(v, w) + ω(w, v) + ω(w, w) = ω(v, w) + ω(w, v) .
Also gilt ω(v, w) = −ω(w, v) und wegen der Symmetrie auch ω(v, w) = ω(w, v) und
damit ω(v, w) = 0.
Ist k > 2, so seien wieder v, w ∈ Rn beliebig. Weiters sei λ ∈ R. Nun gilt wegen der
Symmetrie
ω(v + λw, . . . , v + λw) =
9 Hauptminoren einer quadratischen Matrix (µ )
i j i, j=1,...,n sind die Determinanten aller Untermatrizen
(µi j )i, j=1,...,k für k = 1, . . . , n.
10.3. EXTREMWERTE
ω(v, . . . , v) +
85
k−1
X
j=1
λj
!
k
ω(v, . . . , v, w, . . . , w) + λk ω(w, . . . , w) .
| {z } | {z }
j
j−mal
(k− j)−mal
Für feste v, w ∈ Rn und variablem λ steht links immer Null und rechts ein Polynom
in λ, dessen Koeffizienten somit alle verschwinden müssen. Für j = k − 1 gilt daher
insbesondere
ω(v, . . . , v , w) = 0 ,
| {z }
(k−1)−mal
n
und zwar für alle v, w ∈ R . Somit erfüllt für festes w ∈ Rn die offensichtlich symmetrische und multilineare Abbildung
(v1 , . . . , vk−1 ) 7→ ω(v1 , . . . , vk−1 , w)
die Voraussetzungen unseres Lemmas für k − 1 anstatt für k. Nach Induktionsvoraussetzung verschwindet diese multilineare Abbildung für alle v1 , . . . , vk−1 ∈ Rn . Da w
zwar fest, aber beliebig war, verschwindet auch ω.
❑
10.3.6 Satz. Für ein offenes D ⊆ Rn sei f : D → R, f ∈ C r (D) mit r ∈ N, und sei
x ∈ D mit d f (x) = 0, . . . , d q−1 f (x) = 0, d q f (x) , 0, wobei q ≤ r. Dann gilt
(i) Hat f ein lokales Maximum bei x, so ist q gerade und dq f (x) ist negativ semidefinit.
(ii) Ist q gerade und dq f (x) negativ definit, so hat f ein lokales Maximum bei x.
(iii) Hat f ein lokales Minimum bei x, so ist q gerade und dq f (x) ist positiv semidefinit.
(iv) Ist q gerade und dq f (x) positiv definit, so hat f ein lokales Minimum bei x.
Beweis.
(i) Sei x ein relatives Maximum von f . Dann existiert ein δ > 0, sodass
f (y) ≤ f (x) für alle y ∈ Uδ (x) .
Für ein v ∈ Rn \ {0} definieren wir φv (t) = f (x + tv), |t| <
δ
kvk ,
und sehen wie in
Satz 10.3.1, dass φv bei Null ein lokales Maximum hat. Außerdem ist φ(k)
v (0) =
(0) = 0.
d f k (x)(v, . . . , v), k = 1, . . . , q. Also φ′v (0) = · · · = φ(q−1)
v
Nach Voraussetzung ist dq f (x) , 0, und wegen Lemma 10.3.5 muss
dq f (x)(v, . . . , v) , 0 in zumindest eine Richtung v. Also folgt φ(q)
v (0) , 0. Wäre
q ungerade, so wäre nach Korollar 7.4.7 die Zahl 0 aber kein lokales Extremum
von φv .
(q)
Damit ist q gerade. Wäre nun dq f (x) nicht negativ semidefinit, d.h. φv (0) =
dq f (x)(v, . . . , v) > 0 in zumindest eine Richtung v, so folgt wieder aus Korollar
7.4.7, dass 0 ein lokales Minimum von φv ist. Somit ist 0 lokales Minimum und
lokales Maximum. Also muss φv auf einem hinreichend kleinen Intervall um 0
konstant sein, was aber φv(q) (0) = 0 implizieren würde.
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
86
(ii) Sei q gerade und d q f (x) negativ definit. Nun gibt es ein δ > 0, sodass dq f (w)
ebenfalls negativ definit ist für alle w ∈ Uδ (x).
Um das einzusehen, nehme man das Gegenteil an. Dann gibt es zu jedem m ∈ N
ein xm , kxm − xk∞ < m1 , sodass dq f (xm ) nicht negativ definit ist. Es gibt daher ein
0 , hm ∈ Rn mit dq f (xm )(hm , . . . , hm ) ≥ 0. Wegen
dq f (xm )
hm
hm 1
q
,...,
=
q d f (xm )(hm , . . . , hm ) ≥ 0
khm k∞
khm k∞
khm k∞
können wir annehmen, dass die hm immer khm k∞ = 1 erfüllen – also in der
abgeschlossenen und beschränkten Teilmenge
K1 (0) \ U1 (0) = {h : khk∞ = 1} ⊆ Rn
liegen. Da diese Menge nach Korollar 5.2.9 kompakt ist, gilt hm( j) → h, j → ∞,
für eine Teilfolge und für ein h ∈ K1 (0) \ U1 (0).
Somit konvergieren die Komponenten von hm( j) gegen die entsprechenden
k
f
Komponenten von h und alle partiellen Ableitungen ∂xl ∂...∂x
(xm( j) ) gegen
l
1
∂k f
∂xl1 ...∂xlk
q
k
(x). Wegen (10.8) konvergiert dann auch d q f (xm( j) )(hm( j) , . . . , hm( j) ) gegen d f (x)(h, . . . , h), und wir erhielten d q f (x)(h, . . . , h) ≥ 0 im Widerspruch zur
Voraussetzung.
Nach Satz 10.2.9 hat man für w ∈ Uδ (x)
f (w) = f (x) +
q−1
X
1 l
d f (x)(w − x, . . . , w − x) + Rq−1 (w) = f (x) + Rq−1 (w) ,
|
{z
}
l!
l=1
l−mal
1
Rq−1 (w) =
(q − 1)!
Z1
0
d f q ((1 − t)x + tw)(w − x, . . . , w − x)(1 − t)q−1 dt .
|
{z
}
q−mal
Wegen der Wahl von δ ist der Integrand aber < 0. Also gilt f (w) = f (x)+Rq (w) <
f (x) für w , x, und somit ist x ein lokales Maximum.
Die Aussagen (iii) und (iv) zeigt man genauso wie (i) und (ii).
❑
Sucht man ein lokales Extremum einer überall differenzierbaren Funktion, so
braucht man nur unter jenen Punkten x mit d f (x) = 0 zu suchen. In der Praxis wird
man die Gleichung d f (x) = 0 aber meistens nicht explizit nach x auflösen können.
10.3.7 Bemerkung. Ob ein lokales Maximum (Minimum) einer Funktion f : D → R
mit offenem D ⊆ Rn ein globales Maximum (Minimum) ist, ist im Allgemeinen
nicht leicht zu beantworten. Zum Beispiel hat g : R2 → R, g(ξ, η)T = (ξ2 +
η2 )2 − 2(ξ2 + η2 ), bei (0, 0)T ein lokales Maximum aber kein globales Maximum, da
limk(ξ,η)T k→+∞ g(ξ, η)T = +∞.
Ist aber f stetig fortsetzbar auf den Abschluss c(D) von D und ist D beschränkt,
so muss wegen daraus resultierenden Kompaktheit von c(D) die Funktion f auf c(D)
mindestens ein globales Maximum (Minimum) y haben. Diese Maximum (Minimum)
kann nun in D oder im Rand c(D) \ D liegen. Im ersten Fall ist dann y klarerweise auch
10.3. EXTREMWERTE
87
Maximum (Minimum) von f |D und somit eine Lösung der Gleichung d f (x) = 0. Im
zweiten Fall ist y ein globales Maximum (Minimum) von f |c(D)\D .
Um also von einer gegebenen Funktion f : c(D) → R mit beschränktem und offenem D die globalen Maxima (Minima) auf c(D) zu suchen, sind zunächst alle Lösungen
der Gleichung d f (x) = 0 auf D zu suchen. Dann sucht man alle Maxima (Minima) von
f |c(D)\D auf dem Rand c(D) \ D und vergleicht schließlich die Funktionswerte an allen
erhaltenen Punkten von c(D).
10.3.8 Beispiel. Wir betrachten die Funktion
(
R2 → R
f :
.
(ξ1 , ξ2 )T 7→ 1 − ξ12 − ξ22
Der Graph dieser Funktion, daher alle Punkte (ξ1 , ξ2 , ξ3 )T ∈ R3 mit ξ3 = f (ξ1 , ξ2 )T , ist
ein Paraboloid.
ξ3
ξ2
ξ1
Abbildung 10.2: Graph der Funktion ξ3 = f
ξ 1
ξ2
für ξ12 + ξ22 ≤ 1
Die Ableitung von f berechnet sich als
d f (x) =
∂f
∂x1
(x),
∂f
(x) = (−2ξ1 , −2ξ2 ) .
∂x2
Schreibt man y ∈ R2 in Koordinaten (η1 , η2 )T bezüglich der kanonischen Basis,
so ergibt sich
d f (x)y = −2ξ1 η1 − 2ξ2 η2 .
Der einzige Punkt x mit d f (x) = (0, 0) ist offenbar x = (0, 0)T . Die zweiten
partiellen Ableitungen von f sind
∂2 f
∂2 f
∂2 f
∂2 f
=
= 0,
= −2,
= −2 .
2
∂x1 ∂x2 ∂x2 ∂x1
∂x1
∂x22
Die zweite Ableitung ist daher gleich
d2 f (x)(h, h) = −2h21 − 2h22 ,
und sie ist offenbar stets < 0, also negativ definit. Insbesondere ist (0, 0)T ein
lokales Maximum. Ist 0 nun auch ein globales Maximum? Das Bild, das man
von der Fläche hat, legt das sicherlich nahe. Aber wie lässt sich das zeigen?
88
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
Eine Möglichkeit ist, festzustellen, dass für (ξ1 , ξ2 )T , (0, 0)T sicherlich
f (ξ1 , ξ2 )T = 1 − (ξ12 + ξ22 ) < 1 = f (0, 0)T .
Man kann auch nach einem (globalen, lokalen) Minimum von f fragen. Ein
globales Minimum gibt es offensichtlich nicht, da z.B. für festes ξ2 und für
|ξ1 | → +∞ der Ausdruck f (ξ1 , ξ2 )T nach −∞ strebt.
Man kann aber z.B. fragen, ob f |D mit D = {(ξ1 , ξ2 )T ∈ R2 : k(ξ1 , ξ2 )T k2 < 1}
ein lokales oder globales Minimum y = (η1 , η2 )T hat. Das ist aber auch nicht der
Fall, denn dann wäre dort d f (y) = 0, was aber nur für y = 0 der Fall ist.
Nun kann man z.B. auch fragen, ob f |D mit D = {(ξ1 , ξ2 )T ∈ R2 : k(ξ1 , ξ2 )T k2 ≤
1} ein Minimum y = (η1 , η2 )T hat. Man beachte, dass man hier nicht unmittelbar
die Resultate dieses Abschnittes anwenden kann, da ja D nicht offen ist. In der
Tat ist D kompakt, und somit muss f auf D mindestens ein Minimum haben.
Ein solches kann aber nicht in D liegen, da es dann ein Minimum von f |D wäre,
von dem wir ja wissen, dass es diese nicht gibt.
Also muss y ∈ D \ D = T = {(ξ1 , ξ2 )T ∈ R2 : k(ξ1 , ξ2 )T k2 = 1}. Aber f ist auf T
konstant. Also sind alle y ∈ T Minima von f |D .
Wollen wir die Extrema von f auf dem abgeschlossenen Dreieck ∆ mit den Eckpunkten (0, 1)T , (2, 0)T , (2, 2)T finden, so gehen wir folgendermaßen vor.
Zunächst existieren zumindest ein Minimum und zumindest ein Maximum von
f auf ∆, da f stetig und ∆ abgeschlossen, beschränkt und somit kompakt ist.
Das Innere ∆o von ∆ ist eine offene Teilmenge von R2 , welche (0, 0)T nicht
enthält. Also kann ein Extremum von f nicht in ∆o liegen, da d f dort verschwinden müsste. Wir haben aber schon gesehen, dass (0, 0)T der einzige Punkt ist, wo
d f verschwindet.
Also müssen die Extrema am Rand ∂∆, dh. in der Vereinigung der drei Seiten
!
!
!
2α
2α
2
a={
: α ∈ [0, 1] }, b = {
: α ∈ [0, 1] }, c = {
: α ∈ [0, 1] } ,
1−α
1+α
2α
suchen. Die Extrema von f auf a, b und c sind aber die Extrema von
!
2α
fa (α) = f
= 1 − 4α2 − 1 + 2α − α2 = −5α2 + 2α,
1−α
!
2α
fb (α) = f
= 1 − 4α2 − 1 − 2α − α2 = −5α2 − 2α, bzw.
1+α
!
2
fc (α) = f
= 1 − 4 − 4α2 = −3 − 4α2 ,
2α
jeweils auf [0, 1].
Für fa gilt fa′ (α) = −10α + 2 und fa′′ (α) = −10. Also ist α = 51 ein lokales
Maximum mit fa ( 51 ) = 51 . Für die Randpunkte von [0, 1] gilt fa (0) = 0, fa (1) =
−3. Insgesamt hat fa auf [0, 1] ein Maximum bei α = 15 und ein Minimum bei
α = 1.
Die Funktion fb ist auf [0, 1] offensichtlich monoton fallend. Also ist α = 0 ein
Maximum mit fb (0) = 0 und α = 1 ein Minimum mit fb (1) = −7.
10.4. ÜBUNGSBEISPIELE
89
Die Funktion fc ist auf [0, 1] auch monoton fallend. Also ist α = 0 ein Maximum
mit fc (0) = −3 und α = 1 ein Minimum mit fc (1) = −7.
Somit hat f auf ∂∆ das Minimum bei (2, 2)T mit Wert f (2, 2)T = −7 und das
2 Maximum bei 1−5 2 mit Wert 15 .
5
10.4 Übungsbeispiele
10.1 Man betrachte die Funktion f : R2 → R2 , f (ξ, η)T = (ξ 2 η sin ξη, ξ2 +ηξ2 +1 )T . Berechne
alle partielle Ableitungen sowie d f (x), x = (ξ, η)T ∈ R2 . Schließlich berechne man die
Richtungsableitung ∂∂vf (x) für v = (1, 1)T und (1, −1)T .
10.2 Sei A ∈ Rn×n symmetrisch, dh. AT = A, und betrachte die Abbildung f (x) = xT Ax von
Rn nach R. Man zeige, dass d f (x) = 2(Ax)T , und berechne die Richtungsableitung entlang
von v = x.
10.3 Sei p ∈ N, p ≥ 2 und f : R p \ {0} → R definiert durch f (x) = ln kxk2 im Falle p = 2 und
1
1
T
f (x) =
p−2 wenn p > 2. Man zeige, dass grad f (x) = (d f (x)) = kxk p x.
(2−p)kxk2
2
10.4 Man betrachte die Funktion f aus Beispiel 6.1.11 und zeige, dass in (0, 0)T alle partiellen
Ableitungen existieren, sie aber in (0, 0)T nicht differenzierbar ist. Berechnen Sie von f
auch alle höheren Ableitungen zweiter Ordnung an allen Punkten der Ebene , (0, 0)T .
10.5 Man betrachte die Funktion g : R2 \ {(x, 0) : x ≤ 0} → R+ × (−π, π),
p
!
ξ 2 + η2
g(ξ, η)T =
,
arg(ξ + iη)
p
wobei das Argument arg(ξ + iη) ∈ (−π, π) so definiert ist, dass f ( ξ 2 + η2 , arg(ξ + iη))T =
(ξ, η)T , wobei f (r, φ)T = (r cos φ, r sin φ)T .
Berechne alle partiellen Ableitungen sowie dg(x) und det dg(x), x ∈ R2 .
Hinweis: Stellen Sie arg(x + iy) mit Hilfe des Arcustangens bzw. Arcuscotangens quadrantenweise dar!
R α2
10.6 Berechnen Sie I ′ (α), wobei I : R → R gegeben ist durch I(α) = − exp(α) cos(αt2 ) dt.
10.7 Sei h : (− π2 , π2 ) → R definiert durch h(t) = (cos t)sin t man berechne h′ auf 2 Arten. Zuerst
direkt und dann mittels Anwendung der Kettenregel auf f (t) = (cos t, sin t) und g(ξ, η)T =
ξ η . Man gebe auch geeignete offene Definitionsbereiche von f und g an!
10.8 Funktionen f : D → C R2 , D ⊆ C R2 , die stetig differenzierbar sind, und die
zusätzlich die sogenannten Cauchy-Riemannschen Differentialgleichungen
∂u
∂v
∂u
∂v
(x, y) =
(x, y),
(x, y) = − (x, y) ,
∂x
∂y
∂y
∂x
wobei u(x, y) = Re f (x + iy) und v(x, y) = Im f (x + iy), erfüllen, nennt man holomorph.
Man zeige, dass z 7→ exp(z), z 7→ z holomorph auf D = C und z 7→ 1z holomorph auf
D = C\{0} sind, indem man die Cauchy-Riemannschen Differentialgleichungen nachprüft!
10.9 Man betrachte die Funktion f (x, y)T = x3 − 2x2 y2 + 4xy3 + y4 + 10. Berechne alle partiellen
k+l
Ableitungen ∂x∂k ∂yl f (x, y) mit k, l = 1, 2, sowie dm f (x, y)T (v1 , . . . , vm ) für m = 1, 2. Schließlich berechne man das Taylorsche Polynom (in x, y) ohne Restglied mit q = 2 gemäß Satz
10.2.9.
10.10 Man berechne alle partiellen Ableitungen 1., 2. und 3. Grades von f (x, y, z) = sin(3x +
yz), sowie dm f (x, y, z)(v1 , . . . , vm ) für m = 1, 2. Schließlich berechne man das Taylorsche
Polynom (in x, y, z) ohne Restglied mit q = 3 gemäß Satz 10.2.9.
90
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
10.11 Sei p ∈ N, p ≥ 2 und f : R p \ {0} → R definiert durch f (x) = ln kxk2 im Falle p = 2 und
1
f (x) =
p−2 wenn p > 2.
(2−p)kxk2
Man zeige, dass f harmonisch ist! Weiters zeige man, dass für ein festes x0 ∈ R p auch
x 7→ f (x − x0 ), x ∈ R p \ {x0 } harmonisch ist.
Dabei heißt eine zweimal stetig differenzierbare Funktion h : B → X harmonisch, wenn
∆h(x) :=
∂2
∂2
h(x) + · · · +
h(x) = 0
∂x1 ∂x1
∂xm ∂xm
für alle x ∈ B. Hier ist X ein Banachraum und B ⊆ Rm offen.
10.12 Bestimmen Sie für
f (x, y)T = xe
√
y
die Ableitung in Richtung des Vektors v = (cos ϕ, sin ϕ)T . Für welchen Winkel ϕ wird
∂ f (2,3)T
maximal? Bestimmen Sie ebenfalls die Ableitung entlang der Parabel p(t) :=
∂v
(x(t), y(t))T = (t, t2 )T , dh. die Richtungsableitung von f in Richtung p′ (t) im Punkt p(t).
10.13 Sei h : (− 2π , π2 ) → R definiert durch h(t) = (cos t)sin t man berechne h′ auf 2 Arten. Zuerst
direkt und dann mittels Anwendung der Kettenregel auf f (t) = (cos t, sin t)T und g(ξ, η)T =
ξ η . Man gebe auch geeignete offene Definitionsbereiche von f und g an!
10.14 Lineare Regression: Seien (xi , yi ) ∈ R2 , i = 1, . . . , n endlich viele, fest vorgegebene Messdaten, wobei zumindest zwei verschiedene xi auftreten. Man bestimme eine linear Funktion
f (x) = kx + d so, dass der quadratische Abstand
n
X
( f (xi ) − yi )2
i=1
P
minimal wird! Man betrachte also F(k, d) = ni=1 ( f (xi ) − yi )2 als Funktion von (k, d) und
finden Sie die Kandidaten für lokale Extrema!
Begründen Sie auch, warum der erhaltene Kandidat Tatsächlich ein Minimum ist, indem
Sie u.a. limk(k,d)T k→+∞ F(k, d) = +∞ zeigen.
p
√
Hinweis zum letzten Teil: Zunächst ist F(k, d) ≥ (kx1 + d + y1 )2 + (kx2 + d + y2 )2 .
Zeigen Sie nun, dass k((kx1 + d + y1 ), (kx2 + d + y2 ))T k2 ≥ k(kx1 + d, kx2 + d)T!k2 − k(y1 , y2 )T k2
x 1
.
und dann kA−1 k · k((kx1 + d), (kx2 + d))T k2 ≥ k(k, d)T k2 , wobei A = 1
x2 1
10.15 Sei D ⊆ Rn offen und beschränkt. c(D) sei der Abschluss von D in Rn . Weiters sei f :
c(D) → R stetig und so, dass f |D : D → R aus C 2 ist mit ∆ f (x) ≥ 0 für alle x ∈ D, wobei
∆ f (x) :=
∂2
∂2
f (x) + · · · +
f (x) .
∂x1 ∂x1
∂xn ∂xn
Zeigen Sie, dass f : c(D) → R in c(D) und f |c(D)\D : c(D) \ D → R in c(D) \ D jeweils
mindestens eine Maximalstelle haben und dass maxt∈c(D) f (t) = maxt∈c(D)\D f (t).
Hinweis: Angenommen x0 ∈ D wäre Maximalstelle mit f (x0 ) > maxt∈c(D)\D f (t) =: η.
OBdA. sei f (x0 ) > 0 > η angenommen. Betrachte eine Maximalstelle von g(x) = f (x) +
c(kx − x0 k22 − d) für x ∈ c(D) mit geeignet gewählten c, d > 0, sodass kx − x0 k22 − d < 0 für
x ∈ c(D) \ D und sodass g(x0 ) > 0! Warum geht das? Wo können die Maximalstellen x1
von g nur liegen und was gilt für ∆g(x1 )?
10.16 Wo besitzt f : R2 → R ein globales bzw. lokales Extremum, wobei
f (x, y) = x3 ex−y .
10.17 Wo besitzt f : [0, 1] × [0, 1] → R ein globales Extremum, wobei
f (x, y)T = 3x2 − 2(y + 1)x + 3y − 1 .
Hinweis: Kandidaten für Extrema in (0, 1) × (0, 1) erfüllen d f (x, y) = 0. Kandidaten in
(0, 1) × {0} erfüllen ∂∂xf (x, 0) = 0 usw. .
10.4. ÜBUNGSBEISPIELE
91
10.18 Wie im letzten Beispiel, aber für f : {(x, y)T ∈ R2 : x2 + y2 ≤ 1} → R
f (x, y)T = 8x2 − 2yx + 3y − 1 .
10.19 Bestimmen Sie für die Funktion
f (z) = z(z − 2) − 2 Re z ,
z = x + iy ∈ C ,
alle lokalen Extrema der Funktion | f (z)| sowie deren Typ, dh. Maximum, Minimum.
10.20 Bestimmen Sie alle (lokalen) Extrema der Funktionen f, g : R2 → R. Sind diese (lokale)
Minima bzw. Maxima?
2 −y2
f (x, y) = (x2 + y2 )ex
, g(x, y) = (y2 − x2 )(y2 − 2x2 ) .
10.21 Sei K = {(cos t, sin t)T ∈ R2 : t ∈ R} und A = {(ξ, η)T : 2ξ + 3η = 10}. Man zeige,
dass K kompakt und A abgeschlossen ist. Weiters bestimme man x ∈ K, y ∈ A so, dass
d(x, y) = d(A, K); vgl. Übungsbeispiel 5.19. Schließlich zeige man, dass x normal auf die
Gerade A steht.
92
KAPITEL 10. ABLEITUNGEN NACH MEHREREN VARIABLEN
Kapitel 11
Wegintegrale
11.1 Wege
Wege im Rn sind der Anschauung nach etwas eindimensionales.
11.1.1 Definition.
Ein Weg γ im Rn ist eine Abbildung von einem Intervall [a, b] nach Rn . Ist γ
stetig, so sprechen wir von einem stetigen Weg.
Dabei heißen zwei Wege γ : [a, b] → Rn und γ̃ : [ã, b̃] → Rn äquivalent, falls
sie Umparametrisierungen voneinander sind, d.h. falls es eine streng monoton
wachsende Bijektion α : [a, b] → [ã, b̃] gibt, sodass γ̃ ◦ α = γ.1 Wir schreiben
auch γ ∼ γ̃ dafür.
Ist γ ein Weg, so sei
γ− : [a, b] → Rn der Weg [a, b] → Rn , t 7→ γ(a + b − t), also der in der
Gegenrichtung durchlaufene Weg.
Sind γ1 : [a1 , b1 ] → Rn , γ2 : [a2 , b2 ] → Rn zwei (stetige) Wege mit b1 = a2 und
γ1 (b1 ) = γ2 (a2 ), so sei γ1 ⊕ γ2 : [a1 , b2 ] → Rn die (stetige) Funktion mit
(γ1 ⊕ γ2 )|[a1 ,b1 ] = γ1 , (γ1 ⊕ γ2 )|[a2 ,b2 ] = γ2 .
−−−−
Sind x0 , . . . , xm Punkte aus Rn , so bezeichnet −
x−0−→
x1 , −
x−1−→
x2 , . . . , −
x−m−1
x→
m den stetigen
n
Weg γ : [0, m] → R definiert durch γ(t) = x j−1 + (t − ( j − 1))(x j − x j−1 ), wenn
t ∈ [ j − 1, j], j = 1, . . . , m. Solche Wege nennt man Polygonzüge.
Im Fall m = 1 nennt man γ(t) = tx1 + (1 − t)x0 die gerade Strecke von x0 nach
x1 und schreibt auch −
x−0−→
x1 dafür.
11.1.2 Beispiel. Sind x0 , . . . , xm Punkte aus Rn , und definiert man die Wege x]
j−1 x j :
[ j−1, j] → Rn , j = 1, . . . , m, durch x]
j−1 x j (t) := x j−1 +(t−( j−1))(x j −x j−1 ), t ∈ [ j−1, j],
−−−−−
→
so sind offenbar x]
j−1 x j und x j−1 x j äquivalent, und
−−−−
xg
]xm = −
x−0−→
x1 , −
x−1−→
x2 , . . . , −
x−m−1
x→
0 x1 ⊕ · · · ⊕ xm−1
m.
1 Wegen Korollar 6.5.3 ist eine solche Bijektion α stetig. Umgekehrt ist eine stetige Bijektion α : [a, b] →
[ã, b̃] entweder streng monoton wachsend oder streng monoton fallend, vgl. Lemma 6.5.5.
93
KAPITEL 11. WEGINTEGRALE
94
11.1.3 Fakta.
1. Da mit α auch α−1 eine streng monoton wachsende Bijektion ist, ist ∼ eine Äquivalenzrelation. Man sieht auch unmittelbar, dass γ ∼ γ′ ⇔ γ− ∼ γ′ −.
2. Ist γ : [a, b] → Rn ein Weg und ist α(t) = a + t(b − a), so ist γ äquivalent zu
γ ◦ α : [0, 1] → Rn , also äquivalent zu einem Weg mit Parametermenge [0, 1].
3. Das Bild eines stetigen Weges ist als stetiges Bild einer kompakten und zusammenhängenden Menge wieder kompakt und zusammenhängend, siehe Proposition 6.1.13 und Proposition 6.2.4.
4. Man könnte glauben, dass das Bild eines stetigen Weges den Weg schon bestimmt. Das ist aber nicht der Fall, wenn man nur an ein Geradenstück denkt,
das man zuerst in die Hin- und dann in die Rückrichtung durchläuft.
5. Das Bild eines stetigen Weges kann auch ganz unerwartet aussehen. Man kann
z.B. einen Weg in R2 konstruieren, der [0, 1] × [0, 1] als Bild hat.
Um einem Weg eine Länge ℓ(γ) zuzuordnen, liegt es nahe, das zuerst bei den ein−
fachsten Arten von Wegen, nämlich den geraden Strecken γ = →
xy mit x, y ∈ Rn zu
tun:
ℓ(γ) := kx − yk2 .
Die Länge eines beliebigen Weges γ : [a, b] → Rn approximiert man dadurch, dass
man eine beliebige Zerlegung Z = {ξ j : j = 0, . . . , n(Z)} von [a, b] wie in Definition
8.1.2 nimmt und die Länge des dazugehörigen Polygonzugs
−−−−−−−−→
−−−−−−−−−−−−−−−→
γ(ξ0 )γ(ξ1 ), . . . , γ(ξn(Z)−1 )γ(ξn(Z) )
(11.1)
nämlich
L(Z) :=
n(Z)
X
j=1
kγ(ξ j ) − γ(ξ j−1 )k2
berechnet. Die Länge ist dann das Supremum von L(Z) über die Menge Z aller
Zerlegungen Z von [a, b]:
ℓ(γ) := sup L(Z) .
(11.2)
Z∈Z
Der Fall ℓ(γ) = +∞ kann dabei auftreten. Ist jedoch ℓ(γ) < +∞, so spricht man von
einem rektifizierbaren Weg.
11.1.4 Fakta.
1. Ist γ : [0, 1] → Rn , γ(t) = tx1 + (1 − t)x0 eine gerade Strecke, so gilt für eine
beliebige Zerlegung Z
L(Z) =
n(Z)
X
j=1
k(ξ j − ξ j−1 )(x1 − x0 )k2 = kx − yk2 .
Also ist unser Zugang zur Weglänge in sich konsistent.
11.1. WEGE
a = ξ0 ξ1
95
ξ2
ξ3 ξ4 ξ5
ξ6
ξ7 = b
:Z
γ(ξ7 )
γ
γ(ξ1 )
γ(ξ0 )
γ(ξ6 )
γ(ξ2 )
γ(ξ3 )
γ(ξ4 )
γ(ξ5 )
γ([a, b])
Abbildung 11.1: Polygonzüge zur Approximation der Weglänge
2. Da Z bezüglich ⊆ eine gerichtete Menge ist, und da wegen der Dreiecksungleichung, kγ(w) − γ(u)k2 ≤ kγ(w) − γ(v)k2 + kγ(v) − γ(u)k2, aus Z1 ⊆ Z2 folgt, dass
L(Z1 ) ≤ L(Z2 ), kann man ℓ(γ) als Limes eines monoton wachsenden Netzes
über (Z, ⊆) schreiben.
3. Ist γ nicht konstant, also ∃ t1 , t2 : γ(t1 ) , γ(t2 ), so folgt
L({a, b, t1 , t2 }) ≥ kγ(t1 ) − γ(t2 )k2 > 0, und damit ℓ(γ) > 0. Ist dagegen γ konstant,
so folgt sofort aus der Definition ℓ(γ) = 0. In jedem Fall gilt
ℓ(γ) ≥ L({a, b}) = kγ(b) − γ(a)k2
4. Da sich die Zerlegungen der Definitionsbereiche von äquivalenten Wegen bijektiv entsprechen, überzeugt man sich leicht, dass äquivalente Wege die selbe
Länge haben. Genauso leicht sieht man ℓ(γ) = ℓ(−γ).
5. Aus der Monotonie (vgl. 2) folgt für ein endliches A ⊆ [a, b] unmittelbar, dass
auch
ℓ(γ) = sup L(Z) .
Z∈Z, Z⊇A
Da ZA := {Z ∈ Z : Z ⊇ A} mit ⊆ zu einer gerichteten Menge wird, und da L(Z)
monoton von Z abhängt, gilt wegen (5.10) und Bemerkung 5.3.9 auch
ℓ(γ) = lim L(Z) .
Z∈ZA
6. Seien γ1 : [a1 , b1 ] → Rn , γ2 : [a2 , b2 ] → Rn zwei Wege mit b1 = a2 und
γ1 (b1 ) = γ2 (a2 ), sodass γ1 ⊕ γ2 : [a1 , b2 ] → Rn definiert ist. Weiters seien Z1 , Z2
bzw. Z die Menge aller Zerlegungen von [a1 , b1 ], [a2 , b2 ] bzw. [a1 , b2 ].
Für A = {a2 } und Z ∈ ZA gilt offenbar Z ∩ [a1 , b1 ] ∈ Z1 und Z ∩ [a2 , b2 ] ∈ Z2 ,
wobei
L(γ1 ⊕ γ2 , Z) = L(γ1 , Z ∩ [a1 , b1 ]) + L(γ2 , Z ∩ [a2 , b2 ]) .
KAPITEL 11. WEGINTEGRALE
96
Wegen Z j = {Z ∩ [a j , b j ] : Z ∈ ZA } gilt für j = 1, 2 auch
ℓ(γ j ) = sup L(γ j , Z ∩ [a j , b j ]) = lim L(γ j , Z ∩ [a j , b j ]) ,
Z∈ZA
Z∈ZA
womit (siehe 5)
ℓ(γ1 ⊕ γ2 ) = lim L(γ1 ⊕ γ2 , Z) =
Z∈ZA
lim L(γ1 , Z ∩ [a1 , b1 ]) + lim L(γ2 , Z ∩ [a2 , b2 ]) = ℓ(γ1 ) + ℓ(γ2 )
Z∈ZA
Z∈ZA
in dem Sinn, dass die linke Seite genau dann endlich ist, wenn die rechte Seite
endlich ist, dh. wenn ℓ(γ1 ) < +∞ und ℓ(γ2 ) < +∞.
7. Sei Z eine Zerlegung von [a, b], und betrachte den in (11.1) erwähnten Polygonzug p : [0, n(Z)] → Rn ,
p(t) = γ(ξ j−1 ) +
t − ξ j−1
γ(ξ j ) − γ(ξ j−1 ) , t ∈ [ξ j−1 , ξ j ] .
ξ j − ξ j−1
(11.3)
Da dieser Weg eine Zusammensetzung von geraden Strecken – genauer eine Zusammensetzung von zu geraden Strecken äquivalenten Wegen – ist, folgt aus
dem letzten Punkt, dass ℓ(p) = L(Z).
Obwohl sich ℓ(γ) für ein Funktion γ : [a, b] → R, also im Fall n = 1, nur schwer
als Weglänge interpretieren lässt, ist dieser Fall doch von Bedeutung. In der Tat sagt
man, dass γ : [a, b] → R von beschränkter Variation ist, wenn ℓ(γ) < +∞, und nennt
dann ℓ(γ) die Variation der Funktion γ.
11.1.5 Lemma. Ist γ : [a, b] → Rn ein rektifizierbarer Weg, so ist die Funktion ℓ(x) :=
ℓ(γ|[a,x] ), x ∈ [a, b] monoton wachsend. Ist γ bei x rechtsstetig (linksstetig, stetig), so
ist auch ℓ dort rechtsstetig (linksstetig, stetig)2 .
Beweis. x 7→ ℓ(γ|[a,x] ) ist offensichtlich monoton wachsend; vgl. Fakta 11.1.4, 6. Sei
γ in einem Punkt x ∈ [a, b) rechtsstetig. Somit gibt es zu gegebenem ǫ > 0 ein δ > 0,
sodass kγ(x) − γ(s)k2 < ǫ für alle s ∈ [x, x + δ].
Wegen ℓ(γ|[x,b] ) ≤ ℓ(γ) < +∞ gibt es zu gegebenem ǫ > 0 eine Zerlegung Z0 von
[x, b], sodass
ℓ(γ|[x,b] ) − ǫ < L(γ|[x,b] , Z0 ) ≤ ℓ(γ|[x,b] ) .
Da die L(Z) monoton von Z abhängen, können wir Z0 so wählen, dass die erste Stützstelle ξ rechts von x einen Abstand kleiner oder gleich δ hat.
Offenbar ist Z0 ∩ [ξ, b] eine Zerlegung von [ξ, b], wobei L(γ|[ξ,b] , Z0 ∩ [ξ, b]) =
L(γ|[x,b] , Z0 ) − kγ(ξ) − γ(x)k2 . Also gilt
L(γ|[x,b] , Z0 ) − kγ(ξ) − γ(x)k2 ≤ ℓ(γ|[ξ,b] )
und daher
ℓ(γ|[x,ξ] ) ≤ ℓ(γ|[x,ξ] ) + ℓ(γ|[ξ,b] ) − (L(γ|[x,b] , Z0 ) − kγ(ξ) − γ(x)k2 ) =
kγ(ξ) − γ(x)k2 + ℓ(γ|[x,b] ) − L(γ|[x,b] , Z0 ) < 2ǫ .
2 Rechtsstetig
bedeutet lim s→x+ ℓ(s) = ℓ(x) und linksstetig lim s→x− ℓ(s) = ℓ(x)
11.1. WEGE
97
Also ist ℓ(γ|[x,ξ] ) < 2ǫ. Wegen der Monotonie gilt auch ℓ(γ|[a,s] ) − ℓ(γ|[a,x] ) = ℓ(γ|[x,s] ) ≤
ℓ(γ|[x,ξ] ) < 2ǫ, wenn s ∈ [x, ξ].
Die Linksstetigkeit zeigt man analog.
❑
Konkret ausrechnen lässt sich die Weglänge für stetig differenzierbare Wege.
11.1.6 Satz. Falls γ ∈ C 1 [a, b], so ist γ rektifizierbar, und ℓ(x) ist differenzierbar mit
der Ableitung kγ′ (x)k2 . Dabei gilt
Z b
kγ′ (x)k2 dx .
ℓ(γ) =
a
Beweis. Wegen dem Hauptsatz der Differential- und Integralrechnung sowie (9.13) gilt
Z ξ
Z ξj
j ′
kγ(ξ j ) − γ(ξ j−1 )k2 = kγ′ (t)k2 dt .
γ (t) dt ≤
ξ j−1
ξ
j−1
2
Rb
′
Also L(Z) ≤ a kγ (t)k2 dt für jede Zerlegung Z von [a, b], und damit ℓ(γ) ≤
Rb
kγ′ (t)k2 dt.
a
Für a ≤ x < y ≤ b gilt
Z y
kγ(y) − γ(x)k2 ≤ ℓ(γ|[x,y] ) ≤
kγ′ (t)k2 dt .
x
Dividiert man diese Ungleichung durch (y − x) und lässt x → y streben, so konvergiert
in der
die linke und die rechte Seite gegen kγ′ (y)k2 ; also auch der Ausdruck ℓ(y)−ℓ(x)
y−x
Mitte, und damit ℓ′ (y)− = kγ′ (y)k2 . Lässt man y → x streben, so sieht man genauso
ℓ′ (x)+ = kγ′ (x)k2 , und insgesamt ℓ′ (x) = kγ′ (x)k2 , x ∈ [a, b], wobei wir an den
Rändern die jeweiligen einseitigen Grenzwerte meinen.
❑
11.1.7 Definition. Eine Abbildung f : [a, b] → X mit einem Banachraum X heißt
stückweise stetig differenzierbar , falls es eine Zerlegung a = t0 < · · · < tn = b von
[a, b] gibt, sodass jede Einschränkung f |(t j−1 ,t j ) eine stetig differenzierbare Fortsetzung
auf [t j−1 , t j ] hat.
Die Funktion γ : [a, b] → Rn ist offenbar stetig und stückweise stetig differenzierbar (vgl. Definition 11.1.7), wenn es eine Zerlegung Z = {ξ j }n(Z)
j=0 gibt, sodass
γ|[ξ j−1 ,ξ j ] ∈ C 1 [ξ j−1 , ξ j ] für j = 1, . . . , n(Z). Wendet man Satz 11.1.6 insgesamt n(Z)mal auf γ|[ξ j−1 ,ξ j ] , j = 1, . . . , n(Z) an, so erhalten wir
11.1.8 Korollar. Ist γ : [a, b] → Rn ein stetiger und stückweise stetig differenzierbarer
Rb
Weg, so ist dieser rektifizierbar mit ℓ(γ) = a kγ′ (x)k2 dx.
11.1.9 Beispiel. Man betrachte den Weg (siehe Definition 6.8.12, Beispiel 10.1.10)
!
cos s
γ(s) =
∈ R2 , s ∈ [0, 2π] .
sin s
Für ein t ∈ [0, 2π] gilt nach Satz 11.1.6
!
Z
Z t − sin s ℓ(γ|[0,t] ) =
cos s ds =
0
2
0
t
p
sin2 s + cos2 s ds = t .
KAPITEL 11. WEGINTEGRALE
98
γ(t) ≃ exp(it)
sin t
t
Also ist t genau die Weglänge
des Bogens γ|[0,t] .
−1
0
cos t
1
Das erklärt, warum man für ein w ∈ C ≃ R2 dargestellt in Polarkoordinaten (siehe
Definition 6.8.12), dh. w = r exp(it) = r(cos t + i sin t), die Zahl t auch als Bogenlänge
bezeichnet.
11.1.10 Bemerkung. Ist γ : [a, b] → Rn ein rektifizierbarer und stetiger Weg, so wissen
wir nun, dass ℓ das Intervall [a, b] monoton wachsend und surjektiv auf [0, ℓ(γ)] abbildet. Ist ℓ sogar bijektiv, so ist β = γ ◦ ℓ−1 ein zu γ äquivalenter Weg, sodass die Länge
des Weges β|[0,t] genau t ist.
Ist ℓ nicht injektiv, so kann man für t ∈ [0, ℓ(γ)], β(t) := γ(x) setzen, wobei x eine
Zahl aus [a, b] ist, sodass ℓ(x) = t. Im Fall, dass ℓ(x1 ) = t = ℓ(x2 ), hat γ|[x1 ,x2 ] Weglänge
Null und ist somit konstant. Also ist γ(x1 ) = γ(x2 ) und β somit wohldefiniert. Offenbar
gilt γ = β ◦ ℓ. Aus der Kompaktheit von [0, ℓ(γ)] folgert man aus γ = β ◦ ℓ leicht die
Stetigkeit von β.
Also ist β auch in diesem Fall ein zu γ fast äquivalenter“ Weg, sodass die Länge
”
des Weges β|[0,t] genau t ist.
11.1.11 Bemerkung (*). Bisher haben wir bei der Behandlung von Wegen und
Weglängen nirgends verwendet, dass γ in den Rn mit der k.k2 -Norm hinein abbildet.
Wir haben die euklidische Norm nur verwendet, weil sie dem als natürlich empfundenen Längenbegriff entspricht.
In der Tat kann man genauso ℓ(γ) definieren, wenn γ eine beliebige Funktion von
[a, b] in einen Banachraum (X, k.k) ist.
Es gelten dann dieselben Eigenschaften, die wir eben aufgezählt haben, und ist
ℓ(γ) < +∞, so spricht man von γ als einer Funktion von beschränkter Variation.
Äquivalente Normen k.k und |k.k|, d.h. αk.k ≤ |k.k| ≤ βk.k, induzieren zwar verschiedene Längenbegriffe, aber diese sind dennoch vergleichbar:
αℓk.k (γ) ≤ ℓ|k.k| (γ) ≤ βℓk.k (γ) .
Versieht man etwa Rn mit der Norm k.k∞ oder k.k1 , so erhält man für ein und dieselbe
Funktion verschiedene Längenbegriffe.
11.2 Wegintegrale
11.2.1 Beispiel. Wir betrachten ein Objekt im Gravitationsfeld einer Punktmasse, und
wollen die Arbeit berechnen, die verrichtet wird wenn man das Objekt von einer Positi-
11.2. WEGINTEGRALE
99
on zu einer anderen verschiebt. Dabei denken wir uns diese Punktmasse im Nullvektor
des R3 .
Das Newtonsche Gravitationsgesetz besagt, dass sich die Gravitationskraft umgekehrt proportional zum Quadrat ihres Abstandes r zur Punktmasse verhält – also durch
C r12 mit einer Konstante C berechnet werden kann. Vernachlässigen wir diese Konstante, und zerlegt man die Kraft, die auf einen Punkt x = (ξ, η, ζ)T ∈ R3 wirkt, in ihre
Komponenten, so erhält man den Kraftvektor
ξ
1
F(x) = − 3 η .
kxk2 ζ
Verschiebt man nun einen Punkt P von x zu einer sehr nahen Position x + h, so ist die
Arbeit, die verrichtet wird, wegen der Formel Arbeit = Kraft × Weg“ ungefähr gleich
”
− F(x), h = −F(x)T h .
Sei nun P ein Punkt in der Position x0 , und werde P längs einer Kurve γ in die Position x1 verschoben. Sei γ gegeben in Parameterdarstellung γ : [0, 1] → R3 , γ(0) =
x0 , γ(1) = x1 , und sei vorausgesetzt, dass γ hinreichend glatt ist – etwa stetig und
stückweise stetig differenzierbar. Wir zerlegen die Kurve in kleine Abschnitte. Sei also
0 = t0 < t1 < t2 < . . . < tn−1 < tn = 1. Wird γ durch den Polygonzug mit Ecken in γ(ti )
approximiert, dann berechnet sich die verrichtete Arbeit ungefähr durch
ω≈
n
X
i=1
−F(γ(ti )
T
γ(ti ) − γ(ti−1 ) .
Wir werden unten sehen, dass dieser Ausdruck konvergiert, wenn man die Approximation immer genauer macht. Für diesen Grenzwert werden wir
Z
−F(x)T dx ,
γ
schreiben, und ihn das Wegintegral des Vektorfeldes φ = −F T längs des Weges γ
nennen.
Mathematisch lässt sich die Situation aus Beispiel 11.2.1 dadurch fassen, dass man
ein sogenanntes Vektorfeld gegeben hat. Das ist eine Abbildung φ : D → L(Rn , X) von
einer Teilmenge D ⊆ Rn in die Menge aller linearen3 Abbildungen von Rn in einen
Banachraum X – meistens ist, so wie in Beispiel 11.2.1, X = R.
Ist nun γ : [a, b] → D ⊆ Rn ein Weg, so entspricht die oben erwähnte Approxin(R) mation der Arbeit bei gegebener Riemannscher Zerlegung R = (ξ j )n(R)
j=0 ; (α j ) j=1 der
Summe
n(R)
X
φ γ(α j ) γ(ξ j ) − γ(ξ j−1 ) .
(11.4)
W(R) :=
j=1
11.2.2 Definition. Konvergiert das Netz W(R) R∈R in X, so nennen wir seinen Grenzwert
Z
φ(x) dx := lim W(R)
γ
3 Wegen
|R|→0
Beispiel 9.2.10 sind diese automatisch beschränkt, wenn wir Rn mit k.k2 versehen!
KAPITEL 11. WEGINTEGRALE
100
das Wegintegral von φ längs des Weges γ.
Für f : [a, b] → L(Rn , X), g : [a, b] → Rn und R ∈ R setzen wir zudem
P(R) :=
n(R)
X
j=1
Das Riemann-Stieltjes Integral
in X existiert.
Rb
a
f (α j ) g(ξ j ) − g(ξ j−1 ) .
f dg ist definiert als limR∈R P(R), falls dieser Limes
Wegintegrale sind spezielle Riemann-Stieltjes Integrale, da P(R) = W(R) und in
Rb
R
Folge a f dg = γ φ(x) dx, wenn g = γ und f = φ ◦ γ.
11.2.3 Fakta.
1. Ist γ̃ : [ã, b̃] → D ⊆ Rn ein Weg und γ = γ̃ ◦ β : [a, b] → D ein zu γ̃ äquivalenter
Weg mit einer streng monoton wachsenden Bijektion
β : [a, b] → [ã, b̃]. Da β und β−1 beide stetig sind, sind sie wegen Satz 6.3.3
sogar gleichmäßig stetig. Nun seien W(R) die Wegsummen von φ längs γ und
W̃(R̃) die Wegsummen von φ längs γ̃.
n(R) Ist R = (ξ j )n(R)
j=0 ; (α j )j=1 eine Riemann-Zerlegung von [a, b], so ist β(R) :=
n(R)
eine solche von [ã, b̃] und umgekehrt. Dabei gilt
β(ξ j ) n(R)
j=0 ; β(α j ) j=1
W̃(β(R)) = W(R).
Wegen der gleichmäßigen Stetigkeit gibt es dabei zu jeder Riemann-Zerlegung
R̃0 von [ã, b̃] ein δ > 0, sodass für jede Riemann-Zerlegung R von [a, b] aus
|R| ≤ δ auch |β(R)| ≤ |R̃0 | folgt. Gemäß Definition 5.3.6 ist somit W(R) R∈R =
W̃(β(R)) R∈R ein Teilnetz von W̃(R̃) R̃∈R̃ . Weil auch β−1 gleichmäßig stetig ist,
gilt auch die Umkehrung. Wegen Lemma 5.3.7 erhalten wir
Z
Z
φ(x) dx
φ(x) dx =
γ̃
γ
in dem Sinne, dass wenn eines dieser Integrale existiert, dann auch das andere
existiert und diese übereinstimmen.
Ist γ− der in die Gegenrichtung durchlaufene Weg, so entsprechen sich die
Riemann-Summen auch bijektiv, wobei die korrespondierenden
R Summen W(R)
R
nur im Vorzeichen unterscheiden, und somit γ− φ(x) dx = − γ φ(x) dx gilt.
2. Ist unser Weg rektifizierbar und stetig, d.h. ℓ(γ) < +∞, und ist φ stetig, so existiert das Integral.
Rb
Das folgt aus der allgemeineren Tatsache, dass a f dg existiert, falls f stetig
auf [a, b] und g rektifizierbar ist. Der Beweis für diese Tatsache ist ähnlich, wie
der Beweis für die Riemann-Integrierbarkeit stetiger Funktionen mit Hilfe des
Cauchy-Kriteriums.
n(R) n(R1 ) 1)
zwei
und R = (η j )n(R)
Beweis. Sind R1 = (ξ j )n(R
j=0 ; (β j ) j=1
j=0 ; (α j ) j=1
Riemann-Zerlegungen von [a, b], sodass die Stützstellen von R die von R1 umfassen.
Ist j ∈ {1, . . . , n(R1 )}, so gibt es Indizes k( j − 1) < k( j), sodass
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 < ηk( j) = ξ j .
|
{z
}
k( j)−k( j−1)−1 viele
11.2. WEGINTEGRALE
101
Mit g(ξ j ) − g(ξ j−1 ) =
Pk( j)
k=k( j−1)+1
g(ηk ) − g(ηk−1 ) folgt
kP(R) − P(R1 )k ≤
k( j)
n(R
X1 ) X
f (α j ) g(ξ j ) − g(ξ j−1 ) −
f (βk ) g(ηk ) − g(ηk−1 ) j=1
k=k( j−1)+1
≤
n(R
X1 )
k( j)
X
j=1 k=k( j−1)+1
k f (α j ) − f (βk )k · kg(ηk ) − g(ηk−1 )k2 .
Dabei ist k f (α j ) − f (βk )k die Abbildungsnorm auf L(Rn , X), wenn Rn mit der
euklidischen Norm versehen ist.
Wegen |α j − βk | ≤ (ξ j − ξ j−1 ) ≤ |R1 |, k ∈ {k( j − 1) + 1, . . . , k( j)} folgt
kP(R) − P(R1 )k ≤
n(R)
X
k=1
ρ(|R1 |) · kg(ηk ) − g(ηk−1 )k2 ≤ ρ(|R1 |) · ℓ(g) ,
(11.5)
wobei ρ(δ) := sups,t∈[a,b],|s−t|≤δ k f (s) − f (t)k.
Sind nun R1 und R2 zwei beliebige Riemann-Zerlegungen von [a, b] und wählt
man R so, dass die Stützstellen von R sowohl die von R1 also auch die von
R2 umfasst, so folgt aus (11.5) je einmal angewandt auf R1 und auf R2 , der
Dreiecksungleichung sowie der Monotonie von ρ
kP(R1 ) − P(R2 )k ≤ ρ(|R1 |) + ρ(|R2 |) · ℓ(g) .
Wegen der gleichmäßigen Stetigkeit von f gilt limδ→0 ρ(δ) = 0, woraus folgt,
dass P(R) R∈R ein Cauchy-Netz und daher konvergent ist.
❑
3. Als Grenzwert von Netzen mit Werten im Banachraum X erfüllen Wegintegrale
(µ, ν ∈ R):
Z
Z
Z
(µφ(x) + νψ(x)) dx = µ φ(x) dx + ν ψ(x) dx
γ
γ
γ
Entsprechend sind Riemann-Stieltjes Integrale linear nicht nur in f , sondern auch
in g.
4. Sind γ1 : [a1 , b1 ] → D, γ2 : [a2 , b2 ] → D zwei stetige und rektifizierbare Wege
mit b1 = a2 und γ1 (b1 ) = γ2 (a2 ), und ist φ : D → L(Rn , X) stetig, dann gilt
Z
Z
Z
φ(x) dx .
(11.6)
φ(x) dx +
φ(x) dx =
γ1 ⊕γ2
γ2
γ1
Allgemeiner folgt für ein stetiges f : [a, c] → L(Rn , X), ein rektifizierbares
g : [a, c] → Rn und ein b ∈ (a, c), dass
Z c
Z b
Z c
f dg .
f dg +
f dg =
a
a
b
Beweis. Die Voraussetzungen gewährleisten, dass alle Integrale existieren. Zu
Rb
gegebenem ǫ > 0 sei δ > 0 so klein, dass kP(R1 ) − a f dgk < ǫ,
KAPITEL 11. WEGINTEGRALE
102
Rc
Rc
kP(R2 ) − b f dgk < ǫ und kP(R) − a f dgk < ǫ für jede Riemann-Zerlegung R1
von [a, b], jede Riemann-Zerlegung R2 von [b, c] und jede Riemann-Zerlegung
R von [a, c] mit |R1 |, |R2 |, |R| < δ.
Sind R1 und R2 zwei beliebige Riemann-Zerlegungen von [a, b] bzw. [b, c] mit
|R1 |, |R2 | < δ, so sei R jene Riemann-Zerlegungen von [a, c], deren Stütz- und
Zwischenstellen genau jene von R1 und R2 umfasst. Dann gilt |R| < δ und P(R) =
P(R1 ) + P(R2 ). Somit folgt aus der Dreiecksungleichung
Z b
Z c
Z c
f dg ≤
f dg −
f dg +
a
b
a
Z c
Z b
Z c
f dg < 3ǫ .
f dg + P(R2 ) −
f dg + P(R) −
P(R1 ) −
a
a
b
Da ǫ > 0 beliebig war, gilt die behauptete Gleichheit.
❑
5. Es gilt
kP(R)k ≤
sup k f (t)k
t∈[a,b]
n(R)
X
j=1
n(R)
X
j=1
k f (α j )k · kg(ξ j ) − g(ξ j−1 )k2 ≤
kg(ξ j ) − g(ξ j−1 )k2 ≤ sup k f (t)k · ℓ(g) .
t∈[a,b]
Daraus sieht man, dass für konstantes g das Riemann-Stieltjes Integral existiert
und verschwindet. Entsprechend verschwindet das Wegintegral über einen konstanten Weg.
Existiert das Riemann-Stieltjes Integral, so ist seine Norm kleiner oder gleich
supt∈[a,b] k f (t)k · ℓ(g). Existiert das Wegintegral, so gilt entsprechend
Z
(11.7)
k φ(x) dxk ≤ sup kφ ◦ γ(t)k · ℓ(γ) .
t∈[a,b]
γ
6. Ist γ : [0, 1] → D ein gerade Strecke, also γ(t) = tx1 + (1 − t)x0 , und ist φ stetig,
P
so gilt W(R) = n(R)
j=1 (ξ j − ξ j−1 )φ γ(α j ) (x1 − x0 ) und daher
Z
φ(x) dx =
γ
Z
1
0
φ tx1 +(1−t)x0 (x1 −x0 ) dt =
Z
|
0
1
!
φ tx1 + (1 − t)x0 dt (x1 −x0 ) .
{z
}
∈L(Rn ,X)
11.2.4 Bemerkung. Die Stetigkeit eines Vektorfeldes φ : D → L(Rn , X) mit D ⊆ Rn ist
äquivalent zur Stetigkeit der Funktion x 7→ φ(x)e j , j = 1, . . . , n, wie man unmittelbar
aus
max kφ(x)e j − φ(y)e j k ≤ kφ(x) − φ(y)k =
j=1,...,n
X
k φ(x) − φ(y) vkX ≤
kφ(x)e j − φ(y)e j k
n
sup
v∈Rn ,kvk∞ =1
erkennt.
j=1
11.2. WEGINTEGRALE
103
Um konkret Riemann-Stieltjes Integrale bzw. in Folge Wegintegrale aus zurechnen
dient am besten folgender Satz.
11.2.5 Satz. Ist g ∈ C 1 [a, b] und f stetig, so folgt
Z b
Z b
f (t) g′ (t) dt .
f dg =
a
a
1
Ist γ ∈ C [a, b] und φ stetig, so gilt
Z
Z
φ(x) dx =
γ
b
a
φ γ(t) γ′ (t) dt .
Dasselbe gilt für stetige und stückweise stetig differenzierbare Wege g bzw. γ.
Beweis. Nach dem Hauptsatz der Differential- und Integralrechnung gilt (R ∈ R)
P(R) =
n(R)
X
j=1
X
f (α j ) g(ξ j ) − g(ξ j−1 ) =
f (α j )
n(R)
j=1
Z
ξj
ξ j−1
g′ (t) dt =
Z
a
b
fR (t) g′ (t) dt ,
wobei fR (t) die stückweise konstante Funktion mit fR (t) = f (α j ), t ∈ [ξ j−1 , ξ j ), j =
1, . . . , n(R), und fR (b) = f (αn(R) ) ist. Für t ∈ [ξ j−1 , ξ j ), 1 ≤ j < n(R), bzw. für t ∈
[ξn(R)−1 , ξn(R) ] gilt
k fR (t) g′ (t) − f (t) g′ (t)k ≤
k fR (t) − f (t)k · kg′ (t)k2 = k f (α j ) − f (t)k · kg′ (t)k2 ≤ ρ(|R|) · max kg′ (s)k2 ,
s∈[a,b]
wobei ρ(δ) := sups,t∈[a,b],|s−t|≤δ k f (s) − f (t)k. Somit gilt limR∈R fR (t) g′ (t) = f (t) g′ (t)
und zwar gleichmäßig in t ∈ [a, b]. Nach Satz 8.7.2 angewandt auf ein gleichmäßig
konvergentes Netz von Funktionen erhalten wir
Z b
Z b
Z b
lim P(R) = lim
f (t) g′ (t) dt .
lim fR (t) g′ (t) dt =
fR (t) g′ (t) dt =
R∈R
R∈R
a
a R∈R
a
Für stetige und stückweise stetig differenzierbare Kurven folgt die Behauptung aus
dem gerade bewiesenen und Fakta 11.2.3, 4.
❑
11.2.6 Bemerkung. Ist X = Rm , so stellt man φ : D → L(Rn , X) meist als m × n-Matrix
dar. Sind γ j (t) die Komponenten unseres Weges, so berechnet man das Wegintegral
durch
′
Z b φ11 (γ(t)) · · · φ1n (γ(t)) γ1 (t)
..
..
..
. dt .
.
.
a
φm1 (γ(t)) · · · φmn (γ(t)) γn′ (t)
11.2.7 Bemerkung (*). Wie im Abschnitt über Wege ist bisher auch nirgends eingegangen, dass g bzw. γ in den (Rn , k.k2 ) hinein abbildet.
Die obigen Resultate samt Beweise bleiben gültig, wenn g bzw. γ das Intervall
[a, b] in eine Menge D ⊆ Y (Y ist Banachraum) abbilden, und f : [a, b] → L(Y, X) bzw.
φ : D → L(Y, X), also jedem t ∈ [a, b] bzw. y ∈ D eine beschränkte lineare Abbildung
von Y nach X zuordnet.
KAPITEL 11. WEGINTEGRALE
104
11.3 Offene Mengen in Rn und Gebiete
Ehe wir uns weiter mit Vektorfeldern beschäftigen, wollen wir uns die Struktur von
offenen Teilmengen des Rn anschauen. Dazu sei zunächst an den Begriff einer zusammenhängenden Teilmenge E eines metrischen Raumes aus Definition 6.2.2 erinnert. E heißt zusammenhängend, wenn man E nicht als Vereinigung zweier nichtleerer getrennter Mengen schreiben kann. Dabei heißen A und B getrennt, wenn
c(A) ∩ B = A ∩ c(B) = ∅.
11.3.1 Lemma. Ist (Ei )i∈I eine Familie bestehend aus zusammenhängenden Teilmengen eines metrischen Raumes, sodass für ein gewisses i0 ∈ I und allen i ∈ I die Mengen
S
Ei0 und Ei nicht getrennt sind4 , so ist auch E := i∈I Ei zusammenhängend.
˙ mit getrennten, Mengen A und B. Es folgt Ei =
Beweis. Angenommen E = A∪B
˙ ∩ Ei ) für jedes i ∈ I. Wegen c(A ∩ Ei ) ∩ (B ∩ Ei ) ⊆ c(A) ∩ B = ∅ und
(A ∩ Ei )∪(B
(A ∩ Ei ) ∩ c(B ∩ Ei ) ⊆ A ∩ c(B) = ∅ sind auch A ∩ Ei und B ∩ Ei getrennt. Da Ei
zusammenhängend ist, muss eine dieser Mengen leer sein; also Ei ⊆ A oder Ei ⊆ B.
Wir wählen die Bezeichnung so, dass Ei0 ⊆ A. Wäre Ei ⊆ B für nur ein i ∈ I, so
wären Ei0 und Ei im Widerspruch zur Voraussetzung getrennt. Somit muss E ganz in
A enthalten sein; dh. B = ∅.
❑
11.3.2 Definition. Offene und zusammenhängende Teilmengen von Rn heißen Gebiete.
Die Eigenschaft Gebiet zu sein, lässt sich mit Hilfe von stetigen Wegen charakterisieren.
11.3.3 Lemma. Für ein offenes ∅ , D ⊆ Rn sind folgende Aussagen äquivalent.
(i) D ist zusammenhängend – also ein Gebiet.
(ii) Je zwei Punkte x, y aus D sind durch einen stetigen Weg in D verbindbar5.
(iii) Je zwei Punkte aus D sind durch einen stetigen und stückweise stetig differenzierbaren Weg in D verbindbar.
(iv) Je zwei Punkte aus D sind durch einen Polygonzug in D verbindbar.
(v) Je zwei Punkte aus D sind durch einen achsenparallelen6 Polygonzug in D verbindbar.
Beweis. Die Schlüsse (v) ⇒ (iv), (iv) ⇒ (iii) und (iii) ⇒ (ii) sind offensichtlich richtig.
Gelte nun (ii) und sei x irgendein fester Punkt aus D. Zu jedem y ∈ D gibt es einen
stetigen Weg γy : [ay , by ] → D mit γy (ay ) = x und γy (by ) = y. Es folgt
[
[
D=
{y} ⊆
γy ([ay , by ]) ⊆ D .
y∈D
y∈D
Also ist D die Vereinigung der nach Proposition 6.2.4 zusammenhängenden Mengen
γy ([ay , by ]), y ∈ D. Nach unserer Wahl von γy haben diese Mengen zumindest den
Punkt x gemein. Nach Lemma 11.3.1 ist D zusammenhängend; also gilt (i).
4 Diese
Voraussetzung ist sicher dann erfüllt, wenn Ei0 mit allen Ei einen nichtleeren Schnitt hat.
bedeutet, dass es einen stetigen Weg γ : [a, b] → D mit γ(a) = x und γ(b) = y gibt.
−−−−
6 Das ist ein Polygonzug −
x−0−→
x1 , −
x−1−→
x2 , . . . , −
x−m−1
x→
m , wo x j − x j−1 ein skalares Vielfaches eines gewissen
kanonischen Basisvektors ei( j) für j = 1, . . . , m ist.
5 Das
11.3. OFFENE MENGEN IN RN UND GEBIETE
105
Sei nun D zusammenhängend und x ∈ D wieder fest. Wir bezeichnen mit A die
Menge aller Punkte y ∈ D, die mit x durch einen achsenparallelen Polygonzug in D
→
verbindbar sind. Da −
xx auch ein solcher ist, folgt x ∈ A, also A , ∅. Klarerweise
ist B := D \ A die Menge aller y ∈ D, die mit x nicht durch einen achsenparallelen
Polygonzug in D verbindbar sind.
Sei y ∈ A und δ > 0 so klein, dass Uδ (y) – definiert bezüglich der k.k∞ -Norm auf Rn
−−−−
– ganz in D enthalten ist. Ist nun −
x−0−→
x1 , . . . , −
x−m−1
x→
m ein achsenparalleler Polygonzug von
x nach y in D, daher x0 = x und xm = y, und z ∈ Uδ (y), so gilt z = y + λ1 e1 + · · · + λn en
mit |λ1 |, . . . , |λn | < δ und daher ist
−−−−−−−−−−→
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−→
−
−−−−
x−0−→
x1 , . . . , −
x−m−1
x→
m , y (y + λ1 e1 ), . . . , (y + λ1 e1 + . . . λn−1 en−1 ) (y + λ1 e1 + . . . λn en )
|
{z
}
verläuft in Uδ (y)
ein achsenparalleler Polygonzug von x nach z in D. Also ist z ∈ A und daher Uδ (y) ⊆ A.
Somit ist A offen, und kein Punkt y aus A kann Häufungspunkt von B sein, da ja Uδ (y)
keine Punkte aus B enthält. Also gilt A ∩ c(B) = ∅.
Sei nun y ∈ B und δ > 0 so klein, dass Uδ (y) ⊆ D. Ist z = y+λ1 e1 +· · ·+λn en ∈ Uδ (y)
−−−−
und wäre z ∈ A mit einem achsenparalleler Polygonzug −
x−0−→
x1 , . . . , −
x−m−1
x→
m von x0 = x
nach xm = z in D, so wäre
−−−−−−−−−−−−−−−−−−−−−−−→
−−−−−−−−−−→
−
−−−−
x−0−→
x1 , . . . , −
x−m−1
x→
m , z (y + λ1 e1 + . . . λn−1 en−1 ), . . . , (y + λ1 e1 ) y
|
{z
}
verläuft in Uδ (y)
ein achsenparalleler Polygonzug von x nach y in D, und daher y ∈ A. Dieser Widerspruch zeigt, dass z ∈ B und somit Uδ (y) ⊆ B. Also ist auch B offen, und kein Punkt y
aus B kann Häufungspunkt von A sein, da ja Uδ (y) keine Punkte aus A enthält. Somit
gilt auch c(A) ∩ B = ∅.
Da D zusammenhängend ist, und da A , ∅, muss B = ∅ bzw. D = A, was aber
genau bedeutet, dass alle Punkte aus D mit x durch einen achsenparallelen Polygonzug
verbindbar sind. Klarerweise sind dann auch zwei beliebige Punkte aus D durch
einen achsenparallelen Polygonzug – zumindest via x – verbindbar, und wir haben (v)
nachgewiesen.
❑
11.3.4 Beispiel. Ist D ⊆ Rn offen und konvex, so lassen sich je zwei Punkte x, y aus D
−
durch die gerade Strecke →
xy verbinden. Gemäß Lemma 11.3.3 ist somit D ein Gebiet.
Insbesondere sind alle offenen Kugeln bzgl. jeder möglichen Norm in Rn Gebiete; vgl.
Bemerkung 10.1.4.
Um beliebigen offene Teilmengen des Rn eine Struktur geben zu können, benötigen
wir folgendes Lemma.
11.3.5 Lemma. Sei E eine nichtleere Teilmenge eines metrischen Raumes und sei ∼⊆
E × E die Relation auf E definiert durch
x ∼ y ⇔ ∃ Z ⊆ E : x, y ∈ Z, Z ist zusammenhängend ,
so ist ∼ eine Äquivalenzrelation auf E. Für ein x ∈ E ist die Äquivalenzklasse [x]∼ die
größte zusammenhängende Teilmenge von E, die x enthält.
Beweis. Da die einpunktige Menge {x} zusammenhängend ist, ist ∼ reflexiv. Die Symmetrie ist klar. Ist x ∼ y, y ∼ z, und sind Z1 und Z2 zusammenhängende Mengen, sodass
KAPITEL 11. WEGINTEGRALE
106
x, y ∈ Z1 und y, z ∈ Z2 , so ist nach Lemma 11.3.1 Z1 ∪ Z2 zusammenhängend, wobei
x, z ∈ Z1 ∪ Z2 . Also ist ∼ ein Äquivalenzrelation. Schließlich ist für x ∈ E die Menge
[
[x]∼ =
Z,
x∈Z
Z ist zusammenhängend
wegen Lemma 11.3.1 zusammenhängend. Klarerweise ist diese Menge dann auch die
größte zusammenhängende Teilmenge von E, die x enthält.
❑
11.3.6 Proposition. Für ein offenes ∅ , G ⊆ Rn sind die Äquivalenzklassen [x]∼
bezüglich der Äquivalenzrelation ∼ aus Lemma 11.3.5 angewandt auf E = G Gebiete.
Insbesondere, lässt sich G als disjunkte Vereinigung von Gebieten schreiben.
Beweis. Für y ∈ [x]∼ ⊆ G sei ǫ > 0, sodass Uǫ (y) ⊆ G. Wegen Lemma 11.3.1
zusammen mit Beispiel 11.3.4 ist [x]∼ ∪ Uǫ (y) zusammenhängend. Da [x]∼ die größte
zusammenhängende Teilmenge von D ist, welche x enthält, folgt [x]∼ ∪ Uǫ (y) = [x]∼ ,
also Uǫ (y) ⊆ [x]∼ .
Wir haben somit gezeigt, dass [x]∼ offen und daher ein Gebiet ist.
❑
11.4 Gradientenfelder
Rb
Wir wollen eingangs ein mehrdimensionales Analogon der Tatsache a f ′ (t) dt =
f (b) − f (a) für Wegintegrale herleiten. Dafür sei bemerkt, dass für ein stetig differenzierbares f : D → X mit offenem D ⊆ Rn und einem Banachraum X die Ableitung
d f : D → L(Rn , X) ein Vektorfeld ist.
11.4.1 Satz. Sei D ⊆ Rn offen, X ein Banachraum und f : D → X eine stetig differenzierbare Funktion. Für einen stetigen und stückweise stetig differenzierbaren Weg
γ : [a, b] → D gilt
Z
d f (x) dx = f γ(b) − f γ(a) .
γ
Beweis. Sind a = t0 < t1 < · · · < tl = b so, dass γ|[t j−1 ,t j ] ∈ C 1 [t j−1 , t j ], so folgt aus der
Kettenregel und dem Hauptsatz der Differential- und Integralrechnung Satz 8.4.5
Z
d f (x) dx =
γ
Z
a
l X
j=1
b
′
d f γ(t) γ (t) dt =
Z
a
b
( f ◦ γ)′ (t) dt =
f γ(t j ) − f γ(t j−1 ) = f γ(b) − f γ(a) .
❑
11.4.2 Beispiel. Wir betrachten nochmals Beispiel 11.2.1. Dort war das Vektorfeld
φ : R3 \ {0} → L(R3 , R) durch φ(x) = kxk1 3 (ξ, η, ζ) gegeben. Nun ist aber, φ(x) =
2
d f (x), wobei f (x) = − kxk1 2 . Insbesondere berechnet sich die Arbeit, die man verrichten
11.4. GRADIENTENFELDER
107
muss, um einen Punkt P von x0 nach x1 entlang eines stetigen und stückweise stetig
differenzierbaren Weges γ zu bewegen, durch
Z
1
1
φ(x) dx =
−
.
kx
k
kx
0 2
1 k2
γ
11.4.3 Definition. Vektorfelder φ : D → L(Rn , X), die Ableitungen d f stetig differenzierbarer Funktionen f : D → X sind, heißen Gradientenfelder. Jedes stetig differenzierbare f : D → X mit d f = φ nennt man Stammfunktion von φ.
11.4.4 Korollar. Ist D ein Gebiet und φ : D → L(Rn , X) ein Gradientenfeld, so ist die
Stammfunktion f ∈ C 1 (D) von φ, dh. d f = φ, bis auf eine additive Konstante aus X
eindeutig.
Beweis. Falls d f1 = φ = d f2 für zwei C 1 (D)-Funktionen f1 , f2 , so folgt für beliebige
x, y ∈ D aus Satz 11.4.1 angewandt auf 0 = d f1 − d f2 und irgendeinen geeigneten Weg γ : [a, b] → D mit γ(a) = x und γ(b) = y (vgl. Lemma 11.3.3), dass
( f1 − f2 )(x) = ( f1 − f2 )(y). Somit ist f1 − f2 auf D konstant.
❑
11.4.5 Bemerkung. Die Tatsache, dass φ ein Gradientenfeld ist, hängt entscheidend
von seinem Definitionsbereich ab D.
y
x In der Tat gilt für das Vektorfeld φ : R2 \{0} → L(R2 , R), φ (x, y)T = − x2 +y
2 , x2 +y2
und den Weg γ(t) = (cos t, sin t)T , t ∈ [0, 2π]
Z
φ(x) dx , 0 .
γ
Wegen γ(0) = γ(2π) erkennen wir aus Satz 11.4.1, dass φ : R2 \ {0} → L(R2 , R) kein
Gradientenfeld ist.
Macht man den Definitionsbereich R2 \ {0} von φ kleiner, z.B. D = R2 \ {(x, y)T :
x ≤ 0}, so ist φ sehr wohl ein Gradientenfeld; vgl. Beispiel 11.5.8.
Die in Satz 11.4.1 angegebene Eigenschaft, dass Wegintegrale über Gradientenfelder nicht vom konkreten Weg abhängen, charakterisiert in der Tat Gradientenfelder;
siehe Satz 11.4.7. Um das zu zeigen, brauchen wir folgende Begriffsbildung:
Zu c, x ∈ Rn und einer Permutation σ von {1, . . . , n}, dh. σ : {1, . . . , n} → {1, . . . , n}
σ
ist bijektiv, sei γc,x
: [0, n] → Rn der achsenparallele Polygonzug
−
−−−
→
y−0−→
y1 , −
y−1−→
y2 , . . . , −
y−n−1
yn ,
wobei
yk := c +
k
X
(xσ( j) − cσ( j) )eσ( j) , k = 0, . . . , n ,
j=1
und damit insbesondere y0 = c, yn = x.
Q
11.4.6 Lemma. Sei D = nk=1 (ak , bk ) ⊆ Rn , und φ : D → L(Rn , X) stetig. Falls für ein
festes c ∈ D und allen x ∈ D das Wegintegral
Z
φ(v) dv
σ
γc,x
KAPITEL 11. WEGINTEGRALE
108
unabhängig von der Permutation σ : {1, . . . , n} → {1, . . . , n} ist, so stellt
Z
φ(v) dv
f (x) :=
σ
γc,x
eine stetig differenzierbare Funktion f : D → X dar, wobei d f = φ.
Beweis. Sei δ > 0, sodass Uδk.k∞ (x) ⊆ D. Für 0 , |t| < δ, j ∈ {1, . . . , n} und irgendeiner
Permutation σ mit σ(n) = j gilt im Falle sgn(t · (x j − c j )) ≥ 0,
σ
γc,x+te
|
j [0,n−1+
und damit
Z
x j −c j
x j −c j +t ]
σ
σ
∼ γc,x
und γc,x+te
|
j [n−1+
Z
φ(v) dv =
φ(v) dv +
σ
γc,x
σ
γc,x+te
j
x j −c j
x j −c j +t ,n]
Z
−−−−−−−→
x (x+te j )
−−−−−−−−→
∼ x (x + te j )
φ(v) dv .
Im Falle sgn(t · (x j − c j )) < 0 gilt
−−−−−−−−→
σ
σ
σ
γc,x
|[0,n−1+ x j −c j +t ] ∼ γc,x+te
und γc,x
|[n−1+ x j −c j +t ,n] ∼ (x + te j ) x
j
x j −c j
und damit
Z
φ(v) dv =
σ
γc,x
x j −c j
Z
φ(v) dv +
σ
γc,x+te
j
Z
−−−−−−−→
(x+te j ) x
φ(v) dv .
Also gilt in jedem Fall
f (x + te j ) − f (x) 1
=
t
t
Z
φ(v) dv =
−−−−−−−→
x (x+te j )
Z
1
φ(x + tse j ) e j ds .
0
Wegen der Stetigkeit der Funktion φ konvergiert der Integrand für t → 0 gleichmäßig
∂f
in s ∈ [0, 1] gegen die Konstante φ(x)e j (∈ X). Also folgt ∂x
(x) = φ(x)e j ; vgl. Satz
j
8.7.2 bzw. (9.17). Da dieser Ausdruck für jedes j stetig in x ist, gilt f ∈ C 1 (D) mit
d f = φ; siehe Korollar 8.7.9 bzw. (9.18).
❑
11.4.7 Satz. Sei D ⊆ Rn eine offene Menge und sei φ : D → L(Rn , X) ein Vektorfeld.
φ ist genau dann ein Gradientenfeld, wenn φ stetig und derart ist, dass Wegintegrale
von φ über achsenparallele Polygonzüge nur von Anfangs- und Endpunkt des Weges
abhängen.
Beweis. Die Beweisrichtung ⇒ folgt sofort aus Satz 11.4.1.
Nun kommen wir zu ⇐. Gemäß Proposition 11.3.6 können wir D als disjunkte
Vereinigung von gewissen Gebieten θ schreiben. Nun greife man aus jedem solchen
Gebiet θ ein festes xθ ∈ θ heraus, und definiere für x ∈ θ
Z
φ(v) dv ,
f (x) =
ρθx
wobei ρθx : [a, b] → θ irgendein achsenparalleler Polygonzug mit ρθx (b) = x und ρθx (a) =
xθ ist; vgl. Lemma 11.3.3. Wegen der Wegunabhängigkeit und weil jedes x ∈ D in
irgendeinem solchen Gebiet liegt, ist auf diese Art und Weise eine Funktion f : D → X
wohldefiniert.
11.5. LOKALE GRADIENTENFELDER
109
Sei nun c ∈ D, θ das Gebiet mit c ∈ θ und δ > 0 so, dass Uδk.k∞ (c) ⊆ θ. Für
x ∈ Uδk.k∞ (c) gilt wegen der Wegunabhängigkeit
f (x) =
Z
ρθc
φ(v) dv +
Z
φ(v) dv .
σ
γc,x
Gemäß Lemma 11.4.6 ist f auf Uδk.k∞ (c) stetig differenzierbar mit d f |Uk.k∞ (c) = φ|Uk.k∞ (c) .
δ
δ
Da stetig differenzierbar zu sein eine lokale Eigenschaft ist, folgt f ∈ C 1 (D) mit
d f = φ.
❑
R
R
11.4.8 Bemerkung. Die Voraussetzung in Satz 11.4.7, dass γ φ(x) dx = γ φ(x) dx für
1
2
je zwei achsenparallele Polygonzüge
γ1 und γ2 mit gleichen Anfangs- und Endpunkten,
R
ist äquivalent dazu, dass γ φ(x) dx = 0 für alle achsenparallele Polygonzüge γ, deren
Endpunkt gleich dem Anfangspunkt ist. Das sieht man leicht dadurch, indem man γ =
γ̃1 ⊕ (γ̃2 −) betrachtet, wobei γ̃ j derart äquivalent zu γ j ist, sodass sich γ̃1 ⊕ (γ̃2 −) bilden
lässt.
11.5 Lokale Gradientenfelder
Etwas schwächer als Gradientenfeld ist folgender Begriff.
11.5.1 Definition. Sei D ⊆ Rn eine offene Menge und sei φ : D → L(Rn , X) ein stetiges
Vektorfeld. Dann heißt φ lokales Gradientenfeld, wenn es zu jedem x ∈ D ein offenes
D(x) ⊆ D7 mit x ∈ D(x) gibt, sodass φ|D(x) : D(x) → L(Rn , X) ein Gradientenfeld ist.
Dass die Begriffe lokales Gradientenfeld und Gradientenfeld nicht äquivalent sind,
werden wir in Beispiel 11.5.8 sehen.
11.5.2 Bemerkung. Seien 0 < ρ1 < ρ2 < +∞ zwei Radien, sodass φ|Uρ j (x) : Uρ j (x) →
L(Rn , X) für j = 1, 2 ein Gradientenfeld ist – also φ|Uρ j (x) = d f j für f j ∈ C 1 (Uρ j (x)).
Da die Addition einer Konstanten zu f j daran nichts ändert, können wir zusätzlich
f1 (x) = 0 = f2 (x) annehmen.
Da innerhalb einer Kugel ein Punkt durch eine gerade Strecke mit dem Mittelpunkt
verbunden werden kann, folgt aus Korollar 11.4.4, dass sich f1 und f2 auf der kleineren
Kugel Uρ1 (x) nur um eine additive Konstante aus X unterscheiden. Wegen f1 (x) = 0 =
f2 (x), folgt f1 = f2 |Uρ1 (x) .
Ist nun R ⊆ (0, +∞) die Menge aller positiver Zahlen ρ, sodass φ|Uρ (x) immer ein
Gradientenfeld ist, so gibt es also fρ ∈ C 1 (Uρ (x)) mit d fρ = φ|Uρ (x) , welche FortsetS
zungen voneinander sind. Auf ρ∈R Uρ (x) = Usup R (x) ist somit durch f (y) = fρ (y) mit
y ∈ Uρ (x) eine C 1 Funktion wohldefiniert, welche offenbar d f = φ|Usup R (x) erfüllt.
Insgesamt erkennen wir, dass es für ein lokales Gradientenfeld φ : D → L(Rn , X)
zu jedem x ∈ D ein maximales 0 < ρ ≤ +∞ gibt, sodass Uρ (x) ⊆ D und φ|Uρ (x) ein
Gradientenfeld ist.
Bei stetig differenzierbaren Vektorfeldern gibt es eine greifbarere Bedingung dafür,
dass ein Vektorfeld ein lokales Gradientenfeld ist.
7 Klarerweise kann man D(x) kleiner machen und daher immer als ǫ-Kugel bezüglich der k.k - oder der
2
k.k∞ -Norm annehmen.
KAPITEL 11. WEGINTEGRALE
110
11.5.3 Definition. Ein Vektorfeld φ : D → L(Rn , X) heißt stetig differenzierbar stetig
differenzierbar, falls für alle j = 1, . . . , n die Funktionen x 7→ φ(x)e j von D nach X
hinein stetig differenzierbar sind.
11.5.4 Bemerkung. Wegen Bemerkung 11.2.4 sind stetig differenzierbare Vektorfelder
auch stetig.
11.5.5 Lemma (*). φ : D → L(Rn , X) ist genau dann stetig differenzierbar, wenn φ
als Abbildung von D in den Banachraum L(Rn , X) (versehen mit der Abbildungsnorm)
stetig differenzierbar ist.
Beweis. Wegen Satz 10.1.16 ist die stetige Differenzierbarkeit von φ als Abbildung
von D in den Banachraum L(Rn , X) äquivalent dazu, dass für i = 1, . . . , n die partiellen
Ableitungen ∂x∂ i φ(x) ∈ L(Rn , X) für alle x ∈ D existieren und stetig von x abhängen. Da
L(Rn , X) ∋ A 7→ Ae j ∈ X beschränkt und linear ist, folgt daraus, dass auch
∂
(φ(.)e j)(x) ∈ X
∂xi
existiert und mit ( ∂x∂ i φ(x))e j übereinstimmt; vgl. Fakta 9.3.12, 4. Da letztere Funktion
stetig von x abhängt, sind somit für j = 1, . . . , n die Funktionen x 7→ φ(x)e j von D
nach X stetig differenzierbar.
Seien umgekehrt alle diese Funktionen D ∋ x 7→ φ(x)e j ∈ X stetig differenzierbar,
und sei i ∈ {1, . . . , n}. Für jedes feste x ∈ D wird durch
µ1
n
X
∂
(φ(.)e j)(x)
B(x) : v = ... 7→
µj
∂xi
j=1
µn
eine lineare Abbildung von Rn nach X definiert, die gemäß Beispiel 9.2.10, (ii), beschränkt ist. Wegen
X ∂
∂
(φ(.)e j)(y)k
kB(x) − B(y)k = sup k B(x) − B(y) vkX ≤
k (φ(.)e j)(x) −
∂x
∂x
i
i
kvk∞ =1
j=1
n
ist B : D → L(Rn , X) stetig. Schließlich ist wegen
!
1
1
k (φ(x + tei ) − φ(x)) − B(x)k = sup k (φ(x + tei ) − φ(x)) − B(x) vkX =
t
t
kvk∞ =1
sup k
kvk∞ =1
n
X
j=1
µj
!
1
∂
(φ(.)e j)(x) kX ≤
(φ(x + tei )e j − φ(x)e j ) −
t
∂xi
!
1
∂
t→0
k (φ(x + tei )e j − φ(x)e j ) −
(φ(.)e j )(x) kX −→ 0 ,
t
∂xi
j=1
n
X
B(x) nichts anderes als
∂
∂xi φ(x).
❑
Sei nun D ⊆ Rn offen, φ : D → L(Rn , X) ein stetig differenzierbares Vektorfeld.
Angenommen, φ ist auf einem offenen D(x) ⊆ D mit x ∈ D(x) ⊆ D die Ableitung einer
11.5. LOKALE GRADIENTENFELDER
111
Funktion f : D(x) → X, also φ = d f . Klarerweise ist dann f ∈ C 2 (D(x)), und wegen
dem Satz von Schwarz gilt (y ∈ D(x))
∂2 f
∂2 f
∂
∂
φ(y)e j =
(y) =
(y) =
φ(y)ei .
∂xi
∂xi ∂x j
∂x j ∂xi
∂x j
(11.8)
Wir sehen also, dass
∂
∂
φ(.)e j =
φ(.)ei , i, j ∈ {1, . . . , n} ,
∂xi
∂x j
(11.9)
eine notwendige Bedingung dafür ist, dass φ ein lokales Gradientenfeld ist.
Wir wollen als nächstes zeigen, dass (11.9) auch hinreichend dafür ist, dass ein
Vektorfeld ein lokales Gradientenfeld ist. In der Tat werden wir für ein Vektorfeld
Q
φ : D → L(Rn , X), wobei D ein offener Quaders D = ni=1 (ai , bi ) ist, aus der Gültigkeit
von (11.9) herleiten, dass φ ein Gradientenfeld auf D ist. Es sei daran erinnert, dass
diese offenen Quader tatsächlich offen sind; vgl. Fakta 8.7.8.
11.5.6 Satz. Sei φ : D → L(Rn , X) ein stetig differenzierbares Vektorfeld.
Q
Für D = nk=1 (ak , bk ) ⊆ Rn folgt aus (11.9), dass φ ein Gradientenfeld ist.
Für beliebiges offenes D ⊆ Rn folgt aus (11.9), dass φ ein lokales Gradientenfeld
ist.
Q
Beweis. Sei c ∈ D = nk=1 (ak , bk ) und sei σ = id{1,...,n} die identische Permutation von
{1, . . . , n}. Mit der Notation, die wir vor Lemma 11.4.6 eingeführt haben, ist durch
Z
φ(v) dv (∈ X) ,
f (x) :=
σ
γc,x
eine Funktion f : D → X wohldefiniert. Für f ∈ C 1 (D) mit d f = φ, reicht es zu zeigen,
∂f
(x) = φ(x)ek für alle k = 1, . . . , n und x ∈ D.
dass ∂x
k
Mit (11.6), mit Satz 11.2.5 und mit der Substitution s = (x j − c j )t folgt
f (x) =
=
=
n Z
X
−−−−−→
j=1 y j−1 y j
Z
n
1
X
φ(v) dv
φ (1 − t)y j−1 + ty j y j − y j−1 dt
j=1 0
n Z x j −c j
X
j=1
0
φ y j−1 + se j e j ds ,
(11.10)
P
wobei yk = c + kj=1 (x j − c j )e j . Nun leiten wir diese Gleichung nach xk ab, und werten
bei x aus. Da für j < k der Ausdruck y j−1 von xk unabhängig ist, und somit im j-ten
Summanden von (11.10) die Variable xk nicht vorkommt, ist seine Ableitung gleich
Null.
Für j = k ist y j−1 auch von xk unabhängig. Somit tritt beim k-ten Summanden xk
nur in der oberen Integralgrenze auf, weswegen seine Ableitung nach xk übereinstimmt
mit
φ yk−1 + (xk − ck )ek ek = φ yk ek .
KAPITEL 11. WEGINTEGRALE
112
Für j > k tritt xk nur im Integranden auf, da dann y j−1 sehr wohl von xk abhängt. Wegen
Korollar 8.7.12 (siehe auch (9.19)) kann man Integral und ∂x∂ k vertauschen. Also ist die
Ableitung des j-ten Summanden von (11.10) gleich
Z x j −c j
∂
φ(y j−1 + se j ) e j ds
∂xk
0
und wegen (11.9) weiter gleich
Z
0
x j −c j
∂
φ(y j−1 + se j ) ek ds =
∂x j
φ y j−1 + (x j − c j )e j ek − φ(y j−1 )ek = φ(y j ) ek − φ(y j−1 ) ek .
Somit stimmt die Ableitung von (11.10) nach xk überein mit
n
X
∂f
(x) = φ(yk ) ek +
φ(y j ) ek − φ(y j−1 ) ek = φ(yn ) ek = φ(x) ek .
∂xk
j=k+1
Ist D ⊆ Rn offen und ist x ∈ D, so gilt für hinreichend kleines ρ > 0, dass Uρk.k∞ (x) ⊆ D.
Q
Da Uρk.k∞ (x) = ni=1 (xi − ρ, xi + ρ) ein offener Quader ist, folgt aus (11.9), dass φ|Uρk.k∞ (x)
ein Gradientenfeld ist. Also ist φ ein lokales Gradientenfeld.
❑
11.5.7 Beispiel. Sei D = {(x, y)T ∈ R2 : x , 0, y < π2 + πZ}, und
φ : D → L(R2 , R) R1×2 definiert durch
!
!
1
tan y
x
2
2
2
+x +y .
φ
= − 2 + 2xy + x ,
y
x
x cos2 y
φ ist stetig differenzierbar, wobei
!
!
∂ x
1
∂ x
φ e1 = − 2
φ
e2 .
+
2x
=
∂y y
∂x y
x cos2 y
Also ist φ nach Satz 11.5.6 ein lokales Gradientenfeld.
Da D kein Quader ist, sind wir zu diesem Zeitpunkt weder sicher, ob es sich um ein
Gradientenfeld handelt, noch haben wir die Stammfunktion explizit in der Hand. Um
diese zu finden, nehmen wir einmal unbestimmt f : D → R so an, dass d f = φ. Also
!
!
∂f x
tan y
1
∂f x
2
= − 2 + 2xy + x ,
=
+ x2 + y2 .
∂x y
∂y y
x
x cos2 y
Wegen der ersten Gleichung folgt
! Z
x3
tan y
tan y
x
+ x2 y +
+ c(y) ,
f
=
− 2 + 2xy + x2 dx + c(y) =
x
3
y
x
mit einer C 2 Funktion c(y), die nur von y abhängt. Nun leiten wir das nach y ab, verwenden die zweite Gleichung von oben und erhalten
!
1
1
∂f x
2
′
=
+ x + c (y) =
+ x2 + y2 .
x cos2 y
∂y y
x cos2 y
11.5. LOKALE GRADIENTENFELDER
113
3
Also muss c(y) von der Gestalt c(y) = y3 + c sein. Wir sehen, dass
!
tan y
x
x3 + y3
f
=
+ x2 y +
.
y
x
3
tatsächlich φ = d f erfüllt und somit eine Stammfunktion von φ ist. Insbesondere ist φ
auf ganz D ein Gradientenfeld.
11.5.8 Beispiel. Für D = R2 \ {0} sei das Vektorfeld φ : R2 \ {0} → L(R2 , R) definiert
durch
!
−y
x
x
φ
=( 2
, 2
).
2
y
x + y x + y2
∂
∂
Man rechnet elementar nach, dass ∂y
φ yx e1 = ∂x
φ yx e2 , und somit φ ein lokales
Gradientenfeld ist.
Wir haben in Bemerkung 11.4.5 angedeutet, wie man zeigen kann, dass φ : D →
L(R2 , R) kein Gradientenfeld ist. Wir wollen diese Tatsache hier auf eine andere Art
und Weise nachweisen. Dazu nehmen wir an, dass es doch ein g : D → R gibt, sodass dg = φ, und leiten daraus einen Widerspruch her. Addieren wir eine geeignete
Konstante, so können wir oBdA. g((1, 0)T ) = 0 annehmen.
Auf die obere Halbebene (−∞, +∞)×(0, +∞) eingeschränkt ist φ gemäß Satz 11.5.6
ein Gradientenfeld mit Stammfunktion f darauf. Der Ansatz
!
−y
∂f x
= 2
∂x y
x + y2
ergibt durch unbestimmte Integration f ((x, y)T ) = − arctan yx + c(y). Nun leiten wir
das nach y ab, und erhalten die Gleichung
x
x
+ c′ (y) = 2
,
x2 + y2
x + y2
also c′ (y) = 0, womit c(y) konstant ist. Da gemäß Korollar 11.4.4 die Stammfunktion
eines Vektorfeldes eindeutig ist, und da g|(−∞,+∞)×(0,+∞) auch eine solche Stammfunktion von φ|(−∞,+∞)×(0,+∞) ist, folgt
g|(−∞,+∞)×(0,+∞) = − arctan
x
+c.
y
Lassen wir in dieser Gleichung (x, y)T ∈ (−∞, +∞) × (0, +∞) gegen (1, 0)T streben, so
folgt 0 = − π2 + c. Lassen wir in obiger Gleichung dann (x, y)T ∈ (−∞, +∞) × (0, +∞)
gegen (−1, 0)T streben, so schließen wir auf g((−1, 0)T ) = π2 + c = π.
Auf der unteren Halbebene (−∞, +∞) × (−∞, 0) erhalten wir ganz ähnlich
− arctan yx + d als Stammfunktion, und somit
g|(−∞,+∞)×(−∞,0) = − arctan
x
+d.
y
Lassen wir hier nun (x, y)T ∈ (−∞, +∞) × (−∞, 0) gegen (−1, 0)T streben, so konvergiert yx gegen −∞, womit wir π = g((−1, 0)T ) = − π2 + d, also d = 3π
2 erhalten.
T
T
Lassen wir schließlich (x, y) ∈ (−∞, +∞) × (−∞, 0) gegen (1, 0) streben, so folgt der
Widerspruch 0 = g((1, 0)T ) = π2 + d = 2π.
KAPITEL 11. WEGINTEGRALE
114
11.5.9 Bemerkung (*). Sei I ein reelles Intervall und x : I → Rn eine C 1 -Funktion mit
x(I) ⊆ D für eine gewisse offene Teilmenge D von Rn . Nun genüge x der Differentialgleichung
n
X
(11.11)
f j x(t) · x′j (t) = 0, t ∈ I ,
j=1
wobei f1 , . . . , fn : D → R alle in C(D) sind. Ziel ist es, mehr über die Funktion x in
Erfahrung zu bringen.
Das geht sicher dann, wenn ( f1 , . . . , fn ) : D → L(Rn , R) ein Gradientenfeld ist,
dh. wenn ( f1 , . . . , fn ) = dF für ein F ∈ C 1 (D). Man nennt (11.11) dann eine exakte
Differentialgleichung. In der Tat liest sich in diesem Fall (11.11) wegen der Kettenregel
(siehe auch Bemerkung 10.1.21) als
(F ◦ x)′ (t) = 0, t ∈ I ,
und daher F ◦ x ≡ c für eine gewisse reelle Konstante c.
Ist D ein offener Quader und sind die f j alle sogar C 1 , so ist gemäß Satz 11.5.6
∂
∂
fj =
fi , i, j ∈ {1, . . . , n} ,
∂xi
∂x j
eine hinreichende Bedingung dafür, dass (11.11) eine exakte Differentialgleichung ist.
Nun kann es sein, dass zwar (11.11) keine exakte Differentialgleichung ist, aber es
dennoch eine Funktion m : D → R gibt, sodass die aus (11.11) abgeleitete Differentialgleichung
X
X
m x(t) ·
f j x(t) · x′j (t) =
(m · f j ) x(t) · x′j (t) = 0, t ∈ I ,
n
n
j=1
j=1
eine solche ist. Dann folgt nämlich auch G ◦ x ≡ c für eine gewisse reelle Konstante c,
wobei G eine Stammfunktion des Gradientenfeldes (m · f1 , . . . , m · fn ) ist. Eine solche
Funktion m nennt man Integrierenden Faktor.
11.5.10 Beispiel (*). Sei b > 0 und y : (0, b) → R eine C 1 -Funktion, die der Differentialgleichung
4x + 3y(x)2 + 2xy(x)y′ = 0
(11.12)
genügt. Um diese Gleichung mit der in Bemerkung 11.5.9 vorgestellten Methode behandeln zu können, betrachten wir
!
!
x(t)
t
=
y(t)
y(t)
als Abbildung von (0, b) nach (0, b) × R. Dann schreibt sich unsere Gleichung als
!
!
x(t)
x(t)
f
· x′ (t) + g
· y′ (t) = 0 ,
(11.13)
y(t)
y(t)
wobei f (x, y)T = 4x + 3y2 und g (x, y)T = 2xy. Wegen
!
!
∂ x
∂ x
f
= 6y , 2y =
g
∂y y
∂x y
11.6. HOMOTOPIE UND EINFACHER ZUSAMMENHANG
115
ist (11.13) nicht exakt. Durch Multiplizieren mit m (x, y)T = x2 folgt aus (11.13) aber
!
!
!
!
x(t)
x(t)
x(t)
x(t)
m
·f
· x′ (t) + m
·g
· y′ (t) = 0 .
(11.14)
y(t)
y(t)
y(t)
y(t)
Wegen
!
!
∂
x
x
∂
2
2
(m · f )
(m · g)
= 6yx = 6x y =
∂y
∂x
y
y
zusammen mit Satz 11.5.6 ist (11.14) exakt.
Man sieht leicht, dass G (x, y)T = x4 +x3 y2 eine Stammfunktion von (m· f, m·g) ist.
Also muss G (x(t), y(t))T = c, t ∈ (0, b) für eine Konstante c ∈ R sein. Das bedeutet
t4 + t3 y2 (t) = c bzw.
c
y2 (t) = 3 − t .
t
Da dieser Ausdruck für alle t ∈ (0, b) nichtnegativ ist, muss c ≥ b4 . Also muss
r
c
− x, x ∈ (0, b) ,
y(x) = ε ·
x3
für gewisse ε ∈ {+1, −1}, c ∈ [b, +∞). Man überprüft sofort, dass auch jede derartige
Funktion tatsächlich eine Lösung von (11.12) ist.
11.6 Homotopie und einfacher Zusammenhang
Ehe wir den wichtigen Satz 11.6.4 beweisen können, brauchen wir noch eine grundlegende Begriffsbildung.
11.6.1 Definition. Sei D ⊆ Rn offen, und seien γ0 , γ1 : [a, b] → D zwei stetige Wege.
Eine stetige Abbildung Γ : [a, b] × [c, d] → D (c, d ∈ R, c < d) mit
Γ(t, c) = γ0 (t), Γ(t, d) = γ1 (t), t ∈ [a, b] ,
heißt Homotopie zwischen γ0 und γ1 .
Haben γ0 und γ1 gleichen Anfangs- und gleichen Endpunkt, dh. γ0 (a) = γ1 (a)
und γ0 (b) = γ1 (b), so heißen diese Wege homotop in D, wenn es eine Homotopie
Γ : [a, b] × [c, d] → D zwischen γ0 und γ1 gibt, sodass
Γ|{a}×[c,d] ≡ γ0 (a), Γ|{b}×[c,d] ≡ γ0 (b) .
Ein Gebiet D ⊆ Rn heißt einfach zusammenhängend, wenn je zwei stetige Wege mit
gleichen Anfangs- und gleichen Endpunkten homotop sind.
11.6.2 Bemerkung. Ist Γ : [a, b] × [c, d] → D eine Homotopie zwischen γ0 und γ1 , so
auch Γ̂ : [a, b] × [0, 1] → D, wobei
Γ̂(t, s) = Γ(t, sb + (1 − s)a) .
Also kann man für Homotopien immer oBdA. annehmen, dass [c, d] = [0, 1].
KAPITEL 11. WEGINTEGRALE
116
11.6.3 Beispiel. Ist D ⊆ Rn offen, und sind γ0 , γ1 : [a, b] → D zwei stetige Wege mit
gleichem Anfangs- und gleichem Endpunkt, sodass die Konvexkombinationen
γα (t) := α · γ1 (t) + (1 − α) · γ0 (t)
für alle α ∈ [0, 1] und alle t ∈ [a, b] in D liegen, so ist Γ(t, α) := γα (t) stetig auf
[a, b] × [0, 1]. Also sind γ0 und γ1 homotop.
Insbesondere sind konvexe und offene D einfach zusammenhängende Gebiete; vgl.
Beispiel 11.3.4.
11.6.4 Satz. Sei D ⊆ Rn offen und sei φ : D → L(Rn , X) ein lokales Gradientenfeld.
Sind γ0 , γ1 : [a, b] → D zwei stetige und stückweise stetig differenzierbare Wege mit
gleichen Anfangs- und gleichen Endpunkten, die homotop sind, so gilt
Z
Z
φ(x) dx .
φ(x) dx =
γ0
γ1
Ist D ein einfach zusammenhängendes Gebiet, so ist φ : D → L(Rn , X) genau dann ein
lokales Gradientenfeld wenn es ein Gradientenfeld ist.
Beweis. Sei Γ : [a, b] × [0, 1] → D eine Homotopie zwischen γ0 und γ1 wie in Definition 11.6.1. Voraussetzungsgemäß gibt es zu jedem x ∈ K := Γ([a, b] × [0, 1]) ein
0 < ρ x ≤ +∞ mit Uρx (x) ⊆ D8 , sodass φ|Uρx (x) ein Gradientenfeld ist. Gemäß Bemerkung 11.5.2 können wir die ρ x maximal wählen, sodass Uρx (x) ⊆ D und φ|Uρx (x) ein
Gradientenfeld ist.
Wäre nun ρ := inf{ρ x : x ∈ K} gleich Null, so gäbe es eine Folge (xn )n∈N aus
K mit limn→∞ ρ xn = 0. Da K als stetiges Bild einer kompakten Menge kompakt ist,
hat diese Folge eine gegen ein x ∈ K konvergente Teilfolge (xn( j) ) j∈N . Für alle hinreichend großen j ∈ N gilt daher xn( j) ∈ U ρ2x (x) und in Folge der Dreiecksungleichung
somit auch U ρ2x (xn( j) ) ⊆ Uρx (x). Also ist für alle hinreichend großen j das Vektorfeld
φ|U ρx (xn( j) ) ein Gradientenfeld und somit ρ2x ≤ ρ xn( j) , was aber lim j→∞ ρ xn( j) = 0 wider2
spricht.
Damit haben wir die Existenz eines ρ > 0 gezeigt, sodass für alle x ∈ D immer
Uρ (x) ⊆ D und φ|Uρ (x) ein Gradientenfeld ist. Gemäß Satz 6.3.3 gibt es ein η > 0,
sodass
max(|t1 − t2 |, |s1 − s2 |) = d∞ (t1 , s1 ), (t2 , s2 ) < η ⇒
kΓ(t1 , s1 ) − Γ(t2 , s2 )k∞ < ρ .
(11.15)
Seien a = t0 < t1 < · · · < t p = b, 0 = s0 < s1 · · · < s p = 1, sodass für alle j, k =
1, . . . , p die Ungleichung |t j − t j−1 |, |sk − sk−1 | < η gilt. Also verlaufen für j, k = 1, . . . , p
die Polygonzüge
−−−−−−−−−−−−−−−−−−−−→ −−−−−−−−−−−−−−−−→
α jk := Γ(t j−1 , sk−1 ) Γ(t j−1 , sk ), Γ(t j−1 , sk ) Γ(t j , sk )
und
8 Bezüglich
−−−−−−−−−−−−−−−−−−−−→ −−−−−−−−−−−−−−−−→
β jk := Γ(t j−1 , sk−1 ) Γ(t j , sk−1 ), Γ(t j , sk−1 ) Γ(t j , sk )
k.k∞ .
11.6. HOMOTOPIE UND EINFACHER ZUSAMMENHANG
ganz in Uρ (Γ(t j , sk )) ⊆ D. Mit Satz 11.4.1 folgt
Z
Z
0=
φ(x) dx −
α jk
Z
φ(x) dx +
−−−−−−−−−−−−−−−−−−−−→
Γ(t j−1 ,sk−1 ) Γ(t j−1 ,sk )
Z
φ(x) dx =
β jk
−−−−−−−−−−−−−−−−→
Γ(t j−1 ,sk ) Γ(t j ,sk )
−
117
φ(x) dx
Z
φ(x) dx −
−−−−−−−−−−−−−−−−−−−−→
Γ(t j−1 ,sk−1 ) Γ(t j ,sk−1 )
Z
−−−−−−−−−−−−−−−−→
Γ(t j ,sk−1 ) Γ(t j ,sk )
φ(x) dx .
Aufsummieren über j und k ergibt
0=
p Z
X
−−−−−−−−−−−−−−−−−−−−→
Γ(t j−1 ,sk−1 ) Γ(t j−1 ,sk )
j,k=1
−
φ(x) dx +
p Z
X
j,k=1
−−−−−−−−−−−−−−−−→
Γ(t j−1 ,sk ) Γ(t j ,sk )
p Z
X
j,k=1
−−−−−−−−−−−−−−−−−−−−→
Γ(t j−1 ,sk−1 ) Γ(t j ,sk−1 )
φ(x) dx −
φ(x) dx
p Z
X
−−−−−−−−−−−−−−−−→
Γ(t j ,sk−1 ) Γ(t j ,sk )
j,k=1
φ(x) dx .
Nach Indexverschiebungen (k
k + 1 bzw. j
j − 1) in den letzten beiden Summen
kürzen sich die meisten Summanden der ersten (zweiten) Summe mit welchen aus der
vierten (dritten) Summe. Übrig bleibt
0=
p Z
X
k=1
φ(x) dx +
−−−−−−−−−−−−−−−−→
Γ(t0 ,sk−1 ) Γ(t0 ,sk )
−
p Z
X
k=1
p Z
X
j=1
−−−−−−−−−−−−−−−−→
Γ(t j−1 ,s p ) Γ(t j ,s p )
−−−−−−−−−−−−−−−−→
Γ(t p ,sk−1 ) Γ(t p ,sk )
φ(x) dx
φ(x) dx −
p Z
X
j=1
−−−−−−−−−−−−−−−−→
Γ(t j−1 ,s0 ) Γ(t j ,s0 )
φ(x) dx .
Man beachte, dass Γ(t0 , s) = Γ(a, s) = γ0 (a) und Γ(t p , s) = Γ(b, s) = γ0 (b) für alle
−−−−−−−−−−−−−−−−→
−−−−−−−−−−−−−−−−→
s ∈ [0, 1]. Also sind die gerade Strecken Γ(t0 , sk−1 ) Γ(t0 , sk ) und Γ(t p , sk−1 ) Γ(t p , sk )
konstant, und somit verschwinden alle Wegintegrale in der ersten und in der dritten
Summe. Also erhalten wir
p Z
p Z
X
X
φ(x) dx .
(11.16)
φ(x) dx =
−−−−−−−−−−−−−−−−→
−−−−−−−−−−−−−−−−→
j=1
Γ(t j−1 ,s p ) Γ(t j ,s p )
j=1
Γ(t j−1 ,s0 ) Γ(t j ,s0 )
−−−−−−−−−−−−−−−−→
Für jedes j = 1, . . . , p sind aber γ0 |[t j−1 ,t j ] und Γ(t j−1 , s0 ) Γ(t j , s0 ) zwei stetige und
stückweise stetig differenzierbare Wege, welche den selben Anfangspunkt γ0 (t j−1 ) =
Γ(t j−1 , s0 ) und den selben Endpunkt γ0 (t j ) = Γ(t j , s0 ) haben. Aus (11.15) folgt zudem,
dass beide Wege innerhalb von Uρ (γ0 (t j )) ⊆ D verlaufen, worauf φ ein Gradientenfeld ist. Wegen Satz 11.4.1 erhalten wir somit, dass die Wegintegrale von φ über diese
beiden Wege übereinstimmen, dh.
Z
Z
φ(x) dx.,
φ(x) dx =
−−−−−−−−−−−−−−−−→
Γ(t j−1 ,s0 ) Γ(t j ,s0 )
γ0 |[t j−1 ,t j ]
Wir
R erhalten nach dem Aufsummieren über die j, dass die rechte Seite in (11.16) mit
φ(x) dx übereinstimmt. Entsprechend zeigt man, dass die linke Seite in (11.16) mit
Rγ0
φ(x) dx übereinstimmt. Also folgt die behauptete Gleichheit.
γ
1
KAPITEL 11. WEGINTEGRALE
118
Wenn D ein einfach zusammenhängendes Gebiet ist, dann sind zwei Wege
mit gleichem Anfangs- und Endpunkten immer homotop. Gemäß Satz 11.4.7 und
dem ersten Teil des aktuellen Satzes ist dann jedes lokale Gradientenfeld sogar ein
Gradientenfeld.
❑
11.7 Komplexe Wegintegrale
Wir wollen diesen Abschnitt mit einer Bemerkung aus der Linearen Algebra beginnen.
11.7.1 Bemerkung. Vektorräume X und Y über dem Skalarkörper C lassen sich klarerweise auch als Vektorräume über R auffassen. Ist dabei A : X → Y eine C-lineare
Abbildung, so ist A sicherlich auch R-linear. Die Umkehrung gilt im Allgemeinen sicher nicht, wie etwa das Beispiel der Vektorräume X = C = Y und A(ξ + iη) = 3ξ + iη
zeigt.
Wir fragen also, wann eine R-lineare Abbildung A : X → Y auch C-linear ist. Eine
offensichtlich notwendige Bedingung ist
A(ix) = iA(x), für alle x ∈ X .
(11.17)
Diese Bedingung ist auch hinreichend, da wegen der R-Linearität A(x+y) = A(x)+A(y)
für x, y ∈ X und da (ξ, η ∈ R, x ∈ X)
A (ξ + iη)x = A(ξx) + A(iηx) = A(ξx) + iA(ηx) = ξA(x) + iηA(x) = (ξ + iη)A(x) .
Für ein R-lineares A : X → Y gilt (11.17) sicher schon, wenn A(ix) = iA(x) für alle x
aus einer Basis von X (als Vektorraum über R) gilt.
Da 1, i eine Basis von C (über R) abgibt, trifft im Falle X = C Gleichung (11.17)
genau dann zu, wenn
A(i) = iA(1) .
(11.18)
In dem Fall ist wegen
A((ξ + iη)) = A((ξ + iη) · 1) = (ξ + iη) · A(1)
(11.19)
die Abbildung A nichts anderes, als die skalare Multiplikation mit dem Vektor A(1) ∈
Y.
Im Spezialfall X = Y = C R2 können wir jede R-lineare Abbildung A : C → C
T
T
11 α12
als 2 × 2-Matrix A = αα21
α22 anschreiben. Wegen 1 (1, 0) , i (0, 1) und weil für
T
2
ξ + iη (ξ, η) aus C R
!
! !
−η
0 −1 ξ
i(ξ + iη) = −η + iξ =
ξ
1 0 η
gilt, bedeutet Bedingung (11.18) dann gerade
!
!
!
!
−α21
0 −1 α11
α12
.
=
=
1 0 α21
α11
α22
Das ist äquivalent dazu, dass A von der speziellen Form
!
!
α11 α12
a −b
=
α21 α22
b a
(11.20)
ist. Wegen (11.19) stellt A gerade die Multiplikation mit der festen komplexen Zahl
A(1) = a + ib dar.
11.8. HOLOMORPHE FUNKTIONEN
119
11.7.2 Definition. Ist D ⊆ C, Y ein Banachraum über C, f : D → Y eine Funktion und
γ : [a, b] → D ein Weg, so ist das komplexe Wegintegral definiert durch
Z
f (z) dz := lim
|R|→0
γ
n(R)
X
j=1
γ(ξ j ) − γ(ξ j−1 ) f γ(α j ) ,
(11.21)
falls dieser Limes existiert.
Bemerkung 11.7.1 lässt sich dazu benutzen, um komplexe Wegintegrale auf die uns
schon bekannten Wegintegral zurückzuführen.
Man beachte, dass die Summanden in (11.21) Produkte von komplexen Zahlen mit
Vektoren aus Y sind. Zum Vergleich dazu sind die Summanden in (11.4) Elemente
aus X, die man erhält, wenn man γ(ξ j ) − γ(ξ j−1 ) ∈ Rn auf die lineare Abbildung
φ γ(α j ) ∈ L(Rn , X) anwendet.
Um dennoch komplexe Wegintegrale als Wegintegrale betrachten zu können, identifizieren wir C mit R2 . Dann lässt sich gemäß Bemerkung 11.7.1 die komplexe Multiplikation als Anwendung eins Zweivektors auf eine lineare Abbildung aus L(R2 , Y)
wie in (11.19) realisieren.
Definieren wir also φ f : D → L(R2 , Y) durch φ f (z) = ( ηξ 7→ (ξ + iη) f (z)), so
können wir (11.21) als
Z
f (z) dz = lim
|R|→0
γ
n(R)
X
j=1
φ f γ(α j ) γ(ξ j ) − γ(ξ j−1 ) =
Z
φ f (x) dx
(11.22)
γ
anschreiben, wobei (γ(ξ j ) − γ(ξ j−1 )) jetzt als Element von C R2 zu interpretieren ist,
das auf φ f γ(α j ) ∈ L(R2 , Y) angewandt wird.
Die Stetigkeit von φ f ist wegen z 7→ φ f (z)e1 = f (z) und z 7→ φ f (z)e2 = i f (z) gemäß
Bemerkung 11.2.4 äquivalent zur Stetigkeit von f . Also existiert für stetiges f sowie
stetiges und rektifizierbares γ gemäß Fakta 11.2.3, 2, das Integral in (11.22). Ist γ sogar
stetig und stückweise stetig differenzierbar, so folgt aus Satz 11.2.5
Z
f (z) dz =
γ
Z
φ f (x) dx =
γ
Z
b
φ f (γ(t)) γ′ (t) dt =
Z
a
a
b
γ′ (t) · f (γ(t)) dt .
(11.23)
Wegen (11.7) lässt sich die Norm eines komplexen Wegintegrals folgendermaßen
abschätzen:
Z
f
(z)
dz
(11.24)
≤ max k f ◦ γ(t)k · ℓ(γ) .
γ
t∈[a,b]
11.8 Holomorphe Funktionen
In diesem Abschnitt sei f : D → Y eine Funktion, wobei D ⊆ R2 C offen ist und
wobei Y ein Banachraum über dem Skalarkörper C ist.
Ist f in einem Punkt z = x+iy (x, y)T ∈ D differenzierbar im Sinne von Definition
10.1.13, so ist d f (z) dabei eine R-lineare Abbildung von R2 C nach Y mit
d f (z)v =
∂f
∂f
∂f
(z) = v1 (z) + v2 (z) ∈ Y, für alle v = (v1 , v2 )T ∈ R2 ( C) .
∂v
∂x
∂y
KAPITEL 11. WEGINTEGRALE
120
Gemäß (11.18) ist somit d f (z) genau dann C-linear, wenn
∂f
∂f
(z) = i (z) ,
∂y
∂x
(11.25)
denn es gilt ja 1 (1, 0)T , i (0, 1)T , wenn man komplexe Zahlen als Elemente von
R2 betrachtet. In dem Fall gilt dann wegen (11.19) für v = (v1 , v2 )T ∈ R2
!
∂f
1
d f (z)v = (v1 + iv2 ) · d f (z)
= (v1 + iv2 ) ·
(z) .
(11.26)
0
∂x
11.8.1 Bemerkung. Ist Y = C und setzen wir u := Re f und v := Im f , so gilt
∂u
(z)
d f (z) = ∂x
∂v
∂x (z)
und die Vektorgleichung (11.25) lässt sich als
∂u
∂y (z)
∂v
∂y (z)
,
∂v
∂v
∂u
∂u
(z) = − (z),
(z) =
(z)
∂y
∂x
∂y
∂x
schreiben. Man spricht von den Cauchy-Riemannschen Differentialgleichungen.
11.8.2 Lemma. Sei D ⊆ C offen, Y ein Banachraum über C und f : D → Y eine
Funktion. Für ein z ∈ D sind folgende beiden Aussagen äquivalent:
f ist bei z im Sinne von Definition 10.1.13 differenzierbar, sodass d f (z) eine
C-lineare Abbildung ist bzw. äquivalent dazu, dass (11.25) gilt.
Der Grenzwert – man spricht von der komplexen Ableitung –
df
f (z + h) − f (z)
(z) = f ′ (z) := lim
h→0
dz
h
existiert in C.
Treffen diese Aussagen zu, so heißt f bei z komplex differenzierbar und es gilt
f ′ (z) =
∂f
∂f
(z) = −i ·
(z) .
∂x
∂y
(11.27)
Außerdem ist f bei z stetig.
Ist f bei allen z ∈ D komplex differenzierbar, so gilt f ∈ C 1 (D) genau dann, wenn
z 7→ f ′ (z) als Abbildung von D nach Y stetig ist.
Beweis. Gemäß Definition 10.1.13 und wegen der Äquivalenz der Normen k.k2 = |.|
und k.k∞ auf C R2 ist f bei z genau dann differenzierbar, wenn
f (z + h) = f (z) + d f (z)h + |h|ε(h), h , 0 ,
(11.28)
für irgendeine Funktion ε : (D−z) \ {0} → Y mit limh→0 ε(h) = 0. Der Ausdruck
d f (z)h
ist dabei die Anwendung von h = h1 + ih2 , interpretiert als Element hh12 von R2 , auf
lineare Abbildung d f (z) ∈ L(R2 , Y)
11.8. HOLOMORPHE FUNKTIONEN
121
Ist dabei (11.25) erfüllt, so folgt aus (11.26), dass d f (z)h = h · g(z) mit g(z) =
= −i · ∂∂yf (z) ∈ Y. Daraus erhält man
∂f
∂x (z)
lim
h→0
|h|
f (z + h) − f (z)
= g(z) + lim
· ε(h) = g(z) ,
h→0 h
h
da k |h|
h · ε(h)k = kε(h)k → 0 für h → 0.
Falls umgekehrt der komplexe Grenzwert g(z) := limh→0
f (z)
−
g(z)
für h , 0 unmittelbar
folgt mit ε(h) := |h|h f (z+h)−
h
f (z+h)− f (z)
h
existiert, so
f (z + h) = f (z) + h · g(z) + |h| ε(h), h , 0 ,
wobei ε(h) → 0 für h → 0. Da die Ableitung d f (z) eindeutig ist, folgt hieraus d f (z)h =
h · g(z) und damit die C-Linearität von d f (z). Wegen Korollar 10.1.14 ist f bei z stetig.
Die letzte Aussage folgt unmittelbar aus (11.27).
❑
11.8.3 Definition. Sei D ⊆ C offen und Y ein Banachraum über dem Skalarkörper C.
Eine Funktion f : D → Y heißt holomorph auf D, falls sie bei allen Punkten z ∈ D
komplex differenzierbar ist und die Funktion z 7→ f ′ (z) stetig ist.
Mit einiger Mühe lässt sich zeigen, dass die Forderung, dass z 7→ f ′ (z) stetig ist, in
dieser Definition weggelassen werden kann; vgl. Satz 11.9.2.
11.8.4 Beispiel.
(i) Ist y ∈ Y fest, und gilt f (z) = y, z ∈ C, so ist f an allen Punkten z ∈ C komplex
differenzierbar mit
f ′ (z) = lim
h→0
f (z + h) − f (z)
= 0 (∈ Y) .
h
Da z 7→ 0 als Abbildung von C nach Y stetig ist, ist f holomorph.
(ii) Für die Funktion f : z 7→ z von C nach C, dh. f = idC , gilt an jedem Punkt z ∈ C
f ′ (z) = lim
h→0
(z + h) − z
f (z + h) − f (z)
= lim
=1.
h→0
h
h
Da die konstante 1-Funktion stetig ist, folgt die Holomorphie von f .
(iii) Für die Funktion f : z 7→
z ∈ C \ {0}
1
z
als Abbildung von C \ {0} nach C gilt an jedem Punkt
f ′ (z) = lim
h→0
Da z 7→
von f .
− z12
1
z+h
−
h
1
z
z − (z + h)
1
=− 2.
h→0 hz(z + h)
z
= lim
als Abbildung von C \ {0} nach C stetig ist, folgt die Holomorphie
11.8.5 Proposition. Seien D, G ⊆ C offen, Y ein komplexer Banachraum, α, β ∈ C und
f, f1 , f2 : D → Y, φ : D → C sowie g : G → Y Funktionen. Dann gelten folgende
Aussagen:
KAPITEL 11. WEGINTEGRALE
122
Sind f1 und f2 in z ∈ D komplex differenzierbar, so ist es auch α f1 +β f2 : D → Y,
wobei (α f1 + β f2 )′ (z) = α f1′ (z) + β f2′ (z). Sind f1 und f2 holomorph auf D, so ist
es auch α f1 + β f2 .
Sind φ und f in z ∈ D komplex differenzierbar, so ist es auch φ · f : D → Y,
wobei (Produktregel)
(φ · f )′ (z) = φ′ (z) f (z) + φ(z) f ′ (z) .
Sind f und φ holomorph auf D, so ist es auch φ · f .
Sind φ und f in z ∈ D komplex differenzierbar mit φ(z) , 0, so ist es auch
f
9
φ : {z ∈ D : φ(z) , 0} → Y , wobei (Quotientenregel)
!′
f
φ(z) f ′ (z) − φ′ (z) f (z)
(z) =
.
φ
φ(z)2
Sind f und φ holomorph auf {z ∈ D : φ(z) , 0}, so ist es auch φf .
Ist z ∈ D, sodass φ(z) ∈ G, und sind φ im Punkt z ∈ D und g im Punkt φ(z)
komplex differenzierbar, so ist g ◦ φ : φ−1 (G) → Y 9 im Punkt z komplex differenzierbar, wobei (Kettenregel)
(g ◦ φ)′ (z) = φ′ (z) · g′ (φ(z)) .
Sind φ und g holomorph, so ist es auch g ◦ φ : φ−1 (G) → Y.
Beweis. Linearität, Produktregel und Quotientenregel zeigt man fast genauso, wie die
fürs reelle Differenzieren; vgl. Satz 7.1.7. Die Grenzübergänge limh→0 sind dabei aber
in C zu nehmen.
Für die Kettenregel sei z ∈ D mit φ(z) ∈ G derart, dass φ im Punkt z und g im Punkt
φ(z) komplex differenzierbar ist. Für |h| hinreichend klein gilt dann
g ◦ φ(z + h) − g ◦ φ(z) φ(z + h) − φ(z)
=
· r(φ(z + h)) ,
h
h
für w , φ(z) und r(φ(z)) := g′ (φ(z)) definiert
wobei r : G → Y durch r(w) = g(w)−g(φ(z))
w−φ(z)
ist. Wegen der komplexen Differenzierbarkeit von g ist r bei φ(z) stetig, wodurch
φ(z + h) − φ(z)
g ◦ φ(z + h) − g ◦ φ(z)
= lim
· r(lim φ(z + h)) = φ′ (z) · g′ (φ(z)) .
h→0
h→0
h→0
h
h
lim
Sind φ und g holomorph, so gilt für alle z ∈ φ−1 (G), dass (g ◦ φ)′ (z) = φ′ (z) · g′ (φ(z)),
wobei die rechte Seite als Produkt stetiger Funktionen stetig ist. Also ist auch (g ◦ φ)′
stetig.
❑
11.8.6 Beispiel.
(i) Durch vollständige Induktion nach n ∈ N ∪ {0} folgt aus (z 7→ z)′ = 1 zusammen
mit der Produktregel, dass auch z 7→ zn auf C holomorph ist, wobei (z 7→ zn )′ (w) =
nwn−1 .
9 Man beachte, dass der Definitionsbereich dieser Funktion als Urbild einer offenen Menge unter der
stetigen Funktion φ selber offen ist.
11.8. HOLOMORPHE FUNKTIONEN
123
(ii) Durch wiederholte Anwendung von Proposition 11.8.5 folgt, dass alle Polynome
f (z) = a0 + a1 z + · · · + an zn mit festen a0 , . . . , an ∈ Y auf C holomorph sind. Dabei
gilt f ′ (z) = a1 + 2za2 + · · · + nzn−1 an .
(iii) Mit der Quotientenregel zeigt man allgemeiner, dass f : C \ {w} mit (N ∈ N,
w ∈ C und a−N , . . . , aN ∈ Y fest)
f (z) =
N
X
n=−N
(z − w)n an
holomorph ist, wobei
f ′ (z) =
N
X
n=−N
n(z − w)n−1 an .
(iv) Die Funktion exp : C → C ist auch holomorph, wobei exp′ (z) = exp(z). Das folgt
zum Beispiel aus der Tatsache, dass für f : R → C, t 7→ exp(wt) wegen der
Rechnung in Beispiel 7.1.4 f ′ (t) = w exp(wt) gilt. Daraus folgt dann
∂
∂
exp(x + iy) = exp(iy) exp(x) = exp(x + iy) und
∂x
∂x
∂
∂
exp(x + iy) = exp(x) exp(iy) = i exp(x + iy) .
∂y
∂x
Da diese Funktionen auf C stetig sind, erhalten wir exp ∈ C 1 (C), wobei offensichtlich auch (11.25) erfüllt ist. Also ist exp holomorph, wobei wegen (11.27)
exp′ (z) = exp(z).
Die Tatsache, dass f : D → Y holomorph ist, lässt sich auch von einer anderen
Seite beleuchten. Dazu betrachte
man das stetig differenzierbare Vektorfeld φ f : D →
L(R2 , Y) durch φ f (z) = ( ηξ 7→ (ξ + iη) f (z)). Aus (11.25) folgt dann (z = x + iy)
∂
∂
∂f
∂
φ f (z)e1 =
f (z) = i (z) =
φ f (z)e2 .
∂y
∂y
∂x
∂x
Gemäß Satz 11.5.6 ist φ f ein lokales Gradientenfeld, und wir können Satz 11.6.4 anwenden, um folgendes Korollar herzuleiten.
11.8.7 Korollar. Sei f : D → Y holomorph auf der offenen Menge D ⊆ C. Sind
γ0 , γ1 : [a, b] → D zwei stetige und stückweise stetig differenzierbare Wege mit gleichen Anfangs- und gleichen Endpunkten, die homotop in D sind, so gilt
Z
Z
f (z) dz .
f (z) dz =
γ0
γ1
Ist D einfach zusammenhängend, dann gibt es eine, bis auf eine additive Konstante aus
Y eindeutige, holomorphe Funktion F mit F ′ (z) = f (z) für alle z ∈ D. Dabei gilt
Z
f (ζ) dζ
F(z) − F(w) =
γ
für alle z, w ∈ D. Hier ist die rechte Seite ein komplexes Wegintegral und γ irgendein
stetiger, stückweise stetig differenzierbarer und in D verlaufender Weg mit Anfangspunkt w und Endpunkt z.
KAPITEL 11. WEGINTEGRALE
124
R
R
R
R
Beweis. Wegen (11.22) gilt γ f (z) dz = γ φ f (x) dx und γ f (z) dz = γ φ f (x) dx.
0
0
1
1
Also folgt die erste Aussage sofort aus Satz 11.6.4.
Ist D einfach zusammenhängend, so folgt aus demselben Satz, dass φ f ein Gradientenfeld ist, dh. φ f = dF für ein stetig differenzierbares F : D → Y. Dieses F ist
gemäß Korollar 11.4.4 eindeutig bis auf eine additive Konstante aus Y. Da e1 , e2 eine
Basis von R2 ist, bedeutet aber φ f = dF nichts anderes, als
i·
∂F
∂F
(z) = i · φ f (z) e1 = i · f (z) = φ f (z) e2 =
(z) .
∂x
∂y
Also folgt die Holomorphie
von F, wobei wegen (11.27) F ′ = f . Schließlich erhält
R
man F(z) − F(w) = γ f (ζ) dζ unmittelbar aus (11.22) und Satz 11.4.1.
❑
11.8.8 Bemerkung. Angenommen D ⊆ C ist offen und w, z ∈ D sowie 0 < r1 < r2 <
+∞ derart, dass Kr1 (z) ⊆ Kr2 (w) und Kr2 (w) \ Ur1 (z) ⊆ D, wobei wir hier die Kugeln
bzgl. k.k2 = |.| meinen. Wir schließen dabei den Fall z = w nicht aus. Weiters seien
γ1 , γ2 : [0, 2π] → D die Wege γ1 (t) = z + r1 exp(it) bzw. γ2 (t) = w + r2 exp(it), für die
γ1 ([0, 2π]) = Kr1 (z) \ Ur1 (z) ⊆ Kr2 (w) und γ2 ([0, 2π]) = Kr2 (w) \ Ur2 (w) gilt.
Wir behaupten, dass für jedes holomorphe f : D → Y
Z
Z
f (z) dz .
(11.29)
f (z) dz =
γ1
γ2
Dazu betrachten wir für j = 1, 2 die Wege β j : [−1, 2π + 1] definiert durch
−t
, falls t ∈ [−1, 0)
2 γ1 (0) + γ2 (0) + (1 + t)γ j (0)
β j (t) =
γ
(t)
, falls t ∈ [0, 2π]
j
t−2π γ1 (0) + γ2 (0) + (1 − t + 2π)γ j(0) , falls t ∈ (2π, 2π + 1]
2
Beide Wege sind geschlossen, und
beide haben den Anfangs- bzw.
Endpunkt m := 12 γ1 (0) + γ2 (0) .
β j setzt sich zusammen aus
−−−−−→
dem zur Strecke mγ j (0) äquivalenten Teil β j |[−1,0] , aus γ j =
β j |[0,2π] und aus dem zur Strecke
−−−−−→
−−−−−→
γ j (0)m = mγ j (0)− äquivalenten
Teil β j |[2π,2π+1] .
z
β1 |[−1,0]
β1 |[2π,2π+1]
γ1 = β1 |[0,2π]
w
m
β2 |[−1,0]
β2 |[2π,2π+1]
γ2 = β2 |[0,2π]
Da Kr2 (w) konvex ist, verlaufen die Wege β1 und β2 ganz in Kr2 (w). Außerdem gilt
für alle ζ ∈ Kr2 (w)
Re ζ = Re w + Re(ζ − w) ≤ Re w + |ζ − w| ≤ Re w + r2 ,
11.8. HOLOMORPHE FUNKTIONEN
125
und somit
Re z + r1 = Re γ1 (0) ≤ Re w + r2 = Re γ2 (0) .
−−−−−−−−−→
Da die Bilder von β j |[−1,0] und β j |[2π,2π+1] ganz im Bild von γ1 (0)γ2 (0) enthalten sind,
sind diese auch ganz in der konvexen Teilmenge {ζ ∈ C : Re ζ ≥ Re z + r1 } von C
enthalten. Wegen Re ζ − Re z ≤ |ζ − z| gilt {ζ ∈ C : Re ζ ≥ Re z + r1 } ⊆ C \ Ur1 (z),
womit die Wege β1 und β2 ganz in Kr2 (w) \ Ur1 (z) ⊆ D verlaufen.
Definieren wir Γ : [−1, 2π + 1] × [0, 1] → C durch
Γ(t, s) := sβ1 (t) + (1 − s)β2 (t) ,
(11.30)
so folgt aus Konvexitätsgründen auch, dass das Bild von Γ ganz in Kr2 (w) liegt.
Andererseits gilt für t ∈ [0, 2π] und s ∈ [0, 1] wegen der zu Kr1 (z) ⊆ Kr2 (w) äquivalenten Tatsache, dass |z−w|+r1 ≤ r2 , und wegen der umgekehrten Dreiecksungleichung
r1 = (1 − s)r1 + sr1 ≤ (1 − s)r2 + sr1 − (1 − s)|z − w| ≤
((1 − s)r2 + sr1 ) · exp(it) − (1 − s)(z − w) = |sγ1 (t) + (1 − s)γ2 (t) − z| .
Somit liegt Γ(t, s) immer außerhalb von Ur1 (z).
Zudem liegt für t ∈ [−1, 0] ∪ [2π, 2π + 1] und s ∈ [0, 1] der Punkt Γ(t, s) wieder aus
Konvexitätsgründen ganz in {ζ ∈ C : Re ζ ≥ Re z + r1 }.
Insgesamt liegt das Bild von Γ in Kr2 (w) \ Ur1 (z) ⊆ D. Also sind die Wege β1 und
β2 homotop in D. Gemäß Korollar 11.8.7 gilt für die auf D holomorphe Funktion f
Z
Z
f (z) dz .
f (z) dz =
β1
β2
Da β j |[−1,0] äquivalent zu β j |[2π,2π+1] − ist, heben sich die Wegintegrale über die linearen
Teile von β j für j = 1, 2 auf (vgl. Fakta 11.2.3, 1), und es folgt (11.29).
11.8.9 Satz (Cauchysche Integralformel). Sei f : D → Y holomorph mit offenem
D ⊆ C, und seien w ∈ C und ρ > 0 derart, dass Kρ (w) ⊆ D.
Ist z ∈ Uρ (w), und ist γ : [0, 2π] → D der Weg γρ : t 7→ w + ρ · exp(it) oder ein in
D \ {z} zu γρ homotoper, stetiger und stückweise stetig differenzierbarer Weg, so gilt
Z
f (ζ)
1
dζ .
(11.31)
f (z) =
2πi γ ζ − z
Beweis. Man betrachte die Funktion
f (η) − f (z)
G(η) =
, η ∈ D \ {z} .
η−z
f (z)
Nach Proposition 11.8.5 ist G : D \ {z} → Y holomorph. Da limη→z f (η)−
existiert,
η−z
′
kann man G auf D durch G(z) := f (z) stetig fortsetzen; vgl. Bemerkung 6.4.4.
Wegen Kρ (w)\Ur (z) ⊆ D\{z} für ein hinreichend kleines r > 0 folgt aus Bemerkung
11.8.8, dass
Z
Z
G(ζ) dζ ,
G(ζ) dζ =
γρ
µǫ
für alle ǫ ∈ (0, r], wobei µǫ (t) = z + ǫ · exp(it). Andererseits kann man den Betrag der
rechten Seite mit Hilfe von (11.24) nach oben abschätzen durch
Z 2π
|µ′ǫ (t)| dt = sup kG(η)k · 2πǫ .
max kG ◦ µǫ (t)k · ℓ(µǫ ) ≤ sup kG(η)k ·
t∈[0,2π]
η∈Kρ (w)
0
η∈Kρ (w)
KAPITEL 11. WEGINTEGRALE
126
Da G auf das kompakte Kρ (w) stetig fortgesetzt wurde, sind obige Suprema endlich.
Damit geht der Ausdruck rechts für ǫ ց 0 gegen Null. Weil komplexe Wegintegrale
linear im Integranden sind, folgt
Z
Z
Z
f (ζ)
1
G(ζ) dζ =
0=
dζ − f (z) ·
dζ .
γρ ζ − z
γρ
γρ ζ − z
Wieder mit Bemerkung 11.8.8 und mit Hilfe von (11.23) berechnet man
Z
Z
1
1
dζ =
dζ = 2πi .
γρ ζ − z
µr ζ − z
Somit folgt (11.31) für γ = γρ . Ist γ in D \ {z} homotop zu γρ , so folgt (11.31) aus
Korollar 11.8.7.
❑
Schreiben wir (11.31) mit Hilfe von (11.23) als Riemann Integral, so erhalten wir
für alle z ∈ Uρ (w)
Z
Z 2π
f (ζ)
1
f (w + ρ exp(it))
1
dζ =
dt .
(11.32)
ρ exp(it) ·
f (z) =
2πi γρ ζ − z
2π 0
w + ρ exp(it) − z
11.8.10 Korollar. Ist f : D → Y holomorph mit offenem D ⊆ Y, so ist auch f ′ : D → Y
holomorph. Infolge sind alle Funktionen f (n) : D → Y, n ∈ N rekursiv definiert durch
f (n+1) = ( f (n) )′ , holomorph auf D. Insbesondere ist f ∈ C ∞ (D).
Dabei gilt für jedes w ∈ D und ρ > 0 mit Kρ (w) ⊆ D
Z
n!
f (ζ)
dζ für alle z ∈ Uρ (w) .
(11.33)
f (n) (z) =
2πi γ (ζ − z)n+1
Hier ist γ : [0, 2π] → D der Weg γρ : t 7→ w + ρ · exp(it) oder ein in D \ {z} zu γρ
homotoper, stetiger und stückweise stetig differenzierbarer Weg.
f (w+ρ exp(it))
Beweis. Sei ρ > 0 so, dass Kρ (w) ⊆ D. Der Integrand ht (z) := ρ exp(it) · w+ρ
exp(it)−z
der rechten Seite von (11.32) ist offensichtlich stetig als Funktion von (z, t) ∈ Uρ (w) ×
[0, 2π] nach Y; vgl. Korollar 6.1.8. Wie wir in Beispiel 11.8.6 gesehen haben, ist ht (z)
als Funktion der Variable z ∈ Uρ (w) holomorph mit (z = x + iy)
∂ht
∂ht
f (w + ρ exp(it))
.
(z) = −i ·
(z) = h′t (z) = ρ exp(it) ·
∂x
∂y
(w + ρ exp(it) − z)2
Diese Funktion ist stetig als Funktion von (z, t) ∈ Uρ (w) × [0, 2π] nach Y; vgl. Korollar
6.1.8. Insbesondere sind die Voraussetzungen von Korollar 8.7.12 (siehe auch (9.19))
erfüllt, und wir erhalten für z ∈ Uρ (w)
1
f (z) =
2π
′
Z
0
2π
∂
ht (z) dt =
∂x
Z 2π
Z
1
f (ζ)
f (w + ρ exp(it))
1
ρ exp(it) ·
dt =
dζ .
2π 0
2πi γρ (ζ − z)2
(w + ρ exp(it) − z)2
Nun ist h′t : Uρ (w) → Y ebenfalls holomorph mit
∂h′
∂h′t
f (w + ρ exp(it))
.
(z) = −i · t (z) = h′′t (z) = ρ exp(it) · 2
∂x
∂y
(w + ρ exp(it) − z)3
11.8. HOLOMORPHE FUNKTIONEN
127
Diese Funktion ist wieder stetig als Funktion von (z, t) ∈ Uρ (w) × [0, 2π] nach Y. Nach
Korollar 8.7.12 (siehe auch (9.19)) folgt für z ∈ Uρ (w)
1
∂f′
(z) =
∂x
2π
Z
2π
0
∂ ′
1
ht (z) dt =
∂x
2π
Z
0
2π
−i ·
∂ ′
∂f′
ht (z) dt = −i ·
(z) .
∂y
∂y
wobei diese Funktion gemäß Korollar 8.7.9 (siehe auch (9.18)) stetig von z ∈ Uρ (w)
abhängt. Es folgt f ′ ∈ C 1 (D), und nach Lemma 11.8.2 ist f ′ auf Uρ (w) holomorph mit
∂f′
1
( f ) (z) =
(z) =
∂x
2π
′ ′
Z
2π
h′′t (z) dt
0
2
=
2πi
Z
γρ
f (ζ)
dζ .
(ζ − z)3
Insbesondere gilt f ∈ C 2 (Uρ (w)). Da w ∈ D beliebig war, gilt f ∈ C 2 (D), und – da
Holomorphie offenbar eine lokale Eigenschaft ist – ist f ′ holomorph auf D.
Verfährt man induktiv weiter, so folgt insbesondere (11.33) und f ∈ C n (D) für alle
n ∈ N, wobei γ = γρ in (11.33). Für in D \ {z} zu γρ homotope γ folgt (11.33) aus
Korollar 11.8.7.
❑
11.8.11 Korollar (Satz von Liouville). Jedes auf ganz C holomorphe und beschränkte
f : C → Y ist eine konstante Funktion.
Beweis. Es gelte k f (z)k ≤ M, z ∈ C. Ist ρ > 0, w ∈ C und γ(t) = w + ρ · exp(it), so folgt
wegen (11.33) und (11.24)
Z
f (ζ)
1
M
1
1 ′
M · 2πρ =
.
dζ ≤
k f (w)k =
2π γ (ζ − w)2 2π ρ2
ρ
Da wir ρ > 0 beliebig groß wählen können, folgt f ′ (w) = 0. Da auch 0′ = 0, folgt aus
der Eindeutigkeitsaussage in Korollar 11.8.7, dass f konstant ist.
❑
Ein stetiger Weg γ : [a, b] → D heißt geschlossen, wenn γ(a) = γ(b).
11.8.12 Satz (Satz von Morera). Für ein offenes D ⊆ C und eine Funktion f : D → Y
sind folgende Aussagen äquivalent:
f ist holomorph.
f ist stetig und zu jedem w ∈ D gibt es ein offenes D(w) mit w ∈ D(w) ⊆ D,
sodass
Z
f (ζ) dζ = 0
(11.34)
γ
für alle geschlossenen, achsenparallelen Polygonzüge γ in D(w).
Das Vektorfeld φ f : D → L(R2 , Y) definiert durch φ f (z) = ( ηξ 7→ (ξ + iη) f (z))
ist ein lokales Gradientenfeld.
In dem Fall gilt (11.34) für alle einfach zusammenhängenden Gebiete D(w) mit w ∈
D(w) ⊆ D, etwa für alle offene, in D enthaltenen Kugeln um w.
KAPITEL 11. WEGINTEGRALE
128
Beweis. Ist f holomorph
und D(w) einfach zusammenhängendes Gebiet mit w ∈
R
D(w) ⊆ D, so folgt γ f (ζ) dζ = 0 sofort aus Korollar 11.8.7. Außerdem ist f stetig;
vgl. Lemma 11.8.2.
Sei nun f stetig und gelte (11.34) für jedes w ∈ D und jeden geschlossenen, achsenparallelen Polygonzug γ in D(w) mit einem offenen D(w), sodass w ∈ D(w) ⊆ D.
Wegen Bemerkung 11.2.4 ist die Stetigkeit von f zu der von φ f : D → L(R2 , Y) äquivalent. Gemäß (11.22) gilt
Z
Z
φ f (x) dx
f (ζ) dζ =
0=
γ
γ
für das Vektorfeld φ f |D(w) : D(w) → L(R2 , Y). Nach Bemerkung 11.4.8 sind daher die
Voraussetzungen für Satz 11.4.7 für φ f : D(w) → L(R2 , Y) erfüllt. Somit gilt φ f = dF
für ein Y-wertiges F ∈ C 1 (D(w)). Definitionsgemäß ist daher φ f : D → L(R2 , Y) ein
lokales Gradientenfeld.
Sei schließlich φ f : D → L(R2 , Y) ein lokales Gradientenfeld. Da e1 , e2 eine Basis
von R2 ist, bedeutet aber φ f = dF auf einer offenen, w enthaltenden Menge D(w) ⊆ D
nichts anderes, als
i·
∂F
∂F
(z) = i · φ f (z) e1 = i · f (z) = φ f (z) e2 =
(z) .
∂x
∂y
Damit folgt die Holomorphie von F auf D(w), wobei wegen (11.27) F ′ = f . Gemäß
Korollar 11.8.10 ist auch F ′ = f auf D(w) holomorph. Da w beliebig war, und da
Holomorphie eine lokale Eigenschaft ist, folgt die Behauptung.
❑
11.8.13 Lemma. Sei D ⊆ C offen, und fn : D → Y, n ∈ N, eine Folge holomorpher
Funktionen, die lokal gleichmäßig auf D gegen eine Funktion f : D → Y konvergiert,
dh. für jede kompakte Teilmenge K ⊆ D konvergiert ( fn |K )n∈N gleichmäßig auf K gegen
f |K . Dann ist auch f holomorph.
Beweis. Wähle zu w ∈ D die offene Menge D(w) wie Satz 11.8.12. Gemäß dieses
Satzes können wir sie sogar unabhängig von n so wählen, dass für alle n ∈ N
Z
fn (ζ) dζ = 0 ,
γ
wenn nur γ : [0, m] → D(w) ein geschlossener, achsenparalleler Polygonzug ist. K :=
γ([0, m]) ist als stetiges Bild einer kompakten Menge selber kompakt. Nun stimmt
wegen (11.23) obiges Wegintegral überein mit
Z m
γ′ (t) · fn (γ(t)) dt = 0 .
0
′
′
Wegen kγ (t) · fn (γ(t)) − γ (t) · f (γ(t))k ≤ k fn − f k∞,K · kγ′ k∞,[0,m] , t ∈ [0, m], und da γ ein
Polygonzug ist und daher kγ′ k∞,[0,m] < +∞, konvergiert die Funktionenfolge γ′ · fn ◦ γ
gleichmäßig gegen γ′ · f ◦ γ auf [0, m]. Aus Satz 8.7.2 (siehe auch (9.17)) folgt
Z m
Z m
Z
γ′ (t) · fn (γ(t)) dt = 0 .
γ′ (t) · f (γ(t)) dt = lim
f (ζ) dζ =
γ
0
n→∞
0
Nach Satz 11.8.12 ist daher f holomorph.
❑
11.8. HOLOMORPHE FUNKTIONEN
129
P
11.8.14 Korollar. Seien an ∈ Y, n ∈ N ∪ {0} derart, dass die Potenzreihe ∞
zn an
Pn=0
∞
10
einen Konvergenzradius R > 0 hat . Ist w ∈ C, so ist die Grenzfunktion f (z) = n=0 (z−
w)n an auf UR (w) holomorph. Dabei ist UR (w) die offene Kugel bzgl. |.|, dh. UR (w) =
{z ∈ C : |z − w| < R}.
Beweis. Für ein kompaktes K ⊆ UR (w) existiert r = maxz∈K |z − w| (< R), da z 7→ |z − w|
stetig auf der kompakten Menge K ist. Also gilt K ⊆ Kr (w) ⊆ UR (w).
Nach Satz 6.7.7 (siehe auch Fakta 9.3.8, 4) konvergiert die Funktionenfolge
PN
z 7→ n=0
(z − w)n an für N → ∞ gleichmäßig auf Kr (w) gegen f (z); somit auch auf
PN
K. Da gemäß Beispiel 11.8.6 alle Polynome n=0
(z − w)n an holomorph sind, ist nach
Lemma 11.8.13 auch f auf UR (w) holomorph.
❑
11.8.15 Satz. Sei D ⊆ C offen. Eine Funktion f : D → Y ist genau dann holomorph,
wenn f analytisch ist, dh. wenn es zu jedem w ∈ D eine offene Kreisscheibe Uρw (w) ⊆ D
P
n
bzgl. |.| gibt, sodass sich f darauf als Grenzfunktion einer Potenzreihe ∞
n=0 (z − w) an
mit Konvergenzradius ≥ ρw darstellen lässt; vgl. Bemerkung 6.7.11.
Dabei sind die Koeffizienten an ∈ Y eindeutig durch f auf folgende Weise bestimmt:
a0 = f (w), und an :=
f (n) (w)
, n ∈ N.
n!
Das größtmögliche ρw , sodass sich ein holomorphes f als Potenzreihe auf Uρw (w) darstellen lässt, ist ρw = sup{r > 0 : Ur (w) ⊆ D}, wobei ρw = +∞, wenn D = C.
Beweis. Lässt sich f um jedes w auf einem Uρw (w) ⊆ D lokal als Grenzfunktion einer
Potenzreihe darstellen, so ist f dort gemäß Korollar 11.8.14 holomorph. Da Holomorphie eine lokale Eigenschaft ist, muss f auf ganz D holomorph sein.
Sei nun f : D → Y holomorph, und setze ρw = sup{r > 0 : Ur (w) ⊆ D}. Offensichtlich ist das das größte ρw mit Uρw (w) ⊆ D. Für ρ ∈ (0, ρw ), ζ ∈ C mit |ζ − w| = ρ
und für z ∈ Uρ (w) gilt
!n
∞
X
1
1
1
1
z−w
=
·
·
.
z−w =
ζ − w n=0 ζ − w
ζ − w 1 − ζ−w
ζ−z
Aus (11.32) folgt (γρ (t) = w + ρ exp(it), t ∈ [0, 2π])
1
f (z) =
2πi
!n
Z X
∞
f (ζ)
z−w
·
dζ =
ζ
−
w
ζ
−w
γρ n=0
!n
Z 2π X
∞
z−w
1
· f (w + ρ exp(it)) dt .
2π 0 n=0 ρ exp(it)
Wegen
∞ X
sup
t∈[0,2π] n=0
10 Vgl.
z−w
ρ exp(it)
!n
!n
∞
X |z − w|
· f (w + ρ exp(it)) ≤
· k f k∞,Kρ (w) < +∞
ρ
n=0
(6.7), Satz 6.7.7 sowie Fakta 9.3.8.
KAPITEL 11. WEGINTEGRALE
130
konvergiert die Reihe im obigen Riemann Integral absolut und daher gleichmäßig; vgl.
Korollar 6.7.4. Aus Satz 8.7.2 (siehe auch (9.17)) folgt daher11
!n
Z 2π
∞
X
1
z−w
f (z) =
· f (w + ρ exp(it)) dt =
2π 0
ρ exp(it)
n=0
Z
∞
X
1
f (ζ)
n
dζ .
(z − w) ·
n+1
2πi γρ (ζ − w)
n=0
|
{z
}
=:an
P∞
Die letzte Gleichheit folgt aus (11.23). Also konvergiert n=0 (z − w)n an und stimmt mit
(n)
f (z) überein, wobei wegen (11.31) bzw. (11.33) a0 = f (w) und an := f n!(w) , n ∈ N.
Aus (6.7) folgt schließlich, dass diese Potenzreihe einen Konvergenzradius
R ≥ |z − w| hat, und da z ∈ Uρ (w) beliebig war, gilt R ≥ ρ. Da auch ρ ∈ (0, ρw ) beliebig
war, folgt R ≥ ρw .
❑
11.8.16 Bemerkung (*). Wir haben gezeigt, dass jedes holomorphe f : D → Y unendlich oft differenzierbar ist. Somit existieren neben allen höheren partiellen Ableitungen
auch alle Ausdrücke der Form (10.8), dh. auch die alle Ausdrücke dk f (z)(v1 , . . . , vk )
aus Definition 10.2.6 für alle k ∈ N, alle z ∈ D und alle Richtungsvektoren v1 , . . . , vk ∈
R2 C. Gemäß (11.26) gilt für k = 1
∂f
(z) = d1 f (z)v1 = v1 · f ′ (z) .
∂v1
Ersetzen wir f durch die holomorphe Funktion z 7→ v1 · f ′ (z) und v1 durch v2 , so folgt
∂ ∂
f (z) = d2 f (z)(v1 , v2 ) = v2 · v1 · f ′ (z) .
∂v2 ∂v1
Fährt man so fort, so erhält man allgemein dk f (z)(v1 , . . . , vk ) = vk · . . . · v1 · f (k) (z).
Insbesondere stimmt die Reihe aus Proposition 10.2.12, (ii), für y = w ∈ D mit der
Potenzreihe aus Satz 11.8.15 überein.
11.9 Nochmals komplexe Differenzierbarkeit*
Wir werden in diesem Abschnitt zeigen, dass f : D → Y genau dann holomorph ist,
wenn f bei allen z ∈ D komplex differenzierbar ist. Man kann also bei der Definition
der Holomorphie in Definition 11.8.3 auf die Stetigkeit von f ′ verzichten.
11.9.1 Lemma. Sei R ⊆ C ein offenes Rechteck. Sei f : R → Y bei jedem z ∈ R
differenzierbar, und es gelte ∂yf (z) = i ∂xf (z) für alle z ∈ R. Eine gemäß Lemma 11.8.2
äquivalente Forderung ist, dass f bei allen z ∈ R komplex differenzierbar ist.
Ist weiters das Rechteck [α1 , β1 ] × [α2 , β2 ] in R enthalten, so gilt
Z
Z
f (z) dz ,
(11.35)
f (z) dz =
γ1
wobei γ1 =
γ2
−
−−→ −−−
−−→
−
−−→ −−−
−−→
−−
−−
α1 β1
α1 β1
β1 β1
α1 α1
,
,
und
γ
=
2
α2 β2
α2 β2
β2 β2 .
α2 α2
11 Insbesondere
konvergiert diese Reihe!
11.9. NOCHMALS KOMPLEXE DIFFERENZIERBARKEIT*
131
Beweis. Aus der Differenzierbarkeit von f folgt seine Stetigkeit bei allen z ∈ R; vgl.
Korollar 10.1.14. Somit existieren die obigen komplexen Wegintegrale. Außerdem ist
(11.35) dazu äquivalent, dass
Z
f (z) dz
I(Q) :=
∂Q
verschwindet, wobei Q = [α1 , β1 ] × [α2 , β2 ] und ∂Q der geschlossene Polygonzug
−−−−!−−−→! −−−−!−−−→! −−−−!−−−→! −−−−!−−−→!
α1 β1 β1 β1 β1 α1 α1 α1
,
,
,
α2 α2 α2 β2 β2 β2 β2 α2
ist. Unterteilen wir Q in die vier gleich großen Rechtecke
!
1!
k · β1 −α
1
α1
2
1
, k, l = 0, 1 ,
Qkl := ([0, β1 − α1 ] × [0, β2 − α2 ]) +
+
2
2
α2
l · β2 −α
2
so folgt
I(Q) =
Z
f (z) dz =
∂Q
1 Z
X
k,l=0
|
f (z) dz ,
∂Q1k,l
{z
:=I(Q1k,l )
}
da sich die Wegintegrale über die inneren Polygonzüge wegheben und die über die
äußeren Polygonzüge aufaddieren.
Wäre nun I(Q) , 0, so hätten wir auch I(Q1k,l ) , 0 für zumindest ein Paar k, l ∈
{0, 1}. Seien nun k1 , l1 ∈ {0, 1}, sodass kI(Q1k1 ,l1 )k ≥ kI(Q1k,l )k für alle k, l ∈ {0, 1}.
Offenbar gilt dann
1
X
kI(Q)k ≤
kI(Q1k,l )k ≤ 4kI(Q1k1 ,l1 )k .
k,l=0
Nun unterteilen wir jedes der Rechtecke Q1k,l in vier gleich großen Rechtecke und erhalten insgesamt die 16 Rechtecke Q2k,l , k, l = 0, . . . , 3. Unter den in Q1k1 ,l1 enthaltenen
Rechtecken aus {Q2k,l : k, l = 0, . . . , 3} wählen wir eines – Q2k2 ,l2 , k2 , l2 ∈ {0, . . . , 3} –
aus, sodass kI(Q2k2 ,l2 )k maximal ist, womit kI(Q1k1 ,l1 )k ≤ 4kI(Q2k2 ,l2 )k.
Setzen wir diese Prozedur fort, so haben wir im n-ten Schritt Q in 4n Rechtecke
!
1!
k · β12−α
n
α1
1
, k, l = 0, . . . , 2n − 1 ,
+
Qnk,l := n ([0, β1 − α1 ] × [0, β2 − α2 ]) +
2
2
α2
l · β22−α
n
P2n −1
n
unterteilt, auf dass k,l=0 I(Qk,l ) = I(Q). Zudem seien kn , ln ∈ {0, . . . , 2n − 1} so,
n
n
n
n−1
dass Qnkn ,ln ⊆ Qn−1
kn−1 ,ln−1 und kI(Qkn ,ln )k = max{kI(Qk,l )k : Qk,l ⊆ Qkn−1 ,ln−1 }, womit
n−1
n
kI(Qkn−1 ,ln−1 )k ≤ 4kI(Qkn ,ln )k.
Da die Rechtecke Qnkn ,ln , n ∈ N ineinander geschachtelt sind, erfüllt diese MengenT
folge die endliche Durchschnittseigenschaft. Somit ist n∈N Qnkn ,ln nichtleer. Da aber
die Durchmesser d(Qnkn ,ln ) von Qnkn ,ln für n → ∞ gegen Null konvergieren, ist dieser
T
Durchschnitt einpunktig, dh. n∈N Qnkn ,ln = {w}.
Die noch nicht verwendete Tatsache, dass f insbesondere bei w komplex differenzierbar ist, besagt, dass f (z) = f (w) + (z − w) f ′ (w) + |z − w|ε(z) mit limz→w ε(z) = 0.
Aus der Linearität von Wegintegralen folgt
Z
Z
|z − w|ε(z) dz .
f (w) + (z − w) f ′ (w) dz +
I(Qnkn ,ln ) =
∂Qnkn ,ln
∂Qnkn ,ln
KAPITEL 11. WEGINTEGRALE
132
Da z 7→ f (w) + (z − w) f ′ (w) holomorph ist, folgt aus (11.24) und Korollar 11.8.7
Z
n
|z − w|ε(z) dzk ≤ ℓ(∂Qnkn ,ln ) d(Qnkn ,ln ) sup kε(z)k .
kI(Qkn ,ln )k = k
z∈Qnkn ,ln
∂Qnkn ,ln
Wegen ℓ(∂Qnkn ,ln ) =
1
2n ℓ(∂Q)
und d(Qnkn ,ln ) =
1
2n d(Q)
kI(Q)k ≤ 41 kI(Q1k1 ,l1 )k ≤ · · · ≤ 4n kI(Qnkn ,ln )k ≤ 4n
folgt
1
n→∞
ℓ(∂Q)d(Q) sup kε(z)k −→ 0 .
4n
z∈Qnkn ,ln
Also gilt I(Q) = 0 im Gegensatz zu unserer Annahme I(Q) , 0.
❑
11.9.2 Satz. Sei Y ein Banachraum über C, D ⊆ C offen. Eine Funktion f : D → Y ist
genau dann holomorph, wenn f bei allen z ∈ D komplex differenzierbar ist.
Beweis. Definitionsgemäß ist jede holomorphe Funktion komplex differenzierbar; vgl.
Definition 11.8.3. Sei nun f : D → Y überall komplex differenzierbar, w ∈ D und δ > 0
so klein, dass das Quadrat D(w) := Uδk.k∞ (w) ganz in D enthalten ist. Wir können also
Lemma 11.9.1 auf R = D(w) anwenden.
Definieren wir φ f : D(w) → L(R2 , Y) durch φ f (z) = ( ηξ 7→ (ξ + iη) f (z)), so kann
wegen (11.22) die Gleichung (11.35) auch als
Z
Z
φ f (x) dx
φ f (x) dx =
γ1
γ2
angeschrieben. Insbesondere sind die Voraussetzungen von Lemma 11.4.6 erfüllt, womit sich φ f auf D(w) als Gradientenfeld und infolge auf D als lokales Gradientenfeld
herausstellt. Nach Satz 11.8.12 ist f holomorph auf D.
❑
11.10 Harmonische Funktionen*
Wir wollen in diesem Anschnitt den Zusammenhang von komplexwertigen, holomorphen Funktionen und sogenannten harmonischen Funktionen beleuchten.
11.10.1 Definition. Ist g : G → C mit offenem G ⊆ R2 C zweimal stetig differenzierbar, so bezeichnet ∆g : G → C (Laplace g) die Abbildung
!
!
!
∂2 g x
x
∂2 g x
∆g
:= 2
+ 2
.
y
∂x y
∂y y
Funktionen g : G → C, g ∈ C 2 (G) heißen harmonisch, falls ∆g ≡ 0.
Da die Ableitungen eintragsweise berechenbar sind, ist g offenbar genau dann harmonisch, wenn Re g und Im g es sind.
11.10.2 Proposition. Ist G ⊆ C offen und f : G → C holomorph, so ist f auch
harmonisch. Insbesondere sind dann Real- und Imaginärteil von f harmonisch.
Ist umgekehrt u : G → R harmonisch für ein einfach zusammenhängendes Gebiet
G ⊆ C, so gibt es ein bis auf eine imaginäre Konstante eindeutiges holomorphes f :
G → C, sodass u ≡ Re f .
11.10. HARMONISCHE FUNKTIONEN*
133
Beweis. Ist f : G → C analytisch, so gelten die Cauchy-Riemannschen Differentialgleichungen Cauchy-Riemannschen Differentialgleichungen (z = x + iy)
∂v
∂v
∂u
∂u
(z) = (z),
(z) = − (z) ,
∂x
∂y
∂x
∂y
(11.36)
wobei u = Re f und v = Im f . Offensichtlich kann man (11.36) auch schreiben als
∂f
∂f
(z) = −i ·
(z) .
∂x
∂y
(11.37)
Da holomorphe Funktionen beliebig oft differenzierbar sind, folgt aus dieser Gleichung
abgeleitet nach x
∂2 f
∂2 f
(z) .
(z)
=
−i
·
∂x∂y
∂x2
Wegen dem Satz von Schwarz und wegen (11.37) abgeleitet nach y ist dieser Ausdruck
gleich
∂2 f
∂2 f
(z) = (−i)2 · 2 (z) .
−i ·
∂y∂x
∂y
Daraus folgt sofort ∆ f = 0, womit offensichtlich auch u = Re f und v = Im f harmonisch sind.
Ist umgekehrt u : G → R harmonisch und G ⊆ C einfach zusammenhängendes
∂u
(z), β(z) := − ∂u
Gebiet, so setzen wir α(z) := ∂x
∂y (z) und F := α + iβ. Dann sind α :
1
G → R, β : G → R und F : G → C alle drei C -Funktionen, wobei wegen ∆u = 0 und
wegen dem Satz von Schwarz
∂2 u
∂F
∂α
∂β
∂2 u
(z) =
(z) + i (z) = 2 (z) − i
(z) =
∂x
∂x
∂x
∂x∂y
∂x
−
∂β
∂α
∂F
∂2 u
∂2 u
(z) =
(z) − i (z) = −i ·
(z) .
(z) − i
2
∂y∂x
∂y
∂y
∂y
∂y
Also ist F holomorph. Da G einfach zusammenhängend ist, gibt es eine Holomorphe
Stammfunktion f , dh. f : G → C mit f ′ = F; vgl. Korollar 11.8.7. Wegen f ′ = ∂∂xf =
−i ∂∂yf gilt
∂ Im f
∂ Re f
∂u
=
= Re F = α =
∂y
∂x
∂x
und
−
∂ Re f
∂ Im f
∂u
=
= Im F = β = − .
∂y
∂x
∂y
Insbesondere ist d(Re f )(z) = du(z) (∈ L(R2 , R)) für alle z ∈ G. Wegen Satz 11.4.1 und
da in G je zwei Punkte durch einen Polygonzug verbindbar sind, folgt daraus Re f =
u + c für ein c ∈ R. Nun ist f − c die gesuchte holomorphe Funktion.
Falls g : G → C eine weitere holomorphe Funktion mit Re g = u ist, so ist
f − c − g : G → C auch holomorph mit einem verschwindenden Realteil. Aus den
Cauchy-Riemannschen Differentialgleichungen folgt d( f − c − g)(z) = 0 und daraus,
dass f − c − g eine Konstante sein muss; vgl. Satz 11.4.1.
❑
KAPITEL 11. WEGINTEGRALE
134
11.11 Übungsbeispiele
11.1 Man berechne die Länge der Wege γ : [0, 1] → R2 :
3
γ(t) = (t, t 2 )T , γ(t) = (t, cosh(t))T ,
und gebe die zu den γ’s äquivalente Wege γ′ an, wobei der Parameter von γ die Bogenlänge
ist.
11.2 Man zeige, dass γ : [0, 1] → R2 mit γ(0) = 0 und γ(t) = (t, t2 cos tπ2 )T , t > 0 zwar stetig,
aber nicht rektifizierbar ist.
1
Hinweis: Berechne L(Z) für Z = {0, √1n , √n−1
, . . . , √12 , 1}.
11.3 Sei γ1 : [0, 1] → Rn , γ2 : [1, 2] → Rn und γ3 : [0, 2] → Rn mit γ3 (t) = γ1 (t), t ∈ [0, 1) und
γ3 (t) = γ2 (t), t ∈ [1, 2]. Es gilt nicht notwendigerweise γ1 (1) = γ2 (1)! Weiters sei γ1 bei
1 stetig, und seien γ1 und γ2 rektifizierbar. Man zeige, dass dann auch γ3 rektifizierbar ist
mit ℓ(γ3 ) = ℓ(γ1 ) + ℓ(γ2 ) + kγ2 (1) − γ1 (1)k2 !
Hinweis: Man zeige zunächst, dass limZ∈Z,1∈Z kγ2 (1) − γ1 (ξ j(Z) )k2 = kγ2 (1) − γ1 (1)k2 und
dass limZ∈Z,1∈Z kγ1 (1) − γ1 (ξ j(Z) )k2 = 0, wobei Z die Menge aller Zerlegungen von [0, 2]
ist, und ξ j(Z) das größte Element von Z ist, dass kleiner 1 ist.
11.4 Man betrachte f : [a, b] → R. Ist f rektifizierbar, so sagt man in diesem Fall (Rn = R),
dass die Funktion f von beschränkter Variation ist, und setzt V xy ( f ) := ℓ( f |[x,y] ), wenn
a ≤ x ≤ y ≤ b.
Man zeige:
(i) Sind f, g von beschränkter Variation und λ ∈ R, so auch f + g und λ f , wobei V xy ( f +
g) ≤ V xy ( f ) + V xy (g) und V xy (λ f ) = |λ|V xy ( f ).
(ii) Ist f monoton steigen, so gilt V xy ( f ) = f (y) − f (x).
(iii) Ist f Differenz zweier monoton steigender Funktionen, so ist f von beschränkter
Variation.
(iv) Ist f : [a, b] → R von beschränkter Variation, so ist f die Differenz g − h zweier
monoton steigender Funktionen.
Hinweis: Setze g(t) = Vat ( f ) und zeige von h, dass es dann monoton wächst!
11.5 Man gebe eine Formel für die Länge des Weges γ : [0, π2 ] → R2 an, der durch γ(t) =
( f (t) cos t, f (t) sin t)T definiert ist, wobei f ∈ C 1 .
Man berechne die Bogenlänge speziell für die Archimedische Spirale, dh. f (t) = t!
11.6 Man betrachte den Weg im R3 mit folgender Parameterdarstellung (Schraubenlinie):
r cos t
γ(t) = r sin t , t ∈ [0, 4π]
ht
Hierbei seien r, h > 0 fest gewählt. Zeichnen Sie eine Skizze! Weiters berechne man die
Bogenlänge, und parametrisiere γ(t) nach der Bogenlänge um. Daher schreibe γ(t) als
γ(t(s)), sodass die Bogenlänge der Kurve von γ(0) bis γ(t(s)) genau s ist.
R
11.7 Man berechne das Wegintegral γ ((x2 + 5y + 3yz)dx + (5x + 3xz − 2)dy + (3xy − 4z)dz),
wobei γ : [0, 2π] → R3 , γ(t) = (sin(t), cos(t), t)T .
R
Schreibweise: Wegintegrale γ φ(x) dx von Vektorfeldern φ : D → L(R3 , R), dh.
φ((ξ, η, ζ)T ) = (P(ξ, η, ζ), Q(ξ, η, ζ), R(ξ, η, ζ)) werden auch oft als
Z
P(ξ, η, ζ) dξ + Q(ξ, η, ζ) dη + R(ξ, η, ζ) dζ .
γ
angeschrieben. Entsprechendes gilt für Vektorfeldern φ : D → L(R2 , R).
11.11. ÜBUNGSBEISPIELE
135
R
√
φ(x) dx, wobei γ : [0, 1] → R2 , γ(t) = ( t, t)T und
!
ex ey
φ : R2 → L(R2 , R2 ) R2×2 , φ((x, y)T ) =
.
x y
R
11.9 Man berechne das Wegintegral γ φ(x) dx, wobei γ : [0, 2π] → R3 , γ(t) = (sin(t), cos(t), t)T
und φ : R3 → L(R3 , R) R1×3 , φ((x, y, z)T ) = (x2 + 5y + 3yz, 5x + 3xz − 2, 3xy − 4z).
11.8 Man berechne das Wegintegral
γ
2
3 T
11.10 Man betrachte den stetigen Weg γ : [0, 1] → R2 , γ(t)
R = (1 + t , 1 + t ) . Man bestimme
die Weglänge von γ und berechne das Wegintegral γ φ(x)dx, wobei φ : R2 → L(R2 , R) √
R1×2 , φ((x, y)T ) = (sin( x − 1), xy).
11.11 Seien f, g : [a, b] → R (vgl. Definition 11.2.2 mit X = R, n = 1 und somit L(Rn , X) = R)
beschränkt.
m+1
Weiters seien R1 = ((ξ j )mj=0 ; (α j )mj=1 ) und R2 = ((η j )m+1
j=0 ; (β j ) j=1 ) mit η j = α j , j = 1, . . . , m
und β1 = a, βm+1 = b, β j = ξ j−1 , j = 2, . . . , m.
Man zeige: P( f, g; R1 ) = f (b)g(b) − f (a)g(a) − P(g, f ; R2 ), wobei
P( f, g; R1 ) =
m
X
f (α j )(g(ξ j ) − g(ξ j−1 )),
P(g, f ; R2 ) =
m+1
X
g(β j )( f (η j ) − f (η j−1 )),
j=1
j=1
Rb
Rb
und leite daraus her, dass a f dg genau dann existiert, wenn a gd f existiert, und in diesem
Fall gilt:
Z b
Z b
f dg = f (b)g(b) − f (a)g(a) −
gd f.
a
a
Hinweis: Man leite aus Lemma 3.10.5 zunächst folgendes her:
m
X
n=1
an (bn − bn−1 ) = am bm − a1 b0 −
m−1
X
n=1
(an+1 − an )bn .
11.12 Sei γ : [a, b] → Rn rektifizierbar und man denke sich den Weg γ mit Masse belegt, sodass
an der Stelle t ∈ [a, b] die Dichte (Masse pro Längeneinheit) ρ(t) ist.
Die Gesamtmasse des Weges berechnet sich durch das Riemann-Stieltjes Integral
Z b
M=
ρdℓ,
a
wobei ℓ(x) = ℓ(γ|[ a, x]) (Weglänge des auf [a, x] eingeschränkten Weges), und der Schwerpunkt durch
Z b
1
f dℓ,
M a
wobei f : [a, b] → L(R, R2 ) R2×1 , f (t) = ρ(t)γ(t).
Man berechne für den Weg γ : [0, 1] → R2 , γ(t) = (t, t2 )T , der mit konstanten Dichte ρ = 1
die Gesamtmasse und den Schwerpunkt.
11.13 Ist das Vektorfeld R3 → L(R3 , R) R1×3 , φ((ξ, η, ζ)T ) = (ξ + ζ, ξ + η + ζ, ξ + ζ) ein
Gradientenfeld? Falls ja, berechne man die Stammfunktion, also ein f , sodass d f = φ!
, x ).
11.14 Man betrachte D = R2 \{0} und φ : D → L(R2 , R) definiert durch φ((x, y)T ) = ( x2−y
+y2 x2 +y2
Man berechne zunächst das Wegintegral dieser Funktion über den in positiver Richtung
durchlaufenen Einheitskreis (γ(t) = (cos t, sin t)T , 0 ≤ t ≤ 2π)!
Nun zeige man, dass auf D die Bedingung (11.8) aus dem Skriptum erfüllt ist und zeige,
dass es auf der rechten offenen Halbebene R2 \ {(x, y)T : x ≤ 0} eine reellwertige Funktion
f ∈ C 1 gibt, sodass dort d f = φ.
Kann es so eine Funktion f auf ganz D geben?
KAPITEL 11. WEGINTEGRALE
136
11.15 Im einfach zusammenhängenden Gebiet G = {(ξ, η, ζ)T ∈ R3 : η > 0, ζ > 0} sei K : G →
L(R3 , R) R1×3 durch
!
ξ ξ
K(ξ, η, ζ) = ln(ζη), , β ,
η ζ
mit einem festen β ∈ R definiert. Für welchen Wert von β ist K ein Gradientenfeld?
T
Für die geradlinige
R Verbindung γ von (0, 1, 1) nach (ξ0 , η0 , ζ0 ) in G berechne man man
das Wegintegral γ K(x) dx in den Fällen β = 1 und β = 2.
√ t
11.16 Zeigen Sie, dass der Weg γ(t) := 2 cos
, t ∈ [ π4 , 2π + π4 ] in R2 \ { 00 } homotop ist zum
sin t
Polygonzug −
x−0−→
x1 , −
x−1−→
x2 , −
x−2−→
x3 , −
x−3−→
x0 , wobei x0 = (1, 1)T , x1 = (−1, 1)T , x2 = (−1, −1)T , x3 =
T
(1, −1) .
11.17 Sei k ∈ Z und γ : [0, 2π] → C definiert durch γ(t) = a + r exp(it) mit festen, aber beliebigen
r > 0 und a ∈ C. Berechnen Sie das folgende komplexe Wegintegral direkt, dh. ohne
Zuhilfenahme der Cauchyschen Integralformel bzw. ihres Korollars:
Z
(z − a)k dz .
γ
11.18 RMan berechne wieder ohne Cauchyscher Integralformel das komplexe Wegintegral
1
dz, wobei γ(t) = exp(it), t ∈ [0, 2π], und |w| , 1.
γ z−w
P
1
zn
1
1 P∞ wn
Hinweis: Ist |w| > 1, so gilt z−w
= − w1 ∞
n=0 wn , und ist |w| < 1, so gilt z−w = z
n=0 zn .
Begründen Sie allfällige Vertauschungen von Limes und Integral!
11.19 Ist f : D → C im Punkt z ∈ D komplex differenzierbar, so zeige man, dass det d f (z) =
| f ′ (z)|2 .
11.20 Sei h : C \ [−∞, 0] → C definiert durchph(z) = ln |z| + i arg(z), wobei das Argument arg(ξ +
iη) ∈ (−π, π) so definiert ist, dass f ( ξ 2 + η2 , arg(ξ + iη))T = (ξ, η)T , wobei f (r, φ)T =
(r cos φ, r sin φ)T . Zeigen Sie, dass h holomorph ist, und berechnen Sie die h′ (z)!
Anmerkung: h wird als komplexer Logarithmus bezeichnet. In der Tat erfüllt h die Beziehung exp(h(z)) = z, z ∈ C \ [−∞, 0], und h(exp(z)) = z für z ∈ R × (−π, π).
11.21 Sei D ⊆ C ein Gebiet und f : D → C holomorph. Zeigen Sie, dass f konstant ist, wenn f
nur Werte aus R (⊆ C) oder nur Werte aus iR (⊆ C) annimmt.
Hinweis: Was gilt für d f (z)?
11.22 Für w ∈ C und einen geschlossenen, stetigen und stückweise stetig differenzierbaren Weg
γ : [a, b] → C mit w < γ([a, b]) ist die Umlaufzahl von γ um w definiert durch
Z
1
1
n(γ, w) :=
dz .
2iπ γ z − w
Zeigen Sie, dass n(γ, w) ∈ Z. Geschlossener Weg bedeutet γ(a) = γ(b).
R t γ′ (s)
Hinweis: Setzen Sie g(t) := a γ(s)−w
ds und leiten dann e−g(t) (γ(t) − w) nach t ab. Was
−g(b)
bedeutet das Ergebnis, wenn Sie e
und e−g(a) vergleichen?
11.23 Sei γ : [a, b] → C stetig und stückweise stetig differenzierbar aber nicht notwendigerweise
geschlossen. Zeigen Sie, dass dann die Abbildung
Z
1
1
w 7→
dz
2iπ γ z − w
von C \ γ([a, b]) nach C stetig ist.
11.24 Mit der Notation aus dem vorletzten Beispiel sei γ ein fester geschlossener, stetiger und
stetig differenzierbarer Weg . Weiters sei G ⊆ C ein Gebiet, sodass γ([a, b]) ∩ G = ∅.
Zeigen Sie, dass n(γ, w) für alle w ∈ G den selben Wert ergibt.
Zeigen Sie auch, dass dieser Wert Null ist, falls G nicht beschränkt ist.
11.11. ÜBUNGSBEISPIELE
137
11.25 Nun sei H ⊆ C ein einfach zusammenhängendes Gebiet und w ∈ C \ H. Zeigen Sie, dass
für jeden geschlossenen, stetigen und stetig differenzierbaren Weg γ : [a, b] → H (also
jeden Weg der in H verläuft) immer n(γ, w) = 0 gilt.
11.26 Überprüfen Sie die Kettenregel für holomorphe Funktionen auf 2 verschiedene Arten. Einmal ähnlich wie die eindimensionale Kettenregel aus dem Kapitel 7, und ein zweites mal
mit Hilfe der mehrdimensionalen Kettenregel.
11.27 Sei D ⊆ C offen, w ∈ D mit Kr (w) ⊆ D, c ∈ R, f : D → C stetig und γ j : [0, 2π] → D
( j = 1, 2) definiert durch γ1 (t) = w + r exp(it) bzw. γ2 (t) = w + r exp(i(t + c)). Skizzieren
Sie die Situation und zeigen Sie, dass
Z
Z
f (z) dz .
f (z) dz =
γ2
γ1
11.28 Weisen Sie die Holomorphie der Funktionen exp : C → C, cos : C → C und sin : C → C
nach, indem sie die Cauchy-Riemannschen Differentialgleichungen und die stetige Differenzierbarkeit zeigen! Weiters gebe man in dem Fall jeweils eine Stammfunktion dieser
Funktionen f an (also das F mit F ′ = f )! Schließlich gebe man auch eine Stammfunktion
von z2 (cos z)2 an!
11.29 Sei D ⊆ C offen und f : D → C holomorph. Man zeige, dass ∆ Re f = ∆ Im f = 0 und
dass ∆(| f |2 ) ≥ 0; vgl. Übungsbeispiel 10.15.
11.30 Verwenden Sie das vorherige Beispiel und Übungsbeispiel 10.15, um zu zeigen, dass wenn
G ⊆ C offen und f : G → C holomorph ist, dann für jedes w ∈ G und ρ > 0 mit Kρ (w) ⊆ G
für alle ζ ∈ Uρ (w)
| f (ζ)| ≤
max | f (z)|,
z∈Kρ (w)\Uρ (w)
min
Re f (z) ≤ Re f (ζ) ≤
z∈Kρ (w)\Uρ (w)
min
Im f (z) ≤ Im f (ζ) ≤
z∈Kρ (w)\Uρ (w)
z∈Kρ (w)\Uρ (w)
z∈Kρ (w)\Uρ (w)
max
Re f (z)
max
Im f (z)
gilt.
11.31 Sei G ⊆ C ein Gebiet und seien f, g : G → C zwei holomorphe Funktionen. Man zeige,
dass f ≡ g, falls f (zn ) = g(zn ) für eine Folge (zn ) aus G mit Häufungspunkt z in G, wobei
zn , z für unendlich viele n ∈ N.
Hinweis: Zeigen Sie, dass A = {z ∈ G : ∃ǫ > 0, f |Uǫ (z) ≡ g|Uǫ (z) } offen und nicht-leer ist;
werfen Sie dafür einen Blick auf Korollar 6.7.9. Zeigen Sie auch, dass c(A) ∩ G = A. Nun
betrachte man B := G \ c(A)....
11.32 Man leite die Potenzreihenentwicklung von z2 (cos z)2 um den Punkt 0 her! Wie groß ist
der Konvergenzradius dieser Potenzreihe?
11.33 Sei D ⊆ C offen und f : D → C holomorph. Zeigen Sie, dass dann auch f ∗ : D̄ → C
holomorph ist, wobei D̄ = {z̄ : z ∈ D} und f ∗ (z) = f (z̄).
11.34 Zeigen Sie, dass die Funktion f (x) aus 6.28 auch für x ∈ C \ Z eine wohldefinierte komplexwertige Funktion ist. Zeigen Sie, dass diese Funktion auch holomorph ist.
11.35 Zeigen Sie, dass die Funktion f (z) aus dem vorherigen Beispiel für alle z ∈ C \ Z mit
2
z 7→ sinπ2 (πz) übereinstimmt.
1
1
+ z−1
11.36 Berechnen Sie für die Funktion f (z) = z+1
Z
Z
Z
f (z) dz +
f (z) dz und
γ1
γ2
f (z) dz ,
γ3
wobei γ j : [0, 2π] → C ( j = 1, 2, 3) mit γ j (t) = (−1) j +
γ3 (t) = 4 exp(it).
1
2
exp(it) für j = 1, 2 und
138
KAPITEL 11. WEGINTEGRALE
Kapitel 12
Topologische Grundlagen
12.1 Topologische Grundbegriffe
Wir wollen in diesem und in den nächsten Abschnitten die Konvergenztheorie, wie wir
sie für metrische Räume entwickelt haben, verallgemeinern. Dabei werden wir Räume
betrachten, die gerade noch soviel Struktur tragen, dass wir von stetigen Funktionen,
Grenzwerten, Kompaktheit etc. sprechen können, nämlich die sogenannten topologischen Räume.
12.1.1 Beispiel (Metrische Räume). Sei (Y, d) ein metrischer Raum. Es gilt also
d(x, y) ≥ 0 und d(x, y) = 0 genau dann, wenn x = y.
d(x, y) = d(y, x).
d(x, y) ≤ d(x, z) + d(z, y).
Sei O die Menge aller offenen Teilmengen von Y gemäß Definition 5.1.4. Dabei haben
wir eine Teilmenge O von Y offen genannt, wenn sie die Eigenschaft hat, dass es zu
jedem x ∈ O ein ǫ > 0 gibt, sodass die ǫ-Kugel Uǫ (x) (= {y ∈ Y : d(y, x) < ǫ}) ganz in
O enthalten ist.
Wir haben in Proposition 5.1.7 gesehen, dass O folgende Eigenschaften hat.
∅ ∈ O, X ∈ O.
Für O1 , O2 ∈ O gilt auch O1 ∩ O2 ∈ O.
Ist I eine Indexmenge und Oi ∈ O, i ∈ I, so folgt
S
i∈I
Oi ∈ O.
Wir nehmen nun diese aufgezählten Eigenschaften als Ausgangspunkt unserer angestrebten Verallgemeinerung.
12.1.2 Definition. Sei X eine nichtleere Menge und T ⊆ P(X) ein System von Teilmengen von X. Erfüllt T die Eigenschaften
(01) ∅ ∈ T , X ∈ T .
(02) Für O1 , O2 ∈ T gilt auch O1 ∩ O2 ∈ T .
(03) Ist I eine Indexmenge und Oi ∈ T , i ∈ I, so folgt
139
S
i∈I
Oi ∈ T .
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
140
so heißt T eine Topologie auf X. Die Elemente von T heißen offene Mengen, und man
spricht von (X, T ) als topologischem Raum.
12.1.3 Bemerkung. Mittels Vollständiger Induktion sieht man sofort, dass (O2) äquivalent ist zu
T
(02’) Ist n ∈ N und O1 , . . . , On ∈ T , so folgt ni=1 Oi ∈ T .
12.1.4 Beispiel.
Wir haben oben gesehen, dass die Menge O aller offenen Mengen eines metrischen Raumes (Y, d) (01)-(03) erfüllt. Damit ist (Y, O) ein topologischer Raum.
Man sagt, O ist die von der Metrik d induzierte Topologie und schreiben auch
T (d) für O.
Ist Y = R p versehen mit der Metrik d2 , so heißt die von d2 induzierte Topologie
T (d2 ) Euklidische Topologie. Die Metriken d1 und d∞ induzieren ebenfalls die
Euklidische Topologie.
Sei T := P(X). Klarerweise sind (01)-(03) erfüllt, also ist (X, P(X)) ein topologischer Raum. Man spricht von der diskreten Topologie. Die diskrete Topologie
wird übrigens von der diskreten Metrik induziert (siehe Beispiel 3.1.5).
Sei T := {∅, X}. Wieder sind (01)-(03) trivialerweise erfüllt. Man spricht von der
Klumpentopologie.
Eines unserer Ziele wird es sein, Konvergenz gegen einen Punkt oder Stetigkeit bei
einem Punkt für unsere Räume zu verallgemeinern. Dazu benötigen wir ein Analogon
zum Begriff der ’ǫ-Kugel’.
12.1.5 Definition. Sei (X, T ) ein topologischer Raum und x ∈ X. Eine Menge U ⊆
X heißt Umgebung von x, wenn es eine offene Menge O ∈ T gibt mit x ∈ O ⊆
U. Wir bezeichnen mit U(x) die Menge aller Umgebungen von x, den sogenannten
Umgebungsfilter von x.
Der Begriff Filter ist ein allgemeines mengentheoretisches Konzept.
12.1.6 Definition. Sei M eine nichtleere Menge. Dann heißt ein Mengensystem F ⊆
P(M) ein Filter, wenn
(F1) F , ∅ und ∅ < F,
(F2) F1 , F2 ∈ F ⇒ F1 ∩ F2 ∈ F,
(F3) F1 ∈ F, F1 ⊆ F2 ⊆ M ⇒ F2 ∈ F.
Ist (X, T ) ein topologischer Raum, so ist der Umgebungsfilter U(x) tatsächlich ein
Filter, da
offensichtlich X ∈ U(x) und jede Menge U ∈ U(x) den Punkt x enthält und damit
nicht leer ist,
aus U1 , U2 ∈ U(x) die Existenz von O1 , O2 ∈ T mit x ∈ O1 ⊆ U1 und x ∈
O2 ⊆ U2 folgt, und somit x ∈ O1 ∩ O2 ⊆ U1 ∩ U2 , wobei wegen (O2) sicherlich
O1 ∩ O2 ∈ T , und daher U1 ∩ U2 ∈ U(x),
12.1. TOPOLOGISCHE GRUNDBEGRIFFE
141
aus U1 ∈ U(x) und U1 ⊆ U2 ⊆ X die Inklusion x ∈ O ⊆ U1 für ein gewisses
O ∈ T und somit x ∈ O ⊆ U2 bzw. U2 ∈ U(x) folgt.
Die korrekte Verallgemeinerung des Systems aller ǫ-Kugeln um einen festen Punkt
in einem metrischen Raum für topologische Räume ist der Begriff der Filterbasis des
Umgebungsfilters.
12.1.7 Definition. Sei M eine nichtleere Menge und F ein Filter. Dann heißt ein Mengensystem B ⊆ F eine Filterbasis von F, wenn man zu jeder Menge F ∈ F ein B ∈ B
findet, sodass B ⊆ F.
12.1.8 Bemerkung. Mit der Notation aus Definition 12.1.7 folgt, dass
F = {F ∈ P(X) : ∃B ∈ B : B ⊆ F}.
(12.1)
Also ist B Filterbasis von genau einem Filter.
Betrachtet man jetzt B losgelöst von F, so erfüllt B
(FB1) B , ∅ und ∅ < B,
(FB2) B1 , B2 ∈ B ⇒ ∃B3 ∈ B : B3 ⊆ B1 ∩ B2 .
Die erste Eigenschaft ist klar wegen (F1). Die zweite folgt aus (F2): B1 , B2 ∈ B ⇒
B1 ∩ B2 ∈ F. Aus der Definition von Filterbasis folgt ∃B3 ∈ B : B3 ⊆ B1 ∩ B2 .
Nun kann man auch mit einem Mengensystem B, das (FB1) und (FB2) erfüllt,
starten, um daraus ein Mengensystem F durch (12.1) zu definieren.
Klarerweise ist ∅ < F. Sind F1 , F2 ∈ F, so gilt B1 ⊆ F1 und B2 ⊆ F2 für gewisse
B1 , B2 ∈ B, und wegen (FB2) B3 ⊆ B1 ∩ B2 ⊆ F1 ∩F2 für ein B3 ∈ B. Also F1 ∩F2 ∈ F.
Schließlich ist mit F1 auch jedes F2 ⊇ F1 Obermenge eines gewissen B ∈ B. Somit ist
F ein Filter, der B als eine Filterbasis hat.
12.1.9 Definition. Man sagt ein topologischer Raum (X, T ) erfüllt das erste Abzählbarkeitsaxiom (ABI), wenn für jedes x ∈ X der Umgebungsfilter U(x) eine Filterbasis
bestehend aus abzählbar vielen Mengen hat.
12.1.10 Beispiel.
(i) Klarerweise ist ein Filter eine Filterbasis von sich selbst.
(ii) Ist (X, T ) ein topologischer Raum und x ∈ X, so ist z.B. {O ∈ T : x ∈ O} eine
Filterbasis von U(x).
(iii) Sei (Y, d) ein metrischer Raum und T (d) die von der Metrik erzeugte Topologie.
Ist x ∈ Y, so ist {Uǫ (x) : ǫ > 0} eine Filterbasis von U(x).
Dass Uǫ (x) eine Umgebung ist, folgt aus der Tatsache, dass Uǫ (x) sogar offen ist.
Nun sei U ∈ U(x). Dann gibt es eine offene Menge O ∈ T (d), sodass O ⊆ U. Aus
der Definition der offenen Mengen in metrischen Räumen folgt Uǫ (x) ⊆ O ⊆ U,
und damit ist obiges Mengensystem eine Filterbasis.
Auf ähnliche Weise sieht man, dass {Kǫ (x) : ǫ > 0} oder auch {Uǫn (x) : n ∈
N}, wenn (ǫn )n∈N eine Nullfolge aus positiven reellen Zahlen ist, eine Basis des
Umgebungsfilter U(x) ist. Insbesondere erfüllt jeder metrische Raum das erste
Abzählbarkeitsaxiom.
Folgendes Lemma passt nun zu der Konstruktion einer Topologie aus einer Metrik.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
142
12.1.11 Lemma. Sei (X, T ) ein topologischer Raum und sei für jeden Punkt x ∈ X
das System W(x) eine Filterbasis von U(x)1 . Dann ist eine Menge O ⊆ X genau dann
offen, d.h. O ∈ T , wenn
∀x ∈ O ⇒ O ∈ U(x) ,
(12.2)
bzw. genau dann, wenn
∀x ∈ O ∃W ∈ W(x) : W ⊆ O .
(12.3)
Beweis. Für ein festes x ∈ X bedeutet die Tatsache ∃W ∈ W(x) : W ⊆ O gemäß der
Definition einer Filterbasis nicht anderes als O ∈ U(x). Also sind (12.2) und (12.3)
äquivalent.
Ist O ∈ T und x ∈ O, so folgt daraus O ∈ U(x), vgl. Beispiel 12.1.10, (ii). Gilt
umgekehrt O ∈ U(x), ∀x ∈ O, so gibt es wegen der Definition von U(x) zu jedem
x ∈ O eine Menge O x ⊆ O, O x ∈ T , und daher
[
[
O=
{x} ⊆
Ox ⊆ O .
x∈O
x∈O
Als Vereinigung der offenen Mengen O x muss O nach (O3) selber offen sein.
❑
Nun können wir den Grenzwert eines Netzes auch für topologische Räume definieren.
12.1.12 Definition. Sei (I, ) eine gerichtete Menge und (xi )i∈I ein Netz in X, wobei
(X, T ) ein topologischer Raum ist. Man sagt, dass dieses Netz gegen einen Punkt x ∈ X
i∈I
konvergiert, in Zeichen xi −→ x, falls
∀U ∈ U(x) ∃i0 ∈ I : ∀i i0 ⇒ xi ∈ U ,
d.h. falls in jeder beliebigen Umgebung ab einem Index alle Glieder xi des Netzes
enthalten sind.
12.1.13 Fakta.
Ist W(x) eine Filterbasis von U(x), so ist die Konvergenzbedingung aus Definition
12.1.12 äquivalent zu
∀W ∈ W(x) ∃i0 ∈ I : ∀i i0 ⇒ xi ∈ W ,
da einerseits wegen W(x) ⊆ U(x) diese Bedingung sicherlich eine Konsequenz
aus der in Definition 12.1.12 ist, und da andererseits aus U ∈ U(x) die Existenz
eines W ∈ W(x) mit W ⊆ U folgt, und dann mit der gegenwärtigen Bedingung,
dass xi ∈ W ⊆ U, ∀i i0 für ein gewisses i0 ∈ I.
Ist (xi( j) ) j∈J ein Teilnetz von (xi )i∈I , d.h. i : J → I, wobei auch (J, ) eine gerichtete Menge ist, mit
∀i ∈ I∃ j0 ∈ J : ∀ j J j0 ⇒ i( j) I i ,
und konvergiert (xi )i∈I gegen x, so auch (xi( j) ) j∈J . Um das zu sehen, sei U ∈ U(x)
und i0 ∈ I, sodass i I i0 ⇒ xi ∈ U. Ist nun j0 ∈ J so, dass j J j0 ⇒ i( j) I i0 ,
so folgt auch xi( j) ∈ U für alle j J j0 .
1 Es
ist nicht ausgeschlossen, dass W(x) = U(x).
12.1. TOPOLOGISCHE GRUNDBEGRIFFE
143
12.1.14 Bemerkung. Wir sehen nun aus Fakta 12.1.13, dass diese Definition der Konvergenz mit der in metrischen Räumen konform geht. In der Tat haben wir x = limi∈I xi
in einem metrischen Raum (Y, d) genau dann, wenn
∀ǫ > 0 ∃i0 ∈ I : xi ∈ Uǫ (x) ∀i i0 .
Da {Uǫ (x) : ǫ > 0} eine Filterbasis von U(x) ist, stimmt diese Bedingung mit der aus
Fakta 12.1.13 überein.
Wir sehen insbesondere, dass die Konvergenz nicht von der konkreten Metrik, sondern nur von der von ihr erzeugten Topologie abhängt (vgl. Beispiel 12.3.10).
Wir haben in der Definition der Konvergenz absichtlich nicht die Schreibweise x =
limi∈I xi verwendet, denn es kann sein, dass x nicht der einzige Grenzwert ist.
12.1.15 Beispiel. Man betrachte eine Menge X mit mindestens zwei Elementen versehen mit der Klumpentopologie. Dann ist U(x) = {X} für alle x ∈ X. Damit konvergiert
aber jedes Netz gegen jeden Punkt x ∈ X.
Man muss eine zusätzliche Eigenschaft vom gegebenen topologischen Raum fordern, damit Grenzwerte eindeutig sind.
12.1.16 Definition. Ein topologischer Raum (X, T ) heißt T 2 -Raum (oder HausdorffRaum), wenn gilt:
(T 2 ) Zu je zwei Punkten x, y ∈ X, x , y, gibt es disjunkte offene Mengen O x und Oy ,
sodass x ∈ O x , y ∈ Oy .
Oy
y
Ox
x
Abbildung 12.1: Zweites Trennungsaxiom (T 2 )
Man sieht unmittelbar, dass diese Eigenschaft zu der Tatsache äquivalent ist, dass
es zu zwei verschiedenen Punkten x, y zwei Umgebungen U ∈ U(x), V ∈ U(y) gibt mit
U ∩ V = ∅.
12.1.17 Beispiel. Die von einer Metrik d auf einer Menge Y induzierte Topologie ist
Hausdorff. Sind nämlich x, y ∈ Y, x , y, so gilt d(x, y) > 0. Setze ǫ := 31 d(x, y) und
betrachte die Umgebungen
U := Uǫ (x), V := Uǫ (y) .
Angenommen es wäre z ∈ U ∩ V, dann erhielten wir den Widerspruch
d(x, y) ≤ d(x, z) + d(z, y) <
1
2
1
d(x, y) + d(x, y) = d(x, y) .
3
3
3
Der Beweis der Eindeutigkeit des Grenzwertes eines Netzes wird nun fast wörtlich
vom metrischen Fall übertragen.
144
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
12.1.18 Lemma. Sei (xi )i∈I ein konvergentes Netz in einem topologischen (T 2 )-Raum.
Dann ist der Grenzwert von (xi )i∈I eindeutig.
Beweis. Wären x, y zwei verschiedene Grenzwerte, so wähle man disjunkte Umgebungen U ∈ U(x) und V ∈ U(y). Dann wähle man i1 ∈ I und i2 ∈ I mit i i1 ⇒ xi ∈ U
und i i2 ⇒ xi ∈ V. Da I gerichtet ist, gibt es ein i ∈ I, i i1 , i i2 , und somit
xi ∈ U ∩ V, was aber ein Widerspruch zu U ∩ V = ∅ ist.
❑
12.2 Abgeschlossene Mengen
12.2.1 Definition. Sei (X, T ) ein topologischer Raum. Eine Menge A ⊆ X heißt abgeschlossen, wenn Ac offen ist.
12.2.2 Lemma. Sei X eine Menge. Ist T eine Topologie auf X und bezeichnet A die
Menge aller abgeschlossenen Mengen in (X, T ), so gilt:
(A1) ∅, X ∈ A.
(A2) A1 , . . . , An ∈ A, n ∈ N, so folgt A1 ∪ . . . ∪ An ∈ A.
T
(A3) Ai ∈ A, i ∈ I, so folgt i∈I Ai ∈ A.
Beweis. Die Axiome (A1) - (A3) gehen bei Komplementbildung genau in die Axiome
(O1) - (O3) über.
❑
12.2.3 Definition. Sei (X, T ) ein topologischer Raum, und sei B ⊆ X. Die Menge
\n
o
A ⊆ X : A abgeschlossen, A ⊇ B
(12.4)
B :=
heißt der Abschluss von B. Wenn man explizit klarstellen will, bezüglich welcher ToT
pologie der Abschluss zu bilden ist, dann schreibt man für B oft auch B .
Ist C ⊆ B ⊆ X und gilt B ⊆ C, so heißt C dicht in B. Ist C dicht in X, so sagt man,
C ist dicht.
Hat B ⊆ X eine in B dichte und abzählbare Teilmenge, so heißt B separabel.
12.2.4 Lemma. Sei (X, T ) topologischer Raum, B ⊆ X. Dann ist B die kleinste abgeschlossene Menge, die B umfasst.
Beweis. Wegen (A1) ist die Menge, über die in (12.4) der Durchschnitt gebildet wird,
nicht leer. Wegen (A3) ist B abgeschlossen. Ist A abgeschlossen und A ⊇ B, so kommt
A auf der rechten Seite von (12.4) vor, also gilt A ⊇ B.
❑
12.2.5 Lemma. Sei (X, T ) topologischer Raum. Dann gilt:
(i) Für B ⊆ X gilt B ⊆ B.
(ii) Ist C ⊆ B ⊆ X, so folgt C ⊆ B.
(iii) Für C, B ⊆ X folgt C ∪ B = C ∪ B.
12.2. ABGESCHLOSSENE MENGEN
145
(iv) Eine Menge B ⊆ X ist genau dann abgeschlossen, wenn B = B.
Beweis.
(i) Folgt unmittelbar aus der Definition.
(ii) Wegen B ⊇ B ⊇ C ist B eine abgeschlossene Menge, die C umfasst, und da C die
kleinste derartige Menge ist, folgt B ⊇ C.
(iii) Die Menge C ∪ B ist eine abgeschlossene Menge, die C ∪ B umfasst. Also folgt
C ∪ B ⊆ C ∪ B.
Andererseits folgt aus C ⊆ C ∪ B, dass C ⊆ C ∪ B, und genauso B ⊆ C ∪ B.
Damit gilt auch C ∪ B ⊆ C ∪ B.
(iv) B = B gilt genau dann, wenn B die kleinste abgeschlossene Menge ist, die B
enthält. Somit ist das genau dann der Fall, wenn B abgeschlossen ist.
❑
Wenn man sich an die Definition von Abschluss und abgeschlossener Menge in
metrischen Räumen zurück erinnert, so haben wir dort einen Zugang über Häufungspunkte gewählt. Im nächsten Lemma werden wir sehen, dass auch in allgemeinen topologischen Räumen der Abschluss bzw. der Begriff der abgeschlossenen Menge so
charakterisiert werden kann. Um das einzusehen wollen wir zunächst ein kanonisches
Netz konstruieren, das gegen einen gegebenen Punkt konvergiert.
12.2.6 Lemma. Sei (X, T ) topologischer Raum, B ⊆ X und x ∈ X, sodass U ∩ B , ∅
für alle U ∈ U(x). Nun sei
I = {(y, U) : U ∈ U(x), y ∈ U ∩ B} ,
versehen mit der Relation (y1 , U1 ) (y2 , U2 ) :⇔ U1 ⊇ U2 .
Ist (xi )i∈I das Netz definiert durch xi := y, wenn i = (y, U), so konvergiert es gegen x.
Beweis. Die Relation ist offensichtlich reflexiv und transitiv. Sind (z, V), (y, U) ∈ I,
so folgt U ∩ V ∈ U(x). Voraussetzungsgemäß gibt es ein b ∈ U ∩ V ∩ B, und daher
(z, V), (y, U) (b, U ∩ V). Daraus folgt, dass (I, ) gerichtet ist.
Definitionsgemäß ist immer xi ∈ B. Da zu U ∈ U(x) und beliebigen y ∈ U ∩ B
aus i = (z, V) (y, U) folgt, dass xi = z ∈ V ⊆ U, sehen wir, dass (xi )i∈I gegen x
konvergiert.
❑
12.2.7 Proposition. Sei (X, T ) topologischer Raum, B ⊆ X, x ∈ X und W(x) eine
beliebige Filterbasis von U(x). Dann sind folgende Aussagen äquivalent.
(i) x ∈ B.
(ii) ∀U ∈ U(x) : B ∩ U , ∅.
(iii) ∀W ∈ W(x) : B ∩ W , ∅.
(iv) Es gibt ein Netz (xi )i∈I mit xi ∈ B, sodass x ein Grenzwert davon ist.
146
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
Beweis. Laut Definition ist x < B zur Existenz einer abgeschlossenen Menge A
mit x < A, A ⊇ B äquivalent. Da die offenen Mengen genau die Komplemente
der abgeschlossenen sind, ist das äquivalent zur Existenz einer Menge O ∈ T mit
x ∈ O, O ∩ B = ∅. Geht man zu den Negationen über, so erhalten wir, dass
x ∈ B ⇔ ∀O ∈ T : x ∈ O, B ∩ O , ∅ .
Man erkennt sofort, dass die rechte Seite zu (ii) äquivalent ist. (ii) ⇔ (iii) folgt unmittelbar aus der Tatsache, dass W(x) eine Filterbasis von U(x) ist.
Gilt schließlich (iv) und ist U ∈ U(x), so folgt xi ∈ U ∩ B für alle i i0 mit einem
gewissen i0 . Also ist sicher U ∩ B , ∅.
❑
In Analogie zum Begriff des Häufungspunktes / isolierten Punktes einer Menge in
metrischen Räumen in Definition 5.1.8 definieren wir:
12.2.8 Definition (*). Sei (X, T ) topologischer Raum und B ⊆ X. Ein x ∈ X heißt
Häufungspunkt von B, wenn
∀U ∈ U(x) : (B \ {x}) ∩ U , ∅ .
Ein x ∈ B heißt isolierter Punkt von B, wenn
∃U ∈ U(x) : U ∩ B = {x} .
12.2.9 Bemerkung (*). Aus Proposition 12.2.7 erkennt man sofort, dass x genau dann
Häufungspunkt von B ist, wenn x ∈ B \ {x}, bzw. wenn (xi )i∈I → x für ein Netz aus
B \ {x}; vgl. Lemma 5.1.13.
Man erkennt auch leicht aus Proposition 12.2.7, dass B mit der Vereinigung von B
und der Menge aller Häufungspunkte von B übereinstimmt.
12.2.10 Bemerkung. Ist (X, d) ein metrischer Raum, B ⊆ X und nimmt man als W(x)
die Menge aller offenen ǫ-Kugeln um x, so sieht man durch einen Vergleich von Proposition 12.2.7 und (5.1), dass x ∈ B genau dann, wenn x ∈ c(B). Also stimmt der
Abschluss in metrischen Räumen mit dem topologischen Abschluss überein.
Der Grund, warum man in metrischen Räumen das Auslangen mit Folgen findet,
daher x ∈ B genau dann, wenn xn → x für eine Folge aus B, ist die Gültigkeit des
ersten Abzählbarkeitsaxioms. In der Tat, kann man unter der Voraussetzung (ABI) die
Konstruktion in Lemma 12.2.6 folgendermaßen abändern:
Sei W(x) = {Wn : n ∈ N} eine abzählbare Filterbasis von U(x), und wähle xn ∈
B ∩ W1 ∩ · · · ∩ Wn (∈ U(x)). Man erhält somit eine Folge (xn )n∈N in B, sodass zu
vorgegebenem U ∈ U(x) ein N ∈ N mit WN ⊆ U existiert, und daher
xn ∈ W1 ∩ · · · ∩ WN ∩ · · · ∩ Wn ⊆ U für alle n ≥ N .
Somit konvergiert (xn )n∈N für n → ∞ gegen x.
Genauso wie die abgeschlossenen Mengen via Komplementbildung den offenen
Mengen entsprechen, ist das duale Analogon des Abschlusses das sogenannte Innere.
12.2.11 Definition. Das Innere B◦ einer Teilmenge B eines topologischen Raumes
(X, T ) ist definiert durch
[
B◦ =
{O ∈ T : O ⊆ B} .
12.2. ABGESCHLOSSENE MENGEN
147
12.2.12 Fakta.
1. Man sieht unmittelbar, dass x ∈ B◦ ⇔ B ∈ U(x). Ähnlich wie beim Abschluss
sieht man, dass B◦ die größte in B enthaltene offene Menge ist. Damit ist B genau
dann offen, wenn B = B◦ .
2. Da die Komplemente von den offenen Mengen genau die abgeschlossenen Mengen sind, besteht der folgende Zusammenhang zum Abschluss von Mengen.
oc
c \ n
Bc =
A ⊆ X : A abgeschlossen, A ⊇ Bc =
\ n
Oc ⊆ X : O offen, O ⊆ B
oc
= B◦ .
Die Begriffsbildung, die der des Häufungspunktes einer Folge entspricht, ist die des
Häufungspunktes eines Netzes.
12.2.13 Definition (*). Sei (X, T ) ein topologischer Raum und (xi )i∈I ein Netz in X.
Dann heißt x ∈ X Häufungspunkt von (xi )i∈I , falls
∀U ∈ U(x)∀i ∈ I ∃ j ∈ I : i j ∧ x j ∈ U .
Man beachte, dass im Allgemeinen die Menge der Häufungspunkte eines Netzes
(xi )i∈I nicht mit der Menge der Häufungspunkte der Bildmenge {xi : i ∈ I} übereinstimmt; vgl. Definition 12.2.8. Als Beispiel betrachte man dazu einfach konstante Netze.
12.2.14 Bemerkung (*). Vergleicht man das mit Proposition 12.2.7, so ist x Häufungspunkt von (xi )i∈I genau dann, wenn er im Schnitt aller Mengen der Form
{x j : j ∈ I, i j} ,
also in
\
i∈I
{x j : j ∈ I, i j}
(12.5)
enthalten ist.
Offenbar ist ein Limes eines Netzes auch Häufungspunkt. Die Umkehrung gilt im
Allgemeinen nicht, wie man z. B. bei Folgen in R schon unschwer erkennen kann.
Eine alternative Charakterisierung von Häufungspunkten verwendet das Konzept
von Teilnetzen.
12.2.15 Lemma (*). Der Punkt x ist Häufungspunkt von (xi )i∈I genau dann, wenn x
Limes eines Teilnetzes (xi(k) )k∈K ist.
Beweis. Ist (xi(k) )k∈K ein Teilnetz, so gibt es zu i0 ∈ I ein k0 ∈ K, sodass i0 i(k), k0 k. Also gilt
{xi : i ∈ I, i0 i} ⊇ {xi(k) : k ∈ K, k0 k} ,
und damit
\
i0 ∈I
{xi : i ∈ I, i0 i} ⊇
\
k0 ∈K
{xi(k) : k ∈ K, k0 k} .
(12.6)
Ist nun x Limes von (xi(k) )k∈K , so ist er insbesondere Häufungspunkt dieses Teilnetzes,
und wegen (12.6) ein Häufungspunkt von (xi )i∈I .
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
148
Ist umgekehrt x Häufungspunkt von (xi )i∈I , so betrachte die Menge
K = {(i, U) : i ∈ I, U ∈ U(x), xi ∈ U}
versehen mit der Relation (i1 , U1 ) (i2 , U2 ) :⇔ i1 i2 ∧ U1 ⊇ U2 .
Ist (i1 , U1 ), (i2 , U2 ) ∈ K und ist i′ ∈ I, i1 , i2 i′ , so gibt es wegen der Voraussetzung
zu der Umgebung U3 = U1 ∩ U2 von x ein i3 ∈ I mit i′ i3 und xi3 ∈ U3 . Also
(i1 , U1 ), (i2 , U2 ) (i3 , U3 ), und wir sehen, dass (K, ) eine gerichtete Menge ist.
Definieren wir i(i, U) = i, so ist x(i,U) = xi(i,U) , (i, U) ∈ K ein Teilnetz von (xi )i∈I ,
das gegen x konvergiert.
❑
12.2.16 Lemma (*). Ein Netz (xi )i∈I konvergiert genau dann gegen x, wenn x
Häufungspunkt eines jeden Teilnetzes von (xi )i∈I ist.
Beweis. Sei (I, ) eine gerichtete Menge.
Konvergiert (xi )i∈I gegen x, so auch jedes Teilnetz, und daher ist x Häufungspunkt
dieses Teilnetzes.
Ist (xi )i∈I nicht gegen x konvergent, so gibt es eine Umgebung U von x, sodass
∀i ∈ I∃ j ∈ I, i j : x j < U .
Betrachte die gerichtete Menge (K, |K×K ) mit K = {i ∈ I : xi < U}. Dann hat das
Teilnetz (xi )i∈K den Punkt x sicherlich nicht als Häufungspunkt.
❑
12.3 Stetige Abbildungen
12.3.1 Definition. Seien (X, T ) und (Y, O) topologische Räume. Weiters sei f eine
Abbildung, f : X → Y. Ist x ∈ X, so heißt f stetig im Punkt x, wenn gilt:
(C x ) Für alle V ∈ U( f (x)) existiert ein U ∈ U(x) mit f (U) ⊆ V .
Die Abbildung f heißt stetig, wenn sie in jedem Punkt x ∈ X stetig ist.
12.3.2 Beispiel.
Sei (X, T ) topologischer Raum. Die Abbildung idX : (X, T ) → (X, T ) ist stetig.
Denn ist x ∈ X und V ∈ U(idX x) = U(x), so wähle U := V ∈ U(x), dann gilt
idX (U) = V ⊆ V.
Seien (X, T ), (Y, O) topologische Räume und sei a ∈ Y. Die Abbildung
(
(X, T ) → (Y, O)
fa :
x
7→
a
ist stetig. Denn ist x ∈ X und V ∈ U( fa (x)) = U(a), so wähle U := X ∈ U(x),
dann gilt fa (U) = {a} ⊆ V.
Sei X versehen mit der diskreten Topologie T = P(X), sei (Y, O) irgendein topologischer Raum und sei f : (X, P(X)) → (Y, O) irgendeine Abbildung. Dann ist
f stetig. Denn sei x ∈ X, V ∈ U( f (x)). Da {x} offen in der diskreten Topologie
ist, ist {x} ∈ U(x). Wähle U := {x}, dann gilt f (U) = { f (x)} ⊆ V.
12.3. STETIGE ABBILDUNGEN
149
Zieht man in Betracht, dass in einem metrischen Raum die ǫ-Kugeln eine Umgebungsbasis um einen Punkt bilden, so ist das im folgenden Lemma auftretende Kriterium (ii) für die Stetigkeit eine unmittelbare Verallgemeinerung des wohlbekannten ’ǫ’ ’δ’ Kriteriums.
Bei Funktionen auf metrischen Räumen haben wir auch gesehen, dass die Stetigkeit
in einem Punkt x auch durch
xn → x ⇒ lim f (xn ) = f (x)
n→∞
charakterisiert werden kann. Man hat in allgemeinen topologischen Räumen eine ähnliche Charakterisierung, wobei man jedoch nicht mehr mit Folgen das Auslangen findet,
siehe (iii) im folgenden Lemma.
12.3.3 Lemma. Seien (X, T ), (Y, O) topologische Räume, f : X → Y, x ∈ X, und seien
W(x) bzw. W( f (x)) beliebige Umgebungsbasen von x in (X, T ) bzw. von f (x) in (Y, O).
Dann sind folgende Aussagen äquivalent.
(i) f ist im Punkt x stetig.
(ii) Für jedes V ∈ W( f (x)) existiert ein U ∈ W(x) mit f (U) ⊆ V.
(iii) Für jedes gegen x konvergente Netz (xi )i∈I in X folgt, dass das Netz ( f (xi ))i∈I
gegen f (x) konvergiert.
Beweis.
(i) ⇒ (ii) : Sei V ∈ W( f (x)). Dann ist auch V ∈ U( f (x)) und daher gibt es Ũ ∈ U(x)
mit f (Ũ) ⊆ V (vgl. (C x )). Nun ist W(x) Umgebungsbasis von x. Also gibt es ein
U ∈ W(x) mit U ⊆ Ũ und daher f (U) ⊆ V.
(ii) ⇒ (i) : Sei V ∈ U( f (x)), und wähle W ∈ W( f (x)) mit W ⊆ V. Dann gibt es
U ∈ W(x) ⊆ U(x) mit f (U) ⊆ W ⊆ V, also gilt (C x ).
(i) ⇒ (iii) : Konvergiert (xi )i∈I gegen x, und ist V ∈ U( f (x)), so existiert wegen der
Stetigkeit ein U ∈ U(x) mit f (U) ⊆ V. Wegen der Konvergenz findet man ein
ein i0 ∈ I, sodass i i0 ⇒ xi ∈ U und damit auch f (xi ) ∈ V. Also konvergiert
( f (xi ))i∈I gegen f (x).
(iii) ⇒ (i) : Wäre f nicht bei x stetig, so gäbe es eine Umgebung V von f (x), sodass
f (U) ∩ V c , ∅, oder äquivalent U ∩ f −1 (V c ) , ∅, für alle U ∈ U(x). Nach
Lemma 12.2.6 gibt es ein Netz (xi )i∈I in f −1 (V c ), welches gegen x konvergiert.
Andererseits ist aber f (xi ) ∈ V c für alle i ∈ I, womit f (xi ) i∈I sicherlich nicht
gegen f (x) konvergieren kann.
❑
12.3.4 Bemerkung. Mit einer Konstruktion ähnlich wie in Bemerkung 12.2.10 sieht
man, dass, wenn X das erste Abzählbarkeitsaxiom erfüllt – daher insbesondere in metrischen Räumen, die Stetigkeit bei x mit Hilfe von Folgen dadurch charakterisiert werden, dass xn → x ⇒ limn→∞ f (xn ) = f (x).
12.3.5 Satz. Seien (X, T ), (Y, O) topologische Räume, und sei f : X → Y. Dann sind
folgende Aussagen äquivalent:
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
150
(i) f ist stetig.
(ii) f −1 (O) ∈ T für jede offene Menge O ∈ O, d.h. die Urbilder von offenen Mengen
sind offen.
(iii) Die Urbilder von abgeschlossenen Mengen sind abgeschlossen.
(iv) Für jede Teilmenge B ⊆ X gilt f (B) ⊆ f (B).
Beweis.
(i) ⇒ (ii) : Sei O ∈ O. Ist x ∈ f −1 (O), so gilt f (x) ∈ O. Da O offen ist, gilt O ∈ U( f (x)),
und daher gibt es eine Umgebung U ∈ U(x) mit f (U) ⊆ O, d.h. U ⊆ f −1 (O).
Mit Lemma 12.1.11 folgt f −1 (O) ∈ T .
(ii) ⇒ (iii) : Sei A abgeschlossene Teilmenge von Y. Dann ist (A)c offen und wegen
(ii) gilt
h
ic
f −1 (A) = f −1 (Ac ) ∈ T .
Also ist f −1 (A) abgeschlossen.
(iii) ⇒ (iv) : Wegen f (B) ⊇ f (B) gilt gilt f −1 ( f (B)) ⊇ B. Da nach Voraussetzung
f −1 ( f (B)) abgeschlossen in (X, T ) ist, folgt f −1 ( f (B)) ⊇ B und daher f (B) ⊇
f (B).
(iv) ⇒ (i) : Sei x ∈ X und V ∈ U( f (x)) gegeben. Wir müssen ein U ∈ U(x) mit f (U) ⊆
V konstruieren. Dazu setze man W := f −1 (V). Dann gilt f (W c ) = f ( f −1 (V c )) ⊆
V c und daher f (W c ) ⊆ f (W c ) ⊆ V c .
Da V ∈ U( f (x)) und V ∩ V c = ∅ folgt aus Proposition 12.2.7, dass f (x) < V c und
wegen obiger Inklusion x < W c . Wir sehen, dass x ∈ (W c )c = W ◦ =: U ∈ U(x),
wobei U ⊆ W = f −1 (V), und somit f (U) ⊆ f (W) ⊆ V.
❑
−1
Bedingung (ii) in Satz 12.3.5 lässt sich kurz durch f (O) ⊆ T beschreiben, wobei
wir für eine Abbildung f : X → Y die Schreibweise
n
o
f −1 (C) := f −1 (C) : C ∈ C ⊆ P(X) ,
und später auch
n
o
f (B) := f (B) : B ∈ B ⊆ P(Y) ,
für B ⊆ P(X) bzw. C ⊆ P(Y) verwenden.
12.3.6 Lemma. Seien (X, T ) und (Y, O) topologische Räume, wobei (Y, O) Hausdorff
ist. Ist D eine dichte Teilmenge von X, und sind f, g zwei stetige Funktionen von X nach
Y, sodass f |D = g|D , dann folgt f = g.
Beweis. Angenommen f (x) , g(x) für ein x ∈ X \ D. Wegen der HausdorffVoraussetzung gibt es O1 , O2 ∈ O mit O1 ∩ O2 = ∅ und f (x) ∈ O1 , g(x) ∈ O2 . Da
f und g stetig sind, gibt es U1 , U2 ∈ T , x ∈ U1 ∩ U2 , sodass f (U1 ) ⊆ O1 , g(U2 ) ⊆ O2 .
Insbesondere ist U1 ∩ U2 eine nichtleere offene Menge, und hat daher einen nichtleeren
Schnitt mit D. Wir erhalten den Widerspruch:
∅ , f (U1 ∩ U2 ∩ D) = g(U1 ∩ U2 ∩ D) ⊆ O1 ∩ O2 = ∅ .
12.3. STETIGE ABBILDUNGEN
151
❑
Alternativ kann man sich so argumentieren, dass es zu x ∈ X \ D wegen Propo
sition 12.2.7 ein gegen x konvergentes Netz (xi )i∈I in D gibt. Die Netze f (xi ) i∈I und
g(xi ) i∈I konvergieren wegen Lemma 12.3.3 gegen f (x) bzw. g(x). Andererseits sind
diese Netze f (xi ) i∈I und g(xi ) i∈I identisch und haben wegen Lemma 12.1.18 den
selben Grenzwert; also f (x) = g(x).
12.3.7 Lemma. Seien (X, T ), (Y, O), (Z, R) drei topologische Räume und seinen f :
X → Y, g : Y → Z Funktionen. Weiters sei x ∈ X. Ist f stetig im Punkt x und ist g stetig
im Punkt f (x), so ist g ◦ f stetig im Punkt x. Insbesondere ist g ◦ f stetig, wenn f, g es
sind.
Beweis. Sei W ∈ U((g ◦ f )(x)). Da g stetig im Punkt f (x) ist, gibt es V ∈ U( f (x))
mit g(V) ⊆ W. Da f stetig im Punkt x ist, gibt es U ∈ U(x) mit f (U) ⊆ V. Insgesamt
erhalten wir
(g ◦ f )(U) = g( f (U)) ⊆ g(V) ⊆ W .
❑
12.3.8 Definition. Seien (X, T ) und (Y, O) topologische Räume, und sei f : X → Y.
Dann heißt f ein Homöomorphismus von (X, T ) nach (Y, O), wenn f bijektiv ist und
wenn gilt f (T ) = O. Zwei topologische Räume (X, T ) und (Y, O) heißen homöomorph,
wenn es einen Homöomorphismus von (X, T ) nach (Y, O) gibt.
12.3.9 Lemma.
(i) Sei f : (X, T ) → (Y, O) eine bijektive Abbildung. Dann ist f genau dann
Homöomorphismus, wenn sowohl f als auch f −1 stetig sind.
(ii) Sind f : (X, T ) → (Y, O), g : (Y, O) → (Z, R) Homöomorphismen, so ist auch
g ◦ f : (X, T ) → (Z, R) ein Homöomorphismus.
(iii) Die Abbildung idX : (X, T1 ) → (X, T2 ) ist ein Homöomorphismus genau dann
wenn T1 = T2 .
Beweis.
(i) Ist f bijektiv, so ist f (T ) = O genau dann wenn f −1 (O) ⊆ T und f (T ) ⊆ O.
(ii) Folgt unmittelbar aus (i) und Lemma 12.3.7.
(iii) Das folgt unmittelbar aus idX (T1 ) = T1 .
❑
12.3.10 Beispiel.
Die Abbildung tan : (− π2 , π2 ) → R ist ein Homöomorphismus, wenn man (− π2 , π2 )
und R jeweils mit der Euklidischen Topologie versieht.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
152
Ist eine gegebene Menge Y mit zwei verschiedenen Metriken d1 und d2 versehen,
die aber äquivalent sind, dh. es gibt α, β > 0, sodass für alle x, y ∈ Y
αd1 (x, y) ≤ d2 (x, y) ≤ d1 (x, y) ,
(12.7)
so zeigt man leicht mit Hilfe der Charakterisierung der Stetigkeit in metrischen
Räumen durch Folgen (siehe Proposition 6.1.4), dass dann idY : (Y, d1 ) → (Y, d2)
und idY : (Y, d2) → (Y, d1 ) beide stetig sind. Also induzieren diese Metriken die
selbe Topologie, dh. T (d1 ) = T (d2 ). Siehe dazu auch Übungsbeispiel 5.1.
Sei X ein Vektorraum versehen mit zwei Normen k.k1 und k.k2 . Sind diese äquivalent (vgl. Definition 9.2.1), so sieht man sofort, dass die jeweils induzierten
Metriken ebenfalls äquivalent sind. Somit stimmen die Topologien, die von den
zu k.k1 und k.k2 gehörigen Metriken erzeugt werden, überein.
Man betrachte C versehen mit der euklidischen Metrik d2 und mit der chordalen
Metrik χ. Es ist wohlbekannt, dass zn → z in C bezüglich d2 genau dann, wenn
zn → z bezüglich χ. Also ist die Abbildung idC als Abbildung von (C, d2 ) nach
(C, χ) und auch als Abbildung von (C, χ) nach (C, d2 ) stetig. Somit gilt T (d2 ) =
T (χ), obwohl die beiden Metriken nicht äquivalent im Sinne von (12.7) sind.
Man betrachte einerseits C ∪ {∞} versehen mit der chordalen Metrik χ. Andererseits sei S die Oberfläche der Kugel mit Durchmesser 1 im R3 , die so auf
die Ebene R2 zum liegen kommt, dass Ihr Südpol den Nullpunkt berührt. Wir
versehen S mit d2 , dh.
q
d2 ((α, β, γ)T , (ξ, η, ζ)T ) = (α − ξ)2 + (β − η)2 + (γ − ζ)2 .
Die Stereographische Projektion σ : S → C ∪ {∞} ist bekannterweise eine
Isometrie, dh. χ(σ(x), σ(y)) = d2 (x, y). Also sind σ und σ−1 stetig, und σ ist
somit ein Homöomorphismus.
12.4 Basis, Subbasis
Wir betrachten nun eine feste Menge X und die Menge x(X) aller möglichen Topologien auf X. Die Elemente T von x(X) sind also Teilmengen von P(X), und daher
x(X) ⊆ P(P(X)).
Wir sagen eine Topologie T1 ist gröber als eine Topologie T2 bzw. T2 feiner als
T1 , wenn T1 ⊆ T2 . Aus Satz 12.3.5 erkennt man leicht, dass T1 genau dann gröber als
T2 ist, wenn id : (X, T2 ) → (X, T1 ) stetig ist.
12.4.1 Lemma. Ist Ti , i ∈ I, eine Familie von Topologien, so ist es auch ∩i∈I Ti . In der
Tat, ist dieser Schnitt die feinste Topologie, die gröber als alle Ti ist.
Für ein Mengensystem C ⊆ P(X) ist
\
T (C) =
{T ∈ x(X) : C ⊆ T }
(12.8)
die gröbste Topologie, die C enthält.
Beweis. Wir müssen nachweisen, dass ∩i∈I Ti die Axiome (O1) - (O3) erfüllt. Die
Mengen ∅, X sind in allen Ti enthalten, da diese ja Topologien sind. Also sind diese
Mengen auch im Schnitt enthalten. Es folgt (O1).
12.4. BASIS, SUBBASIS
153
Aus O1 , O2 ∈ ∩i∈I Ti folgt O1 , O2 ∈ Ti , i ∈ I, und somit O1 ∩ O2 ∈ Ti , i ∈ I. Also
O1 ∩ O2 ∈ ∩i∈I Ti , und daher (O2).
Sind O j ∈ ∩i∈I Ti , j ∈ J, so folgt für jedes i ∈ I, dass O j ∈ Ti , j ∈ J, und weiter
S
S
j∈J O j ∈ Ti . Nun gilt das wieder für alle i ∈ I, also
j∈J O j ∈ ∩i∈I Ti , und somit (O3).
Klarerweise ist ∩i∈I Ti in allen Ti enthalten. Ist andererseits T ⊆ Ti , i ∈ I, so auch
T ⊆ ∩i∈I Ti . Also ist der Schnitt die feinste in allen Ti enthaltene Topologie.
Nun enthält der Schnitt T (C) von Mengensystemen, die alle C enthalten, ebenfalls
C. Ist andererseits T ⊇ C, so gehört T zur Menge auf der linken Seite von (12.8) und
daher T ⊇ T (C). Also ist T (C) die gröbste Topologie, die C enthält.
❑
12.4.2 Definition. Sei (X, T ) ein topologischer Raum. Ein Mengensystem B ⊆ P(X)
heißt Basis von T , wenn B ⊆ T und wenn es für alle O ∈ T und x ∈ O ein B ∈ B mit
x ∈ B ⊆ O gibt.
Man sagt ein topologischer Raum (X, T ) erfüllt das zweite Abzählbarkeitsaxiom
(ABII), wenn T eine abzählbare Basis besitzt.
Ein Mengensystem C ⊆ P(X) heißt Subbasis von T , wenn C ⊆ T und wenn es für
alle O ∈ T , O , X, und x ∈ O endlich viele C1 , . . . , Cn ∈ C mit x ∈ C1 ∩ · · · ∩ Cn ⊆ O
gibt.
12.4.3 Bemerkung. Sei O ⊆ X und B ⊆ P(X). Die Tatsache, dass es zu jedem x ∈ O
ein B ∈ B gibt mit x ∈ B ⊆ O, kann man kurz auch als
[
O=
B
B∈B, B⊆O
schreiben.
12.4.4 Bemerkung. Offensichtlich ist C ⊆ P(X) genau dann eine Subbasis von T , wenn
das Mengensystem E aller endlichen Schnitte von C samt X, also
E := {X} ∪
n
n\
i=1
Ci : n ∈ N, C1 , . . . , Cn ∈ C}
eine Basis von T abgibt. Klarerweise enthält E das Mengensystem C. Der Grund,
warum man X extra in E hineingeben muss ist der, dass wir in Definition 12.4.2 für
Subbasis nur verlangen, dass es zu jedem offenen O ungleich X und x ∈ O Mengen
C1 , . . . , Cn ∈ C gibt mit x ∈ C1 ∩ · · · ∩ Cn ⊆ O.
12.4.5 Beispiel.
Ist (Y, d) ein metrischer Raum, so folgt aus der Definition der von d induzierten
Topologie T (d) sofort, dass
{Uǫ (x) : x ∈ Y, ǫ > 0}
eine Basis von T (d) ist.
Die Euklidische Topologie T (d2 ) auf R hat die Menge aller offenen Intervalle
{(a, b) ⊆ R : a, b ∈ R, a < b}
154
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
als Basis. Da man zu a < x < b aus R wegen der Dichteeigenschaft von Q (siehe
Satz 2.8.3) sicherlich s, t ∈ Q findet, sodass a < s < x < t < b, ist auch
{(s, t) ⊆ R : s, t ∈ Q, s < t}
eine Basis von T (d2 ). Also ist (ABII) erfüllt.
Wegen (a, b) = (a, +∞) ∩ (−∞, b) folgt damit unmittelbar, dass
{(a, +∞) ⊆ R : a ∈ R} ∪ {(−∞, b) ⊆ R : b ∈ R}
eine Subbasis von T (d2 ) auf R ist.
Betrachte den R p versehen mit d∞ . Da dort für die ǫ-Kugeln
Uǫ (x) = (ξ1 − ǫ, ξ1 + ǫ) × · · · × (ξ p − ǫ, ξ p + ǫ)
gilt, wobei x = (ξ j ) pj=1 , folgt, dass die Menge aller p-dimensionalen Quader
{(a1 , b1 ) × · · · × (a p , b p ) : a j , b j ∈ R, a j < b j , j = 1, . . . , p}
eine Basis von T (d∞ ) abgibt. Wegen T (d∞ ) = T (d2 ) (siehe Beispiel 12.3.10)
sind diese trivialerweise auch Basis von T (d2 ).
Ähnlich wie für R sieht man, dass auch
{(s1 , t1 ) × · · · × (s p , t p ) : s j , t j ∈ Q, s j < t j , j = 1, . . . , p}
eine abzählbare Basis von T (d2 ) ist.
12.4.6 Satz. Ist B ⊆ P(X) Basis einer gegebenen Topologie T auf X, so erfüllt B
(B1) Ist B1 , B2 ∈ B, x ∈ B1 ∩ B2 , so existiert B3 ∈ B mit x ∈ B3 ⊆ B1 ∩ B2 .
S
(B2) B∈B B = X.
Außerdem ist T die gröbste Topologie, die B enthält, dh. T = T (B).
Ist C ⊆ P(X) Subbasis einer gegebenen Topologie T auf X, so ist T die gröbste
Topologie, die C enthält, dh. T = T (C).
Beweis. Wegen B ⊆ T muss T (B) ⊆ T . Ist andererseits O ∈ T , so folgt aus der
Tatsache, dass B eine Basis ist, zusammen mit Bemerkung 12.4.3
[
O=
B.
(12.9)
B∈B, B⊆O
Wegen B ⊆ T (B) und wegen (O3) ist jede dieser Mengen auch in T (B), dh. T ⊆ T (B).
Aus (12.9) angewandt auf O = X sieht man unmittelbar, dass (B2) erfüllt ist.
S
Für B1 , B2 ∈ B ⊆ T gilt B1 ∩ B2 ∈ T . Aus B1 ∩ B2 = {B ∈ B : B ⊆ B1 ∩ B2 } folgt
für jedes x ∈ B1 ∩ B2 die Existenz eines B3 ∈ B mit x ∈ B3 ⊆ B1 ∩ B2 . Also gilt auch
(B1).
Ist schließlich C ⊆ P(X) eine Subbasis von T , so folgt aus Bemerkung 12.4.4, dass
E eine Basis von T ist, und daher T = T (E). Wegen C ⊆ E gilt T (C) ⊆ T (E).
Ist andererseits E ∈ E, so gilt E = X oder E = C1 ∩ · · · ∩ Cn für
C1 , . . . , Cn ∈ C ⊆ T (C). Aus (O1) bzw. (O2) folgt dann E ∈ T (C), und daher
E ⊆ T (C). Somit gilt auch T (E) ⊆ T (C), und insgesamt T = T (E) = T (C).
❑
12.4. BASIS, SUBBASIS
155
12.4.7 Lemma. Seien (X, T ) und (Y, O) topologische Räume und f : X → Y eine
Abbildung. Ist C eine Subbasis von O, so ist f genau dann stetig, wenn f −1 (C) ⊆ T .
Beweis. Aus der Stetigkeit folgt unmittelbar f −1 (C) ⊆ f −1 (O) ⊆ T .
Ist umgekehrt f −1 (C) ⊆ T , so prüft man leicht nach, dass
O′ := {O′ ⊆ Y : f −1 (O′ ) ∈ T }
die Axiome (O1) - (O3) erfüllt, dh. eine Topologie ist. Da laut Voraussetzung C ⊆ O′ ,
muss auch O = T (C) ⊆ O′ , und daher f −1 (O) ∈ T für alle O ∈ O.
❑
Wir wollen nun den umgekehrten Weg wie in Satz 12.4.6 gehen.
12.4.8 Satz. Erfüllt B ⊆ P(X) die Axiome (B1) und (B2), so ist B eine Basis von T (B).
Außerdem stimmt T (B) mit dem System T aller Mengen O ⊆ X der Bauart
[
O=
B
B∈V
mit einem (von O abhängigen) Teilsystem V ⊆ B überein; also T (B) = T , wobei
[
T = {O ⊆ X : ∃V ⊆ B, O =
B}.
(12.10)
B∈V
Ist C ⊆ P(X), so ist C eine Subbasis von T (C). Außerdem stimmt T (C) mit dem
System
[
{O ⊆ X : ∃V ⊆ E, O =
B}
(12.11)
B∈V
überein, wobei
E := {X} ∪
n
n\
i=1
Ci : n ∈ N, C1 , . . . , Cn ∈ C} .
die Axiome (B1) und (B2) erfüllt.
Beweis.
Wir zeigen zunächst, dass T definiert in (12.10) eine Topologie auf X ist.
Zunächst ist
[
∅=
B∈T,
B∈∅
und wegen (B2)
X=
[
B∈B
B∈T .
Also gilt (O1). Die Bedingung (O3) folgt aus
[ [ [
B =
i∈I
B∈Vi
S
B∈ i∈I Vi
B.
S
S
Es bleibt (O2) zu zeigen. Seien also O1 = B∈V1 B, O2 = B∈V2 B gegeben.
Jedes x ∈ O1 ∩ O2 liegt somit in einem B1 ∈ V1 und einem B2 ∈ V2 . Nach (B1)
gibt es ein B ∈ B mit x ∈ B ⊆ B1 ∩ B2 ⊆ O1 ∩ O2 . Wir erhalten (vgl. Bemerkung
12.4.3)
[
B,
O1 ∩ O2 =
B∈V
wobei V := {B ∈ B : B ⊆ O1 ∩ O2 }. Also O1 ∩ O2 ∈ T .
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
156
Offensichtlich gilt B ⊆ T . Ist x ∈ O ∈ T , so folgt aus (12.10), dass x ∈ B ⊆ O
für ein gewisses B ∈ B. Also ist B Basis von T , und wegen Satz 12.4.6 ist damit
T die gröbste Topologie T (B), die B umfasst.
Ist C ⊆ P(X), so sieht man unmittelbar, dass X ∈ E und dass mit E1 , E2 ∈ E auch
E1 ∩ E2 ∈ E. Insbesondere erfüllt E (B1) und (B2). Nach dem oben gezeigten
ist E Basis von T (E), wobei T (E) mit der Topologie in (12.11) übereinstimmt.
Wegen Bemerkung 12.4.4 bedeutet das, dass C eine Subbasis von T (E) ist, und
aus Satz 12.4.6 folgt damit schließlich T (C) = T (E).
❑
12.5 Initiale Topologie
Mit dem Konzept Basis und Subbasis können wir auf einer gegebenen Menge ausgezeichnete Topologien definieren, die gewisse Eigenschaften haben.
12.5.1 Satz. Seien X eine Menge, (Yi , Ti ), i ∈ I, topologische Räume und fi : X → Yi ,
i ∈ I, Abbildungen.
fi
fj
X
fk
(Yi , Ti )
(Y j , T j )
(Yk , Tk )
Dann existiert genau eine Topologie T auf X mit der Eigenschaft
(IN1 ) T ist die gröbste Topologie auf X, sodass alle Abbildungen fi : (X, T ) →
(Yi , Ti ), i ∈ I, stetig sind.
Diese Topologie heißt initiale Topologie bezüglich der fi . Für sie gilt
S
(IN2 ) i∈I fi−1 (Ti ) ist eine Subbasis von T ,
und
(IN3 ) Ist (Y, O) ein beliebiger topologischer Raum und f : Y → X, so ist f : (Y, O) →
(X, T ) genau dann stetig, wenn alle Abbildungen
fi ◦ f : (Y, O) → (Yi , Ti ), i ∈ I ,
stetig sind.
Beweis.
12.5. INITIALE TOPOLOGIE
157
Ist T ′ eine beliebige Topologie auf X, so ist fi : (X, T ′ ) → (Xi , Ti ) genau dann
stetig, wenn fi−1 (Ti ) ⊆ T ′ . Also sind alle fi genau dann stetig, wenn
[
fi−1 (Ti ) ⊆ T ′ .
(12.12)
i∈I
S
Nach Lemma 12.4.1 gibt es eine gröbste Topologie T = T ( i∈I fi−1 (Ti )), die
(12.12) erfüllt. Damit ist aber auch T die gröbste Topologie, sodass alle fi stetig
sind. Also gilt (IN1 ).
S
Wegen Satz 12.4.8 ist i∈I fi−1 (Ti ) Subbasis von T , und es gilt auch (IN2 ).
Sei f : (Y, O) → (X, T ), wobei T die initiale Topologie der fi , i ∈ I, ist. Im Falle
der Stetigkeit von f sind auch alle fi ◦ f : (Y, O) → (Yi , Ti ) als Zusammensetzung
stetiger Abbildungen stetig.
Seien umgekehrt alle fi ◦ f stetig, d.h. es gelte ( fi ◦ f )−1 (Ti ) ⊆ O. Dann folgt
f −1 ( fi−1 (Ti )) ⊆ O und damit
[
f −1 (
fi−1 (Ti )) ⊆ O .
i∈I
S
Da i∈I fi−1 (Ti ) eine Subbasis von T ist, folgt aus Lemma 12.4.7, dass f stetig
ist. Die initiale Topologie T hat also die Eigenschaft (IN3 ).
❑
12.5.2 Bemerkung. Die initiale Topologie T ist in der Tat die einzige Topologie T ′ mit
der Eigenschaft (IN3 ). Um das einzusehen, sei T ′ eine weitere Topologie auf X mit der
Eigenschaft (IN3 ).
Da die Abbildung idX : (X, T ′ ) → (X, T ′ ) trivialerweise stetig ist, folgt aus (IN3 )
angewandt auf T ′ , dass alle fi ◦ idX : (X, T ′ ) → (Yi , Ti ) stetig sind. Aus (IN1 ) folgt
T ⊆ T ′.
Für idX : (X, T ) → (X, T ′ ) sind andererseits alle Abbildungen fi ◦ idX = fi :
(X, T ) → (Yi , Ti ) stetig. Mit (IN3 ) angewandt auf T ′ folgt die Stetigkeit von idX :
(X, T ) → (X, T ′ ), und daher T ′ ⊆ T . Insgesamt ist T ′ = T .
12.5.3 Lemma. Mit der Notation aus Satz 12.5.1 sei (x j ) j∈J ein Netz in X. Dieses
konvergiert bzgl. T gegen ein x ∈ X genau dann, wenn fi (x j ) j∈J für alle i ∈ I gegen
fi (x) konvergiert.
Beweis. Konvergiert (x j ) j∈J gegen x bzgl. T , so folgt aus der Stetigkeit der fi mit
Lemma 12.3.3, dass fi (x j ) j∈J gegen fi (x) konvergiert.
Gelte umgekehrt, dass fi (x j ) j∈J gegen fi (x) für alle i ∈ I konvergiert. Für ein
U ∈ U(x) mit oBdA. U , X und O ∈ T mit x ∈ O ⊆ U folgt aus der Tatsache,
S
dass i∈I fi−1 (Ti ) eine Subbasis von T ist (vgl. (IN2 ) aus Satz 12.5.1), und Definition
12.4.2, dass
x ∈ fi−1
(O1 ) ∩ · · · ∩ fi−1
(Om ) ⊆ O ,
1
m
wobei i1 , . . . , im ∈ I, O1 ∈ Ti1 , . . . , Om ∈ Tim . Also folgt fik (x) ∈ Ok , k = 1, . . . , m, und
laut Voraussetzung gibt es Indizes j1 , . . . , jm , ∈ J, sodass j jk ⇒ fik (x j ) ∈ Ok , k =
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
158
1, . . . , m. Ist nun j0 ∈ J derart, dass j0 jk , k = 1, . . . , m, so folgt für j j0 jedenfalls
fik (x j ) ∈ Ok , k = 1, . . . , m, und daher
x j ∈ fi−1
(O1 ) ∩ · · · ∩ fi−1
(Om ) ⊆ O ⊆ U .
1
m
❑
Die Konstruktion der Initialen Topologie ist assoziativ.
g ik ◦
fi
g i,k
Yi
fi
gi,l
(Zi,l , Ti,l )
gil ◦ fi
X
fj
g jk ◦ f j
Yj
g jl ◦
fj
(Zi,k , Ti,k )
(Z j,k , T j,k )
g j,k
g j,l
(Z j,l , T j,l )
Abbildung 12.2: Veranschaulichung der Assoziativität der Initialtopologiebildung
12.5.4 Korollar. Seien X, Yi , i ∈ I, topologische Räume und fi : X → Yi , i ∈ I, Abbildungen. Weiters seien zu jedem i ∈ I eine Indexmenge Ji und topologische Räume
(Zi, j , Ti, j ) und Abbildungen gi, j : Yi → Zi, j gegeben.
Versieht man Yi mit der initialen Topologie Ti bezüglich der Abbildungen gi, j , j ∈
Ji , so stimmt die initiale Topologie T1 auf X bezüglich der Abbildungen fi : X →
Yi , i ∈ I, mit der initialen Topologie T2 auf X bezüglich der Abbildungen gi, j ◦ fi : X →
Zi, j , i ∈ I, j ∈ Ji , überein.
Beweis. Wir versehen die Yi mit der initialen Topologie Ti bezüglich der Abbildungen
gi, j , j ∈ Ji . Ist T irgendeine Topologie auf X, so ist wegen (IN3 ) angewandt auf die
(Yi , Ti ) die Tatsache, dass alle Abbildungen fi : X → Yi , i ∈ I, stetig sind, dazu
äquivalent, dass alle Abbildungen gi, j ◦ fi : X → Zi, j , i ∈ I, j ∈ Ji , stetig sind.
Also stimmt die gröbste aller Topologien, die die erste Bedingung erfüllen, –
wegen (IN1 ) ist das T1 – mit der gröbsten aller Topologien, die die zweite Bedingung
erfüllen, – wegen (IN1 ) ist das T2 – überein.
❑
12.6 Spur- und Produkttopologie
12.6.1 Definition. Sei (Y, T ) ein topologischer Raum und X ⊆ Y. Weiters sei ι : X →
Y die kanonische Einbettung, ι(x) = x. Die initiale Topologie auf X bezüglich der
12.6. SPUR- UND PRODUKTTOPOLOGIE
159
Abbildung ι heißt die Spurtopologie von T auf X und wird bezeichnet als T |X . Man
spricht von (X, T |X ) als einem Teilraum von (Y, T ).
12.6.2 Fakta.
1. Wegen Satz 12.5.1 ist
ι−1 (T ) = {O ∩ X : O ∈ T } ⊆ P(X)
eine Subbasis für T |X . Nun erfüllt diese Menge selbst schon (O1) − (O3), d.h. es
gilt
T |X = {O ∩ X : O ∈ T } .
(12.13)
Damit erhält man leicht auch, dass der Umgebungsfilter U|X (x) eines Elementes
x ∈ X bezüglich T |X genau
U|X (x) = {U ∩ X : U ∈ U(x)}
ist.
2. Aus (12.13) erhält man auch, dass das System A|X der in (X, T |X ) abgeschlossenen Mengen gegeben ist durch
A|X = {A ∩ X : A ∈ A} .
Daraus folgt auch unmittelbar, dass für B ⊆ X
T |X
B
T
= B ∩X,
(12.14)
3. Erfüllt (Y, T ) das Axiom (T 2 ), so folgt aus (12.13) auch, dass in Folge (X, T |X )
dieses Axiom erfüllt.
4. Aus (IN3 ) folgt, dass eine Funktion f : (Z, O) → (X, T |X ) genau dann stetig ist,
wenn f : (Z, O) → (Y, T ) stetig ist.
5. Ist (x j ) j∈J ein Netz in X und x ∈ X, so folgt aus Lemma 12.5.3, dass (x j ) j∈J genau
dann gegen x bzgl. T konvergiert, wenn (x j ) j∈J bzgl. T |X gegen x konvergiert.
6. Ist schließlich X ⊆ Z ⊆ Y, so gilt wegen Korollar 12.5.4
T |X = (T |Z )|X .
(12.15)
12.6.3 Beispiel. Sei (Y, d) ein metrischer Raum, und sei X ⊆ Y versehen mit der Einschränkung von d|X×X . Klarerweise ist (X, d|X×X ) ein metrischer Raum.
Die von d|X×X auf X erzeugte Topologie ist genau die Spurtopologie, die von T (d)
auf X induziert wird:
Ist O ∈ T (d) und x ∈ O ∩ X, so gibt es ein ǫ > 0 mit UǫY (x) ⊆ O. Daraus folgt, dass
die ǫ-Kugel UǫX (x) = UǫY (x) ∩ X um x bezüglich d|X×X in O ∩ X enthalten ist. Also ist
jede Menge aus T (d)|X offen bezüglich d|X×X .
Ist umgekehrt P ∈ T (d|X×X ), so wähle man für jedes x ∈ P ein ǫ x > 0, sodass die
ǫ x -Kugel UǫXx (x) = X ∩ UǫYx (x) in X in P enthalten ist. Es folgt
[
[
P=
X ∩ UǫYx (x) = X ∩
UǫYx (x) .
x∈P
x∈P
Somit ist P der Schnitt einer in Y offenen Menge und X, also P ∈ T (d)|X .
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
160
Ein unscheinbares aber recht oft anwendbares Ergebnis ist folgendes.
12.6.4 Lemma. Seien (X, T ), (Y, O) topologische Räume und A1 , . . . , Am ⊆ X Teilmengen mit A1 ∪ · · · ∪ Am = X, wobei entweder alle Ak , k = 1, . . . , m, abgeschlossen oder
alle diese Teilmengen offen sind.
Sind fk : Ak → Y, k = 1, . . . , m stetige Funktionen, wobei die Ak mit der Spurtopologie (vgl. Definition 12.6.1) versehen sind, sodass f j und fk auf A j ∩ Ak für alle
j, k ∈ {1, . . . , m} übereinstimmen, dann ist auch die Funktion f1 ∪ · · · ∪ fm : X → Y 2
stetig.
Beweis. Seien A1 , . . . , Am ⊆ X alle abgeschlossen. Der offene Fall ist ähnlich zu beweisen. Für ein abgeschlossenes F ⊆ Y gilt zunächst
( f1 ∪ · · · ∪ fm )−1 (F) = f1−1 (F) ∪ · · · ∪ fm−1 (F) .
Wegen der Stetigkeit von fk : Ak → Y ist fk−1 (F) abgeschlossen in der Spurtopologie
T |Ak , und somit von der Bauart C ∩ Ak für eine in X abgeschlossene Menge C. Als
Schnitt zweier in X abgeschlossener Mengen ist fk−1 (F) in X abgeschlossen.
Als Vereinigung abgeschlossener Mengen ist dann auch ( f1 ∪ · · · ∪ fm )−1 (F)
abgeschlossen. Da F beliebig war, ist somit f1 ∪ · · · ∪ fm stetig.
❑
Q
12.6.5 Definition. Seien (Xi , Ti ), i ∈ I, topologische Räume, und sei X := i∈I Xi . Die
initiale Topologie auf X bezüglich der Familie πi : X → Xi der kanonischen Projektionen
πi (xk )k∈I = xi
Q
heißt die Produkttopologie der Ti auf X und wird bezeichnet mit i∈I Ti .
12.6.6 Fakta.
1. Für ein O ⊆ Xi gilt
π−1
i (O) =
Y
Ok
k∈I
wobei Ok = Xk , k , i, und Oi = O ist. Wieder mit (IN2 ) und Bemerkung 12.4.4
erhält man daraus, dass die Mengen der Gestalt
Y
Ok ,
(12.16)
k∈I
wobei Ok ∈ Tk , k ∈ I, und für alle k ∈ I bis auf endlich viele Ok = Xk gilt, eine
Q
Basis für i∈I Ti bilden.
Q
2. Die kanonischen Projektionen πi : X → Xi bilden offene Mengen aus k∈I Tk
auf offene Mengen aus Ti ab, also sind sie offene Abbildungen.
Um das einzusehen, sei zunächst i ∈ I fest. Dann gilt für Basismengen der GeQ
stallt (12.16) offenbar πi ( k∈I Ok ) = Oi . Also ist das Bild unter πi einer jeden
Q
Menge aus dieser Basis offen in (Xi , Ti ). Da jede offene Menge in k∈I Tk Vereinigung von Basismengen ist, folgt die Behauptung.
2 Das
ist die (wohldefinierte) Funktion, die für k = 1, . . . , m auf Ak mit fk übereinstimmt.
12.6. SPUR- UND PRODUKTTOPOLOGIE
161
3. Weiters sieht man leicht mit Hilfe der Basis bestehend aus Mengen der Form
(12.16), dass für einen Punkt (xi )i∈I ∈ X die Mengen
Y
Ui ,
i∈I
wobei Ui ∈ U(xi ), i ∈ I, und Ui = Xi für alle bis auf endlich viele i, eine UmgeQ
bungsbasis bezüglich i∈I Ti bilden.
Q
4. Aus Lemma 12.5.3 folgt, dass für ein Netz (x j ) j∈J und einem Punkt x aus i∈I Xi ,
d.h. x j = (ξ j,i )i∈I und x = (ξi )i∈I mit ξ j,i , ξi ∈ Xi ,
j∈J
j∈J
x j −→ x ⇔ ∀i ∈ I : ξ j,i −→ ξi .
(12.17)
Q
5. Aus (12.17) folgt, dass für abgeschlossene Ai ⊆ Xi , i ∈ I, das Produkt i∈I Ai ⊆
Q
i∈I Xi ebenfalls abgeschlossen ist. Alternativ kann man das auch daraus folgern,
dass
Y
\
Ai =
π−1
i (Ai )
i∈I
i∈I
als Durchschnitt von Urbildern abgeschlossener Mengen unter stetigen Funktionen selber wieder abgeschlossen ist.
12.6.7 Bemerkung. Wendet man diese Konstruktion der Produkttopologie etwa auf
zwei Räume (X1 , T1 ) und (X2 , T2 ) an, d.h. I = {1, 2}, so bilden insbesondere alle Mengen der Bauart O1 × O2 mit O1 ⊆ X1 , O2 ⊆ X2 eine Basis der Produkttopologie T1 × T2 .
Außerdem sind alle Mengen A1 × A2 für abgeschlossene A1 ⊆ X1 , A2 ⊆ X2 , ebenfalls
abgeschlossen.
12.6.8 Beispiel. Seien (Y1 , d1 ) und (Y2 , d2 ) zwei metrische Räume, und sei d : Y1 ×Y2 →
R definiert als d (x1 , x2 ), (y1 , y2 ) = max(d1 (x1 , y1 ), d2 (x2 , y2 )), vgl. Fakta 8.7.8.
Wir wissen schon, dass d eine Metrik auf Y1 × Y2 ist, und dass Uǫ (x1 , x2 ) =
Uǫ (x1 ) × Uǫ (x2 ).
Die von dieser Metrik erzeugte Topologie T (d) stimmt mit der Produkttopologie
von T (d1 ) und T (d2 ) überein. Um das einzusehen, sei O ⊆ Y1 × Y2 . Diese Menge ist in
T (d) genau dann, wenn
∀(x1 , x2 ) ∈ O ⇒ ∃ǫ > 0 : Uǫ (x1 , x2 ) = Uǫ (x1 ) × Uǫ (x2 ) ⊆ O ,
was aber äquivalent zu
∀(x1 , x2 ) ∈ O ⇒ ∃O1 ∈ T (d1 ), O2 ∈ T (d2 ) : (x1 , x2 ) ∈ O1 × O2 ⊆ O
ist. Da die Mengen der Form O1 × O2 eine Basis von T (d1 ) × T (d2 ) darstellen, bedeutet
das genau O ∈ T (d1 ) × T (d2 ).
Folgendes Korollar samt Beweis funktioniert übrigens auch für Funktionen mit
Werten in einem normierten Raum.
12.6.9 Korollar. Sei (X, T ) ein topologischer Raum, und f, g : X → R (C), sowie
λ, µ ∈ R (C). Sind f und g stetig, so auch λ f +µg und f g. Ist zusätzlich f (x) , 0, x ∈ X,
so ist auch 1f stetig.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
162
Beweis. Die Funktion (x, y) 7→ λx + µy, R × R → R ist bekannterweise stetig. Nach
(IN3 ) angewandt auf R × R ist a 7→ ( f (a), g(a)), X → R × R ebenfalls stetig. λ f + µg
ist nun als Zusammensetzung dieser Funktionen ebenfalls stetig.
Der Beweis für f g und 1f verläuft analog.
❑
12.7 Finale Topologie*
12.7.1 Satz. Sei X eine Menge, seien (Yi , Ti ), i ∈ I, topologische Räume und fi : Yi →
X, i ∈ I, Abbildungen.
(Yi , Ti )
fi
fj
(Y j , T j )
X
fk
(Yk , Tk )
Dann existiert genau eine Topologie T auf X mit der Eigenschaft:
(FI1 ) T ist die feinste Topologie auf X, sodass alle Abbildungen fi : (Yi , Ti ) → (X, T ),
i ∈ I, stetig sind.
Diese Topologie heißt finale Topologie bezüglich der fi . Sie ist gegeben durch
(FI2 ) T = {O ⊆ X : fi−1 (O) ∈ Ti für alle i ∈ I},
und erfüllt:
(FI3 ) Ist (Y, O) ein topologischer Raum und f : X → Y, so ist f : (X, T ) → (Y, O)
stetig genau dann, wenn alle Abbildungen
f ◦ fi : (Yi , Ti ) → (Y, O), i ∈ I ,
stetig sind.
Beweis.
Wir betrachten die durch (FI2 ) definierte Menge T ⊆ P(X). Es gilt
fi−1 (O1 ∩ . . . ∩ On ) = fi−1 (O1 ) ∩ . . . ∩ fi−1 (On )
und
fi−1
[
j∈J
[
fi−1 (O j ) .
Oj =
j∈J
Sind also O1 , . . . , On ∈ T bzw. O j ∈ T , j ∈ J, so folgt, da die Ti Topologien
S
sind, O1 ∩ . . . ∩ On ∈ T und j∈J O j ∈ T . D.h. T erfüllt (O2), (O3). Wegen
fi−1 (∅) = ∅ und fi−1 (X) = Yi gilt auch (O1) für T .
12.7. FINALE TOPOLOGIE*
163
Definitionsgemäß gilt fi−1 (T ) ⊆ Ti , womit alle fi : (Yi , Ti ) → (X, T ) stetig sind.
Ist T ′ eine Topologie auf X, sodass alle fi stetig sind, so folgt fi−1 (O) ∈ Ti für
alle O ∈ T ′ , also O ∈ T . Also gilt T ′ ⊆ T , und T erfüllt (FI1 ). Klarerweise gibt
es höchstens eine Topologie mit der Eigenschaft (FI1 ).
Sei T die finale Topologie bezüglich der fi , und sei f : X → Y. Ist f stetig,
so ist auch f ◦ fi : (Yi , Ti ) → (X, T ) → (Y, O) als Zusammensetzung stetiger
Abbildungen stetig. Sei umgekehrt f ◦ fi stetig für alle i. Dann gilt
fi−1 ( f −1 (O)) = ( f ◦ fi )−1 (O) ⊆ Ti , i ∈ I ,
und wir erhalten f −1 (O) ⊆ T , d.h. f stetig.
❑
12.7.2 Bemerkung. Die Finale Topologie ist die einzige Topologie auf X, die (FI3 )
erfüllt. Um das einzusehen, sei T ′ eine weitere Topologie auf X mit der Eigenschaft
(FI3 ).
Da die Abbildung idX : (X, T ′ ) → (X, T ′ ) trivialerweise stetig ist, folgt aus (FI3 )
angewandt auf T ′ , dass alle idX ◦ fi : (Yi , Ti ) → (X, T ′ ) stetig sind. Aus (FI1 ) folgt
T′ ⊆ T.
Für idX : (X, T ′ ) → (X, T ) sind andererseits alle Abbildungen idX ◦ fi = fi :
(Yi , Ti ) → (X, T ) stetig. Mit (FI3 ) angewandt auf T ′ folgt die Stetigkeit von idX :
(X, T ′ ) → (X, T ), und daher T ⊆ T ′ . Insgesamt ist T ′ = T .
12.7.3 Bemerkung. Das Finale Topologie Bilden ist assoziativ; dh. es gilt ein Korollar
12.5.4 entsprechendes Resultat.
12.7.4 Beispiel. Sei (Y, T ) ein topologischer Raum und ∼ eine Äquivalenzrelation auf
Y. Weiters sei π : Y → Y/∼ die kanonische Projektion, π(x) = [x]∼ . Die finale Topologie auf Y/∼ bezüglich π heißt Quotiententopologie und wird bezeichnet als T /∼ .
Ist A ⊆ Y, so heißt A gesättigt bezüglich ∼, wenn x ∈ A die Inklusion [x]∼ ⊆ A nach
sich zieht. Offenbar sind alle Mengen der Bauart π−1 (B) mit B ⊆ Y/∼ gesättigt, und A
ist genau dann gesättigt, wenn π−1 (π(A)) = A. Somit stellt A 7→ π(A) eine bijektive
Abbildung von allen gesättigten Teilmengen von Y auf alle Teilmengen von Y/∼ dar,
wobei B 7→ π−1 (B) ihre Umkehrung ist.
Eine Menge P ⊆ Y/∼ ist per definitionem genau dann offen in (Y/∼ , T /∼ ), wenn
π−1 (P) offen in (Y, T ) ist. Insbesondere ist O 7→ π(O) eine Bijektion von allen gesättigten offenen Teilmengen von Y auf T /∼ . Entsprechendes gilt für abgeschlossene Mengen.
12.7.5 Proposition. Sei f : (X, T ) → (Y, V) eine stetige Abbildung. Bezeichne mit ∼
die Äquivalenzrelation x ∼ y : ⇐⇒ f (x) = f (y), und seien π : X → X/∼ , ι : f (X) → Y,
die kanonische Projektion bzw. Einbettung. Weiters sei g : X/∼ → f (X) die Bijektion
mit ι ◦ g ◦ π = f .
Dann ist g : (X/∼ , T /∼ ) → ( f (X), V| f (X) ) stetig. Außerdem sind folgende Aussagen
äquivalent
(i) g ist ein Homöomorphismus von (X/∼ , T /∼ ) auf ( f (X), V| f (X) ).
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
164
(ii) Für jede bezüglich ∼ gesättigte offene Menge O ⊆ X ist f (O) offen in
( f (X), V| f (X) ).
(iii) Für jede bezüglich ∼ gesättigte abgeschlossene Menge A ⊆ X ist f (A) abgeschlossen in ( f (X), V| f (X) ).
Beweis. Nach Satz 12.5.1,(IN3), bzw. Fakta 12.6.2 ist auch f : (X, T ) → ( f (X), V| f (X) )
stetig. Somit können wir oBdA. Y = f (X) und damit auch ι = idY annehmen.
Jede Abbildung g : X/∼ → Y mit g ◦ π = f muss g([x]∼ ) = f (x) für x ∈ X erfüllen.
Betrachten wir das als Definition, so ist die Wohldefiniertheit davon zu zeigen. Diese
folgt aber unmittelbar aus der Definition von von ∼, da [x]∼ = [y]∼ immer x ∼ y und
damit f (x) = f (y) nach sich zieht. Also gibt es ein solches g und dieses ist eindeutig.
Außerdem ist g injektiv, da aus f (x) = g([x]∼ ) = g([y]∼) = f (y) per definitionem x ∼ y
bzw. [x]∼ = [y]∼ folgt. Wegen g(X/∼ ) = f (X) = Y ist g sogar bijektiv.
Die Stetigkeit von g folgt unmittelbar aus Satz 12.7.1, (FI3 ), da X/∼ die finale
Topologie T /∼ bzgl. π trägt und da g ◦ π = f stetig ist.
Die Funktion g ist nun genau dann Homöomorphismus, wenn noch g−1 stetig ist,
d.h. wenn g(P) ∈ V für alle P ∈ T /∼ . Nach Beispiel 12.7.4 durchläuft π−1 (P) aber alle
offenen und gesättigten Teilmengen von X. Zudem gilt
g(P) = g ◦ π(π−1 (P)) = f (π−1 (P)) ,
woraus man sofort die Äquivalenz von (i) und (ii) erkennt. Die Äquivalenz von (i) und
(iii) zeigt man genauso.
❑
12.8 Zusammenhang und Trennungseigenschaft (T 1)*
Der Begriff der Getrenntheit zweier Teilmengen eines topologischen Raumes, welchen
wir jetzt einführen wollen, entspricht dem der Disjunktheit zweier Mengen aus der
Mengenlehre. Dabei gibt es eine schwächere und eine stärkere Version.
12.8.1 Definition. Sei (X, T ) ein topologischer Raum und seien A, B Teilmengen von
X. Dann heißen A und B getrennt, wenn A ∩ B = A ∩ B = ∅.
A und B heißen in (X, T ) getrennt durch offenen Mengen, wenn es disjunkte offene
Mengen OA , OB gibt, sodass A ⊆ OA , B ⊆ OB . Dazu sagen wir auch, dass sich A und
B durch offene Mengen trennen lassen.
12.8.2 Fakta.
1. Offenbar sind getrennte Mengen und auch durch offenen Mengen getrennte Mengen disjunkt.
c
c
2. A ∩ B = A ∩ B = ∅ ist äquivalent zu B ⊆ A und A ⊆ B , und daher auch
zur Existenz offener Mengen OA und OB , sodass B ⊆ OB , A ∩ OB = ∅ und
A ⊆ OA , B ∩ OA = ∅.
Insbesondere sind A und B sicher dann getrennt, wenn sie durch offene Mengen
getrennt sind. Die Umkehrung gilt im Allgemeinen nicht.
3. Für A, B ⊆ X und C := A ∪ B gilt für den Abschluss von A in C bzgl. der
T |C
Spurtopologie T |C bekannterweise A = A ∩ C = A ∪ (B ∩ A). Entsprechendes
gilt für B.
12.8. ZUSAMMENHANG UND TRENNUNGSEIGENSCHAFT (T 1)*
165
Insbesondere sind disjunkte Mengen A und B genau dann getrennt, wenn A und
B beide in A ∪ B bzgl. der Spurtopologie abgeschlossen sind. Durch Komplementbildung in A ∪ B erkennt man dann auch, dass disjunkte Mengen A und B
genau dann getrennt sind, wenn A und B beide in A ∪ B bzgl. der Spurtopologie
offen sind.
Somit sehen wir auch, dass A und B in C = A ∪ B (versehen mit T |C ) genau dann
getrennt sind, wenn sie dort durch offene Mengen getrennt sind.
4. Aus dem letzten Punkt erkennen wir auch, dass die Eigenschaft getrennt zu sein,
nur von der Spurtopologie auf A∪ B abhängt. Insbesondere gilt für A, B ⊆ Y ⊆ X,
dass A und B genau in (Y, T |Y ) getrennt sind, wenn sie es in (X, T ) sind.
Die Eigenschaft getrennt durch offene Mengen zu sein, hängt dagegen ganz wesentlich von dem betrachteten topologischen Raum ab.
Für eine weitere Charakterisierung der Eigenschaft durch offene Mengen zu sein,
siehe Bemerkung 12.9.2.
12.8.3 Definition. Ein topologischer Raum (X, T ) erfüllt das erste Trennungsaxiom
(T 1 ), wenn gilt:
(T 1 ) Je zwei verschiedene einpunktige Mengen lassen sich trennen.
Das schon bekannte Trennungsaxiom (T 2) bedeutet im Gegensatz dazu, dass sich
je zwei verschiedene einpunktige Mengen durch offene Mengen trennen lassen. (T 2)
ist somit stärker als (T 1).
12.8.4 Lemma. Ein topologischer Raum (X, T ) erfüllt genau dann (T 1 ), wenn einpunktige Mengen abgeschlossen sind.
Beweis. Sei x ∈ X. Nach Fakta 12.8.2, 2, gibt es zu y ∈ {x}c eine offene Umgebung
von y, die x nicht enthält, bzw. ganz in {x}c enthalten ist. Wegen Lemma 12.1.11 ist {x}c
offen.
Sind umgekehrt einpunktige Mengen abgeschlossen, so gilt für verschiedene
x, y ∈ X, dass auch {x} und {y} in {x, y} abgeschlossen sind. Gemäß Fakta 12.8.2, 3,
sind diese Mengen dann getrennt.
❑
Eins zu eins kann man den Begriff einer zusammenhängenden Menge auf topologische Räume verallgemeinern; vgl. Definition 6.2.2.
12.8.5 Definition. Eine Teilmenge E eines topologischen Raumes (X, T ) heißt zusammenhängend, wenn man E nicht als Vereinigung zweier nichtleerer getrennter Mengen
schreiben kann.
Aus Fakta 12.8.2, 4, erhalten wir
12.8.6 Lemma. Sei (X, T ) ein topologischer Raume und E ⊆ X. Die Eigenschaft,
zusammenhängend zu sein, hängt nur von der Spurtopologie auf E ab. Insbesondere
gilt für E ⊆ Y ⊆ X, dass E genau dann in (Y, T |Y ) zusammenhängend ist, wenn E es in
(X, T ) ist.
Das wichtige Resultat Proposition 6.2.4 lässt sich unmittelbar auf topologische
Räume übertragen, wobei man fast den selben Beweis nehmen kann. Man muss nur
Folgen durch Netze ersetzen. Wir wollen diesen Beweis aber etwas anders führen.
166
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
12.8.7 Proposition. Seien (X, T ) und (Y, O) topologische Räume, und sei f : X → Y
eine stetige Funktion. Ist E ⊆ X zusammenhängend, so auch f (E).
Beweis. Mit f : X → Y ist auch f |E : E → f (E) stetig, wobei E und f (E) jeweils mit
der Spurtopologie versehen sind. Wäre f (E) nicht zusammenhängend, so hätten wir
f (E) = A ∪ B mit in f (E) abgeschlossenen und disjunkten A, B , ∅. Daraus ergibt sich
aber im Widerspruch zur Voraussetzung
−1
E = f |−1
E (A) ∪ f |E (B) ,
−1
wobei f |−1
E (A), f |E (B) , ∅ in E abgeschlossenen und disjunkt sind.
❑
Folgender recht trivialer Sachverhalt ist jedoch sehr nützlich.
12.8.8 Lemma. Sei E eine zusammenhängende Teilmenge eines topologischen Raumes
(X, T ). Weiters seien A, B ⊆ X getrennt und so, dass E ⊆ A ∪ B. Dann folgt entweder
E ⊆ A oder E ⊆ B.
Beweis. Offensichtlich sind A ∩ E und B ∩ E als Teilmengen zweier getrennter
Mengen getrennt. Wegen E = (A ∩ E) ∪ (B ∩ E) und da E zusammenhängend ist, folgt
A ∩ E = ∅ oder B ∩ E = ∅ bzw. E ⊆ B oder E ⊆ A. Beides kann nicht der Fall sein, da
getrennte Mengen immer disjunkt sind.
❑
Damit können wir auch das im letzten Kapitel bewiesene Resultat Lemma 11.3.1
über die Vereinigung von zusammenhängenden Mengen in allgemeinen topologischen
Räumen mit einem etwas kürzeren Beweis versehen.
12.8.9 Korollar. Ist (Ei )i∈I eine Familie bestehend aus zusammenhängenden Teilmengen eines topologischen Raumes, sodass für ein gewisses i0 ∈ I und allen i ∈ I die
S
Mengen Ei0 und Ei nicht getrennt sind3 , so ist auch E := i∈I Ei zusammenhängend.
Beweis. Sei E = A ∪ B mit getrennten A und B. Nach Lemma 12.8.8 folgt für jedes
i ∈ I immer entweder Ei ⊆ A oder Ei ⊆ B. Sei oBdA. Ei0 ⊆ A. Wäre Ei ⊆ B für nur ein
i ∈ I, so wären Ei0 und Ei im Widerspruch zur Voraussetzung getrennt. Somit muss E
ganz in A enthalten sein; dh. B = ∅.
❑
12.8.10 Korollar. Mit E ist auch jede Teilmenge C eines topologischen Raumes mit
E ⊆ C ⊆ E zusammenhängend.
Beweis. Sei C = A ∪ B mit getrennten A und B. Nach Lemma 12.8.8 folgt E ⊆ A oder
E ⊆ B. Im ersten Fall folgt aus C ∩ B ⊆ E ∩ B ⊆ A ∩ B = ∅, dass E ⊆ A und daher
B = ∅. Im zweiten Fall schließt man entsprechend auf A = ∅.
❑
Das folgende Korollar 12.8.11 ist eine unmittelbare Verallgemeinerung von Lemma
11.3.5 auf allgemeine topologische Räume.
12.8.11 Korollar. Sei (X, T ) ein topologischer Raum. Ist ∼⊆ X × X die Relation auf X
definiert durch
x ∼ y ⇔ ∃E ⊆ X : x, y ∈ E, E ist zusammenhängend ,
3 Diese
Voraussetzung ist sicher dann erfüllt wenn Ei0 mit allen Ei einen nichtleeren Schnitt hat.
12.9. TRENNUNGSEIGENSCHAFTEN (T 3) UND (T 4)
167
so ist ∼ eine Äquivalenzrelation. Für ein x ∈ X ist die Äquivalenzklasse [x]∼ die größte
zusammenhängende Menge, die x enthält. Schließlich ist [x]∼ abgeschlossen.
Beweis. Da die einpunktige Menge {x} zusammenhängend ist, ist ∼ reflexiv. Die Symmetrie ist klar. Ist x ∼ y, y ∼ z, und sind E und F zusammenhängende Mengen, sodass
x, y ∈ E und y, z ∈ F, so ist nach Korollar 12.8.9 E ∪ F zusammenhängend, wobei
x, z ∈ E ∪ F. Also ist ∼ ein Äquivalenzrelation. Schließlich ist für x ∈ X die Menge
[
[x]∼ =
E,
x∈E
E ist zusammenhängend
wegen Korollar 12.8.9 zusammenhängend. Klarerweise ist diese Menge dann auch die
größte Zusammenhängende Menge, die x enthält. Wegen Korollar 12.8.10 ist sie auch
abgeschlossen.
❑
12.9 Trennungseigenschaften (T 3) und (T 4)
Wir wollen dieses Kapitel mit der einfachen Bemerkung starten, dass in (T 2 ) Räumen
einpunktige Mengen {x} abgeschlossen sind. Das folgt aus der Beobachtung, dass es zu
y ∈ {x}c wegen (T 2 ) eine Umgebung gibt, die x nicht enthält, bzw. ganz in {x}c enthalten
ist. Wegen Lemma 12.1.11 ist {x}c offen.
12.9.1 Definition. Man sagt, dass sich zwei disjunkte Mengen A und B in einem Topologischen Raum getrennt durch offenen Mengen sind, wenn es disjunkte offene Mengen
OA , OB gibt, sodass A ⊆ OA , B ⊆ OB . Dazu sagen wir auch, dass sich A und B durch
offene Mengen trennen lassen.
Ein topologischer Raum (X, T ) heißt regulär, falls er neben dem Axiom (T 2 ) noch
das Trennungsaxiom (T 3 ) erfüllt:
(T 3 ) Abgeschlossene Mengen A und einpunktige Mengen {x} mit x < A lassen sich
durch offene Mengen trennen, d.h. ∃O x , OA ∈ T : x ∈ O x , A ⊆ OA , O x ∩ OA = ∅.
OA
A
Ox
x
Abbildung 12.3: Drittes Trennungsaxiom (T 3 )
Ein topologischer Raum (X, T ) heißt normal, falls er neben dem Axiom (T 2 ) noch
das Trennungsaxiom (T 4 ) erfüllt:
(T 4 ) Disjunkte abgeschlossene Mengen A und B lassen sich durch offene Mengen
trennen, d.h. ∃OA , OB ∈ T : A ⊆ OA , B ⊆ OB , OA ∩ OB = ∅.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
168
OB
B
OA
A
Abbildung 12.4: Viertes Trennungsaxiom (T 4 )
Offenbar ist das Axiom (T 2) äquivalent dazu, dass sich je zwei verschiedene einpunktige Mengen durch offene Mengen trennen lassen.
Da einpunktige Mengen in (T 2)-Räumen abgeschlossen sind, folgt aus normal auch
regulär. Im Allgemeinen gilt aber nicht die Umkehrung.
12.9.2 Bemerkung. Zwei disjunkte Mengen A und B – die Disjunktheit ist äquivalent
zu A ⊆ Bc – lassen sich genau dann durch offene Mengen trennen, wenn es ein offenes
O gibt, sodass
A ⊆ O ⊆ O ⊆ Bc .
(12.18)
In der Tat folgt aus A ⊆ OA , B ⊆ OB , OA ∩ OB = ∅, dass A ⊆ OA ⊆ OcB ⊆ Bc und
daraus A ⊆ OA ⊆ OA ⊆ OcB ⊆ Bc .
c
c
Andererseits folgt aus (12.18) unmittelbar A ⊆ O, B ⊆ O , O ∩ O = ∅.
Zusammen mit Beispiel 12.1.10, (ii), folgt aus Bemerkung 12.9.2
12.9.3 Korollar. Das Axiom (T 3 ) ist äquivalent zur Tatsache, dass man zu dem Punkt
x und jedem offenen O ∋ x ein offenes P mit x ∈ P ⊆ P ⊆ O finden kann, bzw.
äquivalent zur Tatsache, dass man zu einer beliebigen Umgebung U ∈ U(x) eines
beliebigen Punktes x eine Umgebung V ∈ U(x) mit V ⊆ U finden kann.
12.9.4 Bemerkung. Im Gegensatz zu (T 4 ) vererben sich die Axiome (T 2 ) und (T 3 ) auf
Teilräume, d.h. ist Y ⊆ X und (X, T ) ein topologischer Raum, der (T 2 ) bzw. (T 3 ) erfüllt,
so erfüllt auch (Y, T |Y ) (T 2 ) bzw. (T 3 ).
Um das einzusehen, erfülle X zunächst das (T 2 ). Sind dann x , y ∈ Y und O x , Oy ∈
T disjunkt mit x ∈ O x bzw. y ∈ Oy , so folgt x ∈ O x ∩ Y ∈ T |Y , y ∈ Oy ∩ Y ∈ T |Y . Also
erfüllt Y auch das Axiom (T 2 ).
Gilt (T 3 ) auf X, und ist x ∈ Y und W eine Umgebung von x in Y, so haben wir in
Fakta 12.6.2 gesehen, dass dass W = U ∩ Y für eine Umgebung U von x in X. Wegen
(T 3 ) gibt es eine Umgebung V von x in X mit V ⊆ U und somit ist V ∩Y eine Umgebung
von x in Y mit
x∈V ∩Y
T |Y
T
= V ∩Y ∩Y ⊆ V ∩Y ⊆U ∩Y = W .
Also gilt (T 3 ) auch auf Y.
12.9.5 Bemerkung. Ähnlich zeigt man, dass sich die Axiome (T 2 ) und (T 3 ) von topoQ
Q
logischen Räumen (Xi , Ti ) auf den Produktraum ( i∈I Xi , i∈I Ti ) vererben.
12.10. DAS LEMMA VON URYSOHN*
169
12.9.6 Beispiel. Metrische Räume sind normal. Dazu seien A und B zwei disjunkte,
abgeschlossene Mengen.
Zu a ∈ A gibt es ein ǫa > 0 mit U2ǫa (a) ⊆ Bc . Entsprechend wählt man ǫb für b ∈ B.
Nun setze
[
[
OA :=
Uǫa (a), OB :=
Uǫb (b) .
a∈A
b∈B
Ist c ∈ OA ∩ OB , so gibt es a ∈ A, b ∈ B mit c ∈ Uǫa (a) ∩ Uǫb (b). O.B.d.A. sei ǫa ≥ ǫb .
Es folgt d(a, b) ≤ d(a, c) + d(c, b) < 2ǫa , was aber b ∈ U2ǫa (a) implizieren würde, im
Widerspruch zur Wahl von ǫa . Also gilt A ⊆ OA , B ⊆ OB , OA ∩ OB = ∅.
12.9.7 Bemerkung. Der Vollständigkeit halber sei hier noch das erste Trennungsaxiom
(T 1 ) erwähnt. Ein topologischer Raum erfüllt eben dieses erste Trennungsaxiom, wenn
es zu allen x , y immer zwei (nicht notwendigerweise disjunkte) offene Mengen O x
und Oy mit x ∈ O x und y ∈ Oy gibt, wobei x < Oy und y < O x . Man sieht unschwer,
dass (T 1 ) dazu äquivalent ist, dass alle einpunktigen Teilmengen abgeschlossen sind.
Offenbar folgt (T 1 ) aus dem (T 2 ), aber nicht umgekehrt.
12.10 Das Lemma von Urysohn*
S
12.10.1 Lemma. Sei Mk = { 2lk : l = 0, . . . , 2k } und M = ∞
k=0 Mk . Weiters sei (X, T )
ein topologischer Raum. Angenommen jedem r ∈ M ist eine offene Menge Or ∈ T
zugeordnet, sodass r, s ∈ M, r < s ⇒ Or ⊆ O s und O0 = ∅, O1 = X.
Ist dann f : X → [0, 1] definiert durch
so ist f stetig, wobei f auf
Eins annimmt.
T
f (x) = inf{r ∈ M : x ∈ Or },
r∈M,r>0
Or den Wert Null und auf X \
S
r∈M,r<1
Or den Wert
Beweis. Wegen O1 = X ist {r ∈ M : x ∈ Or } für jedes x ∈ X eine nichtleere Teilmenge
c
von [0, 1], wodurch f (x) ein Element von [0, 1] ist. Wegen O0 = ∅ ist {r ∈ M : x ∈ Or }
für jedes x ∈ X ebenfalls eine nichtleere Teilmenge von [0, 1], womit
c
g(x) := sup{r ∈ M : x ∈ Or }
auch in [0, 1] liegt.
c
Aus s ∈ {r ∈ M : x ∈ Or } und t ∈ {r ∈ M : x ∈ Or } folgt s < t, da s ≥ t die
c
c
Beziehung x ∈ O s ∩Ot ⊆ O s ∩O s = ∅ nach sich ziehen würde. Also folgt g(x) ≤ f (x).
Wäre aber g(x) < f (x), so folgt aus der Dichtheit von M in [0, 1], dass g(x) < r <
s < f (x) für zwei s, r ∈ M. Wegen Or ⊆ O s gilt für ein festes x ∈ X, dass x ∈ O s oder
c
x ∈ Ocs ⊆ Or , und damit f (x) ≤ s oder g(x) ≥ r. Das ist in jedem Fall ein Widerspruch;
also f (x) = g(x).
Die Stetigkeit von f : X → [0, 1] ist äquivalent zur Stetigkeit von f als Funktion
nach R hinein, vgl. Fakta 12.6.2. Wegen Lemma 12.4.7 reicht es dafür nachzuweisen,
dass alle Urbilder einer Subbasis der euklidischen Topologie auf R offen in X sind.
Da die Mengen der Bauart (t, +∞) und (−∞, t) für t ∈ R eine Subbasis der Topologie auf R sind, reicht es f −1 (t, +∞), f −1 (−∞, t) ∈ T für jedes t ∈ R zu zeigen. Dafür
zeigen wir für t ∈ R
[
[
c
Or (∈ T ),
f −1 (−∞, t) =
Or (∈ T ), und f −1 (t, +∞) =
r∈M,r<t
r∈M,r>t
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
170
womit wir die Stetigkeit nachgewiesen hätten. In der Tat ist
f (x) = inf{r ∈ M : x ∈ Or } < t ⇔ ∃r ∈ M, r < t, x ∈ Or ⇔ x ∈
[
Or .
r∈M,r<t
Außerdem gilt
c
c
f (x) = g(x) = sup{r ∈ M : x ∈ Or } > t ⇔ ∃r ∈ M, r < t, x ∈ Or ⇔ x ∈
[
c
Or .
r∈M,r>t
T
S
Schließlich folgt f ( r∈M,r>0 Or ) ⊆ {0} und f (X \ r∈M,r<1 Or ) ⊆ {1} unmittelbar aus
der Definition von f .
❑
Als Folgerung erhält man das in der Literatur als Lemma von Urysohn bezeichnete
Ergebnis.
12.10.2 Korollar. Erfüllt (X, T ) das vierte Trennungsaxiom (T 4) (siehe Definition
12.9.1), so sind je zwei disjunkte abgeschlossene Mengen A, B durch eine stetige Funktion f : X → [0, 1] trennbar, d.h. f (A) ⊆ {0}, f (B) ⊆ {1}.
Beweis. Sind A, B zwei abgeschlossene und disjunkte Teilmengen von X, so gibt es
wegen dem (T 4) zwei disjunkte offene Teilmengen O ⊇ A, P ⊇ B. Daraus folgt A ⊆
O ⊆ O ⊆ Pc ⊆ Bc .
Für k = 0 setzen wir O0 := O und O1 := Bc . Aus obiger Gleichung folgt Or ⊆ O s
für alle r < s, r, s ∈ M0 = {0, 1}.
Angenommen wir haben offene Or definiert, sodass Or ⊆ O s für alle r < s, r, s ∈
l
∈ Mk+1 \ Mk , d.h. l ∈ N \ 2N, l < 2k+1 , die Menge Ot
Mk , so definiere man für t = 2k+1
folgendermaßen:
l+1
Wegen r := 2l−1
k+1 , s := 2k+1 ∈ Mk folgt aus Or ⊆ O s , dass die abgeschlossenen
Mengen Or , Ocs disjunkt sind, und wie oben wegen dem (T 4) die Existenz einer offenen
Menge Ot , sodass Or ⊆ Ot ⊆ Ot ⊆ O s .
S
Also haben wir induktiv für alle r ∈ M = k∈N Mk offene Mengen definiert, sodass
Or ⊆ O s für alle r < s, r, s ∈ M. Definieren wir nun noch O0 und O1 um, indem
wir O0 := ∅ sowie O1 := X setzen, so sind alle Voraussetzungen von Lemma 12.10.1
erfüllt.
T
Wegen A ⊆ r∈M,r>0 Or erfüllt die stetige Funktion aus diesem Lemma f (A) ⊆ {0}
S
und wegen Or ⊆ Bc , r < 1, r ∈ M bzw. B ⊆ X \ r∈M,r<1 Or , auch f (B) ⊆ {1}.
❑
Als Folgerung des Lemmas von Urysohn erhalten wir den Fortsetzungssatz von
Tietze.
12.10.3 Satz (Fortsetzungssatz von Tietze). Ein topologischer Raum (X, T ) erfülle
(T 4 ). Ist A ⊆ X abgeschlossen und f : A → R stetig, so existiert eine stetige Fortsetzung g von f auf X, also ein stetiges g : X → R mit g|A = f , wobei
supt∈A | f (t)| = supt∈X |g(t)| (∈ R ∪ {+∞}).
Der Beweis beruht auf dem folgenden Lemma.
12.10.4 Lemma. Erfülle (X, T ) das Axiom T 4 und sei u : A → [−1, 1] stetig. Dann
existiert eine stetige Funktion v : X → [− 31 , 13 ], sodass |u(x) − v(x)| ≤ 32 , x ∈ A.
12.10. DAS LEMMA VON URYSOHN*
171
Beweis. Sei H := {x ∈ A : −1 ≤ u(x) ≤ − 13 } und K := {x ∈ A : 31 ≤ u(x) ≤ 1}. Dann
sind H, K abgeschlossen in A (bzgl. der Spurtopologie) und, da A abgeschlossen in X
ist, sind H, K auch abgeschlossen in X. Klarerweise gilt H ∩ K = ∅. Nach dem Lemma
von Urysohn, Korollar 12.10.2, gibt es eine stetige Funktion v : X → [− 31 , 31 ] mit
v(H) ⊆ {− 13 }, v(K) ⊆ { 13 }. Diese hat offensichtlich die gewünschte Eigenschaft.
❑
Beweis. (Satz 12.10.3)
Habe f zunächst Werte in [−1, 1]. Wir konstruieren eine Folge (hn )n∈N0 stetiger
Funktionen hn : X → [− 31 ( 32 )n , 13 ( 32 )n ].
Wendet man Lemma 12.10.4 auf die Funktion f an, so erhält man h0 : X →
[− 31 , 31 ] mit | f (x) − h0 (x)| ≤ 23 , x ∈ A.
Haben wir für j = 0, . . . , n stetige h j : X → [− 31 ( 23 ) j , 13 ( 32 ) j ], sodass
n
X
2
f (x) −
hn (x) ≤ ( )n+1 , x ∈ A ,
3
j=0
P
so wende man Lemma 12.10.4 auf u(x) := 32 n+1 f (x) − nj=0 hn (x) an. Die
resultierende Funktion wird mit 23 n+1 multipliziert, und wir erhalten eine Funktion hn+1 : X → [− 31 ( 23 )n+1 , 13 ( 23 )n+1 ], sodass
n+1
n
2 2 X
X
n+1
f (x) −
, x ∈ A.
hn (x) = f (x) −
hn (x) − hn+1 (x) ≤ ·
3
3
j=0
j=0
Wir werden in Lemma 12.14.9 sehen, dass der Raum Cb (X, R) aller reellwertigen, beschränkten und stetigen Funktionen auf X versehen mit k.k∞ ein Banachraum ist. Wegen
∞
∞
X
X
1 2 j
( ) =1
(12.19)
kh j k∞ ≤
3 3
j=0
j=0
P
konvergiert die Reihe ∞j=0 h j dort absolut; vgl. Definition 9.3.1. Gemäß Fakta
P
9.3.2 konvergiert somit ∞j=0 h j in Cb (X, R) bzgl. k.k∞ , dh. gleichmäßig, gegen
eine g ∈ Cb (X, R), wobei aus (12.19) die Abschätzung kgk∞ ≤ 1 folgt.
Schließlich ist g eine Fortsetzung von f , denn für x ∈ A gilt
n
X
2 n+1 n→∞
f (x) −
hn (x) ≤
−→ 0 .
3
j=0
Ist allgemeiner f : A → R beschränkt, dh. f : X → [−k f k∞ , k f k∞ ], so wenden
wir das gezeigte auf k f fk∞ an und erhalten nach Multiplikation der resultierenden
Funktion auf X mit k f k∞ die gewünschte Fortsetzung von f .
Sei nun f : A → R unbeschränkt. Da R homöomorph zu (−1, 1) vermöge eines
Homöomorphismus φ : R → (−1, 1) ist, können wir das bewiesene auf φ ◦ f :
A → (−1, 1) anwenden und erhalten eine Fortsetzung r : X → [−1, 1] davon.
Wegen A ⊆ r−1 (−1, 1) sind die abgeschlossenen Mengen A und r−1 {−1, 1}
disjunkt. Eine Anwendung von Korollar 12.10.2 ergibt eine stetige Funktion
s : X → [0, 1] mit s(A) ⊆ {1} und s(r−1 {−1, 1}) = {0}.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
172
Die ebenfalls stetige Funktion r · s : X → [−1, 1] nimmt nun offensichtlich die
Werte ±1 nicht an, dh. r · s : X → (−1, 1), und stimmt auf A mit φ ◦ f überein.
Die Funktion g : X → R definiert durch g = φ−1 ◦ (r · s) : X → R ist die gesuchte
Funktion.
❑
12.10.5 Bemerkung. Aus der Gültigkeit des Fortsetzungssatz von Tietze auf einem
topologischen Raum (X, T ) folgt sofort das Lemma von Urysohn, Korollar 12.10.2,
da für disjunkte und abgeschlossene Mengen A, B die Funktion f : A ∪ B → [−1, 1]
definiert durch f = 1B − 1A wegen Lemma 12.6.4 stetig ist, und daher eine stetige
Fortsetzung g : X → [−1, 1] hat. Die Funktion 21 (g + 1) hat dann die in Korollar
12.10.2 verlangten Eigenschaften.
Andererseits folgt aus der Gültigkeit des Lemma von Urysohn, Korollar 12.10.2,
auf einem topologischen Raum (X, T ), dass dieser das Axiom (T 4) erfüllt. Sind
nämlich A, B ⊆ X abgeschlossen und disjunkt und f : X → [0, 1] wie in Korollar
12.10.2, so folgt A ⊆ f −1 (−∞, 21 ), B ⊆ f −1 ( 21 , +∞), f −1 (−∞, 12 ) ∩ f −1 ( 21 , +∞) = ∅ und
f −1 (−∞, 12 ), f −1 ( 21 , +∞) ∈ T .
12.11 Kompaktheit
Bei metrischen Räumen haben wir den Begriff der Kompaktheit mit Hilfe von Folgen
eingeführt. Für allgemeine topologische Räume wollen wir anders starten. Wir werden
weiter unten sehen, dass dieser Zugang zur Kompaktheit bei metrischen Räumen mit
dem schon bekannten äquivalent ist.
12.11.1 Definition. Eine Teilmenge K eines topologischer Raum (X, T ) heißt kompakt,
wenn jede offene Überdeckung eine endliche Teilüberdeckung besitzt. D.h., ist V ⊆ T
eine Familie offener Mengen mit
[
V⊇K,
V∈V
so gibt es bereits endlich viele V1 , . . . , Vn mit
V1 ∪ . . . ∪ Vn ⊇ K .
Eine Teilmenge A ⊆ X heißt relativ kompakt, wenn A ⊆ X kompakt ist. Der Raum
(X, T ) heißt lokalkompakt, wenn jeder Punkt x eine kompakte Umgebung besitzt.
Sei C eine Familie von Teilmengen einer Mengen X, dh. C ⊆ P(X). Wir sagen, dass
C die endliche Durchschnittseigenschaft hat, wenn für je endlich viele C1 , . . . , Cn ∈ C
stets C1 ∩ . . . ∩ Cn , ∅ gilt.
12.11.2 Proposition. Sei (X, T ) ein topologischer Raum und K ⊆ X. Dann sind äquivalent:
(K1 ) K ist kompakt.
(K2 ) K betrachtet als Teilmenge von (K, T |K ) ist kompakt.
(K3 ) Jede Familie bzgl. T |K abgeschlossener Teilmengen von K mit der endlichen
Durchschnittseigenschaft hat nichtleeren Durchschnitt.
12.11. KOMPAKTHEIT
173
(K4 ) Jedes Netz (xi )i∈I in K hat ein gegen ein x ∈ K konvergentes Teilnetz.
Beweis.
(K1 ) ⇒ (K2 ): Sei V ⊆ T |K eine offene Überdeckung von K in (K, T |K ). Zu V ∈ V
existiert ein UV ∈ T mit UV ∩ K = V. Also ist U := {UV : V ∈ V} eine
Familie offener Mengen in X, die K überdeckt. Es gibt also UV1 , . . . , UVn mit
UV1 ∪ . . . ∪ UVn ⊇ K. Damit ist auch
V1 ∪ . . . ∪ Vn = (UV1 ∩ K) ∪ . . . ∪ (UVn ∩ K) = (UV1 ∪ . . . ∪ UVn ) ∩ K = K .
(K2 ) ⇒ (K1 ): Ist K als Teilmenge von (K, T |K ) kompakt, und ist U ⊆ T eine Überdeckung aus offenen Mengen in (X, T ), so ist
V := {U ∩ K : U ∈ U}
eine offene Überdeckung von (K, T |K ). Daher existiert eine endliche Teilüberdeckung {U1 ∩ K, . . . , Un ∩ K}, und daher U1 ∪ . . . ∪ Un ⊇ K.
(K2 ) ⇒ (K3 ): Sei C eine Familie in (K, T |K ) abgeschlossener Teilmengen von K mit
T
der endlichen Durchschnittseigenschaft. Angenommen C∈C C = ∅. Dann folgt
[
K \C = K ,
C∈C
wobei die K \ C in (K, T |K ) offen sind. Also gibt es eine endliche Teilüberdeckung, (K \ C1 ) ∪ . . . ∪ (K \ Cn ) = K, und wir erhalten C1 ∩ . . . ∩ Cn = ∅, was
aber der endlichen Durchschnittseigenschaft widerspricht.
(K3 ) ⇒ (K2 ): Sei V ⊆ T |K eine offene Überdeckung von K. Würde V keine endliche Teilüberdeckung besitzen, so wäre (K \ V1 ) ∩ . . . ∩ (K \ Vn ) , ∅ für jede
endliche Auswahl V1 , . . . , Vn ∈ V. Also hätte C = {K \ V : V ∈ V} die endliche Durchschnittseigenschaft, und nach Voraussetzung wäre der Schnitt aller
Mengen K \ V, V ∈ V nichtleer. Damit wäre V aber keine Überdeckung.
(K3 ) ⇒ (K4 ): Sei (xi )i∈I ein Netz in K. Für i ∈ I ist Ci = {xk : k i} ∩ K abgeschlossen
in (K, T |K ). Das System Ci , i ∈ I, hat die endliche Durchschnittseigenschaft,
denn sind i1 , . . . , in ∈ I und ist i ∈ I, i i1 , . . . , in , so gilt
∅ , {xk : k i} ⊆ {xk : k i1 } ∩ · · · ∩ {xk : k in } .
Nach Voraussetzung gibt es ein x ∈ ∩i∈I Ci .
Jetzt sei J = {( j, U) : j ∈ I, U ∈ U(x), x j ∈ U} versehen mit der offensichtlich
reflexiven und transitiven Relation
( j, U) (k, V) :⇔ j k ∧ U ⊇ V .
Für ( j1 , U1 ), ( j2 , U2 ) ∈ J sei k ∈ I mit k j1 , j2 . Wegen x ∈ {x j : j k} gibt es
ein x j ∈ U1 ∩ U2 mit j k, und somit ( j, U1 ∩ U2 ) ( j1 , U1 ), ( j2 , U2 ). Also ist
J gerichtet.
Mit xi( j,U) := x j erhalten wir ein Teilnetz (xi( j,U) )( j,U)∈J von (xi )i∈I , da für jedes
i0 ∈ I die Beziehung (i0 , X) ∈ J gilt und da ( j, U) (i0 , X) immer i( j, U) = j i0 = (i0 , U) nach sich zieht.
Zu V ∈ U(x) gibt es ein k ∈ I mit xk ∈ V. Für ( j, U) (k, V) folgt dann
xi( j,U) = x j ∈ U ⊆ V, und somit konvergiert dieses Teilnetz gegen x.
174
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
(K4 ) ⇒ (K3 ): Hat C = {Ci : i ∈ I} die endliche Durchschnittseigenschaft, so sei E(I)
die Menge aller endlichen Teilmengen von I gerichtet durch die Relation M1 M2 :⇔ M1 ⊆ M2 .
Für M ∈ E(I) sei x M irgend ein Punkt aus ∩i∈M Ci . Man beachte, dass nach
Voraussetzung dieser Schnitt nicht leer ist. Das Netz (x M ) M∈E(I) hat wegen (K4)
ein gegen ein x ∈ X konvergentes Teilnetz (x M( j) ) j∈J .
Ist k ∈ I, so gibt es wegen {k} ∈ E(I) ein j0 ∈ J mit M( j) ⊇ {k} für alle j j0 ,
und somit x M( j) ∈ ∩i∈M( j) Ci ⊆ Ck . Also liegt das ebenfalls gegen x konvergente
Netz (x M( j) ) j∈J j0 in der abgeschlossenen Menge Ck . Mit Proposition 12.2.7 folgt
daraus x ∈ Ck , und, da k ∈ I beliebig war, auch dass der Schnitt aller Ck ’s x
enthält und damit nicht leer ist.
❑
12.11.3 Bemerkung (*). Wegen Lemma 12.2.15 ist die Bedingung (K4) zu der Tatsache
äquivalent, dass jedes Netz einen Häufungspunkt in K hat.
12.11.4 Satz (*). Ein Netz (xi )i∈I in einer kompakten Menge K ⊆ X konvergiert genau
dann gegen ein x ∈ X, wenn x der einzige Häufungspunkt von (xi )i∈I ist.
Beweis. Wenden wir nun Lemma 12.2.16 an, und beachten, dass Häufungspunkte von
Teilnetzen von (xi )i∈I auch Häufungspunkte von (xi )i∈I sind (vgl. Lemma 12.2.15), so
erhalten wir aus Bemerkung 12.11.3 das behauptete Ergebnis.
❑
12.11.5 Definition (*). Eine Teilmenge A eines topologischen Raumes (X, T ) heißt
abzählbar kompakt, wenn jede unendliche Teilmenge von A einen Häufungspunkt in A
hat.
Eine Teilmenge A eines topologischer Raum (X, T ) heißt folgenkompakt, wenn jede
Folge in A eine gegen ein x ∈ A konvergente Teilfolge hat.
12.11.6 Bemerkung (*). Ist M ⊆ A unendlich, so gibt es sicher eine injektive Funktion
x : N → M. Das ist aber nichts anderes als eine Folge, daher x(n) = xn .
Ist A folgenkompakt, so folgt x = limk→∞ xn(k) für eine Teilfolge (xn(k) )k∈N und ein
x ∈ A. Für jede Umgebung U von x gibt es somit einen Index k0 ∈ N, sodass xn(k) ∈ U
für alle k ≥ k0 . Da die Folgenglieder alle verschieden sind, enthält U sicherlich einen
Punkt y := xn(k) ∈ M, der ungleich x ist. Also hat M einen Häufungspunkt in A; vgl.
Definition 12.2.8. Somit folgt für eine Teilmenge eines topologischen Raumes aus der
Eigenschaft folgenkompakt die Eigenschaft abzählbar kompakt. Die Umkehrung gilt
im Allgemeinen nicht.
Ist A kompakt, so folgt wegen Proposition 12.11.2 x = limi∈I xn(i) für ein Teilnetz
(xn(i) )i∈I und ein x ∈ A. Für jede Umgebung U von x gibt es somit einen Index i0 ∈ I,
sodass xn(i) ∈ U für alle i i0 .
Da die Folgenglieder alle verschieden sind, gibt es höchstens ein n0 ∈ N, sodass
xn0 = x. Die Teilnetzeigenschaft bedingt die Existenz eines i1 ∈ I, sodass i i1 ⇒
n(i) ≥ n0 + 1 ∧ xn(i) ∈ U. Für solche i liegt der Punkt y := xn(i) ∈ M in U und ist
ungleich x. Also hat M einen Häufungspunkt in A; vgl. Definition 12.2.8. Somit folgt
12.11. KOMPAKTHEIT
175
auch aus kompakt abzählbar kompakt. Die Umkehrung gilt im Allgemeinen auch hier
nicht.
Überraschenderweise gilt im Allgemeinen weder, dass kompakt folgenkompakt impliziert, noch, dass folgenkompakt kompakt impliziert. In metrischen Räumen sind alle
drei Begriffe äquivalent, siehe Satz 12.14.3.
12.11.7 Lemma. Sei (X, T ) ein topologischer Raum, A ⊆ X, sowie A1 , . . . , Am ⊆ X.
Es gilt:
(i) Sei A kompakt, B ⊆ A abgeschlossen in (A, T |A ). Dann ist B ⊆ X kompakt.
(ii) Sind A1 , . . . , Am kompakt, so auch A1 ∪ . . . ∪ Am .
Sei zusätzlich vorausgesetzt, dass (X, T ) Hausdorff ist. Dann gilt:
(iii) Ist A kompakt, so ist A abgeschlossen.
Beweis.
(i) Die Menge A \ B ist offen in (A, T |A ). Also existiert O ∈ T mit O ∩ A = A \ B. Sei
U eine Überdeckung von B aus in X offenen Mengen, dann überdeckt U ∪ {O}
ganz A. Daher gibt es U1 , . . . , Un ∈ U mit U1 ∪ . . . ∪ Un ∪ O ⊇ A. Es folgt
U1 ∪ · · · ∪ Un = U1 ∪ . . . ∪ Un ∪ (O ∩ B) ⊇
| {z }
=∅
⊇ (U1 ∩ B) ∪ . . . ∪ (Un ∩ B) ∪ (O ∩ B) = (U1 ∪ . . . ∪ Un ∪ O) ∩ B ⊇ B .
(ii) Sei U eine Überdeckung von A1 ∪ . . . ∪ Am aus in X offenen Mengen. Dann
überdeckt U jedes Ai , also existieren Uki , k = 1, . . . , ni , i = 1, . . . , m, mit
U1i ∪ . . . ∪ Uni i ⊇ Ai ,
und es folgt
[
k,i
Uki ⊇ A1 ∪ . . . ∪ Am .
(iii) Sei A kompakt, und sei x < A. Da (X, T ) Hausdorff ist, gibt es zu jedem Punkt
y ∈ A offene Umgebungen Uy ∈ U(y), Vy ∈ U(x), mit Uy ∩ Vy = ∅. Klarerweise
ist {Uy : y ∈ A} eine offene Überdeckung von A. Daher gibt es y1 , . . . , yn ∈ A,
sodass bereits Uy1 ∪ . . . ∪ Uyn ⊇ A gilt. Die Menge Vy1 ∩ . . . ∩ Vyn ist als endlicher
Durchschnitt von Umgebungen von x ebenfalls eine Umgebung von x, und es gilt
Uy1 ∪ . . . ∪ Uyn ∩ Vy1 ∩ . . . ∩ Vyn = ∅.
Also ist x ein innerer Punkt von Ac . Nach Lemma 12.1.11 ist Ac offen und daher
A abgeschlossen.
❑
12.11.8 Lemma. Sei f : (X, T ) → (Y, O) stetig. Ist A ⊆ X kompakt, so ist auch
f (A) ⊆ Y kompakt.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
176
Beweis. Ist U ⊆ O eine Überdeckung von f (A), so ist f −1 (U) eine Überdeckung von A,
die wegen der Stetigkeit von f aus offenen Mengen besteht. Es gibt also U1 , . . . , Un ∈
U, sodass
f −1 (U1 ) ∪ . . . ∪ f −1 (Un ) ⊇ A .
Wendet man darauf f an, so folgt U1 ∪ . . . ∪ Un ⊇ f (A).
❑
Nimmt man die Charakterisierung (K4) aus Proposition 12.11.2 her, so kann man
Lemma 12.11.8 auch ganz ähnlich wie in Proposition 6.1.13 beweisen. Ist nämlich
(yi )i∈I ein Netz in f (A), und wählt man zu jedem i ∈ I ein xi ∈ A, sodass f (xi ) = yi , so
hat nach (K4) das Netz (xi )i∈I ein gegen ein x ∈ A konvergentes Teilnetz (xi( j) ) j∈J . Aus
Lemma 12.3.3 schließen wir, dass (yi( j) ) j∈J = f (xi( j) ) j∈J gegen f (x) =: y konvergiert.
Also hat jedes Netz aus f (A) ein gegen ein y ∈ f (A) konvergentes Teilnetz. Nach (K4)
aus Proposition 12.11.2 ist f (A) somit kompakt.
12.11.9 Korollar. Es gilt:
(i) Sei (X, T ) kompakt und (Y, O) Hausdorff. Weiters sei f : (X, T ) → (Y, O) bijektiv
und stetig. Dann ist f ein Homöomorphismus.
(ii) Sei X eine Menge und T , O Topologien auf X, sodass T kompakt und O Hausdorff
ist, und sodass O ⊆ T . Dann gilt sogar O = T .
Beweis.
(i) Wir müssen nachweisen, dass f −1 stetig ist. Dazu zeigen wir, dass das Urbild
unter f −1 einer in (X, T ) abgeschlossenen Menge in (Y, O) abgeschlossen ist, siehe
Satz 12.3.5. Sei A ⊆ X abgeschlossen, dann ist A kompakt, und daher ist nach
Lemma 12.11.8 auch
( f −1 )−1 (A) = f (A) ⊆ Y
kompakt. Nach Lemma 12.11.7, (iii), ist ( f −1 )−1 (A) auch abgeschlossen.
(ii) Wegen O ⊆ T ist idX : (X, T ) → (X, O) stetig, und (i) zeigt, dass idX sogar ein
Homöomorphismus ist, d.h. T = O.
❑
12.11.10 Lemma. Sei (X, T ) ein topologischer Raum.
(i) Ist X Hausdorffsch, und ist A ⊆ X kompakt und x ∈ X \ A, so lassen sich x und
A durch offene Mengen trennen, d.h. es gibt disjunkte offene Mengen O x ∋ x und
OA ⊇ A.
(ii) Erfüllt X das Axiom (T 3 ), und sind A ⊆ X kompakt, B ⊆ X abgeschlossen und
A ∩ B = ∅, so lassen sich A und B durch offene Mengen trennen.
(iii) Ist (X, T ) kompakt und Hausdorffsch, so ist (X, T ) sogar normal.
Beweis.
12.12. FILTER UND NETZE*
177
(i) Zu jedem y ∈ A gibt es zwei disjunkte offene Mengen Qy ∋ y und Py ∋ x. Klarerweise ist dann {Qy : y ∈ A} eine Überdeckung von A. Wegen der Kompaktheit
gibt es y1 , . . . , yn ∈ A, sodass A ⊆ Qy1 ∪ · · · ∪ Qyn := OA . Außerdem ist mit
O x := Py1 ∩ · · · ∩ Pyn
O x ∩ OA = O x ∩ (Qy1 ∪ · · · ∪ Qyn ) ⊆ (Py1 ∩ Qy1 ) ∪ · · · ∪ (Pyn ∩ Qyn ) = ∅ .
(ii) Zu jedem y ∈ A gibt es wegen (T 3 ) zwei disjunkte offene Mengen Qy ∋ y und
Py ⊇ B. Dann ist {Qy : y ∈ A} eine Überdeckung von A. Wegen der Kompaktheit
gibt es y1 , . . . , yn ∈ A, sodass A ⊆ Qy1 ∪ · · · ∪ Qyn := OA . Außerdem gilt für
OB := Py1 ∩ · · · ∩ Pyn
OB ∩ (Qy1 ∪ · · · ∪ Qyn ) ⊆ (Py1 ∩ Qy1 ) ∪ · · · ∪ (Pyn ∩ Qyn ) = ∅ .
Also lassen sich A und B durch offene Mengen trennen.
(iii) Da jede abgeschlossene Teilmenge von X nach Lemma 12.11.7 kompakt ist, folgt
aus (i), dass X regulär ist, dh. es gilt (T 2 ) und (T 3 ). Nach (ii) ist X dann sogar
normal.
❑
12.12 Filter und Netze*
Wir wollen in diesem Abschnitt die Konvergenz von Filtern und Filterbasen behandeln.
Wir werden sehen, dass diesbezüglich ganz ähnliche Resultate gelten wie für Netze. In
der Tat kann man die Netzkonvergenz durch Konvergenz eines durch das Netz bestimmten Endfilters charakterisieren. Andererseits werden wir sehen, dass jeder Filter
als Endfilter eines Netzes beschrieben werden kann.
Zunächst wollen wir eine nützliche Schreibweise einführen. Ist B eine Filterbasis
auf einer Menge X, so bezeichne [B] den von B auf X gemäß (12.1) erzeugten Filter,
also
[B] = {F ∈ P(X) : ∃B ∈ B : B ⊆ F} .
12.12.1 Lemma. Seien X und Y nichtleere Mengen und f : X → Y eine Abbildung. Ist
B eine Filterbasis auf X, so ist f (B) eine Filterbasis auf Y. Dabei gilt
[ f (B)] = [ f ([B])] = {E ⊆ Y : f −1 (E) ∈ [B]}
Beweis. Aus ∅ < B , ∅ folgt sofort ∅ < f (B) , ∅. Zu f (B1 ), f (B2) ∈ f (B) mit
B1 , B2 ∈ B gibt es gemäß (FB2) ein B3 ∈ B, sodass B3 ⊆ B1 ∩ B2 , woraus sofort
f (B3 ) ⊆ f (B1 ∩ B2 ) ⊆ f (B1 ) ∩ f (B2 ) folgt. Also ist f (B) eine Filterbasis auf Y.
Offenbar gilt f (B) ⊆ f ([B]) und daher auch [ f (B)] ⊆ [ f ([B])]. E ∈ [ f ([B])]
bedeutet f (F) ⊆ E für ein F ∈ [B]. Also folgt B ⊆ F und somit f (B) ⊆ E bzw.
B ⊆ f −1 (E) für ein B ∈ B. Somit gilt f −1 (E) ∈ [B].
Schließlich folgt aus f −1 (E) ∈ [B], dass B ⊆ f −1 (E) und infolge
f (B) ⊆ f ( f −1 (E)) ⊆ E für ein B ∈ B. Also gilt E ∈ [ f (B)].
❑
Für Urbilder gilt folgende Aussage, die leicht zu verifizieren ist.
178
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
12.12.2 Lemma. Seien X und Y nichtleere Mengen und f : X → Y eine Abbildung. Ist
C eine Filterbasis auf Y. Falls f −1 (C) , ∅ (bzw. äquivalent dazu C ∩ f (X) , ∅) für alle
C ∈ C, so ist f −1 (C) eine Filterbasis auf X. Dabei gilt
[ f −1 (C)] = [ f −1 ([C])]
Sei X eine Menge. Betrachte die Menge aller Filter auf X. Dies ist eine gewisse
Teilmenge von P(P(X)), und da die Potenzmenge jeder Menge mit der mengentheoretischen Inklusion geordnet ist, ist auch die Menge aller Filter auf X in dieser Weise
eine geordnete Menge. Ist F1 ⊆ F2 , so sagt man, dass F2 feiner als F1 ist oder, dass F1
gröber als F2 ist.
12.12.3 Definition. Sei (X, T ) ein topologischer Raum und x ∈ X. Ein Filter F auf X
heißt konvergent gegen x, wenn F feiner ist als der Umgebungsfilter U(x) von x, dh.
F ⊇ U(x). Wir schreiben F → x dafür.
Eine Filterbasis B auf einem topologischen Raum (X, T ) heißt konvergent gegen
ein x ∈ X, in Zeichen B → x, wenn der von dieser Basis erzeugte Filter [B] gegen x
konvergiert.
Offenbar gilt für zwei Filter F1 , F2 auf (X, T ), dass
F1 → x, F1 ⊆ F2 ⇒ F2 → x .
Die Tatsache F → x ist wegen der Filtereigenschaft (F3) äquivalent zu
∀U ∈ U(x)∃F ∈ F : F ⊆ U .
(12.20)
Da B eine Filterbasis von [B] ist, ist B → x äquivalent zu
∀U ∈ U(x) ∃B ∈ B : B ⊆ U .
(12.21)
12.12.4 Bemerkung. Sind X und Y zwei topologische Räume, f : X → Y und x ∈ X,
so bedeutet die Stetigkeit von f bei x, dass es für jedes U ∈ U( f (x)) ein V ∈ U(x) mit
f (V) ⊆ U gibt. Das ist aber äquivalent dazu, dass der von f (U(x)) erzeugte Filter auf Y
feiner als U( f (x)) ist, dh. dass f (U(x)) → f (x).
In dem Fall gilt auch für jede gegen x konvergente Filterbasis B, dass [ f (B)] =
[ f ([B])] ⊇ [ f (U(x))] ⊇ U( f (x)), und somit f (B) → f (x).
Da auch U(x) eine gegen x konvergente Filterbasis ist, sehen wir, dass f bei x genau
dann stetig ist, wenn aus B → x immer f (B) → f (x) folgt.
Für das kommende sei daran erinnert, dass für ein Netz (xi )i∈I auf (X, T ) die Konvergenz (xi ) → x per definitionem gerade
∀U ∈ U(x) ∃i0 ∈ I : ∀i i0 : xi ∈ U
bedeutet. Die Ähnlichkeit zur Konvergenz einer Filterbasis lässt sich formalisieren.
12.12.5 Definition. Ist (I, ) eine gerichtete Menge, so setzen wir
BI := {{i : i k} : k ∈ I} .
Wegen {i : i j} ⊆ {i : i k} ∩ {i : i l} für ein j k, l ist BI eine Filterbasis auf
I; vgl. Bemerkung 12.1.8.
12.12. FILTER UND NETZE*
179
Ein Netz (xi )i∈I in einem topologischen Raum (X, T ) über der gerichteten Menge I
ist eine Abbildung x : I → X. Das Bild von BI unter x ist dann gerade die Filterbasis
(vgl. Lemma 12.12.1)
x(BI ) = {{xi : i k} : k ∈ I} .
[x(BI )] bezeichnet man auch als den Endfilter des Netzes (xi )i∈I .
Die Konvergenz von (xi )i∈I gegen ein x ∈ X besagt gerade
∀U ∈ U(x) : ∃k ∈ I : {xi : i k} ⊆ U ,
was aber genau x(BI ) → x bedeutet; vgl. Definition 12.12.3. Also
i∈I
xi −→ x ⇔ x(BI ) → x .
(12.22)
Implizit ist die Konstruktion des nun folgenden Lemma schon in Lemma 12.2.6
aufgetreten.
12.12.6 Lemma. Sei X ein nichtleere Menge und B eine Filterbasis auf X. Dann ist
I = {(y, B) ∈ X × B : y ∈ B}
mit der Relation (y1 , B1) (y2 , B2 ) :⇔ B1 ⊇ B2 eine gerichtete Menge. Für das Netz
(xi )i∈I definiert durch xi = y, wenn i = (y, B) gilt
x(BI ) = B .
Beweis. Die Richtungseigenschaft folgt aus der Filterbasiseigenschaft (FB2), denn für
(y1 , B1 ), (y2 , B2) ∈ I gilt (y3 , B3 ) (y1 , B1), (y2 , B2 ), wenn B ∋ B3 ⊆ B1 ∩ B2 und
y3 ∈ B3 . Reflexivität und Transitivität von sind klar. Schließlich gilt für k = (z, B) ∈ I
x({i ∈ I : i k}) = {xi : i k} = B ,
da (y, C) (z, B) ⇔ C ⊆ B und da {y : ∃C ∈ B, y ∈ C ⊆ B} = B.
❑
Aus Bemerkung 12.12.4 zusammen mit (12.22) und Lemma 12.12.6 können wir
unschwer die schon bekannte Tatsache herleiten, dass f : X → Y bei x genau dann
stetig ist, wenn für jedes Netz auf X aus xi → x immer f (xi ) → f (x) folgt.
12.12.7 Lemma. Sei X eine nichtleere Menge und ∅ , C ⊆ P(X). Dann gibt es genau
dann einen Filter, der C umfasst, wenn der Schnitt von endlich vielen Mengen aus C immer nichtleer ist. Das ist äquivalent dazu, dass das bzgl. ∩ abgeschlossene, nichtleere
Mengensystem
B = {C1 ∩ · · · ∩ Cn : n ∈ N, C1 , . . . , Cn ∈ C}
∅ nicht enthält, bzw. dass B eine Filterbasis ist.
In dem Fall ist [B] der gröbste Filter, der C enthält. Für [B] schreiben wir auch
[C].
Beweis. ⇒ folgt sofort aus der Filtereigenschaft (F2) des C enthaltenden Filters.
Umgekehrt bildet unter der Voraussetzung, dass der Schnitt von endlich vielen Mengen
aus C immer nichtleer ist, das Mengensystem B eine Filterbasis, vgl. Bemerkung
12.1.8. Offenbar gilt [B] ⊇ B ⊇ C. Da jeder Filter mit C auch B enthält, ist [B] der
gröbste C enthaltende Filter.
❑
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
180
12.12.8 Bemerkung. Wir wollen dieses Resultat verwenden um für einen topologischen
Raum (X, T ), x ∈ X, und D ⊆ X die Tatsache x ∈ D neu zu beleuchten. Bekannterweise
gilt
x ∈ D ⇔ ∀U ∈ U(x) : U ∩ D , ∅ .
Wegen Lemma 12.12.7 angewandt auf C = {D} ∪ U(x) ist das äquivalent dazu, dass
{U ∩ D : U ∈ U(x)} eine Filterbasis bestehend aus Teilmengen von D abgibt. Diese
konvergiert offenbar gegen x.
Ist andererseits B eine Filterbasis bestehend aus Teilmengen von D mit B → U(x),
so gibt es zu jedem U ∈ U(x) ein B ∈ B mit ∅ , B ⊆ U ∩ D. Somit gibt {U ∩ D : U ∈
U(x)} eine Filterbasis ab, was wieder x ∈ B bedeutet.
Also gilt x ∈ D genau dann, wenn B → x für eine gewisse Filterbasis bestehend
aus Teilmengen von D. Mit Hilfe von (12.22) und Lemma 12.12.6 kann man wieder
leicht die schon bekannte Tatsache herleiten, dass das auch zur Existenz eines Netzes
aus D mit Grenzwert x äquivalent ist.
12.12.9 Korollar. Ist B j , j ∈ J, eine Familie von Filtern auf X, sodass endlich viele
S
Mengen aus C := j∈J B j immer einen nichtleeren Schnitt haben, so gibt es einen
gröbsten Filter [C], der alle B j , j ∈ J, umfasst. Dabei gilt
h[
i
[C] =
[B j ] .
(12.23)
j∈J
Man schreibt auch
W
j∈J [B j ]
für diesen Filter.
Beweis. Die erste Aussage folgt sofort aus Lemma 12.12.7. Außerdem gilt [C] ⊇ [B j ]
S
S
für jedes j ∈ J, und damit ⊇ in (12.23). ⊆ folgt sofort aus j∈J B j ⊆ j∈J [B j ].
❑
12.12.10 Lemma. Seien X eine Menge, (Yi , Ti ), i ∈ I, topologische Räume und fi :
X → Yi , i ∈ I, Abbildungen, und sei X versehen mit der entsprechenden initialen Topologie T . Eine Filterbasis B auf X konvergiert genau dann gegen ein x ∈ X, wenn
fi (B) → fi (x) für alle i ∈ I.
S
−1
U fi (x) . Man beachte dabei, dass
Beweis. Für x ∈ X betrachte C :=
i∈I fi
[ fi−1 U fi (x) ] = [ fi−1 W fi (x) ], wenn W fi (x) eine Filterbasis von U fi (x) ist; vgl.
Lemma 12.12.2. Nach Korollar 12.12.9 gilt
h[
i
[C] =
fi−1 W fi (x) .
j∈J
Sei W fi (x) die Filterbasis aller fi (x) enthaltenden offenen Teilmengen von Yi .
T
Die Mengen der Bauart i∈J fi−1 (Oi ), wobei J ⊆ I endlich ist und Oi ∈ Ti , i ∈ J,
bilden eine Basis der Topologie T . Für x ∈ X ist die Menge aller solchen Mengen,
die x enthalten, ein Basis des Umgebungsfilter von x bzgl. T . Nun
genau
ist dasaber
S
die die Menge aller endlichen Schnitte von Mengen aus j∈J fi−1 W fi (x) . Also gilt
[C] = U(x).
fi (B) → fi (x) bedeutet [ fi (B)] ⊇ U( fi (x)) für alle i ∈ I. Nach Lemma 12.12.1 ist
das zu fi−1 (U( fi (x))) ⊆ [B], i ∈ I, äquivalent. Da die rechte Seite ein Filter ist, erkennt
man, dass das zu [C] ⊆ [B], dh. zu B → x, äquivalent ist.
❑
In Analogie zum Häufungspunkt eines Netzes definieren wir
12.12. FILTER UND NETZE*
181
12.12.11 Definition. Sei (X, T ) ein topologischer Raum und B eine Filterbasis in X.
Dann heißt x ∈ X Häufungspunkt von B, falls
\
B =: HP(B) .
x∈
B∈B
12.12.12 Fakta.
1. Offenbar gilt HP(B) = HP([B]) und B1 ⊆ B2 ⇒ HP(B1 ) ⊇ HP(B2 ).
2. Aus Bemerkung 12.12.8 erkennen wir, dass x ∈ HP(B) äquivalent ist zu U ∩ B ,
∅ für alle U ∈ U(x) und B ∈ B.
3. Daraus leitet man unmittelbar her, dass aus B → x, dh. B ⊇ U(x), immer x ∈
HP(B) folgt.
4. Gemäß 2 und Lemma 12.12.7 bedeutet x ∈ HP(B), dass der Filter [U(x) ∪ B]
existiert, wobei [U(x) ∪ B] ⊇ U(x). Also gibt es einen feineren Filter als [B], der
gegen x strebt.
Diese Tatsache ist sogar äquivalent zu x ∈ HP(B), denn ist umgekehrt F ein
Filter mit F → x und F ⊇ [B], so folgt x ∈ HP(F) ⊆ HP(B).
12.12.13 Lemma. Eine Filterbasis auf einem topologischen Raum (X, T ) konvergiert
genau dann gegen x ∈ X, wenn x ∈ HP(C) für jede Filterbasis C mit [C] ⊇ [B].
Beweis. Aus [B] → x, dh. [B] ⊇ U(x), und [C] ⊇ [B] folgt sofort [B] → x und daher
x ∈ HP(C).
[B] 6→ x bedeutet andererseits [B] + U(x), dh. U < [B] für ein U ∈ U(x). Es
folgt B \ U , ∅ für alle B ∈ B, da ja aus B ⊆ U immer U ∈ [B] folgt. Somit ist
C := {B \ U : B ∈ B} eine Filterbasis mit [C] ⊇ [B]. x kann aber wegen Fakta 12.12.12,
2, kein Häufungspunkt von C sein.
❑
Vergleichen wir Fakta 12.12.12, 4, mit Lemma 12.2.15, so stellt sich die Frage, was
Teilnetze mit feineren Filtern zu tun haben.
12.12.14 Bemerkung. Sei (xi )i∈I ein Netz in einem topologischen Raum (X, T ). Aus
(12.5) erkennt man sofort, dass x genau dann Häufungspunkt von (xi )i∈I ist, wenn x
Häufungspunkt der Filterbasis x(BI ) ist.
Sei nun (xi( j) ) j∈J ein Teilnetz von (xi )i∈I , dh. für jedes i0 ∈ I gibt es ein j0 ∈ J
mit {i( j) : j j0 } ⊆ {i : i i0 }. Wir sehen, dass die Teilnetzeigenschaft zu [BI ] ⊆
[i(B J )] = i[[B J ]] äquivalent ist. Man beachte, dass damit die Eigenschaft Teilnetz zu
sein, nicht von den Netzen, sondern nur von den betrachteten gerichteten Mengen und
der Abbildung i : J → I abhängt.
Aus [BI ] ⊆ [i(B J )] folgt (vgl. Lemma 12.12.1)
[x(BI )] = x[BI ] ⊆ x[i(B J )] = [x(i(B J ))] = [x ◦ i(B J )]
Insbesondere erkennt man, dass aus (xi )i∈I → x auch (xi( j) ) j∈J → x folgt.
Ist nun C eine Filterbasis auf X mit [C] ⊇ [x(BI )], so kann man andererseits ein
Teilnetz (xi( j) ) j∈J von (xi )i∈I konstruieren, sodass [C] = [x ◦ i(B J )]4 . Dazu setzen wir
J := {(k, C) : k ∈ I, C ∈ C, xk ∈ C} ,
4 Diese
Konstruktion tritt implizit schon im Beweis von Proposition 12.11.2 auf.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
182
und definieren
(k1 , C1 ) (k2 , C2 ) :⇔ k1 k2 ∧ C1 ⊇ C2 .
ist offenbar reflexiv und transitiv. Für (k1 , C1 ), (k2 , C2 ) ∈ J gibt es C3 ∈ C mit C3 ⊆
C1 ∩ C2 und k ∈ I mit k k1 , k2 . Aus [C] ⊇ [x(BI )] folgt C3 ∩ {xi : i k} ∈ [C]. Also
ist dieser Schnitt nicht leer, und wir finden k3 k mit xk3 ∈ C3 , dh. (k1 , C1 ), (k2 , C2 ) (k3 , C3 ) ∈ J. Also ist J eine gerichtete Menge.
Setzen wir noch i (k, C) = k, so ist (xi( j) ) j∈J nach der Definition von auf J ein
Teilnetz. Für den entsprechenden Endfilter gilt ( j0 = (k0 , C0 ))
{xi( j) : j j0 } = {xk : k0 k ∈ I, ∃C ∈ C, xk ∈ C ⊆ C0 } = C0 ∩ {xk : k k0 } .
Wegen [C] ⊇ [x(BI )] gilt schließlich [C] = [x ◦ i(B J )].
12.13 Satz von Tychonoff*
12.13.1 Proposition. Einen topologischer Raum (X, T ) ist genau dann kompakt, wenn
jede Filterbasis einen Häufungspunkt hat.
Beweis. Ist B eine Filterbasis auf einem kompakten X, so hat B und daher auch
{B : B ∈ B}
die endliche Durchschnittseigenschaft. Aus Proposition 12.11.2 folgt HP(B) =
T
B∈B B , ∅.
Hat C ⊆ P(X) bestehend aus abgeschlossenen Mengen die endliche Durchschnittseigenschaft, so existiert nach Lemma 12.12.7 ein gröbster, C enthaltender Filter [C].
Falls jede Filterbasis einen Häufungspunkt hat, folgt
\
\
C , ∅.
C⊇
C∈C
C∈[C]
Nach Proposition 12.11.2 ist X kompakt.
❑
12.13.2 Definition. Ein Filter F auf einer Menge X , ∅ heißt Ultrafilter, wenn er ein
maximales Element in der Menge aller Filter auf X, geordnet mit der mengentheoretischen Inklusion, ist, dh. wenn aus G ⊇ F für einen Filter G immer G = F folgt.
12.13.3 Proposition. Sei X eine Menge, und F ein Filter auf X. Dann existiert ein
Ultrafilter F1 mit F1 ⊇ F.
Beweis. Wir wollen das Lemma von Zorn (siehe Satz 13.0.7) anwenden, und zwar
auf die Menge aller Filter auf X, die feiner als F sind. Diese Menge ist nichtleer –
sie enthält sicher F, und sie ist als Teilmenge der Menge aller Filter bezüglich der
mengentheoretischen Inklusion geordnet.
Sei (Fi )i∈I , I , ∅ eine totalgeordnete Menge von Filtern Fi mit Fi ⊇ F. Definiere
S
G := i∈I Fi . Dann gilt G ⊇ F, denn I , ∅ und alle Fi enthalten F. Insbesondere ist G
nichtleer.
Zu F1 , F2 ∈ G existiert i1 , i2 ∈ I mit F1 ∈ Fi1 und F2 ∈ Fi2 . Nun gilt entweder Fi1 ⊆
Fi2 oder Fi2 ⊆ Fi1 . Im ersten Fall sind F1 , F2 beide Elemente des Filters Fi2 , und daher
ist auch F1 ∩ F2 ∈ Fi2 ⊆ G. Im zweiten Fall erhält man genauso F1 ∩ F2 ∈ Fi1 ⊆ G. Ist
12.13. SATZ VON TYCHONOFF*
183
schließlich F1 ∈ G und F2 ⊇ F1 , so gilt für i ∈ I mit F1 ∈ Fi , sicherlich F2 ∈ Fi ⊆ G.
Also ist G ein Filter.
Nach dem Lemma von Zorn existiert in der Menge aller Filter auf X, die feiner
als F sind, ein maximales Element. Es verbleibt zu bemerken, dass ein maximales
Element in der Menge aller Filter auf X, die feiner als F sind, auch maximal in der
Menge aller Filter ist.
❑
12.13.4 Lemma. Seien X und Y nichtleere Mengen und f : X → Y eine Abbildung. Ist
F eine maximaler Filter, so ist es auch [ f (F)].
Beweis. Gemäß Lemma 12.12.1 ist [ f (F)] = {E ⊆ Y : f −1 (E) ∈ F} ein Filter.
Ist [ f (F)] ⊆ G für einen Filter G auf Y, so folgt f (F) ∩ G , ∅ und damit auch
F ∩ f −1 (G) , ∅ für alle F ∈ F, G ∈ G. Also ist die Menge {F ∩ f −1 (G) : F ∈ F, G ∈ G}
die Filterbasis eines Filters, der offenbar F und f −1 (G) umfasst. Wegen der Maximalität muss dieser mit F übereinstimmen. Somit gilt f −1 (G) ⊆ F bzw. G ⊆ [ f (F)].
❑
12.13.5 Korollar. Ein topologischer Raum (X, T ) ist genau dann kompakt, wenn jeder
Ultrafilter auf X konvergiert.
Beweis. Ist X kompakt und F ein Ultrafilter, so hat dieser nach Proposition 12.13.1
einen Häufungspunkt x ∈ X. Gemäß Fakta 12.12.12, 4, gibt es einen feineren, gegen x
konvergenten Filter. Wegen der Maximalität muss dieser aber mit F übereinstimmen.
Konvergiere umgekehrt jeder Ultrafilter. Ist B eine beliebige Filterbasis, so gibt es
nach Proposition 12.13.3 einen Ultrafilter F ⊇ [B]. Da F einen Grenzwert hat, muss er
auch einen Häufungspunkt haben. Somit hat aber auch B einen Häufungspunkt; vgl.
Fakta 12.12.12. Die Kompaktheit folgt aus Proposition 12.13.1.
❑
12.13.6 Satz (Tychonoff). Sei (Xi , Ti ), i ∈ I, eine Familie topologischer Räume, und
Q
Q
Q
Q
sei i∈I Ti die Produkttopologie auf i∈I Xi . Dann ist ( i∈I Xi , i∈I Ti ) genau dann
kompakt, wenn alle Räume (Xi , Ti ), i ∈ I, kompakt sind.
Beweis. Wir setzten
X :=
Y
i∈I
Xi und T :=
Y
i∈I
Ti ,
und bezeichnen mit πi : X → Xi die Projektion auf die i-te Komponente. Bekannterweise sind die πi : (X, T ) → (Xi , Ti ) stetig.
Setzt man voraus, dass (X, T ) kompakt ist, so ist jeder Raum (Xi , Ti ) als stetiges
Bild eines kompakten Raumes ebenfalls kompakt, vgl. Lemma 12.11.8.
Sei nun vorausgesetzt, dass (Xi , Ti ) für jedes i ∈ I kompakt ist, und sei F ein
Ultrafilter auf X. Für jedes i ∈ I folgt aus Lemma 12.13.4, dass [πi (F)] ein Ultrafilter
auf Xi ist. Nach Korollar 12.13.5 konvergiert [πi (F)] gegen einen Punkt xi ∈ Xi . Setzen
wir x := (xi )i∈I (∈ X), so folgt aus Lemma 12.12.10, dass F gegen x konvergiert. Nach
Korollar 12.13.5 ist X damit kompakt.
❑
Die folgende Aussage ist oft praktisch wenn man mit Ultrafiltern arbeitet.
12.13.7 Lemma. Ein Filter F in X ist genau dann Ultrafilter, wenn für alle A ⊆ X
entweder A ∈ F oder Ac ∈ F gilt.
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
184
Beweis. Habe F die angegebene Eigenschaft, und sei G ⊇ F. Für F ∈ G gilt also
entweder F ∈ F oder F c ∈ F. Im zweiten Fall wäre dann aber F c ∈ G, womit wir den
Widerspruch ∅ = F ∩ F c ∈ G erhielten. Also muss stets der erste Fall eintreten, womit
G ⊆ F. Also ist F ein Ultrafilter.
Sei F ein Ultrafilter, A ⊆ X, und sei Ac < F. Dann gilt A ∩ B , ∅ für jedes
B ∈ F, denn wäre A ∩ B = ∅, also B ⊆ Ac , so müssten wir Ac ∈ F haben. Also ist die
Menge B := {A ∩ B : B ∈ F} eine Filterbasis. Offenbar gilt [B] ⊇ F, und wegen der
Maximalität von F sogar [B] = F. Wegen A ∈ B erkennen wir, dass F die angegebene
Bedingung erfüllt.
❑
12.14 Kompaktheit in metrischen Räumen
In diesem Abschnitt wollen wir uns speziell kompakte metrische Räume anschauen.
Im ersten Semester haben wir die Kompaktheit einer Teilmenge K eines metrischen
Raumes (X, d) so definiert, dass jede Folge eine gegen einen Punkt aus K konvergente
Teilfolge hat.
Wir werden hier unter anderem sehen, dass die Definition aus dem ersten Semester
mit der aus Definition 12.11.1 übereinstimmt. Außerdem werden wir die Kompaktheit
auch mit Hilfe des folgenden Begriffes charakterisieren.
12.14.1 Definition. Sei (X, d) ein metrischer Raum und sei M ⊆ X. Die Menge M heißt
total beschränkt, wenn es zu jedem ǫ > 0 endlich viele Teilmengen M1 , . . . , Mn ⊆ M
vom Durchmesser d(M j ) := supx,y∈M j d(x, y) kleiner als ǫ gibt, sodass
M = M1 ∪ · · · ∪ Mn .
12.14.2 Fakta.
1. Man sieht sofort, dass Teilmengen von total beschränkten Mengen wieder total
beschränkt sind.
2. Da einerseits Kugeln mit Radius ǫ einen Durchmesser kleiner oder gleich 2ǫ
haben und da andererseits jede Teilmenge M j ⊆ M mit d(M j ) < ǫ für ein beliebiges η j ∈ M j in Uǫ (η j ) enthalten ist, lässt sich totale Beschränktheit auch
folgendermaßen charakterisieren:
Zu jedem ǫ > 0 gibt es y1 , . . . , yn ∈ M, sodass M ⊆ Uǫ (y1 ) ∪ · · · ∪ Uǫ (yn ).
3. Ist M j ⊆ X und sind x, y ∈ M j , so gibt es wegen Lemma 5.1.13 gegen x
bzw. y konvergente Folgen (xn )n∈N und (yn )n∈N aus M j . Somit folgt d(x, y) =
limn→∞ d(xn , yn ) ≤ d(M j ), und daher d(M j ) = d(M j ).
Ist M total beschränkt und ǫ > 0, so gilt M = M1 ∪ · · · ∪ Mn mit d(M j ) < ǫ, j =
1, . . . , n. Es folgt nunmehr M = M1 ∪ · · · ∪ Mn mit d(M j ) < ǫ, j = 1, . . . , n,
womit auch M total beschränkt ist.
Ist M schon selbst abgeschlossen, so erkennt man daraus, dass man die Mengen
M j auch abgeschlossen wählen kann.
12.14.3 Satz. Sei K eine Teilmenge eines metrischen Raumes (X, d). Dann sind äquivalent:
12.14. KOMPAKTHEIT IN METRISCHEN RÄUMEN
185
(i) K ist kompakt im Sinne von Definition 12.11.1.
(ii) Jede unendliche Teilmenge von K hat einen Häufungspunkt in K.
(iii) Jede Folge in K hat eine gegen einen Punkt in K konvergente Teilfolge.
(iv) K ist total beschränkt und (K, d|K×K ) ist ein vollständiger metrischer Raum.
Beweis.
(i) ⇒ (ii): Sei M ⊆ K unendlich. Hätte M keinen Häufungspunkt in K, so gibt es zu
jedem y ∈ K ein ǫ(y) > 0, sodass (vgl. Definition 5.1.8)
M ∩ Uǫ(y) (y) ⊆ {y} .
Da y ∈ K beliebig war, ist {Uǫ(y) (y) : y ∈ K} eine offene Überdeckung von
K, die voraussetzungsgemäß eine endliche Teilüberdeckung hat. Also gibt es
y1 , . . . , yk ∈ K, sodass K ⊆ Uǫ(y1 ) (y1 ) ∪ · · · ∪ Uǫ(yk ) (yk ). Somit erhalten wir
M = M ∩ K ⊆ M ∩ Uǫ(y1 ) (y1 ) ∪ · · · ∪ Uǫ(yk ) (yk ) ⊆ {y1 , . . . , yn } ,
womit M aber endlich wäre.
(ii) ⇒ (iii): Habe jede unendliche Teilmenge von K einen Häufungspunkt in K, und
sei (xn )n∈N eine Folge aus K. Ist {xn : n ∈ N} endlich, so gilt sicherlich xn = x
für ein x ∈ K und für unendlich viele n ∈ N. Somit hat (xn )n∈N eine Teilfolge, die
konstant gleich x ist. Also ist x ein Häufungspunkt unserer Folge.
Anderenfalls ist {xn : n ∈ N} ⊆ K unendlich, und laut Voraussetzung hat sie
einen Häufungspunkt x in K. Da jede ǫ-Kugel um x unendlich viele Punkte aus
{xn : n ∈ N} enthält (vgl. Fakta 5.1.11), muss für N ∈ N jede ǫ-Kugel auch
unendlich viele Punkte aus {xn : n ∈ N, n ≥ N} enthalten. Insbesondere gilt
x ∈ {xn : n ∈ N, n ≥ N}. Nach Lemma 5.2.2 ist x Häufungspunkt von (xn )n∈N .
(iii) ⇒ (iv): Angenommen K wäre nicht total beschränkt. Dann gibt es ein ǫ > 0, sodass, wenn immer M1 , . . . , Mn endlich viele Teilmengen von K sind mit Durchmesser < ǫ, niemals M1 ∪ · · · ∪ Mn = K ist. Aus dieser Tatsache werden wir nun
auf die Existenz einer Folge ohne Häufungspunkt schließen.
Sei x1 ∈ K beliebig. Angenommen wir haben x1 , . . . , xk ∈ K definiert, dann
hat für j ∈ {1, . . . , k} nach der Dreiecksungleichung die Kugel U 3ǫ (x j ) einen
Durchmesser ≤ 2ǫ3 . Wegen unserer Wahl von ǫ ist (U 3ǫ (x1 ) ∪ · · · ∪ U 3ǫ (xk )) ∩ K
eine echte Teilmenge von K. Wir wählen
xk+1 ∈ K \ U 3ǫ (x1 ) ∪ · · · ∪ U 3ǫ (xk ) .
Diese induktiv definierte Folge (xk )k∈N hat offensichtlich die Eigenschaft, dass
für k ∈ N der Punkt xk nicht in U 3ǫ (x1 )∪· · ·∪U 3ǫ (xk−1 ) liegt, und somit d(xk , xl ) ≥
ǫ
3 für l < k.
Damit kann keine Teilfolge von (xk )k∈N eine Cauchy-Folge sein und schon gar
nicht konvergieren. Das widerspricht aber der Voraussetzung (iii).
Es bleibt die Vollständigkeit von (K, d|K×K ) zu zeigen. Dazu sei (xk )k∈N eine
Cauchy-Folge in K. Diese hat voraussetzungsgemäß eine konvergente Teilfolge. Gemäß Lemma 3.5.7 ist (xk )k∈N konvergent.
186
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
(iv) ⇒ (i): Zunächst folgt wegen Lemma 9.1.6 aus der Vollständigkeit, dass K abgeschlossen ist. Sei nun U eine offene Überdeckung von K, und sei angenommen,
dass U keine endliche Teilüberdeckung enthält.
Die Menge K ist gleich der Vereinigung von endlich vielen abgeschlossenen
Mengen mit Durchmesser kleiner als 1. Mindestens eine von diesen Mengen
kann nicht durch endlich viele Mengen aus U überdeckt werden. Diese sei K1 .
Die Menge K1 ist gleich der Vereinigung von endlich vielen abgeschlossenen
Mengen mit Durchmesser kleiner als 12 . Mindestens eine von diesen kann nicht
durch endlich viele Mengen aus U überdeckt werden. Diese sei K2 . Verfährt man
induktiv weiter, so erhält man eine Folge
K ⊇ K1 ⊇ K2 ⊇ K3 ⊇ . . .
von abgeschlossenen Mengen, sodass Kn einen Durchmesser kleiner als
und kein Kn durch endlich viele Mengen aus U überdeckt werden kann.
1
n
hat,
Wähle xn ∈ Kn . Dann ist (xn )n∈N eine Cauchy-Folge. Sei x ∈ K, sodass xn → x.
Also existiert V ∈ U mit x ∈ V. Da V offen ist, gibt es eine Kugel Uǫ (x) ⊆ V.
Sei n ∈ N, sodass 1n < 2ǫ und d(xn , x) < 2ǫ . Da der Durchmesser von Kn kleiner
als n1 ist, folgt für y ∈ Kn :
d(x, y) ≤ d(x, xn ) + d(xn , y) < ǫ .
Also ist Kn ⊆ V, im Widerspruch zur Tatsache, dass Kn nicht durch endlich viele
Mengen aus U überdeckt werden kann.
❑
12.14.4 Bemerkung. Eine Situation, wo obiger Satz Anwendung findet, ist die, dass
(X, d) ein vollständig metrischer Raum ist, und dass G eine total beschränkte Teilmenge
von X ist. Der Abschluss K von G ist dann auch total beschränkt und vollständig, also
kompakt.
12.14.5 Bemerkung (*). Satz 12.14.3 besagt insbesondere, dass in metrischen Räumen
die Begriffe kompakt, abzählbar kompakt und folgenkompakt zusammenfallen, vgl.
Definition 12.11.5.
12.14.6 Korollar (*). Sei (X, d) ein metrischer Raum. Ist K ⊆ X kompakt, dann ist K
separabel, hat also eine dichte abzählbare Teilmenge.
Beweis. Nach Satz 12.14.3 gibt es zu n ∈ N endlich viele Punkte xn1 , . . . , xnm(n) ∈ K,
sodass
U 1 (xn1 ) ∪ · · · ∪ U 1 (xnm(n) ) ⊇ K .
(12.24)
n
n
S
n
n
Setzen wir D := n∈N {x1 , . . . , xm(n) }, so ist D sicher eine abzählbare Teilmenge von
K. Ist y ∈ K und ǫ > 0, so sei n ∈ N so groß, dass ǫ ≤ n1 . Wegen (12.24) gibt es ein
j ∈ {1, . . . , m(n)} mit d(y, xnj ) < 1n ≤ ǫ und daher xnj ∈ Uǫ (y). Also ist y ∈ D.
❑
12.14.7 Proposition (*). Ein metrischer Raum (X, d) ist genau dann separabel, wenn
er das zweite Abzählbarkeitsaxiom erfüllt, also eine abzählbare Basis hat.
12.14. KOMPAKTHEIT IN METRISCHEN RÄUMEN
187
Beweis. Ist B eine abzählbare Basis von T (d), so sei xB irgendein Punkt aus B für jede
nichtleere Teilmenge B ∈ B. Klarerweise ist D := {xB : ∅ , B ∈ B} abzählbar. Ist y ∈ X
und O ∋ y offen, so gilt sicher y ∈ B ⊆ O für ein B ∈ B. Somit gilt O ∩ D ∋ xB und
daher y ∈ D. Also ist X separabel.
Ist umgekehrt (X, d) separabel mit einer abzählbaren und dichten Teilmenge D ⊆ X,
so besteht B := {U 1 (x) : n ∈ N, x ∈ D} sicherlich aus abzählbar vielen Mengen. Ist
n
2 (y) ⊆ O.
nun O ⊆ X offen, so sei für jedes y ∈ O die Zahl n(y) ∈ N so groß, dass U n(y)
Wir zeigen nun, dass
[
O=
(12.25)
U 1n (x) ,
x∈D∪O
n∈N:U 1 (x)⊆O
n
und somit dass B eine Basis von T (d) ist. Klarerweise ist die rechte Seite in O enthal1 (y) ⊆ D ∩ O. Somit folgt
ten. Ist y ∈ O, so gibt es wegen der Dichtheit ein x ∈ D ∩ U n(y)
1 (x) und für jedes t ∈ U 1 (x)
y ∈ U n(y)
n(y)
d(t, y) ≤ d(t, x) + d(x, y) <
1
1
2
+
=
,
n(y) n(y) n(y)
also t ∈ U 2 (y) und somit U 1 (x) ⊆ U 2 (y) ⊆ O. Also liegt jedes y ∈ O in der
n(y)
n(y)
n(y)
Vereinigung auf der rechten Seite von (12.25).
❑
12.14.8 Bemerkung (*). Da wir im ersten Beweisteil nicht verwendet haben, dass T (d)
eine metrische Topologie ist, gilt allgemein in topologischen Räumen, dass aus (ABII)
die Separabilität folgt.
Ein wichtiges Beispiel von kompakten Teilmengen eines vollständigen metrischen
Raumes liefert uns der Satz von Ascoli. Dabei betrachtet man den Raum Cb (X, R) bzw.
Cb (X, C) aller beschränkten, stetigen und reell- bzw. komplexwertigen Funktionen auf
einem topologischen Raum (X, T ). Wir haben solche Räume schon kennengelernt, aber
nur in dem Fall, dass X ein metrischer Raum ist.
Wir wollen zunächst bemerken, dass wenn X kompakt ist, jede stetige Funktion f
automatisch beschränkt ist, denn nach Lemma 12.11.8 ist dann f (X) kompakt und nach
Proposition 5.2.8 ist f (X) beschränkt.
12.14.9 Lemma. Die Räume Cb (X, R) und Cb (X, C) sind abgeschlossene Teilräume der
Banachräume B(X, R) und B(X, C) versehen mit k.k∞ und daher selbst Banachräume.
Beweis. Wir wissen aus Beispiel 9.1.8, dass B(X, R) und B(X, C) Banachräume sind.
Laut Definition sind Cb (X, R) und Cb (X, C) Teilmengen von B(X, R) bzw. B(X, C).
Wegen Korollar 12.6.9 sind sie sogar lineare Teilräume.
Sei nun fn ∈ Cb (X, R) (Cb (X, C)) mit fn → f in B(X, R) (B(X, C)) bezüglich k.k∞ ,
also gleichmäßig. Ist x ∈ X und (x j ) j∈J ein gegen x konvergentes Netz, so wissen wir
aus Lemma 8.7.1, dass lim j∈J limn→∞ fn (x j ) = lim j∈J f (x j ) existiert und mit
lim lim fn (x j ) = lim fn (x) = f (x)
n→∞ j∈J
n→∞
übereinstimmt. Da das Netz beliebig war, ist f stetig, dh. f ∈ Cb (X, R) (Cb (X, C)).
❑
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
188
12.14.10 Satz (Ascoli). Sei (X, T ) ein kompakter topologischer Raum und sei Φ eine
punktweise beschränkte und gleichgradig stetige Teilmenge von Cb (X, C), d.h. Φ ⊆
Cb (X, C) mit:
(i) Für jedes x ∈ X ist sup{| f (x)| : f ∈ Φ} beschränkt.
(ii) Für jedes x ∈ X und ǫ > 0 gibt es eine Umgebung V ∈ U(x) mit | f (y) − f (x)| < ǫ
für alle y ∈ V, f ∈ Φ.
Dann ist Φ total beschränkt. Ist umgekehrt Φ total beschränkt, so gelten (i) und (ii).
Eine entsprechende Aussage gilt für Cb (X, R).
Beweis. Erfülle Φ die Bedingungen (i) und (ii). Wir zeigen, dass Φ total beschränkt ist.
Dazu sei ǫ > 0 gegeben. Zu jedem x ∈ X können wir eine Umgebung V x von x
wählen, sodass (ii) für V = V x erfüllt ist. Da jede Umgebung von x eine x enthaltende
offene Menge enthält, können wir die V x offen wählen. Offensichtlich ist V x , x ∈ X,
eine offene Überdeckung von X.
S
Da X kompakt ist, existieren x1 , . . . , xn ∈ X, sodass schon X = ni=1 V xi und
| f (x) − f (xi )| < ǫ, x ∈ V xi , f ∈ Φ, i = 1, . . . , n .
Wegen (i) ist sicher
M := sup{ f (xi ) : i = 1, . . . , n, f ∈ Φ} < ∞ .
n
C
Sei K M
(0) = {(z1 , . . . , zn )T ∈ C : k(z1 , . . . , zn )T k ≤ M} die abgeschlossene Kreisscheibe
mit Radius M im Cn bezüglich der Norm k(w1 , . . . , wn )T k := max j=1,...,n |w j | auf Cn .
Cn
Dann haben wir eine Abbildung p : Φ → K M
(0), definiert als
p( f ) := f (x1 ), . . . , f (xn )
n
T
.
n
C
C
Nun ist K M
(0) ⊆ Cn kompakt und daher total beschränkt; vgl. Satz 12.14.3. Mit K M
(0)
Cn
ist auch die Teilmenge p(Φ) von K M (0) total beschränkt; vgl. Fakta 12.14.2. Also
existieren endlich viele f1 , . . . , fm ∈ Φ, sodass es für jedes f ∈ Φ ein k ∈ {1, . . . , m}
gibt mit kp( f ) − p( fk )k < ǫ, bzw. äquivalent dazu mit
| f (xi ) − fk (xi )| < ǫ, i = 1, . . . , n .
Sei nun f ∈ Φ und k ∈ {1, . . . , m}, sodass | f (xi ) − fk (xi )| < ǫ, i = 1, . . . , n. Jedes x ∈ X
liegt in einer Menge V xi , und für dieses i gilt
| f (x) − f (xi )| < ǫ, | fk (x) − fk (xi )| < ǫ .
Es folgt
| f (x) − fk (x)| ≤ | f (x) − f (xi )| + | f (xi ) − fk (xi )| + | fk (x) − fk (xi )| < 3ǫ
für alle x ∈ X und somit k f − fk k∞ ≤ 3ǫ. Die abgeschlossenen Kugeln mit Radius 3ǫ
und Mittelpunkt fk überdecken also ganz Φ, und somit ist Φ total beschränkt.
Zur Umkehrung sei zunächst bemerkt, dass total beschränkte Mengen sicherlich
beschränkt in (Cb (X, C), k.k∞ ) und somit auch punktweise beschränkt sind; also gilt (i).
Wegen der totalen Beschränktheit gibt es zu ǫ > 0 endlich viele f1 , . . . , fm ∈ Φ,
sodass es zu jedem f ∈ Φ ein fk mit k f − fk k∞ < ǫ gibt.
12.15. ÜBUNGSBEISPIELE
189
Zu einem x ∈ X gibt es wegen der Stetigkeit der fk ’s für k = 1, . . . , m, Umgebungen
Vk ∈ U(x) mit | fk (y) − fk (x)| < ǫ für alle y ∈ Vk . Setzen wir V = V1 ∩ · · · ∩ Vm , so ist
V ∈ U(x) und für f ∈ Φ folgt für das richtige fk und y ∈ V
| f (y) − f (x)| < | f (y) − fk (y)| + | fk (y) − fk (x)| + | f (x) − fk (x)| < 3ǫ ,
und somit (ii).
❑
12.14.11 Korollar. Für Φ ⊆ Cb (X, C) ist Φ genau dann kompakt, wenn Φ punktweise
beschränkt und gleichgradig stetig ist. Insbesondere enthält in diesem Fall jede Folge
in Φ eine gleichmäßig konvergente Teilfolge.
Eine entsprechende Aussage gilt für Cb (X, R).
Eine wichtige Anwendung dieses Satzes gibt es in der Theorie der gewöhnlichen
Differentialgleichungen, wo dieser die Existenz von Lösungen von einer großen Klasse
von Differentialgleichungen liefert.
12.15 Übungsbeispiele
12.1 Sei hX, di ein metrischer Raum. Zeige: Die Abbildung
d̂(x, y) :=
d(x, y)
, x, y ∈ X ,
1 + d(x, y)
ist eine Metrik auf X, sodass T (d) = T (d̂). Es gilt stets 0 ≤ d̂(x, y) ≤ min 1, d(x, y) .
Anmerkung: d und d̂ erzeugen zwar die selbe Topologie, sind aber im Allgemeinen nicht
äquivalent im Sinne von (12.7).
12.2 Sei f : M → N eine Funktion, und F ein Filter auf M. Man zeige, dass f (F) = { f (F) : F ∈
F} eine Filterbasis eines Filters G auf N ist. Man zeige auch, dass G = {G ⊆ N : f −1 (G) ∈
F} ist. Man gebe schließlich ein Beispiel an, sodass f (F) zwar eine Filterbasis, aber kein
Filter ist.
12.3 Sei X eine nichtleere Menge und d die diskrete Metrik, dh. d(x, y) = 1, x , y und d(x, x) =
0. Man zeige, dass dann T (d) = P(X).
12.4 Man betrachte X := {1, 2, 3}, T := {∅, {1}, {1, 2}, X}. Man zeige, dass (X, T ) ein Topologischer Raum ist. Ist er Hausdorffsch? Weiters bestimme man den Umgebungsfilter und eine
möglichst kleine Filterbasis davon um jeden Punkt x ∈ X.
Schließlich bestimme man den Abschluss einer jeden Teilmenge von X!
12.5 Man zeige: Ist (X, T ) ein Hausdorffraum und x ∈ X, so gilt immer ∩U∈U(x) U = {x}. Weiters
zeige man, dass {x} ⊆ X abgeschlossen ist.
12.6 Sei X eine nichtleere Menge, und definiere T1 , T2 ⊆ X als
T1 := A ⊆ X : A = ∅ oder X \ A endlich ,
T2 := A ⊆ X : A = X oder A endlich .
Für welche X sind T1 bzw. T2 Topologien? Begründen Sie Ihre Antwort!
Hinweis: Unterscheide die Fälle, dass X endlich oder unendlich ist.
12.7 Sei T die Topologie T1 aus dem letzten Beispiel! Man spricht von der cofiniten Topologie
auf der Menge X.
(i) Ist die cofinite Topologie Hausdorff?
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
190
(ii) Erfüllt sie das Trennungsaxiom T 3 ?
(iii) Erfüllt sie das Trennungsaxiom T 4 ?
12.8 Sei T wie im vorherigen Beispiel die cofiniten Topologie auf der Menge X.
(i) Bestimme alle abgeschlossenen Teilmengen und den Abschluss einer beliebigen Teilmenge von X.
(ii) Ist hX, T i kompakt?
(iii) Für welche X ist T eine metrische Topologie, dh. es gibt eine Metrik d, sodass T =
T (d)?
12.9 Für eine topologischen Raum (X, T ) zeige man:
(i) B ⊆ X ⇒ B◦ ⊆ B.
(ii) C ⊆ B ⇒ C ◦ ⊆ B◦ .
(iii) B ⊆ X ist genau dann offen, wenn B = B◦ .
(iv) C, B ⊆ X ⇒ (C ∩ B)◦ = C ◦ ∩ B◦.
12.10 Für eine topologischen Raum (X, T ) und M ⊆ X sei ∂M := M \ M ◦ ! Man zeige:
(i) ∂M ist immer abgeschlossen.
(ii) ∂M = {x ∈ X : ∀U ∈ U(x) ⇒ U ∩ M , ∅ , U \ M}.
(iii) ∂M = ∂(M c ).
(iv) ∂M = ∅ ⇐⇒ M, M c ∈ T .
12.11 Zeigen Sie, dass in einem topologischen Raum der Durchschnitt von endlich vielen offenen
und dichten Mengen wieder offen und dicht ist.
12.12 Sei G eine Gruppe und T eine Topologie auf G, sodass für alle g ∈ G die Abbildungen
h 7→ gh und h 7→ hg stetig sind. Zeigen Sie, dass für jedes g ∈ G diese Abbildungen sogar
Homöomorphismen sind. Zeigen Sie, auch dass eine Untergruppe H von G, welche bzgl.
T offen ist, auch abgeschlossen ist!
Hinweis: Zeigen Sie, dass {gH : g ∈ G} eine Partition abgibt, also dass dieses Mengensystem die Restklassenmenge einer Äquivalenzrelation ist.
12.13 Sei X = R2 versehen mit der von d2 induzierten Topologie. Weiters sei Y = (−1, 1)×(−1, 1)
versehen mit der von der Einschränkung d2 |Y×Y von d2 auf Y induzierten Topologie. Man
gebe einen Homöomorphismus von X auf Y an!
12.14 Zeigen Sie, dass die chordale Metrik χ (siehe Übungsbeispiel 6.38) und die 2-Metrik d2
auf R2 C die selbe Topologie induzieren, aber dort nicht äquivalent sind!
12.15 Sei f : X → Y mit topologischen Räumen (X, TX ) und (Y, TY ), wobei (X, TX ) das erste
Abzählbarkeitsaxiom erfüllt. Zeigen Sie, dass f bei x ∈ X genau dann stetig ist, wenn für
jede Folge (xn ) aus X mit Grenzwert x folgt, dass f (xn ) → f (x)!
12.16 Ist (X, T ) ein topologischer Raum und B eine Basis von T , so zeige man zunächst, dass für
jedes x ∈ X {B ∈ B : x ∈ B} eine Filterbasis des Umgebungsfilters U(x) von x ist. Schließlich zeige man, dass (X, T ) separabel ist (enthält also eine abzählbare dichte Teilmenge),
wenn (X, T ) das zweite Abzählbarkeitsaxiom erfüllt!
Hinweis für den zweiten Teil: Man greife aus jedem B einen Punkt heraus, wobei B alle
Mengen einer abzählbaren Basis durchläuft, und zeige die Dichtheit dieser Menge in X!
12.17 Zeigen Sie, dass für einen metrischen Raum (X, d) auch die Umkehrung gilt: Ist (X, T (d))
separabel (enthält also eine abzählbare dichte Teilmenge), dann erfüllt (X, T (d)) das zweite
Abzählbarkeitsaxiom!
Hinweis: Betrachte {Uǫ (x) : x ∈ D, Q ∋ ǫ > 0} mit D ⊆ X abzählbar und dicht!
12.15. ÜBUNGSBEISPIELE
191
12.18 Mit der Notation aus dem Übungsbeispiel 12.4 zeige man: Jede Basis B der Topologie T
muss schon mit T oder mit {{1}, {1, 2}, X} übereinstimmen. Weiters zeige man: V ist eine
Subbasis von T genau dann wenn V ⊇ {{1}, {1, 2}}.
12.19 Sei (X, T ) ein kompakter topologischer Raum und f : X → R stetig. Dann zeigen Sie, dass
f ein Maximum und ein Minimum auf X hat.
12.20 Seien (Xn , dn ), n ∈ N, metrische Räume. Weiters seien (cn )n∈N und (c̃n )n∈N Folgen positiver
P
Q
2
reeller Zahlen mit cn → 0 bzw. ∞
→
n∈N Xn
n=1 c̃n < ∞. Definiere Abbildungen d, d̃ :
R durch
dn ( fn , gn ) ,
d( f, g) := max cn
n∈N
1 + dn ( fn , gn )
d̃( f, g) :=
∞
X
c̃n
n=0
dn ( fn , gn )
,
1 + dn ( fn , gn )
Q
wobei f = ( fn )n∈N , g = (gn )n∈N ∈ n∈N Xn . Zeige, dass d und d̃ Metriken sind, und dass
Q
sowohl T (d) als auch T (d̃) mit n∈N T (dn ) übereinstimmt.
12.21 Sei (Y, T ) ein Topologischer Raum und sei X ⊆ Y versehen mit der Spurtopologie T |X .
Man weise nach:
(i) U ⊆ X ist genau dann eine Umgebung eines x ∈ X bezüglich T |X , falls U = X ∩ V
für eine Umgebung V von x bezüglich T .
(ii) Ist A ⊆ X und ist A der Abschluss von A in (Y, T ), so ist A ∩ X genau der Abschluss
von A in (X, T |X ).
(iii) Sei (Z, O) ein weiterer topologischer Raum und f : Y → Z eine stetige Funktion.
Dann ist auch f |X : X → Z stetig, wenn man X mit T |X versieht.
12.22 Gibt es in R nichttriviale Teilmengen, dh. , ∅ und , R, die bzgl. E := T (d2 ) gleichzeitig
offen und abgeschlossen sind?
Hinweis: Der Begriff Zusammenhang aus dem ersten Semester!
12.23 Seien hXi , Ti i, i ∈ I, topologische Räume, sei Y eine Menge, und seien fi : Y → Xi ,
i ∈ I, Abbildungen. Bezeichne mit T die initiale Topologie auf Y bezüglich der Familie
{ fi : i ∈ I} von Abbildungen.
Sei vorausgesetzt, dass die Familie { fi : i ∈ I} punktetrennend operiert, d.h. dass es zu je
zwei verschiedenen Punkten a, b ∈ Y eine Funktion fi0 gibt mit fi0 (a) , fi0 (b). Zeigen Sie:
Sind alle Räume hXi , Ti i Hausdorff, so hat auch hY, T i diese Eigenschaft. Zeigen Sie auch:
Q Q
Sind alle Räume (Xi , Ti ) Hausdorff, so auch ( Xi , Ti ).
Q
12.24 Sei X = R[0,1] = x∈[0,1] R die Menge aller reellwertigen Funktionen mit Definitionsbereich
D = [0, 1] versehen mit der Produkttopologie.
Man zeige, dass für f ∈ X das Mengensystem
{V x1 ,...,xn ;ǫ ( f ) : n ∈ N; x1 , . . . , xn ∈ D; ǫ > 0} ,
wobei
V x1 ,...,xn ;ǫ ( f ) := {g ∈ X : |g(x j ) − f (x j )| < ǫ, j = 1, . . . , n} ,
eine Filterbasis des Umgebungsfilters U( f ) von f abgibt. Sind die Mengen V x1 ,...,xn ;ǫ ( f )
offen bzgl. der Produkttopologie? Zeigen Sie auch, dass der Umgebungsfilter von f keine
Filterbasis bestehend aus abzählbar vielen Mengen besitzt. Gibt es dann eine Metrik d,
sodass T (d) = T ?
Hinweis: Falls es eine abzählbare Filterbasis (Uk )k∈N von U( f ) gibt, so konstruiere man
induktiv x11 , . . . x1n1 , x21 , . . . x2n2 , · · · ∈ [0, 1] und eine Nullfolge ǫ1 ≥ ǫ2 ≥ · · · > 0, sodass
V x1 ,...x1n ,...,xk ,...xkn ;ǫk ( f ) ⊆ Uk und daher auch (V x1 ,...x1n ,...,xk ,...xkn ;ǫk ( f ))k∈N eine Filterbasis abgibt.
1
1
1
1
1
k
1
k
T
Nun zeige man g ∈ k∈N V x1 ,...x1n ,...,xk ,...xkn ;ǫk ( f ) ⇔ g(xkj ) = f (xkj ), ∀k ∈ N, j ∈ {1, . . . , nk }.....
1
1
1
k
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
192
12.25 Mit der Notation aus dem vorherigen Beispiel sei B(D) die Teilmenge aller beschränkten
Funktion von X. Also B(D) = { f ∈ X : supt∈D | f (t)| < +∞}.
Sei nun T1 die von der Supremumsmetrik (d∞ ( f, g) := supt∈D | f (t) − g(t)|) erzeugte Topologie auf B(D), und sei T2 die Spurtopologie T |B(D) , wobei T die Produkttopologie aus dem
vorherigen Beispiel ist.
Man zeige: Wenn f j → f für ein Netz aus B(D) bzgl. T1 dann gilt auch f j → f bzgl.
T2 . Die Umkehrung gilt aber nicht. Man zeige auch, dass T1 echt feiner als T2 ist, bzw.
äquivalent dazu dass id : (B(D), T1 ) → (B(D), T2 ) stetig ist, aber id : (B(D), T2 ) →
(B(D), T1 ) nicht stetig ist.
12.26 Indem man eine offene Überdeckung angibt, die keine endliche Teilüberdeckung hat, zeige
man, dass (0, 1] als Teilmenge von R versehen mit E = T (d2 ) nicht kompakt ist und dass
eine unendliche Menge X versehen mit der diskreten Topologie nicht kompakt ist.
12.27 Sei M eine dichte Teilmenge von R. Man zeige, dass {(−∞, q) : q ∈ M} ∪ {(q, ∞) : q ∈ M}
eine Subbasis der von der Euklidischen Metrik erzeugten Topologie (Euklidischen Topologie) ist.
12.28 Zeigen Sie, dass jeder metrische, kompakte Raum auch separabel ist, also eine abzählbare
dicht Menge enthält!
12.29 Seien (X1 , T1 ) und (X2 , T2 ) kompakte topologische Räume. Man zeige ohne den Satz von
Tychonoff, dass X1 × X2 versehen mit der Produkttopologie kompakt ist!
Hinweis: Siehe Fakta 8.7.8 für den metrischen Fall!
12.30 Sei [−∞, +∞) versehen mit T := {[−∞, a) : a ∈ [−∞, +∞]}. Zeigen Sie, dass T eine
Topologie ist, die nicht Hausdorffsch ist! Bestimmen Sie U(x) für x ∈ [−∞, +∞)! Zeigen
Sie, dass für ein Netz (xi )i∈I aus [−∞, +∞), (xi )i∈I → x bzgl. T genau dann wenn x ∈
[lim supi∈I xi , +∞), wobei man allgemein für ein Netz aus [−∞, +∞) definiert
lim sup xi = inf sup xi (∈ [−∞, +∞]) .
i∈I
k∈I I∋ik
12.31 Für die Topologie aus dem vorherigen Beispiel zeige man, dass eine Teilmenge von
[−∞, +∞) genau dann kompakt ist, wenn sie nach oben beschränkt ist und ihr Supremum
enthält! Gibt es in [−∞, +∞) kompakte, nicht abgeschlossene Teilmengen?
12.32 Sei I eine gerichtete Menge und ∞ ein nicht in I enthaltenes Element. Man versehe I ∪ {∞}
derart mit einer Topologie, sodass für jeden topologischen Raum X und jedes Netz (xi )i∈I
in X mit betrefflicher Menge I als Indexmenge und jedes x ∈ X folgende beiden Aussagen
äquivalent sind:
xi → x, i ∈ I.
f : I ∪ {∞} → X ist stetig, wobei f (i) = xi und f (∞) = x.
12.33 Sei (G, T ) eine topologische Gruppe, also eine Gruppe versehen mit einer Topologie, sodass (g, h) 7→ gh als Abbildung von G × G (versehen mit der Produkttopologie) nach G und
g 7→ g−1 als Abbildung von G nach G stetig sind. Weiters seien M1 , M2 Teilmengen von G.
Weisen Sie nach, dass wenn (I, ) eine gerichtete Menge und (xi )i∈I , (yi )i∈I zwei Netze in
G über dieser gerichteten Menge mit xi → x und yi → y für x, y ∈ G sind, dann auch
xi yi → xy.
Weiters zeige man, dass wenn M1 und M2 kompakt sind, dann auch M1 · M2 eine kompakte
Teilmenge von G ist.
12.34 Mit der Notation aus vorherigen Beispiel zeige man, dass M1 · M2 abgeschlossen ist, wenn
eine der beiden Mengen abgeschlossen und die andere kompakt ist.
Hinweis: Nehmen Sie an, dass z im Abschluss von M1 · M2 ist, und betrachten Sie ein Netz,
dass aus M1 · M2 heraus gegen z konvergiert!
Anmerkung: M1 · M2 ist am Allgemeinen nicht abgeschlossen, wenn man nur fordert, dass
M1 und M2 abgeschlossen
sind. Beispielsweise sind in der
√
√ topologischen Gruppe (R, +)
die Mengen Z und 2Z abgeschlossen. Die Menge Z + 2Z ( R ist aber dicht in R und
damit nicht abgeschlossen.
12.15. ÜBUNGSBEISPIELE
193
12.35 Zeigen Sie, dass Φ = { f ∈ C 1 [0, 1] : f (0) = 0, k f ′ k∞ ≤ 1} als Teilmenge von C([0, 1], R)
relativ kompakt ist, dh. dass Φ kompakt ist.
12.36 Man gebe an, ob Φ ⊆ C(K, R) total beschränkt ist, wobei
(a) K = [0, 1] und Φ = {(t 7→ tn ) : n ∈ N}
(b) K = [0, 1] und Φ = { f ∈ C(K, R) : k f k∞ ≤ 1}
(c) K = [0, 1] und Φ = {(t 7→
(d) K = [0, 2] und Φ = {(t 7→
tn
)
n
tn
n
: n ∈ N}
) : n ∈ N}
12.37 Ist Φ = {(t 7→ tn ) : n ∈ N} ⊆ C([0, 1), R) gleichgradig stetig? Begründung!
12.38 Zeigen Sie, dass für einen kompakten metrischen Raum K ein Φ ⊆ C(K, R) genau dann total beschränkt ist, wenn Φ als Teilmenge des normierten Raumes (C(K, R), k.k∞ ) beschränkt
ist und wenn Φ gleichmäßig und gleichgradig stetig ist.
Letzteres bedeutet, dass es zu jeden ǫ > 0 ein δ > 0 gibt, sodass | f (x) − f (y)| < ǫ für alle
f ∈ Φ und alle x, y ∈ X mit d(x, y) < δ.
194
KAPITEL 12. TOPOLOGISCHE GRUNDLAGEN
Kapitel 13
Lemma von Zorn*
In diesem Anhang wollen wir insbesondere einen Beweis des Lemmas von Zorn bringen, das im Beweis des Satzes von Tychonoff, Satz 12.13.6, verwendet wurde.
Ordnungen
13.0.1 Definition. Sei M eine Menge, und eine Relation auf M, d.h. ist eine Teilmenge von M × M. Dann heißt Halbordnung auf M, oder kurz (M, ) Halbordnung,
falls folgende drei Axiome gelten:
Reflexiv: x ∈ M ⇒ x x.
Antisymmetrisch: x y ∧ y x ⇒ x = y.
Transitiv: x y ∧ y z ⇒ x z.
Eine Halbordnung (M, ) heißt Totalordnung, falls je zwei Elemente vergleichbar
sind, d.h.
x, y ∈ M ⇒ x y ∨ y x.
13.0.2 Definition. Sei eine Halbordnung auf der Menge M.
Ist R ⊆ M, dann heißt y obere (untere) Schranke von R, falls x y (y x) für alle
x ∈ R.
Ist R ⊆ M, dann heißt ein m ∈ R maximales (minimales) Element von R, falls aus
x ∈ R ∧ m x (x ∈ R ∧ x m) folgt, dass x = m. Ein maximales (minimales) Element
m heißt größtes (kleinstes) Element von R, wenn x m (m x) für alle x ∈ R.
Ist R ⊆ M, dann heißt y Supremum oder kleinste obere Schranke (Infimum oder
größte unter Schranke) von R, falls y eine obere (untere) Schranke von R ist, und gleichzeitig y x (x y) für alle oberen (unteren) Schranken x von R gilt.
13.0.3 Definition. Sei eine Halbordnung auf der Menge M. Dann heißt (M, ) Verband, wenn jede zweielementige Teilmenge von M ein Supremum und ein Infimum
hat.
Ein Verband (M, ) heißt vollständig, falls jede Teilmenge von M ein Supremum
und ein Infimum hat.
195
KAPITEL 13. LEMMA VON ZORN*
196
Ist M eine Menge, so ist P(M) versehen mit der Mengeninklusion ein vollständiger
Verband. Ein weiters Beispiel ist die Menge aller Topologien auf einer Menge.
Das nun folgende Lemma von Zorn ist ein fundamentales Hilfsmittel aus der Mengenlehre. Es ist äquivalent zum Auswahlaxiom und zum Wohlordnungssatz und war
von daher vor allem in der ersten Hälfte des 20. Jahrhunderts umstritten. Mittlerweile
sind die Mathematiker entspannter, auch wenn ein möglicher Verzicht auf das Auswahlaxiom immer noch in manchen Situationen explizit hervorgehoben wird.
13.0.4 Definition (Auswahlaxiom). Gegeben sei eine Indexmenge I und eine Familie
von nichtleeren Mengen Ai , i ∈ I, so existiert eine Funktion (Auswahlfunktion) f :
S
I → i∈I Ai , sodass f (i) ∈ Ai .
Q
Man beachte, dass das Auswahlaxiom nichts anderes besagt als, dass i∈I Ai , ∅.
13.0.5 Definition. Sei (M, ≤) eine halbgeordnete Menge. Wenn für jede total geordnete Teilmenge von M eine obere Schranke existiert, dann heißt M induktiv geordnet.
Wenn sogar jeweils eine kleinste obere Schranke existiert, dann heißt M strikt induktiv
geordnet.
Folgendes Lemma ist der zentrale Hilfsatz zum Beweis des Lemma von Zorn.
13.0.6 Lemma. Es sei (M, ≤) eine nichtleere halbgeordnete Menge mit einem kleinsten
Element o, sodass M strikt induktiv ist. Schließlich sei F : M → M eine Abbildung mit
der Eigenschaft (Monotonie)
m ≤ F(m), m ∈ M.
Dann gibt es ein m ∈ M mit F(m) = m.
Beweis. Wie nennen eine Teilmenge S von M zulässig, wenn die folgenden drei Bedingungen gelten: o ∈ S , F(S ) ⊆ S , und für jede total geordnete Teilmenge T ⊆ S
liegt auch die kleinste obere Schranke sup T in S . Zum Beispiel ist M selbst zulässig.
Nun sei S 0 der Durchschnitt aller zulässigen Teilmengen von M. Da in jeder
zulässigen Teilmenge auch o liegt, enthält der Durchschnitt zumindest das Element
o . Außerdem gelten auch die beiden anderen Bedingungen für Zulässigkeit. Also ist
S 0 selbst zulässig und damit die kleinste aller zulässigen Teilmengen von M.
Wenn wir nun zeigen können, dass S 0 total geordnet ist, dann folgt daraus für die
kleinste obere Schranke sup S 0 , dass sup S 0 das größte Element von S 0 ist. Somit gilt
wegen der Zulässigkeit F(sup S 0 ) ≤ sup S 0 . Wir bekommen insgesamt
sup S 0 ≤ F(sup S 0 ) ≤ sup S 0 ,
und damit die gewünschte Gleichheit. Noch zu zeigen ist also die Behauptung, dass S 0
total geordnet ist.
Für den Beweis nennen wir e ∈ S 0 ein extremales Element, wenn für alle s ∈ S 0
mit s ≤ e, s , e (s < e) gilt, dass F(s) ≤ e. Zum Beispiel ist o extremal. Für ein
extremales e setzen wir
S e := {s ∈ S 0 : s ≤ e ∨ F(e) ≤ s}.
Dann ist für jedes extremale e die Menge S e zulässig:
• o liegt in S e .
197
• Für jedes Element s ∈ S e folgt aus s < e schon F(s) ≤ e, aus s = e folgt F(s) =
F(e), und aus s e folgt F(e) ≤ s ≤ F(s). Also gilt insgesamt F(S e ) ⊆ S e .
• Es sei T eine total geordnete Teilmenge von S e . Wenn dann für alle t ≤ sup T
die Ungleichung t ≤ e gilt, dann gilt auch sup T ≤ e. Wenn es aber mindestens
ein t gibt, sodass t e gilt, dann ist F(e) ≤ t ≤ sup T . Wir sehen also in beiden
Fällen, dass sup T ∈ S e .
Da aber S 0 die kleinste zulässige Teilmenge von M ist, muss also für alle extremalen e gelten:
S e = S 0.
Nun müssen wir noch zeigen, dass jedes e ∈ S 0 extremal ist. Dann folgt nämlich für
s ∈ S 0 , dass s ∈ S e bzw.
s ≤ e ∨ e ≤ F(e) ≤ s,
also die Tatsache, dass S 0 total geordnet ist.
Um zu beweisen, dass jedes e ∈ S 0 extremal ist, betrachten wir
E := {e ∈ S 0 : e ist extremal}.
Wir weisen nach, dass E zulässig und damit gleich S 0 ist.
• o ∈ E ist klar.
• Wir müssen zeigen, dass mit e auch F(e) in E liegt. Ist s ∈ S 0 = S e und s < F(e),
so müssen wir F(s) ≤ F(e) folgern. Da s ∈ S e , gilt s ≤ e oder F(e) ≤ s, wobei
wir letzteres wegen unserer Voraussetzung ausschließen können. Aus s = e folgt
trivialerweise F(s) ≤ F(e) und aus s < e folgt wegen e ∈ E, dass F(s) ≤ e ≤
F(e).
• Nun sei noch T ⊆ E total geordnet. Zu zeigen ist, dass sup T ∈ E. Sei dazu
s ∈ S 0 , s < sup T . Wenn für jedes t ∈ T die Relation F(t) ≤ s gelten würde,
dann wäre wegen t ≤ F(t) auch sup T ≤ s. Das ist ein Widerspruch. Also gibt es
ein extremales e ∈ T mit F(e) s, und da S 0 = S e gilt, folgt daraus zwangsweise
s ≤ e. Ist s , e, so folgt wegen e ∈ E, dass F(s) ≤ e ≤ sup T . Da sup T ∈ S 0 =
S e , s < sup T folgt aus s = e, dass F(s) = F(e) ≤ sup T . Damit folgt insgesamt,
dass sup T extremal ist.
❑
Nun können wir das Lemma von Zorn aus dem Auswahlaxiom herleiten.
13.0.7 Satz. Es sei (M, ≤) eine nichtleere induktiv geordnete Menge. Dann besitzt M
ein maximales Element.
Beweis. Wir behandeln zuerst den Fall einer strikt induktiv geordneten Menge.
Sei x ∈ M fest. Ist m maximales Element von {y ∈ M : x ≤ y}, so ist m auch
maximales Element von M. Also dürfen wir uns auf den Fall beschränken, dass M
ein kleinstes Element enthält. Wir nehmen an, es gebe kein maximales Element. Dann
finden wir für jedes m ∈ M ein größeres Element F(m) und definieren damit eine
Funktion F : M → M, für die gilt:
∀m ∈ M : m < F(m).
198
KAPITEL 13. LEMMA VON ZORN*
Man beachte, dass man für die Existenz einer solchen Funktion F das Auswahlaxiom
verwendet. In der Tat ist F eine Auswahlfunktion der Familie (Am )m∈M , wobei Am =
{x ∈ M : m ≤ x, m , x}. Da M strikt induktiv geordnet ist, folgt aus Lemma 13.0.6 der
Widerspruch F(m) = m für ein m ∈ M.
Nun sei M induktiv geordnet, und sei H die Menge aller total geordneten Teilmengen von M. Dann ist H bezüglich der Inklusion eine Halbordnung, und zwar eine strikt
S
induktive, denn ist T ⊆ H totalgeordnet (bzgl. ⊆), so ist es auch N∈T N (bzgl. ≤),
und diese Teilmenge von M ist auch die kleinste obere Schranke von T (bzgl. ⊆).
Also besitzt H nach dem ersten Beweisteil ein maximales Element T . Es sei O
eine obere Schranke von T . Dann muss O zu T gehören, da sonst T ∪ {O} eine total
geordnete Menge wäre, die T echt umfasste.
Dieses Element O ist dann ein maximales Element von M, denn für jedes m ∈ M
folgt aus O ≤ m, dass m eine obere Schranke von T ist, und somit ebenfalls zu T
gehören muss. Insbesondere folgt m ≤ O und damit m = O.
❑
Literaturverzeichnis
[B] N.Bourbaki: Elements of Mathematics: General Topology. Part 1,2, Hermann,
Paris 1966.
[F] G.M.Fichtenholz: Differential- und Integralrechnung I-III, Deutscher Verlag der
Wissenschaften, Berlin 1964.
[H] H.Heuser: Lehrbuch der Analysis 1,2, Teubner Verlag, Stuttgart 1989.
[L] S.Lang: A first course in calculus, Springer Verlag, Heidelberg 1986.
[R] W.Rinow: Lehrbuch der Topologie, VEB Deutscher Verlag der Wissenschaften,
Berlin 1975.
[R1] W.Rudin: Principles of Mathematical Analysis, McGraw-Hill, New York 1953,
third edition 1976.
[R2] W.Rudin: Real and Complex Analysis, McGraw-Hill, New York 1966, third edition 1987.
[W] W.Walter: Analysis 1,2, Springer Verlag, Heidelberg, New York Tokoyo.
199
Index
(T 1 ), 162, 166
(T 2 ), 141
(T 3 ), 164
(T 4 ), 164
Cb (E), 44
Cb (E, Y), 44
Cb (X, C), 184
Cb (X, R), 184
Cb [0, 1], 65
L(X, Y), 47
[B], 174
∆ f , 90
ℓ∞ (N, C), 64, 65
c0 , 44
c0 (N), 44
c0 (N, C), 64, 65
dk f (x), 79
d f (x), 70
k-te Ableitung, 80
l∞ , 44
l∞ (N), 44
B(E, Y), 43
C 1 , 68
C 1 (D), 68
C k , 77
Abbildung
Norm, 46
Abbildungsnorm, 46
Ableitung, 70
partielle, 67
Richtungs-, 67
absolut uneigentlich integrierbar, 19
Abzählbarkeitsaxiom
erstes, 139
zweites, 151
analytisch, 130
Archimedische Spirale, 133
Banachraum, 42
Basis
eines Filters, 139
beschränkt, 46
Bilinearform, 84
Bogenlänge, 98
Cauchy-Netz, 11
Cauchy-Riemannschen Differentialgleichungen, 119, 131
Cauchysche Integralformel, 126
Cauchyscher Integralsatz, 128
charakteristische Funktion, 13
Darbouxsches Integral, 3
dicht, 142
in B, 142
Differentialgleichung
exakte, 113
differenzierbar, 72
k-mal stetig, 77
partiell, 68
stetig, 72
stetig partiell, 68
Dreiecksungleichung, 41
Durchmesser einer Menge, 181
einfach zusammenhängend, 114
Endfilter, 176
endliche Durchschnittseigenschaft, 169
Euklidische Topologie, 138
Euler-Mascharonische Konstante, 36
Exponentialfunktion
Matrix-wertig, 61
Feinheit
einer Riemann-Zerlegung, 5
Filter, 138
feiner, 175
gröber, 175
konvergent, 175
Filterbasis, 139
konvergent, 175
folgenkompakt, 171
200
INDEX
Fréchet-differenzierbar, 76
Funktion
charakteristische, 13
ganze, 120
harmonische, 131
Indikator-, 13
von beschränkter Variation, 132
Funktion von beschränkter Variation, 98
Funktionen
stückweise stetig, 14
stückweise stetig differenzierbar, 97
Gebiet, 104
Gradient, 70
Gradientenfeld
lokales, 112
Gradientenfelder, 106
Häufungspunkt einer Filterbasis, 178
Häufungspunkt einer Menge, 144
Häufungspunkt eines Netzes, 145
Höldersche Ungleichung, 64
harmonisch, 131
Hausdorff, 141
Hesse-Matrix, 84
holomorph, 120
homöomorph, 149
Homöomorphismus, 149
Homotopie, 114
Indikatorfunktion, 13
Integral, 3
absolut konvergentes, 19
absolut uneigentliches, 19
Darbouxsches, 3
obere, 3
Riemann, 5
Riemann-Stiltjes, 100
uneigentliches, 19
von stetigen Funktionen, 12
Integration
Vertauschbarkeit der Reihenfolge, 26
von Funktionen in mehreren Variablen, 28
integrierbar, 3
Riemann-, 5
Integrierenden Faktor, 113
Kettenregel, 74, 122
kompakt, 169
201
abzählbar, 171
folgen-, 171
komplexen Ableitung, 120
Konvergenz
lokal gleichmäßige, 129
Konvergenz einer Reihe, 49
absolute, 49
Laplace, 131
Lemma von Urysohn, 167
lineare Abbildung
beschränkt, 46
Lipschitz stetig, 11, 15
lokales Gradientenfeld, 112
lokalkompakt, 169
Maximum
lokales, 83
Menge
abgeschlossene, 142
Abschluss einer, 142
gesättigte, 160
Inneres einer, 144
kompakte, 169
konvexe, 68
offene, 138
relativ kompakte, 169
total beschränkte, 181
zusammenhängende, 162
Mengen
durch offenen Mengen getrennte,
161, 164
getrennte, 161
Metriken
äquivalente, 149
Minimum
lokales, 83
Mittelwertsatz
der Integralrechnung, 32
Multiindex, 78
negativ definit, 84
negativ semidefinit, 84
Netz
Cauchy-, 11
Norm, 41
äquivalente, 45
normal, 164
Obersumme, 3
INDEX
202
offene Abbildung, 158
Oszillation, 11
Parameterintegral, 26
Parameterintegrale, 75
Differenzierbarkeit, 28
partielle Ableitung, 67
Partielle Integration, 17
Polygonzug, 93
Polynom in mehreren Variablen, 81
positiv definit, 84
positiv semidefinit, 84
Potenzreihe
Ableitung, 24
Produkt metrischer Räume, 25
Produkt von metrischen Räumen, 25
Produktregel, 122
Stammfunktion, 15
eines Gradientenfeldes, 106
stationärer Punkt, 83
stetig, 146
in einem Punkt, 146
Lipschitz, 11, 15
stetig differenzierbar, 72
k-mal, 77
Stetigkeit
gleichgradige, 185
Stirlingsche Formel, 37
Strecke
gerade, 93
Subbasis einer Topologie, 151
Substitutionsregel, 17
Tangentialebene, 72
Tangentialvektor, 54
Quotientenregel, 122
Taylorreihe
areatanh, 38
Raum
ln(1 − x), 25
T 2 -, 141
Taylorsche Formel, 80
Hausdorff, 141
Taylorsche Polynom
normierter, 41
mehrdimensionale, 81
topologischer, 138
Teilraum, 156
regulär, 164
Topologie, 138
Reihe
Basis von, 151
Banachraum-wertig, 49
diskrete, 138
von Neumannsche, 52
feinere, 150
Richtungsableitung, 67
finale, 159
Riemann-Stieltjes Integral, 100
gröbere, 150
Riemann-Zerlegung, 5
initiale, 154
Riemannsumme, 5
Klumpentopologie, 138
normale, 164
Satz
Produkt-, 157
Fortsetzungssatz von Tietze, 167
Quotienten-, 160
Hauptsatz
der
Differentialreguläre, 164
Integralrechnung, 14
Spur-, 156
Taylorsche Formel, 80
Subbasis von, 151
von Ascoli, 185
von einer Metrik, 138
von Fubini, 26
von Liouville, 128
Ultrafilter, 179
von Morera, 128
Umgebung, 138
von Schwarz, 77
Umgebungsfilter, 138
von Tychonoff, 180
uneigentlich integrierbar, 19
Schraubenlinie, 133
Ungleichung
separabel, 142
Höldersche, 64
stückweise stetig, 14
Untersumme, 2
stückweise stetig differenzierbar, 97
Vektorfeld, 99
Stützstellen, 5
INDEX
wegunabhängig, 106
Vektorfelder
stetig differenzierbare, 108
Vertauschbarkeit
Integrationsreihenfolge, 26
Grenzwert und Ableitung, 23
Grenzwert und Integration, 22
von Neumannsche Reihe, 52
Wallische Produktformel, 36
Weg, 93
geschlossener, 128
rektifizierbar, 94
stetig, 93
Wege
homotope, 114
Wegintegral, 99
komplexes, 117
zusammenhängend, 162
Zwischenstellen, 5
203